MEASUREMENTS OF SHEAR-WAVE AZIMUTHAL ANISOTROPY WITH CROSS-DIPOLE LOGS
advertisement

MEASUREMENTS OF SHEAR-WAVE AZIMUTHAL
ANISOTROPY WITH CROSS-DIPOLE LOGS
Guo Tao, Arthur C.H. Cheng, and M.N.Toksoz
Earth Resources Laboratory
Department of Earth, Atmospheric, and Planetary Sciences
Massachusetts Institute of Technology
Cambridge, MA 02139
ABSTRACT
Three methods for analyzing azimuthal anisotropy from cross-dipole logs are applied
to data from the Powder River Basin in Wyoming. These techniques are based on
the phenomena of flexural wave splitting in anisotropic materials and are analogous to
the techniques used for VSP data processing. The four-component cross-dipole logging
data obtained with a Schumberger tool from a vertically-fractured section of 56 m at a
depth of 3550 m are processed with three different techniques. The results demonstrate
that the non-orthogonal rotation method works best for the data. The results from
the linear transform and polar energy spectrum methods are acceptable. The linear
transform processing takes much less computing time, while the polar energy spectrum
method is computationally-intensive.
INTRODUCTION
Laboratory and field observations have demonstrated that, if a formation exhibits shearwave anisotropy, i.e., there is a directional crack system or ambient stress field, the
flexural mode will propagate anisotropically with respect to their polarization direction.
Intuitively, one might expect that a flexural mode polarized along the fast or slow
direction will propagate at zero frequency with fast or slow formation shear velocities,
respectively. This phenomenon could be used to characterize the formation anisotropy
in principle.
A simple mode calculation made by Leveille and Seriff (1989) proved that this is
most likely the case. Further calculations carried out by Ellefsen (1990) and Cheng
(1994) show that in the presence of azimuthal anisotropy, two (quasi-) flexural modes
exist-a slow flexural wave for which the particle displacements are aligned with the
10-1
Tao et al.
polarization of the slow shear wave, and a fast flexural wave for which the particle
displacements are aligned with the polarization of the fast shear wave. Sinha (1991)
also calculated the flexural mode excitation amplitudes in the presence of transverse
isotropy.
Ellefsen (1990) showed that for normal modes propagating along a borehole that is
parallel to the symmetry axis of a transversely isotropic earth model, the shapes of the
phase and group velocity curves are like those for an isotropic model. The phase velocities of these modes do not exceed the phase velocities of the two S-waves propagating
parallel to the symmetry axis. Furthermore, the characteristics of the displacements
and pressures are identical to those for an isotropic mode. The orientations of the two
flexural waves and the two screw waves are arbitrary, just as the polarizations of the
two S-waves propagating parallel to the symmetry axis are arbitrary. For the case of
an orthorhombic model with an intersection of two symmetry planes being parallel to
borehole, the phase and group velocities do not exceed the phase velocity of the slow
qS-wave whose wavenumber vector is parallel to the borehole. The two quasi-flexural
waves have different phase and group velocities, and the differences are large at low
frequencies but small at high frequencies.
Using the perturbation model, Sinha (1991) calculated the flexural wave propagation
characteristics in a liquid-filled borehole in an anisotropic formation. His results for a
slow formation (Austin chalk) that exhibits the symmetry of a TI medium confirmed
that the low-frequency asymptote of the flexural wave velocity merges with the quasi-S
wave velocity for the selected propagation direction and the flexure direction parallel to
the shear polarization directions. The high frequency asymptote of the flexural wave
velocity turns out to be the Scholte wave velocity appropriate for the propagation and
polarization directions. However, his results demonstrated that the difference in phase
velocity between the two orthogonally polarized quasi-flexural waves is essentially independent of frequency under this condition. This phase velocity difference is a maximum
when the TI symmetry axis inclines 90 0 with respect to the direction of wave propagation, and diminishes when the inclining angle becomes less than 45 0 • The frequency
dependence of the amplitude difference for the two orthogonally polarized quasi-flexural
waves is significant in this case. The synthetic waveforms he calculated for dipole sources
directed along the S H" and Sv-wave polarization directions show that, the early arrivals
are dominated by the less dispersive, low-frequency components. His models also show
that waveform amplitudes are significantly larger for the fast flexural wave than for the
slow flexural wave for the same source amplitudes. Finally, the dispersive features of
the flexural arrivals are shown to be quite similar to those calculated for the case of a
liquid-filled borehole of the same radius surrounded by an isotropic, slow formation.
