Simulation in financial mathematics Martin Groth Växjö University
advertisement

Växjö University
Martin Groth
Simulation in financial
mathematics
Licentiate Thesis
School of Mathematics and Systems Engineering
Reports from MSI
c by Martin Groth. All rights reserved.
c by Martin Groth. All rights reserved.
Simulation in financial mathematics
c by Martin Groth. All rights reserved.
c by Martin Groth. All rights reserved.
Martin Groth
Simulation in financial mathematics
Licentiate Thesis
Applied Mathematics
Växjö University
c by Martin Groth. All rights reserved.
A thesis for the Degree of Licentiate of Philosophy in Applied Mathematics at Växjö University.
Simulation in financial mathematics
Martin Groth
Växjö University
School of Mathematics and Systems Engineering
se - Växjö, Sweden
http://www.vxu.se/
c by Martin Groth. All rights reserved.
Reports from MSI, no.
issn -
isrn vxu-msi-ma-r----se
c by Martin Groth. All rights reserved.
Abstract
This thesis examines numerical methods for mathematical problems with
applications in finance. The main focus is on markets driven by Lévy processes, and especially ones where the log-returns are normal inverse Gaussian distributed. We propose a new method to generate low-discrepancy
sequences and show that, used in quasi-Monte Carlo simulations, the sequences deliver fast and accurate results. We also study option pricing
problems in the stochastic volatility model by Barndorff-Nielsen and Shepard [12]. A utility indifference pricing problem for this model, in earlier
studies solved with a dynamic programming approach, results in a partial
difference equation with an integral-term. We propose finite difference
schemes for the problem and show that the output from the system is
consistent with our expectations. Option pricing can also be done using
the fast Fourier transform, and we demonstrate how to find prices for this
stochastic volatility model under structure-preserving measures. Another
study is conducted on root finding problems by combining quasi-Monte
Carlo with Newton’s method. For finding implicit parameters the method
displays promising results. In the last section we use Malliavin calculus
to simulate option price sensitivities in a jump-diffusion market. We use
a jump-diffusion approximation to calculate the sensitivities for markets
driven by a normal inverse Gaussian Lévy process.
Key-words: Financial mathematics, Numerical methods, quasi-Monte
Carlo methods, normal inverse Gaussian distribution, Integro-PDE, fast
Fourier transform, Lévy processes, Malliavin calculus, Newton’s method.
v
c by Martin Groth. All rights reserved.
Acknowledgments
Something’s going on. It has to do with that number.
There’s an answer in that number.
Maximillian Cohen in Pi
I would like to thank everyone who has helped me in any way on my journey through the land of mathematics. Especially I would like to thank my
two supervisors, Docent Roger Pettersson and Prof. Fred Espen Benth.
Roger is always enthusiastic about any problem in stochastic analysis and
I am very fortunate to have been a student of his during these years.
I am in deep debt to Fred Espen, who took me under his wings in
a difficult time for me. My gratitude for his help and encouragement is
hard to express. Fred Espen has a profound understanding of mathematics, finance and supervision and takes time to discuss any aspect of
these subjects. This thesis is as much a result of his impressive sense for
interesting problems in mathematical finance as my own work.
There are numerous persons who in different ways have been important. My fellow Ph.D. students Paul C. Kettler, Jonas Söderberg and Olli
Wallin who have shared their time and deep knowledge with me. Anders
Tengstrand is a rare source of mathematical inspiration whom I had the
pleasure to share office with. I appreciate the help and suggestions from
my assistant supervisor Prof. Kenneth H. Karlsen. The language in this
thesis bears the mark from the careful proofreading by Camilla Malm.
Without the superb Mac support delivered by Claes T. Malmberg I would
not have gotten far with my numerical simulations. To all my colleagues
both in Växjö and Oslo: Thank you for all enlivening coffee breaks. To
all my friends everywhere: Bless you all. Finally, I owe everything to my
parents Larsåke and Inger and my siblings Anna, Erik, Peter and Gustav
with families. Without your endless support this would never have happened.
This research has been conducted with funding from the research profile Mathematical modelling in Economics at Växjö University, a cooperation between the School of Mathematics and Systems Engineering and
vi
c by Martin Groth. All rights reserved.
the School of Management and Economics. I acknowledge the support
given to me by the project leaders Prof. Andrei Khrennikov and Prof.
Jan Ekberg. Part of the work was carried out while visiting the Centre of
Mathematics for Applications at the University of Oslo. I want to express
my gratitude for the opportunity to be a part of such a dynamic and impelling environment.
I’ve done all I can do
Could I please come with you?
Sweet smell of sunshine
I remember sometimes
Nine Inch Nails
Oslo, March 2005
Martin Groth
vii
c by Martin Groth. All rights reserved.
Contents
Abstract
v
Acknowledgments
vi
1 Introduction
1
2 Theory
2.1 Monte Carlo simulations and its Finance applications
2.2 Quasi-Monte Carlo methods in Finance . . . . . . . .
2.3 Lévy processes and stochastic volatility modelling . . .
2.4 Simulation in markets driven by Lévy processes . . . .
2.5 Malliavin calculus and option price sensitivities . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
4
4
12
25
30
37
3 Simulation in Financial mathematics
3.1 Low-discrepancy sequences for the normal inverse Gaussian
distribution . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.2 Option pricing in a Barndorff-Nielsen - Shepard UO-market
3.3 Root finding using quasi-Monte Carlo and Newton’s method
3.4 Calculating Greeks in a jump-diffusion market . . . . . . . .
40
Bibliography
99
viii
c by Martin Groth. All rights reserved.
42
56
80
90
Chapter 1
Introduction
Mathematical finance is a fast evolving branch of mathematics, with a
demanding industry pushing hard for new developments. In this field
new numerical methods are a rewarding to study. Lots of research has
been done but since the field is in constant evolution there are always
new problems surfacing which need to be solved numerically. The main
option pricing theory, the Black-Scholes theory from the early seventies,
gives explicit solutions for the most basic options, and there is no need for
finding more complicated ways to get a price. But as soon as the model
gets more involved option pricing gets more difficult. There are many different ways to make a working model for the evolution of the stock market
and a substantial amount of models has been proposed already. At the
moment, a lot of interest is centered around models driven by Lévy processes. They are a more general than the Brownian motion involved in the
Black-Scholes model and allow jumps in the price of the underlying asset.
It is well known that real data from stock exchanges experience jumps and
that the empirical distributions have fatter tails than the Black-Scholes
theory gives. Using Lévy processes it is possible to get a better agreement
between the predictions from the model and the empirical distributions.
To price options in models driven by Lévy processes we often have
to rely on numerical methods. We may find suitable partial differential
equation formulations which we can solve with, for example, the finite difference method. This is a reliable method which can be quick, but mainly
when the problem only has a few dimensions. In higher dimensions it
rapidly gets computationally demanding to solve partial differential equations. This curse of dimension is nothing Monte Carlo methods suffer
from. Monte Carlo is a workhorse which can be loaded with almost anything we want to solve, and therefore it is also the method which is most
1
c by Martin Groth. All rights reserved.
Chapter 1. Introduction
used in the industry. It is very reliable and, as mentioned, works just as
well in higher dimensions. But nothing is perfect and for demanding tasks,
Monte Carlo is not always fast enough for the industry. On the contrary,
speed is one of the main advantages of the fast Fourier transform. This
swift algorithm has during the last years found a use in option pricing
problems, as we shall see below.
In this thesis we study some numerical methods for models with Lévy
processes. The applications are mostly option pricing problems but we
also consider other problems such as Value-at-Risk and calculation of option price sensitivities. The methods used are the above mentioned Monte
Carlo method, solving partial differential equations with the finite difference method and the fast Fourier transforms. A lot of interest in this
thesis is focused on the normal inverse Gaussian distribution which is a
distribution known to give good fit to daily log-returns from stock markets. To begin with we give a brief introduction to the theory we base our
research on. This is the general asset pricing theory, the theory behind
Monte Carlo simulations and the way we use low-discrepancy sequences
to get better convergence properties. We introduce a stochastic volatility
model and an indifference pricing problem related to the model. Finally we
consider how to compute the Greeks, option price sensitivities, for which
we need to introduce some basic Malliavin calculus.
In Chapter 3 research is presented on various problems. We introduce
a new way of generating low-discrepancy sequences for the normal inverse
Gaussian distribution. The sequences are used in option pricing problems
and compared with other methods, including another way of generating
low-discrepancy sequences. We also study option pricing problems in a
stochastic volatility model using the fast Fourier transform. The same
model is then studied in an indifference pricing problem which leads to
a partial differential equation with an integral part. We develop a finite
difference solver for this integro-PDE and compare the results with the
Black-Scholes model. In finance there are problems which can be cast
as root finding problems, such as calculating Value-at-Risk and finding
parameters from quoted market prices. We combine the fast convergence
of quasi-Monte Carlo with the root finding capability of the Newton’s
method to solve such problems. In the last section we use Malliavin calculus to find option price sensitivities in a jump-diffusion market and also
2
c by Martin Groth. All rights reserved.
show that this gives approximations to the sensitivities in a market driven
by a normal inverse Gaussian Lévy process.
Seeing that this thesis deals with numerical methods it is notably free
from convergence results. So far we have concentrated on the numerical
methods and implementations of these. Our intention is to carry on this
research, and include convergence analysis of our methods in forthcoming
articles. Most of the research is done in collaboration with Professor
Fred Espen Benth, with Mr Paul C. Kettler contributing in the section
about quasi-Monte Carlo and Newton’s method. The exception is the
part about Malliavin calculus and option price sensitivities which is joint
research with Docent Roger Pettersson.
3
c by Martin Groth. All rights reserved.
Chapter 2
Theory
2.1
Monte Carlo simulations and its Finance applications
Monte Carlo methods have over the years become indispensable tools in
many areas, including financial engineering. A Monte Carlo method is basically only a numerical method based on random sampling, but the most
elementary application is for numerical integration. Numerical integration
is also the starting point for many of the introductions to Monte Carlo.
Assume that your problem can be cast as an integration over some measure, for which you know how to generate suitable random numbers from.
Then Monte Carlo integration is the easy task of sampling sequences of
random numbers and using these to evaluate the integrand. The sample
mean gives a probabilistic approximation to the integral and is one possibility to get a numerical value for the integral. When it is not possible to
get an analytic solution, this probabilistic approach may prove to be very
useful. But all coins have two sides and for Monte Carlo there are several
drawbacks.
Computers work with floating numbers for numerical solutions and it is
futile to expect exact numerical results. However, the law of large numbers
will guarantee that a Monte Carlo method converges towards the desired
answer. Due to the often very easy implementation and the computational
power accessible today, it can be a quick and safe method to begin with.
In many circumstances it is the only possible method because the problem
is framed in high dimensions or under additional limitations that leave no
opening for other methods. The disadvantages of Monte Carlo are well
known, the main thing being the slow convergence which makes it reliant
on computational power and time. In general there is little we can do to
4
c by Martin Groth. All rights reserved.
2.1. Monte Carlo simulations and its Finance applications
speed up the convergence, but many strategies to influence the inherent
constant in the convergence rate have been proposed. Examples of such
are variance reduction methods such as control variates and importance
sampling. These are not discussed here, readers are referred to Glasserman
[37] for more information. A different approach is to use quasi-Monte
Carlo (qMC), a method with other properties which we will discuss at
length below, together with its use in financial engineering. The more
intrinsic nature of Monte Carlo methods will not be discussed here, those
interested are referred to Fishman [33].
We commence the presentation of Monte Carlo with the problem of
integrating a function f (x) over the unit interval,
1
f (x) dx.
0
Introducing the Lebesgue measure we can represent the evaluation of
this integral as the approximative calculation of an expectation E[f (U )]
over the interval, U ∼ Unif[0, 1]. This expectation can be estimated by
sampling points uniformly from the interval, resulting in the sequence
a1 , . . . , an , and then taking the sample mean over these points
1
f (ai ).
E[f (U )] ≈
n
n
i=1
The strong law of large numbers guarantees that this estimate converges
almost surely, i.e.
n
1
f (ai ) = E[f (U )]
lim
n→∞ n
i=1
with probability 1. One of the disadvantages with Monte Carlo is that the
error we introduce by replacing the expectation with the sample mean is
only a probabilistic measure. If f is square integrable and we set
1
2
(f (x) − E[f (U )])2 dx
σ (f ) =
0
then the standard error in the Monte Carlo estimate is approximately nor√
mal distributed with mean zero and standard deviation σ(f )/ n. Hence,
5
c by Martin Groth. All rights reserved.
Chapter 2. Theory
the Monte Carlo integration yields a probabilistic error bound of order
O(n−1/2 ). The order of the error may seem to be significant compared
to the error when integrating with the trapezoidal rule, which has an error of order O(n−2 ) provided the function has continuous second derivatives. But in contrary to the trapezoidal rule the convergence rate for
Monte Carlo is not depending on dimension. When the trapezoidal rule
in dimension d has an error bound O(n−2/d ) the error for Monte Carlo
remains as O(n−1/2 ). The Monte Carlo error bound is neither restricted
to the unit interval, it could just as well be extended to the whole real
line or Rd . Therefore Monte Carlo integration becomes more attractive
in higher dimensions. That said, there are many problems left unmentioned. Niederreiter [68] lists the following points as deficiencies of the
Monte Carlo method for numerical integration:
1. There are only probabilistic error bounds;
2. The regularity of the integrand is not reflected;
3. Generating random samples is difficult.
The Black-Scholes formula and partial differential equation (PDE) approach provide means to price vanilla claims in a consistent way. The
methods were developed by Black, Scholes and Merton who made the
breakthrough for systematic pricing of options in the early seventies. Since
then the financial markets, the competition and the ingeniousness among
the traders have literally exploded, resulting in an apparently never-ending
stream of new and exotic claims. The Black-Scholes framework is not the
only model proposed. There has been a lot of effort invested in new models
for the development of the underlying assets. For more complicated financial derivatives, or models with other types of driving noise than Brownian
motion, the Black-Scholes approach might not be a viable route to arrive
at a price for a claim. Where no analytic answer can be obtained different
numerical methods may be the only choice. A Monte Carlo method is an
instrument which is incredibly flexible and usable under such premises. If
we know how to generate random numbers from the desired distribution,
then it requires, in its basic form, little extra analytic work to get started.
In the limit it will, due to the law of large numbers, give a correct answer.
6
c by Martin Groth. All rights reserved.
2.1. Monte Carlo simulations and its Finance applications
The key to use Monte Carlo simulation in finance is that we may write
the price of an option as the expectation of the payoff depending on the
stochastic development of the asset price. Monte Carlo simulations are
suitable for this problem since their main function is to calculate expectations. They are especially suitable since the number of dimensions for
many finance problems turns out to be high or even infinite. Many other
numerical approaches, such as solving PDEs, become hard to handle when
we get above a few dimensions. Monte Carlo methods, on the contrary,
are not significantly harder to work with in higher dimensions than in few.
Starting with Boyle [21] in 1977, the research on Monte Carlo methods
in finance has since then increased rapidly. Driven by the momentum behind the development of faster CPUs the use of Monte Carlo, which might
has been regarded too expensive in computational power, is now a tool
accessible to everyone with a new computer. The research into new methods has not halted because of the development of more efficient computers
though. Boyle et al. [20] contains references to some of the applications
of Monte Carlo in finance during the eighties and nineties including variance reduction techniques and low-discrepancy sequences. A short and
comprehensive summary can also be found in Lehoczky [56]. Monte Carlo
methods were for long considered incapable to apply to pricing problems
involving options with American exercise. However, methods have been
proposed to handle American options as well, see Tilley [87], Broadie and
Glasserman [22]. Practitioners may find the book by Jäckel [47] instructive. Otherwise, the book by Glasserman [37] is an excellent source for
information on basically every aspect of Monte Carlo methods in finance,
including a long list of the most important references.
2.1.1
The Martingale approach to Asset pricing
What follows is a concise exposition of the theory for derivative pricing
to shed some light on how to price claims with Monte Carlo. It closely
follows Chapter 10 in Björk [18]. This is on no account a full treatment of
the subject, that is a task left to writers of textbooks such as Benth [14],
Björk [18], Duffie [28] or Musiela and Rutkowski [65]. Those interested in
reading some of the original work in the field of arbitrage pricing or seeking
proofs of the theory below can look up the following articles: Black and
7
c by Martin Groth. All rights reserved.
Chapter 2. Theory
Scholes [19], Merton [61], Harrison and Kreps [41], Harrison and Pliska
[42] and Delbaen and Schachermeyer [25, 26].
To be able to deal with claims there has to be a way to attribute a
price to them in a manner such that there is no possibility to make money
out of nothing. The possibility to make a profit without risking any loss is
called arbitrage and to make a working theory for financial derivatives it is
necessary that there are no arbitrage opportunities. This idea of arbitrage
is fundamental and the quest is to find conditions such that the market
model is arbitrage-free. As will be showed later, absence of arbitrage is
closely connected to the existence of equivalent martingale measures which
will make the (discounted) price processes of the T -claim into martingales,
concepts which will be defined below.
In the Black-Scholes framework martingale pricing comes naturally
from arbitrage considerations but for more complicated models this is not
the case. The Martingale approach started with Harrison and Kreps [41]
and Harrison and Pliska [42]. The latter originally considered trading
strategies h(t) = hi (t), i = 1, . . . , n which only allowed for simple predictable integrands. This constraint ruled out unfavorable trading strategies such as the ”doubling strategy” but was still too restrictive. Delbaen
and Schachermeyer [25] replaced No arbitrage with the concept of No Free
Lunch with Vanishing Risk (NFLVR). The difference between the concepts
is a question of functional analysis definitions, i.e. choosing space to work
in, and is left to the reader to find out from the references. Instead of only
considering simple predictable integrands the NFLVR-concept opened up
for the possibility to include a larger group of strategies restricted to be
admissible.
Consider a market consisting of n traded risky assets whose evolutions are strictly positive and described by a filtered probability space
(Ω,F,{Ft },P). A real adapted process {Xt , t ≥ 0} is a martingale if
E[|Xt |] < ∞,
E[Xt |Fs ] = Xs
(2.1)
∀ 0 ≤ s ≤ t ≤ ∞.
(2.2)
If there exists a nondecreasing sequence of stopping times {τk } of the
filtration {Ft } such that Xt∧τk is a martingale for all k, then Xt is called
a local martingale. Let X denote a contingent claim with maturity T ,
referred to as a T -claim.
8
c by Martin Groth. All rights reserved.
2.1. Monte Carlo simulations and its Finance applications
Assume that the risky asset prices S(t) = [S0 (t) · · · Sn (t)]T develop
according to some underlying stochastics. In the Black-Scholes market the
assets follow stochastic differential equations driven by Wiener processes,
but for the general martingale pricing the stochastics are allowed to be
semi-martingales, see Protter [78]. S0 is often thought of as the risk-free
asset in the market, a bank account with short rate r. In the general
theory the only assumption is that S0 (t) > 0 P-a.s. for all t ≥ 0.
Instead of looking at the price vector process S(t), consider the normalised market with price vector process
Sn (t)
S1 (t)
,...,
.
(2.3)
Z(t) = [Z0 (t), . . . , Zn (t)] = 1,
S0 (t)
S0 (t)
Here S0 is used as the numeraire and in the Z-economy Z0 (t) = 1 is a riskfree asset, a money account with zero interest rate. Still, it is necessary
to narrow down the class of strategies to avoid cases such as the doubling
strategy. One common way is the following:
Definition 2.1.
• A portfolio strategy is any adapted (n + 1)-dimensional process
h(t) = [h0 , h1 , . . . , hn (t)].
• The S-value process V S (t; h) corresponding to the portfolio h is
given by
n
hi (t)Si (t).
V S (t; h) =
i=0
• The Z-value process V Z (t; h) corresponding to the portfolio h is
given by
n
Z
hi (t)Zi (t).
V (t; h) =
i=0
• An adapted process hZ = [h1 , . . . , hn ] is called admissible if there
exists a nonnegative real number α such that
t
hZ (u) dZ(u) ≥ −α for all t ∈ [0, T ].
0
9
c by Martin Groth. All rights reserved.
Chapter 2. Theory
A process h(t) = [h0 (t) hZ (t)] is called an admissible portfolio
process if hZ is admissible.
• An admissible portfolio is said to be S-self-financing if
dV S (t; h) =
n
hi (t) dSi (t).
i=1
• An admissible portfolio is said to be Z-self-financing if
dV Z (t; h) =
n
hi (t) dZi (t).
i=1
The choice of numeraire is not crucial for the concept of self-financing
portfolios as it can be proved that a portfolio h is S-self-financing if and
only if it is Z-self-financing. Adding to this, a contingent claim X is
said to be reachable if there exists a portfolio h such that V h (T ) = X.
This extends straightforward to definitions of S-reachable and Z-reachable
claims.
Before the fundamental theorem of asset pricing can be stated the
notion of equivalent martingale measures has to be properly defined. Two
separate probability measures P and Q on a measurable space (X, F) are
said to be equivalent (∼) if they define the same set of possible events, i.e.
P ∼ Q : ∀A ∈ F
Q(A) = 0 ⇐⇒ P(A) = 0.
Definition 2.2. A probability measure Q on FT is called an equivalent
martingale measure for the market model given by Z(t), the numeraire
S0 and the time interval [0, T ] if it has the following properties:
• Q ∼ P on FT .
• All price processes Z0 , Z1 , . . . , Zn are martingales under Q on the
time interval [0, T ].
If Z0 , Z1 , . . . , Zn are local martingales under Q it is called a local martingale measure.
10
c by Martin Groth. All rights reserved.
2.1. Monte Carlo simulations and its Finance applications
Theorem 2.1 (First fundamental theorem of asset pricing). Consider the market model S0 , S1 , . . . , Sn where it is assumed that S0 (t) > 0
P-a.s for all t ≥ 0. Assume furthermore that S0 , S1 , . . . , Sn are locally
bounded. Then the following conditions are equivalent:
• The model satisfy NFLVR.
• There exists a measure Q ∼ P such that the processes Z0 , Z1 , . . . , Zn
defined in (2.3) are local martingales under Q.
The proof of the first fundamental theorem involves quite a lot functional analysis and gets rather involved. See Delbaen and Schachermeyer
[25] for a proof in the case of bounded price processes. Since it is denoted
the first fundamental theorem, clearly there has to be a second. It states
that if the market is free of arbitrage, then the market is complete, i.e. all
contingent claims are reachable, if and only if the equivalent martingale
measure is unique.
