Kyrre Glette Øyvind Tanum Ola G. Lein Erling Alf Ellingsen
advertisement
Kyrre Glette Øyvind Tanum Ola G. Lein Erling Alf Ellingsen Rune Martin Andersen Kristian Barek Øyvind Grotmol Kjetil Jørgensen November 26, 2002 BJARNES2 Broadband Operating eXperience Bidirectional3 Joint Access Routing Network Equipment Service 3 BBOX1 Integrated DIRECT Internet Open Network Access Layer 1 2 ii Abstract This document reports the autumn project of eight fourth-grade students at the Department of Computer Science and Information Technology, NTNU, Trondheim. The assignment was to make a multi-purpose box. Its main task was to make it possible to share a broadband internet connection. In addition it should be able to act as a home automation system. This project introduces a variety of different design techniques and tools, most of which were new to the students. They experienced the various aspects of a hardware design, the most important of which were PCB design, the use of a microcontroller and FPGA logic design. The project emphasized learning of various techniques rather than an optimal design. The report begins with an interpretation of the assignment, including a detailed requirements specification. After this it moves on to the design phase, explaining high-level design choices before going into the details. A test plan for the various parts of the design is presented. The results are then commented. A discussion of practical issues, like parts acquisition, implementation tools and problems encountered is also included. In the evaluation part technical and project workflow-related experiences are discussed. Pre-imposed design was restricted to the required presence of an Atmel microcontroller and a Xilinx FPGA. The rest of the design choices were made as a result of the group’s interpretation of the assignment and the following requirements specification. The design presented in the report includes the use of the already mentioned Atmel AVR microcontroller and Xilinx FPGA, as well as Crystal Ethernet controllers, a dualport SRAM buffer and a real time clock. The PCB layout is a four-layer design. It has two routing layers and planes for power and ground, where the power plane is divided into a 3,6V sector and a 5V sector. Components are mostly surface-mounted, and all components are mounted on the topside of the board. FPGA logic is used for optimizing the interface to the Ethernet controllers, doing block memory copies that would otherwise place too much of a burden on the microcontroller. Microcontroller tasks includes handling of IPNAT packet routing and control of the web server and DHCP server. It is also responsible for the home automation system, interfacing both an external X10 transceiver and a mobile phone. At the end of the project the product had not reached full functionality, in terms of the requirements specification. However, this was mostly a question of software implementation. After a pair of minor hacks the hardware design worked, although at a non-optimal speed. Given more time the design could have been perfected with extended networking and home automation protocol support. The logics could have been optimized further and a decent, user-friendly web interface could have been added. iii iv Foreword We, the authors of this document, are eight students from at the Norwegian University of Science and Technology (NTNU), Trondheim. This report summarizes the fourth grade autumn project (SIF8084) in the Computer Architecture and Design group at the Department for Computer and Information Science. The project makes up for half of the workload for the autumn semester, and spanned from 26th of August to on 22nd of November. The main purpose of this project is to get familiar with hardware development and to get experience of working with big projects. The project takes on the whole cycle from customer requirements to the final product, with focus on design and implementation stages. We would like to thank our instructors Karstein Kristiansen and Morten Hartmann, and also Gunnar Tufte, for support and follow-up. Gaute Myklebust from Atmel also deserves thankyous for supplying us with the newest and hottest Atmel products for our project. Finally, thanks to Asbjørn Djupdal and Geir Svihus for sharing valuable hardware experience, including Foundation makefile secrets and PCB tips. Trondheim, November 14, 2002 Øyvind Tanum Ola G. Lein Erling Alf Ellingsen Rune Martin Andersen Kristian Barek Øyvind Grotmol Kjetil Jørgensen Kyrre Glette v vi Contents 1 Introduction 1 2 Assignment 5 2.1 Description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7 2.2 Interpretation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7 2.3 Requirements specification . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8 2.3.1 Functional Requirements . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8 2.3.2 Non-functional Requirements . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9 2.3.3 Testability Requirements . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9 2.3.4 Requirements elaboration 9 3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . System design 13 3.1 Design choices . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15 3.1.1 Block diagram . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15 3.1.2 Microcontroller . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15 3.1.3 FPGA . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16 3.1.4 Ethernet controller . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16 3.1.5 Dual-Port SRAM . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16 3.1.6 Mobile phone . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16 3.1.7 Backup power source . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17 3.1.8 X10 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17 3.1.9 Real Time Clock (Timekeeper) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17 3.1.10 Rejected options . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17 PCB design . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18 3.2.1 Board . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18 3.2.2 Components . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20 3.2.3 Connections 25 3.2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . vii viii CONTENTS 3.2.4 Design choices . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28 FPGA - microcontroller interaction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29 3.3.1 Division of labor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29 3.3.2 Connection protocol . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30 3.4 FPGA Design . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30 3.5 Microcontroller design . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33 3.5.1 Nut/OS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35 3.5.2 Home Control System (HCS) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36 3.5.3 Web Interface . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37 3.5.4 Mail alert . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38 3.5.5 IPNAT Routing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38 3.5.6 Timekeeper Real Time Clock (RTC) . . . . . . . . . . . . . . . . . . . . . . . . . . 38 SMS Communication . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39 3.6.1 Description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39 3.6.2 Communicating with the cell phone . . . . . . . . . . . . . . . . . . . . . . . . . . 39 3.6.3 AT commands . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41 3.6.4 The PDU message format . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42 3.7 Packet trace . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44 3.8 Home Control System (HCS - X10) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44 3.9 Box . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47 3.9.1 Overview . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47 3.9.2 Design sketches . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47 3.9.3 Dimensions and Drill Schematics . . . . . . . . . . . . . . . . . . . . . . . . . . . 48 3.9.4 Plexiglas logo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49 3.3 3.6 4 Testing 51 4.1 PCB test . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53 4.2 FPGA test . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53 4.2.1 Unit Testing during Development . . . . . . . . . . . . . . . . . . . . . . . . . . . 53 4.2.2 Modular Behavioral Simulation . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53 4.2.3 On-Board Testing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56 4.3 Microcontroller test . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56 4.4 System test . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64 4.4.1 64 Network performance tests . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . CONTENTS 4.4.2 5 5.2 65 67 Software used . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69 5.1.1 Mentor Design Capture/Expedition PCB . . . . . . . . . . . . . . . . . . . . . . . 69 5.1.2 Xilinx Foundation 3.1i . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69 5.1.3 Aldec Active-HDL v4.2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69 5.1.4 Atmel AVR Studio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70 5.1.5 AVR-GCC . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70 Hardware used . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70 5.2.1 Atmel STK 500 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70 5.2.2 Atmel AVR Embedded Internet Toolkit . . . . . . . . . . . . . . . . . . . . . . . . 71 5.2.3 XILINX FPGA test board . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71 5.2.4 Hewlett Packard Logic Analyzer . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72 5.2.5 DEC VT320 teletype . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72 Notes 73 6.1 Design flaws . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75 6.2 Status . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75 6.2.1 MCU . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75 6.2.2 FPGA . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75 6.2.3 PCB . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 76 Future expansions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 76 6.3.1 More RAM . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 76 6.3.2 Expansion Port (’Geek port’) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 76 6.3.3 More HCS protocols . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 76 6.3.4 PPPoE . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 76 6.3 7 Power . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Tools 5.1 6 ix Discussion 77 7.1 Workflow . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79 7.2 Experiences . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 80 7.2.1 General . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 80 7.2.2 Tutorials . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 80 7.2.3 Software development . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 80 7.2.4 Teaching . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81 x CONTENTS 7.2.5 Learning . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81 7.3 The product . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81 7.4 Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82 8 Acknowledgements 83 9 Bibliography 87 List of Figures 1.1 Overall model . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3 3.1 Block diagram . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15 3.2 PowerPlane . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19 3.3 Components . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20 3.4 Microcontroller Components . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21 3.5 FPGA Components . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22 3.6 Memory Components . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22 3.7 Ethernet Components . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23 3.8 Serial Components . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23 3.9 Power Components . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24 3.10 Block Diagram . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30 3.11 I/O Module illustration . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31 3.12 Microcontroller design overview . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34 3.13 SMS thread model . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40 3.14 Front panel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48 3.15 Back panel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48 3.16 Dimensions. Backpanel (Top) - Frontpanel (Bottom) . . . . . . . . . . . . . . . . . . . . . 48 3.17 Plexiglas logo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49 4.1 Network performance test setup . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64 5.1 Atmel STK 500 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70 5.2 Atmel AVR Embedded Internet Toolkit . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71 5.3 XILINX FPGA test board . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71 5.4 Hewlett Packard Logic Analyzer . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72 5.5 DEC VT320 teletype . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72 xi xii LIST OF FIGURES 7.1 The BBox . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82 List of Tables 3.1 Hole diameters . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19 3.2 Register list . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31 3.3 Ethernet Controller Module Registers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32 3.4 Ethernet Controller Module Control Register Bit List . . . . . . . . . . . . . . . . . . . . . 32 3.5 Ethernet Controller Module Status Register Bit List . . . . . . . . . . . . . . . . . . . . . . 32 3.6 Siemens AT commands . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41 3.7 Received PDU format . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42 3.8 Transmitted PDU format . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43 3.9 7 to 8 bit translation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43 3.10 Header format . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45 3.11 Address/function byte . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45 3.12 House and device codes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46 3.13 Function to binary mapping . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46 4.1 PCB test plan . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54 4.2 Module test . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55 4.3 On-board testing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56 4.4 MCU test plan, part 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58 4.5 MCU test plan, part 2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59 4.6 MCU test plan, part 3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60 4.7 MCU test plan, part 4 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61 4.8 MCU test plan, part 5 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62 4.9 MCU test plan, part 6 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63 4.10 Ping command . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64 4.11 NAT verification . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65 4.12 Latency test . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65 xiii xiv LIST OF TABLES Chapter 1 Introduction 1 2 Introduction 3 The task assignment of this project was to build a multi-purpose box for Bjarne, our virtual customer. We have decided to call the box BBox. The box was to make it possible to share a broadband Internet connection. This is usually not possible with a normal Internet Service Provider, as you usually only get assigned one Internet address (IP). BBox should allow you to connect several computers and let them all hide behind one IP address. In addition, the box was to have several features not directly related to the networking part: It would function as a home automation controller, giving Bjarne the ability to control his home appliances from elsewhere on the Internet or via a mobile phone. It should also be possible to connect various sensors to the BBox, and have the BBox page the owner via SMS. The concept is described in figure 1.1 (page 3). This model shows the BBox as the middle link between Bjarnes home, the Internet and a GSM telephone network. Multiple computers and home appliances can be connected to the box, making the home automation as flexible as possible. Figure 1.1: Overall model 4 Introduction Chapter 2 Assignment 5 6 Assignment 2.1. Description 7 2.1 Description This is the assignment description we were given at the start of the project: Bjarnes Bredbånd Bjarne har fått installert bredbånd. Han bor i kollektiv med flere andre studenter og vil kanskje dele bredbåndet med andre. I tillegg ønsker ikke Bjarne at andre skal kunne bryte seg inn i det interne nettverket han eventuellt deler med sine naboer. Bjarne ønsker også muligheten til å styre diverse elektriske apparater og installasjoner i sitt eget hjem over nettet,og overvåke hjemmet utenfra via nettet. En annen sak som Bjarne kunne ønsket seg var at hvis det skjedde uventede ting som oversvømmelse, innbrudd og kanskje strømbrudd så ville gjerne han og ett eventuellt vaktselskap ha beskjed om det så fort som mulig. Etter en lengre og ganske omfattende markeds undersøkelse finner ikke Bjarne den ultimate boksen som kan gi han alt dette. Utstyr for å styre diverse elektrisk utstyr i hjemmet og diverse sensorer for å overvåke hjemmet finnes,men ikke den boksen som "syr" sammen alt dette. Bjarne spør en av de andre han bor sammen med, en fjerde års student på datamaskingruppa på NTNU om hun kan tenke seg å lage den boksen som kompletterer Bjarne sitt behov for "kjekt å ha bokser" i hjemmet. En rask skissering fra Bjarne sin side over ønsket behov er som følger. • En boks som kobles opp mot en ekstern bredbåndsleverandør • Som gjør det mulig for flere å dele samme bredbånds forbindelsen • Som også nekter uvedkommende å komme seg inn på det interne nettverket • Med muligheter for å styre og kontrollere diverse elektriske apparater ved hjelp av andre eksisterende bokser som allerede er på markedet som kobles til Bjarne sin drømmeboks. Bjarne er også en person som liker "dingser" og er helt åpen for forslag for å gjøre hverdagen enklere og bedre. Derfor legger han ingen begrensninger på eventuelle innspill og ideer du måtte ha for å kompletere boksen hans ennå mere. Kom også gjerne med dine innspill om hvordan den bør kunne brukes, betjenes og forenkle hverdagen. Sett derfor opp din(e) ide(er) til hvordan Bjarnes-Boks bør realiseres med de elektronikk komponentene du har tilgjengelig. 