COMPARISON OF PHOTOCONSISTENCY MEASURES USED IN VOXEL COLORING
advertisement

COMPARISON OF PHOTOCONSISTENCY MEASURES USED IN VOXEL COLORING
Oğuz Özüna , Ulaş Yılmazb∗, Volkan Atalaya
a
Department of Computer Engineering, Middle East Technical University, Turkey – {oguz, volkan}@ceng.metu.edu.tr
b
Computer Vision & Remote Sensing, Berlin University of Technology, Germany – ulas@cs.tu-berlin.de
KEY WORDS: photoconsistency, voxel coloring, three-dimensional object modeling, standard deviation, Minkowsky distance, adaptive threshold, histogram, color caching.
ABSTRACT
A framework for the comparison of photoconsistency measures used in voxel coloring algorithm is described. With this framework,
the results obtained in generalized voxel coloring algorithm using certain photoconsistency measures are discussed qualitatively and
quantitatively. The photoconsistency measures are based on standard deviation, Minkowsky distance, adaptive threshold, histogram,
and color caching. Quantitative measurement is performed with root-mean-square-error and normalized-cross-correlation-ratio. The
results show that, the photoconsistency measures which require threshold(s) may produce better/worse results depending on the selected
threshold(s). Also, modeling textured objects always produce better reconstruction results.
1 INTRODUCTION
The main goal of volumetric scene modeling approaches is to find
out, whether a given point is on an object’s surface in the scene
or not. According to the information being used in reconstruction, these approaches are classified into two groups: shape-fromsilhouette and shape-from-photoconsistency. In shape-from-silhouette approaches, the model is extracted using back projections of
the silhouettes onto the images: Each back projected silhouette
corresponds to a volume in the space; intersection of these volumes gives the model (Mülayim et al., 2003). In shape-fromphotoconsistency approaches, on the other hand, the photoconsistency of light coming from a point in the scene is taken into
account: If the light coming from a point in the scene is not photoconsistent, then this point cannot be on a surface in the scene.
In both approaches, the space is modeled using volume elements,
voxels. Voxel coloring and its variations (space carving (Broadhurst and Cipolla, 2000, Kutulakos and Seitz, 2000), generalized
voxel coloring (Culbertson et al., 1999), multihypothesis voxel
coloring (Steinbach et al., 2000), etc.) are in shape-from-photoconsistency group. These variations differ in the way they determine
the visibility of a given voxel. When the same photoconsistency
measure is used, a significant difference in the output is not observed. So to say, in voxel coloring algorithm and in its variations, the reconstructed model highly depends on the used photoconsistency measure. In this study, generalized voxel coloring
algorithm is used to compare the effect of different photoconsistency measures. The experiments are performed on 3 image
sequences. Results obtained through different photoconsistency
measures are then compared using image comparison techniques,
root-mean-square-error and normalized-cross-correlation-ratio.
The organization of the paper is as follows: In the following section, voxel coloring algorithm used in this study is explained in
detail. This section is followed by Section 3 in which photoconsistency measures used in voxel coloring are presented. Qualitative comparison of photoconsistency measures is described in
Section 4. Results obtained in the framework of this study are
given in Section 5. The paper concludes with Section 6, in which
the results are discussed and comments about the presented photoconsistency measures are made.
∗ Corresponding
author.
2 SHAPE-FROM-PHOTOCONSISTENCY
Depending on surface properties, lighting conditions and viewing
direction, color of light coming from a point in the scene varies.
Nevertheless, different observations should be coherent. In other
words, a point on a surface should be seen with similar colors
when it is not occluded. This phenomenon is called photoconsistency. Shape-from-photoconsistency approaches of volumetric
scene reconstruction are based on this property of surfaces. If the
light coming from an unconcluded portion of the scene is photoconsistent, then this point should be on a surface in the scene.
Otherwise, it should be empty. This claim is based on a couple
of assumptions: Objects in the scene have Lambertian surfaces,
and projection of any point in the scene on the images can be
computed (Kutulakos and Seitz, 2000).
