~1 Signature Redacted
advertisement

~1
iNS
9 MAR1944
O
RESPONSE CHARACTERISTICS OF THE VALVE CONTROLLED HYDRAULIC SERVO
by
Lewis D. Lipschutz
Submitted in Partial Fulfillment of the
Requirements for the Degree of
Master of Science
in
Mechanical Engineering
from the
Massachusetts Institute of Technology
October 1943
Signature of Author:
Signature Redacted
Signature Redacted
Certified by:
Thesis Supervisor
Signature Redacted
Chairman, -De p&tment, Committee on Graduate Students
CRA
Table of Contents
Page
Acknowledgment.........
...
.............................
Introduction .................
1
3
.......................................
Description of Servo Investigated, and Notation
Description of the Valve Controlled Servo ................
4
6
Diagram of the Valve Controlled Servo ....................
..............................................
Notation.
7
Limitations on Servo Investigated ........................
Assumptions Made About Servo Investigated ................
9
11
Results, and Suggestions for Further Work
....................
Family of Theoretical Response Curves
Discussion of the Response Curves ........................
12
Comparison of Empirical and Theoretical Response Curves ..
Discussion of the Agreement between the Theoretical
15
13
Operation of the Apparatus ...............................
16
17
Suggestions for Further Work .............................
18
and Empirical Responses......... ...................
Dimensional Analysis and Solution of the Differential
Equation of Motion
Derivation of the Equation of Motion .....................
Dimensionless Analysis
..................................
Series Solution of the Differential Equation..........
Step by Step Solution of the Differential Equation .......
Stages of Operation.......................................
20
25
29
31
34
Description of the Apparatus
Description of the Construction, and Test Procedure ......
Photographs and Drawings of the Apparatus................
38
41
Appendix
Sample Calculations
.........................
.............
Successive Differentiations of the Equation of Motion ....
Data Used in Plotting Theoretical Response Curves ........
Sample Tapes Showing Empirical Response Curves ...........
Calculations and Data for the "Comparison Curves" ........
2 3G5~I
45
50
54
57
58
Introduction
The only analytical work previously done upon the valve
controlled hydraulic servo has been by Professor C. E. Grosser of
M.I.T.
In his article, "Designing Hydraulic Servo Circuits", Machine
Design, January 1942, he described the valve controlled servo and
derived its differential equation of motion.
This article was,
essentially, the starting point for the following thesis.
In "Apply-
ing Hydraulic Servo Circuits in Machines", Machine Design, April 1942,
the differential equation was solved and the response of a given servo
was calculated.
This second article is largely superseded by this
thesis wherein a better solution has been found for the differential
equation.
The valve controlled type of servo enjoys a wide use, but
its design has always been based upon experience and upon trial and
error.
There was a definite need of a design chart which would pre-
dict the response of a given servo under given conditions, a chart
which would indicate the effect of changing the various dimensions of
the servo.
The purpose of this investigation was twofold; for one, to
develop the design chart mentioned above.
This was to be accomplished
by a dimensional analysis of the servo, a complete solution of the
differential equation of motion, and a presentation of the resulting
curves in terms of dimensionless parameters.
The second object of
the thesis was to build a valve controlled servo and check the validity
of the response curves which were mathematically calculated.
It should be noted that the name valve controlled servo is
2
used in this thesis to denote the servo which is sometimes called a
pressure controlled servo.
It was thought that the former name was
more descriptive of the nature of the control.
MMd
3
Acknowledgment
The author wishes to express his sincere appreciation of
the help received from Professor C. E. Grosser, faculty advisor to
this thesis project.
In the midst of his own pressing work he very
patiently discussed the many problems which arose during the investigation, and was instrumental in obtaining most of the material
and parts used in the construction of the servo.
The machine shop work was done with the help and advice
of C. A. Bulfinch, R. J. Bowley, and C. W. Christiansen, instructors
in the Machine Tool Laboratory.
4
Description of the Valve Controlled Servo
For a complete description of the valve controlled hydraulic
servo see the magazine articles mentioned in the introduction.
Only
a brief description of this type of servo will here be given.
The primary elements of the servo motor are a source of
high pressure oil, a four-way valve, and a hydraulic ram.
When the
system is in equilibrium, the valve lands cover both orifices of the
valve and there is no tendency for the main piston to move.
Now, if
we wished to move the load a certain distance to the left as quickly
as possible, we would suddenly move the signal shaft to the left and
then hold it stationary in its new position.
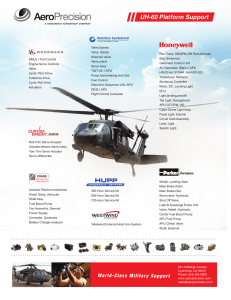
The diagram on page 6
shows the servo just after this step signal has been imposed.
The
valve spool is displaced to the left, putting the right hand end of
the cylinder in communication with the source of high pressure oil,
and the left hand end of the cylinder in communication with the reservoir which is at atmospheric pressure.
The difference in pressure
causes the piston, with its load, to move to the left.
This motion
of the output shaft, now that the signal shaft is being held stationary,
moves the valve spool back toward its neutral position, closing the
the valve ports, and throttling the oil flow to and from the cylinder.
When the valve spool again covers both orifices there is no longer any
pressure difference between the two ends of the cylinder and equilibrium
is established at the new position of the load.
As just described, the follow-up was without overshoot, but
under some conditions, of course, overshoot and oscillation occur before
equilibrium is reached.
'I
DESCRIPTION OF SERVO INVESTIGATED
and
NOTATION
5
In order to avoid negative pressures and possible sucking
of air into the system, both ends of the cylinder are connected through
check valves to the body of oil in the oil reservoir.
In order to
protect the cylinder from excessive pressures, both ends of the cylinder
are equipped with relief valves.
To avoid complication, these two
refinements were not shown on the diagram.
We will investigate the response characteristics of the valve
controlled servo in the simple form just described, but the results will
be applicable, through simple and obvious transformations, to the cases
in which this servo is used to control the rotation of a mass.
In
such cases the servo may remain as described with the simple addition
of racks and pinions to achieve a limited rotation, or else the hydraulic
ram may be replaced by a fluid motor and the translating four-way valve
replaced by a rotating one.
The results to be obtained will still
apply provided that the limitations later to be stipulated, such as
leaklessness and inelasticity, are met.
6
MYDRAULIC RAM
//////H
//////
OUTP
FOUR WAY VALVE
II
-a1,I
-- L-
.
TM~
I
-~
~A
LOW PRESSVRE ~ P%
RE SERV0Fl
PM
HIGH PRESSURE -- Pi
ACCOtPAL AT
DIAGRAM OF VALVE CONTROLLED HYDRAULIC
SERVO
Eq.
7
Notation
t
=
Time
x
=
Displacement of output shaft in response to signal
x -dx
=
-
x=
=
dx
=
dt
R
=
Velocity of output shaft
=
Acceleration of output shaft
Ratio of the displacement of the output shaft to the dis-
placement of the valve spool (see diagram on preceeding page)
e
= Magnitude of the step signal measured in terms of displacement
of the valve spool
S
=
Re
=
Magnitude of the step signal imposed, measured in terms
of displacement of the output shaft
v, =
Average velocity of liquid in the connecting lines
M
=
Total effective mass of load, servo motor, and accelerated liquid
F
=
Load force; always in direction opposing motion of the load
A
=
Area of ram piston
a, =
Connecting pipe and passage area
ao =
Valve opening orifice area
(This quantity is a variable, varying
with movement of the output shaft.)
=
a
=
a,
f
=
Pipe friction factor; a function of Reynolds number.
(a0 )max
See Limitations on page 9.
Approximately
equal to 0.02.
L
=
Total length of connecting pipes and passages
d
=
Diameter of connecting pipes and passages
n
=
Number of entrance and exit losses in circuit
K
=
Average loss factor for entrance and exit losses in the circuit.
Approximately equal to 0.75
8
C
=
Coeffi cient of discharge at rectangular valve orifices.
mately equal to 0.6.
pH =
High p ressure
pL=
Low pressure
p
=PH ~
I
See page 18.
