Fracture mode analysis and related surface deformation during dyke
advertisement

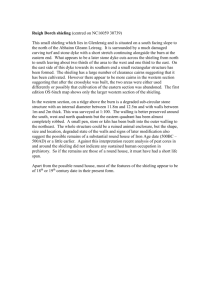
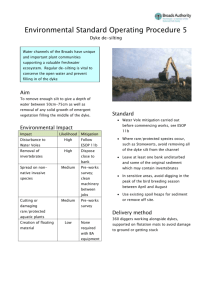
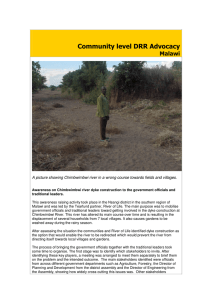
Earth and Planetary Science Letters 359–360 (2012) 93–105 Contents lists available at SciVerse ScienceDirect Earth and Planetary Science Letters journal homepage: www.elsevier.com/locate/epsl Fracture mode analysis and related surface deformation during dyke intrusion: Results from 2D experimental modelling M.M. Abdelmalak a,n, R. Mourgues a, O. Galland b, D. Bureau a a b LUNAM Université, Université du Maine, CNRS UMR 6112, LPGN, Avenue Olivier Messiaen, 72085 LE MANS CEDEX 9, France Physics of Geological Processes (PGP), University of Oslo, Norway a r t i c l e i n f o abstract Article history: Received 17 May 2012 Received in revised form 24 September 2012 Accepted 6 October 2012 Editor: Y. Ricard Available online 8 November 2012 Surface deformation analysis in volcanic edifices in response to shallow magma intrusion is crucial for assessing volcanic hazards. In this paper, we discuss the effect of dyke propagation mode on surface deformation through 2D laboratory models. Our experimental setup consists of a Hele-Shaw cell, in which a model magma is injected into a cohesive model crust. Using an optical image correlation technique (Particle Imaging Velocimetry), we measured the surface deformation, the displacements and the strain field induced by magma emplacement within the country rock. We identify two types of intrusion morphologies (Types A and B), which exhibit two evolutional stages. During the first stage, both types resulted in a vertical dyke at depth; its propagation was controlled by both shear deformation and tensile opening. The model surface lifted up to form a smooth symmetrical dome, resulting in tensile cracks. During the second stage, Types A and B experiments differ when the dyke reaches a critical depth. In Type A, the intrusion gradually rotates, forming an inclined sheet dipping between 451 and 651. This rotation results in asymmetrical surface uplift and shear failure upon the tip of the dyke. In Type B, the dyke tip interacts with tensile cracks formed during the first stage. This fracture controls the subsequent propagation of the dyke toward the surface. In both types of experiments, intrusions result in surface uplift, which can be accommodated by reverse faults. Our study suggests that dykes propagate as viscous indenters, rather than linear elastic fracturing. & 2012 Elsevier B.V. All rights reserved. Keywords: dyke experimental models surface deformation strain analysis viscous indenter Linear Elastic Fracture Mechanics 1. Introduction Surface deformation due to magma intrusions in volcanic systems can be detected by geodetic survey (Cayol and Cornet, 1998; Froger et al., 2001, 2007; Pedersen and Sigmundsson, 2006; Masterlark, 2007). Surface movements reflect the dynamics of volcanic plumbing systems, such as the shape of magma intrusions, the magma pressure, and the emplacement mechanisms. Recent experimental models even show that the time evolution of surface deformation can be used to predict the location of a preparing volcanic eruption (Galland, 2012). A proper understanding of the processes that govern surface deformation is therefore crucial for unravelling magma transport dynamics at depth. A classical approach for analyzing surface deformation is through forward or inverse modelling of surface deformation, using either analytical or numerical models. Analytical models consider simple shapes, such as an opening tensile crack (Bonafede and Danesi, n Corresponding author. Present address: Department of Geology, University of Oslo, P.O Box 1047 Blindern, N-0316 Oslo, Norway. E-mail address: abdelmalak_mansour@yahoo.fr (M.M. Abdelmalak). 0012-821X/$ - see front matter & 2012 Elsevier B.V. All rights reserved. http://dx.doi.org/10.1016/j.epsl.2012.10.008 1997) or a pressurized cavity (Mogi, 1958; Pollard and Holzhausen, 1979; Fialko et al., 2001; Gudmundsson, 2006) in elastic half-space. Numerical models can take into consideration more complex shapes. The models predict the shape and the opening of the intrusion, as well as the pressure of the magma. Nevertheless, such approach considers static systems only, where the mechanism of propagation and emplacement of the intrusions are not considered. Former studies, however, show that surface deformation strongly depends on intrusion propagation and emplacement mechanism. There are two competing models of emplacement, which provide contrasting surface expressions. A first model for dyke emplacement is Linear Elastic Fracture Mechanics (LEFM). This approach considers that dykes are open fractures, the country rock being elastic everywhere but in a small ‘‘process zone’’ at the tip of the fracture. In this model, the magma overpressure pushes on the dyke walls, leading to large tensile stresses at the dyke tip. The surface expression associated with this model is (1) no uplift above the dyke tip, and (2) two uplift zones on each side of the dyke tip. It has also been suggested that the emplacement of dykes result in subsidence of the Earth surface, triggering the formation of grabens and normal faults (Pollard et al., 1983; Mastin and Pollard, 1988; Rubin and Pollard, 1988). Such surface deformation patterns have been monitored in 94 M.M. Abdelmalak et al. / Earth and Planetary Science Letters 359–360 (2012) 93–105 viscosity of 16.6 Pa s and a density of 1400 kg m 3. The silica powder is sufficiently fine grained (15 mm) to prevent the percolation of the Golden syrup. After manual compaction, the density of the powder ranges between 1500 and 1700 kg m 3. The powder fails according to a Coulomb criterion with cohesion around 350 Pa and an angle of internal friction reaching 451 (Galland et al., 2006, 2009). Measurements were done in a Hubbert-type shear box (Krantz, 1991; Schellart, 2000; Mourgues and Cobbold, 2003). Due to its non-negligible cohesion, the silica powder fails both in tension (open cracks) and shear (faults). volcanic rift zones; however, it is difficult to decipher whether subsidence and normal faulting are triggered by the dyke or by the regional tectonic extension. Moreover, many feeder dykes and dykes arrested a few metres below the surface do not generate faults or grabens (Gudmundsson, 2003). In addition, on volcanoes with limited or no tectonic extension, dyke emplacement is usually associated with surface uplift (Fukushima et al., 2005). A second model considers that dykes propagate as viscous indenters (Donnadieu and Merle, 1998), producing shear failure at dyke tips. In such a model, the magma pushes the dyke tip ahead, indenting the country rock along small-scale shear zones. This model is in agreement with structural observations (Duffield et al., 1986; Gudmundsson et al., 2008) and geophysical measurements (Roman et al., 2004). The occurrence of shear failure at dyke tips has been observed in 2D laboratory experiments (Kervyn et al., 2009), and may explain the splitting of dykes into cone sheets close to the surface (Mathieu et al., 2008). The surface deformation associated with this model, however, has not been addressed. In order to study the effect of dyke propagation mechanism on surface deformation, we designed new 2-dimensional quantitative experiments of dyke emplacement. Our setup allows the monitoring of both (1) the displacements and strain field in the host rock at the vicinity of the dyke, and (2) the associated surface deformation. 