MASSACHUSETTS INSTITUTE OF TECHNOLOGY LINCOLN LABORATORY TECHNICAL REPORT 828
advertisement

MASSACHUSETTS INSTITUTE OF TECHNOLOGY
LINCOLN LABORATORY
INITIALIZATION FOR IMPROVED IIR FILTER PERFORMANCE
E. S. CHORNOBOY
TECHNICAL REPORT 828
31 DECEMBER 1990
LEXINGTON
MASSACHUSETTS
ABSTRACT
A new method for initializing the memory registers of Infinite Impulse Response
(IIR) filters is presented, This method is shown to significantly reduce the initial transients which accompany the tilteting of finite-length data sequences. Unlike previous
methods, the proposed method makes no a priori assumptions regarding the input signal.
Therefore, the method applies equally well to a variety of IIR designs and applications.
The methad does require a leading segment of the input data for initialization
computations before filtering can begin. For this reason, the method is best suited for
signal-processing applications in which batch processing of the data is employed. In
particular, the method could prove very useful in situations where data is at a premium
and only shorr-length sequences are available, because almost sdl data is usable after
filtering. Applications using sequerrtial-processing of data can be accommodated when
delays at the beginning of a processing segment can be tolerated.
——...,-
TABLE OF CONTENTS
Abstract
ii
List of Illustrations
iv
1.
INTRODUCTION
1
2.
IIR TRANSIENTS AND INITIALIZATION
3
2.1 State-Variable Description
3
2.2 Complex-Exponential Input
4
2.3 Vector-Space Setting
8
3.
I
4.
2.4 Implementation
10
RESULTS
11
3.1 Initialization from Partial Observations
11
3.2 Average-Output-Magnitude Response
13
CONCLUSIONS
14
REFERENCES
15
,.
111
LIST OF ILLUSTRATIONS
Page
Figure
No
1
The average-output-magnitude frequency response of a four-pole elliptic fIR
filter (after Fletcher and Burlage).
2
2
Conventional direct-form implementation of a second-order IIR digital filter.
3
3
Transfer-function magnitudes for a second-order (high-pass) IIR filter
5
4
Filtering a short-length data sequence—zero-initialized transient-response
characterization.
6
F]ltering a short-length data sequence—step-initialized transient-response
characterization.
7
5
6
7
8
Filtering a short-length data sequence—projection-iriitialized
transient-response characterization.
11
Initialization using partial observations-spectral
resonance vs. input frequency.
12
magnitude at system
The average-output-magnitude frequency response of a four-pole elliptic
IIR filter-projection-initialized results.
,.
iv
13
1.
INTRODUCTION
Comparisons between Finite Impulse Response (FLR)and Infinite Impulse Response (IIR) filters are
often based on the computational complexity 1required to achieve a given frequency response. For
aPP]icatiOns requiring fikers with sftarp cutoffs (narrow transition regions), IIR filters are generally
considered better because of the large filter length required in an FIR implementation. Thk d!stirrction
also occurs with (or is compounded by) applications in which the unfiltered data sequence has a short
ovemfl length or comprises shor-i-lengdrnon-contiguous segments.z In such cases, FfR tilters with sharp
cutoffs can become impractical, requiring too great a proportion of the &ta for initialization of the filter
taps. Because the all-zero portion of a comparable IIR filter is considerably shorter in length, an HR filter
could conceivably be used in situations with small-sized data sets. Unfortunately, the transient response
of an IIR filter dktorts the output of the filter on startup, rendering the situation similar to that of the FIR
filter (i.e., an initial segment of data is consumed to initialize the filter in the case of IIR filtering, ontput
sampling is delayed until transients are significantly reduced). For an FIR filter, the amount of data lost is
equal to the filter length N, by one optimistic rule of thumb, a comparable IIR filter would require
approximately the same N samples to significantly reduce its transients. To deal with this problem, it is
often suggested that state initialization (i.e., initialization of the IIR memory registers) be used to reduce
the HR startup transients. Tbe most common method, which is further described below, is based on
approximating the unfiltered signal by a step input. This rcpon presents a new alternative initialization
method derived from a state-variable description and vector-space view of the transient problem. In
contrast to the step-input approximation, this new method is equally suited to all type IIR structures (i.e.,
low-pass, bandpass, or high-pass).
