Document 11863994
advertisement

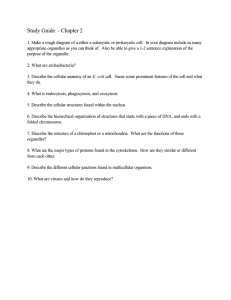
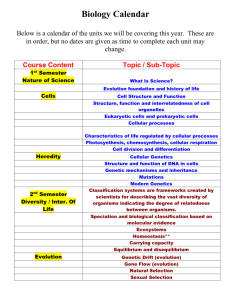
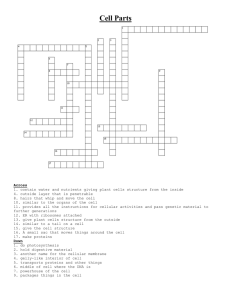
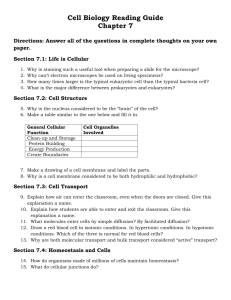
This file was created by scanning the printed publication. Errors identified by the software have been corrected; however, some errors may remain. Modeling Population Dynamics with Cellular Automata Heiko Balzter, Paul Braun and Wolfgang ~ i i h l e r ' Abstract: When predicting changes in plant populations, spatial interactions must be considered. Cellular automata are models incorporating both spatial and temporal dynamics. Vegetation data were sampled on a meadow over three years using the point-quadrat method and population dynamics of three single species were modeled with a cellular automaton using stochastic decision rules. Links with the theory of Markov chains are briefly discussed. INTRODUCTION Ecological science is structured in the three major disciplines autecology, demecology and synecology. While autecology examines the relation between a single organism and its environment, demecology looks at a whole population of organisms and synecology investigates several populations of different species interacting with the environment. In this sense our approach to modeling spatiotemporal population dynamics is an application of statistical methods to a synecological problem. Because there is still a lack of a complete theory of succession (Huston 1994), the need for building vegetation models to simulate changes and patterns becomes obvious. Cellular automata provide a class of spatio-temporal models with a simple basic structure but offer a nearly unlimited range of possibilities. Their value for modeling purposes is discussed, looking at a vegetation study performed at the Agricultural School of Giessen University, Germany, from 1993 till today. CELLULAR AUTOMATA A cellular automaton model consists of N elements, or cells, each capable of several discrete values in a defined state space. The cells can be linked in different ways. In the simplest case they are connected geometrically according to any spatial order, such as in a one- or two-dimensional grid, in which the spatially neighboring cells determine the state of each cell. But the cells may be connected randomly, too, such as in neural networks (Kauffman 1984). Here, only simple, Address: Justus-Liebig-University,Dep. of Biometry and Population Genetics, Ludwigstrasse 27, 0-35390 Giessen, Federal Republic of Germany. Email: gha9Bagrar.uni-giessen.de two-dimensional automata with spatially symmetrical neighborhood links are considered. Neighborhood definitions often used are the Moore-neighborhood consisting of the cell itself and the eight neighboring cells with at least one point in common, and the von Neumann-neighborhood, that only contains the cell itself and the four cells with at least one side in common. Each cell can change its state during discrete time steps t, according to specified decision rules2, which can be either deterministic or stochastic (Czarin & Bartha 1992). For a step towards a theory of cellular automata see Wolfram (1984). Cellular automata have a broad range of applications, for example to model chemical reactions with spatial diffusion, the development of spiral galaxies, for phase transitions, crystal growth, but also quite often to model biological and ecological systems (Wolfram 1983, Molofsky 1994). A literature review concerning ecology is given by Phipps (1992). Looking exclusively at the modeling approaches to ecological systems one furthermore must emphasize the following publications. Flamm & Turner (1994) modeled land cover with a stochastic cellular automaton integrating several data layers and thus increasing precision of the model output. In vegetation science, Ratz (1994) made forecasts of the development of spatial structures of boreal forests underlying the influence of fire. The effect of fire on Banksia populations in Australia was also examined (Marsula & Ratz 1994). On a small scale, Winkler et al. (1994) modeled the dynamics of a dry grassland community, observing a plot sized one square meter. A very important study was performed by Silvertown et al. 1992, who modeled population dynamics of five grass species, paying special attention to competition. They extended the Markovian property to a cellular automaton model and obtained results that a non-spatial model would not have been able to explain. A study of the impacts of a coal-fired power plant to freshwater wetland in Wisconsin was carried out by Ellison & Bedford (1995) with a quite sophisticated model. Using rank data the model output agreed well with the observed changes caused by hydrological impact. A major problem of cellular automata models is