2.2 Interpretation The requirement specification given in the course was very vague. We were encouraged to make our own interpretations and provide comments and suggestions. Our interpretation of the specification follows. • Connect to an external broadband provider. • Let several users share the same broadband connection. • Control of electronic devices in a house through an external control device. • Disallow unauthorized external access. The BBox has two network interfaces. One of them will connect to a broadband modem or router. It is assumed that this router will be able to communicate with IP over Ethernet. Certain broadband modems only 8 Assignment support PPPoE 1 . The BBox will not support this protocol, although trivial, it would be a time-consuming and non-interesting task to implement. Using IP Network Address Translation to route IP packets from one Ethernet interface to another, the BBox will allow several users on the LAN to simultaneously use the broadband connection. The BBox will implement a DHCP server to ease the configuration of the computers on the LAN. The BBox will not allow any unauthorized access to the inside of the local network, for the simple reason that the BBox will be unable to determine the recipient of the unauthorized package. Further firewalling features, such as analyzing the packets for possible hazards or detecting IP spoofing attempts, will not be implemented. The X10 protocol is a protocol for Home Automation devices. There are several manufacturers of X10 compatible products. The product range includes light switches, dimmers and motion detectors. This makes X10 a suitable protocol for the BBox. The BBox will be able to detect break-ins and other unusual situations from various devices in the house. The prototype of the BBox should have a backup battery, so that in case of a power loss it will be able to send an SMS message to a specified number. 2.3 Requirements specification From the assignment description and our own interpretation of the task, we have made a requirements specification. Lacking a real customer, these requirements are constructed by ourselves and are what we consider as reasonable requirements for the product. We also decided on some testability requirements, although not interesting for the customer, these are important for the design process, especially for the prototype designs. 2.3.1 Functional Requirements Network Requirements The Box should: • be able to share an internet connection with several computers. • disallow unauthorized external access and provide notification to owner if such attempts are made. • provide a web interface to the Home Control System. • provide email notification. • provide a load meter to indicate the amount of network saturation. • allow for limiting of network traffic to certain computers. Home Control Requirements The Box should: 1 PPP over Ethernet, used primarily for operators to be able to meter usage and bill per gigabyte. 2.3. Requirements specification 9 • be able to control and receive input from external home control devices via an external controller interface. • be able to alert and communicate with the owner based on input from external devices. • be able to respond to input from external devices based on a set of user defined rules. • be controllable from a personal computer, either from the local computer network or the internet. 2.3.2 Non-functional Requirements The Box should: • be designed for users which have basic experience with computers. • have a compact and appealing design. • run on a standard 230V AC net. • be able to operate for a limited time without an external power supply. • be able to operate in a normal home environment. 2.3.3 Testability Requirements The box should: • have test pods on all vital PCB traces. • use as many socket mounted components as possible. • have a serial interface for debugging. • provide spare pins with VCC and GND on the PCB. • have several status LEDs on the PCB. • include boundary scan possibilities for both the microcontroller and the FPGA. 2.3.4 Requirements elaboration This is a more detailed specification of the requirements presented in the previous lists. Requirements that require further explanation are detailed. Internet connection sharing. • The box should be able to share an internet connection with several users. To accomplish this, each computer needs to have its own IP address. The BBox should support a limited form of IP Network Address Translation (IPNAT), so that an internet connection with a single IP address can be shared. • The box should be able to act as a DHCP server to provide the local computers with dynamically assigned IP addresses. 10 Assignment • The box must be able to cope with a data rate of at least 2 Mbit/s. • The box should have two standard 10-megabit RJ45 Ethernet connectors, one for the external internet connection, and one for the Local Area Network (LAN). Access control • The box should not give unauthorized users access to the Local Area Network. The box should reject internet packets that are not part of an existing outgoing connection unless its destination is specifically assigned by the owner. Web interface • The box should provide a web interface to control and view the status of various home control devices that are connected to the box. The box should provide a simple access control to the web interface. Computers on the local network should have more privileges than external computers. Possible hazardous operations should not be available through the external web interface. Email notification • The box should provide an audiovisual notification when the owner has received email, within a short amount of time. Load meter • The box should provide a visual presentation of the current traffic load average. Traffic limit • The user should be able to control the maximum amount of traffic allowed for each local computer. Home Control I/O • The box should be able to communicate with the X10 CM11A home control interface via a RS232 port. It should not have to communicate with X10 devices directly. Owner Communication/Alert • The box should be able to alert the owner in case of an extraordinary situation (burglary, flood, power loss, etc.) via an SMS message. • The box should be able to receive simple commands via SMS messages from the owner. The box should only accept messages from certain phone numbers. 2.3. Requirements specification 11 Control • The box’s behaviour should be programmable, ie. the user should be able to specify actions for different inputs, program actions to be performed at a specific time etc. • The box should be controllable from a PC connected to the network. It should also be possible to connect to the RS232 and communicate directly with the box for maintenance purposes. Testability Requirements The points specified in the testability requirements are very important for helping us develop the system. Since we are building a prototype, we do not find it very important to make an extremely compact or perfectly routed design. Generous spacing between components makes it easier to cut traces and make modifications to the PCB if necessary. Large component with sockets also makes the PCB larger and thus more expensive than necessary. Testpods, extra power pins and a lot of the status LEDs are also features that will exist only on the prototype. The final version of the BBOX will probably be a lot more compact than this prototype that we are making. 12 Assignment Chapter 3 System design 13 14 System design 3.1. Design choices 15 3.1 Design choices 3.1.1 Block diagram This chapter describes how we planned the BBox would be implemented. It contains some information of the most important components, and how they work together. The end of the chapter also contains the options that were discarded. The overall system design is described in figure 3.1 (page 15). Figure 3.1: Block diagram 3.1.2 Microcontroller The use of the Atmel ATmega128 8-bit RISC microcontroller was a requirement in this course. The microcontroller deals with the following tasks in our design: • Web interface Web interface is needed to make HCS functionality available through the web, and to make it possible to configure routing options of the IPNAT. • DHCP Server for LAN DHCP clients To make it easier for computers to connect to the LAN, a DHCP server is used to handle internal IP addresses. No IP configuration is thus needed for the connecting computers. • Communication with the X10 interface X10 commands are sent and received by the microcontroller through the X10 interface connected at one of the serial ports. • Communication with the cell phone AT commands to and from the cell phone are sent and received by the microcontroller. The cell phone is connected to one of the serial ports using a data cable. 16 System design • IP Network Address Translation (IPNAT) Because the ISP only provide one real IP address, translation is needed when multiple computers are connected using the BBox. The NAT makes sure all IP packets are routed to the correct destination on the LAN. • Initialization of the Ethernet controllers The microcontroller initializes the ethernet controllers by giving them IP addresses, and setting up routing rules. 3.1.3 FPGA The use of the Xilinx 4044XLA FPGA was a requirement in this course. The FPGA communicates with the Crystal CS8900A Ethernet Controllers. When necsessary, it will allow the microcontroller to communicate directly with a certain controller in order to initialize it. The FPGA handles transfer of ethernet between the dual-port SRAM and the ethernet controllers. It is believed that the microcontroller will be unable to handle the amount of network traffic and still be able to perform the other tasks of the BBox satisfactory if the packets are to be transferred by the microcontroller itself. The FPGA will also scan the packets for certain strings in the case of certain protocols that carry information relevant to IPNAT inside the packet. This will ensure that there will be no significant overhead in handling these packets. 3.1.4 Ethernet controller The Crystal/Cirrus CS8900A Ethernet Controller is a 10 MBit ethernet controller that can operate in several different modes. In our design we use two controllers, both operating in 8-bit polling mode. These are connected to the FPGA, which constantly poll them for new data. Since a dedicated piece of control logic is implemented in the FPGA, this operating mode will be almost as efficient as an interrupt driven mode. The CS8900A is a popular controller for use with the AVR microcontroller family, and is well documented. 3.1.5 Dual-Port SRAM Part of the SRAM is used by the microcontroller for its day-to-day operation. For the networking subsystem, both the FPGA and microcontroller will access the same area of memory. The FPGA will blit a packet quickly from the NIC into SRAM, where the microcontroller will examine and decide what to do with it. On the microcontroller side, a latch is used to make it possible to address 64K of memory using 8 address lines. On the FPGA side, 16 address lines are used. 3.1.6 Mobile phone A mobile telephone will be used for simple communication with the user. This is practical when the user does not have access to a network connected computer. It will also be used for critical alerts like burglary. The phone will be a Siemens C35 model. First option is for it to be built into the box and fitted with an external antenna. But because the GSM signals might interfer with the electronics inside the box, it is possible that we have to place the phone on the outside. 3.1. Design choices 17 The phone will be controlled by the microcontroller, using a serial connection. It will be connected directly to the TTL connectors if possible. Otherwise it will be connected to the DSUB via a Siemens data cable. Communication with the phone will be through the Hayes AT commands, extended for mobile phones. These can be used for sending and receiving SMS messages. Incoming messages will have to be checked for validity. The sender’s number will be checked against a list and there will be a password check. The messages will then be parsed and the command will be sent to the control program. The control program can also be configured with actions so that some events will trigger a message sending command. Also, in case of a power loss the phone and the microcontroller will receive power from a backup power source for enough time to send an SMS alert message to the phone. This message will be sent to the user or an some kind of alarm central. 3.1.7 Backup power source A battery is not included in the prototype. However we have considered several options for power supply in the event of a power loss. One alternative would be to use the battery on the Siemens C35 cellular phone or simply a rechargeable battery. This would, however, require additional work and components on the PCB, for instance charging circuits. We were advised by the course teacher to just simulate a power loss through an external signal. 3.1.8 X10 With X10 being the most wide-spread home control system in use today, we decided to use the X10 line of products from Marmitek. The CM11A home control interface provides access to X10 control- and sensor devices. There are several third party, free utilities that support the CM11A. 3.1.9 Real Time Clock (Timekeeper) The Timekeeper (R) chip from STMicroelectronics is a battery powered RTC (Real Time Clock) and SRAM. When the power supply to the Timekeeper falls below a certain value, the RTC and SRAM will transparently be switched from external to battery power supply. In our design, the Timekeeper will provide an accurate date and time to the BBox. Additionally, it can provide the BBox with external non-volatile memory that can be used for storing configuration data. 3.1.10 Rejected options • USB support Plans were made to implement USB support on the box. This would make it possible to connect a webcam or similar to extend the home automation to a complete alarm central. But because of the complexity of the USB support, the plans were discarded. Instead we decided to focus on the SMS and X10 integration. • Graphic display A 640x480 LCD was also made available for us, and we had plenty ideas for how we could make use of it. One idea was to integrate it in the top of the box, making it a wall mounted module. The house could then be displayed on the screen, showing status information for each room. Network load monitor, mail notification, etc could also have been displayed. Unfortunately using a display meant that we had to write a display driver and a controller. The backlight was also broken, meaning that 18 System design we would have to improvise a new light. This would result in a great deal of extra work. Such a display on the BBox would have seemed somewhat malplaced anyway, as the box is just intended as a supplement to a computer. We decided instead to use LEDs for load meter and mail notification, and a web interface for home automation. A web interface makes perfect sense as the computer, which is guaranteed present in the household, already has a far superior user interface. • Keypad Likewise, a keypad could have enabled the user to control various features of the box without having to use the web interface. However, a keypad would only come to its full right when used with a display. Without a display, the keypad could at most be used to control simple features, e.g. X10 house control. This feature would probably best be implemented through a separate X10 remote control. The user interface argument from above applies here as well. • Additional microcontrollers An additional ATmega128 microcontroller was considered. We decided that one microcontroller would be able to handle the amount of work if the microcontroller did not have to transfer the IP packets itself. If we had included a graphic display in the design, we would probably have included an additional microcontroller to handle the graphics. • Integrated Hub To enable multiple users to connect to the internet through the box, we thought about creating an integrated hub. Instead we decided to create only one port in and one port out, so that the user could connect an independent HUB to the box if more than one connection was needed. 3.2 PCB design 3.2.1 Board General The size of our PCB is 218mm * 210mm, and it consists of 4 layers. The top and bottom layers are used for routing. While the bottom layer is just used for routing, all components are mounted on the top layer. The components used are a wide collection of Surface Mounted Devices (SMD) and Through Components. There are 230 components with a total of 1348 pins; 121 SMD and 109 through mounted devices. The second layer is the ground layer and the third layer is the power layer. Layers The Gerber files for the layers are provided in the appendix. • The Top Layer (Layer 1) Most lines in this plane have a width of 12 mils to allow for manual changes in case of design errors. However, some were given a width of 10 mils to allow full routing. The line spacing is 8 mils. The Top Layer is used for horizontal routing. • The Ground Layer (Layer 2) The entire plane is used for the ground signal, as it is needed by most components. 3.2. PCB design 19 • The Power Layer (Layer 3) The power layer is divided into two areas with different voltage. Most of the components used require 5V, except the Xilinx XC4044XLA Field Programmable Gate Array (FPGA) and its belonging SPROM (XC1701L). The FPGA and SPROM run on 3.6V. Figure 3.2: PowerPlane We considered using only 5V or only 3.6V. However, we had components in stock with differing voltages. The Xilinx components required 3.6V, while the Ethernet controllers and the TimeKeeper required 5V. The microcontroller is limited to 8MHz with 3.6V, and the logic level is 5V. With this in mind, we decided to use a split power plane. Therefore, we use the 5V version of the microcontroller so that we may operate it at 16MHz. • The Bottom Layer (Layer 4) This layer is used solely for routing. The line widths are set to minimum 10 and typical 12 mils to allow manual changes in case of design errors. The line spacing is minimum 8 mils. The bottom layer is used for vertical routing. Holes All hole sizes were selected from Elprint’s aperture table [17]. We also strived to reduce the number of different hole sizes, thereby reducing the price and delivery time of the PCB. The holes used are as listed in table 3.1 (page 19). Diameter (in) 0.012 0.035 0.047 0.063 0.130 Quantity 628 428 109 18 17 The vias Table 3.1: Hole diameters The placement of the holes is displayed in the appendix. 