L
Mass density of the liquid
Dimensionless Groups:
T
=
J
X
=
1 -- x
=
R A
MSa
X=dX
dT
2
2
-dT
Dimensionless time
=
Fraction of step signal yet to be recovered
Design parameter
Approxi-
9
Limitations on Servo Investigated
In order to reduce the number of variables in the differential
equation of motion, certain limitations must be imposed upon the construction of the servo to be investigated.
Only if
this is done, can
the equation be written in terms of three dimensionless parameters,
as is necessary if the results are to be presented as a single family
of curves.
The limitations, with some comments on their importance, are
as follows:
(1)
F = 0:
This means that only a mass loading will be
The load force, load friction, and friction in the servo
considered.
motor itself are all to be negligible.
As far as the load is concerned,
it need only be mounted on ball or roller bearings to meet this restriction.
As far as the hydraulic ram is concerned, leaklessness should
now be attained by using close-fitting, carefully aligned, machined
surfaces rather than piston rings and piston rod packing.
The experi-
mental servo described later in this report was constructed with the
purpose in mind of eliminating leakage and yet keeping friction to a
minimum.
(2)
pressure:
Relief valve pressure equal to three times the operating
This is not a serious limitation, for three times the operat-
ing pressure is a reasonable safety limit.
Besides this, most actual
servos will have enough leakage so that the high pressures theoretically
reached, will not be reached in practice, and the relief valves will
have no occasion to operate.
(3)
No step signal beyond full orifice opening of the valve:
10
In other words, e is never to be greater than the length of the valve
ports.
This, too, is no serious restriction, for a step signal which
fully opens the valve ports is quite large enough to be a severe test
of the servo's response characteristics.
(4)
The valve orifices:
(a)
Square valve orifices:
This is a rather serious
limitation in that it excludes such other shapes as the annular
orifice, and the rectangular orifice with tapering ends.
In spite of
this standardizing on a square orifice however, the effect of varying
the size of the orifice, and varying other design dimensions will
still be apparent in the results.
(b)
a,
=
(ao)max; that is, the area of the connecting
piping equals the area of the valve orifices:
limitation, but only reasonable design.
This is hardly a
A slight departure from this
equality would not materially affect the response of a servo, and in
such an event, the common area to be used in calculations should be
taken as the orifice area.
(c)
Balanced valve spool attained by splitting orifices
into two equal areas, diametrically opposed:
This means that what
has previously been referred to as the valve orifice will now refer
to two square ports, diametrically opposed; and the sum of the areas
of these two ports is to equal the area of the line.
11
Assumptions Made About Servo to be Investigated
In addition to the limitations just listed, two assumptions
must be made before deriving the differential equation of motion for
the servo.
It is assumed that the apparatus is leakless and inelastic.
In practice, both of these assumptions can be met quite closely.
If
rubber pipe lines are not used, or used only in short lengths, and if
no gas is entrapped in the circuit, then the apparatus will be practically inelastic.
To approach leakless operation it is necessary to
machine the piston and cylinder of both the valve and hydraulic ram
to very close tolerances.
The effect of leakage will not be entered
into analytically, but qualitatively it may be said that leakage
would not affect the initial response very greatly, but would allow
more overshoot than a leakless valve and ram.
RESULTS
and
SUGGESTIONS FOR FURTHER INVESTIGATIONS
T
1*11
1>1
I.
-A ki
g kWid
I...
I 41
~- ~~~ ~~ ~ ~ ~ ~ ~~~111
1'
Jil
- *p
~
q,
,q,~~f~~.
~
I,
4k
ii
jj-
II
,,Y,,I
11'
FP 7T
II
.4-2
I,
-"1-
-
1 6
TL~2
litkri
'HT,
1
jl
1
-1-i-v
................
[n.~
?7t
1
L i
. . .. . . . . .
ft
121:
Lll 11
.. . . .
-4-
.
11dl_
i
4-44-11 1 1 11
4
44+
41
7I~IV t
i
___
~iA~t~T1
-Tlj
I
1:2
7.1
424
___T]I
IT
I7
77bd 1~%~/ ~V~
V1 114+
4;,
LII ;t
LI ii.
.
I
I
-
*
*
+4~t2
4IT
K~~vrr
1
ii
'1'~~
I.
ii
1
LET 1T_
I IE lEE_ _.
lan 1:11 L I I
. iJIL L i L-1
1LLL
_T1
Li
:71
rTIht
i-f
LLL~i
K .1
74
Ti~
4 i
22.
I -j-~
1- Iij'
:
+4'
411.--ILI' 11
.
mka
_T_
I.
I--
F-
hW~1WV i
1+1
I
T
I.
7
F---
M~&;~sL4
I
~
19 V J
L
1-i
*
-~
I
-
~1~
.1
1'*
'iT:
I:,"
77
+Jr
I
I~~~-
2
1
-4~-
1
*-7
7--
7112
.2~
13
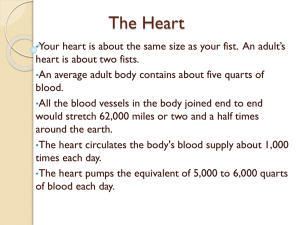
Dimensionless Response Curves
The curves on the preceding page are the most important
results of this thesis.
In fact, their obtainment was the first
object
of the investigation; the second object being an empirical verification
of them.
Dimensionless displacement is plotted as a function of dimen-
sionless time for various values of the dimensionless design parameter.
The absence of overshoot in some curves, and the rapid extinction of overshoot where it does occur, indicates that this type of servo
has a strong inherent damping.
not slow the response.
Unlike other servos, this damping does
It is of considerable interest to note that the
design of this servo need not be a compromise between fast response and
small overshoot, for these qualities occur together in the valve controlled
servo.
Noting that Ir
-
R 2 A3
MaS
,
the effect of each of these variables
on the shape of the response curve can be determined.
Increasing the
load, orifice area, or step displacement of the load decreases 1 linearly
and leads to curves with higher overshoot.
Increasing the lever ratio
between the output shaft and the valve shaft, or increasing the cylinder
area of the ram results in an increase in IT proportional to R2 and A3
respectively, and rapidly leads to curves with less overshoot or none at
all.
The fact that R, a, and A appear in both the time parameter, T,
and the design parameter, 7 , obscures the effect of these variables upon
the time of response.
Their variations not only change the time scale,
but also necessitate a change from curve to curve.
This makes it
14
impossible to generalize accurately upon the effects of changing R, a,
and A; however, in specific applications the effect of changing these
variables can be determined.
in which R, a, A,
For example, a design may be considered
, M, S are chosen in such a way as to make I= 0.018,
and it is desired to know the effect of changing A to some new value, or
changing A, a, and R to new values.
(The effect of varying M and S is
apparent at a glance and need not be discussed here.)
The. dimensional
response curve for Ir = 0.018 is translated into a plot of displacement
as a function of actual time (or
time
if the pressure is unknown).
jpressure
Then, for the new values of R, a, and A the new value of It is calculated
and the dimensionless curve corresponding to this value of Ir is also
translated into terms of actual time.
The two dimensional curves are
compared to determine the effects of the change in design.
Thus, the
dimensionless curves are used to obtain dimensional curves, and it is
these latter plots which are used in the comparison of performances.
If the value of IV falls between the few values used in the dimensionless family of curves, interpolation must be used.
-
I
---
74
~------.-----.-.--.-.--
-----
.----
7Ti2
F7~7fl
v-k'
7 77.
I
AIM
~AJMA]9ThQI
YA~A~S'oF
~:
ALV
-24-
L
.
*I
I
-1MLi<
AMOvKI1T
--
77-
---
rpjt
4-i
1:
-i-
_
LV1f
i
1
1
1
4T,
1 owi:+
I
4
~
V-
Ir
I
Al
IEAqi
~~ 4
F
4
N~#!Lis
~2
_7 -i
g-4
690~J.
INF
+454 -4..~4 41: .7.I.vTT2I~FLr7.f-~plT--T
+~4
8E
~~-j
I
Z
N___
7
V_ fqAL
HE'
.
-
I
'~.LJ__
* 4.
