ETNA
Electronic Transactions on Numerical Analysis.
Volume 32, pp. 106-122, 2008.
Copyright 2008, Kent State University.
ISSN 1068-9613.
Kent State University
etna@mcs.kent.edu
LOCAL PROJECTION STABILIZATION FOR INCOMPRESSIBLE FLOWS:
EQUAL-ORDER VS. INF-SUP STABLE INTERPOLATION
G. LUBE , G. RAPIN , AND J. LÖWE
Abstract. A standard approach to the non-stationary, incompressible Navier-Stokes model is to split the problem
into linearized auxiliary problems of Oseen type. In this paper, a unified numerical analysis for finite element
discretizations using the local projection stabilization method with either equal-order or inf-sup stable velocitypressure pairs in the case of continuous pressure approximation is presented. Moreover, a careful comparison of
both variants is given.
Key words. incompressible flows, Oseen model, stabilized FEM, local projection stabilization
AMS subject classifications. 65M60, 65N15, 76M10
1. Introduction. Consider the non-stationary incompressible Navier-Stokes model
)*+"
in !
in # "%$'&($
#"%$'&($
435$76
for velocity and pressure in a bounded domain -,/.10 , 2
. A usual approach
is to semi-discretize in time first with an 8 -stable implicit scheme [17]. In each time step,
the resulting problems can be solved via a fixed-point or Newton-type scheme [17, 22]. This
leads to auxiliary problems of Oseen type
(1.1)
(1.2)
9;:=< >?$#@BACD?
#EFGHIJKLM NO"
in $
in $
E P)R UJV 1W 9BX T
QP)R 9;S T
with
0 , and
0 , with coefficients
KMYZ" a new right-hand side
(stemming from time discretization).
The Galerkin approximation of (1.1), (1.2) may suffer from two problems: violation of
the
discrete
inf-sup
![
\E]\_^ `@ac
bedfhgji (or Babuška-Brezzi) stability condition and dominating advection, i.e.,
. The traditional way to cope with both problems in a common framework is the combination of the streamline-upwind/Petrov-Galerkin method (SUPG) [7] and
the pressure-stabilization/Petrov-Galerkin method (PSPG) [18]. An overview
about residual
stabilized methods can be found in [5, 24]. More recent results for k - finite elements are
proven in [20].
This class of residual based stabilization techniques is still quite popular, since they are
robust and easy to implement. Nevertheless, they have severe drawbacks which mainly stem
from the strong coupling between velocity and pressure in the stabilization terms [5]. Therefore, other stabilization techniques have appeared recently, in particular the edge-stabilization
method [5, 8] and variational multiscale (VMS) methods [9, 13, 15, 16]. We emphasize that
almost all stabilization methods can be interpreted as special VMS methods. The key idea
of VMS methods is a separation of scales: large scales, small scales, and unresolved scales.
The influence of the unresolved scales on the other scales has to be modeled. Mostly, it is
assumed that the unresolved scales do not influence the large scales.
l
Received November 29, 2007. Accepted for publication July 4, 2008. Published online on February 9, 2009.
Recommended
by A. Rösch.
Department of Mathematics, NAM, University of Göttingen, Lotzestrasse 16-18, D-37083 Göttingen, Germany
(lube, grapin, loewe@math.uni-goettingen.de).
106
ETNA
Kent State University
etna@mcs.kent.edu
LOCAL PROJECTION STABILIZATION FOR INCOMPRESSIBLE FLOW
107
Currently, there are two variants to apply VMS methods to the full Navier-Stokes model.
In most papers, an equal-order interpolation of velocity-pressure is applied; see, e.g., [2, 9].
Besides the rather simple
implementation
into existing codes, a formal reason is appearantly
mn
"
that in the Euler limit
no second-order derivatives occur. Other authors prefer discrete
inf-sup stable velocity-pressure
pairs [16] as this is the “natural” choice from regularity point
poq"
of view for fixed
. A comparison of both approaches is still missing.
Local projection stabilization (LPS) as special VMS-type methods are of current interest
[4, 21]. Here the influence of the unresolved scales on the small scales is modeled by additional artificial diffusion terms for the small scales. In particular, the sub-grid viscosity model
[14] can be interpreted as a special LPS method. In Section 3 of this paper, we present a unified theory of LPS methods for equal-order and inf-sup stable pairs in the case of continuous
pressure approximation. In Section 4, a comparison of both variants is given with respect to
theory and simple numerical experiments.
\Br\tsGu v
s wxy/z sGu this
for the norm in thew Sobolev spaces
w|{ the standard notation
U >Throughout
9;S
S >wx*$'paper,
are
used.
The
-inner
product
Ie$O} v
\?\ ` a b v f
w~in
a domain is denoted by
9BX #wx
, the index is eventually
. The norm in
is denoted by
. For
omitted.
2. Variational formulation and stabilization. Here, the basic Galerkin finite element
formulation and its stabilized variants via local projection (LPS) are introduced. Moreover,
different technical tools are given.
2.1. Basic Galerkin approximation. The basic variational formulation
Q>?$#@ for
AC
P the Oseen
(1.2)
with
homogeneous
Dirichlet
data
reads:
Find
problem
(1.1),
R UJ V T
91S 0
, such that
%y?$7y d #EKL$ d qC=$7NO d >r$N; d ) $ d
(2.1)
(bh u f
(`L b f
=
=
N>$' PJ
.
for all
$ Pq 35$765
A SSUMPTION 2.1.
0 oq
2 "
beR a bounded,
polyhedral
),.
P 9X Let
+, P
R 9BX W domain.
UMV T More9;S T E P
over,
assume
that
with
in
,
,
0 with
0
NGE"
KMYZ"
a.e. in and constant
.
E
R EMARK
equation.
In particular,
#2.2.
E$'GUsually,
¡¢x" is a finite element solution
G¡ of the OseenQ
¢E
there holds
for certain test functions . Therefore
is small but does
not vanish
inG
general.
within
is to
V '£for
V >£tH
'£M
I¤;$¥= d A remedy
tIiterative
¤;$¥= d methods
I¥$'¤¦a d Navier-Stokes
V
)O£¦¤1simulation
$'¥= d;§
replace
by S
S
S
R EMARK 2.3. It is possible to extend the!
analysis
rE in this paper to a situation resulting from Newton K¨
iteration
including
the
term
. A small time step, resulting in a
Y©3\OE]\_bª`]a?bªd]ff>i*«_i
sufficiently large
, ensures coercivity of the Oseen operator since
>KL$B d 'tH'E]$; d Y!#K¬q\HE]\tbª`@a?bªdff#i*«_itO\(­\ S Y V K\*\ S
.
¡ S
We consider a shape-regular, admissible decomposition ® of into 2 -dimensional simk°¯
plices, quadrilaterals in the& two-dimensional
case or hexahedra for three& dimensions.
Let
&
P
¡
P
¡
® and k ¡ be the maximum of all k@¯ ,
® . Let ± be a
be the diameter of a cell
reference element of the decomposition ® .
We set
P¬¹ s &1$& P ¡ $
² stu ³´AC µ ¡HP 9 S B¶ µ ¡ ¶
¯·B¸=¯
±
®
&
¹ sr &?
± is the space of all polynomials of degree º defined on ± , and
where
» stu ³´ AC Gµ ¡ P 9 S ;¶ µ ¡@¶
P¬¼ s &­$'& P ¡$
¯ ·B¸ ¯
±
®
ETNA
Kent State University
etna@mcs.kent.edu
108
G. LUBE, G. RAPIN, AND J. LÖWE
&
¼ s &?
± the space of all polynomials on ± with maximal degree
with
s¾u ³ ´ coordinate
T W
¡ u s¾º inR » each
½
0
direction.
The
finite
element
space
of
the
velocity
is
given
by
or
¡ u s ¾ R ² s ¾ u ³G´ T W
¡ us ¾
¡ us ¾
½
0
with scalar components ¿
of ½
.
¡ u s'À simplicity, we restrict the analysis to continuous discrete pressure spaces
» s'À_u For
³G´ WÁ ¡ u s'À ² s'À_u ³G´ WÁ or
. For an extension to discontinuous pressure spaces,
we refer to [23].
