AN ABSTRACT OF THE THESIS OF
advertisement

AN ABSTRACT OF THE THESIS OF
for the degree of
Kai-Ming Lei
in
Civil Engineering
Doctor of Philosophy
presented on
May 6. 1992
Title: Response of Equipment in Resilient-Friction Base Isolated Structures Subjected to
Ground Motion
Abstract approved:
Redacted for Privacy
Dr. A. G. Hernried
The response of lightweight equipment in structures supported on
resilient-friction-base isolators (R-FBI) subjected to harmonic ground motion and various
earthquake ground motions is examined. The equipment-structure base system is modeled
as a three degree-of-freedom discrete system (SDOF subsystems).
An efficient
semi-analytical numerical solution procedure for the determination of equipment response
is presented. Parametric studies to examine the effects of subsystem frequency (isolator,
structure, equipment), subsystem damping, mass ratio, friction coefficient and frequency
content of the ground motion on the response of the equipment are performed. The
equipment response on a fixed-base structure subjected to ground motion is also
calculated. Friction type isolation devices can induce high frequency effects in the isolated
structure due to the stick-slip action. These effects on equipment response are examined.
The results show that the high frequency effect in the structure generated from a
friction-type base isolator doesn't, in general, cause amplifications in the response. The
R-FBI system appears to be an effective aseismic base isolator for protecting both the
structure and sensitive internal equipment.
RESPONSE OF EQUIPMENT IN RESILIENT-FRICTION BASE
ISOLATED STRUCTURES SUBJECTED TO GROUND MOTION
By
Kai-Ming Lei
A THESIS
submitted to
Oregon State University
in partial fulfillment of
the requirements for the
degree of
Doctor of Philosophy
Completed May 6, 1992
Commencement June 1992
APPROVED:
Redacted for Privacy
Professor of Civil Engineering in charge of major
Redacted for Privacy
DtHead of
partment of Civil Engineering
Redacted for Privacy
Dean of
Date thesis is presented
May 6,1992
Typed by researcher for
Kai-Ming Lei
ACKNOWLEDGEMENT
The author wishes to express his sincere gratitude to his advisor, Dr. Alan G.
Hernried, Professor of Civil Engineering for his guidance and reviewing the manuscript.
The author is also grateful to his parents and wife for their encouragement and support.
This research investigation was supported by the National Science Foundation under
Grant Number BCS-8920798. This support is gratefully acknowledged.
TABLE OF CONTENTS
Page
CHAPTER 1. INTRODUCTION
1
CHAPTER 2. MODELING AND GOVERNING EQUATIONS
6
CHAPTER 3. SOLUTION METHODOLOGY
10
LAPLACE TRANSFORM APPROACH
10
Harmonic Ground Motion
11
Earthquake Ground Motion
17
RUNGE-KUTTA APPROACH
27
CHAPTER 4. NUMERICAL STUDIES AND DISCUSSIONS
HARMONIC GROUND MOTION
29
30
Effect of Friction Coefficient
30
Effect of Damping
Effect of Frequency Content of Ground Motion
32
33
Effect of Mass Ratio
34
EARTHQUAKE GROUND MOTION
34
Effect of Friction Coefficient
Effect of Damping
36
Effect of Mass Ratio
37
CHAPTER 5. CONCLUSIONS
34
39
HARMONIC GROUND MOTION
39
EARTHQUAKE GROUND MOTION
40
CHAPTER 6. REFERENCES
73
LIST OF FIGURES
aga
Figure
1
The resilient-friction base isolator (R-FBI)
42
2
Structure supported on R-FBI
43
3
Equipment-structure supported on R-FBI
43
4
Effect of friction coefficient on equipment response versus period ratio
(me/ms = 0.01)
44
5
Fourier spectra of acceleration response of structure (p. = 0.01)
45
6
Fourier spectra of acceleration response of structure (p.= 0.02)
46
7
Fourier spectra of acceleration response of structure (g = 0.04)
47
8
Fourier spectra of acceleration response of structure (g = 0.06)
48
9
Fourier spectra of acceleration response of structure (p. = 0.10)
49
10
Effect of damping on equipment response versus period ratio
50
11
Effect of frequency content of ground motion on equipment response
(Te = 1.0)
51
Effect of frequency content of ground motion on equipment response
(Te = 0.04)
52
Effect of mass ratio on equipment respomse versus period ratio
(me/ms = 0.0001)
53
12
13
14
15
16
17
18
Effect of friction coefficient on equipment response versus period ratio
(El Centro SOOE)
55
Effect of friction coefficient on equipment response versus period ratio
(Taft S69E)
56
Effect of friction coefficient on equipment response versus period ratio
(Pacoima Sl6E)
57
Fourier spectra of acceleration response of structure (F-B) for
El Centro SOOE earthquake
58
Fourier spectra of acceleration response of structure (g = 0.01) for
El Centro SOOE earthquake
59
19
20
21
22
Fourier spectra of acceleration response of structure (p. = 0.02) for
El Centro SOOE earthquake
60
Fourier spectra of acceleration response of structure Oa = 0.04) for
El Centro SOOE earthquake
61
Fourier spectra of acceleration response of structure (1 = 0.06) for
El Centro SOOE earthquake
62
Fourier spectra of acceleration response of structure (p. = 0.10) for
El Centro SOOE earthquake
63
23
Effect of equipment damping on response versus period ratio (El Centro SOOE) 64
24
Effect of equipment damping on response versus period ratio (Taft S69E)
65
25
Effect of equipment damping on response versus period ratio (Pacoima Sl6E)
66
26
Effect of structure damping on response versus period ratio (El Centro SOOE)
67
27
Effect of structure damping on response versus period ratio (Taft S69E)
68
28
Effect of structure damping on response versus period ratio (Pacoima Sl6E)
69
29
Effect of mass ratio on equipment response (El Centro SOOE)
70
30
Effect of mass ratio on equipment response (Taft S69E)
71
31
Effect of mass ratio on equipMent response (Pacoima Sl6E)
72
RESPONSE OF EQUIPMENT IN RESILIENT-FRICTION BASE
ISOLATED STRUCTURES SUBJECTED TO GROUND MOTION
CHAPTER 1. INTRODUCTION
The design of earthquake resistant structures has become more and more important
in recent years. The traditional technique for designing the structures to withstand strong
earthquake excitations is to strengthen the structural members. Through these techniques,
however, the structures are very stiff, and therefore their fundamental frequencies may fall
into the range of high energy carrying frequencies of the ground motions. This will lead
to large acceleration responses in the structures and their internal equipment. An
alternative approach, aseismic base isolation, is to isolate structures from the ground
motion and hence to reduce the seismic response of the structure. This new design
methodology appears to have considerable potential in protecting the structures from the
damaging effects of earthquake ground motions.
A number of base isolation systems have been developed. In general, base isolation
systems can be classified in two categories: laminated rubber bearing type (LRB, NZ)
[1-6] and friction type (R-FBI, and others). The LRB system is made of alternating layers
of rubber and steel with the rubber being vulcanized to the steel plates. The LRB is rather
flexible in the horizontal direction but quite stiff in the vertical direction. The NZ isolator
is essentially the same as the LRB system with an additional lead core to provide energy
dissipation and to reduce the relative displacement of the base. In all of the laminated
rubber bearing systems with or without a lead core, the rubber carries both the lateral load
and vertical load. The above laminated rubber bearing isolation systems have been
extensively tested and implemented in such structures as nuclear power plants [7-11] as
well as a historic unreinforced masonry building [12].
2
In this study, attention is focused on a particular friction type system, the R-FBI
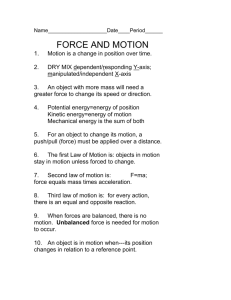
(resilient-friction-base isolator, proposed in 1983). The R-FBI is a relatively new system
[13-17] which decouples the vertical and lateral load carrying functions. It is composed of
a set of plates with a teflon sheet bounded to one side, a rubber core through the center of
the plates (with or without a central steel rod), and cover plates (see figure 1). The rubber
core distributes the lateral displacement across the height of the isolator and carries no
vertical load. The interfacial friction serves as a structural fuse as well as an energy
absorber. The plates will not slide for low level excitations. For higher level excitations,
the plates slide and the central rubber core deforms generating the elastic force which tends
to push the system back to it's original position. The advantages of the R-FBI are its ease
of fabrication as well as the fact that the vertical and lateral load carrying functions are
decoupled.
Preliminary laboratory tests of R-FBI bearings as well as computer
experiments have demonstrated the R-FBI's potential as an effective system for isolating
structures from ground motions [18-21]. An experimental program investigating the
seismic response of a five-story 1/3 scaled steel structure supported on a R-FBI system
has also been performed at the Earthquake Engineering Research Center, University of
California, Berkeley.
In aseismic design, it is necessary in the event of severe ground motions to protect
not only the primary structure but also lightweight components (equipment) that are
attached to the structure. Such nonstructural components may not only serve a critical
function, such as a piping system in a nuclear power plant, but may also be of substantial
cost as is the case with sensitive scientific equipment.
Conventional methodologies for the analysis/design of lightweight equipment in
structures subjected to seismic excitation are based either on ad-hoc or floor spectrum
(cascaded system) methods [22-25]. Since the ad-hoc approaches are not based on a
rational analysis of the problem, their reliability cannot be determined. Standard floor
3
spectrum techniques are based on a determination of structural response with the
equipment removed. The motion of the equipment support locations is then known and is
considered as the equipment excitation. Since the equipment and the structure are
decoupled, interaction effects between the structure and equipment are ignored. An
alternative approach for the determination of equipment response is a numerical integration
of the combined system equations. If several design alternatives were to be investigated,
this approach would be prohibitive from a computational standpoint. In addition, standard
numerical schemes may mask significant response due to the ill-conditioned nature of the
combined system property matrices involved.
