Geophysical Journal International Viscoelastic mantle convection and lithospheric stresses
advertisement

Geophysical Journal International
Geophys. J. Int. (2010) 183, 35–63
doi: 10.1111/j.1365-246X.2010.04708.x
Viscoelastic mantle convection and lithospheric stresses
Marcus J. Beuchert∗ and Yuri Y. Podladchikov
Accepted 2010 June 18. Received 2010 June 18; in original form 2009 April 14
SUMMARY
Accurate predictions of stress distribution in the lithosphere are of major importance for
approaching more realistic numerical models of the mantle-lithosphere system. Since stress
fields in the lithosphere computed in convection models differ substantially between viscous
and viscoelastic rheologies, it is essential to employ a viscoelastic rheology when accurate
stresses are to be predicted in mantle convection models involving the lithosphere. This difference in stress distribution and magnitude has important implications for accurate modelling
of stress-dependent processes like power-law creep, shear heating and plasticity. A further
requirement for computation of accurate stress fields is to ensure numerically divergence-free
solutions in the Boussinesq approximation. We present the technical background required for
implementation of numerically incompressible solutions and for implementation of a Maxwell
viscoelastic rheology in the frame of the finite element method (FEM). We employ the Jaumann invariant stress derivative in our implementation and demonstrate that the choice of
the invariant stress derivative is irrelevant for geodynamic simulations. We discuss potential
numerical advantages of a viscoelastic rheology when large viscosity variations are applied in
thermal convection models. Due to the physical transition from effectively viscous to elastic
behaviour in a viscoelastic model, the introduction of viscosity cut-offs generally applied in
viscous models can be avoided.
Key words: Numerical solutions; Geomechanics; Dynamics of lithosphere and mantle;
Mechanics, theory, and modelling; Rheology: crust and lithosphere; Rheology: mantle.
1 I N T RO D U C T I O N
1.1 Stresses in the lithosphere
The Earth’s mantle can be divided into two major rheological regimes. On geological timescales, (i) the hot sublithospheric interior of the
mantle exhibits large deformations driven by thermal convection. Here, stresses are relaxed on the order of only thousands of years and
consequently the hot interior effectively behaves like a viscous fluid. (ii) The lithosphere, in contrast, constitutes a rigid, elastic shell, which
can preserve stresses over long geological times. The response of both lithospheric and sublithospheric mantle can be modelled using a
Maxwell viscoelastic rheology. Here, the transition between dominantly viscous and dominantly elastic behaviour is determined by the local
viscosity which in turn depends on the local temperature. Because viscosity is strongly dependent on temperature, the high viscosities in the
cold lithosphere result in its elastic behaviour, whereas the relatively low viscosities in the hot interior are the reason for its viscous response
(see Section 4 for further explanations).
Because the cold lithosphere responds like an elastic solid on geological timescales, the stress distribution inside the lithosphere deviates
significantly from that one would find in a viscous fluid. The degree of elastic contribution of a viscoelastic model can be expressed by the
Deborah number De as defined in (32). For De = 0, the rheology is viscous, for De > 0, the elastic contribution increases with increasing
De. If stresses within the lithosphere are to be predicted accurately, elasticity in the lithosphere has to be taken into account. To illustrate this
point, we show the different effective stress distributions computed in a viscous (De = 0) and a viscoelastic thermal convection model for a
range of increasing Deborah numbers De in Fig. 1 and the associated stress profiles of the same simulations in Fig. 2. The effective stress σ eff
∗ Now at: Goethe-Universität Frankfurt, Institut für Geowissenschaften, Facheinheit Geophysik, Altenhöferallee 1, 60438 Frankfurt am Main, Germany.
C
2010 The Authors
C 2010 RAS
Journal compilation 35
GJI Geodynamics and tectonics
Physics of Geological Processes (PGP), University of Oslo, Sem Selands vei 24, 0316 Oslo, Norway. E-mail: beuchert@geophysik.uni-frankfurt.de
36
M.J. Beuchert and Y.Y. Podladchikov
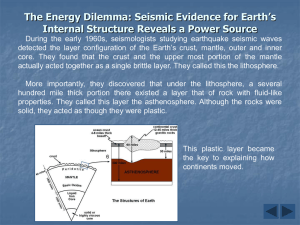
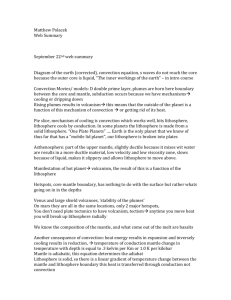
Figure 1. Distribution of effective stress (middle column) and pressure (right-hand column) in a thermal convection simulation (temperature field shown in
the left column) of the whole mantle (2890 km) after 200 Myr for Deborah numbers De = 0 (viscous), 10−10 , 10−9 and 10−8 . Shown is the upper part of the
model, corresponding to the upper mantle (660 km). At the top centre, an initial temperature anomaly with low geothermal gradient was inserted, taken to
represent a piece of continental lithosphere. Bottom heating Rayleigh number Ra = 5 × 107 , exponential temperature-dependent viscosity according to (15)
with maximum viscosity ratio μr = μ(T min )/ μ(T max ) = 109 . The strong temperature-dependence of viscosity results in high viscosities at the top and within
the cold temperature anomaly. The stress and pressure distribution within the lithosphere differs substantially between viscous (De = 0) and viscoelastic (De
> 0) simulations. Increasing the Deborah number (top to bottom rows) results in an increase in thickness of the elastically responding lithospheric keel. In the
viscoelastic simulations (De > 0), a low (negative) pressure core develops inside the lithosphere. The depth of this core increases with increasing De. Top and
bottom boundaries are zero traction (free slip) boundaries, sides are periodic (wrap-around). Temperatures are fixed at minimum and maximum values at top
and bottom, respectively. The grid is condensed towards the top and bottom boundaries. Grid resolution: 525 × 351. See Section 4.8 for further details and
quantitative exploration of parameters Ra and μr .
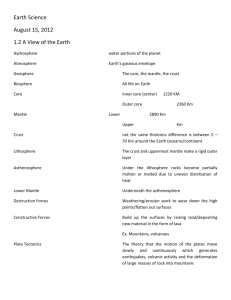
Figure 2. Horizontally averaged effective stress (left) and pressure (right) profiles through the upper part of the domain underneath the cold temperature
anomaly shown in Fig. 1 for different Deborah numbers De (viscous: De = 0). See Section 4.8 for further details and quantitative exploration of parameters
Ra and μr .
is a measure of the deviation of the stress state from hydrostatic and is defined by
σx x − σ yy 2
+ σx2y ,
σeff =
2
(1)
where σ xx and σ yy are normal stresses in x- and y-direction and σ xy is the shear stress.
It is immediately obvious from Fig. 1 and Fig. 2 that the stress and pressure fields in the lithosphere obtained with viscous and viscoelastic
rheologies differ substantially. Whereas in a viscous rheology (De = 0), stresses are concentrated in the uppermost part of the lithosphere with
the maximum at the top, stresses are distributed much more evenly throughout the lithosphere in the viscoelastic model and the maximum is
found at mid-depth within the lithosphere. By increasing the Deborah number, the thickness of the elastically responding lithospheric keel
C
2010 The Authors, GJI, 183, 35–63
C 2010 RAS
Journal compilation Viscoelasticity and lithospheric stresses
37
increases correspondingly. Interesting is further the formation of a low (negative) pressure core inside the viscoelastic lithosphere which is
absent in the viscous model (De = 0). The depth of the low (negative) pressure core increases with increasing De. Details about employed
parameters and numerics are given in the caption of Fig. 1. Model equations, additional simulations and further discussions are included in
Section 4.8.
The fact that the notion of effective elastic thickness (EET) of the lithosphere (see Burov & Diament 1995 for a review) becomes
immediately relevant in the viscoelastic simulations, but is not applicable to the viscous simulations shows that the viscoelastic rheology
captures the rheological behaviour of the lithosphere much more realistically than the viscous one (see Figs 1 and 2). Consequently, if models
are to predict accurate stresses in dynamic mantle-lithosphere models, a viscoelastic rheology has to be employed.
Large stresses at the top boundary have previously been reported by several authors for thermal convection models with viscous rheology
and large temperature-dependent viscosity (e.g. Moresi & Solomatov 1995; Lowman & Jarvis 1996; Tackley 1996; Moresi & Solomatov
1998a; Lowman & Jarvis 1999; Solomatov 2004). Tackley (1996), for example, finds very high stresses occurring in the stiff lid, typically
two orders of magnitude higher than the stresses in the interior of the domain. Thermal convection with temperature-dependent viscosity can
cause focusing of large stresses in the upper thermal boundary layer, as shown by Fowler (1985, 1993) and confirmed in our model (see Fig. 2,
left panel, black line). We also observe this amplification for viscoelastic rheology (Fig. 2, left panel, De > 0). Previous workers showed that
the stress amplification in viscoelastic models begins to take place at a viscosity ratio of 104 (Podladchikov et al. 1993; Poliakov et al. 1993).
Our model implies that for large thermally determined viscosity ratios, lithospheric stresses can be in excess of kbars, particularly for higher
Rayleigh numbers (see Section 4.8). Such stress would not be supported in the lithosphere, but would instead lead to brittle failure, which
would further effect stress distribution. In viscoelastic models, large stresses accumulate throughout the entire depth of the elastic lithosphere
and do not only concentrate at the very top as for the viscous rheology. This has potentially important implications for the question of how
to produce plate tectonics in numerical models. Due to the stress amplification at depth in the elastic lithosphere (Podladchikov et al. 1993),
whole lithosphere failure (Marques & Podladchikov 2009) might be possible in viscoelastic numerical models even when using realistically
high friction coefficients (see Beuchert et al. 2010 for a discussion). Being able to produce whole lithosphere failure using model parameters
consistent with laboratory experiments is the current quest in realistic modelling of subduction initiation (see e.g. Lenardic et al. 2008) and
continental rifting (see e.g. Crameri & Kaus 2010) in mantle convection models. Viscoelastic stress amplification might play an important
role in this concern (Podladchikov et al. 1993; Poliakov et al. 1993; Kaus & Becker 2007).
The accurate prediction of stresses and their magnitude is of substantial importance for modelling of stress-dependent processes like
power-law creep, shear heating and plasticity. For shear heating, for example, thermal runaway instabilities possibility related to deep
earthquakes and ductile strain localization at high confining pressures (John et al. 2009) operate only at high stress levels (GPa) and appear
feasible in the light of viscoelastic stress amplification. Even though we do not present modelling of these processes in this paper, the
pre-requisite for investigating these processes is a mechanical approach which yields accurate stresses. We ensure this by (i) applying a
Maxwell viscoelastic rheology (Section 4) and (ii) enforcing divergence-free solutions by employment of a mixed velocity-pressure finite
element formulation in combination with an iterative penalty method (Section 3.2).
1.2 Work by previous authors
A number of studies have so far addressed convection of viscoelastic fluids (Harder 1991; Moser et al. 1993; Zhong et al. 1996; Moresi et al.
2002; Muhlhaus & Regenauer-Lieb 2005; Li & Khayat 2005a,b; Furuichi et al. 2008). Several workers have investigated the stress build-up
associated with viscoelastic rheology (Kusznir & Bott 1977; Kusznir & Park 1984; Poliakov et al. 1993; Marques & Podladchikov 2009) and
viscoelastic effects on geodynamic problems involving gravitational instability (Poliakov et al. 1993; Kaus & Becker 2007; Burov & Molnar
2008; Schmeling et al. 2008). In recent years, advanced numerical techniques for large strain (Eulerian) viscoelasticity have been developed
by several workers for application in geodynamic simulations (Schmalholz et al. 2001; Vasilyev et al. 2001; Moresi et al. 2002; Moresi et al.
2003a,b; Muhlhaus & Regenauer-Lieb 2005; Cooper et al. 2006; Moresi et al. 2007; Furuichi et al. 2008; Popov & Sobolev 2008).
1.3 Outline
We present the new finite element method (FEM) Matlab code VEMAN (ViscoElastic MANtle) developed for modelling thermal convection
in the viscoelastic mantle of our planet. We first introduce the governing thermal convection equations for a Boussinesq fluid and show
their formulation in the frame of the FEM. For solution of the thermal diffusion-advection equation, we apply operator splitting and use
semi-Lagrangian characteristics for thermal advection. Within this approach, we present the implementation of a fourth-order accurate
Runge–Kutta method in combination with an adaptive time stepping procedure. We then show the implementation of a Maxwell viscoelastic
rheology and extend the standard viscous Boussinesq formulation for FEM accordingly. Due to the stress ‘memory’ of elasticity, stress
rotation and advection has to be dealt with in viscoelastic rheologies. We present our approach using the Jaumann invariant stress derivative
and discuss potential numerical advantages of a viscoelastic rheology when modelling thermal convection with large viscosity variations. We
tested the various features of the code against several analytical solutions and published benchmarks. The results of these tests are presented
in Section 5.
C
2010 The Authors, GJI, 183, 35–63
C 2010 RAS
Journal compilation 38
M.J. Beuchert and Y.Y. Podladchikov
2 T H E R M A L C O N V E C T I O N E Q UAT I O N S A N D N O N - D I M E N S I O N A L I Z AT I O N
2.1 Thermal convection equations
The thermal convection equations are based on the laws of conservation of energy, mass and momentum. For flow of incompressible fluid
(Boussinesq approximation) at infinite Prandtl number (inertia-less flow), the conservation laws simplify to the thermal energy, continuity
and stress equilibrium equations, respectively.
