Strain and competence contrast estimation from fold shape
advertisement

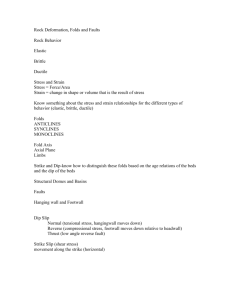
Tectonophysics 340 (2001) 195 – 213 www.elsevier.com/locate/tecto Strain and competence contrast estimation from fold shape Stefan M. Schmalholz *, Yuri Yu. Podladchikov Geologisches Institut, ETH Zentrum, 8092 Zürich, Switzerland Received 14 February 2000; accepted 21 February 2001 Abstract A new method to estimate strain and competence contrast from natural fold shapes is developed and verified by analogue and numerical experiments. Strain is estimated relative to the nucleation amplitude, AN, which is the fold amplitude when the amplification velocities caused by kinematic layer thickening and dynamic folding are identical. AN is defined as the initial amplitude corresponding to zero strain because folding at amplitudes smaller than AN is dominantly by kinematic layer thickening. For amplitudes larger than AN, estimates of strain and competence contrast are contoured in thickness-to-wavelength (H/l) and amplitude-to-wavelength (A/l) space. These quantities can be measured for any observed fold shape. Contour maps are constructed using existing linear theories of folding, a new nonlinear theory of folding and numerical simulations, all for single-layer folding. The method represents a significant improvement to the arc length method. The strain estimation method is applied to folds in viscous (Newtonian), power-law (non-Newtonian) and viscoelastic layers. Also, strain partitioning in fold trains is investigated. Strain partitioning refers to the difference in strain accommodated by individual folds in the fold train and by the whole fold train. Fold trains within layers exhibiting viscous and viscoelastic rheology show different characteristic strain partitioning patterns. Strain partitioning patterns of natural fold trains can be used to assess the rheological behaviour during fold initiation. D 2001 Elsevier Science B.V. All rights reserved. Keywords: Strain estimation; Folding; Fold shape; Competence contrast; Strain partitioning; Fold trains 1. Introduction A major geological question concerning folding is how much strain (or shortening) is associated with observed fold shapes. In this study, strain is defined as the difference between the deformed and the initial length of a line element normalized by its initial length. Information of strain is relevant to palinspastic * Corresponding author. Now at Geomodelling Solutions GmbH, Binzstrasse 18, 8045 Zürich, Switzerland. Fax: +41-1455-6390. E-mail address: stefan.schmalholz@geomodsol.com (S.M. Schmalholz). reconstructions of folded regions such as mountain belts. Although numerous studies have investigated the mechanics of folding using analytical techniques (e.g., Biot, 1961; Johnson and Fletcher, 1994; Hunt et al., 1996), analogue experiments (e.g., Currie et al., 1962; Ramberg, 1963; Hudleston, 1973; Abbassi and Mancktelow, 1992) and numerical simulations (e.g., Dieterich, 1970; Cobbold, 1977; Zhang et al., 1996; Mancktelow, 1999; Schmalholz et al., 2001), there is no satisfactory method to estimate strain from natural fold shapes. One reason is that the existing analytical folding solutions are only valid for small limb dips (10 to 15, e.g., Fletcher and Sherwin, 1978), whereas most natural folds exhibit much larger limb 0040-1951/01/$ - see front matter D 2001 Elsevier Science B.V. All rights reserved. PII: S 0 0 4 0 - 1 9 5 1 ( 0 1 ) 0 0 1 5 1 - 2 196 S.M. Schmalholz, Y.Yu. Podladchikov / Tectonophysics 340 (2001) 195–213 dips. An intuitively attractive estimation method is the so-called arc length method (e.g., Dahlstrom, 1969). This method assumes that the observed fold arc length corresponds to the initial fold wavelength (Fig. 1). Hence, strain can be estimated from the difference between the observed arc length and fold wavelength. However, the arc length method results in large errors if it is applied to folds that developed in settings where the competence contrast between the folded layer and its matrix is small. These errors are a result of the relatively large component of homogeneous layer thickening (Sherwin and Chapple, 1968). This study applies a new analytical solution for folding valid up to large limb dips (Schmalholz and Podladchikov, 2000) and numerical simulations of folding to develop a strain estimation method. This method reliably estimates strain and has the additional advantage that it enables estimation of the competence contrast. The unknown material properties and initial geometry of natural folds are the major obstacles to strain estimation. An essentially flat layer with infinitesimal fold amplitudes may accommodate several hundreds of percent strain by homogeneous layer thickening without developing observable fold limb dips. A layer that appears unfolded in the field may have accommodated substantial layer-parallel strain. With increasing limb dip the strain that is accommodated by layer thickening decreases, and that accommodated by folding increases. In this study, we define a nucleation amplitude, AN (Table 1), as the initial (or reference) amplitude for strain estimation in order to circumvent the obstacle of unknown initial geometry. Only the strain that is accommodated while amplitudes are larger than AN is, therefore, estimated. The strain that is accommodated while amplitudes are smaller than AN is ignored because this strain is not recorded through the fold shape. The variation of fold shape with strain depends on material properties. This was shown by analogue and numerical experiments where the variation of geometrical parameters has been recorded as a function of strain. Manifestations of material dependence are the alteration of the ratios of (i) amplitude to initial amplitude (Chapple, 1968; Hudleston and Stephansson, 1973; Abbassi and Mancktelow, 1992), (ii) arc length to initial arc length (Hudleston, 1973; Johnson and Fletcher, 1994), (iii) amplitude to thickness (Hudleston, 1973), (iv) amplitude to wavelength (Currie et al., 1962) and (v) wavelength to thickness (Lan and Hudleston, 1995a). One specific fold shape, corresponding to different material properties, may theoretically correspond to different strains. Without knowledge of the material properties, a unique strain estimate is not possible from a single geometrical parameter that quantifies the fold shape. To avoid this obstacle, we employ two observable geometrical parameters simultaneously to characterize folds. Thus, during progressive folding, strain is contoured in the thickness-to-wavelength (H/l) and the amplitude-towavelength (A/l) space. These ratios can be measured for any observed fold shape. Strain contours as a function of A/l and H/l provide a ‘‘strain contour map’’, which uniquely defines strain for a continuous range of competence contrasts. The idea of this study is to use two observable geometrical ratios to constrain two unknowns: the competence contrast and the strain that is accommodated by the folds after they exceed the nucleation amplitude. Fig. 1. Major geometrical parameters of folds are the arc length (Larc), wavelength (l), amplitude (A) and thickness (H ). In the initial folding stages, where amplitudes are very small, the arc length has approximately