Recent research has focused on the development of rational techniques which
include interaction effects for the determination of equipment response in structures
subjected to earthquake excitation. Several methodologies, based on either a deterministic
or a random vibration analysis, have been proposed [26-39]. These studies have shown
that floor spectrum approaches grossly overestimate the equipment response when the
system is tuned (one or more natural frequencies of the subsystems are equal or close to
each other). The new methodologies are computationally efficient since they are based on
the dynamic properties of the subsystems and a response spectrum associated with the
ground motion. A computationally intensive numerical integration of the combined system
is specifically avoided.
Some analytical studies have been performed to determine the response of a
single-degree-of-freedom (SDOF) equipment item attached to a multi-degree-of-freedom
(MDOF) structure which in turn is supported on a high damping rubber or the New
Zealand isolator and modeled as an equivalent linear system (i.e. a simple spring-dashport
model) [40-42]. An experimental investigation of the response of SDOF oscillators
attached to various floors of a MDOF building supported on elastomeric bearings with and
without a lead plug has also been performed [40]. The studies indicate that elastomeric
4
bearings without a lead plug may significantly protect internal equipment as well as the
superstructure. Elastomeric bearings with a lead plug appear to be less beneficial in
protecting the lightweight equipment attached to the base-isolated structure. A study on
the response of equipment in structures supported on a frictional isolation system
subjected to earthquake ground motion was performed by Ikonomou [43]. The isolation
system consisted of a laminated rubber sliding bearing. A comparative study of the floor
response spectra for a multi-story building with various base isolation systems was
performed by Fan and Ahmadi [44]. Although interaction between the primary and
secondary system is neglected in the floor response spectra study, interaction is included
in later studies by Fan and Ahmadi [45]. Recently an analytical and experimental study of
equipment response in structures supported on sliding bearings and helical springs [46]
was performed. In addition, a comparative study of response of a SDOF secondary
system in a base-isolated non-uniform elastic shear beam structure was also performed
[47-48].
Although the R-FBI appears to be a very viable system for protecting the
superstructure from strong ground motion, the slip-stick friction action can induce high
frequency effects [21]. These high frequency effects may adversely affect relatively
lightweight nonstructural components that are attached to the superstructure (i.e. sensitive
scientific equipment in buildings or a coolant piping system in a nuclear power plant), if
the resulting high frequency structural motions are of significant duration, intensity, and
energy content. Therefore, such effects should be carefully studied.
In this report, a discrete, SDOF subsystem shear-type model supported on R-FBI
subjected to harmonic ground motion and various earthquake ground motions is studied.
The governing equations and the criteria for transition between different phases of motion
are described. There are two phases of motion to be considered: a non-sliding phase and a
sliding phase. Closed form expressions are developed for the responses in each phase.
5
The transition between phases is determined numerically. This results in an efficient
numerical scheme to determine the response of the system. A standard numerical
integration scheme using Runge-Kutta method is also applied to check some of the results.
The peak acceleration response of the equipment is evaluated and the result is compared to
the fixed-base case. Parametric studies to examine the effects of subsystem frequency
(isolator, structure, equipment), subsystem damping, mass ratio, friction coefficient and
frequency content of the ground motion on the response of the equipment are also carried
out.
6
CHAPTER 2. MODELING AND GOVERNING EQUATIONS
Two shear-type models subjected to ground motion are investigated in this report.
The first model is a single-degree-of-freedom (SDF) structure (primary subsystem) resting
on the R-FBI (figure 2). The second model is a SDF equipment (secondary subsystem)
attached to a SDF structure (primary subsystem) that is supported on R-FBI (figure 3).
There are two types of ground excitations in this study: harmonic ground motion and
earthquake ground motion. Three earthquake excitations used in this report are El Centro
1940 SOOE, Taft 1952 S69E and Pacoima Dam 1971 S16E.
By applying Newton's Second Law to the equipment-structure-base system shown
in figure 3, the equations of motion governing the responses of the superstructure
(primary-secondary system) and the base are [20]
mi + ck + kx = -(§ + Rg)mr
(1)
2
.§ + 4 to s. + co s + j.tg skncs) + Ea. R. = -Y(
b
b
b
i=1 "
(2)
g
where s is the relative displacement between the base of the structure and the ground, x =
[xi] where xi is the relative displacement of the structure and the equipment with respect to
the base, kg is the horizontal ground acceleration, 11 is the friction coefficient, g is the
acceleration of gravity, and m = [mii], c = [9], k = [kii], i, j = 1, 2, represent the mass
matrix, damping matrix, and stiffness matrix of the superstructure, respectively. In these
equations, r is a unit vector, skn(s) is a sign function which is equal to +1 when i is
positive, and -1 when i is negative. The mass ratio oti is defined as
7
a=
ms
a2=
,
1
me
M
,
M = me +m +mb
(3)
where me, ms, mb represent the mass of equipment, structure, and base, respectively.
The natural circular frequency of the base, and its effective damping ratio are defined as
2
K
b
M'
03 =
C
b
2MC%
(4)
where C and K are the damping and the horizontal stiffness of the isolator.
Equations (1) and (2) are a set of coupled nonlinear differential equations. There are
two phases of motion: a non-sliding phase and a sliding phase. In each phase the system
is linear. The transition from sliding to non-sliding is determined numerically. In the
sliding phase, equations (1) and (2) govern the motion of the superstructure and its
isolator. It should be noted that since the sign function sg'n(s) in equation (2) doesn't
change sign in this phase, the coupled set of equations (1) and (2) are linear. When the
system is not sliding,
.s==.0
(5)
and the motion is governed by equation (1) with i = 0 only.
In a non-sliding phase the frictional force is greater than the total inertia force
generated from the superstructure-base mat system and therefore the friction plates are
sticking to each other. The criteria for transition from a non-sliding phase to a sliding
phase therefore depends on the relative values of the friction force and the inertia force of
the superstructure-base mat system. Therefore, the non-sliding phase continues as long as
8
2
+
g
co2 s+E
b
ak
< µg
(6)
= tg
(7)
1=1
As soon as the condition,
+
g
2
2
s + E a.
b
X.
1=1
is satisfied, sliding occurs and the direction of sliding at this moment of transition is given
by
2
k + 0)2
g
sgn
- (s)
+ Ea k
b
1=1
(8)
The sliding of the system in one direction may be terminated by a transition to a
stick condition, or it may continue sliding in the reverse direction. During the sliding
phase, whenever s becomes zero, the criterion,
'§
?2.t
inM
(9)
is checked to determine the subsequent behavior. If equation (9) holds, the sliding
continues with 4(i) taking the sign of s at the moment of transition; otherwise, the stick
condition occurs and equations (1) and (5) for a non-sliding phase control the motion [49].
The precise evaluation of the time of phase transitions is very important to the
accuracy of the response. A successive-time-step-cutting procedure is used to accurately
determine each of these transitions. If the difference between the left and right hand side
of equation (7) is less than 10-10cm/sec2, then equation (7) is assumed to be satisfied.
9
Similarly, ifs < 10-10cm/sec then it is assumed that s = 0, and equation (9) is checked for
the subsequent behavior. In this manner, the time of transition is accurately determined.
It is noticed that the phase change or reversal of sliding may occur more than once during
the relatively small time step used for digitization of earthquake excitations (0.02 sec).
This is due to the rapidly varying nature of the excitation that is characteristic of earthquake
ground motion. For this type of excitation, the search for phase transitions must be
performed extremely carefully. The rapid phase changes that can occur under earthquake
ground motions do not occur when the system is subjected to relatively smooth harmonic
ground excitations.
10
CHAPTER 3. SOLUTION METHODOLOGY
In this section, a solution technique using a Laplace transform approach is described
in detail. A standard step-by-step numerical integration scheme, the Runge-Kutta method,
is also presented. In general, a small time step for the standard integration scheme is
required to insure accuracy of the results. Such a requirement is computationally intensive
and may lead to accumulation of numerical errors. However, with the use of the Laplace
transform approach to solve the linear equations in each phase (sliding and non-sliding)
the numerical difficulties discussed above can be eliminated. The responses calculated by
the Laplace transform approach are exact in each phase and no numerical approximation is
involved. The criteria for locating the change in phase, however, must be performed
numerically. This approach is shown to be an efficient and reliable way of evaluating the
responses of the models discussed.
LAPLACE TRANSFORM APPROACH
The procedure to analyze the equipment-structure-base isolator system is
developed here. The structure -base isolator system can be done in a similar way. The
idea of this approach is to apply the Laplace transform technique in two phases as
discussed in the previous section. The formulations for the harmonic ground motion and
the earthquake ground motion are derived separately in this section. Since the earthquake
excitation is a known piecewise linear function and the system is linear in each phase, a
closed form solution for the response in each digitized interval of ground motion can be
obtained.
