Author(s) Stuffle, L. Douglas. Title Bathymetry from hyperspectral imagery.
advertisement
 Stuffle, L. Douglas. Title Bathymetry from hyperspectral imagery.")
Author(s)
Stuffle, L. Douglas.
Title
Bathymetry from hyperspectral imagery.
Publisher
Monterey, California. Naval Postgraduate School
Issue Date
1996
URL
http://hdl.handle.net/10945/30987
This document was downloaded on May 04, 2015 at 22:48:14
DUDLr
NAVAL t
.
,
>!<
MONTEREY CA
-»Y
'i'S
SCHOOL
-5-5101
NAVAL POSTGRADUATE SCHOOL
MONTEREY, CALIFORNIA
THESIS
BATHYMETRY FROM HYPERSPECTRAL IMAGRY
by
L.
Douglas Stuffle
December, 1996
Thesis Advisor:
Co- Advisor:
Approved
R. C. Olsen
Newell Garfield
for public release; distribution
is
unlimited.
Form Approved
REPORT DOCUMENTATION PAGE
Public reporting burden for (his collection of information
is
estimated to average
1
Jefferson Davis
Highway, Suite 1204, Arlington,
VA
22202-4302, and
comments regarding
Washington Headquarters Services, Directorate
to the
No 0704-0188
hour per response, including the time for reviewing instruction, searching existing data sources
gathering and maintaining the data needed, and completing and reviewing the collection of information Send
collection of information, including suggestions for reducing this burden, to
OMB
this
burden estimate or any other aspect of
for Information Operations
this
and Reports, 1215
Office of Management and Budget, Paperwork Reduction Project (0704-0188) Washington
DC
20503
1
.
AGENCY USE ONLY
REPORT DATE
(Leave blank)
3.
December, 1996.
REPORT TYPE AND DATES COVERED
Master's Thesis
BATHYMETRY FROM HYPERSPECTRAL IMAGRY
FUNDING NUMBERS
AUTHOR(S)
L.
7.
Douglas
Stuffle.
PERFORMING ORGANIZATION NAME(S) AND ADDRESS(ES)
PERFORMING
ORGANIZATION
REPORT NUMBER
Naval Postgraduate School
Monterey
CA 93943-5000
9.
SPONSORING/MONITORING AGENCY NAME(S) AND ADDRESS(ES)
11.
SUPPLEMENTARY NOTES The
views expressed
official policy or position of the
12a.
13.
those of the author and do not reflect the
Department of Defense or the U.S. Government.
DISTRIBUTION/AVAILABILITY STATEMENT
Approved for public release; distribution is unlimited.
ABSTRACT (maximum 200 words)
This work used hyperspectral imagery
classify substrates
this
in this thesis are
work.
DISTRIBUTION CODE
12b.
A
to derive shallow water depth estimates.
and estimate reflectance values
for the substrate types
is
technique to
the major contributions of
This was accomplished by masking different bottom types based on spectra, effects that
were not included
The high
SPONSORING/MONITORING
AGENCY REPORT NUMBER
10.
in
previous methods.
altitude of the lake provided a
relatively straight
environment.
HYDICE
data
22, 1995.
low aerosol content within the atmosphere. This allowed for
forward atmospheric corrections.
The atmospheric
was taken over Lake Tahoe on June
radiative
This was substantially easier than in an oceanic
transfer code
MODTRAN3.0
was used
to
model the
at the time of the experiment. The radiative transfer code HYDROLIGHT3.5
was used to model the attenuation coefficients of the relatively clear water of the lake. Minimal river
input and low chlorophyll concentrations made it simpler to determine these values. Making use of the
full spectral content of data within the optical range, multiple substrates were differentiated and
masked off. This allowed for an estimation on wet substrate reflectance and a straight forward
calculation of bottom depth.
atmospheric conditions
14.
subject terms: Hyperspectral, Visible, Imagery, Bathymetry,
HYDICE,
15.
PAGES
MODTRAN3.5, HYDROLIGHT3.0,
17.
NSN
SECURITY CLASSIFICATION OF REPORT
SECURITY CLASSIFICATION OF THIS PAGE
Unclassified
Unclassified
7540-01-280-5500
NUMBER OF
19.
SECURITY CLASSIFICATION OF ABSTRACT
87
16.
PRICE CODE
20.
LIMITATION OF
ABSTRACT
UL
Unclassified
Standard
Form 298
Prescribed by
ANSI
Std.
(Rev. 2-89)
239-18 298-102
Approved
for public release; distribution
is
unlimited.
BATHYMETRY FROM HYPERSPECTRAL IMAGRY
L.
Douglas Stuffle
Lieutenant, United States
B.
S.,
Navy
University of Arizona, 1990
Submitted
in partial fulfillment
of the requirements for the degree of
MASTER OF SCIENCE IN PHYSICS
from the
NAVAL POSTGRADUATE SCHOOL
December, 1996
™
LIBRARY
3RADUATE SCHOOL
•
,
Mowt« CA
MONTERcY
93943-5101
ABSTRACT
This work used hyperspectral imagery to derive shallow water depth estimates.
technique to classify substrates and estimate reflectance values for the substrate types
the major contributions of this work.
bottom types based on
HYDICE
data
spectra, effects that
were not included
was taken over Lake Tahoe on June
22, 1995.
environment. The atmospheric radiative transfer code
HYDROLIGHT3.5 was
water of the lake.
at
The high
previous methods.
altitude of the lake
This allowed for relatively
The
in
an oceanic
was used
to
model
radiative transfer code
used to model the attenuation coefficients of the relatively clear
Minimal
river input
the optical range, multiple substrates
for an estimation
MODTRAN3.0
the time of the experiment.
and low chlorophyll concentrations made
simpler to determine these values. Making use of the
depth.
in
forward atmospheric corrections. This was substantially easier than
the atmospheric conditions
is
This was accomplished by masking different
provided a low aerosol content within the atmosphere.
straight
A
were
full spectral
differentiated
on wet substrate reflectance and a
content of data within
and masked
straight
it
off.
This allowed
forward calculation of bottom
VI
1
.
TABLE OF CONTENTS
I.
INTRODUCTION
1
BATHYMETRY
3
II.
WEIGHTED LINE SOUNDINGS
B. SONAR SOUNDINGS
C. DEPTH MEASUREMENTS WITH LIDAR
D. ALTIMETER DEPTH MEASUREMENTS
E. PASSIVE OPTICAL METHODS
A.
III.
3
5
6
7
9
Remote Sensing
1.
Satellite Spectral
2.
Airborne Spectral Remote Sensing
1
3.
Recent Developments
13
OPTICAL MEASUREMENTS
15
A.
B.
9
GEOMETRICAL RADIOMETRY
15
1.
Radiance
15
2.
Irradiance
16
3.
Reflectance
16
4.
Radiance Invariance
17
LIGHT
1.
AND HOW IT INTERACTS WITH WATER
Inherent Optical Properties
18
19
a.
Spectral Absorptance
b.
Spectral Scatterance
20
20
c.
Spectral Transmittance
21
d.
Other Significant Quantities
21
2.
Water Constituents
22
3.
Summing
23
4.
Absorption
5.
the Different Inherent Optical Properties
in
Water
23
Pure Water
a.
Absorption
b.
Absorption Due to Dissolved Organic Matter
c.
Absorption Due to Phytoplankton and Organic Detritus
in
From Sediment
d.
Contributions
e.
Deriving a Model for Total Absorption
Scattering in
Water
24
26
26
27
27
28
C.
RADIATIVE TRANSFER
Water
31
D.
BATHYMETRY FROM REMOTELY SENSED RADIATION
32
1.
1
Radiative Transfer
Unmixing
Algorithm
2.
-
Effects
An
at
the
Due
29
Depth and Substrate Reflectance - The Bierwirth
LANDSAT Data
Hamilton Algorithm - An Application of AVIRIS Data
to
Exploitation of
Empirical Model
-
VII
32
35
.
IV.
MEASUREMENTS AT LAKE TAHOE
A. MEASUREMENTS AT LAKE TAHOE
B.
V.
MODEL APPLICATION
39
Atmospheric Contributions
a.
Normalizing
47
Sky Radiance
c.
Convolving Modtran3.5 Data
e.
3.
Water Leaving Radiance
42
43
43
44
46
Path Radiance
b.
d.
VI.
37
APPLICATION OF THE BIERWIRTH METHOD TO LAKE TAHOE DATA..40
1. Processed HYDICE Data
40
2.
B.
37
INSTRUMENTS
INITIAL
A.
37
to
Match
HYDICE
to Reflectance
Depth Derivation
48
a.
HYDROLIGHT,
b.
Results of Bierwirth
a Radiative Transfer Model
APPLICATION OF THE HAMILTON METHOD TO LAKE TAHOE DATA. ..51
DERIVING DEPTH WITH MODELED BOTTOM TYPES
A.
MASK CONSTRUCTION
1
2.
3.
B.
49
50
Mask
53
Sandy Bottom Areas
Constructing Masks for Dark Areas
Composite of the Bottom Types
Constructing
for
MODELING DEPTH BY INCLUDING SUBSTRATE REFLECTANCE
1.
53
56
58
59
60
Estimating Substrate Reflectance
61
Rock Substrate
Sandy Substrate
Wet Substrate Reflectance
61
a.
b.
c.
62
63
64
Depth Results
a. Depth by Using Bottom Reflectance Compared to Depth Without Using
64
Bottom Reflectance
Entire
Scene
65
b. Using Substrate Reflectance to Calculate Depth for
66
C. RELIABILITY OF ATTENUATION COEFFICIENTS
2.
VII.
SUMMARY AND CONCLUSIONS
LIST OF
69
REFERENCES
73
INITIAL DISTRIBUTION LIST
77
Vlll
INTRODUCTION
I.
A
basic military need in
bathymetry. This knowledge
is
warfare
littoral
an accurate knowledge of near-shore
is
necessary for special forces and other combatants prior to
landing activities, and for marine forces traversing the coastal zone.
information
is,
of course, just one element of the intelligence information needed to plan
a landing, with other elements including a
defenses,
Such "metoc"
knowledge of beach
trafficability,
and shore
The work described here addresses how
including mines and obstacles.
bathymetric information can be obtained from (visible) spectral imagery.
Due
to
the
complex and constantly varying nature of
electromagnetic radiation with water,
a relatively benign environment.
model
situation,
Once
one can then begin
near-coastal regions of the ocean.
HYDICE
it's
over Lake Tahoe on June 5
to
best to begin the analysis of a
satisfactory results
,
new
technique
of
in
have been obtained for the
understand the interaction within the tumultuous
Measurement taken with
th
interaction
the
the hyperspectral imager
1995 provided an ideal basis
to
begin determining
depth from hyperspectral data.
As with any measurement of spectral imagery,
be unmixed with the noise inherent within the
For the case of measurements over water,
the data received at the sensor
medium through which
this
it
must
has traversed.
noise will include effects due to the
atmosphere as well as the water column, both of which are extremely dynamic, changing
with time and geographical position.
that has
sufficient
model
MODTRAN3.0
is
a proven radiative transfer
been developed over the past two decades and
model
for the
HYDROLIGHT,
Lake Tahoe atmosphere.
will be
In addition,
shown
to
model
provide a
the radiative transfer
developed by Curtis Mobley, will be used
to
determine the
behavior of the water, or specifically, the wavelength dependent attenuation coefficients.
This thesis will take previous depth derivation algorithms and build on them to
take advantage of the wealth of information available through hyperspectral imagery.
will
It
conclude by presenting a relatively accurate depth contour of a portion of Lake Tahoe
called Secret Harbor.
It
will begin with a brief presentation of the history of
1
bathymetry
measurements
in
Chapter
II
followed by a discussion of the basic principles needed to
understand radiative transfer and
IV
how
light interacts
will then describe the conditions of the
how
those measurements were taken.
previous algorithms
Chapter VI, of
data as
results
it
how
is
presented
in
with water in Chapter HI.
Chapter
Lake near the time of the measurements and
Initial
observation, analysis and comparison to
Chapter V, followed by a complete discussion,
in
to take advantage of the information content within the hyperspectral
applies to the algorithm.
Finally,
Chapter VII will present a discussion of the
and conclusions drawn from the modeling technique used throughout the
thesis.
.
BATHYMETRY
II.
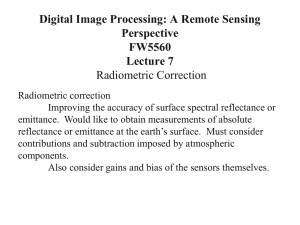
The mapping of
the Earth's oceans dates back to ancient
maps were constructed with
Figure
2.
chisel
Babylon and times when
and rock instead of paper and pencil, or computer,
1
Figure
map
2.
