THEORETICAL TESTING OF A MULTIPLE-SENSOR BRIDGE WEIGH-IN- MOTION ALGORITHM

7th International Svmposium on Heavv Vehicle Weights & Dimensions
Delft. The Netherlands. June 16 - 20.2002
THEORETICAL TESTING OF A MULTIPLE-SENSOR BRIDGE WEIGH-IN-
MOTION ALGORITHM
Arturo Gonzalez Department of Civil Engineering, University College Dublin, Earslfort Terrace, Dublin 2,
Ireland
Mark F. Green Department of Civil Engineering, Queen's University at Kingston, Ontario, Canada K7L 3N6
Eugene 1. O'Brien Department of Civil Engineering , University College Dublin, Earslfort Terrace, Dublin 2,
Ireland)
Haiyin Xie Department of Civil Engineering , Queen's University at Kingston, Ontario, Canada K7L 3N6
ABSTRACT
A Bridge Weigh-In-Motion (B-WIM) system is based on the measurement oftheflexure in a bridge and the use of measurements to estimate the attributes of passing traffic loads. The information provided by strain sensors and axle detectors is converted into axle weights through the application of an algorithm. Because the dynamic interaction between bridge and vehicle has many parameters for which estimation is very difficult from raw bridge strains, the traditional B- WIM algorithm consists of static equations of equilibrium . Hence, dynamics can be a significant source of inaccuracy in B- WIM systems depending on the bridge and vehicle characteristics. In this papel~ the influence of dynamics on BWIM accuracy is assessed numerically by simulating the passage of a number of vehicles over a bridge. Then, the theoretical bridge response is used to test a new B- WIM algorithm based on multiple longitudinal sensor locations and the traditional algorithm based on one single location. In smooth road conditions, the multiple sensor BWIM achieved better results, while the traditional B- WIM failed to predict individual axle weights accurately. In rough conditions, results were much poorer due to high dynamic excitation and only gross vehicle weight was predicted accurately.
Keywords: accuracy, bridge, vehicle, dynamics, WIM.
INTRODUCTION
In the 1970' s in the USA, the Federal Highway Administration (FHW A) started studying Bridge WIM systems to acquire WIM data. Moses (1979) introduced an algorithm based on the assumption that a moving load will cause a bridge to bend in proportion to the product of the load magnitude and a reference curve representative of the bridge behaviour, the influence line. In the 1980's, Peters (1984) developed AXWAY in Australia. This B -WIM system is based on the same concept of influence line. A few years later, he derived a more effective system for weighing trucks using culverts, known as CUL WAY (Peters 1986). Both the American and Australian systems have been used for commercial applications on bridges and culverts. Bridge Weighing Systems Inc. developed one of the first commercial B-WIM systems in 1989 on the basis of Moses' algorithm (Snyder 1992). In the 1990's, three new independent B-WIM systems were developed in Ireland, Slovenia and Japan (O'Connor 1994, Znidaric &
Baumgartner 1998, Ojio et al. 2000). All of these B-WIM systems use algorithms based on static equations of equilibrium combined with measurements at one single longitudinal section.
Because the data being recorded is the sum of static and dynamic components, the dynamic component is generally ignored. However, bridge and truck dynamics have been proven to be one of the sources of inaccuracy of static algorithms. Traditional averaging or filtering techniques are not suitable for the removal of dynamics in every case.
The data input is particularly difficult to analyse from the dynamic response of bridges due to the wide range of trucks on bridges with different classifications and with different dynamic properties. In this paper, theoretical simulations are used to evaluate the influence of suspension type and road profile on the accuracy of a B-WIM algorithm. Additionally, the static equations of the traditional algorithm are extended to multiple longitudinal sensor locations along the bridge. Both one-sensor and multiple-sensor based algorithms are tested in a highly dynamic scenario with the first natural frequency of the bridge close to truck body frequencies.
109
MULTIPLE SENSOR BRIDGE WEIGH IN MOTION (MS-BWIM) ALGORITHM
Kealy & O'Brien (1998) first attempted to develop a weigh in motion system capable of giving a history of axle weights at each point in time as a truck crosses a bridge at normal highway speed by using multiple strain gauge sensor locations. However, simultaneous equations resulted dependent in some cases and a solution was only feasible for reduced number of axles on the bridge (equal to the number of independent equations at that instant). It has been found that combining more sensors with a least squares fitting technique allows determination of a higher number of axles and makes the algorithm applicable to bridges with longer spans. This instantaneous calculation along the length of the bridge requires many sensors; well in excess of the number of axles. Thus, if there are a number of sensors, rn, equal to or greater than the number of axles n, it is possible to minimise the error function defined in Equation 1 at each instant t: k =m f =i)C k -£ ,J" k ; 1
(1) where c k is the theoretical total strain due to the applied load at location k and E k is the measured strain due to the applied load at sensor location k.
By assuming linearity and applying the principle of superposition, it is possible to express the strain at each sensor as:
(2) where:
Ci) : value of influence line of strain at sensor location i due to moving load located atj
Wj : applied load at location j, n : total number of axles on the bridge.