11
Harmonic Ground Motion
A. Non-sliding Phase
The governing equations for non-sliding phase are equations (1) and (5). The
harmonic ground motion is assumed to be of the form 5ig = a sin(2nt/Tg), where a is a
constant, Tg is the period of the ground motion. Introducing the excitation into equation
(1) and changing the time variables lead to
mk(t) + ci(r) + kx('t) = -mr a sin[cog (ti + t)]
where cog = 2n/Tg, 0 5 "E 5. (ti+1 - ti )
(10)
i = 1, 3, 5 t1= 0, t1 is the moment of
transition from sliding to non-sliding and t is the time variable (t = 0 at moment of
transition). Taking the Laplace transform of both sides of equation (10), one obtains
p
2
mT+ pa+ kV - (c + pm)x* - mi* = - mr a[
0) cos(0) t.) + p sin(co t.)
gi
g i
g
p2+ co 2
]
(11a)
g
where
xli
x
1
X
x2
(1 lb)
X*=
x21 2i
37 is the Laplace transform of x and p is the Laplace variable, x* and i* are the initial
displacement and the initial velocity at the beginning of this phase. Expanding equation
(11a) yields
12
(msP2 + el IP +
k1
1)
±ei2xtii
dxii
+ (e 1 2P + kl2)*- 2
1
a m s [cog cos(cog t.) + p sin(co t.)]
g
p
(e21P
k21)
(mep2
1
e22P
2
co
(12)
2
[(mep
k22)Tc 2
+ e22)x2i + Me3.(2i "21xli
a me [cog cos(wgti) + p sin(co
g )
2
p + co
(13)
2
Solving equations (12) and (13) for the transform response x1 and x2 leads to
2+c
A(m p
e
I
2
2
2
(I) ±N)RmsP +el
22p+k 22) -
B(c12 p+k12)
(14)
2
1P-Fkl 1)(meP +e221Y11(22)
(C12P+1(12)(e21P-Fk21)]
2
B(msp +ciip+ki 1) -A(c2 ip+k2
2
2
(p
+CO
2
2+c
)[(msp
(15)
2+c
p+k )(m p
11
22
e
p+k ) (c p+k )(c p+k
22
12
12
21
21
where
2
A [(msP + el dxli + msx li + e12x2i](P
2
B
r(rneP
e22)7(21 + Meic2i + e21x1iXP
+ cog) -a ms[cog cos(cog ti) + p sin(wgti
(16)
2
+ cog) -a me[cog cos(cog ti) + p sin(cogy1 (17)
The equations (14) and (15) give the solution in the Laplace domain. The solution
in the time domain is obtained by taking the inverse Laplace transform of equations (14)
13
and (15). Using the residue theorem one can write
=1, Res [i
x
x2 =
(p)ePt] =
Rlk
(18)
1
1
Res [X 2(p)ePt] =
(19)
R2k
In order to evaluate the residues in equations (18) and (19), one must obtain the
zeroes of the denominators in equations (14) and (15) - a sixth degree polynomial in the
transform variable p. The roots of the polynomial are determined numerically using the
IMSL library (specifically routine DZPLRC). After finding the zeroes of the denominator,
the residues are calculated by the following formulas
2
\rneP
R1k
p14111k(P
22)
Pk (p P1)(1) P2 XP P3
pv,
+ k12)\
121
P4 )(1)
Pt
p 5 )(p p 6 ) e
(20)
2
ciiP k11) A(c21P k21)
pt
Pk)(p P1)(P P2 XP P3 )(P P 4)(P p5 )(1) p 6 ) e
B(rnsP
R2 k
c22p
(21)
where pk (k = 1, 2, ..., 6) are the roots of the sixth degree polynomial. Then the response
is determined by equations (18) and (19).
It should be noted that the responses obtained from the above calculations are the
relative displacements of the structure and the equipment. The relative acceleration
responses of the structure and the equipment are
t
k1 = I Res [p2i1(p)es l =
R1k
(22)
14
k2 = I Res [p2372(p)ePt] =
(23)
R*
2k
B. Sliding Phase
The governing equations for the sliding phase are equations (1) and (2).
Introducing the excitation and changing the time variables t 4 (ti + t) results in
2
+
b
b
b
(ti+i -
g
j=1
mx + ci + kx = -mr
where 0
a. R. = a sin(w (t. + T))
s. + 0)2s + g skn('s)+
(24)
1
+ a sin(to (t + t))1
(25)
g i
), i = 2, 4, 6...., ti is the moment of transition from non-sliding to
sliding and i is a time variable (t = 0 at moment of transition). Taking the Laplace
transform of both sides of the above equations and simplifying leads to
( p 2+cob)si + *si +
(pxi + li
b
(00 cos(co,, t.)
+ oc (px
2
F a[ °
+X )+
2i
p
2i
°
+ p sin(co t.)
g
1
2
p + o)
j
2
(26)
g
2-,_(
MSP S \MSP
4.(
1p 1 1
1
n44.
(ne
rv4_r
-111-1i
Cl 21- -1 2/- 2
0.) cos(co t ) + p sin(ci) t.)
g11
a ms [ g
g 2i
2
p + co
g
-12-2i
(27)
15
)7,
24.
(
meP s
C21P+k21)'714-rneP
c221- 22/ 2
me(Psi+.si)+(ineP+c22)x2i+me5c2i+c21x1 i
o) cos(co t ) + p sin(to t )
a me r g
gi
g 2i
p + a) 2
(28)
1
g
sin(;) ands is the Laplace transform of s. Note that sgn(s) doesn't
where F =
change sign in this phase. The initial displacement and the initial velocity of the base are si
and si, respectively. Solving equations (26), (27), and (28) leads to
N1
(29)
N2
(30)
D
xl
N3
3(
2
=
(31)
D
where
D P(P2 6)))[(P2
+ 41) (i)bP
c11p
(°b2)(msP2
kl 1)(IneP2 +c22p
k22)
+a2m sp4 (c 21p +k21) + a1 me p4 (c 12p + k12)
4
2
a2meP (msP
(c12p + k
12
)(c
cl 113
kl 1)
2
21p
-
+ k )(p +
21
4
2
InsP (meP
b
b b p + CO2)1
c22p
k22)
(32)
16
N1
Al(msP2 ci iP
+ If *p3[oc
2(c 21p +
+ C $'1)3[cc
1(c 12p +
c22p +k22) (c21P
k11)(meP2
k21)
a
k
cc
12)
1
2
(mep2 + c
+ k 22)
22p
(msp2 + c p + k 11)1
173 *p[(p2
c22P
k22)]
C22P
k22) a2ineP41
(0b2)(menr 2
+ C *p[a2 m s p4 - (p 2 + 2
b
b
p + CO
2)(c
b
N3 = -A-*p2[m s (c21 p + k 21) - me(msp2 + c
* r
4
2
+ B pLa m p (p
+2,C.,.
e
2
+ C **PL
pi_(p
(P2
(33)
11
k12) ms(mep2
N2 A *P2 [me(c12P
kn)(ei 2P + k12)]
"b b
12
p + k )]
(34)
12
11p+ k 11)1
p + w)(c p + k )]
b
+ ;coo + cob2 )(msp
21
21
i) - al my4]
1p+
+
(35)
and
= [(p +
bb
(p2 (0;
+ a (px + li ) + a 2(px 2i + k21/j r
g
)s. +
(36)
+ F(p2 + cog) - a p [cogcos(wg ti) + p sin(cogti)]
*
B
= f_mjp
s.I +
3
I
+ (m p + c )x +
S
11
11
+c
S
x .](p2 + w2)
12 21
(37)
- a m skogcos(0) t ) +p sin(co
g i
C
= [me(P si
(rneP
g
C22)x2i
a m e [cogcos(co t.) +p sin(co
g
g
me*2
1( 2
c21x1P`P
(02\
wg'
(38)
17
The equations (29), (30), and (31) give the solution in the Laplace domain. Again,
the residue theorem is applied to calculate the inverse Laplace transform. The procedure is
exactly the same as described previously for the non-sliding phase.
Earthquake Ground Motion
A. Non-sliding Phase
The governing equations for non-sliding phase are equations (1) and (5). The
earthquake excitation is assumed to be of the form
xg =
gi
+ at
(39)
where kgt is the earthquake acceleration at time t, 0 5
Xgi is the earthquake
ti+1
acceleration at time ti and a is the slope between two consecutive digitized points of the
earthquake motion at times ti and ti+i. Introducing the excitation into equation (1) and
changing the time variables, one obtains
+ at)
kX(T) = -Mr (i
(40)
gi
Taking the Laplace transform of both sides leads to
2
p mT+ pc7 +
where
(c + pm)x* - mix
2
= - mr (=.1 +
p
A
P
2
(41a)
18
_X
[T
X
1
X=
,
2
11
(41b)
x
2i
77 is the Laplace transform of x and p is the Laplace variable, x* and ic* are the initial
displacement and the initial velocity at time ti. Expanding equation (41a) yields
(rnsP2 ± c 1 OD + k1 dic
+ (c1213 + k1 2)37 2
1
RmsP + C1 dxii + ins( ii + ci 2x2i1
ma(Rip + a)
(42)
P2
(c2IP + k21))7 1 +
(mep2
+
c22p
+ k2 2)7( 2
m
_
gP
[(mep + c2. 2)x2i + me3( 2i + c21 xli ]
a?+)
(43)
P
p2
Solving equations (42) and (43) for the transform response leads to
2
A(mep + c22p +k22) - B(c 2p + k12)
T
1
2
2
2
p [(map + c11p + k1 )(mep + c22p + k22) - (c1 2p + k1 2)(c2 p + k21)]
(44)
2
B(msp + c1 1p + ki. ) -A(c2 ip + k21. )
T2
2
2
2
P [(mai) + clip + kli)(111eP +
(45)
c22p
(c12p
+ k22)
+ k12)(c2113 +
k21)]
where
2
A RmsP + ci dxli + Ins* li + c 1 2x2iiP
-
ms(xgiP + a)
(46)
19
B = [(mep + c
)x
22 2i
+ m 5(2 + c
e
21
x
li
11)2
m e(Rgi.p + a)
(47)
The responses in Laplace domain are given by equations (44) and (45). In order to
obtain the responses in the time domain, one must take the inverse Laplace transform of
equations (44) and (45). Using the residue theorem one can write
(p)en = E Rlk
x = I Res [37
1
1
(48)
k
x2 =1, Res [T2(p)en = I R
k
(49)
2k
In order to evaluate the residues in equations (48) and (49), one must obtain the
zeroes of the denominators in equations (44) and (45) - a sixth degree polynomial in the
transform variable p. There are two zero roots. The remaining roots of the polynomial are
determined numerically using the routine from IMSL library. It is noted that there only
five residues need to be evaluated (four for the distinct roots and one for repeated root).