1
Ancient Babylonian
.
depicting Babylon surrounded
by ocean. Gaskell (1964).
map
Figure 2.1 shows an ancient Babylonian
somewhat
as a castle
is
surrounded by a moat.
based on facts they could observe
like
them bravely and cautiously
were
A.
like,
that depicts
at the
time.
set out to
This
It
Babylon surrounded by water,
map and
those similar to
it
were
wasn't until Greek mariners and others
sea that these ancient ideas on what the oceans
began to be disproved.
WEIGHTED LINE SOUNDINGS
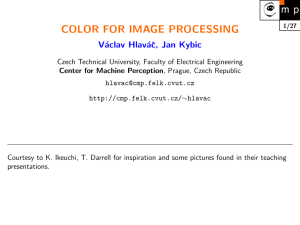
One
of the
first scientific
ways
in
which
early mariners could
of the ocean depth was with a weighted line, Figure 2.2.
3
make measurements
Figure 2.2. Depiction of early sounding
measurements. Gaskell (1964)
This was an arduous and time consuming method.
information
at best,
vessel.
coastal regions.
much
often resulted in mediocre depth
but until recent times was the only method in use.
Depth measurements
measuring
It
are limited to
In ancient times this
As
how much
meant
that
line
measurements were limited
capabilities of the vessels grew, deeper
larger area of the ocean were possible.
quality of the information produced
how
to near
measurements spanning a
As with any measuring instrument,
a function of the instrument's resolution.
is
case of sounding measurements the resolution
quantity of the measurements,
can be tethered from the
is,
among
far apart they
are
the
In the
other things, dependent on the
made and
the
ability
of the
measuring vessel to establish an accurate geographical position. In very deep water, as
normally the case
the
in the
sounding dredge.
measurements while
however
to
the
open ocean,
it
This makes
sometimes takes several hours
it
very difficult to take
also maintaining an
crew of the
British
accurate position.
ship H.M.S. Challenger.
to
many
is
lower and raise
closely
spaced
Credit must be given,
Over the course of
Challenger's three-year expedition, the crew
providing the
first
H.M.S. Challenger
look
is
at
made
a total of over
the relative transoceanic depth.
depicted
in
two hundred soundings
The course taken by
the
Figure 2.3 to provide the reader an idea of the scope of
the effort put forth by her crew.
Figure 2.3. Route taken by the H.M.S. Challenger during
expedition to
It is
make
B.
three year
transoceanic oceanographic measurements. Gaskell (1964).
interesting to note that in very near coastal water
pole than a weighted
it's
it is
more accurate
to use a
sounding
line.
SONAR SOUNDINGS
With
the advent of sonar the
could be made
in
same measurements
a matter of seconds.
The speed of
the
that
used to take several hours
measurements allows
higher frequency of measurement along the ship's path and therefore a
bottom resolution as shown
in
Figure 2.4.
for a
much
much
better
Figure 2.4. Comparison of soundings taken with weighted line (on the
soundings taken with sonar (on the
Figure 2.4
is
same area of
a
comparison of weighted
the South Atlantic
soundings were
made
Ocean
line
and
Gaskell (1964).
soundings and sonar soundings made of the
floor.
As Gaskell (1964)
points out, only 13
with the weighted line as compared to the 1300 soundings
with sonar, resulting in a
C.
right).
left)
much more
made
detailed profile.
DEPTH MEASUREMENTS WITH LIDAR
Just as sonar measures depth using acoustics, a Light Detection
(LIDAR) system use electromagnetic
makes use of
radiation to
measure return time.
and Ranging
LJDAR
the different properties of air and water to determine the depth.
by sending a very short
laser pulse
downward from
energy are reflected off the ocean surface and part
an airborne platform.
is
It
however,
operates
Portions of the
reflected off of the sea bed.
The
nature of the interaction between electromagnetic radiation and water will be discussed in
more
detail later in this paper.
Given a reasonably
distinct
bottom
return, the depth
can
be calculated by taking the difference between the return times of the surface and bottom
reflections.
.'*
H
HHIV
*'
1
1
M
15'
IS H 2(T
H H !f
A
,.,.
1
\
A
1
\
1
;
\
1
'/'
If
1
OPTICAL SURVEY
ACOUSTIC SURVEY
LIDAR measurements
Figure 2.5.
and
Acoustical measurements, Cassidy (1995)
As
reported in Cassidy (1995), Figure 2.5 displays the results from a test of a French
system,
which shows a comparable accuracy between acoustic and
Cassidy argues that a
LIDAR
has an advantage over acoustical methods in that
allows low cost surveys of difficult to reach or spread out coastal areas.
inherent navigational difficulties associated with coastal
However,
it
must be kept
in
optical
mind
that as light travels
results.
it
is fast,
In addition, the
sonar surveys are avoided.
through both
air
and water,
it
experiences propagation losses that will be discussed in later chapters. This effect in fact
places limitations on where and
D.
how
a
LIDAR
system can be used.
ALTIMETER DEPTH MEASUREMENTS
Satellite
based altimeters are capable of making depth measurements on a
wider scale than either sonar or
measurements are the
LIDAR
as can be seen in Figure 2.6.
result of 4.5 years of
and 2 years of European Remote Sensing
U.
S.
Satellite
Navy Geosat
altimeter
much
These depth
measurements
(ERS-1) altimeter measurements.
In
Figure 2.6 green areas have essentially normal depth, areas with yellow-orange-red hues
are relatively shallower
and areas with blue-violet-magenta are increasingly deeper.
t
30°E
60°E
90°E
120°E
180"
150°E
150°W
120°W
90°W
60"W
30"W
0°
I
60° N
60'N
A
.*c>i
y
1
1
f-'N^J-*^
''•
'•»
V
''
'
'
:.
30° N
30°N
0"
°"l
I'-'
"
.-J
30°S
30°s'
]
]
"".y
60°Sj
60°S
1
0°
30°E
60°E
90°E
120°E
150°E
180°
150°W
120°W
90"W
60°W
30°W
0°
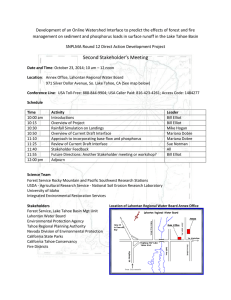
Figure 2.6. Depth derivation, on a continental scale, from
altimeter measurement.
As
reported by
NASA
From Sandwell
et al.
(1995).
(1986), the sea surface has bulges that result from the variation in
gravity in different regions of the ocean, Figure 2.7.
Figure 2.7.
Gravitational effects on ocean
surface from altimeter measurements.
From Sandwell
et al. (1995).
8
As depicted
in
Figure 2.7, such features as mid-oceanic ridges have a high concentration
of mass and therefore will have a greater gravitational pull, causing a "pile up" of water
above them. This accumulation of water can
result in a rise of the sea surface as
much
as
Contrary, areas were trenches exist will have less of a gravitational pull and
5 meters.
subsequently cause a depression of the sea surface, sometimes as
These variations
in
the
electromagnetic radiation,
sea surface can
much
then be measured
would measure depth
as a sonar
much
60 meters.
as
by an altimeter, using
via acoustics.
Altimeter measurements have given scientist an excellent view of the large scale
However with
depth variation within the Earth's oceans.
km, altimeter measurements
resolutions on the order of 7
are not suited for near shore bathymetry
where depth
variations over meter distances are needed.
E.
PASSIVE OPTICAL METHODS
The
were
first
field
of remote sensing can be dated back to as early as 1858
placed on balloons and used to take large scale photographs.
Elachi (1987), this
1909.
Some
was soon followed by
kites, then
when cameras
As
outlined in
pigeons and eventually airplanes in
of the earliest references that could be found with regard to depth derivation
from remotely sensed data dated back
to
World War
II,
(McCurdy (1940) and Anon
(1945)).
Satellite Spectral
1.
Remote Sensing
Spectral sensors of the type adequate for
relatively few,
satellite
systems,
though the number
is
littoral
or clear water bathymetry are
set to increase rapidly in the
near future.
The
sensors appropriate for this kind of work are the traditional earth resources
LANDSAT, CZCS
T Observation de
la Terra).
(Coastal Color
Making use of
Zone Scanner) and
SPOT
(Satellite
the visible operating range of
Pour
LANDSAT,
listed
in
Table
(along with other operating characteristics), several papers have
2.1
explored the possibilities for bathymetric depth derivations.
Table 2.1 Landsat Thematic Mapper Spectral Bands.
Derived from Collins, 1996
Band Number
Spectral
0.45
1
In
particular
Lyzenga
0.52 (blue)
-
0.52
2
0.60 (green)
-
3
0.63
4
0.76
Bands (Jim)
-
-
0.69 (red)
0.90 (NIR)
5
1.55- 1.75
(SWIR)
6
10.4- 12.5
(LWIR)
7
2.08
(SWIR)
(1978)
outlines
-
2.35
method of mapping
a
multispectral data. Bierwirth (1993), which will be discussed in
an algorithm to get
at
sea-floor reflectance and water depth
water
more
depth
with
detail later, derives
LANDSAT
by unmixing
imagery.
Although no references were found
LANDSAT.
very capable to returning data very similar to
operating ranges of
SPOT,
to bathymetric applications for
Table 2.2
list
( 1
Mode
SPOT.
992)
Band
of Operation
nm
Range
nm
1
500
2
610nm-680nm
3
790
nm
-
890
nm
Black and White
510
nm
-
730
nm
Multispectral
Panchromatic
Spectral
Spatial
Resolution = 10
10
m
-
is
the different
Table 2.2. Operating characteristics for SPOT. Information derived from
Kramer
it
590
The CZCS instrument was launched
the
st
1
1978 onboard the
in
NIMBUS-7
satellite
and was
multiple channel optical sensor tuned for observing the ocean environment.
data was significant
in that
it
proved
that
such oceanic constituents as chlorophyll and
phytoplankton could be determined from remote measurements.
resolution on the order of
km,
1
CZCS
CZCS
However, given a
did not prove useful for small scale or shallow
water measurements.
Airborne Spectral Remote Sensing
2.
The Visible
/
Infrared Imaging Spectrometer (AVIRIS),
airborne spectral imagers.
It
was developed
as a result of the
was one of the
first
need for greater spectral
resolution than satellite based instruments could provide and the subsequent high data
volumes. The success of
this sensor
prompted a push
to
develop what
is
now
called the
hyperspectral sensor and resulted in such systems as the Hyperspectral Digital Imagery
Collection Experiment sensor
will
shortly
be
that will not
included
anticipated to be the
Initial results
first
in
be discussed further here.
payloads;
satellite
Hyperspectral systems
NASA/TRW
the
in operation
Lewis
satellite
from several experiments conducted with hyperspectral sensors have
These data were taken on October 2
The scene was taken by
the
AAHIS was
n
in
over an area of coral reef
AAHIS
the
high quality images as
instrument,
at
shown
in
Figure 2.8.
Kaneohe Bay, Hawaii.
operated by
primary instrument flown
in
SETS Technology,
the
Island
Radiance
experiment conducted by the Hyperspectral
MASINT
(HYMSMO)
Kaneohe Bay, Hawaii. Coincidentally,
office in October, 1995 staged at
figure illustrates a
substantial
number of
amount of sun
reflect the variety of
is
such, in 1997.
been very exciting and have resulted
Incorporated.
Hyperspectral Imaging
There are many other instruments currently
Spectroradiometer (AAHIS).
and under development
(HYDICE) and Advanced Airborne
Support to Military Operations
the problems in the remote sensing area.
glint (small
bottom types
white spots).
The
is
a
substantial color variations
(coral, sand, etc.), as well as
11
There
the
water depth.
Figure 2.8.
radiance.
-
band
1
Three color image of run 2oct_rll, taken
Red
band 50 (705 nm), Green
Exploitation of the data for water depth
These data offer
at Island
band 25 (567 nm), Blue
(435 nm). Derived from data provided by HYMSMO.
-
fair possibilities,
-
was one of the primary goals of the experiment.
but aircraft motion makes geo-registration of the data
difficult.
Several experiments have been flown over Lake Tahoe resulting in excellent data.
Hamilton
et al.
(1993) applies an empirical model to one of these data sets
to derive depth information.
The model used
measured parameters, and requires
is
in
an attempt
based on a multiple regression of
apriori depth information;
it
will be discussed in
greater detail later in this thesis. Table 2.3, gives the spectral operating ranges of both the
HYDICE
and the
AVIRIS
instruments.