2.2. Scaling The scaling procedure associated with magma intrusion in the brittle crust is challenging because (1) the experiments aim to simulate the coupling between fluid and solid mechanics, and (2) the ranges of geological settings and viscosities of magma are very broad. The principle is to define selected dimensionless numbers, which characterize the geometry, the kinematics and the dynamics of the simulated processes. The experiments are representative of their natural prototypes if the values of these dimensionless numbers in the experiments and in nature are equal. The following scaling procedure is based on the standard similarity conditions, as developed by Hubbert (1937) and Ramberg (1981). This procedure was detailed and applied to magmatic processes by Merle and Borgia (1996), Galland et al. (2009, 2006), Mathieu et al. (2008) and Gressier et al. (2010). The principal geometric input variable is the thickness of the overburden (L), which is the same as the final intrusion length. The output geometrical parameter is the intrusion thickness (e). Material properties are the densities of the magma (rm) and the country rock (rr), the angle of internal friction (F) and the cohesion (C) of the country rock, and the viscosity of the magma (Z). The experiments were performed in the natural field of gravity (g). The moving piston imposed the injection flow rate (Q). The magma flow velocity can be calculated from the thickness of the intrusion, which is a result and not a parameter known a priori. However, this parameter needs to be taken into account for the dimensional analysis in order to consider the viscous stresses inside the intrusions. Nine variables characterize the physical system, three of them having independent dimensions. According to the Buckingham-P theorem (e.g., Middleton and Wilcock, 1994; Barenblatt, 2003) and following Galland et al. (2009), we defined six dimensionless numbers listed in Table 1. We chose the scale ratio between our experiments and nature to be between 10 4 and 10 3, so that 1 cm in the experiments represents 10–100 m. The first dimensionless parameter defines the geometric ratio of the dyke. In nature, two aspects ratios are required to describe entirely the 3-dimensional geometry of a dyke. In our 2D 2. Experimental setup and scaling 2.1. Model materials Among the various methods used to study dyke propagation, analogue modelling based on fluid injection into gelatin has been used for many years (Hubbert and Willis, 1957; Pollard, 1973; Rubin and Pollard, 1988; Takada, 1994; Kavanagh et al., 2006; Menand, 2008). This material has the advantage to be transparent, it fails in tension, and its elastic properties are becoming better known (Di Giuseppe et al., 2009). Nevertheless, it is too cohesive to represent weak brittle rocks, and it is not scaled to simulate plastic shear deformation. To overcome this difficulty, Galland et al. (2006, 2009) and Mathieu et al. (2008) used cohesive granular materials (silica powder, ignimbrite, and diatomite powder). These materials fail both in tension and in shear at low differential stresses, so their behaviour is closer to that of natural rocks. Among the analogue materials described in the literature, such as silica powder (Galland et al., 2003, 2006, 2009), diatomite powder (Gressier et al., 2010), flour (Mastin and Pollard, 1988), vegetable oil (Galland et al., 2006; 2009), and Golden syrup (Mathieu et al., 2008), we chose to use Golden syrup as a magma analogue and a fine-grained silica powder as a brittle crust analogue. At room temperature (22 1C), Golden syrup has a Table 1 Symbols, units, and values of the mechanical variables in nature and experiments. L C f rm rr Z s g e U Definition of parameters Field Experiment Dimension Thickness (length scale) Cohesion of brittle material Angle of internal friction Density of magma Density of country rock Viscosity of magma Gravitational stress Acceleration due to gravity Intrusion thickness Velocity of intrusion propagation 200–2000 105–107 30–40 2500–2700 2500–2900 104–106 4.9 106–107 9.81 1–10 1 0.2 350 40 1400 1500–1700 16,6 at 22 1C 3.1 103 9.81 2–5 10–3 0.5 10 3 m Pa Dimensionless kg m 3 kg m 3 Pa s Pa m s2 m m s1 M.M. Abdelmalak et al. / Earth and Planetary Science Letters 359–360 (2012) 93–105 experiments, where propagation was restricted in the third dimension, only one aspect ratio has a physical significance: P1 ¼ e=L: ð1Þ 4 In nature, typical range for P1 for dykes is between 10 and 10 2 (Rubin, 1995; Geshi et al., 2010; Kavanagh and Sparks, 2011; Daniels et al., 2012). In the experiments, the length of the dykes being 20 cm, and their thickness ranging from 1 to 5 mm, P1 ranges from 5 10 3 to 2.5 10 2. These values overlap with values of P1 in nature, though they correspond to the lower bound. For the brittle behaviour of the country rock, we use two numbers: P2 ¼ rr gL=C, ð2Þ P3 ¼ F: ð3Þ The angle of internal friction of the silica flour was measured at 391 (Galland et al., 2006, 2009). It is thus in the range for natural rocks (between 251 and 451; Schellart, 2000). The value of P2 in our experiments is 9 (Table 2). The cohesions of natural rocks span from 105 to 108 Pa (Schultz, 1995, 1996; Schellart, 2000; Voight, 2000; Thomas et al., 2004; Schiffman et al., 2006). If we consider a scale ratio of 10 4, P2 in nature ranges between 5 10 1 and 5 102. The value of P2 in our experiments thus falls right in the middle of this range, so that the silica flour is a good representative of natural rocks in general. If we consider a scale ratio of 10 3, P2 in nature becomes between 5 10 2 and 50; P2 in the experiments is thus close to the upper bound, and in this case, the silica flour is representative of strong rocks, such as unfractured basalts. In order to scale the fluid properties and its injection rate, two numbers need to be defined: P4 ¼ ZLU=e2 C, ð4Þ P5 ¼ rm eU=Z: ð5Þ P4 is the ratio of viscous pressure drop along the intrusion to the cohesion of the country rock. P5 is the Reynolds number, which is the ratio between inertial and viscous forces. In nature, according to field observations and theoretical studies, dyke propagation velocities range from 10 2 m s 1 for viscous rhyolitic or granitic magmas (Clements and Mawer, 1992; Petford et al., 1993), to about 0.1–1 m s 1 for less viscous basaltic magma (Spence and Turcotte, 1990; Roman et al., 2004; White et al., 2011). Magma viscosity depends on chemical composition, water content, temperature, and volume fraction of crystals. It can therefore vary widely from 10 Pa s for basaltic melts to 1018 Pa s for partially crystallized granitic magma (Spera, 1980; Petford et al., 1993; Merle and Vendeville, 1995). In this study, we will consider the viscosity of common magmas, such as dry basalt, andesite, and trachyte, which viscosity range is between 1000 Pa s and 106 Pa s. Dyke thickness typically range from 1 to 10 m. Thus, considering a scale ratio of 10 4, P4 ranges between 2 10 5 and 2 104. Considering a scale ratio of 10 3, P4 spans between 2 10 6 and 2 103. In our models, Golden syrup 95 (viscosity¼16.6 Pa s) is injected at a velocity of 0.5 mm s 1 in 2 mm–5 mm wide dykes. Thus, P4 in our experiments range between 0.2 and 1.2, which falls close to the middle of the range of P4 for natural systems. For both nature and experiments, the Reynolds number (P5) is much lower than the critical value of 2000. This implies that magma flows in both cases are laminar. The last number is the ratio of hydrostatic forces to lithostatic forces: P6 ¼ 1rm =rr ð6Þ In our experiments, P6 ranges between 0.06 and 0.17, meaning that the Golden syrup is slightly positively buoyant. In nature, the magma is neutrally, positively or negatively buoyant with P6 ranging between 0.06 and 0.13. Thus, our experiments are only representative of buoyant magmas within dykes. To summarize, there is a good match between the P numbers calculated for natural systems and for our experiments. All the dimensionless numbers can be satisfied by taking different length scales, viscosity and timescales. Our experiments are physically equivalent to shallow geological systems (o2 km). For example, assuming a length scale ratio between 10 2 and 10 3, we modelled intrusions with thicknesses ranging between 2 and 20 m, brittle rocks with cohesion between 0.5 MPa and 5 MPa and magma viscosities between 104 and 106 Pa s. The results of the experiments could also be upscaled to deeper systems involving thicker intrusions of more viscous magmas, in a stronger brittle crust. 