,
I
i
J
Fletcher and Burlage, [2] and [3], working in tbe context of radar-clutter filtenng3 for Moving
Target Indicator (MTI) radar, proposed a method for improving the performance (i.e., reducing the
transients) of IIR implementations in sampling situations as described above. However, their method is
specific for IIR filters designed to filter low-frequency ground-clutter targets; it assumes that chrtterretum signals can be modeled as step inputs with magnitude equal to that of the first recorded data
sample (referred to as step initialization). Assuming that the ground-clutter step dominates the desired
input signal, an appeal to the final-value theorem for Z-transfomrs can be used to calculate an approximation to the steady-state values of the filter memory registers. In the resulting procedure, filter memory
registers are loaded with a scaled version of the leading data sample (the scaling factor is predetermined
by the filter coefficients) prior to the normal filtering of the data. The method’s simplicity is clearly an
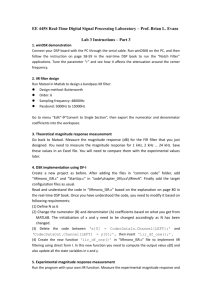
advantage, but Figure 1 illustrates the limited extent to which the filter’s average-output-magnitude
frequency response can be improved. As can be seen from the figure, the response obtained using the
initialization method is still far from the desired steady-state response; in particulm, f-he inability to
match the extent of the stop-band width is a significant deficiency. Note that neither delay sampling nor
delay sampling after initialization offered a substantial improvement toward approximating steady-state
performance.
Development of the initialization method presented in tfrk report was motivated by Llncohr Laboratory’s work with high-pass filters and clutter removal for pulsed-Doppler radars. An initial objective was
1
,!
\
,$,432.,
0.31
------
ZERO INITIAL12zTION
— . STEP INITIALIZATION
—
MAGNITUDE
RESPONSE
i)’
I
o
n/4
Z/2
INPUT FREQUENCY
Figure 1. The average. output. nurgnitude frequency response of a four-pole el[ipric IIR jilter (afrer Fletcher and
BurlogeJ. The dotred lines ilhssmrre average-mognirude responsesfora zero-initialized flkr; responses were computed
by summing the magnitudes of output samples 0-31 and32-63. Therefore, the lower of the WOP1O(S (from samples 3263) represents the average response profile obtained ofier delay-sampling 32 samples. Dashed lines represenr the
Corresponding pro$ies for the srep-iniriolizarion fiher. The solid curve shows the steady-sraie magnitude response of the
filter. Responses are ploued forpositi.e frequencies out to a frequency equal to one half the Nyguisr value.
to improve upon the quantitative results obtainable by step initialization (F@re 1). However, this new
method is considered to be of general interest because it makes no a priori assumptions regarding the
content of the input signal or filtering application; the results apply equally well with any design IIR
filter. However, the improvements realized with this new method are obtained at the cost of additional
computati ens; in contrast to using only the first data point for initialization, the proposed method requires
a leading segment of the input sequence for initialization computations.4 Hence, real-time applications
with sequential processing must be amenable to delays at tbe start of a data block to acquire data for
initialization. For real-time applications using batch processing, thk is not a problem. The required
computations are straightforward--dot products with real-valued weighting vectors—and the additional
computations are not viewed as a prohibitive handicap.
I
I
2
2.
IIR TRANSIENTS AND INITIALIZATION
Primary attention will be focused on the response of a general second-order filter, understanding
that higher-order filters can be obtained by cascading. Extension of the solution to cascaded smuctures is
outlined briefly at the section’s end. All filter coefficients are assumed to be real valued; a block diagram
for the conventional direct-form implementation, which is assumed, is provided for reference in Figure 2.
W,*.2
x(z)
Figure 2. Con.en!ional direct$onn implemenrotion of a second.or’derIIR digimljlhcr: selecting starting values for the
jilrer memory regisrers m,(n) {$ M)(z)] and nl, (n) (L M2 (z)), the object of IIR inirio/iza1i0)7.
2.1
STATE-VARIABLE
DESCRIPTION
For a general second-order filter, complex-valued input x = {X(n); n > – -) and output Y= {Y(n);
are related by the defining equation
n >- -]
y (n)= a~ (n) + a, x (n-1)+ afl (n-2) – Ply (n-l) - /f2v (n-3
which correlates with the Z-transfer function definition
A Y(z)
H(z)=—=
x (z)
a.
