A Theory of Policy Expertise ∗ Steven Callander June 11, 2007
advertisement

A Theory of Policy Expertise∗
Steven Callander†
June 11, 2007
Abstract
This paper presents a new theory of policy expertise. In contrast to existing
theories, I define expertise as direct knowledge of the policy process itself. Thus,
expertise represents an understanding of how policies are transformed into outcomes, and does not reduce to the possession of a single piece of information (as
in standard models), resonating more closely with how expertise is commonly understood. To establish the usefulness of the theory, I apply it to the well-studied
problem of delegation and show that it provides a solution to the commitment problem of legislative-bureaucratic policy making. The theory also provides a measure
of issue complexity, and predicts that only complex issues are delegated, consistent
with empirical observation. The theory also opens up many further questions and
applications, several of which are considered here.
∗
For helpful comments I thank Jonathan Bendor, Chuck Cameron, Olivier Compte, Sven Feldman,
Sean Gailmard, Tom Hammond, John Hatfield, Keith Krehbiel, John Patty, and several seminar audiences.
†
Managerial Economics and Decision Sciences, Kellogg School of Management, Northwestern University, Evanston, IL 60208; scal@kellogg.northwestern.edu.
It is by now well understood that expertise plays a central role in policy making. This
fact, first articulated by Max Weber, raises a fundamental question: what does it mean
to be an expert? Over recent decades models of policy have come to rely on a particular
conception of expertise, encapsulated in the now-canonical “cheap-talk” model of Crawford and Sobel (1982). This model, borrowed from economics, provides a parsimonious
and tractable theory of policy formation, and has formed the theoretical foundation for
numerous influential studies of politics, ranging from Gilligan and Krehbiel’s (1987, 1989)
seminal work into committee structure and legislative organization, to the enormous literature on Legislative-Executive branch relations (Bendor, Glazer, and Hammond 2000,
and Huber and Shipan 2006, provide reviews), and even political debate (Austen-Smith
1990).
Although the canonical formulation of the “cheap-talk” model is attractively simple,
it provides a limited conception of expertise. According to this approach, expertise is
equivalent to the possession of a single piece of information. This definition is not only
discordant with expertise as commonly understood, but in the policy process it produces
several peculiar properties. Most notably, it implies that a single statement from an
expert can render an intelligent layperson an expert. For example, according to the
canonical model a patient may acquire complete medical expertise upon hearing a single
diagnosis from a doctor.
Simplifications are necessary, of course, in any theoretical enterprise. Yet those inherent in the canonical model are excessive and I argue that these shortcomings not only
limit our understanding of expertise but, more substantially, cast doubt on the structural
soundness of all research built upon its foundation.
In this paper I propose a new theory of policy expertise, one that is more suited to
the political environment. In contrast to the canonical model, I define expertise over
the policy process directly. In this theory an expert possesses superior knowledge of the
process by which policy instruments are transformed into outcomes. Expertise can be,
therefore, much more than the mere possession of a single piece of information. This
representation is more in accordance with the common understanding of expertise, as
described by Bendor, Taylor, and Van Gaalen (1985):
“... bureaucrats [experts] typically possess special insight into the relation
between programs and consequences.”
The advantages of this approach are several. In particular, the theory provides a measure
of the complexity of expertise, allowing policy issues to be categorized according to the
varying degrees of simplicity and complexity observed in practice.
To demonstrate the power of the new theory, I apply it to the study of policy-making,
taking the legislative-bureaucratic relationship as my leading example. A central tenet of
1
this relationship is that the delegation of authority — although frequent — is not irrevocable as Congress always retains the right to pass overriding legislation. This power creates
a dilemma: if Congress can learn from the expert recommendations of an agency, what
prevents it from using this information toward its own ends? In principle, the canonical
model of policy provides no barrier and Congress’ ability to subvert agency expertise
gives rise to a problem of commitment. Congress’ inability to commit to the delegation of authority implies that agencies cannot protect their expertise from Congressional
oversight, undermining the rationale for agency expertise and delegation more generally.
Moreover, this puts Congress in the position of power, a conclusion in conflict with the
traditional “Weberian” view of policy making.1
The theory of expertise I introduce avoids these difficulties, providing a solution to
the commitment problem. This finding provides a formal explanation for agency power
in the face of de jure legislative authority, thereby reconciling the formal treatment of
policy development with the Weberian perspective.
Central to this finding is the complexity of policy expertise. By offering a richer
conception of expertise, the theory establishes exactly when and how Congress is able
to subvert an agency’s expertise. I prove that only if issues are complex can Congress
productively delegate authority and agencies be induced to develop expertise, a finding
that resonates well with empirical and anecdotal evidence (Ringquist 1995; Epstein and
O’Halloran 1999).
My results contrast with and complement the standard institutional-constraint approach taken in the literature (Weingast and Moran 1983; Epstein and O’Halloran 1994,
1999; etc.). This line of work, in recognition of the natural constraints to action built-in
to political systems, incorporates exogenous constraints — or frictions — into models of
policy making. These frictions restore agency power by restricting Congress’ ability to
override agency actions. To highlight the difference between this approach and the one
proposed here, the model I develop is intentionally frictionless, showing that the power of
bureaucratic agencies I identify is due to the complexity of expertise and not exogenous
constraints.
The difference between the institutional-constraint approach and my expertise-based
model is seen most clearly in what they each imply for the nature of agenda control. As
Bendor et al (1985) observe, agency power derives from an ability to control the policy
making agenda, although this power comes from two sources: official control of the
alternatives that can be offered for consideration, and unofficial control that is wielded
merely through the authority of expertise. Bendor et al refer to these two sources as
1
Weber viewed the agency as powerful, concluding that “Under normal conditions, the power position
of a fully developed bureaucracy is always overtowering. The “political master” finds himself in the
position of the “dilettante” who stands opposite the “expert.”” (Quoted from Gerth and Mills (1958),
page 232).
2
Type 1 and Type 2 agenda control, respectively (see also Weber in Gerth and Mills
1958). The frictions of the institutional-constraint approach induce agenda control that
is closer in spirit to Type 1. In contrast, no such constraints are present in my theory
and any power obtained by the agency is purely of Type 2. A formal explanation for
Type 2 agenda control, such as is provided here, is of interest not just as a counterpoint
to existing results, for as Bendor et al (1985, p. 1042) argue, Type 2 control is itself an
empirically relevant case (see also Miller and Moe 1983):
“A bureau’s influence rests not on it formal authority [Type 1] — its ability
to manipulate the rules — but, as Weber noted, its control of information, its
ability to manipulate either the construction of policy alternatives or information about the consequences of different alternatives [Type 2].”
The theory also offers predictions about the nature of delegation should it occur.
On complex issues an expert agency is fully empowered when delegated to and acts as
if the threat of oversight did not exist, always achieving its own ideal policy outcome.
In contrast to standard models with imperfect oversight, the agency does not shade its
policy proposal toward the legislator’s preference. I also find that the types of agencies
to whom authority is delegated, as well as the conditions under which delegation occurs,
differ from extant models, most notably predicting a failure of the famous ally principle.
The legislative-bureaucratic relationship is but one instance of policy making and the
theory is applicable more broadly. It applies with equal force to informational theories of
legislative organization founded by Gilligan and Krehbiel (1987, 1989), which also employ
the canonical cheap-talk model of expertise and faces a similar problem of commitment
(Diermeier 1995). The theory is also relevant to decision making in the absence of delegation, in static and dynamic environments, and within governments, bureaucracies, and
private firms.2 In fact, it can be applied to any decision making situation in which actions are distinct from outcomes and connected by a “policy” process, including political
debate.
The conception of expertise offered here is informational, and in this sense shares
a lineage with the canonical model. Although this formulation is open to broad interpretation, it does not capture expertise in its full breadth. An alternative perspective
views expertise as an ability (or a strategy) rather than a difference in knowledge (Page
2006, 2007; Hong and Page 2001). Reconciling these different perspectives is difficult
if information-based expertise is limited to a single piece of information. By offering a
richer theory, I provide the generality necessary to complement the work of Page and
others. Integrating these ideas is a natural objective of future work.