2.3. Experimental setup We conducted experiments in two dimensions in order to observe deformation during the dyke growth. Our apparatus consisted of a Hele-Shaw cell, 50 cm long and 35 cm high and 2.5 cm thick. To reduce the silo effect (Mourgues and Cobbold, 2003), which may perturb the vertical stress, the walls were made of glass with low friction and we limited the height of the models to 20 cm (Fig. 1). The silica powder was poured manually in the box. We were careful to keep a homogeneous distribution of the powder. The powder was manually compacted in order to control its density at 1500–1700 kg m 3. The Golden syrup was then injected at the base of the powder with a moving piston through the injector (Fig. 1). We calibrated the piston motion to keep a constant injection velocity. The injection of the Golden syrup resulted in the intrusion of a thin dyke perpendicular to the wall of the cell. The propagating dyke and the deformation of the host were observable through the transparent glass wall, and photographed. We used a Particle Imaging Velocimetry (PIV) technique to calculate displacement and deformation fields in the host by optical images correlations (White et al., 2003; Adam et al., 2005). This method operates on the image texture and it is possible only if the material is not homogeneous in colour. To avoid this, we added black powder of silicon carbide in the silica powder, providing a grained texture. Table 2 Average dimensionless ratios P for nature and experiments. P1 P2 P3 P4 P5 P6 Dimensionless ratios Mathematical expression Field Experiment Field ratios for suitable values Thickness/length Gravitational stress/cohesion Angle of internal friction Viscous stress/cohesion Re ¼ Inertial/viscous forces Magma/country rock densities e/L rrgL/C 5 10 3–10 2 5 10 2–50 30–40 2 10–6–103 2.6 10 4–26 0.06–0.13 10 2 9 40 0.19–1.2 10 4 0.125 10 2 9 40 0.13 0.33–0.033 0.12 f ZLU/e2C rmeU/Z 1 rm/rr 96 M.M. Abdelmalak et al. / Earth and Planetary Science Letters 359–360 (2012) 93–105 2.5 Glass cm 50 cm Uplift and surface fracturation Glass Silica powder ~20 cm 35 cm 5 cm Intrusion Recording of velocity 15 cm Injector Injection tube Piston Came ra Golden syrup reservoir Fig. 1. Drawing of the experimental setup, consisting of Hele-Shaw cell (50 cm long and 35 cm high and 2.5 cm thick). The Golden syrup was injected at the base of the model through a linear injector. To reduce the silo effect, walls were made of glass with low friction and the model height was limited to 20 cm. The propagating dyke and the deformation of the host were observed and recorded through the transparent glass wall. The amount of black powder being very small compared to that of the silica powder, we assume that such addition does not modify the mechanical properties of the silica powder. The displacement field around the intrusion was computed by cross-correlation from the translation and distortion of the particle pattern in successive images with a given time interval of Dt ¼3 s. We used five pixel wide correlation windows. As demonstrated by White et al. (2001), PIV cross-correlation allows the calculation of displacements with sub-pixel accuracy ( o0.1–0.2 pixel). In our case, the side of each pixel is 140 mm, so that displacements down to 30 mm can be monitored. 3. Results 3.1. Intrusion morphologies We performed more than 20 experiments at room temperature (22 1C, constant fluid viscosity: 16.6 Pa s) with various powder densities (ranging between 1500 and 1700 kg m 3) and injection rates (0.5 10 3 and 1 10 3 m s 1). We did not observe any significant influence of these parameters in the tested ranges but we systematically obtained two kinds of morphologies independent of the input parameters. We choose to repeat several times the same experiment (six identical experiments are shown in Fig. 2; height of powder: 20 cm, injection velocity: 0.5 10 3 m s 1) and we analyzed them by PIV. We present only this series of experiments to discuss the formation of two distinct intrusion morphologies (type A and type B, Fig. 2). Considering all our intrusions, morphologies A and B appeared with the same frequency. In all experiments, we distinguish two stages for the emplacement of the intrusions. 3.2. Type A experiments Stage 1 initiated with a vertical dyke, which grew from the injector to a depth ranging between 7 and 9 cm below the surface (Fig. 2a1–a3). During this stage, symmetrical gentle surface uplift occurred over a large area directly above the apex of the dyke (Fig. 3a). As a result, small open cracks formed at the model surface; as the dyke propagated upward, the open cracks propagated downward (Figs. 2a and 4a–c). Generally, two cracks formed symmetrically on each side of the vertical projection of the dyke apex onto the model surface. Stage 2 started when the dyke reached a depth of 7–9 cm below the surface. It deviated gradually from vertical and became inclined, with a dip ranging between 451 and 651 (Fig. 4c and d). The surface uplift gradually localized over a small area directly above the apex of the dyke, and the uplift accelerated significantly (Fig. 3). Surface uplift remained broadly symmetrical. Closer to the surface (stage 2b), the dyke flattened out even more, reaching 301 dip (Fig. 4e). Surface uplift kept accelerating, and became strongly asymmetrical, the maximum uplift being directly above the apex of the inclined sheet (Fig. 3). This last uplift generated several open cracks upon the inclined dyke. 3.3. Type B experiments Stage 1 of Type B experiments was very similar to that of Type A experiments, with the propagation of a vertical dyke (Fig. 5a and b), gentle surface uplift spread over a large area (Fig. 3b), and open cracks affecting the surface. Stage 2 in these experiments, in contrast, shows striking differences with that of the Type A experiments. When the initial vertical dyke reached 5–6 cm below the surface (Fig. 2b), it sharply bent to horizontal, and subsequently bent to subvertical by following the traces of open cracks formed during stage 1. When this sharp transition occurred, the surface uplift accelerated, even more than in Type A experiments (Fig. 3). The uplift became suddenly restricted to a very narrow area, bounded by sub-vertical walls. Photographs of Fig. 5 show that this uplift is associated with the upward movement of the block of flour delimited by the two main open cracks formed during stage 1, i.e. a popup structure. M.M. Abdelmalak et al. / Earth and Planetary Science Letters 359–360 (2012) 93–105 5 cm Surface fracturation and uplift Dyke segmentation 5 cm Dyke segmentation Percolation Surface fracturation and uplift 5 cm Percolation sheet intrusion Injector Injector Surface fracturation and uplift 5 cm Surface fracturation and uplift Injector Injector Surface fracturation and uplift 97 Surface fracturation and uplift 5 cm 5 cm Percolation sheet intrusion Injector Injector Fig. 2. Photographs of typical results of the two type intrusions: (A (a1, a2, a3)) and (B (b1, b2, b3)). In this whole series of experiments, the parameters were constant: density ( 1500–1700 kg m 3) of silica powder; density (1400 kg m 3) and viscosity (16.6 Pa s) of Golden syrup; velocity of model magma (0.5 10 3 m s 1); overburden thickness ( 20 cm) above the top of injector. In a number of experiments, we observed the formation of several small sheet intrusions radiating from the injector (Fig. 2). Some of them grew a few centimetres vertically before stopping, while others went down and stopped very quickly. The formation of these small intrusions propagating in various directions is certainly due to stress perturbations in the vicinity of the injector. In some experiments, the intrusions did not appear continuous (Fig. 2a1 and b2). This phenomenon is probably due to segmentation of the dykes across the thickness of the cell. Locally, we also observed parasitic flow of Golden syrup between the powder and the glass wall (Fig. 2). This boundary effect mostly occurred in the vicinity of the injector, i.e. far from the dyke tip at the transition from stage 1 to stage 2. Therefore, we infer that it does not influence the propagation of the dyke during the transition between the two stages of emplacement. 