+
a,:-’
+ LZ2Z-2
1+p,z-1 +/32#
The internal state of the filter section is specified by the vector
‘(”)=[%1
{LM(Z)’[231
(refer to Figure 2), and the following state-variable description of the filtering equations follows directly:
A’f(rr)
=BM(rl-l)+cx(n)
(la)
Y(n) =ArM (n-l)+ ad(n)
(lb)
and
where
With only a finite-windowed version of the data, {x (n); O < n < N) available, the state-transition
equation is written
M(n)=
BnM_l + ~Bn-k
C X (k),
(2)
k=l
where M-l= [m,(-1 ) m2(-1)]r is the parameter describing the initial state of the filter section. As M_] is
generally undefined in applications, the goal of IIR initialization is selection of a value fl_l that is
appropriate for the filtering application,
The simplest form of initialization is to take ~-1 = @ (the null vexxor),which will be referred to as
zero initialization. In step initialization, fi-l = {1 + /31 + 921-’ [x (0) x (0)]r is chosen to eliminate
transient response due to zero-frequency energy.
2.2 COMPLEX-EXPONENTIAL
INPUT
Working the problem for complex-exponential input allows solving directly for the transient contribution to the output response. A one-sided Z-rrarrsform analysis fora step-modulated’ complex-exponential input, x(rr) = e~%(n), yields the transient output response (assuming for now that M_l =0)
y,r(n).
–ffD(e@)AT
16(n)+r
. I
[
/321u (n-2)
Sinrre Bu[n_~)_rn–2
sin O
- —
SW-1)9
sin 0
(3)
~(ej~),
1
where
1
HD(ej@) =
(1-rej(9-@j)(f
g..ejru )
-re-j(@+o))’
.[’1
=
‘-~m
e-J2(0
‘
and I is the identity matrix. Note that in Equation (3) f) and r follow from a polar representation for
the filter poles (i.e., P = re*j~ and are related to the filter coefficients by ~1 = -2r COS6and ~2 = ? ([1].
PP. 150-162). The vector E (#”) can be viewed aa an extension of input samples to times –1 and -2. The
gain HD (ef~ is from the magnitude response of the all-pole (or recursive) component Of the filter.
Because HD (.$) is determined solely by the filter poles, signal transients can be disproportionately
larger for input energy in the stop-band regions (see Figure 3).
Assuming the processing of short-length data sequences, it is helpful to have an example/characterization Of the transient-response effect, both in the frequency and time domains, to help visualize the
above complex exponential case as well as to provide, a basis for later comparisons. Thk effect is
4
25
-50
x
x/2
0
INPUT FREQUENCY
Figure 3. r’mnsfer-jlencrion ttugnitudes for a second-order
(high-pass) IIRfMer:
the freqMenc.v magnitude response,
/H(W /,ondthedenominatorrespOnse,
/h’.(da) /, are bothplorte-d. Thedenomimtovresponse
the all-pole (recursive) portion of the filler.
isrherespomedue
to
introduced in Figures 4 and 5, which were derived from the processing of 64-ssrnpIe complex-exponential sequences. Input signals were generated with frequencies spanning the range O – rr radians. Each
sequence was processed by a second-order high-pass IIR filter, whose magnitude response is plotted in
Figure 3. The responses in Figure 4 result from zero-initialized processing of the sequencex those of
Figure 5 from step-initialized processing. Each figure contains time-domain plots of the trmrsient-component magnitude (left side) and penodogram spectral estimates of the entire output sequence (right side).
In the time-domain plots, oscillation near the resonant frequency and a characteristic # decay sre
both evident as functions of sample number. In the zero-initialized case, the magnitude of the transient
response vs. input frequency (the axis going into the page) indicates modulation by IHJe!~ 1, The stepinitialized case has a similar characteristic, but shows a msrked improvement at zero frequency and a
significant magnitude increase for frequencies in the filter’s passband.
The perindogmms both indicate two primary spectral contribute@,
one a positive frequency (sweeping the range O – rr and comesponding to the input-signal frequency) and the other a real sinusoidal
component [energy at both + 9, see Equation (3)], attributable to the filter’s transient response. The
characterization in tfds figure can be correlated witfr that presented in Figure 1, in which the averageoutput-magnitude frequency response measures the totul output energy correspondkrg to a given sinusoidal input. Each spectral analysis includes a projection (onto the Magnitude vs. Input-Frequency plane)
of a component attributable to the transient response. In the case of zero initialization, the shape of
thk component is due to weighting both by IHJd? I and the geometric decay of P; however, the irrftuence of Ifl~(d~ 1 is still apparent. For step initialization, this spectral component clearly illustrates
improved performance at zero input frequency but illustrates an apparent compromise at higher passband
frequencies.