With the fundamental theorems stated this short theory part has finally come to the question of martingale pricing. Having a T -claim X,
what is a reasonable price process Π(t; X)? It should be clear from the first
fundamental theorem that the price has to be consistent with the market S(t) and that including the claim in the market can not give rise to
any arbitrage possibilities. For the extended market {Π(t; X), S0 , . . . , Sn }
there must then exist a local martingale measure Q. Using the definition
of a martingale (2.1)-(2.2), the first fundamental theorem states that the
price process divided by the numeraire is a martingale, hence
Π(t; X) X Π(t; X)
Q
= EQ
F
Ft .
=
E
t
S0 (t)
S0 (t) S0 (t) This gives the last theorem, the basis for pricing options with Monte Carlo:
Theorem 2.2 (General pricing formula). The arbitrage-free price process for the T -claim X is given by
X Q
Ft ,
Π(t; X) = S0 (t) E
S0 (T ) where Q is a local martingale measure for the a priori given market
S0 , S1 , . . . , Sn with S0 as the numeraire.
11
c by Martin Groth. All rights reserved.
Chapter 2. Theory
Assuming that there exists a short rate r(t) the price process is given
by the famous risk neutral pricing formula
RT
Π(t; X) = EQ e− t r(s) ds X Ft ,
Rt
with the money account S0 (t) = S0 (0) e 0 r(s) ds as the numeraire. What
is left is to determine the claim X and the dynamics of the underlying
assets, and some way to sample paths for the assets. We will later discuss
different models proposed to model the dynamics of asset prices, especially
markets driven by Lévy processes of the normal inverse Gaussian type.
2.2
Quasi-Monte Carlo methods in Finance
Albeit very nice, Monte Carlo methods have some drawbacks. Due to the
apparent randomness of the numbers the error bound is only probabilistic
and converges as O(n−1/2 ). But clearly, there are sets of points that will
converge faster than this rate. The usual example is to divide the unit
interval according to a Cartesian grid with n points and sample the points
only once in any order. Then we have a simple deterministic scheme with
convergence in order of O(n−1 ). This procedure is disregarded on the
basis that we then need to know the number of points in advance to form
the grid. This rules out the possibility to sample until we meet a terminal
condition, for example some convergence requirement.
The concepts behind quasi-Monte Carlo methods and Low-discrepancy
sequences is a formalisation of the idea of how to be able to sample
a sequence of deterministic numbers which fills the interval or space in
an evenly distributed way. The sequences distinguish themselves from a
Cartesian grid in such a sense that we can sample repeatedly and still retain an even distribution of the point in the sense of discrepancy. This is a
notion of uniformity described below. Since these sequences do not try to
mimic randomness, as the pseudo-random sequences used in Monte Carlo
methods, the error when using low-discrepancy sequences in numerical integration is deterministic. The notion of low-discrepancy is reserved for
sequences with a convergence rate of order O(log(n)d n−1 ) in d-dimensions
and with sufficient regular integrands. In low dimensions this is clearly
12
c by Martin Groth. All rights reserved.
2.2. Quasi-Monte Carlo methods in Finance
better than the Monte Carlo error bound, and it has the extra benefit that
the bound is deterministic. However, in higher dimensions the advantage
over Monte Carlo methods is not as prominent since the error bound is
depending on the dimension. But, as pointed out by Glasserman [37], for
some problems in finance these methods are still more effective even in
dimensions up to 150.
The use of low-discrepancy sequences in finance started surprisingly
late, with the first articles on the subject not appearing until the midnineties. From then on a quite substantial amount of research was obtained during a few years, applying low-discrepancy sequences to different
option pricing problems. Joy et al. [51] used Faure sequences to price a variety of options including vanilla calls and Asian options. Faure sequences
was also the choice of low-discrepancy sequence when Papageorgiou and
Paskov [73] estimated Value-at-Risk for portfolios of stocks and mortgage
obligations. The results from quasi-Monte Carlo in their study were superior compared to Monte Carlo. Both Papageorgiou and Paskov appear
in many of the early research papers, together with Traube, see Paskov
[75], Paskov and Traube [76] and Papageorgiou and Traube [74].
To use the sequences for numerical integration problems in finance we
need to establish the theoretical base. The theory behind low-discrepancy
sequences is rather involved, with connections to number theory. Consider
again the problem of pricing options as an expectation of a function over
the half open unit interval I d = [0, 1)d :
E[f (X)] =
f (x) dx
Id
where X is uniformly distributed on I d . As for Monte Carlo integration,
we have the quasi-Monte Carlo approximation
1
f (x) dx ≈
f (xi )
n
Id
n
(2.4)
i=1
where the points x1 , . . . , xn are sampled from a d-dimensional low-discrepancy sequence. These points are crafted to be deterministic points which
fill out the unit interval. The law of large numbers will also in this case
13
c by Martin Groth. All rights reserved.
Chapter 2. Theory
guarantee that in the limit the error in this approximation will tend to
zero.
Discrepancy is the measure used to describe how our point set is distributed compared to a uniform distribution and hence, it is a measure
of deviation from uniformity. There are a few different notions of discrepancy where the star discrepancy and the extreme discrepancy are the
most important. Given a nonempty family of Lebesgue-measurable subsets B ∈ I d and a point set P = {x1 , . . . , xn }, then the discrepancy of P
is given as
n
i=1 χ(xi ; B)
− λd (B)
D(P ; B) = sup n
B∈B
where λd denotes the d-dimensional Lebesgue-measure and χ the characteristic function. It is clear that we always have 0 ≤ D(P ; B) ≤ 1, and
we may note that a definition of a uniformly distributed infinite sequence
x1 , x2 , . . . ∈ [0, 1] is
1
χ(xi ; B) = λd (B)
n→∞ n
n
lim
i=1
for all subintervals B ∈ I d . By more specific definitions of the family of
subsets B we obtain different concepts of discrepancy:
Definition 2.3. Taking B to be the collection of all subsets of I d of the
form
d
[0, ui )
i=1
yields the star discrepancy D∗ (P ) for the point set P .
Definition 2.4. Taking B to be the collection of all subsets of I d of the
form
d
[ui , vi )
i=1
yields the (extreme) discrepancy, often referred to as the ordinary discrepancy, D(P ) for the point set P .
14
c by Martin Groth. All rights reserved.
2.2. Quasi-Monte Carlo methods in Finance
In some circumstances we might want to specify the number of points
used in the sequence and indicate this by a subscript, i.e. Dn∗ (P ). It is easy
to see that the star discrepancy is no larger than the ordinary discrepancy,
actually Niederreiter [68] establish the following relation:
D ∗ (P ) ≤ D(P ) ≤ 2d D∗ (P ).
The intervals used in the above definitions of discrepancy might seem
a bit too restrictive, especially if we consider integration domains more
general than the multi-dimensional unit interval. Remaining in the unit
interval for convenience, discrepancy could just as well be defined on a
family of convex subsets of I d , which leads to the concept of isotropic
discrepancy:
Definition 2.5. Taking B to be the collection of all convex subsets of
C ∈ I d yields the isotropic discrepancy J(P ) = D(P ; C).
Isotropic discrepancy lets us work with more natural subsets but has
the drawback that it depends more heavily on the dimension, i.e. the
isotropic discrepancy has the following error bound in terms of the ordinary discrepancy:
1
D(P ) ≤ J(P ) ≤ 4dD(P ) /d .
Because of their discrepancy properties, and the use of this concept
in establishing convergence bounds, which will be covered later on, a lot
of interest has been invested in finding low-discrepancy sequences. What
we have to answer is the question: when can a point set P in I d be said
to have low-discrepancy? Clearly, in one dimension, given the number of
points in P beforehand, we can spread the points on a grid and thereby
minimise the discrepancy. Actually, we always have that
D ∗ (P ) ≥
1
2n
with equality when distributing the points on a grid. In higher dimensions,
and for cases where we have an infinite sequence of points, but where we
only consider the first n points in the sequence, there is not any such lower
bound established. It is, according to Niederreiter [68] widely believed that
15
c by Martin Groth. All rights reserved.
Chapter 2. Theory
the star discrepancy of any d-dimensional point set P consisting of n points
satisfies
log(n)d−1
.
D∗ (P ) ≥ cd
n
It is therefore usual to refer to sequences as low-discrepancy sequences if
they have star discrepancy in order of O(log(n)d /n). Although the log(n)d
becomes insignificant to the n−1 term as the number of points increases
this might not be relevant for manageable point sets if the d is large.
Quasi-Monte Carlo has therefore traditionally been considered inferior to
Monte Carlo in higher dimensions.
So far nothing has been said about how to construct specific sequences
which will have the desired discrepancy, but rest assure, there is plenty of
theoretical work on this subject. Different sequences have been proposed
over the years, with different properties but in many aspects very alike.
The basis for some of the sequences is the van der Corput sequences which
are a natural starting point when trying to unfold the theory. Let b be any
integer such that b ≥ 2 and put Zb = {0, 1, . . . , b−1}, that is Zb is the least
residue system mod b. Every integer n ≥ 0 has a unique representation as
a linear combination of nonnegative powers of b with coefficients aj ∈ Zb
called its base-b:
∞
aj (n)bj .
n=
j=0
The sum is finite since aj (n) = 0 for sufficiently large j. The radicalinverse function ψb in base b is defined as
ψb (n) =
∞
aj (n)b−j−1
for all integers n ≥ 0.
(2.5)
j=0
Here n is given by its base-b and ψb is then the function that maps each n
to a point in [0, 1) by a symmetric reflection about the base-b ”decimal”
point. If we for convenience number our sequence in increasing order as
n = 0, 1, . . . we can define the van der Corput sequence in base b as the
sequence {x0 , x1 , . . .} such that xn = ψb (n) for all n ≥ 0.
The workings of the van der Corput sequences are to fill out the unit
interval by adding points in a maximally balanced way. Borrowing an
16
c by Martin Groth. All rights reserved.
2.2. Quasi-Monte Carlo methods in Finance
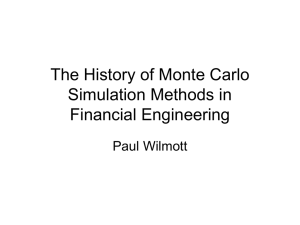
illustration from Glasserman [37] we can see how the van der Corput
sequence in base 2 works in Figure 2.1. Counting from the top, every line
in the figure shows the first numbers up until the order of the line number.
As can be seen the sequence adds numbers on each half alternating and in
such a manner that is withholds an equal balance of points on each half.
So, instead of adding the numbers in an increasing order, the points are
added such that the interval is filled in a balanced way. Every van der
Corput sequence is a low-discrepancy sequence although this is of limited
use since van der Corput sequences are defined only in one dimension.
The restriction of the van der Corput sequences to one dimension is
not really a problem, as was shown by Halton and Hammersley [40], leading up to what is now denoted as Halton sequences. This is the easiest
construction of low-discrepancy sequences in arbitrary dimensions. It is
based on van der Corput sequences by assuming that b1 , . . . , bd are relatively prime integers greater than 1. Again using the radical inverse
function ψb defined in (2.5) the Halton sequence in the bases b1 , . . . , bd is
the sequence
xn = (ψb1 (n), . . . , ψbd (n)) ∈ I d
for all n ≥ 0.
The Halton sequence in dimension d has a star discrepancy bounded by
D ∗ (Pn ) ≤ Cd n−1 log(n)d + O(n−1 log(n)d−1 ) for a point set P of the first
n points and is, hence, a low-discrepancy sequence. The coefficient Cd
depends on the relatively prime numbers bi , i = 1, . . . , d but not on n. The
sequences display good uniformity in low dimensions but as the number of
dimensions increases their quality falls rapidly. In numerical tests Halton
sequences are in most cases performing worse than other low-discrepancy
sequences. In high dimensions the sequence is produced by van der Corput
sequences with large bases, resulting in long monotone segments. This
behaviour is unfavorable and other low-discrepancy sequences, building
upon Halton and Hammersley’s work, try to avoid this.
The above is no more than a brief introduction to the basis of lowdiscrepancy sequences, to explain the theory behind low-discrepancy and
the usage of the concept. Other sequences with better properties such as
Sobol [84], Faure [32] and Niederreiter [67] sequences have developed from
here. Since they are later work they are inherently also more complicated
17
c by Martin Groth. All rights reserved.
Chapter 2. Theory
1
16
1
16
1
16
1
16
1
16
1
16
1
16
1
16
1
8
1
8
1
8
1
8
1
8
1
8
1
8
1
8
1
8
1
8
1
8
1
8
3
16
3
16
3
16
3
16
1
4
1
4
1
4
1
4
1
4
1
4
1
4
1
4
1
4
1
4
1
4
1
4
1
4
1
4
5
16
5
16
5
16
5
16
5
16
5
16
3
8
3
8
3
8
3
8
3
8
3
8
3
8
3
8
3
8
3
8
7
16
7
16
1
2
1
2
1
2
1
2
1
2
1
2
1
2
1
2
1
2
1
2
1
2
1
2
1
2
1
2
1
2
9
16
9
16
9
16
9
16
9
16
9
16
9
16
5
8
5
8
5
8
5
8
5
8
5
8
5
8
5
8
5
8
5
8
5
8
11
16
11
16
11
16
3
4
3
4
3
4
3
4
3
4
3
4
3
4
3
4
3
4
3
4
3
4
3
4
3
4
13
16
13
16
13
16
13
16
13
16
7
8
7
8
7
8
7
8
7
8
7
8
7
8
7
8
7
8
Figure 2.1: Illustration of the van der Corput sequence in
base 2. Every row represents a point set consisting of the
number of points equal to the row number counting from
the top. Hence, the first row is the point set consisting
of {1/2}, the second row is the point set {1/4, 1/2} and so
forth.
18
c by Martin Groth. All rights reserved.
15
16
2.2. Quasi-Monte Carlo methods in Finance
and the construction of these sequences will be left to the reader to find
out about. A concise examination including implementations and their
use in financial engineering can be found in Glasserman [37].
2.2.1
The Koksma-Hlawka error bound
Discrepancy plays a vital role in the Koksma-Hlawka inequality. This
explains much of the great interest put into finding low-discrepancy sequences, while discrepancy itself is a rather theoretical concept. The
Koksma-Hlawka inequality is a classic result providing a bound on the
error introduced when substituting the integral with a sum and evaluating the integrand over a low-discrepancy sequence, such as in (2.4). As
will be demonstrated below, this bound is a product of two terms, one
term indicating the variation of the function being integrated, and the
other term being the star discrepancy of the sequence used in the sum.
Logically, if our sequence has low discrepancy, then clearly the integration
error will be smaller than if a sequence without this property is used. The
result builds on a one-dimensional result by Jurjen Koksma from 1942
which was extended by Edmund Hlawka in 1961.
To establish the Koksma-Hlawka error bound we need an appropriate
concept of total variation of the integrand function f , possibly depending
on several variables. For this, we assume f is defined and finite on the
closed hypercube I¯d = [0, 1]d and let J be a subinterval of I¯d of the form
+
− +
− +
J = [u−
1 , u1 ] × [u2 , u2 ] × · · · × [ud , ud ],
+
where 0 ≤ u−
i ≤ ui ≤ 1, i = 1, . . . , d. Hence, all vertices of J are of
±
the form ui . Let ∆(f ; J) be an alternating sum of the values of f at the
vertices of J. That is, letting E(J) be the set of vertices of J with even
number + superscripts, u+
i , and O(J) contain those with odd number,
then
f (u) −
f (u).
∆(f ; J) =
u∈E(J)
u∈O(J)
To understand this we observe that function values at adjacent vertices
has opposite signs, and ∆(f ; J) is a sum of how much the function changes
at the vertices of J. Let P be the set of all partitions of I¯d into rectangles
19
c by Martin Groth. All rights reserved.
Chapter 2. Theory
of the form J. The variation of f in the sense of Vitali is then defined as
V (d) (f ) = sup
P J∈P
|∆(f ; J)|.
For any 1 ≤ k ≤ d and 1 ≤ i1 < i2 < · · · < ik ≤ d, let V (k) (f ; i1 , . . . , ik ) be
the variation in the sense of Vitali of the function defined by restricting
f to the k-dimensional face {(u1 , . . . , ud ) ∈ I¯d : uj = 1 for j = i1 , . . . , ik }.
Then the variation of f on I¯d in the sense of Hardy and Krause is defined
as
d
V (f ) =
V (k) (f ; i1 , . . . , ik )
k=1 1≤i1 <i2 <···<ik ≤d
and f is of bounded variation in the sense of Hardy-Krause if V (f ) is
finite. With this concept of variation of f established the path has finally
reached the main theorem:
Theorem 2.3 (The Koksma-Hlawka inequality). If f has bounded
variation in the sense of Hardy-Krause on I¯d , then for any set of points
x1 , . . . , xn ∈ I d we have
n
1 f (xi ) −
f (u) du ≤ V (f )D ∗ (x1 , . . . , xn ).
(2.6)
n
d
I
i=1
This error bound provides a strict deterministic bound on the integration error but is merely of theoretical value. Both the Hardy-Krause
variation and the star discrepancy are difficult to compute, sometimes to
the extent that computing the integral itself would be easier. It is therefore of limited application as a practical error bound. Glasserman [37]
writes that computing the Koksma-Hlawka bound often grossly overestimates the error. He also notes that the condition that V (f ) must be finite
is too restrictive and often violated in finance applications. For convex integration domains Niederreiter [68] provides a Koksma-Hlawka inequality
involving the isotropic discrepancy.
The Koksma-Hlawka bound (2.6) is stated only for the unit hypercube
and the Lebesgue measure but using slightly different definitions Kainhofer
20
c by Martin Groth. All rights reserved.
2.2. Quasi-Monte Carlo methods in Finance
[52] provides a Koksma-Hlawka bound for general measures and domains.
Kainhofer investigates integration problems of the kind
f (x) dH(x)
I=
[a,b]
where H denotes a d-dimensional distribution with support K = [a, b] ∈
Rd and f is a function with singularities on the left boundary of K. Kainhofer’s aim is to use quasi-Monte Carlo on this type of problems and he
therefore derives a Koksma-Hlawka bound suitable for his approach. To
follow his derivation we begin with assuming that f is any function with
bounded variation. Let H(J) denote the probability of J ⊆ K under H.
A sequence ω = {y1 , y2 , . . .} is said to be H-distributed if for all intervals
K̃ ⊆ K
n
1
χ(yi ; K̃) = H(K̃).
lim
n→∞ n
i=1
Hence, for bounded functions we may approximate the integration with a
sum over a H-distributed sequence {yi }, i.e.
1
f (x) dH(x) ≈
f (yi ).
n
K
n
i=1
To establish a Koksma-Hlawka bound for more general domains and distributions we need a new definition of discrepancy:
Definition 2.6. The H-discrepancy of the sequence ω = {y1 , y2 , . . .} measures the distribution properties of the sequence in regard to the distribution H. Taking the first n points of the sequence the H-discrepancy is
defined as:
n
1 χ(yi , J) − H(J) .
Dn,H (ω, K) = sup n
J⊆K
i=1
This is a straightforward extension of the discrepancy concept which
gives a measure on the deviation of the sequence ω from the distribution
H. Together with the Hardy-Krause variation defined above we now have
the general Koksma-Hlawka inequality:
21
c by Martin Groth. All rights reserved.
Chapter 2. Theory
Definition 2.7. Let f be a function of bounded variation V (f ) in the
sense of Hardy-Krause on K and let ω = {y1 , y2 , . . .} be a sequence on K.
The quasi-Monte Carlo integration error can be bounded by
n
1
f (yi ) ≤ V (f )DH,n (ω, K).
f (x) dH(x) −
K
n
i=1
Kainhofer refer to the thesis by Tuffin [88] for a proof of this theorem with
a slight specialisation to variation in measure sense.
For functions with infinite variations, V (f ) = ∞, the Koksma-Hlawka
error bound will not provide us with a useful bound of the integration
error. This is not an uncommon situation in finance since we in many
instances have problems cast in an unbounded domain. We need not look
further than at the most simple and used example, a European call option,
to find such a case. This is a problem with an unbounded domain where
the underlying asset can assume values in [0, ∞] and where the option will
have an infinite value at the right boundary. Since the payoff function has
unbounded variation the error bound will not be useful. Clearly there are
many other options which also have singularity at one of the boundaries.
In the earliest work on quasi-Monte Carlo in finance this problem was not
considered or dismissed in vague terms. The use of quasi-Monte Carlo was
motivated on grounds of the Koksma-Hlawka error bound but no proofs
are given that the error bound is actually finite. Still, the numerical
results support the claim that the method is useful for the considered
problems. For problems with functions having a singularity at one of the
boundaries, Kainhofer [52] derives a convergence result for a d-dimensional
quasi-Monte Carlo estimator. This is applied to an Asian option pricing
problem using quasi-Monte Carlo. The convergence results are based on
the following theorem:
Theorem 2.4. Let f (x) be a function on [a, b] with singularity only at the
left boundary of the definition interval (i.e. f (x) → ±∞ only if xj → aj for
at least one j) and ω = (y1 , y2 , . . .) be a sequence on [a, b]. Furthermore
let cn,j = min1≤i≤n yi,j and aj < cj < cn,j . If the improper integral
f (x) dH(x)
[a,b]
22
c by Martin Groth. All rights reserved.
2.2. Quasi-Monte Carlo methods in Finance
exists in the way defined in Section 7.2 in Kainhofer [52] and if
Dn,H (ω)V[c,b] (f ) = o(1)
then the quasi-Monte Carlo estimator converges to the value of the improper integral:
1
f (yi ) =
n→∞ n
n
f (x) dH(x).
lim
i=1
[a,b]
As mentioned earlier, the Koksma-Hlawka bound often over-estimates
the convergence rate grossly. In many applications in finance with high
dimensionality the quasi-Monte Carlo method is found to be competitive
with Monte Carlo methods despite the dimensional dependence of the
convergence rate. Recently Papageorgiou [72] proved that for weighted
high-dimensional integration problems the worst case convergence rate is
−1/2
O(n−1+p{log(n)}
) = O(n−1+O(1) )
where p ≥ 0 is a constant. The weights in the integrations are assumed
to be Gaussian and with some restriction for the class of functions for the
integral. This is faster than the convergence rate for Monte Carlo and
independent of the dimension. Papageorgiou applies the result to some
problems in finance which shows that this may be the reason why quasiMonte Carlo performs better than can expected from the Koksma-Hlawka
error bound.
2.2.2
The Hlawka-Mück method
In the last chapter of his thesis, Kainhofer wants to use quasi-Monte Carlo
methods to price options in markets where the log-returns are not normally distributed. To sample low-discrepancy sequences he use a method
proposed by Hlawka and Mück [44]. The method enables generation of
low-discrepancy sequences from arbitrary distributions, provided we know
the distribution function. This opens up for generating low-discrepancy sequences from distributions where the inverse of the cumulative distribution
function is not explicitly known and the inversion method is inapplicable.
