Document 11656237
advertisement

GKSS 2001/23
Derivation of the
Photosynthetially Available Radiation
from METEOSAT data
K. Shiller
Derivation of the Photosynthetially Available
Radiation from METEOSAT data
Kathrin Shiller
Abstrat
Two dierent models, a Physial Model and a Neural Net, are used for
the derivation of the Photosynthetially Available Radiation (PAR) from METEOSAT data in the German Bight.
Both models are onstruted for the alulation of PAR in the German Bight
in terms of an easily aessible time series of PAR elds; advantages and disadvantages of both models are disussed.
A software pakage was generated in IDL for the realisation on the omputer,
its struture is motivated and physi bakground informations are given.
With slight modiations all programs an be applied for the alulation of
PAR for arbitary regions (but not over land).
A zip le ontaining all programs and lasses used, the tehnial html doumentation and this report an be obtained from
http://gfesun1.gkss.de/software/meteosat2par.
Ableitung der zur Photosynthese zur Verfugung stehenden Strahlung aus
METEOSAT Daten
Abstrat
Zur Ableitung der zur Photosynthese zur Verfugung stehenden Strahlung
(PAR) in der Deutshen Buht aus METEOSAT Daten werden zwei vershiedene
Modelle, ein Physikalishes Modell und ein Neuronales Netz, benutzt.
Beide Modelle sind darauf ausgelegt, PAR in der Deutshen Buht in Form
einer einfah zuganglihen Zeitreihe von PAR-Feldern zu berehnen; Vor- und
Nahteile beider Modelle werden diskutiert.
Zur Realisierung auf dem Computer wurde ein Programmpaket in IDL erstellt,
dessen Struktur motiviert wird und physikalishe Hintergrunde erlautert werden.
Alle Programme sind so angelegt, da sie sih durh geringfugige Modikationen eignen, PAR auh fur andere Gebiete (aber niht uber Land) zu berehnen.
Ein zip File aller benutzter Programme, Klassen, der tehnishen html Dokumentation und dieses Berihtes kann bei
http://gfesun1.gkss.de/software/meteosat2par bezogen werden.
2
Contents
1 Introdution
7
2 METEOSAT data Proessing
7
2.1 The METEOSAT System . . . . . . . . . . . . . . . . . . . . . . . . .
2.2 Software . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3 The Two Models for Deriving PAR
3.1 Physial Foundations . . . . . . . . . . .
3.2 The Physial Model . . . . . . . . . . . .
3.2.1 The Heliosat Method . . . . . . .
3.2.2 Software . . . . . . . . . . . . . .
3.2.3 Disussion of the Physial Model
3.3 The Neural Net . . . . . . . . . . . . . .
3.3.1 The Neural Net ffbp1.0 . . . . .
3.3.2 Disussion of the Neural Net . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
8
9
12
12
15
15
18
23
25
25
29
4 Analysis of the results for the German Bight
30
5 Summary
32
1 Introdution
The present work ame into being as a part of the `ENVOC: A New Perspetive of
the Oean' projet. Within this projet the work pakage 3:4 is onerned with the
development of a model whih determines the primary prodution using a ombination
of remotely sensed data from MERIS, ASAR, AATSR or AVHRR and METEOSAT.
An important input variable for eah Primary Prodution model is the Photosynthetially Available Radiation (PAR). The derivation of PAR in the `German Bight' from
METEOSAT data was the goal of the work presented here.
Sine the METEOSAT satellite views about 42% of the earth surfae the rst subtask was to generate a program whih allows to extrat only a subset of METEOSAT
data for a speied `region of interest' (roi).This program and some related auxillary programs will be desribed in setion 2 together with a brief introdution to METEOSAT
and the data format `OpenMTP'.
The next step was to onsider how PAR ould be derived from these `roi-les'. Two
dierent methods have been implemented, the usage of a so alled 'Physial Model' as
well as a Neural Net parametrization of PAR. Setion 3 starts with some physial foundations valid for both models. The Physial Model, its realization and its limitations
will be introdued, followed by the desription of the Neural Network parametrization
together with a brief introdution to Neural Nets. For both models a quality estimation
of the model used will be inluded.
Afterwards the results will be disussed with fous on the `German Bight', the region
of interest in the present work. For this purpose data of the day- and month means of
PAR in the roi will be used.
All programs for this work were written in `IDL' (Version 5:4) in objet-oriented
manner. All programs and their purpose will be illustrated in the respetive setion.
This will inlude motivations of the lass denitions as well as a desription of some
assoiated methods. A tehnial desription of all programs is provided online[1℄.
2 METEOSAT data Proessing
This setion is onerned with the extration of a subset of METEOSAT data for a
speied `region of interest' (roi). To do so, one rst of all has to deal with the struture
of METEOSAT image produts i.e. the `OpenMTP format'. This is done in the next
setion inluding an introdution to the METEOSAT servies. Afterwards the software
used for the extration and some auxiliary programs will be disussed in some detail.
7
2.1
The METEOSAT System
Image produts ontain the basi image data aquired by the Meteosat satellites. These
data are obtained every 30 minutes in three spetral wavebands. Sine the satellites
are in geostationary orbit, the overage is approximately hemispherial and entered on
the sub-satellite longitude rossing with the equator. The main satellite is loated over
the Greenwih meridian.
The imagery itself onsists of retangular arrays of 8-bit-image pixels. The satellite
is spin-stabilised, and the data are aquired at a rate of one image line per satellite
rotation. Eah time the satellite rotates, the radiation detetors for the various hannels
pan aross the earth 'horizontally' (i.e. eastwards), aquiring one line of data. Between
eah rotation, a stepping tilt mirror in the amera optis adjusts the position so that the
next line is oset 'vertially' (i.e. northwards) from the last. A total image is aquired
every 25 minutes. A ve minute retrae and stand-by period prepares the satellite for
the start of the next image, so that the image interval is 30 minutes. The interval is
known as `slot', and there are 48 slots in eah day of operations. Slots are numbered
from midnight so that slot 1 overs data aquired from midnight to 00:30 UTC.
Emissions in the following three spetral wavebands are deteted by Meteosat:
VIS: wavelengths in the range 0.5 to 0.9 mirons - showing reeted light in the visible
part of the spetrum,
IR: wavelengths in the range 10.5 to 12.5 mirons - showing emitted radiation in the
thermal infrared part,
WV: wavelengths in the range 5.7 to 7.1 mirons - showing radiation in the water
vapour absorption bands.