the same length than the wavelength. S.M. Schmalholz, Y.Yu. Podladchikov / Tectonophysics 340 (2001) 195–213 Table 1 List of symbols used in the text a ad add ae ade A A0 AC AN D e en earc ė G H H0 l l0 ldd lde leff Larc Larc0 ml mm n P R Reff vceff Vdyn Vkin general folding growth rate growth rate for ductile layers dominant growth rate for ductile layers growth rate for elastic layers dominant growth rate for elastic layers fold amplitude initial fold amplitude pffiffiffiffiffiffi crossover amplitude: AC ¼ 1=ðp 2aÞ nucleation amplitude: AN = 1/(2a) flexural rigidity of the layer engineering strain: e =(l0 l)/l0 natural strain: en = ln(l0/l) strain that is estimated by the arc length method pure shear background strain rate shear modulus of the layer thickness of the layer initial thickness of the layer fold wavelength initial fold wavelength dominant wavelength for ductile layers dominant wavelength for elastic layers effective dominant wavelength fold arc length initial fold arc length viscosity of the layer viscosity of the matrix power-law exponent of the layer layer-parallel stress dominant wavelength ratio: R = ldd/lde or alternatively R = ade/add effective dominant wavelength ratio: Reff = n max(1,R) effective viscosity contrast dynamic folding velocity kinematic folding velocity The aim of this paper is to provide a practical tool for field geologists, which enables strain and competence contrast estimation from fold shape. We also show all steps of the mathematical derivation of our strain estimation method to present the assumptions and limitations of our method. The study starts from deriving the nucleation amplitude (the reference amplitude for strain estimation). In the next section we derive an amplitude, designated the crossover amplitude, at which the existing theories of folding break down. Both sections, quantifying the initial stages of the folding instability, are potentially useful for strain corrections if the initial fold amplitude is known. In the succeeding section, new analytical 197 relationships for the nonlinear folding stages (Schmalholz and Podladchikov, 2000) are used to choose the geometrical parameters for the strain estimation method and to evaluate its range of applicability. Next, numerical simulations are used to construct the new method of strain and competence contrasts estimates. All results are derived for ductile (viscous and power-law) as well as for viscoelastic layers to avoid a restriction of the strain estimation method to a certain layer rheology. Otherwise, this rheology needs to be known by the geologist for the observed folds, which is unlikely in the majority of the cases. The new method is then verified by numerical and analogue experiments and applied to constrain the strain partitioning in natural and experimental fold trains. 2. The nucleation amplitude for ductile and viscoelastic layers A layer subjected to layer-parallel shortening accommodates strain by both layer thickening and rotation. The deformation process, during which considerable rotation of fold limbs takes place, is termed folding or buckling (e.g., Ramsay and Huber, 1987; Price and Cosgrove, 1990). Layer thickening and folding can occur simultaneously, but it is possible to discriminate between the velocity fields of the two mechanisms (e.g., Biot, 1965; Johnson and Fletcher, 1994). If the layer and the matrix exhibit the same material properties, the amplification velocity of the top layer boundary is controlled exclusively by the kinematic velocity, which arises due to layer thickening (e.g., Biot, 1965; Johnson and Fletcher, 1994): Vkin ¼ e_ H : 2 ð1Þ The kinematic velocity is a linear function of the ˙ pure shear background strain rate e_ and the layer thickness H (Fig. 1, for symbols see Table 1). In pure shear, the vertical ( y) distance of the top layer boundary from the origin of the coordinate system (point of zero velocity) is half of the layer thickness H plus the amplitude A. The contribution of the amplitude to that distance can be neglected to calculate the kinematic velocity, because in the initial stages (i.e., 198 S.M. Schmalholz, Y.Yu. Podladchikov / Tectonophysics 340 (2001) 195–213 very small limb dips) the amplitude is much smaller than the thickness of the layer (Fig. 1). If the material properties of the layer are different than those of the matrix, then the dynamic velocity is non-zero because of the instability of the layer. This component of the velocity is (e.g., Biot, 1965; Johnson and Fletcher, 1994): Vdyn ¼ Aa_e: ð2Þ The dynamic velocity is a linear function of the fold amplitude A, a dimensionless growth rate a and the strain rate. For ductile (viscous and power-law) layers embedded in a viscous matrix the thin-plate theory (e.g., Timoshenko and Woinowsky-Krieger, 1959) provides the dimensionless growth rate (e.g., Fletcher, 1974): ! 1 pH0 2 n l0 mm ad ¼ n= : ð3Þ þ 3 l0 2p H0 ml Here ml, mm, H0, l0 and n are the effective viscosity of the layer, the viscosity of the matrix, the initial layer thickness, the initial wavelength of a sinusoidal perturbation and the power-law exponent of the layer, respectively. The subscript ‘‘d’’ indicates that the growth rate corresponds to a ductile layer. The growth rate has a maximum as a function of wavelength, which is obtained by setting the derivative of Eq. (3) with respect to l0 to zero and solving for l0. This maximum corresponds to the dominant wavelength (Fletcher, 1974; Smith, 1977): ldd ¼ 2pH0 ð6nÞ1=3 ðml =mm Þ1=3 : ð4Þ The second subscript ‘‘d’’ indicates that the wavelength is the dominant one. It is assumed that the dominant wavelength is selected and preserved during the initial stages of folding because perturbations with this wavelength grow exponentially faster than all other perturbations. Substituting Eq. (4) into Eq. (3) gives the dominant growth rate for ductile layers: add ¼ pffiffiffi 2=3 4 n ml : 3 mm ð5Þ In Eq. (5), the growth rate is explicitly dependent on material properties. Alternatively, add can be expressed through ldd and H0 using Eq. (4). This makes the dominant growth rate explicitly dependent on geometric parameters: add n ¼ 2 p ldd H0 2 : ð6Þ In Fig. 2, the kinematic velocity and several dynamic velocities, for different material properties Fig. 2. Growth of kinematic and dynamic velocities during shortening. (A) The dynamic velocities (solid lines) increase with increasing viscosity contrast (vc). The natural strain, en, at which the dynamic velocity equals the kinematic velocity depends on the initial amplitude to thickness ratio (here A0/H0 = 0.02). (B) For smaller A0/H0 ratios (0.01) than in (A), more strain is necessary for the dynamic velocities to exceed the kinematic velocities. The intersection between dynamic and kinematic velocities defines the nucleation amplitude. S.M. Schmalholz, Y.Yu. Podladchikov / Tectonophysics 340 (2001) 195–213 (viscous rheology, n = 1) and initial amplitudes, are plotted versus the natural strain, which is defined by: en ¼ lnðl0 =lÞ; ð7Þ where l is the current fold wavelength. The dynamic velocity grows faster than the kinematic velocity with increasing natural strain, and exceeds the kinematic velocity after a certain amount of natural strain. This amount of natural strain depends on the material properties and the initial amplitude. The amplitude, at which the dynamic velocity is equal to the kinematic velocity, is termed nucleation amplitude AN. AN is derived by equating Eqs. (1) and (2) and solving the result for A/H: AN ¼ A 1 ¼ ; H 2a ð8Þ which is dimensionless (the amplitude is measured in units of the layer thickness). Characterizing the growth rate by the value obtained for the dominant wavelength yields: p2 1 AN ¼ 2 n H0 ldd 2 : ð9Þ For elastic (subscript ‘‘e’’) layers embedded in a viscous matrix, the thin-plate theory provides the dimensionless growth rate (Turcotte and Schubert, 1982): 1 2p ae ¼ 4mm e_ l ! 