to formulate adequate decision rules determining the state transitions of the cells. A good solution to this is presented in Wiegand et al. (1994), who modeled five plant species of a semi-arid shrub ecosystem in South Africa, translating biological and ecological knowledge into decision rules depending on weather conditions. Their major problem was the time scale of the model, as approximately every ten years the seemingly stable vegetation abruptly changed, following a certain weather event. However, it is possible to successively improve the decision rules by the "top-down approach" as described by Kummer et al. (1994). Modeling the spread of rabies they started with a simple, one-dimensional basic model and scaled down in the investigation of the system by expanding the model spatially to two dimensions with time steps of one year, and then temporally to finer time steps of two months. Their experiences were satisfying, for it was possible this way to gain heuristic insights in the dynamics of the rabies-fox-system. sometimes called "transition rules" or simply "rules" 704 In a detailed discussion of cellular automata and ecological theory, Phipps (1992) comes to the conclusion that, as far as application to natural systems is concerned, probabilistic decision rules usually have a better analogy to the system than deterministic ones, though sometimes their heuristic value is less. Kareiva & Wennergren (1995) pointed out that a strength of this class of models is that it is capable of modeling ecosystems with respect to spatial segregation, which often is a condition for coexistence of predator and prey populations. Possibly cellular automata can contribute ideas to solving the problem of competition and coexistence of plant species (Grace 1995). MATERIAL AND METHODS The meadow is located in Giessen, Germany. It is regularly mown about ten times a year apart from an area in its centre. The mown plant community was classified as loliocynosure tum following from the phytosociological system of Braun-Blanquet (1964), whereas the unrnown plant community had a quite different composition. For reason of simplicity this difference in use was ignored in our model. The survey method used was the point-quadrat Figure 1.- Point-quadrat method. An extensive statistical study of pointframe as described by Kreeb quadrat methods was performed by Goodall (1983) and used in this study. (1952). The frame used in this study holds three pins above the vegetation, and during sampling each pin passes through a guide channel down to the ground and the number of contacts of the pins to each plant species is counted (figure 1). In this manner a grid of 10 parallel transects, each consisting of 12 frame positions was sampled, resulting in 120 subplots. Methodological issues are discussed elsewhere (Balzter et al. 1995). Data sets for Lolium perenne (perenniel ryegrass), Trifolium repens (white clover) and Glechoma hederacea (ground ivy) from May 1993, June 1994 and June 1995 were used. The 120 subplots on the meadow are used as the cells of the two-dimensional cellular automaton. When looking at a certain plant species, it can either be absent (=O) or present (=I) in each cell, resulting in a dualistic, discrete state space. First, the transitions from 1993 to 1994 and from 1994 to 1995 were pooled. In order to set adequate decision rules, two different approaches to stochastic probability estimation were then carried out: 1) Under the assumption that only the state of the cell itself at the preceding time step determines its actual state, a matrix of transition probabilities (transition matrix) as known from the theory of Markov chains was estimated from the data. ' Thus, the ,,neighborhood" incorporates only the subplot itself. We will refer to this approach as ,,spatial Markov chaincc. 2) Assuming an influence of the spatially neighboring subplots on the subplot itself, the Moore-neighborhood (the cell itself and the eight neighboring cells) was used in the second set of decision rules. Transitions from any possible neighborhood into one of the two states must be considered. Because this would result in 36 different neighborhood states, they were classified, so that the transition matrix is stochastic3.Obviously this classification has to be changed for frequent and rare species (table 1). In the following text this approach is called ,,Mooreneighborhood". Table 1.- Neighborhood classifications. Numbers mean neighboring cells with species present. Percentage cover was smallest for Glechoma hederacea ,followed by Lolium perenne and finally Trifolium repens. neighborhood class Lolium perenne Trifolium repens Glechoma hederacea Once the transition matrix was estimated, the distributions of cells with absence or presence of the species at several time steps were predicted. During each time step every cell randomly took a new state depending on the corresponding probability distribution of the transition matrix. RESULTS The transition matrices for the spatial Markov chain estimated from the vegetation data are given in table 2. Table 2.