The subsequent numerical analysis takes advantage of the inverse inequality
V \*\ u $ÌË@& P ¡]$°ËL¡ PM ¡ u s ¾]$
S
¶Ç¶ 1¶ u
V ¯È ÃĪÅƺ É k°¯ Ê
¯
(2.2)
Â5ÃÄeÅÆ
®
¡ u s¾
½ V .W For
and of the interpolation properties of the finite element space
o V
µ
Î
P
J
U
U the Scott-Zhang
¡É u s ¾
Í
,Ï
[26,
1],
one
obtains
for
quasi-interpolant
operator
S with
Y
&?Ü
Ô
AC×Ö
µ ¶ ÐrÑ PUÓÒ Ô ¯ ,Õ
Ï , on the patches ¯
,
Û
¯@ت٠¯Ú
Þ
ÁÝoZ"H¶Ç\ µ ¡ É u s ¾ µ \OÞu
Á kßà¯ Ê Þ \ µ \ u ТÑ=$á"
ÎäHåeæ=
Îç$ §
Ò
Ò
ÈZâ¨È+ã
Í
¯ È
º É
Õ
(2.3) Â
É
º Ê
É¡ u s ¾ A m ¡
This property can be extended to the vector-valued case with è
. Similarly, an
¡ u s'À
interpolation operator Í é
satisfying (2.3) can be defined for the pressure.
2.2. Local projection stabilization (LPS). The idea of LPS-methods is to split the discrete function spaces into small and large scales and to add stabilization terms of diffusiontype acting only on the small scales. Consider two obvious choices of the large scale space:
6, 21]të is to
(i) The first variant [4, ¡
determine the large scales with the help of a coarse
¡
mesh. The coarse mesh ê
Ä
ë
P Ä>ì í ¡ is constructed by coarsening the basic mesh ® ,
such that each macro
with diameter kLî ¡ is the union of one or more
ê
& P element
¡
neighboring cells
of is non-overlapping and
® . Assume that the decomposition ê
shape-regular. Moreover, the interior cells are supposed to be of the same size as the macro
cell:
Á)oq"y¶
Á
$ÌËL& P ¡$ ëïP
¡5$
&
ë §
(2.4)
Â
k@î È
k ¯
®
ê
with ,
¡É
Following the approach in [21] we define the discrete space ð
for
¡ the velocity as a disê
continuous finite
element
space
defined
on
the
macro
partition
. The restriction on a
ëïP
¡
¡É ë BA} µ ¡ ¶ ¶ µ ¡ñP
¡É §
ð
ê
macro-element
is denoted by ð
î
É A 91S ë Hm
¡É ë ð
The next ingredient
is a local projection
, which
¡É µ ò ¶ î A}
ëó
P
¡ defines the
É µ ¶ ¡É A 91S cm
¡É
ð
ò î
global projection9;S ò by ò
î
î for É allA 91S ê pm . Denoting
9;S ¡
the identity on AC by ô2 , the associated fluctuation operator õ
is
É¡
¡É
defined by õ
ô2
ò . These operators are applied to vector-valued A functions
R 91S ÷T inm a
É¡
component-wise
manner.
This
is
indicated
by
boldface
notation,
e.g.,
ö
0
R ¡É T
É¡ A R 9;S T m R 91S ÷T
ð
0 and ø
0
0 .
¡É
(ii) The second choice [10, 21]¡ consists of choosing a finite element
of
ð
¡ u s'À
¡ u s ¾ discretization
lower order on the original mesh ® or by enriching the spaces
and
.
The
same
¡y
¡
abstract framework as in the first approach can be used by setting ê
® .
¡
¡
Analogously a discrete space ðé and a¡ fluctuation
N> ¡ $> ¡ operator
PM¡ u s¾ õ%é can
¡ u s À be defined. The
stabilized discrete formulation reads: find
, such that
¡]$ ¡¢+ù¡ ¡$ ¡ 9 ¡¢($
Ë ¡) µ ¡$'G¡ PM ¡ u s ¾
¡ u s'À $
(2.5)
8
¬
where the additional stabilization term is given by
ù ¡ ¡ $ ¡ BAC
ú
É¡ 7#Ex ¡ L$ É¡ '#EFt ¡ =
ø
î
´xýhþ î ø
îûì ü
¡ #)* ¡ L$ ¡ ÷ ¡ ' ÿ
É¡
¡ ($ É¡
H ¡ Ã î õré
õ5é
ø
(2.6)
î
î ø
î
§
ETNA
Kent State University
etna@mcs.kent.edu
109
LOCAL PROJECTION STABILIZATION FOR INCOMPRESSIBLE FLOW
R EMARK 2.4. Another variant is to replace the first right-hand side term of
ú
by
É¡ #y ¡ L
$ É¡
y ¡ 7 ø
ø
î
î
´
îpì ü
ù ¡ Ie$O}
see the corresponding result in
ÿ Remark 3.9.
The constants þ î , Ã î , î , and
ù ¡ Ie$Oî } will be determined later, based on an a priori estimate. Notice that the stabilization
acts solely
ù ¡ on the small scales. Of course, there are
some more degrees of freedom in the choice of ; see also [4, 21].
É¡
In order to control the consistency error of the õ -dependent stabilization terms, the
É¡
space ð
has to be large enough; more precisely we assume the following.
"
É¡
A SSUMPTION 2.5. The fluctuation operator õ satisfies, for È!ã;È º É , the following
approximation property:
Â
(2.7)
Á ûo+"¶
\ É¡ %
\ u
õ
î
È
Á
k ßî ¶ %¶ u $ÌËL PU ë
î
ß
ß
º Éß
($Ë ë
P
ê
¡ §
¡
Due to the consistency of the õ é -dependent stabilization term, thus involving the space
¡
ðHé , we do not need such a condition for ðñé . In Section 3.5 several choices for the discrete spaces will be presented. For the analysis, the following properties of the stabilization
term (2.6) are required.
$ P
R W UV ÷T
L EMMA 2.6. There holds for all
¡
M
¶ù ¡ ô
¬ù¡]
ô
ô
ù¡]
ô÷ô÷ô
(2.8)
(2.9)
(2.10)
¶
ù ¡ $ È
;Yq"%$
$
$
îpì ü
È
$
ù ¡ $
ä ´ ÿ î
îpì ü
¶ ­¶ S Á S
V
Á
¶ ¶ S $
V
>?$#@($
´
\OE\ S bª` a b ff i à î .
î
ýþ î
Proof. Property (ii) is trivial and (i) follows from the Cauchy-Schwarz inequality. Inequality (iii) can be derived from
with
Á
$
A}!Á S ä
ù ¡
$
È
Á S
ú
îpì ü
using Assumption 2.5 with ã
´ ýþ î
"
\E]\ S bª` a b
î
ff i ¶ ¦¶ S u
V î
¶ ¦¶ S u
V î
à î
ÿ
î
¶ ¶ S u
V î
$
for the fluctuation operator.
¢¡É
construct
a special interpolant
A 2.3.
1m
UMV Special
¡ interpolation operator. Following [21],
µ rwe
91S
¡É µ
¡É
¿
for
the
velocity,
such
that
the
error
is
-orthogonal
to ð
for all
µMP+UM V . In order to conserve the standard approximation properties, let us suppose the
following.
oq"
A SSUMPTION 2.7. There exists a constant É
(possibly depending on º É ), such that
µ ¡$'G¡
åªæ ¾
Y
oZ"$
î
´
É
´
b
f
\
\ u \O ¡ \ u
µ
¡
(2.11)
´ ´ ¾
ì
î
î
Æ ì
î
$ !&#"% '
)(
¡ u s ¾L ë BAC Gµ ¡]¶ ¶ µ ¡ P ¡ u s ¾$ µ ¡"
ë
where ¿
on .
î
¿
É¡
R EMARK 2.8. The space ð
must not be too rich, since the inf-sup condition (2.11)
¡É
has to be satisfied. On the other hand, ð
must be rich enough to fulfill the approximation
¡É
property (2.7) . Later on, we will present several function spaces ð
which satisfy (2.11).
ETNA
Kent State University
etna@mcs.kent.edu
110
G. LUBE, G. RAPIN, AND J. LÖWE
*,+.-
ÁNoq"
, if there exists a constant
independent
In the following, we use the notation
Á
of all relevant sizes, such as mesh size, polynomial degree or coefficients, such that È
.
L
EMMA 2.9. Let Assumption 2.7 be satisfied. Then there are interpolation operators
É¡ A m ¬¡ u s¾
¡
¢¡ É A UJ V m
¿ and
, such that
µ ¡ É µ $7¡¢ d "%$ ËLG¡ P
¡É $IË µûP¬U V ($
(2.12)
ð
ç
u
Ð
\ µ ¡ É µ \ u k]î ¶ µ ¡ É µ ¶ u
ç;
\
\
$
µ
k
ßî
V î
(2.13)
î
S
É
ß
º É
º Éß
/
for all
µûPU
W M
U V and
ß *
0+ 21
/ É¡ $43 ¡ d Î"%$ÌË53 ç ¡ PR ð ¡É T 0 $°ËL PM
¶ ¬ É¡ 1¶ u
/ V î + ç; É k º ßî Éß \*1\ ß u Ð 1 $
> (2.14)
/ É¡ ;\ u î
\*
(2.15)
k î
S
º É
-
$
76
P!R U ÷T W ë P
ç
Dç
Ô
A}/Ö
Ô
¡
¯ is a
ê
, and È)ãÈ º É
. Here î
for all
ß ë 0P
¯ î
¡,
ê
neighborhood of
.