~+:I177:
A~34LS
NfA
Itit
L4
{-
I
4
A
K
I.
.
77.7i~T T::K I.:
7f/
-
1-----:VI -i.I
.ES
I~p~
+
712.t.L.
-
/
4...
*l.
.4
~-4--
..-
L
VTE
727777177
.7
I
~Li I
--
I
.1
fTy-i
I
+
-.-.1
1.
.1~~~~
*4
-
t
4--
+ -
-
r~~-.--4--.--I----.
'I
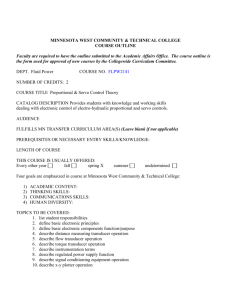
16
Comparison of Theoretical and Empirical
Response Curves
Two theoretical curves were checked; those corresponding
to 1T = 0.128 and to IT = 0.018.
It must be remembered that the two
empirical curves represent a large spread in the operating conditions.
For 7T = 0.128, the load was 97 pounds and the lever ratio 13.1;
for IT = 0.018, the load was 354 pounds and the lever ratio 6.73.
In the general trend towards overshooting the theory checks
excellently with the empirical curves.
In time required for 95 per
cent recovery the theoretical curves are roughly 50 per cent faster
than the obtained curves.
This discrepancy must not be judged too
harshly, in fact, it constitutes as good an
ably be expected or hoped for.
agreement as could reason-
It is enough of an agreement to warrant
a considerable degree of confidence in the theory used and the dimensionless family of response curves arrived at.
In the overshooting curves, the disparity between the rates
of extinction is quite evident.
The oscillation of the actual servo
is far more prolonged than would be predicted by the theory; in fact,
two full cycles were omitted from the empirical curve in order to fit
it on the paper.
This prolonged oscillation should not be considered
as part of the response, but rather as an instability, for it was found
that when the value of Ir was decreased slightly below 0.018 the servo
was truly unstable, and vibrated without ever stopping at the equilibbium position.
It was this instability which made it impossible to
check the response curve for IT = 0.010.
17
Operation of the Apparatus
The design of the servo (see page 38) was found to be quite
satisfactory.
The hydraulic ram operated so well that several of its
design features are hereby recommended for consideration in similar
applications:
The mounting of the moving cylinder upon roller bearing
wheels; the "floating" piston shaft; the self-aligning cylinder head
bushings.
Insofar as leakage out of the system is a criterion, the
assumption of leakless operation was closely met.
There was no deter-
mination made of the leakage across the valve lands or the main piston,
but since these parts were machined to the same tolerances as the
cylinder head bushings, which were leakless, it may be assumed that
the internal leakage was slight.
The friction forces present when the hydraulic ram was under
pressure were not determined.
With no internal pressure, however, the
friction forces were actually negligible.
The servo was unsatisfactory in that it was unstable when its
dimensions were adjusted to produce a 7' of less than about 0.015.
This instability must go unexplained in this thesis, although several
hypotheses are offered on the immediately following pages.
18
Suggestions for Further Work
1.
Introduction of leakage and elasticity, and the stability of
operation:
In the construction of the servo, leakage and elasticity
were kept to a minimum, and in the derivation of the differential
equation of motion the leakage and elasticity were assumed to
equal zero.
These restrictions might be removed, and an attempt
made to express and solve the equation of motion taking leakage
and elasticity into account.
Such an investigation would probably
explain the instability of the servo constructed for this thesis
and establish a criterion for stable operation.
2.
Value of orifice coefficient:
There is reason to suspect that the divergence of the
actual from the theoretical response curves was due to the value
of c, which was taken as 0.6.
The value of c might be redeter-
mined for the sharp edged orifice as such, or else an average
value of c might be determined such that the empirical and
theoretical curves coincide more closely.
3.
Removal of limitations:
The two most serious limitations were the exclusion of
friction and load force, F0 , and the standardization upon square
valve ports.
It would be of interest to investigate the effect
of friction or load force, and the effect of differently shaped
valve ports upon the theoretical and actual response curves.
The servo on which the empirical curves were taken
19
should be tested under pressure to find the friction force present.
If this friction force were appreciable it would partially explain
the fact that the actual response times were greater than calculated
times.
4.
Effect of neglected quantities:
In developing the differential equation of motion, the
term, (f
D
+ nK
-
2 ), was neglected.
c
The first two quantities
represent pressure drops in the line and fittings and the third
quantity arises from the expression for the orifice pressure drop.
Theoretical response curves could be calculated by the same method
used in this thesis, but taking these quantities into account.
It
may be found that their inclusion alters the curves appreciably,
perhaps altering them towards a closer agreement with the empirical
curves.
DIMENSIONAL ANALYSIS
and
SOLUTION OF THE DIFFERENTIAL EQUATION OF MOTION
20
The Equation of Motion in Response to a Step Signal
= Pressure difference maintained by the pump
p
q v-21
f
2
L
=
-
Pressure drop in circuit due to pipe wall friction
d
=
nK
2
Pressure drop due to n enlargements or contractions in
the circuit
a1 2
Iv12
2
(
-
Pressure drop through the two valve orifices
=
1)
Equation of motion for the load:
=
Force
Mass
x
Acceleration
a
I
AL
2
d
2
1)
a0 2
2
a
-F=Md
I
dt2
(1)
Since the system was assumed to be leakless:
vla,
-=
A
dt
=
A dx
Sa, dt
Substituting this valve of v, into equation (1), and dividing through
by M:
-
( a
nK +
+
(p A -F)
(=7
C2a02
d--2 x = pA--
da
M
A3
-
2a
F = 0;
dx 2
(--)
t
a, = (a )m
L
(fd- + n2K
2
Ca
= a:
2 a2
ca a
)
Since, in the Limitations,
(2)
21
Now another simplifying step must be made; the term
(f ! + nK - L-) in equation 2 will be neglected.
D
C2
This is tantamount
to assuming that the pressure drops due to pipe wall friction and due
to enlargements and contractions in the line are negligible compared
to the pressure drops through the valve orifices.
There are several
justifications for this very drastic step:
(1)
form.
It is necessary if the results are to be in a usable
We will finally get the differential equation in terms of three
parameters, and response to a step signal may then be plotted as a
single family of curves.
If the term (f
% + nK --
) were retained,
then four parameters would be necessary in the final equation and the
results would have to be given in the form of a number of families of
curves.
(2)
The fact that (f L + nK) is positive and (c) is nega-
tive, somewhat lessens the magnitude of the neglected quantity.
(3)
Reasonable values might be:
L = 10 feet = 120 inches
d = 3/8 inches
n= 6
In the Notation f, K, and c were given as:
f = 0.02
K = 0.75
c = 0.6
With these values:
- =6.40 +4.50 - 5.55
( + C.
2
=
5.35
22
If the step signal were of such magnitude as to fully open
the valve orifices:
2
2 a2
c2
c2
a2
2
2.
o.36
5.55
Thus, at the start of the response the pressure drop neglected
is of about the same magnitude as the pressure drop retained, but as
2 a--2 2) increases, until
the servo responds and a0 decreases,
the
term
(0
~
c 2a 0
at fifty per cent recovery the term retained is four times the neglected
term.
If the step signal had been smaller, and only opened the valve
halfway, then the retained pressure drop would initially be four times
the neglected quantity, and at fifty per cent recovery, would be 16 times
the neglected pressure drop.
We see that the neglected term may be of importance as the
response starts, but rapidly becomes insignificant as the orifice closes
and most of the pressure drop occurs at the orifices.
Now, luckily, at
the start of the response, when the neglected pressure drop may be a
considerable part of the total pressure drop, the total pressure drop
itself is negligible compared to the applied pressure.
equation (2), (f L + nK -
)
may be large compared to (
it is so only at the start of the response, when ()
recovery, is small.
Referring to
), but
, the velocity of
By the time the servo has reached a high velocity
of recovery, making the pressure drop term significant in comparison
with the -- term, the constant term which was neglected will actually
be negligible.