12
Table
2.3.
Spectral
Band
AVIRIS and HYDICE.
Characteristics of
Derived from Collins, 1996
Instrument
Spectral
Range
Number
(fim)
of Spectral
Bands
AVIRIS
HYDICE
Kappus
et al. (1996) look at
Kappus
224
0.4
221
-
2.5
Lake Tahoe data taken on June 22
not explore depth derivations, however an
HYDICE
0.4-2.5
initial
shows
that the radiance values
1995.
,
They do
analysis of the quality and usefulness of
data in determining water radiance parameters
et al.
nd
is
provided.
determined from
Figure 2.9 from
HYDICE
measurements
agree closely with the ground truth measurements as well as the modeled values.
Water Leaving Radiance
solid: HYDICE
clotted: ground
dashed:
0.40
0.60
0.50
Figure 2.9. Comparison of Remotely sensed
that of
As
will be
shown
measured and modeled
later,
most important steps
3.
truth
WDROLIGHT
data.
0.70
HYDICE
From Kappus
data to
et al.
(1996)
an accurate calculation of the water leaving radiance
in extracting
is
one of the
bathymetry.
Recent Developments
The quality of measurements taken by
follow-on instruments such as
SeaWIFS
CZCS
to be carried
prompted the development of
on SeaStar and the Ocean Color
and Temperature Scanner (OCTS) onboard the Advanced Earth Observing
13
Satellite
(ADEOS). ADEOS, considered
and
is
OCTS
the follow
on
to
dedicated to Earth environmental research.
CZCS, was launched
As described by
August 1996
EROC
(1996), the
sensor will be utilized to observe the ocean environment. Taking advantage of 12
bands covering the visible and thermal infrared regions,
of
in
dissolved
measurements
substances,
will
be
and
phytoplankton
crucial
in
helping
sea
it
measures spectral reflectance
surface
researchers
temperature.
come
to
a
These
more complete
understanding of the particulate distribution within water. Understanding this distribution
better,
is
a necessary step in deriving shallow water bathymetry.
gather similar information and
is
expected to be launched
14
SeaWTFS
in 1997.
is
expected to
OPTICAL MEASUREMENTS
III.
The taking of
optical
measurements requires an understanding of (and models
a wide range of optical processes.
Atmospheric transmittance and absorption, surface
reflectance at the ocean surface, and the volumetric scattering
addition,
when analyzing measurements over shallow
will play an important role as well.
needed for
A.
this
for)
all
play important roles. In
waters, reflection off the substrate
In the sections that follow, the optical
elements
study are presented.
GEOMETRICAL RADIOMETRY
radiance
'Spectral
hydrologic optics.',
is
Mobley
fundamental radiometric quantity of
the
(1994).
It
light field, including the spatial (x),
dependence. This
directions,
is in
temporal
directional (£
(t),
all
in
other
description of the structure of the
full
),
and wavelength (X)
which are measured over
contrast to the irradiance quantities
and therefore contain no directional dependence.
target illumination while radiance defines instrument
1.
from where
gives a foundation
radiometric quantities can be derived, and provides
interest
all
Irradiance describes the
measurements.
Radiance
Equation
[3.1] describes the quantities
which comprise radiance.
of the radiant energy, within the solid angle AQ., that enters a sensor and
a detector element of area
AA
L&'S&K)
AQ
is
within a time At and over a wavelength band
A
A
^
fA
A,
(W m
15
2
1
sr
nm
a measure
is
incident
AX
.
1
).
(3.1)
upon
Irradiance
2.
In contrast to radiance,
when measuring
or working with units of irradiance, the
angular dependence on the amount of radiant energy
is
removed, and the equation
reduced to radiant energy per unit time, per unit area, per unit wavelength as
in
is
Equation
[3.2],
E
^ v^ s
However, the detectors of
2
fPA , (W m" nm
A
interest
1
(3.2)
).
only receive photons from
within
a
particular
hemisphere, thus leading to a hemispherical dependence on irradiance measurements.
While
sensor limitation, by rotating the sensor 180°, radiation measurements can
this is a
be made from both hemispheres.
For most environmental applications, sensors that
measure irradiance are positioned
straight
up
downwelling irradiance, and then
straight
down
and reflected from the Earth's surface
-
to obtain readings of the sky energy
to obtain a
-
the
measure of energy emitted
the upwelling irradiance.
Reflectance
3.
Two
quantities that will be of use are the spectral irradiance reflectance R(z;A,)
and the spectral remote-sensing reflectance
R
rs (0,(t);A,),
defined as Equations [3.3] and
[3.4] respectively.
RtoX)*£&Q,
(3.3)
Ej(z;X)
<P,0;X)»— -=— L
J?
1
(sr
).
E,(z = a;X)
Where E u and Ed
irradiance,
and
in
(3.4)
Equation [3.3] are the spectral upwelling and downwelling plane
R(z;?i) is evaluated just
below the surface of the water.
16
In Equation [3.4]
Lw
is
referred to as the water leaving radiance and Ej
R
of the water, so that
rs
is
a measure of the
is
now
evaluated above the surface
amount of downwelling
light that has returned
through the water surface for detection.
Radiance Invariance
4.
The radiance invariance law
Simply
stated,
photon path
'Radiance
in
example, Figure
is
an important consequence of the measurement.
is
distinguished by the property that
a vacuum.', Mobley (1994).
3.
1
showing two
,
it
does not change along a
This can be illustrated by a geometric
different viewpoints of the
same system.
(a)
Sr
(b)
Sr
Figure
3.1.
Radiance Invariance
In (a) the radiance quotient can be described as
from the surface S
Sr
at
Ao
is
Q.Q
r,
r
/
Ao^o, where
incident on the collection surface, Ao-
The
O
r
is
the radiant
Q
O
/ArQ r where now
,
surface S r of variable area
at the
the solid angle
described by
r
A
to the collector's surface.
17
r,
power
solid angle subtended
and distance between the emitting surface and the collector
in (b), the radiance is
from a point
O
the radiant
is r.
power
O
by
Conversely
originates
and travels within a bundle confined by
In either
viewpoint the radiant power
incident on the collectors surface remains unchanged,
solid angle, Q.
-
A/r
Equation
,
=
From
<J> r .
the definition of
[3.5] follows.
^
It
3>o
=
Q A =Q A
r
(3.5)
.
r
then follows from the definition of radiance, that
U=O
r
O /AA = U
/AoQo =
(3.6.a)
thus
Lo
change the amount of radiation
[3. 6. a]
a vacuum, the
and
medium through which
can be developed to separate
LIGHT AND
As
in the
this
journey to the sensor. With
from noise inherent
through a medium,
and constantly changing,
vacuum.
how much
this in
to a particular
If
in
not
of the
mind, models
medium.
it
will interact in
such a way as to change the
Whether these transformations are minor, or extremely
in the past
is
air
fairly
and water. The atmosphere, although very dynamic
well
for a
more
understood, and several models have been
decades that predict light propagation within
of this interaction and the associated model
However,
shown
dependent on the nature of the medium. In particular the two mediums that
paper will be interested in are
developed
the radiation travels determines
real signals
characteristics of that light field.
is
relations
HOW IT INTERACTS WITH WATER
light travels
significant,
The
that arrives at the detector.
[3.6.b] holds as long as the radiation travels within a
emitted signal will be attenuated
B.
(3.6.b)
between the source of emission and the collector does not
In other words, the distance
Equation
= Lr-
'MODTRAN3.5'
is
A
brief discussion
presented in section HI.C.
detailed discussion of the subject, the reader
18
it.
is
referred to
Robinson
(1985), or Stewart (1985).
suspended
material
in
However, water
much
is
concentration
greater
medium which
a denser
that
In
air.
contains
addition,
more
these
concentrations change rapidly over very small spatial dimensions making water a very
difficult
medium
to model.
understand
body of water
the properties of a
Mobley (1994),
To
this interaction,
relate to a light field.
understand
depend upon both the medium
This second category
is
itself
is
how
Following the reasoning of
depend upon the medium
inherent optical properties (IOP's). The second category
1.
first
the different properties of water can be divided into essentially
categories; the first being those properties that
that
one must
two
itself,
defined as
composed of those
properties
and the directional structure of the
light field.
defined as apparent optical properties (AOP's).
Inherent Optical Properties
IOP's can be better understood by
volume of water
visualizing
first
AV and thickness Ar, Figure
how
light interacts with a small
3.2.
d>„(X)
AV,
> om
<t>A)
> *A)
Ar
Figure 3.2. Geometry used to define inherent optical
properties.
From Mobley
(
Using the notation of Mobley (1994), Oj(X)
collimated
beam
column of water,
of monochromatic
O
t
(A,) is
light,
1
is
O
994).
the incident radiant
a (A,)
a measure of the radiant
19
is
the radiant
power
power of a narrow
power absorbed by
that is transmitted
a
through the
same column of water,
and
\j/
is
O
s (A,)
is
the radiant
the scattering angle.
Summing
conservation of energy gives Equation
Oi(A.)
From
this
power
=
that is scattered
by the column of water
the different terms in accordance with the
[3.7],
O
a (A.)
+ Q,(k) +
<t> t (k).
(3.7)
such properties as the spectral absorptance coefficient,
relation
beam
spectral scattering coefficient, b(k), and the spectral
a(X,),
attenuation coefficient,
the
c(X,),
can be defined.
Spectral Absorptance
a.
The
spectral
absorptance
absorbed within AV, Equation
defined as the fraction of incident power
is
[3.8].
A(X).£H.
Then by taking
(3.8)
the limit of A(k) divided by the length of the water
column Ar Equation
[3.9],
fl(*)»lim-^.
Ar-^o
with the spectral absorption coefficient a(k) having units of m"
power
Ar,
that
is
3 9)
-
.
Spectral Scatterance
b.
The
(
Ar
spectral scatterance
is
similarly defined as the fraction of the incident
beam
as
it
scattered out of the
passes through the column of water of length
Equation [3.10],
B(X)=
O A(X)
20
J
,
(3.10)
and the spectral scattering coefficient
b(A,) is
defined as Equation [3.1
1],
W)«iim^.
Spectral Transmittance
c.
The
to incident
(3.1D
power
spectral transmittance, T(A,),
is
given as the ratio of transmitted power
as in Equation [3.12],
O
(X)
<&,.(X)
T(^)
is
a
measure of the amount of radiative power
that passes
through a water column.
Other Significant Quantities
d.
Several other IOP's are derived from these 3 quantities.
defined as the
spectral
beam
sum of
first is
the spectral absorption and scattering coefficients and
is
simply
called the
attenuation coefficient Equation [3.13],
c(k)
The beam
The
-
a(A.)
+ b(?l).
(3.13)
attenuation coefficient, in turn leads to another important quantity called the
optical depth, defined as a
measure of the attenuation of energy due
and scattering, and given by Equation
to both absorption
[3.14],
z
£=Jc(z>fe'.
(3.14)
o
Where
the
beam
geometric depth
attenuation coefficient c(z)
z.
21
has been expressed as a function
of
One
final quantity
absorptance). This term
of note
is
more commonly
is
called the spectral absorbance
-
(note not the
referred to as the optical density and
is
given
by Equation [3.15],
^
D(X) = log
5,0
10
<i>
v
- A(k)]
= -log.Jl
5l °
Knowing
the IOP's
field will interact with a
itself,
a very important step in being able to
is
(3. 15)
model how a
light
body of water. However, these properties depend not only on the
but also on the various constituents within the water.
important to be concerned with the various constituents that
water.
.
Water Constituents
2.
water
(?i)+<D,a)
The main obvious
difference between the two
various amounts of dissolved
salt.
Although these
is
salts
It
make up both
is
therefore
fresh
and sea
the fact that sea water contains
do not have
significant effect
on
absorption in the wavebands of interest, namely the visible portion, they do increase the
scattering
above
information
in
that of fresh
Mobley
(1994),
water by approximately 30%. Table 3.1, derived from
lists
several of the constituents that
may be found
in
both
types of waters, and gives a brief explanation of each. Particulate matter can, in general,
be divided into two separate categories based on origin: biological and inorganic sources.
Those
particles that are of biologic origin include bacteria, phytoplankton,
and organic detritus (particulate matter
left after
zooplankton
the death of an organism and organic
waste). Inorganic particles enter the water as a result of the erosion of terrestrial rocks or
soil.
22
Table
3.1.
Types of water
constituents.