For better readability, we put the proof in the Appendix. Analogously, a corresponding
result can be proved for the pressure.
o"
L EMMA 2.10. Suppose that there exists a constant
(possibly depending on º ),
é
é
such that
µ ¡$'¡¢
§
åªæ À
Y
î
´
´ ´
(2.16)
´ À b f \ µ ¡ \ u \* ¡ \ u
ì
é
î
î
Æ ì
î
9 !&8"% '
m
¡ u s'À
¡ A
Then there exists an interpolation operator é
µ ¡ µ $7¡¢ d %
" $
Ë ¡
L
(2.17)
é
ç
\ µ ¡ µ \ u k]î ¶ µ ¡ µ ¶ V u
ç ;
(2.18)
é
î
é
î
S
º
é
é
0+ , such that
¡ $
ðHé
k ßî \ µ \ u Ð
ß
º ß
é
P
21
$Ë µñP
W U
§
ß R EMARK 2.11. The estimates
of Lemmas 2.9 and 2.10 are optimal with respect to kLî .
¶¶ V u
The estimates in the norm
î are seemingly sub-optimal regarding to º É and º .
é
3. A priori analysis. The next goal is an error
estimate
for
the
scheme
(2.5).
Therefore,
¡ u s'À
¡ u s'À
¡ u s ¾]$ ¡ u s ¾
further assumptions on the finite element spaces
,
and ð
are required.
;:
3.1. Stability. First, the stability of the scheme will be shown. The standard approach
is to provide this in the mesh-dependent norm
\¶
=<¶ R
¶e\­AC
TI¶ S \O%\ S ?>
@ y;\ S
¶ R T ¶ S ACN\
$
A 1\ S
\OK
ù ¡ $ ($
n>$' PÝ
o~"
for
. Here we prefer a separated approach for
with suitable
¶ R T¶
velocity and pressure by using first the
semi-norm and then a post-processing argument
for the pressure.
L EMMA 3.1. The following a-priori estimate is valid
(3.1)
B y
\O
A ¡ \ S !\*K
Hence, uniqueness and existence of
¡ \ S
È
¡ P ¡ u s ¾
¶ R ¡ T¶ S
È
$' ¡ d §
in the scheme (2.5) follows.
ETNA
Kent State University
etna@mcs.kent.edu
111
LOCAL PROJECTION STABILIZATION FOR INCOMPRESSIBLE FLOW
#Eñ HI ¡ $' ¡ d
Proof. Integration by parts yields
therefore
¡]\ S
¡]\ S
V '#/_ErI ¡ $ ¡ d
S
Q"
, and
¡¢N¶ R _¡ TI¶ S §
¡ PJ ¡ u s ¾
This implies (3.1), hence uniqueness and existence of the discrete velocity field
of the scheme (2.5).
¡P
¡ us À
The corresponding result for the pressure
ff i
)\\ ` a bedf qåefollows
æ d ° Lfrom
E Lemma
Ý\OE@\ bª` 3.2
a bedand
Lemma 3.1. Here, we use the notation X
,
, X
.
(3.2)
+ù¡¢*
8
¡$
¡¢Ý\O
\OK
ù¡]
¡%$
DC
E
o+"
L EMMA 3.2. There exists a constant
dependent on the continuous inf-sup constant
and on the polynomial degree º É but independent of the mesh size k , such that
Á ;E
ç
X
\IL¡\
Á Kñ
Á y+Á
¶ R ¡_TI¶;
\ \ V $
X
È
¯
(3.3)
KÁ S
Ê
BJ
AE FHG .I J I
J .I S ä îpì ü ´ î \E\ Sbª`]a?b î ff>i Ãî and Á
L
7K
¡ 1
M V äN îPsOR¾QS T 1 . ÁJ
Á /Á
¯
where
is
ýþ
the constant in the Poincaré inequality.
Proof.
Using
range
theorem,
the
the exisɡ yields
V \ ¡ \ inf-sup condition
PJ
eN
¡
¶ ;¶ continuous
¡ AC
R U V theT closedM
0 with
tence of
and V È
. We set
. Lemma 2.9
together with the triangle inequality imply
ç
ç
ç
¶ ¡]¶ V
¶ 1¶ V +Á ç;
¶ 1¶ V
ç1+Á ç;
\L¡\ yAÁ \L¡\ §
È
È
º É
º É
ý
É
É
M
K
F
/
K
F
Consider now
$ ¡ d N
(3.4)
8
VU
ù ¡ O ¡ $> ¡ $7"'xj ¡ $7 d ú
&
Ä V
Ä
WU
Ý\ ¡ \ S ú
&
with terms Ä given below. Standard inequalities and integration by parts imply
& V )#¡%$y¡ d #KLB¡$¡¢ d
EFGIB¡$¡¢ d
Á 1E
X
X #KÁ \O ¡ \ S \ K ¡ \ S
¶ ¡ ¶
V
È
KÁ S
Á 1E
X
X #KÁ Á ¶ R ¡ TI¶r\ ¡ \ $
È
KÁ S
J I J
J I J
=F F where
J
Á
J K F X
JK
stems from the Poincaré inequality
&
S
!ù¡]
È
¡%$G¡$'"'
I Á ¬¶ R
È
¡_TI¶r¶ ¡@¶ V
ù¡
È
K
J ¶ ¡@¶ V . Lemma 2.6 gives
¡¢ ù¡] ¡%$7"($G¡$'"¢ \( ]
¡ \
Á
È
¡$
I Á@ Á
G
¶ R ¡ T¶r\L¡\ §
Integration by parts (for continuous discrete pressure space) and Lemma 2.9 yield
& )¶j
N¢¡xM*$>@¡¢ d ¶ N¶ª ¡ M$@¡¢ d ¶)¶ª¡xM$ É¡ @¡¢ d ¶
õ
Á S S
ç
Á
¶ R ¡ T¶
ä
¶ R ¡ TI¶¢\I ¡ \ §
ú
k î ¶ 1¶ S u
k î
V î
ÿ
È
È
S ÿ
î
É
º
î
î º É î
U
ZY
[
Ä V
G
& $
Ä
ETNA
Kent State University
etna@mcs.kent.edu
112
G. LUBE, G. RAPIN, AND J. LÖWE
$ ¡ d
\ \
¶ ¡ ¶
\ @\
­
RU
V ÷T
V
V with the norm
V in
È
Furthermore, there holds
Ê 0 .
Ê
Ê
Using all these estimates, we obtain from (3.4),
Á E
X
\I ¡ \
Á
Á K­
Á
Á
¶ R ¡ TI¶ Á ¶ª¶ ¶e¶ $
V
X
ý
È
¯
(3.5)
KÁ S
Ê
¡
Á
A} V ä
s¾
where ¯
.
î
F G
1
M N ORQS T 1
I J
I
J
J I K
3.2. Approximate Galerkin orthogonality. In LPS methods the Galerkin orthogonality is not fulfilled and a careful analysis of the consistency
has to be done.
s'À
¡ P ¡ u s ¾
¡ uerror
P
L EMMA 3.3. Let
be the solutions of (2.1) and of
¬ and
(2.5), respectively. Then, there holds
+ù¡* ¡%$ ¡¢1ù¡ $ ¡¢($
Ë ¡ PJ ¡ u s ¾
¡ u s'À §
(3.6)
8
Proof. The assertion (3.6) follows by subtracting (2.5) from (2.1).
Now the consistency error can be estimated with the help
Lemma 2.6. #Ep5I
=$#@ ofP/
P
¾
L
EMMA 3.4. Let Assumption 2.5 À be fulfilled and
¡ with
U
@ " P|U
ë
P
V ë
V ë ,
for all
. Then, we obtain for
0 ,
ê
ß
" ß $
È+ã É ã È º É ,
é
À
¾
S
S
¶ ù¡ $ ¡¢O¶
¶ R ¡ TI¶ §
ú
k î ß ¾ ¶j
EF ¶ S ¾ u ÿ
k î ß À ¶ ¶ S À u
V î
(3.7)
î
S
î
´ þ î º ÉS ß
ß
ß
º ß
îûì ü
é
^]
\
]
K
&]
+ F
Proof. Lemma 2.6 yields
$ ¡r
ù¡ $
ù ¡] ¡]$ ¡¢
ù¡ $ ¶ R ¡T¶ §
È
È
)*+"
Assumption 2.5 and
imply
À
¾
S
S
ß
ù¡] $ ú
ÿ
k î ß ¾ ¶j
EFGI­¶ S ¾ u k î À ¶ ¶ S À u §
V î
î
S
î
´þ î º É S ß
ß
ß
º ß
îûì ü
é
ù¡]
_]
+
Now the assertion follows from these estimates.
