ETNA
advertisement

ETNA
Electronic Transactions on Numerical Analysis.
Volume 26, pp. 299-311, 2007.
Copyright 2007, Kent State University.
ISSN 1068-9613.
Kent State University
etna@mcs.kent.edu
ITERATIVE METHODS FOR SOLVING THE DUAL FORMULATION
ARISING FROM IMAGE RESTORATION
TONY F. CHAN , KE CHEN , AND JAMYLLE L. CARTER
Abstract. Many variational models for image denoising restoration are formulated in primal variables that
are directly linked to the solution to be restored. If the total variation related semi-norm is used in the models,
one consequence is that extra regularization is needed to remedy the highly non-smooth and oscillatory coefficients
for effective numerical solution. The dual formulation was often used to study theoretical properties of a primal
formulation. However as a model, this formulation also offers some advantages over the primal formulation in
dealing with the above mentioned oscillation and non-smoothness. This paper presents some preliminary work on
speeding up the Chambolle method [J. Math. Imaging Vision, 20 (2004), pp. 89–97] for solving the dual formulation.
Following a convergence rate analysis of this method, we first show why the nonlinear multigrid method encounters
some difficulties in achieving convergence. Then we propose a modified smoother for the multigrid method to enable
it to achieve convergence in solving a regularized Chambolle formulation. Finally, we propose a linearized primaldual iterative method as an alternative stand-alone approach to solve the dual formulation without regularization.
Numerical results are presented to show that the proposed methods are much faster than the Chambolle method.
Key words. image restoration, nonlinear partial differential equations, singularity, nonlinear iterations, Fourier
analysis, multigrid method
AMS subject classifications. 68U10, 65F10, 65K10
1. Introduction. Image restoration is the most basic problem in the long list of image
processing problems. Often such restored images are used for further tasks such as image
segmentation and matching [1, 11].
The best-known model for denoising is the following primal formulation by RudinOsher-Fatemi ROF [18]
(1.1)
!#"%$'&)(*&)+-,
.10 of interest to us
/
!243-5 76 89
! ,
. :
1
or its Euler-Lagrange form for the denoising case
(1.2)
<;>= $ "
7?
.
@ $A 8 $B
C;D=2EGFE defines the total variation (TV) of function . In practice,
IH only a discrete quantity
K
L
8
N
!
N
O .J: ; to allow generality, a
will be available. In (1.2), one $ assumes that
replacement equation with
for some
.4M
: may be considered,
!2>3G5 LP6 89!
S
(1.3)
.C:RQ
where
is the observed image and is our desired image (with homogeneous
Neumann boundary conditions) to be restored. Here and in (1.1), the term with
August 3, 2006. Accepted for publication May 11, 2007. Recommended by R. Plemmons.
Received
Department of Mathematics, University of California, Los Angeles, CA 90095-1555,
USA
(chan@math.ucla.edu). This work is supported in part by the Office of Naval Research ONR N0001403-1-0888 and ONR N00014-06-1-0345, and by the National Institutes of Health NIH U54-RR021813.
Department of Mathematical Sciences, University of Liverpool, Peach Street, Liverpool L69 7ZL,
UK (k.chen@liverpool.ac.uk).
This work is supported in part by the UK Leverhulme Trust
RF/9/RFG/2005/0482. (For correspondence).
Department of Mathematics, San Francisco State University, 1600 Holloway Ave, San Francisco, CA 94132,
USA (jlc@sfsu.edu).
299
ETNA
Kent State University
etna@mcs.kent.edu
300
T. F. CHAN, K. CHEN AND J. L. CARTER
Other non-minimization models may be proposed directly in the form of a differential equation, e.g., the Perona-Malik [17] model for the same denoising problem takes the form
.
\( ,]+G, U " (\,]+G, "
: .
T 43WV X "Y*Z[,
TGU .
X
where
,
, and the nonlinear diffusive coefficient is designed
to restore sharp edges in . It turns out that these two kinds of models are closely related
[13]; see also [9, 19] for more sophisticated models than ROF [18] for denoising. Here we
are mainly concerned with the ROF model.
There exist many numerical methods for solving both (1.1) and (1.2); see [6, 7, 8] for
detailed surveys and the references therein. Here we shall address the question of how to
solve the dual equation [5] (details are discussed in the next section):
! "`#"ab "`#"c
,
div _^
div _^
e
^
_
d
f
h
g
1
.
:
, "
Pwhere
9 ^i.j
" lkPm k $ is the dual variable and the restored solution will be given by .
div _^ . The clear advantage of the dualN formulation (1.4) over the primal equation (1.3)
(1.4)
is that no such extra regularizing parameter is needed and the dual equation appears more
amenable—however, despite the appearance, as we shall see, the latter equation is deceptively
challenging as far as finding efficient solvers is concerned. There exist few studies of this dual
equation. In [16], a non-smooth Newton method is considered but the achieved convergence
is not yet quadratic. A related dual problem (for a different but slightly easier functional than
the ROF model) has been studied recently in [14].
2. Review of the dual and related formulations. Casting the primal formulation (1.2)
into a dual formulation is a main approach used to study the theoretical properties of . Here
our aim is to address methods of solving the dual formulations effectively. We first review
some previous studies and then present their connections. Although equation (1.4) is commonly known as the Chambolle’s dual formulation, three other papers [4, 10, 15] are closely
connected to this formulation. We now review their connections for readers’ convenience.