20 System design 3.2.2 Components This section contains short descriptions of the different components used in the design. The listing is meant for easy reference. Components are mostly sorted according to the schematics and where they logically belong. Some common components that are used multiple places, are described under the heading "Various". In figure 3.3 (page 20) you can see the PCB complete with all components. Figure 3.3: Components Microcontroller • Microcontroller (ATMEL ATMega128) The Atmel ATMega128 microcontoller is the central processing unit for the entire box. • Mobile phone A mobile phone will be connected to the box through a serial interface. • X10 We will use an external device, CM11, to connect the box to other X10 devices. The communication will proceed through a serial interface. • TimeKeeper (M48T02) The primary purpose of the TimeKeeper is to keep track of the time with its real time clock (RTC). In addition to the RTC, it contains 2KB of nonvolatile memory. This may be used for storing settings etc. • Latch (74ALS573B) 3.2. PCB design 21 Figure 3.4: Microcontroller Components The latch is needed because the microcontroller uses the same port for the lower address bus and the data bus when accessing the memory. The latch holds the address while data is being read from or written to memory. This arrangement is used for both the TimeKeeper and the dual-port RAM. We considered using the cheaper 74HC573 from the HC series, but that chip is not specified for the high frequencies used in our high-performance design. • MUX (74HC4053) The mux is needed because some of the pins of the microcontroller have alternate functions. • JTAG Connector The JTAG interface is used to debug the microcontroller. • SPI Connector The Serial Programming Interface is used to program the microcontroller. • Crystal A 16 MHz crystal provides the clock reference for the microcontroller. Field Programmable Gate Array (FPGA) • Field Programmable Gate Array (Xilinx XC4044XLA) The main functionality of the FPGA is to transfer packets between the RAM and the two Ethernetcontrollers according to instructions from the microcontroller. • Serial Programmable Read Only Memory (SPROM) (XC1701L) When the BBox is powered up, the FPGA needs configuration. On everyday use the data needed is provided by the SPROM. On power-up the FPGA reads information from the SPROM and configures itself. 22 System design Figure 3.5: FPGA Components • Econ Oscillator/Divider (DS1075M) The Econ Oscillator provides the clock signal for the FPGA. It is adjustable in 513 steps up to 100MHz. Thus, the speed of the FPGA may be tuned to gain optimal performance. • JTAG MultiLINX Connector The JTAG interface allows debugging of the FPGA. • XChecker Connector The XChecker connector is connected to the FPGA and provides the possibility to connect a PC, via the serial port, to the FPGA. This cable connection allows direct programming and debugging of the FPGA. In other words the XChecker is used in the programming and testing phase, while the SPROM is used when the product is finished. Memory Figure 3.6: Memory Components • Cypress Dual Port SRAM (CY7C009) The main memory in the system is dual ported to allow both the microcontroller and the FPGA access. The FPGA will buffer incoming packages in RAM and inform the microcontroller. The controller inspects it and instructs the FPGA with what to do. 3.2. PCB design 23 Ethernet Figure 3.7: Ethernet Components • Ethernet Controller (Cirrus CS8900A) The Ethernet controllers are the interface between the FPGA and the local and external networks. • Ethernet Isolation Transformer (TG42) The isolation transformer provides a galvanic isolation to the ethernet controller. • Ethernet Connectors (RJ45) These are the external LAN/WAN connectors. • 20 MHz Crystal The 20 MHz clock crystal sets the ethernet controller speed. Serial interface Figure 3.8: Serial Components 24 System design • Serial Level Shifter (Maxim MAX202CPE) This device provides the interface between the TTL levels from the microcontroller and the RS232 serial cables. • SerialChooser To allow direct access to the TTL serial ports at the microcontroller, a connection strip has been included. When the DSUB is used, pins 3 and 4 should be shorted. Direct access is provided through pins 2 and 3, while pin 1 is not connected. Thus, it is ensured that both options are not enabled at the same time. • Serial Connectors (DSUB9) The X-10 controller is connected externally via one of the serial connectors. Furthermore, these ports may be used in the development process. Should the direct TTL connection to the mobile phone fail, we will use one of these serial connectors instead. The sex of the connectors is male. • Capacitors Capacitors have been added to the Maxim chip in accordance with an application note. We were hinted that it would be advantageous to increase the value of the decoupling capacitor for the chip to 1uF. Power Figure 3.9: Power Components • 9V Connector The 9V power connector is connected to a 9V external Direct Current (DC) power supply. • Diode Bridge Rectifier (1KAB20E) Since there is no standard polarity considering 9V power supplies, a rectifier is included to ensure desired polarity. • Adjustable Voltage Regulator (CS-5203A) To provide correct voltage to the power planes, two voltage regulators are used to transform the 9V input to the desired 5V and 3.6V. • Decoupling capacitance We used the general rule of thumb that each power supply pin requires one 100nF decoupling capacitor. 3.2. PCB design 25 Various • Philips LED Shift Register (HEF4894BP) This device is convenient as it allows any number of LEDs to be controlled using only two or three output pins. Each device controls 12 LEDs, and it is possible to connect several in series. The FPGA is connected to one for debugging. The microcontroller is connected to one for debugging and one for status information at the front panel. The LEDs that will be mounted at the front panel, are connected to the board with jumpers. The others are soldered direct on the board. • Resistors Generally, resistors from the E12 series have been preferred. These are the most common values and thus the most available. Only where specific values are required has this principle been broken, as is the case for the 4.99KOhms reference resistor required for the Ethernet controllers. The 24.3 Ohms values specified in the design files were found in an application note, but they are not very critical. Therefore, 24.5 Ohms resistors were created by sandwiching 27 and 270 Ohms resistors from the E12 series. We have used 10K Ohm pull-up resistors throughout the design. This is the most common value, and the power consumption is not critical enough to imply that we should risk using a higher value. For the LEDs, we used 390 Ohm resistors. With 5V supply voltage and 2V drop across the diodes, this should give 7.7mA current, which is within the normal operation range. Six of the diodes enlighten the BBox logo in the front panel. These use 47 Ohm resistors instead, which results in 20mA current. The increased power consumption gives a stronger glow in the logo and will likely make the product more attractive to fashionable customers. 3.2.3 Connections This section contains information regarding the connections between the components, in accordance with the schematics. The schematics can be found in appendix B.1. Each page in the schematics has its own subsection. BBox The top level, BBox, contains no components itself, only other blocks. The components have been divided into the blocks according to their logic connections. Power The power connector is connected to a diode bridge. This is because there is no standard as to the polarities of the plug, so that we have to ensure correct polarity in both cases. The power is connected to large decoupling capacitors before entering the voltage regulators. There is one regulator for each power plane, 5V and 3.6V that is. The resistor values are selected according to formulae given in the data sheet [11] to yield the desired voltages. A diode is provided for each regulator to provide additional overload protection. There are also large decoupling capacitors at the internal side of the regulators to stabilize the voltages under varying current loads. Connection pins to ground and the two power planes provide easy access and thereby facilitate measuring. Furthermore, one LED for each level provides fast visual notification in the case of total voltage loss. 26 System design Several jumpers with ground and power connection are spread across the board in case of design errors. If some unconnected pin needs to be tied to a certain voltage level, this will prove to be useful. There are six jumpers with 5V and two with 3.6V. Microcontroller The microcontroller is one of the most complex chips in the design and has extensive connections since it controls the operation of the entire board. A 16Mhz crystal with two capacitors provides the necessary clock signal for the controller. The 8-bit direct bus is provided for fast communication between the controller and the FPGA. With a high traffic load on the Ethernet, a high throughput may be required between these components. A two-bit handshake bus is also provided for synchronization signals. The direct bus uses port B, and the handshake bus uses the two lowest bits of port D. The ISP connector is provided for programming the controller. A multiplexer is connected in between because the pins used for ISP are also used for the serial port A and one of the IO pins in port B, which we use for the direct bus. The multiplexer is controlled by the reset signal. The JTAG Connector allows boundary scan for debugging purposes. 24 LEDs are connected using only three pins on the controller. This is made possible by connecting to shift registers with parallel output in series. Half the LEDs are used for status information in the front panel and enlightening the BBox logo, while the rest are used for debugging purposes. A button is provided for resetting the controller. 4 switches allow control signals to be given to the controller. This is useful for debugging and possibly also for user settings of a more permanent nature. Serial port A and B are both used for communication with the X10 interface box and the cell phone during normal operation, and with PCs during debugging. The microcontroller uses port A for both the lower part of the memory address and the memory data bus. The recommended solution for this is using a latch, which is also what we have employed. During a memory IO operation the lower address part is first loaded into the latch, and then port A can be used as a data bus. Two memory chips are used in the system. The Timekeeper only contains 2KB of memory and it primarily used for its built in Real Time Clock and long-lasting battery. The other chip is the dual port SRAM. The RAMSelect signal is used to alternate between these memories. Serial Interface A RS-232 Level Shifter, the Maxim 202CPE, is used to transform the TTL signals from the microcontroller into the higher voltage level used externally. Two male DSUB connectors on the board provide the physical connection and are mounted on the back of the BBox for easy access. The purpose of the SerialChooser is to circumvent the Level Shifters for cell phones that use TTL themselves. In such cases, the phone may be connected directly on the middle pins (2 and 3) of the SerialChooser. Otherwise, pins 3 and 4 must be shorted. This is because the Level Shifter is disconnected during the direct TTL connection to prevent it from driving the output signal. 3.2. PCB design 27 FPGA The FPGA is the link between the microcontroller and the two Ethernet controllers. An SPROM is used to store the configuration data for the FPGA. This is necessary since the data is lost during power down. An XChecker connector is used to program the FPGA and the SPROM. A JTAG connector provides boundary scan for debugging. The upper side, IO99 through IO129, is used for address, data and control signals for the LAN controller, Ethernet1. Similarly, the right side, IO65 through IO95, is used for the WAN controller, Ethernet2. The right side, IO3 through IO32, is primarily used for the dual port RAM. These signals are the 17 address bits, 8 data bits and the read/write select. The bottom side is used for various signals that are described below. The Direct and Handshake bus to the microcontroller occupy IO33 through IO42. 12 LEDs are connected to IO49 and IO50 for debugging purposes. 4 switches are connected to IO53 through IO56 for control signals during debugging. One of these switches is also used to control M0, M1 and M3, which determine whether configuration data is to be read externally from the XChecker or from the SPROM during initialisation. A button is provided for resetting the FPGA and the SPROM. Clock Generator The Econ Oscillator generates the clock signal for the FPGA. This chip was selected because the speed can be set up to 100MHz. The programming will be performed outside of the board, so it is placed in a socket. Therefore, the only connection with other blocks is the clock signal going to the FPGA. Ethernet An Ethernet connection was used also in the last year’s project. Therefore, resource efficiency required us to reuse their design. However, this meant that we had to be very critical since the design was created by freshmen. Indeed, several weaknesses and flaws were detected and had to be corrected. We also introduced testpods to facilitate testing. A 20MHz crystal with capacitors provides the clock signal for the Ethernet controller. We do not use the DMA functions of the Ethernet controller since the FPGA is responsible for transferring the data. Therefore, the DMA signals are tied or left unconnected. The address, data and control signals are all connected direct to the FPGA. The RJ45 connector is the external physical connection. The TG42 Ethernet Isolation Transformer changes the voltage level before the signals enter the controller. The LINKLED and LANLED provide the user with status information, and the BSTATUS LED is used for debugging purposes. 28 System design LEDs LEDs are used extensively in the design for debugging purposes. They provide fast visual information and as such are valuable in the software development process. When the board is modified for mass production, these LEDs are likely to be abandoned to reduce production costs, board size and power consumption. The CLK signal of the shift-register is used to clock the data in through the DATA signal. The strobe signal is used to prevent flashing the LEDs while data is shifted in. The shift register connected to the FPGA has tied this pin, because the data will not be changed often enough that the flashing can be detected. The situation is different for the other registers because the microcontroller will fade some of the LEDs in the front panel by rapidly changing the values. LED Connectors This block is identical to the "LEDs"-block, except that jumpers are used instead of LEDs. This is because the LEDs will be mounted in the front panel of the box and wired to the jumpers. These LEDs will be retained in the production version. 4 Switches By using a quadruple switch, the number of components on the board is reduced. This block also contains pull-up resistors to ensure that the voltage level is always well defined. Testpod Our test strategy relies on heavy use of the HP digital logic analyser. All important TTL signals are connected to one of the seven testpods on the board. Thereby, it is possible to monitor and analyse all intercomponent activity. The mass production version will not contain testpods. The testpod consists of 20 pins, of which two are unconnected. Furthermore, one pin is connected to ground and one to the relevant clock signal if any. We have divided logically the remaining 16 pins into two 8 bit buses for easy connections, since many of the signals to be measured have this size. 3.2.4 Design choices In this section some of the PCB design choices are described. Placement • Rotation The components are for the most part rotated the same way, thereby reducing the probability of error during mounting. Also, it is easier to comprehend how the board is designed and make changes at a later stage. This principle has only been broken when the routing was made simpler by doing so. • Fiducials Fiducial marks have been placed in two opposite corners. The purpose of this is to allow the placement of the board to be optically determined if the card were to be mounted by a machine. However, during the manual mounting of the prototype boards these were not used. 3.3. FPGA - microcontroller interaction 29 • Spacing The footprints were adequately spaced to account for components that are physically larger than their footprints. • Decoupling capacitors The general principle of one 100nF capacitor for each power pin has been employed. The capacitors were placed as close to their respective pins as possible to achieve the best effect. This strategy has also been controlled against application notes from the manufacturers of the respective components. Components • Optocouplers At one stage of the project, we included optocouplers in our design to separate the serial ports galvanically from the rest of the board. However, it turned out that this would require extensive changes to the design because the power supply to the Maxim chip would also have to be galvanically separated if the protection was to have any effect. Since this extra protection was not considered absolutely necessary, it was abandoned. We also considered separating the ethernet connection. Since this signal is analog, we could not use optocouplers. The trafo was also believed to provide the necessary protection. • Switches To save pins, we considered using a different approach for the switches. With the current design, one pin is connected to each switch. One alternative would be to use a mux, which would require ceil(log2(n))+1 pins for n switches. Another would be to use a shift register with parallel load, which would require 3 pins for any number of switches. However, we had enough pins on the devices, and we did not need many switches. Therefore, we saw no point in adding the extra complexity in hardware and software introduced by these alternative methods. • Battery In the finished product we would have included a battery as a backup power source. In the case of power failure, the box should be able to send a SMS before ceasing operation. Since this is only a prototype, the battery was not included in the design. • FPGA IO-pins We tried to assign the IO pins of the FPGA in a way that would make the PCB routing the easiest. This primarily implied choosing pins that were physically close to the destination, and sorting the pins so that the traces did not have to cross each other. 