2
Aghion and Tirole’s (1997) concept of formal and real authority is reminiscent of the earlier Type I
and II agenda control of Bendor et al. (1987), although their focus is not on the information extraction
problem that is central here.
3
POLICY PROCESSES AND EXPERTISE
Policy outcomes can seldom (if ever) be chosen directly. Rather, policy makers choose
policy instruments (referred to simply as policies) that, once implemented, deliver outcomes, and it is these outcomes that directly motivate political actors. Denote the set
of policy instruments by I and the set of outcomes by O. Policies are transformed into
outcomes by a policy process ψ, such that ψ : I → O. An issue is defined by the set of
possible policy processes, denoted by Ψ where ψ ∈ Ψ.
In this setting a natural definition of an expert — and the one adopted here — is
someone (or some organization) with superior knowledge of ψ; that is, superior knowledge
as to which ψ in Ψ is the true process. Put less formally, one is said to be an expert
if one possesses superior knowledge to the layman about how policies are mapped into
outcomes.
Both laymen and experts possess beliefs about the true mapping ψ, which are denoted by α (.) and φ (.), respectively. These beliefs in turn induce, for a given policy
instrument, beliefs over outcomes; in a slight abuse of notation, let α (o|p) represent the
probability a layman assigns to instrument p ∈ I producing outcome o ∈ O, and φ (o|p)
the corresponding belief of an expert. If the expert possesses complete knowledge of the
policy process then his beliefs φ (.) are degenerate.3
With a conception of expertise in hand, it is now possible to explore both the nature
of expertise and how it affects decision making. Three components of expertise are
prominent. The first two are straightforward and are present in standard models: the
cost and difficulty of attaining expertise, and the informational advantage an expert holds
over a layman (reflected in the tightness of expert beliefs φ versus those of α). The third
component, complexity, is less obvious but equally important to policy making, and is
the focus of much of the analysis here.
Complexity describes the interrelation of different pieces of expert knowledge, measuring how the outcomes of different policies are connected (or correlated). For example,
if one possesses superior knowledge about the current state of social security, this should
translate into superior — but not perfect — knowledge of the likely outcomes from social
security privatization, with the accuracy of this knowledge depending on the complexity
of the issue. In the following sections I provide a formal definition of issue complexity
and use this measure to categorize the different degrees of expertise that are possible.
Extreme Policy Processes
According to the canonical model, policy follows the simple process:
ψ:
3
x = p + θ,
A degenerate distribution assigns all belief to a single outcome (no uncertainty remains).
4
(1)
policy
outcome
x
6θ = 2 θ = 1
θ=0
¡
¡
¡
¡
¡
¡
¡
¡
¡
¡
¡
¡ θ = −1
¡
¡
¡
¡
¡
¡
¡
¡
¡
¡
¡
¡
¡
¡ θ = −2
¡
¡
¡
¡
¡
¡
¡
¡
¡
-p
¡
¡
0
¡
¡
¡
¡
policy
¡
¡
¡
¡
¡
instrument
¡
¡
¡
¡
¡
¡
¡
¡
¡
¡
¡
¡
¡
¡
¡
¡
¡
¡
¡
¡
¡
¡
¡
¡
¡
¡
¡
¡
¡
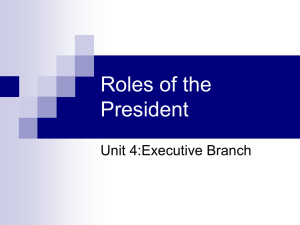
Figure 1: The Canonical Model: ψ (p) : x = p + θ
where x is the outcome, p the policy instrument chosen, and θ is a shock, or state of
the world.4 The central assumption in this model is that expert and laymen alike know
that the policy process (ψ) is linear and additive in components, with the only difference
being that the expert possesses knowledge of θ whereas the layperson does not. Thus,
both players know how policies are mapped into outcomes and the difference between
them reduces to a single piece of information.
Formally, the canonical model restricts the set Ψ of possible mappings to consist
entirely of functions of the form of Equation 1, differing only in the value of θ. Figure 1
depicts the possible policy processes for various realizations of θ.
The key property of this structure is that the potential policy processes do not intersect (all lines have slope one and differ only in the intercept term). This allows the
processes to be easily distinguished from one another such that the revelation of a single
fact exposes the true policy process, rendering a layman an expert. For instance, learning
that ψ (2) = 4 implies with certainty that θ = 2 and that the policy process is described
by x = p + 2. I refer to expertise that satisfies this property as perfectly invertible.5 If
expertise is invertible for every process in an issue — as in the canonical model — I say
4
The original assumptions of Crawford and Sobel (1982) generalize this form in several respects,
although the following criticisms apply to their general structure with equal force.
5
More formally, expertise over a process ψ is invertibile if for each p ∈ P and ψ 0 ∈ Ψ, ψ (p) 6= ψ 0 (p).
Invertibility depends, therefore, on ψ as well as the composition of the set Ψ (this definition allows for
some ψ ∈ Ψ to be invertible and others not). Note that invertibility does not depend on linearity or
monotonicity of the policy process.
5
that the issue itself is invertible.
As is evident, the canonical model represents an extreme and simplistic view of the
policy process. To see the type of issue to which this model can be applied, it is helpful
to consider a simple example. Consider a man who wishes to learn which day of the week
it is (an absentminded professor perhaps) and who consults an expert with knowledge of
the current day. Suppose that the expert does not answer the man’s question directly
but does inform him that tomorrow is Tuesday. Obviously this is not the information
the man seeks. However, the man is nevertheless able to infer from it that the current
day is Monday. He is able to do this as the expert’s information answers a related
question, and the man knows how the answers to these questions are connected. More
specifically, the man knows the process by which days of the week are connected (if he
did not possess even this knowledge the difference between an expert and layman would
be much greater). Consequently, in learning that tomorrow is Tuesday the layman is
instantly updated to expert status with respect to days of the week, knowing not only
the current day but also that in four days it will be Friday.
This example fits the canonical model precisely. In fact, the canonical model only
describes issues that possess expertise of similar simplicity. For instance, for it to apply
it must be that all players agree — laymen and experts alike — on the ordering of policies
and outcomes. That is, experts and laymen both know that a larger instrument p leads
to a larger outcome x, for any realization of θ. In fact, it is required that all players are
aware that an increase in p induces the exact same increase in x, regardless of the state
of the world (e.g., that tomorrow and today are always one day apart).
Not surprisingly, it is rather difficult to imagine real policy issues that satisfy these
extreme conditions. Even for numerate issues such as the minimum wage, knowledge
of the status quo (which corresponds to a point in the mapping) does not educate nonexperts on what to expect from a $1 increase. In practice policy processes are neither
linear nor monotonic, and often are rather chaotic. More importantly, the functional
form of the mapping is itself not clear and expertise is far from invertible. To adequately
capture expertise, therefore, a more general framework is required.
Occupying the opposite extreme to the canonical model is the category of noninvertible policy processes. Non-invertible expertise is so complex that knowledge about
outcomes is unrelated across policy instruments. Therefore, learning one point in the
mapping reveals nothing about other policy instruments (in contrast, for invertible issues it reveals everything). To be sure, learning that ψ (p) = x allows a layman to rule
out any process that does not pass through this point, but this information does not
reduce the set of possible policy processes enough for the layman to learn about other
instruments.
To accommodate this property, both the types of processes allowed and the breadth of
the issue itself (the set Ψ of available processes) must be substantially more general than
6
in the canonical model. Non-invertible processes do not submit to a particular functional
form or even family of functions, and the processes need not be continuous (although
they can be). In fact, from a layman’s perspective, a non-invertible policy process is
essentially a random function, with the outcome from different policy instruments — even
those that are “close” — entirely uncorrelated with one another. If every process in an
issue is non-invertible I say the issue itself is non-invertible.
