CHOICE UNDER UNCERTAINTY ECON 3210/4210 Decisions, Markets and Incentives Lecture notes 08.09.04

ECON 3210/4210 Decisions, Markets and Incentives
Lecture notes 08.09.04
Nils-Henrik von der Fehr
CHOICE UNDER UNCERTAINTY
Introduction
The theory
framework describing relation between acts and outcomes
behavioural assumptions (preferences)
Modelling uncertainty
risk vs uncertainty and ignorance
Expected utility maximisation
Applications
Critique
The Allais’ Paradox
A decision-making framework
Individual decision making under uncertainty may be characterized as:
choosing one act from a given set of possible acts,
given a set of potential states , one and only one of which will occur.
Everything that can affect the outcome and about which there is uncertainty is part of the state. When the act ( a i
) is chosen and the state ( s j
) become known, the outcome ( O i,j
) shall follow, mechanically and with certainty:
Act a
1
... a i
... a m s
1
...
State s j
... s n
O
1,1
O
1, j
O
1, n
O i ,1
O i,j
O i,n
O m ,1
O m,j
O m,n
Note: a finite number of possible acts and a finite number of potential states
(as opposed to a continuum of acts and/or states).
Everything the decision maker cares about, shall be a part of the outcome.
That is, if certain acts or states in themselves are valued positively or negatively, the relevant aspects of the act or state shall be incorporated into the outcome; that is, it is assumed that the decision maker has preferences over outcomes only.
Example (bicycle insurance): Value of bicycle L , insurance K at cost
− γ
K .
Act
No insurance
Insurance
0
− γ
K
State
−
L
K
− − γ
K
Degrees of uncertainty
The above set up presupposes that the decision maker knows the set of states.
Three alternative assumptions about degree of uncertainty:
1) The decision maker knows the set of potential states and is able to assign a precise probability to each potential state.
2) The decision maker knows the set of potential states, but nothing more.
3) The decision maker does not know the set of potential states.
The first alternative is sometimes referred to as ‘risk’, the second may be denoted ‘uncertainty’ and the third ‘complete ignorance’. We ignore Case 3), but briefly discuss Case 2) before concentrating on Case 1).
2
Uncertainty: only the set of states is known
In standard microeconomic theory, this case is usually not discussed. In other professions, such as philosophy, it has received more attention.
When only the set of states is known, it does not make sense to put more weight on the outcomes of one state than those of another.
It is, however, possible to put greater weight on outcomes that are particularly good or bad. The following decision rule is often recommended:
For each possible act, that is, for each line in the table above, find the worst outcome.
Judge the act as if this outcome will occur and choose the act that, on this basis, is the best one.
This is often called the maximin-rule . In order to apply the rule, the decision maker must be able to rank outcomes; that is, ordinal preferences over outcomes must exist.
Example cont. (bicycle insurance): The worst outcome is
−
L with no insurance and K
− − γ
K if K
− <
0 (incomplete insurance) or
− γ
K if
K
− >
0 (complete insurance) with insurance. Assuming that min
{
− γ
,
− − γ
K
}
, the agent will choose to insure.
Note:
The maximin-rule implicitly assumes a strong aversion to loss, in the sense that the agent only cares about worst outcomes.
Under the assumption of uncertainty, agents have no information whatsoever about the likelihood of various states.
Risk: states have known probabilities
Case 1) above amounts to postulating the existence of numbers p
1
, p
2
, ..., p j
,
..., p n
, where p j
≥
0 for all j and p
1
+ p
2
+ ... + p j
+ ... + p n
= 1. Here p j
is the probability that state s j
will occur:
objectively given (cf. dice example), or
based on experience (observed frequencies), or
subjective judgment (that may differ between persons).
When probabilities have been introduced, an act can be identified with a lottery over outcomes:
3
the act a i
will lead to the outcome O i ,1
with probability p
1
, O i ,2
with probability p
2
, ..., O i,j
with probability p j
, ... and O i,n
with probability p n
such a lottery is usually called a prospect .