In this study, due to its easiness in implementation, generalized
voxel coloring algorithm is used. In order to improve computational cost, convex hull of the object is computed, and it is used
as the input of voxel coloring algorithm. For each view, voxel
space is divided into layers according to the distance to the view
point. From nearest to furthest, layers are traversed, and the voxels are checked for visibility. Initially, all pixels in all images are
unmarked. At each level, visible pixels are marked, so that the
visibility of voxels at the following layers can be decided. Assume that a voxel v at some further layer is visited. Compared
to the other voxels which are at nearer layers, it should have less
number of visible pixels in each image. Having extracted visible
pixels from all images, a set of colors is obtained. If this set is
photoconsistent, then the voxel is on the surface. The pixels are
marked and next voxel is processed. If the set is not photoconsistent, then the voxel is removed from the model. The ordinal visibility constraint and traversal of voxels based on layers makes it
possible to use pixel marking as an efficient tool to handle occlusions: Single sweep through the voxel space is enough to reduce
the voxel set to a more photoconsistent state. This procedure is
iterated until all voxels are photoconsistent.
3
PHOTOCONSISTENCY MEASURES
As it is mentioned in the previous section, removal or coloring
decision of a voxel depends on the set of colors, which is obtained by projecting the voxel onto the images. Given n images,
assume that I0 , I1 , ..., Ip−1 are the images in which voxel v is
not occluded. Then, for v, a nonempty set of colors, π, is extracted from the images as shown in Equation 1 where πj is the
set of colors extracted for v from image j, and c0 , c1 , ..., cm are
the extracted color values.
[
p−1
π=
πj = {c0 , c1 , ..., cm }
(1)
j=0
Once this set is extracted, its photoconsistency can be defined in
various ways. Some criteria used in the literature are as follows:
1. Standard deviation (Seitz and Dyer, 1999, Kutulakos and
Seitz, 2000, Culbertson et al., 1999, Broadhurst and Cipolla,
2000),
This measure brings an important advantage over the measure
based on standard deviation: The value of threshold is variable
according to the place of the voxel. If the voxel is on the edge
or textured surface, this situation can be detected with high standard deviation in each image, and a greater threshold can be used.
Adaptive threshold measure is actually superset of the measure
based on standard deviation. The need for 2 thresholds is its main
disadvantage.
3.3
Minkowsky Distance
Photoconsistency of a set can also be defined using Minkowsky
distances, L1 , L2 and L∞ . Minkowsky distance between two
points x and y in <k is given in Equation 5.
Ã
Lp (x, y) =
3. Minkowsky distance (Slabaugh et al., 2001),
4. histogram (Slabaugh et al., 2004),
5. color caching (Chhabra, 2001).
consistent(v) =
Using standard deviation σ as a photoconsistency measure is proposed by Seitz and Dyer (Seitz and Dyer, 1999). If the standard
deviation σ of π is less than a threshold τ , π is photoconsistent,
which means the v is on the surface.
consistent(v) =
σ<τ
otherwise
¾
(2)
3.2 Adaptive Threshold
The consistency measure based on standard deviation works well
when the object’s surface color is homogeneous. Otherwise, it
easily diverges. In order to handle this problem, Slabaugh et
al. (Slabaugh et al., 2004) proposed a new photoconsistency measure called adaptive threshold: If a voxel is on an edge or on a
textured surface, then the variation of the extracted color values
is higher. Larger thresholds should be used so that the photoconsistency measure converges. Assume that a voxel v, which
is on an edge or on a textured surface, is visible from p views,
I0 , I1 , ..., Ip−1 . Then, the color sets extracted from these images
for v are π0 , π1 , ..., πp−1 , and the standard deviations of these
sets are σ0 , σ1 , ..., σp−1 , respectively. These standard deviations
should be high, since v is on an edge or on a textured surface.
The average of these standard deviations, which is given in Equation 3, should also be high. By using this observation, authors
define a new photoconsistency measure called adaptive threshold
as given in Equation 4.