3.4. Strain analysis In order to quantify the strain field in the host material of the intrusions, we applied PIV on two selected experiments, in which the intrusions were continuous and where no percolation occurred along the walls. Figs. 4 and 5 represent maps of the incremental (Dt ¼3 s) horizontal and vertical displacements, and shear strain in the entire models. Fig. 6 shows the detailed strains calculated in the vicinity of the tip of the dyke. 3.5. Type A experiments During Stage 1, the propagation of the vertical dyke produced horizontal displacements on each side of the dyke, indicating opening and enlargement of the intrusion (Fig. 4a1–c1). These displacements were more prominent near the tip of the dyke, and disappeared at its base (Fig. 4c1). Small amplitude upward movements affected a broad symmetrical conical area, with diffuse boundaries, of the overburden of the dyke (Fig. 4a2). This cone became narrower, and the amplitude of the displacements became larger, as the dyke propagated upward (Fig. 4b2 and c2). The image analysis displayed very limited shear strain in the model, except local V-shaped deformation pattern in the vicinity of the dyke tip (Fig. 6a2). Strain analysis showed that these small-scale deformation bands accommodate both dilation and reverse shear. This local deformation pattern, however, was not systematically recorded through time (Fig. 6b2 and b3). At the beginning of stage 2, the bending of the dyke produced asymmetric horizontal displacement pattern (Fig. 4d1). The conical area affected by upward displacements kept narrowing and became also asymmetrical: its right boundary where the dyke propagated was diffuse, whereas its left boundary exhibited an important displacement gradient (Fig. 4d2), which corresponded to localized shear strain (Fig. 4d3). At the last stage of the experiments, the right boundary of the uplifted conical area became diffuse, whereas the right boundary became sharp, with 98 M.M. Abdelmalak et al. / Earth and Planetary Science Letters 359–360 (2012) 93–105 Surface uplift record Surface uplift record 2 2 Strage 1 related uplift 1 Strage 1 related uplift Surface topography Strage 2a related uplift Strage 2 related uplift Strage 2b related uplift 1 cm 1 cm 1 0 0 Surface uplift Surface uplift 5 cm Surface fracturation Stage 2b 5 cm Surface fracturation Stage 2a Stage 1 Stage 1 Level of dyke apex Type A intrusion Stage 2 Type B intrusion Level of dyke apex Maximum surface uplift (cm) 1.2 Stage 1 1.0 Stage 2 Type A intrusion 0.8 Type B intrusion 0.6 0.4 0.2 0.0 0.0 2.0 4.0 6.0 8.0 10.0 12.0 Level of dyke apex (cm) 14.0 16.0 18.0 20.0 Fig. 3. Topographic data plotted during the propagation of the dyke. (a) Data for Type A intrusion. Upper graph shows temporal topographic profiles drawn from photographs. During the first stage of the dyke growth, the uplifted zone is symmetrical and smooth. In a second stage, the symmetry is slightly distorted and the uplift moves to the right due to the dyke rotation near the surface. (b) Data for type B intrusion. The uplift remains symmetrical during the first and the second stages. The uplift rate increases and is strongly influenced by two cracks, which accommodate significant reverse slip and generate a pop-up structure. (c) Plot representing the maximum surface uplift with respect to the depth of the dyke apex. In the first stage the uplift rate is low and equal for both type of intrusions. The transition to the second stage is characterized by an uplift acceleration. This acceleration is more important for Type B experiment than for Type A. shear strain localization (Fig. 4e2 and e3). The final dyke trajectory followed this zone of strain localization. 3.6. Type B experiments Stage 1 in Type B experiments was very similar to that of Type A experiments. An initial vertical dyke produced horizontal displacements on each side of the dyke, indicating opening and enlargement of the intrusion (Fig. 5a1 and b1). During upward propagation of the dyke, horizontal displacements mostly occurred close to the upper tip of the dyke and became negligible at its base (Fig. 5b1 and c1). Small amplitude upward movements affected a broad symmetrical conical area of the overburden of the dyke, with diffuse boundaries (Fig. 5a2 and b2). This uplifted area became narrower as the dyke propagated upward. In this initial stage, similarly to Type A experiments, shear strain in the model is limited, except for a local V-shaped deformation pattern in the vicinity of the dyke tip (Fig. 6a2 and a3). When the dyke reached 7 cm below the surface, important shear deformation occurred between the tip of the dyke and the model surface, while the dyke remained vertical (Fig. 5c3). This is evidenced by the sharp boundaries in the vertical displacement field (Fig. 5c2) indicating that the upward displacement of the overburden was accommodated by two conjugate reverse shear zones. These shear bands are the downward continuation of the open fractures that affected the model surface. M.M. Abdelmalak et al. / Earth and Planetary Science Letters 359–360 (2012) 93–105 Fig. 4. Different stages of vertical dyke propagation for a type A intrusion (a–e). Pictures are analyzed by P.I.V. technique. Horizontal displacements (a1–e1), vertical displacements (a2–e2) and shear deformations (a3–e3) are calculated between two successive pictures. The correlation window is five pixels wide. 99 100 Stage 1 Horizontal displacement Vertical displacement Shear strain x 10 m x 10 m x 10 m x 10 m x 10 m x 10 m x 10 m x 10 m x 10 m x 10 m Fig. 5. Different stages of vertical dyke propagation for a type B intrusion (a–e). Pictures are analyzed by P.I.V. technique. Horizontal displacements (a1–e1), vertical displacements (a2–e2) and shear deformations (a3–e3) are calculated between two successive pictures. The correlation window is five pixels wide. M.M. Abdelmalak et al. / Earth and Planetary Science Letters 359–360 (2012) 93–105 Stage 2 Type B intrusion M.M. Abdelmalak et al. / Earth and Planetary Science Letters 359–360 (2012) 93–105 101 Fig. 6. Different modes of vertical propagation of the dyke at the beginning of experiments. Left: original photographs. Centre: maps of horizontal strain. Right: maps of shear strain. In (a1–a3) we can observe two small zones of dilation and reverse shearing, exhibiting a V–shape at the tip of the dyke. In (b1–b3) no deformation was recorded at the top of the dyke. Horizontal displacement Shear strain x 10 m 5 cm Surface uplift 5 cm crack opening a3 Dyke Dyke x 10 m 5 cm 3 cm Surface uplift 5 cm Dyke Shear band formation b3 Dyke 3 cm Fig. 7. Dyke propagation near the surface for the type A intrusion. (a) Beginning of stage 2. (b) End of stage 2. Left: maps of horizontal displacements. Centre: maps of shear strain. Right: schematic diagram. The (a1–a3) pictures indicate rotation of stresses, which modifies the direction of propagation following a mode 1 (pure tension) opening. The (b1–b3) pictures show the formation of a shear band that was infiltrated by the Golden syrup in the final stage. Stage 2 started when the dyke tip intersected one of the shear zones formed at the end of stage 1 (compare Fig. 5d with c3). The upward movements of the overburden became strictly restricted to a small domain bounded by the two reverse shear zones formed at the end of stage 1, isolating a ‘‘popup’’ structure (Fig. 5d2 and d3). The size of this popup structure remained constant during stage 2. After a sharp bending, the dyke tip followed the trajectory of one of the reverse shear bands. In the shallowest centimetre of the model, additional reverse faults, dipping at 301, formed on each side of the popup (Fig. 5e2 and e3). 