Hatchell and Cowles (1992) described a spectral method for determining the magnitude and direction of shear wave anisotropy in a weakly anisotropic (6 Vs IVs « 1)
formation, using full waveform dipole logging data. Esmersoy et al. (1994) employed
the technique of data matrix rotation, which resembles a method for VSP data processing, to measure the sonic-scale shear anisotropy of a formation with dipole logging
10-2
(
(
(
Anisotropy From Cross-Dipole Logs
data. However, the flexural mode and borehole logging environment are very different
from the VSP application. The dispersion of the flexural mode leads to a frequency
dependence in amplitude which could mix with the effects attributed to anisotropy and
lead to possible errors in interpretation. Further studies are necessary to identify the
conditions under which VSP methods can be applied to dipole logging data processing.
In this paper, we examine three methods for determining the anisotropy parameters
with a cross-dipole data set from ARGO's Red Mountain Well in the Powder River Basin
in Wyoming. The data are from a depth interval of 56 m (185 ft) that was proved by
other independent information (FMI/FMS) to be full of vertical fractures and therefore
expected to demonstrate transversely isotropic (TI) properties.
BRIEF DESCRIPTION OF THE THREE METHODS FOR
DETERMINING SHEAR-WAVE ANISOTROPY IN VSP SURVEYS
Definition of Anisotropy Parameters and Basic Assumption
Acquisition Geometry
Figure 1 shows a schematic diagram of a fluid-filled borehole of radius a. The surrounding formation exhibits the symmetry of a TI medium whose symmetry axis (Z) is
normal to the borehole axis (Z'). This is analogous to the anisotropy in the earth caused
by stress-aligned, fluid-filled inclusions uniformly distributed between the transmitter
and receivers.
Figure 2 shows the coordinate system with the origin at the transmitter or receiver
plane. We assume that there is no angular misalignment between the transmitter and
receiver section of the tool. Two orthogonal dipole transmitters, designated T 1 and
T 2 , are located at the same depth and on the axis of a vertical circular borehole. Two
orthogonal dipole receivers, Rl and R2, are located on the axis of the borehole a distance
L away from the transmitters. In the case of an array of receiver pairs, the distance
between transmitters and each receiver pair is designated as L 1 , L 2 , etc. The angle
between the fast and slow shear wave polarization directions and the dipole T 1 on this
plane is designated as 81 and 82 , respectively.
The basic assumptions behind these VSP methods for anisotropy measurements are
as follows:
1. Homogeneous anisotropy. The polarizations of quasi-shear waves do not change
with depth within the medium between source and receiver sets.
2. Polarizations of the split shear waves. The polarizations of split flexural waves
are fixed for a given raypath direction. This implies that the angles 81 and 82 are
invariant over a time window that covers a specific shear wave arrival.
3. Principle of superposition. It is always assumed that a source vector F with
response polarization function F(w, t) can be decomposed into two components,
10-3
Tao et al.
F l andFz, along the PI and Pz directions with response functions F l (w, t) and
Fz(w, t), respectively. The wavefield excited by source vector F in the medium is
equivalent to the wavefield excited simultaneously by F l andFz.
Basic Relationship
''lith the above assumptions, the following essential equations can be formulated:
Fl(w, t) = -F(w, t)cose2fsin(e z - ell
Fz(w, t) = F(w, t)cosedsin(ez - ed.
(1)
Two principal time series qSl(t) and qsz(t) are then defined to facilitate and quantify
the anisotropy measurements. The qSl(t) is referred to as the fast split shear wave and
is defined as the time series which results when the receiver and a source vector Fare
both polarized along Pl. Similarly, the qSz(t) is the slow split shear wave which is
the time series generated when the receiver and a source vector F are both polarized
along pz. Two transformed time series VI (t) and Vz(t) are introduced as the sum and
difference, respectively, of the principal time series qSl(t) and qsz(t):
Vl(t) = qSl(t) + qsz(t)
Vz(t) = qSl(t) - qsz(t).