To see the type of expertise this extreme entails, let us again turn to a simple example
(that approaches the extreme of non-invertibility). Suppose the same man has now
suffered a significant leg wound and consults a doctor. The doctor informs him that
band-aids are an effective treatment for minor abrasions. As before, the expert has
answered a related question, but in this case the information provided is less useful to
the man. He not only is not updated to expert status, but arguably is no better positioned
to choose his optimal treatment.6 Indeed, were the man to suffer a heart attack one could
be sure the doctor’s advice on band-aids would be entirely useless.
The difference between this and the days of the week example is the complexity of
expertise. Medical expertise — as with expertise on all complex issues — is more than
the mere possession of a single piece of information, and does not fit the canonical specification. Non-invertible expertise takes complexity to the extreme. As with perfectly
invertible expertise, public policy examples that fit this extreme perfectly are difficult
to come by. Despite the lack of realism, however, non-invertibility is the natural counterpoint to invertible mappings and the canonical model. It may be extreme to assume
outcomes are completely independent, but it serves to show that the opposing assumption
of perfect invertibility within the canonical model is equally extreme.
Invertible and non-invertible policy processes are defined formally as follows. These
extreme cases cover only a fraction of all possible processes. I label the remaining
processes (and issues) as partially invertible, and take up this case in the following section.
Definition 1 Suppose the layperson learns ψ (p) = y, where p ∈ I and y ∈ O, and using
Bayes’ rule forms the updated beliefs β (.|p).
(i) ψ is invertible if β (.|q) is a degenerate distribution for each q 6= p.
(ii) ψ is non-invertible if α (x|q) ≡ β (x|q) for each q 6= p and x ∈ O.
(iii) If the policy process is neither invertible nor non-invertible, it is partially invertible.
Partially Invertible Policy Processes
Reality, most often, lies somewhere between the extremes, and partially invertible policy
processes more accurately capture expertise as it is commonly understood. The set of
partially invertible policy processes and issues is enormous, covering every possible case
except those of the two extremes.
6
If the blood loss is 100 times that from a minor cut, should the patient apply 100 band-aids?
7
Although partial invertibility is by itself a step closer to reality, it gives rise to more
questions about the nature of expertise. For instance, what exactly does a layman learn
from the recommendation of an expert (if it is neither everything nor nothing)? Does
learning depend on the issue itself? Can some potential outcomes be ruled out? Does a
layman learn different things about different policies?
To accurately capture the policy process, therefore, it is necessary to push beyond the
issue of invertibility and refine the set of processes and issues further. Generalizing the
canonical model is, however, not straightforward. A principal reason for the longevity
of the canonical model is its simple representation of policy. To usefully generalize
this model it is necessary to obtain a tractable family of policy processes that satisfies
partial invertibility as well as address the questions raised in the previous paragraph.
Unfortunately, simple generalizations with common functional forms (such as linear,
quadratic, or any polynomial form) exhibit some (and often many) undesirable properties.
To see the possibilities that may arise, consider a simple generalization of the canonical
model in which the slope of the policy process is also unknown, taking on values of either
±1. If in this case a layman learns that ψ (0) = y he can rule out many possibilities
but not all as he is unsure whether the true policy process is x = p + y or x = −p +
y. Although relaxing full invertibility, a shortcoming of this specification is that the
layman learns equally about policies that are close to the observed policy (≈ 0) and
policies that are far away (as he knows they must be determined by one of two possible
processes). In practice, however, the accuracy of beliefs depends on how “far” policy is
moved from what is known. For example, as Congress observes the outcome produced
by the current minimum wage level, it seems reasonable that they then possess more
accurate information about the outcome that would arise from a reduction to $5 than if
the wage were lowered all the way to $1.7
This is not the limit of the example’s unattractiveness as also retained from the canonical model are the restrictive assumptions that policy is linear, additive, and monotonic.
In combination, these shortcomings confirm that partial invertibility is a necessary but
not sufficient condition to accurately describe policy processes.
An Analytic Representation
To provide a richer description of expertise, I propose that the policy process ψ possess
the properties of a Brownian motion. More specifically, I suppose that an issue be defined
by the set of Brownian motions with drift µ and variance σ 2 . Thus, on any particular
issue a layman knows that the process is a Brownian motion of parameters µ and σ 2 , with
the nature of the issue varying in these parameters, but he does not know the realized
path.
7
Similarly, the doctor’s advice on a minor cut is more useful to a patient suffering a larger cut than
to one suffering from mental illness.
8
Although the application to policy formation is novel, Brownian motions have been
applied productively in other areas of political science (Carpenter 2002, 2004) and are well
suited to the policy environment. Moreover, the mathematical formulation of a Brownian
motion is simple, tractable, and relatively intuitive. This parsimony aids considerably
the analysis of the following section and should be equally helpful in other applications.
A Brownian motion is a continuous stochastic process with stationary independent
increments. Brownian motions are normally associated with movement through time,
although time plays no role here. Rather, as with the canonical model, the policy instrument is the independent variable. To understand the Brownian motion, consider the
movement of a stock price, a common application. Suppose the price of a stock is x at
time t and we are interested in its price at time t + ∆. If the price follows a Brownian
motion then we don’t know for sure what the price will be at t + ∆ — indeed it may be
any price — but we do have beliefs over the possibilities. For a Brownian motion with
drift µ and variance σ 2 , beliefs as to the time t + 1 price are distributed normally with
mean (x + ∆µ) and variance |∆| · σ 2 . The drift measures the expected rate of change
of the price and the variance the risk involved. Worthy of note for this process is that
changes in the stock price — increments of the Brownian motion — depend only on the
current price and are stationary (dependent neither on the value of t, the independent
variable, nor the current value of the motion — the stock price).
To understand how the Brownian motion is applied to policy expertise, it is useful
to compare its construction with that of the canonical model. In both theories one can
interpret the construction as follows: determine a point in the mapping by randomly
choosing a point in the policy space (instrument and outcome), say ψ (p̃) = y, and from
this point construct the rest of the mapping in either direction. The difference between
the models is that the canonical model requires that the mapping proceed with slope one
in either direction (and the randomly chosen point fully determines the process), whereas
here the path is determined by a Brownian motion in either direction, allowing for much
more variety. In both models the policy path is fully constructed prior to any interaction
between policy makers, and an expert is fully aware of the realized path.
The difference in construction between the theories leads to differences in the beliefs
of a layman, and it is here that the Brownian motion approach bears fruit. If the layman
learns that ψ (p̃) = y then he knows that the policy mapping passes through this point
and is a Brownian motion with parameters µ and σ 2 . His beliefs over ψ (p), therefore, are
dependent on the value y, the parameters µ and σ 2 , and the size of the policy adjustment
p − p̃. Specifically, the expected value of ψ (p) is equal to:
y + µ (p − p̃) .
From the perspective of a layman, however, the true realization of ψ (p) is a random
variable distributed normally with variance |p − p̃| σ 2 , which is increasing linearly in the
9
policy
outcome
x
£
£
£
6
¢@
¢ @
­A
©¢
©
­ A ¡y
A¡
¢
0
¢
¢
©
©
¢
¢
££@
@¢
»P
»
P ψ (p)
¢
¢
³¢
slope = µ
³
-p
policy
instrument
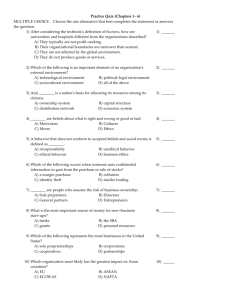
Figure 2: Partially Invertible Policy Process ψ (p): drift µ, variance σ 2 , and ψ (0) = y
distance of the policy p from p̃. (As a point of contrast, the canonical model in this
instance implies with certainty that θ = y − p̃ and ψ (p) = p − p̃ + y.) Figure 2 shows a
Brownian motion that passes through ψ (0) = y, and depicts the drift line through this
point. As depicted in the figure, the path of a partially invertible policy process need
not be monotonic and may have many changes of direction (the drift line describes only
the expected value of the path conditional on ψ (0) = y and not the actual path).