The thermal energy equation consists of diffusion and advection terms and thus will hereafter be referred to as heat diffusion-advection
equation
∂T
∂T
∂
∂T
κ
− vi
,
(2)
=
∂t
∂ xi
∂ xi
∂ xi
with temperature T, heat diffusivity κ, and v i and xi being velocity and Eulerian coordinates vectors, respectively. Problems with the numerical
solution of the advection term in (2) and our approach of operator-splitting are discussed in Section 3. Introduction of internal heating by
decay of radioactive elements and viscous shear heating into the thermal energy equation is shown separately in Appendix B to improve
readability of the equations.
The continuity equation expresses incompressibility of the fluid.
∂vi
= 0.
∂ xi
The problem of numerical realization of the incompressibility condition (3) is discussed in Section 3.2.
In thermal convection problems, the stress equilibrium equation
(3)
∂σi j
∂τi j
∂p
∂τi j
∂p
−f =
−
−f =
−
− ρ0 gα (T − T0 ) ẑ = 0,
∂xj
∂xj
∂ xi
∂xj
∂ xi
(4)
contains a vertical body force vector f related to temperature-related buoyancy changes in the fluid. τ ij , p, ρ 0 , g, α and ẑ are deviatoric
stress tensor, pressure, density at reference temperature T0 , acceleration of gravity, thermal expansion coefficient and a unit vector pointing
vertically downwards, respectively.
For linear viscous rheology, the deviatoric stress tensor τ ij is related to the deviatoric strain rate tensor ε̇i j through the constitutive
equation
ε̇i j =
1
τi j .
2μ(T )
(5)
Due to the incompressibility condition, deformation can be fully described in terms of deviators. The deviatoric stress tensor τ ij is related
to the total stress tensor σ ij through the relation τi j = σi j − 1/3σkk δi j = σi j + pδi j and, analogously, deviatoric strain rate ε̇i j is related to
total strain rate ε̇i j by ε̇i j = ε̇i j − 1/3ε̇kk δi j , where δ ij is the Kronecker delta defined as
1; i = j
.
(6)
δi j =
0; i = j
The strain rate tensor is
1 ∂vi
∂v j
ε̇i j =
.
+
2 ∂xj
∂ xi
(7)
Given the definition of the strain rate tensor (7) and using the constitutive relation (5), the stress equilibrium eq. (4) can be recast to yield
the Stokes equation for incompressible fluids.
∂p
∂
∂vi
∂v j
2 ∂vk
μ(T )
+
−
δi j −
− ρ0 gα(T − T0 )ẑ = 0.
(8)
∂xj
∂xj
∂ xi
3 ∂ xk
∂ xi
We chose viscosity μ in (8) to be an exponential function of temperature T described by
μ(T ) = μ0 exp[−A(T − T0 )] ,
(9)
where μ0 is a reference viscosity taken to be the viscosity at the lower, hot thermal boundary, A is a non-dimensional activation parameter
A = Ea /(RT02 ) with Ea and R being activation energy and universal gas constant, respectively. Eq. (9) is referred to as Frank–Kamenetskii
approximation, and gives a good approximation for the creep law of polycrystalline olivine aggregates (see e.g. Karato & Wu 1993) for large
viscosity contrasts where the temperature-dependence dominates over pressure-dependence and other factors (Solomatov & Moresi 1996;
Solomatov & Moresi 2000).
2.2 Non-dimensionalization
The independent parameters domain height h̃, heat diffusivity κ̃, temperature difference throughout the domain T̃ and the reference viscosity
at the lower, hot boundary μ̃0 are used as scales to non-dimensionalize the governing equations. Substitution of the scaled parameters into
C
2010 The Authors, GJI, 183, 35–63
C 2010 RAS
Journal compilation Viscoelasticity and lithospheric stresses
39
the governing equations results in two non-dimensional parameters, the initial Rayleigh number Ra and a creep activation parameter λ.
Ra =
λ=
ρ0 gα T̃ h̃ 3
,
κ̃ μ̃0
E a T̃
.
RT02
(10)
(11)
The resulting non-dimensional form (∗ denotes non-dimensional variables) of the governing equations is
∂T ∗
∂T ∗
∂2T ∗
=
− vi∗ ∗ ,
∗2
∗
∂t
∂ xi
∂ xi
(12)
∂vi∗
= 0,
∂ xi∗
(13)
∂v ∗j
∂ ∗ ∗ ∂vi∗
2 ∂vk∗
∂ p∗
μ (T )
+ ∗ −
δ − ∗ − Ra(T ∗ − T0∗ )ẑ = 0,
∗
∗
∗ ij
∂xj
∂xj
∂ xi
3 ∂ xk
∂ xi
μ∗ (T ∗ ) = exp[−λ(T − T0 )∗ ] .
(14)
(15)
Asterisks (∗ ) are omitted hereafter. A summary of all non-dimensional variables and parameters and their non-dimensionalization is
given in Table 1.
For the numerical integration of the system of equations (12)-(14), difficulties generally arise from the non-linearity of the heat advection
term in (12) and from the requirement to satisfy the incompressibility condition (13). These issues will be addressed in Sections 3.1 and 3.2,
respectively.
3 F E M F O R M U L AT I O N O F T H E R M A L C O N V E C T I O N E Q UAT I O N S
A N D O P E R AT O R S P L I T T I N G
We use the FEM for integration of the governing equations given in the previous section. A short outline of the basis of the FEM is given
in Appendix A. For comprehensive reviews, the reader is referred to the large number of standard FEM books available, for example, Bathe
(1996) and Zienkiewicz & Taylor (2000). We split the heat diffusion-advection equation in diffusive and advective parts and integrate them
separately, a procedure referred to as ‘operator splitting’ (see Zienkiewicz & Taylor 2000, volume 3, chapter 3 for detailed description of
FEM implementation; chapter 2 of the same book discusses the pros and cons of this method versus upwinding schemes; Spiegelman 2004).
The heat diffusion term is integrated using the FEM as shown below and the heat advection term by means of semi-Lagrangian characteristics
as outlined in Section 3.3.
3.1 Heat diffusion-advection equation
Heat diffusion-advection constitutes a transient problem, which we integrate in time using finite difference time stepping with a backward
Euler time step. The time-discretized form of the heat diffusion-advection eq. (12) is thus
n+1
T n+1 − T n
∂ 2 T n+1
T n+1 − T n
n+1 ∂ T
= n+1
=
−
v
,
i
t
t
− tn
∂ xi
∂ xi2
(16)
where n denotes successive time steps. Looking at the advection term in (16), we note that we are dealing with a non-linear problem, since
the advection term contains a product of both unknown velocity v and temperature T at time n+1. Since non-linear problems are difficult
to solve, we want to decouple temperature and velocity degrees of freedom in our equations. This can be done by introducing ‘operator
splitting’ which means in our case to integrate diffusion and advection terms in (16) separately in successive procedural steps, an approach
recommended, for example, by Spiegelman (2004). For integration of the heat diffusion term, we use the Galerkin FEM as shown below (see
Appendix A for a short introduction to the FEM), and for the advection part, we follow the semi-Lagrangian approach using computation of
characteristics (Section 3.3).
Upon regrouping of (16) and multiplying with t, the heat diffusion term is
T n+1 −
C
t
∂ 2 T n+1
= T n.
∂ xi2
2010 The Authors, GJI, 183, 35–63
C 2010 RAS
Journal compilation (17)
40
M.J. Beuchert and Y.Y. Podladchikov
We obtain the ‘weak’ FEM formulation of (17) following (A6), Appendix, and applying integration by parts which reduces the derivatives
from second to first order.
∂NT ∂N
T̄n+1 d = NT NTn d ,
NT N + t
(18)
∂x ∂x
where T̄ are temperature unknowns.
3.2 Stokes equation for incompressible flow
As demonstrated by Pelletier et al. (1989), failure to satisfy the incompressibility condition (13) in numerical models can result in strikingly
erroneous computations of the flow field. Thus, it is important to ensure that the solution obtained be divergence-free. This is notoriously
difficult based on a purely velocity-based FEM formulation where the pressure term in the Stokes eq. (14) is used both to enforce the continuity
equation and to compute the flow field. In the velocity-based approach, divergence is penalized by a parameter K t (‘penalty parameter’)
that arises from the time-discretized form of the definition for pressure.
p = −K εkk ≈ −K
∂vi
∂vi
dt ≈ −K t
,
∂
x
∂
xi
i
t
(19)
with K being the elastic bulk modulus. Clearly, only for high values of K t would one obtain a numerically divergence-free solution (small
p/K t ratio). Yet, such choice is prohibited due to resulting ill-conditioning of the FEM matrices (e.g. Pelletier et al. 1989) and it further
entangles solutions for pressure and stress fields that exhibit spurious modes (‘checkerboard pattern’), because the elements become too stiff
and ‘lock’ (see e.g. Bathe 1996; Zienkiewicz & Taylor 2000).
To circumvent the problem, we use a mixed velocity-pressure (v-p) FEM formulation for solution of the mechanical problem (Stokes
equation) in combination with an iterative penalty method; our method is similar, but not identical to, for example, Cuvelier et al. (1986) and
Zienkiewicz et al. (1985). In the iterative penalty approach, the incompressibility constraint (13) is relaxed to allow for minute volumetric
strains which are then balanced against the pressure arising from them and minimized in an iterative process. We can formulate the problem
as follows:
∂p
∂vi
∂v j
2 ∂vk
∂
μ(T )
+
−
δi j −
− Ra (T − T0 ) ẑ = 0,
(20)
∂xj
∂xj
∂ xi
3 ∂ xk
∂ xi
1 ∂p
∂vi
+
= 0,
∂ xi
K ∂t p
(21)
where (20) is a restatement of (14). Here, in the frame of the following iterative procedure, we formally introduce a pseudo-time tp into the
modified continuity eq. (21), since pressure arises by definition from volumetric elastic strain [see (19)] and the continuity eq. (13) instead
involves strain rates.
Discretization of the continuity eq. (21) in pseudo-time steps results in
1 p k+1
1 pk
∂vik+1
+
=
,
∂ xi
K tp
K tp
(22)
where k denotes iteration steps. K tp is a purely numerical parameter in the iterative procedure. To emphasize this fact, we replace K tp
in the following by a numerical penalty parameter κ, which we are free to choose according to performance criteria only (convergence and
matrix conditioning).
In the following, we develop a FEM formulation of (20) and (22) using the Galerkin method [see (A6), Appendix]. After integration by
parts, we obtain
BT μD Bv̄(k+1) d
−
−
HT Bvol v̄(k+1) d
BTvol Hp̄(k+1) d
−
1
κ
− Ra
HT Hp̄(k+1) d
NT N(T − T0 )ẑd
=−
1
κ
= 0,
HT Hp̄(k) d ,
(23)
where matrices B and Bvol contain shape functions derivatives [see (A7), Appendix, for definition] for velocity and pressure unknowns in
column vectors v̄ (with alternating x- and y-components for two dimensions) and p̄, respectively, N and H are row vectors containing velocity
and pressure shape functions, respectively, and T is a column vector of known temperatures from the previous time step. The B matrix
transforms velocities into strain rates according to Bv̄ = ε̇ with ε̇ = { ε̇x x ε̇ yy γ̇x y }T , where we follow the engineering notation for the
∂v
x
shear strain rate γ̇x y = ∂v
+ ∂ xy , and the D matrix [see (A8), Appendix, for definition] extracts the deviatoric component of this strain rate
∂y
vector for plane strain. The Bvol matrix transforms velocities into volumetric strain rates, that is, divergence.
We can write the set of equations (23) more concisely as
⎤ ⎧ (k+1) ⎫ ⎡
⎨ v̄
⎬
Kvp
Kvv
f
⎦
⎣
,
(24)
=
Kpv −Kpp ⎩ p̄(k+1) ⎭
−Kpp p̄(k)
C
2010 The Authors, GJI, 183, 35–63
C 2010 RAS
Journal compilation Viscoelasticity and lithospheric stresses
41
T
where we define Kvv = BT μD Bd , Kvp = Kpv
= − BTvol Hd , Kpp = κ1 HT Hd and f =Ra NT N(T − T0 )ẑd . When we assume
pressure to be discontinuous between elements, we can eliminate the pressure degrees of freedom on the element level by substituting in (24)
the modified continuity equation (lower row) into the Stokes equation (upper row), a procedure referred to as ‘static condensation’ or ‘Schur
−1
Kpv )d .
complement’. Thus, we obtain for the computation of velocities v a modified stiffness matrix K = (BT μD B + Kvp Kpp
When we now solve the system of linear equations Kv̄ = f for velocities, the solution will retain some residual divergence, since the
modified continuity equation explicitly allows for minute volumetric strains. To eliminate the remaining divergence, we correct the solution
for the velocity field by iteratively balancing it against the pressure resulting from the remaining volumetric strain. We can write an explicit
update rule for pressure p̄ in matrix/vector formulation:
−1
Kpv v̄(k+1) .
p̄(k+1) = p̄(k) + Kpp
(25)
We can then employ the corrected pressure p̄ to update the right-hand side related to velocities v in (24) and solve the system of linear
equations implicitly. Thus, we obtain a corrected velocity field v̄
(26)
v̄(k+1) = K−1 f − Kvp p̄(k)
Combining (25) and (26), we can write the iterative procedure as follows:
p̄ = 0
while div(v̄) > tolerance
solve for v̄ : Kv̄ = f − Kvp p̄ (system of linear equations)
div(v̄) = Kpv v̄
−1
div(v̄)
p̄ = p̄ + Kpp
(27)
end
The iterations are repeated until the divergence is minimized below a desired tolerance level. A similar short review of the method is given
in Dabrowski et al. (2008).
The mixed v-p penalty formulation with discontinuous pressure requires the use of specific element types that employ shape functions
of lower order for pressure than for velocity degrees of freedom. Following the recommendation of Fortin (1981) (also cited in Cuvelier et al.