By combining Equations 1 and 2 at each instant t: k =m f
=
~)CklWI
+c k2W2 +",+cknW n
-£k)2 k = l
Differentiating Equation 3 with respect to the axle weight, W i and setting it equal to zero gives:
(3)
(4)
The full set of equations can be expressed in matrix form as: k = m
LCklCkl k = l k = m
L k = l
C klC k2 k=m
L Ck 2C kl k=1 k=1Il
L k=l
C k2C k2 k = m
LCklCkn k = l k =m
L k=1
C k2C kll k = 1Il k = 1Il
LCknCkl k = 1 k = m k = 1I1
L CknC k 2 k = l
(:'l~ k =1II
L£kCkl k =l k = 1Il
L £ k C k2 k =l
L£kCkn k =l
LCkllCkll k = l
Finally, applied loads (weights) can be calculated from Equation 6:
(5)
(6)
If the number of strain sensor locations is high enough, Equation 6 provides a solution along most of the bridge.
The static value can be obtained from the root mean square of the calculated instantaneous axle forces.
110
THEORETICAL SIMULATIONS
The bridge and truck are modelled separately and combined in an iterative procedure. The prediction of bridge response involves convolution of the vehicle loads with modal responses of the bridge and the convolution integral is solved by transformation to the frequency domain using the fast Fourier transform. The method is then extended by an iterative procedure to include dynamic interaction between the bridge and an arbitrary mathematical model of a vehicle. Green & Cebon (1994) illustrate the effectiveness of this calculation method, the convergence of the iterative procedure, and the good agreement with experimental data.
The Bridge Weigh In Motion (B-WIM) system is calibrated with a two-axle fully laden linear sprung vehicle (four degrees of freedom). Then, the system is evaluated with a four-axle vehicle and two different suspension systems
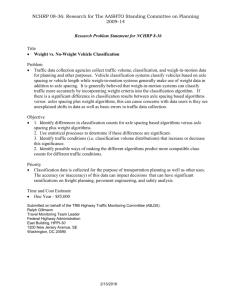
(air and steelleaO. The bridge is modelled as a beam 30 m long. Strain output is calculated every 0.01 s (100 Hz) at 5, 10, 15,20 and 25 m from the bridge support. Figure l(a) shows the records in free vibration after the vehicle has left the bridge and Figure 1(b) the corresponding spectra for the three runs of the two-axle calibration vehicle.
From these Figures, 0 .
97% damping and a 3.33 Hz first natural frequency are obtained.
The vehicle models developed by Green et al. (1995) are a steel sprung four-axle articulated vehicle validated experimentally, and a similar vehicle fitted with air suspensions and hydraulic dampers. The dynamic response of the 30 m beam model is obtained for crossings of each of these two vehicles. The four-axle articulated vehicle has
11 degrees of freedom as shown in Figure 2 . In this Figure, elements A, Band C represent a spring with adiabatic behaviour, Coulomb friction, and a linear spring/damper, respectively. For the vehicle with air suspension, models of air springs with parallel viscous dampers replace the steel-spring elements on the drive axle and the two trailer axles. The suspension on the steer axle is the same for both vehicle models. Two surface profiles, three different speeds (55, 70 and 85 km/h), and three different loading conditions are chosen for the simulations.
Figures 3 and 4 represent the applied dynamic forces over same length of smooth and rough road profile respectively. It can be seen how these forces increase with speed and road roughness. Steel suspensions are clearly more sensitive to these changes, except for a singularity localised at about 90 m. This singularity is due to a bump in the road that excites the wheel hop mode of the vehicle . A steel suspension is better damped at high excitation amplitudes than an air suspension. However, for low excitation the friction in the steel-springs is not overcome and damping is only provided by the tires. Under such circumstances any viscous shock absorber can provide higher damping than the friction in the steel springs The load sharing between axles within the tandem of the air-sprung vehicle is less than in the steel-sprung vehicle. The amplitude of the applied dynamic wheels is higher for worse road conditions as shown in Figure 4. Thus, bridge response will increase with road roughness. Also, body bounce modes of vehicle vibration are excited by longer wavelength variations in road profile whereas axle hop are excited by short wavelength defects such as pot holes, road debris, a rough repair or a mis-aligned joint in a bridge, more likely to occur in a road in poor conditions.
The strain response at the bridge midspan for the fully laden four-axle vehicle on a smooth profile is represented in
Figure 5. As expected, the steel suspended vehicle causes higher dynamic oscillations on strain than the airsuspended vehicle. Figure 6 shows the bridge response at midspan for the fully laden vehicle on a rough profile.