23
Neglecting the term (f I + nK
ta
2()) a
D
A3
d2 x
2Ma
), equation (2) becomes:
-
dt
c ao
Or:
A3
d2 X pA
dt2
M
Mc
dx21
2
a2(
dt
Now, let h be the length of the sides of the square ports.
Then:
(ao)max = a
2h2
h =7
The initial displacement of the valve spool was, e =
after the step signal was applied.
S
just
U,
When the output shaft has moved a
distance x, the valve spool will have recovered a distance X and the
R
displacement of the valve spool from its neutral position will be
(- - ) = 0 R
R
R
w
The orifice area uncovered by the valve spool equals twice
the height of the ports times the valve displacement:
0
= 2h\2
R
And:
2
a
Substituting this value of a 0
dx
dt2
pA
-
M
AR
-
2
2Mc a
dx
(.)
dt
into equation (3):
1
(S- x)
2
For later use, note that the first term on the right hand
(4)
24
side of this equation is proportional to the pressure difference
maintained by the pump.
The second term is proportional, by the same
constant of proportionality, to the sum of the two orifice pressure
drops; that is, the pressure drop of the oil being supplied to the
cylinder through one orifice, plus the equal pressure drop of the oil
leaving the cylinder through the other orifice.
25
Dimensionless Analysis
R, and S.
,
Equation (4) contains nine parameters; x, t, p, A, a, M,
It would be a hopeless task to show graphically the relation-
ship between x and t for all possible combinations of the other parameters.
is, rewrite the equation in terms of non-dimensional displacement,
.
There is one very obvious and very helpful simplification, however; that
Dividing both sides of equation (4) by S, we get:
Sx
~ MS
2
~
(
dt
MaS
c
X2
(1-
(5)
)
2
da2
, etc. are all dimensionor zIt is true that Z A, or
S A
q
M
less displacements, and it may be thought that they might just as well
.x,
be used instead of the term -.
S
For the present, the choosing of- may
be justified by the fact that it is more meaningful than any of the
x is the displacement of the output shaft, and S,
above alternatives.
the step signal, is the final displacement, so S is the fractional
recovery.
groups.
No such simple meaning can be assigned to any of the other
will be shown that the choice is not only convenient,
Later, it
but necessary.
d X
dt2
=
-,
equation (5) becomes:
1 TA R
pA
--MaS
2c2
MS
--
d2 2
(---)
X2
dt
(
-
Letting X = 1 -
Or:
d2X
--
dt 2
A 3R2
1
2c0
2
MaS
dX 2 1
(-)
dt
i-
x2
pA
iMS
Another simplification is to let the dimensionless group,
SA3R2, be represented by the single letter n . Mas
2c
is not included
26
in this group because c, the orifice pressure drop coefficient, is
The equation now becomes:
assumed to be constant.
d2X =
dX 2 1
dt
dt
2
pA
(6)
-
-
-I
-=-
X
MS
Each term of the equation now has the dimensions of (time)-2.
If we divided the equation through by A, and let T' = dimensionless
the equation could be written as:
x
d--2X
Ir
dX 22
(-X
2c
dT'
= -g
dT2
-
1(7a)
)
time = t
The above step is perfectly logical, and equation (7a) was
almost used as the final form for the equation; it was thought undesirable,
however, to have the step signal, s, appear in all three of the dimensionIn order to eliminate s from the time parameter, multiply
less parameters.
d 2X _
2c
dt
i
or
the last term of equation (6) by
MaS:
(dx)2
1
pA
MaS
dt
X
MS
jA3R2
Or:
dXlt
dt 2
2c2
1_
(f)2
WA2 R2
X2
dt
, and let T
Now, divide through by
=
-
dX
= dimensionless time:
d-
---
(dX)
d~a 2cadT
1
(7b)
X
It appears possible to simplify this equation still further
and express it in terms of only two parameters; dimensionless time and
S2X
--
dT
=
--
2c
Dividing equation (7b) through bylV:
(-)
dT
-
dimensionless displacement.
T
27
Or:
d2-4I
~2
d*
-
=-
(----)
dT2
2c2
Letting X'
--
dT
dT2
S
1
dX1
2c
dT
1
-a- R
TA3R-
(1-)
-
it
d x'
X
2
1
X2
According to this, then, a single curve of Xt versus T will
show the response of servos with all combinations of A, a, R, p, etc.
If equation (8) were integrated, just as equation (7b) will later be
integrated, the plot of (1- x') versus T would look like the plot of
~
.0
------
iT
= 1.
-
-------
X0
AR
Solving for x at (1-X') = 1:
A3R
Ma
2
Solving for x at (1- X') = 0:
-
-
(1- X) versus T for
28
~A 3 R
Ma
-
x = S
2
It is apparent that at (1- X') = 1, any value of x other
than S is meaningless; and at (1- X') = 0, any value of x other than
must
I2 equal
mu s t equal S (
MaS
Ma
unity) if the plot is to have any meaning. Equation (8), then, does
zero is meaningless.
That is,
Ta
not describe servos with any combination of dimensions, but only those
SA3R2
1. To get a meaningful plot for the more general
MaS
case in which I AR2\ 1, equation (7b) must be used.
MaS
The obtaining of equation (8) was perfectly sound mathematicalin which
ly, but the physical phenomenon was lost sight of.
The only dimension-
less displacement parameter which does have a physical meaning is I,
S
the fractional recovery.
29
Solution of the Differential Equation
A solution must now be found for the equation
2
dX
2
(dX)
2c
dT
2
(7b)
1
K
X2 -
dT
All attempts to obtain a formal solution were unsuccessful,
but two solutions were found which permitted the complete mapping of
the above equation.
The two solutions are a Taylor series approxima-
tion, and a step by step solution.
The series solution will be described
first:
Let To, Xo, and (
)
be the values of the dimensionless time,
dT
displacement, and velocity at the start of the interval under consideration.
Then, assume that the curve of X as a function of T can be
X = Ao + A, (T - TO) + A 2 (T - To)
2n
+ ...
+ An (T
-
TO)
+
approximated by a series of the form:
The coefficients of this series are:
n
An
n
dX
n
n :dT T=T0
d n0
The series can now be written as:
dX
X =X, + (fT)o0 (T
T) +
1
d 2X
(-j-)
(TO)
2
+
1
d3 X
(=)
3
T)+...
The successive derivatives of X are obtained by successive
differentiations of equation (7b).
the Appendix.
These differentiations are shown in
There, it can be seen that the derivatives are very long
and cumbersome expressions, so that the obtaining of the coefficients
for equation (9) requires a great deal of arithmetic.
The evaluation of
dl
the derivatives at T = T0 becomes vastly simplified, however, if (-)0 is
zero.
The series solution will only be used, therefore, for the intervals
30
This restriction
of operation in which the initial velocity is zero.
is possible only because the step by step solution works well in the
Before the step by step solution was
other regions of operation.
discovered, it was thought that the series solution would have to be
used for all stages of operation, in spite of the difficulty in evaluating the derivatives when the initial velocity was not zero.
The values of the derivatives at T = T , if ()
= 0:
ddT
(d2X)
d4 X
dT4O
2T 3
2c 2X0 2
(
=6X V4 24- 16
dT 60 2c 2 X0 3
(d 8 ) 0 =
2c 2X 0
5
2
2c X*
d10 X
J
(
540 -888
+ 272
)
2c2 X
(
)21
0
2cX0
20,160-57,696 (
)+41,088
)2
( ITF
6
=
2c 2X
2c2 X0
-
7,936 (-A
)
(-)
dT 10 0
1
2c ~
2c2 X0
J
Substituting these values of the derivatives into equation (9):
X = X -r
(T - TO)2 +
[24 - 16
+ i274
720 2c2X 03
1
g5
40,320 2c2X04
22
(T - T
IT
4
(T - TO)6
2c2X0
F40 -888
L
+ 27
2c2XO
2
]
8
(T-T)
2c2Xo0
)r-+41,9088 ( 1r)2
20,9160 - 57,696 (
IT6
+
2
2
+,2,1
6
95 2c X 0
31628,800 22c X05 [
(2c X0)
31
-7,936
,
+
(T - TO)
(2 csQ
L6
113.4 - 485 (-2cj) + 583
2
- 254 (
+ 35.4 (;r) 4
C 0
(T - TO)
.........