Therefore the summation in equations (48), (49) is from k=1 to 5. After the zeroes of the
denominator are obtained, the residues are calculated as follows:
a) for the distinct roots Pk (k=1,2,3,4)
A(mep2
R = lim (p-pd
1'
R
P-41)k
= liM (p-pk)
13-'1)k
1-
c22p
1- k22) Wci 2p + k12) Pt
e
(50)
msmep2 (I) Pi )(P P2 )(P P3 XP P4)
13011sP2
+ ciiP 4. kid A(c21P + k21) Pt
msmeP2 (I) P1)(1) P2)(1)
e
P3 XP P4)
(51)
20
b) for the repeated root
R15= lim
[(p p
(p)ept]
(52)
--[(p p5) x 2(p)e pt ]
(53)
p>p 5dp
5
)217
1
2_
R
25
p>p 5dp
Substituting equations (44), (45) into (52), (53) and simplifying the expressions, one
obtains
R15
xg
(m k
e 12
- m k 22) + a(meci - msc22)
s
k
a(ms k
22
11
k
22
-me k
12
-k k
12 21
)(c k
11
22 + c22
k
11
k
c12 21
-c 21 k12 )
(k k -k k 21)2
11 22
12
a(m k
k
12-m s 22)
k k
k k
e
11
22
(54)
12 21
I (msk21 me k11) + a(msc21 - meci
R25
k11 k
22
a(me k
-ms k
21
k12 k
)(c k
11
(k k
11
21
k
22 + c22 11
22
k
c12 21
k )
c21 12
-k 12k 21)2
a(m k
-m k
k k
-k
s 21
11 22
e 11)
k
(55)
12 21
The responses obtained from equations (48) and (49) are the relative displacements
of the structure and the equipment. The relative velocity responses of the structure and
equipment are calculated by
=
1
pt
Res [p-X- (p)e- ] =
1
Rik
(56)
21
i2 =
Res [p72(p)ePt] =
(57)
R2k
From equations (56) and (57), it is observed that there are only five distinct roots in the
denominator. The residues are given by the following formulas
2
A(mep + c22p + k22) - B(ci 2p + ki 2)
R1k= lim
(p p)
p>Pk
k msme(p - pi )(p - p2)(p - p3 )(p - p4)(p
2
B(msp + c p + k 11) - A(c
R
11
2k
= p>pk
Pk (p-p k ) msme(p - pi )(p - p 2)(p - p
3
2 1p
+k
p5 )
Pt
Pt
2 1)
)(p - p )(p p ) e
4
(58)
(59)
5
where k = 1, 2, 3, 4, 5. The relative acceleration responses of the structure and equipment
are given by
= I Res
Rlk
(60)
R**
2k
(61)
1
1
2
**
[p2 x (p)ep t] =
= I Res [p2T (p)en =
2
k
Since there are only four distinct roots in the denominator of equations (60) and (61),
only four residues need to be calculated;
2
R = lim (p
1k
P>Pk
mep + c22p + k22) B(c 2p + k12)
p
k )Am sine(P
Pi)(P P2 )(Pi P3 )(P
(62)
P4 )
22
2
R
B(msp +
**
p)
= lim (p
2k P--Tk
k
+ k 1) - A(c,_ _p
2, 1
)
+1(21-
rnsme(P P 1)(P P2 )(P P 3)(P -P4)
eP
(63)
where k = 1, 2, 3, 4. The summation in equations (60) and (61) is from k=1 to 4.
B. Sliding Phase
The motion of the sliding phase is governed by equations (1) and (2). Introducing
the earthquake excitation and changing the time variables leads to
2
+ gb(Obs + (Ob2 s +
a.
skn('s) +
mx + ci + kx = -mr
.
= - (Rgi + at)
+ at)
(64)
(65)
Sl
where 0 5_ t
(ti+i -
).
Taking the Laplace transform of both sides of the above
equations and simplifying gives
(p2 +2Cbwbp +wb)s +aip2x1 + cc2p2R 2= (p +
+ cc (px
2
2
m p s+(m p
s
s
2+c
p+k
11
1
2i
+X
+(c12p+k 12
F
2i)+ P
2
bcob)si +'si +ai(pxii +xli)
R .p + a
(66)
-
P2
= m (ps+§.)+(m p+c )x +m
+c x
s
i
s
11 li
s li 12 2i
.p+a)
s
g
P2
(67)
23
43,
meP s
c21P+k21)T 1+ \ meP
c22P
22) 2
mecic
Ine(PSi 4si)+(meP4c22)x2i+me5(2i4C21x1i
gP
p
+a
(68)
2
A
where F = -
sgn(s) ands is the Laplace transform of s. It should be noted that sg\n(i)
doesn't change sign in the sliding phase. The initial displacement and the initial velocity of
the base at time ti are si and si, respectively. Solving equations (66), (67), and (68) leads
to
1
(69)
N2
=
(70)
D
N3
2
=
(71)
D
where
D = p2[(p2 + 2C
2
b bp + cob Xm sp
2
4
2
+ c p + k )(m p + c
11
e
11
22p
+ k 22)
4
+ a2InsP (c21P + k21) + al meP (c1 2p + k12)
4
4
2
2
a2meP (msP + cl 1P 4. kl 1) al InsP (meP + c22p + k22)
- (c 12p + k
12
)(c
21p
+k
21
(02\ ]
vIm,2
.,
b bF
1)1
(72)
24
N1
A lonsP2
+B *2[
ki ixmeP2
k
(
+ C *p2 [a
N2
-F
1(c 12p
a 1(mep2 + c 22p + k 22)]
+ k 12) - a (msp2 + c
2
k12)
A- *P2 [me(c12P
+13*[(p2 +
)
b
b
k22) (c2IP k2 i)(ci 2P + k12)]
c22P
ms(mep2
11
p + k 11)]
k22)]
c22P
p + o)2)(m p2 + c p + k ) - cc2 m ep4]
b
22
22
e
(p2
n4
L 2 sr
N =76i*p2[m (c
s
3
21
(73)
(74)
k12)]
p+k21 )-me(msp2 +c 11p+k 11)]
meP4
(P2 + 2Cb(1)bP
+ -C *[(p2 + 2C co p + co2)(m p2 + c
b
b
b
k21)1
(1)b2)(c21P
s
11
p +k 11) a
1
(75)
m sp4
and
r
A *= L(p
+
B
C
ba)b)si +
i
+ al (px
+
li) + a (px
2
1
2i
+
2i
) p2
p+
Fp
(5
gip
(76)
r
= Lms(p si + *si) + (msp + ci i)xii + msic + c12x2ii p 2 - ms(xgip + a)
(77)
r
= Lme(p si + Si) + (mep + c22)x2i + mek2 + c21xii
(78)
li
*
+ a)
2
p2 me(kgip + a)
Applying the residue theorem to equations (69), (70) and (71), the relative displacements
of the base, structure and equipment are given by
25
s = I Res
x1 =
[T(p)ePt] =
(79)
Rsk
Res [(1(13)ePt]
(80)
R1k
x2 = / Res [X- 2(p)ePt] = I R
k
(81)
2k
The zeroes of the eighth degree polynomial [equation (72)] must be calculated to
obtain the residues in equations (79), (80) and (81). There are six distinct roots and one
repeated root and therefore seven residues need to be calculated. The residues are obtained
by the following formulas:
a) for the distinct roots pk (k=1,2,3,4,5,6)
N
R = lim (p - P)
sk
P-9Pk
1
k msme (1
al a2 )p
2(p
(82)
p 1)(p p 2 )(P P3)(1) P4 )(P
)(P P6)
5
N2
R = lim (p p,)
1k
P-313k
-a2 )P2 (1)
rnsine (1
(83)
P 1)(P
13
2
)(1)
P 3 )(P P 4)(P P5 )(I3
P6)
N3
R
2k
= lim (p p,)
PPk
m sm e (1 a1
2(P
2
(84)
P1)(1)
P2)(1) P3 )(P
P4)(1) P5)(1)
P6)
b) for the repeated root
R
s7
= lim
>p
p
2
p [(p - p7 )
7
s(p)e
pt
(85)
26
R
17
d[(p p
= lim
p )p7 d p
7
)
2_
x (p)e
2
lim d[(p - p ) x (p)e
R27
27
p-->p
7
dp
7
pt]
(86)
1
pt]
(87)
2
Expanding and simplifying the above equations results in
Rs7
R17
b
(F - z .) + 2aCb
-
3
C%
xg
(m k
e 12
-m k
s
22
k k
a(ms k
22 mek12
(88)
t
2
b
) + a(me c
22-
11
a
12
ms c 22)
k k
12 21
)(c k
11
(k k
22
11
k
k
22 + c22 11
-k
c12 21
-c21 k12 )
12k 21)2
a(m k
e 12
mk
s
22)
(89)
k11k22 -k12k21
.(m sk 21 meld ) + a(msc21 -me cll)
R27
k k
k k
11 22- 12 21
a(me k
-ms k
21
)(c k
11 22
22
11
-c k -c21 k12 )
12 21
a(msk21-m k
e 11)
k
(k k
11
+c k
22-k 12k 21)2
llk 22-
kl2 k
t
(90)
21
It should be noted that equations (89) and (90) for determining the structure and
equipment responses are exactly the same as equations (54) and (55) in the non-sliding
phase. Finally, in order to calculate the relative velocity and acceleration response, the
same procedure used for the non-sliding phase is applied to the sliding phase.