3.3 FPGA - microcontroller interaction 3.3.1 Division of labor The easiest way to implement a system such as this would have been to connect the network controllers directly to the processor bus. However, this would cause the microcontroller to be a potential bottleneck the entire system. Reading a byte from one of the controllers would take about 4 cycles, as would storing it into memory. The controllers do not support random access, so the packet would have to copied into memory first, and then 30 System design copied out to the other network controller. We were concerned that this would be too slow, considering the relatively low speed of the AVR. An intermediate solution would be to build an ISA bus of sorts, and use an ordinary DMA controller to perform the copying. By giving each module a separate connection, we hoped to be able to use the modules in parallel as much as possible. 3.3.2 Connection protocol The FPGA could have been connected directly to the memory/data bus, but this would have required addressing decoding logic (for the RAM chip), as well as further limiting the available RAM space. An 8-bit bidirectional bus is used between the µC and FPGA, with an additional bit for framing. 3.4 FPGA Design FPGA modular design overview The figure 3.10 (page 30) gives an overview of the different modules in the FPGA design, its interconnections and connections with the rest of the design. Figure 3.10: Block Diagram The microcontroller controls the FPGA through the I/O module. For communication between the internal modules, a sort of register bank, accessible for all modules, was considered. This was soon abandoned due to the growing complexity as the number of necessary registers for the Ethernet modules increased. We opted for a more scalable solution, an internal system bus. The bus solution also required an address decoder unit, selecting the appropriate unit for bus access. The bus is symbolized by the gray arrows in the figure. I/O Module The IOM receives commands from the microcontroller through the 8-bit control channel. An additional pin, called ATTENTION, is used for synchronization. 3.4. FPGA Design 31 On the rising edge of ATTENTION, the value on the control channel is latched in an address register. (Illustrated in figure 3.11, page 31). The top bit selects Read or Write mode (0=read, 1=write). For a write command, the data is sampled on the falling edge of ATTENTION, and a single write cycle is performed on the internal data bus. For a read command, the internal READ signal is asserted and held for as long as ATTENTION is high. The control channel is then driven to the value on the internal data bus. Figure 3.11: I/O Module illustration Address Decoder The Address decoder is connected to the internal modules that are addressable as shown in the register list. It analyzes the address on the internal address bus and enables the corresponding module so that it will be able to read/write data on the internal data bus. The registers that are available on the BBUS are listed in table 3.2 (page 31). Register Name E1xxx E2xxx DLEDx DTEST Range 00-0f 10-1f 20-21 22 Description WAN Ethernet Controller LAN Ethernet Controller Debug LEDs Test Register Table 3.2: Register list RAM Arbiter Several modules need to access the RAM. The RAM Arbiter is a simple module used to avoid collisions: Each module may set a REQ line, signaling that it intends to use the RAM bus. The arbiter will give the winning module a GRANT signal beginning the next clock cycle, which will remain in effect until the requesting module releases the REQ signal. Ethernet Control Modules There are two identical ethernet control modules, one for each ethernet port. Each ECM consists of these parts: • Input/Output buffers and pads. These are used by the packet blitter, and are overridable by setting bits in the ExCR. This is done during initialization to communicate directly with the CS8900. • A main state machine. This will consist of two main paths, one for sending and one for receiving packets. Each path consists of a number of states setting various control registers of the NIC, and will then activate the blitter unit at the appropriate time. 32 System design Register Name ExDCAL No. 0 Dir. R/W ExDCAH ExDCD 1 2 R/W R/W ExCR ExSR ExRPAR 3 5 6 W R W ExSPAR 7 W ExSPLR 8-9 W ExRPLR A-B R Description Ethernet Direct Control Address - used by the microcontroller to communicate directly with the Ethernet controllers during initialization High byte Ethernet Direct Control Data - used by the microcontroller to communicate directly with the Ethernet controllers initalization ECMx Control Register ETH Status Register ECMx Receive Packet Address Register - specifies in which memory buffer should store the next incoming packet (high 8 bits of the memory address). When this register is written, the ESPR bit in ExSR is cleared. ECMx Send Packet Address Register - specifies in which memory buffer a packet to be sent is found. ECMx Send Packet Length Register/Counter - this register contains the length of the packet to be sent ECMx Receive Packet Length Register - this register contains the length of the packet just received. Table 3.3: Ethernet Controller Module Registers Bit Name ECRA No. 0 ECSP 1 EDCWE 2 EDCRE 3 ECIOS 4 E_AEN E_VCC E_RESET 5 6 7 Description Receive Active - when enabled, the ECM will poll the NIC status register for incoming packets. If one is received, it will be copied into the buffer specified in ExPAR. Send Packet - after this bit is enabled, the ECM will begin transferring the packet pointed to by ExSPAR as soon as possible. Direct Control Write Enable - while this bit is set, the Data and Address outputs of the ECM are driven to the values in the EDCA/EDCD registers Direct Control Read Enable - while this bit is set, the Address output of the ECM is driven to the value in the EDCA register. The Data bus is tri-stated, and is readable as the EDCD register after a short delay. IO Select - this bit selects whether the direct access initiated by the EDCWE/EDCRE bits will be to IO space or memory space. Set to zero for normal operation (if set to one, signals that the bus is in use) Must be set to one for normal operation. RESET - active-high reset pin Table 3.4: Ethernet Controller Module Control Register Bit List Bit Name ESPR No. 0 ESPS 1 Description Packet Received - This bit is set when a packet has been received and placed in the shared RAM. It is automatically cleared when the ExRPAR register is changed. Packet Sent - This bit is set when a packet has been successfully transferred to the network controller (not necessarily to the LAN). Table 3.5: Ethernet Controller Module Status Register Bit List 3.5. Microcontroller design 33 • The blitter: This is a conceptually simple unit which will perform a block transfer from the CS8900’s RAM to shared RAM, or vice versa. Debug LED Register This module is a simple 12-bit parallell-to-serial converter. It is connected to a HEF4894BP - an external combined shift register and LED driver IC. The register is divided into two 6-bit rows, according to the layout on the card, thus the 6 LSBs of each separate address are used. IRQ Module This very simple module allows other modules to set flags indicating that they need attention. If any module requests attention, the external IRQ line to the AVR is asserted. In effect, this is an elaborate OR gate. 3.5 Microcontroller design The following tasks are handled by the software running on the microcontroller: Home Control System The BBox is able to send and receive SMS messages and X10 commands from/to devices in the house, and mail notification from an internet provider. Depending on rules specified by the user, the BBox will take action when a certain message is received, or a timer event occurs. The Home Control System deals will all of this. Separate software modules take care of the actual communication with the cell phone and X10 transceiver to enable the HCS to send and receive SMS messages and X10 commands. Web Interface The web interface allows the user to configure the various options of the box and sending of X10 commands. IPNAT routing While the FPGA handles the ethernet controller communication, the microcontroller implements the actual routing of the IP packets. The microcontroller will control the FPGA, which in turn interrupts the microcontroller when an ethernet packet has been received or transmitted. Having to deal with different tasks means that the microcontroller software will have to support some kind of multitasking. Also, in order to provide a web interface and DHCP server, it will have to provide an IP stack with the relevant protocols supported. To synchronize the various tasks being performed, the software should also contain some kind of event dispatching mechanism. Fortunately, simple operating systems implement these often used features. Several such operating systems were reviewed in the design phase of the project. We ended up choosing Nut/OS [15] from the Ethernut Project. The following figure shows the different software modules, as implemented in the microcontroller: Microcontroller Dual port SRAM Nut/OS 34 X10 Transceiver Mobile Phone UART UART X10 Interface SMS Interface Nut/OS Heap Figure 3.12: Microcontroller design overview HCS Interface/Control FPGA IP NAT router System time Nut/OS IP stack WAN Controller www interface TimeKeeper dhcp LAN Controller System design 3.5. Microcontroller design 35 3.5.1 Nut/OS Introduction Nut/OS is an open source software and hardware project for implementing embedded ethernet applications. The project site offers extensive documentation and example applications. Among the useful features of Nut/OS are: • simple non-preemptive multithreading • events and timers • dynamic heap memory management • Nut/Net, a TCP/IP-stack with all base protocols implemented. (And in addition a DHCP client, DNS resolver and an HTTP server.) • formatted printing through buffered devices Nut/OS supports the ATmega103 and ATmega128 microcontrollers. The above features make it ideal for use in our project. Other IP stacks and operating systems were considered, but none as flexible and well documented as Nut/OS. Some Nut/OS concepts: Threads Threads are implemented by using the Nut/OS THREAD macro. A thread is never expected to return. Unless an interrupt is received, a running thread will not be blocked unless it calls specific blocking Nut/OS functions. The thread can call NutThreadYield() if it explicitly wants to yield control to another thread, or NutThreadSleep() if wants to suspend its execution for some specified time. NutThreadCreate() is used to start at new thread. One must specify a stack size and priority for the thread. NutThreadSetPriority() can be called later on to set the thread priority of a thread. Events A Nut/OS event queue is represented by a HANDLE struct. A thread wanting to signal an event can call NutEventPost() or NutEventPostAsync() with the handle as the parameter. The latter function will allow the signaling thread to continue execution. When a thread wants to wait for a specific event, it can call the function NutEventWait() with the event handle, and optionally a timeout value. The thread will be blocked until the event is signaled or the timeout expires. Devices The Nut/OS uses a NETDEVICE struct to represent a device. All external devices, and some virtual devices like sockets, are accessed through their NUTDEVICE structs. To use a device, the code will have to use the NutRegisterDevice() function to register the device as being used. If needed, a device type specific function is called to initialize the device. In this project we have made use of the following devices: 36 System design UART devices: devUart0 and devUart1 These devices represent the UART devices on the ATmega128. On the ATmega103 there is only one UART available as devUart0. The UART devices provide an abstraction to the UART devices, handling I/O buffering. Network devices We have made two ethernet devices available to Nut/OS, devEth1 and devEth2. Nut/OS already have a devEth0 device for their Realtek ethernet driver. SOSTREAM devices These devices are virtual devices representing an I/O stream. They are mostly used when sending network data, but can also be used when accessing other communication devices. Formatted Printing Functions Nut/OS provides several functions for writing formatted output to devices, including NutPrintFormat(), a variant of the common printf, NutPrintString, and NutPrintBinary. Nut/Net Nut/Net is built on top of Nut/OS and contains the network specific part of the Ethernut Project. Nut/Net implements a full IP stack. It has an IP routing table and an ARP table, and supports all basic IP protocols as described above. To set up networking, one have to call the NutNetIfConfig() function and supply the appropriate ethernet device as a parameter. Nut/Net handles all communication with the ethernet driver. In addition to the basic protocols, it supports a DHCP client. To use this, one simply has to call the NutNetAutoConfig() instead of NutNetIfConfig(). Last, but not least, Nut/Net implements a simple HTTP web server. HTML documents can be stored in a small file system, which is created with a utility that converts regular files to C source files that can be included in the code. The HTTP server also supports "cgi scripts". By using the NutRegisterCgi() function, one can associate a specific function with a filename in the web server. When the URL is accessed, the function is called with en SOSTREAM argument representing the established connection. NETBUFs The Nut/Net NETBUF struct is used for handling all network data on its way through the IP stack. There are pointers to separate buffers (in NBDATA structs) for use in the data, network, transport and application link layer. These are allocated on demand by the Nut/Net code. 3.5.2 Home Control System (HCS) The microcontroller communicates with the X10 interface and the cell phone. 3.5. Microcontroller design 37 The HCS module is responsible for carrying out the tasks as described by commands received via the Web Interface, X10 Control Devices, by SMS from the GSM phone and from a mail alert system. It maintains a list of X10 devices containing device type, device and house code, a nick name and the current state. It also maintains a list of rules to be applied when an SMS message or X10 message is received, or when a mail alert packet is received. The rules specify the action to be performed when a certain event occurs. X10 events are identified by a device/house code and a function. SMS events are uniquely identified by a phone number and a text string. In addition, the HCS module maintains a list of allowed phone numbers. If an SMS event has no associated phone number, the list of allowed phone numbers is used to determine if the event should be allowed to be executed. A timer thread is woken up by Nut/OS once a minute, and will check whether a certain event is scheduled to run. Timed events can be scheduled once or repeated each hour, weekday or week. X10 commands are queued in a separate queue before they are sent to the X10 controller. Separate threads handle incoming and outgoing X10 messages independent of the rest of the HCS module. This way, the HCS system will be free to attend to other matters as the X10 commands are being sent. SMS messages are handled in a similar fashion, except only one thread handles both incoming and outgoing messages. Whereas an X10 message can arrive at any time, the cell phone is manually polled for new messages. 3.5.3 Web Interface The following has not yet been implemented due to lack of time. The web interface is implemented using the Nut/OS HTTP interface. Depending on whether the web interface is accessed from the local network or the internet, the BBox should grant access to different kinds of operations. From the internet, the user should only be able to control devices in the house, and only after having been authenticated. From the LAN, the user should be able to do the same without authentication. However, to configure the BBox, authentication should be required. In the prototype version, only normal HTTP authentication is performed, as this is natively supported by Nut/OS. Ideally an SSL enabled web server should have been implemented, but this is beyond the scope of this project. The web interface provides the user with the following configuration options: • Set time and date. • Set up static NAT routes. • Set WAN IP address, or enable DHCP client. • Set LAN IP address. • Enable/disable DHCP server. • Set the cell phone number. In addition, the following options can be configured for the HCS module: • List of X10 devices present in the house, including type of device and a nick name. • Phone numbers that are allowed to send SMS messages to the BBox. 38 System design • Events. The events can be triggered by a specific X10 command, a specific SMS message or a timer, which can be set to go once (on a specific date/time) or repeatedly. The actions of an event can be to send a specified X10 command or an SMS message. Events can be added and removed, but not edited. On a separate web page, the user is able to view the status of, and control the various X10 devices. In addition, any events specified in the configuration can be called. Using the built-in Nut/Net authentication mechanism, the configuration web page and the Home Control web page are placed in separate directories, each having different levels of security. All dynamic web pages are implemented as functions and registered with the Nut/Net HTTP server. 