Recommendations for the Design of ... Concrete Structures S.
advertisement

Recommendations for the Design of Ultra-High Performance
Concrete Structures
by
Ricardo S. Davila
Bachelor of Science, Massachusetts Institute of Technology (2006)
Submitted to the Department of Civil and Environmental Engineering
in partial fulfillment of the requirements for the degree of
Master of Engineering in Civil and Environmental Engineering
at the
MASSACHUSETTS INSTITUTE OF TECHNOLOGY
June 2007
©
2007 Massachusetts Institute of Technology
All rights reserved
The author hereby grants to MIT permission to reproduce and
to distribute copies of this thesis document in whole or in part.
Signature of Author..... . . . . . . . . . . . . . . . . . . .
Department of Civil and Environmental Engineering
May 11, 2007
Certified by ..................................
Franz-Josef Ulm
Professor of Civil and Environmental Engineering
Thesis Supervisor
Accepted by...............................
MASSACHUSETTS INSTT1JTE
OF TECHNOLOGY
JUN 0 7 2007
LIBRARIES
Daniele Veneziano
Chairman, Departmen tal Committee for Graduate Students
Recommendations for the Design of Ultra-High Performance Concrete
Structures
by
Ricardo S. Davila
Submitted to the Department of Civil and Environmental Engineering
on May 11, 2007, in partial fulfillment of the
requirements for the degree of
Master of Engineering in Civil and Environmental Engineering
Abstract
New materials frequently require modifications or rewrites of existing construction codes. They
may also need new methods for their manufacture and installation. DUCTAL, a new ultrahigh performance concrete (UHPC) with enhanced tensile, compressive, and deflective behavior
offered by LaFarge, is one such material, and current guidelines for concrete do not sufficiently
account for these improved properties. Research by other universities and professional
institutions has produced sequential recommendations, beginning with the experiment-based
set from the Association Frangaise de Genie Civil (AFGC) through the analytically-based set
from MIT.
In this thesis, the MIT approach is further developed into a coherent method for hardened
UHPC design. The first two sections familiarize the reader with the analytical model for UHPC
and the evolution in design codes and their philosophical bases. Essential concepts, such as
the two-phase matrix-fiber behavior of the material and the use of a maximum crack width
criterion to govern design, are explained. Next, the most current design guidelines are presented
in full, with attention paid to bending and shear resistance. Comparisons with previous codes
demonstrate the ability of these guidelines to produce more structurally efficient sections which
consume less material. Analysis of the recommendations themselves will demonstrate the
existence of a size effect and the cross-sectional parameters that affect structural efficiency
most. Optimization based on the one-dimensional analytical model closes with an analysis of
different cross-sections for their structural efficiency, span-to-height ratios, required prestressing,
and amount of material consumed.
The one-dimensional model is then extended to three-dimensions, providing the framework
and relations needed to perform non-linear finite element analysis. Practical consequences of
the differences between the 1-D and 3-D models allows for the proposed MIT guidelines to be
validated and their safety ensured. A dynamic analysis of a box section optimized according
to the proposed guidelines is then performed with the aid of the 3-D model, and the results
demonstrate its safety. Overall, the reader shall be given an outline of how to design for
hardened UHPC.
Thesis Supervisor: Franz-Josef Ulm
Title: Professor of Civil and Environmental Engineering
2
Contents
1
2
1.1
Industrial Context . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
1.2
Research History and Significance
1.3
Motivation and Objectives for Current Research
1.4
Outline of Thesis
. . . . . . . . . . . . . . . . . . . . . . . . . . 12
. . . . . . . . . . . . . . . . . . 13
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
17
Analytical Model of Hardened UHPC
2.1
2.2
3
10
Introduction
UHPC Material Model
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
. . . . . . . . . . . . . . . . . . . . . . . . . . . 18
2.1.1
1-D UHPC Think-Model
2.1.2
Constitutive Relations
2.1.3
Thermodynamics
2.1.4
Energy Transformation During the Brittle-Plastic Fracture
2.1.5
Summary of 1-D Parameters
. . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
. . . . . . . . . . . . . . . . . . . . . . . . . 26
Chapter Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
Prior Recommendations for Hardened UHPC Design
3.1
. . . . . . . . 24
The AFGC Recommendations
28
. . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
. . . . . . . . . . . . . . . . . . . . . . . . . . 29
3.1.1
Behavioral Characteristics
3.1.2
Heat Treatment
3.1.3
Structural Design Recommendations Overview
3.1.4
Behavioral and Safety Factors
3.1.5
Characteristic Length . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
3.1.6
Constitutive Law for Serviceability Limit States
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
. . . . . . . . . . . . . . . 32
. . . . . . . . . . . . . . . . . . . . . . . . 33
3
. . . . . . . . . . . . . . 34
3.2
3.3
3.4
4
3.1.7
Constitutive Law for Ultimate Limit States . . . . . . . . . . . . . . . . . 36
3.1.8
ULS and SLS Shear . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
The MIT Recommendations
1-D Section Design Formulas . . . . . . . . . . . . . . . . . . . . . . . . . 40
3.2.2
Limit States Design Criteria
3.2.3
Optimization Procedure . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
Rte. 624 over Cat Point Creek
. . . . . . . . . . . . . . . . . . . . . . . . . 44
. . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
3.3.1
Design Principles
3.3.2
Section Strength Moment Capacity
3.3.3
Determination of Prestressing Strands . . . . . . . . . . . . . . . . . . . . 53
3.3.4
Shear Capacity of Section . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
. . . . . . . . . . . . . . . . . . . . . 51
Chapter Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
58
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
4.1
Design Method and Criteria
4.2
Comparisons and Analysis of Design Method
5.2
. . . . . . . . . . . . . . . 61
Comparison Against AFGC Recommendations
4.2.2
Comparison Against Previous MIT Method . . . . . . . . . . . . . . . . . 70
4.2.3
Exploration of Size Effect . . . . . . . . . . . . . . . . . . . . . . . . . . . 73
4.2.4
Sensitivity of Design Method . . . . . . . . . . . . . . . . . . . . . . . . . 79
Optimization According to Proposed Methods
. . . . . . . . . . . . . . . . . . . 85
Comparison of Different Cross Sections
. . . . . . . . . . . . . . . . . . . 85
Chapter Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 93
95
3-D UHPC Modeling
5.1
. . . . . . . . . . . . . . . . . . . . 61
4.2.1
4.3.1
4.4
40
3.2.1
Proposed Method of UHPC Design
4.3
5
.............................
........
3-D UHPC Model
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 96
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 97
5.1.1
3-D Isotropy
5.1.2
3-D Strength Domain
5.1.3
Consistency with the 1-D Model
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 97
. . . . . . . . . . . . . . . . . . . . . . . 103
Differences Between 1-D and 3-D Behavior
5.2.1
. . . . . . . . . . . . . . . . . . . . .111
Modeled Section Behavior . . . . . . . . . . . . . . . . . . . . . . . . . . .111
4
5.2.2
6
Moment-Curvature Behavior
. . . . . . . . . . . . . . . . . . . . . . . . . 112
. . . . . . . . . . . . . . . . . . . . . . 1 14
5.3
Validation of Proposed Design Guidelines
5.4
Dynamic Analysis
5.5
Chapter Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1 19
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 116
121
Conclusions
. . . . . . ..
6.1
Summ ary of Thesis
6.2
Suggestions for Future Research
. . . . . . . . . . . . . . . . . . . . . . . . . .121
. . . . . . . . . . . . . . . . . . . . . . . . . . .123
5
List of Tables
2.1
Input parameters of the 3-D UHPC model and typical values for DUCTALTM
derived from a notched tensile plate test.
4.1
. . . . . . . . . . . . . . . . . . . . . . 26
Recommended values for DUCTAL material parameters according to AFGC
recom m endations [4] . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62
4.2
Optimized web height, prestress, and efficiencies for the current MIT and AFGC
methods. ...........
4.3
Calculated load distribution factors for the box, double-tee, and girder crosssections...........
5.1
68
........................................
..........................................
Mode shapes and frequencies for a 16-ton truck. [5]
6
89
. . . . . . . . . . . . . . . . 118
List of Figures
2-1
Typical stress-crack width response of a UHPC material, obtained through a
notched tensile test. [3]
2-2
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
Graphical representation of the 1-D think-model for a two-phase matrix-fiber
com posite m aterial. [3] . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
. . . . . . . . . . . . . . 21
2-3
Stress-strain response of the two-phase think model. [9]
2-4
Sources of energy dissipation in the think model from matrix fracture and the
activation of the friction element, kM [3]: (a) Dissipated fracture energy; (b)
Dissipated friction energy; (c) Total dissipation. . . . . . . . . . . . . . . . . . . . 25
3-1
The simplified stress-crack width law for tensile behavior [4] . . . . . . . . . . . . 31
3-2
Stress-strain relationship for service limit state according to AFGC recommendations [4] . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
3-3
Stress-strain relationship for ultimate limit state according to AFGC recommendations [4] . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
. . . . . . . . . . . . . . . . . 41
3-4
Idealized bending behavior in the cross-section.[8]
3-5
Sketch of discretized cross section used in design and analysis. W is the effective
slab width of the deck, if it is included . . . . . . . . . . . . . . . . . . . . . . . . 43
. . . . 62
4-1
Plot of the stress-crack width relationship for a variety of specimens. [1]
4-2
Variations in
4-3
Comparison of the SLS and ULS stress-strain response in tension according to
e1 % and
lim for different values of the total section height, H.
. . 63
AFG C guidelines. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
4-4
Tensile stress-strain response for the AFGC ULS and MIT methods. . . . . . . . 65
7
4-5
Sketch of the two-holed box section girder. . . . . . . . . . . . . . . . . . . . . . . 67
4-6
Stresses in the cross section according to AFGC and MIT design methods for
the serviceability lim it state.
4-7
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 68
Stresses in the cross section according to AFGC and MIT design methods for
the ultim ate lim it state. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69
4-8
Comparison of the total section heights obtained with the current MIT design
method with those reported by Ms. Park. [8]
4-9
. . . . . . . . . . . . . . . . . . . . 71
SLS bending and shear efficiencies for both the current and previous MIT
methods versus span length, L. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72
4-10 Efficiencies obtained if: (1) only the web height is allowed to vary; (2) if the web
height, web width, and number of prestressing tendons may vary.
. . . . . . . . 73
4-11 Size effect inherent in the AFGC recommendations for prestressed, reinforced,
and unreinforced UHPC. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75
4-12 Size effect inherent in the current MIT recommendations for prestressed,
reinforced, and unreinforced UHPC.
. . . . . . . . . . . . . . . . . . . . . . . . . 75
4-13 Comparison between the size effects according to the AFGC and MIT recommendations for unreinforced UHPC.
. . . . . . . . . . . . . . . . . . . . . . . . . 76
4-14 Comparison between the size effects according to the AFGC and MIT recommendations for prestressed UHPC. . . . . . . . . . . . . . . . . . . . . . . . . . . 78
4-15 Comparison between the size effects according to the AFGC and MIT recommendations for reinforced UHPC. . . . . . . . . . . . . . . . . . . . . . . . . . . . 78
4-16 Sensitivity of ULS and SLS bending efficiency to changes in top flange width. . . 80
4-17 Sensitivity of ULS and SLS bending efficiency to simultaneous and equal changes
in top and bottom flange widths. . . . . . . . . . . . . . . . . . . . . . . . . . . . 80
4-18 Sensitivity of ULS and SLS bending efficiency to changes in web width.
. . . . . 81
4-19 Sensitivity of ULS and SLS bending efficiency to changes in top flange depth. . . 82
4-20 Sensitivity of ULS and SLS bending efficiency to simultaneous and equal changes
in top and bottom flange depth . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82
4-21 Sensitivity of ULS and SLS bending efficiency to changes in the number of
prestressing tendons. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 84
8
4-22 Sensitivity of ULS and SLS bending efficiency to changes in web depth.
. . . . . 84
4-23 Drawings of the different cross-section types analyzed. From left to right: doubletee, girder, box section.
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 85
4-24 Sketch of how (a) double-tee and (b) box sections are split into equivalent girders
for LDF calculations. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 89
4-25 Average efficiencies for different section shapes. . . . . . . . . . . . . . . . . . . . 91
4-26 Span length, L, to total section height, H, for different section geometries. . . . . 91
4-27 Volume of UHPC consumed for optimized sections versus span length. . . . . . . 92
4-28 Amount of prestressing required for different optimized sections versus span length. 92
5-1
UHPC strength domain in the E_. x Eyy plane (Ezz = 0) [3]
5-2
Biaxial composite matrix strength domain in the
5-3
[
Biaxial fiber strength domain in the aFzz X aF,yy plane.3
5-4
Uniaxial stress-strain response for the macroscopic, matrix, and fiber stresses [9] 104
5-5
Plot of the 1-D and 3-D uniaxial stress-strain response. [9]
5-6
Results obtained from finite element results for normalized ULS live load versus
0
. . . . . . . . . . . 98
M,xx X am,yy plane. [3]
..
..
. . . . 100
.. . . .
100
. . . . . . . . . . . . .111
normalized maximum plastic strain of section obtained through 1-D optimization.
[8]
5-7
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 113
Results obtained from finite element results for normalized ULS live load versus
normalized maximum plastic strain after further optimization. [8] . . . . . . . . . 113
5-8
Bending moment versus curvature for 1-D and 3-D sections of identical geometry. 114
5-9
Deformed shape of two-holed box section according to finite element simulation.
115
5-10 Distribution of strains on the surface of the box section. Plastic tensile strain at
midspan = 0.00145
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 115
5-11 Deflected shape of box section for first fundamental mode.
5-12 Deflected shape of box section for second fundamental mode.
5-13 Deflected shape of box section for third fundamental mode.
9
. . . . . . . . . . . . 117
. . . . . . . . . . . 117
. . . . . . . . . . . . 118
Chapter 1
Introduction
1.1
Industrial Context
As a class of materials, concrete is one of the most versatile on the planet. It is relatively
inexpensive, can be formed into any shape, and its material properties may be altered by
tinkering either with the matrix chemistry or the type of aggregate used. Each of these alteration
processes are relatively simple, and so a new class of materials may be created with little extra
manufacturing infrastructure.
Ultra-high performance concrete (UHPC) is a highly-specialized form of concrete that
enhances all the recognized benefits of standard concrete. A different chemical composition
and heat treatment cause its elementary particles to be more tightly-packed. This increases
its toughness, which makes UHPC extremely resistant to fire, radiation, and damage. Water
and air also do not penetrate, since the tighter packing creates less pore spaces and drastically
reduces capillary action, so steel reinforcement is well-protected and requires less cover. For a
structural engineer, this means that UHPC is stiffer and can reach compressive strengths equal
to that of mild structural steel.
Additionally, UHPC makes use of microscopic fibers, typically steel, which have profound
effects on the material's behavior. Because cement bonds so well to the fibers, the material
can now accommodate tensile stresses, which improves its behavior in tension and bending.
These fibers also help resist shear, so that traditional steel shear reinforcement is unnecessary.
Although primary failure in tension is still attributed to matrix cracking, it is neither brittle nor
10
catastrophic, since the fibers assume the load and strain. Continued failure is thus attributed
to the de-bonding of the matrix from the fibers, which is a slow process akin to that of plastic
behavior. The end result is that the material is far more ductile than its older cousins, which
allows it to be used in more critical or performance-sensitive structures and applications. Most
notably, the use of superplasticizers means that all these benefits may be achieved without
losing workability.
Increased performance comes at a price, however. Intensive refining processes make it quite
expensive, though we expect that it will become cheaper as time passes. One may also make
a case that, through life-cycle costing, the material is cheaper overall since it requires far
less maintenance and has roughly double the useful life of conventional concrete. In UHPC,
engineers have the potential to use a powerful new material, but are at a loss when it comes
to design. Since UHPC can carry tension without the use of standard reinforcement, a more
efficient design method will make use of this added capacity, perhaps enhanced by prestressing.
With a plastic failure mechanism activated after matrix cracking and governed by the bonding
between the fibers and the matrix, we must focus on performance-based criteria instead of
standard strength-based ones for design.
The obvious question is, if UHPC is so difficult and lacks the same support infrastructure and
material characteristics as, for example, steel, then why should we care about using it? First,
the manufacture of steel itself is a very refined process, which consumes a lot more energy and
produces far more greenhouse gases than that of UHPC. Second, powerful computer technology
has inspired architects and engineers to break away from traditional design methods and section
profiles. Custom sections in UHPC are much easier to create than with steel, and the need for
UHPC to be pre-cast therefore becomes a non-issue. Third, the material has extremely high
durability built-in, which steel in its untreated form does not come close to. Fourth, it delivers
high strength and performance for comparatively low weight, yet is not as exotic as carbon
fibers or other similar materials. Indeed, UHPC is a material that can perform for today's
architectural and engineering needs, and is well-suited for a variety of future applications.
11
1.2
Research History and Significance
Much research has been done on UHPC in order to understand its behavior on as many levels
as possible. From a macroscopic perspective, say at the level of a bridge girder, one may relate
performance to a set of design codes that account for uncertainty in material strength and
plasticity, fiber orientation, the probability of applied loading cases, and the importance of the
design scenario. Stress-strain and other relations may be derived from empirical analyses, as
has been done for many years with concrete, steel, and many other materials. As we will see
later, this is the approach of the Association Frangaise de Genie Civil (AFGC).
Another approach has sought to derive macroscopic effects from phenomena at the
microscopic and even the nanoscopic scale. This approach, known as micromechanics, is based
on continuum mechanics, and is highly analytical as opposed to the empirical approach to
understanding materials.
So, while such detail invariably requires much more time, in the
end one may achieve a far more thorough and intellectually pleasing understanding which
arguably better informs engineering intuition. The resulting framework may be easily modified
to include mechanical effects arising from chemistry (chemo-micromechanics), phenomena in
the pore space (poro-micromechanics), and temperature (thermo-micromechanics).
At MIT, the focus has been on such analysis and correlating it to real-world performance.
Under the guidance of Professor Franz-Josef Ulm in conjunction with other professors and
researchers, including Luca Sorelli, Marcos DeJesus, Dr. Eugene Chuang, Hesson Park, Melvin
Soh, and JongMin Shim; various theses explaining the behavior of UHPC, exploring the
operation of the derived material model at different levels of abstraction, and suggesting
methods of implementation in design have been produced.
The first in the series was the
2002 doctorate thesis of Dr. Chuang, entitled "Ductility Enhancement of High Performance
Cementitious Composites and Structures."
This comprehensive work gave a thorough
presentation of the derivation of constitutive relations and the final material model for UHPC. It
is furthermore a prime example of the scaling from microscopic considerations to macroscopic
effects.
Next came Ms. Park's 2003 masters of Science thesis, "Model-Based Optimization
of UHPC Highway Bridge Girders" accompanied by Mr. Soh's masters of engineering thesis
"Model-Based Design of [an] Ultra High Performance Concrete Prototype Highway Bridge
Girder." These two combined represent the next step in the analysis process, that of applying
12
the material model derived by Dr. Chuang to the real-world design of structural members.
Included are a validation of Dr. Chuang's model via the comparison of real-world testing data
to finite-element simulations, as well as a recommended design procedure, design examples, and
the exploration of changes in different section and design parameters. Rounding out this group
is a distilled and straightforward version of Ms. Park's recommended procedure in a 2005 white
paper written by Professor Ulm for the Department of Transportation of the State of Virginia,
"UHPC Design for Route 624 Over Cat Point Creek." It should be noted that the section used
is a relative of the Bulb T sections recommended by the American Association of State Highway
Transit Officials (AASHTO) for standard concrete.
1.3
Motivation and Objectives for Current Research
All this research is necessary for the wider adoption of UHPC in structures, but in its present
state there is too much information spread about to be helpful to the everyday structural
engineer. S/he needs a manual that will present exactly what elements and criteria are necessary
for design and provide clear examples of implementation. Each step in the design process must
proceed in a logical manner, so that even though the general form of design is identifiable, the
engineer is not lost in the details of UHPC-specific behavior. Finally, there should be included
a means for the engineer to extend the design method suggested herein, so that individual
creativity in and investigation of application and form may proceed.
This requires ample
technical background information from previous work be made available to the public in either
notation or appendix form.
Understandably, this thesis is not the "LRFD Manual" for UHPC structures.
document requires far more time and research than was available here.
Such a
Given that both
marketing and research focus have been on using UHPC in highway bridge girders, this thesis
will continue along that path. Design procedure and examples will therefore be tailored to
using UHPC as a beam material, with concentration on shear and bending.
The final product is a presentation to the structural engineer of the latest information
available concerning the design and behavior of ultra-high performance concrete girders. S/he
shall have available a tested and proven design method for hardened concrete girders, as well as
13
an understanding of how the method is applied. After reading through, the engineer should have
a clear understanding of how UHPC is different from other cementitious composite materials
and how to use it in structural design.
1.4
Outline of Thesis
A clear design method must be presented in an equally clear manner. Thus, this thesis is
organized into six parts:
Chapter 1 is the introduction, which appeared above.