4. Discussion 4.1. Validity of experimental procedure By confining the models between two glass plates, the processes simulated in the experiments are considered to be 2D, in plane strain configuration, such as most mathematical and numerical models of dyke emplacement (Pollard, 1973; Pollard and Holzhausen, 1979; Bonafede and Danesi, 1997; Gudmundsson and Loetveit, 2005). In such configuration, the dykes are expected to be continuous and perpendicular to the walls of the cell. Nevertheless, although the dykes were roughly perpendicular to the walls in our experiments, we observed that they were not always continuous (Fig. 2). We infer that some dyke segmentation occurred locally in the third dimension. This 3-dimensional effect can produce local additional strain patterns, such as strain localization between two dyke segments (Fig. 7b2). Our results are very comparable to those obtained in 3D experiments. Notably, the transition from a vertical dyke to an inclined sheet has also been simulated in the 3D experiments of Mathieu et al. (2008), Galland et al. (2009) and Galland (2012). In addition, the depths of the dyke-to-inclined sheet transition in our experiments (between 5 and 9 cm below the surface) were similar to those obtained in these previously published 102 M.M. Abdelmalak et al. / Earth and Planetary Science Letters 359–360 (2012) 93–105 experiments (between 2 and 7 cm). This similarity suggests that the boundary effects in our experiments played a minor role on the studied processes, but we cannot totally exclude them. In some experiments, we also observed parasitic flow of Golden syrup between the powder and the glass wall, forming large grey patches in the photographs (Fig. 2). The grey patches can substantially perturb the image analysis to quantify the strain field. Such boundary effect mostly occurred away from the dyke tip. We thus infer that (1) it does not influence the propagation of the dykes and (2) it does not change our strain analysis in the vicinity and above the dyke tip. 4.2. Strain analysis and dyke propagation mode The strain analysis is fundamental to constrain the deformation mechanisms at the dyke tips, and therefore to understand their mode of propagation. The detailed strain analyses during some time steps highlight the formation of V-shaped reverse shear bands rooted at the dyke tips (Fig. 6a3). These shear bands accommodate both dilation and uplift of the overriding material. The dilation is compatible with the opening of the dyke, and the uplift is compatible with the observed surface uplift. Our results, however, do not show any evidence of normal faulting or subsidence of the model surface. This result is compatible with the model of viscous indenter proposed by Donnadieu and Merle (1998) and Mathieu et al. (2008), but less with the classical theory of LEFM, which predicts a more complex uplift pattern (Pollard et al., 1983; Mastin and Pollard, 1988; Rubin and Pollard, 1988). Our experiments show that tensile fractures form at the model surface during the upward propagation of the dykes (Figs. 2, 4 and 5), as observed on many active volcanoes. The experiments also show that the model surface was uplifting at the same time, bending the model surface like a smooth antiform (Fig. 3). Such surface bending generates tensile stresses at the top of the antiform (Price and Cosgrove, 1990). We thus infer that these tensile fractures formed due to outer-arc stretching at the top of the antiform, but not as a result of surface subsidence and normal faulting. We noticed that the dykes in our experiments did not propagate straight and that the dyke tips were irregular (Figs. 2, 4 and 5). Such complex shapes have been recognized in the field (Pollard and Johnson, 1973; Francis, 1982; Delcamp et al., 2008) as well as in experimental models (Mathieu et al., 2008; Kervyn et al., 2009). Mathieu et al. (2008) suggest that this morphology is also compatible with the viscous indenter theory: the small shear zones produced by the propagation of the magma in its host rock control the oblique propagation of the dyke tip. These V-shaped shear bands, however, were not systematically observed. Fig. 6b1–b3 shows an example where no stretching or shear deformation is measured at the dyke tip. One can notice that the morphology of this dyke is straighter than that of the dyke of Fig. 6a. In this case, the dyke may grow by hydrofracturing the country rock without plastic shear deformation. Mathieu et al. (2008) also suggested that both hydraulic and shear-related intrusions propagation could operate in the same time. Nevertheless, it is possible that shear deformation occurred, but being so small that it cannot be detected by PIV analysis. 4.3. Shallow dyke propagation The transition between stage 1 (vertical growth) and stage 2 (inclined propagation) occurred 9–5 cm depth below the surface (Fig. 2). This two-stage evolution has been observed in the experiments of Mathieu et al. (2008), Galland et al. (2009) and Galland (2012). If stage 1 in both Type A and Type B experiments is identical, stage 2 for each experiments type substantially differ. The following paragraphs discuss these differences. Type A intrusion is characterized by the progressive rotation of the vertical dyke at a critical depth ranging between 7 and 9 cm (Figs. 2a1–a3, 4). In Figs. 4 and 7a1 and a2, the displacements indicate a zone of opening in front of the dyke tip and in the same direction as that of the dyke, the displacement vectors being perpendicular to the dykes (Fig. 7a3). Fig. 7a2 shows that no major shear zone formed at the vicinity of the dyke when the transition between stage 1 and stage 2 occurred. Therefore, the rotation of the dyke to inclined sheet was not controlled by structures like faults. Mathieu et al. (2008) proposed that the inclined sheets that form cup-shaped intrusions developed at a critical depth, above which shear failure at the tip of the dyke becomes reverse. Nevertheless, Fig. 6 shows that local V-shaped reverse shear deformation was recorded well before the formation of an inclined sheet, and thus cannot explain the rotation of the dyke tip. We propose instead that the formation of the inclined sheet resulted from stress rotation. Stress rotation occurring around shallow magma intrusions is a well-known phenomenon, which is involved in the formation of, e.g. cone-sheets around punctual, spherical (Anderson, 1936; Mogi, 1958; Gudmundsson, 2006) and elongated overpressured magma reservoirs (Koide and Bhattacharji, 1975), and cracks (Pollard, 1973; Bonafede and Danesi, 1997; Gudmundsson and Loetveit, 2005). Such stress rotation due to the near free surface also explains the formation of (1) en-échelon dykes segments (Pollard et al., 1982) and (2) saucer-shaped sills (Malthe-Sørenssen et al., 2004; Goulty and Schofield, 2008; Polteau et al., 2008; Galland et al., 2009; Galerne et al., 2011). Stress rotation occurs at shallow levels, as it becomes easier for the dyke to lift up its overburden rather than pushing its host laterally. Once the inclined sheet initiated, we observed that the mechanical system gradually developed significant asymmetry. The surface uplift moved towards the direction of the inclined sheet (Fig. 3a). Surface uplift subsequently became asymmetrical, with the steepest slope being on the external edge of the uplifted area, upon the tip of the propagating inclined sheet. During the final stage of type A experiments, the differential uplift associated with the steepest slope of the uplifted area was such that it triggered the formation of a reverse shear band, which was subsequently infiltrated by the Golden syrup (Fig. 7b1–b3). At this stage, the mode of propagation is not hydraulic fracturing any more, but shearing and then infiltration. The sheets appear more regular and we noticed an acceleration of the magma ascent. The development of such asymmetry during type A experiments is compatible with the growth of a mechanical instability. This hypothesis is in good agreement with the stability analysis developed by Bunger (2005), which explained the asymmetrical development of