The maximum dynamic response takes place at 70 km/h for the steel-sprung vehicle and 85 kmlh for the air-sprung vehicle. It can be seen that the air-suspended vehicle causes significantly lower dynamic bridge response than the steel spring suspended vehicle and it is less sensitive to a change in speed. In comparison to the smooth profile, the dynamic response due to the steel-sprung vehicle increases by over 100%. These high dynamics suggest the occurrence of frequency matching between the steel sprung vehicle and the bridge. Consequently, Bridge WIM will tend to be less accurate in the cases of st e el spring suspensions, rough road profile, and, for this bridge, for vehicle speeds near 70 km/h . Xie (1999) investigates the maximum interaction of bridges with natural frequencies close to air-sprung vehicles and vehicle axle-hop vibrations.
CALIBRATION
The traditional static and multiple-sensor B-WIM algorithms are calibrated with longitudinal bending at midspan and bending at five points equally spaced along the bridge respectively. Accuracy classes are determined according
111
to the COST323 European Specification on WIM (1999). Thus, the calibration takes place in full repeatability conditions (rl): A two-axle vehicle passing at different speeds, one load and one lateral position on the road. Then, the following section evaluates the system in limited reproducibility conditions (RI): two 4-axle vehicles passing over the bridge at different speeds with different loads. Results are given for two different road profiles.
Concerning calibration, the shape of the theoretical influence line is known from beam theory and the static algorithm only requires a calibration factor to adjust the magnitude of the strains to the theoretical model. If the exact influence line for bending moment is used, the calibration factor is the product of the modulus of elasticity and the section modulus. Several approaches are available for obtaining the real shape of the influence line from an experimental record (Gonzruez 2001). For this analysis, the calibration factor is obtained by dividing the real static gross vehicle weight by the predicted weight of the calibration truck. A linear sprung two axle vehicle with 4 m axle spacing, 32.42 kN static weight in the front axle and 59.94 kN in the rear axle is used for calibration.
Smooth Road Profile
At one particular location i, bending moment, M i, is proportional to strain, £;, through the elasticity, E, and section modulus, Si' as shown in Equation 7.
(7)
Bending moment depends on the shape of the influence line, bridge length, static axle weights, axle spacings and position of the calibration vehicle. The results of the static calibration are shown in Figure 7. The calibration factor changes for each speed very slightly (2.IlxI0
1o at 55 kmlh, 2.10 xl0
10 at 70 kmlh and 2.08 xl0
10 at 85 km/h). An average value of2.1O xlO
IO is adopted.
Other sensor locations used for MS-BWIM are calibrated in the same way. The axle forces predicted by MS-
BWIM are compared to the simulated applied forces in Figures 8(a) and (b). A clear correspondence between predicted and simulated instantaneous wheel forces is not evident, but the average value is very similar in both cases. Dynamic wheel forces are strongly excited by a bump located at about 5 m from the bridge end. Values tend towards infinity at both ends of the instantaneous calculation (very small value of the determinant in Equation 6) and they are not taken into account in the determination of the static weight.
Figure 9 illustrates the results in static weights for the calibration vehicle. The front axle is the lightest and the percentage error tends to be higher than in the rear axle as shown in Figures 9(b) and (c). MS-BWIM is slightly worse than B-WIM for predicting gross vehicle weight, but the improvement in individual axle weights is very significant.
Rough Road Profile
The calibration of the static algorithm is shown in Figure 10. The scale factor between real and predicted gross weight is 2.12xI0
1o at 55 kmIh, 2. 12xlO lO at 70 kmIh and 2.08xlO
10 at 85 kmlh. An average value of 2.09x10
10 is adopted as the calibration factor.
Figure 11 shows the instantaneous axle forces from the simulation run at 55 kmIh and the corresponding prediction by MS-BWIM. As in the smooth road profile, the forces increase enormously at about 5 m from the bridge end and the instantaneous solution from here to the end of the record is ignored. There is a large increase in oscillations over the smooth case. Figure 12 shows the variation of axle forces at 70 kmlh. The prediction of the static answer proves more difficult at higher speeds, especially in the case of a rough profile. Figure 13 shows the calculation at
85 kmlh. The front axle is overweighed . MS-BWIM is not able to distinguish which is the force applied by each axle due to the strong dynamics and the limitation in the number of sensors. Thus, Figures 13(a) and (b) show how the prediction of the front axle follows a pattern similar to the simulated rear axle.
The errors in individual axle weights for the test vehicle are given in Figure 14. Calibration results are much poorer than in the case of a smooth profile (Figure 9). Results in individual axle weights at 85 kmlh are very inaccurate, but static B-WIM can predict gross weight with less than 2% error.
112
CHECK OF ACCURACY
A four-axle vehicle (axle spacings 3.49, 6.76 and 2 m) is chosen for assessment of the calibration carried out in the previous section (influence line and calibration factors obtained with the two-axle calibration vehicle do not suffer any further manipulation). The static weights of this vehicle were unknown to the first author prior to the calculations. Two types of suspensions are investigated: air and steel leaf sprung. These two vehicles are driven at three different speeds (55, 70 and 85 km/h) and three loading conditions (unloaded, half and fully laden).