Chapter 2 introduces the one-dimensional analytical model for UHPC, developed at MIT
according to linear elastic fracture mechanics. A think-model, idealized as a set of springs,
brittle elements, and friction elements, is introduced to aid in the conceptualization of UHPC
micromechanical behavior. Analysis of the microscopic (internal) stresses and strains of this
model combined with the balance of mechanical energy allows one to relate the internal behavior
to the macroscopic (observable) stresses and strains.
This analytical model, its material
parameters, and the resulting macroscopic stress-strain curve dictate the one-dimensional
approximation of the material, and form the basis for the MIT design procedures for hardened
UHPC. At the end, the engineer should have a good idea of the stress-strain relationship outlined
by the analytical model and the relationship between microscopic and macroscopic behavior.
Chapter 3 traces the evolution of design recommendations for UHPC. We begin with the
recommendations of the AFGC, which existed before the analytical model was developed.
Important developments include the use of maximum crack width criterion to limit stress
capacity, which is a performance-based limit as opposed to a typical strength-based limit.
Also important are their methods to check for shear capacity, which is largely unchanged in
later recommendations. In order to ensure conservativism in design, they use the characteristic
stress-strain relationship, which is further reduced in the ultimate limit state by a partial safety
factor.
We then move on to Ms. Park's research, which is the next evolutionary step in design
procedure.
With the analytical model developed by Dr. Chuang and Professor Ulm now
available, she revised the AFGC recommendations to exploit this new understanding of the
14
material's stress response. As a result, the crack criteria is modified, and safety factors are
applied to the calculated section capacity instead of directly to the stress-strain plot. These
elements are still in use in the current method.
The third work to be reviewed is the last of the evolutionary steps in procedure: Professor
Ulm's white paper to the Virginia Department of Transportation for the Cat Point Creek
bridge. Its design philosophy is based largely on the work of Ms. Park combined with the
AFGC shear criteria, and clearly presents the design limitations on shear and bending. Of note
are the calculations of safety factors in the form of capacity reductions in shear and bending,
and the use of material constants from the analytical model in combination with the AFGC
shear formulas. These elements are also included in the current guidelines to UHPC design. By
this point, the reader should be cognizant of the evolution of design methods for UHPC and be
aware of where the current recommendations come from.
Chapter 4 explores the current MIT design method and an example of its application.
Criteria for bending and shear in the service limit state and ultimate limit state are outlined
along with the formulas they require. New is the definition of efficiency factors and an efficiency
function: efficiency factors are defined as the ratio of factored loading to factored capacity, and
the efficiency function is a sum of the squares of the differences of the calculated efficiencies from
the ideal (equal to one). Also new are an exploration of the sensitivity of calculated efficiency
to changes in cross-section parameters and an identification of a size effect.
The current guidelines will then be compared against the AFGC and previous MIT
recommendations to gauge the benefits brought by the new design guidelines.
For the
comparison with the AFGC method, this includes comparing the dimensions of the sections
designed according to each method for the same loading conditions and examining the stresses
and strains in the cross-sections. With the previous MIT method, the comparison identifies the
gains in efficiency and decreases in cross-section height brought about by the new method.
Finally, a comparison of different cross-sectional shapes using the current MIT design
guidelines serves as an example of the method's application.
Three cross-sections are
optimized, and their average efficiencies, total heights, volume of required material, and required
prestressing force versus span length are compared side-by-side. At the end of this chapter, the
reader knows the current MIT design recommendations and is familiar with efficiency factors.
15
S/he will also understand the sensitivity of the design guidelines to changes in cross-sectional
parameters, as well as what it means for the guidelines to have a size effect. Finally, s/he will
see the differences between designs produced according to the current method versus previous
ones as well as how the current method may be applied.
Chapter 5 moves into the realm of three-dimensional modeling, which is necessary for
finite element simulations that verify the behavior of the structural element optimized with
the one-dimensional design method. This three-dimensional analytical model builds upon the
one-dimensional model, where isotropy is assumed and stresses and stiffnesses are replaced
by their higher-dimensional counterparts.
As this model has been previously validated by
tests performed by the Federal Highway Association (FHWA), it can be trusted to accurately
represent the real-world behavior of an UHPC element. Differences between the calculated
moment-curvature response of the one-dimensional and three-dimensional models are explored,
as well as how a design according to the current MIT methods is conservative according to
finite element analysis.
recommendations.
This detail will be used to justify the safety of the current MIT
On a final note, the results of a dynamic analysis are presented, which
show that the optimized section is sufficiently stiff to handle expected loading frequencies.
After this chapter, the reader will understand how the analytical model is extended to three
dimensions, and have an idea of the safety of the current MIT method and how an optimized
section is sufficiently resistant to dynamic loading.
Chapter 6 contains the overall conclusions.
Developments and results are summarized,
providing the reader with a review of what has been learned. Additionally, suggestions for
future research associated with UHPC materials are included.
16
Chapter 2
Analytical Model of Hardened
UHPC
For any common construction material, there exists an understanding of its stress-strain
response, typically presented in the form of an idealized graph. Steel, for instance, follows
an elasto-plastic behavior, where after an initial elastic range the material yields and deforms
permanently. Likewise, a model is necessary in order to design UHPC structures. This chapter
begins with a one-dimensional (uniaxial) formulation in order to give a clear idea of the idealized
internal behavior. The engineer is therefore introduced to the essential analysis of a think-model,
which is the foundation upon which the current crop of design recommendations rests. The key
lesson here is the link between micromechanical phenomena and the macroscopic stress-strain
response, so that the engineer may construct the idealized one-dimensional stress-strain plot
from a set of material parameters supplied by the material manufacturer.
2.1
UHPC Material Model
To be of any use to the engineer, a material model must be accurate. Yet an overly complexified
model is of no use either, because while it may be accurate, the amount of parameters will be too
overwhelming to be practical. A good approach would be to take the average of the microscopic
effects in the material and relate them to a few macroscopic variables. Fortunately, the field of
continuum mechanics gives us the tools to do so and derive an intuitive think-model.
17
10.0
8.0
$
6.0
(D9
0 4.0-
Z0)
L-
2.0 -
0.0
0
0.05
0.1
0.15
0.2
0.25
0.3
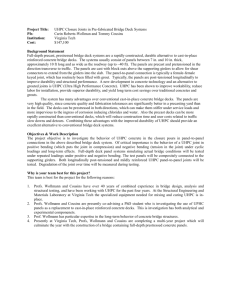
Displacement [mm]
Figure 2-1: Typical stress-crack width response of a UHPC material, obtained through a
notched tensile test. [3]
2.1.1
1-D UHPC Think-Model
The think model focuses on the macroscopic scale, which is what would be measured in a
standard engineering stress-strain diagram. Such a diagram for a typical sample of UHPC in
a strain-driven tensile test is presented in Figure 2-1. We see immediately that the material is
characterized by an initial elastic stage, followed by a sudden stress drop and the activation of
a strain hardening stage. The stress continues to rise along this secondary slope until yielding
occurs, after which softening continues until complete failure at some ultimate strain occurs.
One immediately may deduce the action of two separate phases which only work in a composite
manner once the primary one has failed.
Chuang and Ulm [3] proposed the two-phase think model in Figure 2-2, which consider the
matrix and the fibers as largely separate entities with a certain degree of compliance between
the two. An elastic spring (stiffness CM) and a brittle-plastic crack device (fracture strength
18
E
CM
CF
Mk,
ft)
p
Figure 2-2: Graphical representation of the 1-D think-model for a two-phase matrix-fiber
composite material. [3]
ft, frictional strength kM) model the behavior of the cementitious matrix. Fiber behavior
follows an elasto-plastic law, described by an elastic spring (stiffness CF) in series with a
friction element (strength
fy).
Additionally, the two elements are coupled by an elastic spring of
stiffness M, which links the irreversible matrix strain (strain ep ) with the irreversible fiber strain
(strain
erF).
Thus, the composite material behavior may be described by these six parameters:
Cm, CF, M, ft, kM, fy.
2.1.2
Constitutive Relations
The macroscopic stress E may be considered the sum of two composite stresses
OM and
UF,
which represent the stresses in the matrix and the fibers, respectively:
E
=
UM + 0-F
19
(2.1)
where:
E
CM + CF
am
CM
UF
CF
E is the total strain,
-CM
- (Cm
E
-CF
M)
E
M
M
-(CF
+M)
(2.2)
eF
E& is the permanent matrix strain activated after the opening of the
fracture element, and e' is the permanent fiber strain associated with plasticity. Following
equilibrium, the composite stresses are constrained by two loading functions:
F(UM, JM) = max(fM(0M), fF(0F))
0
(2.3)
Initial elasticity is defined by:
fM (M) = aM - (ft + kM)
fFUF)
kF
=
-
(2.4)
fy
(2.5)
while the loading and unloading conditions are defined by Kuhn-Tucker conditions after matrix
cracking:
aM- kM < 0; Em > 0; (aM- kM)E
=O
(2-6)
The stress-strain response of this model is presented in Figure 2-3. The following observations
may be made:
1. In the initial elastic range (eP =
EF = 0), the overall elasticity is governed by the initial
composite stiffness Ko = CM + CF for
F(aM, aM) < 0 - E = (CM + CF)E
(2.7)
The matrix will crack first provided that:
CF
C=
<
CM
____
y
=P
ft+kM
If this condition is satisfied, then the onset of cracking occurs for El
20
(2.8)
=
(ft + kM)/CM,
AO(CWCF)
t,2
EtI
f +k
-
Fiber Stress
CI
..........
=Ffy
Matrix Stress
...........-
amy =km
Figure 2-3: Stress-strain response of the two-phase think model. [9]
which corresponds to the following composite stress state:
-=(1+
EP (El)- = 0;
I
K)(ft + km)
o- = ft + km
= s(ft + km)
aF
(2.9)
2. For a strain-driven experiment, the permanent strain and composite stress read immediately after cracking:
{
1F+=-
eP (E)+
C
0+
ft
CM +M'
21
=
0
-
= 0-+
-
-
CM
ft
=
I
ftC+M'f
k
kM
CM+M ft
(2.10)
After cracking, the permanent matrix strain evolves by:
dE M = CMCM
dE
+M
(2.11)
and the composite stresses by:
KjdE; daM = 0
dE = dcYF
(2.12)
where K 1 is the secondary stiffness:
C2
K1 = CM +CF
M
(2.13)
3. The ultimate sustainable macroscopic stress in tension is:
E2= kM ± fy
(2.14)
and is reached, again under strain-driven conditions, when:
kmM + fy (CM + M)
CMM+CF(CM+M)
Beyond which point the material is perfectly plastic, which formally means:
dE'm = dEF
=
dE; dE = daF
dUM = 0
Thus the aforementioned six model parameters (CM, CF,
M, ft, kM,
(2-16)
fy)
may be
determined from the macroscopic stress-strain response of the material, i.e. from the stiffnesses
KO and K 1 , the stresses
2.1.3
E-, EF, and E2 , and the strain E1 .
Thermodynamics
From the stress-strain analysis one may now examine the behavior within the framework of
thermodynamics. In this way the macroscopic quantities of the material can be linked to its
microscopic energy dissipation mechanisms (e.g. fracture and yielding), and thus one can obtain
22
a rigorous definition of these variables. Such an investigation begins with the Clausius-Duhem
inequality:
pdt = EdE - d
;> 0
(2.17)
which states that whatever portion of the externally supplied work, EdE, that is not stored as
free energy,
'b,
in the system is dissipated as heat. The free energy,
variables, the total strain, E, and the permanent strains, eP and
4,
is a function of the state
EP. It is formally identifed as
the recoverable energy from the material, which for the case of the think model is the energy
stored in the three springs, that is:
20 (E, Esc)
= CM(E -
) 2 + CF(E-&')
2
+M(c"
-F)2
(2.18)
Substitution of this free energy expression into the Clausius-Duhem inequality yields:
odtpd==JueM
MdCp ++
UFd&P
FM
>0
(2.19)
-
along with the state equations:
E
0
M
E
-__
(CM
CF)E
CEM
-
-
- CME - (Cm + M)&E
CFEF
(2.20)
+ ME&
(2.21)
- (CF + M)cEP
-CFE + Me
(2.22)
One may observe:
1. The overall elastic composite stiffness Ko
Ko
=
=
CM + CF is derived from:
aE
a20
=
(2.23)
and the composite stiffnesses are defined by Maxwell symmetry relations:
CM = -
=
23
aE
&Eeo&y
(2.24)
(2.25)
EE
-
CF
Finally, we may express the compliance modulus M by:
M
=OM
OUF
_
(2.26)
02
In other words, the compliance modulus describes the change in the matrix stress due
to permanent fiber deformation, and vice versa. These cross-effects (or thermodynamic
couplings) ensure the stress additivity of the macroscopic stress, namely
E = am + OF.
2. Through an energy approach the composite stresses, aM and UF, are formally defined as
the thermodynamic forces of irreversible matrix and fiber deformation. Thus, they are
not related to external forces by equilibrium, but rather represent the driving forces of
energy dissipation, i.e. the transformation of externally supplied energy into heat.
2.1.4
Energy Transformation During the Brittle-Plastic Fracture
A closer examination of the energy released during the fracture of the matrix allows not only
for its definition in terms of material parameters, but also for the definition of a ductility ratio.
For a strain-driven experiment, where the macroscopic strain is frozen at the critical value at
which the jump in macroscopic stress occurs, we define the total dissipated energy as the jump
in free energy. Thus:
/
Dps
_t
=--[]]=
1 ft2
±M
2Cu+
kj+ 2 km
ft
>- 0
(2.27)
This dissipation may be split into two terms: one associated with pure matrix cracking and
another associated with the activation of the matrix friction strength kM, where
These two dissipation expressions, labeled -[[V)]]c
-
1 2 C+
-
E' (E±)
and -[[]]M respectively, may be expressed:
2
-[W]M = kME(E+) = kM- f
CM + M
24
E'
0
-2[[
(2.28)
]]c km > 0
ft >
(2.29)
7I
'V
'V
A,
7
eo-7
+
I
~-1
-7
-'V
-
I
1'17
le10
(a)_
(b
000-r
z
/1.1Z
(c)
Figure 2-4: Sources of energy dissipation in the think model from matrix fracture and the
activation of the friction element, km [3]: (a) Dissipated fracture energy; (b) Dissipated friction
energy; (c) Total dissipation.
The relation of these two dissipation mechanisms to the stress-strain graph are displayed
in Figure 2-4. It should be noted that after fracture, energy continues to be dissipated via the
friction strength, which is a ductile failure mechanism. From this we obtain a ductility ratio,
which measures the ductility of the material upon first cracking:
RD=
-[]M
-2[[ ]]c
km
ft
(2.30)
One limit case, RD = 0, indicates a condition where there is no frictional dissipation, such as
an elastic-brittle matrix reinforced by fibers. Such materials are very brittle, and therefore offer
no failure performance increase over standard concrete. However, UHPC typically possesses
RD ~ 10, which demonstrates frictional dissipation is dominant and in turn accounts for the
25
CM
CF
M
v
f'
kM
aMc
UMb
fy
UFc
Description
for UHPC
SI
IU
Composite Matrix Stiffness
Composite Fiber Stiffness
Composite Interface Stiffness
Poisson's ratio
Brittle tensile strength of composite matrix
Post-cracking tensile strength of composite matrix
Initial compressive strength of composite matrix
Initial biaxial compressive strength of composite matrix
Tensile strength of composite fiber
Compressive strength of composite fiber
53.9 GPa (7820 ksi)
0 GPa
(0 ksi)
1.65 GPa
(240 ksi)
0.17
0.7 MPa
(0.1 ksi)
6.9 MPa
(1 ksi)
190 MPa
(28 ksi)
(32 ksi)
220 MPa
4.6 MPa
10 MPa
(0.67 ksi)
(1.5 ksi)
Table 2.1: Input parameters of the 3-D UHPC model and typical values for DUCTAL T M I
derived from a notched tensile plate test.
strain-hardening and the highly ductile behavior encountered.
2.1.5
Summary of 1-D Parameters
The 1-D approximation allows for an engineering-level understanding of the material. Supplied
with a list of material parameters, an engineer may use the equations in Section 2.1.2 and Section
2.1.3 to construct the one-dimensional plot of the idealized stress-strain response. Specifically,
the initial and post-cracking stiffnesses, KO and K 1 , by Equations (2.23) and (2.13), respectively.
The cracking strain, E 1 is obtained from Equation (2.15).
just before and after cracking,
Next, the macroscopic stresses
E- and Z--, are found through Equations (2.9) and (2.10),
respectively. Finally, the ultimate stress,
E2 , is supplied by Equation (2.14), with the associated
strain, E 2 , given in Equation (2.15). If a measure of the material's ductility is desired, this may
be found in Equation (2.30). An example of the necessary material parameters that may be
obtained is provided in Table 2.1.
2.2
Chapter Summary
In this chapter, the engineer has been introduced the the one-dimensional think-model, which
idealizes the uniaxial stress-strain behavior of the UHPC material.
A link has been made
between the material parameters and the model's critical stresses and strains, so that a plot
26
may be constructed from data supplied by the material manufacturer.
It is this analytical
model that serves as the foundation for the latest set of design guidelines for UHPC structures,
which evolved from the empirical methods of previous recommendations.
Though focus has
remained exclusively on tension, we will see in subsequent sections that its magnitude relative
to compressive strength informs the limits placed on shear and bending capacity in structural
design.
27
Chapter 3
Prior Recommendations for
Hardened UHPC Design
Developing a material model is one thing, it's implementation another. As is evidenced by the
variety of building codes that exist in the world, methods for design have just as much to do
with local practice, culture, and conditions as they do with the engineering. However, they all
share certain elements that are essential to the engineer.
First and foremost, a suitable description of the material's stress-strain behavior must be
provided.
Depending on the level of conservativism desired, this stress-strain response may
follow from characteristic or average values obtained from testing. Second, there must be clear
criteria for identifying failure of the material in a structural element. Classically, these have
been strength-based criteria, but with the advent of higher-performance materials with unusual
strength and ductility behavior, attention has turned to performance-based criteria. Third,
an engineer must have a set of formulas that allow for the application of such criteria to a
range of expected critical loading conditions (e.g. flexure, shear). Other choices, such as the
incorporation of safety factors or the level of conservativism in the design approach, may be
suggested but are largely left up to the engineer to decide upon.
Currently, two major design philosophies exist for hardened UHPC, both of which will be
presented briefly herein. The first is a set of recommendations by the Association Frangaise
de G6nie Civil (AFGC), which were derived from empirical testing and meant to augment
28
their current body of codes. The second was developed by Hesson Park, fusing the analytical
continuum mechanical model with elements from both the AFGC recommendations and the
current crop of load resistance factor design (LRFD) methods. In this section, the engineer
will be shown the evolution of UHPC design codes so that there is an understanding of its
history. Since the current set of recommendations borrows much from both philosophies and is
compared against these two previous guidelines in subsequent chapters, it is necessary that the
engineer be knowledgeable of what came before.
3.1
The AFGC Recommendations
In 2002 the AFGC released a document entitled, "Betons fibre6s
a ultra-hautes performances
- Recommendations provisoires (Ultra High Performance Fibre Reinforced Concretes - Interim
Recommendations)".
These guidelines, created from an empirical body of material research,
are still in use today and have aided engineers in producing a fair number of bridges around
the world. They include considerations for the casting, testing, and structural design of the
material, based primarily upon the French "BPEL" codes combined with a few elements of the
"BAEL" codes. Since the MIT recommendations follow from AFGC insights, it is instructive
to review them here.
3.1.1
Behavioral Characteristics
This first section of the AFGC codes serves to introduce the engineer to the methods by which
UHPC is produced and the options available for the selection of the material. At the beginning,
the engineer either has an "identity card" supplied to him or her detailing the characteristics or
may choose from a range that can feasibly be matched by the manufacturer. In either case, the
AFGC recommends a considerable testing procedure, detailing acceptable practices for thin
slabs, thick slabs, beams, and shells. The two most important values to be obtained from
these tests are the compressive and tensile strengths, which are important to the engineer for
calculating the loading capacity of the structural member. Other quantities may be determined
from testing, though the code recommends design values for the elastic modulus and Poisson's
ratio, which are 55 GPa (7252 ksi) and 0.2, respectively.
29
Compressive behavior is approximated as elasto-plastic, with an initial linear elastic range
followed by a yield plateau.
Uniaxial testing of a set of samples produces a corresponding
range of compressive strengths, so the characteristic value,
by subtracing one standard deviation from the mean value.
fck,
is sought.
This is obtained
In the plot of the compressive
behavior, the onset of plastic yielding is taken to begin when the stress has reached 85% of the
characteristic strength divided by a safety factor. In terms of a strength domain, this may be
written as:
f5(E, fk) = E --
<_ 0
(3.1)
For tension, the objective is to obtain a relation between the stress and the crack width, or
the magnitude of the crack opening. Unlike standard concrete, UHPC contains a considerable
reserve of strength beyond the cracking of the matrix, and so some other easily-identifiable
macroscopic quantity must be used.