Data are aquired at two resulutions. In the Water Vapour (WV) and Infrared (IR)
hannels a omplete image onsists of 2500 x 2500 pixels. This gives a spatial resolution
of about 5 km at the subsatellite point. In the Visible (VIS) band, data are aquired
at twie this resolution.
Images are available in dierent data formats. All software desribed in this doument does apply for data in the `OpenMTP le format' only. The mahine level representation of bits and bytes used in the OpenMTP format follows the standard used by
UNIX/open systems arhiteture mahines. The open system representation uses the
IEEE standard for real number representation and ASCII enoding for harater data.
All OpenMTP les onsist of a variable number of logial reords of variable length.
This struture ontains three distint omponents:
Reord 1, ASCII le header. This ontains general information about the le in
ASCII format.
Reord 2, binary le header. Contains extensive binary format information on the
produt and its alibration.
8
Reords 3-N, image line data. The number of lines N of data depends on the han-
nel (see above). Eah image line is (NP+32) bytes in length, where NP is the
number of pixels per line.
Besides the image line data the produt informations are of great use as one will
see in the following setions. All informations presented here were taken from publiations of the `European Organisation for the Exploitation of Meteorologial Satellites EUMETSAT' [2℄[3℄.
2.2
Software
Before reading the image line data for the region of interest (roi) for a speied time
intervall one needs to hek whether the METEOSAT data are omplete and ontain
full disk retied data (due to the fat that a great amount of METEOSAT les has to
be proessed one has to make sure that they are uniform and leading to the same roi).
To do so, the auxiliary program `list bad files' is provided. The program heks
whether the list of les is omplete (i.e. 48 slots per day, 3 types of data (VIS, IR,
WV) per slot) by reading all the le names whih will give information about the date,
slot and type. In order to hek if all les ontain retied and full disk data the
program reads the ASCII-header of all les, in whih general informations are stored.
The ASCII-header provides the reord `Desription' (taking one of the values `Image
subarea' or `Full disk image') and the reord `ProessingPerf' (proessing performed on
the image `Raw Data' or `Retied Data') for this task. If one ore more les are missing
or ontaining `bad data' (i.e. `Image subarea' or `Raw data' ) the program will list the
date, slot and type of these les in a le named `list bad files.txt'.
The main program `OpenMTP2roi' reads the image lines belonging to the roi and
writes their roi parts together with an ASCII header (see below) into `roi-les'. For this
purpose a lass `OpenMTP file' was dened with several methods to all. In order to
determine the image lines of interest the user needs to speify a grid (i.e. a (south-west)
starting point (latitude and longitude) a step-width (in latitudinal and longitudinal
diretion) and the number of steps in (latitude and longitude). The so speied grid
(interpreted as ellipsoidal oordinates) is then onverted to a artesian grid and then
to pixel-oordinates, whih allow to adress roi.
Before produing the roi-les, i.e. running the main program, one should make sure
that the speied grid really leads to an image of the speied region (it was found that
the routines onverting geographial- to pixel oordinates work quite well when areas
around 0 latitude were hoosen and that errors of up to three lines or pixels oured
when the speied region is of latitude 50 degree). For this purpose the auxiliary
program `offset' is provided. With this program one an shift the resulting roi to
adjust it to the desired position. The framed subarea will be monitored and so an be
easily ompared (by viewing) with a geographial map of roi. When it oinides with
roi the so found oset parameters an be used afterwards in the main-program.
9
The objet oriented manner in whih the programs where written is espeially useful
sine the user has not to deal with large and omplex programs.1
Calulations whih are ommon to all les are done only one in the main program (i.e. the rst time one alls the appropiate method) whih makes it very fast.
Suh methods are the `OpenMTP file::grid' method whih alulates the artesian
grid speied by the users geographial grid input (see above) and the `OpenMTP file::
grid onvert' method whih alulates the orresponding pixel-oordinate (this method
atually runs three times, beause of the dierent image sizes of `.VIS' and the other
types (`.IR' and `.WV') leading to three sets of pixel-oordinates).
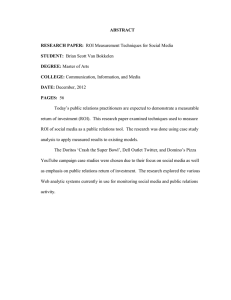
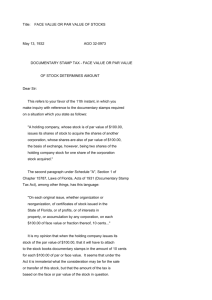
list bad files.pro
OpenMTP-files
offset.pro
OpenMTP2roi.pro
roi-les
Fig. 1:
filmhen.pro
The gure shows the data types and the programs designed for eah
type in a shemati way. Data types are harterized with the dis
symbol, programs are framed.
After alling these methods for the dened objet the main program will then extrat
the pixels assoiated with the roi in a le (named after date, slot and type of the original
input OpenMTP le). These roi-les also ontain an ASCII-header where information
ommon to all roi-les (speied grid, size of ASCII-header and size of roi-data) and
some astronomial values needed in order to alulate PAR are stored. Besides these
informations this header should ontain the alibration informations (but later on it was
found that the alibration informations were not present in the OpenMTP-les binary
header as they should, so month mean values of the alibration informations had to
be expliitly inluded in the programs whih needs them). The benet of the ASCII
header will beome lear when disussing the derivation of PAR from these roi-les. A
list of ontents of this header is given in the table below.
For the astronomial alulations a lass `roi al' was dened with methods assoiated with the region, date and time when data were taken but not with the roi
data themselves. Suh methods are: alulating sunrise- and sunset-time (in UTC)
1 At
this point it is worth mentioning that the above programs aept '.z' and '.gz' OpenMTP les,
so one should never unzip them.