23
c by Martin Groth. All rights reserved.
Chapter 2. Theory
Hlawka and Mück gave a systematic way to generate the sequence in
the following way: Let ω = (x1 , x2 , . . . , xn ) be a uniformly distributed lowdiscrepancy sequence on [0, 1] with discrepancy given as Dn (ω). Define
ω̃ = (y1 , y2 , . . . , yn ) as the sequence
1
χ
(H(xr )),
yk =
n r=1 [0,xk ]
n
where H(·) is the distribution function of the desired distribution. That
is, every element in ω̃ is a fraction i/n, i ∈ {0, . . . , n}. They also proved
that if M = supx∈[0,1] h(x), where h(·) is the density for the distribution,
then the H-discrepancy Dn,H of ω̃ is bounded as
Dn,H (ω̃) ≤ (1 + M )Dn (ω).
The Hlawka-Mück method is useful for sampling from distributions
where the inverse transform is not available, but it has some deficiencies
which makes it discouraging for practical usage. The most profound is
that the number of points in the sequence has to be predetermined. For
practical purposes this might be unsuitable, for example if we want to
reach a certain level of accuracy. Since the method iterates through all
points in the uniform sequence ω to generate one point in ω̃ it involves n2
operations. Hence, the method is not competitive in speed compared to
many other methods when using the same number of points.
Kainhofer studies this algorithm in the context of unbounded integration problems. If the integrand has a singularity at one of the boundaries
of the integration interval the singularity is avoided by moving any sampled point at the boundary in to the closest point in the interval. This
effects the discrepancy in the one-dimensional case by adding a factor of
1/n, which does not change the asymptotic behaviour of the error. Then
the discrepancy of a d-dimensional sequence is
Dn,H (ω̃) ≤ (1 + 4M )d Dn (ω).
We have now gone through the theory behind the Koksma-Hlawka error bound with the extension from Kainhofer [52]. This put us in the
position to use quasi-Monte Carlo methods to price options with a singularity at one of the borders. We have also seen that the Hlawka-Mück
24
c by Martin Groth. All rights reserved.
2.3. Lévy processes and stochastic volatility modelling
method provides a way to generate low-discrepancy sequences from the
normal inverse Gaussian distribution and we will use this for comparison
with a method we propose below.
2.3
Lévy processes and stochastic volatility modelling
The fundamental model for the value of a financial asset is the geometric
Brownian motion. The pioneer in the field was Louis Bachelier who used
an early model for Brownian motion in his thesis 1900. The Geometric
Brownian motion as a model for the development of the underlying asset
was introduced by Paul Samuelson in the 1960s. Adding a risk-free money
account Black and Scholes [19] proposed the market model which is now
named after them:
dS(t)
S(t)
dB(t)
B(t)
= µ dt + σ dW (t),
(2.7)
= r dt.
(2.8)
Since S(t) is a geometric Brownian motion it has the solution
1
S(t) = S(0) exp([µ − σ 2 ]t + σW (t))
2
(2.9)
with initial condition S(0). We see from (2.9) that the returns of S(t)
are log-normal distributed. Already at the time when Black, Scholes and
Merton laid the foundation for asset pricing theory it was known that,
if considering short time intervals, log-returns of stocks experience jumps
and have features such as heavy tails, volatility clusters and skewness. All
these are features which violate the assumption of normally distributed
log-returns, which is the consequence of the Black-Scholes theory. The
clearly over-simplifying assumptions that there are no transaction costs,
taxes or governmental restrictions on stock holdings make for a very nice
but somehow unrealistic theory. However, despite this, the theory is still
not a museum specimen in the development of financial modelling.
25
c by Martin Groth. All rights reserved.
Chapter 2. Theory
Merton [62] tried to incorporate jumps with unpriced risk by adding
a jump term to the stochastic differential equation (2.7)
dS(t)
= µ dt + σ dW (t) + dJ(t),
S(t−)
where J(t) is a process with piecewise constant sample paths independent
of W (t). After Merton many different models have been proposed to capture some of the properties not present in the Black-Scholes theory. So far,
the financial community has not been able to reach a consensus in how to
handle this. Before Black and Scholes suggested their model Mandelbrot
noticed that financial prices had long tails and an infinite span of dependencies. He proposed that prices could be modeled by changing from a
Gaussian distribution to ”L-stable” probability laws and multi-fractals,
but his model never gained any momentum in the financial community.
Much more information about this model can be found in Mandelbrot
[60].
Mandelbrot is not alone to suggest that the log-returns could be modelled by a different distribution. Since the Black-Scholes theory has the
property that log-returns are normally distributed the increments are independent. One could then ask if there are other models which also have
independent log-increments and which capture more features of observed
stock prices. If one assume that the asset price could be represented as
S(t) = S(0)eX(t) ,
where X(t) is any Lévy process, then the asset price has independent logincrements. A Lévy process is a process having stationary independent
increments, see Bertoin [16]. Given a specific Lévy process, the log-returns
will have the distribution corresponding to the law of the Lévy process.
One Lévy process that has been suggested as a fruitful assumption for
modelling the log-returns is the hyperbolic Lévy process. Hyperbolic distributions were introduced by Barndorff-Nielsen [9] and studied in the
context of wind born sand. Eberlein [29] followed up a suggestion from
Barndorff-Nielsen that log-returns could be modeled with a hyperbolic
Lévy process, which gave good fit with data from the German financial
market.
26
c by Martin Groth. All rights reserved.
2.3. Lévy processes and stochastic volatility modelling
A special case of the hyperbolic distributions is the normal inverse
Gaussian (NIG) distribution, see Barndorff-Nielsen [10], which has been
extensively studied as a possible model for financial data. It is a fourparameter distribution defined on R having density function
√ 2 2
αeδ α −β +β(x−µ)
K1 δα 1 + ((x − µ)/δ)2 ,
N IG(x; α, β, µ, δ) = π 1 + ((x − µ)/δ)2
where K1 is the modified Bessel function of the third kind and index 1.
The parameters satisfy µ ∈ R, δ ∈ R+ , 0 ≤ |β| < α and can be interpreted
as steepness (α), asymmetry (β), scale (δ) and location (µ). The normal
inverse Gaussian Lévy process has in several studies shown to give a good
fit to log-returns of short term stock prices, see Rydberg [81]. However,
both the hyperbolic and the normal inverse Gaussian model suffer from
the same deficiency, as do all discontinuous Lévy processes with stochastic
jumps: with jumps or stochastic volatility we introduce risks that may
render the market incomplete. In incomplete markets there may exist a
whole continuum of equivalent martingale measures and a unique price is
not present since the price could be different under different measures.
Instead of looking at specific distributions of log-returns one could try
to alter the dynamics. For example the assumption in the Black-Scholes
theory that the dynamics of the stock price follow a stochastic differential
equation with constant parameters. In doing so researchers have hoped
to capture features seen in data which indicate that volatility is indeed
stochastic too. Models involving stochastic volatility have been studied by,
among others, Heston [43] and Hull and White [45, 46]. One other type
of model in this context is the non-Gaussian Ornstein-Uhlenbeck-based
model proposed by Barndorff-Nielsen and Shepard [12], abbreviated as
the BNS-model:
dSt = α(Yt )St dt + σ(Yt )St dBt ,
dYt = −λYt dt + dLλt ,
S0 = s > 0
Y0 = y > 0.
This is a model where we have a Brownian motion Bt as the driving source
but instead of constant parameters we have a stochastic volatility σ(Yt ).
The volatility process Y (t) is a mean-reverting process with reverting parameter λ and a jump process Lt . Lt is assumed to be a subordinator,
27
c by Martin Groth. All rights reserved.
Chapter 2. Theory
i.e. an increasing Lévy process, see Bertoin [16]. Barndorff-Nielsen and
Shepard specify the parameter functions as
α(y) = µ + βy,
σ(y) =
√
y.
If Yt has an inverse Gaussian law then the log-returns will be approximately normal inverse Gaussian distributed.
2.3.1
Indifference pricing in a stochastic volatility model
with jumps
In Benth and Meyer-Brandis [15] the authors investigate the stochastic
volatility model introduced by Barndorff-Nielsen and Shepard [12]:
dSt = α(Yt )St dt + σ(Yt )St dBt ,
dYt = −λYt dt + dLλt ,
S0 = s > 0,
Y0 = y > 0.
(2.10)
(2.11)
They consider an investor trying to maximise her exponential utility by
either entering into the market on her own or issuing a financial derivative
and investing her incremental wealth after collecting the premium. The
indifference price of the claim is then the premium at which the investor
becomes indifferent between the two alternatives. Using a dynamic programming approach the utility maximisation problem is solved resulting
in Hamilton-Jacobi-Bellman (HJB) equations with an integral term.
Consider a European option with Markovian claim f (ST ), where f is
bounded. Without loss of generality, let the rate of return of the risk-free
asset be zero and its value equal to 1 at t = 0. Assume the investor has
the exponential utility function
U (x) = 1 − exp(−γx),
γ>0
where γ is the risk aversion parameter. The investor will have a wealth
dynamics, with initial wealth x, given as
dXu = πu α(Yu ) du + πu σ(Yu ) dBu , Xt = x,
where πu = π(t, x, y) is the money invested in the risky asset Su at time
u. We let At be the set of all admissible controls π starting at time t.
28
c by Martin Groth. All rights reserved.
2.3. Lévy processes and stochastic volatility modelling
In the case the investor enters into the market the value function for the
optimal control problem is
V 0 (t, x, y) = sup E[1 − exp(−γXT )|Xt = x, Yt = y].
π∈At
On the other hand, if the investor issues a claim the value function will
be
V (t, x, s, y) = sup E[1 − exp(−γ(XT − f (ST )))|Xt = x, Yt = y, St = s].
π∈At
The utility indifference price of the claim f (ST ) for a given risk aversion
level γ is the unique solution Λ(γ) (t, y, s) of the equation
V 0 (t, x, y) = V (t, x + Λ(γ) (t, y, s), s, y).
The minimal entropy price occurs as the risk aversion level approaches
zero.
Benth and Meyer-Brandis derive the HJB-equation for the value function in the case no claim has been issued and proves, after doing the
simplifying ansatz
V 0 (t, x, y) = 1 − exp(−γx)H(t, y),
that solving the HJB-equation is equivalent to solving the following linear
integro-PDE:
Ht (t, y) −
α2 (y)
H(t, y) − λyHy (t, y)
2σ 2 (y)
∞
{H(t, y + z) − H(t, y)} ν(dz) = 0 (2.12)
+λ
0
with terminal condition H(T, y) = 1, y ∈ R+ . Specifying the parameter
functions of the model (2.10)-(2.11) as
√
(2.13)
α(y) = µ + βy, σ(y) = y,
then (2.12) allows a Feynman-Kac representation:
1 T α2 (Yu )
du Yt = y ,
H(t, y) = E exp −
2 t σ 2 (Yu )
(t, y) ∈ [0, T ] × R+
(2.14)
29
c by Martin Groth. All rights reserved.
Chapter 2. Theory
with solution H(t, y) ∈ C 1,1 ([0, T ] × R+ ). Assuming α(y) = βy there is
an explicit solution to (2.12), with the above terminal condition, given as
H(t, y) = exp(b(t)y + c(t)).
(2.15)
Here b(t) and c(t) are defined as
b(t) = −
β2
(1 − exp(−λ(T − t))),
2λ
T
φ(b(u)) du
c(t) = λ
t
where φ(x) is the log-moment generating function of L1 . In the case the
investor issues a claim, we make the ansatz that the value function can be
described as
V (t, x, y) = 1 − exp(−γx + γΛ(γ) (t, y, s))H(t, y)
where Λ(γ) is the indifference price with risk aversion level γ.
Deriving the HJB-equation and approaching the zero risk aversion
limit, i.e. letting γ → 0, Benth and Meyer-Brandis end up in the following
linear integro-PDE for the entropy price of the claim f (ST ):
1
Λt + σ 2 (y)s2 Λss − λyΛy
2
∞
+λ
0
(Λ(t, y + z, s) − Λ(t, y, s))
H(t, y + z)
ν(dz) = 0 (2.16)
H(t, y)
with (t, y, s) ∈ [0, T ) × R+ × R+ . We also have the terminal condition
Λ(T, y, s) = f (s), which yields a Feynman-Kac representation for the solution. The Lévy measure is so far left unspecified but we know that if the
volatility has an inverse Gaussian law then the log-returns of the model
will be approximately normal inverse Gaussian distributed. This is of special interest since there are firm confirmations that this distribution fits
well to short term log-returns.
2.4
Simulation in markets driven by Lévy processes
Numerical methods to price options include a wide range of techniques.
The common backdrop in asset pricing theory, the Black-Scholes market,
30
c by Martin Groth. All rights reserved.
2.4. Simulation in markets driven by Lévy processes
allows many different ways to price options; Monte Carlo methods, numerical solutions to the Black-Scholes partial differential equation and of
course explicit solutions such as the well known Black-Scholes formula.
Explicit solutions are to prefer if possible but these can only be found in
rare special cases. For more complicated derivatives and markets we have
to rely on numerical methods. The PDE-approach to option pricing in
the Black-Scholes market is covered in the extensive book by Wilmott,
Dewynne and Howison [89] and above it was shown how to derive an
integro-PDE for option pricing in a BNS-market. We have already covered Monte Carlo methods in depth, very flexible and easily adjustable
methods to use for simulation. To adapt Monte Carlo to markets driven
by general Lévy processes we need to be able to sample the distribution
of the increments of the process. Simulations of Lévy processes have been
studied by among others Asmussen and Roskinski [3] and Rasmus [80].
They use the Lévy-Itô decomposition to split the process in three parts:
linear drift, Brownian motion and jumps. The jumps are then divided
in two parts whereafter the large jumps constitute a compound Poisson
process and the small jumps are approximated by a Brownian motion.
Below we give two other methods we can use for pricing options in
Lévy driven markets. To begin with we discuss a way to draw random
numbers from the normal inverse Gaussian distribution and then continue
with how to use the fast Fourier transform for pricing European options.
2.4.1
Pseudo-random number generation for the normal
inverse Gaussian distribution
To use Monte Carlo we need to have a way to draw random numbers from
the distribution at hand. The inverse distribution function for the normal inverse Gaussian distribution is not explicitly known and therefore
it is not possible to use the inverse method to generate random numbers. As we saw earlier, we could use the Hlawka-Mück method to obtain
quasi-random numbers but for pseudo-random number generation there
are other methods developed. Rydberg [81] gives a way to simulate normal inverse Gaussian random numbers based on work by Atkinson [4] and
Michael, Schucany and Haas [63]. This pseudo-random number generation
depends on the fact that the normal inverse Gaussian distribution belongs
31
c by Martin Groth. All rights reserved.
Chapter 2. Theory
to the class of generalised hyperbolic (GH) distributions. These distributions can be characterised as a normal variance-mean mixture with the
mixing function being a generalised inverse Gaussian distribution (GIG),
see Barndorff [9]. That is, we may describe a generalised hyperbolic distribution with parameters λ, α, β, µ, δ as
GH(λ, α, β, µ, δ) = N(µ + zβ, z) GIG(λ, δ2 , α2 − β 2 ),
z
where N (µ + zβ, z) is the normal distribution with mean µ + zβ and variance z and the parameters are restricted by µ ∈ R, δ > 0, 0 ≤ |β| ≤ α.
Now, the normal inverse Gaussian is the special case NIG(α, β, µ, δ) =
GH(−1/2, α, β, µ, δ) which is a normal variance-mean mixture with mixing distribution being the inverse Gaussian, IG(δ2 , α2 − β 2 ). From this
mixing property it follows that to simulate a random number it is sufficient to simulate two random numbers, one normally distributed and
one inverse Gaussian distributed. Normally distributed random numbers
are well known and easily obtained from uniform random variables by the
Box-Müller transformation or by an approximated inverse transformation,
such as the Moro transformation [64].
In the class of generalised inverse Gaussian distributions the case when
λ = −1/2, the inverse Gaussian distribution, has the special property
that a realisation can be written as the solution to a quadratic equation
depending on a χ2 -distributed value. That is, the IG(δ, γ)-density is given
as
1 2 −1
δ
−3/2
2
exp − (δ x + γ x) ,
f (x; δ, γ) = √ exp(δγ)x
2
2π
but if we make the parameter change λ = δ2 , ψ = δ/γ we can express the
density as
λ(x − ψ)2
λ
,
exp −
f (x; λ, ψ) =
2πx3
2ψ 2 x
with x > 0, ψ > 0, λ > 0. The cumulative distribution function corresponding to this density is not easily inverted but we may note that
V =
λ(X − ψ)2
∼ χ2(1)
ψ2 X
32
c by Martin Groth. All rights reserved.
(2.17)
2.4. Simulation in markets driven by Lévy processes
where χ2(1) is the chi-squared distribution with one degree of freedom.
Variates from the χ2(1) -distribution are easily obtained from normally distributed which, as mentioned above, are easily transformed from uniform
random numbers. Hence, if v is a realisation of (2.17) we can generate an
inverse Gaussian random number by solving a quadratic equation and get
two solutions:
z1 = µ +
ψ
ψ2 v
−
4ψλv + ψ 2 v 2
2λ
2λ
ψ2
.
z1
z2 =
Both solutions are necessary to cover the whole distribution but we must
make a choice which one to use. We do this by a probabilistic choice
involving another uniform random number, choosing z1 with probability
ψ
z1
ψ+z1 and z2 with probability ψ+z1 . The whole algorithm for generating a
normal inverse Gaussian random number can now be formulated as:
Algorithm 2.1.
1. Sample u1 ∼ U[0, 1]
2. Let Y = Φ−1 (u1 ) ∼ N(0, 1)
3. Sample u2 ∼ U[0, 1]
4. Let V = (Φ−1 (u2 ))2 ∼ χ2(1)
5. Set λ = δ2 , ψ = δ/(α2 − β 2 )
6. Compute z1 = ψ +
ψ2 V
2λ
−
ψ
2λ
4ψλV + ψ 2 V 2
7. Sample u3 ∼ U[0, 1]
8. If u3 ≤
ψ
ψ+z
let Z = z1 otherwise, let Z =
9. Return X = µ + βZ +
√
ψ2
z1
ZY ∼ NIG(α, β, µ, δ)
33
c by Martin Groth. All rights reserved.
Chapter 2. Theory
In the algorithm Φ−1 (x) denotes the inverse of the cumulative distribution function for the normal distribution. As can be seen from the algorithm we need to sample three uniformly distributed random variables
to get one normal inverse Gaussian distributed random number. This
algorithm was developed by Michael et al. [63] and later simulation algorithms for both generalised inverse Gaussian and hyperbolic distributions
were studied by Atkinson [4].
2.4.2
Using the fast Fourier transform for option pricing
The fast Fourier transform (FFT) is a computationally very fast and reliable method. FFT is an algorithm to calculate the discrete Fourier
transform of a function gn = g(n∆u) for a range of parameter values
xk = k∆x, k = 0, . . . , N − 1 simultaneously. Here ∆x = 2π/N ∆u and for
the FFT to be most efficient N has to be an integer power of 2. The FFT
takes N complex numbers as input and returns N complex numbers
Gk =
N
−1
e−2πi N gn ,
nk
k = −N/2, . . . , N/2.
n=0
The demand for fast numerical methods to determine option prices
made it only a question of when someone developed a method exploiting
the advantages of the fast Fourier transform. In the nineties research surfaced where Fourier analysis and Laplace analysis was used for transformbased methods to price options in extensions to the Black-Scholes model,
see Bakshi and Chen [5], Bates [13], Chen and Scott [24], Heston [43]
and Scott [83]. The models included stochastic volatility elements and
jumps to give better correspondence to observed asset prices as well as
interest rate options. However, the approaches of these authors could not
utilise the computational power of the fast Fourier transform. Carr and
Madan [23] proposed a method able to price options when the characteristic function of the return is known analytically. They applied the method
to the variance gamma model, which assumes that the log-price obeys a
one-dimensional pure jump Markov process with stationary independent
increments.
The motivation for Carr and Madan’s use of the fast Fourier method
was the following: Assume we are interested in the price of a European
34
c by Martin Groth. All rights reserved.
2.4. Simulation in markets driven by Lévy processes
option with maturity T . The payoff depends on the terminal spot price ST
of the underlying asset. We know analytically the characteristic function
of the logarithm of the spot price sT , defined as
φT (u) = E[exp(iusT )].
Denote the logarithm of the strike price by k, and let CT (k) be the value
of a call option with strike exp k. If qT (s) is the risk-neutral density of the
log-price then the characteristic function of qT is
φT (u) =
∞
−∞
eius qT (s) ds.
The value of the call can then be described as an integral over this density,
i.e.
∞
e−rT (es − ek )qT (s) ds.
CT (k) = E[f (sT , k)] =
k
To kill out the option price as k → −∞, and get a square integrable
function, Carr and Madan consider the modified call price cT (k)
cT (k) = exp(αk)CT (k),
α > 0.
Now, the Fourier transform of cT (k) is defined as
ψT (v) =
∞
−∞
eivk cT (k) dk,
and Carr and Madan’s idea is to get an analytical value of ψT in terms
of φT and then use the inverse Fourier transform to obtain option prices.
The option price is then given as
CT (k) =
exp(−αk)
π
0
∞
eivk ψT (v) dv
(2.18)
35
c by Martin Groth. All rights reserved.
Chapter 2. Theory
since CT (k) is real. The analytic expression for ψT (v) is determined as
∞
∞
eαk e−rT (es − ek )qT (s) ds dk
k
s
−∞
∞
−rT
e
qT (s)
(es+αk − e(1+α)k )eivk dk ds
=
−∞
−∞
∞
e(α+1+iv)s
e(α+1+iv)s
−rT
−
ds
e
qT (s)
=
α + iv
α + 1 + iv
−∞
ψT (v) =
=
eivk
e−rT φT (v − (α + 1)i)
.
α2 + α − v 2 + i(2α + 1)v
Carr and Madan give suggestions for appropriate choice of the parameter
α, the damping parameter. We see that we can approximate (2.18) by
taking the trapezoid rule with vj = η(j − 1) and then employ a regular
spacing ku = −b + λ(u − 1), u = 1, . . . , N with size λ. This gives strike
values ranging from −b to b, where b = 1/2N λ. Carr and Madan also note
that to use the fast Fourier transform the relation between η and λ must
be 2π = ληN . Finally, to integrate accurately with a fine grid and still not
observe options prices with a large spacing Carr and Madan incorporate
Simpson’s rule weightings. The option prices can then be represented as
exp(−αku ) −i 2π (j−1)(u−1) ibvj
η
e N
e ψ(vj ) [3 + (−1)j − δj−1 ]
π
3
N
C(ku ) =
j=1
(2.19)
where δn is the Kronecker delta function which is one for n = 0 and zero
otherwise.