Smooth Road Profile
Figure 15 shows the approximation by the static B-WIM algorithm to the response caused by a fully laden 4-axle truck at 70 km/h. The results illustrated in Figure 15 are based on the concept of an influence line. The contribution of each axle separately and all axles to the expected static strain are represented. The strain record caused by a steel leaf suspension exhibits a higher deviation from the fitted response than air suspension. Hence, predictions of individual axle weights are expected to be more accurate for air suspensions.
Figure 16 shows the simulated load history and the prediction by MS-BWlM for the case of a fully laden 4-axle truck with air suspension travelling at 70 km/h. Figures 16(c) and (d) show that the third and fourth axles allow for an instantaneous solution only when the first axle is located between 17 and 25 m from the bridge start (as result of the number of truck axles, their spacings and the number of sensors, their locations and influence lines). Figure 17 shows the results of MS BWIM when using the same truck and speed as Figure 16, but with a steel suspension.
From Figures 16(c), 9.16(d), 9.l7(c) and 9.l7(d), the prediction of the third and fourth axles can be seen to be more difficult for the leaf sprung than for the air sprung vehicle.
Tables 1 and 2 give accuracy classes according to the COST323 WIM European Specification (1999) for each criterion and algorithm. MS BWIM is very accurate for all single criteria, even axles of a group in class B(lO). The static B-WIM algorithm can predict gross weight accurately (A(5)), but fails to predict single axles (E(45)). All results are represented in Figure 18.
Rough Road Profile
Results for a rough road profile are very poor and only gross weight give sensible levels of accuracy. The poor accuracy of a B-WIM algorithm on a rough profile can be explained by Figure 19. Figure 19 represents the approximation by the static algorithm to the total strain generated by a fully laden truck at 70 km/h. The total response is far from this static response due to the high dynamic oscillations. The static algorithm is very inaccurate and their approximations (by minimising difference between total response and expected static response) can lead to negative values for individual axle weights: For instance, the second and fourth axles in
Figures 19(a) and (b) (thin line representing bending moment diagram due to a single axle is over the x-axis). As in the case of a smooth profile, steel leaf suspensions give worse results than air suspensions.
If the road is in a poor condition, algorithms based on linearity and superposition do not appear to offer a valid solution. MS-BWIM is also extremely inaccurate because it minimises the instantaneous solution by using influence lines at many locations. Figure 20 shows the results for the same run as Figure 19(a). The static value can be estimated from instantaneous values when the first axle is located between 18 and 25 m from the bridge start.
However, the third axle and fourth axles are strongly overweighed and underweighed respectively (Figures 20(c) and (d)).
According to Tables 3 and 4, gross weight is the only criterion which gives reasonable levels of accuracy. The static B-WIM gives the best result - C(l5) for gross weight (Table 3). The poor results in individual axles are due to the failure of the static algorithm to estimate the static component caused by each axle from the total bending response (illustrated in Figure 19). Figure 21 illustrates the estimation of every identity in the sample. However, if the test took place in extended repeatability conditions (r2) taking into account only the runs of the air suspension truck, the accuracy class for gross weight would be raised to A(5) and C(15) for the static B-WIM and MS-WIM algorithms respectively.
113
CONCLUSIONS
A B-WIM system has been theoretically tested in very adverse dynamic circumstances. A two-axle linear sprung vehicle model has been used for calibration and accuracy has been assessed with a four-axle non-linear sprung vehicle 01 degrees of freedom). Air and steel suspensions on both smooth and rough pavements were considered.
In smooth road conditions, MS-BWIM achieved the most accurate overall class BOO) (corresponding to the criterion of axle weights within an axle group, but B+(7) for the criterion of individual axle weights). The traditional static B WIM had the same accuracy class, A(5), for gross vehicle weight as MS BWIM, but it failed to predict individual axle weights accurately (E(45)). The 30 m span length made it difficult to identify individual axles from strain at only one location, and MS-BWIM derived a more accurate value from the load history.
B-WIM accuracy decreased for steel suspensions because bridge dynamic response was more important than for air suspensions. The poorest results were obtained with steel suspensions on rough profiles . Bridge strains oscillated with higher amplitudes when crossed by the steel suspension truck due to the proximity of the frequencies of the truck and the bridge, which resulted in huge errors in any B WIM algorithm . In these conditions, the estimation of individual axle weights is very inaccurate (class E ), but the traditional static B-WIM algorithm can still provide reasonable values for gross vehicle weight (COS)). In order to deal with high dynamic bridge excitation, the use of dynamic models and the solution of the dynamic inverse problem in B WIM practice need to be analysed in the near future . In the interim, bridges selected as B-WIM sites should have natural frequencies that do not coincide with the dominant natural frequencies of heavy vehicles.
• COST323 (999), E uropean Specification on Weigh-In-Motion of Road Vehicles, version 3,
EUCO _ COST/323/8/99, LCPC, Paris, August, 66 pp .
• Gonzalez, A. (2001), 'Development of Accurate Methods of Weighing Trucks in Motion', Ph.D. Thesis,
Department of Civil E ngineering, Trinity College Dublin, Ireland.