3.3. A priori error estimate. The a priori estimate can be shown by using the standard
technique of combining the stability and the consistency results of the last subsections.
>?$>L P
T HEOREM
3.5.
+ be the continuous solution of (2.1) and
s ¾ ¡ u s'À
¡ñQ
>B¡$>L¡ P
¡ u Let
À
¾ the
the discrete solution
ofU (2.5).
n?$#@ PN
Ó
P
P)R U that
T
V We assume
V solution
is
sufficiently
regular,
i.e.,
,
#EGI PR U ¾
0 , and
ß
ß
÷T
ß 0 . Furthermore, let the Assumptions 2.5 and 2.7 for the coarse velocity
¡É
¡
space
be
satisfied.
ð
ç
ç For the space
äåeæ ðñ$é we assume that (2.16) is satisfied. Then, there holds
for Èqã É È º É and Èqã È
º º É ,
é
é¾
S
¶R ú
¡ T¶ S
k î ß ¾ \ #E t­\ S ¾ u Ð
(3.8)
´ þ î º ÉS ß
ß
îpì ¾ ü
À
S
S
ç S
ç S
ß
ç;
ç;
Á
\¦\ S À u Ð
$
k î ¾ ß Á É \( \ S ¾ u Ð
k îÀ
V
V
S
S î
S
S îé
É
ß
ß
º É ß Ê
ß
Ê
º
é
é
]
F
+
K
]
1
F
H] 1
F
K
] 1K
ETNA
Kent State University
etna@mcs.kent.edu
113
LOCAL PROJECTION STABILIZATION FOR INCOMPRESSIBLE FLOW
where
ACN\\ ` a b
Á É
î
Á
ACÎÿ
îé
î
ç
î
f à î
ç
S
k î > Kû
º É
S
k î §
º
é
2`
ç
ÿ
þ î
\E\ S bª`]a?b
Ãî
î
ff>i
î
$
þ î
`
Proof. The error is split into two parts
J ¡ $>ñ ¡ )
¡ )
We start with the approximation error
yield
/ É¡ $#ñ
¡é @ / É¡ J ¡ $ ¡é ñ
¡ §
/ É¡ $>û ¡é @ . Lemma 2.9 (i) and Lemma 2.10
À
S
ç
ß
É
¶ R ¡ $#ñ ¡ @T¶
(3.9)
/
é
+0F ç; K F ú ´ º kS ß î À Ê S ÿ î \I \ ßS Àa] V u Ð21 K îpì ü
é
¾
é
S
ç
S
ç;
ú
\O\ ` a b f K k î \OE@\ S bª`@a?b ff>i
k î ¾ ß \*\ S ¾?] u Ð 1 §
V
K
F ÉKF ´ ý
Ãî
îþ
î
S
S
î
º2É`
ß
º É ß Ê
îpì ü
z¡ACN\b ¡$ ¡) É¡ B¡$ ¡ ;@¡
Now we estimate the remaining part
via Lemma 3.1,
Õ
/
é
ù ¡ *' É¡ M ¡ $ ¡ ñ ¡ ($z ¡ ¶ R É¡ JB¡$ ¡ ñL¡T¶ 8
/ ¶ R zM¡T¶ é
/
é
ù¡¢*' É¡ M$ ¡ ñL($7zJ¡r
ù¡OJB¡$>ñ @¡¢($zM¡¢
§
8
/ ¶ R zJ¡_TI¶ é
8
¶ R zJ¡_TI¶
(
í
(
íí
Applying Lemmas 3.3 and 3.4, the first term is bounded by
¾
S
ù ¡ $>L($7z ¡ ú
k î ß ¾ \
E¬] \ S ¾u
¶ R z ¡ T¶
Í
î
´ þ î º ÉS ß
ß
îpì ü
F
+
À
S
]
K
§
k î ß À \ \ S À u
V î
î
S
ß
º ß
é
Now we consider the terms of ÍÍ separately. Integration by parts and property (2.14) yield
#% É¡ J;($
¡¢ d >K É¡ J;($ ¡¢ d '
EFO É¡ M($ ¬¡ d
)#% É¡ JB*$7
¡¢ d >K É¡ J;*$ ¡¢ d q É¡ '#EFt ¡¢($ É¡ ; d
ø
¾
S
ç
ç
S
ç;
ú
\O\ ` a b f #Kû
\(­\ S ¾ u Ð
¶ R z ¡ TI¶ §
k î¾ ß
k î
V
î
´ º ÉS ß Ê S
É
É
ß
î
º
þ
îpì ü
/
+eF
/
cb
4b
/
cb
KF
/
f
&b
/
!b
g<
The orthogonality property (2.14) results in
¶jjû ¡ $ ¡ d ¶ ݶjjñ ¡ $ ¡ N
é
é õré
ç
ç1
ú
> 2N` h
&b
)ÿ
db
!b
/
] 1 K ¡¢ d ¶
À
S
S
V \ \ S À u Ð
¶ R zM¡TI¶ §
k î ßÀ
V
´ S ß S æîÊ
ß
º
îpì ü
é
é
Integration by parts (due to continuous discrete pressure) and (2.14) lead to
¶ª ¡]$ É¡ J;' d ¶
¶ª# ¡]$ É¡ J; d ¶ ¶ É¡ # ¡r($ É¡ JB d ¶
È ¾ Õ
(3.10)
Õ
õ
Õ
S
S
ç
ç
ç;
ú
\*\ S ¾ u Ð
¶ R zJ¡_TI¶ §
k î ß¾
V
´ ÿ î º ÉS ß S
É
ß
îpì ü
+eF
+ F
/
KF
KF
H]
] /
&]
]
^] 1 K _] 1 K /
ETNA
Kent State University
etna@mcs.kent.edu
114
G. LUBE, G. RAPIN, AND J. LÖWE
The estimation of the stabilization term is straightforward
¶ ù ¡ É¡ J?$ ¡ ñL($z ¡ é
ù¡] É¡ J?$ ¡ ñL($G É¡ M$ ¡ ñ @' #ù¡]#zJ¡]$7zJ¡'
È
é
é
¾
S
ç
ç;
ú
¶ R z ¡ T¶
\OE]\ S bª` a b f>f i \*\ S ¾ u Ð
k î¾ ß
V
à î
î
´ º ÉS ß Ê S ý þ î
É
ß
îûì ü
À
S
ç
¶ R z ¡ T¶ §
ç;
ÿ
ú
k î À ß \ \ S À u Ð
V
S
S
´ î
ß
º ß Ê
îpì ü
é
é
¶ R z ¡ TI¶ S Í
Í¢Í together with the estimate of
Adding up all inequalities for the estimate of
(3.9) gives the assertion.
C ORROLARY 3.6. Under the assumptions of Theorem 3.5 and the notation of Lemma 3.2,
we obtain
Á
ç
Á
\?­L¡]\
Á K päåªæ
E Á
¶R ¡_TI¶C$
X
X
K
¯
(3.11)
/
+0F
/
KF
F KF
E /
] 21 K ] 1 K < J >
G G
I J
+iE F G
G K
Á
Á
with constants ,
, ¯ and as in Lemma 3.2.
Proof.
¡y
°¡$>@The
¡¢ proof mimics
¡> thepproof
;¡%$#of
@Lemma
¡¢
3.2.
@$¡¢In d equation
ù¡] (3.4),
¡one
$ ¡ É has
$'"¢to
replace
by
and
by
.
ÿ
$
3.4. Parameter design. Now we will calibrate the stabilization parameters î þ î ,
and à î with respect to the local mesh size k î , the polynomial degrees º É and º of the
é
discrete ansatz functions and problem data. The parameters are determined by minimizing
and balancing the terms of the right-hand side of the general a priori error estimation.