(2)
(
(
(
According to the principle of superposition as shown Figure 2, the Tl-source (Xdirection)can be decomposed into two components. The amplitudes of the fast and
slower split shear waves excited by Tl can thus be expressed as:
qSl(t)sin(ez)/sin(ez - ell
-qsz(t)sin(el)/sin(ez - ell·
(3)
respectively. Similarly, the amplitudes of the fast and slower shear waves excited by the
T z are:
-qsl(t)cos(ez)/sin(e2 - ell
qsz(t)cos(el)/sin(ez - ell·
(4)
Now the four component time series Sij(t) recorded from T l and Tz -sources (j
at R l and R z receivers (i = 1,2) can be written as:
sn(t) = [qsl(t)sin(ez)cos(el) - qsz(t)sin(edcos(ez)lIsin(ez - ell
S21(t) = [qsl(t)sin(ez)sin(el) - qsz(t)sin(el)sin(ez)lIsin(ez - ell
sdt) = [-qsl(t)cos(ez)cos(ed + qsz(t)cos(el)cos(ez)lIsin(ez - ed
szz(t) = [-qsl(t)sin(el)cos(ez) + qsz(t)sin(ez)cos(el)]/sin(ez - ell·
10-4
= 1,2)
(5)
(
Anisotropy From Cross-Dipole Logs
These are basic relations between the recorded components and the principal time series
of split shear waves. For the case of flexural waves, the same relations could be derived
if the basic assumptions are also applicable to dipole logging. This is an important point
when techniques originally used in VSP data processing are to be extended to dipole
logging data processing.
Three Methods for Determining Principal Time Series and Anisotropy
Directions
We need to determine qS1(t) and qS2(t) and e1 and e2 from the recorded time series Sij(t)
in order to determine the anisotropy parameters. There are three time domain methods
developed primarily for VSP data processing which are available. The rotation scanning
technique first developed by Alford (1986) and Thomsen (1988) and refined for dipole
logging data processing by Nolte and Cheng (1996); the linear-transform technique developed by Li and Crampin (1993); and the polar energy spectrum method to determine
anisotropy directions, proposed by Igel and Crampin (1990). These techniques will be
analyzed and examined with the data from dipole logging in a TI formation.
Rotation Scanning Technique
Assuming the two split flexural waves are orthogonally polarized, let e1 = e2 - IT /2 =
e, and combining the equations 2 to 5, the solution for the principal time series is
straightforward:
qS1(t) = coS 2(e)Sl1(t) + sin(e)coS(e)[S21(t) + sdt)] + sin 2(e)sn(t)
qS2(t) = sin 2(e)Sl1(t) - sin(e)coS(e)[S21(t) + sdt)) + cos 2(e)sn(t)
(6)
and
0= sin 2(e)S21(t)
+ sin(e)coS(e)[Sl1(t) - S22(t)] - coS 2(e)S12(t)
0= sin 2(e)sdt) + sin(e)coS(e)[Sl1(t) - S22(t)) - coS 2(e)S21(t).
(7)
Equations 6 and 7 can be calculated for a sequence of values of e, the value chosen
for the final e is that for which the linear combination of data on the right-hand side
of equation 7 is approximately zero at all times for the whole traces. This angle is
then used in equation 6 to determine the principal time series. Nolte and Cheng (1996)
present a method that is able to handle the case of non-orthogonally polarized waves
and, moreover, is computationally more efficient than Alford's technique. Their method
is based on the eigenvalue decomposition of an asymmetric matrix and a least-squares
minimization of its off-diagonal components. In the case of orthogonally polarized waves
their method will yield exactly the same results as Alford rotation. In this study, the
results of applying the method of Nolte and Cheng (1996) are employed for comparison.
10-5
Tao et aI.
Linear Transform Technique
Li and Crampin (1993) introduced a set of linear transforms to the four component data
sets:
i
Dl(t) = Sll(t) - S22(t)
D 2(t) = S21(t) + sdt)
D 3 (t) = Sll(t) + S22(t)
D4(t) = S12(t) - S21(t).
(8)
Combining this equation with equations 2 to 5, we have:
Dl(t)
D 2 (t)
D3(t)
D4(t)
=
[qSl(t) - qS2(t)]sin(82 + 81)/sin(82 - 81 )
[qs2(t) - qSl(t)]cos(82 + 8Il/sin(82 - 81 )
qSl(t)+qs2(t)
[qSl(t) - qS2(t)]cos(82 - 81)/sin(82 - 81 ),
(9)
By introducing another time series,
(10)
then equations 9 can be written:
Dl(t) = U(t)sin(8 2 + 81 )
D 2(t) = -U(t)cos(82 + 81 )
D 3 (t) = U(t)sin(8 2 - 81 )
D 4(t) = -U(t)cos(8 2 - 8Il ·
(11)
This equation shows that U(t) is linear motion in coordinate system (Dl, -D2) and
(D3, -D4), with angle 82 + 81 to the Dl axis and 82 - 81 to the D3 axis, respectively.