After approximating (2.18) with the summation (2.19) we can apply
the fast Fourier transformation to price the option for a range of strike
values. Carr and Madan use this approach for the variance gamma model.
The method was generalised to include other options by Raible [79] who
uses Fourier and bilateral Laplace transforms and Lewis [59] who uses
generalised Fourier transforms consistently.
36
c by Martin Groth. All rights reserved.
2.5. Malliavin calculus and option price sensitivities
2.5
Malliavin calculus and option price sensitivities
For a trader in options not only the price of an option is of interest, but
also the sensitivities of the option price with respect to small changes in
the parameters of the underlying asset model. The price sensitivities are
often referred to as the Greeks. Calculating the Greeks can be done in
a few different ways; Glasserman [37] reviews some Monte Carlo methods and some other can also be found in Kohatsu-Higa and Montero [53].
For Monte Carlo the most natural is to try to approximate the involved
derivative by a finite difference. This forces us to take a numerical derivative of the payoff function which may not be smooth. In an inspiring
paper by Fournié et al. [35] the authors showed that, under reasonable
assumptions, all Greeks can be calculated using the Malliavin integrationby-parts formula without having to differentiate the option price. Their
paper was soon followed by a number of papers using the same approach
on different problems, see Fournié et al. [34], Kohatsu-Higa and Montero
[53] and Larsson [55]. The work by Fournié et al. was set in the BlackScholes framework but the research in the area of Malliavin calculus for
other processes than Brownian motion is a vital branch. Malliavin calculus for jump processes and Lévy processes have been studied for a long
time with different approaches being suggested; for more knowledge we
refer to research by Bichteler et al. [17], Di Nunno et al. [27], Nualart and
Schoutens [70] and Nualart and Vives [71]. Considering a market driven
by Poisson processes El-Khatib and Privault [31] proved a method similar
to Fournié et al. [35]. Unfortunately, the need to have a Malliavin chainrule limits their choice of Malliavin differential operator to one with a
domain excluding European claims. However, the domain includes Asian
options and for such options it is possible to simulate the Greeks. Lately
the thesis by Johansson [50] includes work on stochastic weights for calculating the Greeks in a jump-diffusion setting when the jump amplitude
is deterministic.
The idea from Fournié et al. is to use the Malliavin integration-byparts formula to get rid of the derivative and instead introduce Malliavin
weights. The Greeks are derivatives with respect to the parameter θ we
37
c by Martin Groth. All rights reserved.
Chapter 2. Theory
are interested in,
∂
∂XT
∂
E[f (XT )] = E
f (XT ) = E f (XT )
.
∂θ
∂θ
∂θ
(2.20)
Using the duality
T
E[F δ(u)] = E
0
(Dt F )ut dt ,
where δ(u) is the Skorokhod integral of u, which coincide with the Itôintegral if u is adapted, and the Malliavin chain-rule for a random variable
X
(2.21)
Ds f (X) = f (X)Ds X,
we have, assuming f (XT ) ∈ D1,2 and u ∈ Dom(δ), that
∂
E[f (XT )] = E[f (XT )δ(u)].
∂θ
(2.22)
The random variable u is given as
u = T
0
∂XT
∂θ
hT
hv Dv XT dv
.
(2.23)
The function δ(u) in (2.22) is in these circumstances sometimes referred
to as the Malliavin weight since we after applying the integration-by-parts
formula end up with the ”weighted” expectation of f (XT )δ(u).
The application of Malliavin integration-by-parts has proved to reduce
the variance in Monte Carlo simulations of the sensitivities, especially
for sensitivities of higher derivative order. The reason for this is that
the payoff functions do not have continuous derivatives. Considering a
European call option with payoff function f (x) = (x − K)+ we see that
d
d2 f (x)
1
=
= δK (x),
2
dx
dx {x>K}
hence, we have a Dirac delta function in the simulations. Few paths of the
simulations will ”hit” and this leads to high variance and slow convergence.
38
c by Martin Groth. All rights reserved.
2.5. Malliavin calculus and option price sensitivities
It is known that this can be reduced by instead considering a weighted
payoff function, or some other variance reduction technique. Below we
will study the use of Malliavin calculus integration-by-parts in a jumpdiffusion setting. For all necessary background about Malliavin calculus
in the pure Gaussian environment we refer to Nualart [69].
39
c by Martin Groth. All rights reserved.
Chapter 3
Simulation in Financial
mathematics
Black and Scholes’s work in the early seventies is nowadays common
knowledge in the financial community. The theory is still the basis of
option pricing, but it is always a competition among traders to use new
methods to get ahead. The following sections concern extensions to the
Black-Scholes theory and investigate markets driven by Lévy processes
and stochastic volatility models. We study numerical methods in these
incomplete markets, with applications in finance such as option pricing
and Value-at-Risk. The spectrum of methods is quite broad, and spans
over solutions to partial differential equations, the fast Fourier method
and quasi-Monte Carlo methods. Most of the methods are implemented
from scratch, either in Matlab or in C++ . However, some of the random
and quasi-random number generators are implemented by others. The
low-discrepancy sequences used throughout this thesis are implemented
by John Burkardt1 . Procedures and suggestions for implementing a few
of the low-discrepancy sequences used can be found in Glasserman [37].
If not specifically mentioned, except the zero element we do not skip any
numbers in the beginning of the sequence to improve the randomness, as
suggested by Fox [36] and mentioned in Glasserman [37].
We mainly consider two types of options in our numerical solutions,
European call/put options and average rate options, usually with payoff
function of call-type. The latter is referred to as Asian options, but the
use of average rate options is not crucial in any way. We could just as well
have considered average strike options or other types of path dependent
1
School of Computational Science at Florida State University,
http://www.csit.fsu.edu/∼burkardt
40
c by Martin Groth. All rights reserved.
derivatives but for convenience we have chosen to stick to the average rate
options.
The simulations are conducted on designated simulation servers. We
use Matlab 7 if the simulation is done in Matlab, with no particular optimisation of the code to speed up the simulations. For C++ implementations
we use the standard g++ compiler, also here without further optimisation. The exceptions are the simulations of the time to execute certain
procedures, which are done on a 1 MHz Macintosh Powerbook to ensure
full control over the CPU usage.
41
c by Martin Groth. All rights reserved.
Chapter 3. Simulation in Financial mathematics
3.1
Low-discrepancy sequences for the normal
inverse Gaussian distribution
Low-discrepancy sequences have proved to be superior over random sampled sequences for many problems involving numerical integration and there
are many important problems in finance where they are applicable. Today new financial models develop which involve other distributions than
the normal/log-normal distribution. One distribution which has attracted
a lot of attention recently is the normal inverse Gaussian distribution,
introduced in Section 2.3. We develop a new method to generate lowdiscrepancy sequences from this distribution, based on the sampling algorithm suggested by Rydberg [81]. We apply the method to option pricing
problems and compare it to the Hlawka-Mück method [44]. This is joint
work together with Fred Espen Benth.
3.1.1
The sampling algorithm
The sampling algorithm given by Rydberg [81], which we review in Section
2.3, allows us to generate a normal inverse Gaussian random number from
three uniformly distributed random numbers. It applies inverse transformations to obtain normally distributed numbers and the algorithm
developed by Michael et al. [63] to generate inverse Gaussian numbers.
Finally it takes advantage of the mean-variance mixing property of the
normal inverse Gaussian distribution. The idea here is to use much the
same algorithm but instead of sampling three random numbers we sample
from a three-dimensional low-discrepancy sequence defined on the unit
hypercube. The sequence of normal inverse Gaussian numbers is believed
to have low-discrepancy, following from the low-discrepancy property of
the original uniformly distributed sequence. However, that remains to
be proved. Still, we can not expect any better discrepancy for our onedimensional sequence than for the three-dimensional sequence, which is
of order O(log(n)3 /n). Due to this it is also expected that the quality
of the sequence deteriorates in higher dimensions since the method operates with quasi-random sequences in a dimension three times as high. To
investigate the performance of the algorithm we perform numerical tests
where we compare it with other low-discrepancy methods and Monte Carlo
42
c by Martin Groth. All rights reserved.
3.1. Low-discrepancy sequences for the normal inverse Gaussian distribution
methods.
There are a few issues that we must address in the conversion from
pseudo-random to quasi-random numbers. The first precaution we have
to take is to observe that the Box-Müller transformation to obtain normally distributed numbers from uniformly distributed is not suitable for
low-discrepancy sequences. This is because the Box-Müller transformation does not maintain the order of the sequence and hence destroys the
low-discrepancy property. It is necessary to use some approximate inverse
transformation such as the fast inversion method by Moro [64]. We denote
the approximate inversion of the cumulative normal distribution function
as Φ−1 (x). The second aspect which could be influencing the performance
of the algorithm is in which order we use the uniformly distributed numbers. It is not evident which two dimensions that should be transformed
to normally and chi-squared distributed random numbers. In theory there
should not be any difference between the cases but we will investigate this
in a small test.
The algorithm is, apart from the sampling of the uniform numbers,
identical with Algorithm 2.1 and given as:
Algorithm 3.1.
1. Sample {u1 , u2 , u3 } ∈ [0, 1]3 from a suitable low-discrepancy sequence.
2. Let Y = Φ−1 (u1 ) ∼ N(0, 1)
3. Let V = (Φ−1 (u2 ))2 ∼ χ2(1)
4. Set λ = δ2 , ψ = δ/(α2 − β 2 )
5. Compute z1 = ψ +
−
ψ
2λ
4ψλV + ψ 2 V 2
2
let Z = z1 otherwise, let Z = ψz1
√
7. Return X = µ + βZ + ZY ∼ NIG(α, β, δ, µ)
6. If u3 ≤
ψ
ψ+z
ψ2 V
2λ
The algorithm above generates a one-dimensional quasi-random number for the normal inverse Gaussian distribution. It extends straightforward to higher dimensions but care has to be taken when the dimensions
43
c by Martin Groth. All rights reserved.
Chapter 3. Simulation in Financial mathematics
increase. The properties of low-discrepancy sequences yield that they perform worse in high dimensions because the sequences fill the unit interval
in a way which to a less extent mimics randomness. Since this method
requires a dimension of the uniform low-discrepancy sequence three times
the dimension of the normal inverse Gaussian random number we wish to
sample, it quickly ends up in high dimensions.
The convergence of quasi-Monte Carlo methods is generally deduced
from the Koksma-Hlawka bound in Theorem 2.3 and we would like to
use the same result for the convergence of our low-discrepancy sequence.
The error bound requires the variation of the function to be finite to have
any useful meaning, but in finance functions occur that do not satisfy
this requirement because they have a singularity at one of the boundaries.
As mentioned, the problem was studied by Kainhofer [52] who proves a
convergence result for improper integrals. The result allows Kainhofer to
disregard the singularity and with the sequences used in his thesis the
function has bounded variation. This since the function f is monotone in
all variates, continuous and positive and hence, the variation in the sense
of Vitali is merely the difference between the function values at the end
points.
We face the question whether we can prove that our transformed sequence has a certain discrepancy or if V (f ◦ Φ) has bounded variation.
It remains to prove either of these statements to be true. Regarding
the discrepancy of our sequence, we observe that intervals of the type
used in the definition of discrepancy are not maintained when transforming from the three-dimensional hypercube into the one-dimensional unit
interval. The transformation disrupts the ordering and breaks up in different one-dimensional intervals. It could be possible to consider isotropic
discrepancy but then the discrepancy would depend on the dimension.
Considering variation on the other hand, we see that the transformation
consists of adding and multiplying functions which by themselves have
finite variation. We can not adhere to the same reasoning as Kainhofer
since the function (f ◦ Φ) is not monotone in all three variates. The transformation also has singularities at the boundaries but from the work by
Kainhofer we know that this is not crucial. Still we would need to prove
that V[0,c] (f ◦ Φ) < ∞.
44
c by Martin Groth. All rights reserved.
3.1. Low-discrepancy sequences for the normal inverse Gaussian distribution
3.1.2
Numerical tests of the NIG-qMC numbers
The performance of the normal inverse Gaussian low-discrepancy sequence
is assessed in three tests. We test both for accuracy and speed, the
latter being a property which importance is not to be underestimated.
Our quasi-Monte Carlo method (qMC) is compared to three other methods, an Acceptance-Rejection method (A-R), the Michael-Schucany-Haas
Monte Carlo method with Algorithm 2.1 (MSH-MC) and the HlawkaMück method used by Kainhofer [52] (H-M). The last of these suffers, as
mentioned earlier, from the deficiency that it is necessary to generate a
predetermined number of random numbers. The consequence of this is
that we have to rule out tests which measure the time until we reach a
certain level of accuracy. The Hlawka-Mück method is also only defined
for the unit interval, so we have to apply a transformation back and forth
between the real line and the unit hypercube. Here Kainhofer uses the
one-dimensional double-exponential distribution with inverse distribution
function defined as
1
if x ≤ 12 ,
λ log(2x)
Hλ−1 (x) =
− λ1 log(2 − 2x) if x > 12 .
It should be noted that to avoid taking the logarithm of zero in the transformation we apply a shift suggested by Kainhofer. We shift the point
at zero 1/n away from zero before taking the logarithm, where n is the
number of points in the sequence we use. This has, as Kainhofer proves,
minor influence on the discrepancy of the Hlawka-Mück sequence.
The first test is to determine the price of a plain vanilla call option. For
the normal inverse Gaussian distribution we apply the same parameters
as used in Chapter 8 in Kainhofer [52]:
α = 136.29, β = −15.1977, δ = 0.0295, µ = 0.00395
and for the Hlawka-Mück method we let the transformation parameter
be λ = 95.2271. To generate the quasi-random numbers we use a onedimensional Halton sequence for the Hlawka-Mück method while for our
NIG-method we use a three-dimensional Niederreiter sequence with base
2. Since the Hlawka-Mück method operates in one dimension we are
45
c by Martin Groth. All rights reserved.
Chapter 3. Simulation in Financial mathematics
confident that the Halton sequence exhibits sufficiently good uniformity
compared to the Niederreiter sequence. There is no reason to believe that
the accuracy would suffer from this choice of sequence and generating
numbers from the Halton sequence is faster than from the Niederreiter sequence with the implementations we use. For the MSH and A-R methods
we use Matlab’s2 random number generators draw the uniformly and normally distributed random numbers, both considered sufficiently accurate
and certainly fast enough for this application.
For the call option we set both the current value S0 and the strike K
equal to 100$. We let the time to maturity be equal to T − t = 1 and
choose the interest rate r = 0.0375. We assume the option has normal
inverse Gaussian distributed log-returns and use a long simulation with
the MSH Monte Carlo method as the ”true value”. Figure 3.1 shows loglog plots of the relative errors for the methods discussed above, with the
numbers in Table 3.1. The error for the Hlawka-Mück method is generally
lower than for the other methods but the quasi-Monte Carlo method is
superior to the two Monte Carlo methods. The results for the two Monte
Carlo methods are the mean over ten consecutive runs and we observe that
the two methods perform equivalently for all sets of points. The quasiMonte Carlo method is slightly worse off than the Hlawka-Mück method
in accuracy, which is expected. In one dimension the Hlawka-Mück points
are filling the space in a more even way than the qMC points, which is
clear from Figure 3.2. Hence, we expect that the Hlawka-Mück method is
more accurate for a given point set, but are confident that the quasi-Monte
Carlo method performs better than ordinary Monte Carlo. However, the
latter may have significantly better convergence if we apply a variance
reduction technique.
In accuracy the Hlawka-Mück method seems to outperform the other
methods. However, the execution times differ significantly, see Table 3.2.
The generation of the Hlawka-Mück numbers involves calculating the cumulative distribution function using numerical integration and iterates
over all points repeatedly, which makes the method very slow compared
to the other ones. When we perform the Hlawka-Mück algorithm we do
the integration within the method while Kainhofer does this in advance
2
The MathWorks, Inc www.mathworks.com
46
c by Martin Groth. All rights reserved.
3.1. Low-discrepancy sequences for the normal inverse Gaussian distribution
Vanilla Call, Relative error
Hlawka-Muck
MSH-QMC
MSH-MC
A-R
-1
10
-2
10
-3
10
2
3
10
4
10
10
Figure 3.1: Log-Log plot of the relative error for the
vanilla call option price with different sizes of the sequence.
Points
32
64
128
256
512
1024
2048
4096
8192
16386
H-M
0.01011258
0.00617316
0.00797682
0.00146823
0.00227554
0.00107540
0.00111985
0.00087739
0.00075454
0.00070015
qMC
0.05077280
0.03862026
0.00631415
0.00727420
0.00703399
0.00414102
0.00266201
0.00252656
0.00103171
0.00139318
MSH-MC
0.11851085
0.12294521
0.10343995
0.04294779
0.04262519
0.02811982
0.02032262
0.01777099
0.01227639
0.00785865
A-R
0.15329472
0.13528923
0.09247369
0.05764136
0.04311718
0.03416768
0.02875563
0.01681956
0.01302171
0.00853969
Table 3.1: Table of the relative error for the vanilla call
option price with different sizes of the sequence.
47
c by Martin Groth. All rights reserved.
Chapter 3. Simulation in Financial mathematics
Figure 3.2: Display of how the Hlawka-Mück and the
quasi-Monte Carlo method place the NIG-numbers for 8,
16, 32 and 64 number of points. On the left Hlawka-Mück
and on the right qMC. As seen the Hlawka-Mück method
has a more symmetrically distributed set of points. Note
that due to the shift described above, some points will
overlap for the Hlawka-Mück method.
using Mathematica3 . If we did all the numerical integration in advance
and composed a common look-up table for all dimensions, we could probably speed up the computation. But as we saw above, the Hlawka-Mück
method is clearly slower than the other methods also in one dimension,
where it would not profit anything in speed from a look-up table. We also
note that it may seem like shooting flies with a cannon to use a quasiMonte Carlo method which involves numerical integration on a problem
where we could have applied numerical integration directly. Even though
the integration is in only one dimension, and thus avoids the curse of dimensionality in multi-dimensional integration, the execution time for the
Hlawka-Mück method compared to the other ones is a clear indication
that there is more work done than necessary.
The quasi-Monte Carlo method we propose has, as we saw above,
slightly lower accuracy than the Hlawka-Mück method, but when consid3
Mentioned in personal correspondence
48
c by Martin Groth. All rights reserved.
3.1. Low-discrepancy sequences for the normal inverse Gaussian distribution
Points
32
64
128
256
512
1024
2048
4096
8192
16386
H-M
0.1400
0.1600
0.3200
0.6900
1.6200
4.3500
16.6100
91.1800
912.4300
8861.8200
qMC
0.0500
0.0100
0.0300
0.0400
0.1000
0.1800
0.3800
0.7800
1.6900
4.1100
MSH-MC
0.0000
0.0000
0.0000
0.0100
0.0100
0.0300
0.0600
0.1200
0.3300
0.9000
A-R
0.0084
0.0164
0.0344
0.0672
0.1372
0.2704
0.5404
1.0812
2.1676
4.3488
Table 3.2: Table of the execution times in seconds for
the vanilla call option price with different sizes of the
sequence.
ering the time it takes to reach a certain level of accuracy our method
is clearly competitive. The MSH-MC method is the fastest method for a
given point set but it suffers, along with the Acceptance-Rejection method,
from lower accuracy.
As mentioned above, we also wanted to investigate if it matters in
which order we use the three-dimensional uniform random numbers. We
tried all six combinations on how to use the uniform random numbers and
applied the sampled sequences on our test case. For a measure we looked
at the relative error, using the same number of points, and as we see from
Figure 3.3 there is really nothing to support the claim that there is one
configuration superior to the others.
The second problem we use the low-discrepancy sequence in is the
Asian option pricing that Kainhofer [52] examines. The option considered
is an Asian option with payoff defined as
n
+
n
1
1
Sti − K
= max
Sti − K; 0 ,
CT =
n
n
i=1
i=1
where 0 ≤ t1 ≤ . . . ≤ tn ≤ T . The option is sampled in weekly intervals
and the parameters for the distribution are taken from Kainhofer. To be
49
c by Martin Groth. All rights reserved.
Chapter 3. Simulation in Financial mathematics
-2
10
-3
10
-4
10
2
10
3
10
4
10
Figure 3.3: A comparison between the relative errors for
the six different ways to construct a NIG-random number
from a three-dimensional uniformly distributed random
number.
consistent with the test by Kainhofer we let the options have a maturity
of 4, 8 or 12 weeks, assuming that the year consists of 250 days. We
change the low-discrepancy sequences and use a Sobol sequence in all
simulations but retain the same pseudo-random number generators as in
the previous example. We compare the quasi-Monte Carlo simulations
with the Hlawka-Mück method and the MSH Monte Carlo algorithm,
taking the average over 25 consecutive runs of the latter. The results can
be found in Figure 3.4 and Table 3.3. We see from the simulations that
our method is not as accurate as the Hlawka-Mück method in general,
but still better than the crude Monte Carlo. In 12-dimensions we observe
that we do not get nearly as good results for the Hlawka-Mück method
as Kainhofer. This could perhaps be attributed to a better numerical
integration in Kainhofer, who uses Mathematica to do the integration
before applying the Hlawka-Mück method. We do the integration within
the method, using native Matlab routines. Also, even if the Hlawka-Mück
method gives a better result over a given number of points, we may reach
the same accuracy in shorter time with other methods using more points.
50
c by Martin Groth. All rights reserved.
3.1. Low-discrepancy sequences for the normal inverse Gaussian distribution
4 dimensions
Hlawka-Muck
MSH-QMC
MSH-MC
-1
10
-2
10
-3
10
-4
10
2
10
3
10
4
10
8 dimensions
Hlawka-Muck
MSH-QMC
MSH-MC
-1
10
-2
10
-3
10
2
10
3
10
4
10
12 dimensions
Hlawka-Muck
MSH-QMC
MSH-MC
-1
10
-2
10
-3
10
2
10
3
10
4
10
Figure 3.4: Log-Log plot of the relative errors for the
Asian call option price with different sizes of the sequence. Quasi-Monte Carlo results are from a single run,
Monte Carlo results are the average over 25 runs.
51
c by Martin Groth. All rights reserved.