Á É
First, equilibrating the þ î -dependent terms in î yields
D
kj
el
k î
\E\ be` a b
þ î
(3.12)
ff i S
º É
î
§
Á É
Á
ÿ
Similarly, equilibration of the terms in î and î é involving à î and î
À ¾
¾ À V
V
$
ÿ
$
k ßî À Ê]ß ¾
k ßî ¾ Ê@ß À
à î
(3.13)
î
S
S
º ß Ê@ß
º ß Ê]ß
l
l
^]
l
]
&]
]
l
yields
where we used º º É Dº . For the following result, we assume that the solution
é
the continuous Oseen problem is sufficiently smooth. Y!ç
ãÉ
º É
º
C ORROLARY 3.7. For equal-order interpolation º
, let ã
é
and
ÿ
k@î
§
à k]î $
ÿ
k@î $
\E\_bª`]þ a?b ff>i S
(3.14)
Ã=î
î
î
S
S
þ
º
º
º
î
]
\
=$#@
ã
é
F5F
+
F
K f
K
] 1
`
]
È
]
Then we obtain, under assumptions of Theorem 3.5,
S V
ç S S V
E
¶R ¡_T¶ S
ú
ç;
k î ß \ \ S u Ð
k î ß \ \ S u Ð
V
\ E\_bª`]a?b ff>i
S
S S
ß
ß
º ß
º ß
î
îpì ü
é
ç S
S
S
ç;
\O\ ` a b f K k î \E\ be` a b ff i @
k î
k î ß \(­\ S u Ð
V
î
î
S
S S
É
ß
º
º
º ßàÊ
h
of
] 1 K
º
1
§
ETNA
Kent State University
etna@mcs.kent.edu
115
LOCAL PROJECTION STABILIZATION FOR INCOMPRESSIBLE FLOW
For inf-sup stable interpolation with º É
ÿ S
ÿ
k î $
(3.15)
î
Ãî
º É
ç
º
é
à $
þ î
º É
U
, we assume ã É
ã
ç
k@î
§
\OE@\tbª` þ a b f>f i S
º É
î
]
Then we obtain, under assumptions of Theorem 3.5,
¾
¾
V
S
S
ç S
E
S
¶e¶ R ¡T¶ S
ç;
\
¦
\
\ ú
ß
ß
k î¾
k î ¾
¾ uÐ
\ E]\ ªb ` a
V
S
S
S
ß
º É ß
º É ß
îpì ü
é
ç S
ç
S
ç;
\O\ ` a b f K k î !\OE@\ be` a b ff i @
k î î
î
S
É
º É
º É
º É º
+
K f
F
1
]
K
F5F
º É and set
é
]
h
`
m
b
î
f
1
I­\ S u Ð
ß
0
¾
S
k î ¾ ß \(­\ S u Ð
V
S
S
É ß Ê
ß
] 1 K
§
_]
This result requires some further
discussion:
¡ us
¡ us
¡ us V
1
For equal-order pairs
and for (inf-sup stable)
s Taylor-Hood pairs
s
V ¡ us
k î
k î
, we obtain the optimal convergence rates
and
, respectively, with respect to k î .
É¡ $ ¡
é in the
Due
¶¶ to the non-optimal convergence order of the interpolation operators
V -norm, these estimates are presumably not optimal with respect to polynomial
degree º É . Let us assume that in Lemma 2.9 there holds
ç
ç;
k ßî \ µ \ u Ð
k î ¶ µ ¡É µ ¶ V u
(3.16)
î
É
ß
º É
º ß
_] n
m
+ n
o]
/ 1
and a similar result in Lemma 2.10 as well. A careful check of the proofs leads to
(3.17)
Ãî
k î
Ã
º
$áÿ
for equal-order pairs with º
S
ÿ
ÿ k î $
(3.18)
î
S
º É
m
ÿ k î
º
î
º É
º
Ãî
$
þ î
þ
\E]\ bª` k a î bªd]ff i
º É
and
é
Ã
l
ç $
þ î
þ
î
\OE]\tbª`]k]
a?bedff>i
º É
ç
for inf-sup stable pairs with º É
. Then the a-priori estimate (3.8) in Theoº
é
rem 3.5 would be optimal with respect to º É and º , too, with the possible exception
é
of the factors depending on É and . The latter reason eventually leads to a noné
optimal parameter design with respect to º É .
The formulas for the stabilization parameters and the error estimates are only asymptotic statements. To the best of our knowledge, there is so far no general concept for
a more precise design of the stabilization parameters (with the possible exception of
one-dimensional problems with constant coefficients).
$7 $'ÿ Unfortunately, this leaves the
practitioner with the problem of choosing þ
. Table 4.1 below might give an
indication of suitable values in our experiments for an academic problem.
1 1wvw w
s
q
^
r
d
q
v
t
u
t
p
l
F
x
y 1 < 1 >
F
z|{ x K
1
y K
R EMARK 3.8. The SUPG parameter
stabilization methods has
¡
¡
þ î in residual-based
äHåeæ
a
i s¾ V s ¾
the typical design þ î
; see [20]. This can¡ be rewritten as
¡
a
i
V
V
äåªæ
s ¾ äåeæ ç
s¾
with the local Reynolds number î
.
þ î
This means that the design of the SUPG-like parameter þ î in (3.17)-(3.18)
is
strongly
ù ¡
simplified for the LPS method due to the symmetric stabilization term
. This choice
0l
}~
1 kq r^q4 u t 1Bw w
y
ETNA
Kent State University
etna@mcs.kent.edu
116
G. LUBE, G. RAPIN, AND J. LÖWE
£
will not cause
problems for locally vanishing as the corresponding stabilization term is
É¡ >£MtH¤ ¡ $ É¡ >£M_¥ ¡
õ
î . Clearly, a proper implementation is required. In
î þ î õ
£
the Stokes
limit
,
the
SUPG-type
stabilization
term given above does not occur, hence
"
îþ
. Regarding the remaining stabilization terms, the PSPG-type term can be omitted
for inf-sup stable elements. As a consequence, no suboptimality occurs in the analysis for the
Stokes limit.
R EMARK 3.9. The corresponding result for the LPS scheme with local projection of the
S
full velocity gradient, see Remark 2.4, leads to the design î Dk]î º É (or î !k@î º É ).
Please note that the error estimates deteriorate if the local projection
divergence terms
¶jjû of the
¡ $ ¡ d ¶
is omitted. Then, the critical term in the proof of Theorem 3.5 is
.
é
l
Zl
?b
3.5. Choice of the discrete
paper [21] presents different variants for the
À
¾
¡ u sspaces.
¡ u s The
¡É
¡
M
ðé using simplicial and hexahedral
choice of the discrete spaces
and ð
elements. There are basically two variants:
¡
¡
A two-level
(formally denoted by
¡ ¡ variant with a suitable refinement ® of ê
ê
® S ).
¡ ¡
® , hence k î
k , with a proper enrichment of
A
variant with ê
¾ u ³´
² s one-level
by using bubble functions.
In the numerical results below, we restrict ourselves to the two-level approach, but the theory also covers the one-level approach. Note that the present analysis covers only the case
of continuous pressure approximation. For san extension
² b s f to discontinuous discrete pressure
V -elements, we refer to [23].
approximation, in particular to the case of
¡
Ê Ê
The discontinuous coarse spaces are defined on the coarser mesh ê
with polynomials
of one degree less. Thus, for hexahedral elements the coarse spaces are given by
s¾
u ´ $
sÀ u ´ §
¡É ¡ V ü
V ü
ð
ðHé
Ê
Ê
m
m
#
For simplicial elements we obtain
ð
¡É ² s¾
Ê
u ´ $
V ü
ðHé
¡ ² sÀ
Ê
u ´ §
V ü
9BS
É A
Obviously,
2.5 is valid for our discrete spaces if the local -projection ò î
91S ë Zm Assumption
¡É ë ð
for the velocity and similarly for the pressure is applied; see [21].
Moreover, for these choices the constants É
in Assumption 2.7 and in (2.16) scale like
Iç
é çG
for simplicial elements and like
for quadrilateral elements in the affine
º É
é
linear case; see [23].
n I
n
4. Numerical results.
4.1. The Oseen problem. A proper calibration of the stabilization parameters requires
careful numerical experiments going beyond the scope of this paper. Some papers validate
the parameter design and the theoretical convergence rates for the Oseen problem
9;:=< >?$>LBA}N?
#EFGHIJKLM )*+"
(4.1)
where #"%$çG S
\C !C
? V $
S
, using the smooth solution
< åeæ ò C V ($ ò C |S & ò C V > $
DC 4C
= V $ 1
S
in in $
$
åªæ= ò C V & ò C S ($
E
and
. The source term and the Dirichlet data follow from . We refer to a study in
[25] of the one-level variant for equal-order pairs with enrichment of the velocity space by
ETNA
Kent State University
etna@mcs.kent.edu
117
LOCAL PROJECTION STABILIZATION FOR INCOMPRESSIBLE FLOW
using bubble functions. The two-level variant with inf-sup stable pairs can be found in [19]
for equal-order and for inf-sup stable pairs; for the latter case, see also [23]. In all these cases,
É¡
9;S
the local -projection is used for the definition of the fluctuation operators õ é .