27
RUNGE-KUTTA APPROACH
In order to verify the accuracy of the previously developed solution approaches, the
Runge-Kutta numerical integration scheme is used. The governing equations, however,
need to be modified [49].
A. Non-Sliding Phase
Multiplying equation (1) by m-1, the result may be written as
-1
lkx -rkg
r
(91)
Applying matrix multiplication yields
1
2
=-
1
ms
(c
11
=- me (c21
k +c 12 2 +k11x +k12x2 )1
1
1
+c
22 2
+k21x1 +k22x2
g
g
(92)
(93)
Equations (92) and (93) are the explicit form used in the Runge-Kutta numerical
integration procedure. Equations (92) and (93) are then transferred into a set of first order
equations in a standard manner. The calculations are accomplished by calling IMSL
subroutine DIVPRK.
B. Sliding Phase
Multiplying equation (1) by m-1 and expanding the matrix equations leads to
28
1
(
2= me \C21x1
c22-2+k21x1
(94)
+ kg)
c125(2-1-k11x1 1-k12x2)
ms
kg)
k22x2)
(95)
Substituting equations (94) and (95) into equation (2) yields
= kg+ mb (2m sco ssi + ms (02x
)
s
a
(2C. co § + co2s + p.g sgAn(s ))
-b
b
b
(96)
where al, = mb/M. Substituing equation (96) into equations (94) and (95), it follows that
k=
1
ms
(c
11
1
+c
2x
+k
x
+k
x
)(2m sssi
to
+m
)
ss
i
12 2
11
12 2 mb
1
1
+ -L- (2
ab
b
§ + cos + gg sin(k))
k2 =- me(c211 +c22k2 +k21x +k22x 2 )1
1
2s
1
+ (2C. CO §+ CO
ab
b
(97)
b
b
+
1
mb
sssl
(2m (QC* + m
sin(s))
sCO s
x )
l
(98)
Equations (96) (97) and (98) are then transferred into a series of first order equations in a
standard manner. Again, IMSL routine DIVPRK is used.
29
CHAPTER 4. NUMERICAL STUDIES AND DISCUSSIONS
In this section, parametric studies to examine the effects of friction coefficient,
subsystem frequency (isolator, structure, equipment), subsystem damping, mass ratio and
frequency content of the ground motion on the response of the equipment are performed
and the results are discussed. The peak absolute acceleration response, (x..g + s + Z2)Imax,
of the equipment in structures supported on R-FBI (figure 3) subjected to a sinusoidal
horizontal ground motion and various earthquake ground motions are calculated by the
approach developed in section 3. In order to examine the effects of the slip-stick friction
action on the equipment response, the absolute acceleration time history of the structure
supported on R-FBI (figure 2) is also calculated. The Fourier spectra of this time history
is then determined and the equipment is tuned to peaks in this spectra.
Throughout this work, in order to assure the accuracy of the results, the time step of
the calculations is chosen such that
At
min [
T
T
T
20 ' 20
,
,
0.02
(99)
where Te, Ts, and T are the natural periods of equipment subsystem, structure subsystem,
and ground motion, respectively. For harmonic ground excitation, in general, a
computation time of 9 seconds (10 cycles of ground motion) is sufficient to obtain the
maximum equipment response.
However, there are some instances when this
computation time is insufficient; in these instances the duration of computation is extended
until the maximum equipment response is achieved. Furthmore, the amplitude of the
harmonic ground motion is 0.5g. The earthquake ground motions considered are the first
30 seconds of the Pacoima Dam Sl6E (peak acceleration 1.17g), El Centro SOOE (peak
30
acceleration 0.35g), and Taft S69E (peak acceleration 0.18g). The maximum equipment
responses are normalized with respect to the peak ground acceleration of the particular
earthquake.
HARMONIC GROUND MOTION
Effect of Friction Coefficient
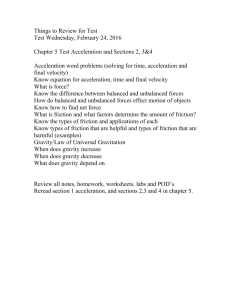
In the following, the effects of friction coefficient of the base isolator on the
response of the equipment are investigated. The results are shown in figure 4. In the
figure,µ is the friction coefficient, which varies from 0.01 to 0.1. The natural periods of
the structure (Ts), base (Tb), and ground motion (Tg) are 0.3 sec, 4.0 sec, and 0.9 sec,
respectively. The damping ratios and masses of the equipment , structure, and base are Ce
= 0.02, Cs = 0.02, bb = 0.08; and me = 0.01 kg, ms = 1.0 kg, mb = 1.0 kg, respectively.
One notices that the largest amplification occurs when the equipment natural period is
tuned to the period of the ground motion. Amplification also occurs when the equipment
and structure natural periods are the same (conventional tuning). In most instances the
R-FBI reduces the response of the equipment, and the smaller the friction coefficient the
greater the reduction. There are several exceptions, however, when the response of the
equipment in the isolated structure exceeds the equipment response in the fixed base
structure. This occurs at la = 0.1 and Teas = 0.5 0.8, 1.0; g = 0.06 and Teas = 0.6 -
0.8; as well as i.t. = 0.04 and Te/Ts = 07. For these particular systems, the stick-slip
friction action imparts significant energy into the structure which in turn is transmitted into
31
the equipment. There are also amplifications in the high period region Teas
12.0. At
Te./T, = 13.33 the equipment is tuned to the natural period of the isolator which yields a
resonance effect. Interation between the equipment and the base-isolator contributes to the
amplifications in equipment response in this region.
The amplifications in equipment response in the isolated structure due to the
stick-slip friction action can perhaps best be explained by examining the Fourier spectra of
the structure-R-FBI system alone (figure 2). The properties of the structure-R-FBI system
were obtained by removing the equipment for those systems where amplification in the
equipment response due to stick-slip effects occurred in the equipment-structure-R-FBI
system. The Fourier spectra of the structure acceleration response is presented in figures 5
through 9. The Fourier spectra are generated by first calculating the acceleration time
histories of the structure supported on the R-FBI and the applying the Fourier transform
technique. The structure response reaches a quasi-steady periodic state for computation
times greater than 18 seconds. After this time 12 seconds of structure acceleration
response are used as the sample for the IMSL Fast Fourier Transform routine FCOST.
The energy containing frequencies of the Fourier spectra of the structure response are
roughly located at (2n -1)fg, n = 1, 2, 3 ...., where fg = 1/Tg [49]. The lowest frequency
where a peak in the Fourier transform occurs is the frequency of the ground excitation and
the friction force generates peaks at higher frequencies. The three frequencies with the
largest magnitude in the Fourier spectra contain the most energy and therefore dominate
the acceleration response of the system. For frequencies higher than 10 Hz, the Fourier
amplitudes decrease rapidly. The magnitudes of the peaks in the Fourier spectra increase
as the friction coefficient increases. The three frequencies with dominant peaks are
appromimately 1.125, 3.375, and 5.625 Hz. When the frequency of the lightweight
equipment is tuned (equal or close) to one of these frequencies amplifications in equipment
32
response may occur due to a resonant effect. For example, an equipment frequency of
5.625 Hz, it is equivalent to the case of Te/Ts = 0.6 in the previous analysis and hence
amplifications in equipment response in the isolated structure occur. The peak in the
equipment response due to the stick-slip friction action that occurs at Teas = 0.7 is due to
the interaction between two of the dominant frequencies (3.375 and 5.625 Hz) in the
Fourier spectra of the structural response.
Effect of Damping
The effect of equipment damping on the response of the equipment in structures
supported on R-FBI subjected to harmonic ground motion are shown in figure 10. The
damping ratios of the structure and base are 0.02 and 0.08, and the damping ratio of the
equipment varies from small damping 0.02 to relatively large damping 0.1. Base friction
coefficients of 0.01 and 0.1 representing the two extremes of small and relatively large
friction, are considered. In addition, the natural period of the structure, base, and ground
motion are 0.3 sec, 4.0 sec and 0.9 sec respectively while the natural period of the
equipment varies. The masses of the equipment, structure and base are 0.01 kg, 1.0 kg
and 1.0 kg, respectively.
It is observed that the acceleration response of the equipment is reduced as the
damping ratio increases for both friction coefficients. The reduction in the peaks where
resonant amplifications occur is more prominent. This indicates that damping in the
equipment is an effective mechanism for reducing peaks in equipment response resulting
from either the stick-slip friction action or tuning. In the low period region (Teas
however, equipment damping does not noticeably affect the response.
0.4),
33
Effect of Frequency Content of Ground Motion
The effect of frequency content of the ground motion on the response of the
equipment are shown in figures 11 and 12. In figures 11 and 12, the equipment natural
periods of 0.04 sec and 1.0 sec representing relatively high and low frequency equipment,
respectively, were used. The remaining properties of the equipment, structure, and base
were those described in the previous section.
Figure 11 shows that there are two peaks in the fixed base response. The first peak
occurs at Tg/Ts = 1.0 (structure natural frequency tuned to the ground motion) and the
second peak is approximately at Tg/T, = 3.3 (equipment natural frequency tuned to the
ground motion). It is also seen that the isolated response increases as the period of the
ground motion increases. At Tg/Ts = 3.3 the response reaches its maximum value and for
Tg/Ts
9 the isolated response exceeds the fixed base response. In this region, the
frequency of the ground motion approaches that of the base isolator, thus causing
amplifications in response. The frequency of the ground motion is identical to the base
isolator for Tg/Ts = 13.33.
Figure 12 shows two peaks for the equipment response in the fixed base system
when the ground motion is tuned to the equipment and structure natural periods, i.e. Tg/T,
= 0.1333 and Tg/TS = 1.0, respectively. The isolated response increases slightly until it
reaches a peak at Tg/Ts = 0.7. After this peak, increasing the period of the ground motion
does not cause a large change in equipment response.