Outcomes can, in principle, be very complex objects. For the subsequent discussion it does not really matter what the outcomes are; however, for simplicity, attention is restricted to cases in which the outcome is associated with an amount of money.
Under these assumptions, an act may be identified with a (finite) list of possible amounts of money, with a probability assigned to each amount:
A
=
{
1
, ;
2
,
2
;...; p x n
}
The decision maker receives the amount x j
with probability p j
for j = 1, 2, ... n .
It is assumed that p j
> 0 for all j (i.e. we ignore ‘probability zero events’) and p
1
+ p
2
+ ... + p j
+ ... + p n
= 1.
Example cont. (bicycle insurance): Assume that the probability that the bicycle is stolen and lost is p . The the two prospects associated with insurance ( I ) and no insurance ( N ) are
I
= {
,
− − γ
K ;1
− − γ
K
}
N
= { p L ;1
− p ,0
}
Expected utility
The decision maker is assumed to have preferences over monetary prospects, that is, objects of the form A .
Usually, more stringent conditions are imposed on preferences than those normally used in standard consumer theory under certainty.
1. The process producing the probabilities shall be irrelevant. Let A be the prospect given above and let B be another prospect:
A
=
{
1
, ;
2
,
2
;...; ,
B
=
{
1
, ;
2
,
2
;...; , n n
}
}
(note that, although probabilities may differ, outcomes are the same in both prospects). Let
λ
be a number satisfying 0
≤ λ ≤
1 and consider the prospect
C
=
{ λ
A
− λ
, B
}
.
4
First, the lot shall be drawn between A and B , with probabilities
λ
og 1-
λ
, respectively. Then one conducts the lottery specified by either A or B . All in all, the amount x j
is chosen with probability
λ p j
+ (1-
λ
) q j
, for all j = 1, 2, ... n .
The assumption states that it shall make no difference if one conducts a direct lottery with these probabilities, rather than going through the two-stage lottery involving A and B . That is, the agent is indifferent between the two-stage lottery described above and the direct lottery
D
=
{
λ p
1
[ λ ] λ p n
[ λ ] n
, n
}
.
Example cont. (bicycle insurance): Assume that the probability that the bicycle is stolen is
λ
. If the bicycle is stolen, the police investigates and returns the bicycle with probability 1
− π
. It is as if the decision maker is facing a series of lotteries, where the first involves whether or not the bicycle is stolen and the second whether or not the bicycle is returned.
Consider first the case in which the decision maker has taken out insurance.
Let S denote the prospect facing the agent after the bicycle has been stolen, with the two possible outcomes “bicycle is lost” (probability returned” (probability 1
− π
), respectively:
π
) and “bicycle is
S
= { π
, K
− − γ
K ;1
π γ
K
}
Correspondingly, the prospect facing the agent in the event the bicycle is not stolen is
NS
=
{
0, K
− − γ
K ;1,
− γ
K
}
The initial prospect, over whether or not the bicycle is stolen, is
I
= { λ
S
− λ
, NS
}
Instead of considering the above two-stage set up, the agent may just as well consider the reduced-form prospect
I
=
{
,
− − γ
K ;1
− − γ
K
} where p
= λπ [ λ ]
0
λπ
is the probability that the bicycle is lost (i.e. stolen and not returned) and 1
λ [
1
− π ] [ λ ]
1 1
λπ
is the probability that it is not (i.e. either stolen but returned, or not stolen in the first place).
Similarly, in the case that no insurance is taken out, instead of considering the combined prospects of whether or not the bicycle is stolen and whether or not the bicycle is returned, the decision maker may just as well consider the prospect of whether or not the bicycle is lost:
5
N
= { p L ;1
− p ,0
}
.
2. Moreover, one usually introduces a so-called independence axiom . Let A ,
B and C be prospects, and assume that the decision maker prefers A to B . La
λ
be a number satisfying 0 <
λ ≤
1. Then the axiom requires that the decision maker prefers
D
= { λ
A
− λ
, C
}
. to
E
= { λ
B
− λ
, C
}
.