As an example, some typical results are presented for the two-level variant with S V
and the S S pairs on unstructured, quasi-uniform meshes. More precisely,
the coarse
¡É
¡ "5
ð
é
spaces ð
is constructed as discussed in Subsection
2.2.
Moreover,
we
set
, which
¡ õ
é
id.
The
results
in
Table
4.1
with
the
errors
results
in
full
grad-div-stab
stabilization,
i.e.,
¬ ¡
FH ¡
ñNç"
É
and
for the advection-dominated case
Ê show comparable
é
results for the best variants of S V and S S , although the results for S S are slightly
better due to the better pressure approximation.
~
TABLE 4.1
Two-level LPS scheme: Comparison of different variants of stabilization for problem (4.1) with
pairs and
.
!^2Hok d ÿ
XaoX
þ
0.000
0.056
0.056
0.000
3.162
0.000
0.000
0.056
0.056
0.000
Pair
S V
S S
Ã
0.000
0.562
0.562
0.562
0.000
0.000
0.000
1.000
0.000
5.623
0.000
0.010
0.000
0.000
0.000
0.000
0.018
0.018
0.018
0.018
¶
É ¶V
2.56E-1
1.91E-3
1.91E-3
2.61E-3
1.87E-2
2.38E+1
1.65E-2
9.30E-4
1.77E-3
3.26E-3
É \
\* ¡ \
5.42E-4
6.21E-6
6.20E-6
7.42E-6
7.50E-5
5.35E-2
3.48E-5
2.85E-6
4.18E-6
7.20E-6
2.02E-1
1.82E-4
1.66E-4
1.72E-4
1.56E-2
1.45E+1
9.37E-3
2.14E-4
1.46E-3
2.00E-4
\
\
Xao
and
~é\
2.31E-4
9.08E-5
8.06E-5
8.05E-5
1.08E-4
1.66E+3
6.96E-6
4.31E-6
3.25E-6
7.56E-6
Nevertheless, the importance of the stabilization terms is different. The small-scale
SUPG- and PSPG-type terms are necessary for the equal-order case but not for the inf-sup
stable pair. At least the PSPG-type term can be omitted for the inf-sup stable case. On the
other hand, the divergence-stabilization gives clear improvement for the inf-sup stable case
and some improvement for the equal-order case. Let us remark that the divergence stabilization without local projection has better algebraic properties than its LPS variant.
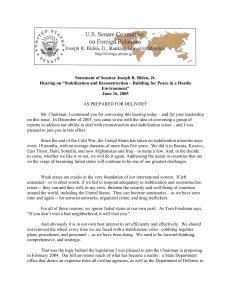
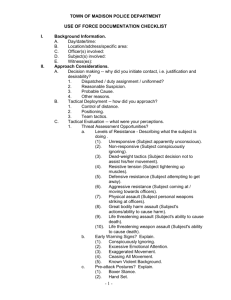
In Figure 4.1, convergence plots are shown for the two-level LPS)
scheme
ç with)optimized
ç"
and
parameters in the diffusion- and advection-dominated cases with
Ê ,
respectively. The numerical convergence rates confirm the theoretical results. Interestingly,
no gain of the better pressure approximation for the S S pair can be observed in the
diffusion-dominated case.
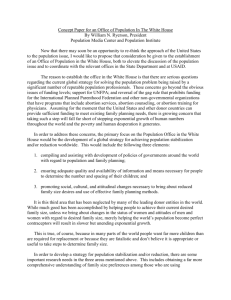
Let us finally check the effect
polynomial degree for inf-sup
Taylor6$ increasing
$ r
ûDçGstable
"
$7K
ç
PM 3%$'of
Hood pairs Ò Ò V with Õ
. This is shown in Figure 4.2 for
,
Ê
Ê
and different values of k . Similar results
are
obtained
(but
not
shown)
for
equal-order
approxPM ç $35$76%$ ]$ 5
imation with Ò Ò -elements with Õ
.
R
!¡ a¢
!¡ ;¢
4.2. Navier-Stokes problem. Finally, we apply the LPS stabilization
to theK
lid-driven
EJ/
~"
cavity
flow
as
a
standard
Navier-Stokes
benchmark
problem
(4.1)
with
,
and
. Homogeneous
Dirichlet
data
are
prescribed
with
the
exception
of
the
upper
part
of
the
Î ç $7" ¯
boundary where
is given. An unstructured quasi-uniform mesh is used together
with the Taylor-Hood pair S V and the equal-order S S pair using the two-level
variant
and à according to our theory and ÿ Î" . In
of LPS stabilization with
scaling
parameter
þ
"
particular, the cases þ
correspond to no stabilization.
Ã
.
ETNA
Kent State University
etna@mcs.kent.edu
118
G. LUBE, G. RAPIN, AND J. LÖWE
−6
Q2Q1, ν = 1, c = 1, LPS
−1
10
Q2Q1, ν = 10 , c = 1, LPS
−1
10
−2
10
−2
−3
10
−4
10
10
−3
10
3/2
error (log)
error (log)
h
10
4/2
−5
h
10
−4
−5
h4/2
10
5/2
−6
−6
10
10
|u−u |
h
|u−u |
h1
−7
10
h1
||u−u ||
h6/2
h 0
||u−u ||
h 0
−7
10
||∇ ⋅ uh||0
||∇ ⋅ uh||0
||p−p ||
h 0
−8
10
||p−p ||
−7
−6.5
−6
−5.5
−5
−4.5
gridsize h (log )
−4
−3.5
h 0
−8
10
−3
−7
−6.5
−6
−5.5
2
−2
10
−3
10
−2
−3
−4
error (log)
10
4/2
h
10
−6
−4
10
−5
h4/2
10
−6
10
10
|u−u |
|u−u |
h1
−7
10
h1
||u−u ||
6/2
h 0
h
−7
10
||∇ ⋅ u||0
||u−u ||
6/2
h
h 0
||∇ ⋅ u||0
||p−p ||
−7
||p−p ||
h 0
−8
10
−3
−6
10
error (log)
−3.5
Q2Q2, ν = 10 , c = 1, LPS
−1
10
10
−5
−4
2
Q2Q2, ν = 1, c = 1, LPS
−1
10
−5
−4.5
gridsize h (log )
−6.5
−6
−5.5
−5
−4.5
gridsize h (log )
−4
−3.5
h 0
−8
10
−3
−7
−6.5
−6
−5.5
2
F IG . 4.1.
−5
−4.5
gridsize h (log )
−4
−3.5
−3
2
-convergence for the Oseen problem with
L
(left) and
!
£
(right) with
.
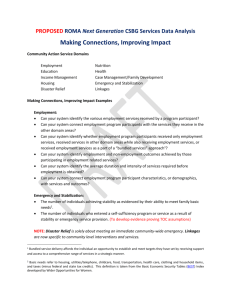
In Figure 4.3, we present typical solution profiles of the velocity for the case of
}~ ¤¢%$'" "" . The results for k V ` for both variants are in excellent agreement with the
reference data in [11], where the stream function-vorticity
formulation of the Navier-Stokes
"ç
problem on very fine meshes with up to ¥
¥ "ç nodes is used. In particular, the boundary
layers are well
even on this quasi-uniform mesh. Moreover, the solution for a coarse
V
resolved
V is in good agreement with the data in [11] away from the boundary layers.
grid with k
The results confirm the previous remarks for the linearized problem of Oseen type. For the
S V element, only the divergence stabilization is necessary whereas for the S S pair
all stabilization terms are important.
Then, we compare in Table 4.2 the positions and values of extrema of the velocity profiles
for different values of ç . The
results for the two-level LPS scheme with the S V pair on
3
the fine mesh with k
are in good agreement
ç 63 with the results in [3, 27]. Moreover,
the LPS
results
on
the
coarser
grid
with
are in good agreement with the case
k
ç 3
. This is verified in k -convergence studies in [19].
k
G$ 7
Finally, we compareÞ in Table 4.3 the position
Ô
ofG$ the7 main vortex and the values
of the streamfunction
. for two values of ç . The
ĪŠand of the vorticity in the
3
results for the two-level LPS scheme with the S V pair on the fine mesh with k
are in very good agreement with the results in [3, 11], but slightly different from the results
in [27]. Studies of k -convergence can be found in [19].