5
,,,
SPECTRAL
TRANSIENT RESPONSE
MAGNITUDE
ANALYSIS
,,,4s2.4
,f-------------r
/’
/,
o
4-------------
t
.//l///{------------/ --------------
t
31
630
SPECTRAL
SAMPLE NUMBER
FREQUENCY
Figure 4. Filtering a shorr-lengrh dam sequence—zero-initialized
transienr.response characreri~ation: time-domain
values of the transienr-componem
magnitude (lefI side) and windowed-periodogram
(Kaiser weighting) spectral
estimares of the complete 64-poinr output signal (righr side) ore plotred, Input signals were sampled complex
exponenrial$ having frequencies in rhe range O 10 n (plots are indexed with respect m input-signal frequency from
foreground to background). Each input sequence wax processed by a second-order l[R (high-pass) jilter stage (see
Figure 3). A[lfilrer memory registers were zeroed prior to fih@ring. Va[ues for the transient-response magnitude are
represented on a linear-mugnirude scale: those for the specwal analysis, a log-magnitude scale (values are expressed
in dB relative to a?z arbitrarily chosen level). The rransiem response introduces a signal combonenr with energy
measurable near system resonance. A shaded plot of the spectral compon>nt near resonance is projec;ed onto the
Magnitude vs. lnpui Frequency plane.
6
)
-.. . . .. .. . .. --------i NANSICN
----—-
MAGNITUDE
if ---
----------
‘“+-------------t
//
------------.//’/’/j
/ / .-------------
I
o
31
SAMPLE NUMSER
.
SPECTRAL
I HtSFUNSt
.. .
ANALYSIS
1-
r-
~30
Figure 5. Fihering a short-length data sequence—srep-initialized
transienr-response characterization: the P1O(Sin this
f7gure are companion plots to those of Figure4. The description of thisfigure is the same as in thepreviousfi@re,
except
that theseplots resuhfromprocessing
the dam wi~h a srep-ini~ializedjilter. Note: in contrast to rhepreviou.sf?gure, there
is no transient response corresponding to a zero-frequency input. However, this desired attenuation of the transient
response is quickly lost as the inpur frequency increases, For input frequencies in thejilrer’s passband, the magnitude
of the transient response is actually greater than in rhe zero-initialized case.
Continuing the one-sided Z-transform analysis to compute the response to M_l (i.e., X = 0, which
also provides dre homogeneous-equation solution), the same form as Equation (3) is obtained, as is the
concision that M-l =HD(d”~ z (d”? yields y,, (n) = O for the case of complex-exponential input. As a
special case, taking so= O results in M.l = { 1 + ~, + ~2]-1 [1 1]~ which is the step-initiahzed solution.
The transient response to any step-modulated signal must have the form of Equation (3), because by
direct analogy with the sohstion of second-order differential systems, the transient response must have
the form of the homogeneous solution to the second-order difference equation. By viewing the transient
component {y,,(n); Os n < N } as an element in an N-dimensional vector space, the conclusion is that the
transient response (for a second-order system) is restricted to a two-dimensional subspace. TMs also can
be seen in Equation (3) if E (~? is viewed as an arbitrary 2 x 1 weighting vector (representing the only
degrees of freedom). Hence, for N sufficiently larger than 2, this constraint on the transient component
may be used to advantage for initialization. Thk is the basis for the proposed initialization method,
referred to as projection initialization.
2.3 VECTOR-SPACE
SETTING
Let input and output sequences be viewed as N x 1 vectors in a complex-valued vector space: X, Y ●
C, with Y= ~ (0) y (1).
y (N-1)]~ and X = [x (0)x (1)
x (N-1)17.By componentwise application of
Equations (1) and (2), linear operators F (C2 + d“) and G (C’’”+ ~) can be defined which describe the
relationship between input, output, and initial conditions:
(4)
Y= FJ41+GX
Specifically, F is the N x 2 matrix
AT
[1
*TB
F
.
*TBN-l
and G is the N x N lower triangular matrix
ao
~T~
ATBC
o
0
0.-00
a.
o
000
ATC
0
000
@-o
000
a.
...
G=
AT~
~TBN-2c
{
I
ATBN-3C
o
0
ATBC
ATC
a.
O
ATB2C
ATBC
ATC
a
,
..