Example cont. (bicycle insurance): Let C be the outcome (degenerate prospect) in which the decision maker experience a fatal accident, which happens with probability 1
− ρ
. Consider the combined events
I
=
=
{ ρ
{ ρ
I
ρ
N
ρ
}
}
The independence axiom implies that I is preferred to i
if and only if I is preferred to N . In other words, the risk of a fatal accident does not affect the decision about whether or not insure against theft.
When these assumptions (together with some others that are not controversial) are satisfied, the so-called expected utility theorem holds. It states that there exists a function u , known as the utility function , defined over amounts of money, with the property that the decision maker ranks prospects on the basis of their expected utility,
( )
= p u x
1
( ) + p u x
2
( ) p u x n
( ) and the prospect with the highest expected utility is chosen.
It is not assumed that the function u exists as a mental reality for the decision maker. It is only claimed that, given the conditions imposed on the preferences, the decision maker will act as if expected utility is maximized.
Note that the expected utility property is invariant to linear transformations; that is, for any utility function
( ) ( )
, we have
6
( )
= i n ∑
=
1
= i n ∑
=
1 p i
⎣
⎡ ( )
⎦
⎤
= n n a
∑ + b
∑ i
=
1 p i
=
1 i
( )
In other words; any linear transformation of a utility function represents the same underlying preferences.
Attitudes towards risk
We say that a decision maker is
risk averse if E
( ( ) )
< u
(
E
( ) )
risk loving if E
( ( ) )
> u
(
E
( ) )
risk neutral if E
( ( ) )
= u
(
E
( ) )
The attitude towards risk may be associated with the shape of the utility function: the decision maker is
risk averse if u is concave
risk loving if u is convex
risk neutral if u is linear
The results follow from application of Jensen’s inequality: If g is a concave and differentiable function, then
1) E
( )
≤ g
(
E
( ) )
2) If g is strictly concave and Var
( )
>
0 then the inequality in 1) is strict.
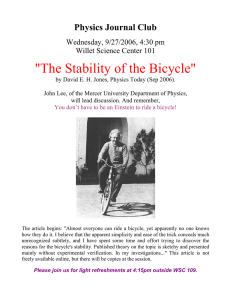
Sketch of proof. Let tangent to g at x
= µ
( )
= g
( )
+ g
′ ( )
. Since g is concave,
[ x
− µ ]
, where
µ =
E
( )
, be the
( ) ≥ ( )
(see figure below)
7
• Figure 1: Tangent to a concave curve
It follows that
E
( )
≤
E
( ( ) )
=
E
( g
( )
+ g
′ ( ) [
X
− µ ] )
=
= g g
(
( )
+ g
′ ( ) ( )
E
( ) )
− µ
⎦
⎤ which completes the argument.
Taylor-approximation to E
( )
at E
( )
:
E
( )
=
E
( u
(
E
( )
+
⎣
⎡ x
−
E ⎦
⎤
) )
≈
=
E
⎛
⎜
⎝ u
(
E
( ) )
+ u
′
(
E
( ) )
⎣
⎡ x
−
E
( )
⎦
⎤ u
(
E
( ) )
+ u
′
(
E
( ) )
⎣
⎡
E
( ) ( )
⎦
⎤
+
+
1 u
′′
2
(
E
( ) )
⎣
⎡ x
−
E
( )
⎦
⎤ 2
1
(
⎣
⎡ x
−
E
2 u
′′
(
E
)
E
⎟
⎞
⎠
⎦
⎤ 2
)
= u
(
E
( ) )
+
1 u
′′
2
(
E
)
Var
( )
From the above we get u
(
E
( ) )
−
E
( ( ) )
≈ −
1 u
′′
2
(
E
)
Var
( )
8
In other words: the deviation between expected utility and the utility of the expected outcome depends on
the degree of risk, or Var
( )
, and
the degree of risk aversion, or u
′′
(
E
( ) )
.
To adjust for the absolute level of marginal utility (cf the point above about independence of linear transformations), risk aversion is often measure by the
(Arrow-Pratt) coefficient of absolute risk aversion: r
A
= u u
′
′′ (
(
E
E
( )
( )
)
) .