Therefore, we can uniquely determine U(t), 82 , and 81 , Consequently, Vl(t) = qSl(t) +
qS2(t) and V2(t) = qSl(t) - qS2(t) can be calculated from the four component records
Sij' In practice, this is achieved by first estimating the covariance matrix of D l (t) to
-D 2(t) and D 3 (t) to -D4(t), then 82 + 81 and 82 - 81 can be calculated. Finally, the
two principal time series are calculated using equation 2.
Polar Energy Spectrum
Igel and Crampin (1990) introduced a technique for identifying shear wave polarizations
when the data has been recorded with more than one source orientation. This technique
yields direct information about the shear wave splitting and allows the polarizations of
the split shear waves to be recognized in the presence of interference which leads to elliptical particle motion. This method, which is analogous to optical experiments, measures
10-6
l
Anisotropy From Cross-Dipole Logs
the polar energy as a function of polarization after propagation through formations. For
two fixed orthogonal directions are taken in the medium
a given source polarization
with components of the recorded displacement vector, x(e, t) and y(e, t),· measured in
the coordinate system in Figure 3. Let Xl(t), Yl(t) and X2(t), Y2(t) be the displacements
for the two source orientations e1 and e2, respectively. When e1 - e2 = 90 0 , as in the
case of dipole logging, the displacements become:
e,
x(e, t) = coste - e1 )Xl(t)
+ sin(e -
e1 )X2(t)
y(e, t) = coste - e1 )Y1(t) + sin(e - e1 )Y2(t)
(12)
The instantaneous direction of the displacement vector in the horizontal plane is
q,(e, t) = tan- 1 (y(e, t)/x(e, t))
(13)
where both q,(e, t) and e are specified between 00 and 180 0 • For a given source orientation
e, seismic energy is sorted in the time interval t2 - tl as a function of displacement
direction q, between 0° and 180 0
F(e, q,) =
L'2 E(t, q,k, e)
(14)
'I
where E(t, q,k, e) is the seismogram energy at time t for direction q, in the interval
q,k - 6.q, :": q,k + 6.q, for source orientation e. F(e, q,) is calculated for 0° :": e :": 180 0 in
1" steps, representing the full range of possible source orientations. F(e, q,) ranges over
a square array of bins, where the elements correspond to relative total energy associated
with polarization direction q, as a function of source polarization. Sums of energy, E, for
each displacement direction q, for all calculated source orientations e, are determined,
and the directions of the two maximum values of E are selected as the two principal
directions.
180 0
E(q,) =
L
0=0
(15)
F(q"e).
0
Summary
Three methods for analyzing azimuthal anisotropy from VSP data are described. These
techniques are applied to dipole logging data processing, based on the similarity between
phenomena of shear wave and flexural wave splitting in anisotropic materials. All these
methods use four component measurements. The linear-transform technique needs less
computation and can handle the case of non-orthogonal splitting of shear waves, if there
are two orthogonally polarized transmitters and receivers available and their alignments
are perfect. The requirement for the alignment of source and receiver could be relaxed
10-7
Tao et al.
if the fast and slower flexural modes are orthogonally polarized. The rotating data
matrix technique is computationally intensive. The development of Nolte and Cheng
improved this rotation technique in both computational efficiency and applicability to
non-orthogonal splitting cases. The polar energy spectrum method may be robust in
picking up polarization direction and hence the directions of principal anisotropy axes.
It is also computationally intensive.
CROSS-DIPOLE LOGGING DATA USED IN THIS STUDY
Figures 4 and 5 show a section [15.24 m (50 ft) from depth 3521 m to 3536 nil ofthe crossdipole waveform from one cross-line and one in-line measurement of receiver number five
and the upper source. Figure 6 shows the logging tool azimuthal orientation recorded
for the same section, and the variation of travel times of the first (solid line) and second
(dashed line) dipole in-line measurements at equal-offset receivers. These times are
obtained by picking an early zero crossing in the waveforms. Because the tool orientation
changes by about 180 degrees in this section, the cross-component amplitudes go through
minima at around 3529 m and 3534 mm, and the waveforms change sign on either side
of these minima. This is consistent with an azimuthal anisotropic model. The data set
used in this study is from a section of about 56 m (185 ft) in depth, and consisting of
four components at seven-receiver positions. The data from receiver number four is not
usable, probably due to instrument problems.