The Brownian motion offers several advantages as an analytic representation of policy
processes, several of which are listed in Table 1.8 The Brownian motion is both partially
invertible and proportionally invertible, the latter capturing the idea that how much a
layman learns about a policy instrument depends on how “close” it is to the policy for
which the outcome is known. In particular, with a Brownian motion the accuracy of
layman beliefs about a policy are proportional to the distance the policy is from a policy
for which the outcome is known.
The parameters of the Brownian motion (µ and σ 2 ) offer a measure of issue complexity.
For fixed µ, an increase in the variance σ 2 reduces the information a layman can infer
from expert actions; consequently, the larger is σ 2 the more complex is the policy issue.
As the same property holds if σ 2 is held fixed and µ decreases, it is most useful to
8
Observations from the rich history of policy making (see, for instance, Carpenter 2001) are consistent
with many of these properties yet they by no means provide an exhaustive account. Additional properties — such as non-stationarity or discontinuities — could be captured by using more general stochastic
processes, such as a Levy process.
10
Properties of Policy Issues:
1.
2.
3.
Properties of Policy Processes: 4.
5.
6.
Partial invertibility.
Proportional invertibility.
A continuum of simple and complex issues.
Full support.
Continuity.
Non-monotonicity.
Table 1: Properties of Brownian Motions
2
represent issue complexity by the ratio σµ , which may vary continuously. It is then the
2
2
case that issue complexity is increasing in σµ . The limiting case σµ → ∞ represents
issues of extreme complexity (non-invertible expertise) such as medical expertise. The
2
opposite extreme of σµ → 0 represents increasingly simple issues (invertible expertise),
such as days of the week, with the broad range of intermediate values capturing the full
gamut of policy issues and expertise between these extremes.
Properties 4-6 in Table 1 reflect a policy process that is more complicated than the
linear and additive processes in the canonical model. The Brownian motion offers full support over policy outcomes, is continuous (but not differentiable), and is non-monotonic.
Full support captures the idea that laymen are ill informed about the impact of a policy
change with beliefs dispersed over wide support rather than focused on two possibilities
as in the simple generalization offered earlier. Continuity ensures that small changes in
policy lead to small changes in outcomes (unlike for non-invertible processes). Finally,
non-monotonicity implies that for a change in policy laymen can not be sure of not
only the outcome that would result but even the direction of the change, a possibility
precluded in the canonical model.9
The possibilities offered by the family of Brownian motions can be seen when applied
to two issues that have presented classic examples of policy making in the United States:
the minimum wage and environmental policy. Expertise on both of these issues is partially invertible, although to different degrees. As argued above, Congress is less than
certain about how a change in the minimum wage would affect the economy. Despite
this uncertainty, members of Congress (most likely) agree that an increase in the wage
would produce a more liberal outcome and a decrease a more conservative outcome. This
agreement on ordering is significant (just as it was important that the absent minded
professor knew that Tuesday followed Monday), and consequently the minimum wage
2
issue represents a relatively low degree of complexity (and a low value of σµ ).
9
This requirement is not simply that a layman is unsure of the sign of the true process’ slope, but
that the processes themselves are nonmonotonic. One may, of course, rearrange the policies such that
the function is monotonic, but this merely transfers the uncertainty to knowledge of which orderings
deliver monotonic processes.
11
In contrast, environmental policy is significantly more complex. For example, knowing
the outcome from command-and-control regulation in the 1980’s informed Congress only
minimally (if at all) about the outcome to expect from, say, a market for tradeable
pollution permits. In fact, members of Congress may be so lacking in expertise as to not
even be sure whether this change would lead to a more liberal or a more conservative
2
outcome.10 Consequently, environmental policy corresponds to a high value of σµ .11
Although these two issues are substantively different, technically they differ only in
degree. Significantly, Congress has historically treated the two issues differently, delegating significant environmental policy making power to the EPA, whereas the minimum
wage is decided within the legislature. In the following section I show that the difference
in complexity between the issues provides an explanation for this pattern of real policy
making.
ISSUE COMPLEXITY AND DELEGATION
A prominent and successful line of research in political science, beginning with the seminal
work of Gilligan and Krehbiel (1987), has been the study of expertise and delegation in
policy making. One stream of this work — and the one I will take as my leading example
— is legislative-bureaucratic policy making. The central problem in this relationship is
the legislature’s ability to take advantage of bureaucratic expertise while avoiding what
is known as bureaucratic drift. Weber described the problem as follows (Gerth and Mills
1958, page 235):12
“Here an early concern of the ruler was how to exploit the special knowledge of experts without having to abdicate in their favor but preserve his
dominant position.”
Underlying every paper in the literature on delegation is a model of the policy process,
and the process typically employed is the canonical model of expertise (Gilligan and
Krehbiel 1987, 1989; Epstein and O’Halloran 1994, 1999; Huber and Shipan 2002; Bendor
and Meirowitz 2004; Huber and McCarty 2004; etc.). As argued in the introduction, this
conception of expertise leads to a commitment problem. I consider here a classic version
of the delegation game and show how the commitment problem arises and how it depends
critically on the invertibility of the policy process.
10
Esterling (2004, ch. 6) provides a case study of this legislation. While most interested parties
agreed that tradeable permits would provide an efficiency gain, there was substantial uncertainty over
the distributive impact of the policy (as well as the magnitude of the efficiency gain).
11
At least given the policy instruments under consideration. If more radical policy proposals were to
be taken seriously — indentured servitude, perhaps — then consideration of wage laws may become more
complex.
12
An analogous problem exists in the floor-committee relationship in legislatures studied by Gilligan
and Krehbiel (1987).
12
A useful reference point for the following results is the foundational work of Bendor and Meirowitz (2004). In addition to providing a broad and thorough treatment of
delegation models, Bendor and Meirowitz consider many variants and extensions of the
canonical formulation. Two of these are particularly pertinent here. First, they allow
generalized functional forms for policy processes and do not restrict attention to linear
additive models. Second, they allow for both the endogenous acquisition of expertise and
for Congress to ignore agency recommendations and pass overriding legislation. Critically, however, the power of override is withheld from Congress when the agency acquires
expertise, which is exactly the case of interest here.
The Model
The players are a Legislator and an Agency, denoted shorthand by L and A, respectively.
For simplicity the players are treated as unitary actors. Policy is chosen once and the
players can either retain the status quo sq or choose a new policy instrument, where the
set of alternative instruments is the real line; thus, I = {sq, R}.13 The outcome space is
the real line, P = R.
The legislator and agency possess ideal points in the outcomes space given by 0 and a,
respectively, where a > 0. Both players have quadratic loss utility functions; the utility
from outcome x is:
uL (x) = −x2 ,
uA (x) = − (a − x)2 ,
where the subscript denotes the player. Risk aversion is not necessary for the results to
follow but represents the default case in the literature (Bendor and Meirowitz 2004).
I consider a simple delegation game that explicitly allows for the full Congressional
power to override agency action. The structure of the game is consistent with classic
models of delegation in the literature (modulo various extensions and generalizations;
Bendor, Glazer, and Hammond 2000; Bendor and Meirowitz 2004; Huber and Shipan
2006). The sequence of play is given in Table 2.
Policy instruments are mapped into outcomes via the function ψ ∈ Ψ, where the issue
Ψ is either invertible, non-invertible, or partially invertible. For non-invertible issues I
assume only that processes are onto functions, and for comparison suppose invertible
issues are as specified in the canonical model.14 For partially invertible issues I restrict
attention to the family of Brownian motions of drift µ and variance σ 2 , which with
probability one are onto functions. Thus, regardless of the complexity of expertise, both
13
Assuming that the status quo is an element of R adds technical difficulty to the following analysis
without substantively changing the underlying intuition.