1986) and Bathe (1996) for the choice of the optimal element for incompressible flow), we use the nine node Crouzeix–Raviart quadrilateral
element (Q2 -P1 ) with biquadratic shape functions for velocities (and temperatures) and bilinear shape functions for pressure. The iterative
penalty method was employed for seven node elements by Poliakov & Podladchikov (1992).
Since we assume a linear pressure interpolation, the solution vector p̄ contains three pressure variables P0 , P1 and P2 per element. Once
p̄ is obtained from the above iterations, the pressure field can be computed using the linear pressure function p(x, y) = p0 + p1 x + p2 y and
global x-y-coordinates.
3.3 Semi-Lagrangian backward characteristics for heat advection
For integration of the advection term in the heat diffusion-advection eq. (16), we use semi-Lagrangian characteristics. In this approach, the
static Eulerian reference frame is abandoned and fictitious backward in time particle trajectories (‘characteristics’) are computed away from
the grid nodes using the velocity field obtained from solution of the Stokes equation. Temperature is then interpolated to the tip of those
trajectories and the obtained values are assigned to the corresponding grid nodes. This assignment effectively corresponds to a Lagrangian
advection, the difference being that temperatures are not continuously stored on passively advected tracer particles, but temperatures are only
interpolated to fictitious tracer particles for one backward time step. Within the semi-Lagrangian characteristics procedure, time integration
techniques with varying accuracy can be employed. The simplest possibility is to use one full time step (Euler) backward. Yet, as will be
shown below, for the same time step size, better accuracy in terms of low numerical diffusion and adequate capturing of the characteristics’
curvature can be achieved with higher order accurate time integration techniques. We chose to use a fourth-order accurate Runge–Kutta
scheme. Here, characteristics are computed using sub-time steps, rendering the actual tracing of the characteristics’ course more accurate.
The backward characteristics Runge–Kutta fourth-order scheme with subsequent assignment of temperatures to the nodes (advection)
consists of the following steps (see Fig. 3 for illustration):
x2 (t −
t/2) = x1 −
t/2 · v(x1 , t),
x3 (t −
t/2) = x1 −
t/2 · v(x2 , t −
x4 (t −
t) = x1 −
x̃ = x1 −
t
v(x1 , t) v(x2 , t −
+
6
3
T(x1 , t) = T∗ (x̃, t −
C
t · v(x3 , t −
t).
2010 The Authors, GJI, 183, 35–63
C 2010 RAS
Journal compilation t/2),
t/2),
t/2)
+
v(x3 , t −
3
t/2)
+
v(x4 , t −
6
t)
,
(28)
42
M.J. Beuchert and Y.Y. Podladchikov
Figure 3. The fourth-order Runge–Kutta scheme consists of four successive evaluations of the velocity field (designated by numbers 1 to 4). Coloured vectors
and lines indicate velocity field and associated fictitious particle trajectory, respectively. First, the velocity field v(n, j) at time n and node location j (blue vector)
is obtained from solution of the Stokes equation. This velocity field (1) is used to calculate a trajectory (blue) for a half-step backward in time t/2 to locations
(2). The nodal velocity field at time v n−1/2 (orange vector; simply obtained from time interpolation v n−1/2 = (v n +v n−1 )/2) is then interpolated to locations
(2) and applied to obtain new backward half-time step trajectories (orange) from nodes j to locations (3). Again, the nodal velocity field v n−1/2 is interpolated
to these locations (3) and the resulting velocity field (green vector) is used to obtain trajectories backward in time (green) for a full time step t. The nodal
velocity field v n−1 (pink) saved from the previous time step is interpolated to locations (4) and its solution is, together with the velocity field evaluations at
the previous locations (1)–(3), used to obtain a weighted velocity field (see fourth equation in (28)); with this velocity field, the characteristics backward in
time to points X are computed, nodal temperatures T(n, j) are interpolated to points X and assigned to nodes j. Adapted to backward in time from forward
Runge–Kutta-4 description in Press (1992) and Spiegelman (2004).
Here, x1 are the nodal coordinates, v velocities, t the current time, t the time step size and T∗ the temperature obtained from
FEM solution of the heat diffusion eq. (18). The Runge–Kutta-4 scheme requires evaluation of velocities at times t, t– t/2 and t– t
and three spatial interpolations to points x2 , x3 and x4 . We avoid additional evaluation of the velocity field at t– t/2 by assuming that
v(t − t/2) = 1/2[v(t) + v(t − t)]. During the Runge–Kutta-4 substepping procedure, velocities v and temperatures T are interpolated to
the tip (x,y) of these trajectories (see Fig. 3 for illustration) by means of the FEM interpolation function [restated from (A3), Appendix A]
nn
Ni (x, y)ai ,
(29)
ã(x, y) =
i=1
where i is the node number, nn the number of nodes and ã is an approximation of the desired property (in our case v and T) and a are its
known nodal values. The complete procedure is described in more detail in the caption of Fig. 3.
The semi-Lagrangian characteristics technique allows relatively large time steps, while being more cost-efficient and accurate than
other approaches; in particular, it preserves sharp gradients better than other techniques (Spiegelman 2004). This becomes apparent when
comparing the performance of the semi-Lagrangian approach with pure Euler frame approaches like the classical upwind technique, as shown
in Section 5.2 (Fig. 14).
3.4 Adaptive Runge–Kutta-5 time stepping
For thermal convection simulations, the inherently unsteady character of the flow strongly favours the use of adaptive time stepping algorithms.
Slow formation of thermal boundary layers by thermal diffusion at the lower and upper boundaries are followed by sudden, catastrophic
convective overturns on detachment of the boundary layers with subsequent ascent or descent of hot and cold plumes, respectively. The
distinct rates for diffusion- (slow) and advection- (fast) dominated phases result in disparate time step requirements for the advection method.
If one were to determine a maximum possible constant time step, advection-dominated phases would dictate a small constant time step even
for diffusion-dominated periods and consequently, this approach would result in long overall simulation runs. By automatically finding the
optimal time step during the simulation, adaptive time step control algorithms can dramatically improve the performance and result in orders
of magnitude shorter runtime.
We follow the approach of time step doubling presented in Press (1992) for our implementation of the adaptive time stepping routine. Its
essence is to compare the computed solutions for the characteristics (3.3) when taking a trial full and two successive half time steps. Based on
a specified relative accuracy of the two solutions obtained for the characteristics, the time step is adjusted. If the accuracy requirement is not
fulfilled for the full time step, the solutions are discarded and a smaller trial time step is chosen. If the accuracy is sufficient, the subsequent
time step size is increased. This error control mechanism results in cancellation of the fifth-order truncation error and theoretically increases
the accuracy of the Runge–Kutta scheme from fourth- to fifth-order (Press 1992).
4 MAXWELL VISCOELASTIC RHEOLOGY
4.1 Relevance of viscoelasticity
Use of a viscous rheology might be appropriate for modelling the dynamics of the hot, convecting interior of our planet. Yet, when the
relatively cold, elastic lithosphere is included in the simulation, a viscoelastic rheology is more appropriate. While the hot, sublithospheric
C
2010 The Authors, GJI, 183, 35–63
C 2010 RAS
Journal compilation Viscoelasticity and lithospheric stresses
43
interior experiences strong deformation on geological timescales and thus behaves like a viscous fluid, the lithosphere itself remains relatively
undeformed over long geological times and exhibits the properties of an elastic solid. The difference in response of the mantle in the relatively
hot sublithospheric interior and the relatively cold lithosphere is a consequence of the strong temperature dependence of creep activation in
mantle rocks (Karato & Wu 1993). A Maxwell rheology naturally combines both viscous and elastic behaviour of mantle rocks, with the
transition between the two rheological regimes being determined by the temperature-dependent viscosity and the timescale considered.
4.2 Formulation
The constitutive equation for a Maxwell material is given by
1
1 Dτi j
,
τi j +
ε̇i j =
2μ(T )
2G
Dt
viscous
(30)
elastic
Dτi j
Dt
where
denotes the Jaumann derivative (see 4.3). Again, as is the case for the constitutive relationship for Newtonian viscous rheology
(2.1), deformation can be fully described in terms of deviators due to the absence of volumetric deformation in the incompressible formulation.
The constitutive eq. (30) shows that deformation of a Maxwell viscoelastic material depends on the relative contribution of the viscous and
elastic terms; their magnitudes, in turn, depend on three parameters: shear viscosity μ, elastic shear modulus G and time t. For the Earth
mantle, G is fairly constant, increasing by only one order of magnitude from the top to the bottom of the mantle; thus, the response is mostly
dependent on viscosity and loading rate. For a given loading rate, the magnitude of the viscosity μ determines whether elastic or viscous
response occurs. Due to the strong temperature-dependence of μ in mantle rocks (Karato & Wu 1993), we expect, on geological times,
viscous behaviour in the hot sublithospheric interior and elastic behaviour in the cold and thus many orders of magnitude higher viscous
lithospheric keels. The elastic contribution of the Maxwell material’s response can be quantified by the characteristic Maxwell relaxation time
which describes how long it takes for stress in the viscoelastic material to relax to 1/e of its original value after initial deformation.
μ(T )
.
(31)
tMaxwell =
G
The Maxwell time tMaxwell of the lithosphere is many orders of magnitude higher than that of the sublithospheric mantle and consequently
elastic stresses are preserved substantially longer inside the lithosphere.
For convenience, we introduce the additional non-dimensional parameter De, the Deborah number, which characterizes the viscoelastic
behaviour of a Maxwell material.
tMaxwell,ref .
μ̃0 κ̃
=
.
(32)
De =
G h̃ 2
tDiffusion
De is here the Maxwell viscoelastic relaxation time tMaxwell,ref. =
h̃ 2
μ̃0
G
at reference viscosity μ̃0 scaled by a characteristic time, here chosen to
be the thermal diffusion time tDiffusion = κ̃ to be consistent with our scaling (2.2). The term ‘Deborah number’ was first coined by Reiner
(1964) and was inspired by the statement ‘The mountains flowed before the lord’ of Deborah in the Bible (Judges 5:5), since De measures the
ability of a material to ‘flow’, that is, to deform by viscous creep. For the limiting case De = 0, the material behaves as a Newtonian liquid,
for De = ∞ as an elastic solid.
Using the Deborah number, we can write the non-dimensional form of (30) as
Dτi∗j
,
(33)
2μ∗ (T ∗ )ε̇i∗j = τi∗j + Deμ∗ (T ∗ )
Dt ∗
∗
∗
where De is multiplied by μ (T ) to account for the temperature-dependence of viscosity. Again, asterisks are omitted hereafter to facilitate
reading.
4.3 Jaumann invariant stress derivative
In (30),
Dτi j
Dt
denotes the invariant Jaumann (or co-rotational) stress derivative.
∂τi j
∂τi j
Dτi j
=
+ vk
− ωik τk j − ω jk τik ,
Dt
∂t
∂ xk
with ωi j being the vorticity tensor
1 ∂v j
∂vi
.
−
ωi j =
2 ∂ xi
∂xj
(34)
(35)
The Jaumann derivative (34) contains both stress advection and stress rotation terms (second and third/fourth terms on right-hand side,
respectively). In two dimensions, (34) spells out as
⎡
⎤⎡
⎡
⎤ ⎡
⎤⎡
⎤
⎤
2ωτx y
ω(τ yy − τx x )
ω
Dτ
Dτ Dτ ⎣ 0 −ω ⎦ ⎣ τx x τx y ⎦ ⎣ τx x τx y ⎦ ⎣ 0
⎦=
⎦,
=
−
+⎣
−
(36)
ω
0
ω(τ yy − τx x )
−ω 0
τx y τ yy
τx y τ yy
−2ωτx y
Dt Dt
Dt
C
2010 The Authors, GJI, 183, 35–63
C 2010 RAS
Journal compilation 44
M.J. Beuchert and Y.Y. Podladchikov
where Dτ /Dt denotes the material derivative of stresses
∂τi j
Dτi j
∂τi j
.
(37)
=
+ vk
Dt
∂t
∂ xk
The Jaumann invariant stress derivative is equivalent to a truncated Taylor series expansion of the stress rotation formula arising from solid
body rotation of the stress tensor or from a geometric state of stress analysis. This is shown in Appendix D.
4.4 FEM implementation
Due to the non-linearity of the advection and rotation terms contained in the Jaumann derivative (34), we choose an explicit time-incremental
approach for integration of these terms. According to the correspondence principle between viscoelastic and elastic media developed by Biot
(1955), transient analysis of viscoelastic media can be performed analogously to static analysis of elastic media using a time-incremental
approach with assumption of the viscoelastic medium being under initial stress (Biot 1965). The implementation of a Maxwell viscoelastic
rheology requires only minor modification in the FEM procedure. Yet, a requirement for this rheology is the computation of accurate solutions
for the stress field due to the stress ‘memory’ of elasticity. This is guaranteed by using, in our case, the iterative penalty function method, as
described in (3.2). The modified FEM stress equilibrium equation for a Maxwell viscoelastic rheology is [compare to upper row in (23) for
Newtonian viscous rheology]
2μ(T ) t
D Bv̄(n+1) d − BTvol Hp̄(n+1) d − Ra NT (T − T0 )ẑd
BT
t + Deμ(T )
Deμ(T )
(38)
(I + W) τ ∗(n) d ,
= − BT
t + Deμ(T )
where τ ∗ is a vector of advected deviatoric stresses [see (40)], I is the identity matrix, W the Jaumann stress rotation matrix and n denotes
successive time steps. For two dimensions, the stress vector is τ = { τx x τ yy τx y } at a given integration point. In (38), stress rotations
arising from vorticity are applied by pre-multiplying τ with the Jaumann stress rotation matrix W
⎤
⎡
⎤
⎡
0
0
2
0
0
2
⎥
⎢
⎥
⎢
⎢
⎢
0 −2 ⎥
0 −2 ⎥
W =⎢ 0
(39)
⎥ Bω v t.