10
Table 1: Contents of the roi ASCII header
`Region of Interest'
Spetral Content of (OpenMTP) image data
(`VISS + VISN (visible south +north) data')
Re1Size
Size of ASCII header in bytes, always set to `800'
Re2Size
Size of image in bytes
RetMethod
Name of retiation method used (OpenMTP)
NumberOfLines
Number of lines in the roi image (i.e. steps in Latitude)
NumberOfPixels Number of pixels in the roi image (i.e. steps in Longitude)
Longitude
Longitude of south-west starting point of roi
Latitude
Latitude of south-west starting point of roi
Delta Lon
step width in longitudinally diretion in roi
Delta Lat
step width in latitudinally diretion in roi
Earth Sun Dist earth sun distane (in AU)
os sun zenith osine of sun zenith angle in roi
sun azimut rad sun azimuth angle (in rad) in roi
diff angle rad azimuth dierene sun-satellite (in rad) in roi
os sun sat
osine of angle between sun and satellite as seen from roi
os sat zenith osine of satellite azimuth angle
CalibraCoeff
absolute alibration oeÆient (W=m2 ST R)
SpaeCounts
spae ount (dimensionless)
CopyRight
`Copyright () GKSS/GFE All rights reserved'
Desription
SpetralCont
(`roi al::sunrise sunset') , alulating the sun position vetor (`roi al::
sun position') i.e. Earth-Sun distane, zenith- and azimuth angle, and alulating the
azimuth dierene from sun and satellite (`roi al::azidiff sun sat'). The method
for alulating sunrise- and sunset-times is used in the main program for speifying the
number of les that should be onverted to roi-les in terms of `slots before (or after)
sunrise (sunset)' , e.g. for the onversion to PAR only those les with sunligth present
are of interest.
The so reated roi-les an now be used to alulate the PAR for the region of
interest. To get an idea how a series of suh roi-les looks like the auxiliary program
`filmhen' is provided, displaying a sequene of the speied les.
A summary of the software disussed in this paragraph an be seen in gure 1.
11
3 The Two Models for Deriving PAR
In this setion the two dierent models -the so alled `Physial Model' as well as the
Neural Net parametrization- for the derivation of PAR from METEOSAT data will be
introdued. First the physial foundations valid for both models will be layed. Afterwards the two models themselves and their omputational realization will be desribed.
For eah of the models a brief disussion of its sope and its error budget will be given.
3.1
Physial Foundations
The amount of `Photosynthetially Available Radiation' (PAR) is dened by
Z 700nm E0 (~x; )d [photons s 1 m 2 ℄;
PAR 400nm h
where E0 (~x; ), the spetral total irradiane, is the total radiant power per square meter
at wavelength oursing through point ~x owing to photons traveling in all diretions.
The term E0 =h in the above denition gives the number of photons generating E0 .
That means for photosynthesis it is the number of available photons rather than their
total energy that is relevant to the hemial transformation. This is beause a photon
of, say, wavelength 400nm, if absorbed by hlorophyll, indues the same hemial hange
as does a less energeti photon of wavelength 600nm.
Note that PAR is by denition a broadband quantity, there is no `spetral PAR'.
However, over a wide variety of surfae harateristis, the onversion fator for energy
to photons varies by only 10% about a onstant value (this approximation is valid
when not taking into aount the spetral dependane of the total irradiane). This
simpliation is also made in both models desribed in this setion, i.e. the global
irradiane will be derived from METEOSAT data and is onverted via a onstant fator
to PAR.
The global irradiane reahing the earth's surfae is on one hand depending on the
urrent position of the sun relative to the earth in spaetime and on the other hand
inuened by sattering and absorption proesses in the earth's atmosphere. Before
going into details about the atual applied models these two fators should be explained
briey.
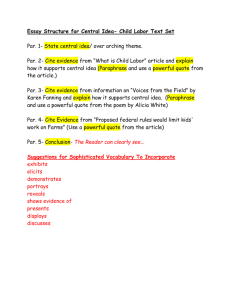
Figure 2 (taken from [4℄) shows a elestial sphere with the earth at the enter and
the sun revolving around the earth. In the elestial sphere, the elestial poles are the
points at whih the earth's polar axis uts the elestial sphere (mutatis mutandis for
the equator). The intersetion of the plane of the earth's equator with the plane of
the sun's revolution, the elipti, makes a xed angle of 23:5Æ . However, the angle
between a line joining the enters of the sun and the earth's equatorial plane hanges
every instant and is alled the delination angle.
The delination angle and the knowledge of the geographial position on earth are
suÆient to dene the sun zenith and azimuth angles, whih inuene the amount of
12
North Pole of
Celestial Plane
Plane of Celestial
Equator
Autumnal
Equinox
Delination
N
Angle
Earth
S
Apparent Path
of Sun on the
Elipti Plane
Summer
Solstie
23 5Æ
:
Sun
Vernal
Equinox
South Pole of
Celestial Plane
Fig. 2:
90Æ
The gure shows the elestial sphere with the apparent path of sun
and the sun's delination angle.
solar radiation reahing the top of the atmosphere (toa) of the earth. The zenith angle
is the angle between the loal zenith and the line joining the observer and the sun.
The solar azimuth is the angle in the loal oordinate system between the plane of
the observer's meridian and the plane of a great irle passing through the zenith and
the sun. Besides these two angles the amount of radiation reahing the toa of the
earth is inversely proportional to the square of its distane from the sun. Sine the
earth revolves around the sun in an elliptial orbit with the sun at one of the foi the
earth-sun distane is, as the delination angle, a funtion of the day in the year only2 .
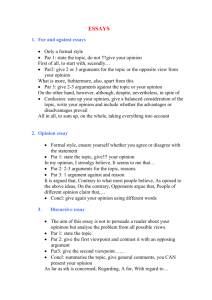
When solar radiation enters the earth's atmosphere, a part of the inident energy
is removed by sattering and a part by absorption (see gure 3, taken from [4℄). Both
inuene the terrestrial spetrum by onsiderably modifying the spetral energy passing
through the atmosphere. The sattered radiation is alled diuse radiation. A portion
of this diuse radiation goes bak to spae and a portion reahes the ground. The
radiation arriving on the ground diretly from the solar disk is alled diret radiation
(and is obviously proportional to the osine of the sun zenith angle).
The diuse omponent onsists of several parts. Besides the sattering by air
moleules and aerosols the interation of diret solar radiation with the louds results
in reeted diuse radiation. Further, a portion of the diret and the diuse radiation
reahing the earth after the rst pass through the atmosphere is reeted bak to the
2 The
mean earth-sun distane is alled one astronomial unit (AU). The minimum distane is about
0:98 AU, and the maximum about 1:02 AU. The earth is at its losest point to the sun (perihelion) on
approximately January the third and at its farthest point (aphelion) on approximately forth of July.
The earth is at its mean distane from the sun at 4th of April and at 5th of Otober.