14
An onto function (also known as a surjective function) requires that for each y ∈ R an x exists such
that ψ (x) = y.
13
Stage 1:
The legislator chooses whether to delegate. If not jump to stage 4.
Stage 2:
The agency decides whether to acquire expertise.
Stage 3:
The agency proposes a policy instrument & the legislator updates beliefs.
Stage 4:
The legislator chooses whether to acquire expertise.
Stage 5:
The legislator decides whether to override the agency proposal;
if so it chooses a policy instrument.
Stage 6:
The selected policy instrument is implemented and mapped
into a policy outcome; payoffs are determined.
Table 2: Timing of the Delegation Game
the legislator and agency possess induced ideal policy instruments (that map into their
ideal outcomes), although such policies may not be unique.15
The legislator and the agency both begin the game as laypeople with equal knowledge
of ψ, knowing µ and σ 2 but not the realized path. Expertise is a binary variable and,
if obtained, the bearer gains perfect knowledge of the policy process (expert beliefs φ
are degenerate). The cost of expertise to each player is cL , cA ≥ 0. I focus on the
case cL = cA = c > 0, ensuring that the emergence of agency expertise is due to issue
complexity and not cost asymmetries; I consider the asymmetric cost case as an extension
in the appendix (including the commonly studied case of cA = 0).
If, from a layman’s perspective, ψ maps the status quo with certainty into the legislator’s ideal outcome there is no need for delegation (nor the acquisition of expertise).
Therefore, I consider issues in which the status quo delivers an outcome that is uncertain and distributed uniformly around 0 with support [−i, i].16 For other policies, as
one may expect, uncertainty about outcomes is greater than for the status quo. I adopt
the standard assumption in the literature that prior beliefs for all p ∈ R are distributed uniformly over the outcome space (Gilligan and Krehbiel 1987, 1989, Epstein and
15
As Brownian motions are stochastic processes, a player’s most preferred policy corresponds to their
ideal policy with probability one.
16
This uncertainty arises naturally with the evolution of technology or the arrival of an exogenous
shock, such as an election that changes the composition of the legislature. An alternative formulation
would be to assume the status quo delivers a known outcome that differs from 0.
14
O’Halloran 1994).17
As discussed in the introduction, the focus here is on Type 2 rather than Type 1
agency agenda control (Bendor et al 1985), and I assume the legislator can costlessly
override an agency recommendation. This assumption impacts the nature of communication between the agency and legislator, with policy recommendations now taking the
form of costless messages. I restrict the channel of communication to be the proposal of
a policy instrument and, by the revelation principle, I study equilibria in which policy
recommendations reflect the information they convey.18
The equilibrium concept is Perfect Bayesian Equilibrium (PBE). I restrict attention
to equilibria in which delegation occurs only when it is strictly preferred. That is, the
legislator delegates only if the agency acquires expertise and the legislator benefits from
this information. Informally, this restriction says that delegation is used only when it is
“value added.”
Utility is written as uL (y|J) when the policy outcome is y and player J ∈ {L, A, ∅}
has paid the cost of expertise, where ∅ represents the null set; uA (y|J) is analogous (in
equilibrium at most one player develops expertise). Note finally that utility is independent of the policy instrument chosen and the identity of the expert (other than through
the cost of expertise c).
Results
I begin by establishing two simple properties that serve as outside options for the players.
First, consider the optimal policy choice of either player in the absence of expertise. In
this case the optimal action is to either choose a policy at random or retain the status quo.
By construction, it is always optimal to retain the status quo, which delivers reservation
utilities:
1
uL (sq|∅) = − i2 ,
3
1 2
uA (sq|∅) = − i − a2 .
3
Observe that these values differ as for the agency the outcome is both uncertain and
has an expected value different from its ideal point. The legislator, in contrast, suffers
17
A uniform prior over the real line is known technically as improper. It is a common assumption
in both statistics and formal models in the social sciences. For invertible issues it is equivalent to the
assumption that θ is distributed uniformly over R. For partially invertible issues uniform beliefs can
be constructed from θ by setting ψ (0) = θ and generating from this point the true mapping in either
direction.
18
That is, if the agency reveals that ψ (p) = x it is conveyed by a recommendation of instrument p
(rather than, for example, recommending p − ε and L knowing to adjust upwards). The restriction to
this equilibrium is without loss of generality and is also efficient if the legislator incurs a cost to override
(including to change) the agency’s proposal.
15
only from uncertainty. Gilligan and Krehbiel (1987) refer to these as informational and
distributional costs, respectively.
Second, the value of uL (sq|∅) implies that the legislator, if acting in isolation, acquires
expertise only if the cost is less than the disutility of the status quo; that is, the legislator
acquires expertise rather than accept the status quo if and only if c < 13 i2 . Denote this
critical value by ciL = 13 i2 , and the analogous value for the agency by ciA (a) = 13 i2 + a2 .
Delegation With Commitment
Before analyzing the full model, I first solve for optimal delegation if the legislator can
commit to the delegation of authority. This case is analytically simpler than the full
model and, when contrasted to the full model, clearly exposes the role of commitment.
The invertibility of expertise is immaterial in this environment as even if the legislator
is able to invert the agency’s expertise it is unable to benefit from this knowledge. Consequently, if delegated to, the agency acts independently of oversight and implements its
own ideal point (conditional on acquiring expertise).
Formally, ignoring the commitment problem in delegation is equivalent to the following change to Step 3 of the delegation game:
Step 3alt :
Agency selects a policy instrument. Proceed to Step 6.
Define the “Commitment Game” as that produced when Step 3alt is substituted for
Step 3. Lemma 1 characterizes delegation in this environment.
Lemma 1 Commitment game. If delegation occurs the agency acquires expertise and
implements its own ideal point (the outcome is a). The domain of delegation is as follows.
2
(α) For c < ciL = i3 , the legislator delegates if and only if a < a1³, where´(a1 )2 = c.
(β) For ciL < c < 2ciL , the legislator delegates if and only if a ∈ a2 , √i3 , where (a2 )2 +
1 2
i
3
= c.
Proof. L delegates only if A acquires expertise, which requires c < ciA (a). This
delivers: uL (a|A) = −a2 and uA (a|A) = −c. Comparing uL (a|A) to uL (sq|∅) and
uL (0|L) implies L delegates only if a2 < min [c, ciL ]. The result follows by simple algebra.
If granted authority the agency acquires expertise and, without the threat of oversight,
chooses its ideal policy. Anticipating this response, the legislator is left with a stark
choice: determine policy independently or receive the agency’s ideal outcome (a). These
incentives lead to delegation of two types.
In the domain of case α both the legislator and agency would acquire expertise.
The agency’s ideal point is sufficiently close to 0, however, that the legislator prefers to
16
delegate and free-ride off the agency’s investment in expertise. Delegation in this case
satisfies the famous ally principle (Bendor, Glazer, and Hammond, 2000).
The delegation of case β is somewhat different. The legislator delegates to more
extreme agencies as it is not prepared to acquire expertise itself. In this situation, the
legislator’s point of comparison is the status quo, rendering attractive any agency up to
a = √i3 . Of course, the legislator would like to delegate to any agency more centrist than
this bound, but it is only the more extreme agencies in this set that are prepared to
acquire expertise. If c > 2ciL both conditions cannot be satisfied simultaneously and no
delegation occurs. Delegation of type β exploits the different willingness to pay of the
players (and that the agency’s willingness to pay is an increasing function of a), and fails
the ally principle.19
Delegation and Oversight
In the absence of commitment the agency operates in the shadow of legislative oversight.
Its ability to influence policy in this setting depends on its ability to control any advantage
in expertise it obtains. The invertibility of expertise, therefore, is critical to successful
delegation, and the following results are demarcated accordingly. In all subsequent results
I return to the original delegation game without commitment.