- Transition matrices for the s ~ a t i aMarkov l chain and three ~ l a n s~ecies. t Lolium perenne Trifolium repens Glechoma hederacea from to 0 1 0 1 0 1 0 (absent) I (present) (::: :1"3 (:: ::::) 0.92 0.08 (062 0.3 8) For the Moore-neighborhood the matrices (table 3) must not be confused with the transition matrices of Markov processes, because the neighborhood state space is not the same as the cell state space, expressed in the different numbers of rows A matrix is called ,,stochastic ", I f i) all row sums equal one, ii) no element is less than zero or greater than one and iii) at least one element in each column differsfiom zero. and columns of the matrices. Because of this property is it far fiom easy to interpret the matrices in the way we do with the spatial Markov chain. Table 3.- Transition matrices for the Moore-neighborhood using five neighborhood classes for the three plant species. Lolium perenne Trifolium repens Glechoma hederacea fiom neighborhood class to 0 1 0 1 0 1 Figure 2 shows the dynamics of Lolium perenne. The relative frequency of cells with the species present quickly reaches a limiting distribution and the following variation is caused by the limitation of the number of cells. If an infinite number of objects were to pass the Markov chain, the limiting distribution would be stable. Interested in the value of the limiting distribution we can calculate a first estimate from the last 20 time steps t = 8 1,82,...,100. For Lolium perenne this results in xLp = 0.50. For Trifolium repens the predicted frequencies show similar results, but stabilize on a higher level (F, = 0.67, figure 3) and Glechoma hederacea tends = 0.12 (figure 4). against The theory of Markov chains allows us to calculate the limiting distributions, assuming that every subplot is changing its state according to the Markovian transition matrix. Because all three transition matrices of the colonized by Lolium perenne over 100 time Markov chains are aperiodic classes of steps (mean of 10 simulation runs) positively recurrent states and the state predicted by the spatial Markov chain. space is finite, the limiting distributions x:time; Y: relative frequencyp ( m ) are ergodic and can be determined &y eq. 1 (Heller et al. 1978). Note, that the ergodic property means, that the limiting distribution is independent of the initial distribution. In other words, the plant population reaches the same equilibrium, wherever it starts. The results (table 4) agree to the rough estimates from the data. p(m) = lim P' - t+oo 707 9 Figure 3.- Relative frequency of cells colonized by Trifolium repens over 100 time steps (mean of 10 simulation runs) predicted by the spatial Markov chain. x:time; y: relative frequency. Figure 4.- Relative frequency of cells colonized by Glechoma hederacea over 100 time steps (mean of 10 simulation runs) predicted by the spatial Markov chain. x: time; y: relative frequency. Table 4.- Ergodic distributions of the spatial Markov processes Lolium perenne Trifolium repens Glechoma hederacea 0 (absent) 1 (present) 0 (absent) 1 (present) 0 (absent) 1 (present) 0.33 0.67 0.89 0.1 1 0.50 0.50 - state: rel. fieq.: -- - -- Using the second set of decision rules, under the assumption of the Mooreneighborhood determining the future state of a cell, the model still shows asymptotical behavior. Figure 5(a) shows the results for Lolium perenne. Surprisingly they do not differ from those of the spatial Markov chain, as the estimated limiting distribution xLp = 0.50 is the same. To examine the model behavior two further approaches were made. First the transition matrix was applied to various initial distributions. All initial distributions tended to vary randomly around the same mean after a specific number of time steps. Secondly, the cell grid of the cellular automaton was expanded to 100 .lo0 = 10000 cells. (4 (b) Figure 5.- Relative frequency of cells colonized by Loljumperenne over 100 time steps as predicted by the cellular automaton using the Moore-neighborhood. x:time; y: relative frequency. (a) mean of 10 simulation runs; (b) one simulation run, 100x100 cells. As expected the variation was decreased strongly by this expansion (figure 5(b)), while the mean of the limiting distribution is shown more clearly than using 120 cells. Looking at Trifolium repens the results are similar (figure 6), but setting the complete initial distribution to zero no plant can ever establish itself. The reason for this is the transition matrix (table 3), where a neighborhood of all zero produces a cell in state zero with probability poo = 1. The limiting distribution of Trifolium repens is thus dependent on the initial distribution. Neglecting this special case, because for practical purposes it is very unlikely that no single plant of Trifolium repens would be found on the meadow, the estimated limiting distribution is ZTr = 0.72 differing slightly from the forecast of the spatial Markov chain. Figure 6.