Decreasing absolute risk aversion implies that a more wealthy decision maker requires a lower risk premium, i.e. a smaller difference between expected return and its certainty equivalent.
Alternatively, one may consider the coefficient of relative risk aversion: r
R
= u
′′
(
E u
′
(
( )
E
) x
⋅
( )
E
)
( )
.
Note that the coefficient of relative risk aversion may be interpreted as the elasticity of the marginal utility function with respect to wealth.
The Competitive Firm Under Price Uncertainty
Ref: A. Sandmo, The American Economic Review, 61 (1), 65-73, 1971.
Consider a risk-averse, price-taking firm that maximises expected utility of profits by choosing output: max y
( (
−
( )
− f
) ) where p is the market price – which is stochastic – y is output, c is variable cost and f is fixed cost.
It may be shown that
at optimum marginal cost is less than the expected price, i.e.
′ ( )
<
( )
, so output is less than if there were no uncertainty or the firm was risk neutral;
9
expected price must be larger than average costs, so the firm requires positive expected profit in order to choose a positive output level;
optimal output depends on fixed costs: in particular, if the firm has decreasing absolute risk aversion then output is decreasing in the level of fixed costs.
Diversification
Risk-averse agents may benefit from spreading wealth on different assets.
To illustrate, consider the following example.
There are two assets A and B that result in different payoffs in two, equally likely states. The following table summarises outcomes.
Probability of state 0.5 0.5
Payoff asset A 5 15
Payoff asset B 15 5
Note that each asset has expected payoff equal to 10 (
= × + × and variance equal to 25 (
= [ − ]
2 + [ − ]
2
).
These outcomes may be compared to the (diversified) portfolio with equal shares of both assets. It has the same expected payoff (equal to 10), but variance equal to zero.
More generally:
spreading wealth on different assets may reduce risk (unless payoffs are perfectly correlated) without reducing (expected) payoff;
furthermore, a risk averse agent will be willing to trade off expected gains in order to obtain lower risk.
Insurance
Risk-averse agents may benefit from insuring themselves against unfortunate events.
10
Consider the following example:
an agent has a fixed wealth R ;
with probability p a loss L is inflicted on him/her;
however, the agent may purchase insurance K at costs
γ
K .
The possible outcomes may be summarised as follows:
state 1 (no loss): x
1
= − γ
K with probability 1p
state 2 (loss): x
2
= − γ
K
[ γ ]
K
−
L with probability p
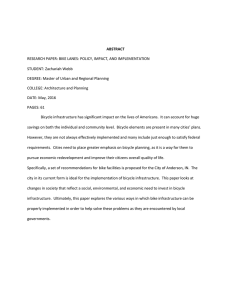
The decision problem is: choose K to maximise
[
1
− ] ( − γ
K
) + ( − γ
K
− +
K
) subject to 0
≤ γ
K
≤
R .
Figure: wealth and utility on axes; outcomes with K
=
0 .
Substituting K
=
1
1
− γ
[ x
2
− +
L
]
in x
1
= − γ
K we have x
1
+
γ
1
− γ x
2
=
1
1
− γ
R
−
γ
1
− γ
L .
The decision maker’s problem may consequently be written max
. .
ρ x
(
1
,
2
)
+ ρ
2 x
2
=
Y where the ‘utility function’ has the form
“(state-dependent) goods” are x
1
and
(
2
) x
2
, “prices” are while “total consumption expenditure” is Y
=
1
1
− γ
R
−
γ
1
−
[ ] ( )
+
( )
,
ρ
1
=
γ
L .
1 and
ρ
2
=
γ
1
− γ
It follows that we may draw on results from standard (full information) consumption theory. In particular, the necessary condition for (an interior) optimum
11
∂
U
∂ x
1
∂
U
∂ x
1
=
ρ
1
ρ
2 may be written
[
1
− ] ( )
( )
2
=
1
−
γ
γ
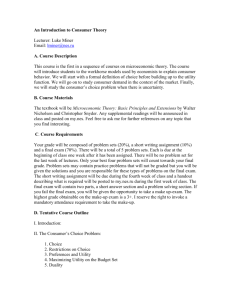
Figure: wealth in each state on axes (note: at the 45° line the slope of the indifference curve equals
−
1
− p p
; the slope of the ‘budget line’ is
−
1
−
γ
γ
).