Invertible Policy Processes:
A useful starting point is to ask: does the equilibrium behavior of the commitment game
hold up in the absence of commitment? For invertible policy processes, the answer is a
simple no. If the agency acquires expertise and reveals the policy that delivers outcome
a (as occurs in the commitment game), the legislator can invert the agency’s expertise
and use its power of override to implement its own ideal point.20
This implies immediately for simple issues that a lack of commitment changes the
nature of delegation. In fact, Theorem 1 shows delegation is not only altered by the
removal of commitment, but that it is fatally undermined.
19
Delegation of variety α but not β is produced if, as is standard, the issue is invertible and the status
quo is modeled as a point in R. This difference reflects another peculiarity of the canonical model as when
expertise is invertible a layman is able to “bias” the policy outcome even without acquiring expertise.
For example, if sq ∈ R delivers an expected (but noisy) outcome of 0 then by simply choosing the policy
a units to the right of the status quo a non-expert agency moves the expected outcome to its ideal point.
The agency can, therefore, remove distributional uncertainty without acquiring expertise, reducing its
willingness to pay for expertise to the same as the legislator (as then only informational uncertainty is
relevant for both) and precluding delegation of type β. This path of play is unlikely to arise in practice
as Congress would never accept the recommendation of an uninformed agency. (Restoring delegation
of type β requires that the legislator possess veto power over agency proposals, such as is supplied by
the closed rule in Gilligan and Krehbiel (1987), and that the acquisition or not of expertise is perfectly
observable by the legislator.)
20
Gilligan and Krehbiel (1987; page 308) were aware of this property of the canonical model, although
it has received little subsequent attention.
17
Theorem 1 Delegation does not occur if the policy process is invertible.
Proof. If c < ciL necessary conditions for the agency to acquire expertise and the
legislator to delegate are a > a1 and a < a1 , respectively, and delegation is not possible.
Consider then c > ciL such that payoffs in the absence of delegation are uA (sq|∅)
and uL (sq|∅). Suppose L delegates and the distribution of policy outcomes has mean
x and variance γ (with quadratic preferences these are sufficient statistics to determine
utility). Equilibrium requires that L sets x = 0, which is possible as ψ is invertible, and
thus uA (.|A) = uL (.|A) − a2 − c. Successful delegation requires uA (.|A) > uA (sq|∅),
2
2
which implies uL (.|A) − c > − i3 , and c < i3 = ciL as uL (.|A) ≤ 0. This establishes a
contradiction and the result follows.21
Delegation fails in this environment precisely because the agency cannot protect its
expertise. In proposing a policy the agency reveals some of its expertise, and on simple
issues the agency has such a small informational advantage that the legislator is able to
appropriate all of the information for its own advantage. Put another way, the agency
must use its expertise to influence policy, but doing so allows the legislator to steal
it. This logic applies even if the agency offers less precise policy proposals — such as
recommending only whether the legislator choose a “high” or a “low” policy, as in the
partition equilibria of Crawford and Sobel (1982) — as the legislator is equally capable of
appropriating noisy information.
Surprisingly, the legislator’s inability to delegate in this environment is a direct result
of its own power. Because the legislator is able to invert agency expertise, the agency
is unwilling to invest in expertise, leaving the legislator worse off. The contrast between
Lemma 1 and Theorem 1 captures how the commitment problem affects delegation under
the canonical model. This failure of delegation implies that for Congress to benefit from
delegation on simple issues it must find ways to “tie its own hands” and endow agencies
with Type 1 agenda control.
Non-Invertible Policy Processes:
The difficulties with invertible expertise do not arise for more complex issues. In this
case the agency recommendation reveals nothing about other policy instruments, even
if the outcome from the proposed policy can be inferred precisely. Consequently, if the
legislator were to override the agency with a different instrument, it would be doing so
with only its prior beliefs to guide it. Delegation, therefore, presents the legislator with
a stark choice: accept the agency’s ideal point or decide policy independently. This is
the exact same choice the legislator faced in the commitment game and, not surprisingly,
equilibrium behavior is closely related — but subtly different — to that in Lemma 1.
21
This result does not depend on cL = cA and applies directly to at least a range of values in which
cA < cL ; see the treatment of asymmetric costs in the appendix.
18
i
i
Theorem
³ 2 For´ non-invertible policy the legislator delegates if and only if cL < c < 2cL
and a ∈ a2 , √i3 , where (a2 )2 + 13 i2 = c. If delegated to, the agency develops expertise,
recommends its ideal policy, and is not overridden by the legislator.
Proof. Consider two cases. (i) c > ciL . If a < a2 the agency
³ does´not learn, and if
i
a > √3 L would ignore A. Thus, delegation occurs only if a ∈ a2 , √i3 . In this domain
L accepts A’s ideal point rather than pay c and Lemma 1 establishes that it is in A’s
interest to learn.
(ii) c < ciL . L delegates to A only if a < a1 (Lemma 1), and if A acquires expertise
uL (a|A) = −a2 and uA (a|A) = −c. However, if A instead does not acquire expertise, L
has the final move and acquires expertise itself, giving: uL (0|L) = −c, and uA (0|L) =
−a2 . As for any potential delegate a2 < c, the agency prefers L to acquire expertise and
delegation does not occur.
Delegation in this environment is driven purely by the complexity of expertise. The
complexity of the issue enables the legislator to make a virtual commitment to not override agency decisions, and this commitment induces the agency to acquire expertise,
leading to delegation that otherwise would not occur. To be sure, the legislator would
like to move policy towards its own ideal point, but its hands are tied by its own ignorance. Surprisingly, the legislator benefits from its ignorance as otherwise the agency
would not acquire expertise (fearing an override) and the legislator would be left to
determine policy on its own.
Legislator ignorance of this sort is apparent on many real issues, as observed by
Moe (1989, p.271): “And, due largely to experts’ specialized knowledge and the often
intangible nature of their outputs, [Congress] cannot know exactly what its experts are
doing or why.” Theorem 2 shows that although such ignorance may be normatively
unappealing, it in fact assists in the efficient formation of policy.
Theorem 2 is notable also by what is missing. In the absence of commitment delegation only occurs if c > ciL and the legislator prefers the status quo to paying for expertise;
thus, delegation of type β from the commitment game survives whereas that of type α
does not. In α delegation (c < ciL ) both players prefer the acquisition of expertise to
the status quo, and in the commitment game the legislator is able to free-ride off the
agency’s investment in expertise. In contrast, the full game reverses the positions as the
legislator moves last and the agency is the one able to free-ride.22
The type of delegation that does survive (when c > ciL ) does so precisely because
the legislator prefers the status quo to paying for expertise. Critically, the agency is still
22
The timing of legislative-bureaucratic interaction is in practice more fluid than modeled here and
some bargaining over the cost of expertise may occur. Regardless of the outcome of any such process,
however, the message remains that the legislator’s independent incentive to acquire expertise fundamentally changes the agency’s incentives and the practice of delegation.
19
prepared to acquire expertise despite the high costs, and it is this different willingness
to pay that drives delegation in the absence of commitment. As the willingness to pay
is increasing in a, delegation to allies is not possible and the ally principle fails.
Partially Invertible Policy Processes:
For partially invertible issues the legislator is able to extract some but not all information
from agency recommendations. Lemma 2 establishes a preliminary result for this environment describing when the information extracted is sufficient to induce the legislator to
override the recommendation. This calculation is dependent on two factors: the benefit
of moving the expected value closer to its ideal point versus the cost of uncertainty. The
critical value such that the cost exceeds the benefit of moving at all is the following.
Lemma 2 Suppose expertise is partially invertible and prior beliefs are updated with the
knowledge that ψ (p̃) = t > 0. A non-expert legislator prefers p̃ to any other policy q ∈ R
σ2
if and only if t ≤ 2µ
.
Proof. Without loss of generality set µ ≥ 0, which implies all policies p > t are
dominated by t. For p = p̃ − ∆, where ∆ ≥ 0, we have:
uL (p) = − (t − ∆µ)2 − ∆σ 2 .