Chapter 3. Simulation in Financial mathematics
Weeks
4
8
12
Points
32
64
128
256
512
1024
2048
4096
8192
16384
32
64
128
256
512
1024
2048
4096
8192
16284
32
64
128
256
512
1024
2048
4096
8192
16384
Hlawka-Mück
0.13079557
0.08679400
0.00756672
0.02703015
0.01439562
0.00420187
0.00168669
0.00168594
0.00028162
0.00007650
0.21463320
0.13227181
0.06120678
0.05128452
0.01226835
0.00059155
0.00076278
0.00229076
0.00099830
0.00079433
0.20851413
0.14369758
0.10144742
0.07342596
0.02231852
0.00874624
0.00119659
0.00161204
0.00179086
0.00209312
qMC
0.22917154
0.13956108
0.09708311
0.04289004
0.00889153
0.00435682
0.00297870
0.00094640
0.00140666
0.00104608
0.21215963
0.16674452
0.10938196
0.07369482
0.02759557
0.00788642
0.00419800
0.00386445
0.00399959
0.00114663
0.24174604
0.18370054
0.11780219
0.08446360
0.03576499
0.00870698
0.00582237
0.01052069
0.00755347
0.00045517
MSH-MC
0.17510213
0.16489862
0.09815407
0.08618908
0.04437322
0.03109834
0.02604456
0.01899270
0.01246692
0.01125160
0.18043036
0.12749196
0.08177586
0.07981546
0.03522347
0.03046898
0.02312419
0.01531812
0.01029604
0.00963255
0.13577305
0.12737709
0.12008821
0.07392190
0.05823512
0.03033949
0.02637584
0.01818145
0.00991148
0.00795023
Table 3.3: Relative errors for the Asian call option with
a maturity of 4, 8 and 12 weeks. We use the true values 0.89747876, 1.22601277 and 1.50376037 from a long
Monte Carlo simulation with the MSH-algorithm.
52
c by Martin Groth. All rights reserved.
3.1. Low-discrepancy sequences for the normal inverse Gaussian distribution
True VaR
Quasi-Monte Carlo
Monte Carlo 1
Monte Carlo 2
505
500
495
490
485
0.95
0.955
0.96
0.965
0.97
0.975
0.98
0.985
0.99
Figure 3.5: The quantile value for different levels of VaR
for our test portfolio consisting of ten options with underlying assets having normal inverse Gaussian log-returns.
The third test is inspired by Papageorgiou and Paskov [73] who constructed a portfolio consisting of 34 currency options and used quasiMonte Carlo simulations to calculate Value-at-Risk with normally distributed log-returns. Here we construct a portfolio with ten options with
log-returns being normal inverse Gaussian distributed. The parameters
for the different options are chosen such that µ = 0 for all options but
with different values for the parameters steepness α and scale δ. We also
assume that the distributions are symmetric, i.e. β = 0 for all options.
For all options we also compute the first and second moments and find
the normal distribution with the same moments. For the low-discrepancy
sequences we use a Sobol sequence and for the pseudo-random numbers
we use the function ran1 from Press et al. [77]. To get normally distributed values we use the inversion method by Moro [64]. We compute
the expected value for the portfolio, assuming the log-returns are either
normally or normal inverse Gaussian distributed. For every level of Valueat-Risk we sample 1000 portfolio values with both the Monte Carlo and
53
c by Martin Groth. All rights reserved.
Chapter 3. Simulation in Financial mathematics
Normal Monte Carlo
Normal quasi-Monte Carlo
NIG Monte Carlo
NIG quasi-Monte Carlo
0.01
0.009
0.008
0.007
0.006
0.005
0.004
0.003
0.002
0.001
0
0.95
0.955
0.96
0.965
0.97
0.975
0.98
0.985
0.99
Figure 3.6: The relative errors for different levels of VaR
for our test portfolio consisting of ten options with underlying assets having normal inverse Gaussian log-returns.
The error for the Monte Carlo simulations is the mean
of ten consecutive runs.
our quasi-Monte Carlo method. To determine the price of the portfolio
under both models we run a long simulation with Monte Carlo and at the
same time we obtain a true value for Value-at-Risk.
Results on how low-discrepancy sequences perform compared to random sequences when log-returns are normally distributed can be found in
Papageorgiou and Paskov [73]. For normal inverse Gaussian distributed
log-returns simulated with our quasi-Monte Carlo method we see from Figure 3.5 that quasi-Monte Carlo performs well compared to Monte Carlo.
We have plotted the result for two randomly chosen seeds and we see that
quasi-Monte Carlo is in general better than both the Monte Carlo simulations, which also is clear from the plot of the relative error in Figure 3.6.
We have included the result from a test with the normally distributed logreturns too and we can see that the relative error from the simulations with
normal inverse Gaussian log-returns are not worse off than the normally
distributed. The fatter tails of the normal inverse Gaussian distribution
54
c by Martin Groth. All rights reserved.
3.1. Low-discrepancy sequences for the normal inverse Gaussian distribution
Comparison between VaR for normal and NIG distributed log-returns
Normal True
NIG True
Normal QMC
NIG QMC
520
500
480
460
440
420
400
380
360
340
0.95
0.955
0.96
0.965
0.97
0.975
0.98
0.985
0.99
Figure 3.7: Comparison between the quantiles if we assume either normally distributed or normal inverse Gaussian distributed log-returns.
is anticipated to give the portfolio a higher value than in the normally
distributed case. As we see from Figure 3.7 this is the case. The quantile
estimate for the normal inverse Gaussian log-returns is approximately 140
units higher than for the normally distributed.
The results from the three tests show that the method to generate
low-discrepancy sequences from the normal inverse Gaussian distribution
is competitive with both the Hlawka-Mück method and Monte Carlo. The
method displays a good balance between speed and accuracy in all three
tests and gives reliable results. This opens up for application of quasiMonte Carlo simulations with the normal inverse Gaussian distribution,
which we know have properties desirable from a finance perspective.
55
c by Martin Groth. All rights reserved.
Chapter 3. Simulation in Financial mathematics
3.2
Option pricing in a Barndorff-Nielsen - Shepard UO-market
Pricing options in the Barndorff-Nielsen and Shepard model with meanreverting stochastic volatility is a demanding task due to the subordinator
in the squared volatility process. In the text that follows, we compute option prices with two different methods: the fast Fourier transform (FFT)
in the way introduced by Carr and Madan [23] and the indifference pricing
approach used by Benth and Meyer-Brandis [15]. The latter involves solving a Hamilton-Jacobi-Bellman integro-PDE for the indifference price. We
compare our numerical results with prices from the Black-Scholes theory.
This is joint work together with Fred Espen Benth.
3.2.1
Using the fast Fourier method
We saw in Section 2.4.2 that the fast Fourier transform can be employed
to price options when the characteristic function of the log-spot price is
analytically known. The method was developed and tested on the variance gamma model by Carr and Madan [23] and related approaches were
studied by Raible [79] and Lewis [59]. The latter two investigated models
where the underlying assets were driven by Lévy processes, such as generalised hyperbolic or normal inverse Gaussian Lévy processes. Our aim
in this section is to use the FFT-method for the Barndorff-Nielsen and
Shepard model [12]:
dSt = α(Yt )St dt + σ(Yt )St dBt ,
dYt = −λYt dt + dLλt ,
S0 = s > 0,
Y0 = y > 0.
(3.1)
(3.2)
In order to use the fast Fourier transformation we have to find the characteristic function for the model and employ this in the fast Fourier transform as shown by Carr and Madan. In the Barndorff-Nielsen and Shepard
model (3.1)-(3.2) the characteristic function depends on the specification
of the Lévy process Lλt . It is known from work by Barndorff-Nielsen and
Shepard [11, 12] that we can model the Ornstein-Uhlenbeck (OU) process
for the volatility in two ways. We can either specify the marginal distribution of the volatility and derive the density for the Lévy process L1 , or we
can define the background driving Lévy process Lt and work out the model
56
c by Martin Groth. All rights reserved.
3.2. Option pricing in a Barndorff-Nielsen - Shepard UO-market
from this. Since we are interested in the case where the log-returns of the
price process are approximately normal inverse Gaussian distributed, and
know that this happens when the volatility has an inverse Gaussian law,
the first possibility is the one we adhere to. For any self-decomposable
law D, of which the inverse Gaussian is one, there exists a Lévy process
L such that the UO-process driven by L has invariant distribution given
by D. The cumulant function of D, κD (θ) = ln E[eθD ], and the cumulant
of L, κ(θ), are related as
κ(θ) = θ
dκD (θ)
.
dθ
Since the cumulant function of the inverse Gaussian distribution IG(δ, γ)
is
1
κIG (θ) = δγ − δ(γ 2 − 2θ) /2
we have the cumulant function for the corresponding Lévy process given
by
1
κ(θ) = θδ(γ 2 − 2θ)− /2 .
The Lévy density for L is for this specification
1
1 2
δ
w(x) = √ x− 2 (1 + γ 2 x)e− 2 γ x .
2 2π
Using the key formula proved by Eberlein and Raible [30], Nicolato and
Venardos [66] calculate Laplace transforms for the price process of the
stock in the BNS-model under structure preserving equivalent martingale
measures. We know the the cumulant function of the log-price, ln[ψ(θ)] =
ln[EQ
t [exp(iθST )], under such measures. It is included in Nicolato and
Venardos contribution to the discussion of the paper by Barndorff-Nielsen
and Shepard [12], and given as
√
θ 2 + iθ
δ f1
2
[1 − exp{−λ(T − t)}]σt +
ln[ψ(θ)] = iθ(St + r(T − t)) −
2λ λ
√ f
γ
δγ δ(θ 2 + iθ)
1
√
tan−1 √
− tan−1 √
(3.3)
− −
λ
λ2 f2
f2
f2
where
f1 = γ 2 +
θ 2 + iθ
[1 − exp{−λ(T − t)}]
λ
57
c by Martin Groth. All rights reserved.
Chapter 3. Simulation in Financial mathematics
and
f2 = −γ 2 −
θ 2 + iθ
.
λ
We now know the characteristic function, i.e. the cumulant function,
for the BNS-model and hence, we can apply the methodology developed
by Carr and Madan to price options. Note that the structure preserving equivalent martingale measures are such that the risk neutral variance
process is again an Ornstein-Uhlenbeck process. This differs from the minimal entropy measure considered below, which turns the variance process
into a general jump process.
The following calculations show that it is unessential whether we use
the Fourier transform in the spot prices or strike values. The original
paper by Carr and Madan consider a Fourier transformation in the strike
price, but we find it more natural to Fourier transform using the spot
price. We still end up with a fast Fourier transform giving option prices
for a range of strike prices. Consider a call option with payoff function
/ L2 (R) and hence, we must
f (x) = max(ex − K, 0). It is clear that f (x) ∈
modify the payoff to have a square integrable function. In order to do so,
we dampen the payoff function with e−(α+1)x , α > 0 such that
−(α+1)x
fα (x) := e
e−αx − e−(α+1)x K
0
f (x) =
if x > ln K,
otherwise.
This dampening factor will make sure the payoff function is killed when
the asset price goes to infinity. We have that the modified payoff function
fα (x) can be expressed as
1
fα (x) =
2π
R
fˆα (y)e−iyx dy
where fˆα is the Fourier transform of fα
fˆα (y) =
R
fα (x)eiyx dx.
58
c by Martin Groth. All rights reserved.
3.2. Option pricing in a Barndorff-Nielsen - Shepard UO-market
Now
fˆα (y) =
∞
(e−αx − e−(α+1)x K)eiyx dx
ln K
K
1
e(−α+iy) ln K +
e(−(α+1)+iy) ln K
−α + iy
−(α + 1) + iy
e−α ln K eiy ln K
.
α2 + α − y 2 − iy(2α + 1)
= −
=
We then use this representation to get a pricing formula involving the
characteristic function φ(x) in the following way
E (eln ST − K)+ = E e(α+1) ln ST fα (ln ST )
1
fˆα (y)e−iy ln ST dy
= E e(α+1) ln ST
2π R
1
fˆα (y)E ei(−i(α+1)−y) ln ST dy
=
2π R
1
fˆα (y)φ(−y − i(α + 1)) dy
=
2π R
−α ln K iy ln K
e
e
φ(−y − i(α + 1))
1
dy.
=
2
2
2π R
α + α − y − iy(2α + 1)
If we make the change of variable y → −y we end up with
e−α ln K ∞
φ(y − i(α + 1))
ln ST
+
e−iy ln K dy
− K, 0) =
E (e
2
2 + iy(2α + 1)
π
α
+
α
−
y
0
which is exactly the same expression for the call option price as (2.18)
obtained by Carr and Madan [23] with ψT inserted, except for a discounting factor. Hence, we are free to use Fourier transforms in the spot price
instead of the strike, and still obtain option prices for a range of different
strike prices.
For numerical testing we implement the method in Matlab and choose
to consider a vanilla call option. For illustration we choose the parameters
λ = 2.4958, γ = 11.98, δ = 0.872
59
c by Martin Groth. All rights reserved.
Chapter 3. Simulation in Financial mathematics
in the BNS-model. We study two different exercise times, T = 1/4 and
T = 1, and let σ0 = 0.25. For the choice of parameters the expectation of
the Yt process in the stationary state will give a volatility of σ ≈ 0.3. We
compare the method with prices from the Black-Scholes formula, without
considering the execution times for the different approaches. For the FFTsolution we get option prices on an exponential grid consisting of 4096
different strike values. We use a suitable range of these to compute prices
from Black-Scholes to compare with. We expect that the contribution
from the subordinator will result in higher option prices for the BNSmodel compared to Black-Scholes prices with mean-reverting volatility.
It is known that the range of option prices spanned by the whole set of
structure preserving martingale measures is bounded below by
(σ ∗ )2
,
BlackScholes St ,
T −t
the Black-Scholes price with spot price St and integrated squared volatility
(σ ∗ )2 =
1
[1 − exp(−λ(T − t))]σt2 .
λ
Thus the price from the Barndorff-Nielsen-Shepard model will lay above
this Black-Scholes price, with the difference vanishing when K is far away
from S0 , which is also the case as we see from Figure 3.8. The BNS-prices
is higher for all strike prices and this feature is prominent for both the
exercise times. The prices differ clearly in an interval around the spot
price, but approach each other as K tends to zero or infinity.
The Carr-Madan method is both fast and reliable but has its limitations. The severest is that the method is quite restricted in what kind
of option types it can handle. In specific it is unable to handle path dependent options, such as Asian options. We would like to compare the
solutions from the fast Fourier method with solutions to the indifference
pricing problem described below. However, it is known that the characteristic function used in the BNS-model is under a structure preserving
equivalent martingale measure. At the moment, it is not clear to us how
the structure preserving equivalent martingale measure with cumulant
function (3.3) is related to the minimal entropy martingale measure in
the indifference pricing problem.
60
c by Martin Groth. All rights reserved.
3.2. Option pricing in a Barndorff-Nielsen - Shepard UO-market
Comparison between BNS-prices under structure preserving EMM and Black-Scholes prices, T=0.25
30
BNS-Price
B&S-price with mean-reverting volatility
25
Option price
20
15
10
5
0
70
75
80
85
90
95
100
Strike price K
105
110
115
120
125
Comparison between BNS-prices under structure preserving EMM and Black-Scholes prices, T=1
50
BNS-Price
B&S-price with mean-reverting volatility
45
40
Option price
35
30
25
20
15
10
5
0
60
80
100
120
Strike price K
140
160
Figure 3.8: Comparisons between the option prices from
the Barndorff-Nielsen-Shepard model and the BlackScholes prices. For T = 0.25 (top) the price from the
BNS-model is close to the the Black-Scholes price with
integrated mean-reverting volatility. For T = 1 (bottom)
the BNS-price is higher indicating that the jumps in the
volatility give higher prices.
61
c by Martin Groth. All rights reserved.
Chapter 3. Simulation in Financial mathematics
3.2.2
Numerical solutions of indifference pricing problems
Instead of using the fast Fourier method to obtain prices we could apply
the approach used in Benth and Meyer-Brandis [15] which we outlined
shortly in Section 2.3.1. We study an investor who has two choices; to
enter into the market herself, or to issue an option and invest the wealth.
A dynamic programming approach leads to a partial differential equation
containing an integral term. Implementing a finite difference solver for
this problem is demanding because the integral needs to be approximated
numerically. Below we propose numerical schemes and show results from
simulations. The results are compared with prices from the Black-Scholes
market.
Benth and Meyer-Brandis use a dynamic programming approach to
arrive at the following equation for the option price in the risk aversion
limit
1
Λt + σ 2 (y)s2 Λss − λyΛy
2
∞
+λ
0
(Λ(t, y + z, s) − Λ(t, y, s))
H(t, y + z)
ν(dz) = 0. (3.4)
H(t, y)
The Lévy measure is not specified further when Benth and Meyer-Brandis
derive this integro-PDE. However, when solving the occurring integroPDEs we will assume that the stationary distribution of Yt is an inverse
Gaussian law with parameters δ and γ, i.e. Yt ∼ IG(δ, γ). Then the Lévy
measure of L becomes
1
δ
3
ν(dz) = √ z − /2 (1 + γ 2 z) exp(− γ 2 z) dz.
2
2 2π
(3.5)
It is known that if Yt ∼ IG(δ, γ) then the log-returns of St will be approximately normal inverse Gaussian distributed.
Solving the value function when no claim is issued
Before we embark on computing the option price we first need to calculate
the function H(t, y) which serves as a measure change in the integral. This
function is related to the value function of the investor when she enters into
62
c by Martin Groth. All rights reserved.
3.2. Option pricing in a Barndorff-Nielsen - Shepard UO-market
the market on her own account. H(t, y) is governed by an integro-PDE of
its own, i.e.
Ht (t, y) −
α2 (y)
H(t, y) − λyHy (t, y)
2σ 2 (y)
∞
+λ
{H(t, y + z) − H(t, y)} ν(dz) = 0 (3.6)
0
with Feynman-Kac representation
1 T α2 (Yu )
du Yt = y ,
H(t, y) = E exp −
2 t σ 2 (Yu )
(t, y) ∈ [0, T ] × R+ .
(3.7)
To begin with we can observe that since the drift and volatility func√
tions in the model (2.10)-(2.11) are chosen to be α(y) = µ+βy, σ(y) = y
the function
1 µ2
1 α2 (y)
2
=−
+ 2µβ + β y
(3.8)
g(y) = − 2
2 σ (y)
2 y
has a singularity in y = 0. We know from Benth and Meyer-Brandis that
H(t, y) is continuously differentiable in t and y and bounded by
exp(a(t)y −1 + b(t)y + c(t)) ≤ H(t, y) ≤ 1,
where
µ
(exp(λ(T − t)) − 1),
2λ
β2
b(t) = − (1 − exp(−λ(T − t))),
2λ
T
φ(b(u)) du.
c(t) = −µβ(T − t) + λ
a(t) = −
t
Thus, H(t, y) is finite for all values of t and y. But from the Feynman-Kac
representation (3.7) it is not clear what value H(t, 0) may take. Even if
Y0 = y = 0, the integral in (3.7) will not be infinite since Yt is influenced
by the subordinator and hence non-zero. However, we do not know what
value H(t, 0) assumes because the contribution from the subordinator is
63
c by Martin Groth. All rights reserved.
Chapter 3. Simulation in Financial mathematics
unknown. Hence, it is hard to find an explicit boundary condition at
y = 0. One possibility is to employ a simulation technique such as Monte
Carlo to find H(t, 0), but we propose another way to attack the problem.
Despite that it is contrary to all financial intuition to have negative
volatility we will when we solve for H(t, y) expand the solution space
of y to include the whole real line. Then we have to impose boundary
conditions for large values of |y| instead, something which will be readily
found. The grid we use must by necessity avoid zero; we can not have a
grid that makes us evaluate the function (3.8) in zero because that would
result in a NaN-answer. The choice of grid for H(t, y) will also determine
the grid in y for the option price, meaning the same considerations will
have consequences there too. The integral is treated as a fully explicit
source term, and needs to be discretised. We also have to find a way to
approximate the integral outside of the grid.
To derive boundary conditions for the solution domain we look at the
function (3.8) occuring in the Feynman-Kac representation. We see that
as y → ±∞, the first term in the function will go to zero. If µ is rather
small and we choose the boundaries such that y is ”large” we can assume
that the first term is insignificant at the boundaries. If we return to
Equation (3.7), we may lift the second part of g(y) out of the expectation,
integrate it and combine it with the explicit solution (2.15). This render
us an explicit solution at the boundary given as
H(t, y) = exp(−µβ(T − t)) exp(b(t)y + c(t)),
(3.9)
with
β2
b(t) = − (1 − exp(−λ(T − t))),
2λ
T
c(t) = λ
φ(b(u)) du.
t
This line of thought also suggests a way to handle the integral outside of
the solution domain. If we can approximate the solution at the boundary
with the explicit solution for the special case µ = 0, we may as well
approximate H(t, y) outside the domain in this manner. This would give
a way to assure us that we always evaluate the integral over a domain large
enough to incorporate all essential parts. That is, even at the boundary we
will have sufficiently many points for the evaluation of the integral. The
64
c by Martin Groth. All rights reserved.
3.2. Option pricing in a Barndorff-Nielsen - Shepard UO-market
domain of the integration should be chosen so that the influence beyond
the domain is insignificant because the measure is small. Since H(t, y) is
not growing in y the integrand will die out as z grows.
The integral term poses some additional problems. One is that since
the Lévy measure is allowed to have infinite mass in an open interval
around zero, it may tend to infinity if we let z ↓ 0. Considering the
inverse Gaussian case, with Lévy measure (3.5), the measure will have a
singularity at zero. If we look at the integrand for the special case µ = 0,
where we have an explicit solution, we see that
1
δ
3
(H(t, y + z) − H(t, y)) √ z − /2 (1 + γ 2 z) exp(− γ 2 z) =
2
2 2π
2z
γ
δ exp(b(t)y + c(t) − /2)
3
1
√
(ez − 1)(z − /2 + γ 2 z − /2 ) . (3.10)
2 2π
Now, ez − 1 will go almost linearly to zero as z → 0, and hence, (3.10)
will go as z −1/2 . The integration is from zero, which would force us to
make a division by zero in the numerical evaluation, but we can avoid this
problem by starting the integration at ∆y. This is the first point available
to us. However, if the parameters are such that much of the mass of the
measure lays before this point, the integral will not be correctly evaluated.
Adding to the problem, taking ∆y to be very small will give a cumbersome
and very dense mesh. One way to bypass this problem may be to find an
approximation for the part of the integral that we miss. One suggestion
is that this part could constitute a diffusion term which should be added
to the integral-PDEs, both for H(t, y) and the option prices, but this idea
has not yet been tested.