½
consistenti,j (v) =
p−1
1 X
σj
p−1
(3)
j=0
½
consistent(v) =
true,
f alse,
σ < τ1 + στ2
otherwise
(5)
¾
(4)
¾
true,
f alse,
∀i,j , consistenti,j (v)
otherwise
true,
f alse,
∀cl ∈πi ,cm ∈πj , Lp (cl , cm ) < τ
otherwise
(7)
(6)
The most important benefit of using Minkowsky distance as a
photoconsistency measure is the following. During the photoconsistency check, if the voxel is found to be inconsistent, there is no
need to continue to check photoconsistency of that voxel. That
means, having found a pair of colors whose difference is greater
or equal to the threshold, voxel cannot be photoconsistent.
3.4 Histogram
In order to get rid of thresholds, Slabaugh et al (Slabaugh et al.,
2004) proposed a new photoconsistency measure based on color
histogram. Photoconsistency check is performed in two steps:
histogram construction and histogram intersection. In the first
step, visible pixels of the voxel v are extracted and a color a histogram is constructed for each image. Next step is photoconsistency check. To check whether v is photoconsistent or not, all
pairs of histograms of v have to be compared: Two views i and j
of v are photoconsistent with each other, if their histograms Hvi
and Hvj match. A matching function, match(Hvi , Hvj ), which
compares two histograms, and returns a similarity value should
be defined. Then the decision about the photoconsistency v is
made according to the measure given in Equation 8.
½
consistent(v) =
σ=
|xi − yi |
i=0
½
3.1 Standard Deviation
true,
f alse,
! p1
Assume that a voxel v is visible from p views, I0 , I1 , ..., Ip−1 ,
and the color sets extracted from these images are π0 , π1 , ..., πp−1 .
Every color entity in each of these color sets should be in a certain
distance to the color entities of the other sets. Through this idea,
photoconsistency of v is defined as in Equation 6. The distance
between two color sets is given in Equation 7.
2. adaptive threshold (Slabaugh et al., 2004),
½
k
X
true,
f alse,
∀i,j , match(Hvi , Hvj ) 6= 0
otherwise
¾
(8)
The advantage of histogram based photoconsistency measure is
that there is no need for a preset threshold. Furthermore, paired
tests can be very efficient in some circumstances. For instance, if
the voxel is found to be inconsistent for a pair, there is no need to
test other pairs of views for photoconsistency.
¾
3.5
5 EXPERIMENTAL RESULTS
Color Caching
Color caching is a photoconsistency measure proposed by Chhabra
et al. (Chhabra, 2001). It brings a solution to the limitations
caused by Lambertian assumption. Photoconsistency of a voxel
is checked twice before it is removed: If a voxel is found inconsistent in the first step, it is passed to the second step for another check. At the first step, surface parts which show Lambertian reflectance properties are tested. Those surface parts which
fail Lambertian assumptions for some reason (material properties, viewing orientation, position of the light sources, etc.) are
tested at the second step. The irradiance from these parts can
be inconsistent. In order to prevent carving of these parts, before
carving a voxel, it should be checked with another measure which
takes care of viewing orientation. Given an image, for each voxel
v, a cache is constructed. Each cache holds the visible colors of
v from the relevant image. Having constructed color caches for
each image, these caches are checked to find out, if there is a similar or a common color in all pairs of caches. If there is a match
between all pairs of caches, v is labeled as consistent. If there is
any pair of views whose caches do not contain a similar or a common color, v is labeled as inconsistent. Chhabra (Chhabra, 2001)
defines similarity measure between two colors ci = (Ri , Gi , Bi )
and cj = (Rj , Gj , Bj ) as in Equation 9, and similarity of two
images Ii and Ij as in Equation 10.