(10)
This is the series solution, and now the step by step solution
will be discussed.
As in the series solution, To, Xo, and Xo will be the time,
displacement, and velocity at the start of the interval over which the
step is being taken; and Tl, X1 , and X1 will denote the values of these
quantities at the end of the step.
Equation (7b) can be written:
dT
2c
di
diX
di
dT
dX dT
dX
X
But:
Now, equation (11) becomes:
2c
dX
X
Or:
dX =
X d X
2c
X
Now, for the short interval under consideration, let X
-
constant = X =
X +X2
2
*.
(12)
Equation (12) then becomes:
= a
-
--
32
1 Xd
-
dX-
2'2
2c X
This equation is integrable as it stands (see A Short Table
of Integrals, B. 0. Pierce, integral number 53).
Integrating both
sides of the equation:
Lx
CP
X 0
-
l (2
2c X )I
xo
Putting in the limits:
-X)=AX=
(X
c V
STr
Dividing through by C
7K
-ln
X
-.. 2c X
X0 2
_ 2c2'X2
and using each side of the equation
as an exponent for e, the base of natural logarithms:
j1 2 - 2czf2
IV
e
-
-
2c2 X 2
Solving for X1 2
X,
X0
2
_
-
-s
2c ZXF
+
2c 2X 2
(13)
c 2P
e
This is the step by step solution.
To, X0 , and io are all known.
At the start of a step,
A value of X, is chosen such that
(Xj - Xo) = AX is not too large (in the calculations, AX was always
chosen smaller than
).
4
Now, knowning X, CiX, Xo, c, and IT the
velocity at the end of the step,
i,
can be calculated from equation (13).
The time taken in going from X0 to X, is:
(Tj - T.) = AT =
AX
Average Velocity
=-
2 AX
.
X, + X0
.
2X)J
I
33
It has just been shown how the final values of time, displacement, and velocity are determined.
For the next step, these
values are considered the initial values.
Use of both the series solution and the step by step solution
is demonstrated in the sample calculations in the Appendix.
34
Stages of Operation
The equation of motion,
dX(
dT
)2
2c2
(7b)
x
as it stands does not apply throughout the entire response.
The open-
ing of the check valves and of the relief valves must be taken into
account by suitable changes in the equation of motion.
equation of motion may take four different forms.
In all, the
The different
stages of operation, their duration, the form of the differential
equation, and the step by step solution for each stage will now be
given.
But first, the significance of the terms in equation (7b)
must be recalled.
In spite of the intervening manipulations, the
terms have the same significance as the terms of equation (4).
the discussion following equation (4)):
2c2
X
1
2X
2c
x
Sum of pressure drops
Applied pressure
And:
2
=
1
Pressure drop through one orifice
4c
x
Applied pressure
Stage I
Relief valves and check valves closed
Differential Equation
d
2
dT
2c 2(X
(See
35
Step by Step Solution
2c2
- io
xl
Z-2
+ 2c X
Duration:
Until the check valve opens.
This occurs when the
orifice pressure drop equals the applied pressure
(see equation (14)):
12
4c
()
4C
=
1.44
Stage II
Relief valves closed, check valves open
Differential Equation
The operating pressure has no effect, and one half of
the pressure drop term must be omitted:
d~
dT
IV
(X)
4c 2
X
2
Step by Step Solution
xXX
1
-
-
e
2cX
Duration
Until the relief valve opens.
This occurs when the
orifice pressure drop equals three times the operating
pressure (see Limitations, number 2).
(-)
x
=
12c2 = 4.32
36
Stage III
Relief valve and check valve open
Differential Equation
Pressure on one side of the cylinder is zero, and on
the other side, three times the operating pressure:
dT
Step by Step Solution
This solution is unnecessary for the simple case of
constant deceleration.
Duration
Until the relief valve closes.
This occurs when the
orifice pressure drop equals twice the operating pressure (the total back pressure equals three times the
operating pressure):
Sc
=
(x)
=
2.88
Stage IV
Relief valves closed, check valve open, servo overshooting
Differential Equation
Only one of the orifice pressure drops is effective, and
the applied pressure now opposes the motion of the piston,
so the sign of the third term must be changed:
dT
S=-(5()
2
4c
X
+I7\
Step by Step Solution
2
2 2
io2 + 2c 2
e
C 2X2
-
-
37
Duration
Until the velocity is zero:
x=0
F
DESCRIPTION OF APPARATUS
38
The Construction of the Servo
At the beginning of this report, the valve controlled servo,
in general, was described and a simplified diagram of its construction
shown.
The apparatus used in this project was built according to that
description, but since many problems arise in translating the simple
diagram into physical reality, some discussion of the construction of
the servo is warranted.
The design of the hydraulic ram is shown on page 41.
Instead
of using a moving piston, the piston is anchored and the cylinder, on
ball bearing wheels, is allowed to move along steel tracks.
In order
to ensure an equal distribution of load on the four wheels, one pair
of wheels is mounted on a pivoted axle.
This gives the cylinder a
suspension with three points of support, rather than four.
shaft is ground, chromium plated, and lapped.
The steel
It bears on long cast
iron bushings (internally ground) in the cylinder heads, and on a
hardened steel bushing within the cylinder.
The heavy cylinder heads
receive the cylinder tube in lead-filled circular slots, and are then
drawn together by four stay bolts which run from head to head.
The servo is loaded by bolting lead plates to the side of the
cylinder, fastening them with studs set in the cylinder heads.
With
the high accelerations encountered in the operation of the servo, it
is important that the center of gravity of the load be very close to
the center line of the shaft if the ram is not to leave the tracks.
The self-aligning feature of the cylinder head bushings is
one of the most interesting points in the design.
The portion of the
cylinder heads within the cylinder are ground to a smooth plane surface.
39
The cast iron bushings are turned and polished with a spherical seat,
and hard babbitt is cast around this spherical seat.
The babbitt cast-
ing is then trimmed down and a plane surface turned on the face opposite
from the spherical cavity.
Now, the bushing can pivot in the babbitt
block, while the babbitt block can slide on the cylinder head.
Three
adjustable compression springs keep the surfaces in contact when there
is no internal pressure present to do so.
The bushings are made self-
aligning in order that they will not bind on the shaft when the cylinder
heads are deformed or displaced by the internal pressure and the forces
exerted by the load.
The drawing shows provision for fixing one of the
babbitt blocks in place, thus attaining two point support for the piston
shaft.
In the actual construction, however, this feature was omitted
without any harmful effect.
The steel bushing in the cylinder offers
sufficient support for the shaft, since the anchored end of the shaft
is free to move vertically and horizontally in the slotted anchor
plate.
The four way valve spool and the valve bore are hardened (and
ground) in order to resist the wire drawing effect of the oil.
The valve
spool is not of one piece, but consists of two hardened washers bolted
to a shaft and separated by a spacer.
The valve bore is made in a steel
sleeve which is pressed into a cast iron valve body.
Where the square
valve ports are located annular grooves are turned in the valve sleeve,
extending almost to the inner bore.
These grooves serve several purposes:
They locate the valve ports; they leave just a small thickness of metal
to be filed out in making the square ports; they connect the two diamet-
rically opposed ports comprising each orifice.
In the four way valve and in the hydraulic ram all
clearances
40
between sliding parts are held to less than two ten-thousandths of an
inch on the diameters.
It was found that a gas filled accumulator in which the gas
and oil were in contact was unsatisfactory.
Under pressure, the gas
dissolves in the oil and then bubbles out when the pressure drops.
For
this reason, an accumulator is used in which the oil is separated from
the gas by a neoprene diaphragm.
In using the apparatus to obtain response curves, the step
signal is imposed by quickly moving the signal shaft to a pre-set stop.
A pencil, attached directly to the ram, traces its displacement on a
tape moving at a known velocity.
Samples of these records are shown in
the Appendix.