From Meyer’s G-space theory [15], the solution to model (1.2) lies in the G-space, i.e.,
9`;on
[s s
, (w,Y+x" y3z T Ar{ (\,]+x"\ T B}{ $ (\,]+x"~, { , { $ ;[,
ut1v q
D
.
r
p
q
q
.
.
m|
m
z
s s
{ ,{ $"
"
(\ ,Y+xm " and
{ $ q { $$ is defined as the lower bound of all ? norms of the
where { .
function . Therefore it is valid to assume that
.yM m
h
(2.1)
.
^
for some ; it turns out that such a parameter is precisely
to coincide with [4, 5].
Upon introducing the dual variable to replace the TV-term by applying the equality
^ 3
r
. K m ^
to the ROF model (1.1) and interchanging the and |
e!2 ,
.
^
4
3 Y" I y
3 " $ &)(*&)+
^
Q
| m ^
and then she proposed to numerically solve
(2.2)
, Carter [4] derived (as in (2.1))
ETNA
Kent State University
etna@mcs.kent.edu
ITERATIVE METHODS FOR THE DUAL FORMULATION FROM IMAGE RESTORATION
301
Various unilevel (optimization) relaxation methods are considered for solving (2.2) in [4]. It
was not clear which method comes out as more robust than others for (2.2).
In order to solve (1.1), Chambolle [5] starts by looking for the projection
div
, with
in mind, from
#"
#"
.
G sc
_^
.
"!Gs $$ ,
# P ,#"~,
div _^
(2.3)
^ df g
"$ "$
@
where ^ d_f g .
_um d_f g _ $ df g . It remains to solve the unconstrained KKT problem
u "K`#" 8
div ^
df g d_f g ^ d_f g .:xQ O $ $$
>
df g "2: , ^ed_f g .4M k m k . or d_f g.b: , ^ed_f g t , Chambolle [5]
Recognizing
either
finds d_f gh.
the dual formulation in the form
divy_5 ^ w d"f g and" presents
" "
,
6
div _^
^ d_f g .1:
(2.4)
div _^
d_f g
d_f g
,#"
or at each pixel _
$
$
$
$ $
$
¡¢¢ T $ T $ $ T
kT $ m T ( k T + T ( .4¥ 5 T T ( k $ m T T ( k T +$ TT (¦6 5 T T + k $ $ T T + kT ( m TT +6 kKm ,
(
£ $
¢¢ T $ T $ § T
5 T $ ( kK$ m T ( $ k +$ ¨ T (6 $ 5 T $ + k $ $ T + $ kP( m ¨ T +6 $ $
¤ +k $
+
(
+
K
k
m
T T
T . ¥ T
T T
T
T T
T k Q
T
T
"
e
Using a semi-implicit time-marching scheme, the so-called Chambolle method [5] proposes
to solve the semi-implicit scheme
(2.5)
or
^d©«fª~g ¬ m%­ ®^ d©«fª g ­ . 5 div _^ ­ "K " 6 div _^ ­ "2 " ^ ©«ª~¬ mY­
©«ª
©«ª
¯
_d f g _d f g
d f g
­ ¯ div ^ ©«ª ­ "° "
«
©
ª
^
d
f
g
^ d©«fªcg ¬ m%­ . ¯ div _^ ­ " " d_f g Q
df g
©«ª
It is the purpose of this paper to address alternative methods for solving (2.4).
2.1. Equivalence of the Carter formulation to the Chambolle formulation. To relate
(2.2) to (2.3), we change the sign of the functional in (2.2) to introduce the equivalent
problem and neglect the last term (not depending on ),
^
8
C± $ y
3 Y" $²` >
3 "%W³&)(*&)+
µ y3 ![" $ `[$~¶K&W(G&W+-,
P « ´K « ^
^
.
^
m
m
which is clearly equivalent to the following problem:
K
s·3 `
-s $$ ,
^
# ^
Q
This is in turn the same as the Chambolle equation (2.3), so, following the same argument,
we arrive at
5
div ^
" " 6 " "
div _^ ^<.:xQ
ETNA
Kent State University
etna@mcs.kent.edu
302
T. F. CHAN, K. CHEN AND J. L. CARTER
2.2. Equivalence of the primal-dual method [10] to the Chambolle formulation. To
solve (1.3), Chan-Golub-Mulet [10] proposed the primal-dual formulation
43 9! ,
$
k N¹ .: ,
(2.6)
k M
.:
2, "
º $ 2N
N!O k after introducing
K inN (1.3) the dual variable by k¦. M
in two variables
for
: GInH fact, when
some small .
,
equation
(2.6)
is
still
valid
and
is
equivalent
. .:
(1.2) when .1: so we may let ^<. k and rewrite (2.6), for the purpose of modeling
to
, as
9! ,
¸ div _^ ®"\K8»
.1: ,
(2.7)
^
.1: "
°3
e^
!. div _^ " . One can eliminate in the second equation using the
where one observes
first equation, i.e. .
2®
"Y"'l w div _^ ,"Y"to derive
, that
"|[" ¹ 2®
"Y"
,
^ div _^
div _^ .C: or div _^
div _ ^ ^·.C:
¸
which is evidently the same as the Chambolle formulation (2.4) after scaling by .
3. Nonlinear multigrid for the Chambolle’s dual formulation. We now turn to the
main aim of this paper on developing a multigrid algorithm for the Chambolle formulation
(2.4):
u "K`#" div ^
df g
" "
^ df gu.:xQ
div _^
df g
It turns out that this equation cannot be easily solved by a multigrid method as shown below.