For the solver we use a tridiagonal solving routine, see Thomas [86],
and derive an implicit Lax-Wendroff scheme for our non-homogeneous
hyperbolic equation. If we start by looking at the homogeneous case,
disregarding the integral term for a while, we see that we could write this
as
Hτ (τ, y) + g(y)H(τ, y) + a(y)Hy (τ, y) = 0,
where a(y) = λy, g(y) is as in (3.8) and we make the time change τ = T −t.
65
c by Martin Groth. All rights reserved.
Chapter 3. Simulation in Financial mathematics
To derive the Lax-Wendroff scheme we observe that
Hτ τ
= (−gH − aHy )τ = −gHτ − aHyτ = −gHτ − aHτ y
= −gHτ − a(Hτ )y = −g(−gH − aHy ) − a(−gH − aHy )y
= g2 H + agy H + 2agHy + ay aHy + a2 Hyy .
Using the Taylor expansion in τ we have that
∆τ + (Hτ τ )n+1
Hkn+1 = Hkn + (Hτ )n+1
k
k
∆τ 2
+ O(∆τ 3 )
2
= Hkn + (−gH − aHy )n+1
∆τ
k
+(g2 H + agy H + 2agHy + ay aHy + a2 Hyy )n+1
k
∆τ 2
2
+O(∆τ 3 )
agy ∆τ 2
g2 ∆τ 2
n
− g∆τ +
Hkn+1
= Hk +
2
2
n+1
n+1
Hk+1 − Hk−1
aay ∆τ 2
2
2
+ O(∆y )
+ ag∆τ − a∆τ +
2
2∆y
n+1
n+1
− 2Hkn+1 + Hk−1
Hk+1
2
2
2
+ O(∆y ) + O(∆τ 3 )
+a ∆τ
2∆y 2
where Hkn is H evaluated at the point (n, k) in the (τ, y) grid and a = λy.
To get a second order scheme both in time and space we now disregard
higher order terms. Rewriting the Taylor expansion slightly, we end up
with the implicit Lax-Wendroff scheme:
λ∆τ
agy ∆τ 2
R
n+1
−1 +
+ g∆τ − R Hk−1
+ g∆τ Hkn+1
+ 1 + R2 −
2
2
2
λ∆τ
R
n+1
1−
− g∆τ − R Hk+1
+
= Hkn (3.11)
2
2
where R = λyk ∆τ /∆y.
A conscientious survey of the convergence properties of this scheme,
including the integral term, is necessary to ensure that it will converge to
the correct answer. We shall return to this in future research, but will for
66
c by Martin Groth. All rights reserved.
3.2. Option pricing in a Barndorff-Nielsen - Shepard UO-market
now only consider a stability analysis of the homogeneous scheme, using
the discrete Fourier transform. Considering Equation (3.11) we see that
the symbol of the difference scheme is
−1
ρ(ξ)
λ∆τ
gy (y)λy∆τ 2
= 1 − g(y)∆τ −
Ri sin ξ−R2 (cos ξ+1)+1−
+g(y)∆τ
2
2
As usual, to assure stability we need for the simplest analysis |ρ(ξ)|2 <
1, ∀ξ. This is not easy to see, but an examination gives that the LaxWendroff scheme is stable except in a region around y = 0, where the
influence from the term g(y) makes it unstable. However, the region is
dependent on all the involved parameters µ, λ, β, ∆τ, ∆y, and it may be
possible to shrink it to desired length by a clever choice of the latter two.
For the special case µ = 0 we can prove that a sufficient condition for
stability is that
2
1
−λ .
y< 2
β
∆τ
For moderate values of β and λ this condition is easy to satisfy by a careful
choice of the solution area and step length.
Solving the value function with a claim issued
In the previous section we solved the case when the investor entered the
market without issuing an option. We now turn our attention to the case
when she issues a claim and the resulting indifference pricing problem.
We are going to propose finite difference schemes to solve the PDE
1
Λt + σ 2 (y)s2 Λss − λyΛy
2
∞
+λ
0
(Λ(t, y + z, s) − Λ(t, y, s))
H(t, y + z)
ν(dz) = 0 (3.12)
H(t, y)
Since the option pricing is a problem in two spatial dimensions we use
Gudonov dimensional splitting [39] and following Strang [85] we approximate the exact solution operator by successive use of one-dimensional
operations, i.e.
y
s ∆t n
Λ0 .
S(T )Λ0 ≈ S s ∆t
2 S (∆t)S
2
67
c by Martin Groth. All rights reserved.
Chapter 3. Simulation in Financial mathematics
Here S(T ) is the exact solution operator approximated by S s (t) and S y (t),
which are one-dimensional solution operators when (3.12) is splitted in
the two dimensions and we iterate over n iterations. Splitting the problem
leads us to the question when to include the integral term. Since we treat it
as a non-homogeneous term, integrating over y, it seems natural to include
the integral in the step solving in the y-direction. More information about
dimensional splitting for conservation laws can be found in Kröner [54].
For both spatial dimensions we need to restrict the solution to a
bounded domain to be able to use the finite difference method. This
will force us to assign boundary conditions on all four sides of the domain. The restriction of the option pricing problem to a bounded domain
is similar to the problems discussed in a series of papers by Barles et al.
[6, 7, 8]. For a European option in the Black-Scholes market, as usually
transformed to a heat equation, they prove that setting artificial boundary conditions only leads to errors in boundary layers. The convergence
in the interior is exponential and uninfluenced by the boundary conditions. We note that in the step when we solve for S this is nothing but a
Black-Scholes equation and solving for y is a non-homogeneous transport
equation. Therefore we are confident that the results from Barles et al. are
suitable also for our problem. Barles [6] also briefly discusses dimensional
splitting for problems arising in finance theory, which we now will apply.
For s the splitted equation is a heat equation with Dirichlet boundary
conditions, the conditions will be examined below. In the solver we need a
finite difference scheme and we decide to use the simplest implicit scheme:
n
Λn+1
k,l − Λk,l
∆t
σ 2 (yk )s2l
−
2
n+1
n+1
Λn+1
k,l+1 − 2Λk,l + Λk,l−1
∆s2
= 0.
For the solution operation S y we use the same approach as for H(t, y) to
derive a non-homogeneous Lax-Wendroff scheme:
Λtt = (−aΛy )t = −aΛyt = −aΛty = −a(Λt )y
= −a(−aΛy )y = aay Λy + a2 Λyy ,
68
c by Martin Groth. All rights reserved.
3.2. Option pricing in a Barndorff-Nielsen - Shepard UO-market
where a = a(y) = λy. Using the Taylor expansion in t we have that
= Λnk + (Λt )n+1
∆t + (Λtt )n+1
Λn+1
k
k
k
∆t2
+ O(∆t3 )
2
2
n+1 ∆t
2
+ O(∆t3 )
∆t
+
(aa
Λ
+
a
Λ
)
= Λnk + (−aΛx )n+1
y
y
yy
k
k
2
n+1
Λk+1 − Λn+1
k−1
n
2
= Λk − a
+ O(∆y ) ∆t
2∆y
n+1
n+1
aay ∆t2 Λk+1 − Λk−1
+ O(∆y 2 )
+
2
2∆y
n+1
n+1
n+1
a2 ∆t2 Λk+1 − 2Λk + Λk−1
+ O(∆y 2 ) + O(∆t3 )
+
2
∆y 2
where Λnk is Λ evaluated at the point (n, k) in the (t, y) grid. Rewriting
this gives the scheme
R λR∆t R2
R λR∆t R2
n+1
2
n
−
−
−
+(1+R
)Λ
+
− +
Λn+1
Λn+1
k−1,l
k,l
k+1,l = Λk,l
2
4
2
2
4
2
with R = λyk ∆τ /∆y. For the stability we see that the symbol is
|ρ(ξ)|2 =
1 + (R4 +
2R2 ) sin2 ( 2ξ ) +
1
R2 1 −
λ∆τ 2
sin2 (ξ)
2
+ R4 cos2 (ξ)
for the homogeneous equation and it is clear that |ρ(ξ)|2 ≤ 1 ∀ξ. Hence,
the scheme is unconditionally stable. Including the integro-PDE on the
right hand side, i.e. the trapezoid sum, gives the whole scheme.
Turning the attention to the boundary conditions we have to impose if
we restrict the solution to a bounded domain, we see from (3.12) that the
singularity from the function g(y) is not present here. Still, since H(t, y)
appears in the integrand we will avoid to evaluate the integral in y = 0
since we do not have a value for H(t, 0). As before we will assume we can
integrate from y = ∆y instead. At the same time, since the option prices
do not really make sense for negative volatility it is natural to have zero
as the left boundary. At y = 0 we see that the Equation (3.12) reduces to
69
c by Martin Groth. All rights reserved.
Chapter 3. Simulation in Financial mathematics
the simple PDE
Λτ − λ
∞
(Λ(τ, z, s) − Λ(τ, 0, s))
0
H(τ, z)
ν(dz) = 0.
H(τ, 0)
(3.13)
This also gives the possibility to get boundary conditions, solving (3.13)
on the boundary for every time step. For the boundary at S = 0 we have
the usual condition that if the stock is worth zero it will remain at zero
for its whole life span. Then clearly the value of the option is at any time
equal to the payoff with St = 0.
For the two remaining boundaries we need to argue why it is possible
to use the Black-Scholes price as boundary conditions. We know from
the Black-Scholes framework that as σ → ∞ and S → ∞ the price of a
European call option will tend to the stock price. Similarly, for a European
put option the price of the option will tend to the strike price. See Lewis
[58] for a discussion of large volatility asymptotica for stochastic volatility
models where the volatility process is driven by Brownian motions. For
the far boundary of y in the Barndorff-Nielsen-Shepard model we note
that under the historical measure P we have the explicit representation
for the squared volatility
Yt = y exp(−λt) +
0
t
exp(−λ(t − u)) dLλu .
We note that if y → ∞ then the second term is small compared to the
first, in a short time frame. Hence, for shorter time periods and large
Y0 = y then Yt ≈ y exp(−λt), and thus we have a deterministic volatility.
This means the stock dynamics will be
dSt = rSt dt + ye−λt St dBt
where r is the constant risk-free rate of return. Since both rate and the
volatility are deterministic, though the latter is not constant, we can use
the Black-Scholes formula to compute the price for the option under this
dynamics. We therefore conclude that when y is ”large” we can let
Λ(t, y, s) ≈ ΛBS (t, y, s)
70
c by Martin Groth. All rights reserved.
3.2. Option pricing in a Barndorff-Nielsen - Shepard UO-market
where ΛBS (t, σ, s) is the price of the option in the Black-Scholes framework. A similar consideration should be possible to make under the minimal entropy measure but that remains to be proved. Observe that when
we use the Black-Scholes formula to acquire boundary values
√ we have to
modify it to handle non-constant volatility, i.e instead of σ T − t in the
formula we will have
T
t
(ye−λτ )dτ =
(e−λt − e−λT )y
.
λ
What remains to investigate is the far boundary of S with moderate values
of y. From the risk neutral valuation we know that for a European call
we have
Λ(t, y, s)
K
t,1,y
Q
= E max(ST − , 0)
s
s
where STt,s,y is the asset price with St = s. When s is large then K/s is
small and the probability that STt,1,y > K/s tends to 1. This gives that
K
K
Λ(t, y, s)
≈ EQ STt,1,y −
=1−
s
s
s
since STt,1,y is a Q-martingale. Hence, Λ(t, y, s) ≈ s − K and if s is large
compared to K then s − K ≈ C BS (t, y, s), the price for the call option in
the Black-Scholes model. As above we have to use the integrated volatility
over the time period in the Black-Scholes model. This gives us boundary
conditions on all of the boundaries in the model.
The next problem is that if we choose to have a boundary at y = 0
and use a uniform grid it will not be coherent with the grid for H(t, y).
Actually, using the same step size, every grid point of the asset price will
be right in between two grid points of H(t, y) and vice versa. To avoid
this we need to use a non-uniform grid, more precisely we need to take a
step with half the step size for the first grid cell. To use such a grid we
need to work out a finite difference scheme for the non-uniform part of the
grid. We do this using the method of undetermined coefficients. Taking
71
c by Martin Groth. All rights reserved.
Chapter 3. Simulation in Financial mathematics
the Taylor expansion around a point in the second row in y we see that
1
n
n
= vk,l
+ (vy )nk,l ∆y + (vyy )nk,l ∆y 2 + O(∆y 3 )
vk+1,l
2
∆y 2
1
n
n
n ∆y
n
vk−1,l = vk,l − (vy )k,l
+ (vyy )k,l
+ O(∆y 3 ).
2
2
2
Applying the method of undetermined coefficients and disregarding higher
orders we get
n
n
n
+ bvk,l
+ cvk−1,l
=
avk+1,l
(a + b +
n
c)vk,l
1
a∆y 2 c∆y 2
n
+ (a∆y − c∆y)(vy )k,l +
+
(vyy )nk,l .
2
2
8
To get an approximation to a first order derivative we see that we have to
choose a, b and c to satisfy
a+b+c = 0
1
a∆y − c∆y = 1
2
1
1
a∆y 2 + c∆y 2 = 0.
2
8
The solution to this equation system gives the approximation
Λy (n∆t, k∆y, l∆s) ≈
1
(−4Λnk−1,l + 3Λnk,l + Λnk+1,l ),
3∆y
and same procedure will give us
Λyy (n∆t, k∆y, l∆s) ≈
4
(2Λnk−1,l − 3Λnk,l + Λnk+1,l ).
3∆y 2
Using these approximations we get the following finite difference scheme
λR∆t
4R 2λR∆t 4R2
n+1
2
+
−
Λk−1,l + 1 + R + 2R −
Λn+1
−
k,l +
3
3
3
2
R λR∆t 2R2
n
−
Λn+1
− −
k+1,l = Λk,l .
3
6
3
72
c by Martin Groth. All rights reserved.
3.2. Option pricing in a Barndorff-Nielsen - Shepard UO-market
Integro-PDEs arising in finance has been studied from a convergence
point of view in Amadori [1], Amadori, Karlsen and La Chioma [2] and
Jakobsen and Karlsen [48]. Our intention in the continuation is to study
their research and from it deduce convergence results for our finite difference integro-PDE solutions. The results from the simulation we refer to
below indicates that the schemes we suggest are working satisfactory but
the theoretical justification has yet to be done.
Results from the numerical option pricing
We have proposed schemes to handle the partial differential equations
for both the case where a claim is issued and not. All the schemes are
implemented and we can now show some results from the simulations,
starting with the solution to (3.6). We choose to use the parameters given
in Nicolato and Venardos [66]:
ρ = −4.7039, λ = 2.4958, γ = 11.98, δ = 0.0872.
They use a data set of 87 European call options for six different maturities
on the S&P 500 index and fit an inverse Gaussian Ornstein-Uhlenbeck
process by minimising the mean square error. Their model includes a
leverage parameter ρ which we do not incorporate in our model. They do
not mention any value for the parameter β, so we feel free to try a few
different values.
The solution for the function H(t, y) is important since the function
occurs as a measure change in the integral of the partial differential equation (3.4. Therefore we need to simulate H(t, y) before we can start the
simulation of the option price. Figure 3.9 displays solutions for H(t, y)
both with µ = 0 and µ > 0, including the explicit solution (2.15) when
applicable. We see that when µ is non-zero the solution will have a sharp
turn downwards as we approach zero from above. The effect is not as
visible in all plots in Figure 3.9 since the grid size is too coarse to capture
this feature when β is large, i.e. β = 0.5. To see the development of the
solution when we solve backwards in time we mesh the solution of H(t, y)
over time in Figure 3.10.
In Figure 3.11 we see a small display of what solutions from the integroPDE solver look like for the option prices. The simulation was conducted
73
c by Martin Groth. All rights reserved.
Chapter 3. Simulation in Financial mathematics
Solution with beta = 0.05, mu = 0, gamma = 11.98, delta = 0.0872, lambda = 2.4958
Solution for H(t,y) with beta = 0.05, mu = 0.1, gamma = 11.98, delta = 0.0872
1
1
0.995
0.995
0.99
0.99
0.985
0.985
0.98
H(0,y)
H(0,y)
0.98
0.975
0.975
0.97
0.97
0.965
0.965
0.96
0.96
Explicit solution
Simulated solution
0.955
0.95
5
10
15
20
0.955
0.95
25
5
10
15
y
20
y
Solutions with beta = 0.5, mu = 0, gamma = 11.98, delta = 0.0872, lambda = 2.4958
Solution with beta = 0.5, mu = 0.1, gamma = 11.98, delta = 0.0872, lambda = 2.4958
1
1
0.9
0.8
0.8
0.7
0.7
H(0,y)
H(0,y)
Explicit solution
Simulated solution
0.9
0.6
0.6
0.5
0.5
0.4
0.4
0.3
0.3
0.2
5
10
15
20
0.2
5
10
y
15
y
Figure 3.9: Figures from the simulation of H(0, y) with
the parameter values from Nicolato and Venardos and
different values for β and µ.
74
c by Martin Groth. All rights reserved.
20
25
3.2. Option pricing in a Barndorff-Nielsen - Shepard UO-market
Solution development over time from terminal time 1 to 0
1
0.99
H(t,y)
0.98
0.97
25
0.96
20
0.95
15
10
0.94
1
0.9
0.8
0.7
0.6
5
0.5
0.4
0.3
0.2
0.1
0
0
y
t
Figure 3.10: Simulations of H(t, y), with the parameter
values from Nicolato and Venardos, showing the development over time, given the terminal condition H(1, y) = 1.
75
c by Martin Groth. All rights reserved.
Chapter 3. Simulation in Financial mathematics
Indifference prices for a European call, T=1, K =200, BNS and IG parameters from Nicolato & Venardos
120
100
Option price
80
60
40
20
0
300
1
250
0.8
200
0.6
150
0.4
100
0.2
50
s
0
y
Figure 3.11: Option prices for the indifference pricing
problem with the stationary distribution of the volatility
process being inverse Gaussian.
with an inverse Gaussian law for the stationary distribution of the volatility process with parameters for the distribution taken from Nicolato and
Venardos. For this particular simulation the only intention was to create
an image of a solution so the grid is coarse on purpose. We have not
plotted the whole solution area which was (s, y) ∈ [0 600] × [0 1.99].
To get a better picture of how the solution of the indifference pricing
relates to prices from the Black-Scholes theory we need first to determine
what volatility we should use in the Black-Scholes formula. Since the
volatility process Yt has a stationary distribution we suggest the following
procedure: We find the expectation of Yt in the stationary state and let
the square volatility in Black-Scholes, σ 2 , be equal to this expectation.
We should then also choose the starting value y for the process Yt in the
Barndorff-Nielsen-Shepard model to be σ 2 . This means we compare Black76
c by Martin Groth. All rights reserved.
3.2. Option pricing in a Barndorff-Nielsen - Shepard UO-market
Indifference price and Black-Scholes price with the volatility equal to the expectation of the Y process
Difference between indifferenceprice with y=0.0075 and Black-Sholes price with vol=0.0872/11.98
t
50
0.2
Indifference price
Black-Scholes price
45
0.1
40
0
35
Difference
Option price
30
25
-0.1
-0.2
20
15
-0.3
10
-0.4
5
0
150
160
170
180
190
200
S
210
220
230
240
250
-0.5
0
100
200
300
S
400
500
600
Figure 3.12: Plots of the indifference prices and prices
from Black-Scholes theory and the difference between
them. The Black-Scholes volatility is chosen to be equal
to the expectation of the stationary distribution to the
Yt -process.
Scholes prices with constant volatility to our indifference prices which have
a volatility fluctuating around this constant level. As we see in Figure 3.12
the two price curves are very similar, with the indifference prices slightly
lower around the strike price and higher further out. The influence from
the heavy tails is not as evident in the indifference prices as we expected.
This might be attributed to the choice of parameters which makes the
expected volatility comparably small, only 8.5%.
If we instead choose the volatility for the Black-Scholes prices to be the
integrated mean-reverting part of the Yt -process we face another situation.
We then expect the subordinator to influence volatility for the BarndorffNielsen-Shepard model, leading to higher prices. The situation is similar
to the one Section 3.2.1, and we know that the Black-Scholes price form the
lower bound for the Barndorff-Nielsen-Shepard price. In Figure 3.13 we
have plotted the difference between the indifference prices and the BlackScholes prices. We see clearly that the Barndorff-Nielsen-Shepard price
is higher than the price from Black-Scholes, especially for low volatilities
and around the strike price. It appears that the difference is fading out
as we go further out in both S and y, which is what we assume for the
77
c by Martin Groth. All rights reserved.
Chapter 3. Simulation in Financial mathematics
Difference between indifference price and Black-Scholes price with mean-reverting volatility
3.5
3
Difference
2.5
0
2
0.1
1.5
0.2
1
0.5
0.3
0
0.4
0
100
200
300
y
400
500
600
S
Figure 3.13: Plot of the difference between the indifference price and Black-Scholes price with integrated meanreverting volatility.
78
c by Martin Groth. All rights reserved.
3.2. Option pricing in a Barndorff-Nielsen - Shepard UO-market
boundary conditions.
The results presented from the integro-PDE solver are snapshots from
an ongoing research project. The solver is continuously improved and
there are numerous things waiting to be added to the system. The results above give evidence that the system is reliable, but still it has to
be more thoroughly tested. The development will continue by considering the same approach for Asian options, which means we have to add
one more dimension. One interesting question to investigate would be how
two different actors, believing in either the Black-Scholes or the BarndorffNielsen-Shepard model, would price an option if we simulate the dynamics
for the models with a common Brownian motion.
79
c by Martin Groth. All rights reserved.
Chapter 3. Simulation in Financial mathematics
3.3
Root finding using quasi-Monte Carlo and
Newton’s method
Many problems in financial engineering can be cast as root finding problems. One important type of problem which can be recasted in this fashion
is the estimation of Value-at-Risk. The problem is to find a quantile of a
random variable describing the investment return or position for a given
risk level. To assess the risk of a portfolio the investor tries to find the
value that she with a certain probability is not going to lose. To calculate the quantile, one could perform a Monte Carlo simulation of the
random variable, for example simulate paths for the stocks in a portfolio. Such simulations can easily become time consuming and inefficient
when the considered portfolio involves many assets. One alternative is
to use quasi-Monte Carlo simulation, which has to be adopted since it is
based on the simulation of deterministic sequences of numbers rather than
(pseudo-)random sequences. Hence, we can not estimate the quantile, per
se. However, we can rewrite the quantile calculation as the evaluation of
an expectation, and combined with a fixed-point method one can easily
use quasi-Monte Carlo. Another type of problem which can be cast in a
suitable fashion is finding implied parameters from given data, such as option prices. Estimating the implied volatility is clearly the most prominent
example of this.