The maximum orifice area, a, and the cylinder area, A, are
fixed, but it is possible to vary p, M, S, and R, the operating pressure,
load mass, step signal, and lever ratio respectively.
The last three
variables are chosen so as to give the desired value of the design
parameter, 7
= R2A 3
MaS
TtIL HIYDRAULIC R~A
TC~iNG LOAJD
=J~iInM
~4iZ~L
-~-
-..
42
The Apparatus Assembled on a Base Plate
43
The Hydraulic Ram, Unloaded
44
Piston Shaft and Cylinder Heads
APPENDIX
45
SAMPLE CALCULATIONSCv
ThE. CALCUL-.ATION3
AS AN EAAMPLE)
W"EN ' Y = 0. 0 1 w ILI, NOW DE KaROPue-.-i
ve
FOR rtHfE
ESPONSE
STA&E I
Ar THE srART oF ?He. K~sorsE, THE sERIES SOLUTION
WELL. rHE 3EiEs 50LUT 1,0j EqVATION (,o)
Is :
(T--T.)3
1L
All - 16
+
I.3
-'T
]
rS
[C
+
+
-
+
.
=I.
I
.
WoRKS
1r
&M
-S77
lk- 616
Ic
7-2:
+
2iL
(;cIl
-0o.719
+
7 I-S Y1
G<1
.
+~
Lt*7
WrEN
T
:Tr
Tl-.)
3
(.-3
Ve-
Ir
)1+
( T)
0
1::o
-n- : -o" I
56' T'+
DlPFERENTIATINM.
t
r7T'
WlTH
o' T + q.63 IO
ft:
EC.OM7ES
RE3PECT T6
T + -Z.754
(0 I- 4+).' Irsk)
- .2
-.
I
r7
.
.+
t:
+
OS
--
'-~
.0
co . 8+ 63 +.000
0.68000717
'.o
of
.t~a
fap~
I~*?
P6x'" 7-
+ .
3
-1;)L+(11.1a -A
+ . 6*08o
~i')g~(~b~O
10 +1.oooo
IO~s5f+
+. VOit a + . 0o
14
-a.
r
T
it o'
+(t.
IA . 0001 + - .
+ 1.1
1'1T
?1
oo a-4 +. 0000 70
+ 7
4 x
-''.1)+(-4 I
7
T
)
SOL-?ION
-
3-
.(
.
C :
TtlE SEfIES
O
-4
46
I-.72.
-.lg
oil
,,',),(,
3,
a a..,'t)+(a .ia
00I37 + .000712..
+.0041.+.
s'.s3)+
R.iu)(.4A
+ -OOOI9
*(
.000%.e .+.eO0s1fy...eoo5, 4
-
+. +
-
ria
1 .000112.
.13W+
AS T IS INCKCASED)
THE SEIIES BECOMCS LESS
QVtCK.LY
THE LIMIt of Ftfe VSEFULtNFSs of TtWE 6E!IFE5 SOLUTOPO
CONVERCENT.
rmE
STEP
SoLUTION
pI ITIP
MV6S
6Eutt
X
+
-
Now
AT Tea.
tAC.HED *SOVEI
HAS OEeN
1+.72.
.9
0
~.Wh1ff
p.
p.
T
X.
i.
X.
0
o'
-.
9~4.
(4~~
.a.
.A~o
Ub~t ~
.6V17
040
.,I.,
ow .J#.
.9.
-. oao
,
.oao
'3. 37'w'
r~j .10
,iiji
-09'I.:j
I..,'.
i,
-. oree
.0,,,
STASE
.,6,o
.7t
,.I (.
-:,.30
.o~b4,1
.0019g
*0.90(
.0 1+It
1.041,E
I 2.2.
-.9 2.I
,..'.
-. eIi
49.,
i e ---- y
.1.4
-:,.
.0,
.Dolt
Ar
-. 311
I.e's.
.01 &2t
-9uq . rfos
,il
. 1
W H E N()..
sti
1.015'
-.,130 -V*913
-.
It
.0302,
-.
-.
1.41
i ...
(iA1
1. a
I
.01313L
.oi3
-'.010
0
I.
I
.zIe .aAe -.. 36
92.
iv
I
U.. IE.-ONS
I
I
I
I
STAGE IT
3ri7
rmE
STEP
i
SOLUTION
PoR
47
STAQE
E.
is:
-AI
e*
a .va .
.
I3.-TO
e
.. ai
as
.q
.62 .O(W .01S
1.-S3 .665a . i -00
IS.16i
DS,6
.bsg-
.'2aIf
.o75-
.801
-.
.031(
o.essa
.0sr-
-IS'
01 6t%
*4O'fe
.01370
-0341
*5 -- ,17 .1370 .oS*
. 04 6
..5s
i3.ill
.6e'jql
1113 .*,4A3
1.o42
Ollat
-........
STAGE II
DIPPERENTIAL.
E-QI%?i0N
.=h 3Tr = .03
INITIAL. C.ONDITIONS:
T, : 13 1%
Xe,:.099
THE
tr Tr(a) +
( T2~r
~+
I:
AT
I.e I
I-* too
T
EQUATION
DIFFEMENTIAL
1.
(ar) +I
.os(ir)
-. is4
.OI(A
1
't.1
-.oi vt
8ta 1 I.rl
&-e??-es 3.V1
-ett r9 -. o 9e -. s ,1t
STAG =R N3s WHEN
DR oP3
ro
2. vs
.
INtEffATING
, I'l
-. 1170
- 117
-. 1io
-071
1.0of -01311 -. fl4j
.IWO
W"MR=.2 STAGEF 11 IENDS
THE
oj .1113
.00,17
.,1
3. O
+. l
Z=
STAGE
DIFFERENrIAL
4(22
V(, T
EQVATION:
+-a
-
--
48
&t.g
I
+.
. 061+.
STEp 8t STEP 30LUTION'
+ xel
tc,4 2C
-ax
c
1-.AT-2
yIAI
e~
1is
+-
I.
1.
-. 0I
.o
1
0
t
1,I
. 1 6I
.041
16'.
31.03
.t
I,
AT
-*e717
t30
. cIDV 2.
1.047
-. 010
-. l
-- I
4.
-. ofl
.*207S
16.17. -. 16
-. 030
-. 11
.. 313
-.. 't-O
(-
NoW THAT
DIF'FER.NTIAL
EQUATION
%et44 FIRST TERM
BE NE.LECrTD,
THE
AS
IS
.61+."
SMAL..
AS
RIGHT H~ANo
or, 3(00
.0111s,
.070
AT TMC TOP OF THE PAGE
ON THE
AND
. .0.
-..
'I't~ . Wt I
IOlt
* ,eac
i
. 20 ,0
SIDE
EQUATION WRITtEN
. 00
fo
.o4
A CvLANCE
SHOW5
OF THE
116*3
AT
THAT
EQUATION
THE
THE
MAI
AS:
STu
|twErccpT iNG, AND
Pvrrlwc,
rH E INITiAL
lid
'ntoidT)-.ego
.. r)r
IL
i20
-. aLo
.rag
:s1 10
AT: Z
W"FN
.*
AT.:a,
AT:Z4
t:-.3%
):
THe
1. Oat
.. o?71
'46 q
-. X
FovoTrm STA GtF
is lEpED,
NOW
T'AT
X
CONMDITION3:
(of I
p
M7j
49
THE FINEC.-EVING SAMIPL
AS FAIN As
=0 I Ilf
E CIvERING
IN
FACT
to. A STEP
A14
0
OF
THE
SIGrNAL,
. :.390
THE
OrCATION
SARvO
HAVE
8EEN
PoiN? wnlr_ rHe ov~gqsmooriNGr MAS
rrti
5APAr srACvES
C ALCUtLATlON
MAI
WIrt1
SFRVO
AS
MAVE
P453e3
ACrAIN
JVST
#0W
BE
TD1E
I1ITIAL
BEEN
CoHSIPERCO
C
CPtRAIEO
$ToppD,
rHaOu6H
AA O
rmE
ILIJVS1rRA7O.
A5
PESPOPIN&
~ONDITh.