This is in contrast to standard material tests, where
a stress-strain relation is directly obtained by considering the elongation with respect to an
initial gauge length.
Specifically for the tests, the recommendations suggest the definition of the flexural tensile
strength, ftj, since it is the critical point of matrix fracture. Furthermore, the value used for
design is the characteristic value, obtained in a similar manner as the compressive strength,
though different testing procedures are required and outlined later. Also of importance in the
tests are the stresses associated with a crack width of 0.3 mm and 1% of the section height.
These values are then used to construct the simplified tensile-strength law, displayed in Figure
3-1. Note that the plot reaches zero when the crack width equals one-fourth of the fiber length,
after which there is deemed to be an insufficient stress transfer between the matrix and the
fibers.
Thin slabs are defined as elements with a thickness e such that:
e < 3LF
L > 50
e
(3.2)
where Lf is the length of the individual fibers and L is the span of the slab.
For these members, the tensile strength is obtained through a three-point flexural test of
30
L
Ouvrture
de &tisumi
Ele5mqu8
/ .Ja~&ni
taw
|Cra
0
nn
0,3 mm
1% hauteur
prime
_L
4
W
Figure 3-1: The simplified stress-crack width law for tensile behavior [4]
rectangular prismatic members, where the thickness is equal to the structural thickness, the
length to 20 times e, and the width greater than or equal to 8Lf. Plates with a similar thickness
are considered in this condition.
Members with the following chracteristics:
e > 3LF
L
- > 10
e
(3.3)
are classified as thick slabs, and may be tested one of three ways, in order from least to most
preferred:
" Center-point displacement-controlled flexure on notched prismatic members.
" Direct tensile strength testing on un-notched prismatic or cylindrical specimens.
" Direct tensile strength testing on notched samples.
Furthermore, the dimensions of the specimens is a function of the length of the fibers used. [4]
As before, plates with such characteristics are to be tested the same.
Though no specific dimensions are given, beams are generally members whose height is
greater than their width and which may be subjected to a range of possible actions at any time.
31
In spite of the material's relative youth on the market and the ongoing evolution of construction
codes, there are significant projects made entirely of UHPC. For an example of one designed
according to the AFGC recommendations, one may refer to the Sakata-Mirai bridge in Japan.
An article was written on its design by Tanaka, Yoshihiro, et al is entitled "Design and
Construction of the Sakata-Mirai Footbridge Using Reactive Powder Concrete." [7] This
paper not only follows the same layout as the sections of AFGC recommendations themselves,
but also is explicit about the design values, assumptions, load factors and the like that were
incorporated.
The AFGC recommendations specifically list longitudinal bending, transverse bending, shear,
torsion, prestressing, and localized effects. For these such members, a three-point flexural test
on an un-notched specimen is recommended.
3.1.2
Heat Treatment
The effects of heat treatment, essential to the formation of the high strengths seen in UHPC,
are discussed briefly. As identified therein, the benefits of such treatment are:
" Faster strength evolution.
" Zero long-term shrinkage and significantly less creep.
* "Considerably improved" durability. [4]
Quantitatively, the first point removes the need for the 28-day limit before use. A component
may be ready for installation in as little as three or four days from pouring.
In addition,
both compressive and tensile strengths are typically 10% higher than the 28-day strength with
storage in water. For the second point, the creep coefficient may be reduced from 0.8 to 0.2, a
75% reduction. Finally, heat treatment causes a reduction in the void ratio, which in terms of
durability means a higher resistance to precipitation, radiation, and chemical penetrance.
3.1.3
Structural Design Recommendations Overview
The main thrust of the recommendations are their treatment of structural design, with an eye
for flexure. Design parameters for the serviceability and ultimate loading states are considered
for bending, with appropriate deisgn stress-strain diagrams for each case. Shear effects are
also addressed, but in a manner reminiscient of the ACI design codes for standard concrete.
32
Reinforcement in longitudinal and transverse directions are mentioned, but are not essential to
the evolution of UHPC design codes presented in this work. Consequently, they are included
as asides in subsequent sections.
3.1.4
Behavioral and Safety Factors
Though in engineering practice the fiber orientation in the mix may be assumed to be random,
this is not always the case in reality. Testing has confirmed that when placed in the mold,
the material fibers may orient themselves in a primary direction, which creates ansiotropy
(as opposed to isotropy). Thus, the element will exhibit considerably greater capacity in one
direction and reduced capacity in others.
In the recommendations, this is known as the orientation coefficient, 1/K, of the composite
material. There is a difference between the coefficient's local or global values, owing to the
relative sensitivity to the tensile behavior. For instance, in designs that "propose to use tensile
strength in very specific places" or cases where surface or bursting effects are the focus, the
local value should be used. All other cases should use the global value.
While this value is typically deduced from testing, the recommendations do include
recommended values for design:
K
1.25, global
1.75, local
(3.4)
A partial safety factor, ybf, is applied only for ultimate limit state (ULS) cases.
The
motivation is to act as a catch-all for any manufacturing defects that would adversely affect
performance. The recommended values follow AFREM rules, and are:
7bf
3.1.5
f
1.3, for fundamental combinations
(3.5)
1.05, for accident combinations
Characteristic Length
The charcteristic length is defined as the crack length that 95% of the tested specimens will
exhibit upon the attainment of the tensile strength.
33
One needs this in order to transition
from a stress-crack width constitutive law to a stress-strain one. As engineers are well-trained
in relating stress to strain and vice versa, the benefit of such a translation is obvious. Such
computation proceeds:
=
f
Et
+ 1,
(3.6)
where Etj is the modulus of elasticity in tension, w is the crack width at fracture, and
characteristic length. For rectangular or tee cross sections, a design value of
l is the
l = 1h may be
used, where h is the height of the section. In Equation (3.6), the first term captures the elastic
strain and the second term an irreversible cracking strain. Thus, the total strain,
E, stipulates
an elasto-plastic behavior for UHPC.
3.1.6
Constitutive Law for Serviceability Limit States
Serviceability limit state (SLS) design carries two assumptions: that plane sections remain
plane, and that stresses in the uncracked composite material are proportional to strains. Figure
3-2 demonstrates the constructed stress-strain plot for SLS conditions, with the top graph
modeling a strain hardening response and the bottom a strain softening one. The parameters
of the plot and their values are:
"
t
Ee =
e E.3
*
E1 % =
*
-li
* Ubc
, and wO. 3 = 0.3 mm
=1+
1,
+ El,',
wK%
=
0.01H, where H is the height of the bending test specimen
41,
0.6fe3
0(W.--
where a(w) is the characteristic stress-crack width curve
%1%=
derived from testing.
It should be noted that 6 jim is a rigid limit for these recommendations, reflecting the fact
that after the cracking of the matrix the fibers are engaged, but that the debonding of the
matrix from the fibers occurs before fiber yield. It has been demonstrated that, when the crack
width is at least one-quarter the fiber length, debonding may be considered complete and stress
34
Loi 6crouissante - Strain hardening law:
L
B1
Sm St
I
Ee
I
---f---1 I
*
c~l%
--
f~I
-
Loi adoucissante - Strain softening law:
A
61
&21
I
_II _
C
G1%
'.-
Figure 3-2:
Stress-strain
recommendations [4]
relationship
fV
for
35
service
limit
state
according
to
AFGC
is no longer transmitted through the fibers. Should the value of EI% be unknown or greater
than lim, the constitutive law proceeds directly from
3.1.7
ebt to
zero.
Constitutive Law for Ultimate Limit States
Ultimate limit states (ULS) correspond to worst-case loading scenarios, typically identified as
those imposed just before the structural element fails completely. The difference in design is
that ULS usually requires non-linear analysis, since the linear elastic capacity of the material is
exhausted and plastic deformations have occurred. The associated constitutive law for ULS is
shown in Figure 3-3. Recalling the partial safety factor, -Ybf, mentioned earlier, the parameters
of the plot and their values are:
"
E, =
3%
.
* EeJ
-Ybf Eii
* EuO.3
= w
* &u2% =
* Ubcu
f,Ei, where wO. 3
+1,
-bf
+
=
0.3 mm
, w1% =
0.01H, where H is the height of the bending test specimen
=
,7(where
0.85 fYbf
a(WO3
=,
i
o(w) is the characteristic stress-crack width curve
derived from testing.
3.1.8
ULS and SLS Shear
Shear forces are more dangerous than bending from a performance perspective since failure is
typically sudden. The fibers in UHPC, however, provide a vital stress bridge through the crack
surface, and so extra shear reinforcement is largely unnecessary.
For the SLS case, shear checks are only necessary when prestressing is involved.
36
The
Lui 6crouissante - Sraznharderngkz
9
A
Ec'ta
FiI
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
Sbc
-4-
SE
GUa1
owny~
0
Loi adoucissante - Strainsoftening Law:
it
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
E1 1
I
I
son
Ce ts Ewea Se
Gcu I%
relationship
se
crbl
I
Figure 3-3:
Stress-strain
recommendations [4]
&eC
I
I5I)%f
for ultimate
37
limit
state
according
to
AFGC
formulas for such verification are:
-
*
2
-XOt
_ aat
where r is the shear stress,
0.25ftj
fti + 2(O- + O-t)
(3.7)
2f- [ 6fc - (o-x + o-t)] fej + 2 (O-x + a-t)
(3.8)
o-x is the mean compressive stress due to longitudinal pre-stressing,
and at is the mean compressive stress due to transverse pre-stressing.
Should a check be
necessary where the mean stress is tensile (a- < 0) then the above conditions are replaced by:
T
2
< 0.25ftj
fta + 2 at
(3.9)
Even though the ULS case involves severe loading conditions, the AFGC recommendations
suggest that the shear strength provided by the fibers may make it possible to omit transverse
reinforcement entirely. In the event that this is not the case, the ultimate shear strength may
be calculated and checked against the shear induced by ULS loading. The main equation is:
Vu = VRb + Va + V
(3.10)
where VRb represents the participation of the matrix, Va the participation of any included
longitudinal reinforcement, and Vf the participation of the fibers. Each of these terms are
explicitly defined in the recommendations.
For Va, the form is equivalent to that defined in the BPEL rules, which is:
Va =
0.9d At f (sin a + cos a)
St 'Y8
At
f, sin a + 3u
s
-y, sin3 u
(3.11)
where:
" At is the cross-sectional area of the reinforcement, st is the spacing, and fe is the tensile
strength
" z is the effective height of the area resisting shear
38
* 'Ys
is a safety factor, usually equal to 1.15 but equal to 1 for accident combinations
* a is the angle between shear reinforcement and the axis of the web.
* /3. is the angle between the cracking plane and the axis of the web, which should be no
less than 30 deg.
The expressions for VRb are considerably different, and are defined for the case of either
reinforced concrete or prestressed concrete. For reinforced concrete, VRb is calculated:
1 0.21
VRb
-
'YE 'Yb
(3.12)
k Vfcbod
where:
* bo is the section width and d its depth
" 7E is a safety factor reflecting the uncertainty of extrapolating established formula for high
performance concretes (HPC) to UHPC. This safety coefficient must satisfy the condition:
YE - Yb = 1.5. If 'Yb is taken as 1.3, then 'YE is approximately 1.15.
" k is a factor reflecting whether the portion of concrete considered is in mostly tension or
compression. The expressions are:
k =14 30-cm
0 .7
atm
ftj
(3.13)
ftj
where am is the mean stress in the total section under the normal design force.
In the case of prestressed concrete, the expression is:
1 0.24
VRb =
-
'YE 'b
k
f&,boz
(3.14)
where bo is the width of the area resisting shear.
The contribution of the fibers to the shear strength is captured in:
ScoVf=
SP
bftanu
39
(3.15)
where:
" u-, is the residual tensile strength, calculated by:
-
I
K wumn
jWirn
0
o-(w)dw
(3.16)
with wlim = max(ws; 0.3mm) and w, = 1E,,
" w, is the maximum crack width under ULS loading conditions
" S is the area of the fiber effect, estimated by:
S = 0.9bod
= boz for rectangular or tee sections
S = 0.8(0.9d) 2
= 0.8z 2 for circular sections
(3.17)
Again, shear reinforcement is typically unnecessary, but checks should be made to ensure that
this is the case.
3.2
The MIT Recommendations
In her 2003 Masters of Science thesis at MIT, Hesson Park developed an optimization method
based on Dr. Chuang's analytical model and elements of the AFGC recommendations.
Her
work is the major influence behind the current MIT hardened UHPC design method, and so
shall be reviewed here.
3.2.1
1-D Section Design Formulas
Highway bridge girders are the intended major application for UHPC for these design formulas.
As a result, optimization focuses solely on flexure, with a check for shear performed via finite
element simulation. Also, in the 1-D section the web carries no moment, so it is assumed that
there is a mean compressive stress in the top flange and a mean tensile stress in the bottom
40
H'
Ft
Tensile
Figure 3-4: Idealized bending behavior in the cross-section.[8}
flange. This reduces to a force couple with the compressive force, Fe, and the tensile force, F,
separated by distance, H'. A drawing of this configuration is
Since the top flange is assumed to remain in elasticity, it is the bottom tensile flange that
is critical, and so the maximum admissible moment of the model may be approximated by:
M, 5 max M = (EjAf) x H'
(3.18)
where M, is the design moment and EB is the effective strength of the bottom flange of area
Af. This formula assumes that, because of the high compressive strength relative to the tensile
strength, the upper flange and deck are safely within the elastic range, while the bottom flange
is at yield. Proper functioning of the fibers at yield requires a maximum crack width criterion
such that the local strains do not exceed some critical value. This criterion reads here as:
max (e'MI (1)) :
Esm
(3.19)
where eCm refers to the maximum admissible plastic strain in the bottom flange and 6'M ( )
stands for the plastic strain realized locally (at a point located by position vector x) in the
structure. Note that unlike the AFGC limit seen in Sections 3.1.6 and 3.1.7, it is the matrix
plastic strain specifically that is limited. This reflects the understanding that it is only the
41
matrix that has cracked, while the fibers are still elastic, as shown in Sections 2.1.2 and 2.1.3
Ecm depends on which limit state is considered,
and in Figure 2-3. The explicit expression for
and so shall be expanded upon later.
Because the limit stress associated with this maximum plastic strain,
be smaller than the effective yield strength, E,
Em = E(EP)
may
of the bottom flange, a reduction factor,
f, is
defined such that:
f =1
(3.20)
y
Thus, Equation (3.18) becomes:
M. < maxM
f
x
(EBAf)
x
H'
(3.21)
The design moment itself is comprised of two terms: one resulting from the applied loading,
MUoad, and another produced by the prestressing of the section, Mp = -pAf H', where p is the
effective prestress pressure and is assumed to be applied in the bottom flange. This effective
pressure is given by:
(3.22)
p = yfy'cT
where 0 < CT
1 is the prestress level, fIT, is the yield strength of the prestressing tendons, and
is the reinforcement ratio as defined by:
CT =
(3.23)
As,total
Ag, lange
As,total is the summed area of the prestressing tendons and Ag,flange is the gross area of the
flange that contains them. Note that even though the prestress creates a moment across the
entire section, it affects the behavior of the composite locally. Discretizing the cross-section
under consideration into a rough "I" shape composed of idealized rectangles helps with both
the conceptualization and calculation of this effect. An example of such idealization is presented
in Figure 3-5. Thus, each rectangular subsection has its own
CT
value and may consequently
be identified as either reinforced (including prestressed) UHPC or unreinforced material.
42
W
t
I
dTF21
TF 2
bTF2
dTF1
TF 1
bTF1
dw
Web
bBF1,
B F1--
dBF11
dBF2I
-------- ------
BF 2
-- YS1
ys2
bBF2
Figure 3-5: Sketch of discretized cross section used in design and analysis. W is the effective
slab width of the deck, if it is included.
Substituting the two terms of M into Equation (3.21) gives:
M, = Mload - pAf H' < fEB Af H'
(3.24)
or in dimensionless form:
Mi ad
(
(3.25)
Af)H < f + P
A relation between the bending moment,
Mload,
and other significant section parameters
suitable for design use begins to take shape, but some paramters have yet to be defined:
* The effective yield strength, E,
is difficult to explicitly determine, so an upper bound
estimate is used, which reads:
EB,
+ cT[(1 -
43
T)f'- E
(3.26)
where
E
=
km +
fy
is the ultimate composite yield strength of the UHPC material which
is enhanced by the strength reserve of the tendons, represented by (1
"
-
T
The dimensionless prestressing, f, is defined as:
c fT
S=
(3.27)
y
which is the ratio of the effective prestress pressure to the effective yield stress.
" From its definition in Equation (3.20), the factor,
maximum crack width. The associated limit stress
state equation (2.22) by allowing
EP = -m
and
f,
captures the restriction of the
EZm = E(EPm) is determined from the
E& = 0, and noting that am = km. As a
result:
EBm = CB +
where Cf
I + CF
m +
I + LF
km
(3.28)
is the effective composite fiber stiffness and is defined by:
CF =CF
+
cT
(ET -
CF)
(3.29)
and ET is the Young's modulus of the tendons. All parameters (CM, CF, M, km) are
UHPC material parameters.
An equation is now in place that includes the effects of the prestress, the crack limit criterion,
and effective section properties into the design for a maximum loading moment. Our next step
is to expand upon an expression for M oad that contains safety factors and a consideration for
the SLS and ULS states.
3.2.2
Limit States Design Criteria
Engineers are familiar with the concept of Load Resistance Factor Design (LRFD), whose
method is to overestimate the loads and underestimate the section capacity with factors that
represent the probability of certain events.
For instance, in the SLS case a dead load may
be given a factor of 1.0 while live loads are reduced by 0.8.
Thus, for everyday concerns
dead loading is more likely to occur than live loading. Between SLS and ULS, the dead load
44
factor may change from 1.0 to 1.25, which reflects the severity of the loading for the ultimate
state against the amount of loading expected in normal service. Recalling that Ms. Park worked
solely with highway bridge girders, the American Association of State Highway Transit Officials
(AASHTO) recommended that the load combinations for SLS are:
FSLS = 1.0 x (gi
(3-30)
+ 92) + 0.8 x (6 x P1 + p2)
and for ULS are:
FULS = 1.25 x gi + 1.5 x g2 + 1.75 x (6 x p1 + p2)
where gi stands for the dead load of structural components,
(3.31)
g2 for the dead load of wearing
surfaces, p, for traffic load that is amplified by a dynamic load allowance factor 6 = 1.33, and
P2 for static traffic load. The coefficients in the two equations are load factors.
Serviceability here is defined differently than with the AFGC. In the graph for the SLS
constitutive laws, Figure 3-2, cracking is allowed to develop in the structural element. When
cracking occurs, though, the matrix has already dissipated energy through fracture and
plasticity, and so has lost the benefit of its elastic range.
Ms. Park's work considers this
unfavorable for long-term durability and crack propogation due to fatigue, and so asserts a "no
cracking" criterion:
max
[[w(FSLS)11 = 0 #> max EM ,I W
im
The ultimate limit state is roughly the same as the AFGC conditions (See Section 3.1.7).
That is, a maximum crack width criterion is used with the expectation that under ultimate
loading conditions the matrix has cracked.
This provides an easy visual gauge of the
performance of the structural element: the absence of cracks indicates that the element is
handling expected loading properly, and the presence of cracks indicates that overloading has
occurred. Here, the cracking criteria reads:
[[w11,m =
max [[w(FULS)]]
x
0.3mm
(
in
for unreinforced section
85
L/ H
; H)for
[[w]m =-min
(4 100
45
reinforced section
}
(3-33)
Reinforced UHPC includes prestressed material. Unreinforced UHPC would most likely occur
in the web if prestressing tendons are used only in the bottom flange, or anywhere else in
the section where reinforcement is not. Noting that [[w]]lim equals the crack opening over a
characteristic length,
max ye ,1
l = 1h, this limit reads in terms of strain:
6
(1, FULS))
m
=m
[C
E
--
hL
Epre -min
lm8H
where
'
and
(3.34)
for unreinforced section
= 1.5
m
; -.3"
(
'200]
for reinforced section
e[2 are the limiting plastic strain for unreinforced and reinforced composite
material, respectively; Lf is the length of the fibers, and H is the height of the total crosssection. Plugging the SLS and ULS strain limits into the state equation yields the associated
effective stresses EB , which are:
EBr = (
=
±
km for SLS
li m
C )
B
B(3
)1im+
[CB + M (Ij+
(1+
.3 5 )
k
for ULS
With all the necessary variables and limits in hand, one may now move onto a generalized
optimization procedure.
3.2.3
Optimization Procedure
Optimization requires five categories of parameters: the geometric parameters of the structural
element, the prestressing parameters, the UHPC material parameters, the applied load F which
is greater than or equal to FULS, and the dimensionless expression for
MIoad
in Equation (3.25).