13
Solar Radiation
reeted
bak to Spae
Limit of Earth's Atmosphere
Thin
Clouds
Aerosols
Clouds
Air
Moleules
Diret
Anisotropi Diuse
Radiation arriving
on a horizontal
Surfae
Fig. 3:
The gure shows the various proesses inuening the amount of radiation arriving on the ground.
sky, whih ontributes to the multiply reeted irradiane. This multiple reeted irradiane (not shown in gure 3) will depend srongly on the reetane properties of the
loud system. When the diretional intensity of the diuse irradiane is not uniform
over the sky hemisphere, it is alled anisotropi diuse radiation.
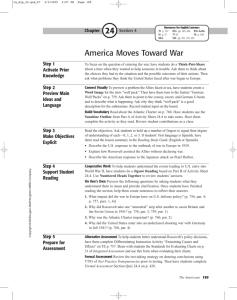
Loal Vertial
Sun
Satellite
Sun
Zenith
Angle
Dierene of
Azimuth Angles
Fig. 4:
The gure shows the position of the sun and a satellite in the loal
oordinate system of an observer on the earth's surfae
Before summarizing the minimum of input variables for eah model for deriving
the global irradiane from METEOSAT data one has to take into aount the satellite
itself. Sine the `observer', the satellite, is plaed in a geostationary orbit it has a xed
`viewing' angle onto the earth, i.e. it is never (or only one per day) inline with diret
omponent of the irradiane reahing a spei region on the earth. Therefore the
amount of irradiane deteted in the satellites radiometer (i.e. the reeted irradiane)
is a funtion of the angle between the satellite and the sun as seen from the ground (see
14
gure 4). (For the alulation of this angle the earth's urvature was not taken into
aount, sine our roi is suÆient small enough to do so.)
The above onsiderations are leading to the following set of input variables (besides
the satellite data themselves):
date and time when data were taken,
loation of the region of interest on earth (longitude and latitude),
earth-sun distane for the time the data were taken,
zenith angle of the sun in the loal (roi) oordinate system for the time the data
were taken,
zenith angle of the satellite in the loal oordinate system,
angle between the satellite and the sun as seen in the loal oordinate system for
the time the data were taken.
The physial informations in this setion were taken from[4℄ and [5℄.
3.2
The Physial Model
In this paragraph the physial model used for derivation of PAR is introdued. First
the model itself will be desribed briey. Afterwards the realization of this model on
the omputer together with some auxiliary programs will be visualized. At the end
there will be a disussion of the results and a quality estimation.
3.2.1 The Heliosat Method
The use of satellite-based methods for the retrieval of surfae solar irradiane relates the
earth radiane at satellite altitude to the radiative properties of the system and to the
top of the atmosphere solar irradiane. The satellite radiometer measures within a given
solid angle the radiation sattered bak to spae by the system `earth-atmosphere'. This
quantity is a measure of the planetary albedo and is reversely related to the atmospheri
transmission of solar radiation. Sine surfae solar irradiane is strongly determined by
the transmission harateristis of the atmosphere, there is a strong omplementarity
between global irradiane and the satellite signal.
The use of remotely sensed radiane data from satellites is well-suited to the task
of surfae solar irradiane estimation for two reasons. First, most of the solar radiation
reahing the earth's surfae originates from visible to near-infraread wavelength (
15
0:4 1:0m). Energy at wavelengths longer than 1:0m is almost totally absorbed
by even thinnest louds, and energy at wavelengths shorter than 0:4m is largely lost
due to moleular sattering and absorption by ozone. Seond, the louds are the main
modulator of the surfae solar irradiane, and they often an be observed easily from
spae. A high (low) value of net solar ux at the surfae is onsistently aompanied
by a low (high) value of loud optial thikness, and therefore a low (high) value of
reeted solar ux at satellite altitude.
Meteosat
Visible Counts
Normalization
Reetivity
Ground Reetivity
Cloud Reetivity
Cloud Index
Clear Sky Index
Clear Sky Model
(Dumortier/Page)
Global Irradiane
Clearness Index
Diuse Fration Model
(Skartveit et al.)
Diuse Fration
Diuse Irradiane
Fig. 5:
The gure shows the basi steps for the estimation of global irradiane
from METEOSAT data. Diuse irradiane is alulated by applying
a statistial model.
The various methods (e.g. [6℄, [7℄) presented in the literature mainly dier in the
desription of the relationship between atmospheri transmission and outgoing radiane
as seen by the satellite. Physial models diretly desribe the radiative proesses in
the atmosphere by means of radiative transfer alulations while empirial methods are
based on statistial relationships between satellite and ground measurements. However,
16
most operational methods, inluding the one used here, for the estmation of surfae
irradiane atually inlude elements of the other respetive onept.
The algorithms for retrieving global irradiane from satellite data where taken from
the paper by A. Hammer et al. [8℄ and is referred to as the Heliosat Method. It desribes
how to alulate the global irradiane from METEOSAT ounts in VIS. The method is
basially driven by the strong omplementary between the planetary albedo reorded by
the satellite's radiometer and the surfae radiant ux. The planetary albedo inreases
with inreasing atmospheri turbidity and loud over.
For a orret estimation of the hange in reetivity for a given image element the
inuene of the inoming radiation on the reeted radiation has to be onsidered.
Therefore a normalization with respet to the zenith angle of the sun is apllied. This
relative reetivity %
(C C0 )dist2
%=
Irrext os(#)
(where C0 is a registration oset, dist is the earth-sun distane in AU, Irrext is the
extraterrestrial solar spetral irradiane at mean earth-sun distane for the spetral
range of the visible METEOSAT detetor and # is the sun zenith angle) thus gives a
measure for the planetary albedo.
With the relative reetivities estimated in this manner a loud index n is derived
for eah pixel as a measure of loud over:
n=
% %g
% %g
where %g and % are the relative reetivities in the lear sky and overast ase, respetively.
To establish the before mentioned relationship between atmospheri transmission
and planetary albedo, a quantity haraterizing the transmittane has to be introdued.
In the paper [8℄ the lear sky index k is used, whih is a funtion of the loud index only
and is dened by the ratio of surfae global irradiane Ig to surfae global irradiane
under lear sky onditions Ilear (the latter one has to be inferred from a lear sky
model):
k =
=
Ig
Ilear
;
8
>>
<
>>: 2:0667
1:2
1 n
3:6667n + 1:6667n2
0:05
: n 0:2
:
0:2 < n 0:8
: 0:8 < n 1:1
: 1:1 < n;
so the surfae global irradiane an be alulated, if Ilear is known.