Simple smoothers such as Jacobi and Gauss-Seidel do not work; the experts [3] are unfortunately not surprised about this as (2.4) is degenerate. Then in the next section, after some
analysis, we shall present alternative algorithms.
To proceed, it is convenient to denote the discretized version of this equation in the
operator notation by
¼
,
" , " $ , , " E mcE ½9, m².1
" : , $ " $ , , $ " E E Z¿¾
$
where ½ m . l k m m f m _k m m f Q Q'Q lk m f lk
m f m lk )m Âf Q$ Q' Q l k f denotes our , so-$
=EGkPFm E k
lution on the finest level with À»Á`À pixels. Let À .
. We remark;that
¬
will have : Dirichlet boundary conditions so we shall assume the given image
is
, ]ÄR, Let,Åa standard
embedded in a larger domain having a zero boundary condition at all sides.
Ç levels à .
coarsening strategy be used to generate a sequence of $'coarse
QQ'Q with the
|
Â
Ä
$
containing À
pixels with À
so that the coarsest level has
à th level
Æ
Á
À
.
¬
ª
ª ªdenote a level
À Â . . . Similarly
¼ Ã ª discretization of (2.4) by
ª ½ ª .:xQ
(3.1)
V
We use the standard nonlinear multilevel algorithm by Brandt [2], as detailed in Chen [12,
Alg. 6.2.8].
Start from an initial guess
. Assume we have set up these multigrid parameters:
— pre-smoothing steps on each level (before restriction)
— post-smoothing steps on each level (after interpolation)
— multigrid cycles on each level or the cycling pattern (here
).
Èm
È $
½m
Ã
Ã
Ã
. ETNA
Kent State University
etna@mcs.kent.edu
ITERATIVE METHODS FOR THE DUAL FORMULATION FROM IMAGE RESTORATION
A LGORITHM 3.1 (Nonlinear Multigrid).
1. Based on the current approximation
nonlinear multigrid, use for times
Ê
½ m
É
ËÍÌDÎ
303
Ê
to equation (3.1), to do steps of a -cycling
,{ ,"
_½ m m Q
,{ , "
ËÍÌDofÎ a -cycling nonlinear multigrid NMG _½ ª ª Ã proceeds as follows
2. One step
, { , "Ï
_½ , ª ª Ã
,¼
{
if à .
then
&[Ð for ½  accurately  ½  . Â
— Solve on level
Ï
, { "~,
else, on level à ,
— Pre-smoothing ½
.ª ѲÒ'Ó rxÔŪ ¼ Õ _½ ª ª ¼ m
,
{ ½ ª~¬ m.Ö "\ª~ ¬ ½ ª
— Restrict to{ the coarse grid,
m
ª
— Compute
m
1
.
Ö
½
~
m
½
m
ª~ ¬ solution
ª Ã ª , { ª as ½ ×, ª~ ¬ m.C"~, ª~½ ¬ m ,
ªªc¬ on level
— Set the initial
"-,
— Implement steps of NMG, ½ ×
m ª~¬ m 8Ã Ù ª~¬ ªc¬ ~
ª
¬
,
~
"
,
{
— Add the residualÏ correction ½
×
Ø
.
½
½
m
½
m
ª m
ª~¬
— Post-smoothing ½
.ª 1ÑÒ'Ó r ÔYª ª Ú _½ ª ª ª ª~¬ ª~¬
,{ , "
end if Ã
end one step of NMG ½
ª ª Ã Q
Ù the usual choice of the restriction operator Ö ¼ ª~¬ m as the simple injection
Here we make
{ to implement
and operator, { " ª m as the bilinear interpolation. It remains to ªdiscuss how
ѲÒ'Ó r Ôª ½ ª ª ª~¬ which denotes a relaxation method applying to ª ½ ª . ª on level à for È
steps.
Some experiments conducted on relaxation methods show that the following methods are
not suitable smoothers: point-wise Jacobi, Gauss-Seidel and the
block Jacobi method.
The natural choice appears to use the Chambolle iterations (2.5).
Take
and use
iterations on the coarsest level . We found that the nonlinear Algorithm 3.1 fails to converge quickly. To exclude the possibility of
div
being small or zero, we considered modifying the Chambolle iteration (2.5) to
Èm . È$ C
. Û
:W:
Á
"2 "
­
^ ©¿ª
­ 5}
Y
m
­
,
" " 6 ØÜ "K " $ 8N
¿
©
~
ª
¬
«
©
ª
^
^
d
f
g
_
d
f
g
Y
m
­
­
­
(3.2)
.
div ^ ©¿ª
¯
div _^ ©«ª
d_f g ^ d_©«fª~g ¬
d_f g
N ÇGÝ
N
N We show
ÇGÝ test
where .
were observed.
: is used. Again only minor improvements
results in Figs. 3.1 and 3.2, where the top plots use .1: and theN bottom .
: . Clearly
there should be reasons why Algorithm 3.1 converges slowly for .1: .
4. Convergence rate analysis and modified algorithms. We first use Fourier analysis
to gain some insight into the behavior of the Chambolle iterations and the associated Algorithm 3.1. Then this analysis is used to assist us to propose alternative algorithms that would
converge.