¦ ¢ ¥
}£~
§¦ ¢ ¥
ª
{
g¦
DC¨ 4©
¨
Ǭ
DC¨ !©
¨
}~
¬¦ ¢ ¥
5. Summary. A unified a-priori analysis of stabilized methods via local projection (LPS)
is given for equal-order and inf-sup stable velocity-pressure pairs on isotropic meshes. The
error estimates are comparable to classical residual-based stabilized (RBS) methods. This
shows that only stabilization of the fine scales is necessary. Compared to the RBS methods,
ETNA
Kent State University
etna@mcs.kent.edu
119
LOCAL PROJECTION STABILIZATION FOR INCOMPRESSIBLE FLOW
−1
−2
10
10
h ≈ 1/8
h ≈ 1/16
h ≈ 1/32
−2
10
h ≈ 1/8
h ≈ 1/16
h ≈ 1/32
−4
10
−3
−4
||∇ ⋅u || error (log)
10
−5
10
−6
10
h 0
|u−uh|1 error (log)
10
−6
10
−8
10
−7
10
−10
10
−8
10
−9
10
qd­
2
3
b
´ f
−12
qs®
4
element order Q /Q
É
Ê
É
k
10
5
2
3
k−1
qd­¯ É ´ qk®
element order Q /Q
k
4
5
k−1
−3
10
h ≈ 1/8
h ≈ 1/16
h ≈ 1/32
−4
10
−5
h 0
||p−p || error (log)
10
−6
10
−7
10
−8
10
−9
10
−10
10
−11
10
2
3
qé
´
q®
4
element order Q /Q
Ê é
k
5
k−1
F IG . 4.2. Polynomial convergence for the Oseen problem with
!H£
1
Q2Q1, h=1/16
Q2Q1, h=1/64
Q2Q2, h=1/64
ECG04
0.4
v component of velocity
u component of velocity
0.6
0.5
0.5
0.4
0.9
0.95
1
0
−0.5
0
0.2
0.4
0.6
y−coordinate, (x = 0.5)
´4µX¶µX¬ ·
µXH¸ ²o¹oº
0.8
0.2
0
−0.3
−0.2
−0.4
−0.4
Q2Q1, h=1/16
Q2Q1, h=1/64
Q2Q2, h=1/64
ECG04
−0.5
0.9
−0.6
1
0
0.95
0.2
1
0.4
0.6
x−coordinate, (y = 0.5)
X°ao±X³ ²Hkoo ´!µ«H¸ o²o¹Hk¶µ«H¸ H!»Hk·
µ«
F IG . 4.3. Lid driven-cavity problem with
pair with
and
and
for fixed .
0.8
: Cross-sections of the discrete solutions for
pair with
.
1
o
the design of the stabilization parameters is much simpler for LPS schemes as the strong
coupling of velocity and pressure in the stabilization terms does not occur.
Numerical results from the literature and our own experiments confirm both, the design
of the stabilization terms and the theoretical convergence rates. A major difference between
equal-order pairs and inf-sup stable pairs is that LPS-stabilization is always necessary for
equal-order pairs. For inf-sup stable pairs, the necessity of stabilization is seemingly much
ETNA
Kent State University
etna@mcs.kent.edu
120
G. LUBE, G. RAPIN, AND J. LÖWE
Xao7¿¾ÀÄÃ4aÁoº 4?!¹o @;;°7¿± ¾³4aºo²o¹ ¿À4aºo²o¹
C]ÞLÅoÆ µ Þ ÄªÅ
Þ ÄªÅ
L
© Þ
µ ÞLÅoÆ
ÄeÅ
¿ ¼Ã4aHºo¸ ²o² ¹
TABLE 4.2
: Maxima and minima on cross-sections
Lid driven-cavity problem for different values of
; a) LPS
, b) LPS
, c)
(in [12]), d)
[27]), e) spectral method with
(in [3]).
½ §H¸ ²
}~
100
1000
7500
a)
b)
d)
e)
a)
b)
d)
e)
a)
b)
c)
d)
0.21399
0.21404
0.21411
0.21404
0.38512
0.38857
0.39009
0.38857
0.43940
0.45478
0.43590
0.46413
0.45703
0.45703
0.45898
0.4581
0.17578
0.17188
0.16992
0.1717
0.07031
0.06250
0.0625
0.06445
0.17951
0.17957
0.17946
0.17957
0.37404
0.37692
0.37847
0.37695
0.43749
0.45836
0.44030
0.47129
0.23828
0.23828
0.23633
0.2370
0.16016
0.15625
0.15820
0.1578
0.07813
0.06641
0.0703
0.06836
Xaa¿°¾ÃÄϱ 4aÁo4º ?!¹o
ª Þ ÄªÅ Ôɨ
C]Þ
0.25376
0.25378
0.25391
0.25380
0.52295
0.52701
0.52839
0.52708
0.56560
0.58043
0.55216
0.58878
and
(in
ĪÅ
0.80859
0.80859
0.81055
0.8104
0.90625
0.91016
0.90820
0.9092
0.96484
0.96484
0.9609
0.96289
TABLE 4.3
Lid driven-cavity problem for different values of
: Position of center of main vortex and values of stream
function
and of vorticity ; a) LPS
, b) LPS
, c)
(in
(in [27]), e) spectral method with
(in [3]).
[11]), d)
ÇÉÈÉÊÌË 4aºo²o¹
Í8Î
}~
1000
7500
a)
b)
c)
d)
e)
a)
b)
c)
d)
0.118310
0.118936
0.118942
0.1193
0.118937
0.119315
0.122386
0.122386
0.1253
Xaa¿¾Ã4aºo²o¹ ¿Ã4aºo²o¹
CR¨
©¨
2.06527
2.06772
2.06721
–
2.06775
1.86210
1.92691
1.92697
–
0.5314
0.5308
0.5300
0.5313
0.5308
0.5192
0.5122
0.5133
0.5177
0.5676
0.5651
0.5650
0.5664
0.5652
0.5293
0.5321
0.5317
0.5313
less pronounced as for equal-order pairs. In particular, the grad-div stabilization is much
more important than the fine-scale SUPG stabilization. Moreover, the fine-scale PSPG part
seems to be superfluous.
Appendix.
L EMMA A.1.
É¡ A m 2.7
¡ Let Assumption
¡ u s ¾ be satisfied. Then there are interpolation operators
¢¡ É A UJ V m
, such that
¿ and
µ ¡ É µ $'G¡ d "ËLG¡ P
¡É $Ë µûP¬U V ($
(A.1)
ð
ç
\ µ ¡ É µ \ u k@î ¶ µ ¡ É µ ¶ V u
ç;
k ßî \ µ \ u Ð $
(A.2)
î
î
S
É
ß
º É
º Éß
µûPU W UM V , and
for all
ß ¬ É¡ $ ¡ d "Ë ¡ PJR ¡É T $Ë@ PJ $
0
(A.3)
ð
ç
\( É¡ 1\ u k@î ¶ É¡ 1¶ u
ç;
k ßî \(1\ u Ð $
V î
(A.4)
î
S
É
ß
º É
º Éß
/
/
/ ;3
/
e+ + 53
1
1
ETNA
Kent State University
etna@mcs.kent.edu
121
LOCAL PROJECTION STABILIZATION FOR INCOMPRESSIBLE FLOW
76
P!R U ÷T W ë P
ç
Dç
Ô
AC/Ö
Ô
¡
ê
¯ is a
, and È)ãÈ º É
. Here î
for all
ß ëá0 P
¯ î
¡,
ê
neighborhood of
.
Proof. We follow the lines of the proof of [21, Theorem 2.2], but we take into account
the dependency of the constants on the polynomial
constant É .