2 2p D PH0 ; l ð10Þ where D and P are the flexural rigidity of the layer and the layer-parallel membrane stress (averaged over layer thickness), respectively. For incompressible materials, the flexural rigidity is: D¼ 1 GH03 ; 3 ð11Þ where G is the shear modulus of the layer. As in the ductile case, the growth rate function yields a domi- 199 nant wavelength for elastic layers (e.g., Biot, 1961; Turcotte and Schubert, 1982): pffiffiffiffiffiffiffiffiffi ð12Þ lde ¼ 2pH0 G=P: The corresponding dominant growth rate for elastic layers is then: ade ¼ p P H0 : 3 mm e_ lde ð13Þ To obtain ‘‘effective’’ parameters valid for ductile and viscoelastic layers, we now employ linear viscoelastic folding theory (Schmalholz and Podladchikov, 1999, 2001) to express the elastic dominant wavelength and growth rate. To this end, it is assumed that finite amplitude folding occurs in lithospheric regions dominated by ductile behaviour (i.e., Deborah num˙ bers mle_ /G < 1 (e.g., Poliakov et al., 1993; Schmalholz and Podladchikov, 1999)). Consequently, the membrane stress P is expected to become limited by the ˙ viscous membrane stress 4mle_ (e.g., Turcotte and Schubert, 1982) at ˙ very small strain. Therefore, in this study P = 4mle_ is assumed. Folded layers that exhibit growth rates derived for elastic layers are, in this study, viscoelastic because the membrane stress is assumed to be viscous (Schmalholz and Podladchikov, 2000). The dominant wavelength ratio R introduced by Schmalholz and Podladchikov (1999) is defined as: 1=3 1=2 ldd 1 ml P R¼ ¼ ; 6n mm G lde ldd : lde ¼ ð14Þ R The dominant wavelength ratio R relates the dominant growth rates through the proportionality: ade ¼ add R: ð15Þ For layers exhibiting a viscoelastic Maxwell rheology (i.e., elastic and viscous element connected in series), the folding mode (ductile or elastic) that exhibits the largest growth rate will tend to dominate in nature. Therefore, the R parameter is controlling if a compressed viscoelastic (Maxwell model) layer folds ductilely (R < 1) or elastically (R >1) (Schmal- 200 S.M. Schmalholz, Y.Yu. Podladchikov / Tectonophysics 340 (2001) 195–213 holz and Podladchikov, 1999, 2001). Comparison of this criterion with the relationship between the dominant wavelengths (Eq. (14)) shows that the faster mode of folding is characterized by shorter dominant wavelength. Eq. (5) establishes a relation between the viscosity contrast and add. To preserve this relationship in the context of viscoelastic folding, an effective viscosity contrast is defined by the condition that the dominant growth rates are given by expressions identical to Eq. (5). Solving Eq. (5) (n = 1) for the viscosity contrast and substituting add and ade yields then an ‘‘effective’’ viscosity contrast: ( 3=2 pffiffiffi m ) 3 l R<1 4 add ¼ n mm ; pffiffiffiffiffiffiffiffi vceff ¼ 3 3=2 3 3=2 ¼ nR3 mml ; R > 1 4 ade ¼ 4 ðadd RÞ m pffiffiffi m ¼ nðmaxð1; RÞÞ3=2 l : mm (16) In a similar way an effective dominant wavelength can be introduced that preserves the relation between Fig. 3. (A) The alteration of the nucleation amplitude AN versus leff (Eq. (17)). AN is the amplitude at which the kinematic velocity equals the dynamic velocity. AN increases strongly for decreasing leff. (B) The alteration of the crossover amplitude AC versus leff. AC is the amplitude at which the linear theories break down. AC increases strongly for decreasing leff. (C) The continuous folding process can be separated in three stages: (i) kinematic layer thickening (A < AN), (ii) exponential growth of the amplitude (AN < A < AC), and (iii) layer length controlled growth of the amplitude (AC < A). (D) The maximum strain that can be accommodated between AN and AC is 40% for a viscosity contrast of 2. For a viscosity contrast of 100, the maximum strain reduces to 13%. The strain decreases strongly if viscosity contrasts or Reff are increased, where Reff = n max(1,R). S.M. Schmalholz, Y.Yu. Podladchikov / Tectonophysics 340 (2001) 195–213 the dominant wavelength and the growth rate given in Eq. (6). The effective dominant wavelength can be written: ( leff ¼ ldd H0 ldd H0 pffiffiffi n; pffiffiffipffiffiffi n R; R < 1ðductile foldingÞ R > 1ðelastic bucklingÞ ldd pffiffiffipffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi n maxð1; RÞ: H0 ¼ ) (17) The effective dominant wavelength yields a general growth rate valid for ductile and elastic layers: a¼ leff p 2 : ð18Þ This growth rate can be substituted into Eq. (8) to provide a general nucleation amplitude for ductile and viscoelastic layers: AN ¼ 1 1 p 2 ¼ : 2a 2 leff ð19Þ Decreasing values of leff cause larger nucleation amplitudes because the growth rates decrease with decreasing values of leff and this requires larger amplitudes to maintain the same dynamic velocity (Eq. (2), Fig. 3A). The formation of large amplitude folds having large arc length to thickness ratios requires fast initial growth rates, i.e., a >> 1 and leff >>1, which result in small nucleation amplitude values (Eq. (19), Fig. 3A). Therefore, the nucleation amplitude is likely to be smaller than the real initial amplitude for observable folds of practical interest, a conclusion of primary importance for the following discussion. 3. The crossover amplitude for ductile and viscoelastic layers The classical linear theory of folding described above becomes invalid at a certain amplitude, because the assumptions that allow linearization are strictly valid only for infinitesimal amplitudes (or very small limb dips) (e.g., Chapple, 1968; Schmalholz and 201 Podladchikov, 2000). The linear theory cannot provide its own limits and, therefore, a new nonlinear finite amplitude theory (Schmalholz and Podladchikov, 2000) is used to establish the limits of the linear theory. The nonlinear theory estimates the crossover amplitude at which the linear theory breaks down as (cf., Schmalholz and Podladchikov, 2000): AC ¼ A 1 1 1 pffiffiffiffiffiffi ¼ pffiffiffi : l p 2a 2leff ð20Þ The crossover amplitude is a dimensionless number that measures the amplitude in units of the current wavelength. Amplitudes smaller than AC grow exponentially (as predicted by the classical, linear solutions), whereas amplitudes larger than AC grow slower than exponential, being controlled by the layer’s resistance to stretching (Fig. 3B). This growth is designated as layer length controlled growth (Schmalholz and Podladchikov, 2000). To view nucleation (Eq. (19)) and crossover amplitudes on a single plot, AN is multiplied by the initial dominant thickness to wavelength ratio. Thus, AN is also normalized by the wavelength. In Fig. 3C, the nucleation and crossover