- Relative frequency of cells colonized by Trgoliurn repens over 100 time steps predicted by the cellular automaton using the Moore-neighborhood. x:time; y: relative frequency. (a) mean of 10 simulation runs; (b) one simulation run, 100x100 cells A completely different result is obtained for Glechoma hederacea in figure 7. Although the model behavior is still the same as for the other species, the value of the limiting distribution IT,, = 0.66 is much greater than that given by the spatial Markov chain. Which model comes closer to reality can hardly be judged, but will be subject to further validation in the following years. Because Glechoma hederacea does not typically cover two thirds of an area the spatial Markov chain is expected to be more reliable, but this is only supposition. The importance of selecting appropriate decision rules based on the right neighborhood definition can be seen in this example. If the neighboring subplots do not have a major impact on the species in the subplot, the Moore-neighborhood will be the wrong modeling approach and a spatial Markov chain will be preferred. But, if the species is able to colonize adjacent subplots by stolons or seed dispersal, the Moore-neighborhood is likely to be preferable. Using stochastic decision rules whose probabilities are estimated from the data has the major advantage that the system behavior can be modeled without knowing exactly quantitative relationships between certain factors (which also would result in a quite complicated deterministic model). The effects of all major factors influencing the development of the population add up to a stochastic probability density function that can easily be determined. Figure 7.- Relative frequency of cells colonized by Glechoma hederacea over 100 time steps predicted by the cellular automaton using the Moore-neighborhood. x:time; y: relative frequency. (a) mean of 10 simulation runs; (b) one simulation run, 100x100 cells DISCUSSION The theory of cellular automata has not yet been satisfactorily investigated. Despite the underlying simplicity of this class of models, cellular automata exhibit numerous different behaviors. The most important work was done by Wolfram (1984), but there is still a need for mathematical examinations. In our study the model behavior can be explained partly using the theory of Markov chains. In addition, the proved existence of a limiting distribution is important for the assumptions of vegetation science. A limiting distribution is equivalent to the concept of a climax of succession as proposed by Clements (1916). Whether there is a climax of the observed vegetation changes or not shall not be discussed in detail, because various conditions necessary for the maintenance of the successional path are likely to change before this question arises, e.g. the size of the rabbit population. These changing conditions erect limits for the predictions of the cellular automaton model. 100 time steps are surely too many to interpret in a serious way, this number was simply selected to examine the long-term model behavior. But the model output described above probably gives a rough impression of the expected development of cover and random variation of the plant species. The two cellular automata presented here show differences in model output for two of the three species. Because the only thing that was changed was the definition of the stochastic decision rules, the differences in model output must be due to assumed spatial interactions between adjacent subplots. The way in which cells are connected thus plays an important role. Furthermore, the decision rules used here are very simple: They cover only one single species and do not contain information about biological conditions of the species, such as mean length of stolons or distance of seed dispersal, which were included in the studies of Wiegand et al. (1994) and Ellison & Bedford (1995). In fact, it is intended to improve successively the decision rules of our model following the top-down approach of Kummer et al. (1994) by using vegetation data of four time steps per year, information about the seed bank in the soil, wind dispersal and interactions between species (the latter was done for two species by Balzter et al. 1996). However, a practical advantage of strongly