⎥ω t = ⎢ 0
⎦
⎣
⎦
⎣
−1 1
0
−1 1
0
The velocity-vorticity transformation matrix Bω is defined in (A9), Appendix. The matrix coefficients in (39) result from recasting the
tensorial notation of stress in (36) into vectorial (Voigt) notation; this is generally done for convenience in FEM computations. We follow
the convention that stress rotation angles θ[rad] arising from time integration of vorticity θ = t ωdt(or θ = ω t for finite time steps) are
positive for counter-clockwise rotations.
Stress advection is performed by means of semi-Lagrangian characteristics in a procedure similar to the one described for heat advection
(see Section 3.3 for description of the algorithm), the only difference being that the advection grid here consists of integration points instead
of nodes. In the advection procedure, (i) characteristics are computed backward in time using a Runge–Kutta fourth-order scheme (see 3.3),
starting from the integration points, to points (x − t · v) within the integration point grid, (ii) stresses are interpolated to these points and
(iii) assigned to the integration points x the characteristics were shot from
τ ∗ (x)k+1 = τ (x −
t · v)k ,
(40)
where k denotes successive procedural steps. The Jaumann derivative (34) could alternatively be included in the left-hand side of (38) and thus
velocities would be obtained from an implicit formulation including the Jaumann terms, but the non-linearity of the advection and rotation
terms would cause difficulties in the solution. We thus chose to time-integrate the Jaumann terms explicitly by (i) applying the rotation
term only to the right-hand side in (38) and (ii) using semi-Lagrangian characteristics (40) for the advection term. To prevent substantial
disturbances to the stress equilibrium due to explicit stress rotations, we restrict the time step to allow only for small rotation angles per time
step, such that the stress equilibrium can be recovered in the subsequent time step.
4.5 Importance of stress advection and rotation
In contrast to a viscous rheology, at least part of the stresses are stored elastically in a viscoelastic model, the amount of which depends on
the (local) Maxwell relaxation time. Therefore, proper treatment of stress advection and rotation is of major importance when employing this
rheology. That stress advection is important is immediately obvious when considering the example of lateral drift of a lithospheric plate. If
stresses were not properly advected in a numerical model, the magnitude of elastic stresses within the model lithosphere would artificially
decay on lateral motion and this would clearly not be justifiable on physical grounds. Similarly, if stress rotation was not treated properly,
elastic stresses, for example, in a bending slab that exhibits solid body rotation on descent would be predicted incorrectly. Thus, whereas we
will show that the choice of the model for the invariant stress derivative is irrelevant for geodynamic simulations, adequate treatment of stress
advection and rotation is of utmost importance when stresses are to be predicted correctly.
C
2010 The Authors, GJI, 183, 35–63
C 2010 RAS
Journal compilation Viscoelasticity and lithospheric stresses
45
4.6 Choice of invariant stress derivative
The validity of using the Jaumann invariant stress derivative in geodynamic modelling is not unequivocal. Muhlhaus & Regenauer-Lieb
(2005) show that the Jaumann co-rotational derivative produces a spurious strain softening in simple shear for a Weissenberg number
Wei ≥ 1 where the Weissenberg number is defined as
μ(T )
γ̇ ,
(41)
G
with γ̇ = 2ε̇ being the strain rate. Figs 4 and 5 show the response of different stress derivatives [see Joseph (1990) or Kolymbas & Herle
(2003) for definition of various stress derivates] under simple shear.
For W ei ≥ 1, all of the included invariant stress derivatives exhibit unrealistic behaviour. Whereas the Jaumann derivative produces
geometrical strain softening for Wei = 1 (Fig. 4) and even oscillations for W ei > 1 (Fig. 5), modelling with upper and lower convected
derivatives results in extreme stress build-up (Fig. 4). Yet, for W ei ≤ 0.1, all models give almost identical results.
The decisive question is whether the unrealistic behaviour of the Jaumann invariant stress derivative for the relatively high Weissenberg
number regime is relevant in geodynamic simulations. We can investigate this question by computing typical ranges Weissenberg numbers
expected for the mantle depending on realistic viscosity and strain rate values for a fixed elastic shear modulus (Fig. 6). Since the elastic
W ei = tMaxwell γ̇ =
Figure 4. Non-dimensional stress response to loading under simple shear at Weissenberg number Wei = 1 and 0.1. At Wei = 1 (left) the Jaumann invariant stress
derivative produces spurious strain softening and the upper- and lower-convected derivatives (identical results in this setup) exhibit extreme stress built-up. For
Wei = 0.1 (right) all models deliver almost identical results.
Figure 5. Stress response (normalized) to constant loading under simple shear at Weissenberg numbers Wei = 0.1, 1, 10 (annotated to individual curves).
Whereas the models exhibit distinct behaviour for Wei ≥ 1, their response is almost identical for Wei ≤ 0.1. In this setup, lower- and upper-convected derivatives
give equivalent results for all Weissenberg numbers.
C
2010 The Authors, GJI, 183, 35–63
C 2010 RAS
Journal compilation 46
M.J. Beuchert and Y.Y. Podladchikov
shear modulus G varies only by about an order of magnitude throughout the depth of the mantle, the magnitude of the Weissenberg number
depends mostly on shear viscosity and strain rate, both of which vary by many orders of magnitude.
In general, high viscosities result in low strain rates and, on the other hand, high strain rates are only possible for relatively low
viscous mantle. For high viscosities, the viscoelastic model exhibits effectively elastic response and consequently cannot produce high strain
rates. For low viscosities, the model behaves effectively as a fluid and elastic stress derivatives are rendered irrelevant (see Section 4.2).
Consequently, the high Weissenberg number regime, for example, Wei ≥ 1, is supposedly never reached in the mantle (Fig. 6). Further, even
if high Weissenberg numbers were reached, plastic deformation would occur and introduce a stress limiter, thus superseding viscoelasticity
Figure 6. Weissenberg number as a function of strain rate γ̇ and viscosity μ for a fixed elastic shear modulus G = 1011 Pa.
Figure 7. Weissenberg number Wei in a thermal convection simulation for the upper mantle with Maxwell viscoelastic rheology. The Wei numbers in the
convecting lower part of the model are generally very low; thus, this part of the domain is dominated by viscous deformation. Only the highly viscous upper
part of the domain exhibits relatively high Wei numbers, that is, this part is dominated by elastic deformation. The low effective strain rates ε̇eff in the rigid
lithospheric part indicate that the choice of the invariant stress derivative is not important. Bottom heating Rayleigh number Ra = 2 × 107 , exponential
temperature-dependent viscosity with maximum viscosity ratio μr = μ(T min )/ μ(T max ) = 1010 .
C
2010 The Authors, GJI, 183, 35–63
C 2010 RAS
Journal compilation Viscoelasticity and lithospheric stresses
47
(Muhlhaus & Regenauer-Lieb 2005). Plastic yielding of materials is bounded by the so-called ultimate or Frenkel’s yield strength, which is
equal to one-tenth of the elastic shear modulus, i.e. G/10. In practice, other failure mechanisms cause catastrophic failure at around G/30
(Braeck & Podladchikov 2007; John et al. 2009). The Maxwell model assumes additive strains, but the same stress for both viscous and elastic
deformation mechanisms which renders τ > G/30 in Fig. 4 physically unreachable. Consequently, for the expected range of Weissenberg
numbers in geodynamic mantle simulations, the choice of the stress derivative model is not relevant. Naturally, the rotational terms in the
stress derivative are import, for example, when modelling subducting slabs which exhibit solid body rotation on descent, but the strain-related
terms contained in the upper and lower convected derivatives are negligible. To support the statement that the choice of the invariant stress
Figure 8. Magnitude of rheology factors in viscous (upper diagram) and viscoelastic (lower diagrams) rheology for a range of typical time steps t and
viscosity ratios μr ; note logarithmic scales. For the viscoelastic case, (a) and (b) are the viscous and elastic factors in the Maxwell viscoelastic rheology (42),
respectively. Whereas the factor 2μr for the viscous rheology attains a magnitude twice that of the maximum viscosity, the magnitude of the viscous factor in
the viscoelastic rheology (a) saturates at a relatively low level and the material behaves elastically; the elastic behaviour above a certain viscosity ratio can be
seen from the fact that the elastic factor (b) is 1 (log10 (1) = 0) for high μr ; thus, stresses τinj are fully ‘remembered’ in the successive time step τin+1
[compare
j
(42)].
Figure 9. Variation of the global FEM matrix conditioning number (extracted with the ‘condest’ function in Matlab) with increasing viscosity ratios μr .
Whereas the conditioning number increases to very large values for a viscous rheology (De = 0) without viscosity cut-off (blue), it saturates at a lower level
for the viscoelastic rheology (De = 10−8 , red). The penalty parameter is fixed at κ = 104 for this test.
C
2010 The Authors, GJI, 183, 35–63
C 2010 RAS
Journal compilation 48
M.J. Beuchert and Y.Y. Podladchikov
derivative is irrelevant for mantle simulations, we conducted a thermal convection simulation for the upper mantle (660 km) at Rayleigh
number Ra = 2 × 107 with high viscosity ratio μr = μ(T min )/μ(T max ) = 1010 and computed Weissenberg numbers Wei throughout the mantle
(Fig. 7). In the convecting, lower part of the model, Wei numbers are generally very low, such that the choice of the invariant stress derivative
is irrelevant. Only in the rigid, upper part of the model are Wei numbers relatively high, but here, hardly any deformation occurs (Fig. 7,
lowermost panel).
4.7 Modelling of large viscosity variations using a viscoelastic rheology
In viscous models, high viscosity ratios enter the global FEM coefficient matrix directly and can cause trouble for the solution of the system
of equations. Traditionally, this problem is avoided by either using low viscosity ratios (μr ≤ 105 ) (see e.g. Moore et al. 1998; Moresi &
Solomatov 1998b; Lenardic & Moresi 1999; Moore et al. 1999; Lenardic et al. 2000; Lenardic et al. 2003; O’Neill & Moresi 2003; Sleep
2003; Cooper et al. 2004; Cooper et al. 2006), or by introducing low viscosity cut-offs (see e.g. Ribe & Christensen 1994; Lenardic & Kaula
1996; Doin et al. 1997; de Smet et al. 1999; Shapiro et al. 1999). Whereas a viscosity ratio of 105 already seems quite high, our results
from simulations with that order of viscosity ratio show that it is, for example, not large enough to prevent craton erosion over hundreds of
Table 1. List of non-dimensional variables and parameters used in the text. The associated scaling relations are given in the last
column of the table where italic letters denote scales and bold letters denote variables or groups of variables to scale.
Variables
Symbol
SI units∗
Length
Viscosity
Heat diffusivity
Temperature difference throughout domain
Temperature
Pressure
Stress
Density
Time
Gravitational acceleration
Heat expansion coefficient
Specific heat capacity
h
μ0
κ
T
T
P
σ
ρ0
t
g
α
cp
m
Pa s
m2 s−1
K
K
Pa
Pa
Pa m−2 s2
s
m s−2
K−1
Jkg−1 K−1 = m2 K−1 s−2
Creep activation number
Rayleigh number
Internal heating Rayleigh number
Deborah number
Internal heating due to radioactive decay
Dissipation number
Ea /(RT02 )
ρ0 g α
ρ 0 g α Hr /cp
1/G
Hr /cp
g α /cp
K−1
Pa m−1 K−1
Pa m−1 s−1
Pa−1
K s−1
m−1
Non-dimensional form
1 -scale1 -scale1 -scale1 -scaleT ∗ = T −1 T
P∗ = μ0 −1 κ −1 h2 P
σ ∗ = μ0 −1 κ −1 h2 σ
ρ ∗ = μ−1 κ ρ 0
t∗ = h−2 κ t
g∗ = h3 κ −2 g
α∗ = T α
cp ∗ = h2 κ −2 T cp
Non-dimensional parameters
λ = T Ea /(RT02 )
Ra = μ0 −1 κ −1 h3 T ρ 0 g α
RaH = h5 μ0 −1 κ −2 ρ 0 g α Hr /cp
De = h−2 μ0 κ 1/ G
H = h2 κ −1 T −1 Hr /cp = RaH /Ra
Di = h g α /cp
Note: Since Pa is used as a scale, the SI unit kg is expressed in Pa as: kg = Pa m s2 .
Figure 10. Convergence test for different grid resolutions (given in the legends). Horizontally averaged effective stress (left) and pressure (right) profiles for
thermal convection simulation with Ra = 5 × 107 , μr = 109 and De = 10−9 after 10 Myr down to 300 km using the same setup as in Fig. 1. Looking at the
effective stress (left), we conclude that 525 × 351 gives sufficiently accurate results (green and blue curves coincide).