Optimizing:
∂uL (p)
= 2µ (t − ∆µ) − σ 2
∂∆
∂ 2 uL (p)
= −2µ2 < 0.
2
∂∆
Thus, L implements p iff
∂uL (p)
∂∆
≤ 0 at ∆ = 0, which requires t ≤
σ2
.
2µ
The possibility that the legislator does not override provides the foundation for successful delegation. Theorem 3 describes when delegation occurs for partially invertible
expertise.
Theorem
3
invertible the legislator delegates if and only if ciL < c < 2ciL ,
³
´ If ψ is partially
σ2
a ∈ a2 , √i3 , and a ≤ 2µ
. If delegated to, the agency develops expertise, recommends an
ideal policy, and is not overridden by the legislator.
Proof. As the agency may have multiple ideal policies, let its recommendation rule
for µ ≥ 0 be p0 = max Ω, where Ω = {p|ψ (p) = a} (analogously, p0 = min Ω for µ < 0;
if max Ω does not exist let the agency recommend any element of Ω, a zero probability
event for µ 6= 0). For the legislator, all p > p0 are dominated by p0 and the payoff for all
20
p < p0 are as in Lemma 2. The result then follows as a direct implication of Theorem 2
and Lemma 2.
The equilibrium for partially invertible expertise is of the same take-it-or-leave-it form
as when expertise is non-invertible, the only change being the addition of the condition
from Lemma 2. Combining Theorems 1 through 3 together produces the conclusion
that, in the absence of commitment, delegation is possible only if expertise is sufficiently
complex.
2
Theorem 3 specifies only that profitable delegation is not possible if a ≤ σ2µ and is
silent on how the legislator would react in this case if delegation occurred and the agency
recommended its most preferred policy. Simple algebra establishes that the legislator
would not move the policy so much that the expected outcome is zero (instead trading
off lower risk for some remaining divergence). This “partial override” does not allow for
additional delegation as if the agency knew that the legislator would partially override,
it would adjust its initial policy offering accordingly, but anticipating this the legislator
would increase the amount of override, and so on.23 That the legislator would not fully
appropriate agency expertise does offer, however, the opportunity for mutual gain and
the players have an incentive to create institutions that allow this benefit to be accessed
(in ongoing work I consider the possibility that Congressional hearings fill this role).
DISCUSSION
The preceding results show that successful delegation is possible only for complex issues
and when it does occur, agency proposals have the form of take-it-or-leave-it ultimatums to the legislator. Behavior of this sort arises also in models that endow the agent
with Type 1 agenda control, such as the famous setter model of Romer and Rosenthal
(1978), the intra-legislature models of Gilligan and Krehbiel (1987, 1989) and legislativebureaucratic policy making (such as in Epstein and O’Halloran 1994).
The novelty of the current paper is that this behavior arises in an environment with
frictionless legislative oversight. The agency ultimatum presents the legislator with a
stark choice: accept the status quo or go with the agency’s proposal. With unencumbered
oversight power this begs the question: why does the legislator limit itself to only two
alternatives despite holding full power over policy? The answer offered here is expertise,
or lack thereof. On issues of sufficient complexity the absence of expertise creates a fear
of the unknown, and this fear renders the many other alternatives undesirable. Walker
(1969, p. 890) provides evidence that such a fear constrains policy making in practice,
concluding that: “Uncertainty and the fear of unanticipated consequences has always
been a formidable barrier to reform.”
23
It is for the same reason that the legislator cannot delegate to extreme agencies and hope for them
to compromise on policy.
21
The conception of expertise offered here is purely informational, and in this sense
shares a lineage with the canonical model. An alternative — and complementary — view
of expertise is offered by Page (2006, 2007; see also Hong and Page 2001). In Page’s
framework, expertise is best thought of as an ability (or a strategy) rather than a difference in knowledge, and manifests as a superior ability to solve problems. The focus of
Page’s work also differs from here as he studies the use of expertise in problem solving
(and the intriguing question of whether group heterogeneity aids in problem solving)
whereas I focus on the strategic interaction between experts and laymen.
In practice, of course, both facets of expertise are important. Indeed, the duality
of information and skill was present in mankind’s first ever attempt at documenting
knowledge. In their famous Encyclopedie (1751-1772), Diderot and D’Alembert describe,
among other things, the tools and techniques of the mechanical arts, yet they were under
no illusion that knowledge of their book alone would be sufficient to establish expertise
(see Pannabecker 1994 for an account).24
Models of delegation in political science are closely connected to models of communication in economics. Indeed, as frictions disappear the policy recommendations
of bureaucrats reduce to policy advice and the model can be equivalently viewed as a
cheap-talk game with endogenous information acquisition. In that light, my informational theory is a generalization of that in Crawford and Sobel (1982) and subsequent
work. To understand the nature of this generalization, it is best to interpret Crawford
and Sobel in a non-standard way. In Crawford and Sobel the sender and receiver prefer
different actions, the problem being that these actions are subject to a shock (the state of
the world). Crawford and Sobel assume that the state of the world is a single variable and
that the same state is applied to all actions. Alternatively, one may interpret Crawford
and Sobel’s model as containing a state variable for each possible action (a continuum
of states), with the assumption that the state variables are perfectly correlated and thus
describable by a single piece of information. Viewed in this light, my contribution is to
relax this final assumption on correlation. My theory supposes that different actions are
affected by different states and that these shocks are correlated less than perfectly. In the
language of Crawford and Sobel, then, my main result is to show that if the correlation
is weak enough, perfect (but partial) information revelation is possible in communication
equilibria.
With this interpretation in hand, several open questions emerge, the most prominent
24
From a modern informational perspective, a striking feature of Diderot and D’Alembert’s enterprise
is that they encountered considerable difficulties in obtaining the necessary information for their book
due to the desire of the guild members to maintain their informational advantage. This reluctance anticipates the reticence of modern bureaucrats to relinquish their informational advantage to their political
overseers. Further anticipating modern subterfuge, Diderot contemplated the response of enrolling his
associates as guild apprentices to spy on the artisans!
22
being whether the partition equilibria of Crawford and Sobel exist when the conditions
for delegation in Theorem 3 fail? We know that such equilibria exist in the limit of
perfect invertibility, thus whether they also exist for σ 2 > 0, and what the threshold is
for existence, are questions of interest.
Another open question regards Battaglini’s (2002) result that in a multidimensional
policy space with multiple experts the canonical model allows a policy maker to achieve
her ideal outcome by exploiting differences in the agents. The techniques underlying this
result do not obviously extend to policy processes that are less than perfectly invertible,
leaving open the interesting question of whether in this environment, as in the single
dimension studied here, issue complexity restores agency power.
Further extensions include partial learning (of the policy mapping), repeated interaction and, perhaps most interestingly, endogenizing the degree of issue complexity. If
the agency is given freedom over the complexity of policy then it is easy to see that
the agency has an incentive to choose a policy that is sufficiently complex to ensure its
informational advantage is protected, even if this choice trades-off policy outcomes. This
possibility offers an endogenous explanation for the often lamented inefficiency and complexity of modern bureaucracies, and resonates with Fiorina’s famously cynical theory
that the labyrinthine federal bureaucracy is the product of intentional design.25
The canonical model has, for several decades now, provided a parsimonious and insightful tool to understand policy making. The broader theory introduced here captures
elements of reality omitted from the canonical model, and in so doing provides a deeper
understanding of issue complexity and offers a solution to the commitment problem in
delegation. Perhaps most importantly, the simplicity and generality of the framework
should prove useful to the study of policy formation and decision making in many environments.
APPENDIX: ASYMMETRIC COSTS OF EXPERTISE
The legislative-bureaucratic relationship is dynamic, and expertise obtained on one issue
may be usefully applied to the same or different issues in the future. As such, many policy
making situations are more accurately modeled under the condition cA < cL . I briefly
consider this extension here and present two results, one for each extreme of invertibility.
These results reinforce the conclusion that it is only on complex issues that delegation
arises of the sort observed in practice.