near-surface fractures. In our experiments, stress rotation may be favoured by the boundary conditions. Indeed, our models are subjected to gravity but not to tectonic stresses, such that the initial stress field is close to isotropic. The only additional loading is the fluid pressure in the vertical dyke. It is equivalent to a ‘line load’ which commonly produces a radial stress distribution (Johnson, 1985). Deviation from the vertical may be probably triggered by small heterogeneities in the properties of the material. In nature, additional extensional tectonic stresses or stresses due to surrounding inflating magma chamber may provide stronger anisotropic stress field which may prevent stress rotation and favour the formation of purely vertical dykes (Geshi et al., 2010, 2012). Intrusions of type B experiments showed a drastically different evolution during stage 2 (Fig. 8). In contrast with Type A experiments, we observed that stage 2 in Type B experiments started when the dyke tip intersected with the trace of a shear zone (Fig. 8a2), which formed at the end of stage 1. Note that this M.M. Abdelmalak et al. / Earth and Planetary Science Letters 359–360 (2012) 93–105 103 Fig.8. Dyke propagation near the surface for the type B intrusion. (a) Beginning of stage 2. (b) End of stage 2. Left: maps of horizontal displacements. Centre: maps of shear strain. Right: schematic diagram. The (a1–a3) pictures indicate shear deformation appears between the tip of the dyke and vertical tension fractures, which propagate downward from the surface. The (b1–b3) pictures show one of these two cracks was intruded by the Golden syrup, which then reaches the surface. By propagating into the vertical crack, the magma generates horizontal stresses, which close the second crack. shear zone was the prolongation at depth of a surface open fracture, which propagated downward while the dyke was intruding (Fig. 8a3). Such downward open fracture opening is similar to that described by Tentler (2005) in the rift of Iceland. Subsequently, the dyke followed the trace of the shear zone, then the open crack, until eruption (Fig. 8b3). This result shows that plastic deformation, and especially faults, in the host rock can substantially control the propagation of dykes. This is in good agreement with the observations of Tentler (2005) and Valentine and Krogh (2006), which show that dykes can follow normal faults. Our results suggest that significant plastic deformation can be generated by the emplacement of sheet intrusions. This effect has usually not been taken into account in former numerical and analytical models of near-surface dyke intrusion, in which elasticity only is considered (Pollard and Johnson, 1973; Pollard and Holzhausen, 1979; Fialko, 2001; Fialko et al., 2001; Gudmundsson, 2002; Malthe-Sørenssen et al., 2004; Goulty and Schofield, 2008). Seismic data across sill complexes, however, show that the seismic reflectors upon the tips of the sills are offset, suggesting that plastic deformation plays a significant role in the vicinity of magma intrusions (Hansen and Cartwright, 2006; Kavanagh and Sparks, 2011). Plastic deformation was also invoked to explain the formation of cone-sheets (Phillips, 1974) and the initiation of cup-shaped structures at shallow depth in the experiments of Mathieu et al. (2008). Type B experiments show that the main shear zones that form as a result of the intrusion of a dyke accommodate reverse shear (Figs. 5 and 8). We also observed that as soon as the dyke tip intersected one of the shear zones, the uplift became restricted to the block separated by the two open fractures, and suddenly accelerated (Fig. 5). This confirms that the model magma pushed its overburden upward, and did not produce normal faults and subsidence. Subsequently, the model magma intruded along one side of the block, pushed it laterally and triggered the closing of the conjugate open crack on the opposite side of the block (Fig. 8b3). Our observations are in good agreement with the field data of Gudmundsson et al. (2008), who described large reverse slip on faults near vertical feeder dykes in rift-zone grabens. Numerical models predicted such slips and also the closure of crack and pre-existing faults (Gudmundsson and Loetveit, 2005). 4.4. Surface deformation Our 2D apparatus allowed us to compare the evolution of the model surface deformation and the associated intruding dyke (Fig. 3). In both Type A and Type B experiments, the two-stage evolution of the maximum uplift was perfectly correlated with the two-stage evolution of the underlying intrusions. In addition, the evolutions of the maximum uplift during stage 2 of Type A and Type B experiments were different. This difference reflected the distinct mechanisms of magma emplacement. This shows that the intrusion mechanism plays a major role on surface deformation. In volcanic systems, however, only the shape of the intrusions and the magma pressure are considered for inverting surface deformation data (Amelung et al., 2000; Fialko and Simons, 2001; Fukushima et al., 2005, 2010; Battaglia et al., 2006; Pedersen and Sigmundsson, 2006; Wright et al., 2006; Chang et al., 2007; Grandin et al., 2010a, 2010b; Woo and Kilburn, 2010). Therefore, considering the mechanics of magma intrusion is necessary to interpret surface deformation in active volcanoes. Our experiments also showed that the surface deformation in Type A experiments evolved from symmetrical to asymmetrical (Fig. 3a). This asymmetry directly reflected the asymmetrical development of the underlying intrusion. Notably, the steepest slope of the model surface is located right above the tip of the intrusion, i.e. the shallowest part. Analyzing the asymmetry of the surface deformation is thus crucial for detecting the shallow parts of the intrusions. Such an analysis can thus be used as a tool for predicting where the magma rises to the surface, and so where it is likely to erupt. Thus the result supports that of Galland (2012), which 3D models show that asymmetric development of the ground deformation pattern corresponded with the asymmetric geometry of the underlying intrusion. It could also be used to characterize better the surface deformations induced by a magma interacting with heterogeneities, mechanical discontinuities (faults) and mechanical layering. 5. Conclusions In this paper, we present results of laboratory experiments that simulate shallow dyke emplacement. The experimental setup allows us to monitor through time (1) the morphology of the 104 M.M. Abdelmalak et al. / Earth and Planetary Science Letters 359–360 (2012) 93–105 dyke, (2) the deformation field around the dyke, and (3) the surface deformation associated with the dyke. The main conclusions of our study are summarized by the following points: 1. Some surface deformation data are compatible with Linear Elastic Fracture Mechanics theory of dyke propagation (tensile fractures at the surface). But most of our strain results in the host rock suggest that dykes propagate as viscous indenters. If this is the case, plastic deformation at the vicinity of dyke tips plays a major role in dyke propagation. 2. Intruding dykes trigger surface uplift. The uplifted area narrows when the dyke propagates towards the surface. Consequently, open fractures dissect the model surface due to outerarc stretching. At depth, uplift is accommodated either by diffuse deformation or localized small amplitude reverse shear zones. 3. Dyke emplacement occurred in two stages: (1) at depth, dyke propagates upward vertically; and (2) from 9–5 cm depth below the surface, dyke is deflected from its vertical trajectory. 4. This second stage shows two different behaviours (Types A and B) of the dykes. Type A corresponds to gradual rotation of the dyke tip. Such rotation results from stress rotation due to the near-free surface and the absence of tectonic stress. Type B results from the interaction between the dyke tip and a reverse fault formed during Stage 1 of the experiment. Here, the dyke propagation is controlled by the fault trajectory. Note that both Types A and B occur in experiments with identical initial and boundary conditions. 