RESULTS OF APPLYING PROCESSING TECHNIQUES TO THE
DATA SET
To compare the three techniques, we first apply them to a small portion of the data
set. Afterwards, the results from processing the whole data set are examined. Figure 7
shows an 8 m section of the cross-component waveforms in a time window from 1.5 ms
to 4 ms. The two minima can be seen more clearly along with the waveform change on
either side of these minima. Figure 8 shows the four component waveforms at receiver
five for shot number 165 taken from the smaller section in Figure 7.
As discussed by Nolte and Cheng (1996), the Schlumberger dipole tool has two
sources which are spaced 0.152 m (0.5 ft) apart from each other. As a result, when data
are collected with this tool the components for the x-source are not exactly aligned
with those of the y-source since the tool has moved by 0.152 m in depth between the
source firings. This movement is usually accompanied by a rotation by some angle 'Y.
In this study, before we determine the polarizations we always correct for this effect.
Figure 9 shows the crossline component energy as a function of rotation angles for the
4-component waveform from shot 165 in Figure 8. It has been noticed that the energy
minima of the two components are shifted by one degree. The two minima of E yx are
at -67 0 and 23 0 , respectively.
10-8
Anisotropy From Cross-Dipole Logs
Results From the Linear Transform Method
The linear transform is first applied to the four component waveforms for shot 165. The
results are presented in Figure 10. The time window was chosen with width 0.8 ms
starting from 1.96ms. The waveforms shown are the principal time series obtained by
this method. The angle 0: (in degrees) printed on the figure is the orientation of the
upper source relative to the two principal anisotropy directions calculated with this
technique. The angle do: printed on the figure is the orientation difference between
the two sources due to the fact that they are at different depths. The td value is the
time delay of the slow flexural wave. Changing the time window does not improve the
results. This initial test demonstrates that the linear transform method gets acceptable
results for this case. Figure 11 presents the two principal waveforms obtained by the
linear transform for receiver number five. Figure 12 shows the strike direction 0:, the
differences of azimuthal orientation between the two cross-dipole sources, and the travel
time of the two principal flexural waves calculated from the 8 m section shown in Figure 7
(using six receivers) by this technique.
Results From the Non-Orthogonal Rotation Methods
Figures 13 to 15 show the results of applying non-orthogonal rotation to the same data
set. The principal time series obtained are shown in the same way as in the Figures 10
to 12. These results are better than those obtained by the linear transform method.
Results From the Polar Energy Spectrum Technique
Figures 16 to 18 are the results from the polar energy spectrum method for the same
data set. This technique is actually a method to find the principal directions by rotating
the source and receiver separately. An additional advantage of this method is that it can
tell if the sources are aligned with the receivers, and if there is any vertical variation of
anisotropy within the formation between the source and receivers. The 0:3 and 0:4 values
in Figure 18 show the source orientation relative to the principal directions determined
by this technique. From the principal waveforms in Figure 17, it can be seen that there
is an abrupt time shift at depth 3533.5 111. There is no direct way to check such an
inconsistency. It is probably due to a miscalculation caused by interferences in the field
measurements.
DISCUSSION
Because there is no absolutely objective way to check the results obtained by applying
the three techniques to the ARCO dipole logs, only consistency and the variance of
the data between all the receivers can be used to compare the techniques. It should be
noted that the time window selection could have significant effects on the data processing
results.
10-9
Tao et al.
CONCLUSIONS
We have examined three methods for analyzing azimuthal anisotropy with cross dipole
logging data from an anisotropic formation. These techniques, which were originally
developed for VSP data processing, are based on the phenomena of flexural wave splitting in anisotropic materials. From the point of view of consistency and the standard
deviation of the results from different source-receiver sets in the anisotropic section, the
non-orthogonal rotation method works best. The linear transform technique also yields
acceptable results, and has the advantage of using minimal computer time. The polar
energy spectrum method is relatively sensitive to noise.
ACKNOWLEDGMENTS
(
We thank Dr. Keith Katahara of ARCO Oil and Gas Company for providing the data.
We are grateful to Dr. Bertram Nolte for his tremendous help in preparing the logging
data and providing related information. This research was supported by the Borehole
Acoustics and Logging Consortium at ERL, the ERLjnCUBE Geophysical Center for
Parallel Processing, and DOE Contract #DE-FG02-86ER13636.
I
10-10
Anisotropy From Cross-Dipole Logs
REFERENCES
Alford, RM., 1986. Shear Data in the Presence of Azimuthal Anisotropy. 56th S.E. G
Annual Meeting Expanded Abstracts. Houston, TX.