Each of these elements is discussed below:
1. Geometric structure parameters include the span, L, and any variables necessary to
describe the section geometry. These may include, but are not limited to: the top flange
width,
bTF;
top flange thickness,
dTF;
bottom flange width and thickness,
the web height, du; the web thickness, b,; and the
bBF
and
46
dBF.
2. Prestressing parameters include the prestress pressure, p, and the prestressing level, -Y.
The total prestressing force, P, applied to the section equals pA, = pNAi, where A, is
the total area of steel tendons, N is the number of tendons, and Aj is the area of an
individual tendon.
3. Material parameters for UHPC are typically supplied by the material manufacturer, and
exemplary values are given in Table 2.1.
4. F, the applied load, should conservatively be greater than or equal to FULS.
The
philosophy is to check the ULS condition first and then go back and ensure that the
SLS condition is satisfied.
5. Equation (3.25) brings all the elements mentioned above into an equation for flexure.
Altering any, some, or all of the parameters in the four categories above will have an
effect on the balance of the equation.
Rewriting Equation (3.25) while keeping in mind the relevance of the caregories allows one
to isolate a relation between the effective height, H', and the span, L:
H'
me
>
L - 1+p
-
(3.36)
where f- is the normalized moment given by:
Ml0ad
Tu = M,
and
L
(3.37)
p is the normalized prestress pressure, given by:
P =
= CT
y
y
(3.38)
The relationship between H' and the actual section height H is dependent upon the heights
of the flanges and web, which depends on the choices in section parameters that the engineer
makes.
47
Significant differences exist between the stress-strain plots of the AFGC and MIT UHPC
recommendations for tensile behavior. The AFGC plot is based on the characteristic behavior
of the material whereas the MIT UHPC model utilizes the mean values. Second, all AFGC
plots in the end exhibit a strain-softening form of plasticity after the peak in tensile strength.
This is a way to introduce extra conservativism to the design, since, when the codes were
developed, UHPC was in its infancy on the market. The UHPC model, on the other hand,
while closer to observed behavior is still somewhat idealistic. Stress and strain proceed linearly
until the cracking of the matrix, at which point there is a stress drop. The secondary stiffness
of the composite material is engaged, and stress and strain continue to rise until the entire
material yields, which then acts in a perfectly plastic manner. A cut-off ultimate strain
is therefore introduced, 6Eim, which corresponds to the maximum admissible strain before
fiber pullout. Both methods, however, declare the strain associated with a maximum crack
width to be the maximum allowable in the material. Third, the AFGC model chooses to
incorporate corrective factors for the orientation of the fibers as well as apply safety factors on
the material characteristics. These are identified as the K values and -y factors, respectively.
Since the MIT UHPC method borrows the LRFD philosophy, such factors of safety are
applied to the calculated capacities for shear and bending instead of the material parameters
themselves. Because of these differences, it has been suggested that the AFGC method is
overly conservative in design and that the MIT UHPC model will produce more efficient
designs.
3.3
Rte. 624 over Cat Point Creek
Whereas the AFGC codes were employed for many bridge sections around the world, the Cat
Point Creek bridge was the first to use the MIT recommendations. Because the material had
not been rigorously tested in the field in the United States and required design methods that
were not covered in the codes, Professor Franz-Josef Ulm [10] of MIT submitted a white paper
detailing the design method in full. Its defining characteristic is its hybrid mix of AFGC crack
criterion and shear recommendations, the overall philosophy and design factors of LRFD, and
the stress-strain diagram of the MIT UHPC 1-D material model.
The reader is reminded that this UHPC stress-strain curve is different from that found
in the AFGC recommendations. Plots of both are included in this work, and can be seen in
Figures 3-2 and 3-3 for the AFGC recommendations and Figure 2-3 for the MIT UHPC model.
Descriptions of the AFGC recommendations are in Section 3.1, while the 1-D analytical model
can be found in Section 2.1.
48
3.3.1
Design Principles
Design principles outlined in the Cat Point Creek white-paper shall be considered first. The
aim, in mathematical terms, is:
N
VJ = SLS, ULS; Z(abiyQj)j < (#R)j
(3.39)
i=1
where the left hand side represents the factored design load, to be determined according to the
current standards based on LRFD specifications, with:
"
Qi
*
ai = Load factors
= Nominal loads (dead and live loads)
" Vi = Load combination factors
" yj = Importance factors
The right hand side of the expression represents the resistance of the UHPC section:
" R = Mean load capacity of the UHPC structural element, achieved at a specific maximum
allowable crack opening for the material.
=
*
Design strength reduction factor.
Continuing with the design of highway bridge girders as an illustration, for SLS conditions,
J= SLS, the left-hand side reads:
N
Z(aiOpiy Qi)SLS
2
=
1-0(gi + 92) + 0.8(6 X P1 + P2)
where:
* g1 = Dead load of structural components and any non-structural attachments
*
92=
Weight of future wearing surface on slab (e.g. asphalt, concrete topping)
* 6 x p, = Design truck live load with dynamic amplification factor (6 = 1.33)
49
(3.40)
* P2 = Design lane load of 0.64 kip/ft (without dynamic amplification)
For ULS conditions, J = ULS, this becomes:
N
Z(a?/'-
Qi)SLS = 1.25g, + 1.50g2 + 1.75(6 x P1 + p2)
(3.41)
i=1
The characteristic resistance is controlled by a maximum crack width criterion identical to
that found in Section3.2.2. In the case of the serviceability limit state, the UHPC section should
remain uncracked, such that:
(OR)SLS
OR[[w]]
0)
(3.42)
For ULS conditions, a certain amount of cracking is allowed:
(OR)ULS - OR (WI]
5 [[W]lim)
(343)
with:
" For unreinforced UHPC (e.g.
the unreinforced web in shear design), the maximum
allowable crack opening is:
[[w]
"
= .254 mm (0.01 in)
(3.44)
For reinforced (including prestressed) UHPC, the maximum allowable crack opening is:
[[w]] "* = min (
, H)(3.45)
where Lf is the length of fibers, and H is the UHPC section height.
These limits ensure that the UHPC section fails in a ductile manner, that deflections are kept in
check, and that bond rupture does not occur between the prestressing strands and the UHPC
material.
50
3.3.2
Section Strength Moment Capacity
Calculation of the maximum loading moment and shear is not covered in detail, since it is
assumed that the reader is familiar with such design methods. Instead, the determination of
the mean moment capacity, the design moment, and the amount of prestressing required shall
be covered. The section moment capacity is based on the following requirements:
1. Section equilibrium dictates:
NR = j
-(y)da = 0
(3.46)
SA
MR
=
Ay(y)da
(3.47)
SA
where a(y) is the longitudinal stress in the cross section, A, at a distance, y, from the
neutral axis. NR is the normal force in the section minus the prestressing force in the
section, and MR is the moment capacity of the section. Prestressing is accounted for only
in the calculation of section moment capacity by considering an elasto-plastic relation for
the prestressing strands:
o-(yp) = -yf + ETe(yp) <; fg
where -y is the prestress level of the tendons (after losses due to creep),
(3.48)
fy
is the yield
stress of the prestressing tendon, ET is the Young's modulus of the tendons, and C(yp) is
the strain in the prestressing tendons located in the cross-section at y = yp. Note that
this stress is the sum of the prestressing in the tendons and the change in tendon stress
brought about by changes in strain.
2. Plane sections are assumed to remain plane. Given this linearity, the strain at any point
in the section is therefore given by:
e(y) = E(Yo) where
',(y - yo)
(3.49)
E(yo) is the strain at the reference point y = yo and r, is the curvature. If the
51
centroid y = y, is taken as reference, where
E(yc) = 0, then:
(3.50)
- Yc)
E(y) = -K(Y
3. Maximum crack width criteria control determine the maximum tensile strain in the
bottom flange.
For the service limit state, which has a zero crack opening condition,
the maximum admissible tensile strain is:
Y = Ymin : ESLS
where
(3.51)
KO
El~ is the cracking strength of the UHPC material, and KO its initial elastic stiffness.
For the case of the ultimate limit state, it is noted that the material in the bottom flange
qualifies as reinforced UHPC, so the maximum admissible tensile strain is:
Y = Ymin : EULS
lr
= K
E
±
Ko + min
(3.52)
3
3 (
8h ' 200
where E 2 is the ductile yield strength of the UHPC material (just prior to ideal plasticity).
Note that this is the total strain, which is the sum of the reversible elastic strain and the
permanent strain associated with crack opening.
4. The stress-strain behavior of UHPC is described by the following relations:
(a) Compressive behavior:
0 > - = KOE
where
f,
(3.53)
-
is the UHPC compressive strength.
(b) Elastic tensile behavior:
0 < E < ESLS : a = KOE
(3.54)
(c) Post-cracking tensile behavior:
ESLS <
e < EULS
52
: o- = E +
K1
(E
-
ESLS)
(3.55)
where E+ is the stress immediately after cracking, and K 1 is the post-cracking
stiffness.
Design moment capacity is therefore the moment, MR, multiplied by a design factor.
Typically, this follows the form:
4kMMR
=
MA - 1.75sj
(I - 1.75 sjM
MA
(3.56)
where MA is the mean moment and sj is the standard deviation. If such data is not available,
then a series of flexural tests on small specimens may be conducted to ascertain the value of
Om. A safe estimate to use in bending is:
Om
3.3.3
=
0.85
(3.57)
Determination of Prestressing Strands
When the Cat Point Creek bridge was designed, it was determined that a standard AASHTO
section profile (PCBT-45 VDOT Bulb T sections) would be used. This was considered a wise
choice for convenience in construction, since the girder profile is well-known and has been used
for standard concrete.
Since these section parameters are fixed, focus on increasing section
capacity falls on the amount of prestressing applied.
For design purposes the section was
discretized, and all prestressing tendons were assumed placed in a row at the same height, as
illustrated in Figure 3-5. The aim of the analysis, then, is to determine the required prestressing
force that satisfies the following relationship:
)
(3.58)
As,, As 2 , Ysl, Ys 2 )
(3-59)
MSL
< 0.85 x M Ls(71,Asi, As 2 ,is1,Ys
MUL
< 0.85 x MLS-,
2
and:
where Mmax, J = SLS, ULS are the maximum design moments induced by the loading, and
MA are the resisting moments produced by the prestressing. These resisting moments are, in
turn, dependent upon the prestressing level, -y; the areas of the two subsections that contain
53
the prestress tendons, A,, and A, 2 ; and their moment arm lengths (distances from the neutral
axis), ys and Ys2. The net axial force imposed by these tendons is therefore:
Po = Ifl(Asi + As 2 )
where
fy
(3.60)
is the yield strength of the tendons. Design proceeds by optimizing the number of
tendons in both subsections until both Equations (3.58) and (3.59) are met simultaneously.
3.3.4
Shear Capacity of Section
As with the AFGC recommendations (see Section 3.1.8), the check for shear capacity is different
for the SLS and ULS limit states. Recalling that the service limit state requires that the material
remain uncracked, the maximum tensile stress produced by the axial and shear stresses (o-, r)
must be less than the cracking strength, E:
-I
+
T)2
(
(3.61)
Therefore, the maximum admissible shear stress is:
(3.62)
1-
Thm=
The shear strength equals the shear stress multiplied by the effective shear area. Assuming
here that this equals the area of the web, the shear capacity is:
VSLS
where AV
-
A ef f
f f = A.
-
(3.63)
is the effective shear area, A, is the area of the web, and a is the longitudinal
stress. A conservative estimate of this maximum stress (close to the support) is a = -- yP/Att,
where P is the total prestress force, and Att0 is the total cross-sectional area including the slab.
Mean capacity is reduced to design capacity by means of a design factor, Ov = 0.85, so that:
VSLS(Xv)
<
54
3LS(64)
where xv is the position along the girder span where the shear is being checked.
In the case of the ultimate limit state, the assumption is that the matrix has cracked and
that the fibers bonded to the matrix carry part of the shear loading. Given that there is no
transverse shear reinforcement (which would be needed for standard concrete), the term V (see
Section 3.1.8) is omitted. The shear capacity of the section is therefore determined by:
vVRLS
cVc
=
+ Of Vf
(3.65)
where:
" V is the contribution of the UHPC concrete, which, in line with the AFGC recommendations, equals:
Vc
=
{
0.24 17bwz SI units0.09Vjbwz English units
}
(3.66)
with b, equal to the web thickness, and z equal to the effective height, which is here the
height between the prestressing tendons and the compression flange.
" Vf is the contribution of the fibers, given by:
Vf = tan #2,
(3.67)
where A is the area of the fiber effect, which for a section comprised entirely of UHPC
may be assumed equal to the shear area; 3, ;> 30 deg is the angle between the cracking
plane and the web axis; and u- is the residual UHPC tensile strength defined by:
1
O-
=
f[[W]]li
f-(s)ds
[[w]]iim 0
(3.68)
In this expression, [[w]]"m is the admissible crack opening and u = o-([[w]]'m) is the stress
after crack opening. Recall that this expression is the same as Equation (3.16) in the AFGC
recommendations on ULS shear. Here, however, the UHPC material model of Section 2.1 is
known, and criteria exist to convert the limiting crack width into strain. In relation to stress-
55
strain behavior, this becomes:
up = 1
f 6ULS o s
ULS
P
ESLS
s(.9
69)
LS
where:
" E ULS is the strain at the ULS maximum crack opening. For the unreinforced web, this is:
+
EULS -
" ESLS
=
Ko2
h
(3.70)
"____
E /Ko corresponds to the strain at the onset of cracking
In order to evaluate the integral in (3.69), it must be determined whether or not the ductile
yield strength is reached at
EULS. This is done by calculating the strain corresponding to the
onset of yielding:
E2
ESLS
=
(3.71)
2 -
K1
If yielding has not occurred, then the integral is:
EULS
JSLS
o-Ls
o(s)ds
L
E(ULS
-
\
_SLS
_
) +
K1(ULS
K
2
L
_
SLS 2
/
Otherwise, the integral must be split into two parts:
EULS
o-(s)ds=
eSLS
]
e
E2
o(s)ds+
SLS
J
= Z±(ULS _ SLS
1 (/
EULS
-(s)ds
(3.73)
E2
K1
2
ULS
-
eSLS)2
ULS _ SLS)
Once this integral is calculated, then the values for V and Vf may be plugged into Equation
(3.66) with
3.4
#v
taken as 0.85 to obtain the value for the design shear capacity.
Chapter Summary
In this chapter the engineer has seen three design methods: one based on the empirical analysis
of the AFGC (Section 3.1) and two based on the 1-D analytical UHPC model (Sections 3.2 and
56
3.3). It was the AFGC that first defined a maximum crack width criterion, based on avoiding
fiber pullout rather than focusing on a constant maximum strain (and in turn a strength-based
criteria). After the analytical model had been developed, Ms. Park kept intact the concept of a
maximum crack width criterion, but applied it only to the plastic matrix, not the material as a
whole. For the serviceability limit state, she declared a no-crack criterion, as seen in Equation
(3.21), which differs from the AFGC recommendations (Figure 3-2).
state, the crack criteria was largely the same.
For the ultimate limit
Safety factors were applied to the calculated
bending moment instead of to the material directly, as in the AFGC recommendations (see
Sections 3.1.1, 3.1.4, and 3.1.7, and Figure 3-3). These factors are identical to those used in
LRFD design (see Section 3.2.2). In closing, she used the criteria on maximum plastic strain to
define a first-order optimization method to obtain the effective height between the compressive
top flange and the tensile bottom flange.
The third design procedure, outlined in the Cat Point Creek white paper (see Section 3.3),
formalized Ms. Park's incorporation of the LRFD design philosophy. Ms. Park's maximum crack
width criteria (Equations (3.32) and (3.34) are utilized, as are the AFGC recommendations on
shear (Sections 3.1.8) minus the calculation for shear reinforcement. These shear formulas made
use of the analytical model, thus removing the need for testing data to provide a stress-crack
width plot (Sections 3.1.6 and 3.1.7).
With this background knowledge, the reader understands the basis of the proposed design
methods of the next chapter.
57
Chapter 4
Proposed Method of UHPC Design
The current set of recommendations borrow from the AFGC recommendations, Ms. Park's
work, and the methods outlined in the Cat Point Creek white paper (Sections 3.1, 3.2, and
3.3). They represent the most up-to-date suggestions developed at MIT for UHPC material,
and produce the most structurally efficient cross-sections. Here, the engineer will find a walkthrough of the recommendations themselves, with criteria for bending and shear, and the
definition of efficiency factors and an efficiency function. These guidelines will then be tested
for their sensitivity to various idealized cross-sectional parameters, the presence of a size effect,
and compared against the AFGC and previous MIT recommendations.
4.1
Design Method and Criteria
The parameters that the engineer should have in hand at the start of design are loading values (in
accordance with LRFD specifications), the span length, and the composite material properties,
such as: the initial elastic modulus, Ko; the post-cracking modulus, K 1 ; the compressive
strength and strain, E' and
E', respectively; the cracking strength and strain, E- and E,
respectively; the post-cracking strength, E+; the ultimate yield strength and strain, E 2 and E2,
respectively; and the length of the fibers, Lf. Design will therefore focus on solving for the
cross-sectional dimensions and the pre-stressing force, if desired. Discretization of the crosssection into flanges and web is recommended for ease of calculation but is not necessary, and it
is noted that with circular or otherwise irregular cross-sections the calculations required may
58
become more involving.
Once loading moments and shear are calculated and known, section capacity may be
calculated.
In both bending and shear, it is limited by the maximum crack width criteria
defined by Ms. Park (Section 3.2), which are recalled:
max EPy
EPs
maxc
j < 6limJ
(4.1)
< 0 for J
SLS, whether reinforced or unreinforced concrete
Ef'u
=
E
= min
1.5
for unreinforced section
for J = ULS
h3Lm
<
(
; 3)
(4.2)
for reinforced section
Note that this is the maximum plastic strain of the matrix, and so the maximum total strain
equals this plastic strain plus the elastic strain, E 2 =
E2 /Ko.
Shear capacity may be calculated, in accordance with the maximum crack width criteria
and the formulas contained in the Cat Point Creek white paper (Section 3.3), by:
Vj = A
ffE
=V +V
1 (
)
for J = SLS
(4.3)
for J= ULS
o-pAeff
fI + opV
f
= 0.09
= 9 c vA V
tan3
(4.4)
where:
A
is the effective shear area of the structural member. In beams, this may be taken as
equal to the area of the web.
So- is the longitudinal force in the section, which may be conservatively estimated as:
- = 'yP/Atot, with Atot equal to the total cross-sectional area, including the slab.
" f3, is the angle of the crack with respect to the web axis. This may be taken as equal to
30 deg.
* u is the residual tensile stress, as defined in Equation (3.70).
59
Bending capacity is equal to:
MR
ya(y)da
=
(4-5)
SA
provided that maximum strain criterion is not violated. The neutral axis is located in the point
where the bending stress is zero when there is no net axial force, as defined in Equation (3.46):
j
NR =
o,(y)da = 0
(4.6)
SA
The calculation of such bending capacity is greatly aided by the use of a spreadsheet program.
In both bending and shear the capacity is reduced by a factor
#
0.85, as seen in Sections
3.3.2 and 3.3.4.
Prestressing may be included and is recommended, as it increases the capacity of a flexural
element for given section parameters. One may declare either a desired prestress force, P, or
a number, N, of tendons with a certain yield stress,
fA,
and prestressing level, -y. Where the
value for y is not known, it may be taken as equal to 0.8. However, one must ensure that the
prestressing force does not cause cracking in the top of the cross-section, since this compromises
the material's expected compressive resistance. Thus:
M
±p Mda
qMSLS
+ Mdead <;#M L
(4.7)
where MP is the moment produced by the prestressing force, P; Mdead is the moment produced
by the dead loading on the flexural member, which should have an opposite sign than MP; and
MSLS is the section capacity in bending for SLS reduced by the safety factor,
#.
This condition
reflects the fact that only gravity forces act on the girder during installation, and so it should
not crack anywhere under its own dead weight. Wherever prestress is included in the section,
it should have at least two inches of cover.
New to this design procedure is the concept of a structural efficiency factor, r7, which equals
the factored load divided by the factored resistance. Thus, for safety:
r
= =
with maximum efficiency occuring when q7
=
< 1
(4.8)
1. This efficiency factor may be used for both
60
shear and bending in both SLS and ULS conditions. Previously, optimizations were carried out
for the ULS bending condition only, with checks made to ensure compliance with SLS bending
and shear in both cases. Although the goal is to obtain q = 1 for all four cases simultaneously
by varying section parameters, it is possible that full structural effiency may not be achieved
due to various physical or other constraints. To counter this we minimize an efficiency function,
which is defined as:
4
(3-1)2
f =
(4.9)
i=1
By squaring the difference of qj from full efficiency, the efficiency function is convex, such that
a stable minimum exists. It is recommended, however, that such optimization be done with a
spreadsheet program, since the problem necessarily is multi-dimensional in nature.