5. The evolution of surface deformation is perfectly correlated with the dynamics of dyke intrusion at depth. The two stages of dyke propagation resulted in different uplift rates, and the distinct types of intrusions produced contrasting uplift patterns. This shows that the mechanism of dyke propagation plays a major role on surface deformation. Effects of mechanical layering on the path of hydrofractures and on surface deformation will be tested in future experiments. 6. Our results are very comparable to those obtained in 3D experiments. This similarity suggests that the sidewall effects in our experiments played a minor role on the studied processes. Nevertheless, future 2D and 3D experiments conducted strictly in the same conditions will be necessary to quantify precisely this effect. Acknowledgements We thank Julien Collet and Geoffrey Lacour for their help in the experimental modelling. The experiments were done in the laboratory of Le Mans (University of Maine, France). We also wish to thank Janine Kavanagh and Agust Gudmundsson for their useful comments and constructive criticism that improved the paper. References Adam, J., Urai, J.L., Wieneke, B., Oncken, O., Pfeiffer, K., Kukowski, N., Lohrmann, J., Hoth, S., van der Zee, W., Schmatz, J., 2005. Shear localisation and strain distribution during tectonic faulting—new insights from granular-flow experiments and high-resolution optical image correlation techniques. J. Struct. Geol. 27, 283–301. Amelung, F., Jonsson, S., Zebker, H., Segall, P., 2000. Widespread uplift and ‘‘trapdoor’’ faulting on Galapagos volcanoes observed with radar interferometry. Nature 407, 993–996. Anderson, E.M., 1936. The dynamics of formation of cone sheets, ring dykes and cauldron subsidences. Proc. R. Soc. Edinburgh 56, 128–157. Barenblatt, G.I., 2003. Scaling. Cambridge University Press, Cambridge. Battaglia, M., Troise, C., Obrizzo, F., Pingue, F., De Natale, G., 2006. Evidence for fluid migration as the source of deformation at Campi Flegrei caldera (Italy). Geophys. Res. Lett. 33, L01307. Bonafede, M., Danesi, S., 1997. Near-field modifications of stress induced by dyke injection at shallow depth. Geophys. J. Int. 130, 435–448. Bunger, A., 2005. Near-Surface Hydraulic Fracture. University of Minnesota, p. 152. Cayol, V., Cornet, F.H., 1998. Three-dimensional modeling of the 1983–1984 eruption at Piton de la Fournaise volcano, Reunion Island. J. Geophys. Res. 103, 18025–18037. Chang, W.L., Smith, R.B., Wicks, C., Farrell, J.M., Puskas, C.M., 2007. Accelerated uplift and magmatic intrusion of the Yellowstone caldera, 2004 to 2006. Science 318, 952–956. Clements, J.D., Mawer, C.K., 1992. Granitic magma transport by fracture propagation. Tectonophysics 204, 339–360. Daniels, K.A., Kavanagh, J.L., Menand, T., Stephen, J.S.R., 2012. The shapes of dikes: Evidence for the influence of cooling and inelastic deformation. Geol. Soc. Am. Bull. 124, 1102–1112. Delcamp, A., van Wyk de Vries, B., James, M.R., 2008. The influence of edifice slope and substrata on volcano spreading. J. Volcanol. Geotherm. Res. 177, 925–943. Di Giuseppe, E., Funiciello, F., Corbi, F., Ranalli, G., Mojoli, G., 2009. Gelatins as rock analogs: a systematic study of their rheological and physical properties. Tectonophysics 473, 391–403. Donnadieu, F., Merle, O., 1998. Experiments on the indentation process during cryptodome intrusions: new insights into Mount St. Helens deformation. Geology 26, 79–82. Duffield, W.A., Bacon, C.R., Delaney, P.T., 1986. Deformation of poorly consolidated sediment during shallow emplacement of a basalt sill, Coso Range, California. Bull. Volcanol. 48, 97–107. Fialko, Y., 2001. On origin of near-axis volcanism and faulting at fast spreading mid-ocean ridges. Earth Planet. Sci. Lett. 190, 31–39. Fialko, Y., Khazan, Y., Simon, M., 2001. Deformation due to a pressurized horizontal circular crack in an elastic half space, with applications to volcano geodesy. Geophys. J. Int. 146, 181–190. Fialko, Y., Simons, M., 2001. Evidence for on-going inflation of the Socorro magma body, New Mexico, from interferometric synthetic aperture radar imaging. Geophys. Res. Lett. 28, 3549–3552. Francis, E.H., 1982. Magma and sediment—1. Emplacement mechanism of late Carboniferous tholeiite sills in northern Britain. J. Geol. Soc., London 139, 1–20. Froger, J.L., Merle, O., Briole, P., 2001. Active spreading and regional extension at Mount Etna imaged by SAR interferometry. Earth Planet. Sci. Lett. 187, 245–258. Froger, J.L., Remy, D., Bonvalot, S., Legrand, D., 2007. Two scales of inflation at Lastarria–Cordon del Azufre volcanic complex, central Andes, revealed from ASAR-ENVISAT interferometric data. Earth Planet. Sci. Lett. 255, 148–163. Fukushima, Y., Cayol, V., Durand, P., 2005. Finding realistic dike models from interferometric synthetic aperture radar data: the February 2000 eruption at Piton de la Fournaise. J. Geophys. Res. 110, B03206. Fukushima, Y., Cayol, V., Durand, P., Massonnet, D., 2010. Evolution of magma conduits during the 1998–2000 eruptions of Piton de la Fournaise volcano, Réunion Island. J. Geophys. Res. 115, B10204. Galerne, C.Y., Galland, O., Neumann, E.-R., Planke, S., 2011. 3D relationships between sills and their feeders: evidence from the Golden Valley Sill Complex (Karoo Basin) and experimental modelling. J. Volcanol. Geotherm. Res. 202, 189–199. Galland, O., de Bremond d’Ars, J., Cobbold, P.R., Hallot, E., 2003. Physical models of magmatic intrusion during thrusting. Terra Nova 15, 405–409. Galland, O., Cobbold, P.R., Hallot, E., de Bremond d’Ars, J., 2006. Use of vegetable oil and silica powder for scale modelling of magmatic intrusion in a deforming brittle crust. Earth Planet. Sci. Lett. 243, 786–804. Galland, O., Planke, S., Malthe-Sørenssen, A., Neumann, E.-R., 2009. Experimental modelling of shallow magma emplacement: application to saucer-shaped intrusions. Earth Planet. Sci. Lett. 277, 373–383. Galland, O., 2012. Experimental modelling of ground deformation associated with shallow magma intrusions. Earth Planet. Sci. Lett. 317–318, 145–156. Geshi, N., Kusumoto, S., Gudmundsson, A., 2010. Geometric difference between non-feeder and feeder dikes. Geology 38, 195–198. Geshi, N., Kusumoto, S., Gudmundsson, A., 2012. Effects of mechanical layering of host rocks on dike growth and arrest. J. Volcanol. Geotherm. Res. 223–224, 74–82. Goulty, N.R., Schofield, N., 2008. Implications of simple flexure theory for the formation of saucer-shaped sills. J. Struct. Geol. 30, 812–817. Grandin, R., Socquet, A., Doin, M.P., Jacques, E., de Chabalier, J.B., King, G.C.P., 2010a. Transient rift opening in response to multiple dike injections in the Manda Hararo rift (Afar, Ethiopia) imaged by time-dependent elastic inversion of interferometric synthetic aperture radar data. J. Geophys. Res. 115, B09403. Grandin, R., Socquet, A., Jacques, E., Mazzoni, N., de Chabalier, J.B., King, G.C.P., 2010b. Sequence of rifting in Afar, Manda-Hararo rift, Ethiopia, 2005–2009: time-space evolution and interactions between dikes from interferometric synthetic aperture radar and static stress change modeling. J. Geophys. Res., B10413. Gressier, J.-B., Mourgues, R., Bodet, L., Matthieu, J.-Y., Galland, O., Cobbold, P.R., 2010. Control of pore fluid pressure on depth of emplacement of magmatic sills: an experimental approach. Tectonophysics 489, 1–13. Gudmundsson, A., 2002. Emplacement and arrest of sheets and dykes in central volcanoes. J. Volcanol. Geotherm. Res. 116, 279–298. Gudmundsson, A., 2003. Surface stresses associated with arrested dykes in rift zones. Bull. Volcanol. 