3.5.4 Mail alert One of the requirements of the BBox is the ability to alert the user when new mail has arrived in his/her mailbox. This is implemented by having the user run a procmail 1 script that simply access a specified web page on the BBox. The mail alert LED will then be turned on. The user can turn the LED off by pressing the mail acknowledge button. The LED will then be turned off. This feature is not implemented. 3.5.5 IPNAT Routing The IP Network Address Translation Routing Module has the responsibility of communicating with the network controllers through the FPGA. It manages a routing table that is updated whenever a connection is created, destroyed, times out, or when the user adds or removes a route through the Web Interface. When a packet is received through one of the network interfaces or the Nut/Net system requests a packet to be sent, the IPNAT Routing Module will notify a high priority thread, which will handle the packet. If a received packet has a local destination, the thread will allocate a Nut/Net NETBUF struct and call the appropriate Nut/Net function. Else, it rewrites it and arrange for it to be resent, and updates the NAT table as described in the Packet Trace section. If the packet is a SYN or FIN message, the NAT table entry either be created, deleted or its state updated, depending on the previous state of the NAT table. If the ethernet destination address is not available, the packet will be queued until an ARP request has returned an ethernet address, or the packet has timed out. A separate thread periodically traverses the NAT routing table and removes any timed out entries. This thread is also responsible for doing ARP requests from Nut/Net 3.5.6 Timekeeper Real Time Clock (RTC) The Timekeeper stores the date and time in BCD (Binary Coded Decimal) format. It is accessed through the same memory bus as the dual port SRAM. The SRAM is therefore deactivated when accessing the Timekeeper. Prior to reading and writing the RTC, a control register can be written to. The RTC will then stop updating the memory to allow it to be read safely, or read back the values stored when the write bit is reset. When the Timekeeper module is shipped from factory, the oscillator is stopped in order to preserve battery life. To enable the oscillator, a stop bit in the control register must be reset. The Timekeeper only contains a two-digit year. To be Y2.1K compliant, the BBox would have to store additional digits in EEPROM. Due to additional time constraints, we choose not to implement the Y2.1K 1 A free software program that can process delivered mail, compatible with many mail servers. 3.6. SMS Communication 39 feature. The consumer will in any case be forced to upgrade the Timekeeper due to its life expectancy of 10 years. This will yield an opportunity to solve the Y3K problem before it materializes. This feature is not implemented. 3.6 SMS Communication 3.6.1 Description The BBox should be able to alert the user via SMS when a critical event occurs. Examples of critical events are: • Power loss • Break-in, fire (and other alerts) detected by the Home Control System (HCS) It should also be able to receive SMS commands for some of the HCS functions. These commands will be received and parsed by the microcontroller (via the cell phone) and placed in the HCS command queue. Examples of HCS functions: • Turning on/off lamps. • Activating the alarm. • Turning on/off the heating. To implement this functionality, an SMS thread is run in the microcontroller. This threads does two things: • Check for incoming messages. • Send outgoing messages. Conseptual model of the SMS thread shown in figure 3.13 (page 40). 3.6.2 Communicating with the cell phone The phone is connected to one of the serial ports in the BBox, and communication is done using Siemens specific AT commands [13]. This require the DTR (Data Terminal Ready) pin to be high (12v), since the data cable used with the phone needs power to be activated. In the original schematics the DTR pin was not connected, but this was later done manually by soldering a wire between the DTR pin and pin 2 of the MAX202CP. A better solution would be to connect the phone on the inside of the BBox, but because of lack of space and the danger of the phone interfering with the electronics in the box, we have decided to put it on the outside even though it was supposed to be on the inside. If the box were designed to be mass produced, the phone would have been placed on the inside, or else it would have destroyed the impression of the box as one product, and not a box and a phone. Connection specification: • Baudrate: 19200 bps 40 System design Figure 3.13: SMS thread model 3.6. SMS Communication 41 • Data bits: 8 • Parity: none • Stop bits: 1 • Handshaking: none 3.6.3 AT commands The needed AT commands are found in table 3.6 (page 41). Command for sending an SMS: Response (success) Response (failed) Command for reading SMS: Response (success): Response (failed): Command for deleting an SMS: AT+CMGS=<length><CR><pdu><ctrl+Z/ESC> +CMGS: <mr> +CMS ERROR: <err> AT+CMGR=<index> +CMGR: <status>,[<alpha>], <length><CR><LF><pdu> +CMS ERROR <error message> AT+CMGD=<index> Table 3.6: Siemens AT commands To retrieve the messages sent to the phone we issue the AT+CMGR command: AT+CMGR=<index> where <index> is the memory index where the message is stored. We issue the command AT+CMGR=1 to retrieve the first message from the phone. This results in the following response from the phone: +CMGR: 0,,25 06917409001200040A91740910368400002001115131920007D4F29C9E769F01 OK where 0 is the message status and 25 is the PDU length. 06917409001200040A91740910368400002001115131920007D4F29C9E769F01 is the PDU containing all of the message information. This hex string can be parsed to retrieve what we need, that is; the message text and the senders phone number. The phone number is used to verify that the message is coming from an authorized user. If the user is authorized OK, the message is parsed and compared to all valid commands. If a match is found, the command is executed and a confirmation is sent to the user. If the user sent an invalid command, the BBox responds with an error message. If the message is coming from an unauthorized user the message is deleted without any notification to the sender. This is to prevent spending money on error messages to unauthorized users. After a message is read, it is deleted by issuing the command AT+CMGD=1 This deletes the message at memory index 1. We assume that the message memory initially is empty, and an incoming message will therefor be placed at index 1. To maintain this assumption over time, we also assume 42 System design that we are able to delete all incoming messages quickly enough to clear index 1 before a new message arrives. If we are not able to clear the memory quickly enough, the next message will be placed at index 2. This means it is lost, since we only read messages that are placed at index 1. When we then are able to delete the message at index 1, the next incoming message will be stored at index 1. The worst case scenario is that 11 messages is neglected (12, which is standard memory size, minus the one at index 1). After that, the network will delay all incoming messages until there is room in the phones message memory. 3.6.4 The PDU message format The text messages are sent to/received from the phone in PDU format, which includes information regarding service senter, transmitter and receiver address, the message itself, timestamp etc. We need not take advantage of all the features of the PDU format, and therefor use the default values when we generate and send messages. The received PDU includes what is given in table 3.7 (page 42). 06 91 7409001200 04 0A 91 7409103684 00 00 20011151319200 07 D4F29C9E769F01 Length of the SMSC information (octets of phone number and addresstype) Type-of-address of the SMSC. (91 means international format of the phone number) Service center number (in decimal semi-octets format. This means that the numbers are switched two by two; 123456 -> 214365). If the length of the phone number is odd, it is padded with a trailing F to make it even (12345 -> 12345F -> 2143F5). First octet of the SMS-DELIVER message. We use the default value, which means: "Reply path exists, No header in data field, No status report requested, No more messages to send, This is an SMS-DELIVER PDU" Address-Length. Length of the sender number (0A hex = 10 dec) Type-of-address of the sender number Sender number (decimal semi-octets). Same rule of conversien applies as with the SMSC number. Protocol identifier. (00 -> standard SMS) Data coding scheme used. (7 bit standard alphabet, ordinary message) Time stamp (semi-octets). (20011151319200 -> 021011 151329 00 -> YYMMDD HHMMSS ZZ). This message was sent October 11th, 2002, 15:13:29, and the time zone difference is 0 hours. User data length, length of message. The data conding scheme field indicated 7-bit data, so the length here is the number of septets. Data field. Message "heisann" , 8-bit octets representing 7-bit data. Table 3.7: Received PDU format The PDU to be sent includes what is given in table 3.8 (page 43). The PDU will be parsed (or built) in the AVR after receiving (or before sending) the message. The messages are sent using a 7 bit alphabet, instead of the standard 8 bit. Because of this, we need to implement translation from 8 to 7 bit and reverse. The translation is done by concatenating all the 7 bit characters in the message, cutting pieces of 8 bits and sending these as normal 8 bit characters. When the message is received the 8 bit characters are concatenated and cut into 7 bit pieces, which is the original message. This way the format saves one bit for each character in the message, and gives 160 available characters, instead of 140 using a 8 bit format. Example translation in table 3.9 (page 43). 3.6. SMS Communication 00 11 00 0A 91 7409103684 00 00 AA 07 C862721A743A01 43 Length of SMSC information. Here the length is 0, which means that the SMSC stored in the phone should be used. First octet of the SMS-SUBMIT message. (11 means "No reply path, No header in user data, No status report requested, Relative format, No rejection of duplicates, This is an SMS-SUBMIT message".) Message reference. The "00" value here lets the phone set the message reference number itself. Address length. Length of receivers phone number. (0A hex -> 10 dec). Type of address. (91 indicates international format of the phone number). The phone number in semi octets (Translation as above). If the number length is odd, a trailing F is added before translation. Protocol identifier. (00 means standard SMS). Data coding scheme. (00 means standard SMS.) Setting this value to 10 lets us send SMS alerts that pop up on the receivers screen without the user having to open the message from the inbox. (Doesn’t work on old phones). Validity period. (AA means 4 days). User data length. (Length of message). The data coding field indicated 7-bit data, so the length here is the number of septets to be sent. User data. These octets represent the message "HEISANN". Table 3.8: Transmitted PDU format 7 bit char 6543210 6543210 6543210 6543210 6543210 6543210 6543210 6543210 8 bit char 06543210 10654321 21065432 32106543 43210654 54321065 65432106 saved byte Table 3.9: 7 to 8 bit translation 44 System design 3.7 Packet trace The journey of an IP packet through the BBox • The ethernet frame is buffered in the internal buffer of one of the network controllers, and the FPGA is notified. • The FPGA transfers the packet into shared memory and signals the microcontroller. • The microcontroller looks at the packet header and decides what to do. • If the packet is a SYN packet and the connection is accepted by the rule set (to be specified), an entry is made in the NAT table 2 and the packet is forwarded (see below). • If the packet is a FIN packet, the NAT table will be updated according to a simple state machine. Depending on whether it is the first FIN packet in the connection, the NAT table entry is either updated or removed, and the packet is forwarded. • If the packet is addressed to a local port (on the BBox), we pass it on to the Nut/OS IP stack. • If the packet still has no entry in the NAT table, the packet is discarded. • The IP and ethernet headers are patched according to the NAT table, and the connection timeout value in the NAT table entry is updated. • The FPGA transmits the ethernet packet to the controller on the opposite side 3 , and the controller transmits the packet on to the network. Elaboration on the handling of individual packets: • The source address is set to the BBox’s IP address on the particular net for which the packet is heading. In the case of incoming traffic, the destination address is looked up in the NAT table. • If the packet belongs to a protocol that requires special attention, e.g. FTP, IRC DCC or AUTH, the FPGA will already have written information into shared memory. The exact extent of this as of yet undecided, but it might be as simple as having the FPGA provide a list of offsets to "interesting" strings within the packet, to avoid having the microcontroller do string matching, as the memory access of the microcontroller is comparatively much slower than the FPGAs. This preprocessing would be done in parallel with the initial copying of the packet. • There appears to be some uncertainty as to whether or not IP packets embedded in ICMP "invalid packet" payload fields should be patched. We choose to ignore them, since we probably broke the packet in the first place. 3.8 Home Control System (HCS - X10) The BBox should be able to interface with electrical devices in the house, enabling the user to control devices in the house through a web interface or by sending SMS messages. It should also be able to receive input from devices like door sensors or fire detectors. 2 If the IP address is unknown and on the LAN, we might have to use ARP to locate the MAC address of the host. This will, however, happen very rarely, as most connections are outbound. The internal DHCP server’s constant ARP probing should have discovered the host already. We can probably drop the packet safely, and thus avoid having to maintain a queue of delayed packets. 3 Or the same side, in case of ping packets et al. 3.8. Home Control System (HCS - X10) 45 X10 is a popular system for home control automation. Several manufacturers make X10 controllers and sensors, including dimmers, switches, motion detectors and light sensors. The X10 protocol is widely used, reasonable inexpensive, and well documented. It is therefore ideally suited for this project. As the interface between the BBox and X10 devices we have chosen the Marmitek CM11G transceiver. It can transmit and receive X10 commands through an RS232 interface. It also contains a microcontroller with a timer facility to send X10 commands. Since the BBox already contains a real time clock, we have decided to implement the timer feature in software. The transmission medium used in X10 is the regular mains supply. Alternatively, some devices support wireless communication through RF signals. Up to 256 devices can be addressed, using an addressing scheme of 16 house codes ("A" to "P") and 16 device codes (1-16). Several devices can share (and respond to) a single house and device code. Each X10 message is transmitted two times, and each bit sent is followed by its complement bit. This is the only fault tolerance built into the system, as there is no feedback from the receiving X10 devices. The bits are transmitted on the zero-crossing of the alternating current. This does not provide an impressive data rate, but it is sufficient for the kind of communication done by X10 devices (switching devices on/off, dimming lights, etc). An X11 message can either be an address message or a function message. For each X10 command sent, there will be one or more address messages (always within the same house code) and one last function message. There are 16 unique function codes defined. The most frequently ones used are the on, off, dim, bright, all units off and all lights on/off commands. The CM11 transceiver communicates with the BBox at 4800 bps with 8 bits, 1 stop bit and no parity. When sending an X10 message, a header byte and an address/function byte is transmitted from the BBox. The transceiver then responds with a checksum byte, after which it expects a reply confirming or cancelling the message. The message is then ’transmitted on to the mains supply, and an acknowledgement byte is sent. The header byte has the format described in table 3.10 (page 45). 7 d1 6 d2 5 d3 4 d4 3 d5 2 1 1 fa 0 e Table 3.10: Header format d1-d5 is the value (ranging from 0-22) in the case of a dim/bright command, while fa is 1 for a function message or 0 for an address message, and e is 1 in an extended message. The address/function byte has the format described in table 3.11 (page 45). 7 h1 6 h2 5 h3 4 h4 3 f1 2 f2 1 f3 0 f4 Table 3.11: Address/function byte h1-h4 represent the house code and f1-f4 represent the function code or device code, depending on the type of message. The house code and device code is shown in table 3.12 (page 46). The mapping between function code and binary value is shown in table 3.13 (page 46). When the transceiver experiences a power failure, it will need to be updated with the correct date, time and default house code. It will send the byte 0xa5 every second to alert the BBox until the BBox has replied with a proper response. 