Barton, C. and Zoback, M., 1988. Determination of in situ stress orientation from borehole guided waves. J. Geophys. Res., 93, 7834-7844.
Ellefsen, K. J., 1990. Elastic wave propagation along a borehole in an anisotropic
medium. Ph.D. Thesis, Massachusetts Institute of Technology, Cambridge, MA.
Esmersoy, C., Koster, K., Williams, M., Boyd, A. and Kane, M., 1994. Dipole shear
anisotropy logging. 64th SEG Annual Meeting Expanded Abstracts. Los Angeles.
Hatchell, P.J. and Cowles, C.S., 1992. Flexural borehole modes and measurement of
shear-wave azimuthal anisotropy. 62nd S.E. G Annual Meeting Expanded Abstracts.
New Orleans, LA.
Igel, H. and Crampin, S., 1990. Extracting shear wave polarizations from different source
orientations: Synthetic modelling. J. Geophys. Res., 95, 11283-11292.
Kanasewich, E.R., 1981. Time Sequence Analysis in Geophysics. University of Alberta
Press. Third Edition.
Lefeuvre, F., Cliet, C. and Nicoletis, L., 1989. Shear-wave birefringence measurement
and detection in the Paris Basin. 59th SEG Annual Meeting Expanded Abstracts.
Dallas, TX.
Li, X.Y. and Crampin, S., 1993. Linear-transform techniques for processing shear-wave
anisotropy in four component seismic data. Geophysics, 58, 240-256.
Nolte, B. and Cheng, C.H., 1996. Estimation of non-orthogonal shear-wave polarizations
and shear-wave velocities from four component dipole logs. M.LT. Borehole Acoustic
and Logging and Reservoir Delineation Consortia Annual Report.
Sinha, B. K., Norris, A. N. and Chang, S. K., 1991. Borehole flexural modes in anisotropic
formations. 61st SEG Annual Meeting Expanded Abstracts. Houston, TX.
Thomsen, L.A., 1988. Reflection seismology over azimuthal anisotropic media. Geophysics, 53, 304-313.
10-11
Tao et al.
X
/!. Z'
Z
- -->
Anisotropic Solid:
Y' (SV)
Cll, C13, C33, C44
C66
p2
Fluid pI
(
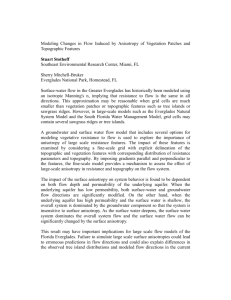
Figure 1: Schematic diagram of fluid-filled borehole of radius a. The surrounding
formation exhibits the symmetry of a TI medium whose symmetry axis Z is normal to
the borehole axis Z'.
10-12
Anisotropy From Cross-Dipole Logs
<f
X
~
X
pI'
FI
Y
pI
F
Y
T2
p2",
F2 ",
p 2' '.l.
~
Figure 2: The coordinate system with origin at the transmitter or receiver plane, We
assume that there is no angular misalignment between the transmitter and receiver
section of the tool. Two orthogonal dipole transmitters, designated T 1 and T z , are
located at the same depth and on the axis of a vertical circular borehole, Two orthogonal
dipole receivers,Rl and R2, are located on the axis of the borehole a distance L away
from the transmitters.
10-13
Tao et al.
(
Figure 3: Coordinate system and azimuthal anisotropy directions in the polar energy
spectrum model.
10-14
Anisotropy From Cross-Dipole Logs
Dipole waveforms from AReO (Uo2-RS)
3524
D
E
3526
p
T
H
(m)
3528
3530
3532
3534
3536
o
2
3
4
5
6
7
8
9
10
Time (ms)
Figure 4: A section of the cross-dipole waveform (15.24 m or 50 ft from depth 3521 m
to 3536 m), recorded from one cross-line measurement with the upper dipole source.
10-15
Tao et al.
Dipole waveforms from ARea (Ui2-R5)
352 2
~ ~~
~
~~
~
~
~
"'"
I
3524
~
~
D
E
--'
352 6
P
---'.
T
H
(m)
352 8
~
353 0
~
-
3532
-
-
- -
3536
o
-
-
3534
2
II
3
4
5
6
7
8
9
10
Time (ms)
Figure 5: A section of the cross-dipole waveform (15.24 m or 50 ft from depth 3521 m
to 3536 m), recorded from one in-line measurement with the upper dipole source.