Comments
Matter Type
Type of Particle
Organic
Colloids
Contribute significantly to back scattering
Bacteria
Contributes
significantly
to
particulate
backscatter,
Phytoplankton
Primarily responsible for determining optical
properties of most ocean waters.
Organic Detritus
Primary
component
backscattering
in
the
ocean
Inorganic
Zooplankton
Very small
Quartz Sand
Typically very finely ground
living animals
Clay Minerals
Summing
3.
As described
the Different Inherent Optical Properties
in the last section,
water contains
many
different types of particulate
Since each of these will interact with a field of light
matter.
in a different
manner, the
inherent optical properties will change as a function of the distribution of particles within
a body of water.
The
particles to be very
the
sum
water, being a very dynamic entity, also causes the distribution of
dynamic, and therefore
of the effects that
is
difficult to exactly predict.
of interest.
By knowing
scattering for different particulate matter, the effects can be
how
the entire
body of water
In particular, it's
the general absorption and
summed
to
develop a
AOP's can be
will interact with the light field.
described as a derivative of IOP's that are dependent on both the nature of the
and the directional structure of the ambient
4.
When
Absorption
in
feel for
generally
medium
light field.
Water
discussing the absorption of light
in
water,
particulate matter play a role, and need to be modeled.
23
most
The
all
of the above mentioned
total
absorption coefficient
will
be the
sum
of
all
the different particulate matter coefficients, as well as the inherent
absorption due to the electromagnetic
(EM)
properties of pure
water.
The models
presented below are taken from Mobley (1994).
Absorption in Pure Water
a.
For a more complete understanding of
substances with different index of refraction, the reader
For the purpose of
this text
it
is
assumed
is
properties as they relate to
referred to Klein et al (1986).
that the reader has sufficient
wave propagation.
optics to understand the basic principles of plane
relationship
EM
between the absorption coefficient
a(A,)
background
To
in
begin, a
and the complex index of refraction
k(X) (Also called the Electrodynamic absorption coefficient)
is
defined by Equation
[3.16],
4nk(k)
a(X)
(3.16)
X
Where X
is
the in vacuo wavelength.
Figure 3.3,
is
a representation of
with wavelength.
0.01
0.1
1
10
nm
100
1
10
100
nm
nm
nm
\ivn
1
1
mm cm
10
1
cm
m
wavelength
Figure 3.3. Complex
refraction in Pure
Mobley
(left)
and Real Index
(right) of
Water verses wavelength. From
(1994).
24
how
k(X) varies
'
»
Mobley (1994)
In addition,
m
refraction
decrease
in
(where
k{X) as
sharply again as
the
m
it
=
n
The
ik).
feature of interest
the nine order of magnitude
is
approaches the near infrared. This characteristic
it
complex index of
passes through the near ultraviolet into the visible, and then rises
absorption
spectral
-
defines n(X) to be the real part of the
in
water through Equation
pure
is
[3.16],
directly related to
and
is
displayed
graphically in Figure 3.4.
Iff
1
£
,
-—
a
!0
h
^i
c
I0
4
<*-
*—
<L>
O
o
I0
seawater
2
c
o
*—
10"
ex
t—
o
00
X)
03
2
_j
TO"
14
i r
io-
10
-10
10"*
i
i_
2
10"
0"
wavelength X (m)
Figure
line)
3.4.
Absorption coefficient of pure water (solid
and pure sea water (dotted
wavelength.
It
is
this characteristic
bathymetry possible.
measurements
From Mobley
line) plotted verse
(1994).
of pure water and pure sea water that
However
it
is
also this characteristic that restricts bathymetric
to the visible portion of the spectrum.
shallow water bathymetry
is
makes shallow water
In fact, Figure 3.5
further restricted to the blue
spectrum.
25
-
shows
that
green portion of the visible
*
0.15
W5
o
03
3
fl>
*i
3
0.10 CTQ
n
o
rt
c
'o
£
•*>
n?>
o
y
c
o
o
3
«—
0.05
<5-
o
i
0.00
200
300
500
400
wavelength
600
700
800
(nm)
X,
Figure 3.5. Absorption coefficient a(X) (solid line) and
scattering coefficient b(A.) (dotted line) of pure water
plotted verse wavelength.
From Mobley
(1994).
Figure 3.5 clearly shows a sharp increase in absorption outside the blue
-
green portion of
the spectrum.
b.
Absorption
Due
to Dissolved
Dissolved organic matter, which
CDOM
or gelbstoff,
fairly closely
is
usually taken to be Xo
c.
referred to as yellow matter,
[3.17]:
a Y a) = a v
Thus, by knowing the
commonly
Absorption by yellow matter can be modeled
well understood.
by Equation
is
Organic Matter
initial
= 440 nm,
a
absorption
)e-°
0Ha - x °\
a y (k
the absorption at
Absorption
Due
to
)
all
at
(3.17)
some
characteristic
wavelength,
other wavelengths can be modeled.
Phytoplankton and Organic Detritus
Photosynthetic pigments of various types are the major contributors to
absorption
contributor.
be expected
by phytoplankton, of which chlorophyll
Chlorophyll
is
is
common
is
known
to all photosynthetic plants,
a strong absorber of visible
the green portion of the visible spectrum.
light.
This effect
is
to
be the strongest
and therefore
as
would
particularly strong within
Results form the analysis of several different
types of phytoplankton are plotted in Figure 3.6.
26
450
400
500
550
600
650
700
wavelength X (nm)
Figure 3.6. Total absorption coefficient for selected
chlorophyll concentrations C.
It
From Mobley
(1994).
should be noted that each plot of the absorption coefficient takes on a
blue portion of the spectrum
minimum around 600 nm
significant
at
nm
440
in the
and
in the
red at 675
nm, while
green portion of the spectrum.
consequences when trying
maximum
it
in the
takes on a
This effect will have
to derive bathymetric information in areas
with a
high chlorophyll concentration.
d.
Contributions
From Sediment
Absorption due to inorganic material, although possibly just as significant
as that of organically derived particles,
is
not well understood.
Much
of the research in
the field of bio-optics has been directed toward understanding the growth of biological
constituents in different areas of the ocean.
As
help to model the optical interaction of light
a result, algorithms have been derived that
in
waters with varying concentrations of
organic material. However, comparatively speaking
little
trying to better understand the role of sediment in water.
clear fresh water, the effects of sediment load will be
e.
effort has
been put forth
However,
for the purpose of
assumed
to
in
be minimal.
Deriving a Model for Total Absorption
Several models have been developed that lead to a description of the total
spectral absorption coefficient for a given water type, each of
27
which
in
some way or
One
another will depend on the definitions above.
mentioned
at this point,
due
to the
model Hydrolight3.0,
transfer
[3.18] attempts to
express
it
in
model
to
consequences
be discussed
it
later.
algorithm, in particularly, will be
have on running the radiative
will
The algorithm presented
a(X), due to
the total absorption
one complete formula.
065
om4a
a(X) = (a w a)+0.06a c *\X)C
)(\ + 0.2e-
Scattering can be defined as the redirection of energy,
removal of energy.
EM
radiation can be scattered
mentioned constituents of water. The manner
number of
refraction,
(3.18)
)
which
it
by what
is
is
where
as absorption
virtually
is
wavelength of radiation and viewing geometry.
The Mie parameter
[3.19].
in
by
different parameters, including particle shape
different types of scattering
- 440)
Water
Scattering in
5.
Equation
above terms, and
the
all
in
Mie
size,
the
any of the above
scattered
and
is
is
a function of a
particle index
of
theory characterizes the
called the scattering size parameter %, Equation
simply a ratio of the circumference of a particle to the
wavelength X of the incident radiation,
X~.
where
r is
the radius of the particle.
manner
in
ways
which radiation
in
which radiation
will
As would be expected,
scattered will be different.
is
0.19)
be scattered as a function %.
28
for different values of
%
the
Table 3.2 outlines the different
Table 3.2 Types of scattering based on the scattering size parameter %.
Type of
X
Very
x<io10'3
50
As with modeling
little
scattering
Rayleigh Scattering
<x<-l
Mie
< % < 50
.1
Scattering
Scattering
Geometric Scattering
<X
absorption,
it
is
very difficult to sort out the different individual effects
within different water types. Therefore, several analytical formulas have been developed
to
model
the curves
detailed in
Mobley
which
result
data.
Several of these models have been
(1994), and will not be discussed in detail here.
RADIATIVE TRANSFER
C.
Prior to understanding a
the history of the signal,
sensor.
radiation
The theory of
together in what
is
where
i.e.
The processes
is
you must come
signal,
came from and what path
to an understanding of
it
took to arrive
at the
whether
that transfer is
that apply to
through the atmosphere,
atmospheric modeling are
summed
called the atmospheric Radiative Transfer Equation, and for our
in
elementary form.
the radiative transfer equation
^Sensor
Where L Se nsor
it
to another,
purposes can be expressed
Robinson (1985),
measured
radiative transfer explains the rules that govern the transfer of
from one place
water or orange paint.
=
Lpath
+
1
Lsky
+
is
1
Using similar notation
to
L ky
s
is
that of
expressed as Equation [3.20],
Lwater-
(j.ZU)
a measure of the total radiation arriving at the sensor, Lp at h
atmospheric path radiance,
is
from measured
is
the
a measure of the radiance reflected off of the surface,
the atmospheric transmittance and Lwater
29
is
T
defined as the water-leaving radiance.
Figure 3.7 depicts the general terms involved and gives a rough idea of the different paths
the photons take to arrive at the sensor.
Figure 3.7. Radiative Transfer through the
The path radiance term
sensor field of view
air
and water.
is
a resultant of
(FOV) and have
all
the photons that originated outside of the
been, for one reason or an other, scattered by the
atmosphere into the FOV. The path radiance terms include the dotted lines
the arrow labeled Lp a th-
and
is
that
is
incident on the water within the sensors
FOV
subsequently reflected or scattered back toward the sensor, can be considered to
come from two
that radiation
general terms
from the sun
However, sky
surface into the
glitter is
The
—
sun
glitter
and sky
glitter.
Sun
glitter
can be described as
that is reflected at the sea surface, directly into the
FOV.
scattered by the atmosphere, prior to being reflected off the
FOV. The
lines in Figure 3.7.
is
Radiance
that lead to
contributions that
make up L k y
s
are represented
final contribution to the overall radiance
defined as the water leaving radiance, Lw, which
30
is
shown
by the dashed
measured by the sensor
as the solid lines in Figure
Lw
3.7.
sum
the
is
of
those photons that actually enter, interact with and then emerge
again, from the water, within the sensors
As
model
briefly
mentioned
earlier,
FOV.
MODTRAN3.5
the atmospheric effects discussed above.
is
a radiative transfer
MODTRAN3.5
of
lifted as
December
MODTRAN3.5
reference for
et al. (1996),
which
is
1996.
At the time
was not
available.
a paper that
this thesis
However
had been submitted
was
that will
the latest generation
is
BETA
of atmospheric modeling programs developed by Phillips Laboratory.
were
model
restrictions
written, a substantial
Phillips Laboratory cited
A
for publication.
discussion of the parameters used for the modeling of Lake
Tahoe
will
Berk
complete
be provided
in
Chapter IV.
Radiative Transfer at the Water
1.
Once atmospheric
next step
is
is
to
model
effects are
understood and modeled, Lw can be derived.
the radiative transfer process within the water
very difficult as the radiation
is
itself.
However,
The
this
effected by scattering at the surface of the water,
absorption and scattering within the water column and scattering and attenuation of the
bottom material. All of which are extremely complex and constantly varying.
Mobley (1994)
presents a complete and thorough discussion of the process of
radiative transfer within the water.
Curtis D. Mobley, can be used to
HYDROLIGHT
model a
3.0,
which was developed by Dr.
variety of different aquatic environments based
on many of the parameters explained above. The more information a user
into the
As
will
A
discussion of the inputs used for Lake Tahoe will be given in Chapter
be pointed out
later, the
parameter of
interest,
wavelength dependent diffuse attenuation coefficient (Kd).
Mobley (1995) and
Kd
able input
code concerning the particular makeup of a body of water, the more accurate the
results will be.
V.
is
is
provided as an example of
.
31
within the water, will be the
Figure 3.8
HYDROLIGHT' s
is
Figure 8 from
ability to
compute
350
400
450
500
550
650
600
700
wavelength X (nm)
Figure 3.8. Example of modeled Kd.
Figure
The values
8,
from Mobley (1995).
for Kd(A,) upwelling (dotted line) and Kd(?i)
downwelling
(solid), plotted in
Figure 3.8, are calculated for pure water which also contains such particulate matter as
colored dissolved organic matter and chlorophyll-bearing particles.