ZO
-LICE SSIVE-
DIFFERENTIATIONS
50
-- E THI BASIC EQUATION
TME IDIFFLfE?.7ALL P-QUAro1
OFmoTito
is
Tr jx "74-
A
A~xF
;V
'A.~V
amat
L~~a
i'~4rI
(T)
%Aa i
Ra
\4jT1
opoMES:
/1
[z' *A I
~(~3
This E94tm
kN 4
A~Li.1ill3J
12
IL
IA
(9/A,-
t'
+Z*(
qxitAtj]1
44, A
Xq
tdX [4
4
q
(-[
-4 -re
A
()
[
T)
(A)/kL
*
.].
3
I
L
a.
+
(.([r
141
1'
+
+
4
rrj
-X
00
+
4
AL
V
+r
*0
A
l.*j*a ~
KL+
+
' LX -X'
A,'
II
ot'T
.+
2)'[
10.
P
70*
4 -...L
*
4T
4 4
+
2.S
N
1
.11
4].ugJFT94.
+Le
]
4Pr"Al~
y
or~ rri...
esArcCT
it; ?P1E
NwW
*
5 1
id '
.
~
4
ro
ii
PIFEetrtAriom3
~ip
V-7)0
11S rpfd
06C
wirnotJT
m-cLFcCrEP
SECCAL'IE E4Ch TIERM 1
rple itoweK
cFIslr
CcI"rAINIGotL
WrfIr
IS 4f
7EWAS
E %romsoos: F
(~)ARE
IN
LFsts r.IAN
T?1f-
+
EQ~UAL
Iw rfTO
cK
CK
tOwfft
SIMLIFILt' P I~yA'7-ivi
Li Is
--
'iN
TMIESE
WMILL HEKEAFTER
I
4,
.
-rrffS It
IN~ W'fIc"
six, WILL
7-PIF
vrfIC"
TARM3
1
94eAt&
*.isremvmiSPo
-Xv.k'
-T
6
ANYt rnm
TEAa
rsiAM
wtArtE
MAY1
:Si
FROVOCES A TietM
ZERO.
THAN
'rH4
KESUL1S.
?Wjjt.PrpI VeltvArive.
ALI. 4REATER
+f)AAa[ V1'T)
Tte FINAL.
ALL Td6RMI
PIRIV4-Ivf.
oft GftE~rfZ
TO
DIFfEE141IAED)
To A rawti
,IVfC AISF_ To
TnOE
AfoaecTNG,
SaLveMri
t ?t-
CG"1AL VM
To A POWFt(
cervflNINp()
4
Tl1JE
TwCFIrpEAvie
jL
IN rKE LEIG,.TiI DiEAWATIVI
POWER OF
5f( r)
13 EQUAL
*(
oA %otlE4TEA
7ro
A,.
I
~4 T'/
P4CG.4.CY 4LL
V
FIVE.:
at~
L&
1,~o
~a~i.
+
7
OI
-l ~
riifAJ
144 i t~eso -
amiA
~~i
iso'k
Lj
.[A.p~
Prwcl
kar) 1'1
L
+~~j
['
er
00
[_,8_
__!U__
'S
I.Af
14
lit
Eq~'l.
OEK
To
lati
40 +
EQVAL
4"1111
Toi
A
',-o
N9eGrLErr
OR G-IEhAll
+
7SIV
4~AIL
TE9,.-
rKAP4
TrnRg
k; rr)
+
f
xI I
*1160 - C70616
#Wu?
-
~22L~~J
Ea13
5
It
'I
1 ?)S
+ w, off -'t - 7,9 34 K
v
Irl
,
* &A
1 22
*
A
feltz S3.37toq'
toIgo+ 1MSAittO o t +113
I
C40 3%6
I X
+ 1 416I
h
I
3s tfl
*3ii'i4
5,
*141050
0) a *1s'L' 1 I ?(&
.+.z
A* 00 oo -a.30+4., 17
V-s-i
O
VDI
IZ
to
#1
+.
to
Ist -*
i3toe~AL~
rerlTrl DeRlvArpvvE
IS
powefA
M~
I
alo 1;t
I
f
AL
i+
IN' TplE
tHJAN
_
XI
13
1% #6to*I
L-I
G5AEArzot
L I
V'T)
L~(ca ke
+k
1- #,%% I
.i/tI\' k*+v,#O0+ '176
Is I-
2140"k'
xvI]
+Al *.~~
V' 44r/
4
Ii-a.1.s +q1*
rrIA
X6 1' C
qT-
52
?HE
i'4 wHItiN
?6lDbMS
I
'ii'.
+4
a
53
at s qA
1n
,
iN rug
60
-rW.L
NeGLECT
GAEATAR
A*I LI,
Jo
:
o
600-
\4T/+ 3sf ,76
3a.jg7
1V*
THAN
LEO07:t
ALL
reAMS
-Z.t?,4/6
)-I
I.
rme
+17gL
+
+
P+S3,t
-ir;79L
l,t
PEm otivArIvE,
IN vmt 1H
TW O
*1
a+t,
.
(a i-
OF
OEAIVATIVIL,
NEG.LECTi
i l74,71
f36 I + 3Ce
7E EAMS
,-Aj*
coNTAliss tUG
(
.
POWER
ELEVEP47i
*
:M THE
54
Data Used in Plotting Response Curves
Stage
7t=
800
T
1-X
X
.100
.200
.300
.400
.500
.550
.600
.650
.700
.740
.780
.810
-. 805
-. 720
-. 636
-. 551
-. 466
-. 404
-. 361
-. 318
-. 276
-. 238
-. 204
-. 171
-. 148
-. 127
-. 111
-. 093
-. 076
-. 0594
-. 0466
-. 0382
-. 0296
-. 0238
-. 0204
-. 0170
-. 0140
-. 0115
-. 0094
-. 0077
-. 0060
-. 0047
Stage
It =
0.128
T
1-X
2.50
3.00
.387
.544
.628
X
0
.248
.409
.556
.725
.822
.937
1.068
1.215
1.383
1.539
1.760
1.919
2.105
2.251
2.419
2.625
2.862
3.158
3.347
3.583
3.878
4.028
4.209
4.423
4.617
4.853
5.045
5.281
5.575
5.763
.840
.860
.880
.900
.920
.940
.950
.960
.970
.974
.978
.982
.985
.988
.990
.992
.994
.995
3.25
II
I
3.375
3.50
3.60
3.90
4.225
4.635
4.80
5.00
5.27
5.496
6.120
6.404
.669
.709
.735
.825
.900
.950
.960
.968
.975
.980
.990
.992
-.
-.
-.
-.
-.
-.
-.
-.
-.
-.
-.
-.
-.
-.
-.
296
328
232
331
324
316
266
183
075
048
030
025
019
013
002
-9
55
Data Used in Plotting Response Curves
=
Stage
II
T
6.000
6.143
.179
.699
.730
6.281
.760
6.419
6.559
6.564
6.573
.790
6.801
6.903
7.010
7.027
ii~i
IV
1 - X
3.000
6.702
7.427
7.981
7.991
8.058
8.156
8.301
8.490
8.786
9.131
9.919
10.262
10.451
10.648
10.793
10.960
11.109
11.291
11.441
11.623
11.849
12.139
12.326
I7
0.040
.820
=
.018
x
Stage
T
1- X
-. 119
-. 217
-. 218
-.218
-. 216
-. 213
-. 212
-. 212
I
4-08
8.16
9.79
9.95
II
10.09
.150
.594
.844
.869
.890
10.21
.910
10.35
1.930
1.000
1.050
1.060
.821
.823
-. 206
.850
-. 200
.870
-. 1927
.890
-. 1823
.910
-. 1800
.913
.975
-. 1320
1.030 -. 0656
1.031 -. 0642
1.035 -. 0554
1.040 -. 0463
1.046 -. 0366
1.052 -. 0268
1.058 -. 0138
0
1.060
.0264
1.050
.0319
1.040
.0317
1.034
III
IV
10.90
11.39
11.52
11.72
11-79
12.10
12.41
13.00
13.81
15-44
I
1.180
1.150
1.120
18.91
19.26
1.100
1.080
1.070
1.060
1.050
1.040
1.034
1.028
1.024
19.80
.0291
1.017
1.014
.0183
.0146
20.39
1.012
.0121
1.010
1.008
1.006
1.005
.0099
.0078
.0060
.0047
20.63
20.74
20.88
.0219
1.100
1.120
1.150
1.180
1.205
17.93
18.55
19.42
19.61
20.01
II
1.080
17.11
1.028
1.024
1.020
.0260
1.070
20.14
20.28
20.50
21.01
21.19
21.34
1.020
1.016
1.013
1.010
1.008
1.006
1.005
x
-.