• Green, M.F. & Cebon, D . (994), 'Dynamic Response of Highway Bridges to Heavy Vehicle Loads: Theory and Experimental Validation', Journal of Structural Engineering, ASC E , Vol. 121, No. 2, February, pp . 272 -
282.
• Green, M .
F., Cebon, D . & Cole, DJ . (1995), 'Effects of Vehicle Suspension Design on Dynamics of
Highway Bridges', Journal of Structural Engineering, ASCE, Vol. 121, No. 2, February, pp. 272 282,
(995).
• Xie, H. (999), 'The Effects of Surface Roughness and Vehicle Suspension Type on Highway Bridge dynamics' , M .
Sc. Thesis, Department of Civil Engineering, Queen's University at Kingston, Ontario, Canada.
• Kealy, N.I. & O'Brien, E l. (998), 'The Development of a Multi-sensor Bridge Weigh-In-Motion System',
5th International Symposium on Heavy Vehicle Weights and Dimensions, Maroochydore, Australia,
March/April, pp . 222-235.
• Moses, F. (1979), 'Weigh-in-motion System using Instrumented Bridges', Transportation Engineering Journal of ASCE, Proceedings of the American Society of Civil Engineers, Vol. 105, No . TE3, May, pp. 233-249.
• O'Connor, J.M. (1994), 'The Development of a Weigh In Motion System in Ireland', M.Sc. Thesis, Trinity
College Dublin, Ireland.
• Ojio, R., Yamada, K. & Shinkai, H. (2000), 'BWIM Systems using Truss Bridges', Bridge Management
Four, Edited by M.J. Ryall, G.A.R. Parker and J.E. Harding, Thomas Telford, University of Surrey, UK, pp.
378-386.
• Peters, RJ . (1984), 'AXWAY - A System to Obtain Vehicle Axle Weights', in Proceedings 12th ARRB
Conference, 12(1), pp . 17-29.
• Peters, R.J. (1986), 'An Unmanned and Undetectable Highway Speed Vehicle Weighing System', in
Proceedings 13 th
ARRB Conference, 13(6), pp. 70-83.
• Snyder, R.E. (992), 'Field Trials of Low-Cost Bridge WIM', in Publication FHWA-SA-92 014, Washington
DC.
• Znidaric, A. & Baumgfutner, W. (1998), 'Bridge Weigh In-Motion Systems An Overview', in Preproceedings of the 2 nd European Conference on Weigh-In-Motion, eds. E.J. O'Brien & B. lacob, Lisbon,
Portugal, pp. 263-272.
114
Table 1- Accuracy classification for static BWIM algorithm (smooth profile) (R 1) (n : Total number of vehicles; m: mean; s : Standard deviation; no: level of confidence; B: tolerance of the retained accuracy class; Bmin: minimum width of the confidence interval for no; n: Level of confidence of the interval [-B,B] )
Criterion
Single axle
Group of axles
Gross Weight
Relative error statistics n m
(%) s
(%)
36
18
18
-0.31
-2.34
-0.79
21.36
7.71
0.93 no
(%)
93.1
90.3
90.3
Accuracy calculation
Class B
(%)
Bmin
(%)
E (45) 54
C(15) 18
A(5) 5
47.3
17.9
2.5
1t
(%)
96.5
90.5
100.
Class
Retained
E(45)
Table 2- Accuracy classification for static MS-BWIM algorithm (smooth profile) (RI) (n: Total number of vehicles; m: mean; s: Standard deviation; no: level of confidence; B: tolerance of the retained accuracy class; Bmin: minimum width of the confidence interval for no; n: Level of confidence of the interval [-B,B] )
Criterion
Single axle
Axle of group
Group of axles
Gross Weight
36
18
18
Relative error statistics n m
(%) s
(%)
36 -0.89 3 .
74
-0.32
-0.07
-0.56
8
2
.
.
31
70
1.46 no
(%)
93.1
93.1
90.3
90 .
3
Accuracy calculation
Class
B+(7) 11
B(10) 20
A(5)
A(5)
B
(%)
7.14
5
Bmin
(%)
8.5
18.4
6.1
3.4
1t
(%)
98.3
95.4
95.3
98 .
8
Class
Retained
BOO)
Table 3- Accuracy classification for static B-WIM algorithm (rough profile) (RI) (n: Total number of vehicles; m: mean; s: Standard deviation; no: level of confidence; B: tolerance of the retained accuracy class; Bmin: minimum width of the confidence interval for no; n: Level of confidence of the interval [-B,B] )
Criterion
Single axle
Group of axles
Gross Weight
Relative error statistics n
36
18
18 m
(%)
0.95 s
(%) no
(%)
-9.46 135.4 93.1
15.60 42.52 90.3
5.71 90.3
Accuracy calculation
Class B
(%)
E(300) 360
E(100 ) 110
C(5) 15
Bmin
(%)
1t
(%)
300.4 97.3
100.1 93.6
13.0 94.9
Class
Retained
E(300)
Table 4- Accuracy classification for static MS-BWIM algorithm (rough profile) (RI) (n: Total number of vehicles; m: mean; s: Standard deviation; no: level of confidence; B: tolerance of the retained accuracy class; Bmin: minimum width of the confidence interval for no; n: Level of confidence of the interval [-B,B] )
Criterion
Single axle
Group of axles
Gross Weight
Relative error statistics n
36
18
18 m
(%)
-4.03
-4.89
-4.07 s
(%) no
(%)
14.90 93.1
21.42 90.3
12.13 90.3
Accuracy calculation
Class B
(%)
E(30) 36
E(50) 55
E(30) 30
Bmin
(%)
33.9
49.1
28.3
1t
(%)
94.8
94.1
92.4
Class
Retained
E(50 )
115
70kmlh 55kmlh 85 k mlh
3
- - - - - - - - - - - - - - - - - - - -
2
VJ c::
'@ b
VJ
0
;...