4.1. Fourier analysis. Recall that the local Fourier analysis (LFA) aims to measure
the largest amplification factor in a relaxation scheme [2, 12, 20]. Let the general Fourier
component be
(ß
+à
Þ f L (Rß},]+Wà" .1Ò á 5 â ã â L ã 6 C
. Ò áoä
cÊ >
Naå ,
À
À æ
ETNA
Kent State University
etna@mcs.kent.edu
304
T. F. CHAN, K. CHEN AND J. L. CARTER
Residual=3.9e+0
beta=0
Prob = 1
20
20
20
40
40
40
60
60
60
80
80
80
100
100
120
100
120
20 40 60 80 100120
True image
120
20 40 60 80 100120
Noisy z
20 40 60 80 100120
MG restored u
Residual=3.9e+0
beta=e−3
Prob = 1
20
20
20
40
40
40
60
60
60
80
80
80
100
100
120
100
120
20 40 60 80 100120
True image
ç
120
20 40 60 80 100120
Noisy z
20 40 60 80 100120
MG restored u
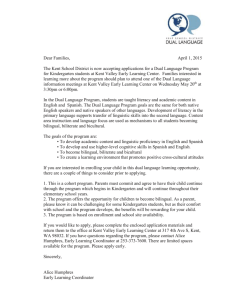
F IG . 3.1. Test example to show the slow convergence of the standard Algorithm 3.1, with the left, the center
and the right plots displaying respectively the true image, the noisy image and the restored image by
cycles of
and the residuals
.
MG. Here
êëì~é
ècé
íÅî ïRð2ëí î ïñðÅòWó ëÉô}õ ö
Residual=3.3e+0
beta=0
Prob = 2
20
20
20
40
40
40
60
60
60
80
80
80
100
100
120
100
120
20 40 60 80 100120
True image
120
20 40 60 80 100120
Noisy z
20 40 60 80 100120
MG restored u
Residual=3.3e+0
beta=e−3
Prob = 2
20
20
20
40
40
40
60
60
60
80
80
80
100
100
120
100
120
20 40 60 80 100120
True image
ì
120
20 40 60 80 100120
Noisy z
20 40 60 80 100120
MG restored u
F IG . 3.2. Test example to show the slow convergence of the standard Algorithm 3.1, with the left, the center
cycles of
and the right plots displaying respectively the true image, the noisy image and the restored image by
MG. Here
and the residuals
êëÉècé
íÅî ïRð2ëí î ïñð òWó ëÉô}õ ô
ècé
ETNA
Kent State University
etna@mcs.kent.edu
ITERATIVE METHODS FOR THE DUAL FORMULATION FROM IMAGE RESTORATION
305
º the, L local N errorº functions
;V , Z by ÷ m©«ª ­ .økKm k m ©«ª ­ and ÷ $©«ª ­ .øk $ k $ «© ª ­ . Here
and define
. Then LFA involves expanding
â . À â . EWù $ À
EWù $
"
x
(
ß
Y
,
W
+
e
à
~
"
,
" L L (xß},Y+Wàe"
L
L
ú
ú
÷ m©«ª ­ . L)û Ç E)ù $ ü m ©«ª ­ f Þ f ÷ $©«ª ­ . L)û Ç E)ù $ ü $ ©«ª ­ f Þ f f
f
Lý LG"
r
L
in Fourier components. We shall first estimate the maximum spectral radius
f þ f
where þ f , of size Á , denotes the amplification matrix for our smoothing method for the
dual system:
ÿ
ÿ
"mY­ L
" L
L
_ü $m ©«ª~¬ mY­ " f L .Cþ f _ü $m ©«ª ­­ " f L Q
_ü ©«ª~¬ f
_ü ©«ª f
, $
Consider the Chambolle smoothing iterations with a view to specify ü m ü :
¡¢¢
,
k m ©¿ª~¬ mY­ k m ©«ª ­ . T T ( T kT ( m ©«ª ­ T k T +$ ©«ª ­ Y
m
­
k m ©«ª~¬
¯
£
¢¢ $ mY­ $ ­ T T ­ T $ ­ (4.1)
¤ k²©¿ª~¬
k²©«ª . T + k²T ( m ©«ª
k²T + ©¿ª k $ ©«ªc¬ m%­ ,
¯
Ü 5 A ÕA ÚB " 6 $ >5 B AÕ ÚB " 6 $
where
.
will be ‘frozen’
locally to implement the Fourier analysis [2]. The finite difference discretization takes the
form
" "
"
"
"
¢ lk m ©¿ª~¬ Ym ­ d f g _k m ©«ª ­ d f g . _k m ©«ª ­ d ¬ m f g _k m ©«ª ã ­ $ d Ç m f g _k m ©«ª ­ df g
¢¢
¯
lk $ ©«ª ­ " d m f g lk $ ©«ª ­ " df g Ç m $ _k $ ©«ª ­ " df g _k $ ©«ª ­ " d m f g Ç m
¢¢
ã
¬
¢¢
X A¬ ¬ ,mY­
£
" $ ­"
" k m ©«ª~¬ $ ­ " Ç $ ­ "
(4.2) ¢¢
$
$
Y
m
­
­
¢¢ lk²©¿ª~¬ df g ¯ _k²©«ª df g . _k²" ©«ª d_f g ¬ m _k²" ©«ª ã $ d_f g m _" k²©«ª df g "
¢¢
lk²m ©«ª ­ d m f g lk²m ©«ª ­ df g Ç m $ _k²m ©«ª ­ df g _k²m ©«ª ­ d m f g Ç m
¢¢
ã
¬
¬
¢¤
X B¬ $ mY­
k ©«ª~¬ Q
,
ã À . on a À`ÁÀ grid to (4.2) leads to
Applying the Fourier analysis with .