10-16
Anisotropy From Cross-Dipole Logs
Tavel Times of Inline Measurements
Orientation of Logging Tool
3522
3522
~
-1i2
3524
3524
D
3526
E
p
T
\
\
\
,,
3528
,,
(m)
\
3530
3530
3532
,,,
,,
\
3526
H 3528
,
,
,,
,,
,,
I
I
3534
3534
0
100
200
300
400
Azimuth (degree)
1.5
I
I
\
,,
,
2
2.5
Time (ms)
Figure 6: Dipole logging tool azimuthal orientation (left) recorded for the same section
as in Figure 4, and the variation of travel times of the first (solid line) and second
(dashed line) dipole in-line measurement at equal-offset receivers (right).
10-17
Tao et aI.
Subsection of Dipole waveforms (Fig.4)
3530
n
E
3531
p
T
II
3532
(mJ
3533
3534
3535
3536
1.5
2
2.5
3
3.5
Time (rns)
Figure 7: Cross component waveforms from an 8 m section in a time window from 1.5
ms to 4 ms.
10-18
Anisotropy From Cross-Dipole Logs
4-Component Dipole waveforms at 3526 m (Shot 165)
upp~rinlillc
o
2
4
6
Time (ms)
8
10
Figure 8: Four component waveforms from receiver number five at shot 165 taken from
the section in Figure 7.
10-19
Tao et al.
Crossline Component Energy versus Rotation Angles for Shot 165
4
(
- - cross line-x
3.5
- - crossline-y
3
2.5
0
~
.~
c. 2
E
<:
1.5
0.5
20
40
60
80
100
120
140
160
180
Angle (degree)
(
Figure 9: Crossline component energy as a function of rotation angles for the four
component waveforms from shot 165 in Figure 8.
10-20
Anisotropy From Cross-Dipole Logs
Principal Time Series and Strike Angles from LT for Shot 165-R5
-1
E
1
,
0
~
,
0
:[-1
- -
I I
I
,
I I I
E
."
~If-
m%688
{a'~1=
0
qs2
-1
0
2
3
4
5
6
7
9
8
10
Time (ms)
Crossline Components after LT for Shot 165-R5
-1
ex
ey
1
,
0
~
0
,
•
:[-1
~
E
."
31f=
19.99
0
-1
0
2
3
4
5
6
7
8
9
10
Time (ms)
Figure 10: The results of applying the linear transform method to the four component
waveforms of shot 165. An 0.8 ms time window was chosen starting from 1.96ms.
The waveforms shown are the principal time series obtained. The angle a: (in degrees)
printed on the figure is the orientation of the upper source relative to the two principal
anisotropy directions calculated with this technique.
10-21
Tao et al.
QS2 by Linear Transform (from Fig.?)
QSl by Linear Transform (from Fig.7)
3529
3529
3530
3530
3531
3531
113532
3532
II
E
P
T
(Ill)
3533
3533
3534
3534
3535
3535
3536
3536
1.5
2
2.5
3
3.5
1.5
Time (ms)
2
2.5
3
Time (ms)
Figure 11: The two principal waveforms obtained by the linear transform method for
receiver number five.
10-22
Anisotropy From Cross-Dipole Logs
Polarization alfi
3522
Tavel Times of QSl & QS2
aln-alCZ
3522
3522
?~,
~
3524
3524
(
~ 3526
3524
(
3526
,,,•
,
~
3526
-.- .
.~
,
,
p
T
~
3528
3528
3530
3530
3530
3532
3532
3532
3534
3534
3534
H 3528
(m)
0
Azimuth (degree)
200 -200
0
Azimuth (degree)
,
.',,
I
I
,«
I
\
I
,
~
-200
,
,,
200
1.5
>•
2
2.5
Time (ms)
Figure 12: The principal direction ct (left), differences of azimuthal orientation between
the two cross dipole sources (middle) and the travel times of the two principal flexural
waves calculated from the sub-data section in Figure 7 for 6 receivers by linear transform.
10-23
Tao et at.
Principal Time Series and Strike Angles from NR for Shot 165-RS
5
•
E
, I I I I
0
I
-5
0
2
-qs1
qs2
1
--
\
,"
I
~
~
E
<:
,
, ,,
,"
, , ,,
, ,, ,•
~
•,
~
"
(
I
3
4
27.86
0.2
alf=
"
td=
5
6
7
8
10
9
Time (ms)
Crossline Components after LT for Shot 165-RS
B
5
(
- - cy
•
E 0
C.