½
similarity(ci , cj ) =
∆i,j =
true,
f alse,
∆i,j ≤ τ1
otherwise
¾
(a)
(b)
(c)
(d)
(e)
(f)
(9)
p
(Ri − Rj )2 + (Bi − Bj )2 + (Bi − Bj )2
similarity(Ii , Ij ) =
½
true,
f alse,
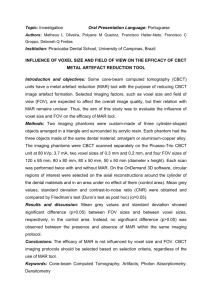
Photoconsistency measures are tested using 3 objects: “cup”,
“star”, and “box”. Voxel space resolution is set to 450×450×450
for all objects. Its handle makes the “cup” object hard to model.
Furthermore, the available texture information is not adequate to
obtain good results. The image sequence consists of 18 images,
16 of which are used for reconstruction and 2 for testing. Reconstructed models are shown in Figure 1 and measured quality of
the reconstruction is tabulated in Table 1 and Table 2. There is
no significant difference between the reconstructed models quantitatively. Qualitative results support this result. Histogram based
photoconsistency measure would be the best choice for this image sequence, since there is no need for threshold tuning in this
approach.
∃cl ∈cachei ∃cm ∈cachej similarity(cl , cm )
otherwise
¾
(10)
So, the photoconsistency of voxel v is defined as in Equation 11.
½
consistent(v) =
true,
f alse,
∀i,j consistent(Ii , Ij )
otherwise
¾
(11)
4 COMPARISON
In order to compare photoconsistency measures, one should be
able to measure quantitatively the quality of the reconstructed
models. In this study, similarity between captured and rendered
images of model is used to obtain a quantitative quality measure.
The images are compared using root-mean-square-error (RMSE)
and normalized cross-correlation-ratio (NCCR). Definitions of
these measures are given in Equations 12 and 13, where M and N
are the image dimensions, and G is the maximum intensity value.
RM SE(A, B) =
1
√
G MN
v
uM,N
uX
t
(Aij − Bij )2
Figure 1: (a) Original image, and artificially rendered images of
“cup” object obtained using (b) standard deviation, (c) histogram,
(d) adaptive threshold, (e) L1 norm, and (f) color caching.
Image No
08
(12)
i,j
17
PM,N
Aij Bij
i,j
N CCR(A, B) = 1 − q P
PM,N 2
M,N
)
( i,j A2ij )( i,j Bij
(13)
Measure
standard deviation
histogram
adaptive threshold
L1 norm
color caching
standard deviation
histogram
adaptive threshold
L1 norm
color caching
N CCR (%)
2.96
2.95
2.95
3.00
2.95
1.68
1.69
1.68
1.86
1.67
RM SE (%)
10.24
10.22
10.22
10.31
10.21
7.99
8.04
8.00
8.43
7.97
Table 1: Error analysis using test images for “cup” object.
Measure
standard deviation
histogram
adaptive threshold
L1 norm
color caching
N CCR (%)
1.55
1.58
1.55
1.63
1.56
RM SE (%)
7.37
7.45
7.37
7.56
7.38
Table 2: Average error for “cup” object.
In order to test the photoconsistency measures on an object with
a simple geometry, “box” object is used. 12 images are taken
around the object and all of them are used during the reconstruction. In Figure 2 the result obtained using L1 norm as photoconsistency measure is illustrated. Measured quality of the reconstruction is tabulated in Table 3. Rather than its quantitative results, the visual quality of the reconstructed model gives a clue. It
is about the success of shape-from-photoconsistency approaches
in general: The finer the voxel space, the better is the reconstruction and the more is the computational complexity.
(a)
(b)
Figure 2: (a) Original image, and (b) artificially rendered image
of “box” object obtained using L1 norm.
Measure
standard deviation
histogram
adaptive threshold
L1 norm
color caching
N CCR (%)
2.15
2.17
2.09
2.15
2.09
RM SE (%)
10.73
10.85
10.57
10.70
10.61
Table 3: Average error for “box” object.