46 System design Housecode A B C D E F G H I J K L M N O P Device Code 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 Binary Value 0110 1110 0010 1010 0001 1001 0101 1101 0111 1111 0011 1011 0000 1000 0100 1100 Table 3.12: House and device codes Function All Units Off All Lights On On Off Dim Bright All Lights Off Extended Code Hail Request Hail Acknowledge Pre-set Dim (1) Pre-set Dim (2) Extended Data Transfer Status On Status Off Status Request Binary Value 0000 0001 0010 0011 0100 0101 0110 0111 1000 1001 1010 1011 1100 1101 1110 1111 Table 3.13: Function to binary mapping 3.9. Box 47 Likewise, when the transceiver received an X10 message from another X10 device, it will store it in a 10 byte large buffer and assert the RS232 "RING" signal in addition to sending the byte 0x5a every second. The BBox can then receive the buffer by sending an acknowledgement. The transceiver buffer is then emptied. If more than 10 X10 messages are buffered, any new messages will simply be discarded. The X10 communication software is implemented using two Nut/OS threads, X10ReceiveThread and X10TransmitThread. The receiving thread continuously polls the Nut/OS uart device. • If more than three 0xa5 polling bytes are received in sequence, the x10_settime() function is called, which in turn sets the date and default house code to a default value, as described in the CM11 hardware documentation (the date could have been set to the system time, but as discussed above, the timing feature of the transceiver is not used). • If more than three 0x5a polling bytes are received in sequence, the acknowledgement byte (0xc3) is sent to the transceived, and the returned data parsed. The x10_receive() function in the HCS Module is called with the address, function code and value as arguments. For each function message in the buffer, only the preceding address message is considered. This is done both to ease implementation of the HCS Module, and because no known X10 devices (except computer controlled ones) support sending of more than one address message per X10 command. • If the byte is not recognized as either of these, it is assumed to be part of a communication between the transceiver and the X10TransmitThread thread. Thus the X10TransmitThread is notified by means of the x10_rcvd event handler, by using the NutEventPost() function. When the HCS Module wishes to transmit an X10 command, it calls the function x10_enqueue() with the address, function code and value of the command. This function allocates an x10command struct inserts it into a linked list, and then notifies the X10TransmitThread through the x10_queue event handle. By having the X10 communication code maintain its own queue, the HCS Module will be able to send several X10 commands "at once" and afterwards immediately be able to attend to other matters. The X10TransmitThread will wait for queued events (by calling the NutEventWait() function on the x10_queue handle). Whenever it is notified of a queued message, it will try to transmit the first message in the queue. After assembling the header and address/function bytes, these bytes are transmitted by calling the x10_send_message() function. This function tries to send the bytes, wait for a checksum by waiting for an x10_rcvd event, send an acknowledgement, and wait for a return acknowledgement. Finally, the x10command struct is removed from the queue, and any remaining queued commands are handled. 3.9 Box 3.9.1 Overview 3.9.2 Design sketches The front of the box contains a mail LED, a MAIL RESET button, plexiglas logo and a loadmeter. The mail LED is switched on when mail arrives and is reset when the MAIL RESET button is pressed. The loadmeter shows the load when there is network traffic through the Bbox. Front panel is sketched in figure 3.14 (page 48). The back panel contains two network interfaces. One is connected to the Internet Service Provider (ISP), and the other is connected to the users computer (or a hub if multiple users are to connect to the internet). Three LEDs show link and activity for each of the two interfaces. A power connector is mounted in the middle of 48 System design Figure 3.14: Front panel the back panel, and two male DSUB connectors are connected at the right. The DSUBs are used to connect the cell phone and the HCS interface. Back panel is sketched in figure 3.15 (page 48). Figure 3.15: Back panel 3.9.3 Dimensions and Drill Schematics The drill schematics for the front- and backpanel of the box are displayed in figure 3.16 (page 48). The sketches are very intuitive and require no further explanation. Figure 3.16: Dimensions. Backpanel (Top) - Frontpanel (Bottom) Comments on dimensions: • The backpanel require drill holes for two DSUB9 serial-connector (A), a power connector (B) and 3.9. Box 49 RJ45 Ethernet connector (C) and six LANLEDs. • The frontpanel require drill holes for the plexiglaslogo, a button and six LEDs. • The frontpanel-button fits a 13,0 mm drill hole. • All the LEDs require 3,0 mm drill holes, and the distance between the center of each LED is 4,0 mm. 3.9.4 Plexiglas logo In front of the box there is a logo made from a piece of plexiglas that we got as a product sample. The BBox logo was then engraved from the back of the plate to make a nice and clean visual appearance. The short ends sides of the plate contains three blue LEDs each. When these are lit, the logo appaear as a blue floating 3D figure in the clear plexiglas. Because the plate is clear elsewhere, it is possible to view the circuit board inside the box. This is (for the time being) a very popular feature in modern electronics designs. Picture of the logo is shown in figure 3.17 (page 49). Figure 3.17: Plexiglas logo 50 System design Chapter 4 Testing 51 52 Testing 4.1. PCB test 53 4.1 PCB test The printed circuit board testplan provides a logical order for conducting tests on the PCB. The testplan was finished in advance, except the status-attribute which is used to indicate progression and refers to comments. The first two tests were constantly checked during the whole development phase, but test 3 and 4 were executed only once when the board returned from production. Test 5 was executed to check the power planes, while two other boards were at Alphatron. The hand-soldering of the two prototype boards started in test 7 and continued through 13. The soldering of the components was executed in the most reasonable way, to avoid unnecessary problems. The smallest or lowest components, usually surface mounted devices(SMD), were soldered at first, while the biggest or tallest components were soldered in the end. Furthermore, we completed one board before starting the other. Thus, the experience gained from the first board would gain us during the repetition, and the errors made could hopefully be avoided the second time. If we made an error so severe that permanent damage would be inflicted, at least we would not risk destroying both boards. PCB test plan listed in table 4.1 (page 54). (1) LEDs contains: One Philips LED Shift Register, 12 resistors and 12 LEDs. (2) LEDs2 contains: One Philips LED Shift Register, 12 resistors and 12 jumpers to be used for external LEDs. Comments on status: 1. An unplaced resistor was discovered after the PCB had been produced. Luckily, it was possible to implement it in the FPGA. See "Design Flaws". 2. The board seems alright after a little inspection, but errors are understandably very difficult to discover visually. 3. After the soldering of the Power block were finished, the voltages were checked. All powerjumpers showed an adequate accuracy, and the measured voltages were 5.11V for 5V plane and 3.55 V for the 3V6 plane. 4. Alphatron’s soldering was checked with a microscope and no errors were found. 5. We later found out that an additional pin on the dual port RAM had to be connected to the microcontroller. See "Design Flaws". 6. We later found out that the "Data Terminal Ready"-pin had to be set high. See "Design Flaws". 4.2 FPGA test 4.2.1 Unit Testing during Development The VHDL code modules contain their own test vectors embedded as comments between the entity and architecture sections. A small Perl-script (found in the appendix) extracts these and generates ActiveHDL scripts that run the simulator with the given parameters. A comment like "–>101010" next to a signal or input definition specifies that the signal is to be driven to the given value initially. Several lines of the form "–delta-time signal=value signal=value" define a wave form. 4.2.2 Modular Behavioral Simulation The different modules in the FPGA design are tested independently. A test bench will be written for each module in order to take care of sending stimuli and interpreting outputs. For test plan, see table 4.2 (page 55). 54 Testing Test No. 1. Description Expected/Correct Result Status Check schematic diagrams for errors. OK 2. Check the PCB design. 3. Check the PCB visually for obvious errors. 4. Compare the routing to the pinlist. 5. Solder the components in the Power block. Check voltages. 6. Check Alphatron’s soldering. 7. Solder the components in the Power block. Check voltages. 8. OK All components connected. OK All components connected. OK 11. Solder the remaining components belonging to the MCU part of the PCB. Unplaced components include Decoupling Capacitors, TimeKeeper, Latch, MUX, JTAG, ISP, Crystal, 4xDIP switch, LEDs(1), LEDs2(2), Pressbutton and one Testpod. Solder the remaining components belonging to the FPGA part of the PCB. Unplaced components include Decoupling Capacitors, SPROM, JTAG MultiLINX, Clock, XChecker, Switch, LEDs(1), PressButton and two Testpods. Solder the remaining components belonging to the Ethernet Controller part of the PCB. Unplaced components include Decoupling Capacitors, Crystal, Isolation Transformer, RJ45 Connector, Resistors, other Capacitors, LANLED, LinkLED, BStatusLED and two Testpods. Solder the Dual Port RAM’s Decoupling Capacitors. All components are connected. Pins that require connection are connected. All components are routed. All the components are placed. Correct component placement and routing according to the Gerber files. All pins are connected as specified in the pinlist. The power-planes are connected to the correct voltage. 5V in the VDD5 and 3.6V in the VDD3V6 FPGA, MCU, Dual Port RAM and ethernet controllers are connected correctly. The power-planes are connected to the correct voltage. 5V in the VDD5 and 3,6V in the VDD3V6 All components connected. 12. Solder the remaining components in the Serial part. All Decoupling Capacitors connected correctly. All components connected correctly 13. Solder the remaining Testpods. All components connected correctly. OK, note 5 OK, note 6 OK 9. 10. Table 4.1: PCB test plan OK, note 1 OK, note 2 OK OK, note 3 OK, note 4 OK, note 3 4.2. FPGA test 55 No. 1 Module I/O Module 2 Internal bus, decoder 3 Debug Output The module is given a few register values. 4 Ethernet Control Module Direct Control Output Test: Test vectors are written to the EDCD/EDCA registers, and the EDCWE bit is set. Direct Control Input Test: A test vector is written to the EDCA register and on the external NIC data bus, and the EDCRE bit is set. Polling: The ECRA bit in ExCR is set. 5 6 7 8 Test Description Several commands are placed on the control port, and the response is noted. All defined commands are exercised. Test data is written to and read from the test register and other registers. Packet reception: The EFR bit (in the NICs status register) is set. RAM Arbiter The grant lines are asserted one by one and simultaneously. Expected Results The control signals and other inputs for the register bank should reflect the given command. Results OK The data read from the test register correspond to the data written, and should not be changed by writing to other registers. The data should appear at the output one bit at a time, LSB first, properly clocked (the data should be valid on the positive clock edge) The correct values should appear on the external NIC data and address bus. OK The data from the external NIC data bus should appear as the EDCD register. OK The ECM should begin polling the NIC status register. It should continue to do so until the Ethernet Frame Received bit is read as 1. At this point, the Packet In Transit bit should go high. The ECM should read the NIC registers containing the packet size, and enter a loop doing a NIC-tomemory copy. The packet length should show the correct values, and the RAM cycles should be valid. etc ad nauseam Only one request line should be high at any time. No grants should happen unrequested. Not Implemented Table 4.2: Module test OK OK Not Implemented OK 56 Testing 4.2.3 On-Board Testing These tests are performed by uploading a small test driver program to the microcontroller. The test driver allows us to read and write hex values from the various registers of the FPGA. See tabel 4.3 (page 56). No. 1 2 3 4 5 6 Module Internal bus, decoder, I/O module Debug Output Ethernet Control Module Test Description As test 2 above. Expected Results As above. This will implicitly show that the I/O Module is working. Results OK As test 3 above. The data should be visible on the internal debug LEDs. The status registers should show reasonable values. Once a cable is connected, the "link valid" flag should go high. Being in promiscuous mode, the NIC should accept any packets received from the Ethernet. Thus, the "packet received" flag (of the NIC) should go high at most a few seconds later. We should also be able to read this packet manually (though slowly) across the control connection. The packet should appear OK Direct Control test: We send various commands to the NIC Ethernet Initialization: A complete set of initialization vectors is sent to the NIC. The NIC is placed in promiscuous mode. Network test: A frame is sent by controlling the Ethernet chip directly Polling: The reception enable bit is enabled. 7 Packet Reception: As above. 8 Packet Transmission: A frame is placed in memory, and the ExSPAR and ExSPLRL are set accordingly. At the receiving end a packet sniffer (say, tcpdump) is run. After a little while, the Packet In Transit bit should go high. After a slightly longer while, the Packet Received bit should go high, and a packet should be readable from the shared RAM. After a while the Packet Sent bit should go high. The frame should appear in the packet trace at the receiving end. OK OK OK Not Implemented Not Implemented Not Implemented Table 4.3: On-board testing 4.3 Microcontroller test Microcontroller testing is devided into testing of sub components (table 4.4, page 58) and program modules (table 4.5 on page 59, table 4.6 on page 60, table 4.7 on page 61, table 4.8 on page 62 and table 4.9 on page 63). Simple tests are done on the BBox curcuit board, using pieces of code. Overall testing is done using all the 4.3. Microcontroller test 57 code combined together. To monitor the serial outputs from the BBox we use a terminal client. LEDs are also used for debugging. Some parts have not been tested, since not all of the system is implemented. These tests are labeld N.I. (Not Implemented). Note 1: Only successful in test code, not from within Nut/OS. Note 2: Not all of the features are implemented, and therefor their initialization will not work correctly. 58 Testing Test nr 1 Sub component General Test name Test description Expected results Results Flash programming the AVR The AVR is programmed using the SPI interface while mounted on the circuit board The AVR is programmed with at simple program that turns the LEDs on and off at an appropriate interval The reset button is pressed AVR Studio verifies successful programming OK 2 General LED test The LEDs flashes OK 3 General 4 Serial Port Reset function test Serial port test The AVR is reset and return to normal operation Data is written correctly to a connected terminal and be read correctly from the terminal (and echoed) The FPGA will respond according to defined behaviour Correct bitvalues (according to the datasheet) are output to the serial port OK 5 6 FPGA communication Timekeeper FPGA communication test Timekeeper test 7 SRAM SRAM test The AVR is able to read/write SRAM and confirm this to the serial port The AVR is able to read/write EEPROM and confirm this to the serial port. The AVR is able to run the Nut/OS UART example and communicate through both of the serial ports OK 8 General EEPROM Read/Write Test Verify that we are able to read and write from the AVR EEPROM. 9 Nut/OS Nut/OS UART test The AVR is programmed with the UART example code from the EtherNut package and the board is connected to a terminal with the appropriate baudrate 10 Nut/OS Nut/OS memory test The Nut/OS is able to address the external SRAM and report correct memory size, and allocate heap memory The Nut/OS / AVR is able to respond to an interrupt by writing ’Interrupt!" to the serial port OK 11 Nut/OS Nut/OS interrupt test flash Test that we are able to send and receive data on the serial ports Test that we are able to write to FPGA registers and read from registers Data from timekeeper will be read and written by the AVR and output to the serial port Verify that we are able to activate the SRAM and utilize it from the AVR Table 4.4: MCU test plan, part 1 OK OK N.I. OK OK N.I. 4.3. Microcontroller test 59 Test nr 12 Program module Nut/OS Test name 13 SMS subsystem Siemens C35 init test 14 SMS subsystem SMS test 15 SMS subsystem SMS receive test 16 X10 subsystem X10 init test 17 X10 subsystem X10 test 18 X10 subsystem X10 receive test Test description Nut/OS thread test send send We switch off the phone, connects it to the serial port of the AVR and triggers the SMS power up code from the STK500 dev. board The SMS send code is activated from the STK500 dev. board and an SMS is sent by the AVR We send an SMS from a private phone to the project phone, and wait for the text to be displayed in the terminal program connected to the AVR. We connect the CM11 interface to a serial port and the mains supply. We monitor the serial communication to ensure that the CM11 is programmed correctly We connect the already initialized CM11 interface to a serial port and trigger an X10 event from the AVR controller. A lamp is connected to the LM11 module that is also connected to the mains supply and and has been confirmed to work The SM11 X10 controller and the CM11 interface is connected to the mains supply. The AVR is programmed to write to the serial port when it receives a specific X10 message Expected results Results The Nut/OS is able to switch between two threads, one writing to a serial port, another flashing the LEDs. The phone is switched on (PIN code is disabled) OK The correct SMS is received at one of our private phones. OK The AVR parses the received SMS and writes the text and sender number to the serial port OK The AVR is able to initialize the CM11 interface with the current time and date OK (current date not used. Preset date used instead.) The AVR is able to send an X10 message to an arbitrary device and the device responds with the correct behaviour OK The AVR is able to receive an X10 message from an arbitrary control device and output the message to the serial port OK Table 4.5: MCU test plan, part 2 N.I. 60 Testing Test nr 19 Program module EtherNAT subsystem Test name Test description Expected results Results Ethernet controller communication test The AVR is able to write and read registers of both ethernet controllers through the FPGA, and correct value is displayed in the terminal OK 20 EtherNAT subsystem Ethernet init test The AVR is able to set up the ethernet controllers correctly according to the configuration. The AVR is able to receive notification of an incoming packet