"
I
"
" "\ µ "
" ¶ ¡¢
¢¢ ÷ m©«ª~¬ mY­ df g ¯ µ .y ÷ " m©«ª ­ df g ¯ " ¯ ÷ m©«ª ­ d " m f g ÷ m©«ª ­ d Ç m " f g ¶ ,
¯ ÷ $©«ª ­ d m f g ÷ $©«ª ­ df g Ç m ÷ $©«ª ­ ¬ d m f g Ç m ÷ $©«ª ­ df g
£
"
¢¢ $ mY­ ¯ I"
¬ ­ " ¯ "\ ¯ µ $ ­ " ¬ $ ­ " Ç ¶
$
¢¤ ÷)©«ª~¬ df g "
÷)©«ª d_" f g m ÷) ©«ª d_f g " m ¶ ,
µ .y ÷)" ©«ª df g ¯ ÷ m©«ª ­ d Ç m f g ÷ m©«ª ­ df g m ÷ m©«ª ­ d Ç ¬ m f g m ÷ m©«ª ­ df g
¬
¬
and further to
Ç mÇ ò "
$ "!$# $ù ' ­ m Ç-($ ò
,
"
+
0
.
/
,
1
2
+
&
.
3
,
1
2
L
¬ m L +"-&. / 3 1,2
© % m *¬ ) Ç ¬ Ç "
&
ù
$
'
$ "!$# *¬ )$ù ' ­ m Ç-6$ (4.3) þ f . + ò -.0/ +4-.531"2 m + ò -. / ò 3 1,2
¬ m
&© % m *¬ ) ¬
*¬ )
¡¢¢
978 Q
ETNA
Kent State University
etna@mcs.kent.edu
306
T. F. CHAN, K. CHEN AND J. L. CARTER
TABLE 4.1
Estimated smoothing rate of the Chambolle’s method
L ý L"
r f 7 þ f
Minimal C value
10
1
1/2
1/4
0.4444
0.8889
0.9412
0.9697
0.9877
0.9988
0.9999
: ÇÇG$m
: ÇGÝ
:
Ç;:
Predicted iterations for :
17
117
228
449
1116
11506
138150
L¦ý L*"
| f 7 þ f
V , Z=<V º , º Z
,]Nw";
Then to compute the smoothing rate
in the high frequency range
, we have to estimate this quantity numerically on same mesh grid and
as in [5] we found that the convergence rate is identical
each specification of ; with
to the smoothing rate shown in Table 4.1, where the last column shows the predicted number
of iterations to reduce a residual by
. Other numerical tests, based on using exact values
at pixels where is small, confirmed the sharpness of this last column. The results
for
confirm the belief that the behaviour of the dual equation is not similar to what is expected
of an elliptic equation. This analysis also shows that when there are a substantial number of
pixels at which
, the smoothing rate of
will be too close to ,
i.e., the Chambolle iterations fail to provide an effective smoother. This case will happen in
flat regions of the desired image . Since such a quantity will gradually get small in such
flat regions as iterations progress, one should observe that, correspondingly, the multigrid
algorithm should become slower and slower. Indeed this phenomenon has been observed.
^
,$
.
K
º?>
¯ . : Ç;:
º
t ): :
:RQ @A@
>B>
It remains to understand more of the nature of slow convergence of the Chambolle’s
iterations associated with small and to propose new methods to speed up the iterations.
;=
4.2. Analysis for a modified smoother. A simple generalization of Chambolle smoothing iterations is to introduce a parameter
into the basic scheme
C
¢ k²m ©«ª~¬ mY­ ²k m ©¿ª ­ . T T (D T
¯
¢
£
¢¢ $ mY­ $ ­ T C kT
+ ¢¢ k²©«ª~¬ ¯ k²©¿ª . T F
¤
Ck
¡¢¢
(4.4)
C .bq m .bq $ .1:
where
levels and
k²T ( m ©«ª ­ T k²T +$ ©¿ª ­ E
©m ¿ª~¬ ­mY­ T k $ m ©«ª~­ ¬ mY­ C k
k²T ( m ©«ª
k²T + ©«ª G
$ mY­ $ ©¿ª~¬ mY­ Ck
k ©«ª~¬
reduce to (2.4) on the finest level,
,
qm q$
,
©m «ª ­ Wq m
$ ©«ª ­ q $ ,
:
are normally not on coarse
5 T ( T k ( m ©«ª ­ T k +$ «© ª ­ " 6 $ °5 T + T k ( m ©«ª ­ T k +$ «© ª ­ " 6 $
T
T T
T
. ¥ T T
Q
ETNA
Kent State University
etna@mcs.kent.edu
ITERATIVE METHODS FOR THE DUAL FORMULATION FROM IMAGE RESTORATION
TABLE 4.2
Estimated smoothing rate of a modified Chambolle type method with
Minimal C value
10
1
1/2
1/4
: ÇÇG$m
: ÇGÝ
:
L ý
| f þ f
L"
307
HwëJIaè Ç;:
Predicted iterations for
0.2857
0.8000
0.8889
0.9412
0.9756
0.9980
0.9998
:
11
62
117
228
559
6901
69071
The finite difference discretization similar to (4.2) takes the form
" "
"
"
"
¢¢ lk m ©¿ª~¬ Ym ­ d f g _k m ©«ª ­ d f g . _k m ©«ª ­ d ¬ m f g _k m ©«ª ã ­ $ d Ç m f g _k m ©«ª ­ df g