4.2
Comparisons and Analysis of Design Method
Although the proposed guidelines borrow much from previous recommendations, they do not
produce cross-sections with the same dimensions. The fact that the structural efficiency factors
and an efficiency function are defined mean that a spreadsheet solver may be used to quickly
obtain optimized sections without the need for extensive iteration. It is important, however, to
analyze these guidelines and compare them to previous methods in order to understand what
differences arise and what benefits are achieved.
4.2.1
Comparison Against AFGC Recommendations
As the AFGC recommendations were the first to be implemented for the design of UHPC
structural elements, it shall be the first method to be compared against this newly proposed
MIT method.
Construction of the AFGC Stress-Strain Plots
Design according to the AFGC recommendations begins with calculating the loads and applying
appropriate LRFD loading factors.
Next, one must construct the plot of the stress-strain
diagram for the SLS and ULS stress states, where UHPC requires the use of the strain-hardening
plots. Table 4.1 contains a list of values for DUCTAL, taken from the AFGC recommendations
61
-- AW-5
-
W-
--
Twf-
Description
SI
Young's Modulus
Poisson's ratio
Compressive Strength (with heat treatment)
Tensile Strength
Stress at 0.3 nun crack opening
Length of fibers
E
V
fej
ft3
ab,
Lf
Wl
w -A
4W~t
A60
for DUCTAL
IU
58 GPa
(8412.19 ksi)
0.2
200 MPa
9 MPa
12 MPa
12.7 mm
(29.01 ksi)
(1.31 ksi)
(1.74 ksi)
(0.5 in)
Table 4.1: Recommended values for DUCTAL material parameters according to AFGC
recommendations [4]
45
35
Z
30
25V
--- 8621-862-2
V
--
0
0.2
0.4
0.6
862-3
1
08
12
IA
I8
1.8
2
rdw (-
Figure 4-1: Plot of the stress-crack width relationship for a variety of specimens. [1]
[4]. Note that values for a1 % are not supplied, since its relation to crack width must be obtained
from experiments. Fortunately, such work has been performed by M. Behloul [1], and a graph
of the equivalent stress versus crack width can be seen in Figure 4-1. Thus, for a given crack
width equal to one percent of the total section height the stress is taken as the average of the
values in the figure.
However, an interesting consequence arises from the AFGC definition of the strain associated
62
0
5
10
20
15
25
35
30
[in]
0.20
0.15
0.10
-
--
o--e1%
-b--
elim
0.05
-l
0
00
0.00
0
40
20
60
80
100
Height, H [cm]
Figure 4-2: Variations in E1% and
with a-%, symbolized as
Elin for different values of the total section height, H.
E1%. Recall that the various significant tensile strains are:
Ee =
E
(4.10)
Eij
+ Ee
(4.11)
101g + Ee
(4.12)
W.3
QO.3
'C
E1% =
1C
8
him -
(4.13)
For the 1% case, both the values of the crack width and the characteristic length are proportional
to the height of the cross-section, whereas the other strains are only inversely proportional to
the height. Thus,
E1% is constant for all section heights while the other strains change. It is
therefore possible for E1% to be greater than
Elim or smaller than EO.3 for sufficiently large or
small values of H, respectively. Since our focus is on elements with large section heights, Figure
4-2 demonstrates the changes in E1% and
305 mm (12 inches),
Elim for different heights, H. For values above H =
E1% is greater, and since the stress must be zero at Eli,
design neglects
E1% entirely. On the stress-strain plots, this means stresses proceed linearly from
0- .3 to zero.
This is demonstrated in Figure 4-3, as are the differences between the SLS and ULS stress-
63
10
[ksi]
1.25
.....
WU
a.
--
+-
A FGC (S LS)
1
-.- AFGC (ULS)
6-
0.75
4
-0.5
2
-0.25
l
0.000
0.002
0.004
0.006
0.010
0.008
0.012
0.014
-- 0
0.016
Strain [-]
Figure 4-3: Comparison of the SLS and ULS stress-strain response in tension according to
AFGC guidelines.
strain curves. Note that the ULS curve is the lower of the two, as the partial safety factor,
ybf reduces the stresses from their corresponding SLS values. Also, the strains themselves are
slightly smaller, such that the initial elasticity remains constant.
Section Capacity and Stresses
After construction of the plot, one must calculate a cross-section's bending capacity. Although
the maximum-crack criteria has been explained extensively, the differences in the AFGC
recommendations and the current MIT method are significant.
We recall that this great
stress difference, shown in Figure 4-4, is a consequence on two factors:
recommendations suggest strain softening towards
that the AFGC
Elm, and that the MIT recommendations
suggest that the material is at yielding in a perfectly plastic manner. It is clear, therefore, that
the MIT recommendations will give the engineer greater section capacities.
Also, the MIT recommendations declare that the AFGC limiting total strain,
Elim=
3Lf /8H, is rather the maximum admissible plastic matrix strain, not the maximum admissible
total strain. The total strain is, therefore, a sum of the plastic matrix strain and the elastic
64
12
- - - - - - - - - - - - - - - - - - - - - - - - - - - -
e
[ksi]
1.5
10-
1.25
8
AFGC (ULS)
--
C.
-4--MIT
_
6- -0.75
(4-
-- 0.5
2 0
0.000
0.25
0.002
0.004
0.006
0.008
0.010
0.012
0.014
+0 0
0.016
Strain
Figure 4-4: Tensile stress-strain response for the AFGC ULS and MIT methods.
strain, which is:
3Lf
E2
U fm+ 2
8H
Ko
where E 2 =
(4.14)
E 2 /(Ko) is the elastic strain in the material. As a result, the maximum admissible
total strain is somewhat higher for the current MIT guidelines.
The last important point designwise deals with the semantics of the AFGC plot in bending.
Shear is neglected since the current MIT and AFGC methods do not differ much. Engineers
would typically want the greatest possible amount of stress to be present on a cross-section's
most extreme fibers, since the stress' effect on bending would be maximized. For the AFGC
recommendations this maximum stress occurs at U =
O-x, which has an associated strain
6O.3
<
Eim. So, for design with the AFGC recommendations, this takes the approach of setting
the strain in the bottom-most point of the section equal to EO.3 and solving for the height
of the neutral axis such that the net axial force in the section is zero. For the current MIT
recommendations, the approach is also to set the strain at the bottom-most point such that
the greatest tensile stress acts there, which is equal to
6
1m.
Overall, then, we should expect
greater section capacity with the current MIT recommendations since:
1. Strain hardening and yield exist in the MIT model, whereas in the French model strains
65
soften towards zero.
2. The limiting strain in the MIT model accounts for the elastic strain in the material, and
so is slightly higher than for the AFGC model.
3. Maximum stresses in the material occur at an earlier point in the AFGC model than in
the MIT model.
To illustrate this point, the loading from the design example used by Ms. Park in her Masters
thesis ([8]), Section 3.2.2 shall be applied. Four load conditions were specified per AASHTO
recommendations for highway bridge girders:
1. Self-weight of the bridge girder as a distributed dead load, gi, neglecting the weight of
any longitudinal reinforcement (including prestressing). This is a function of the volume
of the girder and the density of UHPC, p = 2,500 kg/m 3 (0.09 lbf/in3 ).
2. Dead weight of the wearing surface acting on the tributary area of the girder, g2. A
typical value is 1.20 kPa(0.17 psi).
3. Live truck loading, symbolized by a truck which may be placed anywhere on the girder,
and whose tires transmit a force of P
1 =
17.8 kN (4 kips) at the front axle and P
2 =
71.2 kN (16 kips) at the back. The total amount of force applied is Pi = 2P"1+2x (2P 2 ).
4. Distributed live lane loading, uniformly distributed and equal to 951 kg/m (640 lb/ft) for
a standard lane 3.66 m (12 ft) wide. This translates into a pressure, P2, of 2.60 kPa (0.37
psi).
Because this comparison test will allow only the web height and the number of prestressing
tendons to be varied, one may understand that the design moments for the cross-sections
produced by the current MIT and AFGC guidelines will differ from one another. Load factors
are applied according to LRFD standards, as outlined in Equations (3.38) and (3.39).
The section profile assumed here was a two-holed box-section girder, which has rectangular
top and bottom flanges, and three rectangular web pieces that bound two rectangular holes. A
sketch of this section may be seen in Figure 4-5. All parameters except for the web height and
number of prestressing tendons are chosen beforehand, and they are:
66
bTF
dTF
(113)bw
dBF
0
0
bBF
Figure 4-5: Sketch of the two-holed box section girder.
" Span length, L = 24.38 m (80 ft).
" Top and bottom flange widths, bTF and bBF, respectively, which are both taken as 3.67
m (12 ft).
" Top flange depth, dTF
=
101.6 mm (4 in).
" Bottom flange depth, dBF
" Total web width, b,
=
=
203.2 mm (8 in).
254 mm (10 in).
" Prestressing tendon diameter, dT
" Tendon yield strength,
fy
=
15.24 mm (0.6 in).
= 1862 MPa (270 ksi).
" Tendon elastic modulus, ET = 200 GPa (29000 ksi).
Optimized values for both methods are presented in Table 4.2.
As one would expect, the
current MIT method produces designs that are more efficent overall and use less material than
the AFGC recommendations. Thus, not only are the web heights section capacities less, but the
loading moments are as well, since they depend linearly on the cross-sectional area of the girder.
Finally, one notices that for both methods only one limit state has reached 100% efficiency in
bending. For the AFGC method, this reflects the fact that the ULS stress-strain behavior in
tension is reduced by a partial safety factor with respect to the SLS plot. In the case of the
67
Description
Method
AFGC
MIT
dw
N
P
Web depth in cm (in)
Number of prestressing tendons
Prestress force in MN (kips)
71.12 (28.0)
16
4.23 (950)
63.25 (24.9)
16
4.23 (950)
MLd
MC
SLS design moment in MN-m (kip-ft)
SLS moment capacity in MN-m (kip-ft)
SLS efficiency
ULS design moment in MN-m (kip-ft)
ULS moment capacity in MN-m (kip-ft)
ULS efficiency
4.913 (3624)
8.958 (6607)
54.8
8.318 (6135)
8.318 (6135)
100.0
4.877 (3597)
4.877 (3597)
100.0
7
7SLS
M7aT
LL
?7ULS
8.273 (6102)
9.135 (6738)
90.6
Table 4.2: Optimized web height, prestress, and efficiencies for the current MIT and AFGC
methods.
-4
-3.5
-3
-2.5
-2
-1.5
-1
-0.5
0
0.5
1
[ksi]
0.90.80.7-
0.5-
U
4-
-MIT
0.3
-AFGC
Co
E
0.2-
0
Z
0.1
-30.0
-25.0
-20.0
-15.0
-10.0
-5.0
0.2- 0.1
0.0
I)
-
5.0
1
10.0
Stress [MPa]
Figure 4-6: Stresses in the cross section according to AFGC and MIT design methods for the
serviceability limit state.
current MIT method, this reflects the fact that a no-cracking criterion exists for the service
limit state, which is the limiting factor in optimization.
We can see more by taking a look at the distribution of stresses and strains along the height
of the cross-section. Figure 4-6 shows the stresses for the serviceability limit state according
to the AFGC and current MIT design methods. By definition, plane sections remain plane
for both methods. One readily understands that the SLS conditions are the limiting factor for
68
-8
-7
-6
-5
-4
-3
-2
0
-1
N
1
2
[ksi]
0.90.8 -
0.7 0
0.5
-
%
0.4 0.3 -
MIT
E
0
-
- AFGC
0.2 -
z
0.1 A
-60.0
-50.0
-40.0
-30.0
-20.0
-10.0
_________
0.0
10.0
20.0
Stress [MPa]
Figure 4-7: Stresses in the cross section according to AFGC and MIT design methods for the
ultimate limit state.
the efficiency of cross-sections designed using the proposed recommendations. Also, while the
AFGC recommendations offer greater tensile capacity, it is at the price of having the material
crack under everyday loading. If one recalls the material model (Figure 2-3), it is understood
that cracking transfers the majority of the internal stresses to the fibers, and the initial capacity
of the matrix is lost.
Next are the distributions for the ULS case for both methods, shown in Figure 4-7. It is
clear that the MIT method offers much more tensile capacity in the section than the AFGC
method does as a result of the use of the material model over the AFGC plot (see Section
3.1.1).
Also, because the AFGC applied a partial safety factor only for the ULS state (see
Sections 3.1.4 and 3.1.7), it limits the efficiency for the AFGC design. Indeed, if one compares
the stresses in the section for both the SLS and ULS cases, one sees that the AFGC methods
have approximately the same amount of tensile stress. Meanwhile, the MIT method makes a
clear distinction between the two limit states, and the stresses are accordingly different.
The MIT method, therefore, represents an advancement in the understanding of the behavior
of UHPC as well as how to design for it. This is not to say that the AFGC does not produce
cross-sections with sufficient capacity; rather, they do not take full advantage of the load
69
capabilities offered by the material behavior. Indeed, we recognize that their concept of criteria
based on maximum crack width is an essential development in codified design. However, now
that it is known how the matrix loses significant capacity once fracture has occurred, it makes
sense to change the SLS criterion to that of "no cracking." Also, given our new understanding of
the behavior, it is better that we apply safety factors to the calculated section capacity instead
of penalizing the stress-strain behavior of the material. Thus, we can produce more efficient
sections using a more refined design method.
4.2.2
Comparison Against Previous MIT Method
We now move from a comparison with the AFGC recommendations to one with the previous
MIT guidelines. The advantages of the proposed method over the previous MIT guidelines (see
Section 3.2) method are:
" Multiple sectional parameters may be varied, yet the optimization may be easily identified
by the dimensionless efficiency factor, q.
" Attention is paid to all four limit and load cases (bending and shear in both ULS and
SLS) instead of only one. As a result overall efficiency is higher.
" Prestressing is properly addressed so that the structural member will not crack during
installation.
We begin by addressing the issue of increased efficiency. Figure 4.2.2 compares the designs
produced by the current method against those produced by the previous method. Material
properties are the same as those for DUCTAL, and the only variable is the height of the
section.
Cross-Section Dimensions
For both cases the other section dimensions are:
* Slab thickness and width, represented by d, and b, respectively. t, is taken as 10.16 cm
(4 in), and b as 3.66 m (12 ft). The width is equal to the standard width of a car lane,
while the slab thickness has been determined to be the most efficient
70
[8].
70
100
90
80
120
110
250
[in]
|0
80
200
E
60
'150
Z
0
100
-
0
-o
P = 1000 k (prev.)
0
P= 1500 k (prev.)
P= 1000 k (cur.)
P= 1500 k (cur.)
----
o
50
A
20
25
30
20
P= 1000 k (corr.)
----
0
40
35
P= 1500 k (corr.)
40
Span [m]
Figure 4-8: Comparison of the total section heights obtained with the current MIT design
method with those reported by Ms. Park. [8]
" Bottom flange thickness and width, represented by dBF and bBF, respectively. dBF is
taken as 15.24 cm (6 in), and bBF as 91.44 cm (36 in).
" Total web width, bw, equal to 15.24 cm (6 in), as chosen by Ms. Park in her thesis [8].
Both had the same amount of loading moment and prestressing force applied. Optimizations
were then performed, one according to the previous recommendations and another according
to current methods.
Optimization Results
In Figure 4.2.2, the upper sets of curves are associated with the lower prestressing force, as
it would require greater section height to compensate. A reduction factor for section capacity
was neglected in the optimization method of the previous recommendations. Therefore, it is
noted that the long dashed lines (series "previous, corr.") follow these corrected values, the
short dashed lines (series "previous") the values from the previous method as originally reported,
and the solid lines (series "current") the values obtained from the current optimization method.
Overall, it is clear that the current method yields more efficient designs than the previous one,
71
100 90U
70
i
|
100
i
1
1
110
i
120
i
[ft]
a SLS, moment(cur.)
X SLS, shear (cur.)
* SLS. moment (prev.)
X
70-
+
60-
90
X
80 >
C
80
+
+
50_
+ SLS, shear (prev.)
*X
+
X
+
40-
X
+
X
+
+
X
+
X
+
X
30
20
25
30
35
40
Span Length, L [m]
Figure 4-9: SLS bending and shear efficiencies for both the current and previous MIT methods
versus span length, L.
resulting in section heights that are between 10 to 15 cm (4 to 6 in) less.
Next, the efficiencies of the designs produced by the two methods is compared. Results are
shown in Figure 4-9, with the upper-most set of data points corresponding to sections with lower
prestress force, and with span lengths increasing from left to right. As one may expect, there
is a signficant increase in efficiency over the previous method in both bending and shear for
SLS conditions. However, this gain in efficiency for shear decreases dramatically with increased
span length in shear, but less so for bending. Indeed, efficiency in shear overall drops as span
length increases.
Efficiencies are significantly better if one is able to vary more than just one parameter.
Figure 4-10 shows the efficiencies produced if: (1) the web height is the only variable parameter,
and (2) the web height, dw, web width, bw, and number of prestressing tendons, N (and thus
the prestressing force), are allowed to vary. Note that efficiency in both shear and bending for
the ULS conditions are at 100%, and the SLS efficiency never dips below 70%. Also, there is
no improvement in SLS bending efficiency, but SLS shear efficiency increases with span length.
Ms. Park's original intent was to create a method that would produce a rough estimate
of an ideal section height given that the other dimensions were already known. The proposed
72
70
80
110
90
100
i
+
110
120
[ft]
i
X
SLS, moment (1)
90-
A ULS, moment (1)
>80-
* SLS, shear (1)
X ULS, shear (1)
Q
x
70U~ 7.
OSLS, moment (2)
A ULS, moment (2)
o SLS, shear (2)
SX
X
60-
X ULS, shear (2)
5040
20
25
30
35
40
Span Length, L [m]
Figure 4-10: Efficiencies obtained if: (1) only the web height is allowed to vary; (2) if the web
height, web width, and number of prestressing tendons may vary.
design method seeks to give more than a rough estimate, and handle multiple design variables
at once. It is clear that the proposed method can produce more efficient designs, especially if
more parameters than the web height are allowed to vary. Next we explore the
4.2.3
Exploration of Size Effect
In their decision to use a crack width criterion, the AFGC introduced a length scale into the
criteria for UHPC section design. As a consequence, the value of the criteria varies with section
height, which in turn causes variation in the effective stresses in the extreme ends of the crosssection. Since the limiting strain is inversely proportion to section height, one would expect to
see much higher stresses for smaller cross-section heights. Here, the AFGC recommendations,
which first stipulated a crack criterion, will be compared against the proposed MIT methods
to see if such a size effect exists.
For this analysis, a simple beam of rectangular cross-section was considered. Only its width,
B, did not change throughout, though the span, L, the location of the prestress/reinforcement
from the bottom, YT, and the section height, H, did. In all cases the height was one-quarter
of the span, and the reinforcement location one-sixth of the height from the bottom. For the
73
prestressed and reinforced cases two tendons were used. A macro was coded into the spreadsheet
which would iterate through values of the curvature,
x,
for the section and vary the location of
the centroid until the net axial force was zero, with the maximum strain in the section obeying
the ULS crack criteria for AFGC and MIT methods. When the axial force was equilibrated, the
moment produced in the section by the curvature was recorded. As the curvature, X, increases,
so do values for the moment produced, until a curvature is applied such that either the crack
criterion is violated or a position for the neutral axis does not exist that can equilibrate the
stresses. The moment capacity of the section is realized just before this breakdown.
This
moment is then divided by We", the elastic section modulus, to produce the maximum effective
stress, Onlax. In Figures 4-11 and 4-12, we see the results of this size effect analysis for both the
AFGC and MIT methods, where the streses are in units of MPa and the heights are in units of
centimeters.
As mentioned in the beginning of this section, the crack criteria introduces a length scale, in
addition to the structural size, which causes the stresses at the extreme end of the cross-section
to vary non-linearly with section height. According to linear elastic fracture mechanics, the
ideal fracture size effect corresponding to elastic-brittle behavior is proportional to the inverse
square root of the height. Thus, the resulting plot of stress versus section height should, ideally,
have an exponent of -0.5. In contrast, a model without any size effect should have an exponent
of zero. To this end, both graphs have power-law trendlines traced through the data points,
which appear in the logarithmic graph as straight lines, and their equations are given. For both
the prestressed and reinforced cases, both design methods exhibit a considerable size effect.
Effective stresses are much higher at smaller length scales, and for all three types of UHPC
they reach an asymptotic value as the height of the section increases. We compare first the two
with the most dramatic difference: the behavior for unreinforced UHPC. As is clear in Figure
4.2.3, the exponent for the AFGC recommendations does not reach a significant digit until the
third decimal place. So, for unreinforced UHPC there is no size effect discernible in the AFGC
recommendations. We can explain this by recalling that, for the AFGC, the stress is always
zero when
E = Eum, and that the maximum stress in the AFGC plot in tension is always equal
to cUbt. In contrast, the maximum stress is not constant for the MIT recommendations, as it
occurs wherever
Eli, lies. Therefore, we see an exponent two orders of magnitude greater and
74
1000 -- O-AFGC (pres)
-0-AFGC (reint)
--A-AFGC (unre)
0
y = 113 31 x .21
100 1
x
rv
y = 10-.64x0.