(.)
0
~
-1
2
-3
0 0.4 0.8 1.2 1.6 2
Time (s)
~ :~~ i :~~ t:: : .
. : : : : : : : : : : : : : : :
~
[ : = - : : : : -: : : : : : : : - :
80 - - - - - - - - - - - -
60
40
20
O~ ~~~~~ o
2 4 6 8 10 12 1 4
Frequenc y (Hz )
(a) Time Domain (b) Frequency Domain
Figure 1 Bridge response in free vibration due to 2-axle calibration truck (smooth profile)
A A
3.49 6.76 2 .
00
~I
Figure 2 - Two dimensional tractor and trailer vehicle model with steel-spring suspensions (11 degrees of freedom)
116
~~
45
I ~ ~
- A x l e 3
~ ~ ~ ~ ~ ~ ~ ~ ~ ~ ~ ~ ~ ~ ~ ~ ~ ~
25 50 75
Distance along the road (m)
100
(a) Air suspension at 55 kmlh
55
50
Z
~
45
40
Q) u
I -
0
[.I..
35
30
25
20
0 25 50 75
Distance along the road (m)
100
(b) Steel suspension at 55 kmIh z
~
Q)
U
Io
[.I.. o
25 50 75 100
Distance along the road (m)
Distance along the road (m)
(b) Air suspension at 85 kmlh (c) Steel suspension at 85 kmlh
Figure 3 - Applied forces by air- and steel-sprung fully laden tandem (smooth profile)
117
Axle 3
120
100
Z
0
Cl)
80
60
0
~
40
20
0
0 25 50 75
Distance along the road (m)
100
Ca) Air suspension at 55 kmlh
120
100
Z 80
0
Cl)
60
2
0
~ 40
20
0
0 25 50 75
Distance along the road (m)
100
120
100
Z
80
~
Cl)
60
Co) ....
&
40
20 o
25 50 75
Distance along the road Cm)
Cb) Steel suspension at 55 kmlh o
25 50
Distance along the road Cm)
Cb) Air suspension at 85 kmlh Cc) Steel suspension at 85
Figure 4 - Applied forces by air- and steel sprung fully laden tandem (rough profile) kmlh
75
100
100
118
Air suspension
Steel suspension
-50 o 10 20 30
First axle position (m)
40
(a) 55 kmlh er. c::
.~ -10 er.
2 -20
.~
~
-30
-40
-50 o
10 20 30
First axle position (m)
40
-50 o
10
(b) 70 kmlh (c) 85 kmfh
Figure 5 EffeCt of vehicle speed and suspension on bridge response (smooth profile)
20 30
First axle position (m)
40
119
~~ r
~ ~ ~ ~ ~ ~ ~ ~ ~ ~ ~
: : -:
:;l-
~"
~'
~j}tfrJ
.~ - -7 5 - - - - - - _i · - -
-100
-125 o
10 20 30 40
First axle position (m)
Air suspension
Steel suspension
(a) 55 kmlh
75
50
25 o
~=: ",, =~----~ i ~ ~ --'; ~ ' -; ~ ' ~iI_ ; ~
-25
-50
-75
-100
-125 o
10 20 30 40
First axle position (m)
75
50 r./) c:
.~
.t:: r./)
2 u
~
25
0
-25
-50
75
-100
-125 o 10 20 30
First axle position (m)
40
(b) 70 kmfh (c) 85 kmlh
Figure 6 Effect of vehicle speed and suspension on bridge response (rough profile)
120
5 o
~~~--,--, -~--~~ ~~
""
~
5
" ~-1O
1 --
- ~ :~~
1 1 : :
= _ - : : : = " _ _ ...
30 - - - - - - - - - - -
-35 - - - - - -" - - - - - - o
5 10 15 20 25 30 35
First axle position (m)
-
-
- Stati c strain due to f irst axle
- - Static strain due to second axle
Total sta t ic approximation
Simulated strain
( a) 55 kmlh
5
0
'"
"C;
1=
-5
-10
'"
"~
~
-15
-20
-25
-30
-35 o
5 10 15 20 25 30 35
First axle position (m)
5 o
-5
(b) 70 kmlh (c) 85 kmlh
Figure 7 - Calibration of a static B-WIM algorithm (smooth profile)
T
-
-
---------
-
-------
--
--
I
First axle position (m)
•
- From MS BWIM algorithm
80
70
Z
C
Q)
....