65, 606–619. Gudmundsson, A., Loetveit, I.F., 2005. Dyke emplacement in a layered and faulted rift zone. J. Volcanol. Geotherm. Res. 144, 311–327. M.M. Abdelmalak et al. / Earth and Planetary Science Letters 359–360 (2012) 93–105 Gudmundsson, A., 2006. How local stresses control magma-chamber ruptures, dyke injections, and eruptions in composite volcanoes. Earth-Sci. Rev. 79, 1–31. Gudmundsson, A., Friese, N., Galindo, I., Philipp, S.L., 2008. Dike-induced reverse faulting in a graben. Geology 36, 123–126. Hansen, D.M., Cartwright, J.A., 2006. Saucer-shaped sill with lobate morphology revealed by 3D seismic data: implications for resolving a shallow-level sill emplacement mechanism. J. Geol. Soc., London 163, 509–523. Hubbert, M.K., 1937. Theory of scale models as applied to the study of geologic structures. Geol. Soc. Am. Bull. 48, 1459–1519. Hubbert, M.K., Willis, D.G., 1957. Mechanics of hydraulic fracturing. In: Hubbert, M.K. (Ed.), Structural Geology. Hafner Publishing Company, New York, pp. 175–190. Johnson, K.L., 1985. Contact Mechanics. Cambridge University Press. Kavanagh, J.L., Menand, T., Sparks, R.S.J., 2006. An experimental investigation of sill formation and propagation in layered elastic media. Earth Planet. Sci. Lett. 245, 799–813. Kavanagh, J.L., Sparks, R.S.J., 2011. Insights of dyke emplacement mechanics from detailed 3D dyke thickness datasets. J. Geol. Soc. 168, 965–978. Kervyn, M., Ernst, G.G.J., van Wyk de Vries, B., Mathieu, L., Jacobs, P., 2009. Volcano load control on dyke propagation and vent distribution: insights from analogue modeling. J. Geophys. Res. 114 (B03401), 03426. Koide, H., Bhattacharji, S., 1975. Formation of fractures around magmatic intrusions and their role in ore localization. Econ. Geol. 70, 781–799. Krantz, R.W., 1991. Measurements of friction coefficients and cohesion for faulting and fault reactivation in laboratory models using sand and sand mixtures. Tectonophysics 188, 203–207. Malthe-Sørenssen, A., Planke, S., Svensen, H., Jamtveit, B., 2004. Formation of saucer-shaped sills. In: Breitkreuz, C., Petford, N. (Eds.), Physical Geology of High-Level Magmatic Systems. Geological Society, London, Special Publications, pp. 215–227. Masterlark, T., 2007. Magma intrusion and deformation predictions: sensitivities to the Mogi assumptions. J. Geophys. Res. 112, B06419. Mastin, L.G., Pollard, D.D., 1988. Surface deformation and shallow dike intrusion processes at Inyo Craters, Long Valley, California. J. Geophys. Res., 13221–13235. Mathieu, L., van Wyk de Vries, B., Holohan, E.P., Troll, V.R., 2008. Dykes, cups, saucers and sills: analogue experiments on magma intrusion into brittle rocks. Earth Planet. Sci. Lett. 271, 1–13. Menand, T., 2008. The mechanics and dynamics of sills in layered elastic rocks and their implications for the growth of laccoliths and other igneous complexes. Earth Planet. Sci. Lett. 267, 93–99. Merle, O., Vendeville, B., 1995. Experimental modelling of thin-skinned shortening around magmatic intrusions. Bull. Volcanol. 57, 33–43. Merle, O., Borgia, A., 1996. Scaled experiments on volcanic spreading. J. Geophys. Res. 101, 13805–13817. Middleton, G.V., Wilcock, P.R., 1994. Mechanics in the Earth and Environmental Sciences. Cambridge University Press. Mogi, K., 1958. Relations between eruptions of various volcanoes and the deformations of the ground surfaces around them. Bull. Earthquake Res. Inst. Tokyo 36, 99–134. Mourgues, R., Cobbold, P.R., 2003. Some tectonic consequences of fluid overpressures and seepage forces as demonstrated by sandbox modelling. Tectonophysics 376, 75–97. Pedersen, R., Sigmundsson, F., 2006. Temporal development of the 1999 intrusive episode in the Eyjafjallajökull volcano, Iceland, derived from InSAR images. Bull. Volcanol. 68, 377–393. Petford, N., Kerr, R.C., Lister, J.R., 1993. Dike transport of granitoid magmas. Geology 21, 845–848. Phillips, W.J., 1974. The dynamic emplacement of cone sheets. Tectonophysics 24, 69–84. Pollard, D.D., 1973. Derivation and evolution of a mechanical model for sheet intrusions. Tectonophysics 19, 233–269. Pollard, D.D., Johnson, A.M., 1973. Mechanics of growth of some laccolithic intrusions in the Henry mountains, Utah, II: bending and failure of overburden layers and sill formation. Tectonophysics 18, 311–354. 105 Pollard, D.D., Holzhausen, G., 1979. On the mechanical interaction between a fluidfilled fracture and the earth’s surface. Tectonophysics 53, 27–57. Pollard, D.D., Segall, P., Delaney, P.T., 1982. Formation and interpretation of dilatant echelon cracks. Geol. Soc. Am. Bull. 93, 1291–1303. Pollard, D.D., Delaney, P.T., Duffield, W.A., Endo, E.T., Okamura, A.T., 1983. Surface deformation in volcanic rift zones. Tectonophysics 94, 541–584. Polteau, S.P., Mazzini, A., Galland, O., Planke, S., Malthe-Sørenssen, A., 2008. Saucer-shaped intrusions: occurrences, emplacement and implications. Earth Planet. Sci. Lett. 266, 195–204. Price, N.J., Cosgrove, J.W., 1990. Analysis of Geological Structures. Cambridge University Press. Ramberg, H., 1981. Gravity, Deformation and the Earth’s Crust. Academic Press, New York. Roman, D.C., Power, J.A., Moran, S.C., Cashman, K.V., Doukas, M.P., Neal, C.A., Gerlach, T.M., 2004. Evidence for dike emplacement beneath Iliamna Volcano, Alaska in 1996. J. Volcanol. Geotherm. Res. 130, 265–284. Rubin, A.M., Pollard, D.D., 1988. Dike-induced faulting in rift zones of Iceland and Afar. Geology 16, 413–417. Rubin, A.M., 1995. Getting granite dikes out of the source region. J. Geophys. Res. 100, 5911–5929. Schellart, W.P., 2000. Shear test results for cohesion and friction coefficients for different granular materials: scaling implications for their usage in analogue modelling. Tectonophysics 324, 1–16. Schiffman, P., Watters, R.J., Thompson, N., Walton, A.W., 2006. Hyaloclastites and the slope stability of Hawaiian volcanoes: Insights from the Hawaiian Scientific Drilling Project’s 3-km drill core. J. Volcanol. Geotherm. Res 151, 217–228. Schultz, R.A., 1995. Limits on strength and deformation properties of jointed basaltic rock masses. Rock Mech. Rock Eng. 28, 1–15. Schultz, R.A., 1996. Relative scale and the strength and deformability of rock masses. J. Struct. Geol. 18, 1139–1149. Spence, D.A., Turcotte, D.L., 1990. Buoyancy-driven magma fracture: a mechanism for ascent though the lithosphere and the emplacement of diamonds. J. Geophys. Res. 95, 5133–5139. Spera, F.J., 1980. Aspects of magma transport. In: Hargraves, R.B. (Ed.), Physics of Magmatic Processes. Princeton University Press, Princeton, NJ, pp. 265–323. Takada, A., 1994. Development of a subvolcanic structure by the interaction of liquid-filled cracks. J. Volcanol. Geotherm. Res. 61, 207–224. Tentler, T., 2005. Propagation of brittle failure triggered by magma in Iceland. Tectonophysics 406, 17–38. Thomas, M.E., Petford, N., Bromhead, E.N., 2004. Volcanic rock-mass properties from Snowdonia and Tenerife: implication for volcano edifice strength. J. Geol. Soc., London 161, 1–8. Valentine, G.A., Krogh, K.E.C., 2006. Emplacement of shallow dikes and sills beneath a small basaltic volcanic center—the role of pre-existing structure (Paiute Ridge, southern Nevada, USA). Earth Planet. Sci. Lett. 246, 217–230. Voight, B., 2000. Structural stability of andesite volcanoes and lava domes. Philos. Trans. R. Soc. A: Math., Phys. Eng. Sci. 358, 1663–1703. White, D.J., Take, W.A., Bolton, M.D., 2001. Measuring soil deformation in geotechnical models using digital images and PIV analysis. In: Proceedings of the 10th International Conference on Computer Methods and Advances in Geomechanics, Tucson, Arizona. White, D.J., Take, W.A., Bolton, M.D., 2003. Soil deformation measurement using particle image velocimetry (PIV) and photogrammetry. Géotechnique 53, 619–631. White, R.S., Drew, J., Martens, H.R., Key, J., Soosalu, H., Jakobsdóttir, S.S., 2011. Dynamics of dyke intrusion in the mid-crust of Iceland. Earth Planet. Sci. Lett. 304, 300–312. Woo, J.Y.L., Kilburn, C.R.J., 2010. Intrusion and deformation at Campi Flegrei, southern Italy: sills, dikes, and regional extension. J. Geophys. Res 115, B12210. Wright, T.J., Ebinger, C., Biggs, J., Ayele, A., Yirgu, G., Keir, D., Stork, A., 2006. Magma-maintained rift segmentation at continental rupture in the 2005 Afar dyking episode. Nature 442, 291–294.