We suggest a method of solving root finding problems using a quasiMonte Carlo method combined with Newton’s method. We implement
the model and try it on two different problems: calculating the Value-atRisk of an investment position and finding the implied scale parameter
δ in a market with log-returns of stocks being normal inverse Gaussian
distributed N IG(α, β, δ, µ). This is joint work together with Fred Espen
Benth and Paul C. Kettler.
3.3.1
Description of the method
Root finding is a well known problem in mathematics. The combination
with quasi-Monte Carlo to evaluate the involved functions and derivatives
has not been studied so far, to our knowledge. The method is described
for the problem of measuring the Value-at-Risk but the general procedure
80
c by Martin Groth. All rights reserved.
3.3. Root finding using quasi-Monte Carlo and Newton’s method
is similar for other root finding problems. Let X(T ) > 0 be a random
variable describing the portfolio position at time T . We are interested in
finding the Value-at-Risk VaRT (α) for a given risk level α ∈ (0, 1) at time
T , defined as:
Pr [X(T ) ≤ VaRT (α)] = α
We can rewrite this as
E 1{X(T )≤VaRT (α)} = α
To this end, define the function g : R+ → [0, 1] as
g(β) = E 1{X(T )≤β}
and note that VaRT (α) is a solution of the equation g(β) = α. We can find
this solution by using a fixed-point iteration (e.g., Newton’s Method) in
conjunction with some simulation method enabling us to calculate g(β) for
a given β. We suggest using quasi-Monte Carlo techniques for the latter.
Letting β0 ∈ R+ be our initial guess of VaRT (α), we can use Newton’s
Method to iterate as follows:
βn+1 = βn −
g(βn ) − α
.
g (βn )
We now elaborate a bit on the form of g. We let X(T ) be the value of
a portfolio of n risky assets or a mixture of assets and options on these,
represented as
n
fi S1 (T ), . . . , Sm (T ) .
X(T ) =
i=1
Here Sj (t), j = 1, . . . , m is an m-dimensional geometric Brownian motion
and fi are the pay-off functions. If asset number j is a stock, then we
have fj (x1 , . . . , xm ) = xj , while if it is a call option we can write it as
fj (x1 , . . . , xm ) = [xj − K]+ . However, the specification of the fj ’s can be
chosen rather freely. We conclude with
g(β) = E 1{0≤Pn fi (S1 (T ),...,Sm (T ))≤β } .
i=1
81
c by Martin Groth. All rights reserved.
Chapter 3. Simulation in Financial mathematics
3.3.2
Numerical results
The method outlined above was implemented in C++ and tested. The
implementations use an ordinary Newton-Raphson’s method and a Sobol
sequence [84] to generate the uniform quasi-random numbers. For the
numerical derivative we keep track of the closest point larger than the
current estimate. We then use the difference between the function values
at the two points divided by the distance between them as the numerical
derivative. A better way might be to also keep track of the closest value
smaller than the estimate and use this as the lower point to get a somewhat
centered value for the difference. However, that would mean we have to
do more operations, which inevitably slows down the process.
Our test case is a portfolio consisting of ten options. We use normal
inverse Gaussian log-returns employing the quasi-Monte Carlo sampling
algorithm we proposed in Section 3.1, and let every option have different
parameters to reflect a diverse range of heavy tails. Instead of estimating
the possible loss we rather calculate the quantile, out of convenience. As
a true value we use a Monte Carlo simulation over 100 000 points using
the Michael, Schucany and Haas [63] algorithm (MSH).
One concern we must address is the problem with the number of points.
When using a Sobol sequence to generate quasi-random numbers we would
preferably use 2k number of points, where k is a positive integer. However,
presume we are interested in Value-at-Risk at a 5 % level. If we use
210 = 1024 points and sort the points, we would look for the point in
position 0.05 ∗ 1024. This value is not an integer and hence, we are not
able to pick out one number from the sequence which is the quantile. It is
clear that we must use a number of points such that the position we seek is
an integer, with the risk that this practice would demolish the advantage
of the quasi-random numbers.
Take n number of points and let the desired level of Value-at-Risk be
denoted VaR. The way our method works means we can not hope for a
better value for VaR than between the n ∗ VaR-point and the point above
this in the sorted point set, see Table 3.4 and Figure 3.14. We observe
that with the low-discrepancy sequence we underestimate the quantile for
all levels but have not found any explanation for this. The hope is that
our method is faster than the procedure to sort the points in order to find
82
c by Martin Groth. All rights reserved.
3.3. Root finding using quasi-Monte Carlo and Newton’s method
VaR
0.010
0.020
0.014
0.016
0.018
0.020
0.022
0.024
0.026
0.028
0.030
0.032
0.034
0.036
0.038
0.040
0.042
0.044
0.046
0.048
True
4.2166
5.1591
6.0225
6.9381
7.8956
8.7591
9.6287
10.4094
11.2482
11.9398
12.8199
13.5697
14.3761
15.1415
15.9424
16.6828
17.5082
18.3226
19.0592
19.7754
Sorting
3.8483
3.9128
4.5565
4.8286
5.4323
6.3773
7.0618
8.4053
9.1187
10.6132
11.6665
12.5485
14.1657
14.4826
14.9184
15.5063
16.0907
16.3529
16.5205
17.8377
Newton
3.8483
4.0000
4.5565
4.8286
5.6703
6.3773
7.8710
8.7925
9.4216
10.8920
11.6665
13.3410
14.1657
14.6097
15.4281
15.5063
16.0907
16.3529
17.2845
17.8994
Table 3.4: Results for Value-at-Risk, in order: True
over 100 000 points, quasi-Monte Carlo with sorting and
quasi-Monte Carlo combined with a Newton’s method.
Observe that it is not the loss but the quantile we estimate.
83
c by Martin Groth. All rights reserved.
Chapter 3. Simulation in Financial mathematics
20
18
16
14
12
10
8
6
True
Quasi-MC with sorting
Q-MC with Newton
4
2
0.01
0.015
0.02
0.025
0.03
0.035
0.04
0.045
0.05
Figure 3.14: Plots of the quantile value for our test portfolio.
the VaR point. In order to test this, we run 10 consecutive runs and take
the mean value over these runs to smooth computer dependent variations.
As seen in Table 3.5, our method is comparable to the time it takes to sort
the numbers and find the quantile. However, if we take a closer look at
the time consuming parts of the algorithm we see that drawing the quasirandom numbers and evaluating the portfolio takes roughly 0.20 seconds.
This can be compared with the time of sorting 1000 points, which takes
about 0.004 seconds. Hence, the time to gain with our approach is insignificant compared with the time consumed by the portfolio evaluation.
We also tried bigger samples but the results are comparable. It seems as
there is not much time to gain with our method compared to the sorting
method if we can not find a way to use the information from the Newtonstep incorporated in the quasi-Monte Carlo step. However, it could be
that such an approach would force us to recalculate the portfolio values,
which we know may be costly in time.
It appears that the method proposed does not show any improvement
when calculating the Value-at-Risk. We therefore turn to our other appli84
c by Martin Groth. All rights reserved.
3.3. Root finding using quasi-Monte Carlo and Newton’s method
VaR
0.010
0.012
0.014
0.016
0.018
0.020
0.022
0.024
0.026
0.028
Sorting
0.256397
0.235974
0.266168
0.214551
0.235424
0.204791
0.261452
0.249517
0.238459
0.233685
Newton
0.241291
0.249520
0.215514
0.272042
0.266426
0.214724
0.239493
0.220421
0.236495
0.238318
VaR
0.030
0.032
0.034
0.036
0.038
0.040
0.042
0.044
0.046
0.048
Sorting
0.232662
0.254411
0.209714
0.275124
0.214633
0.206088
0.205839
0.201311
0.254594
0.196902
Newton
0.271422
0.211206
0.248633
0.238863
0.211679
0.204452
0.229958
0.225077
0.238070
0.234068
Table 3.5: Times to calculate Value-at-Risk for quasiMonte Carlo with sorting and quasi-Monte Carlo with
Newton’s method.
MC
Quasi-MC with sorting
Q-MC with Newton
0.3
0.25
0.2
0.15
0.1
0.05
0.01
0.015
0.02
0.025
0.03
0.035
0.04
0.045
0.05
Figure 3.15: Plots of the times to calculate VaR for 1000
points.
85
c by Martin Groth. All rights reserved.
Chapter 3. Simulation in Financial mathematics
cation of the method, finding parameters implied from given prices. We
could imagine that we have option prices quoted on some market and a
model for the dynamics of the underlying assets. For example, we could
imagine that the underlying asset follows some stochastic model making
the log-returns normal inverse Gaussian distributed. Since the method
can only work with one single parameter we must for a four-parameter
distribution, such as the normal inverse Gaussian, have some other way
to assess the other three parameters beforehand. When we have the other
parameters in place it is an easy task for the algorithm to find the remaining parameter sought after from the given price.
The parameter finding problem differs from the VaR estimation in one
crucial way. In every step we can use the best estimate to recalculate the
option prices we simulate with quasi-Monte Carlo. It is not necessary to
sample new random numbers, but we must recalculate the prices with the
new parameters. In this way we have new input in every step and have a
much different accuracy than for the Value-at-Risk simulation above.
We start testing the method with a European call option. The method
is implemented in C++ and we use a very long Monte Carlo simulation to
get a ”true value” for the option, which will be the designated target.
We use parameter values from Rydberg [81] for the NIG-parameters and
choose the set of parameters for Deutsche Bank as our test example. The
estimated value of the scale parameter is in this case δ = 0.012, but to test
the model we try a range of values such that δ ∈ [0.001, 0.002, . . . , 0.02].
To avoid some numerical difficulties arising because δ is non-negative the
simulations work with the squared parameter δ2 instead of the parameter
itself. In the Newton’s method we implement a few different termination
criteria. Since the method compares option prices and not parameters the
main criterion is that we have an agreement between the simulated and the
given price up to a certain precision. Next, to avoid lengthy simulations we
put an upper bound on the number of iterations. Finally, to avoid having
the method iterating back and forth until the number of iterations hits
the boundary we keep track of the two latest simulated parameter values
and terminate if they happen to equal. We found that using 4096 points
for the quasi-Monte Carlo method gives a good balance between speed
and accuracy in the simulations. We see from Table 3.6 that the method
finds the given value of δ within a few percent relative error in about one
86
c by Martin Groth. All rights reserved.
3.3. Root finding using quasi-Monte Carlo and Newton’s method
δ
0.001
0.002
0.003
0.004
0.005
0.006
0.007
0.008
0.009
0.010
δ̂
0.00098
0.00192
0.00287
0.00390
0.00494
0.00599
0.00698
0.00799
0.00898
0.00993
Time
0.30912
0.69724
0.22056
0.34375
0.20619
0.17977
0.18817
0.18907
0.18820
0.18844
δ
0.011
0.012
0.013
0.014
0.015
0.016
0.017
0.018
0.019
0.020
δ̂
0.01090
0.01177
0.01269
0.01357
0.01460
0.01563
0.01664
0.01768
0.01869
0.01968
Time
0.17700
0.19173
0.21593
0.18810
0.17739
0.17744
0.17814
0.19812
0.18875
0.17994
Table 3.6: Simulated δ with a combination of Newton’s
method and quasi-Monte Carlo simulations. The right
column gives the time until the methods terminates. The
relatively long time in the second row is due to the maximal number of iterations being exceeded before any terminal condition was met.
fifth of a second when the method terminates without reaching the limit
of iterations. The second row is the exception, where the method hits the
limit before converging and hence also has a longer simulation time. It
should be noted that the method compares option prices with a precision
of order 10−5 , which is probably much more precise than what is quoted
as market prices. If we had quoted prices with two or three decimals the
estimation would differ much more. Also, the Monte Carlo simulation of
the ”true price” adds some additional errors which we do not have if we
consider the quoted price as the true observed price.
This method easily extends to path dependent options such as Asian
options. To illustrate this we implement the method using a 10 days
Asian option with daily normal inverse Gaussian distributed log-returns
and parameters as above. As a target we again simulate a ”true price”
with a Monte Carlo simulation over one million points. We apply a Sobol
sequence for the low-discrepancy numbers and the effective dimension is
30, since we need 10 NIG-dimensions and it takes three dimensions in
the uniformly distributed sequence to construct one NIG-dimension. It
87
c by Martin Groth. All rights reserved.
Chapter 3. Simulation in Financial mathematics
comes as no surprise that the method now requires considerably longer
time, regarding that we need much more work to evaluate the option in
each qMC step. As we can see in Table 3.7 the time for the simulation is
now around a second, if we do not iterate until the maximal number of
iterations. This terminal condition is reached in a few more cases now,
which we believe is because the evaluation of the option is much more
complex.
Finally we would like to try out what happens in the case where we
have quoted option prices with only two decimals precision. In reality
this is the situation we would find if we used real data as the basis for
our root finding algorithm. We do this by lowering the precision in the
Newton’s method to be of order 5∗10−3 . The results in Table 3.7 show that
the simulation then takes slightly shorter time if we lower the precision,
and we note that none of the simulations make the algorithm reach the
maximal number of iterations. The precision in the estimates are the same
in many cases, and overall not significantly worse than previous results.
Clearly, to have prices quoted with many decimals is not crucial for the
result. The error in the Monte Carlo or quasi-Monte Carlo evaluations is
probably much more influential than the error in the terminal condition
of the Newton’s method.
For the estimation of Value-at-Risk our combination of the root finding
Newton’s method and function evaluation with quasi-Monte Carlo was
not a considerable improvement to the traditional sorting approach. The
method did on the other hand perform well for the parameter estimation
tests. The inherent error in the function evaluation accounts for the main
part of the difference between the estimated and the true parameter. Still,
the implementations could be amended in different ways, such as to include
ways to increase the number of points used.
88
c by Martin Groth. All rights reserved.
3.3. Root finding using quasi-Monte Carlo and Newton’s method
δ
0.001
0.002
0.003
0.004
0.005
0.006
0.007
0.008
0.009
0.010
0.011
0.012
0.013
0.014
0.015
0.016
0.017
0.018
0.019
0.020
δ̂
0.00098
0.00198
0.00301
0.00397
0.00492
0.00593
0.00691
0.00787
0.00890
0.00986
0.01089
0.01194
0.01293
0.01378
0.01482
0.01564
0.01668
0.01771
0.01889
0.01983
Time
1.41909
1.42920
3.44083
0.96106
1.07919
1.07432
0.96277
3.46073
0.96268
1.10093
1.18727
0.88143
1.21701
0.93266
4.64122
0.98624
1.00544
0.96827
0.91976
3.48384
δ̄
0.00098
0.00197
0.00300
0.00397
0.00492
0.00592
0.00691
0.00787
0.00890
0.00980
0.01089
0.01194
0.01292
0.01379
0.01475
0.01564
0.01668
0.01770
0.01889
0.01984
Time
1.08032
1.08491
1.08687
0.97535
0.97139
0.86727
0.86690
0.85736
0.86405
0.63186
0.74758
0.74309
0.74683
0.75018
0.74524
0.85670
0.85645
0.85376
0.86557
0.87636
Table 3.7: Simulated δ with a combination of Newton’s
method and quasi-Monte Carlo simulations for an Asian
option over ten days. δ̂ is the estimate with precision
10−5 in the Newton’s method while δ̄ is the estimate
when we have a precision of order 5 × 10−3 .
89
c by Martin Groth. All rights reserved.
Chapter 3. Simulation in Financial mathematics
3.4
Calculating Greeks in a jump-diffusion market
This section investigates an approach to Monte Carlo simulations of price
sensitivities in a jump-diffusion market. The research on jump-diffusion
markets and Malliavin calculus for Lévy processes has developed rapidly
the last years. In this section we follow up an idea by León et al. [57] and
combine it with an approach to split expectation in order to differentiate
in the directions of the involved processes. This is joint work together
with Roger Pettersson4 .
3.4.1
Background
In an article León et al. [57] the authors develop a Malliavin calculus and
derive hedging strategies for a market driven by simple Lévy processes. A
simple Lévy process is a linear combination of a Brownian motion and n
independent Poisson processes with constant jump sizes and intensity λj
respectively, i.e.
Xt = σWt + α1 N1 (t) + · · · + αn Nn (t),
t ≥ 0.
(3.14)
León et al. prove that such a process can approximate a Lévy process
consisting of a Brownian motion and a compound Poisson process with
i.i.d. jump sizes. Considering a simple Lévy process it is possible to
interpret the derivatives in the directions W, N1 , . . . , Nn in the classical
Malliavin sense, from the following proposition
Proposition 3.1. Consider a simple Lévy process
Xt = σWt + α1 N1 (t) + · · · + αk Nn (t),
t ≥ 0.
(a) Let F = f (Z, Z ) ∈ L2 (Ω), where Z only depends on the Brownian motion W and Z only depends on the Poisson processes N1 , . . . , Nn .
Assume that f (x, y) is a continuously differentiable function with bounded
partial derivatives in the variable x and that Z ∈ D(0) . Then F ∈ D(0)
and
∂f
(Z, Z )D(0) Z.
D(0) F =
∂x
4
The authors are grateful to Fred Espen Benth for useful suggestions and comments.
90
c by Martin Groth. All rights reserved.
3.4. Calculating Greeks in a jump-diffusion market
(b) Let F ∈ D(j) for some j ∈ {1, . . . , n}. Consider
element
a generic
k . Then
[0,
T
]
ω = (ω0 , . . . , ωn ) ∈ Ω = ΩW × ΩN1 × · · · × ΩNn , ωj ∈ ∞
k=0
(j)
Dt F (ω) = F (ω0 , . . . , ωj−1 , ωj + δt , ωj+1 , · · · , ωn ) − F (ω),
where
ωj + δt =
(s1 , . . . , sr , t),
t,
if ωj = (s1 , . . . , sr ),
if ωj = {a}.
Here D (0) is the derivative in the direction Wt , D(j) , j = 1, . . . , n is
the derivative in the direction Nj (t) − λj t defined by iterated integrals,
and [0, T ]0 = a, where a is a distinguished element. By ωj = (s1 , . . . , sr , t)
means heuristically that we to the previous events at times s1 , . . . , sr add
an extra event at time t. If ωj = {a} means no event has happened up to
time t. It is worth to notice that the derivative operator for the Poisson
processes differs from the one used by El-Khatib and Privault [31]. León
et al. use this to compute the derivative in the direction W for a European
call option by rules from the Brownian motion Malliavin theory.
3.4.2
Directional derivatives and approximations to Lévy
processes
The idea for our investigation is to use Proposition 3.1, where we consider
the factor which does not depend on the direction in which we differentiate to act as a constant. We can therefore use directional derivatives and
let the resulting expression be the Greeks. Since the Poisson difference
operator considered by León et al. does not allow an integration-by-parts
formula we will only consider the derivative in the Brownian motion direction.
Assuming that we can use Equation (2.20)-(2.22) and, for example,
consider the Greek Delta (∆), the sensitivity with respect to the initial
value of the underlying asset, we have that
∂
E[f (Xt )] = E[f (Xt )δ(u)]
∂X0
where δ(u) is the Skorokhod integral and u has the form as in (2.23) with
θ = X0 . Following an idea by Jensen [49] we can split the expectation in
91
c by Martin Groth. All rights reserved.
Chapter 3. Simulation in Financial mathematics
two different parts. If the underlying asset obeys the process
dSt
= µ dt + σ dWt +
αj ( dNj (t) − λj dt),
St
n
t > 0,
(3.15)
j=1
the solution can be written as
St = StW StN ,
where
1
StW = e(µ− 2 σ
2 )t+σW
t−
Pn
j=1
αj λj t
, StN =
n
(1 + αj )Nj (t) .
j=1
With this it follows that we can split the expectation as
Q
W N
EQ [f (St )] = EQ
W EN [f (St St )],
where EQ
N denotes expectation with respect to the Poisson process and
Q
EW denotes expectation with respect to the Brownian motion. In the line
of thought from León et al. and Jensen [49] we consider the terms involving the Poisson process as constants when taking the inner expectation
EQ
W . We can then use the Brownian motion Malliavin integration-by-parts
theory.
When applying the integration-by-parts formula we need to decide
on the choice of weight process ht which occurs in Equation (2.23). If
we let ht = St for the remaining part and consider an Asian option we
get
for the weighted expectations. Denoting M =
T
T convenient expressions
0 St dt and Qj = 0 St dNj we get the following representation for ∆ in
a jump-diffusion market
+
n
2
ST − S0 − nj=1 αj Qj
2e−rT M
σ
.
−K
−r+
∆= 2 E
αj λj +
σ x
T
M
2
j=1
The proof is merely a modification of the corresponding proof in the pure
Black-Scholes market, see Fournié et al. [35] and Larsson [55]. The latter
also derives similar expressions for the Greek Gamma (Γ) in the BlackScholes market.
92
c by Martin Groth. All rights reserved.
3.4. Calculating Greeks in a jump-diffusion market
One motivation to study processes of the type (3.14) is that we know
that some Lévy processes can be approximated by simple Lévy processes.
If we know how to simulate option sensitivities for simple Lévy processes
we can also simulate sensitivities for the approximations. We know from
Rydberg [81] that the normal inverse Gaussian Lévy process, which is
a pure jump process, can be approximated by a linear combination of
a drift term, a Brownian motion and some Poisson processes. Actually,
any Lévy process with characteristic triplet (γ, σ 2 , ν) can be approximated
this way. To begin with, the jump process is approximated by a drift term
and Poisson processes with intensity and jump heights distributed such
that they cover the original measure. However, the behaviour of the Lévy
process is dominated by the small jumps which are not represented in the
pure jump approximation. To cover the small jumps we have to add a
Brownian motion term.
Following Rydberg, we split the real line with a section around zero
removed, Λn = R\] − n ; n [ into 2n disjoint intervals. The jump measure
ν is discretised and we let λj and cj , j = 1, . . . , n be the jump intensity
and jump heights corresponding to the discretisation ν (n) . Let Nj (t) be a
Poisson process with intensity λj = ν((aj ; aj+1 )) such that
n
Nj (t)
j=−n,j
=0
is a Poisson process with intensity
n
λj = ν(Λn ).
j=−n,i
=0
The approximation to the pure jump process is then
(n)
X̃t
= γt +
n
cj (Nj (t) − tλj )
j=−n,j
=0
and this converges weakly to the true process as n → ∞ if the discretisation of the measure converges to the Lévy measure.
We know that the small jumps dominate the behaviour of the process
and hence, this approximation is not reasonable. The small jumps thrown
93
c by Martin Groth. All rights reserved.
Chapter 3. Simulation in Financial mathematics
away in the interval [−n ; n ] around zero can be represented by Wt , a
standard Wiener process with volatility σ given by
σn2
n
=
y 2 ν(dy).