¡ñA ¡ order
ë inf-sup
Ü
ë m and ¡É the
Define the linear continuous operator
¿
ð
by
Ë µ ¡P ¡ ë ($7 ¡P
¡ µ ¡ $7 ¡ A}) µ ¡ $' ¡ $
¡É ë §
¿
ð
î
¡
The
Theorem yields
is¡]an
¾ b f thatµ ¡ P zM
u Assumption
zM¡] ë Closed-Range
\ µ ¡]\ via
\ ¡ µ ¡@\ ´2.7
ë isomorphism
zJ¡]from
ë ¡É ë Ü
onto ð
with É z ¡ ë î BÈ AC
,
,
where
Ø
î
¡ ª$ GÕ
is the orthogonal
complement
ofV with respect to
î . ¡ µ $ë P
ë
P
¡
µÎP!UM
be arbitrary. Then, there exists a unique
ê
Let
and
V \ µ ¡ u s¾ µ \ u
z ¡ ë \ ¡ µ $ ë O\
È
Í
with
î , such that
É
ÑÐ
4Ó
Ò
4Ó
Õ
Ñ Ð ¡ Õ ¡% µ $ ë
(A.5)
Ð
($7¡
Ò
.Ô Ð
M
Õ
¡] µ ($7¡r
î
A J
U V Ð
~ Ð
N µ Õ
Í
¡ u s ¾ µ $7¡¢
The approximation property in the
Õ
O¶ S u
V î
¶ ¡ µ $ ë
È
ú
2Ñ2×_Ö Ø 1
Ñ
+ ¡] ë
$ÌËLG¡ P
î
ð
¡É ë
§
¡
ë
P
¢¡ É u µ AC
,
ê
, by
î
, we can define a global operator
¢¡ É
(2.3), the operator
satisfies for
ç;
Á
ç
S
É ÑÑ×oÖ Ø 1
ú
S
k ¯ ß \ µ \ S u Ð¢Ñ §
S
ß
´ º Éß
UV
-seminorm follows from inequality (2.2),
S
V \ ¡ µ $ ë O\ S u
S \ µ ¡É u s ¾ µ \ S u $
S
à ÄeÅÆ ú
¯
à ĪÅÆ º É k ¯ Ê
º É k ¯Ê
Í
¯ È
Ñ
É
Ñ
´
´
2×_Ö Ø 1 `
Õ
and using the approximation property (2.3),
¶ µ ¡ É µ ¶ S u )¶ µ ¡ É u s¾ µ ¡% µ $ ë O¶ S u
V î
V î È
Í
V
ç
ÃÄeÅÆ
k ßàî Ê ¶ µ ¶ u Ð §
S
S
ɺ
ß
É
º ÉßàÊ
!Ó
Õ
m
5¡ É u
¿
Now,
¡ É u s¾ µ we
O¶ define
¡]local
µ $ ë operators
¡î
Í
î
. Since ê
is a partition of ¢¡ É µ O¶
AC ¢¡ É u µ
¡
¢¡ É A UM V m
¿ by
. Due to
î
ç
Îç
& P ¡ µpP¬UM V îW U *$
ÈZã¦È º É
and all
® ,
ß S
ç
\ µ ¡ É µ \ S u
ç;
\ µ ¡ É u s¾ µ \ S u
(A.6)
Í
î È
î È
É
4Ó
Õ
3]¶ µ 1
Í
¡ É u s¾ µ ¶ SV u
î
Õ
+3¶ ¡ µ $ ë
¶ S u
V î
Finally, the orthogonality property (A.1) is a consequence of (A.5).
Ù
Ù
REFERENCES
[1] I. B ABU ŠKA AND M. S URI , The and - versions of the finite element method, basic principles and properties, SIAM Rev., 36 (1994), pp. 578–632.
[2] Y. B AZILEVS , V. C ALO , J. C OTTRELL , T. H UGHES , A. R EALI , AND G. S COVAZZI , Variational multiscale
residual-based turbulence modeling for large eddy simulation of incompressible flows, Comput. Methods
Appl. Mech. Engrg., 197 (2007), pp. 173–201.
[3] O. B OTELLA , R. P EYRET, AND Y. D AOQI , Benchmark spectral results on the lid-driven cavity flow, Comput.
& Fluids, 27 (1998), pp. 421–433.
[4] M. B RAACK AND E. B URMAN , Local projection stabilization for the Oseen problem and its interpretation
as a variational multiscale method, SIAM J. Numer. Anal., 43 (2006), pp. 2544–2566.
[5] M. B RAACK , E. B URMAN , V. J OHN , AND G. L UBE , Stabilized finite element methods for the generalized
Oseen problem, Comput. Methods Appl. Mech. Engrg., 196 (2007), pp. 853–866.
[6] M. B RAACK AND T. R ICHTER , Solutions of 3D Navier-Stokes benchmark problems with adaptive finite
elemens, Comput. & Fluids, 35 (2006), pp. 372–392.
ETNA
Kent State University
etna@mcs.kent.edu
122
G. LUBE, G. RAPIN, AND J. LÖWE
[7] A. B ROOKS AND T. H UGHES , Streamline upwind/Petrov-Galerkin formulations for convection dominated
flows with particular emphasis on the incompressible Navier-Stokes equations, Comput. Methods Appl.
Mech. Engrg., 32 (1982), pp. 199–259.
[8] E. B URMANN AND P. H ANSBO , Edge stabilization for Galerkin approximations of convection-diffusion problems, Comput. Methods Appl. Mech. Engrg., 193 (2004), pp. 1437–1453.
[9] R. C ODINA , Analysis of a stabilized finite element approximation of the Oseen equations using orthogonal
subscales, Appl. Numer. Math., 58 (2008), pp. 264–283.
[10] C. D OHRMANN AND P. B OCHEV , A stabilized finite element method for the Stokes problem based on polynomial pressure projections, Internat. J. Numer. Methods Fluids, 46 (2004), pp. 183–201.
[11] E. E RTURK , T. C. C ORKE , AND C. G OKCOL , Numerical solutions of 2-D steady incompressible driven
cavity flow at high Reynolds numbers, Internat. J. Numer. Methods Fluids, 48 (2005), pp. 747–774.
[12] U. G HIA , K. G HIA , AND C. S HIN , High-Re solutions for incompressible flow using the Navier-Stokes
equtions and a multigrid method, J. Comput. Phys., 48 (1982), pp. 387–411.
[13] V. G RAVEMEIER , The variational multiscale method for laminar and turbulent flow, Arch. Comput. Methods
Engrg., 13 (2006), pp. 249–324.
[14] J.-L. G UERMOND , Stabilization of Galerkin approximations of transport equations by subgrid modelling,
M2AN Math. Model. Numer. Anal., 33 (1999), pp. 1293–1316.
[15] T. H UGHES , L. M AZZEI , AND K. JANSSEN , Large eddy simulation and the variational multiscale method,
Comput. Vis. Sci., 3 (2000), pp. 47–59.
[16] V. J OHN AND S. K AYA , A finite element variational multiscale method for the Navier-Stokes equations, SIAM
J. Sci. Comput., 26 (2005), pp. 1485–1503.
[17] V. J OHN , G. M ATTHIES , AND J. R ANG , A comparison of time-discretization/linearization approaches for
the incompressible Navier-Stokes equations, Comput. Meths. Appl. Mech. Engrg., 195 (2006), pp. 5995–
6010.
[18] C. J OHNSON AND J. S ARANEN , Streamline diffusion methods for the incompressible Euler and Navier-Stokes
equations, Math. Comp., 47 (1986), pp. 1–18.
[19] J. L ÖWE , Local projection stabilization for incompressible flow problems (in German), Master Thesis, Department of Mathematics, Georg-August University Göttingen, 2008.
[20] G. L UBE AND G. R APIN , Residual-based stabilized higher-order FEM for a generalized Oseen problem,
Math. Models Methods Appl. Sci., 16 (2006), pp. 949–966.
[21] G. M ATTHIES , P. S KRZYPACZ , AND L. T OBISKA , A unified convergence analysis for local projection stabilizations applied to the Oseen problem, M2AN Math. Model. Numer. Anal., 41 (2007), pp. 713–742.
[22] R. PAWLOWSKI , J. S HADID , J. S IMONIS , AND H. WALKER , Globalization techniques for Newton-Krylov
methods and applications to the fully coupled solution of the Navier-Stokes equations, SIAM Rev., 48
(2006), pp. 700–721.
[23] G. R APIN AND J. L ÖWE , Local projection stabilizations for inf-sup stable finite elements applied to the Oseen
problem, submitted, 2007.
[24] H.-G. R OOS , M. S TYNES , AND L. T OBISKA , Numerical Methods for Singularly Perturbed Differential
Equations, Springer, Berlin, 1996.
[25] S. S CHMALJOHANN , Local projection stabilization for the Oseen problem (in German), Master Thesis, Department of Mathematics, Ruhr-Universität Bochum, 2007.
[26] L. S COTT AND S. Z HANG , Finite element interpolation of nonsmooth functions satisfying boundary conditions, Math. Comp., 54 (1990), pp. 483–493.
[27] L. Z HANG , A second-order upwinding finite difference scheme for the steady Navier-Stokes equations in
primitive variables in a driven cavity with a multigrid solver, M2AN Math. Model. Numer. Anal., 24
(1990), pp. 133–150.
 0
0
advertisement

Download
advertisement
Add this document to collection(s)
You can add this document to your study collection(s)
Sign in Available only to authorized usersAdd this document to saved
You can add this document to your saved list
Sign in Available only to authorized users