amplitudes are plotted versus the dominant wavelength to thickness ratio for viscous rheologies. This phase diagram distinguishes three stages of viscous folding, which are kinematic thickening, exponential growth and layer length controlled growth (Fig. 3B). The strain that is accommodated between AN and AC during folding can be calculated using the linear theory. Classical, linear analytical theories assume an exponential growth of the fold amplitude such that (e.g., Biot, 1965; Johnson and Fletcher, 1994): A ¼ A0 expðaen Þ; ð21Þ where A0 is the initial amplitude of the fold. To calculate the strain accommodated between AN and AC, A in Eq. (21) is replaced by AC and A0 is replaced by AN. The strain is then: 1 AC ldd ln a AN H0 2 pffiffiffi 2 2 l p ¼ ln pffiffiffiffiffiffiffi eff : leff Reff p2 en ¼ ð22Þ 202 S.M. Schmalholz, Y.Yu. Podladchikov / Tectonophysics 340 (2001) 195–213 This strain is small for folding parameters of practical interest (Fig. 3D), and from now on we express strain by the so-called engineering strain, e, which is related to the natural strain en (Eq. (7)) by: e¼ l0 l l 1 : ¼1 ¼1 l0 l0 expðen Þ ð23Þ The overall strain accommodated by most natural folds is dominated by the layer length controlled growth stage of folding because the strain accommodated between AN and AC is small (Fig. 3C and D). The linear analytical solutions for fold amplification (e.g., Biot, 1961; Johnson and Fletcher, 1994) are, therefore, unsuitable to derive a strain estimation method and we have to use a new nonlinear solution valid for finite amplitude folding (Schmalholz and Podladchikov, 2000). 4. The strain contour map In this section, a strain contour map is constructed that allows strain and competence contrast estimation from fold shapes without knowledge of material properties and initial geometries. The strains are estimated with respect to the nucleation amplitude AN. Numerical simulations of viscous and viscoelastic single-layer folding were performed to provide a basis for the analytical treatment using a combined spectral/ finite-difference method (Schmalholz et al., 2001) (Fig. 4). These simulations establish known or real strains that can be compared to estimated strains. Applying the arc length method assumes that observed fold arc lengths (Larc, cf. Fig. 1) correspond to initial fold wavelengths. Therefore, the ‘‘arc length strain’’ can be calculated by: earc ¼ Larc l : Larc ð24Þ As expected, the arc length strains estimated for viscous folds that developed in settings where viscosity contrasts are small exhibit the largest deviations from the real strain (Fig. 5). This deviation is caused by the large component of homogeneous layer thickening (Sherwin and Chapple, 1968). Layers with large growth rates (either large viscosity contrast or R>1) Fig. 4. Numerically simulated single-layer fold shapes for three different material properties. The three folds initially exhibited a sinusoidal fold shape corresponding to the theoretical dominant wavelength to thickness ratios. Increasing viscosity contrasts cause larger wavelength to thickness ratios and faster amplitude growth. Numbers above folds indicate engineering strains in percent. S.M. Schmalholz, Y.Yu. Podladchikov / Tectonophysics 340 (2001) 195–213 203 in Eq. (26) is identical to that for the arc length method (Eq. (24)). The finite amplitude solution provides the arc length method in the limit of very large growth rates. Schmalholz and Podladchikov (2000) showed that the arc length of a folded layer with initial sinusoidal shape can be approximated by: Larc p2 ðA=lÞ2 ¼1þ : l 1 þ 3ðA=lÞ2 Fig. 5. Accuracy of the arc length method. The arc length method is applied to numerically simulated fold shapes and strain estimates obtained by the arc length method are compared with real strains known from numerical simulations. The dotted line for ‘‘chevron type’’ folding corresponds to folding with pure limb rotation where the initial arc length is unaltered during folding. The arc length method gets more inaccurate with decreasing viscosity contrast (vc). The arc length method is accurate for viscoelastic layers with R = 2 and different ratios of membrane stress to shear modulus ( P/G = PG) because folds with large growth rates tend to develop ‘‘chevron type’’ fold shapes. show a ‘‘chevron type’’ fold evolution and the arc length method is accurate because for folding of layers with large growth rates, the limbs are rigid and exclusively rotate around the fold hinge (Fig. 5; for a geometrical description see Price and Cosgrove, 1990). The new finite amplitude solution derived by Schmalholz and Podladchikov (2000) is given by: en ¼ ln Larc l0 Larc0 l a=ð2þaÞ þln A l0 A0 l 1=ð2þaÞ ; (25) where Larc0 is the initial arc length of the fold, for which a first order Taylor expansion of Eq. (25) about a 1 gives: en ¼ ln Larc l0 Larc0 l ð26Þ Assuming that l0/Larc0 1, and employing Eq. (23) to relate natural and engineering strains, the strain ð27Þ Substituting Eq. (27) into Eq. (26), replacing the natural strain by the engineering strain (Eq. (23)), assuming that l0/Larc0 1 and solving the resulting equation for A/l yields: pffiffiffi e A pffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi : l p2 ðp2 þ 3Þe ð28Þ Eq. (28) gives the finite amplitude evolution with increasing strain for folded layers exhibiting large growth rates. The amplitude depends on the square root of the strain. Note that this dependence is similar to the relations between the amplitude and the strain (or the axial load) that is known in the engineering literature as post-buckling (e.g., Bazant and Cedolin, 1991), where axially compressed, elastic beams are investigated. After substitution of Eqs. (27) and (6) (for n = 1), the finite amplitude solution for strain (Eq. (25)) depends on two geometric ratios: the amplitude to wavelength ratio A/l and the initial wavelength to thickness ratio ldd/H0. Therefore, the observable ratios A/l and l/H are chosen as coordinates for the construction of a strain contour map. Observed wavelength to thickness ratios are usually < 10 (e.g., Johnson and Fletcher, 1994; Sherwin and Chapple, 1968). Consequently, H/l is employed to represent small wavelength to thickness ratios on linear coordinate axes (Fig. 6). The finite amplitude approximation (Eq. (28)) is valid for small H/l values (which correspond to large ldd/H0 values and large growth rates). Therefore, the strain increase with A/l can be estimated assuming H/l 0 with Eq. (28). However, this approximation (Eq. (28)) must be corrected for increasing H/l (or decreasing ldd/H0). Importantly, results of the finite amplitude solution (Eq. (25)) show 204 S.M. Schmalholz, Y.Yu. Podladchikov / Tectonophysics 340 (2001) 195–213 Fig. 6. The strain contour map. The measured ratios A/l and H/l of any observed fold shape allow strain and competence contrast estimation using the strain contour map. Lines marked with numbers in percent are contour lines of the corresponding strain in percent. that all strain contours exhibit a more or less constant, negative slope of A/l with increasing H/l (Fig. 6). Therefore, A/l in Eq. (28) is replaced by A/l C1H/ l, where C1 is the average slope of a strain contour. The finite amplitude solution is only accurate for viscosity