34
Effect of Mass Ratio
Figure 4 and 13 shows the effect of the equipment to structure mass ratio on the
acceleration response of the equipment. In figure 13, three friction coefficients (0.01,
0.04, 0.1) and the fixed base case are considered. The natural period and damping ratio of
each subsystem are the same as those used in the section on the effect of friction
coefficient. The masses of the equipment, structure and base are 0.0001 kg, 1.0 kg and
1.0 kg, respectively, which implies me/ms = 0.0001. In figure 4 the mass ratio me/ms is
0.01. From figure 4 and figure 13, it is observed that, for most systems, there is no
noticeable change in the equipment response as the mass ratio is reduced. When the
equipment natural frequency is equal to the structure natural frequency (VT, = 1.0), there
are amplifications in the equipment response as the mass ratio decreases (see table 1).
However, when the system is isolated, there is no noticeable change in the equipment
response as the mass ratio decreases. Significant amplifications in equipment response
occur as the mass ratio decreases for TIT, = 0.7, a system where a peak in the equipment
response results from the stick-slip friction action.
EARTHQUAKE GROUND MOTION
Effect of Friction Coefficient
The effects of friction coefficient of the base isolator on the response of the
equipment are shown in figures 14 through figure 16. In these figures, t is the friction
coefficient, which varies from 0.01 to 0.1. The natural period of the structure (T5) and
base (Tb) are 0.3 and 4.0. The damping ratios and masses of the equipment, structure and
35
base are Ce = 0.02, Cs = 0.02, Cb = 0.08; and me = 0.01kg, m, = 1.0kg, mb = 1.0kg,
respectively.
In this study, the maximum acceleration response of the equipment
supported on the fixed-base structure is also calculated for comparison. In order to
explain the amplifications in equipment response due to the stick-slip friction action of the
base isolator, the Fourier spectra of the acceleration response of the structure supported on
R-FBI subjected to the El Centro 1940 SOOE earthquake ground motion are examined.
The properties of the structure-R-FBI system are the same as the original system with the
equipment removed. The different friction coefficients are given in figures 17 through
figure 22.
From figures 14, 15 and 16, it is observed that the acceleration response of the
equipment has a sharp peak at Te/Ts = 1.0 for the fixed-base case. One notices from the
corresponding Fourier spectra (figure 17) that the dominant peak is located at a frequency
of 3.3 Hz which corresponds to the natural frequency of the structure. This indicates that
significant energy is transmitted into the structure at this particular frequency. When the
natural frequency of the equipment is tuned to the natural frequency of the structure (Te/T,
= 1.0), large amplification in equipment response occurs due to the resonant effect.
Figures 14, 15 and 16 show that for a wide range of frequencies (including the
tuned case Te/T, = 1.0), the R-FBI effectively reduces the response of the equipment as
compared to the fixed base system. It is noticed that the smaller the friction coefficient the
greater the reduction in equipment response. This effect can be seen from the Fourier
spectra of the structure response (figures 18-22). As the friction coefficient decreases, the
amplitude of the Fourier spectra and hence the amount of energy imparted into the
equipment decreases as well. For Te/Ts > 10.0, there is relatively little change in the
response of the equipment in the isolated system as compared to the fixed base case.
36
In order to illustrate the magnitude of the reduction in equipment response, consider
a typical friction coefficient (p. = 0.04) and the three ground motions Taft S69E, El Centro
SOOE, and Pacoima Sl6E. In the high frequency region ( Te/T, 5_ 0.3 ), the normalized
responses are reduced by factors of 3, 5, and 11 respectively. At tuning (Te/T, = 1.0), the
normalized responses are reduced by factors of 3, 6, and 18, respectively. This
comparison indicates that the R-FBI is extremely effective in reducing the equipment
response when the system is subjected to strong ground motions such as the Pacoima
S 16E record.
Effect of Damping
The effect of equipment damping on the response of the equipment in structures
supported on R-FBI subjected to various earthquake excitations is shown in figures 23, 24
and 25.
The damping ratios of the structure and base are 0.02 and 0.08, and the damping
ratio of the equipment varies from light damping of 0.02 to relatively heavy damping of
0.1. Base friction coefficients of 0.01 and 0.1 representing two extremes of small and
relatively large friction coefficients are considered. In addition, the natural period of the
structure and base are 0.3 sec and 4.0 sec respectively while the natural period of the
equipment varies. The masses of the equipment, structure and base are 0.01 kg, 1.0 kg,
and 1.0 kg, respectively.
It is observed that the acceleration response of the equipment is reduced as the
equipment damping ratio increases for both friction coefficients. The reduction in the
resonant peaks is more prominent. This indicates that damping in the equipment is an
effective mechanism for reducing peaks in equipment response resulting from either the
37
stick-slip friction action or tuning. In the low period (high frequency) region (Te/TS 5_ 0.2
), however, varying the equipment damping has no effect on the equipment response in
the isolated structure.
Figures 26, 27 and 28 show the effects of structural damping on the equipment
response in structures subjected to various earthquake excitations. The damping ratio of
the equipment is fixed at 0.02 and the damping ratio of the structure varies from 0.02 to
0.1. The remaining properties of the equipment, structure and base were those described
above.
It is noticed that the acceleration response of the equipment is significantly reduced
by increasing the damping ratio of the structure for Te/T,
2.0. For Te/T,
2.0, there is
no noticeable change in the equipment response as the damping in the isolated structure
varies.
Effect of Mass Ratio
The effect of equipment to structure mass ratio on the acceleration response of the
equipment for various earthquake excitations is shown in figures 29, 30 and 31. In each
figure, three equipment natural periods of 1.0 sec, 0.3 sec and 0.04 sec representing
relatively, low to high frequency equipment are used. The natural period of the structure
and base are 0.3 sec and 4.0 sec, respectively. The damping of the equipment, structure
and base are 0.02, 0.02 and 0.08, respectively. In addition, two friction coefficients 0.01
and 0.10 are considered.
It is observed that for Te = 1.0 and 'I', = 0.04 (equipment natural frequency detuned
from the natural frequency of either the structure or the base), and for both small and large
friction coefficients, the mass ratio has no noticeable effect on the equipment response for
38
the various earthquakes considered (figures 29
31).
For Te = 0.3 (equipment natural frequency tuned to the structure natural frequency)
and a small friction coefficient (.t = 0.01), varying the mass ratio has no effect, in general,
on the equipment response (figures 29, 30). However, figure 31 shows that the response
of the equipment increases as the mass ratio decreases. This is possibly due to the high
intensity ground motion associated with the Pacoima Dam record. For Te = 0.3 and a
relatively large friction coefficient (0.1) the equipment response increases as the mass ratio
decreases. From previous research on fixed base structures, when the system is tuned,
the amplification in equipment response depends directly on the mass ratio. The
equipment-structure-R-FBI system would behave like a fixed base equipment-structure
system if the friction coefficient in the R-FBI is infinitely large. For finite but relatively
large values of the friction coefficient, the system behaves more like a fixed base system
than if the friction coefficient is small. This explains the amplifications in equipment
response when µ = 0.1 that are absent when 1.1. = 0.01.
39
CHAPTER 5. CONCLUSIONS
The dynamic response of lightweight equipment in structures supported on resilient
-friction-base isolators (R-FBI) subjected to harmonic ground motion and earthquake
ground motion is investigated. The model is a SDOF equipment item attached to a SDOF
structure which is attached to a base mat supported on the R-FBI. The peak absolute
acceleration of the equipment is evaluated. An efficient semi-analytical numerical solution
procedure for the determination of equipment response is developed. Closed form
expressions for the response in each phase, sliding and non-sliding, are derived. The
expressions in each phase are exact, thus eliminating any numerical difficulties associated
with a standard numerical integration scheme. The transition from sliding to non-sliding is
determined numerically. A series of parametric studies is performed to examine the effects
of friction coefficient, damping ratio, mass ratio and frequency content of ground motion
on the response of the equipment. Based on the present results, the following conclusions
may be drawn:
HARMONIC GROUND MOTION
1. The R-FBI is effective in reducing the acceleration response of the equipment.
2. The variations of the friction coefficient of the R-FBI affect the equipment response. In
general, the smaller the friction coefficient, the greater the reduction in the response of the
equipment.
3. Equipment damping effectively reduces resonant effects.
40
4. The response of the equipment is affected by the period of the ground motion.
Amplifications in equipment response occur when the natural period of the structure,
equipment, or base-isolator are tuned to the period of the ground motion.
5. When the equipment natural frequency is tuned to the structure natural frequency,
amplifications in the equipment response occur as the mass ratio decreases for the fixed
base case. When the system is isolated, however, there is no noticeable amplification in
the equipment response as the mass ratio decreases. Significant amplifications occur in the
equipment response as the mass ratio decreases in systems where there is a peak due to the
stick-slip friction action.
EARTHQUAKE GROUND MOTION
1. The acceleration response of the equipment in structures subjected to earthquake
excitations is, in general, effectively reduced by the use of the R-FBI. The R-FBI is
extremely effective in protecting the equipment when the isolated structure is subjected to
severe earthquake ground motions.
2. Varying the friction coefficient of the R-FBI affects the equipment response. In
general, the smaller the friction coefficient, the greater the reduction in the response of the
equipment.
3. The damping of the equipment and the structure effectively reduces resonant effects.
The response of the equipment is reduced as the damping of the equipment and/or the
structure increases.
41
4. When the equipment natural frequency is tuned to the structural frequency,
amplifications in the equipment response occur as the mass ratio decreases for large
friction coefficients. When the friction coefficient is small, however, there is no noticeable
amplification in the equipment response as the mass ratio decreases. In addition, when the
natural frequencies of the equipment and the structure are detuned, the mass ratio has no
noticeable effect on the equipment response; in either isolated or fixed base structures.