−n
Since the NIG Lévy process is a pure jump process we know that σn2 → 0
as n goes to infinity. Now we have all the parts which enables us to
approximate a NIG Lévy process Xt by
(n)
Xt
n
= γt +
(i)
ci (Ni − tλi ) + σn Wt .
(3.16)
i=−n,i
=0
The convergence of the characteristic triplet will imply weak convergence
of the approximation.
If the discretisation ν (n) is proportional to a Dirac measure on ]ai ; ai+1 ]
then the jump sizes are deterministic on the interval. The approximation
is then similar to the complete market approach studied by Jensen [49].
We choose the discretisation in this manner which leads to the equation
ai+1
ai
y 2 ν(dy) = c2i λi .
We solve the equation for ci , letting this be the jump size corresponding
to the interval ]ai ; ai+1 ]. Accordingly, the intensity will be given by λi =
ν((ai ; ai+1 )). For the NIG Lévy process we know that
ν(dy) =
δα
exp(βy)K1 (α|y|) dy
π|y|
where K1 is the modified Bessel function of third order and index 1 and
γ in (3.16) is
2δα
γ=
π
1
sinh(βx)K1 (αx) dx.
0
94
c by Martin Groth. All rights reserved.
3.4. Calculating Greeks in a jump-diffusion market
3.4.3
Numerical results
To test if we could find any numerical verification for this approach we
implemented the method in a series of experiments. The jump heights
and the intensities of the different Poisson processes are generated by
a method influenced by Schoutens [82]. We set an overall intensity and
distribute the jump heights {αi } equally spaced between a largest negative
and a largest positive jump. The intensities {λi } for each Poisson process
are then set to the corresponding value from an appropriate distribution,
here a Gaussian distribution. For comparison, we use a finite difference
approach implementing the Euler scheme proposed by Glasserman and
Merener [38]. We superimpose the exponentially distributed jump times
on to a deterministic grid of time points. At a jump time t we first
calculate the Brownian motion part up to S(t− ) and then let the jump be
S(t) − S(t− ).
As a variance reduction technique Fournié et al. [35] propose to localise
the computation around the point where the derivative of the payoff function is discontinuous. The idea is that, considering a European call option,
where f (ST )δ(u) = (ST − K)+ WT /xσT might have very large variance,
we could introduce a localising function which is zero outside an interval
around K. The payoff function splits in two parts, one which is smooth
and which we differentiate, and one which contains the singularity but
is localised around it. Letting f (XT ) = f (XT ) − f (XT ) + f (XT ) and
Θ = f (XT ) − f (XT ), where f (x) is a smooth approximation of f (x), we
see that
∂
(E[f (XT )] + E[Θ (XT )])
∂X0
∂XT
+ E[Θ (XT )π]
= E f (XT )
∂X0
∂
E[f (XT )] =
∂X0
where π is the Malliavin weight we get from applying the Malliavin integration-by-parts. As showed in Fournié et al. [35] this gives a significant
improvement in the efficiency of the Monte Carlo simulations. We implement this and use the localising functions suggested by Fournié et al.
Our first test is with a European call option and the Greeks Delta ∆
and Gamma Γ, the first and second order sensitivity with respect to the
95
c by Martin Groth. All rights reserved.
Chapter 3. Simulation in Financial mathematics
Delta for vanilla call with 10 jumpheigts between -0.3 and 0.3, lambda = 10, jumpvarians 0.1
0.8
Gamma for vanilla call with 10 jumpheights between -0.3 and 0.3, lambda = 01 and jumpvarians 0.1
0.02
Fin. Diff
Loc. Malliavin
Malliavin
0.78
0.76
0.016
0.74
0.014
0.72
0.012
0.7
0.01
0.68
0.008
0.66
0.006
0.64
0.004
0.62
0.002
0.6
0
1000
2000
3000
4000
5000
6000
7000
8000
9000
10000
Fin. Diff
Loc. Malliavin
Malliavin
0.018
0
0
1000
2000
3000
4000
5000
6000
7000
8000
9000
10000
Figure 3.16: ∆ and Γ for a vanilla call option. Variance
for the jumps are 0.1 in both cases.
initial value S0 . We assume that we have the parameter values
S0 = 100, K = 100, r = 0.1, σ = 0.2.
Using only Brownian motion gives results similar to the results found in
Fournié et al. [35] and Larsson [55]. Including the Poisson jump-term and
applying the directional differentiation in the direction of the Brownian
motion we plot the stepwise expected value for ∆ and Γ in Figure 3.16.
We compare the localised and unlocalised Malliavin methods with the traditional finite difference approach. The unlocalised Malliavin simulation
does not perform as well as the other two methods. The reason is that the
stochastic weight adds some randomness to the simulation which worsens
the convergence. For the localised Malliavin simulation we see that this
effect is lower due to the localisation of the singularity. The Malliavin
approach is known to perform better the higher the order of the involved
differentiation is. For Γ we see from Figure 3.16 that the localised Malliavin simulation performs better than the other two methods, as it seems
to converge very fast. Turning to more complicated options we consider
an Asian option and perform the same calculations, see Figure 3.17. It is
clear that the same features extend to the Asian option too.
Above we designed the simple Lévy process with arbitrarily chosen
jump sizes and intensities. We now try the method when using an approx96
c by Martin Groth. All rights reserved.
3.4. Calculating Greeks in a jump-diffusion market
Delta for an Asian call with 10 jumpheights in [-0.3,0.3], lambda=10, jumpvariance 0.05
Gamma for Asian call with 10 jumps in [-0.3, 0.3], lambda = 10 , jumpvariance 0.1
0.6
0.03
Fin. Diff
Loc. Malliavin
Malliavin
Fin. Diff
Loc. Malliavin
Malliavin
0.028
0.026
0.024
0.55
0.022
0.02
0.018
0.5
0.016
0.014
0.012
0.45
0
1000
2000
3000
4000
5000
6000
7000
8000
9000
10000
0.01
0
1000
2000
3000
4000
5000
6000
7000
8000
9000
10000
Figure 3.17: Simulation of ∆ (left) with jump variance
0.05 and Γ (right) with the jump variance equal to 0.1.
imation to a normal inverse Gaussian Lévy process. We divide the real
line so that we get ten different jumps and a Brownian motion. Without
loss of generality we assume that µ = 0, β = 0 such that we get a symmetric distribution with mean zero and avoid the drift term in (3.16). We
use α = 25.86, δ = 0.014 and simulate an Asian option over 25 days with
NIG-distributed daily log-returns. In the previous example we see that
the method works well with simple Lévy processes, and the NIG-Lévy approximation is not an exception. The simulations in Figure 3.18 show the
same features as the earlier results. The localised Malliavin method is still
performing much better than the other two, showing much better convergence properties. The method is not to prefer if the Brownian motion
is insignificant compared to the Poisson jumps because of the directional
derivation.
The increasing interest in markets driven by Lévy processes also puts
the spotlight on how to calculate the Greeks for such markets. The method
we propose is one possibility for simple Lévy processes or approximations
by such. The method is reliable if the Brownian motion in the simple
Lévy process is not dominated by the Poisson processes.
97
c by Martin Groth. All rights reserved.
Chapter 3. Simulation in Financial mathematics
Delta for a Asian call with approximated NIG log-returns
0.53
Fin. Diff
Loc. Malliavin
Malliavin
0.525
0.52
0.515
0.51
0.505
0.5
0.495
0.49
0.485
0.48
0
0.5
1
1.5
2
2.5
3
3.5
4
4.5
5
4
x 10
Gamma for an Asian call option with approximated daily NIG log-returns
0.075
Fin. Diff
Loc. Malliavin
Malliavin
0.07
0.065
0.06
0.055
0.05
0
0.5
1
1.5
2
2.5
3
3.5
4
4.5
5
4
x 10
Figure 3.18: Simulation of ∆ (top) and Γ (bottom) with
an approximation to a normal inverse Gaussian Lévy process.
98
c by Martin Groth. All rights reserved.
Bibliography
[1] A. L. Amadori. Differential and integro–differential nonlinear equations of degenerate parabolic type arising in the pricing of derivatives
in incomplete market. PhD thesis, University of Roma I - La Sapienza,
2001.
[2] A. L. Amadori, K. H. Karlsen, and C. La Chioma. Nonlinear degenerate integro-partial differential evolution equations related to geometric Lévy processes and applications to backward stochastic differential
equations. Stoch. and Stoch. Reports, 76(2):147–177, 2004.
[3] S. Asmussen and J. Rosiński. Approximation of small jumps of Lévy
processes with a view towards simulation. J. Appl. Prob., 38:482–493,
2001.
[4] A. C. Atkinson. The simulation of generalized inverse gaussian and
hyperbolic random variables. SIAM J. on Scientific and Statistical
Computing, 3(4):502–515, 1982.
[5] G. Bakshi and Z. Chen. An alternative valuation model for contingent
claims. J. Financial Economics, 44:123–165, 1997.
[6] G. Barles. Convergence of numerical schemes for degenerate parabolic
equations arising in finance theory. In L. Rogers and D. Talay, editors, Numerical Methods in Finance. Cambridge University Press,
Cambridge, 1997.
[7] G. Barles, C. Daher, and M. Romano. Convergence of numerical
schemes for parabolic equations arising in finance theory. Math. Models and Methods in Appl. Sciences, 5(1):125–143, 1995.
[8] G. Barles and P. Souganidis. Convergence of approximation schemes
for fully nonlinear second order equations. Asymptotic Analysis,
4:271–283, 1991.
99
c by Martin Groth. All rights reserved.
Bibliography
[9] O. E. Barndorff-Nielsen. Exponentially decreasing distributions for
the logarithm of particle size. Proc. the Royal society London A,
353:401–419, 1977.
[10] O. E. Barndorff-Nielsen. Processes of normal inverse gaussian type.
Finance and Stochastics, 2:41–68, 1998.
[11] O. E. Barndorff-Nielsen and N. Shepard. Modelling by Lévy processes
for Financial Econometrics. In O. E. Barndorff-Nielsen, T. Mikosch,
and S. I. Resnick, editors, Lévy processes, Theory and Applications,
pages 283–318. Birkhäuser, Boston, 2001.
[12] O. E. Barndorff-Nielsen and N. Shepard. Non-Gaussian OrnsteinUhlenbeck-based models and some of their uses in financial economics. J. the Royal Statistical Society, 63:167–241, 2001.
[13] D. A. Bates. Jumps and Stochastic volatility: Exchange rate processes implicit in Deutsche mark options. The Review of Financial
Studies, 9(1):69–107, 1996.
[14] F. E. Benth. An Introduction to Mathematical Finance. SpringerVerlag, Berlin, 2004.
[15] F. E. Benth and T. Meyer-Brandis. Indifferent pricing and the minimal entropy martingale measure in a stochastic volatility model with
jumps. Preprint series in Pure Math. University of Oslo, 3, 2004.
[16] J. Bertoin. Lévy Processes. Cambridge University Press, Cambridge,
1998.
[17] K. Bichteler, J.-B. Gravereaux, and J. Jacod. Malliavin calculus for
processes with jumps. Gordon and Breach, New York, 1987.
[18] T. Björk. Arbitrage Theory in Continuous Time. Oxford University
Press, Oxford, 1998.
[19] F. Black and M. Scholes. The pricing of of options and corporate
liabilities. J. Political Economics, 81:637–659, 1973.
100
c by Martin Groth. All rights reserved.
Bibliography
[20] P. Boyle, M. Broadie, and P. Glasserman. Monte Carlo methods for
security pricing. J. Economics Dynamics and Control, 21:1267–1321,
1997.
[21] P. P. Boyle. Options: A Monte Carlo approach. J. Financial Economics, 4:323–338, 1977.
[22] M. Broadie and P. Glasserman. Estimating security price derivatives
by simulation. Management Science, 42:269–285, 1996.
[23] P. Carr and D. B. Madan. Option valuation using the Fast Fourier
transform. J. Computational Finance, 2:61–73, 1998.
[24] R.-R. Chen and L. Scott. Pricing interest rate options in a twofactor Cox-Ingersoll-Ross model of the term structure. The Review
of Financial Studies, 5(4):613–636, 1992.
[25] F. Delbaen and W. Schachermeyer. A general version of the fundamental theorem of asset pricing. Mathematishe Annalen, 300:463–
520, 1994.
[26] F. Delbaen and W. Schachermeyer. The fundamental theorem for
unbounded processes. Mathematishe Annalen, 312:215–250, 1998.
[27] G. Di Nunno, T. Meyer-Brandis, B. Øksendal, and F. Proske. Malliavin calculus for Lévy processes. Preprint series in Pure Math. University of Oslo, 16, 2003.
[28] D. Duffie. Dynamic asset pricing theory. Princeton university press,
Princeton, New Jersey, 2001.
[29] E. Eberlein and U. Keller. Hyperbolic distributions in Finance.
Bernoulli, 1(3):281–299, 1995.
[30] E. Eberlein and S. Raible. Term structure models driven by general
Lévy processes. Math. Finance, 9(1):31–53, 1999.
[31] Y. El-Khatib and N. Privault. Computations of greeks in a market with jumps via the Malliavin calculus. Finance and Stochastics,
8:161–179, 2004.
101
c by Martin Groth. All rights reserved.
Bibliography
[32] H. Faure. Discrépence de suites associée à un systéme de numèration
(en dimension s). Acta Arithmetica, 43:337–351, 1982.
[33] G. S. Fishman. Monte Carlo; Concepts, Algorithms and Applications.
Springer-Verlag, New York, 1996.
[34] E. Fournié, J.-M. Lasry, J. Lebuchoux, and P.-L. Lions. Applications
of Malliavin calculus to Monte Carlo methods in Finance ii. Finance
and Stochastics, 5:201–236, 2001.
[35] E. Fournié, J.-M. Lasry, J. Lebuchoux, P.-L. Lions, and N. Touzi. Applications of malliavin calculus to Monte Carlo methods in Finance.
Finance and Stochastics, 3:391–412, 1999.
[36] B. L. Fox. Algorithm 647: Implementation and relative efficiency
of quasi-random sequence generators. ACM Transaction on Math.
Software, 12:362–376, 1986.
[37] P. Glasserman. Monte Carlo Methods in Financial Engineering.
Springer-Verlag, New York, 2004.
[38] P. Glasserman and N. Merener. Numerical solution of jump-diffusion
LIBOR market models. Finance and Stochastics, 3:1–27, 2003.
[39] S. Gudonov. Finite difference methods for numerical computations of
discontinuous solutions of the equations of fluid dynamics. Matematiceskij Sbornik, 47:271–306, 1959.
[40] J. Halton. On the efficiency of certain quasi-random sequences of
points in evaluating multi-dimensional integrals. Numerische Mathematik, 2:84–90, 1960.
[41] J. M. Harrison and D. M. Kreps. Martingales and arbitrage in multiperiod securities markets. J. Economical Theory, 20:381–408, 1979.
[42] J. M. Harrison and S. R. Pliska. Martingales and stochastic integrals in the theory of continuous trading. Stoch. processes and their
Applications, 11:215–260, 1981.
102
c by Martin Groth. All rights reserved.
Bibliography
[43] S. L. Heston. A closed-form solution for options with stochastic
volatility, with applications to bond and currency options. Review
of Financial Studies, 6(2):327–343, 1993.
[44] E. Hlawka and R. Mück. A transformation of equidistributed sequences. In Applications of number theory to numerical analysis,
pages 371–388. Academic Press, 1972.
[45] J. C. Hull and A. White. The pricing of options on assets with
stochastic volatility. J. Finance, 42:281–300, 1987.
[46] J. C. Hull and A. White. An analysis of the bias in option pricing
caused by a stochastic volatility. Advances in Futures and Options
research, 3:29–61, 1988.
[47] P. Jäckel. Monte Carlo methods in Finance. John Wiley and Sons,
Chichester, UK, 2002.
[48] E. R. Jakobsen and K. H. Karlsen. A ’maximum principle for semicontinuous functions’ applicable to integro-partial differential equations. To Appear in: NoDEA : Nonlinear Differential Equations and
Applications, 2004.
[49] B. Jensen. Option pricing in a jump-diffusion model with random
jump amplitude:a complete market approach. CAF Working paper
series, 42, 1999.
[50] M. P. Johansson. Malliavin Calculus for Lévy Processes with Applications to Finance. PhD thesis, Imperial College London, 2004.
[51] C. Joy, P. P. Boyle, and K. S. Tan. Quasi-Monte Carlo methods in
numerical finance. Management Science, 42(6):926–939, 1996.
[52] R. Kainhofer. Quasi-Monte Carlo Algorithms with Applications in
Numerical Analysis and Finance. PhD thesis, Technischen Universität Graz, 2003.
[53] A. Kohatsu-Higa and M. Montero. Malliavin calculus in finance. In
S. T. Rachev and G. A. Anastassiou, editors, Handbook of Computa103
c by Martin Groth. All rights reserved.
Bibliography
tional and Numerical methods in Finance, pages 111–174. SpringerVerlag, Berlin, 2004.
[54] D. Kröner. Numerical schemes for conservation laws. John Wiley &
Sons and B.G. Teubner Publisher, Chiester, 1997.
[55] K. Larsson. Monte Carlo simulations of price sensitivities for Asian
options using Malliavin calculus. Master’s thesis, Lunds University,
2003.
[56] J. P. Lehoczky. Simulation methods for option pricing. In M. A.
Dempster and S. R. Pliska, editors, Mathematics of Derivative Securities, pages 528–544. Cambridge University Press, Cambridge, 1997.
[57] J. A. León, J. L. Solé, F. Utzet, and J. Vives. On Lévy processes,
Malliavin calculus and market models with jumps. Finance and
Stochastics, 6:197–225, 2002.
[58] A. L. Lewis. Option valuation under stochastic volatility. Finance
Press, Newport Beach, California, 2000.
[59] A. L. Lewis. A simple option formula for general jump-diffusion and
other exponential Lévy processes. Envision Financial Systems, 2001.
[60] B. B. Mandelbrot. Fractals and Scaling in Finance; Discontinuity,
Concentration, Risk. Springer-Verlag, New York, 1997.
[61] R. C. Merton. Theory of rational option pricing. Bell J. Economics
and Management Sciences, 4:141–183, 1973.
[62] R. C. Merton. Option pricing when underlying stock returns are
discontinuous. J. Financial Economics, 3:125–144, 1976.
[63] J. R. Michael, W. R. Schucany, and R. W. Haas. Generating random
variates using transformations with multiple roots. The American
Statistician, 30(2):88–90, 1976.
[64] B. Moro. The Full Monte. Risk Magazine, 8(2):57–59, 1995.
[65] M. Musiela and M. Rutkowski. Martingale methods in financial modelling. Springer-Verlag, Berlin, 1997.
104
c by Martin Groth. All rights reserved.
Bibliography
[66] E. Nicolato and E. Venardos. Option pricing in stochastic volatility
models of the Ornstein-Uhlenbeck type. Math. Finance, 13(4):445–
466, 2003.
[67] H. Niederreiter. Low-discrepancy and low-discrepancy sequences. J.
Number Theory, 30:51–70, 1988.
[68] H. Niederreiter. Random Number Generation and quasi-Monte Carlo
Methods. SIAM, Philadelphia, Pennsylvania, 1992.
[69] D. Nualart. Malliavin Calculus and related topics. Springer-Verlag,
Berlin, 1995.
[70] D. Nualart and W. Schoutens. Chaotic and predictable representations for Lévy processes. Stoch. processes and their Applications,
90(1):109–122, 2000.
[71] D. Nualart and J. Vives. Anticipative calculus for the poisson process based on the Fock space. In Séminaire de Probabilitiés XXIV
1998/99, Lecture Notes in Math. 1426. Springer-Verlag, Berlin, 1990.
[72] A. Papageorgiou. Sufficient conditions for fast quasi-Monte Carlo
convergence. J. Complexity, 19:332–351, 2003.
[73] A. Papageorgiou and S. Paskov. Deterministic simulation for Risk
Management. J. Portfolio Management, 25th anniversary issue:122–
127, 1999.
[74] A. Papageorgiou and J. Traube. Beating Monte Carlo. Risk Magazine, 9(June):63–65, 1996.
[75] S. Paskov. New methodologies for valuing derivatives. In S. Pliska and
M. Dempster, editors, Mathematics of Derivative Securities, pages
545–582. Cambridge University Press, Cambridge, 1997.
[76] S. Paskov and J. Traube. Faster valuation of financial derivatives. J.
Risk Management, 22:113–120, 1995.
[77] W. H. Press, S. A. Teukolsky, W. T. Vetterling, and B. P. Flannery.
Numerical Recipes in C. Cambridge University Press, Cambridge,
1992.
105
c by Martin Groth. All rights reserved.
Bibliography
[78] P. Protter. Stochastic integration and differential equations. SpringerVerlag, New York, 2003.
[79] S. Raible. Lévy Processes in Finance: Theory, Numerics, and Empirical Facts. PhD thesis, Albert-Ludwigs-Universität Frieburg, 2000.
[80] S. Rasmus. Pricing exotic derivatives using Lévy process input. Licentiate Theses, Lund University, 2004.
[81] T. H. Rydberg. The normal inverse Gaussian Lévy process: Simulation and approximation. Communications in Statistics - Stoch.
Models, 13(4):887–910, 1997.
[82] W. Schoutens. Lévy processes in Finance. John Wiley and Sons,
Chichester, UK, 2003.
[83] L. O. Scott. Pricing stock options in a jump-diffusion model with
stochastic volatility and interest rates: Applications of Fourier inversion methods. Math. Finance, 7(4):413–424, 1997.
[84] I. Sobol. The distribubtion of points in a cube and the approximate evaluation of integrals. USSR Computational Math. and Math.
Physics, 7(4):86–112, 1967.
[85] G. Strang. On the construction and comparison of difference schemes.
SIAM J. on Numerical Analysis, 5:506–517, 1968.
[86] J. Thomas. Numerical partial differential equations; Finite difference
methods. Springer-Verlag, New York, 1995.
[87] J. Tilley. Valuing American options in a path simulation model.
Transactions of the Society of Actuaries, 43:83–104, 1993.
[88] B. Tuffin. Simulation accélérée par les méthodes de Monte Carlo et
Quasi-Monte Carlo: théorie et applications. PhD thesis, Université
de Rennes, 1997.
[89] P. Wilmott, J. Dewynne, and S. Howison. Option pricing, Mathematical models and computation. Oxford Financial Press, Oxford,
1993.
106
c by Martin Groth. All rights reserved.
c by Martin Groth. All rights reserved.
Växjö University
School of Mathematics and Systems Engineering
issn -
isrn vxu-msi-ma-r----se
c by Martin Groth. All rights reserved.