The lear sky model for alulating the global irradiane under loudless skies Ilear
is desribed as a sum of diret and diuse irradiane. For the diret omponent of lear
sky global irradiane a physial model is used [9℄, whereas for the diuse omponent
17
an empirial models is used [10℄. For both models the relevant parameters, besides the
earlier mentioned sun parameters Irrext ; dist; # are:
a side spei Turbidity TL (see table in [8℄),
the relative airmass m = (os(#) + 0:50572(96:07995ir
the rayleigh optial thikness
%R (m) = (6:6296 + 1:7513m 0:1202m2 + 0:0065m3
#)
1:6364
) 1,
0:00013m4) 1 .
With these parameters the global irradiane under loudless skies Ilear an be alulated
as follows
Ilear = Idir os(#) + Idiff ;
Idir = Irrext dist 2 exp( 0:8662TL %R (m)m);
Idiff = Irrext dist 2 (0:0065 + os(#)( 0:045 + 0:0646TL)
os2 (#)( 0:014 + 0:0327TL)):
In summary the global irradiane at the surfae an then be determined from the
lear sky index hareterizing the atmospheri transmittane and the lear sky irradiane. While the latter one is modeled with a site spei turbidity [11℄, the lear sky
index is derived via the loud index from the normalized satellite ounts (the relative
reetivities). A sheme of the proedure is given in gure 5.
The model presented here is limited due to the fat that METEOSAT ounts represent data integrated over quite a large spetral range. That means by denition
that the physial model parametrization an only lead to a mean representation of all
proesses atually depending on the inoming wavelength. Other fators determining
the method's unertainty are inuenes of louds, aerosols and surfae reetion whih
again are only haraterized by mean inuenes.
3.2.2 Software
After the desription of the physial model used its realization on the omputer will now
be disussed. Most of the underlying input parameters in this model are well-dened
physial values; only the relative reetivities in the lear sky and overast ase have
do be determined seperately from VIS ounts.
In order to proess the roi-les the lass `roi file' was dened. It provides several
methods inluding reading les (`roi file::file start', `roi file::header info'
and `roi file::read roi') and alulating the global irradiane. For alulating the
global irradiane the physial model was splitted into two parts, i.e. one method to
determine the relative reetivities (`roi file::reflet bytewise') and one method
(the atual physial model) whih uses the determined relative reetivities `roi file::
phys model bytewise'. This was done beause one rst has to determine the minimum
18
Fig. 6:
The gure shows an example of the output of the `reflet param'
auxiliary program.
(the above-quoted lear sky ase) and maximum (overast ase) value of the relative
reetivities whih then serve as parameters for the atual model.
In order to determine these two values the `reflet param' program was used. It
alulates the relative reetivities for all pixels whih are `above sea' from a number of
roi-les (one should make sure that the program uses roi-les from days with louds as
well as from those with lots of sunshine in order to get orret results) and plots them
afterwards. From this plot one an then determine the minimum and maximum value
and enter them in the `roi file::phys model bytewise' method. Figure 6 shows the
output of this auxiliary program for roi-les of Marh and July 1994.
Norderney, List data
DW Data linear.m
jebo read.m
time series data
Fig. 7:
Helgoland data
time series i. data
The gure shows the onversion of the supplied measured data into
data whih an be easily aest with `time series( i)' methods.
As mentioned above (see `Physial Foundations') the physial model is deriving the
global irradiane only. In order to determine PAR from global irradiane a onversion
19
fator has to be found. For this purpose one obviously needs a set of data of global
irradiane and PAR measured at the same site and time. These data were taken from
measurements (every ten minutes) for the year 2000 on Heligoland. The data an also
be used to test the models used and for the training of the Neural Net (see below). For
the year 1994 data from the `Deutsher Wetterdienst' of measurements of the global
irradiane (every hour) on Norderney and List were taken for the testing and training.
Fig. 8:
The gure shows an example of the output of the `glob2par' auxiliary
program for measurements on Heligoland of the year 2000.
roi-les
physmodel testing.pro
make mask.pro
time series data
time series i. data
Fig. 9:
physmodel testing.pro
glob2par.pro
The gure shows the auxiliary programs disussed in this setion together with the data they work on. Data types are hareterized with
the dis symbol, programs are framed.
The measured data were rst onverted into a time series with the help of two
MATLAB auxiliary programs `DW data linear' and `jebo read'. The rst one was
used for the `Deutsher Wetterdienst' data. Due to the fat that these data were nearly
20
omplete the missing values were derived by linear interpolation. For the latter one the
interpolation was not always possible (it was only done when not more than ve sequent
measurements were missing). Figure 7 shows the onversion of the data shematially.
Due to the diversity of the two sets of data two distint lasses had to be introdued
for reading out the data of the time series for a speied time, the lass `time series'
for Norderney and List data and the lass `time series i' (`i' for inomplete) for
the Heligoland data. For both of these lasses methods were provided for reading data
(not only salar type but also vetor- or grid-like) from the time series les (whih
have to have a ertain struture disribed in the header of the `time series::read'
(or `time series i::read') method) and for returning the value of `data' for a speied time (i.e. the methods `time series::value' and `time series i::value') by
interpolation.
Fig. 10: The gure shows an example of the output of the `physmodel testing'
auxiliary program for the Marh and June 1994 data.
The determination of the above onversion fator was done with the auxiliary program `glob2par' whih uses the measured data from Heligoland of PAR and global
irradiane. Within the program a linear orrelation of the two data sets is assumed so
that a onstant onversion fator is obtained by simple linear regression (assuming a
regression line through the origin). The output of the program are two les, one for
21
the regression line and values for the slope and its standard deviation. The other plot
gives the deviation of the values from this tted line. Figure 8 shows these two output
les, giving a onversion fator of 2:197(0:001)[ mol
W s ℄.
Before the atual alulation of PAR one should test whether the relative reetivities entered in the `roi file::phys model bytewise' method are well suited for
deriving the global irradiane for the region of interest. For this purpose the auxiliary
program `physmodel testing' is provided. It ompares the measured data of global
irradiane with the alulated ones. The program alulates the global irradine for
ve points (over sea) near the measuring station, looks up the orresponding measured
value and reates three les, one ontaining a satterplot of the aulated values vs the
measured ones; leading to a regression line, one ontaining a plot of the deviations and
one of the relative errors.
Figure 10 shows the output for the 1994 data (Marh and June). A summary of all
auxiliary programs will be given in gure 9.