-.
-.
-.
-.
-.
-.
0735
1431
1589
1552
1523
1488
1430
-. 1131
-. 0858
-. 0801
-. 0755
-.0716
-. 0637
-. 0569
-. 0452
-. 0300
0
.0300
.0435
.0527
.0570
.0596
.0600
.0505
.0499
.0476
.0435
.0402
.0374
.0338
.0289
.0242
.0182
.0134
.0080
.0053
56
Data Used in Plotting Response Curves
7r
Stage
T
5.
10.
12.
12.31
12.56
12.80
13.05
13.21
13.37
II
13.52
13.70
13.83
III
IV
13.91
13.92
14./+2
14.92
14.975
15.105
15.297
15.497
15.778
16.074
16.552
17.260
19.260
21.260
22.650
25.380
26.572
27.499
28.280
28.805
II
.125
.498
.714
.920
-. 1193
.935
.944
.945
.999
1.045
1.049
1.060
1.075
1.090
-. 1170
-. 1150
-. 1148
.750
1.052
30.542
1.040
1.034
32.832
33.396
1.080
1.060
1.028
1.027
1.003
.986
.985
.982
.978
.974
.968
.964
Stage
I
II
-. 0998
-.0848
-. 0832
-. 0797
-. 0765
-. 0731
1.110 -.0694
1.130 -. 0656
1.160 -.0600
1.200 -. 0530
1.286 -. 0330
1.332 -. 0130
0
1.340
.0283
1.300
1.260
.0388
1.220
.0475
1.180
.0548
1.150
.0594
30.352
32.358
-.0499
-. 0990
.780
.810
.840
.860
.880
.898
1.070
31.925
32.122
X
-. 1167
-. 1191
-. 1209
-. 1220
-. 1229
-.1230
-. 1228
-. 1215
30.070
30.224
31.764
31.794
IV
1 - X
1.120
1.100
31.264
7r = .010 (Continued)
.010
29.295
29.609
29.917
30.642
30.746
30.764
III
=
-0411
.0261
.0252
.0220
.0186
.0154
.0100
.0042
1-X
33.820
34.844
35.355
35.633
35.894
36.089
36.295
36.369
36.531
36.671
36.840
36.982
.963
.968
.974
.978
7r =
Stage
I
T
10.6
21.2
28.2
29.7
30.4
30.7
30.8
II
III
.0628
.0645
.0654
.0652
.0646
.0635
.0611
.0592
.0566
.0561
T
IV
31.1
31.2
31.6
31.8
32.0
32.2
32.2
32.3
32.6
32.7
32.8
33.0
33.1
33.3
33.5
33.9
34.3
34.8
35.8
42.9
50.0
58.6
.982
.985
.988
.989
.991
.993
.994
.995
-.
-.
-.
-.
x
0
0098
0137
0151
0156
-. 0152
-. 0139
-. 0132
-. 0115
-. 0099
-. 0079
-. 0063
.002
1 - X
.1125
.4500
.4987
.881
.923
.945
.949
.966
.974
.990
1.006
x
-. 0212
-. 0424
-. 0566
-. 0595
-.0601
-.0602
1.120
-. 0601
-. 0595
-. 0586
-. 0570
-. 0553
-. 0536
-. 0531
-. 0576
-. 0573
-.0459
-. 0555
-. 0551
-. 0546
-. 0544
-. 0535
-. 0529
-. 0514
1.140
-. 0502
1.170
1.210
-.0488
-. 0459
1.484
1.658
1.735'
-. 0022
-. 0012
0
1.022
1.026
1.029
1.033
1.053
1.058
1.063
1.070
1.080
1.090
1.100
57
\41
---F-
-
I
*1----------0Q'0 1
Sample Tapes Showing Response of Actual Servo
to a Step Signal
-A
58
Curves"
Data for the "Corison
(Empirical versus Theoretical Responses)
Fixed Servo Dimensions:
2
(1.5
Cylinder Area = A
Orifice Area = a = 2 (})
2
)
0.982 inches
2
= 0.125 inches2
Oil Density (Unavis #47)
= 0.868 x density of water
8.13 x 10-5 lb. see. 2 inches~ 4
Variable Parameters:
I=
Pressure = p
0.128
500
Step Signal = S
- = 0.251
386
3.20
Lever Ratio = R
13.10
Mass = M
IT=
0.018
500 psi
lb. sec.
= 0.916 inc
_
inch
386
2
1.68 inches
6.73
Speed of Tape:
6.57 inches
sec.
Several curves were made for each value of IT.
Since the
curves of each set were almost exact duplicates, there was no need of
any averaging process, and the following values were taken from two
tape records selected at random.
The Empirical Curves
_K = 0.018
V = 0.128
Displacement
of the servo
Displacement
of the tape
(x)
(y)
0
.08
.38
.76
1.22
1.60
1.97
2.27
2.59
2.99
3.11
3.12
3.11
3.12
3.14
3.19
3.20 =S
0
.06
.16
.24
.32
.39
.48
.55
.64
.74
.81
.89
1.05
1.20
1.34
1.51
1.68
x
S
_ y _
S6.57
= see.
0
.025
.119
.238
.381
.500
.615
.710
.810
.935
.972
.975
.972
.975
.981
.997
1.000
0
.0091
.0243
.0364
.0486
.0593
.0729
.0835
.0965
.1123
.1230
.1352
.1595
.1823
.204
.230
.255
Displacement
Displacement
x
of the servo
of the tape
S
_y
T
6.57
= sec.
(x)
(y)
0
.08
.32
.72
1.12
1.53
1.68 =S
1.77
1.86
1.88
1.82
1.74
1.68=3
1.59
1.51
1.52
1.58
1.68 =S
1.76
1.80
1.74
1.68=S
1.64
1.60
1.63
1.65
1.67
0
.08
.24
.41
.56
.69
.75
.78
.84
.91
.98
1.04
1.08
1.14
1.21
1.32
1.41
1.50
1.61
1.76
1.92
2.03
0
.048
.190
.428
.666
.910
1.000
1.052
1.108
1.118
1.082
1.033
1.000
.946
.898
.905
.940
1.000
1.048
1.070
1.033
1.000
2.10
.975
2.28
2.38
2.43
2.48
.952
.970
.981
.994
0
.0122
.0365
.0624
.0851
.1050
.1140
.1185
.1278
.1382
.1490
.1580
.1642
.1733
.1840
.201
.214
.228
.244
.268
.292
.308
.319
.348
.362
.370
.378
U'
'0
60
The Theoretical Curves
Dimensionless Time = T =
W=
t = TR A
TR
0.982
)813
x 05
= 0.00102 TR
xX
S
T and (1 -X)
are tabulated earlier in the Appendix:
IT= 0.018
1Y= 0.128
t = (0.00102)
(13.10) T
= 0.01335 T
x 1 - X
t = 0.01335 T
.100
.387
.544
.0167
.0334
.0400
.0434
.0451
.0467
.0480
.628
.669
.709
.735
.825
.900
.0521
.950
.960
.968
.975
.980
.990
.992
.0620
.0565
t = (.00102) (6.73) T
= 0.00686 T
=1 - X
.150
.594
.844
.890
.930
1.000
1.080
1.120
1.205
1.150
.0705
1.000
1.050
1.034
.0734
1.020
.0817
1.010
1.005
.0640
.0667
.0855
t = 0.00686 T
.0280
.0560
.0671
.0692
.0710
.0748
.0809
.0852
.1060
.1230
.1300
.1360
.1380
.1410
.1435
.1462