contrasts >50 due to usage of thin-plate assumptions (Schmalholz and Podladchikov, 2000). This is confirmed by numerical results of viscous single-layer folding with small viscosity contrasts. These numerical results indicate a change in strain contour slope, if H/l values are larger than these H/l values, which belong to the folding line for a viscosity contrast of around 50 (Fig. 6). A folding line is the characteristic line containing all points that are defined at different strains through the measured A/l and H/l values for a fixed viscosity contrast (Fig. 6). The initial point of such a line corresponds to the initial dominant wavelength and the nucleation amplitude. Numerical results show that the second slope has an approximately constant value, designated C2, for all strain contours. The folding line for a viscosity contrast of 50 defines the boundary, at which the strain contour slope changes from C1 to C2. The slope C1 is applied for strain contours above the folding line for a viscosity contrast of 50. This folding line was approximated by least squares as: A H 0:22 þ 2:43 l l ð29Þ The regression equation permits calculation of the value of H/l (termed H50), at which the break in slope of a strain contour occurs for a given A/l. The strain contour map (Fig. 6) is then constructed by solving Eq. (28) for strain and correcting A/l by the slopes C1 and C2. This yields: e¼ p2 Z 2 1 þ Z 2 ð3 þ p2 Þ with Z¼ A=l þ C1 H=l; A=l þ C2 H=l þ ðC1 C2 ÞH50 ; if H=l= < H50 : if H=l > H50 H50 ¼ ðA=l þ 0:22Þ=2:43; C1 ¼ 0:8; C2 ¼ 0:4 ð30Þ S.M. Schmalholz, Y.Yu. Podladchikov / Tectonophysics 340 (2001) 195–213 Fig. 7. Verification of the strain estimation method by numerical simulations. Real strains from viscous folds with different viscosity contrast (vc) are plotted versus strains estimated by the strain contour map (Fig. 6). Estimated strains are close to real strains which justifies usage of only two constant slopes to approximate the change of A/l with varying H/l along a fixed strain contour (see Fig. 6). The slope C1 of the strain contours above the folding line for a viscosity contrast of 50 is approximated by least square fit using the finite amplitude solution. Alternatively, C1 can be derived analytically by the derivative of A/l with respect to H/l by applying the rules of implicit differentiation to the finite amplitude solution presented in Eq. (25). The slope C2 of the strain contours below this folding line is approximated by least square fit using three numer- 205 ical simulations for viscosity contrasts of 10, 25 and 50. Numerically calculated folding lines for viscosity contrasts of 10, 25, 50 and 250 are plotted within the strain contour map (Fig. 6). These folding lines permit estimation of the viscosity contrast for viscous folding or, for unknown rheology, the ‘‘effective’’ viscosity contrast. In Fig. 7, the real strain is plotted versus the strain estimated using the strain contour map for several numerical simulations. The accuracy of the strain predictions justifies the usage of the constant slopes C1 and C2, and the usage of the approximated folding line for a viscosity contrast of 50 (Eq. (29)) as the boundary between the two domains of different strain contour slopes. 5. Verification of the strain contour map by numerical and analogue experiments To verify the strain estimation method, two numerical simulations were performed with our spectral/ finite-difference code for folding of layers with initial random perturbations (Schmalholz et al., 2001). The initial amplitude to thickness ratio was 0.02 and the amplitudes exhibited an uncorrelated (‘‘white noise’’) distribution. One layer was pure viscous with a viscosity contrast of 100 and the other layer was viscoelastic (linear viscoelastic Maxwell material; e.g., Turcotte and Schubert, 1982; Findley et al., 1989; Shames and Cozzarelli, 1997) with a viscosity Fig. 8. Numerical simulations of fold train evolution for viscous and viscoelastic rheologies. The initial random perturbations corresponded to an uncorrelated (‘‘white noise’’) amplitude distribution. 206 S.M. Schmalholz, Y.Yu. Podladchikov / Tectonophysics 340 (2001) 195–213 Fig. 9. Verification of the strain estimation method by numerical simulations (Fig. 8). Each fold limb within the fold trains was treated as a fold limb of a fold that is symmetric to the fold axial plane. The measured ratios A/l and H/l were used to estimate strains using the strain contour map. These estimates are compared with real strains of each fold limb, and good coincidence is obtained. contrast of 2500 and R = 2 (Fig. 8). The method is applied to every individual fold limb, which is treated as half of a fold that is symmetric with respect to the fold axial plane. For the purpose of strain estimation, the wavelength is measured as two times the horizontal distance between two neighboring fold hinges. This distance does not correspond to a wavelength in the strict mathematical sense (cf., Fletcher and Sherwin, 1978). However, the good correlation (Fig. 9) between the real strains versus strains estimated by Eq. (30) shows that (i) the use of the horizontal distance between neighboring hinges as wavelength is acceptable and (ii) the strain estimation method is applicable to folds with natural, asymmetric shape. Furthermore, the strain estimation method was applied to results of analogue and numerical experiments performed by other authors. Perturbation C in Fig. 9 of Abbassi and Mancktelow (1992) was considered. The real strain of the fold, which developed in the middle part of the shortened layer, was determined using the experimentally deformed grid. The layer at 2.1% shortening was considered as initial geometry. The shapes of the middle fold at 8.6%, 12.9% and 22.5% bulk strain were used to measure the ratios A/l and H/l. The estimated strains using our method compare well to the real strains determined from the analogue experiment (Fig. 10). A case illustrated by Hudleston (1973) (his Fig. 3B), consists of two folds within a layer (viscosity contrast = 24) that was shortened by a bulk deformation of 6 (around 59%). In this case, the estimated strains are about 10% less than the real strains, a deviation that is attributed to the unknown initial geometry and the small viscosity contrast of the experimental configuration. However, this discrepancy is small in comparison to the error from the arc length method that yields a strain of about 30%. In Lan and Hudleston (1995b), their Fig. 1 was considered, which shows two ductile folds produced by finite element simulations. The two ductile folds exhibited a power-law exponent n = 1 and n = 10, and were shortened 40%. Lan and Hudleston used an initial amplitude to thickness ratio of 0.1 (A0/ H0 = 0.1) for a viscosity contrast of 100. This initial amplitude is larger than the corresponding nucleation amplitude (AN). However, a comparison between real strain and strain estimated by our method is possible, if the real strain is corrected. The strain that would Fig. 10. Verification of the strain estimation method by analogue (Abbassi and Mancktelow, 1992; Hudleston, 1973) and numerical (Lan and Hudleston, 1995a,b; Mancktelow, 1999) experiments of other authors. The solid line represents a perfect fit. Estimated