If the output of the `physmodel testing' program was satisfatory (i.e. a mean
deviation lose to zero, a slope lose to one and a suÆient small standard deviation)
one an then run the main program alled `physmodel gridded'. The main program
alulates PAR (from the output of the `roi file::phys model bytewise' method via
the onstant onversion fator) for all points of the roi-les and writes the values into a
time series (inomplete, grid like type). Using this program is therefor espeially useful
for a series of roi-les. The so generated gridded time series an be easily aessed with
the `time series i' methods.
Fig. 11: The gure shows an example of the output of the `PAR means' program
for the month means of Marh 1994 (left) and the day means of Marh
4th 1994 (PAR is in mol
m2 s ). For both the region of interest is the
`German Bight' with the land overed by a mask.
These methods were used to reate another auxiliary program alled `lm gridded ts'.
It displays a `movie' of the PAR time series for an interval speied by the user who
an also adjust the speed and diretion of this movie interatively.
The reated time series of PAR was also used for alulations of day- and month
mean values of PAR in the roi. This is useful if the time series overs a range of a month
22
roi-les
physmodel gridded.pro
time series roi PAR
film gridded ts.pro
PAR means.pro
day-, month means pit
Fig. 12: The gure shows the data types and the main programs for deviation
of PAR with the physial model in a shematially way. Data types
are harterized with the magneti dis symbol, programs are framed.
or so and is done with the `PAR means' program. The program will reate a number
of output les, one of them ontaining a oloured plot of the deviations of the month
mean values of PAR in roi from the total month mean value (red orresponds to values
of PAR greater then the total month mean value, blue orresponds to a smaller one)
and the other ones (as many as there are days in this month) are the orrespondend
plots of the deviations of the day mean values in roi from the total day mean values.
(Note that the month mean was alulated as the mean of the day means, so it is atual
the mean day value and oinides with the month mean values if all days have the same
number of slots with sunshine.) For all of these plots only points in roi `above sea' an
be taken taken into aount sine the physial model used is valid only above sea. This
is reahed by using a `land-sea mask' reated with the `make mask' program from a roi
le with nearly no louds present in roi. Figure 11 shows an example of the output of
the `PAR means' program.
A summary of all programs diretly related to PAR is given in gure 12.
3.2.3 Disussion of the Physial Model
The Physial Model presented has the advantage that it is appliable to any region
overed by water; when hanging the region of interest the model by onstrution
produe results with the same quality. This is due to the fat that the model is based
23
on mean representations of the various variables the global irradiane depends on.
On the other hand the Physial Model has the disadvantage of having large errors
(see the satterplot (regression line) and the plot of the deviations in gure 10). The
origin of the errors should now be disussed in more detail. In the satterplot a large
amount of points is lose to the origin. These points are assoiated with sunrise or
sunset, i.e. with a small amount of global irradiane. On sunrise and -set the angle of the
inoming irradiane is lose to , the path through the atmosphere is of maximum length
and the earth's urvature has non-negletible inuene on the path length. Within the
model the urvature is not taken into aount, so it is not surprising that most of these
points have overestimated global irradiane. In the plot of the relative errors in gure
10 these points are assoiated with the large positve deviations from 200 to 400 %.
Anyway, these points are not orrelated with the asymmetry of the deviations in
the above gure, i.e. the width of the distribution is bigger for underestimating then
for overestimating the global irradiane. In order to nd the origin of that the Physial
Model was tested again, but this time with only one day with sunshine (1.6.1994) and
afterwards with only one day with an overast sky (28.3.1994) (for this purpose an
auxiliary program `disussion phys' was written whih is just a modiation of the
`physmodel testing' program). The testing was done by plotting a satterplot of the
model returned values vs the ground measured ones (again the data from the `Deutsher
Wetterdienst where used) together with the regression line from gure 10. Additionally
the values for the two sites (Norderney and List) are haretarized with two dierent
symbols. The output an be seen in gure 13.
Fig. 13: The gure shows the testing of the Physial Model for an overasted
day (left) and one with lear sky (right). The `x' symbolises points
from List the `4' points from Norderney.
In the plot for the lear sky ase it is remarkable that nearly the same amount of
alulated points is plaed above as is plaed below the regression line, i.e. this plot
leads to a symmetri distribution of the orresponding derivations.
On the other hand the plot for the overast ase shows an asymmetry: a large
24
amount of points is plaed below the line, i.e. the global irradiane is underestimated
very often. This might be explained by multiple bakreetane in the thin loud ase:
then the diret omponent of the global irradiane an still pass through these louds, a
part of it will be reeted onto the louds and from there bak to the surfae leading to
bigger then expeted value of irradiane on the surfae. These proesses are not taken
into aount in the model and may be the reason for the disussed asymmetry. In the
same plot one an also see that most of the points orresponding to overestimated global
irradiane originate from the same measuring site, i.e. above the line there are more
`rosses' (orresponding to List). This might be due to the fat that in the overast
sky the global irradiane is strongly depending on the site: when hanging the position
only by a few kilometers the value might vary drastially. Sine for eah measuring site
ve points lose to this site where hoosen for the test of the model this ould explain
the overestimating for only one site in a few ases and again the disussed asymmetry.
In summary the Physial Models performane is, as expeted, better for the lear
sky ase than for the overast one due to the omplexity of the proesses in this ase.
The advantage is the broad appliability of the model.
3.3
The Neural Net
Another way of determining global irradiae from METEOSAT data is the usage of
a Neural Net (NN) parametrization whih will be illustrated in this setion. The NN
`learns' from a training sample (ontaining a number of input variables as well as the
desired output, i.e. the global irradiane). The so trained NN an then be used for
the derivation of global irradiane from the input variables. The onversion to PAR is
done via the onstant onversion vator (see above). First of all the NN used will be
introdued.
3.3.1 The Neural Net ffbp1.0
Before desribing the Neural Network (NN) and its training briey, some general informations about NN should be given.
A NN is an interonneted assembly of simple proessing elements, neurons, whose
funtionality is loosely based on the animal neurons. The proseing ability of the
network is stored in inter-neuron onnetion strength, or weights, obtained by a proess
of adaption to, or learning from, a set of training patterns. Properties ommon to all
NN are:
NN's provide aurate, fast and onvenient mathematial (statistial) models.
25
NN's have apabilities for informational modeling of dependenies on more than
one variable.
NN's retrieve aurate algorithms.