C
2010 The Authors, GJI, 183, 35–63
C 2010 RAS
Journal compilation Viscoelasticity and lithospheric stresses
49
millions of years within a vigorously convecting mantle (Beuchert et al. 2010). Even though application of extreme viscosity contrasts has
been realized in some numerical codes (Moresi & Solomatov 1995; Tackley 2008), it is still common practice to apply relatively low viscosity
ratios or to introduce a low viscosity cut-off (see references above). The question remaining with viscous models is always at which level
to set the required upper viscosity limit or cut-off. With a viscoelastic rheology, high viscosities ratios can be applied without encountering
numerical difficulties, since this rheology exhibits a physical transition from viscous to elastic behaviour above a certain level of viscosity
ratio. This property of the Maxwell viscoelastic rheology becomes apparent when solving (33) for stresses and discretizing the solution in
time. We obtain
2μ(T ) t
Deμ(T )
ε̇i n+1
τn,
=
+
(42)
τin+1
j
j
Deμ(T ) + t
Deμ(T ) + t i j
where t is the discrete time step between successive times n and n+1. In (42), temperature-dependent viscosities appear both in the
numerator and denominator, in contrast to a viscous constitutive equation, where τi j = 2μ(T )ε̇i j ; consequently, for high viscosity ratios
μr = μ(T min )/μ(T max ), the values partly cancel out in the viscoelastic rheology and the coefficients that enter the FEM matrices are
considerably lower than those for a viscous constitutive equation. Fig. 8 shows the resulting magnitude of coefficients for a range of relevant
(non-dimensional) time step sizes and viscosity ratio ranges.
The saturation of the viscous factor in the viscoelastic rheology (Fig. 8a) for large viscosity contrast shows that computational advantages
of using a viscoelastic rheology can be expected. To show the benefit of using a viscoelastic rheology as compared to a viscous rheology, we
use a simple test setup of a low temperature anomaly (Gauss normal distribution) with varying viscosity ratios μr that sinks down within the
mantle and solve for the instantaneous velocity field. With increasing viscosity ratio, the conditioning number of the assembled global FEM
matrix increases exponentially for the viscous rheology, whereas it remains at a moderate level for a viscoelastic rheology (Fig. 9).
4.8 Stress distribution within the lithosphere in a thermal convection model
As an application of the thermal convection code VEMAN presented in this paper, we showed the comparison of (effective) stress and pressure
distributions in the lithosphere for viscous and viscoelastic rheologies in Section 1.1 (Figs 1 and 2). The equations we are solving are the
Figure 11. Horizontally averaged effective stress below the model continental lithosphere (see Fig. 1 for setup of the simulations) after 100 Myr for different
Rayleigh numbers Ra = 107 , 5 × 107 and 108 and temperature-dependent viscosity ratios μr = 107 , 109 and 1011 . Top row: average effective stress curves for
given μr ; bottom row: average effective stress curves for given Ra. The Deborah number De was fixed at a constant value of 10−9 for all of these simulations.
C
2010 The Authors, GJI, 183, 35–63
C 2010 RAS
Journal compilation 50
M.J. Beuchert and Y.Y. Podladchikov
non-dimensional form of the stress equilibrium eq. (4)
∂τi∗j
∂ p∗
− ∗ − Ra(T ∗ − T0∗ )ẑ = 0,
∗
∂xj
∂ xi
(43)
using the constitutive equation for Maxwell viscoelasticity (33), here restated for convenience,
Dτi∗j
(44)
2μ∗ (T ∗ )ε̇i∗j = τi∗j + Deμ∗ (T ∗ )
Dt ∗
∗
∗
where Dτi j /Dt denotes the Jaumann invariant stress derivative as defined in (34), the continuity eq. (13) and the heat diffusion-advection
eq. (12). The stress equilibrium and heat diffusion-advection equations are integrated using an explicit time-stepping approach as presented
in 4.4 and 3.1, respectively. The continuity equation is enforced by means of the iterative penalty method presented in Section 3.2. We
employ a high viscosity ratio of μr = 109 which results in effectively elastic behaviour of the cold model lithosphere (initial cold anomaly
with low geothermal gradient) as shown by the significant stress accumulation inside the lithosphere and effectively viscous behaviour in
the sublithospheric convecting mantle as seen from the relatively low stress in this region. The fact that the significant difference in stress
distributions in the lithosphere and in the sublithospheric mantle are only apparent in the viscoelastic simulations (Figs 1 and 2, De > 0) clearly
demonstrates that a viscous rheology cannot reproduce correct stress distributions in the lithosphere, even if high viscosity ratios are employed,
as done in the example in Section 1.1. Stresses and pressure were scaled according to Table 1 using μ0 = 1021 Pa s, κ = 10−6 m2 s−1 and h =
2890 km. We used a grid resolution of 525 × 351 (number of gridpoints in horizontal and vertical direction, respectively) with grid
condensation towards the top and bottom boundaries. A convergence test using different grid resolutions (225 × 151, 375 × 251, 525 × 351
and 675 × 451) showed that 525 × 351 gives sufficiently accurate results (Fig. 10).
The thickness of the model continental lithosphere employed in the simulation corresponds to about 250 km, that is, to the maximum
thickness of cratonic continental lithosphere observed in seismic tomography (Polet & Anderson 1995). The effective elastic thickness (EET)
estimated for such cratons is up to 90 km (Burov & Diament 1995). Compared to the stress profiles shown in Fig. 2, this thickness would
correspond to a Deborah number De (as defined in (32)) of around 10−9 .
For a more quantitative exploration of the effect of elasticity on lithospheric stress distribution, we conducted a series of simulations
where we varied the Rayleigh number Ra and the temperature-dependent viscosity ratio μr independently. The results for average effective
stress and pressure below the model craton after 200 Myr are shown in Figs 11 and 12, respectively. As in Section 1.1, the model encompasses
the whole mantle depth (2890 km), but only the uppermost 660 km are shown so that effective stress and pressure inside the lithosphere are
clearly visible.
The results in Fig. 11 show that (i) for a given temperature-dependent viscosity ratio μr , the magnitude of the average effective lithospheric
stress increases with increasing Rayleigh number Ra (Fig. 11, top row), whereas (ii) for a given Ra, the thickness of the elastically responding
Figure 12. Same as Fig. 11, but for pressure.
C
2010 The Authors, GJI, 183, 35–63
C 2010 RAS
Journal compilation Viscoelasticity and lithospheric stresses
51
keel increases with increasing μr (Fig. 11, bottom row). Concerning (i): the increase of the magnitude of average effective stresses with Ra
explains from the enhanced vigour of the convective flow for higher Ra. It can be seen from the simulations in Fig. 1 which share the same
setup with the simulations presented in this section, that flow is dominated by edge-driven convection currents to the sides of the model
lithosphere. This flow is triggered by the lateral temperature gradients between cold lithosphere and hot convecting mantle. The higher the
Rayleigh number, the stronger are those edge-driven currents and consequently the stresses transmitted to the lithosphere. Concerning (ii):
the fact that the thickness of the elastically responding keel increases with μr indicates that the magnitude of μr is as important a factor for
the EET of the model lithosphere as the magnitude of the Deborah number De (the influence of which was demonstrated and discussed in
Section 1.1); for the simulations presented in Fig. 11, De was fixed at a constant value of 10−9 , yet the EET varies with μr . Concerning the
pressure (Fig. 12), we observe a similar dependence on Ra and μr as for the effective stress: the magnitude of the (negative) pressure increases
with increasing Ra, whereas the depth of the low (negative) pressure core increases with increasing μr .
5 BENCHMARKS
5.1 Incompressible limit
To check the accuracy of the iterative penalty method for incompressible flow in the computation of correct stress and pressure fields at the
incompressible limit, we compare our numerical solution with the analytical solution for pressure and effective stress around a rigid inclusion
developed by Schmid & Podladchikov (2003) from the analytical solution of Muschelišvili (1953). The result is presented in Fig. 13 where
we compare the results computed with the velocity-based formulation (a), with the mixed v-p formulation combined with the iterative penalty
Figure 13. Comparison of incompressible numerical solutions for pressure and effective stress around a rigid inclusion for (a) velocity-based FEM formulation
and (b) mixed velocity-pressure FEM formulation using iterative penalty method with (c) the analytical solution after Muschelišvili (1953); the code for the
analytical solution is taken from Schmid & Podladchikov (2002). We apply a pure shear velocity field and assume plane strain conditions. The applied penalty
factor κ in the numerical solutions is 103 . The purely velocity-based formulation (a) produces incorrect results both for pressure and effective stresses and the
pressure field further exhibits a spurious checkerboard pattern due to element locking. The iterative penalty method (b) yields accurate results for pressure and
effective stress fields.
C
2010 The Authors, GJI, 183, 35–63
C 2010 RAS
Journal compilation 52
M.J. Beuchert and Y.Y. Podladchikov
Figure 14. (a) Solid-body rotation test. (1) Initial (Gaussian) temperature distribution. (2–6) Temperature distribution after 5 (clockwise) rotations. (2) Contour
plot with four iso-lines for the final temperature distribution; colour responding to subplots: green – UPWIND, pink – EULER, black – MID-POINT, dashed
red – RK4. (3) The classical finite difference upwind advection scheme exhibits very strong numerical diffusion. Sub-time steps had to be applied to guarantee
stability of this scheme. (4) The simple Euler scheme poorly preserves the temperature maximum and cannot capture the curvature of the velocity field
accurately, thus causing artificial inward drift for equal time step size as in (5–6). (5–6) Semi-Lagrangian schemes midpoint and Runge–Kutta fourth-order
schemes yield the best results. (b) Shear cell test. Same conditions and interpretation as for (a). Temperature fields after 3 (clockwise) rotations. The plots
illustrate that the Runge–Kutta semi-Lagrangian schemes preserve temperature maxima and capture the curvature of the velocity fields better than the Eulerian
schemes; the latter aspect is best seen from (2) in (a) and (b), when comparing initial and final radial position of the temperature anomaly.
C
2010 The Authors, GJI, 183, 35–63
C 2010 RAS
Journal compilation Viscoelasticity and lithospheric stresses
53
method (b) and with the analytical solution (c). Use of a penalty parameter κ = K t = 103 (19) results in computation of a pressure field
with spurious checkerboard patterns and wrong effective stress solution in (a). In contrast, with the iterative penalty method (b), a penalty
parameter κ = 103 and four iterations were sufficient to obtain numerically divergence-free results (|div(v)| < 10−14 ) and to accurately predict
pressure and effective stress fields.
5.2 Heat advection
We tested the accuracy of the semi-Lagrangian scheme for temperature advection in solid body rotation and shear cell setups. In these tests,
constant velocity fields are prescribed. For solid body rotation, the velocity field around a point (x0 , y0 ) is given by
v(x, y) = (x − x0 )i − (y − y0 )j,
(45)
with unit vectors i and j pointing in x- and y-directions, respectively.
For the shear cell test, we prescribe
v(x, y) = − sin(π x) cos(π y)i + cos(π x) sin(π y)j.
(46)
The test results (Fig. 14) clearly demonstrate the superiority of the semi-Lagrangian methods (4, 5 and 6 in Fig. 14) over the classical
upwind scheme (3) which exhibits strong numerical diffusion. Whereas both the midpoint second order (also referred to as Runge–Kutta
second order) and the Runge–Kutta fourth-order accurate scheme deliver excellent results, the Euler first-order scheme exhibits considerable
numerical diffusion and cannot capture the curvature of the characteristics sufficiently well; the latter weakness results in artificial drift of the
temperature anomaly towards the domain centre for large time steps. The apparent lack of difference between midpoint and Runge–Kutta-4
is due to the time-invariance of the velocity field in these tests.
5.3 Thermal convection for iso-viscous and temperature-dependent viscosity fluids
We tested our FEM thermal convection code against the well-established thermal convection benchmark published in Blankenbach et al.
(1989). The benchmark is conducted on a square domain with fixed temperature at top (minimum temperature) and bottom boundaries
(maximum temperature), reflecting symmetry at the sides and zero traction (free slip) at all boundaries. We use a structured mesh that is
condensed at the top and bottom to properly resolve the dynamics of the thermal boundary layers. We compute the Nusselt number Nu as
described in Moresi & Solomatov (1995). The benchmark results are compiled in Table 2. We obtained a good agreement with the results
published in Blankenbach et al. (1989). The steady-state temperature fields for the benchmark runs and the time evolution of measured
geophysical quantities are presented in Fig. 15.
Table 2. Comparison of steady-state thermal convection results for Nusselt number Nu, rms velocity (v rms ) and heat fluxes q at the four corners; for the isoviscous cases (1a–c), only two values of q are listed due to diagonal symmetry.
Ra: Rayleigh number, μr : viscosity ratio μr = μ(T min )/μ(T max ) with temperaturedependent viscosity according to (15).
C
2010 The Authors, GJI, 183, 35–63
C 2010 RAS
Journal compilation Blankenbach et al. (1989)
This work
Error (per cent)
Ra = 104
(case 1a)
Nu
v rms
q1
q2
4.88
42.87
8.06
0.59
4.88
43.34
8.12
0.58
0.00
1.10
0.74
1.69
Ra = 105
(case 1b)
Nu
v rms
q1
q2
10.53
193.21
19.08
0.72
10.45
197.21
19.14
0.71
0.76
2.07
0.31
1.39
Ra = 106
(case 1c)
Nu
v rms
q1
q2
21.97
833.99
45.96
0.88
21.58
853.11
45.6
0.85
1.78
2.29
0.78
3.41
Ra = 107
μr = 103
(case 2a)
Nu
v rms
q1
q2
q3
q4
10.07
480.43
17.53
1.01
26.81
0.5
10.15
481.74
17.95
0.99
27.45
0.48
0.79
0.27
2.40
1.98
2.39
4.00
54
M.J. Beuchert and Y.Y. Podladchikov
5.4 Pure shear test for Maxwell viscoelastic rheology
We tested our viscoelastic FEM model against the analytical solution for stress built-up inside an elastic inclusion in a viscous matrix under
pure shear. The solution was first developed by Muschelišvili (1953) and applied to elastic layers in a viscous matrix by Schmid (2002). For
the case of elliptic inclusions, we combine the general solution for viscous inclusions with the viscoelastic solution in Schmid (2002) and
obtain an analytical solution applicable for the time-dependent stress evolution inside a viscoelastic inclusion embedded in a viscous matrix.