¯
¢¢
lk $ «© ª ­ " d m f g lk $ ©«ª ­ " df g Ç m $ _k $ ©«ª ­ " df g _k $ ©«ª ­ " d
¢¢
ã ¬
¢
,
X A ¬
¬
£
C
k m ©¿ª~¬ mY­ k m ©«" ª~¬ m%­ C k m ©¿ª ­ " qWm
"
"
"
¢
(4.5) ¢
$ mY­
$ ­
$ ­
$ ­ Ç $ ­
¢¢ lk ©¿ª~¬ df g ¯ _k ©«ª df g . _k ©«ª d_f g ¬ m _k ©«ª ã $ d_f g m _k ©«ª df g
¢¢
lk m ©«ª ­ " d m f g lk m ©«ª ­ " df g Ç m $ _k m ©«ª ­ " df g _k m ©«ª ­ " d
¢¢
ã
¬
¬
¢¤
X B¬ $ mY­ $ m%­ $ ­ $
C k²©¿ª~¬
C k²©¿ª q Q
k²©«ª~¬
¡¢¢
m fg Ç m
m fg Ç m
Applying the Fourier analysis to (4.5) leads to the matrix
Ç mÇ ò "
"!$# $ù ' ­ m |Ç-$(
ò
+"-&./1"2 ¬ + m -&.5L 31,2 +"-&. / 3 1,2
L
&
©
%
¬
L
¬
K
m
"
$ "!$# ¬*)ù$' ­ ¬MK m |Ç-$( 978 Q
þ f . N+ ò -./O1,2 +"-.¬*3) 1,2 Ç ¬Mm K Ç + ò - . / ò 3 1,2
¬ m
©&% ¬ ¬LK
L¦ý ¬*L*)" ¬MK
,YN2m ¬*"²) ;!¬MV K , ZP<xV º , º Z
Then estimating | f þ f in the high frequency range
numerically gives the results in Table 4.2, where C .
than
Û gives much improved
leads rates
the standard Chambolle’s iterations. Intuitively one might suggest that C .
to a good
smoother but this is not the case.
In experiments, the use of C .
Û can indeed accelerate both the Chambolle iterations
and the corresponding multigrid method by up to Q : %.
4.3. Modified algorithms. In designing modified algorithms, the main consideration is
how to overcome
the slow convergence of the Chambolle type methods, either (4.1) or (4.4),
$(
for small
.
4.3.1. A simple multigrid algorithm. Having analyzed the convergence and smoothing
rates of the Chambolle’s iterations, a simpler idea is to ensure that the term is never too
small, so that multigrid algorithms would converge quickly.
We reconsider the modified system (3.2)
^ d_«© fª~g ¬ mY­ ^ d©«ªf g ­ . 5 div ^ ­ " " 6 ØÜ
©«ª
¯
df g
" " $ 8N
div _^ ©«ª ­
^ d©«ª~f g ¬ m%­
df g
ETNA
Kent State University
etna@mcs.kent.edu
308
T. F. CHAN, K. CHEN AND J. L. CARTER
C . Û)
^ d©«fª~g ¬ %m ­ ^ d©«fª g ­ . 5 div _^ ­ "K " 6 L ^©¿ª~¬ mY­ C ^©¿ª~¬ mY­ C ^®©¿ª ­ ,
(4.6)
©«ª
df g
df g
df g
¯
df g
N ÇG$
N
ÇGÝ
> Ä
where .
: insteadLSofR . ÇG $ : tried previously. ý!
With this choice,
so the smoothing rate is
and : steps would
:
x
:
Q
B
@
@
reduce a residual by :xQ A
method
Û @ which resembles the smoothing rate by a Gauss-Seidel
for a Poisson’s equation [2]. In practice, pre-smoothing steps ranging in Û
Û): would be
and in particular (with
sufficient to generate a converging multigrid method.
4.3.2. A semi-implicit method. A natural idea to increase the ‘implicitness’ of the previous scheme (2.5) is by
­ 5
%
m
­
"K " 6 " "
,
«
©
c
ª
¬
¿
©
ª
^
^
d
f
g
d
f
g
Y
m
­
%
m
­
­
(4.7)
.
div _^ ©«ª~¬
¯
d_f g ^ d_©«fª~g ¬
df g div _^ ©«ª
UT
which leads to no improvements
over (2.5). To understand the problem with
: , recognizing that .
, it is constructive to consider the primal-dual system (2.7)
9! ,
"\8 m%­ ! ,
¸ div _^ "\´8V
.1: , or ¸ div^ ©«ª~¬ mY­ V
©«ªc¬
.1:
^<.1:
©«ªc¬ m%­ ©«ª ­ ^ ©«ª~¬ mY­ .1:RQ
Put into matrix form on discretization, the above system can be written as
º|
0 YX
(4.8)
Z, $
, each­ ,ÅÙ¦of,$W size À
where m
Ù
W
m : $ 9 k $m 9
7 k "7
:
"
©«ª~¬ mY­
#º|
. : 9
7
:
,
À Á À À , denote two diagonal
matrices consisted
X , Y denote
,Å divergence$ operator
of entries of ©«ª
denote w
the
div and
the gradient
$, if there
operator
for vector forms of
, of size À Á . Clearly
are
sufficiently
large
$ due to , the coefficient matrix
number of extremely small diagonal (or : ) entries in m
of the linearized primal-dual system (4.8) will be singular!