strains correspond well with real strains except for the analogue experiments of Hudleston (1973). The reason is the low viscosity contrast of 24 and the unknown initial geometry. However, the arc length method estimates for this case a strain of around 30%, which is considerably more inaccurate than our strain estimation method. See the text for a more detailed description of the comparison. S.M. Schmalholz, Y.Yu. Podladchikov / Tectonophysics 340 (2001) 195–213 have been accommodated during folding from AN up to A0/H0 = 0.1 is calculated using Eq. (21). AN is determined by Eqs. (4) and (9). The calculations yield that a strain of around 6% for n = 1 and around 4% for n = 10 would have been accommodated between AN and A0/H0 = 0.1. The viscous fold (n = 1) accommodated around 46% strain and the ductile fold (n = 10) around 44% strain, if AN is considered as initial amplitude. The estimated strains are close to the real strains (Fig. 10). Finally, the strain estimation method was applied to finite element simulations of singlelayer folding performed by Mancktelow (1999). The deformed layer in his Fig. 12b at a logarithmic strain of 1.112 (around 67% strain) was considered. For each individual fold, the ratios A/l and H/l were measured, and the estimated strains are again plotted versus the real strain of 67%. 207 The application of the newly developed strain estimation method to analogue and numerically produced fold shapes demonstrates that the method gives reliable strain estimates and can be used to estimate strains from natural fold shapes. 6. Strain partitioning in fold trains In the following the term strain partitioning refers to the difference in strain that is accommodated by the whole fold train (bulk strain) and the individual fold limbs within the fold train (individual strain). To investigate strain partitioning we employ the numerical simulations of fold trains presented in Fig. 8. The bulk strain of the total layer is plotted versus individual strains that are accommodated by individual folds Fig. 11. Strain partitioning in numerically simulated viscous and viscoelastic fold trains. The individual strains of individual folds within the fold train are plotted versus the layer bulk strain. If all individual strains would lie on the dotted line, no strain partitioning is present because all individual folds accommodate the same strain than the fold train. The viscous fold train shows slightly increasing strain partitioning, whereas the viscoelastic fold train shows a strong increase in strain partitioning already at the beginning of shortening. 208 S.M. Schmalholz, Y.Yu. Podladchikov / Tectonophysics 340 (2001) 195–213 Fig. 12. (A) Individual strains of folds within the numerically simulated viscous and viscoelastic fold trains (see Fig. 8) at a bulk strain of 13% are plotted versus the wavelength to thickness ratios (l/H) of the corresponding folds. The viscous fold train shows little strain partitioning and little variation in the l/H ratios. The viscoelastic fold train shows strong strain partitioning where larger l/H ratios correspond to smaller individual strains. (B) The same individual strains are plotted versus the restored initial wavelength to thickness ratios (l0/H0). The l/H ratios were restored using Eq. (33). (Fig. 11). Each fold limb is considered to be the limb of a fold that is symmetric with respect to the fold axial plane. Fig. 11 shows that the strain partitioning in the viscoelastic layer is much stronger than in the pure viscous layer. Individual strains at a layer bulk strain of 13% are plotted versus the corresponding wavelength to thickness ratio (l/H) of individual folds (Fig. 12A). In the viscous case, all folds show more or less the same strain and similar l/H ratios. In contrast, individual folds in the viscoelastic layer accommodate very different amounts of strain and l/H ratios vary strongly. The initial l/H ratio (l0/H0) can be restored if it is assumed that the area of the fold does not change during folding and that the initial arc length is approximately equal to the initial wavelength. The initial fold area Larc0H is then equal to the current fold area LarcH and the equation for the conservation of area (or mass) is: l0 H0 ¼ Larc H: ð31Þ Under pure shear shortening, the initial wavelength is related to the current wavelength through the equation: l0 ¼ lexpðen Þ: ð32Þ Substituting H0 = l0/(l0/H0) into Eq. (31) and rearranging yields: l0 l expð2en Þ : ¼ H0 H Larc =l ð33Þ The ratio of Larc/l can be expressed through the ratio of A/l (see Eq. (27)) and the natural strain can be replaced by the engineering strain using Eq. (23). Therefore, l0/H0 can be calculated through l/H, A/l and the strain. In Fig. 11B, the average restored values of l0/H0 for individual folds in the viscous layer is 14, and comparable to the theoretical dominant wavelength (Eq. (4)) of 16 for a viscosity contrast of 100. The strain estimation method is used to investigate strain partitioning within natural fold trains from Ramsay and Huber (1987) (Fig. 13A) and Weiss (1972) (Fig. 13B). The measured data, the estimated strains and the restored initial wavelength to thickness ratios are presented in Tables 2 and 3. The fold train of Fig. 13A (Table 2) has approximately constant strain of 70% for all individual folds, whereas in the fold train of Fig. 13B (Table 3) strains vary from 35% to 62%. In Fig. 14A, the estimated strains of individual folds within three different fold trains are plotted versus the restored ratio of l0/H0. The three fold S.M. Schmalholz, Y.Yu. Podladchikov / Tectonophysics 340 (2001) 195–213 trains are the train shown in Fig. 13A, the train produced by the numerical simulation of Mancktelow (1999) (the same fold train used for the verification of our method) and the train generated by our numerical simulation for viscous rheology (Fig. 11). All three fold trains show little strain partitioning. In Fig. 14B, the estimated strains of individual folds within two 209 other fold trains are plotted versus the restored ratio of l0/H0. The fold trains are the train shown in Fig. 13B and the train with viscoelastic rheology produced by our numerical simulation presented in Fig. 11. The strain partitioning within these fold trains exhibits the same characteristic relation to the restored ratio of l0/ H0, namely that increasing values of l0/H0 correspond to decreasing strains. 