E
y= 13.54x-.21
y =20.9!58x-0-0
10-
1
1
10
100
1C00
10000
100000
log H (cm]
Figure 4-11: Size effect inherent in the AFGC recommendations for prestressed, reinforced, and
unreinforced UHPC.
1000-
a30MIT (pres)
100
-
y = 80.07x-0.2
(reint)
-i-MIT (unre)
y = 217.29x
CL
y = 52.89x-0.17
10Cn
1
'
1
10
100
1000
10000
100000
log H [cmn]
Figure 4-12: Size effect inherent in the current MIT recommendations for prestressed,
reinforced, and unreinforced UHPC.
75
100 -
-c- AFGC
-t--MIT
100y
10 -
1
20.968x 000'
y = 52.89x-0 ' 7
10
100
1000
10000
100000
log H [cm]
Figure 4-13: Comparison between the size effects according to the AFGC and MIT
recommendations for unreinforced UHPC.
on the same order of magnitude as the ideal value.
To understand why the ideal value is not reached, the think model of Figure 2-2 is recalled.
It is understood that the model is a strength-based model and thus defined by a set of stressstrain points that are invariant with section height or other length scales. Hence, a slope of
roughly -1/5 to -1/3 is observed because of the interaction of the crack opening criterion, which
is converted into a dimensionless strain through division by two-thirds of the section height,
with the analytical UHPC material model. Interestingly enough, the behavior is similar to nonlinear fracturing materials in which plastic mechanisms add to the material's energy dissipation.
Ergo, the characteristic size effect matches its brittle-plastic dissipative behavior; fiber slippage,
debonding, and yielding provide more opportunities for energy release in addition to matrix
fracture. This is in line with the material's observed ductility (see Chapter 2).
We now move onto the case of reinforced and prestressed UHPC, whose plots of maximum
effective stress versus total height may be found in Figures 4-14 and 4-15.
For the AFGC
recommendations, we note that the same exponent of -0.21 exists for both the reinforced and
prestressed cases, whereas the proposed MIT guidelines show exponents of -0.23 and -0.35 for
reinforced and prestressed UHPC, respectively.
76
Typically, the reason to add reinforcement
to a concrete section is to increase its ductility and capacity, so it is odd that we should find
exponents closer to the ideal fracture case. This inconsistency exists for both recommendations,
and needs to be more fully explored.
On the other hand, the exponents for the prestressed material are more consistent with
expectations. Prestressing tendons are typically made of high-strength steel, which accordingly
have low ductility. Upon reaching their strength limit rupture occurs suddenly, unlike standard
reinforcing steel, which is more ductile. During the tests conducted by the Federal Highway
Administration [8] (see boxed paragraph in Section 5.2), it was found that structural failure
occured due to bond failure in the prestressing tendons.
The lesson of the size effect is that sections with smaller dimensions handle stresses better
than bulkier ones. For applications in bending, this means that one would want to use thin
flanges, and avoid sections with large masses of solid material. This is consistent with the
characteristics of UHPC, where the fiber orientation of the pouring phase is much easier to
control for thin elements.
Therefore, thin sections have more reliable properties, and the
engineer should strive to use small dimensions wherever possible.
77
1000 -
-o-
AFGC
MIT
100
E
-0y = 113.310.x
10
0
y = 217.29x 0 .
1
'
1
10
100
1000
10000
100000
log H [cm]
Figure 4-14: Comparison between the size effects according to the AFGC and MIT
recommendations for prestressed UHPC.
1000 -0AFGC
-6--MIT
Power (AFGC)
I.
1
-,
Power (MIT)
--
y = 108.64x -.
-10 -
y = 80.07x" 23
1
1
10
100
1000
10000
100000
log H [cm]
Figure 4-15: Comparison between the size effects according to the AFGC and MIT
recommendations for reinforced UHPC.
78
4.2.4
Sensitivity of Design Method
Clearly, it is best to optimize for multiple section parameters than for only the web height,
but variation in some parameters has more of an effect than others. The next question is how
sensitive the efficiency is to changes in different parameters from a reference optimized section.
Initial Optimized Section
The parameters considered are the same as those in the discretized cross-section, and are varied
from optimized design values. Relevant boundary conditions to the problem were:
" Span length, L= 30.48 m (100 ft)
" Prestress tendon diameter, dp = 1.52 cm (0.6 in)
Optimized section parameters are:
* Number of prestress tendons, N = 36
" Width of web, b, = 45.72 cm (18 in)
" Depth of web, d,
=
69.42 cm (27.33 in)
" Width of top flange, bTF
=
189.74 cm (74.7 in)
" Width of bottom flange, bBF = 189.74 cm (74.7 in)
" Depth of top flange, dTF = 15.24 cm (6 in)
" Depth of bottom flange, dBF = 15.24 cm (6 in)
Least Critical Parameters
We begin with the least critical parameters.
Figure 4-16 charts the effect of variations in
bTF on the efficiency in SLS and ULS bending, provided that all other parameters are held
constant. As one would expect in bending, changing the width of the top flange only has no
appreciable effect. Indeed, Figure 4-17 demonstrates that not even varying the width of both
flanges simultaneously evokes much of a change in efficiency. This is so because the widths of
79
68
I
101
100.5
70
I
72
I
74
I
76
I
78
I
80
I
82
I
-
100LU
99.5
-
99.
170
175
180
185
190
195
200
205
210
Top Flange Width [cm]
Figure 4-16: Sensitivity of ULS and SLS bending efficiency to changes in top flange width.
68
I
101
70
I
76
I
74
72
I
78
I
82 [in]
I
80
I
100.5
r"
IF
100
III
99.5
99
170
175
180
185
190
195
200
205
210
Top and Bottom Flange Width [cm]
Figure 4-17: Sensitivity of ULS and SLS bending efficiency to simultaneous and equal changes
in top and bottom flange widths.
80
1 50 -
18
22
26
30
34
38
42
46
I
I
I
I
-
I
I
I
140 .,
50
54
58
62
|
I
I
I
150
160
170
66 [in]
-o-SLS
130-
120W
110-
100
90
40
50
60
70
80
90
100
110
120
130
140
Web Width [cm]
Figure 4-18: Sensitivity of ULS and SLS bending efficiency to changes in web width.
the flanges are so much greater than the depths. So, an increase in width of an inch will not
add much material to the cross section, while an increase in depth by an inch will add far more.
The next least-important factor is the width of the web.
Since the web's importance is
primarily to set the distance between the two flanges (and thus their moment arm), one would
expect that only the web depth would have an effect. In Figure 4.2.4, we see that this is the
case only for the ULS condition, and that SLS bending has an almost linear dependence on
the web width. ULS bending occurs at severe loads, and in such cases the strength capacity of
the web is insignificant. For the lesser loads of SLS conditions, the stresses in the web have a
proportionately larger effect. Therefore, as the area in the web depends linearly on the width,
so too does the stress, and in turn the bending capacity.
Medium-Critical Parameters
Next are parameters with more of an effect. The first of these is the depth of the top flange. As
mentioned before, changes in this parameter proves to have much more of an effect than changes
in flange width. One can see this effect in Figure 4-19. If the depths of both the bottom and
top flanges are varied simultaneously and by the same amount, one would see double the effect
81
6
8
10
105-
12
14
16
18
20
22
I
I
I
I
I
I
30
35
40
45
50
[in]
1001
95U
LL-I
w
90
-
85-
O
i.I
15
20
25
55
60
Top Flange Depth [cm]
Figure 4-19: Sensitivity of ULS and SLS bending efficiency to changes in top flange depth.
105
6
8
10
I
I
I
12
14
16
18
20
22
I
I
I
I
I
100
[in]
-o- SLS
95
90
85
80
E
w
75
70
65
60
55
15
20
25
30
35
40
45
50
55
60
Bottom and Top Flange Depth [cm]
Figure 4-20: Sensitivity of ULS and SLS bending efficiency to simultaneous and equal changes
in top and bottom flange depth.
82
than before, as shown in Figure 4-20. Also, one may notice how changes in SLS efficiency are
roughly linear, while those of the ULS condition are nonlinear. The reason is that the depths
dictate the amount of composite material, which under SLS conditions remains intact but under
ULS conditions has fractured on the tension face. Thus, the nonlinearity in the variation is a
direct consequence of the ULS-induced postcracking behavior of the material.
Most Sensitive Parameters
One of the more sensitive parameters is the number of prestressing tendons. Given that one
prestressing tendon supplies, in this example, roughly 0.27 MN (61 kips) of force, and that
the tendons are carried by the bottom flange, it is no surprise that they have such an effect
on bending capacity. Exactly how much of an effect is demonstrated in Figure 4-21. Since
the tendons do not become plastic in either the SLS or ULS cases, and since each tendon
is assumed to be added at the same distance away from the neutral axis, there is a linear
relationship between efficiency and the nuber of tendons.
The last parameter to be examined is the height of the web, which, as stated above, sets
the separation distance between the two flanges. Its relation to bending efficiency is shown in
Figure 4-22.
83
120
116 110
-
s
-
1
100
--o-SLS
-- >- ULS
-
3 9590
Rn
80
28
30
32
34
36
38
40
42
44
46
Number of Prestressing Tendons [-
Figure 4-21: Sensitivity of ULS and SLS bending efficiency to changes in the number of
prestressing tendons.
20
22
24
28
26
30
32
34
[in]
130125 -
120 115 110
U
0)
-
-4J-
105 -
SLS
_ -- _ ULS
E 10095-
9085-
oU
-i
50
III
55
60
65
70
75
80
85
90
Web Depth [cm]
Figure 4-22: Sensitivity of ULS and SLS bending efficiency to changes in web depth.
84
Figure 4-23: Drawings of the different cross-section types analyzed. From left to right: doubletee, girder, box section.
4.3
Optimization According to Proposed Methods
With the comparisons and sensitivity analysis out of the way, we now turn to applying the
current MIT guidelines to other problems and investigations. Specifically in this section there
will be focus on comparing the efficiencies of different girder cross sections.
4.3.1
Comparison of Different Cross Sections
Earlier in this work the effect of variations in different section parameters on structural efficiency
was examined.
Now, our attention turns to understanding what such efficiency implies for
girders that have different cross-sectional shapes. Even though a section may be optimized
to maximum structural efficiency, this does not necessarily translate into maximum material
efficiency. Much is owed to the work of Luca Sorelli and Marcos DeJesus, who contributed
much to the exploration and analysis.
Three cross-sectional shapes will be considered for this analysis. First is a double-tee (pisection), whose properties were first examined by Ms. Park. Second is a standard girder (Isection), which is in widespread use today in highway bridges. Third is a box section, which is
the newest cross-section to be analyzed. All three appear in Figure 4-23 from left to right. For
a typical two-lane bridge, it is declared that either four standard girders, two box sections, or
three double-tee sections are required to span the width. For simplicity, we shall consider only
the loading for one lane 3.57 meters (12 feet) wide, which corresponds to two girders, one box
section, or one-and-a-half double-tees. We also shall afford the double-tee and girder sections
two layers of prestressing tendons, since their bottom flanges are so much smaller than the box
section.
85
Cross-Section Parameters and Constraints
In this analysis, different parameters were allowed to vary depending on the type of cross-section
used. For the box section, the width of the top and bottom flanges were held constant at 3.57
meters (12 feet). Other parameters had minimum requirements, and they are:
" The number of prestressing tendons must be enough to allow four inches of center-tocenter spacing between them.
" The bottom flange had to be at least 127 mm (5 inches) thick to contain the tendons.
" The top flange must be at least 101.6 mm (4 inches) thick, as this was found to be an
optimal thickness for the road deck. [8]
" The web width must be at least 228.6 mm (9 inches) wide, as it was considered that no
individual web width portion should be less than 76.2 mm (3 inches) wide.
In sum, for the box section all parameters were allowed to vary except for the flange widths,
with lower bound limits applied to other important parameters.
The girder required more numerous conditions. First, it was assumed that the top and
bottom flanges have identical widths and heights. Second, since the width tapers from the
flanges to the web, this diagonal section was discretized as a rectangle whose width is half the
sum of the flange and web widths, and whose height is equal to the flange height. A sketch
of this discretization may be seen in Figure 3-5, where W
=
3.57 m (12 feet) is the effective
slab width of the concrete decking and t = 203.2 mm (8 inches) its thickness. This decking is
required since the girders do not have a built-in roadway surface the way the box and double-tee
sections do. For this analysis the deck for the girders was assumed to be made of normal-weight
concrete and its contribution to section capacity was considered. A similar treatment for the
girder exists in the Cat Point Creek white paper (110], Section 3.3). Normal-weight concrete
is commonly used as a decking material, and it is instructive to compare this girder-and-slab
setup with the other UHPC-only sections, whose slab is integrated with the cross-section. Other
conditions were lower-bound limits:
* The height of the discretized tapers could not be less than 101.6 mm (4 inches) for the
upper taper and 127 mm (5 inches) for the lower taper. Bounds are different since the
86
lower taper contains the second row of prestressing tendons and the upper one carries
none.
" The number of prestressing tendons may not be more than what can be properly contained
in discretized tapers.
" The widths of the flanges could not be less than 952.5 mm (37.5 inches), at which point
the two girders' flanges would sum to a little over half the effective slab width.
" The web width should be at least 228.6 mm (9 inches) wide.
Next are the constraints on the double-tee. Because its bottom flange width is so small in
relation to its top flange, and to make a more competitive comparison between sections, the
double-tee was also allowed to have two layers of prestressing tendons. As a result, its bottom
flange is afforded at least twice the height of the box section. The only fixed constraint is that
the sum of the top flanges be 3.57 meters (12 feet) wide. Lower-bound limits include:
* The top flange must not be less than 101.6 mm (4 inches) thick.
" Each web portion must not be less than 76.2 mm (3 inches) wide, resulting in a total
width that is no less than 228.6 mm (9 inches).
" The total width of the bottom flange may not be less than 2.69 m (106 inches), which
means that the individual bottom flange portions must be at least (71 inches) wide.
" The total height of the bottom flange must be at least 254 mm (10 inches) to accomodate
two rows of prestressing.
Live Load Distribution Factor
Though not part of the proposed design recommendations, it was deemed appropriate to
incorporate a live-load design factor (LDF) as stipulated in the LRFD design for highway
bridge girders.[2] These reflect the fact, if one were to examine the cross-section of the entire
bridge and road surface, that the slab and girder system is structurally indeterminate. As a
result, the loads on the road deck are not distributed equally across the girders. Empirical
testing has yielded a set of formulas for calculating the LDF for moment and shear (symbolized
87
as DFM and DFV, respectively), for the case of one-lane or multi-lane roads. Although our
design method deals with a half-bridge (one lane), the complete bridge is expected to be two
lanes wide. Thus, the distribution factors are:
DFM =0.075 +
S0.075
DFV = 0.2 +
= 0.2 +
)
0.6 () L 0.2
31.2
(0s
S
39.4
S
2
.f
for SI units
(4.15)
.(S)9.5
+
O
K
0.144LD3
12LD3
L
114.8
(S)2
35
2for
for IU units
SI units
(.6
for IU units
where S is the center-to-center girder spacing in meters (feet), L is the girder span length in
meters (feet), t, is the slab thickness in millimeters (inches), and Kg is the longitudinal stiffness
of the simply-supported girder at midspan. The last parameter, Kg, is equal to:
K 9 = n(I + Ae 2)
(4.17)
where n = E,/Ko is the modular ratio between steel and concrete, I is the girder moment of
inertia in millimeters (inches), A is the girder cross-sectional area in millimeters (inches), and
e is the eccentricity between the centroids of the girder and slab in millimeters (inches). The
portion of the live loading assumed by the half-bridge is then the moment or shear per lane
multiplied by the number of girders and the corresponding LDF. It should be noted that these
factors are a function of the cross-section parameters, and so may require extra iterative design
steps.
Per its very definition and the quantities involved, load distribution factors as defined by
Equations (4.15) and (4.16) are meant to be used only for prismatic slab-on-girder bridges. In
other words, cross-sections of any other geometry or with road surfaces that change in width
or curve, are not meant to use these distribution factors.
For such irregular cross-sections,
finite element analysis is generally necessary to determine how much more load is carried by
the interior girders than expected.[6]
We do not perform any such finite element simulation to determine the load distribution
88
LL
F_
: V I" cl
(a)
4
........
..
(b)
Figure 4-24: Sketch of how (a) double-tee and (b) box sections are split into equivalent girders
for LDF calculations.
Section Type
Span Length (L)
24.4 m
27.4 m
30.5 m
33.5 m
36.6 m
Box
DFM
DFV
DFM
DFV
DFM
DFV
(80 ft)
0.778
0.672
0.593
0.521
0.601
0.672
(90 ft)
0.754
0.672
0.571
0.521
0.599
0.672
(100 ft)
0.731
0.672
0.551
0.521
0.599
0.672
(110 ft)
0.711
0.672
0.538
0.521
0.599
0.672
(120 ft)
0.708
0.672
0.533
0.521
0.600
0.672
Double-Tee
Girder
Table 4.3: Calculated load distribution factors for the box, double-tee, and girder cross-sections.
factor, and simply assume that Equations (4.15) and (4.16) can be applied as-is. Our reasons
for doing so are:
1. In our one-dimensional design method, the cross-section is treated as a discretized girder,
regardless of the shape of the cross-section. Given that all cross-sections are, therefore,
treated alike, we thought that it would be proper to apply the LDF without modification.
2. All cross-sections compared herein are prismatic, and so neither change width nor curve
with the span length.
For these reasons, we chose to divide the cross-sections up into "equivalent girders" when
calculating the LDF. Figure 4.24(a) demonstrates this division for the double-tee section and
4.24(b) for the box section; essentially, wherever the web connects the top and bottom flanges is
where the center of an equivalent girder lies. So, for the double-tee the center of this equivalent
girder is where the flanges of adjacent double-tee sections meet, and its live loading is multiplied
by LDF x 1.5, since there are one-and-a-half equivalent girders.
For the box section, an
equivalent girder is centered at every web portion, and so has two equivalent girders, resulting
in twice its LDF. Values obtained for the LDFs produced through optimization are reported
89
in Table 4.3.1. We note that the box section has the highest DFM values, although its DFV
values are equal to those of the double-tee. This is because, for optimized cross-sections, the
eccentricity, e, and therefore the longitudinal stiffness, Kg is greater than that of the others.
Optimization analyses were then performed for each cross section for length spans ranging
from 24.38 to 36.58 meters (80 to 120 feet). The results demonstrating the average efficiency
(sum of bending and shear efficiencies divided by four) for the girders is shown in Figure 4-25.
Note that all sections achieve an average efficiency of above 90 percent. Of the three, the pisection is shown to be the most structurally efficient, with the box section reaching maximum
efficiency in the roughly 27.5 to 33.5 meter (90 to 110 feet) range. Finally, we see that while
the girder is not as efficient for shorter spans, it improves as the span length increases. Next
we look at the span-to-height (L/H) ratios of these sections, shown in Figure 4-26. Although
the box section was second in efficiency to the double-tee, its span-to-length ratios are much
higher, which produces higher clearances. Furthermore, as the spans increase the ratios for
the box and double-tee section fall, but those of the girder rise, and surpass both the box and
double-tee at 35.7 meters (120 feet). So, even though the girder is the least structurally efficient
of the designs considered, it requires a lesser section height than the other two at long spans.
Following structural efficiency and span-to-height ratios, we want to know the volume of
material each optimized section consumes. After all, cost is an important factor in design,
and if it turns out that a girder design is not structurally efficient but uses less material, it
may be implemented in the structure anyway. Figure 4-27 compares the volume consumed by
each section against its span length. It is interesting to note that both the box and doubletee sections require the same amount of material, even though the double-tee is the most
structurally efficient of the two. However, the real surprise is the fact that the girder consumes
roughly one-third less UHPC material than the others. Possible reasons are:
1. The girder does not require a top flange that supports the roadway, instead supports a
concrete deck above.
2. The bending efficiency is handled mostly by the prestress, while the material ensures
efficiency in shear.
We can check these hypotheses by plotting the amount of prestressing force required versus
90
70
i
100
80
90
100
110
120
[ft]
95-
-*-box
9
-o85
double-tee
-)-girder
85-
80
75
20
25
30
35
40
Bridge span L [m]
Figure 4-25: Average efficiencies for different section shapes.
35
70
80
I
I
90
100
110
120
I
|
|
33-
box
double-tee
-
31 -
[ft]
-o-
girder
2927 -
z
~O.
250-
-
23 21 -
-
19 1715
20
25
30
35
40
Bridge span L [m]
Figure 4-26: Span length, L, to total section height, H, for different section geometries.