N.I. 21 EtherNAT subsystem Ethernet packet receive test EtherNAT subsystem Ethernet packet send test The AVR is interrupted by the FPGA. The AVR is able to program the FPGA to transfer a packet to memory, and is able to read the packet The AVR is able to program the FPGA to transfer a packet from memory to an ethernet controller. The ethernet controller is able to transmit the packet to the network OK (Note 1) 22 The FPGA is programmed to allow direct connection the ethernet controllers. Register are written to, and read afterwards. The AVR will output the register values to a serial port The FPGA is programmed to allow direct connection the ethernet controllers. The ethernet controllers are initialized to the correct operating mode as described in the CS8900A Data Sheet. An ethernet packet is sent to the specified ethernet address. Registers are read to confirm that the packet is received. The AVR outputs the register data to a serial port. The ethernet controllers are initialized, the ECM in the FPGA is activated and a packet is sent from an external ethernet device to the specified ethernet address. The ethernet controllers are initialized, the ECM in the FPGA is activated and a FPGA is programmed to transfer a packet from memory to an ethernet controller. The ethernet controller is programmed to transmit the packet, and an external ethernet device is programmed to listen for packets on the LAN. Table 4.6: MCU test plan, part 3 OK (Note 1) 4.3. Microcontroller test 61 Test nr 23 Program module EtherNAT subsystem Test name Test description Expected results Results Nut/Net Ethernet Transmit test The ARP packet is transmitted through the correct ethernet interface. Not OK 24 EtherNAT subsystem Nut/Net Ethernet Receive test The ARP packet is received by the Nut/Net ARP subsystem, and the ARP entry is written to a serial port. Not OK 25 EtherNAT subsystem Nut/Net IP Transmit test The ICMP ping packet is transmitted through the correct ethernet interface Not OK 26 EtherNAT subsystem Nut/Net IP Receive test The ARP ICMP ping packet is received by the Nut/Net IP subsystem, and a confirmation is written to a serial port. Not OK 27 EtherNAT subsystem Packet Routing test The IP packet is correctly translated and received by the other host. Not OK 28 EtherNAT subsystem Packet Route Create test A simple ARP packet is sent from the Nut/Net system to a specified ethernet address. An external ethernet device is programmed to listen for packets on the LAN. A simple ARP packet is sent from an external ethernet device to the Bbox. The Nut/Net system is programmed to listen for packets on the LAN. A simple ICMP ping packet is sent from the Nut/Net system to a specified IP address. An external ethernet device is programmed to listen for packets on the LAN. A simple ICMP ping packet is sent from an external ethernet device to the Bbox. The Nut/Net system is programmed to listen for packets on the LAN. Two hosts are connected to each of the BBox ethernet interfaces. An IP packet matching an existing routing table entry is sent from one host to the other. A SYN packet initiating a new connection is sent from one host to another through the BBox. The BBox is programmed to write the routing table to the serial port, before and after receiving the SYN packet. The correct routing table entry is created and displayed on the connected terminal, and the correctly translated SYN packet is received by the other host. Not OK Table 4.7: MCU test plan, part 4 62 Testing Test nr 29 Program module EtherNAT subsystem Test name Test description Expected results Results Packet Route Timeout test A connection is established between two hosts. The connection is allowed to time out. The BBox is programmed to write an acknowledgement to a serial port when the routing table entry has been deleted. A connection is established between two hosts. The connection is closed by one of the hosts. The BBox is programmed to write an acknowledgement to a serial port when the routing table entry has been deleted. A DHCP Lease request is sent to the BBox from the LAN. The BBox is programmed to write lease data to the serial port. DHCP lease renewal is also tested. The BBox is able to get a DHCP lease from an external DHCP server on the WAN interface. The AVR writes the deleted routing table entry to the serial port. Not OK 30 NAT subsystem Packet Route Close test The AVR writes the deleted routing table entry to the serial port. Not OK 31 DHCP Server subsystem DHCP Server test The DHCP client host is able to get a DHCP lease from the BBox. The DHCP client is also able to get a DHCP lease renewal. N.I. 32 DHCP Client DHCP Client test The BBox requests a DHCP lease, the DHCP server responds and the BBox is configured with the correct IP settings according to the DHCP reply. The AVR loads the initialisation routine which initialises all subcomponents (X10/Phone interface Ethernet controllers and IP subsystem). OK 33 General Power Test Up The unit is powered on. Table 4.8: MCU test plan, part 5 OK (Note 3) 4.3. Microcontroller test Test nr 34 Program module General 35 63 Test name Test description Expected results Results Power Failure Test The Power Failure switch is activated. OK (By simulating power loss) Home Control System Receive Event Test 36 Home Control System Modify event rule table 37 Web Interface HTTP Request test 38 Web Interface Web Interface Access to the requested resource is granted based on the origin of the request. The correct configuration page is displayed, and the configuration parameters of the BBox are affected by the update. N.I. 39 HTTP Access Control test BBox Configuration test 40 Web Interface A HCS Event is generated and delivered to the HCS module from the SMS, X10 or Web interface. A new rule is generated and added to the event rule table. The new event rule is tested as above. A BBox HTTP resource is requested by an external host. An external host attempts to access a restricted HTTP resource. A host originating from the LAN is able to access the BBox configuration web page (after authorization), and post updates to the configuration. A host originating from the LAN or the WAN (after authorization) is able to access the BBox HCS Control web page and trigger events and, in the case of a LAN connection, modify event rules The AVR sends an SMS message. When power returns, the AVR will reload configuration data. The HCS module responds by taking the appropriate action as described by the (pregenerated) event rules. The event rule is added, and the appropriate action is triggered by the external event. The requested resource is delivered to the host. The correct web page is displayed, and the BBox triggers the specified events or modifies the specified rules. N.I. HCS Control test Table 4.9: MCU test plan, part 6 OK N.I. N.I. N.I. 64 Testing 4.4 System test 4.4.1 Network performance tests The general network setup used for the basic network tests consists of two standard PCs connected by a hub to the LAN port, and a third PC connected to the WAN port, as described in table 4.1 (page 64). Figure 4.1: Network performance test setup For all the tests, the following BBox setup is used: • WAN side IP: 129.241.102.201 (dmlab-web1.idi.ntnu.no), mask ff.ff.ff.00 • LAN side IP: 10.0.0.1 (RFC1918 private address space), mask ff.ff.ff.00 • DHCP server active • BBox MAC: 00 51 C5 0C 7E 75 1 Connectivity test The BBox is configured as per the above, and the ping command is run at both ends. For the following, R will denoted the remote (WAN-side) PC, and L the local PC. Commands: Expected results: (R) ping dmlab-web1 (L) ping 10.0.0.1 "dmlab-web1 is alive", etc Table 4.10: Ping command Verification of the NAT service A simple test of the NAT service is done by opening a TCP connection from a PC on the LAN side to one on the WAN side, using the ’netcat’ utility. Network analyzers ("packet sniffers", in this case ’tcpdump’) are at 1 While technically non-compliant, we did not have $1,650 lying around to register an OUI. Besides, any six octets should do. 4.4. System test 65 both ends to verify the correctness of the translation. Commands: Expected results: (R) nc -vlp 1234 (L) nc -v glenfiona 1234 A connection should be established, and any text written on one keyboard should appear on the opposite screen. Table 4.11: NAT verification Latency test One of our concerns during the design was whether a low-power microcontroller such as the microcontroller would be able to adequately handle the task of routing vast amounts of network traffic without causing noticeable delays. It is well known that at high speeds, protocol overhead often dwarfs the actual network latency. Commands: Expected results: (L) ping -s dmlab-web1 The round-trip time of a single packet will appear. Table 4.12: Latency test To compensate for the latency of the two PCs used, another test run is done with the two PCs connected back-to-back, and that result is subtracted from the result above. Performance test As a rough test of the overall system performance under load, a large file transfer is performed. Again, the performance is measured with the BBox in place, and using a direct crossed-TP connection. NAT application level test A realistic load is simulated by disconnecting the Remote PC, and connecting the WAN port directly to the Internet (by way of the NTNU Campus Network). Both local PCs are then used to surf the web simultaneously, and the system performance is monitored. 4.4.2 Power The voltage of the 5V-plane is measured to 5.11V, and for the 3V6-plane the exact value is 3.55. These values are constant over the entire plane. The voltages in the power planes start dropping when the input power drops below 8V. We have not tested the upper limit of the input power since we only have two operational boards. The current delivered to the box was measured to 330 mA. With a 9V power supply, the power consumption is thus 3W. It should be noted that the FPGA was operating at a very low frequency, so the consumption may increase when the box is operated at full speed. 66 Testing During normal operation the box is connected to an outlet, so the power consumption itself is not a problem. However, some heat is dissipated in the voltage regulators. Thanks to the relatively large cooling ribs, the temperature only increases slightly above body temperature. Chapter 5 Tools 67 68 Tools 5.1. Software used 69 5.1 Software used 5.1.1 Mentor Design Capture/Expedition PCB Design and layout of PCB board; schematics are drawn in Design Capture. This program supports a modular design. Several components are available from a library, and new parts can be added to the library. From the schematics, a netlist can be generated. This netlist can then be used in Expedition to connect and place the components on the PCB. Traces on the PCB are then routed, either manually og automatically. Various options concerning the PCB can be selected, including the number of layers and ground/voltage plane design and placement. Drill holes, vias and the silk print can be specified. The resulting Gerber files are sent to the PCB manufacturer for production. 5.1.2 Xilinx Foundation 3.1i The FPGA development was initially done using Xilix Foundation. This turned out to be a bad idea, as the development environment leaves a lot to be desired. The "Project Manager" seems to be a loose collection of scripts about to collapse under its own complexity. The individual modules are interdependent, often circularly. For instance, changing the name of an input pad which has been locked to a physical pin will cause the implementation engine to fail. Unfortunately, the constraints editor takes its lists of i/o pads from the output of that engine. Several times, one part of the system managed to delete a file needed by some other part, leaving only a cryptic "design does not exist" error, with no clue as to which file was missing. In essence, we were spending more time debugging the GUI rather than the design. 5.1.3 Aldec Active-HDL v4.2 Active-HDL is built from the ground up for VHDL (as the name would imply), and works like any other development environment. The simulator/debugger is integrated with the editor. Even the parser is better. Where Foundation splurts out a terse "Syntax Error", AHDL will explain exactly what is wrong, and sometimes even why. AHDL also has a powerful scripting language (actually at least three: a BASIC variant, Tcl/Tk and Perl), which enabled us to automate the unit testing and simulation. The simulation script would crudely parse the entity and architecure descriptions, extracting a list of all inputs, outputs and signals defined. VHDL comments in a special format would specify what signals were to be driven by the simulator: entity Foo is port ( CLK: in STD_LOGIC; --&; 40mhz RESET: in STD_LOGIC; --&; 0 BONK: in STD_LOGIC_VECTOR(1 downto 0); --&;00 ..... The above lines would cause CLK to be driven by a periodic signal at the given frequency, and sets the initial value of the other signals to 0. The following script would set the time-varying inputs: \ --100 reset=1 -- after 100 ns, reset is set to 1 \ --300 bonk=11 -- after a further 300 ns, bonk is set to 11 \ --300 bonk=10 | bonk=01 | bonk=00 -- some more vectors (staggered) 70 Tools \ --800 done -- stops the simulator 800 ns after the last input The implementation was done by running the various Foundation Express tools from the command line using GNU make, automating the entire process from VHDL code to uploadable bit file. 5.1.4 Atmel AVR Studio AVR Studio is a complete software environment for assembly programming and software debugging for the AVR microcontrollers. The software also supports programming of the microcontroller using the SPI og JTAG interface, and in-circuit emulation using appropriate hardware. 5.1.5 AVR-GCC AVR-GCC is a free C compiler for the AVR family of microcontrollers. It has support for most of the AVR product line, including the ATmega128. At first it was decided that the AVR group should use the IAR Workbench, since we believed that this was the only tool that would provide a sufficient debugging environment. But because of license dongles sometimes failing, difficult user interface and the fact that Nut/OS had to be modified to work with IAR, we decided to go for gcc. 5.2 Hardware used 5.2.1 Atmel STK 500 Figure 5.1: Atmel STK 500 These starter toolkits have been used for testing all sorts of microcontroller code. Experiments include X10 testing, SMS sending and FPGA interfacing. As these boards come with several buttons, LEDs and port connectors as well as a RS232 serial port they are very flexible. The default microcontroller for these boards is an AT90S8515. By adding an expansion card, the STK501, we could use the ATmega128. 5.2. Hardware used 71 Figure 5.2: Atmel AVR Embedded Internet Toolkit 5.2.2 Atmel AVR Embedded Internet Toolkit The AVR Embedded Internett Toolkit is a stand-alone web server on a small PCB, including an AVR microcontroller and a CS8900A ethernet controller chip. This has been useful for learning how the CS8900A works. Packet sending was tested by reprogramming the on-board microcontroller. We also soldered on an expansion port so that we could interface with the FPGA test board. 5.2.3 XILINX FPGA test board The Xilinx FPGA test board contains two FPGAs, an XC3130A and an XC4006E. The board has connectors for all FPGA pins, and a reasonable collection LEDs and switches for debugging. In our development phase Figure 5.3: XILINX FPGA test board we used the XC4006E extensively. The board can be programmed via an XChecker cable. 72 Tools Figure 5.4: Hewlett Packard Logic Analyzer 5.2.4 Hewlett Packard Logic Analyzer The HP logic analyzer is a powerful tool for analyzing a digital design. It includes a pattern generator, an oscilloscope and probably most important: an analyzer. Its pods can be connected directly to the test pods on our PCB, making it easy to analyze for instance bus data. The analyzer has a powerful PC interface. 5.2.5 DEC VT320 teletype Figure 5.5: DEC VT320 teletype This VT terminal has an RS232 interface which makes it practical for connecting to the BBOX. It has been used extensively for debugging the system. Chapter 6 Notes 73 74 Notes 6.1. Design flaws 75 6.1 Design flaws • A pull-up resistor was left unplaced in the PCB design. This was handled by implementing it in the FPGA, since this device can be set up with internal pull-ups. The resistor in question has the reference designator R18_1 and is found in appendix B.1.6. • No DTR pin (Data Terminal Ready) was connected to the RS232 port. This disabled communication with the phone. The DTR signal was later patched by soldering a wire from the MAX202 chip to the RS232. See appendix B.1.12. • In the original design, the output on the left side of the dual-port RAM was enabled as long as the chip was selected. However, it turned out that this would conflict with the microcontroller as it tried to write the next address into the latch through the common address/data bus. Both chips would drive the bus, leading to incorrect data being loaded into the latch. Fortunately, we anticipated errors in the design. Therefore, the trace from the Output Enable Left pin (OEL), among others, was placed well outside the memory chip itself on the PCB. Thus, it was fairly easy to cut the trace on the finished board and solder on a wire to the Read pin (PG[1]) on the microcontroller. See the schematics in appendix B.1. • The clock signal for the Ethernet controllers is disturbed when two testpods are connected to it. We believe the reason for this to be that the signal does not have enough driving strength. It was therefore difficult for us to foresee this. Our solution was to remove the pin with the clock signal from one of the two testpods to which it is connected. 6.2 Status 6.2.1 MCU SMS functionality is working. It is possible to send messages to the BBox and to receive a response. Response messages is sent as network alerts and will pop up immidiately on the receivers display. Integration with the X10 modules is complete. Table of possible SMS command contains only two entrys; LIGHTSON and LIGHTSOFF but may be extended if new X10 modules are added. X10 functionality is tested seperatly and found to be working. Using the X10 modules at school has partially failed because of problems with noise on the electrical system, but X10 commands have successfully been sent from and received at the Atmel STK501 development board using the ATmega128 microcontroller. After integration with the SMS part, we have not been able to successfully send/receive X10 commands, although we believe that the signals sent from the BBox are correct. We believe noise is corrupting the signal and thus creating situations that are hard to recreate and debug. 