7. Discussion and conclusion Fig. 13. Natural examples of fold trains. (A) Folded layer (thin section, picture from Ramsay and Huber, 1987) where five fold limbs were used to estimate strain (see Table 1). (B) Folded layer (picture from Weiss, 1972) where six fold limbs were used to estimate strain (see Table 2). It this paper, a new method is proposed for the strain and competence contrast estimates as a function of two easily measurable geometrical parameters: the thickness to wavelength (H/l) ratio and the amplitude to wavelength (A/l) ratio (Fig. 6, Eq. (30)). Analytical solutions for folding of ductile and viscoelastic layers are combined using linear viscoelastic folding theory (Schmalholz and Podladchikov, 1999, 2001) to enable the applicability of our method to natural folds without knowing the deformation mechanism. Our method reliably estimates strain from observed fold shapes and is a considerable improvement to the arc length method. The major shortcoming of the method is that the nucleation amplitude AN must be defined as initial amplitude corresponding to zero strain. If the natural (or real) initial amplitude is greater or less than AN, the method over- or underestimates, respectively, the strain. For purpose of comparison, the value of AN for a viscosity contrast of 50 provides a reasonable reference value to define small or large initial amplitude. AN for a viscosity contrast of 50 is 0.03. For viscosity contrasts < 50 thin-plate approximations are inaccurate, because layer thickening influences the deformation of the layer. In general, smaller AN leads to larger growth rates (cf. Eq. (8)). In the initial folding stages large growth rates cause exponential amplitude growth within small amounts of strain. Therefore, if a natural layer is characterized by initial amplitudes >AN, the error in the strain estimate is, in general, small. Also, further improvements of the precision of the strain estimates can easily be made using Eq. (22) to correct for the discrepancy in strain between the real initial amplitude and the nucleation amplitude, if the former can be constrained independently. 210 S.M. Schmalholz, Y.Yu. Podladchikov / Tectonophysics 340 (2001) 195–213 Table 2 Measured data, estimated strains and restored l0/H0 ratios from the fold train in Fig. 13A Table 3 Measured data, estimated strains and restored l0/H0 ratios from the fold train in Fig. 13B Limb A/l H/l e [%] l0/H0 Limb A/l H/l e [%] l0/H0 AB BC CD DE EF 0.70 0.92 0.69 0.61 0.56 0.36 0.26 0.44 0.43 0.51 71 72 72 70 70 11 15 9 10 8 AB BC CD DE EF FG 0.22 0.29 0.19 0.34 0.31 0.25 0.07 0.12 0.09 0.33 0.23 0.30 38 50 35 62 58 55 25 20 21 11 14 11 Measured A/l and H/l ratios that lie below the folding line for a viscosity contrast of 50 indicate small competence contrast (Fig. 6) and that the natural initial amplitudes may have been smaller than AN. Therefore, the strain estimate is a minimum value, and the real strain may be considerably larger than estimated. However, for folding with small competence contrast the arc length method is inaccurate (Fig. 5), and because our method yields more accurate strain estimates than the arc length method the error is unlikely to be important. AN is only likely to underestimate natural initial amplitudes for layers with small competence contrast because the corresponding AN is relatively large. Under this condition, the strain contour map allows estimation of the competence contrast. Also, the strain contour map provides accurate strain estimates for folding of a nonlinear viscous layer exhibiting large power-law exponents (Fig. 10). It appears that the observable differences in fold shape for viscous and strongly power-law rheologies do not reflect significant differences in strain. This behaviour suggests that A/l and H/l are in fact the appropriate coordinates for strain contour maps. Recently performed numerical simulations of single-layer folding showed, that for both simple and pure shear conditions, the evolution of the ratio A/l versus strain is similar. Despite the strong asymmetry of the folds developed under simple shear, the finite amplitude solution (Schmalholz and Podladchikov, 2000), used for constructing the strain contour map, predicted the fold amplification successfully. For the folds developed under simple shear, the amplitude was measured as half the vertical distance between the highest and lowest point of the top layer boundary and Fig. 14. Two characteristic types of strain partitioning. Estimated strains of individual folds within fold trains are plotted versus restored initial wavelength to thickness ratios (l0/H0, see Eq. (33)). (A) The fold trains from Fig. 13A (Ramsay and Huber, 1987), from a numerical simulation of Mancktelow (1999) (see text) and the viscous fold train (Fig. 8) show little strain partitioning and little variation in the restored l0/H0 ratio. (B) The fold trains from Fig. 13B (Weiss, 1972) and the viscoelastic fold train (Fig. 8) show strong strain partitioning and increasing restored l0/ H0 ratios with decreasing individual strain. S.M. Schmalholz, Y.Yu. Podladchikov / Tectonophysics 340 (2001) 195–213 Fig. 15. Growth rates for ductile and elastic layers are plotted versus the wavelength to thickness ratios (l0/H0) of the layers. Growth rates for ductile layers (Eq. (6)) increase with increasing l0/H0 ratios for different power-law exponents (n). Growth rates for elastic layers (Eq. (13)) ˙ decrease with increasing l0/H0 ratios for different values of P/(mle). the wavelength was measured as the horizontal distance between two neighboring, concave upward fold hinges. These new results indicate that the presented strain estimation method can also be successfully applied to asymmetric fold shapes that developed under simple shear conditions. There are two different types of strain partitioning patterns of individual folds within fold trains (Fig. 14): (i) little variation in strain and restored l0/H0 ratio, and (ii) strong variation in strain, where restored values of l0/H0 vary inversely with strain. The two patterns are observed, respectively, in numerically simulated pure viscous and viscoelastic (R = 2) fold trains. We speculate that strain partitioning within fold trains is related to rheology. To justify this speculation, ldd/H0 and lde/ H0 is replaced by l0/H0 within the ductile growth rate (Eq. (6)) and the elastic growth rate (Eq. (13)), respectively. These growth rates have different relationships to l0/H0 (Fig. 15). In the ductile case (n = 1, 5 and 10), increasing l0/H0 ratios cause increasing growth rate. In contrast, in the elastic case ( P/ ˙ mle_ = 50, 250 and 500) increasing l0/H0 ratios cause decreasing growth rate. Therefore, in ductile layers, larger wavelengths grow faster, whereas in elastic layers shorter wavelengths grow faster. In both cases, the fastest growing wavelength should accommodate 211 the most strain. It is assumed that during compression the dominant wavelength is selected and locked when the amplitude of the layer perturbation is approximately equal to AN. Individual fold amplitudes within a layer need not grow to AN simultaneously. In the pure viscous case, the dominant wavelength exclusively depends on the viscosity contrast. This dependence is unchanged regardless of whether the individual folds grow simultaneously. Therefore, the development of the same dominant wavelength is expected, which explains the observed clustering of dominant wavelengths (Figs. 12 and 14A). However, if the layer has a viscoelastic or power-law rheology, the situation may be different. In the viscoelastic cases, as in the viscous case, an individual fold selects its wavelength when its fold amplitude is equal to AN, but the dominant wavelength depends on the layer-parallel stress. The amplification of an individual fold may reduce the layer-parallel stress within an entire viscoelastic layer by increasing the fold arc length (Schmalholz and Podladchikov, 2000). A later fold may then evolve under different stress conditions than the initial fold. For power-law layers, the dominant wavelength depends on the effective viscosity