simplified decision rules in the model is that data sampling is not as laborious as if a lot of factors had to be measured. This feature is even more important, if the difficulty of sampling spatial data is considered. This may be one reason, why over a long time only a few scientists have applied spatial data analyses to their problems, although in the meantime the importance of both spatial and temporal structures and dynamics are generally recognized. In the hture more spatial data will be usable, because Geographic Information Systems (GIs) and large data bases are becoming more and more established. Linking cellular automata with raster-based GIs seems to be a promising approach. The great fieedom in setting up decision rules allows the adaptation of a wide range of knowledge to the model and prediction of the expected development under the condition that the assumptions made in the model are true. This variety of possibilities might promote the use of cellular automata in future ecology. REFERENCES Balzter, H. , Braun, P. & Kohler, W. 1995. Detection of Spatial Discontinuities in Vegetation Data by a Moving Window Algorithm. In: Gaul, W. & Pfeifer, D. (Eds.): From Data to Knowledge: Theoretical and Practical Aspects of Classification, Data Analysis and Knowledge Organization. Springer, Berlin, 243-252. Balzter, H., Braun, P.W. & Kohler, W. 1996 (in press). Ein zellulares Automatenmodell zur Simulation der Vegetationsdynamik einer WeidelgrasWeinklee-Weide. Tagungsberichte der AG 0kologie der Biometrischen Gesellschaft, Freiburg & Leipzig. Braun-Blanquet, J. 1964. Pflanzensoziologie. Springer, Wien & New York. Clements, F .E. 1916. Plant Succession. Carnegie Institute of Washington Publication 242,1-5 12. Czaran, T. & Bartha, S. 1992. Spatiotemporal Dynamic Models of Plant Populations and Communities. Trends in Ecology and Evolution 7:2,38-42. Ellison, A.M. & Bedford, B.L. 1995. Response of a Vascular Plant Community to Disturbance: A Simulation Study. Ecological Applications 5: 1, 109-123. Flamm, R.O. & Turner, M.G. 1994. Alternative Model Formulations for a Stochastic Simulation of Landscape Change. Landscape Ecology 9: 1, 37-46. Goodall, D.W. 1952. Some Considerations in the Use of Point Quadrats for the Analysis of Vegetation. Australian Journal of Scientijk Research, B 5, 1-41. Grace, J.B. 1995. In Search of the Holy Grail: Explanations for the Coexistence of Plant Species. Trends in Ecology and Evolution 10:7,263-264. Heller, W.D., Lindenberg, H., Nuske, M. & Schriever, K.-H. 1978. Stochastische Systeme. De Gruyter, Berlin. Huston, M.A. 1994. Biological Diversity. The Coexistence of Species in Changing Landscapes. University Press, Cambridge. Kareiva, P. & Wennergren, U. 1995. Connecting Landscape Patterns to Ecosystem and Population Processes. Nature 373,299-3 02. Kauffman, S.A. 1984. Emergent Properties in Random Complex Automata. In: Farmer, D., Toffoli, T. & Wolfram, S. (Eds.): Cellular Automata. Proceedings of an Interdisciplinary Workshop, Los Alamos, New Mexiko. North-Holland Physics Publishing, Amsterdam, 145-156. Kummer, G., Jeltsch, F., Brandl, R. & Grimm, V. 1994. Kopplung von Prozessen auf lokaler und regionaler Skala bei der Tollwutausbreitung: Ergebnisse eines neuen Modellansatzes. Verhandlungen der Gesellschaft f i r Okologie 23, 355364. Kreeb, K.H. 1983. Vegetationskunde. Ulmer, Stuttgart. Marsula, R. & Ratz, A. 1994. Einfld von Feuer auf die Populationsdynamik von serotinen Pflanzen - ein Modell. Verhandlungen der Gesellschaft fiir 0kologie 23,365-372. Molofsky, J. 1994. Population Dynamics and Pattern Formation in Theoretical Populations. Ecology 75 :1, 30-39. Phipps, M.J. 1992. From Local to Global: The Lesson of Cellular Automata. In: DeAngelis, D.L. & Gross. L.J. (Eds.): Individual-based Models and Approaches in Ecology. Populations, Communities and Ecosystems. Chapman & Hall, New York, 165-187. Ratz, A. 1994. Modellierung feuererzeugter raumlicher Strukturen in borealen Waldern. Verhandlungen der Gesellschaft f i r Okologie 23, 373-38 1. Silvertown, J., Holtier, S., Johnson, J. & Dale, P. 1992. Cellular Automaton Models of Interspecific Competetion for Space - The Effect of Pattern on Process. Joumal of Ecology 80,527-534. Wiegand, T., Milton, S.J. & Wissel, C. 1994. Ein raumliches Simulationsmodell f i r eine Pflanzengemeinschaft in der siidlichen Karoo, Siidafrika. Verhandlungen der Gesellschaft f i r Okologie 23,407-4 16. Winkler, E., Klotz, S. & Wissel, C. 1994. Mathematische Modellierung der Phytozonosedynamik eines Trockenrasens. Verhandlungen der Gesellschaft f i r Okologie 23,45 1 - 6 8 . Wolfram, S. 1983. Statistical Mechanics of Cellular Automata. Reviews of Modem Physics 55:3,601-644. Wolfram, S. 1984. Universality and Complexity in Cellular Automata. Physica D 10, 1-35.