25
To interpret Fiorina’s thesis through the informational lens offered here, members of Congress become expert at navigating the bureaucracy where the nature of bureaucratic decision-making is intentionally non-invertible, thereby creating an incumbency advantage over less skilled challengers.
23
Corollary 1 considers non-invertible expertise and shows that the delegation region
of Theorem 2 is expanded when cA < cL as the agency possesses a greater willingness to
acquire expertise. However, the ally principle is only restored in the limit case of cA = 0.
The proof is a simple generalization of that for Theorem 2 and is omitted; Note that a01 ,
a001 , and a02 are analogues of a1 and a2 defined in Lemma 1.
Corollary 1 For non-invertible policy and cA < cL , the legislator delegates if and only
if:
i´
³
h
(i) cA < ciL and a ∈ a01 , min a001 , √i3 , where (a01 )2 = cA and (a001 )2 = cL .
´
³
(ii) ciL < cA < 2ciL and a ∈ a02 , √i3 , where (a02 )2 + 13 i2 = cA .
Delegation of type (ii) is a continuous generalization of that in the equal cost case,
whereas type (i) is new. This delegation occurs despite the agency knowing that L will
develop expertise should it not. The agency develops expertise in this situation as cA is
sufficiently low to warrant moving the policy outcome from 0 to a, and the legislator does
not override as the cost of it obtaining expertise exceeds the benefit of moving policy
from a back to 0. Thus, the asymmetry in costs creates an asymmetry in willingness to
pay, facilitating successful delegation where it otherwise would not occur.
The more interesting case of asymmetric costs arises when expertise is invertible.
Theorem 1 continues to hold for cA < cL as long as the asymmetry is not too great,
although it breaks down for cA sufficiently small. In this case the agency is prepared to
acquire expertise as it is better off letting the legislator appropriate the expertise than
having the legislator remain uninformed and choose the status quo.
The use of expertise in this case, however, is not straightforward as the agency can
only imperfectly transfer its information to the legislator. Crawford and Sobel (1982)
show that equilibria must be of a particular partition form. The following remark describes the main properties in this environment should delegation occur. Krehbiel (1991,
page 93) reports a similar result, referring to it as the “Procedural Commitment Principle.”
Remark 1 If delegation occurs for an invertible policy process when cA < cL , outcomes
possess the following properties:
(i) The expected value of the outcome is 0 and there is no bureaucratic drift.
(ii) The realized outcome is not certain and the agency strictly prefers the certain outcome
of 0.
In this case the agency would like to give all of its expertise to the legislator but
is unable to accomplish even this. These properties are inconsistent with the Weberian
view of bureaucratic power, suggesting that this environment does not represent much
of the delegation that is observed in practice.
24
References
[1] Aghion, Philippe, and Jean Tirole. 1997. “Formal and Real Authority in Organizations.” Journal of Political Economy 105 (February): 1-29.
[2] Austen-Smith, David. 1990. “Information Transmission in Debate.” American Journal of Political Science 34 (February): 124—152.
[3] Battaglini, Marco. 2002. “Multiple Referrals and Multidimensional Cheap-Talk.”
Econometrica 70 (July): 1379-1401.
[4] Bendor, Jonathan, Serge Taylor, and Roland Van Gaalen. 1985. “Bureaucratic Expertise versus Legislative Authority: A Model of Deception and Monitoring in Budgeting.” American Political Science Review 79 (December): 1041-1060.
[5] Bendor, J., A. Glazer, and T. Hammond. 2001. “Theories of Delegation.” Annual
Review of Political Science 4: 235-269.
[6] Bendor, Jonathan, and Adam Meirowitz. 2004. “Spatial Models of Delegation.”
American Political Science Review 98 (May): 293-310.
[7] Carpenter, Daniel P. 2001. The Forging of Bureaucratic Autonomy. Princeton, NJ:
Princeton University Press.
[8] Carpenter, Daniel P. 2002. “Groups, the Media, Agency Waiting Costs, and FDA
Drug Approval.” American Journal of Political Science 46 (July): 490-505.
[9] Carpenter, Daniel P. 2004. “Protection without Capture: Product Approval by a
Politically Responsive, Learning Regulator .” American Political Science Review
98 (November): 613-631.
[10] Crawford, Vincent P. and Joel Sobel. 1982. “Strategic Information Transmission.”
Econometrica 50 (November): 1431-51.
[11] Diermeier, Daniel. 1995. “Commitment, Deference, and Legislative Institutions.”
American Political Science Review 89 (June): 344-355.
[12] Epstein, David and Sharyn O’Halloran. 1994. “Administrative Procedures, Information, and Agency Discretion.” American Journal of Political Science 38 (August):
697-722.
[13] Epstein, David and Sharyn O’Halloran. 1999. Delegating Powers. New York: Cambridge University Press.
25
[14] Esterling, Kevin M. 2004. The Political Economy of Expertise. Ann Arbor: University of Michigan Press.
[15] Fiorina, Morris P. 1977. Congress: Keystone of the Washington Establishment. New
Haven: Yale University Press.
[16] Gerth, H.H. and C.W. Mills (Eds. and trans.). 1958. From Max Weber: Essays in
Sociology. New York: Oxford University Press.
[17] Gilligan, Thomas, and Keith Krehbiel. 1987. “Collective Decision Making and Standing Committees: An Informational Rationale for Restrictive Amendment Procedures.” Journal of Law, Economics, and Organization 3 (2): 287-335.
[18] Gilligan, Thomas, and Keith Krehbiel. 1989. “Asymmetric Information and Legislative Rules With a Heterogeneous Committee.” American Journal of Political Science
33 (May): 459-490.
[19] Hong, Lu, and Scott E. Page. 2001. “Problem Solving by Heterogeneous Agents.”
Journal of Economic Theory 97: 123-163.
[20] Huber, John D. and Nolan McCarty. 2004. “Bureaucratic Capacity, Delegation, and
Political Reform.” American Political Science Review 98 (August): 481-494.
[21] Huber, John D. and Charles R. Shipan. 2002. Deliberate Discretion: The Institutional Foundations of Bureaucratic Autonomy. New York: Cambridge University
Press.
[22] Huber, John D. and Charles R. Shipan. 2006. “Politics, Delegation, and Bureaucracy.” Working paper.
[23] Krehbiel, Keith. 1991. Information and Legislative Organization. Ann Arbor, MI:
University of Michigan Press.
[24] Miller, Gary J., and Terry M. Moe. 1983. “Bureaucrats, Legislators, and the Size of
Government.” American Political Science Review 77 (June): 297-322.
[25] Moe, Terry. 1989. “The Politics of Bureaucratic Structure.” In Can the Government Govern? eds. John Chubb and Paul Peterson. Washington D.C.: Brookings
Institution.
[26] Pannabecker, John R. 1994. “Diderot, the Mechanical Arts, and the Encyclopedie:
In Search of the Heritage of Technology Education.” Journal of Technology Education 6 (Fall): 45-57.
26
[27] Page, Scott E. 2006. “Uncertainty, Difficulty, and Complexity.” Working paper.
[28] Page, Scott E. 2007. The Difference: How the Power of Diversity Creates Better
Groups, Firms, Schools, and Societies. Princeton NJ: Princeton University Press.
[29] Ringquist, Evan J. 1995. “Political Control and Policy Impact in EPA’s Office of
Water Quality.” American Journal of Political Science 39 (May): 336-363.
[30] Romer, Thomas, and Howard Rosenthal. 1978. “Political Resource Allocation, Controlled Agendas, and the Status Quo.” Public Choice 33(1): 27-44.
[31] Walker, Jack L. Jr. 1969. “The Diffusion of Innovations Among the American
States.” American Political Science Review 63 (September): 880-899.
[32] Weingast, Barry R., and Mark J. Moran. 1983. “Bureaucratic Discretion or Congressional Control? Regulatory Policymaking by the Federal Trade Commission.”
Journal of Political Economy 91 (October): 765-800.
27