contrast. However, for power-law materials the ‘‘effective’’ viscosity is a function of the stresses within the layer and matrix (m = m(s); Fletcher, 1974). The stresses within the whole fold train may alter due to asynchronous growth of individual folds. The effective viscosity contrast may therefore change during shortening of power-law layers. Consequently, individual folds that have different amplitudes may select wavelengths of different size. Also, strong wavelength selectivity, predicted by the linear theories (e.g., Biot, 1961), decreases strongly after only a few percent of strain for layers with relatively large growth rates (i.e., >75) (Schmalholz and Podladchikov, 2000). This means that the development of a single dominant wavelength within layers exhibiting large growth rates is improbable. In such layers wavelengths of different size may develop. These wavelengths can be shorter or longer than the dominant wavelength, and are expected to amplify according to the finite amplitude growth rate spectra (Schmalholz and Podladchikov, 2000). Consequently, we speculate that periodic folds with approximately the theoretical dominant wavelength only develop when growth rates are small ( < 75). Folds that grow 212 S.M. Schmalholz, Y.Yu. Podladchikov / Tectonophysics 340 (2001) 195–213 rapidly are expected to exhibit heterogeneous wavelength spectra. The typical patterns of strain partitioning between individual folds in fold trains can thus be used to discriminate deformation mechanisms: (i) folding with small growth rates (relatively constant wavelengths), (ii) folding with large growth rates due to viscoelastic rheology (shorter wavelengths accommodate more strain), and (iii) folding with large growth rates due to power-law rheology (longer wavelengths accommodate more strain). Therefore, measured strain partitioning patterns of natural fold trains and our strain estimation method could be used to assess the deformation mode (ductile or viscoelastic) and the magnitude of the competence contrast during the initiation of folding. Acknowledgements We thank R.C. Fletcher, R.H. Groshong, Jr. and H. Fossen for helpful reviews. We are grateful to D.W. Schmid for providing his results of numerical simulations of single-layer folding under simple shear. S.M. Schmalholz was supported by ETH project No. 0-20499-98. References Abbassi, M.R., Mancktelow, N.S., 1992. Single layer buckle folding in non-linear materials: I. Experimental study of fold development from an isolated initial perturbation. J. Struct. Geol. 14 (1), 85 – 104. Bazant, Z.P., Cedolin, L., 1991. Stability of structures: elastic, inelastic, fracture, and damage theories. The Oxford Engineering Science Series. Oxford Univ. Press, New York. Biot, M.A., 1961. Theory of folding of stratified viscoelastic media and its implications in tectonics and orogenesis. Geol. Soc. Am. Bull. 72, 1595 – 1620. Biot, M.A., 1965. Mechanics of Incremental Deformations. Wiley, New York. Chapple, W.M., 1968. A mathematical theory of finite-amplitude rock-folding. Geol. Soc. Am. Bull. 79, 47 – 68. Cobbold, P.R., 1977. Finite-element analysis of fold propagation: a problematic application? Tectonophysics 38, 339 – 358. Currie, I.B., Patnode, H.W., Trump, R.P., 1962. Development of folds in sedimentary strata. Geol. Soc. Am. Bull. 73, 655 – 674. Dahlstrom, C.D.A., 1969. Balanced cross sections. Can. J. Earth Sci. 6, 743 – 757. Dieterich, J.H., 1970. Computer experiments on mechanics of finite amplitude folds. Can. J. Earth Sci. (7), 467 – 476. Findley, W.N., Lai, J.S., Onaran, K., 1989. Creep and Relaxation of Nonlinear Viscoelastic Materials. Dover Publications, New York. Fletcher, R.C., 1974. Wavelength selection in the folding of a single layer with power-law rheology. Am. J. Sci. 274 (11), 1029 – 1043. Fletcher, R.C., Sherwin, J., 1978. Arc lengths of single layer folds: a discussion of the comparison between theory and observation. Am. J. Sci. 278, 1085 – 1098. Hudleston, P.J., 1973. An analysis of ‘‘single-layer’’ folds developed experimentally in viscous media. Tectonophysics 16, 189 – 214. Hudleston, P.J., Stephansson, O., 1973. Layer shortening and foldshape development in the buckling of single layers. Tectonophysics 17, 299 – 321. Hunt, G., Mühlhaus, H., Hobbs, B., Ord, A., 1996. Localized folding of viscoelastic layers. Geol. Rundsch. 85, 58 – 64. Johnson, A.M., Fletcher, R.C., 1994. Folding of Viscous Layers. Columbia Univ. Press, New York. Lan, L., Hudleston, P.J., 1995a. The effects of rheology on the strain distribution in single layer buckle folds. J. Struct. Geol. 17 (5), 727 – 738. Lan, L., Hudleston, P.J., 1995b. A method of estimating the stress exponent in the flow law for rocks using fold shape. PAGEOPH 145 (3/4), 621 – 635. Mancktelow, N.S., 1999. Finite-element modelling of single-layer folding in elasto-viscous materials: the effect of initial perturbation geometry. J. Struct. Geol. 21 (2), 161 – 177. Poliakov, A., Cundall, P., Podladchikov, Y., Laykhovsky, V., 1993. An explicit inertial method for the simulation of visco-elastic flow: an evaluation of elastic effects on diapiric flow in twoand three-layers models. In: Runcorn, D.B.S.a.S.K. (Ed.), Flow and Creep in the Solar System: Observations, Modeling and Theory, Proceedings of NATO Advanced Study Institute, Kluwer, The Netherlands, pp. 175 – 195. Price, N.J., Cosgrove, J.W., 1990. Analysis of Geological Structures. Cambridge Univ. Press, Cambridge. Ramberg, H., 1963. Fluid dynamics of viscous buckling applicable to folding of layered rocks. Bull. Am. Assoc. Pet. Geol. 47 (3), 484 – 505. Ramsay, J.G., Huber, M.I., 1987. The techniques of modern structural geology. Folds and Fractures, vol. 2. Academic Press, London, pp. 309 – 700. Schmalholz, S.M., Podladchikov, Y.Y., 1999. Buckling versus folding: importance of viscoelasticity. Geophys. Res. Lett. 26 (17), 2641 – 2644. Schmalholz, S.M., Podladchikov, Y.Y., 2000. Finite amplitude folding: transition from exponential to layer length controlled growth. Earth Planet. Sci. Lett. 181 (4), 619 – 633. Schmalholz, S.M., Podladchikov, Y.Y., 2001. Viscoelastic folding: Maxwell versus Kelvin rheology. Geophys. Res. Lett. 28 (9), 1835 – 1838. Schmalholz, S.M., Podladchikov, Y.Y., Schmid, D.W., 2001. A spectral/finite-difference method for simulating large deformations of heterogeneous, viscoelastic materials. Geophys. J. Int. 145, 199 – 208. Shames, I.H., Cozzarelli, F.A., 1997. Elastic and Inelastic Stress Analysis. Taylor & Francis, Washington, DC. Sherwin, J., Chapple, W.M., 1968. Wavelengths of single layer S.M. Schmalholz, Y.Yu. Podladchikov / Tectonophysics 340 (2001) 195–213 folds: a comparison between theory and observation. Am. J. Sci. 266, 167 – 179. Smith, R.B., 1977. Formation of folds, boudinage, and mullions in non-Newtonian materials. Geol. Soc. Am. Bull. 88 (2), 312 – 320. Timoshenko, S.P., Woinowsky-Krieger, S., 1959. Theory of Plates and Shells. McGraw-Hill, Auckland. 213 Turcotte, D.L., Schubert, G., 1982. Geodynamics. Applications of Continuum Physics to Geological Problems. Wiley, New York. Weiss, L.E., 1972. The Minor Structures of Deformed Rocks. Springer-Verlag, Berlin. Zhang, Y., Hobbs, B.E., Ord, A., 1996. Computer simulation of single-layer buckling. J. Struct. Geol. 18 (5), 643 – 655.