91
70
2.0
--
1.8-
1.6 -
80
90
100
i|
i
i
-6-box section
--double-tee
girder (w/o deck)
-xgirder (w/ deck)
-
110
120
|
|
[ift]
[in]
-
20
- 18
X
-
16
1.4 - 14
1.2 - 12
1.0-
0.8 -
10
+-8
-
0.6
20
30
25
40
35
Bridge span L [m]
Figure 4-27: Volume of UHPC consumed for optimized sections versus span length.
70
15-
1
80
~
90
100
110
-v
-i-
+box
120
[ft]
[kip]
141312-
-3000
double-tee
-o-K-girder
U..
ca
.
-- - 0-
-
A
11 -
-
2500
10'I
0.
9-
-2000
8-
7-
-
1500
6-
5-20
25
30
35
40
Bridge span L [m]
Figure 4-28: Amount of prestressing required for different optimized sections versus span length.
92
the span length, as shown in Figure 4-28. Interestingly enough, both the box and double-tee
sections require roughly the same amount of prestressing for all spans. The girder, on the other
hand, requires much less for shorter spans yet increases as span increases. The fact that the
girder does not have the deck integrated into its section design seems a likely reason for its
frugal use of UHPC material.
4.4
Chapter Summary
The reader has now been introduced to the current MTI design recommendations for UHPC. We
began with defining the design criteria along with the efficiency factors and efficiency function
(see Section 4.1). Then, the guidelines were compared against the AFGC recommendations
(available in Section 3.1) in Section 4.2.1.
We saw how the proposed guidelines disallow
cracking in the serviceability limit state, which keeps the matrix intact and takes advantage
of its cohesion. Also, the analytical model used by the proposed methods allow for greater
section capacity in the ultimate limit state. As a result, the proposed guidelines offer better
performance in disallowing permanent damage under everyday loading and allowing section
designs overall to be more efficient.
In Section 4.2.2, the designs produced by the efficiency function were tested against the
optimized values reported by Ms. Park. Here, too, we saw a benefit in terms of structural
efficiency with decreased cross-section height.
These benefits were magnified if multiple
parameters were allowed to vary instead of only the web height. It is understood, then, that
given the power of modern-day computing, multi-variable optimization is possible and can
produce optimized cross-sections that are better than those of the previous method.
Next, in Section 4.2.3 we explored the presence of a size effect, and compared it against
the size effects predicted by the AFGC recommendations. Indeed, a size effect is inadvertently
introduced through the crack criteria, and can be seen in the proposed MIT guidelines for
unreinforced, reinforced, and prestressed UHPC, though the AFGC methods predict such size
effects only for reinforced and prestressed material. Explanations related the size effect to the
material's dissipation capacity, though inconsistencies between the unreinforced and reinforced
cases merit further investigation. Regardless, it can be agreed upon that thinner elements have
93
more reliable properties.
Sensitivity of the bending efficiency for both the ultimate and service limit states were then
explored in Section 4.2.4. Each parameter was tweaked individually, with the exception of two
instances where the widths and depths of the top and bottom flanges were varied simultaneously.
Per the shape of the box section girder considered, it is understood that variations in the widths
of the flanges had very little effect on the efficiency, though the width of the web had some
effect on SLS bending efficiency. Variations in the depths of the flanges had more of an effect,
since they contributed or subtracted more material to the moment capacity. Ultimately, it was
shown that there is high sensitivity to the height of the web and the number of prestressing
tendons. This is to be expected, since the web height dictates the moment arm length for
the major compressive and tensile forces in the top and bottom flanges, respectively, and the
number of prestressing tendons provide a counter moment to increase section capacity.
Lastly, the guidelines were used in order to perform an analysis of three cross-sectional
shapes. In Figures 4-12 through 4-15, we have seen clearly that the traditional girder crosssection is the least desirable of the shapes in terms of efficiency, span-to-height ratio, and area
of material used per unit length if the concrete decking is included. Regardless, it did require
less area of UHPC material and a lower prestress force. The box and double-tee sections were
roughly equal to each other, as both had high efficiencies and required less total material.
However, the box section was able to achieve higher span-to-height ratios, and so would be
well-suited for applications where clearance is an issue.
With this chapter completed, we now move onto exploring the three-dimensional behavior
of the material model, which is useful for finite element simulations.
94
Chapter 5
3-D UHPC Modeling
When designing for critical projects such as bridges, it is frequently not enough to have a
simplified design method; one must produce a refined analysis demonstrating the safety of the
structure. With the computational power available in modern society, this work is the domain
of finite element analysis. Two and three-dimensional simulations require a material model that
is capable of handling extra dimensions and linkages. This in turn will engage greater material
stiffness, since there are bi- and tri-axial effects that are not captured by the 1-D model of
Section 2.1.
In this section, the reader is introduced to the three-dimensional material model, where
the scalar quantities of the think-model in Section 2.1.2 are exchanged for their tensorial
counterparts. Constitutive relations, the strength domain, and plasticity are likewise extended,
capturing effects in all principal directions. Comparisons are then made between the 1-D and
3-D stress-strain response, with the key discovery being the presence of secondary hardening in
the 3-D solution. Next, it is shown that designs produced by the 1-D model are conservative
relative to the simulated 3-D behavior, and this aspect is used to validate the proposed design
recommendations of Section 4.1.
This chapter then closes with a dynamic analysis of an
optimized box-section girder.
95
5.1
3-D UHPC Model
We have probed the 1-D model and gained significant insights into the workings of the material
and its phases. Such a model is only useful for one-dimensional considerations, and so is not
suitable for sophisticated finite-element analysis. Once again, the starting point is the ClausiusDuhem inequality:
<pdt = E : dE - dT ;> 0
(5.1)
where E : dE represents the external work supply in 3-D. The free energy is still a function of
the total plastic matrix and plastic fiber strains, but these quantities have been converted to
their tensor form, noted as E, eP , and ej. For the 3-D model, this free energy reads:
T = W(E, EP , EP)
M
1
= (E - EP): Cm : (E - EP ) + _(E - EP
C F : (E
- EP) +
1
(EP - EF)
MF
-EP
(5.2)
where CM, CF, and M are the fourth-order stiffness tensors of the matrix phase, the fibers, and
coupling between the two, respectively. Substitution of 5.2 into 5.1 yields the state equations:
(
[
m
CM
0
F
-CM
E
-CF
-(CM +
CF
UF
o-M and
CM+CF
M
-(CF
M
E
(5.3)
E
+ M)
are still the driving forces of the matrix cracking and fiber yielding, and therefore
satisfy the stress additivity condition:
(5.4)
E = JM + UF
Furthermore, as the stiffness matrices are now fourth-order tensors, 3 x 21 stiffness parameters
are involved in the constitutive relations. The tensors themselves are still related to the free
energy in the same manner as before (see Equations (2.24) through (2.26)):
CM =-
E
' CF=-
E
_&
96
FM
9E
(5.5)
(5.5)P
5.1.1
3-D Isotropy
Throughout the previous derivations, we have assumed that the material is linear elastic in
all directions, yet allowed for possible inhomogeneity. As a result, sixty-three elastic constants
must be defined. This number may be reduced by considering that fiber-reinforced materials,
such as UHPC, with randomly-oriented fibers may be approximated as isotropic. Furthermore,
one may assert that the individual matrix and fiber phases act isotropically as well. For this
case the stiffness matrices CM, CF, and M become functions of two unique scalar parameters:
Ci = 3KjK + 2GjJ;
K. _Ci
31-2")
i= M,F
(5.6)
Gi = 20
M = 3K 1 K + 2GJ;
KI
M3D
3
(5.7)
D2vi)
GI =2(1+vi)
where Kijkl
=
j6ij6kI
corresponds to the volumetric portion of the fourth-order unit tensor,
II, and J = E+ K contains the deviatoric terms; Gi is the shear modulus for either the matrix
or fiber phase; Ki is the corresponding bulk modulus; and vi is the Poisson's ratio.
The
subscripts, i = M, F,I, correspond to the matrix, fibers, and coupling, respectively. With
randomly-oriented fibers, there are six composite elastic properties that require definition: four
associated with the elasticity of the matrix and fibers (Gm,
GF,
VM, and vF), and two with
the matrix-fiber coupling (M 3 D and vi). As the latter two are activated only after cracking, the
post-cracking behavior of the model must be explored in order to obtain realistic expressions
for M 3 D
5.1.2
and vi
3-D Strength Domain
Two strength limits exist for UHPC: an initial limit prior to cracking, and another associated
with yield. Six macroscopic strength parameters are necessary to describe this triaxial strength
domain, shown in Figure 5-1. They are:
1. Initial tensile strength, E2. Initial compressive strength, E-
97
Initial Limit
Yield
xxX
Limit
0
TensionTension
0
CompressionCompression
U
2
..
......
I3
CompressionTension
Figure 5-1: UHPC strength domain in the ExX x Ey plane (
=
0) [3]
3. Initial biaxial compressive strength, E4. Tensile yield strength,
Et2
5. Compressive yield strength,
Ec2
6. Biaxial yield strength, Eb2
These stresses are comprised of two internal stresses, Oum and UF, such that the strength
domain of the material as a whole is the sum of the loading functions for the two individual
phases.
Matrix Strength Domain
We begin with the elasto-brittle-plastic behavior of the matrix, which is described by a higher
initial limit and a lower yield limit. This domain also has six defining parameters, which are:
1. Initial tensile strength, aMt = ft ± kM, which is the same as for the 1-D think model
2. Initial compressive strength, crmc
98
3. Initial biaxial compressive strength,
4. Tensile yield strength, orm
0
Mb
= kM, also the same as for the think model
5. Compressive yield strength, aMe
6. Biaxial yield strength, uc'
The loading functions of use here are a TC for tension-tension stress states, DP for tensioncompression, and another DP for compression-compression states, noted here by
and
f7/
fC,
fDP,
respectively. Prior to cracking, only the initial strengths are used, and so the loading
functions are expressed as:
I1,M- JMt < 0
fC,
f
P0
'DP
UN'1,M + SM
fBI'O -
0
BII,M +
(5.8)
I-cUN
ISMI
o
(5.9)
cBI,0 < 0
-
(5.10)
where:
I1,M =tr 0M
UN
am
BI
=
aM --
2
-
GMc
c
- UMt
UN,O
amt ; c±
(5.11)
=M
23 20Mb
- UMc
BI,0
'Mb -Mc
;CM
-
2
- -m
(
- -
(.2
UN
BI
(5.12)
Jam
After cracking, the post-cracking strength parameters take over.
(.3
(5.13)
For simplicity, we may
assume that all matrix strengths are reduced by the same factor, 'yc':
cr
ly CrMt
cr
Cr
JMc
-
UMt
-
UMc
cMb
UMb
(5.14)
Thus, six strength parameters become four, (aMt, UMc, UMb, andugt), while the friction
coefficient remains the same both before and after cracking. The post-cracking loading functions
are:
TC,cr
I1,M
99
Mt
0
(5.15)
Fiure.
5.
P411ri'
k
kii
o
M*
teTensionix
'~
idJ Lamit
C orpr
Tensen
&on-
ir
Comprssfon
strength domain in the
JMX
Figure 5-3: Biaxial fiber strength
domain in the 0 F,xx x uF,yy plane. [3]
M,y
Yx
plane. [3]
fDPcr
=UNI1M + SM
f4/ Cr
-
I1,M ± SM i-
--
(5.16)
CUN cr < 0
c'<
(5.17)
where:
UN,cr
CM
cr CUNO
BI,cr
CM~ CM
cr BI,O
(5.18)
'CM
This matrix strength domain is shown graphically in Figure 5-2. It should be noted that
after the initial strength limit, the stress in the matrix drops suddenly to its post-cracking plastic
limit. This drop in turn creates the macroscopic stress drop seen in the overall stress-strain
diagram.
Composite Fiber Strength Domain
Unlike the matrix, the elasto-plastic fibers require only three strength values:
1. The tensile strength, UFt, which is by definition equal to the fiber strength,
2. The compressive strength, UFc3. The biaxial compressive strength, UFbA plot of its strength domain is provided in Figure 5-3.
100
fy.
Note that the compressive strengths of the fiber phase do not equal the compressive strength
of the individual fibers, but rather represent the contribution of the fibers to the overall
composite strength.
For simplification, no single criterion is specifically reserved to limit
the biaxial compressive strength,
UFb.
[9]
Accordingly, only two strength domain criteria are
necessary: TC for tension-tension, and DP for compression-tension. These read:
f TC
JFt
1,F -
-
0
+ sFI - cDP < 0
f DP1,F
(5.19)
(5.20)
where:
1,F =
DP
VF3
rGF
(5.21)
UFc -
Ft
Fc + UFt
a DP
DP
(.2
(5.23)
Plastic Flow Rule
With the strength domains defined, the next step is to define the plastic behavior of the material.
Both the matrix and fiber phases are governed by the following Kuhn-Tucker conditions:
FM(uM)
0; dAM
FF(aF)
where FM = max
[fM]
and FF = max
0; FM(0M)dAM = 0
(5.24)
0; FF(0F)dAF =0
(5.25)
0; dAF
[ff]
are the loading functions for the matrix and fiber
phases, respectively, and dAM and dAF are the associated plastic multipliers representing the
intensity of plastic yielding. In the loading functions, the index, i, corresponds to the strength
criteria in Equations (5.8) through (5.10) for the matrix phase prior to cracking, Equations
(5.15) through (5.17) for the matrix post-cracking, and Equations (5.18) through (5.19) for
the fibers. A plastic flow rule is adopted such that plastic deformation occurs in the direction
normal to the loading functions (O2m and y).
101
Since only DP and TC criteria are used,
application of the flow rule results in:
afTCy.(01
aDP
=I-;
(-
(5.26)
ai + N,
where N. =,- is the normalized deviatoric stress tensor. The permanent deformations of the
ISI
composite material for the matrix and fiber phases now read:
dM=
dM,i OFm(om)
= dATC
afM
+ dAUN
NM + dABI[a1 + NSM]
dA TC1 + dA UN[aZN 1
dE=
dAFi
(5.27)
dABI
N
0
FF(JF
(5.28)
= dATCafTC ± dADP QFDP
F
F
aO'F
aBUF
=dAPlC
+ dA I[c1+
NsF]
where NsM and NsF are, respectively, the normalized deviatoric stress tensors for the matrix
and fiber phases.
As a consequence of the TC and DP strength limiting criteria, the 3-D UHPC model defines
the following dilatation behavior in plasticity:
tr (dEP) = tr
= tr
dA
dC+
)
0-
____
d
DP
Of DP
(.))
(5.29)
k
=
Z 3dA[C + E
3adAD
k
where
j and k are the memebers of the TC and DP loading functions employed for each
composite phase, respectively. Note that this dilatation behavior prohibits crack closure in the
matrix.
102
5.1.3
Consistency with the 1-D Model
As mentioned in Section 5.1.1, the properties of the matrix-fiber coupling, M 3D and VI, are not
directly related to the 1-D model parameters. We now consider the strength domains derived
in Section 5.1.2 in order to obtain coupling parameter values such that the uniaxial response of
the 3-D model matches that of the 1-D model. Uniaxial stress behavior for a strain-driven test
requires the following conditions:
" A loading strain is applied in only one direction (x-direction) and no shear strains are
produced:
Exx
0
(5.30)
EyY = Ezz 7 0
Ey =Eyz= E
=
0
" The corresponding stresses produced are:
E
=
Ezz = 0
E
=
Eyz
=
EzX
(5.31)
=0
" The 3-D loading function must be obeyed:
F = max[Fm, FF] < 0
(5.32)
Once loading functions are activated, plastic strains occur through the plastic multipliers, i.e.
dATC, dA N
BI
dATFC and dA D.
Stress-Strain Response of the 3-D Model
Under uniaxial loading, cracking occurs in all directions including perpendicular to the load
direction.
At this point, the fibers restrict the further opening of the cracks, providing a
ductility enhancement.
With the TC and DP loading functions defined, however, the 3-D
model represents these cracks as dilating plastic strains in the matrix, as shown in Equation
103
KOK
Total Uniaxial Stress
- Matrix Unlaxial Stress
r Fiber Uniaxial Stress
E
El F
Figure 5-4: Uniaxial stress-strain response for the macroscopic, matrix, and fiber stresses [9]
(5.28). As a result, the stresses evolve as shown in Figure 5-4. Whereas the 1-D model has only
one post-cracking stiffness, K 1 , the 3-D model has two hardening phases, represented by two
different stiffnesses, K 3D and K2A. This second range of slope K2
was called "kinking" by
Chuang [3]. In order to have consistency between the 1-D and 3-D formulations, we first must
analytically obtain the curve in Figure 5-4. There are thus four stress-strain points and three
stiffnesses that must be defined:
Exx,1, E_- j)
(Exx,2A,
Exx,2A)
; (Exx, 1,E
XX XX 1)(5.33)
; (Exx,2B, Exx,2)
K3D; K 3 D; K3D
(5.34)
Stress-Strain Points
The first critical point lies at the end of the initial elastic range, when Exx = aMt. Here, there
are two unknowns (Exx and Egy)
and two equations (Exx = amt and
104
EYY = 0). Thus, the
system may be solved by the use of linear algebra:
(5 .3 5 )
O- t
EE x
Eyy
0
where:
2(Km + KF)
(KM - KF)
\
(GM + GF)
\ -!(GM+GF) /
KKM +KF)
2(Gm
+GF)
2(KM +
/
(5.36)
KF)
(Gm+GF)
Solving Equation (5.35) yields the macroscopic stress and strain at the point:
Exz ,
1)
= (ExX, E)xx)|
7=OMt,
(5.37)
EY,=O
Immediately after first cracking occurs, there is a sudden stress drop, where the strain
remains at El yet the stress equals the post-cracking strength,
E+
This second point
may be denoted by:
Ex
z,)
1 = (Exxl=XX=
,=Mt,
Y=O, EZXXIxzx=at)
(5.38)
Kinking occurs between the macroscopic strain range Ex,1 < Ex :5 Exx,2A. At the third
point we have three unknowns (Exx, Eyy, and AUN) and three equations (Eyy = 0, fMN,
and
fFTC
0,
= 0). Similar to Equation (5.35), the system may be solved from:
Exr
Eyy
0
[j2]-
C UN,cr
OFt
4MJN
105
(5.39)
where:
(Km + KF)
2(Km+ KF)
-3aUNKm +
-(Gm
[J21
+GF)
K
9(aUN) 2 (Km + KF)
='
-3aUN Km +
2GM
3(GM +GF)
8GM
6aUNKm -
7Gm
2(Gm+GF)
3KF
6KF
9aUNKi
(5.40)
Furthermore, the corresponding macroscopic stress is of the form:
T
(KM + KF)+(GM+GF)
Exx =
II
Exx
2(KM + KF) - !(Gm +GF)
(5.41)
Eyv
-3a UN Km- fGM
AUN
leading to the third stress-strain point:
EExx,2Ax,2A
= (E
XX
EY=
fN,cr=O fC
(5.42)
g
At the fourth point, both the matrix and the fiber phases are at yield, with four unknowns
(Ex, Eyy, AUN, and ATC) and four equations to solve (Egy
=
0, fTC,
0
UN,
=
{J3
II
0, and
fFTC = 0). This system is represented as:
0
Exx
Eyc
UN
A^M
UN,cr
CM
JFt
XFC
106
(5.43)
where:
(Km + KF)
2(Km
+
KF)
-3aUNKM +
-2(Gm + GF)
3(GM+GF)
3KM
6KM
9aUN (KM+ K 1 )
[31
K
-9(aUN)
-3a UNKM -
8GM
6aUNKM -
lGM
8GM
2
-3KF
-9K
1
(KM + KF)
-9aUNK
-2(GM + GF)
3KF
9 aUNKI
6KF
9aUN (KF + K 1 )
(5.44)
The corresponding macroscopic stress at this point thus reads:
T
2(KM + KF) - !(Gm + GF)
-3aUNKM -
Eyy
=
= (Exx, Exx)
(5.45)
ATC
So, the last curve in the point is denoted by:
xx, 2 )
OcY1 + OFt
AUN
VJ8GM
-3KF
Exx,2B,
II
Exx
(KM + KF)+ (Gm +GF)
I
E YY --,M f TC cr = ,
f UN
=
FT C
(5.46)
= Exx
ExXIYxx=j c-F)t
EYY =0, f TC'C
fUN,cr =0
= 0,
TC
Model Stiffnesses
Now that the stress-strain points are obtained, we may solve for the three stiffnesses analytically.