D.
BATHYMETRY FROM REMOTELY SENSED RADIATION
1.
Unmixing
Due
Depth and Substrate Reflectance
An Exploitation of LANDSAT Data
Effects
Bierwirth Algorithm
-
Water leaving radiance
is
the
column. This upwelling radiation
the radiation which
leaving radiance,
L
s
is
due
is
to
amount of
the
radiation upwelling
sum of radiation
incident off of the substrate and
to the bulk reflectance of the water.
cover, Ldw the radiance due to the bulk reflectance of the water
Tw
the transmittance within the
32
The
from within the water
Let Lw be the water
the radiance of the wet substrate material, as if there
radiance) and, as before,
-
column
were no water
(i.e.
medium. Following
deep water
the
method
of Jupp (1988), and Bierwirth
et al.
combined
(1993), the preceding terms can be
to
form
Equation [3.21],
Lw = T w L +
now
This expression
takes into account
column by combining them
between
and
allows to pass.
1
,
it
Tw
into the
is
one term
Tw
.
If
Tw
is
normalized so
that
it
varies
then becomes a fraction for the amount of radiation the body of water
then takes the form of
the attenuation coefficient and z
exact, but
(3.21)
.
of the scattering and absorption of the water
all
Tw =
Kd
-T w )Ldw
(1
s
come very
is
e-
2Kdl
(3.22)
.
the depth. Equations [3.21]
way
close to modeling the
in
and [3.22] are not
which radiative transfer takes place.
Jupp, therefore, argues that they sufficiently model the radiative process within the water
studied. Equation [3.23]
is
the result of
combining Equations [3.21] and
L w = Ldw +{L
[3.22],
-Ldw )e- 1K->\
s
(3.23)
Bierwirth (1993), follows a similar development to that of Jupp (1988) up to this
point.
Bierwirth then seeks to unmix the effects due to reflectance with those due to
depth, by deriving a substrate reflectance factor for each band processed.
normalizing Equation [3.23] to reflectance values, as
R w = RJw +(R
Assuming
that the
deep-water reflectance
is
s
in
He
begins, by
Equation [3.24]
-R Je- 2K^.
d
(3.24)
small compared to the substrate reflectance,
Equation [3.24] can be expressed as Equation [3.25],
RM -RM = Rwl '=R e* K"-> i=LN.
li
33
(3.25)
Where R w
'
the water leaving reflectance, corrected for deep water, the i-subscripts
is
specify a wavelength dependence and
that for ideal
N
the
is
all
of the reflectance from the substrate
Solving for depth z
in
^-W;i =
N+l unknowns
need
that
N
values of
taking a linear combination of
geometric
mean
falls out.
This assumption
RS
i
all
A
(3.26)
as
is
the depth, giving a total of
unique solution
is
However, by
unlikely.
of the substrate reflectance equals one, a solution for the estimated depth
is
equivalent to letting the second term on the right hand side
O V
,-i-2K
4-t
dl
al.
.,N.
the wavelength dependent equations and assuming the
of Equation [3.26] equal zero. The resultant
Bierwirth et
unknown
are
be sorted out.
to
attenuated.
"2 A",,
2K„,
[3.26], the
is
Equation [3.25] will be zero.
Equation [3.25], gives Equation [3.26],
=
For Equation
R wi = R dwi and
measurements over deep water,
This indicates that
number of wavelength measured. Notice,
is
Equation [3.27];
V
NAT
(1993), in applying Equation [3.27] to multispectral
LANDSAT
data
taken over Hamelin Pool, Shark Bay, Western Australia has been able to produce an
estimated depth image, Figure
3. 9. a,
and
3.9.b.
Artificial illumination has
been applied
Figure 3.9.b to get a better idea of the detailed structure that has been derived.
comparison, Figure
3.9. c
depicts
a
true
depth
image of
the
hydrographic survey. Z, the estimated depth, has an error of Az.
to this depth error
is
A
the assumption of an overall bright bottom,
inaccurate report of depth over areas of dark substrate
34
pool
resulting
in
For
from
primary contribution
which
results in the
\
(3.9.b.)
(3.9.a.)
(3.9.c.)
Figure 3.9. Derived and measured bathymetry for Hamelin
Pool, Bierwirth et
In
comparing Figure
3.9.a
and
correlated "reasonably" well.
substrate
(i.e.
al.
3.9.c,
(1993).
Bierwirth
et al.
point out that the two are linearly
However, he also makes the point
near the bottom and
in the in the tidal
that, in
regions of dark
channels near the top), the depth
is
exaggerated.
Empirical Model
2.
Hamilton Algorithm
-
An
Application of AVIR1S
Data
A
more empirical approach
is
possible.
Hamilton
et al.
(1993) estimate depth
in
Lake Tahoe using an empirical model of the form.
Z = aQ +
Where
R
Equation
rs
is
ai(R K (h)) +
^(RA)).
(3.28)
the remotely sensed reflectance at a particular wavelength, as defined
[3.4]
and
ao, a\
and ai are the
linear coefficients.
35
To determine
by
these linear
'
coefficients for
Lake Tahoe, Hamilton
compared along a
et al.
transit line of varying
explain that the surface spectra was taken and
Two
bottom depth.
chosen that displayed a large amount of variance
wavelengths were then
X = 560 nm. The application of a multiple regression revealed the
be ao = 34.96, a\ = 23.36 and
Figure 3.10.a
Hamilton
et
<?2
a contour plot of
is
al..
= 34.64 with a multiple
AVIRIS
X = 490
in instrument response,
nm
and
linear coefficients to
correlation coefficient of 0.96.
data taken over a portion of Lake Tahoe from
For comparison, Figure 3.10.b shows the charted depth of the same
region.
•
*
-^
>»
*
«•
'
,«
.a
-^
"
.0
»1
•l
f
1.
.3
0^
i>
1"
t«
»v
.
**
/,.
.'
,05
•>
»*
'*
C'
*\
.,
.
tt
;
•»•
•
;»
" ""
•'*.
•
««
1
11
.!«
rr*
K%-
:
*.
v;
;
y
*"
r
;.
^
***..•"'
/
\,«
..-
(3.10.b)
(3.10.a)
Figure 3.10.
»-;i
«*"
..«
>'*
«
R**'„
p
..»
»'
'
"
A comparison of the depth derived from the
Hamilton algorithm (3.10.a) to the charted depth (3.10.b)
for a region of Lake Tahoe. Hamilton et al. (1993).
As Hamilton
et al.
concludes, the two scenes are not exact, but do agree in
major features such as the 60
ft.
depth curve.
36
some of
the
MEASUREMENTS AT LAKE TAHOE
IV.
MEASUREMENTS AT LAKE TAHOE
A.
Due
to the
complexity of the water environment, as described
in the last chapter,
the best place to start deriving bathymetric estimates with data from passive sensors
from
a relatively clear environment.
Nevada border high within
Lake Tahoe, which
little
was conducted on June
As explained
m
1906
is
high
and a longitude of 120.19°W, and can be considered a
fairly
minimal runoff from rivers and low chlorophyll values
(less
was extremely
clear.
The data was taken
sun glint off of the water, with an aircraft
flight
at
at
B.
minimize sun
Kappus
et al.
a latitude of 39.14°N,
homogeneous body due
than
.2
mg
m
path of approximately 100°.
at
The
).
approximately 10:05
path was chosen to correspond with the azimuth angle of the sun
to
in
22, 1995, on a calm, clear day with very
atmospheric aerosols present. Lake Tahoe
at the time,
located on the California-
the Sierra-Nevada mountains provided the ideal conditions to
begin developing a model for shallow water bathymetry.
(1996), the experiment
is
is
am
to
lake,
to avoid
This flight
the time, again trying
glint off of the waters surface.
INSTRUMENTS
Two
instruments were flown
Hyperspectral
Digital
at
Lake Tahoe the day the experiment took
place;
Imagery Collection Experiment (HYDICE) and the Airborne
Visible infrared Imaging Spectrometer ( AVIRIS). For the purpose of this paper, the focus
of the discussion will be the use of
HYDICE. HYDICE
based calibration to convert measured raw
HYDICE, which
from 0.2
km
is fitted to fly
to 1.15
above the lake, which resulted
numbers
onboard a Convair-580
km, dependent on
conducted over Lake Tahoe, the
digital
aircraft
in a
utilizes
onboard and laboratory
to physical units of radiance.
aircraft,
has a swath that varies
the altitude of the aircraft.
was flown
swath of 0.385
37
at
km
For the experiment
an altitude of 2.35
km
(5,000
ft)
and a corresponding resolution of
1.2
m.
Kappus
et al.
(1996) points out that this altitude was chosen for a number of
reasons, including minimizing atmospheric effects, flight path alignment, choice of swath
width and to allow sufficient collection time.
38
INITIAL
V.
The
distributed
HYDICE
MODEL APPLICATION
image of Lake Tahoe was obtained from the
HYDICE
Table 5.1
1995 Demonstration Tape, with scene of
HYDICE
5.1.
list
interest in
Altitude
"Yuma, AZ"
2
6514'
"Lake Tahoe, NV"
4
14,544'
23
25,982'
31
10,111'
Label
1
N/A
"support"
2
950629
3
950622
4
950622
"Cuprite,
5
950829
"Aberdeen,
The scene was
written to an
Interactive
2
8mm
NV"
Jim"
).
MD"
tape in the form of pre-processed radiance data, with
1
1
sr"
Initial analysis
and display was completed by
Data Language (IDL) produced by Research Systems,
addition, extensive use of
The Environment
for Visualizing
a product of Research Systems, Inc., and runs in the
sections will consist of an
initial
algorithm and the Hamilton
general idea of
indication of
how
how
to
HYDICE
bold type.
Run
Mission
m"
the tape information on the
1995 Demonstration Tape Information
File
units of (Watts
on a
office
1995 Demonstration Tape, along with several other significant
scenes taken that year, Table 5.1.
Table
HYDICE
et al.
Inc.,
utilizing the
Boulder,
Images (ENVI), which
EDL environment. The
analysis of the data utilizing the Bierwirth et
(1993) algorithm. This
CO.
initial
analysis
is
is
In
also
next two
al.
done
(1993)
to get a
the data responds to the different algorithms, thereby giving an
proceed with the
final analysis.
39
A.
APPLICATION OF THE BIERWIRTH METHOD TO LAKE TAHOE
DATA
Processed
1.
Figure 5.1,
on the eastern
is
a
HYDICE
Data
320 by 320 pixel display of radiance data taken
side of Lake Tahoe,
and
is
displayed as a
RGB
(Red
-
Green
with the Red wavelength set to 650 nm, the Green wavelength set to 550
wavelength
set to
450 nm. Selecting the wavelengths
in this
at
Secret Harbor
-
Blue) image,
nm
and the Blue
manner, allows the scene
to
be displayed as a simulated true color image to give the reader a qualitative impression of
the scene.
Figure 5.1
.
Raw
data image, displayed with
ENVI.
Within the scene, shown
in
Figure 5.1, are regions that have been highlighted by white
rectangles to display areas in which information for
region labeled
1,
initial
data analysis were taken.
The
was taken over an area of relatively deep water, while regions 2 and
were respectively taken over areas of rocky and shallow
40
substrate.
3
These regions provide
enough contrast
presented
in
in
relation to each other to sufficiently test ability of the
Bierwirth
each highlighted box
et al.
in
algorithm
(1993), to predict depth. Three pixels were chosen, one from
Figure 5.1, for analysis.
A
line plot of the
spectrum for each of
the three data points, Figure 5.2, indicates a distinct difference in the
amount of radiance
the sensor for each of the different pixels, with the lowest radiance values
data received
at
coming from
the rocky substrate and the highest values
coming from
the shallow water
over a sandy bottom.
Lake Tahoe - Hydice Data
30
~i
ooooooooooo
1
r
Deep Water
Rock
=t
Shallow Water _
20 -
0.6
0.
Wavelength
Figure 5.2.
HYDICE
(/x)
Spectra for Three Contrasting
Pixels.
Notice
how
the radiance values for each pixel are centered through the blue
portion of the visible spectrum, as would be expected from previous arguments.
41
-
green
Atmospheric Contributions
2.
The
first
step
atmospheric effects.
to
in
deriving bathymetry
MODTRAN3.5
model the atmosphere
at the
(Beta version
5.2.