In the context of the initialization problem, the filter output can be viewed as bring decomposed into
steady-state and transient components Y = Y,, + Y,, , where following from the previous section Y,, ~
R(F) (the range of F) can be declared. Ideally, the goal of initialization would be to obtain Y,r= 0; or,
equivalently, to find an appropriate criterion for minimizing llY,jl. Neither problem can be formulated
directly; it is necessary to work an approximate problem. In particular, the objective is to make the
transient distortion small, or at least reasonable for a practicable filter.
The projection operator [4] PF = F (FTF)-’FT can be used to provide a decomposition for d, and
the output response can lx written as the sum of two orthogonal components: Y= (1 –PJY + PFY. The
ortfrogorralityof the decomposition provides the relation
WI? = ll(LPF)Yf12+ llPFYll*
which, because PF is a projector for tbe transient-response subspace, can also be written
IIY112
= 11(1-PF)Y,J12
+ IIPFY,, + Y,J12
The first term on the right, II(J– PF )Y,, 11,does not depend o! M_l. If the treatment of llPrY,, + Y,rII could
be rationalized as an approximation to IIY,,11,an initializing M_l could be selected as the solution to
(5)
Proposition
1. For the second-order IIR filtering problem described above, selecting
ti_l = -( FrF)-’ FT GX
(6)
ensures that
where II. IIrepresents the normal Euclidean norm.
In the case of complex-exponential input, tbe transient-component magnitude will be proportional
to the filter’s overall magnitude response I H (d? I instead of the denominator magnitude response
Iff~ (#.I 1. The most significant consequence is that transients elicit~d by input-signal energy in the stop
band are greatly attenuated, because the filter’s zeros now play a role in determining the transient
response. The next section continues the previous numerical examples and illustrates the improved stopband performance.
‘.
,,
Proof. Tbe solution to Equation (5) is obtained by solving PFY = O, which, after substituting
Equation (4) and rearranging, becomes FM_l = -PFGX. Equation (6) follows, given the definition of Pr
For thk choice of M_l we have Y,,= -P,J’~~; therefore, using Parseval’s relation,
(PF Lr.4rrga projection operator and therefore idempotent, has a spectral norm of 1).
9
2.4 IMPLEMENTATION
Implementation of Equation (6) is straightforward, as the matrix (FTF )-lF~G is completely predetermined by knowledge of the filter coefficients. The coefficients of the weighting matrix are all real
valued, tfre inititi]zation computations only require real-valued dot products between input data and
vectors of weighting coefficients. For a second-order filter, four srrch multiplications sre required one
each forthereal andimaginary components of both memory registers. Once arrinitialization vector has
been computed, the initialized IIR filter can be implemented using stmrdard methods. Alternatively, the
output Ycan also be computed duectly by implementing the matrix multiplication Y = (1- PF )GX.
Higher-Order
Filters: Cascading. For a cascade of second-order sections, repeated application of
~~ation-(4) can derive a relationship between input and output that is analogous to Equation (4): Y =
FM_l + GX, where
n
Fi3
(fiGi)F1
[ i=2
~(~GiF2
j .“”[ GnFn_l
i =3
...MJ.ln
T,
[ ‘n
1
‘
M-l 4 [M:l,,
M!1,2
and Fi, Gr and M_l,i represent $e coefficient matrices and initialization vector for the i ‘h filter stage.
Note that now~is Nx2qand M_1is~qx I, where rfisthe number ofsecond-order stages intbefdter.
Correspondingly, rbedimensionoff?(n
will be 2q (assuming no degenerate cases). The initialization
solution here is wh~lly analogous torhe second-order case, and the solution [Equation (6)] applies,with
the substitution of M_l, ~,, and ~ for M.l, F, and G.
1
10
1
I
3.
RESULTS
The previous numerical example is completed by including the case of a projection-initialized filter,
i.e., a filter initialized by Equation (6). The characterization is presented in Figure 6. Referring to the
time-domain plots, with projection initialization there is considerable improvement in the stop-band
extent of transient reduction; there is also a reduction in transient magnitude for much of the passband
region as well. Only for input-signal energy near the resonant frequency is there an obvious increase in
transient magrrimde. Depending upon the application, this increase may not be significant, as the transient component is near the resonant frequency, giving rise to a spectrrd component corresponding to the
input frequency. The accompanying periodogram plots clearly illustrate the motivation for Equation (6).
Viewing the ma nitude of the transient-respnnse spectral conrnbution (vs. input frequency), a modtrlalion by IH (e??
“f is clearly evident.