One way to ensure that (4.8) is non-singular is to add a positive parameter
diagonal, so it becomes
0X
Y
(4.9)
º|
W
Ù
!
m
:
0
: $ 9 kK$m 9
7 k 7
©«ªc¬ m%­
.
#º|
k²m©«ª ­ 9
: 7
on the main
,
which will have the same solution as (4.8) upon convergence. This purely algebraic consideration is in fact equivalent to solving the partially time-marching primal-dual system
£
¢
¢¡¢ if one chooses
¯
¢¤
¢¢
"\8
m
Y
­
div ^ ©¿ª~¬
k²m ©¿ª~¬ mY­
T + m%­ V
¯­
T ©«ª~¬
©«ª k
. .
R,
T
,
©«ªc¬ m%­ ­ .
k²m ©«ª
$ ©«ªc¬ m%­ .
.
:
­ m%­ ,
«T © ª~( ¬ m%­
©¿ª k m ©«ª~¬
ETNA
Kent State University
etna@mcs.kent.edu
ITERATIVE METHODS FOR THE DUAL FORMULATION FROM IMAGE RESTORATION
TABLE 5.1
Comparison of a nonlinear multilevel algorithm to the Chambolle’s method with tol=
Problem
number
1
Size
À
2
63
128
256
63
128
256
Steps
55675
121926
212544
38529
82858
212887
Chambolle
CPU
325.7
2473.8
22978.8
226.3
1675.4
20309.0
PNSR
24.81
26.94
29.71
25.53
27.60
29.98
Cycles
4
4
4
4
5
5
Multigrid
CPU
2.5
9.1
48.8
2.9
9.7
43.2
TABLE 5.2
Performance of a nonlinear multilevel algorithm with tol=
Problem
number
1
2
Size
À
511
1023
2047
511
1023
2047
Cycles
5
5
6
5
5
6
Multigrid
CPU
158.9
1277.6
8365.2
163.0
1284.3
8191.6
309
çYé?[\
PNSR
24.88
27.06
29.88
25.63
27.64
29.95
çYé [\
PNSR
32.90
35.75
36.38
32.43
34.55
36.78
5. Numerical experiments. In this section, we shall first compare Algorithm 3.1 using
the smoother (4.6) with the Chambolle’s iterative method (2.5) in both solution quality and
speed of convergence. Then we demonstrate the performance of Algorithm 3.1 for some large
images which cannot be processed by the Chambolle’s iterative method (2.5) in an acceptable
amount of time. Finally we present some preliminary results from using the linearized primaldual iterations (4.9) as an iterative method, whose effective use in a multilevel algorithm will
be the subject of future work.
We shall use the two examples shown in Figs. 3.1-3.2 in our experiments. The stopping
criterion will be based on reducing the static residual, i.e., (2.4), to below a tolerance .
Restoration performance is quantitatively measured by the peak signal-to-noise ratio (PSNR)
U Ð^]
Ë
Ë
$
"$
Öb.
ÖPa . :KÓcbBd m4e à m Ef = aQBdQ f g `
d_f g
_
d
f
g
;¹= à the
FE pixel values of the restored
,Y ;V image
, Z and the original image
where a df g and d_2
f g , denote
respectively, with a
. Here we assume a}df g df g
: QBQ .
Ù`_
Ù`_
,]-"
Comparison. We take several resolutions of the same problems and display the results in
Table 5.1. Clearly one observes that the multigrid method is much more efficient than the
Chambolle’s method for delivering the same quality (PSNR) of restoration.
Large images. From the values of CPU in Table 5.1, one may envisage that getting the results
for
by Chambolle’s method can take many days, especially for small
(we should
remark that there are practical situations where restored results are already acceptable before
convergence). Instead, we test the examples with large for the multigrid method and show
the results in Table 5.2. Clearly one sees that the efficiency scales well with . The restored
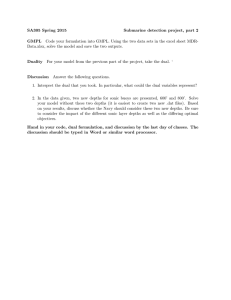
images for
are also shown in Fig. 5.1.
Performance of linearized primal-dual iterations. Finally we test the linearized primal-dual
method (LPD) (4.9) and show some results in Table 5.3. For the same tol=
, we see that
À
ÀÆÁÉÀ
R ) Q
U Ð^]
Ä
À . :
À
À
: Ç;g
ETNA
Kent State University
etna@mcs.kent.edu
310
T. F. CHAN, K. CHEN AND J. L. CARTER
MG solution u
Prob 1
100
100
200
200
300
300
400
400
500
500
600
600
700
700
800
800
900
900
1000
1000
200
400
600
800
1000
200
400
600
800
1000
800
1000
MG solution u
Prob 2
100
100
200
200
300
300
400
400
500
500
600
600
700
700
800
800
900
900
1000
1000
200
400
600
800
1000
200
400
è
hoëbçYé [i
êëÉì~éjckBHl[ímonpxëì~ì}õ çqjokBH4l[ím&rAsEtupGëô~ô}õ ö vPk^rmcrAsEt*pRëÍç~çw}ç~õ öqw
ì~ì}õ qç jckAH4l[í m&r sEt pRëÉô~é}õ w vPk^rmcr sEt pRëÍç~çwqx}õ çw
600
F IG . 5.1. Restored results from a multigrid method, with the left and the right plots displaying respectively
the noisy image and the restored image by cycles of MG. Here
for both problems. For problem :
and
. For problem :
and
.