MODTRAN3.5
sensor radiance for
the
code was used
1.0), radiative transfer
made with MODTRAN3.5.
parameters used to model Lake Tahoe
Run Type
Cards Used
correct
to
time of the experiment. Listed in Table 5.2 are several of
the parameters used for the different runs
Table
is
Sky Radiance
Path Radiance
1,
1A,
2, 3,
3A1,3A2,4, 5
1,
1A,
2, 3,
3A1,3A2,4,
Parameters
km
Visibility
120
Ground Altitude
1.905
Initial
Height
Final Height
4.25
120
km
km
1.905
km
km
N/A
km
N/A
1.905
km
Tangent Height
N/A
Viewing Angle
180°
N/A
Scattering
Mie
Mie
Day
173
173
Latitude
39.14°
39.14°
Longitude
120.19°
120.19°
Greenwich Time
17.08z
17.08z
Frequency Range
10,000 -25,000 cm"
Julian
Frequency Step Size
15
cm"
42
1.905
1
10,000 -25,000
1
15
cm"
1
cm
1
5
Path Radiance
a.
Inputting the above parameters,
mode. Assuming
Lpath
that the sensor
was computed. Figure
5.3
was looking
is
MODTRAN3.5 was
down
straight
first
run
at the lake, the
in
radiance
path radiance
modeled path radiance.
the resultant spectra for the
Modtran — Path Radiance
I
0.40
0.50
M
I
0.60
0.70
Wavelength
I
I
I
_
I
I
I
|
I
I
0.80
I
I
I
I
I
1
I
I
0.90
1.00
(/^)
Figure 5.3. Modeled Path Radiance for
Lake Tahoe, June
b.
22, 1995.
Sky Radiance
Next, the sky Radiance Lsky (described in section
running Modtran3.5 with the sensor located
The
resultant spectra
is
plotted as Figure 5.4.
43
at the
HC) was
surface, looking
computed, by
up toward the
sky.
"
1.0
Modtran - Sky Radiance
i'
'
1
1
1
1
n
1
0.8
0.6
c
0.4
0.2
0.0
0.40
0.70
0.60
Wavelength
0.50
0.80
0.90
1.00
(
(/j.)
Figure 5.4. Sky Radiance
Computed from
Modtran3.5, Lake Tahoe, June 22, 1995.
c.
Convolving Modtran3.5 Data
HYDICE
to
Match
HYDICE
has 79 measurement bandwidths of variable width between
and 1.0 (im while Modtran3.5 computes the radiance for around 1000 bandwidths.
therefore necessary to convolve the
HYDICE
after
it
sensor.
Figure 5.5,
has been converted to
is
modeled spectra
a plot of the
HYDICE
sum
to the spectral
44
It is
coverage of the
of path and sky radiance before and
wavelengths. The convolved spectrum
as a solid line.
.4
is
plotted
Modtran - Path plus Sky
].'[-.
0.6
0.8
Wavelength
(fi)
Figure 5.5. Convolved Path and Sky
Radiance, Lake Tahoe, June 22, 1995.
To compute
the water leaving radiance Lwater the wavelength dependent atmospheric
transmittance
T atm
Modtran3.5.
Figure 5.6,
convolved
to the
is
T atm was computed
also needed.
a plot of the
is
wavelengths of
as part of the path radiance run of
modeled transmittance before and
HYDICE.
T ransmittonce
1
.0
'
1
'
|
i
i
i
i
i
OS? v\'-
<""
08
'k
'
-A
:
J
/
\
C
'
o
|
'•'
0.6
-
01
C
o
.
o
;
€. 0.4
_
o
E
<
-
0.2
-
-
0.0
0.4
i
i
0.6
0.8
Wavelength
i
i
i
1.0
(/i)
Figure 5.6. Convolved Transmittance,
Lake Tahoe, June 22, 1995.
45
after
it
was
1
1
Water Leaving Radiance
d.
To compute water
look back
at
Equation [3.20]. However,
Lsensor(A)
Lwater
=
Lpath(A)
gives Equation
Substituting the
in
now
spectrum,
it is
the radiative transfer equation
Equation
+ T atm (A.) L
must be
[5.1],
+ T a m (A)
s ky(/l)
best to
Lwater(^)-
t
(5.1)
[5.2],
Lse„sor(^)-L'path
D ath
L water (^)
HYDICE
leaving radiance for the
expressed as a function of wavelength as
Solving for
1
(^)-Tatm (^)L sky
skv (^)
(5.2)
Tatm a)
modeled radiance values and
measured radiance of the three selected
the
data points into Equation [5.2], results in the water leaving radiance curves of Figure 5.7.
Hydice - Water Leaving Radiance
30
1
1
1
p
1
1
1
1
1
|
1
0.40
1
1
1
1
1
n
1
1
1
0.50
1
1
1
1
1
1
0.60
0.70
Wavelength
_
0.80
0.90
1.00
(/j.)
Figure 5.7. Water Leaving Radiance, as computed
for three contrasting data point, shallow-water,
deep-water and rocky
terrain.
46
-
As
with Figure 5.2, the radiance from shallow water (plotted as dark circles with a solid
line) is the highest,
the radiance
from
followed by the radiance from deep water (plotted as open circles) and
the
rocky region (plotted as a solid
wavelengths electromagnetic radiation
fact
by observing the radiance values
is
in
Recall that
line).
almost completely absorbed
Figure 5.2
Lw =
seen that this effect
is
it
(i.e.
at
is
higher
0).
In
true and
that corrections for atmospheric effects are reasonably accurate.
Normalizing
e.
At
radiance.
Ed(?t)
this point
most convenient
is
work with
to
reflectance instead of
Therefore, following Equation [2.4] a model of the downwelling irradiance
must be computed.
irradiance
it
to Reflectance
This was again accomplished utilizing Modtran3.5 run
mode. After convolving
the data to
found as a function of wavelength, Figure
HYDICE
in
wavelengths the irradiance was
5.8.
Modtran - Downwelling Radiance
2000
i
1500
%".
!
i
i
-
£*''.••"" r^KjA
'..
.
:
$kl
;
«$
v<*
•
>M
•
*r\
1000
:
-
,,-
a''
500
-
{
-
1
0.50
0.40
1
1
0.70
0.60
Wavelength
i
0.80
i....
1.00
0.90
(^t)
Figure 5.8. Down-welling Irradiance,
modeled
The remote sensing
Lwater(^),
reflectance,
by the down-welling
R
rs ,
is
for
Lake Tahoe, June
22,
found by dividing the water leaving radiance,
irradiance, Ed(A,).
data points of interest.
47
Figure 5.9
is
a plot of
R
rs
for the three
Remote Sensing Reflectance
0.020
0.015
0.010 -
0.005 -
0.000
0.40
0.45
0.50
0.55
Wavelength
0.65
0.60
0.70
(/x)
Figure 5.9. Remote Sensing Reflectance, Lake
Tahoe, June 22, 1995.
The remote sensing
reflectance,
reflectance varies between
R
and
s,
value will in general vary between
and
1
,
and. Here
.018.
Depth Derivation
3.
Several properties of the water must be
Bierwirth (1993) to derive depth from
R
s
known
In particular, to apply
.
use the method of
in order to
Equation [2.27] the
values for the wavelength dependent attenuation coefficients Kd must be known, or at
least
modeled
was used
for the water in question.
to carry out the
model of
the
several parameters that were input into
The
radiative transfer
Kd values within
the water.
HYDROLIGHT3.0.
48
model
HYDROLIGHT3.0
Table 5.3 presents
Table
5.3.
HYDROLIGHT3.5
parameters used to model
Lake Tahoe
Run Value
Parameter
HYDICE Central
Wavelengths
Julian
Day
Wavelengths
173
Latitude
39.14°
Longitude*
-120.19°
Pressure
17.65
Aerosols
5.0
Humidity
10%
Precipitation
.8%
120.0
Visibility
Average Chlorophyll
0.2
km
mg
m"
3
concentration
*
West Longitude
is
expressed as negative.
Several of the above listed parameters are "hard wired", so to speak, within the
file
'qarealsky.f and must be altered to match the particular environmental conditions of
interest.
HYDROLIGHT,
a.
a Radiative Transfer
Inputting the above parameters,
Kd(?i).
Figure 5.10,
convolved
to the
is
a plot of the
wavelengths of
Model
HYDROLIGHT
was used
modeled attenuation coefficients
HYDICE.
49
to
that
determine
have been
down — welling Attenuation
Diffuse
0.8|
8
'
'
'
'
I
'
'
'
'
I
'
'
'
'
I
'
'
'
'
'
I
Coefficients
'
'
'
!
0.4
0.45
0.40
0.50
0.55
Wavelength
0.60
0.70
0.65
(/z)
Figure 5.10. Attenuation Coefficients
Kd(A.), as
It
modeled by
HYDROLIGHT.
should be kept in mind, however, that determination of the attenuation coefficients
currently one of the most difficult parts of the problem, and a wealth of research
underway
will
to figure out the best
assume
that
HYDROLIGHT
above values
to
results for the
K^ values
b.
way
to
model these values. For the moment,
has sufficiently modeled
K<j,
continue the analysis of the Bierwirth method.
will
be examined
at the
and
this
is
is still
paper
therefore, use the
The
sensitivity of the
end of the next chapter.
Results of Bierwirth
Substituting the above modeled values for
Kd„ where the subscript
T
K<j(A,) in
Equation [3.27] for
indicates the wavelength dependence, the estimated depth can
be derived for each of the three data points, Table
50
5.4.
Table
Depths,
5.4.
from Equation
derived
[3.27], for 3 separate data points.
Bierwirth Depth
Data Point
Shallow Water
23.8
Deep Water
26.9
m
29.6 m
Rocky Area
The values given
R
s
.
The
Table 5.4 are indicative of assuming a constant bottom reflectance
in
results in the data, as
expected contain a large Az factor for each depth.
relative depth results for areas over
The
sandy substrate are relatively well behaved. However
by assuming a uniform bottom type, there
and dark rock. As a
m
result, the calculated
is
no way to
differentiate
depth over the rocks
is
between deep water
deeper than that of deep
water, resulting in unsatisfactory results.
APPLICATION OF THE HAMILTON
B.
METHOD TO LAKE TAHOE
DATA
In
R
rs ,
applying the method of Hamilton
as explained previously,
those used in Hamilton et
and the values for
«o,
fli
al.
was computed
et al.
(1993), the remote sensing reflectance
for the entire scene at similar wavelengths to
Using these computed scene values
and #2 given
in section HI.E.2
region of Lake Tahoe can be generated, Figure
soundings Figure 5.1
l.b.
51
for
R
rs ,
Equation [3.28]
a contour plot of the Secret Harbor
5. 11. a
and compared
to published
Derived Contour
300
- Using Homilton Algorithm
_,
,
,
.
JOO
•
•
'*
f,
iOO
h
4-^-'--
(S.ll.b)
(5.11.a)
Figure 5.11. Comparison of contour plot derived from Hamilton
et al.
(1993) algorithm to published soundings of the same region of Lake
Tahoe.
The
light colors within this
deeper water (white
is
scene represent shallow water as the darker colors represent
zero).
Therefore, for this scene the Hamilton et
al.
(1993)
algorithm has computed the depth to be the deepest near the shore and the shallowest
further off shore (where white
same area within Lake Tahoe
this algorithm to the Secret
is
it is
land).
Comparing
this to
published soundings of the
seen that these results are incorrect.
Harbor
data, apriori
derive the applicable correlation coefficients.
variation within the substrate of the scene,
it
52
correctly apply
depth information would be needed to
However, due
would be
correlation coefficients that apply to the entire scene.
be incorrect.
To
to the large
amount of
difficult to establish
any solid
Therefore depth results would
still
DERIVING DEPTH WITH MODELED BOTTOM TYPES
VI.
As
a result of the discussion in the previous sections,
of information about the bottom type will
the Bierwirth et
al.
can be surmised that a lack
result in a depth error
(1993) model to a scene.
must be sorted
out.
wavebands of information
are
such as
available,
However, by taking advantage of
when
attempting to apply
Therefore, to compute accurate depth
results, substrate reflectance
instruments.
it
This
a difficult task
is
when
only a few
Landsat or other multispectral
in
the wealth of information available in a
hyperspectral data cube, sorting out the bottom types within a scene becomes
much more
feasible.
MASK CONSTRUCTION
A.
The
viewed
land,
HYDICE
in the
however,
the scene
scene of Lake Tahoe contains a large portion of land, as can be
bottom, right hand, corner of Figure 6.1.
is
The radiant information from
considered noise for the purpose of analyzing the water column within
and therefore should be removed prior
to
performing any significant analysis.
an
-
3>&&2>*
«.-^, -
?~ >* JF«^*~«%,'V
llfllllllUlll
Figure
6.