TRANSIENT RESPONSE
MAGNITUDE
---------------
SPECTRAL
ANALYSIS
,6,,32<
-
“i------------~ /,;/;{_____________
I / /
;,_
(
--------------
1
/
g
=~-
1
0
1
~30
31
SAMPLE NUMBER
SPECTRAL
FREQUENCY
Figure 6. Fihering a short-length data sequence—projection-initialized
{mnsienr-resporrse characterization: the
description of thisfigure is the same as that ofFigure 4, excepr durr the data wereprocessed with api-ojecrion-initio[ized
filter. in comparison IOFigure 5, there is sign$cant attenuation of the transient-component magnitude throughout most
of the stop band and for a large portion of the passband as well. The magnitude of the rmrrsienr. response spectral
component indicares modulation by the fiher’s frequency. respon~e magnitude. 7?ris is in contrast to the two previous
cases where the denominator response modulares the transient-response energy.
3.1
iNITIALIZATION
FROM PARTIAL OBSERVATIONS
To thk point it has been assumed that all data to be filtered are used for initialization; this need not
be the case. For data processed sequentially (as opposed to batch) this usually cannot be achieved.
1
However, if the sequential processing can afford a delay of a number of data samples, initialization based
on these data can be used. Figure 7 summarizes the effect of initialization sample size by plotting
magnitudes of the transient-component spectral cOntibutions for partial observation sets of 64, 48, 32,
and 16 samples. The top plot for 64 samples, the entire data set, corresponds to the shaded (oblique) plot
in Figure 6. Each panel also contains a plot of the corresponding magnimde for the zero-initialized case
(see Figure 4). These results show that the methnd is still exceptionally effective at reducing the transients in response to input energy near the filter zero.
!,,.32.,
o
-20
40
0
.20
a
~ .~o
ti
~
$0
z! -20
-40
0
-20
-40
0
nlz
z
INPUT FREQUENCY
Figure 7. Initialization using parrial observations-spectral magnitude at system resonance vs. input frequency:
spectral magnizude at resonance is plotted vs. inputfrequency. The plots are derived, as in Figure 6, from projectioninitialized high-pass faltering of 64-point input sequences. Four panels are illusrmred corresponding to using the first
64,48,32, or 16 somples for initialization computations. The top panel, 64 samples, uses all available data and is the
same as the obliqueprojection shown in Figure 6. For reference, eachpanel also contains oplot of the spectral magnitude
corresponding to zero-initialized processing. Attenuation of the transient respOnse fOrfrequencies near thefll~er zerO
is well preserued.
4.
CONCLUSIONS
The transient response that occurs at the start of an HR filtering pass usually results in the discardkig
of usable data to aflow for fIR tmrrsient decay. in practical applications, much of the dlftlculty with
transients stems from their dispmpordonately large magnitude in response to input energy in stop-band
regions. This occurs because the trarrsient response magnitude is determined by the filter poles. Projection initiafizatiorr, which takes into account tfte location of the filter zeros, was shown to significantly
reduce the transient-response magnitude in response to input energy near the filter wos. Hence, regarding the filtering of short-length data sequences, the method can improve tfte effective stop-band performance of an HR filter arrdsubstantially reduce the amount of data dkcarded.
The derivations arrd comparisons presented are based on a starrdard second-order filter definition;
extension to higher-order filters was demonstrated by cascading. Tfrk does not imply that the method
only works for even-ordered filter structures. Odd-ordered filters can be dealt with by placing the odd
stage in second-order form (with some degenerate coefficients). The solutions presented can apply if a
generalized inverse interpretation is applied to the solution.
Because the method requires an initial segment of data, it is ideally suited for applications where
data is processed in batch mode. Sequential data processing can be accommodated only when delays at
the beginning of a processing block can be tolerated. However, the method can improve performance,
using only a small initial segment for the initialization computations.
14
REFERENCES
1.
M. Bellanger, Digital Processing of
2.
R.H. Fletcher and D.W. Burlage, “Ao irritialkation technique for improved MTI performance in
phased array radars, ” in Proceedings of the IEEE 60, 1551-1552 (1972).
3.
R.H. Fletcher arrd D.W. Burlage, “Improved moving-target-indicator filtering for phased array
radars,” U.S. Army Missile Command, Redstone Arsenal, Alabama, TechnicaJ Report RE-73-17
(1973).
4.
AS. Householder, The Theory of Matrices in Numerical Analysis, New York
Inc. (1975).
Signals:
Theory and Practice, John W,ley and Sons ( 1984),
15
Dover Publications,