TABLE 5.3
Performance of a linearized primal-dual algorithm with tol=
Problem
number
1
2
Size
À
63
127
255
63
127
255
Steps
255
348
432
261
340
461
LPD
CPU
198.0
1481.9
11040.4
191.2
1379.6
11300.6
ç
ì êëècéjckAH4l[ímcnpxë
çYé^[(\
PNSR
24.81
26.94
29.71
25.53
27.60
29.98
LPD takes much less iterations then the Chambolle’s method; see Table 5.1.
6. Conclusions. This paper presented two iterative solvers for solving the dual formulation for image restoration. After giving a unified formulation of the dual problem,
we analyzed the convergence rate of the widely-used Chambolle’s method and found that
contributes to the slow convergence of the method. We then proposed an
improved method suitable for use in multigrid methods to solve a regularized version of the
dual formulation. We also considered a linearized primal-dual iteration method for the dual
problem. Numerical results confirmed that the multigrid method with a modified Chambolle’s
.
KyT
:
ETNA
Kent State University
etna@mcs.kent.edu
ITERATIVE METHODS FOR THE DUAL FORMULATION FROM IMAGE RESTORATION
311
smoother is many orders of magnitude faster than the original method. The linearized primaldual iteration method is found to give fast convergence, but it has yet to be used in a multigrid
method.
REFERENCES
[1] G. AUBERT AND P. KORNPROBST, Mathematical Problems in Image Processing: Partial Differential Equations and the Calculus of Variations, Springer, Berlin, 2001.
[2] A. B RANDT, Multilevel adaptive solutions to boundary value problems, Math. Comp., 31 (1977),
pp. 333–390.
[3] A. B RANDT, Relaxation methods for the dual formulation, private communication, 2006.
[4] J. L. C ARTER, Dual method for total variation-based image restoration, CAM report 02-13,
UCLA, USA, 2002; see http://www.math.ucla.edu/applied/cam/index.html
[5] A. C HAMBOLLE, An algorithm for total variation minimization and applications, J. Math. Imaging Vision, 20 (2004), pp. 89–97.
[6] T. F. C HAN AND K. C HEN, On a nonlinear multigrid algorithm with primal relaxation for the
image total variation minimisation, Numer. Algorithms, 41 (2006), pp. 387–411.
[7] T. F. C HAN AND K. C HEN, An optimization-based multilevel algorithm for total variation image
denoising, Multiscale Model. Simul., 5 (2006), pp. 615–645.
[8] T. F. C HAN , K. C HEN , AND X. C. TAI, Nonlinear multilevel schemes for solving the total
variation image minimization problem, in Image Processing Based on PDEs, X.-C. Tai,
K. - A. Lie, T. F. Chan, and S. Osher, eds., Springer, Berlin, 2006, pp .265–288.
[9] T. F. C HAN , S. E SEDOGLU , AND F. E. PARK, A fourth order dual method for staircase reduction
in texture extraction and image restoration problems, UCLA CAM report 05-28, April 2005.
[10] T. F. C HAN , G. H. G OLUB , AND P. M ULET, A nonlinear primal dual method for total variation
based image restoration, SIAM J. Sci. Comput., 20 (1999), pp. 1964–1977.
[11] T. F. C HAN AND J. H. S HEN, Image Processing And Analysis: Variational, PDE, Wavelet, and
Stochastic Methods, SIAM, Phildelphia, 2005.
[12] K. C HEN, Matrix Preconditioning Techniques and Applications, Cambridge Monographs on Applied and Computational Mathematics, No. 19, Cambridge University Press, UK, 2005.
[13] C. G ROETSCH AND O. S CHERZER, Nonstationary iterated Tikhonov-Morozov method and third
order differential equations for the evaluation of unbounded operators, Math. Methods Appl.
Sci., 23 (2000), pp. 1287–1300.
[14] M. H INTERM ÜLLER AND G. S TADLER, An infeasible primal-dual algorithm for total bounded
variation-based inf-convolution-type image restoration, SIAM. J. Sci. Comput., 28 (2006),
pp. 1–23.
[15] Y. M EYER, Oscillating Patterns in Image Processing and Nonlinear Evolution Equations, University Lecture Series, Vol. 22, American Mathematical Society, Providence, RI, 2001.
[16] M. N G , L. Q. Q I , Y. F. YANG , AND Y. M. H UANG, On semismooth Newton’s methods for total
variation minimization, J. Math. Imaging Vision, 27 (2007), pp. 265–276.
[17] P. P ERONA AND J. M ALIK, Scale-space and edge detection using anisotropic diffusion, IEEE
TPAMI, 12 (1990), pp. 629–639.
[18] L. I. RUDIN , S. O SHER , AND E. FATEMI, Nonlinear total variation based noise removal algorithms, Physica D, 60 (1992), pp. 259–268.
[19] J. S AVAGE AND K. C HEN, On multigrids for solving a class of improved total variation based
PDE models, in Image Processing Based On Partial Differential Equations, X.-C. Tai, K.-A.
Lie, T. F. Chan, and S. Osher, eds., Springer, Berin, 2006, pp. 69–94.
[20] U. T ROTTENBERG , C. O OSTERLEE , AND A. S CHULLER, Multigrid, Academic Press, London,
2001.