!
"#
(a + 1)2 −1 + exp − a2Gat
2 +1
ε̇x x ,
(47)
τx x (t) = −
a
Figure 15. Thermal convection benchmark. First row: Steady-state temperature distribution for Rayleigh numbers Ra = 104 , 105 , 106 (iso-viscous cases 1a,
b and c in Blankenbach et al. 1989) and Ra = 107 for temperature-dependent viscosity with viscosity ratio μr = 103 (case 2a). Maximum temperature: red,
minimum temperature: blue (see colour bar at the right). Rows 2–4: Nusselt number Nu, rms velocity V rms and heat fluxes q in the corners with steady-state
values (final state of simulation) stated above individual diagrams. Horizontal axis: non-dimensional time (shown in lowermost row).
C
2010 The Authors, GJI, 183, 35–63
C 2010 RAS
Journal compilation Viscoelasticity and lithospheric stresses
55
where a is the aspect ratio of the inclusion and the matrix viscosity is assumed to be unity. We can equally write (47) in a non-dimensional
form
!
"#
2at ∗
(a + 1)2 −1 + exp − De(a
2 +1)
ε̇x∗x ,
(48)
τx∗x (t) = −
a
with asterisks denoting non-dimensional quantities. For (47) or (48), respectively, to be applicable to our viscoelastic model, we prescribe a
high viscosity inside the inclusion (μinclusion = 105 ) and thus obtain an elastic response inside the inclusion. For the matrix, we apply a viscous
rheology with viscosity μmatrix = 1.
The test results (Fig. 16) show a good agreement of the numerical solution with the analytical solution. For time t → ∞, the solution for
stress inside the elastic inclusion converges towards the solution for stress inside a viscous inclusion (dashed horizontal line ‘viscous limit’
in Fig. 16).
5.5 Viscoelastic flow past a cylinder in a channel
We tested the flow code against a numerical benchmark for iso-viscous, viscoelastic flow past a circular cylinder in a channel. Fig. 17 shows
the domain setup and boundary conditions for this benchmark. The radius of the circular cylinder r = 1 is half the domain height and the
domain aspect ratio is 3:1. At the inflow and outflow boundaries, an established Poiseuille flow vx = 3(R2 –y2 )/(2R2 ) is imposed; vy = 0 at
the sides. Both upper and lower boundaries are fixed in y-direction. We apply no-slip boundary conditions at the top and along the cylinder
wall and free-slip (zero traction) conditions at the bottom (symmetry axis). For the inflow conditions on σ , we use the analytical solution for
simple shear of a Jaumann fluid, which is valid for Poiseuille flow. In that case, the Jaumann derivative equations are
τx x + 2Deωτx y = 0,
τ yy − 2Deωτx y = 0,
(49)
τx y + 2Deω(τ yy − τx x ) = 2με̇x y .
Figure 16. Stress built-up inside an elliptical elastic inclusion with aspect ratios a = 1, 2 and 5 embedded in a viscous matrix under constant pure shear
loading. Comparison of the analytical solution (48) with the numerical solution obtained in our FEM model for different values of Deborah number De =
10−4 , 3 × 10−4 and 10−3 at non-dimensional deviatoric strain rate ε̇x∗x = 1. Time and deviatoric stress τ xx are non-dimensional.
Figure 17. Setup for the benchmark of viscous flow past circular cylinder in a channel. The domain is symmetric about the horizontal axis and thus only the
upper half of the channel is modelled. See text for further explanations.
C
2010 The Authors, GJI, 183, 35–63
C 2010 RAS
Journal compilation 56
M.J. Beuchert and Y.Y. Podladchikov
Given that γ̇ = 2ε̇x y and ω = −1/2γ̇ for simple shear, we obtain from (49)
τx y =
2με̇x y
μγ̇
μγ̇
=
=
,
1 + 4De2 ω2
1 + 4De2 ω2
1 + 2De2 γ̇ 2
(50)
and can then solve for τ xx and τ yy by substituting (50) into (49). The strain rate γ̇ is given by ∂vx /∂ y, that is, by differentiating the inflow
condition vx = 3(R2 –y2 )/(2R2 ) with respect to y, resulting in γ̇ = −3y/R 2 at the inflow boundary.
For this benchmark, the non-dimensional drag force Cd exerted by the passing fluid on the cylinder wall is computed.
Cd = 2ex
c
σtot nc ds,
(51)
where ex is a unit vector in x-direction, σ tot the total stress, n;c a vector normal to the cylinder wall c and s the length of the cylinder wall.
The factor two is added, because Cd is computed along a full cylinder and only half of the cylinder is modelled in the symmetric (about the
Table 3. Comparison of our benchmark result for the drag coefficient Cd computed along the
cylinder wall with published results.
De = 0
Alves et al. (2001)
Etienne et al. (2006)
Dou & Phan-Thien (1999)
Fan et al. (1999)
Hulsen et al. (2005)
Sun et al. (1999)
Caola et al. (2001)
Huang (1999)∗
Liu et al. (1998)
Mitsoulis (1998)
Owens et al. (2002)
132.33
131.81
132.36
132.36
132.35
132.38
131.38
132.34
132.31
132.36
This study
132.72
0.01
0.025
0.05
0.1
0.2
132.34
132.31
132.21
132.16
131.50
131.79
131.75
131.08
130.34
130.22
129.72
130.36
130.36
130.33
126.62
126.53
126.41
126.62
126.63
126.63
132.71
132.63
132.37
131.34+
∗
Notes: = cited in Dou & Phan-Thien (1999), + = extrapolated from De = 0.09.
Figure 18. Drag coefficient Cd as a function of increasing Deborah number De. Since we use a regular, structured grid in contrast to previous authors to
conduct the benchmark, our solution for Cd is slightly higher than their results. Nevertheless, we obtain an acceptable agreement for low De numbers. Our
solution fails to converge from De = 0.1. Solid line: this study; other lines and symbols from previous studies as compiled in Table 3.
C
2010 The Authors, GJI, 183, 35–63
C 2010 RAS
Journal compilation Viscoelasticity and lithospheric stresses
57
Figure 19. Non-dimensional deviatoric stresses τ at De = 0 and De = 0.9 resulting from fluid flow past a cylinder in a channel. The benchmark is conducted
on a regular, structured grid at resolution 600 × 200 nodes.
horizontal base) test setup. Published results and the result from our computation are given in Table 3 and plotted in Fig. 18. Deviatoric stress
fields for viscous (De = 0) and viscoelastic (De = 0.9) simulations are shown in Fig. 19.
6 C O N C LU S I O N S
(1) The stress distribution within the lithosphere differs substantially between thermal convection models with viscous and viscoelastic
rheologies. Since a viscoelastic rheology is the more realistic choice for the lithosphere, a viscoelastic rheology has to be employed to
obtain accurate stress fields in the lithosphere. A further requirement for accurate computations of stresses in the Boussinesq approximation
is to guarantee divergence-free (incompressible) solutions for the velocity field. We achieve this by using mixed velocity-pressure FEM
formulations in combination with an iterative penalty method. Viscoelasticity and accurate stress computations are important pre-requisites
for modelling of processes like power-law creep, shear heating and plasticity, since those are stress-dependent and thus require accurate
predictions of stress fields.
(2) The implementation of a Maxwell viscoelastic rheology requires only minor modifications in the standard viscous FEM formulation.
Yet, whereas time derivatives of stress do not have to be dealt with in viscous models, the viscoelastic rheology requires implementation of
an invariant stress derivative, which includes stress advection and rotation.
(3) The choice of the invariant stress derivative is irrelevant given realistic ranges of Weissenberg numbers expected for the mantle.
(4) The viscoelastic rheology provides a physical transition from viscous to elastic response depending on the local value of viscosity ratio
in a numerical model. Thus, introduction of viscosity cut-offs can be avoided by using a viscoelastic rheology.
AC K N OW L E D G M E N T S
Marcus Beuchert was supported by research grant 163464 from the Norwegian Research Council. We thank Marcin Dabrowski for support
and technical discussions.
REFERENCES
Alves, M.A., Pinho, F.T. & Oliveira, P.J., 2001. The flow of viscoelastic fluids
past a cylinder: finite-volume high-resolution methods, J. Non-Newton.
Fluid Mech., 97, 207–232.
Bathe, K.J., 1996. Finite Element Procedures, 2nd edn, pp. 1037, Prentice
Hall, Englewood Cliffs, N.J.
Beuchert, M.J., Podladchikov, Y.Y., Simon, N.S.C. & Ruepke, L.H., 2010.
Modeling of craton stability using a viscoelastic rheology, J. geophys.
Res., in press, doi:10.1029/2009JB006482.
Biot, M.A., 1955. Dynamics of viscoelastic anisotropic media, in Proceed
C
2010 The Authors, GJI, 183, 35–63
C 2010 RAS
Journal compilation ings of Fourth Midwestern Conference on Soil Mechanics, Engineering
Experiment Station, Purdue University, Lafayette, IN.
Biot, M.A., 1965. Mechanics of Incremental Deformations: Theory of Elasticity and Viscoelasticity of Initially Stressed Solids and Fluids, Including
Thermodynamic Foundations and Applications to Finite Strain, 1st edn,
pp. 504, Wiley, New York.
Blankenbach, B. et al., 1989. A benchmark comparison for mantle convection codes, Geophys. J. R. astr. Soc., 98, 23–38.
Braeck, S. & Podladchikov, Y.Y., 2007. Spontaneous thermal runaway
as an ultimate failure mechanism of materials, Phys. Rev. Lett., 98,
doi:10.1103/PhysRevLett.98.095504.
58
M.J. Beuchert and Y.Y. Podladchikov
Burov, E.B. & Diament, M., 1995. The effective elastic thickness (Te ) of
continental lithosphere: what does it really mean?, J. geophys. Res., 100,
3905–3927.
Burov, E.B. & Molnar, R., 2008. Small and large-amplitude gravitational instability of an elastically compressible viscoelastic Maxwell solid overlying an inviscid incompressible fluid: dependence of growth rates on wave
number and elastic constants at low Deborah numbers, Earth planet. Sci.
Lett., 275, 370–381.
Caola, A.E., Joo, Y.L., Armstrong, R.C. & Brown, R.A., 2001. Highly parallel time integration of viscoelastic flows, J. Non-Newton. Fluid Mech.,
100, 191–216.
Christensen, U.R. & Yuen, D.A., 1985. Layered convection induced by phase
transitions, J. geophys. Res., 90, 291–300.
Cooper, C.M., Lenardic, A., Levander, A. & Moresi, L., 2006. Creation and
preservation of cratonic lithosphere; seismic constraints and geodynamic
models.; Archean geodynamics and environments, Geophys. Monogr.,
164, 75–88.
Cooper, C.M., Lenardic, A. & Moresi, L., 2004. The thermal structure of
stable continental lithosphere within a dynamic mantle, Earth planet. Sci.
Lett., 222, 807–817.
Crameri, F. & Kaus, B.J.P., 2010. Parameters that control lithosphericscale thermal localization on terrestrial planets, Geophys. Res. Lett., 37,
doi:10.1029/2010GL042921.
Cuvelier, C., Segal, A. & Steenhoven, A.A.v., 1986. Finite Element Methods
and Navier-Stokes Equations, 1st edn, pp. 483, Reidel, Dordrecht.
Dabrowski, M., Krotkiewski, M. & Schmid, D.W., 2008. MILAMIN:
MATLAB-based finite element method solver for large problems,
Geochem. Geophys. Geosyst., 9, doi:10.1029/2007GC001719.
de Smet, J.H., van den Berg, A.P. & Vlaar, N.J., 1999. The evolution of continental roots in numerical thermo-chemical mantle convection models
including differentiation by partial melting. in Composition, Deep Structure and Evolution of Continents., pp. 153–170, eds van der Hilst Rob, D.
& McDonough William, F., Elsevier International, Amsterdam.
Doin, M.P., Fleitout, L. & Christensen, U., 1997. Mantle convection and
stability of depleted and undepleted continental lithosphere, J. geophys.
Res., 102, 2771–2787.
Dou, H.S. & Phan-Thien, N., 1999. The flow of an Oldroyd-B fluid past a
cylinder in a channel: adaptive viscosity vorticity (DAVSS-omega) formulation, J. Non-Newton. Fluid Mech., 87, 47–73.
Etienne, J., Hinch, E.J. & Li, J., 2006. A Lagrangian-Eulerian approach for
the numerical simulation of free-surface flow of a viscoelastic material,
J. Non-Newton. Fluid Mech., 136, 157–166.
Fan, Y.R., Tanner, R.I. & Phan-Thien, N., 1999. Galerkin/least-square finiteelement methods for steady viscoelastic flows, J. Non-Newton. Fluid
Mech., 84, 233–256.
Fortin, M., 1981. Old and new finite-elements for incompressible flows, Int.
J. Numer. Methods Fluids, 1, 347–364.
Fowler, A.C., 1985. Fast thermoviscous convection, Stud. Appl. Math., 72,
189–219.
Fowler, A.C., 1993. Boundary layer theory and subduction, J. geophys. Res.,
98, 21 997–22 005.
Furuichi, M., Kameyama, M. & Kageyama, A., 2008. Three-dimensional
Eulerian method for large deformation of viscoelastic fluid: toward platemantle simulation, J. Comput. Phys., 227, 4977–4997.
Harder, H., 1991. Numerical-simulation of thermal-convection with
Maxwellian viscoelasticity, J. Non-Newton. Fluid Mech., 39, 67–
88.