NN's are a natural tool for multi parameter retrievals.
NN's an be fast forward models for diret assimilation.
NN's are robust in the presene of noise: small hanges in an input signal will not
drastially aet a neurons output.
Trained NN's an deal with `unseen' patterns and generalize from the training
set.
The program used in the present work `ffbp1.0' is a C-program by H.Shiller [12℄ for
training of feedforward bakpropagation NN, a multiple non-linear regression method,
running on UNIX omputers. Feedforward bakpropagation NN are the most frequently
used NN in remote sensing. `Feedworward' means that input values in the rst neuron
layer will be only propagated `forward', there are no bak onnetions whereas `bakpropagations' means that during the learning of the NN the desired output is ompared
with the NN output, the errors will be traed bak and the weights will be readjusted.
The learning funtion implemented is a gradient desent algorithm with momentum
term. The program allows for starting with a small net whih an be enlarged later if
neessary.
In the publiation `Feedforward-Bakpropagation Neural Net Program `ffbp1.0'
[12℄ the usage of this program is desribed in detail. Therefore in this doumention
there will be no desription of this program but the result of the training proess will
be presented.
For the training of the NN one needs to reate a training le in whih in eah
line a number of input variables is written as well as the desired output. The ouput
data where taken from measurments taken in Norderney and List of the `Deutsher
Wetterdienst' of 1994 on an hourly basis. Sine METEOSAT data are taken every
half an hour one has to have a program whih an interpolate from the `Deutshe
Wetterdienst' data for arbitary times. For this purpose again the lass `time series'
was used with one method for reading in the `raw' data (`time series::read') and a
method `time series::value' whih returns the interpolated value (see above, setion
`Software') for any given time (i.e. the time at whih the satellite sanned roi).
Input variables for the NN are:
the alibrated VIS, IR and WV ounts (i.e. radiane in Watts per square meter
and steradian)
the azimuth dierene (in rad) between Sun and Satellite
the osine of the sun zenith angle divided by the square of the Sun Earth distane
(in AU)
26
The last two values an be alulated from the parameters of the roi Asii header.
In priniple the alibration oeÆients for the three hannels an be taken from the
OpenMTP les binary header, but for the VIS hannel they are only available sine
1995. Details about where the atual alibration oeÆients were taken from an be
found in the tehnial desription [1℄.
In dierene to the `Physial Model' all three hannels available from METEOSAT
data serve as input variables. This is done beause some of the meteorologial properties an be `seen' on the IR and WV images. Suh properties inlude loud motion,
temperature, upper tropospheri humidity, lear sky radiane and loud top heights.
Due to the fat that these properties are modelled by their mean inuene in the `Physial Model' only, it is expeted that the NN works better and over a wider range of
spreading of the input variables.
To reate the training les (i.e. one le ontaining the input and ouput variables
as olumns ending with `.patt' and one le ontaining the names of all these variables
ending with `.dsp') the program `NN training' was used. From the roi-le it hooses
ve points lose to Nordernay and List whih are for sure `above sea'. A sheme of the
training proess is given in gure 14.
roi-les
time series data
NN training.pro
training-les
plot nn training.pro
ffbp1.0
Fig. 14: The gure shows the data types and the programs needed for the
training of the NN in a shemati way. The auxiliary program
plot nn training an only be run after the training of the NN. Data
types are harterized with the dis symbol, programs are framed.
From this training sample about 90% were used for training the NN and the remaining 10% for testing the NN-output. It was found that the training led to best results
when two hidden layers with 15 neurons in the rst and 3 neurons in the seond layer
for the NN were hoosen. Figur 15 shows the performane of the trained NN for the
test sample of the marh and june 1994 data, in whih the NN-output was ompared
27
with the `Deutsher Wetterdienst' measurements. Sine the NN program ffbp1.0 only
provides these plots for the test sample the auxiliary program plot nn training (see
gure 14) was used to obtain the plots for both, the testing and the training sample,
for easier omparing the output of the physmodel testing output (see gure 10) with
NN output. The values of errors of the so trained NN are:
trainings sample has a total sum of squares of errors: 106.758442,
ratio avg.train/avg.test= 0.864312,
average of residues: training 106.758442/13453/5= 0.007936
test 20.140849/2317/1= 0.008693.
Fig. 15: The gure shows the performane of the trained NN. In the upper left
part the regression line of NN-output vs desired output is shown. The
upper rigth part shows a plot of the orresponding deviations. Below
a plot of the relative errors is given.
The so trained NN was used to reate an easily aessable time series of PAR elds.
The NN is used in this ontext to extraploate pointlike measurements to enlarge the
area.
28
3.3.2 Disussion of the Neural Net
By omparing the performane of the Physial Model (see gure 10) and of the NN
(gure 15) it is obviously that the NN output has a muh smaller width in the distribution of the deviations from the tted regression line. Also this distribution does not
show the asymmetry present in the Physial Model. This is due to the fat that the
various proesses inuening the ouput in the overast ase an be taken muh better
into aount in a pure statistial model suh as a NN.
This statement an be prooven when running the NN for only one day with lear
sky and for one day with overast sky (for better omparison the same days as in
the disussion of the Physial Model where used). For this purpose the auxiliary program `disussion nn' was written whih is a modiation of the `plot nn training'
program. Again, the NN output was plotted vs the measured values as a satterplot
together with the regression line from gure 15. For the NN the output shows no asymmetry (i.e. muh more point above or below the regression line) neither in the lear
sky ase nor in the overast ase (see gure 16). The better performane for the lear
sky ase might be explained due to the strong site dependeny in the overast ase.
In the plot the asymmetry of one site (as for List in the testing of the Physial Model
performane) annot be seen. It is ommom to both models that the overast ase leads
to higher deviations than the lear sky ase.
Fig. 16: The gure shows the testing of the Neural Net for an overasted day
(left) and one with lear sky (right). The `x' symbolises points form
List and the `4' points from Norderney.
The disadvatage of the NN is that it an not be applied to any other region overed
with water beause the NN has only `learned' the optial properties for this speial
region of interest. Anyway, when supplied with ground measurements for any other site
another NN an be trained easily in the same manner as disribed above.
In summary one an state that the use of a NN for derivation of PAR should be
preferred to any Physial Model sine by onstrution a NN an take the various proesses determining PAR on a surfae muh better into aount then a non-statistial
29
model relying on averaged relations.