1
.
Lake Tahoe, 320 x 320
pixel data scene. (Displayed at
wavelength 0.5(am)
53
When
viewing a scene
at
wavelengths on the order of
the radiation that enters the water
out
(i.e.
.7
um
and longer,
virtually all
immediately absorbed and never makes
is
it's
of
way back
appears black), Figure 6.2. Hence, at these longer wavelengths, the land and the
water can easily by differentiated, and a mask of the land created, Figure 6.3 (land pixels
have been
set to black).
4**
Masked
Figure 6.2. Lake Tahoe, 320 x 320
Figure 6.3. Lake Tahoe
pixel data scene. (Displayed at
data scene. (Displayed at wavelength
wavelength
1
550 ran)
um)
A plot of the correlation within each waveband,
now shows what one would
that a large
Figure 6.4, for the masked scene,
expect for a scene that contains only water. Figure 6.4 shows
amount of information (high
wavebands around
-
correlation coefficient)
the blue-green portion of the spectrum (.4
information (low correlation coefficients)
spectrum and beyond
(
>
.6
is
um).
54
is
-
contained in the visible
.6
um) and very
little
contained within the red portion of the
HYDICE Data
£
10
o
10
-
0.50
0.40
0.70
0.60
Wavelength
0.80
0.90
1.00
(/i)
Figure 6.4. Correlation between data
points within each
A
principal
component
analysis
scene to extract significant information.
component bands, Figure
bands with very
little
wave band.
(PCA) can now be performed on
A plot of the eigenvalues of each
6.5, indicates a
the
of the principle
high degree of variance within the
information in bands 5 and beyond.
HYDICE - Principal Components
,7
Figure 6.5. Correlation between data points
within principal component space.
55
masked
first
few
This four order of magnitude decrease in correlation indicates the relative volume of
information contained
in
each transformed waveband.
Figure 6.6 shows the relative
weighting of the observed radiance data contributions to three of the
first
four
PC
bands.
HYDICE Lake Tahoe
0.2
0.1
o.o
,o»oo«"«
1
"'» u
-0.1
-0.2
-0.3
0.50
0.60
0.70
Wavelength
0.80
0.90
1.00
(/z)
Figure 6.6. Relative weighting of the
wavelength dependent data for a few
of the
The
first
radiance.
band, eigenvector
Bands
1
is
PC-bands. (Bands
1,3
& 4)
simply a weighted average of the data
-
roughly the total
3 and 4 include differences which highlight different scene elements.
Constructing
1.
,
first
Figure 6.7
is
Mask for Sandy Bottom Areas
an image of the
first
PC band which
allows easy distinction of
shallow water sand and shallow water rock. From this distinction, a mask of the shallow
water sand
is
constructed, Figure 6.8.
56
Figure 6.7.
PC Band
1
figure,
showing
Figure 6.8.
contrast between shallow water sand
sand
in
Masked shallow water
Lake Tahoe scene.
and rock
In
PC band
4,
displayed in Figure 6.9, deep water sand
contrasted from the surrounding rocks.
A
mask can be
is
the prominent feature and
constructed and added to that of
the shallow water for a total sand mask, Figure 6.10.
~v.
Figure 6.9.
PC Band
Figure 6.10. Total sand
4, highlighting
Tahoe
deep water sand and rock contrasts.
57
is
scene.
mask
in
Lake
Constructing Masks for Dark Areas
2.
Thus
far,
it
has been assumed that the dark areas, within the water scene, were
rocks, however, there are
two
distinct dark
areas as characterized by their different
radiance spectrum, Figure 6.11.
0.6
O.i
Wavelength
(//)
Figure 6.11. Contrasting Spectra from
dark bottom material.
The
solid line represents the spectra from the brighter of the
in the spectra
suggest that,
if
covered by different material.
the paper and the
two
the
two material
In fact, this
is
two
material.
The
are both rocks, then they are
what
will be
assumed
for the
difference
undoubtedly
remainder of
materials will simply be characterized as "bright rock" and "dark
rock".
Taking advantage of the large difference
in the
radiance around 550 nm, a
mask
can be constructed for the two different types of rocks within the scene, Figure 6.12a and
6.12.b.
This
is
done by removing
all
the data within the scene except for that of bright
and dark rocks, by applying the mask for sand.
58
(6.12.a.)
(6.12.b.)
Mask
and Dark rocks, (6.12.a and 6.12.b
respectively) within the HYDICE Lake Tahoe scene.
Figure 6.12.
The white
for Bright
areas in the scene are the resultant
mask
for each type of rock.
Composite of the Bottom Types
3.
Table
6.1 is a
summation of the threshold values and bands used
to determine the
different masks.
Table
6.1
.
Threshold values used to define different masks.
Mask
Min Threshold
Max Threshold
Shallow Sand
-13000.0
-3800.0
PC band
1
Deep Sand
5.0
2500.0
PC band
4
1000.0
10000.0
Water-Sand Masked
cube - band 36
.5
999.0
Water-Sand Masked
cube - band 36
Bright
Rock
Dark Rock
59
Band
As
a result of the different
mask
formation, the Lake Tahoe scene
composite of three different bottom types; sand
-
bright rock
-
now becomes
a
dark rock, Figure 6.13.
Figure 6.13. Composite of sand and rock
masks, (blue
rock, red
The construction of masks
for each
-
-
sand, yellow
-
bright
dark rock).
of these types of bottoms allows for an individual
analysis of each bottom type and then a reconstruction of the scene.
B.
MODELING DEPTH BY INCLUDING SUBSTRATE REFLECTANCE
Now
that the
different areas
within the scene can be characterized by the
reflectance of the underlying substrate, the
Chapter
III,
method of Bierwirth
et al. (1993),
presented in
can again be applied to the Lake Tahoe data. Flowever, including effects of
the substrate reflectance, Equation [3.26] will be utilized instead of Equation [3.27].
60
Estimating Substrate Reflectance
1.
The process of
in
grouping pixels of similar spectra. Once
by
advantage
taking
made
for
for
of
the
variability
To proceed with
classifications.
at
characterizing the different substrates,
what Bierwirth
et al.
this is
was
essentially an exercise
done, depth information can be derived
within
each
of
these
different
substrates
the application of Equation [3.26] an estimate
must be
(1993) refers to as the radiance of wet substrate material
no water cover (Ls described
in
Chapter
a depth of zero where the substrate
is
HI.).
would be determined
Ideally this spectra
wet but not covered with water. However,
in the
absence of an exact measurement of the spectra from each of the wet substrates, an
approximation can be made by taking near shore-values.
Rock Substrate
a.
The
areas within the scene that have been characterized as rock, both the
bright and dark, have smaller radiance values near-shore than in deeper water. This effect
is
due
to the dark material of the rocks reflecting little radiation, similar to a blackbody.
At shallow depths
the material
add
to the
is
this
dark material will resemble a blackbody more closely than
covered by a deeper layer of water
(i.
e.
The bulk water
when
reflectance will
water leaving radiance over dark areas of the scene). Consequently, the darkest
pixels needed to be determined in order to obtain a characteristic spectra.
the radiance values from the
making use of
the
histogram of
masked scene can be generated (Figure 6.14 and Figure
6.15) and, from the values within the
be located and averaged.
A
minimum
bin the pixel with
minimum
spectra can
This was done for both the bright rock and the dark rock, by
masks discussed
in
the previous chapter.
For the bright rock
approximately 5 pixels associated with a brightness level of around 1050 were selected.
For dark rock approximately 6 pixels associated with a brightness
were
selected.
61
level of
around 750
"
VHistoqram
c
10
'
'
of
Scene Values
for Briqht
Rock
'
J
'
I
10
Histogram
c
3
of
Scene Values
t
I
'
'
'
for
'
l
Dark Rock
i
'
1(T
1000
2000
4000
3000
200
400
Rodionce Bins
Figure 6.14. Histogram plot for determining
shallow water spectra for bright rock within
the
masked Lake Tahoe data cube.
Notice the difference
need
to treat the
two
in
600
800
1000
1200
Radiance Bins
Figure 6.15. Histogram plot for determining
shallow water spectra for dark rock within
the
masked Lake Tahoe data cube.
radiance values between the bright and dark rock, reiterating the
as different types of substrate.
The
resulting spectra are presented
below.
b.
In
Sandy Substrate
contrast
to
the
dark areas
in
the
scene,
the
area that
has been
characterized as sand has large near-shore radiance values that decrease with increasing
depth. Therefore, the best estimate of the wet sand spectra
several pixels with the highest spectra.
histogram of the radiance values as
is to
determine the average of
This was again accomplished by plotting a
in Figure 6.16.
For sand approximately 7 pixels with
brightness values on the order of 3100 were selected and averaged.
62
\-
,«5
10
10
istogram of Scene Values
4
-
<0
u
c
o
10
3
D
K
u
(J
O
V
*o
0>
7
10
2
A
.
~
-
E
V,
I
10
1
-
10°
,
1000
i
I
,
2000
U.I
3000
4000
Rodionce Bins
Figure
6.
1
6.
Histogram
plot for determining
shallow water spectra for sand within the
masked Lake Tahoe data cube.
Wet Substrate Reflectance
c.
The wet
substrate radiance's are plotted in Figures 6. 17. a, 6.17.b
6.17.C for wet sand, wet bright rock and wet dark rock respectively.
o^ce
(6.17.a.)
Figure
rock
6. 17.
(6.17.c)
(6.17.b.)
Average spectra of wet sand
(c).
63
Averoge Shallow-Water Dark Rock Rodionce
(a),
bright rock (b) and dark
and
The
solid line in each Figure represents the average of the various dotted spectra.
and dark rock have similar values from about
that the bright
dramatically from about
.5
-
is
-
.5
|Lim,
but differ
.6 fim.
In all cases the pixels
near the shoreline. This
.4
Notice
used to determine the substrate reflectance were located
the expected result as the water will be the shallowest near the
shore for each substrate type.
Although these values may not be exact for wet substrate
with zero water cover, they are probably as close as you can get without making ground
truth
measurements of each
substrate.
Depth Results
2.
Depth by Using Bottom Reflectance Compared
Using Bottom Reflectance
a.
to
Depth Without
Including the results of substrate reflectance the depth of water in the
three pixels used in Chapter
V
can
now be
calculated and
compared
same
to the results of
Section V.A.3.b.
Table
6.2.
Comparison of depth derived without
substrate reflectance
and with substrate
reflectance.
Data Point
Depth without
Shallow Water
23.8
Rocky Area
substrate
is
now
Az
as
was
3.2
m
6.2
m
1.9
m
R
s
a relative decrease in depth between the deep water and the rocky
observed. Previous results incorrectly showed depth to be larger over the
rocky substrate than over deep water.
error
Depth with
s
m
26.9 m
29.6 m
Deep Water
As would be expected,
R
in the
In addition, there
previous calculated depth.
64
These
is
no longer an inherent depth
results clearly indicate that to
must be included
correctly derive depth, the bottom reflectance characteristics
in the
calculation.
Using Substrate Reflectance
b.
Equation [2.26] can
the scene.
The
results
of
this
now
to
Calculate Depth for Entire Scene
be used to compute the depth
at
computation are displayed as Figure 6.18.
the published charted depth for Secret Harbor and
is
Depth Contour
Secret Harbor, Lake, Tahoe
1
1
_i
i_
'„'..'
300
'^.l^Jt-,..
'
.'^
'
'
i
!
J,
I.-..
—
200
o
in
?
-+-
100
-10.
1
200
00
300
Lines
6.
1
8.
Contour plot of derived bathymetry'
(including effects due to bottom reflectance).
65
Figure 6.19
is
provided as a comparison to the
calculated depth.
Figure
each pixel within
The dark box
6.19
is
curves.
6. 19.
depth.
From
in Figure 6.19 is roughly the
shown on a smaller
Published charted
Figure
NOAA( 1987).
same area
as in Figure 6.18,
however Figure
scale to get a better idea of the relative depth of the different
The red depth curve
(or the
yellow curve (or the top curve)
is
bottom curve)
in
Figure
6.
19
is
around 7 m. Similarly in Figure
curves are highlighted by a white outline.
The depth
around 4 m. and the
6.
18 the 4
m and 7 m
in Figure 6.19 decreases
in
accordance with the scaling bar to the right of the Figure.
RELIABILITY OF ATTENUATION COEFFICIENTS
C.
Much of the dependence on
IQ
is
modeled.
concentrations,
Without
Ka was
the
accurate
truth
to
is
mg
m"
3
at the surface
66
for
well
chlorophyll
in the calculations.