Hulsen, M.A., Fattal, R. & Kupferman, R., 2005. Flow of viscoelastic fluids
past a cylinder at high Weissenberg number: stabilized simulations using
matrix logarithms, J. Non-Newton. Fluid Mech., 127, 27–39.
John, T., Medvedev, S., Rupke, L.H., Andersen, T.B., Podladchikov, Y.Y. &
Austrheim, H., 2009. Generation of intermediate-depth earthquakes by
self-localizing thermal runaway, Nat. Geosci., 2, 137–140.
Joseph, D.D., 1990. Fluid Dynamics of Viscoelastic Liquids, 1st edn, pp.
755, Springer, New York.
Karato, S. & Wu, P., 1993. Rheology of the upper mantle: a synthesis,
Science, 260, 771–778.
Kaus, B.J.P. & Becker, T.W., 2007. Effects of elasticity on the Rayleigh-
Taylor instability: implications for large-scale geodynamics, Geophys. J.
Int., 168, 843–862.
Kolymbas, D. & Herle, I., 2003. Shear and objective stress rates in hypoplasticity, Int. J. Numer. Anal. Methods Geomech., 27, 733–744.
Kusznir, N.J. & Bott, M.H.P., 1977. Stress-concentration in upper lithosphere
caused by underlying viscoelastic creep, Tectonophysics, 43, 247–256.
Kusznir, N.J. & Park, R.G., 1984. Intraplate lithosphere deformation and the
strength of the lithosphere, Geophys. J. R. astr. Soc., 79, 513–538.
Lenardic, A., Jellinek, A.M. & Moresi, L.N., 2008. A climate induced transition in the tectonic style of a terrestrial planet, Earth planet. Sci. Lett.,
271, 34–42.
Lenardic, A. & Kaula, W.M., 1996. Near-surface thermal/ chemical boundary layer convection at infinite Prandtl number: two-dimensional numerical experiments, Geophys. J. Int., 126, 689–711.
Lenardic, A., Moresi, L. & Muehlhaus, H., 2000. The role of mobile belts
for the longevity of deep cratonic lithosphere: the crumple zone model,
Geophys. Res. Lett., 27, 1235–1238.
Lenardic, A. & Moresi, L.N., 1999. Some thoughts on the stability of cratonic lithosphere: effects of buoyancy and viscosity, J. geophys. Res., 104,
12 747–12 759.
Lenardic, A., Moresi, L.N. & Muehlhaus, H., 2003. Longevity and stability
of cratonic lithosphere: insights from numerical simulations of coupled
mantle convection and continental tectonics, J. geophys. Res., 108, 15,
doi:10.1029/2002JB001859.
Li, Z.Y. & Khayat, R.E., 2005a. Finite-amplitude Rayleigh-Benard convection and pattern selection for viscoelastic fluids, J. Fluid Mech., 529,
221–251.
Li, Z.Y. & Khayat, R.E., 2005b. Three-dimensional thermal convection of
viscoelastic fluids, Phys. Rev. E, 71, doi:10.1103/PhysRevE.71.066305.
Liu, A.W., Bornside, D.E., Armstrong, R.C. & Brown, R.A., 1998. Viscoelastic flow of polymer solutions around a periodic, linear array of
cylinders: comparisons of predictions for microstructure and flow fields,
J. Non-Newton. Fluid Mech., 77, 153–190.
Lowman, J.P. & Jarvis, G.T., 1996. Continental collisions in wide aspect ratio
and high Rayleigh number two-dimensional mantle convection models,
J. geophys. Res., 101, 25 485–25 497.
Lowman, J.P. & Jarvis, G.T., 1999. Effects of mantle heat source distribution
on supercontinent stability, J. geophys. Res., 104, 12 733–12 746.
Marques, F.O. & Podladchikov, Y.Y., 2009. A thin elastic core can control
large-scale patterns of lithosphere shortening, Earth planet. Sci. Lett.,
277, 80–85.
Mitsoulis, E., 1998. Numerical simulation of confined flow of polyethylene
melts around a cylinder in a planar channel, J. Non-Newton. Fluid Mech.,
76, 327–350.
Moore, W.B., Schubert, G. & Tackley, P., 1998. Three-dimensional simulations of plume-lithosphere interaction at the Hawaiian swell, Science,
279, 1008–1011.
Moore, W.B., Schubert, G. & Tackley, P.J., 1999. The role of rheology
in lithospheric thinning by mantle plumes, Geophys. Res. Lett., 26,
1073–1076.
Moresi, L., Dufour, F. & Muhlhaus, H.B., 2002. Mantle convection modeling with viscoelastic/brittle lithosphere: numerical methodology and plate
tectonic modeling, Pure appl. Geophys., 159, 2335–2356.
Moresi, L., Dufour, F. & Muhlhaus, H.B., 2003a. A Lagrangian integration
point finite element method for large deformation modeling of viscoelastic geomaterials, J. Comput.Phys., 184, 476–497.
Moresi, L., May, D., Freeman, J. & Appelbe, B., 2003b. Mantle convection
modeling with viscoelastic/brittle lithosphere: numerical and computational methodology, Comput. Sci., 2659, 781–787.
Moresi, L., Quenette, S., Lemiale, V., Meriaux, C., Appelbe, B. & Muhlhaus,
H.B., 2007. Computational approaches to studying non-linear dynamics
of the crust and mantle, Phys. Earth planet. Inter., 163, 69–82.
Moresi, L. & Solomatov, V., 1998a. Mantle convection with a brittle lithosphere: thoughts on the global tectonic styles of the Earth and Venus,
Geophys. J. Int., 133, 669–682.
Moresi, L. & Solomatov, V., 1998b. Mantle convection with a brittle lithosphere: thoughts on the global tectonic styles of the Earth and Venus,
Geophys. J. Int., 133, 669–682.
C
2010 The Authors, GJI, 183, 35–63
C 2010 RAS
Journal compilation Viscoelasticity and lithospheric stresses
Moresi, L.N. & Solomatov, V.S., 1995. Numerical investigation of 2d
convection with extremely large viscosity variations, Phys. Fluids, 7,
2154–2162.
Moser, J., Matyska, C., Yuen, D.A., Malevsky, A.V. & Harder, H., 1993.
Mantle rheology, convection and rotational dynamics, Phys. Earth planet.
Inter., 79, 367–381.
Muhlhaus, H.B. & Regenauer-Lieb, K., 2005. Towards a self-consistent plate
mantle model that includes elasticity: simple benchmarks and application
to basic modes of convection, Geophys. J. Int., 163, 788–800.
Muschelišvili, N.I., 1953. Some Basic Problems of the Mathematical Theory
of Elasticity: Fundamental Equations, Plane Theory of Elasticity, Torsion
and Bending, 1st edn, pp. 704, P. Noordhoff, Groningen.
O’Neill, C.J. & Moresi, L.N., 2003. How long can diamonds remain stable
in the continental lithosphere? Earth planet. Sci. Lett., 213, 43–52.
Owens, R.G., Chauvière, C. & Philips, T.N., 2002. A locally-upwinded spectral technique (LUST) for viscoelastic flows, J. Non-Newton. Fluid Mech.,
108, 49–71.
Pelletier, D., Fortin, A. & Camarero, R., 1989. Are fem solutions of incompressible flows really incompressible–(or how simple flows Can cause
headaches), Int. J. Numer. Methods Fluids, 9, 99–112.
Podladchikov, Y., Lenardic, A., Yuen, D.A. & Quareni, F., 1993. Dynamical
consequences of stress focussing for different rheologies: earth and Venus
perspectives, EOS, Trans. Am. geophys. Un., 74, 566.
Polet, J. & Anderson, D.L., 1995. Depth extent of cratons as inferred from
tomographic studies, Geology, 23, 205–208.
Poliakov, A., Cundall, P., Podladchikov, Y.Y. & Laykhovsky, V., 1993. An
explicit inertial method for the simulation of visco-elastic flow: an evaluation of elastic effects on diapiric flow in two- and three- layers models, in
Flow and Creep in the Solar System: Observations, Modeling and Theory,
pp. 175–195, eds Stone, D.B. & Runcorn, S.K., Kluwer, Dordrecht.
Poliakov, A. & Podladchikov, Y., 1992. Diapirism and topography, Geophys.
J. Int., 109, 553–564.
Popov, A.A. & Sobolev, S.V., 2008. SLIM3D: a tool for three-dimensional
thermo mechanical modeling of lithospheric deformation with elastovisco-plastic rheology, Phys. Earth planet. Inter., 171, 55–75.
Press, W.H., 1992. Numerical Recipes in C: the Art of Scientific Computing,
2nd edn, pp. 994, Cambridge University Press, Cambridge.
Reiner, M., 1964. The Deborah number, Physics Today, 17, 62.
Ribe, N.M. & Christensen, U.R., 1994. 3-dimensional modeling of plumelithosphere interaction, J. geophys. Res., 99, 669–682.
Schmalholz, S.M., Podladchikov, Y.Y. & Schmid, D.W., 2001. A spectral/finite difference method for simulating large deformations of heterogeneous, viscoelastic materials, Geophys. J. Int., 145, 199–208.
Schmeling, H. et al., 2008. A benchmark comparison of spontaneous subduction models: towards a free surface, Phys. Earth planet. Inter., 171,
198–223.
Schmid, D.W., 2002. Finite and infinite heterogeneities under pure and simple shear, PhD thesis, ETH, Zurich (unpublished).
59
Schmid, D.W. & Podladchikov, Y.Y., 2002. Muskhelishvili’s method applied to elliptical and lubricated circular inclusions in general shear.
Solution implementation in MATLAB, ETH, Eidgenössische Technische
Hochschule Zürich, Geologisches Institut, Zurich, doi:10.3929/ethz-a004398265.
Schmid, D.W. & Podladchikov, Y.Y., 2003. Analytical solutions for deformable elliptical inclusions in general shear, Geophys. J. Int., 155,
269–288.
Shapiro, S.S., Hager, B.H. & Jordan, T.H., 1999. Stability and dynamics of
the continental tectosphere. in Composition, Deep Structure and Evolution of Continents, pp. 115–133, eds van der Hilst Rob, D. & McDonough
William, F., Elsevier International, Amsterdam.
Sleep, N.H., 2003. Survival of Archean cratonal lithosphere, J. geophys.
Res., 108, doi:10.1029/2001JB000169.
Solomatov, V.S., 2004. Initiation of subduction by small-scale convection,
J. geophys. Res., 109, doi:10.1029/2003JB002628.
Solomatov, V.S. & Moresi, L.N., 1996. Stagnant lid convection on Venus,
J. geophys. Res., 101, 4737–4753.
Solomatov, V.S. & Moresi, L.N., 2000. Scaling of time-dependent stagnant
lid convection: application to small-scale convection on Earth and other
terrestrial planets, J. geophys. Res., 105, 21 795–21 817.
Spiegelman, M., 2004. Myths and Methods in Modeling, LDEO, Columbia
University, http://www.ldeo.columbia.edu/∼mspieg/mmm/ (last accessed
2010 July 31).
Sun, J., Smith, M.D., Armstrong, R.C. & Brown, R.A., 1999. Finite element
method for viscoelastic flows based on the discrete adaptive viscoelastic
stress splitting and the discontinuous Galerkin method: DAVSS-G/DG, J.
Non-Newton. Fluid Mech., 86, 281–307.
Tackley, P.J., 1996. Effects of strongly variable viscosity on threedimensional compressible convection in planetary mantles, J. geophys.
Res., 101, 3311–3332.
Tackley, P.J., 2008. Modelling compressible mantle convection with large
viscosity contrasts in a three-dimensional spherical shell using the yinyang grid, Phys. Earth Planet. Inter., 171, 7–18.
Turcotte, D.L. & Schubert, G., 2002. Geodynamics, 2nd edn, pp. 456, Cambridge, Cambridge.
Vasilyev, O.V., Podladchikov, Y.Y. & Yuen, D.A., 2001. Modelling of viscoselastic plume-lithosphere interaction using the adaptive multilevel
wavelet collocation method, Geophys. J. Int., 147, 579–589.
Zhong, S.J., Gurnis, M. & Moresi, L., 1996. Free-surface formulation of
mantle convection .1. Basic theory and application to plumes, Geophys.
J. Int., 127, 708–718.
Zienkiewicz, O.C. & Taylor, R.L., 2000. The Finite Element Method, 5th
edn, pp. 689, Butterworth-Heinemann, Oxford.
Zienkiewicz, O.C., Vilotte, J.P., Toyoshima, S. & Nakazawa, S., 1985. Iterative Method for Constrained and Mixed Approximation–an Inexpensive
Improvement of FEM Performance, Comput. Methods appl. Mech. Eng.,
51, 3–29.
APPENDIX A: THE FINITE ELEMENT METHOD
The Finite Element Method (FEM) has several advantages that we outline briefly before giving a short introduction to the method. (i) The
FEM offers a systematic approach of assembling a linear system of equations for discretized dynamic problems. (ii) The Galerkin FEM
yields symmetric, positive-definite matrices that can be solved efficiently using standard direct solvers. (iii) Due to iso-parametric mapping
using the Jacobian operator, the conservation equations can be solved on varying (non-overlapping) mesh geometries, thus enabling, for
example, to step from computation on a rectangular domain to a spherical (annular) domain simply by delivering a different mesh geometry
(see Appendix C for the example of employing an annular FEM grid). (iv) The FEM enables to achieve the numerical satisfaction of the
incompressibility requirement for incompressible flows by means of mixed velocity-pressure formulations, a requirement that cannot easily be
fulfilled with other approaches like, for example, finite differences method (FDM). Use of the mixed formulation further enables computation
of correct stress and pressure fields for incompressible media, which poses difficulties with other approaches, and which is an important
pre-requisite for studying processes where accurate stress solutions are important, for example, power-law creep, shear heating and plasticity.