Profit of from selling the insurance:
Π = γ
K
− pK
No-profit (or ‘fair insurance’) implies
γ = p :
marginal utility of money equal across states, i.e.
′ ( )
= ′ ( )
decision maker chooses to be fully insured, i.e. x
1
= x
2
Figure: wealth in each state on axes (note: tangent at the 45° line).
If
γ > p (i.e. ‘unfair insurance’), the decision maker will no be fully insured, i.e. x
1
> x
2
Figure: wealth in each state on axes (tangent below 45° line)
Risk sharing
Risk averse agents may benefit from exchanging risk.
Examples: stock market, co-operative insurance, financial contracts in electricity markets.
Price volatility and risk exposure: vertical integration
Appealing to risk aversion may provide insights into the operation of markets.
Vertical integration between generators and suppliers (retailers) in the electricity industry may reduce exposure to risk in the wholesale market.
12
Profit of individual company
π = p x
+ py
−
( ) where p
R
= retail price, x = retail supply, y = net wholesale supply, p = wholesale price, c = generation cost ( c
′ > >
) and q = generation output.
We have y
= − x .
Special cases:
x
=
0 : generator
q
=
0 : supplier (retailer)
x q
>
0 : vertically integrated company
q
> x : net seller in wholesale market
q
< x : net buyer in wholesale market
Assume that p is stochastic (there is no other uncertainty).
Substituting y
= − x , expected utility becomes
( (
+ [ − x
] −
( ) ) )
, where the utility function U is increasing and concave ( U
′ >
U
<
).
We take x to be given and q to be a decision variable, set before uncertainty is resolved.
First-order condition for (interior) profit maximum:
′ [ p
− c
′ ] )
=
0 .
Suppose y
= − >
0 . Then
π = p x
+ py
−
( )
is increasing in p and, since U is concave, U
′
is decreasing in p . It follows that
′ [ p
− c
′ ] )
≤ ′
( )
′
[ p
− c
′ ]
)
=
U
′
( )
′
⎣
⎡ ( )
− c
′ ⎤
⎦ , which implies that, at optimum,
13
( ) ≤ ( )
.
That is, net sellers in the wholesale market ( q
> x ) tend to under-produce.
Conversely, when y
= − <
0 , produce.
( ) ≥ ( )
; that is, net buyers over-
Note that an implication of the above results is that marginal costs are not equalised across market participants and hence generation costs are not minimised.
Impact of expected utility from higher level of retail involvement:
( ) dx
=
∂
( )
∂ x
= ′ ( )
⎣
⎡ p R − p ⎦
⎤
)
.
Suppose q
> x and p R = ( )
(perfect arbitrage between wholesale and retail market). Then, by similar argument to the one above,
′
⎣
⎡ p
R − p ⎦
⎤
)
≥ ′
(
π
R
)
⎣
⎡ p
R − p ⎦
⎤
)
=
U
′
(
π
R
)
⎣
⎡ p
R −
( )
⎦
⎤ =
0 .
So a wholesale seller (generator) would want to increase retail involvement.
Conversely, when q
< x ,
′ ( )
⎣
⎡ p R − p ⎦
⎤
)
≤
0 , and so a wholesale buyer would want to decrease retail involvement.
Results
risk aversion creates motive for hedging
generators will want to integrate into supply (and suppliers into generation)
reduced trade in wholesale market
Extensions
retail prices vary with wholesale prices: no hedging motive for vertical integration
long-term contracts: alternative or supplement to vertical integration?
Price volatility and risk exposure: on market-based policy instruments
Ref: Baldursson & von der Fehr, Journal of Environmental Economics and
Management, 48, 682-704, 2004.
14
Observation: less trade in emission permits than might have been expected.
Possible explanation: transaction costs, here risk exposure.
Assume each firm produces one unit of emissions. Emissions may be reduced by
ex ante investment in abatement equipment k (sunk cost) and
ex post cleaning activities a (variable cost).