(R-FBI)
isolator
base
resilient-friction
The
1.
Figure
Core
Rubber
Plates
Sliding
Plug
Rubber
Layers
Teflon
Plate
Plug
Rod
Connecting
Top
Steel
Bottom
Rubber
Central
Plate
Connecting
Gap
42
43
Figure 2. Structure supported on R-FBI
Figure 3. Equipment-structure supported on R-FBI
Fixed base.
µ =0.10
= 0.06
..................... ............
= 0.04
= 0.02
= 0.01
1
I
I
I
1
1
1
1
1
1
1
1
1
1
1
i
1
1
1
1
I
10
1
Period Ratio ( Ter l's )
Figure 4. Effect of friction coefficient on equipment response versus period
ratio (me/ms = 0.01)
1
1
100
30
25-
10
15
20
25
30
Frequency ( IIz )
Figure 5. Fourier spectra of acceleration response of structure Qi = 0.01)
35
30
25
(IS 20
10
20
Frequency (Hz )
15
25
30
Figure 6. Fourier spectra of acceleration response of structure (p. = 0.02)
35
50
45
40
U
(1)
bb
35
30
ba) 25
20
71,
1510-
50
I
0
10
-
20
Frequency ( IIz )
15
2I5
Figure 7. Fourier spectra of acceleration response of structure (p, = 0.04)
35
70
60
50
V
(I)
b° 40
30
20
10
ti
10
15
20
Frequency ( liz )
25
Figure 8. Fourier spectra of acceleration response of structure (.1. = 0.06)
120
100
co
60
4)
40
20-
o o.A4404
LA__
5
10
20
Frequency ( IIz )
15
25
30
Figure 9. Fourier spectra of acceleration response of structure (II = 0.10)
35
I
111111
1
I
1111111
1
1
111111
10
Period Ratio ( Tics )
Figure 10. Effect of damping on equipment response versus period ratio
100
100.00
Fixed base
0
4c7;
1 0. 0 0 =
= 0.10
al".5
g = 0.04
U
= 0.01
1.00
cra;
5
5
0.1 0 z
t.
O
0.01
I
0.1
I
IIIII
I
I
I
III!
10
1
Period Ratio ( Tgas )
100
Figure 11. Effect of frequency content of ground motion
on equipment response
(Te = 1.0)
100
Fixed base
8
0.10
10=
= 0.04
= 0.01
a)
....
E
0.
2
1
0.01
I
01
I
1
1
I
I
I
1
1
I
1
10
Period Ratio ( Tg/Ts )
i
I
1
1
1
1
1
1 00
Figure 12. Effect of frequency content of ground motion on equipment response
(Te = 0.04)
tct3
100 -
Fixed base
:><
0
= 0.10
10
= 0.04
a)
µ =0.01
U
U
Ri
.......... ....
CT
-
-
O
0.0 1
I
01
I
I-
111111
I
I
11[1111
10
1
I
I
IIIII
Period Ratio (Tea )
Figure 13. Effect of mass ratio on equipment response versus period ratio
(me/ms = 0.0001)
100
54
Friction
coefficient
Period ratio
Te/Ts
Max. acceleration (g)
me/ms = 0.01
Max. acceleration (g)
me/ms = 0.0001
Diff.
(%)
1-1,
0.01
0.04
0.10
Fixed base
0.7
0.392
0.614
56.6
1.0
0.241
0.243
0.8
3.0
1.075
1.091
1.5
0.7
1.220
1.996
63.6
1.0
0.878
0.887
1.0
3.0
1.925
1.955
1.6
0.7
2.404
2.836
18.0
1.0
2.188
2.212
1.1
3.0
3.792
3.846
1.4
0.7
0.984
0.988
0.4
1.0
1.656
2.251
35.9
3.0
14.077
14.063
0.1
Table 1. Effect of mass ratio on equipment response
100_
Fixed base
z
--=
)
1
(1
4.)
CT'
...- E
0.10
0.06
0
-
.....................................
1
\
A
µ =0.04
N
= 0.02
= 0.01
0.01
0.1
I
I
I
1111
1
1
I
i
f!
10
Period ratio ( Tc /Ts )
Figure 14. Effect of friction coefficient on equipment response versus period
ratio (El Centro SOOE)
`160
100=
Fixed base
= 0.10
= 0.06-
..............
......... ......
.....................
N. = 0.04
= 0.02
0.01
0.001
111111
0.1
T
I
T
I
1111
10
1
Period ratio ( Ter
)
Figure 15. Effect of friction coefficient on equipment response versus period
ratio (Taft S69E)
100_
Fixed base-
= 0.10= 0.06
........
.........
= 0.04
=0.02
µ = 0.01
0.001
1
01
1111111
1
1111111
10
111111
Period ratio ( Te/Ts )
Figure 16. Effect of friction coefficient on equipment response versus period
ratio (Pacoima Sl6E)
100
200
180160140
20-
00806040
20
0
0
10
15
20
Frequency ( Hz )
Figure 17. Fourier spectra of acceleration response of structure (F-B)
for El Centro SOOE earthquake
25
50
454035-
30-
25201510
50
0
10
15
20
Frequency ( Hz )
Figure 18. Fourier spectra of acceleration response of structure (1=0.01)
for El Centro SOOE earthquake
25
50
45
40
35
U
30
a)
25
-t7s
20
< 15
10
Frequency (
)
Figure19. Fourier spectra of acceleration response of structure (R=0.02)
for El Centro SOOE earthquake
50
45-
403530?)
" 25a.
20-
< 1510
10
15
Frequency ( Hz )
Figure 20. Fourier spectra of acceleration response of structure (g=0.04)
for El Centro SOOE earthquake
50
45-
40353025-
2015105
10
115
20
Frequency ( Hz )
Figure 21. Fourier spectra of acceleration response of structure (1.0.06)
for El Centro SOOE earthquake
25
10
15
20
Frequency ( I-Iz )
Figure 22. Fourier spectra of acceleration response of structure (11=0.10)
for El Centro SOOE earthquake
25
Period ratio ( Tc /Ts )
Figure 23. Effect of equipment damping on response versus period ratio
(El Centro SOOE)
100=0.02= 0.05
10=
= 0.10
= 0.10
a.
cr
cu
g
E
0.1=
= 0.02
cai
= 0.05
µ =0.01
vI
o
= 0.10
0.01
z
0.001
I
0.1
I
1111
1
I
111111
10
Period ratio ( T /Ts )
Figure 24. Effect of equipment damping on response versus period ratio
(Taft S69E)
10_
0
174
U"
i)
5
g
E
ea 0.1.
1:30
N
E
0.01=
0
0.001
I
0.1
I
1'111
1
I
I
I
TI11
10
1
T
Period ratio ( Tcf Es )
Figure 25. Effect of equipment damping on response versus period ratio
(Pacoima S16E)
I
TIII
100
10
-= 0.10
Cs = 0.02
0
Cs = 0.05
= 0.10
0
cd
.z
.....
... ........
g
cr
E
a) el)
Z;s = 0.02
al:
= 0.05
N
= 0.01
= 0.10
0
0.01
0.1
I
I
TI
I
I
11
I
F
III!!10
Period ratio ( Ten's )
Figure 26. Effect of structure damping on response versus period ratio
(El Centro SOOE)
I
I
I
ITT
100
100=0.02
Cs = 0.05
0
µ =0.10
8-1
10z
cs = 0.10
Q.)
0
0
cd
CN
tg)
?_<
= 0.02
"
Cs = 0.05
1.1 = 0.01
= 0.10
CI)
N
E
z
0.0010.1
1
1
I
I
10
Period ratio ( Te/T's )
Figure 27. Effect of structure damping on response versus period ratio
(Taft S69E)
1
III!100
10,
µ =0.10
Cs = 0.02.
= 0.05
Cs = 0.10 --A
c..)
1.
......................
crz
(I)
z
ba
0.1
=0.02
Cs = 0.05
g = 0.01
(s = 0.10
a.)
jN
0.01 .7
0
0.001
I
0.1
I
I
I
III
I
1
111111
10
Period ratio ( Teffs )
Figure 28. Effect of structure damping on response versus period ratio
(Pacoima S 16E)
100
c.
10
7
T=0.3
pi
're =
= 0.10
_
.,
1.0--
...
Tc =0.04
T = 0.3
II = 0.01
0.1
,
0.0001
,
1
1
1
ffr II
x
01
T=
c
1.0
TT =
0.04
.
.
.
\
....... _ .. .......... _
.....
0.01
Mass ratio ( me /ms )
Figure 29. Effect of mass ratio on equipment response (El Centro SOOE)
.....
01
100_
O
cs
U
....
10
T c = 0.3
E
re = 0.04
Ft = 0.10
cr tko
>,<
........
Te = 0.3
Tc = 1.0
= 0.01
T
1.0 _
= 0.04
(-1
C
E
........ .......
N
cJ
z
0.1
0.0001
1
1
11111
0.001
1
11111
0.01
Mass ratio ( m itn s )
Figure 30. Effect of mass ratio on equipment response (Taft S69E)
.
10
_
..
.. . ........
_._
Te = 0.3
........ _..
Te . 1.0
1
're = 0.3
T = 004
.
Te = 1.0-- \
11 = 0.01
\
're = 0.04-
.....
.............
0.1
0.0001
I
0.001
1
111111
0.01
Mass ratio ( me/ms )
Figure 31. Effect of mass ratio on equipment response (Pacoima S16E)
73
CHATER 6. REFERENCES
1.