This process begins with the initial stiffness, KO, which controls the elastic behavior of the
107
material in the range 0
< E., < Ex,,
K3DK
-
and may be represented as:
xx
O=
Exx
vu 0
(
T
(Km+KF)+ (Gm+GF)
(5.47)
1
T
____
2(KM + KF) - !(Gm +GF)
)x
where:
-(KM + KF)+!(Gm +GF)
2(KM + KF)+ !(Gm +GF)
OEyy
(5.48)
The first post-cracking stiffness before kinking, K3D, exists over the range Exx, < Exx <
Exx,2A, and reads:
K3D
K'
XX
= aEx
I yy=o0fMN=o
T
(Km + KF)+
(Gm+GF)
2(Km + KF) - !(Gm +GF)
JGm
-3aUNKM where
{ }
O9AUN
{I
1
.9AUN
-(KM - KF)+2(Gm+GF)
[M]
I{
-3aUNKM-
K
(5.49)
:GM
}
(5.50)
2(Km + KF)
-3aUNKM -
8GM
(Gm +GF)
6a t
Km -
-9(aUN) 2 (KM
VGMK
The second post-cracking stiffness, K3,
(5.51)
+ KF)
-2(Gm + GF)
occurs in the "kinked" range Exx,2A < Ex
108
<
Exx,2B,
and is expressed as:
xx
K2A
=3D
OENV
M O jT
TNC=O
-T
(Km+KF)+4(Gm+GF)
2(KM + KF)
!(Gm + GF)
-
II
1
(5.52)
Da\UN
Gm
-3aUNKm-
&9ATC
-- 3KF
where
{}
aExxa
-(Km + KF) ± 2(Gm + GF)
V9AUN
-3aUNKM
= [A421-1
-OATC
2(Km+KF)
GM
-3KF
-3aUNKM -
GM
I
(5.53)
-3KF
2c(Gm + GF)
[M21_
6aUNKM 6KF
K
-9(aUN) 2 (KM + KF)
=
2Gm
-
2 (Gm
-9aUNKI
(5.54)
+ GF)
9aU NK
-9(KF + K 1 )
For uniaxial loading, then, the stress-strain curve may be constructed analytically with the
stress-strain points and stiffnesses defined above.
The 3-D Coupling Modulus
We have come finally to the crux of our analysis, whereby we determine the expression for the
3-D coupling modulus, M 3D, and the coupling Poisson's ratio, nu1 . In order for the 3-D model
results to be consistent with the 1-D model results, the following conditions must be satisfied:
109
"
The four stress-strain points defined must exist on the stress-strain curve of the 1-D model:
E
EXX,2B,
"
E x ,1, E_~
=(
(E,1, E,
=) (E1, E+)
Zxx,2A
}
i
XX
Ei(5.55)(E,
E (E, E) of 1-D model
(5.56)
xx,2
Except for the kinking region, the stiffnesses of the 3-D model must coincide with those
of the 1-D model:
cK3D
=
K13D
K0
(5.57)
K1
(5.58)
As the quantities in Equations (5.55) and (5.57) relate to elastic properties, the 3-D and 1-D
models will naturally coincide. The same cannot be said of the plastic regions, and so the results
must be tuned so that the two models' results match. This is done by solving Equation (5.58)
for the coupling modulus. Substitution of (5.49) and (2.13) into (5.58) with the assumption
that vM =
'vF=
vi = v yields the following expression derived by Chuang [3]:
M 3D = OM +
(
1)
CMCF
CM +CF
(5.59)
where
13 = (a
,/23(5.60)
3(aUN)2(-)+(12v)
The resulting uniaxial stress-strain response for both the 1-D and 3-D models is shown in Figure
5-5.
Implementation of this 3-D model in a commercial finite element program, CESAR-LCPC,
allows for non-linear finite element analysis. For reference on sample values for the 1-D material
parameters, the reader may use Table 2.1.
110
kink
kinking region
U,
Co
3-D Model S Auton
--
1-D Model S olution
Strain
Figure 5-5: Plot of the 1-D and 3-D uniaxial stress-strain response. [9]
5.2
Differences Between 1-D and 3-D Behavior
Practical differences exist beyond those seen in the stress-strain curve. Although the 3-D model
has slightly less capacity in uniaxial behavior than the 1-D model (see Figure 5-5), there are
effects in other transverse directions (so-called 3-D effects) that are neglected by the 1-D model.
Ms. Park discovered as much when modeling a cross-section created by her optimization method
in three-dimensions. The purpose of this section, then, is to explore and explain these effects,
and use them to validate the safety of the proposed 1-D design guidelines.
5.2.1
Modeled Section Behavior
Extra dimensions add transverse effects and stiffnesses to the simulated behavior of UHPC
structures.
Thus, this cross-linking will cause the 3-D model to deflect less and fail at
higher loads than those predicted by the 1-D model.
Evidence of this arose in Ms. Park's
analysis [8] of her 1-D section designs in the finite element program CESAR. In plotting
the normalized maximum plastic strain (k" = e_/6g) against the normalized ULS
111
live load
Whenever scientific exploration yields a new theory or model, it must be validated against
actual conditions to be of any service to the engineer. Accordingly, the hardened UHPC
model has been validated in a few tests performed by the Federal Highway Administration
(FHWA). A prestressed AASHTO Type II highway girder made of DUCTAL,
a proprietary
UHPC, were tested at the Turner-Fairbank Highway Research Center Structures Laboratory
in McLean, Virginia in 2002. The strain and deflection results from these experiments were
then analyzed by Hesson Park, a 2003 Master of Science student at MIT, who compared them
against the values obtained via the application of the 3-D model in finite element analysis.
Suffice to say, the model has been validated for application in two and three-dimensional
analysis and used since then to guide the design of UHPC girders.
(FULS = YFL/FULS, 0 < -y
1), it was shown that at 100% of the expected loading, the plastic
strain was only 30% of its maximum value. She was able to reach 100% for both normalized
ULS live load and normalized plastic strain simultaneously only after reducing the height of
the web by approximately 10%.
The graphs of this analysis are shown in Figures 5-6 and 5-7.
5.2.2
Moment-Curvature Behavior
For this work, similar analysis has been performed in order to determine the difference between
the relationship of moment to beam curvature for the 1-D and 3-D cases. A box section of the
same type as that used in 1-D analysis was optimized according to the current MIT methods.
Its dimensions are: total height, H = 857 mm (33.74 in); web height, d" = 576 mm (22.67 in);
bottom flange height, dBF = 167 mm (6.57 in); top flange height, dTF
widths, bTF, bBF
=
=
115 mm (4.5 in); flange
3.67 m (12 ft); and total web width, b, = 229 mm (9 in). Prestressing was
included, with a total force of P = 5.755 MN (1293 kips). With the 1-D model, the analysis
proceded much in the same manner as that of the size effect for the AFGC and MIT methods.
For the 3-D analysis, only half of the girder was modeled in order to reduce the amount of time
required for the calculations. In order to determine the progression of bending moment as a
function of curvature, the plastic strains in the section for different time steps were obtained,
the total strain at each point calculated, and the curvature deduced from the variation in total
strain along the height of the cross-section. Because CESAR allows one to progressively step up
the transverse loading, moment was determined by recording the percentages of ULS loading
applied and the determining the associated moment induced on the section. Results of this
112
1.2
rn-I
-o
0
1
0.8
CO)
-J
N
0.6
L=21m, P=4.450 N, Hw-0.655m
--
0.4
P =4.45MN, H
-L=30m,
0.2
L=30m, P=6.68MN Hw-O.864m
-
-
-
-L=37m,P=6.68MN,H w=1.201m
0
z
0
.
0
I.
0.2
I
..
III.
0.4
=1.2 51m
0.6
0.8
1
1.4
1.2
Normalized Maximum Plastic Strain [1]
Figure 5-6: Results obtained from finite element results for normalized ULS live load versus
normalized maximum plastic strain of section obtained through 1-D optimization. [8]
1.2
- -
i
0
-J
a)
-J
0
-J
0.: i
.7
0.6 0.4
- - - L=21 m, P =4.45MN, H%-O.575m
-
-L=30m,
-c
-
0.2 -
0
P =4.45MN, Hl =1.1 m
L=30m, P=6.68MN, Hw=0.75m
-
-
-
-L =37m, P =6.68MN, H %=1.1 25m
I
I
I
I
0
0.2
0.4
0.6
I
I
0.8
I
I
1
1.
.I
1.2
1.4
Normalized Maximum Plastic Strain [1]
Figure 5-7: Results obtained from finite element results for normalized ULS live load versus
normalized maximum plastic strain after further optimization. [8]
113
0
12 ----
0.02
0.01
3
[11In] x 10-
0.03
±100
x
10+80
E
8+60
6-40
E
4 --
2/
+20
t.1
V0.00
-+0
0.01
0.02
0.03
0.04
0.05
0.06
0.07
0.08
Curvature [(11cm) x 10-]
Figure 5-8: Bending moment versus curvature for 1-D and 3-D sections of identical geometry.
analysis are shown in Figure 5-8. In line with Ms. Park's results, the 1-D moment-curvature
relationship is approximately 85% of that for 3-D. The fact that the 1-D and 3-D simulations
follow the same general trend of moment versus curvature indicates the agreement between the
two models in material behavior. Furthermore, we are confident that the 1-D model is always
conservative with respect to the validated 3-D model, which aids us in the validation of the
proposed design guidelines of Section 4.1.
5.3
Validation of Proposed Design Guidelines
By itself, the girder achieved a plastic strain of 0.00145 on the tension face, an order of
magnitude smaller than the calculated maximum plastic strain of 0.015.
A picture of the
deformed shape and distribution of strains may be seen in Figures 5-9 and 5-10. Indeed, this
is a much greater disparity than Ms. Park's analysis would suggest. However, the key is that
there is a nonlinear relationship between the changes in the section height and changes in the
normalized maximum plastic strain. Recall that in Figures 5-6 and 5-7 a height difference of
approximately 10% will cover a 70% difference in normalized plastic strain. In the analysis
performed, the total heights achieved by the current MIT optimization method differ from Ms.
114
to finite element simulation.
Figure 5-9: Deformed sha
Figure 5-10: Distribution of strains on the surface of the box section. Plastic tensile strain at
midspan = 0.00145
115
Park's numbers by between 3 and 7%, since the current method applied a safety factor to the
calculated section capacity. We may draw a few conclusions from this:
1. The nonlinear behavior encountered in ULS conditions inflates the effect of changing the
height of the section. Differences on the order of a decimeter (4 inches) can be what
separates a safe design from one that fails too early.
2. Because of 3-D effects, a structural element will have greater stiffness in 3-D than in the
1-D model.
Since the 3-D model has been proven to be an accurate representation of
real-world behavior, designs using the current MIT method may be considered safe. They
may be further slimmed in cost-critical or other situations where such optimization is
essential, which may be achieved by shortening the web height by a few centimeters or
inches.
3. With all the load and resistance factors, one will end up with a design that has
approximately 90% less plastic strain than the maximum allowable. Thus, designs created
with the current MIT recommendations will be able to handle an overall increase in loads
over its design life. This is beneficial considering that UHPC structures have at least
twice the expected life than normal-weight concrete.
The three-dimensional material model allows us to more accurately capture the 3-D mechanisms
of the composite material. As a result, we find that the designs produced by the proposed MIT
method are sufficiently conservative, and that further refinement in design may be achieved by
finite element simulations if it is needed.
5.4
Dynamic Analysis
CESAR also has an option that implements the UHPC material module into dynamic analysis
to produce results for the fundamental modes and frequencies of the analyzed structure. In this
simulation, the box section mentioned above was again analyzed, and the simulations reported
the mode shape and frequencies of the first five modes, although the first three are the only
ones considered important here.
Pictures of these modes and frequencies are available in
Figures 5-11 through 5-13. For the first mode shape, the bridge deflects as a half-sinusoid, with
116
Figure 5-12: Deflected shape of box section for second fundamental mode.
117
Figure 5-13: Deflected shape of box section for third fundamental mode.
Frequencies
Mode
[Hz]
Pitch vibration (forward-to-back)
Roll vibration (side-to-side)
Heave vibration (fishtailing)
Front wheel-hop vibration (right and left)
Rear wheel-hop vibration (right and left)
1.14-1.87
1.50-2.38
1.55-2.46
8.95-12.61
10.50-14.48
Table 5.1: Mode shapes and frequencies for a 16-ton truck. [5]
constant displacement at any transverse point for a given longitudinal point. The second may
be described as full sinusoid, again with constant vertical displacement for a given longitudinal
distance from an end. Opposing half-sinusoids describe the third mode, with zero displacement
along the girder centerline. Frequencies rise with each mode shape, beginning with 6.48 Hertz
for the first mode, 19.66 Hertz for the second, and 23.23 Hertz for the third. In sum, we have
two transverse modes and one torsional mode.
We consider the five lowest fundamental frequencies for a 16-ton (35 kip) truck, as reported
in Table 5.1. Immediately, we see that the second and third modes of the bridge are not in
118
danger of being excited. This leaves only the first fundamental frequency of the bridge, which
is squarely between the reported values for heave and front wheel-hop vibration. Wheel-hop,
either front or rear, is a condition where the wheel vibrates vertically enough to lose traction. It
may be caused by a variety of reasons, such as sudden acceleration, unbalanced tire pressures,
or poor road surface conditions; but nonetheless excites vehicle's suspension, which in turn
excites the road surface. Given that the first fundamental mode of the box section produces
vertical deflection, we concern ourselves only with loading in the same direction, which allows
us to neglect any concern for heave vibration.
We are left with the wheel-hop, whose frequency is still approximately 2.5 Hertz higher than
the bridge frequency. The only cause of wheel-hop under our direct control is the condition of
the road surface. Solutions include a regular resurfacing with asphalt, normal-weight concrete,
or any other decking material deemed appropriate; or ensuring that the UHPC deck is in good
condition. Indeed, because of the enhanced durability of UHPC material, no extra decking is
required, and any potholes or other irregularities would indicate more serious problems with
the integrity and maintenance of the UHPC material itself. Our conclusions, therefore, are
that the box girder section as designed is sufficient for both static loading (see Section 5.3) and
dynamic loading.
5.5
Chapter Summary
This chapter closes the design of hardened UHPC material by extending the analysis to threedimensions. Beginning with the Clausius-Duhem inequalty of Equation (5.1) in Section 5.1,
we were able to derive expressions for the stiffnesses of the 3-D model and the critical stresses
(Section 5.1.2) and ensure compatibility between the 1-D model and the 3-D model's uniaxial
response (Section 5.1.3). Thus, by the end we had a full description of 3-D UHPC behavior.
As this model has already been validated [8], we explored the practical differences between
the 1-D and 3-D models in Section 5.2.
Transverse effects not captured in the 1-D model
produce higher stiffnesses in finite element modeling, which explains the results in Ms. Park's
analysis of an optimized section modeled in three dimensions. This difference between the two
models was again demonstrated in the comparison of moment-curvature relations. Because the
119
one-dimensional UHPC model is necessarily more conservative than the 3-D model, we were
able, in Section 5.3, to validate the design method of Section 4.1.
Finally, a dynamic analysis was performed in Section 5.4 of a box girder optimized through
the 1-D method. Its mode shapes and frequencies were presented, and it was shown that the
design is indeed safe for dynamic effects and requires no further modification.
120
Chapter 6
Conclusions
6.1
Summary of Thesis
In this thesis, the reader has been introduced to ultra-high performance concrete, one of the
newest classes of materials to reach the market.
Its increased stiffness, strength, ductility,
and durability make it an attractive choice of material in structural design, and its ability
to be cast into any shape and an almost infinite range of thicknesses make it well-suited to
today's architectural needs. We began with a one-dimensional think-model in Section 2.1, and
analyzed it to understand the essential phenomena at the microscopic scale. Previous design
recommendations were then reviewed in Sections 3.1 through 3.3, culminating with the current
set of MIT design guidelines of Section 4.1, which utilize maximum crack width criteria to
limit plastic deformations in the material. Comparisons against previous recommendations in
Sections 4.2.1 and 4.2.2 proved that the MIT guidelines produce the most structurally efficient
designs possible for given material behavior and section shape. A size effect was disccussed in
Section 4.2.3, with the practical implications that thinner sections engage the fibers better and
thus can carry higher stresses in the extreme ends of the cross-section. Sensitivity analysis in
Section 4.2.4 demonstrated that the web height and number of prestressing tendons have the
greatest effect on the structural efficiency of the cross-section. Then, the proposed guidelines
were applied in Section 4.2 to compare the efficiencies of three cross-section shapes: a box
section, a double-tee section, and a standard girder.
We found that the box section has
somewhat of an advantage over the double-tee, and that both are significantly better than
121
the standard girder.
In Section 5.1 the three-dimensional model was introduced and analyzed, which is necessary
for finite-element simulations. This model has been previously validated [8], and so the results
produced from its implementation in the finite element program CESAR may be trusted.
Practical differences between the 1-D and 3-D model were then explored in Sections 5.2.1 and
5.2.2. Because the 1-D model neglects transverse effects, its results are conservative relative
to those of the 3-D model. This aspect was exploited in Section 5.3 to validate the proposed
guidelines of Section 4.1.
Finally, the exploration of the 3-D model ended with a dynamic
analysis in Section 5.4 of a box section optimized by the 1-D guidelines. It was shown that, for
reported fundamental frequencies of a 16 ton (35 kip) truck, the proposed section is sufficient
to withstand expected dynamic excitations.
In addition to gearing the presentation towards an engineering-savvy audience, original
work has been done to provide comparisons and demonstrate the model's application. The
advantages of the proposed guidelines over the AFGC recommendations and previous MIT
recommendations had not previously been known, and a comparison against former MIT
methods are necessary to justify such design work. The investigations for a size effect and
the relative efficiencies of different section designs are also new developments. For the threedimensional model, no explicit attention had previously been paid to the practical consequences
of the differences between the 1-D and 3-D models.
This was covered by a comparison of
moment-curvature profiles for both 1-D and 3-D design, as well as an explanation for the
disparity between the expected and actual results of finite element analysis. Finally, dynamic
analysis had been explored before, but not presented in a thesis as a component to design.
Though the analytical description of the material is complex, the crucial aspects of UHPC
design have been explained in a manner useful to the engineer. He or she should be able to
apply them in practice and extend them to other structures based on his or her experience,
knowledge, and structural background.
It is therefore hoped that this work will aid in the
adoption and acceptance of UHPC as an advantageous structural material.
122
6.2
Suggestions for Future Research
There are more research opportunities available that either come from or are related to the
topics discussed in this thesis:
" The methods presented in this thesis deal with bending and shear, which are of the
utmost importance in most structural design scenarios. However, it is possible that a
different set of methods are necessary for columns or other types of structural systems.
Furthermore, effects such as torsion and impact loading have not been examined with the
analytical UHPC model, and so the AFGC recommendations [4] are the only suggestions
that currently exist. This merits exploration and the possible modification of the current
guidelines.
" Shells are a popular structural form for concrete, and are a study in engineering efficiency
and mathematical expression.
With ultra-high performance concrete, it is possible to
design shells with far smaller thicknesses than before and without steel reinforcement.
One could discuss the advances in shell design and the challenges posed by using UHPC
instead of standard concrete.
" UHPC has been shown to be very sensitive to temperature during the casting process, to
the point that cracking has been observed upon demolding. While a theoretical framework
exists, the model has not been validated against real-world data. This merits investigation
and analysis towards a clear design procedure for the casting process.
* It has been suggested that the security concept of applying factors to section capacity is
unsafe, and that the factors used are possibly insufficient. Research and testing must be
conducted to test for the safety of the factors, and if they are deemed insufficient then a
new method of ensuring safety must be proposed and analyzed.
123
Bibliography
[1] M. Behloul.
Calculation in Bending with DUCTAL.
Technical report, LaFarge
Corporation, July 2006.
[2] C. S. Cai. Discussion on AASHTO LRFD Load Distribution Factors for Slab-on-Girder
Bridges. ASCE Practice Periodical on Structural Design and Construction, 2005.
[3] E. Chuang. Ductility Enhancement of High Performance Cementitious Composites and
Structures. PhD thesis, Massachusetts Institute of Technology, Cambridge, MA, 2002.
[4] Association Frangaise de Genie Civil.
Betons fibrees
a ultra-hautes performances -
Recommendations provisoires (Ultra High Performance Fibre Reinforced Concretes Interim Recommendations). Technical report, AFGC, 2002.
[5] C. Broquet et al.
Dynamic Behavior of Deck Slabs of Concrete Road Bridges.
ASCE Journal of Bridge Engineering, 2004.
[6] S.-T. Song et al.
Live-Load Distribution Factors for Concrete Box-Girder Bridges.
ASCE Journal of Bridge Engineering, 2003.
[7] Y.
Tanaka
et
al.
Design
and
Construction
of
Sakata-Mirai
Footbridge.
Model-Based Optimization of UHPC Highway Bridge Girders.
PhD thesis,
Proceedings of the First fib Congress, 2002.
[8] H. Park.
Massachusetts Institute of Technology, Cambridge, MA, 2003.
[9] J. Shim.
Prediction of Early-Age Cracking of UHPC Materials and Structures:
A
Thermo-Chemo-Mechanics Approach. PhD thesis, Massachusetts Institute of Technology,
Cambridge, MA, 2004.
124
[10] F.-J. Ulm.
UHPC Design for Rte. 624 Over Cat Point Creek.
Massachusetts Institute of Technology (for Virginia DOT), June 2005.
125
Technical report,