“star” object is a good example of objects that has not texture
information but a complex geometry. The image sequence for
this object consists of 18 images, 9 of which are used for reconstruction and 9 for testing. Reconstructed models are shown in
Figure 3 and measured quality of the reconstruction is tabulated
in Table 4. Adaptive threshold seem to produce a better result
than the others. Selecting low values for the thresholds causes
overcarving. On the other hand, the higher is the threshold, the
coarser is the reconstructed model. There is a high dependency
on selecting proper thresholds for poor-textured objects. There is
no need for a threshold in histogram-based method. However, in
this case, lack of texture information causes some voxels not to
be carved. Uncarved voxels have the color blue, i. e. the background color. Similar effect is also observed when color caching
is used as photoconsistency measure.
6 CONCLUSIONS
A framework for the comparison of photoconsistency measures
used in voxel coloring algorithm is described. Reconstruction
results of 3 objects, which are obtained using generalized voxel
(a)
(b)
(c)
(d)
(e)
(f)
Figure 3: (a) Original image, and artificially rendered images of
“star” object obtained using (b) standard deviation, (c) histogram,
(d) adaptive threshold, (e) L1 norm, and (f) color caching.
Measure
standard deviation
histogram
adaptive threshold
L1 norm
color caching
N CCR (%)
0.85
0.91
0.74
0.85
0.86
RM SE (%)
6.39
6.54
5.89
6.35
6.40
Table 4: Average error for “star” object.
coloring algorithm are discussed. The methods, in which thresholds are used, generally give the best results, if suitable thresholds
are set. Better thresholds can be found empirically. Standard deviation gives appropriate results for the voxels, which are at the
edges on the images or which are projected onto highly-textured
regions of the images. Using adaptive thresholds, the threshold is
changed according to the position of the voxel. But this change
is controlled by another threshold, which is actually the bottleneck of the approach. The second threshold prevents carving
voxels which are at the edge or highly-textured. When the second threshold is not a suitable value, it might generate cusps in
the final model. When objects to be modeled are highly-textured,
it is better to use histogram-based photoconsistency measure. In
this approach, there is no need for a threshold. Minkowsky distance does not have a specific benefit as a photoconsistency measure. However, Minkowsky distance is a monotonically increasing function. So, if the color set is found to be inconsistent from
some views, then there is no need to check the visible pixels from
other views. This speeds the computation up. Color caching is
an appropriate photoconsistency measures to eliminate the highlights. However, it is also possible to eliminate the specularities
using background surface and selected lighting.
REFERENCES
Broadhurst, A. and Cipolla, R., 2000. A statistical consistency
check for the space carving algorithm. In: British Machine Vision
Conference, pp. 282–291.
Chhabra, V., 2001. Reconstructing specular objects with image
based rendering using color caching. Master’s thesis, Worcester
Polytechnic Institute.
Culbertson, W. B., Malzbender, T. and Slabaugh, G. G., 1999.
Generalized voxel coloring.
In: International Conference
on Computer Vision, Vision Algorithms Theory and Practice,
pp. 100–115.
Kutulakos, K. N. and Seitz, S. M., 2000. A theory of shape by
space carving. International Journal of Computer Vision 38(3),
pp. 199–218.
Mülayim, A. Y., Yılmaz, U. and Atalay, V., 2003. Silhouettebased 3d model reconstruction from multiple images. IEEE
Transactions on Systems, Man and Cybernetics Part B: Cybernetics Special Issue on 3-D Image Analysis and Modeling 33(4),
pp. 582–591.
Seitz, S. M. and Dyer, C. R., 1999. Photorealistic scene reconstruction by voxel coloring. International Journal of Computer
Vision 35(2), pp. 157–173.
Slabaugh, G. G., Culbertson, W. B., Malzbender, T. and Schafer,
R. W., 2001. A survey of volumetric scene reconstruction methods from photographs. In: Volume Graphics, pp. 81–100.
Slabaugh, G. G., Culbertson, W. B., Malzbender, T., Stevens,
M. R. and Schafer, R. W., 2004. Methods for volumetric reconstruction of visual scenes. International Journal of Computer
Vision 57(3), pp. 179–199.
Steinbach, E., Girod, B., Eisert, P. and Betz, A., 2000. 3-d
object reconstruction using spatially extended voxels and multihypothesis voxel coloring. In: International Conference on Pattern Recognition, pp. 774–777.