6.2.2 FPGA I/O Module works. Debug output / LED register works. Ethernet control modules work for direct control. This means that the microcontroller can control the ethernet controllers directly, and therefore send and receive packets. All data is sent over the BBus. The automatic blitting of packets into SRAM memory is not fully tested. It should be noted that the current FPGA clock speed is 1 MHz, as the initial testing at 50 MHz produced too many errors. It probably manages more than 1MHz, but the design will have to be optimized before we can run it at 50MHz again. We could investigate some form of multi-cycle instructions to increase the maximum clock speed. This way the packet transfers could run at optimal speed, and the read/write-to-register commands could be allowed to span over multiple cycles. 76 Notes 6.2.3 PCB The PCB was printed at Elprint in Bergen and has been used to test all components together. The board is working as planned, but two alterations have been done. A patch wire has been added between the microcontroller and the memory. This was done because of a design error, and the patch has been proved to work fine. The second modification is a patch wire between the UART driver chip and one of the serial ports. This is done because the unconnected DTR line on the serial port needs to be set to activate the cell phone’s data cable. 6.3 Future expansions 6.3.1 More RAM We have included the possibility of increasing the SRAM memory size twofold to 128KB without changing the board. The 128KB SRAM chip is pin compatible with the present chip. Addressing 128KB requires 9 address lines, one more than for the present chip. This last line is connected to an extra pin on the microcontroller, thus making it possible to reach the extra 64KB by using this pin for "RAM bank selection." 6.3.2 Expansion Port (’Geek port’) The unused pins on the FPGA were to be connected to a separate pod for future expansion, ie. a USB expansion board. This was unfortunately a good idea that was lost in the transition from system design to PCB design, mainly due to the time constraints involved in getting the PCB design finished, and a focus on all the other problems that needed to be resolved. 6.3.3 More HCS protocols The X10 protocol already supported gives the possibility of controlling a wide range of home automation devices, like alarms, heaters, switches, sensors and dimmers. Other home control systems could also be implemented. Assuming that these home automation transceivers can be controlled via a serial port, it would be easy to connect them. The microcontroller still has program space for implementing the control code. 6.3.4 PPPoE The PPPoE protocol should be implemented if the box were to be mass produced. This should be possible by extending the network code in the microcontroller. As the PPPoE is the protocol used by the large Norwegian internet service provider Online (Telenor Internett), this would have to be supported. Chapter 7 Discussion 77 78 Discussion 7.1. Workflow 79 7.1 Workflow Because of the heavy workload, we divided the project group into three subgroups: • PCB group • AVR group • FPGA group We found this grouping the most natural, even though we knew it was not optimal for the learning process. But in a project of some size, it is impossible for all group members to participate in all activities. We arranged frequent meetings to organize the work and to exchange ideas and experiences. To arrange the paperwork we set up a wiki web page. The wiki page works like a blackboard where everybody can add, change or remove the pages. This way all the information could be shared easily. In addition to the three subgroups, a few key responsibilities were distributed. A leader for the project was elected, to keep everything together and make sure it did not dwindle into chaos and disorder. A documentation officer was appointed, to distribute the documentation tasks, and ensure that it was done. Documentation was regarded as a communal task and responsibility, but one person being responsible for the task, was a good way of making sure it would be done. Finally, a parts/purchase officer was appointed to make sure we had all the parts/components we needed for the task, this included both going through what we already had, and making sure purchases of what we did not have were done. The PCB group had the hardest time in the beginning because of tight deadlines and a few problems with the software. This period, the two other groups got to know the tools and hardware they were supposed to use. None had any experience with PCB layout, so the group had to learn as they went along. After the Gerber files with the board layout had been sent to Elprint for production, the PCB group could take a deep breath. It was now up to the AVR and FPGA groups to implement the code needed to make the BBox do something useful. At first it was decided that the AVR group should use the IAR Workbench, since it was believed that this was the only tool that would provide a sufficient debugging environment. But because of license dongle problems, complex user interface and the fact that Nut/OS had to be modified to work with IAR, it was decided to go for gcc. The FPGA group also ran into problems with software licenses. In the beginning there were lots of trouble with the Foundation license server. After finally getting Foundation up and running, the group soon found out that the Foundation Project Manager environment was very troublesome to use. They decided to abandon Project Manager and use a makefile instead. Aldec Active-HDL was chosen as the new HDL editor. This worked much better. The Aldec license also stopped working one Friday evening so the weekend coding had to be delayed a bit. The guys at IDI network administration even took the license server off the network, but this was soon fixed this by (somewhat anxiously) taking the matter in our own hands to get it up and running again. There were also problems with the computer network at campus because of a disk crash at STUD. The result was that our wiki pages were gone a couple of days, and that all mails were delayed for about a day. When we managed to get the files back, we moved them from STUD to IDI. Since then, there have been no problems with the servers. A factor that has been slowing us down a bit is the lack of operational computers. In reality, only four machines have been stable enough for us to use. The rest suffer either from lack of software, instability or simply head-ache inducing monitors. Because of this we had to bring some of our own hardware to the lab. Towards the end we got a fifth decent computer for use in the hardware lab. 80 Discussion The staff had a policy of not giving us very much help, so during the project we have been pretty much on our own. We were expected to find all answers ourselves. Since there has been no lectures the web has been our main source of information. We do not know how much this has slowed us down, but we know from experience that searching for relevant information on the web can be a time consuming process. A simple search often result in hundreds of hits, and finding just what you are looking for can take hours. Reading product data sheets and application notes is confusing when you have never seen one before. To sum it up, this project has been a race against the clock. To design, get parts, build and implement software for a router from scratch is time consuming. Much more time has been put into this project than expected in the beginning. There have been late nights for all of us, and other courses have suffered because of this. 7.2 Experiences 7.2.1 General We have all learned quite a few things from this project. Perhaps most of all how many pitfalls there are. Software licenses were a constantly returning problem. Even though you own a license it will not always work. And computer support is not always as easy as it sounds. Getting all the parts for the box was not trivial either. If it had not been for EIAB, a specialist in providing urgently needed out-of-stock parts, we would not have managed to get the SRAM somewhat on time. We learned it is important to follow up your orders and check on the status. Things will usually not arrive when they are supposed to, you should get the contractors to guarantee delivery by a given date. It would also have been a good idea to in advance check the availability of parts while being in the process of deciding what to use. Because we were working under a very specific deadline, availability would have been an important factor in deciding what parts to use. Finding a second source for all components is also a very good idea (although it should not be counted upon, the group originally had two sources for the SRAM, and none of them would have been able to deliver on time). 7.2.2 Tutorials The only exercises in the course were tutorials for the tools we were going to use. While some of the tutorials gave a good introduction, others were either unavailable due to license problems, or not consistent with the actual installed software (e.g. the logic analyzer tutorial). This resulted in some people not finishing the tutorials on time. 7.2.3 Software development A lot of time was wasted in the AVR group before any real, working code was produced. A number of factors contributed to this. First, the group decided to use the IAR compiler. This turned out to be difficult, as they also wanted to use the Ethernut code, which was only written to support the AVR-GCC and ICCAVR compiler. Rewriting the code was briefly attempted before switching to the GCC compiler. Writing the software without being able to test it also proved to be difficult. When dealing with low-level hardware programming there are a lot of issues to deal with. I.e., getting the cell phone and X10 transceiver to communicate with the microcontroller was almost taken for granted when we planned the project. Some of the code that worked perfectly on the STK300 and STK501 development boards did not work "out of the box" on the BBox board. 7.3. The product 81 7.2.4 Teaching We would generally have preferred more teaching. It is OK to make the project environment realistic. However, in a real project one would be working together with experienced people from whom to learn. In this case, we were all freshmen. It is useful to learn how to find the information one needs on the net, but it is very time consuming. With the limited time available, it is hard to find all the information that is needed. It also means that we had to divide into subgroups and work separately. The result was that we did not learn quite as much about the subjects that the others were working on. As opposed to the previous years’ projects, the group did not have any experience in VHDL coding or PCB design. The group members were expected to handle a lot of problems on their own. Fortunately some of the more experienced students were available when we needed answers to difficult questions. Difficulties, stress and lack of prior experience taken into consideration, it has been an interesting course. As opposed to classic lecture oriented teaching, working on an actual product and being able to see results of what you are doing is both fun and interesting. In addition, there are a lot of minor experiences made related to both the electronics business, and working as a team. Things like, seeing that it is useful having key people with responsibilities, such as a leader, documentation officer, and a parts/purchase officer, or experiencing that getting that particular component is not always that easy. 7.2.5 Learning We have learned quite a bit from this project. None of us were experienced with hardware design before starting on this project, however we all had interest in the field. We have been taken through the various steps in the hardware development process. We all gained basic knowledge of the fields of PCB, FPGA and microcontroller design. As a result of our group structure, each has also acquired a deeper knowledge of their assigned task. Now we have what it takes to participate and contribute in hardware discussions. 7.3 The product A picture of the completed BBox is shown in figure 7.1 (page 82). The box is complete with both the exterior and the interior. In front the logo, the button and the LEDs are visible. The back contains all connectors and ethernet status LEDs. The BBox provides all the features Bjarne expect, although not all of them are fully implemented. Going through the requirements specification we can point out the requirements that are and are not fully met: • The box is not yet able to share an Internet connection. The hardware allows for it, but the software is not complete. Therefore many of the network features are not met. However, we have succeeded in sending and receiving IP packets so we know that the design works. More time would have been needed for implementing the high-level network software. The web interface, for instance, has not been prioritized. Following from this, the load meter and mail alert lights are not completed. • The home control requirements are more or less met. The software is tested alone and is found to be working, but it is not fully integrated with the rest of the system. • The non-functional requirements are met, with the exception of the backup power source. As the box is designed for people having little experience with computers, there is only one button on the front panel. The rest of the user interface is to be implemented as a simple web page. The design is definitely appealing. Estimated power consumption during normal operation is less than 4W. 82 Discussion Figure 7.1: The BBox • Testability requirements are met. The design is very testable. Although the lack of fully implemented software, the BBox represents itself in a respectable manner. Given more time, a complete network software could have been developed. 7.4 Conclusion All group members have worked together on this project, even though we have been divided into subgroups. No one has been allowed to tag along without contributing to the work being done and no major disagreements have arised. All in all, we feel that we form a strong group. We have experienced that a hardware development project is a time-consuming process. Many factors may slow down development, and there are critical events of which further project progress is dependent. We have learned about several fields, getting not only technical, but also valuable project experience. As the BBox is starting to become reality, we look back and think about what we expected when we were given the assignment of building a broadband router (with extra features) from scratch. Not all of us believed that we would get as far as we did, but today the BBox is looking quite good, and much of the functionality is implemented. "Ambitious, yet realistic!" has been our unofficial motto. This means we have tried to make a working product with lots of cool functionality and still keeping it at a realistic level. Focus has been on completing the box, not adding too much extra features. Therefore some ideas were abandoned even though they would have increased the gadget factor. This, combined with hours of hard work has resulted in a product we are proud of. As far as we are concerned, the BBox is a success. Chapter 8 Acknowledgements 83 84 Acknowledgements 85 We would like to give thanks to: • Our instructor Karstein Kristiansen, Morten Hartmann and Gunnar Tufte for support and follow-up. • The DM2001 project group for providing us with their PCB design files. We saved quite some work because we could use some of their footprints and parts of their schematics. • Asbjørn Djupdal and Geir Svihus for hints and tips on Foundation. • Gaute Myklebust from Atmel for providing us with the newest Atmel development kits and microcontrollers. • ’Hatling A/S’ for providing us with the plexiglas sample. • ’Verkstedteknisk’ in Perleporten for carving the plexiglas BBox logo. 86 Acknowledgements Chapter 9 Bibliography 87 88 Bibliography 89 [1] Econ Oscillator DS1075M Data Sheet: http://pdfserv.maxim-ic.com/arpdf/DS1075.pdf Application Note: http://pdfserv.maxim-ic.com/arpdf/AppNotes/app205.pdf [2] Microcontroller Atmel ATMega128 Data Sheet: http://www.atmel.com/atmel/acrobat/doc2467.pdf Application Notes: http://www.avrfreaks.net/Devices/devices.php?action=1&;devid=54 [3] Octal D-type latch with 3-state output Philips 74ALS573B http://www.elfa.se/images/lw_hires/B12214_1.GIF [4] Triple 2-channel multiplexer Philips 74HC4053 http://www.elfa.se/images/lw_hires/B12311_1.GIF [5] Philips LED Shift-Register HEF4894BP [6] Field Programmable Gate Array Xilinx XC4044XLA Data Sheet: http://direct.xilinx.com/bvdocs/publications/4000.pdf Product Specification: http://www.xilinx.com/partinfo/ds015.pdf [7] JTAG Multilinx http://www.xilinx.com/xapp/xapp168.pdf [8] SPROM XC1701L Data Sheet: http://umwnt1.physics.lsa.umich.edu/alpha/images/xc1701.pdf [9] Cirrus Ethernet Controller CS8900A Data Sheet: http://www.cirrus.com/pubs/cs8900a-4.pdf?DocumentID=532 Application Note: http://www.cirrus.com/pubs/An83-3.pdf?DocumentID=635 [10] Cypress Dual Port SRAM CY7C009 Data Sheet: http://www.cypress.com/products/datasheet.cfm?partnum=CY7C008-15AC Application Notes: http://www.cypress.com/support/app_note_family.cfm?fname=Dual%2DPorts&; [11] Adjustable Voltage Regulator CS-5203A Data Sheet: http://www.elfa.se/pdf/73/730/07307705.pdf [12] RS-232 Level Shifter Maxim MAX202CPE Data Sheet: http://www.elfa.se/pdf/73/730/07302359.pdf [13] Manual Reference AT Command Set (GSM 07.07, GSM 07.05, Siemens specific commands) for the SIEMENS Mobile Phones S35i,C35i, M35i http://www.my-siemens.com/external/tt/hq/mw/hd/hd/p35/s35i_c35i_m35i_atc_commandset_ [14] SMS messages and the PDU format http://www.dreamfabric.com/sms/ [15] NutOS 90 http://www.ethernut.de/en/software.html [16] Perry, Douglas: VHDL, 3rd Edition, McGraw-Hill, 1998. [17] Elprint http://www.elprint.no Bibliography
 0
0
advertisement



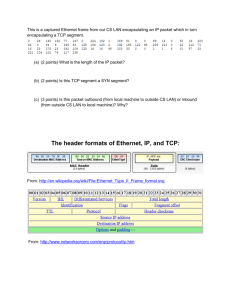


Download
advertisement
Add this document to collection(s)
You can add this document to your study collection(s)
Sign in Available only to authorized usersAdd this document to saved
You can add this document to your saved list
Sign in Available only to authorized users