Note: ex ante and ex post refer to, respectively, before and after uncertainty is resolved.
Ex post given allocated quota q , investment level k and price of quotas p , a firm chooses cleaning activities a so as to minimise
( )
+ p
[
1
− − − q
] where c is cost of cleaning activities and p
[
1
− − − q
]
is cost of net purchase of quotas (negative if firm sells quotas).
First-order condition: c a
( ) = p
For given k , this equation defines optimal abatement, as individual (net) demand for quotas,
∆ q e = ∆ q e a
( ) q = a q
( )
( )
, as well
− − q , as a function of quota price.
Market equilibrium (in the aggregate trade must sum to zero) determines the price of quotas:
∑
;
=
0 i
∆ q i e
( p k i
)
.
Consider now ex ante investment. Assume that uncertainty originates from entry and exit of firms in the quota market place, resulting in an uncertain quota price. A risk-averse firm maximises
E
( u
(
π −
(
, q
)
− p ⎣
⎡
1
− a q − − q
⎤
⎦
) ) where
π
is profits net of cost of cleaning activities.
For comparison: if u is linear, we find c k
( q
, q
)
=
E
( )
.
15
It follows that marginal cost is equalised across technologies (internal efficiency) as well as firms (external efficiency). Note that this implies that, in this case, the initial allocation of quotas does not matter for abatement.
However, if u is concave, we can show that
a firm that is fully covered with quotas (i.e. abatement equipment (i.e. E
( c k
( q , q
) )
<
E
( ) q
=
1 ) under-invests in p ), whereas
a firm that is allocated no quotas (i.e. q
=
0 ) over-invests in abatement equipment (i.e. E
( c k
( q
, q
) )
>
E
( )
).
Note that this implies that initial quota allocation matters for abatement.
Furthermore, if the coefficient of absolute risk aversion is constant, a firm’s investment is decreasing in the amount of quota allocated, i.e. d k q d q
<
0 .
Also, if quotas are distributed so that firms get either full quota or no quota at all (cf. grand-fathering), then trade in quotas is less if firms are risk averse.
Criticism of the theory: Allais’ paradox
The following example has been used as an argument against the independence axiom presented above. It consequently provides an argument against the expected utility theorem.
The table below defines four acts or prospects, A , B , C and D . There are three states, with probabilities given in the top row. The following rows gives outcomes for each act (expressed as amounts of money).
A
B
C
D
0,10 0,01 0,89
5 0 0
1 1 0
5 0 1
1 1 1
The decision maker shall choose between A and B , and between C and D .
If the expected utility theorem holds, A will be preferred to B if and only if C is preferred to D (and similarly for the opposite preferences, and for indifference).
16
This may be seen in two alternative ways. First, without loss of generality, u (0) = 0 and u (5) = 1 may be assumed. It is then easy to see that A has higher expected utility than B if and only if u (1) < 10/11. Exactly the same condition on u (1) is equivalent to C having higher expected utility than D .
Alternatively, the conclusion may be reached by applying the argument for the independence axiom: if the last of the three states is realised, the outcome is the same for A and B , as well as for C and D . Therefore, this state should be irrelevant for the choice between A and B , as well as for the choice between C and D . If the last state is ignored, A = C and B = D . Therefore, A should be preferred to B if and only if C is preferred to D .
Nevertheless, experiments have shown that many people choose A when facing the choice between A and B , but choose D when facing the choice between C and D . This contradicts the argument above.
A possible explanation for this “irrationality” goes as follows: in the choice between A and B , both prospects involve a considerable danger of not winning anything, but in expected monetary value A is a lot better than B . In the choice between C and D , on the other hand, although C has a higher monetary expectation, choosing D implies a certainty of winning something.
It may nevertheless be claimed that choices can only be rational if they are consistent with the expected utility theorem (note that this terminology implies that what many people intuitively find reasonable is characterised as
‘irrational’). However, if the above reasoning for the choices A and D is deemed rational and consistent the arguments in support of the independence axiom cannot be convincing.
There is an extensive discussion of this issue in the literature.
17