For that
variation in chlorophyll will
The dynamic chlorophyll range
be .16
how
dependent on
measurements
was completed on how much a
effect the depth calculations.
al.
ground
most worrisome parameter used
reason, a brief error analysis
reported in Kappus et
accurate depth derivations
for
Lake Tahoe
varying to .26
mg
m'
3
at
was
35 m.
Therefore,
chlorophyll
HYDROLIGHT3.0 was
=
.26
mg
m"
of Kd values resulting
for these
two scenes
is
3
.
in
run once for chlorophyll
The depth was then
=
.16
mg
m" and once
for
calculated for the entire scene for each set
two separate depth scenes. The difference
in the
depth results
displayed in Figure 6.20.
*#*
4 j$?:
%
*-,*
u
&5
Q.20-
10
Figure 6.20. Variations in depth due
to variations in
As can be seen from
values.
the scaling bar to the right, the error averages around
goes no higher than 50%.
chlorophyll concentration
It is
Kd
1
0% or
so and
This indicates that the assumption of a relatively uniform
made
earlier will result in only a
mild error of depth estimation.
pointed out that the highest errors in the depth calculations result in areas that were
estimated to be bright rock.
rocky substrate that
is
This leads the author to believe that these areas are
covered with various amounts of algae.
in fact
The chlorophyll
concentrations within the algae then give rise to the higher depth estimation error reported
in
Figure 6.20.
67
68
SUMMARY AND CONCLUSIONS
VII.
High
water and low chlorophyll concentrations
altitude, clear
made Lake Tahoe
an ideal spot to begin to develop a method for deriving shallow water bathymetry from
hyperspectral data.
The scene of
Secret Harbor on the eastern shore of the lake provided
a clearly varying substrate type and bottom depth that proved to be a good test case for
deriving bottom depth.
scene,
it
difficult to fully access
is
The
depth.
However, given the
full
data set taken by
just south of Dollar Point,
interest to
how
relatively
close the depth derivations correspond to actual
HYDICE
on June 22
which has been charted
apply the methods developed
poor published soundings for the
in
nd
includes the western shoreline
much
greater detail.
in this thesis to this area
It
would be of
of the lake to get a better
estimation of error.
Atmospheric conditions were modeled by inputting relevant parameters into the
radiative transfer
model
MODTRAN3.5.
Similar methods to that of
were used to correct for atmospheric effects with similar
aerosol free conditions, as described in
Kappus
et al.,
Kappus
The
results.
et al.
(1996)
clear, virtually
allowed for a relatively straight-
As
forward modeling of the atmosphere above Lake Tahoe the day of the experiment.
result the derivation
A
results.
a
of water leaving radiance, Lw, was accomplished with excellent
marine boundary layer will introduce a
larger,
and more
difficult to
account
for, error.
The
clear water of
Lake Tahoe was assumed
purpose of the calculations
values to vary between .16
10%
in this thesis.
mg
m" and .26
Ground
mg
10%
in depth.
attenuation coefficient
made
to
HYDROLIGHT3.0 was
Kd given
be relatively homogeneous for the
truth
measurements revealed these
nrT resulting in an average error of about
across the scene for that difference in range.
homogenous chlorophyll concentration should
than
to
The assumption of a
therefore result in an average error of less
able to adequately
the clear water environment.
model water with much higher concentrations of
69
relative
model the values
However,
for
as attempts are
particulate matter,
it
will
become
increasingly
more
difficult to
model, and closer attention will need to be given to
thorough ground truth measurements.
As an
initial test
of the performance of the depth derivation method stated in
Bierwirth (1993), the radiance spectra was chosen from three separate pixels were
analyzed.
One
of these pixels was located in shallow water over a sandy substrate, one in
deep water over a sandy substrate and one over a rocky substrate
in relatively
shallow
water. Calculations resulted in a depth over the three different areas of interest resulted in
an erroneous report of depth over the dark rocky substrate with respect to the sandy
substrate. In addition,
these reasons,
each calculation resulted
was surmised
it
that
in a large offset error in actual depth.
substrate effects
would need
to
For
be included to
correctly calculate depth. This process has not been included in previous depth derivation
methods.
To
calculate depth based on substrate type, the scene needed to be divided into
A principle component analysis
different regions.
of sandy substrate.
Once
these regions were
were differentiated based on
was
easily
masked
off, the areas
spectral differences in selected
of dark and bright rock
wave bands.
This process
completed due to the wide selection of spectral characteristics available from
hyperspectral data.
No
resulted in the classification of regions
ground
A mask for each
of the three regions was created.
were available on the spectral characteristics of the three
truth data
defined substrates. Therefore, a simple program was developed to select and average the
most significant near shore values
for each
bottom
values were chosen and for both types of rock the
Depth was determined
The
values of bottom reflectance.
depth contour.
plot
a detailed
masked
three scenes
minimum
maximum
spectral values
spectral
were chosen.
region separately using the respective
were then added
to
form one composite
plot.
a result of the analysis of this thesis,
map
For sand, the
Very good agreement was observed between the derived depth contour
and the published contour
As
for each
type.
it is
concluded that
it
is
possible to derive
of bottom depth from remotely sensed hyperspectral data.
accomplished by the
fact that
This
is
bottom types are distinguishable form one another based on
70
variations within the hyperspectral data.
turbid coastal
By developing
similar techniques to survey
waters, information can be provided to the
targeted coastal landing zone.
war
fighter concerning
This can be accomplished with limited risk to
and military equipment.
71
human
a
life
72
LIST OF
REFERENCES
Anon, "Underwater Depth Determination", Photographic Interpretation Handbook,
Supplement No. 18, Photographic Intelligence Center, Division of Naval Intelligence,
Navy Department.,
1945.
Berk, A., Bernstein, L.
S.,
Robetson, D.
C, Acharya,
P. K.,
Anderson, G.
P.,
Chetwynd,
H., "MODTRAN Cloud and Multiple Scattering Upgrades with Application to
AVIRIS", Preliminary Summaries of the 6' Annual JPL Airborne Earth Science
Workshop, March 4-8, Vol 1. AVIRIS Workshop, Ed. R. O. Green, JPL, Pasadena CA,
J.
1996.
J., Burne, R. V., "Shallow Sea-Floor Reflectance and Water
Depth Derived by Unmixing Multispectral Imagery", Photogrammetic Engineering &
Bierwirth, P. N., Lee, T.
Remote Sensing. Vol.
Cassidy, Charles
J.,
Collins, Brian H.,
59, No. 3, pp. 331-338.,
March 1993.
"Airborne Laser Mine Detection Systems", September, 1995.
"Thermal Imagery Spectral Analysis", September, 1996.
Earth Observation Research Center (EORC), "Advanced Earth Observing Satellite
MIDORI", mentor.eorc.nasda.go.jp/ADEOS/index.html, November,
Elachi, Charles, Introduction to the Physics
Wiley
&
Sons,
Inc.,
New
-
1996.
and Techniques of Remote Sensing, John
York, 1987.
Gaskell, T. F., World Beneath the Oceans,
The Natural History
Press,
Garden
New
City,
York, 1964.
Hamilton, M.K., Davis, CO., Rhea, W.J., Pilorz, S.H., Kendall, L.C., "Estimating
Chlorophyll Content and Bathymetry of Lake Tahoe Using AVJJR.S Data.", Remote Sens.
Environ. 44, pp. 217-230, 1993.
Hyperspectral
Masint Support to Military Operations
Exploitation Operations Plan
(HYMSMO),
Jupp, D.L.B., "Background and Extensions to Depth of Penetration
Shallow Coastal Waters.", Symposium on Remote Sensing of the
Coast, Queensland, Session 4, Paper 2, 1988.
Kappus, M.E., Davis, CO., Rhea, W.J.,
coincident
AVIRIS and
Collection
and
(CEOP), 1996.
in-situ
"HYDICE
(DOP) Mapping in
Coastal Zone, Gold
data from Lake Tahoe: comparison to
measurements.", Proceedings of the SPIE
August 1996.
73
V.
2819,
Klein, Miles V., Furtak,
New
Thomas
E.,
OPTICS, Second
Edition, John
Wiley
&
Sons,
Inc.,
York, 1986.
Kidder, S.Q., Vonder Harr, T.H., Satellite Meteorology:
An
Introduction.,
Academic
San Diego, 1995.
Press, Inc.,
Kramer, H.
Earth Observation Remote Sensing
J.,
-
Survey of Missions and Sensors.,
Springer- Verlag, Berlin, 1992.
Lyzenga,
D.R.,
"Shallow-water
multispectral scanner data.", INT.
bathymetry
J.
using
Remote Sensing,
combined
lidar
Vol. 6, No.l, pp.
1
and
passive
15-125, 1985.
Lyzenga, D.R., "Passive remote sensing techniques for mapping water depth and bottom
features.",
Applied Optics, Volume
McCurdy P.
Programmetry
Manual
17,
No.
3.,
pp. 379-383, 1978.
Photogrammetry: Application of Aerial
in the Compilation of Hydrographic Charts, H. O. Pub. No. 591,
Reprinted, June 1946, H. O. Misc. No. 9257, 1940.
G.,
of
Aerial
Mobley, CD., Light and Water: Radiative Transfer
Inc.,
in
Natural Waters, Academic Press,
San Diego, 1994.
Mobley, C. D.,
HYDROLIGHT 3.0
NASA, Oceanography From
Users' Guide, SRI International, 1995.
Space Portfolio, U.
S.
Government
Printing Office, 1986-
680-616, 1986.
NOAA,
Chart Number 18665, U.
S.
Department of Commerce, National Oceanic and
Atmospheric Administration, National Ocean Service, Washington D.
Pickard, G.L., Emery, W.J., Descriptive Physical Oceanography:
Pergamon
Press, Inc.,
New
C, Brown, W.
C., January 1987.
An
Introduction.,
York, 1990.
"The Measurement of Water Depth by
Remote Sensing Techniques", Report 8973-26-F, Willow Run Laboratories, The
Polcyn, F.
University of Michigan,
L., Sattinger,
Ann
I.
J.,
Arbor, 1970.
An
Robinson, M.A., Satellite Oceanography:
remote-sensing scientists, Ellis
Sandwell, D. T., Smith,
W. H.
Horwood
F.,
introduction for oceanographers
and
Limited, Chichester, England, 1985.
'Exploring the Ocean Basins with Satellite Altimeter
Data', www.ngdc.noaa.gov/mgg/announcements/text_predict.HTML,
74
November
1995.
Methods of Satellite Oceanography, University of California
Berkeley and Los Angeles, 1985.
Stewart,
R.H.,
75
Press,
76
INITIAL DISTRIBUTION LIST
Defense Technical Information Center
8725 John
Ft.
J.
Belvoir,
Kingman Road., STE 0944
VA 22060-6218
Dudley Knox Library
Naval Postgraduate School
411 DyerRd.
Monterey,
CA
93943-5101
Captain A. Legrow, Navy
TENCAP
..
Code N632, Rm. 5D773
The Pentagon
Washington,
DC
20350-2000
Commander Jelinek, Navy TENCAP
Code N632, Rm. 5D773
The Pentagon
Washington,
5.
DC
20350-2000
Richard C. Olsen, Code
PH/OS
.
Department of Physics
Naval Postgraduate School
Monterey,
6.
CA 93943-5002
Newell Garfield, Code
OC/GF
..
Department of Oceanography
Naval Postgraduate School
Monterey, CA 93943-5002
7.
Greg Pavlin, SITAC
1781 Lee Jackson Mem. Hwy.
Suite 500
Fairfax, VA 22033-3309
1
8.
Mark Anderson, SITAC
1
1781 Lee Jackson
Suite
Mem. Hwy.
500
Fairfax,
...
VA 22033-3309
77
.
9.
Ron Resmini, SITAC
1
1781 Lee Jackson
Suite
500
Fairfax,
10.
Mem. Hwy.
VA 22033-3309
Curt Davis,
NRL
Remote Sensing
Division,
4555 Overlook Ave.,
Washington,
1 1
DC
Code 72xx
SW
20375
Mary Kappus, NRL
Remote Sensing Division, Code 7210
4555 Overlook Ave., SW
Washington, DC 20375
12.
LT Doug
Stuffle
1460DiBlasiDr.
Las Vegas,
NV
891 19
78
3
483NPG
2L34
TH
10/99 22527-200
DUDLB
NAVAi.
.x
LIBRARY
RADUATES- OOl
MONTERcY CA 939^01 00L