Q u..
60
50
40
30
20
10
0
0
_ _ _ _ _ _ :._ _ _ L _ _ _ _ _
5 10 15 20 25 30
First axle position (m)
From Simulation
80
70
60
Z
50
40
&
30
- - - - - - - - - - - - - - - - -
I
I
- - - - - 1 - - - - -
20
10 o
~ ~ ~ ~
__
~L-~
4 9 14 19 24 29 34
First axle position (m)
(a) Front axle (b) Rear axle
Figure 8 - History of axle forces for 2-axle calibration truck at 55 kmlh (smooth profile)
121
101.5%
101.0% u
:§
"-'
~
~
100.5%
100.0%
99.5
%
99.0%
98.5
%
98.0% o
B-WIM
El] MS-BWlM
55 70
Sp eed (krn/h)
85
(a) Gross Weight
125 %
120%
.
~
:§
115 %
"-'
~ 110%
~
105 %
100 %
95 %
105%
103%
.~
~ 100%
~
98%
~
95%
93%
90%
55 70
Sp eed (kmlh)
85
55
(b) Front axle (c) Rear axle
Figure 9 - WIM/static weight versus speed for 2-axle calibration truck (smooth profile)
70
Sp eed (kmlh)
85
122
10 o
~~~ --,--,---,---, ~~~
IZl c:::
.~ -10
IZl e
-20 u
~
-30
-40 , - -
I - ' - ,- - :
-50
1 : --~ -----~ --: o
5 10 15 20 25 30 35
First axle position (m)
............... Static strain due to first axle
-
- - Static strain due to second axle
- Total static approximation
Simulated strain
(a) 55 kmlh
10 o
~ ~ --.-,---,---~ ~~~
IZl c:::
.~
-10
1:::
IZl
0 l-<
U
~
-20
-30
-40
-50 o
5 10 15 20 25 30 35
First axle position (m)
Cb) 70 kmlh Cc) 85 kmlh
Figure 10 Calibration of a static BWIM algorithm (rough profile)
10
0
IZl c:::
.~
-10
IZl
2
~
20
-30
~;~ I ~ ~ ~ ~ ~ ~ ~ ~ _ ~ ~ ~ ' ~ ~ ~ ~ ~ ~ ~ ~ ~ ~ o
5 10 15 20 25 30 35
First axle position (m)
From M S-BWIM algorithm
120 - - - - - - - - .-
90
60
T _ ____ ____________ , _
I
-
--- --------- --
,
30 o
-30
-
I , -
-
- - -
-
,
-
-60
-90 o
5 10 15 20 25 30
First axle position (m)
Ca) Front axle (b) Rear axle
Figure 11 - History of axle forces for vehicle at 55 kmlh (rough profile)
From Simulation
120
90
Z
C
Q)
U l-<
0
~
60
30
0
-30
- - - - - - - - - - - - - - - - - -
I
-60
-90
4
-'- - - - - - '- - - - - - -
9 14 19 24 29 34
First axle position (m)
123
-
140
115
Z
~ a) u
~
0
~
90
65
40
15
-10
-35
-60
0
From MS-BWIM algorithm From Simulation
140
115
Z
~ a) u
Cs
~
90
65
40
15
-10
-35
-60
4
5 10 15 20 25 30
First axle position (m)
(a) Front axle (b) Rear axle
Figure 12 - History of axle forces for vehicle at 70 kmlh (rough profile)
9 14 19 24 29 34
First axle position (m)
-
200
160
Z
~
120
80 a) u
~
0
~
40
0
-40
-80
0
From M S-BWIM algorithm
5 10 15 20 25 30
First axle position (m)
From Simulation
200
160
Z
120
~
80 a) u
Cs 40
~
0
-40
-80
4
-------------~---
9 14 19 24 29 34
First axle position (m)
(a) Front axle (b) Rear axle
Figure 13 - History of axle forces for vehicle at 85 kmlh (rough profile)
124
110%
108% o~
~ en
106%
104%
~
102%
~
100%
98%
96%
94%
D B-WIM lE) MS-BWIM
55 70
Sp eed (kmlh)
85
(a) Gross Weight
300%
275% o~
~ en
~
~
250%
225%
200%
175%
150%
125%
100%
75%
110%
90%
.~ fl en
70%
~
50%
~
30%
10%
-10%
55 70
Sp eed (kmlh)
85
55
(a) Front axle (b) Rear axle
Figure 14 WIM/static weight versus speed for 2-axle calibration truck (rough profile)
70
Speed (krnlh)
85
Approx. total static strain Total strain - Approx. strain due to one axle
10
-~ -----------~ ---~-
0 en
I:
°ce
.b en
0 u
~
-10
-20
-30
-40
-50
I I I I
- - - - - - - - - - - - - - - - - - - - - o
5 10 15 20 25 30 35 40
First axle position (m)
10 o
~~,-~~ ~ --,--, ~ ~~,-~
-20
1---'
I
-30 - -
I
I
-40 ~ - - - - - -
T -
!