,
~
\
E
<:
alr=
-5
0
2
3
4
5
6
27.86
7
8
9
10
Time (ms)
Figure 13: The results of applying the non-orthogonal rotation method to the four
component waveforms of shot 165. An 0.8 ms time window was chosen starting from
1.96ms. The waveforms shown are the principal time series obtained. The angle 0: (in
degrees) printed on the figure is the orientation of the upper Source relative to the two
principal anisotropy directions calculated with this technique.
10-24
Anisotropy From Cross-Dipole Logs
QS2 by Non-Orthogonal Rotation
QSl by Non-Orthogonal Rotation
3530
3530
3531
3531
113532
3532
n
E
p
T
(m)
3533
3533
3534
3534
3535
3535
3536
3536
1.5
2
2.5
3
1.5
3.5
2
2.5
3
3.5
Time (ms)
Time (ms)
Figure 14: The two principal waveforms obtained by the non-orthogonal rotation
method for receiver number five.
10-25
Tao et al.
Tavel Times of QSl & QS2
Polarization
3522
3522
,,
,~
,
~
3524
3524
~ 3526
3526
H 3528
(m)
~
I ::-__"""'_
-.:-"";:
(
~
',
I
P
T
,,
3528
,,
J
,,
J
3530
3530
','
I
3532
3532
I
,
I
,
\
3534
3534
I
I
•
-200
-100
0
100
200
1.5
2
2.5
Time (ms)
Azimuth (degree)
Figure 15: The principal direction", (left), the differences of azimuthal orientation
between the two cross-dipole sources (middle), and the travel times of the two principal
flexural waves calculated from the data in Figure 7 (using 6 receivers) by the nonorthogonal rotation method.
10-26
Anisotropy From Cross-Dipole Logs
x 10-4
Principal Time Series and Strike Angles from PE for Shot 165-R5
1.5 F--r--.,........:~:-~--r--.:...-r-----.r---r-;=:'::::::::;1
-qs1
1
i
0.5
- - qs2
\ ,
o!------J.\'1', , , ,
0.
E
<: -0.5
alfi=
td=
-1
30
0.16
-1.5l...-_......_ - r ._ _....._ - ' - _ - ' - _ - - ' ' - - _ - ' - _......._ - - '_ _ou
o
2
3
4
5
6
7
8
9
10
Time (ms)
X .10-4
Crossline Components by PE for Shot 165-RS
1.5
1
OJ
3'a
0.5
01--....._-"""\:>9\
E
<: -0.5
-1
-1.5L-_-'-_....._ - ' - _ - - '_ _....._ - ' - _......_ - ' - _ - - '_ _u
7
8
9
10
o
2
3
4
5
6
Time (ms)
Figure 16: The results of applying the Polar Energy Spectrum method to the four
component waveforms of shot 165. An 0.8 ms time window was chosen starting from
1.96ms. The waveforms shown are the principal time series obtained. The angle a (in
degrees) printed on the figure is the orientation of the upper source relative to the two
principal anisotropy directions calculated with this technique.
10-27
Tao et al.
QS2 by Polar Energy Spectrum (from Fig.?)
QSl by Polar Energy Spectrum (from Fig.?)
3529
3529
3530
3530
3531
3531
113532
3532
n
F.
P
T
(Ill)
3533
3533
3534
3534
3535
3535
3536
3536
1.5
2
2.5
3
1.5
3.5
2
2.5
3
Time (ms)
Time (ms)
Figure 17: The two principal waveforms obtained by the Polar Energy Spectrum method
for receiver number five.
10-28
Anisotropy From Cross-Dipole Logs
\
'\
I
..., ....
-....
'- ....."'....--
\
,
-
'
~
.,;
°
I
~
°
_ _......
--'
......
-J..
-L.
.....
w
m
w
w
w
w
w
~
~
W
N
IV
m
m
m
m
~
~
-'-_..J
w
m
N
,....----'-;:------'i"r-----'O;:----....:;"',....----''''1'-----;-=-----''''r--.,
-'
~'-----L----L.--......---L----L.---......- -......-
°
b;'-
......
....L.
......
.....
....1
--JL-
......
L-_.J
Figure 18: The principal direction a (left), differences of azimuthal orientation between
the two cross-dipole sources (middle), and the travel times of the two principal flexural
waves calculated from data in Figure 7 (using 6 receivers) by the Polar Energy Spectrum
method.
10-29
Tao et al.
(
(
(
(
(
(
10-30