J. M. Kelly, M. S. Skinner, and K. E. Beucke, "Experimental testing of an energy
absorbing base isolation system," Report No. UCB /EERC- 80/35, Earthquake Engineering
Research Center, University of California, Berkeley, CA 1980.
2. J. M. Kelly and S. B. Hodder, "Experimental study of lead and elastomeric dampers
for base isolation systems," Report No. UCBIEERC-81116, Eearthquake Engineering
Research Center, University of California, Berkeley, CA 1981.
J. M. Kelly and S. B. Hodder, "Experimental study of base isolation systems with
laminated Neoprene bearings," Bull. New Zealand soc. earthquake eng., 15, pp. 55-67,
3.
1982.
C. A. Kircher et al, "Tentative seismic isolation design requirements," ASTM,
PVP-V.127, Seismic engineering, recent advances in design analysis, testing, and
4.
qualification methods, pp. 493-499, 1987.
5.
R. L. Mayes et al, "Design guidelines for base-isolated buildings with energy
dissipators," Earthquake spectra, 1, 1, pp. 41-74, 1984.
6. J. C. Kariotis and R. D. Ewing, "Tentative guidelines for the design of buildings with
base isolators," ASTM, PVP-V.127, Seismic engineering, recent advances in design
analysis, testing, and qualification methods, pp. 501-510, 1987.
7. C. Plinchon and F. Jolivet, "Aseismic foundation systems for nuclear power plants,"
Proc. SMIRT, London, England, Paper No. C190/1978, 1978.
8. C. Plinchon, R. Guerand, M. H. Richill and J. F. Casagrande, "Protection of nuclear
power plants against seismic excitation," Nucl. technol., 49, pp.245-306, 1980.
9.
C. Rojahn (Ed.), Proc. ATC-17 seminar on base isolation and passive energy
dissipation, San Francisco, CA, 1986.
74
10. A. G. Tarics, J. M. Kelly, D. Way, and R. Holland, "Quality assurance and control
of fabrication for a high-damping-rubber base isolation system," Proc. ATC-17 seminar
on base isolation and passive energy dissipation, San Francisco, CA, pp. 455-464, 1986.
J. M. Kelly, "Recent developments in seismic isolation," ASTM, PVP-V.127,
Seismic engineering, recent advances in design analysis, testing, and qualification
11.
methods, pp. 381-385, 1987.
12. M. Walters and E. Elsesser, "Seismic base isolation of existing structures with
elastomeric bearings, ASTM, PVP-V.127, Seismic engineering, recent advances in design
analysis, testing and qualification methods, pp. 387-397, 1987.
13.
N. Mostaghel, "Resilient-friction base isolator," Report No. UTEC 84-097,
Department of Civil Engineering, University of Utah, Salt Lake City, UT 84112, 1984.
14.
N. Mostaghel, "Resilient-friction base isolator," Proc. ATC-17 seminar on base
isolation and passive energy dissipation, San Francisco, CA, pp. 221-230, 1986.
15. N. Mostaghel, M. Hejazi, and K. Khodaverdian, "Response of structures supported
on resilient-friction base isolator (R-FBI), Proc. 3rd U.S. natl. conf. earthquake eng.,
Charleston, SC, pp. 1993-2003, 1986.
16. N. Mostaghel and B. F. Flint, "Experimental evaluation of R-FBI bearing," Report
No. UTEC 86-089, Department of Civil Engineering, University of Utah, Salt Lake City,
UT 84112, 1986.
17. N. Mostaghel, M. Khodaverdian, and B. F. Flint, "Seismic response abatement of
power plants and internal components," ASTM PVP-V.127, Seismic engineering, recent
advances in design analysis, testing, and qualification methods, pp. 445-453, 1987.
18. N. Mostaghel and M. Khodaverdian, "Dynamics of resilient-friction base isolator
(R-FBI)," Earthquake eng. struc. dyn., 15, pp. 379-390, 1987.
19. G. Ahmadi and L. Su, "Response of a friction base isolator to random earthquake
excitations," ASTM, PVP-V.127, Seismic engineering, recent advances in design
75
analysis, testing, and qualification methods, pp. 399-404, 1987.
20. N. Mostaghel and M. Khodaverdian, "Seismic response of structures supported on
R-FBI system," Earthquake eng. struc. dyn., 16, pp. 839-854, 1988.
21. L. Su, G Ahmadi and I. G. Tadjbakhsh, "A comparative study of base isolation
systems," Clarkson University, 1988.
22. K. K. Kapur and L. C. Shao, "Generation of seismic floor response spectra for
equipment design," Proc. spec. conf struc. des. nucl. plant facil., Chicago, IL, 1973.
23. M. P. Singh, "Seismic design input for secondary systems," J. struc. div. ASCE,
106, pp. 505-517, 1980.
24. E. H. Vanmarcke, "A simplified procedure for predicting amplified response spectra
and equipment response," Proc. 6th world conf earthquake eng., III, New Delhi, India,
pp. 3323-3327, 1977.
25. M. Amin et al, "Earthquake response of multiply connected light secondary systems
by spectrum methods," Symp. seismic analysis pressure vessels piping components,
ASME, New York, 1971.
26. J. L. Sackman and J. M. Kelly, "Rational design methods for light equipment in
structures subjected to ground motion," Report No. UCB /EERC- 78/19, Earthquake
Engineering Research Center, University of California, Berkeley, CA 1978.
27. J. L. Sackman and J. M. Kelly, "Seismic analysis of internal equipments and
components in structures," Eng. struc., 1, 4, pp. 179-190, 1979.
28. J. L. Sackman and J. M. Kelly, "Equipment response spectra for nuclear power plant
systems," nucl. eng. des., 57, pp. 277-294, 1980.
29. A. G. Hernried and J. L. Sackman, "Response of secondary systems in structures
subjected to transient excitation," Earthquake eng. struc. dyn., 12, pp. 737-748, 1984.
76
30. A. G. Hernried and J. L. Sackman, "Tertiary systems," Earthquake eng. struc. dyn.,
13, pp. 467-479, 1985.
31. A. G Hernried and J. L. Sackman, "The two-degree-of-freedom equipment-structure
system," J. eng. mech. div. ASCE, 112, pp. 621-626, 1986.
32. A. G. Hernried and H. Jeng, "Dynamic response of secondary systems in structures
subjected to ground shock or impact," Eng. struc., 9, 1, pp. 19-26, 1987.
33. A. G. Hernried and K. S. Lau, "Dynamic Response of Secondary Systems in
Structures Subjected to Earthquake Excitation," Int. J. analy. exp. modal Anal., 3, 1, pp.
20-25. 1988.
34. A. G. Hernried and K. S. Lau, "Dynamic response of tertiary systems in structures
subjected to base excitation," Eng. struc., 10, 3, pp. 185-193, 1988.
35. A. Der Kiureghian, J. L. Sackman, and B. Nour-Omid, "Dynamic analysis of light
equipment in structures: response to stochastic input," J. eng. mech. div. ASCE, 109,
pp. 90-110, 1983.
36. J. L. Sackman, A. Der Kiureghian and B. Nour-Omid, "Dynamic analysis of light
equipment in structures: modal properties of the combined system," J. eng. mech. div.
ASCE, 109, pp. 73-89, 1983.
37. T. Igusa and A. Der Kiureghian, "Dynamic response of multiply supported MDOF
secondary systems," J. eng. mech. div. ASCE, 111, pp. 20-41, 1985.
38. M. P. Singh and L. E. Suarez, "Seismic response analysis of structure-equipment
systems with non-classical damping effects," Earthquake eng. struc. dyn., 15, pp.
871-888, 1987.
39. L. E. Suarez and M. P. Singh, "Eigenproperties of non-classically damped primary
structure and equipment systems by a perturbation approach," Earthquake eng. struc.
dyn., 15, pp. 565-583, 1987.
77
40. J. M. Kelly and H. C. Tsai, "Seismic response of light internal equipment in
base-isolated structures," Earthquake eng. struc. dyn., 13, pp. 711-732, 1985.
41.
H. C. Tsai and J. M. Kelly, "Non-classical damping in dynamic analysis of
base-isolated structures with internal equipment," Earthquake eng. struc. dyn., 16, pp.
29-43, 1988.
42. H. C. Tsai and J. M. Kelly, "Seismic response of the superstructure and attached
equipment in a base-isolated building," Earthquake eng. struc. dyn., 18, pp. 551-564,
1989.
43. A. S. Ikonomou, "Parasitic seismic response of equipment in base isolated structure
mounted on sliding bearings", ASME, PVP-v.127, pp. 405-411, 1987.
44. F. G. Fan and G. Ahmadi, "Floor response spectra for base isolated multi-story
structures," Report No. MIE-177, Clarkson University, NY 1989.
45. F. G. Fan and G. Ahmadi, "Seismic responses of secondary systems in base-isolated
structures," Report No. MIE-187, Clarkson University, NY 1989.
46. G. D. Manolis, G. Juhn, M. C. Constantinou and A. M. Reinhorn, "Secondary
systems in base-isolated structures: experimental investigation, stochastic response and
stochastic sensitivity," Report No. NCEER-90-0013, National Center for Earthquake
Engineering Research, State University of New York, Buffalo, NY 1990.
47. G. Ahmadi and L. Su, "Equipment response spectra for base-isolated shear beam
structures," Report No. MAE-222, Clarkson University, NY 1991.
48. Y. Chen and G. Ahmadi, "Stochastic earthquake response of secondary systems in
base-isolated structures," Report No. MAE-229, Clarkson University, NY 1991.
49. F. G. Fan, G. Ahmadi and I. G. Tadjbakhsh, "Base isolation of a multi-story building
under a harmonic ground motion a comparison of performances of various systems,"
Report No. NCEER-88-0010, National Center for Earthquake Engineering Research,
State University of New York, Buffalo, NY 1988.