~
-
~
- -
~
j -50 - - - - - -
~
o
5 10 15 20 25 30 35 40
First axle position (m)
(a) Approximation for air suspension (b) Approximation for steel suspension
Figure 15 - Influence of suspension on static B-WIM (smooth profile)
125
-
100
From M S B WIM a lgorithm From Sim u lation
100
80
Z
~
Q) u
;....
0
~
60
40
20
0
0 5 10 15 20 25
First axle position (m)
80
Z
6
Q) u
0
~
60
40
2:
0
L
5 10 15 20 25
First axle position
( a) First axle
100
80
Z
~
Q) u
5
~
60
40
20
0
0
( b) Second axle
100
80
Z
~
Q)
~
0
~
60
40
20
0
I
0 5 10 15 20 25
First axle position
5
F
( c) Third axle (d) Fourth axle
Figure 16 - Instantaneous calculation for a leaf-sprung 4-axle truck (smooth profile )
10 15 20 irst axle position
25
126
-
120
100
Z
80
~
0) u
0
~
60
40
20
0
0
From M S-BWIM algorithm
5 10 15 20 25
First axle position (m)
From Simulation
120
100
Z
80
~
0) u
;.....
0
~
60
40
20
0
0
---1---
-
----------
----~-------------
5 10 15 20 25
First axle position (m)
(a) First axle
120
100
Z
~
0) u
(3
~
80
60
40
20
0
0 5 10 15 20 25
First axle position (m)
(b) Second axle
120
100
Z
~
0) u
;.....
0
~
80
60
40
20
0
0 5 10 15 20 25
First axle position (m)
(c) Third axle (d) Fourth axle
Figure 17 - Instantaneous calculation for a steel sprung 4-axle truck (smooth profile)
127
103 %
.c
102 %
01)
·03
~
101 %
.~
~ rZ)
~
~
100 %
99 %
98%
97 %
96 %
60
-
--
---------------
8 -
110
Static weight (kN)
160
• B-WIM o
MS-BWIM
(a) Gross vehicle weight
110 %
.c 105 %
01)
·03
~
100 %
.~
~ rZ)
~
~
95%
90 %
85%
80%
75%
15 50
Static weight (kN)
(b) Axle group
85
160%
.c on
· 03
~
.~
~ rZ)
~
~
140%
120%
100%
80%
60%
40%
15
(c) Individual axle weights
Figure 18 - WIM/Static versus real static weights for 4-axle truck (smooth profile)
-----+
25 35
Static weight (kN)
45
- Approx. total static strain Total strain - Approx. strain due to one axle
90
60
</) s:::
.c;:j b
</)
0
I u
~
30
0
-30
-60
-----------------~-
-;l - -
I _ _ .!... _ _ _ _ _ _ _ ' ' _ -90
-120
I
- - - - - - - - - - - - - - - - - - - o
5 10 15 20 25 30 35 40
First axle position (m)
30
°1"tIlliii~~
~
ftJ~IiIJ;ir""
~~~ i
~ ~ : ~ ~ ~
-' -
-90 - - - -
, I
-120 - -
I _ _ _ _ _ _ _ _ _ _ _ o
5 10 15 20 25 30 35 40
First axle position (m)
(a) Approximation for air suspension (b) Approximation for steel suspension
Figure 19 - Influence of suspension type on static B-WIM (rough profile)
128
............. From M S BWIM algorithm
150
125
Z
C
Cl) u
0
~
100
75
50
25
0
-25
0 5 10 15 20 25
First axle position (m)
From Simulation
150
125
Z
C
Cl) u
0
~
100
75
50
25
0
-25
0 5 10 15 20
First axle position (m)
25
(a) First axle
150
125
Z
C
Cl) u
;....
0
~
100
75
50
25
0
-25
0 5 10 15 20 25
First axle position (m)
(b) Second axle
150
125
Z
100
C 75
Cl)
~
~
50
25 o
-+-----, ------r~
-25 o
(c) Third axle (d) Fourth
Figure 20 Instantaneous calculation for a 4-axle truck (rough profile) axle
5 10 15 20
First axle position (m)
25
129
130 %
:c 1 20 %
01)
·v
~
110 %
.~
Cil ci5
~
~
100 %
90 %
80 %
70 %
-------D -
O _ --0 ----
60 %
60 110
Static weight (kN )
160
( a ) Gross v ehicle weight
200 %
:c 175 %
01)
·v 150 %
~
.
~
Cil
125 %
]00 % ci5
~ 75 %
~
50 %
25 %
0 %
15
(b) Axle group
50
Static weight (kN)
85
4> B-WI M o
M S-BWIM
400%
:c 300%
01)
·
v
~
200%
.
~
Cil ci5
~
~
100%
0%
-100%
200%
-300%
15 25 35
Static weight (kN)
(c) Individual axle weights
Figure 21 - WIMlStatic versus real static weights (rough profile)
45
130