4 Analysis of the results for the German Bight
In the previous setions two dierent models for deriving PAR (via a onstant onversion
fator from the derived global irradiane) from METEOSAT data in a region of interest
(roi), here the `German Bight', have been introdued. Now the output of these models,
the Physial Model and the Neural Net (NN), will be disussed with fous on the roi.
For these purpose pitures of the month mean of Marh and June 1994 were alulated with both of the models. Figure 17 shows the output for the Physial Model and
gure 18 for the NN. In the gures the alulated mean value is always set to `white',
values of greater PAR are `red' and lower PAR is `blue'. Eah olour sale is dened by
the largest derivation from the mean value, i.e. in most of the ases only the maximum
(or minimum) of the olour sale will be atually used in the orresponding piture.
The mask used in the pitures not only overs the land but also small islands and the
tidelands between (this is why the mask does not look like the land on a map, but was
nesessary beause both of the models only work above sea).
Fig. 17: The gure shows the output of the `PAR means' program for the month
means of Marh 1994 (left) and of June 1994 (PAR is in mol
m2 s ) alulated with the Physial Model. For both the region of interest is the
`German Bight' with the land overed by a mask.
As expeted the ouput looks similar for both models used. The alulated PAR values for eah month are of the same order for both models and are a bit lower for the NN
output. In all ases the derivation from the mean value is of the same order (or bigger)
then the orresponding standard derivation when testing the model. Nevertheless the
error in the above pitures is muh less then these values due to orrelations from one
pixel to the neighbouring ones (i.e. the possibility of an error in alulating PAR for
a region with similar values of PAR is muh less ompared with the error on just one
single pixel in this region).
30
Fig. 18: The gure shows the same month mean values as gure 17 but this
time alulated with the NN.
Fig. 19: The gure shows the day means (alulated with the NN) for an overasted day (left, 28.3.1994) and one day with (nearly) lear sky (right,
1.6.1994). Again PAR is in mol
m2 s .
Another noteworthy fat is the struture present in all of the above pitures: lose
to the oast the month mean values of PAR are less then above sea, i.e. in the month
mean it is brighter above sea. At a rst glane this may look like an artifat. To
proof that this is not the ase gure 19 shows the day means of one day with nearly
no louds present and one day with an overast sky (for this purpose the same days as
in the disussions of the models were used). One an see that in both of the pitures
the above mentioned struture is not visible but that the value of PAR is nearly the
same in the whole region. The struture might be explained due to blushing on the
oast when old and humid airmasses from above the sea and warmer, dryer ones from
above the land `meet' in oastal regions. Anyway, it is obvious that for deriving any
parameters in roi whih depend on PAR (as the primary prodution in roi) one should
not use a mean value of PAR for the whole region.
31
5 Summary
The derivation of the Photosynthetially Available Radiation (PAR) in the `German
Bight' from METEOSAT data sueeded. From the data a subset orresponding to this
region of interest (roi) was extrated. For the atual derivation of PAR from ounts
in the roi-les two dierent models have been used, a so alled Physial Model and
a Neural Net (NN) implementation. Both the models alulate the global irradiane
whih is afterwards onverted via a onstant fator to PAR.
To test the quality of the models their output was ompared with ground measurements of the global irradiane (Norderney, List). From this it turned out that the NN is
better suited for the task for several reasons. It rst of all has a good performane independent of the weather onditions, whereas the Physial Model underestimates PAR for
an overast sky. Seond the Physial Model uses only the VIS ounts and desribes the
inuene of louds and other properties modifying the diuse omponent in an overast
ase only via their mean inuene whereas the NN extrats these informations from the
IR and WV ounts whih also serve as input values for the NN. The major advantage
of the Physial Model is the fat that it is appliable to any region overed by water,
by onstrution it will produe results of the same quality. If one wants to use the NN
in other regions it has to be `taught' for this region to aount for possible other optial
properties in this region.
The work presented here is a part of the workpakage 3.4. of the `ENVOC' projet.
This workpakage is onerned with the determination of the Primary Prodution in the
`German Bight', where PAR serves as an important imput variable. With respet to this
projet the most important results are: the value of PAR within this region utuate
so that the use of a mean value for PAR is not reommended. Therefore the values
of PAR for all points in the region are written into a time series whih an be easily
aessed for arbitary times in the range overed by the time series. Seond a robust
method for the derivation of PAR has been found: the use of the NN is reommended.
32
Referenes
[1℄ K. Shiller http://gfesun1.gkss.de/software/meteosat2par
Tehnial Desription available
[2℄ The Meteosat System - Satellites, Ground Segment, Missions, Global Coordination
EUM TD 05 Revision 4 (2000)
[3℄ The Meteosat Arhive - Format Guide No.1 - Basi Imagery, OpenMTP Format
EUM FG 1 Revision 2.1 (2000)
[4℄ M.Iqbal An Introdution to Solar Radiation
Aademi Press, 1983
[5℄ C.D.Mobley Ligth and Water - Radiative Transfer in Natural Waters
Aademi Press, 1994
[6℄ R.Frouin et al. A Simple Analytial Formula to Compute Clear Sky Total and
Photosynthetially Available Solar Irradiane at the Oean Surfae
Journal of Geophysial Researh, Vol.94, No.C7, 1989, 9731{9742
[7℄ W.B.Rossow, R.A.Shier Advanes in Understanding Clouds from ISCCP
Bulletin of the Amerian Meterologial Soiety, Vol.80, No.11, 1999, 2261{2287
[8℄ A.Hammer, D.Heinemann, A.Westerhellweg et al. Daylight and Solar Irradiane
Data Derived from Satellite Observations - the Satellight Projet
Dept. of Energy and Semiondutor Researh, Faulty of Physis, University of
Oldenburg, D-26111 Oldenburg, Germany
[9℄ J.Page Algorithms for the Satellight programme
Tehnial Report, 1996
[10℄ A.Skartveit, J.A.Olseth, M.E.Tuft An Hourly Diuse Fration Model with Corre-
tion for Variability and Surfae Albedo
Solar Energy 63, 173{183
[11℄ M.Fontoynont et al. Satellight: A WWW Server whih provides high quality day-
light and solar radiation data for Western and Central Europe
Pro. 9th Conferene on Satellite Meteorology and Oeanography, Paris, 25{29
May 1998, 747{750
[12℄ H.Shiller Feedforward-Bakpropagation Neural Net Program ffbp1.0
GKSS 2000/37 ISSN 0344-9629
33