(v) Implementation of free boundaries is comparatively easily achieved in FEM, but difficult to realize with other numerical methods.
To solve a set of PDEs G(v,T) = 0 as, for example, given in (12)–(14) for unknown velocities v and temperatures T by means of the
FEM, we integrate the PDEs over the domain and, instead of requiring the PDEs to equal zero, the integral expression is required to be
zero. For integration of a function which we only know the differentials of, we need to supply integral bounds g(v,T) = f for the integral
C
2010 The Authors, GJI, 183, 35–63
C 2010 RAS
Journal compilation 60
M.J. Beuchert and Y.Y. Podladchikov
function at least at parts of the domain boundaries .
+
G(v, T)d
g(v, T)d = 0.
(A1)
For the PDEs given in (12)–(14), both Dirichlet (values of v and T at the domain boundaries) and Neumann boundary conditions (first
derivative of v and T) have to be specified, since those PDEs are functions of second order. For steady-state solutions, boundary conditions
have to be supplied along the entire domain boundary, and for transient problems at least along parts of the boundary. In general, Neumann
boundary conditions arise naturally (equal zero) on assembly of the global matrices in FEM, and thus only Dirichlet boundary conditions
have to be supplied.
The system of equations (A1) cannot yet be solved for v and T at any discrete point within the domain, for we only know (prescribe)
the functions at the boundaries. The basic idea of the FEM approach is thus to (i) discretize the domain into finite elements and (ii) use
some known, spatially varying auxiliary shape (interpolation) functions N(x,y), where x and y are coordinates (for two dimensions), and
their derivatives to find an approximate linear system of equations for unknowns a (in our case for v and T) at the element nodes. (iii) From
the equations arising on the element level, a global linear system of equations is assembled that contains a matrix K of known coefficients,
resulting from integration of the shape functions, and a vector of boundary conditions b
Ka + b = 0
(A2)
and (iv) this global system of equations is solved for a vector of unknowns a (v and T in our case).
In step (ii), the FEM asserts that unknown spatial functions a, for example, velocity or temperature fields v or T, can be approximated
(ã is the approximate solution and ā the unknown solution at a node) by a set of known shape functions N
nn
Ni (x, y)āi = N(x, y)ā,
(A3)
a(x, y) ≈ ã(x, y) =
i=1
where i is the node index and nn the number of nodes, either for an individual element (local domain) or the entire (global) domain, and N
is a vector containing the shape function values at discrete points in the domain. Analogous to (A3) and omitting the spatial dependence, we
can state for the derivatives
nn
∂ ã ∂ Ni
∂N
∂a
≈
=
āi =
ā.
(A4)
∂x
∂x
∂
x
∂x
i=1
Substitution of (A3) into (A1) yields
G(Nā)d
+
g(Nā)d = 0,
(A5)
where G and g are differential operators. If we use the same shape functions N for each equation in the system of equations (A5), the system
is underdetermined. To obtain a determinate system of equations (square matrix), specific functions wT have to be applied as weighting
functions. The Galerkin FEM method employs the transpose of the shape functions NT as weighting functions, that is, wT = NT ; thus, the
same shape functions that are used for interpolation (A3) serve as weighting functions.
NT G(Nā)d
+
NT g(Nā)d = 0.
(A6)
The resulting vector product NT N always produces symmetric matrices, a feature that is advantageous in the solution process. For this and
various other reasons, the Galerkin approach is generally preferred in FEM analysis (Zienkiewicz & Taylor 2000).
In the following, some FEM matrices referred to in Sections 3.2 and 4.4, respectively, are given. Matrices B and Bvol are defined as
follows (for two dimensions),
⎤
⎡
∂ N1
0
···
⎥
⎢ ∂x
⎥
⎢
⎥
⎢
∂
N
1
⎥
⎢ 0
·
·
·
B=⎢
⎥
∂
y
⎥
⎢
⎥
⎢ ∂N
∂
N
1
1
⎣
···⎦
,
∂y
∂x
⎤
⎡ ∂N
1
0
···
⎥
⎢ ∂x
⎥,
(A7)
Bvol = ⎢
∂ N1
⎦
⎣
···
0
∂y
where ∂ Nn /∂ xi are shape function derivatives at a given node n. The rheology matrix D for plane strain is defined as
⎤
⎡ 4
2
−
0
⎥
⎢ 3
3
⎥
⎢
⎥
⎢
2
4
D = ⎢−
0⎥.
⎦
⎣ 3
3
0
0
(A8)
1
C
2010 The Authors, GJI, 183, 35–63
C 2010 RAS
Journal compilation Viscoelasticity and lithospheric stresses
The Bω matrix employed for the implementation of viscoelastic rheology (Section 4.4) transforms velocity into vorticity.
⎤
⎡
1 ∂ N1
−
0
·
·
·
⎥
⎢ 2 ∂y
⎥
Bω = ⎢
⎦
⎣
1 ∂ N1
···
0
2 ∂x
61
(A9)
A P P E N D I X B : I N T E R N A L H E AT I N G B Y R A D I O A C T I V E D E C AY A N D V I S C O U S
S H E A R H E AT I N G
The thermal energy eq. (2) can be extended to include internal heating due to decay of radioactive elements and viscous shear heating. Yet, if
we introduce shear heating, we also have to introduce heating by adiabatic compression in order to be consistent, since both terms are of the
same order, and obtain the ‘extended Boussinesq approximation’ with the modified thermal energy equation (Christensen & Yuen 1985)
αT0 Dp
∂
∂T
1
1
DT
−
=
κ
+ Hr +
τi j ε̇i j ,
(B1)
Dt
ρ0 c p Dt
∂ xi
∂ xi
cp
ρ0 c p
where cp is the specific heat capacity under constant pressure, Hr the internal heating rate due to decay of radioactive elements in the mantle
and ρ 0 the reference density at the bottom temperature T0 .
Assuming near-hydrostatic conditions, we can write
Dp
≈ ρ0 gvi ẑ,
(B2)
Dt
with ẑ being a unit vector in vertical direction, and thus can approximate (B1) by
1
αT0 g
DT
∂T
1
∂
τi j ε̇i j +
vi ẑ.
(B3)
κ
+ Hr +
=
Dt
∂ xi
∂ xi
cp
ρ0 c p
cp
Non-dimensionalization of (B3) results in two additional non-dimensional parameters, an internal heating parameter H and a dissipation
number Di.
Ra H
Hr h̃ 2
,
(B4)
=
H=
Ra
c p κ̃ T̃
Di =
αg h̃
,
cp
(B5)
where RaH is the internal heating Rayleigh number.
Ra H =
ρ0 gα Hr h̃ 5
.
c p μ̃0 κ̃ 2
On non-dimensionalization and substitution of the non-dimensional parameters H and Di into (B3), we obtain
DT
∂2T ∗
1 ∗ ∗
∗
τ
=
+
H
+
Di
ε̇
+
v
ẑ
,
i
Dt ∗
Ra i j i j
∂ xi∗2
(B6)
∗
(B7)
for the case T0 / T = 1. Whereas shear heating can generally be neglected for relatively low viscosities as, for example, in the asthenosphere,
its importance increases when high viscosities are involved (Turcotte & Schubert 2002). Thus, for the deep part of the lithosphere, at the
transition from elastic to viscous deformation, shear heating effects might be important.
In an explicit approach, the FEM formulation of the modified thermal energy eq. (B7) requires only modification of the right-hand side
of (18).
∂NT ∂N
T
T̄n+1 d
N N+ t
∂x ∂x
1 n n
(B8)
τ ε̇ + vn ẑ d ,
=
NT NTn d + t NT H + Di
Ra
where τ , ε̇ and v are evaluated at the integration points. The heat advection term contained in the material derivative in (B7) is, as described
in Section 3, integrated by semi-Lagrangian backward in time characteristics.
A P P E N D I X C : M O D E L L I N G O F C O N V E C T I O N O N A C Y L I N D R I C A L A N N U LU S
Another step to more realistic modelling of mantle convection is application of a more realistic grid geometry. One of the advantages of
the FEM is its ability to comply with varying (non-overlapping) grid geometries. By providing a different grid geometry and changing the
direction of body forces, we can readily integrate the equivalent governing equations, for example, on an annular grid. Thus, in principle,
modelling convection on a cylinder slice (under plane strain assumption) can simply be carried out by supplying an annular grid geometry
and adjusting the direction of the gravity vector field to point towards the centre of the annulus. Yet, when using a structured grid, we observed
C
2010 The Authors, GJI, 183, 35–63
C 2010 RAS
Journal compilation 62
M.J. Beuchert and Y.Y. Podladchikov
Figure C1. (a) Absolute initial velocity field in a thermal convection simulation with constant maximum and minimum temperature at the inner and outer
boundaries, respectively. Constant viscosity simulation initialized with T init = 1/2(T max +T min ); no random noise is added. Rayleigh number Ra = 105 . The
grid is condensed towards the inner and outer boundaries. Given the lack of thermal boundary layers in this initial phase of the simulation, the absolute velocity
field is expected to be close to zero. Yet, with a structured annular grid, we observe a systematic deviation from the correct solution for the absolute initial
maximum velocity. (b) Convergence test for the absolute initial velocity field using bi-quadratic nine-node elements in different grid geometries. Shown is the
maximum of the absolute initial velocity field as a function of radial grid resolution. Whereas the rectangular grid gives the correct solution (numerical zero) for
all grid resolutions investigated, the solution for the annular grid shows a dependence on the radial grid resolution. The solution converges faster with straight
element edges (fourth-order convergence) than with curved element edges (mid-side and central node not aligned with corner nodes; third-order convergence).
deviations from the expected solution for the initial velocity fields (Fig. C1a). To exclude coding errors, we conducted a convergence test.
The test results (Fig. C1b) show that the error decays exponentially with increasing radial grid resolution. This indicates that the deviations
arise from the grid distortion associated with the cylindrical annulus grid geometry.
The exponents in the fitting functions for annular grids with kinked and straight element edges (annotated to fit lines in Fig. C1b) show
that the convergence is faster for straight element edges (∼ fourth-order convergence) than for curved ones (∼ third-order convergence). This
observation is consistent with the generally described lower order of exact velocity solutions for quadratic curved-edge element distortion
(Bathe 1996). Since these errors are shown to disappear with higher grid resolutions, use of the structured annular grid is admissible. Further,
the relative contribution of the error associated with the structured annular grid to the total velocity field is significantly smaller once thermal
boundary layers with associated strong buoyancy forces have developed in the thermal convection simulations. Thus, during the subsequent
course of the simulation, the error due to grid distortion is negligible. Similarly, when a strong degree of random noise is added on top of
the initial temperature field, the error vanishes due to the generally much higher initial velocity fields resulting from the stronger random
perturbation.
A P P E N D I X D : D E R I VAT I O N O F J AU M A N N D E R I VAT I V E F R O M S T R E S S R O TAT I O N
FORMULA
The Jaumann co-rotational derivative is shown here to be a truncated Taylor series expansion of simple stress rotation formula. These can be
obtained from a state of stress analysis based on geometric considerations (Biot 1965; Turcotte & Schubert 2002). The stress tensor τ can be
transformed according to
τ = Rτ R ,
T
(D1)
with prime denoting the transformed stress tensor and R denoting the finite solid body rotation matrix. In a 2-D Cartesian reference frame,
counter-clockwise rotation is given by
⎡
⎤
cos θ
sin θ
⎦,
R =⎣
(D2)
− sin θ cos θ
where θ = ωdt is a finite rotation angle (or θ = ω t for finite time steps t). Substituting (D2) into (D1) results in
⎡
τ = ⎣
⎡
t
cos θ
sin θ
− sin θ
cos θ
⎤⎡
⎦⎣
τx x
τx y
τx y
τ yy
⎤⎡
⎦⎣
τx x cos2 θ + τ yy sin2 θ + τx y sin 2θ
⎢
=⎢
⎣ 1
(τ yy − τx x ) sin 2θ + τx y cos 2θ
2
cos θ
− sin θ
sin θ
cos θ
⎤
⎦
⎤
1
(τ yy − τx x ) sin 2θ + τx y cos 2θ
⎥
2
⎥,
⎦
τx x sin2 θ + τ yy cos2 θ − τx y sin 2θ
(D3)
C
2010 The Authors, GJI, 183, 35–63
C 2010 RAS
Journal compilation Viscoelasticity and lithospheric stresses
63
with prime denoting rotated stresses. The matrix components in (D3) can be spelled out as the following system of equations:
τx x = τx x cos2 θ + τ yy sin2 θ + τx y sin 2θ,
τ y y = τx x sin2 θ + τ yy cos2 θ − τx y sin 2θ,
1
(τ yy − τx x ) sin 2θ + τx y cos 2θ.
2
For small rotation angles θ , the terms in (D4) can be approximated by a Taylor series expansion up to second order and yield
τx y =
(D4)
τx x = τx x + 2τx y θ + O(θ 2 ) ≈ τx x + 2τx y θ,
τ y y = τ yy − 2τx y θ + O(θ 2 ) ≈ τ yy − 2τx y θ,
τx y = τx y + (τ yy − τx x )θ + O(θ 2 ) ≈ τx y + (τ yy − τx x )θ.
(D5)
Given θ = ω t, we see that (D5) is equivalent to the time integrated form of (36) and thus have shown that the Jaumann derivative is
simply a truncated Taylor series expansion; this also implies that a good approximation for the full rotation formula (D4) can only be expected
for small rotation angles. For the stress equilibrium not to be violated, the maximally allowed stress rotation angle per time step has to be
restricted to small values.
C
2010 The Authors, GJI, 183, 35–63
C 2010 RAS
Journal compilation