Stability Analysis of Natural Circulation in BWRs at High
Pressure Conditions
by
Rui Hu
B.S., Nuclear Engineering (2002)
M.S., Nuclear Engineering (2005)
Shanghai Jiao Tong University, P.R. China
Submitted to the Department of Nuclear Science and Engineering
in Partial Fulfillment of the Requirements for the Degree of
Master of Science in Nuclear Science and Engineering
at the
Massachusetts Institute of Technology
September 2007
© 2007 Massachusetts Institute of Technology
All rights reserved
Signature of Author ...................
Department of Nucliar Science and Engineering
August 10, 2007
Certified by .............
TEPC
Mujid S. Kazimi
TEPCO Pr'ffsýsor of Nuclear Engineering
Professor of Mechanical Engineering
SThesis
Supervisor
C ertified by ......................... ...................
..............
Jacopo Buongiorno
Assistant Pressor of Nu lear Science and Engineering
Thesis Reader
Accepted by ............................
/
Jeffrey A. Coderre
Professor of Nuclear Science and Engineering
Chairman, Department Committee on Graduate Students
MASSACHU•.IrS INS
OFTECHNOLOGY
JUL 2 4 2008
LIBRARIES
M
Stability Analysis of Natural Circulation in BWRs
at High Pressure Conditions
by
Rui Hu
Submitted to the Department of Nuclear Science and Engineering
in Partial Fulfillment of the Requirements for the Degree of Master of Science
at Massachusetts Institute of Technology
Abstract
At rated conditions, a natural circulation boiling water reactor (NCBWR) depends completely on
buoyancy to remove heat from the reactor core. This raises the issue of potential unstable flow.
oscillations. The objective of this work is to assess the characteristics of stability in a NCBWR at
rated conditions, and the sensitivity to design and operating conditions in comparison to previous
BWRs.
Two kinds of instabilities, namely Ledinegg flow excursion and Density Wave Oscillations
(DWO), have been studied. The DWO analyses were conducted for three oscillation modes:
Single Channel thermal-hydraulic stability, coupled neutronics region-wide out-of-phase stability
and core-wide in-phase stability. Using frequency domain methods, the three types of DWO
stability characteristics of the NCBWR and their sensitivity to the operating parameters and
design features have been determined. The characteristic equations are constructed from
linearized equations, which are derived for small deviations around steady operating conditions.
The Economic Simplified Boiling Water Reactor (ESBWR) is used in our analysis as a reference
NCBWR design. It is found that the ESBWR can be stable with a large margin around the
operating conditions by proper choice of the core inlet orifice scheme, and for appropriate power
to flow ratios.
In single channel stability analysis, neutronic feedback is neglected. Design features of the
ESBWR, including shorter fuel bundle and use of part-length rods in the assemblies, tend to
improve the thermal-hydraulic stability performance. However, the thermal-hydraulic stability
margin is still lower than that of a typical BWR at rated conditions. In neutronic-coupled out-ofphase as well as in-phase stability analysis, the perturbation decay ratios for ESBWR at our
assumed conditions are higher than that of a typical BWR (Peach Bottom 2) at rated conditions,
due to its lower thermal-hydraulic stability margin and higher neutronic feedback. Nevertheless,
the stability criteria are satisfied.
-I-
To evaluate the NCBWR stability performance, comparison with BWR/Peach Bottom 2 at both
the rated condition and maximum natural circulation condition has been conducted. Sensitivity
studies are performed on the effects of design features and operating parameters, including
chimney length, inlet orifice coefficient, power, flow rate, and axial power distribution, reactivity
coefficients, fuel pellet-clad gap conductance. It can be concluded that the NCBWR and BWR
stabilities are similarly sensitive to operating parameters.
Thesis Advisor: Professor Mujid S. Kazimi
Title: TEPCO Professor of Nuclear Engineering; Professor of Mechanical Engineering
Thesis Reader: Professor Jacopo Buongiorno
Title: Assistant Professor of Nuclear Science and Engineering
- II -
Acknowledgements
I would like to express my sincere gratitude to the thesis advisor, Professor Mujid S. Kazimi, for
continuous support and constructive advices. Special thanks are extended to Dr. Jiyun Zhao, who
did a lot of preliminary work on this topic, for his help and fruitful discussions in the early days
of this work. I'd like to also thank Dr. Shih-Ping Kao for valuable suggestions, guidance,
comments, and reviewing my thesis. I sincerely thank Professor Jacopo Buongiorno for the
valuable comments and to be the thesis reader.
I sincerely thank all my colleagues in Department of Nuclear Science & Engineering at MIT for
the unlimited support and the friendly working atmosphere.
-III -
Table of Contents
A bstract ................................................
........... ..... ................. I
Acknow ledgem ents .................................
........................ ................ III
Table of Contents ...........................................................
IV
N om enclature ................................................................. .................. V I
C hapter 1
Introduction .............................. ..... ......... ........................................... 1
1.1 Historical Perspective of Boiling Water Reactor Stability .......................
1
1.2 M otivation and Objective ........................
... .............................
1.3 Literature Review of BWR Stability Analysis .........................
........................
..
.................
3
5
1.3.1 Review of Channel Two-phase Flow Stability Research .....................................
5
1.3.2 Review of Region-Wide and Core-Wide BWR Stability Research ............................ 6
1.3.3 Review of Codes Capable of Simulating the BWR System Stability ......................... 8
1.4 Thesis W ork and O rganization ................................................................... ...................... 10
Chapter 2 Description of a Reference Natural Circulation BWR (ESBWR) Design ............... 12
2.1 Overview of Design Features .......................................
...................... 12
2.2 Coolant flow path and conditions in ESBW R .........................................
.......................... 14
2.3 ESBWR core and fuel assembly description ..................................................................... 17
Chapter 3 Method Description of Linear Stability Analysis of BWR...................................
3.1 Stability of a dynam ic system....................................
...........................
3.2 General BWR instabilities and physical processes..........................
3.3 Mechanism of Density Wave Oscillations .......................
3.4 Fundamental Equations ........................................
..
.....................
18
18
19
...................... 21
........................ 23
3.4.1. Governing equations of the two-phase flow field .........................
3.4.2 Fuel assembly heat conduction equations .....................
.............
3.4.3 N eutronic equations ......................................................
.......................................
3.5 Frequency Domain Linear Analysis Method.....................................................
23
25
27
28
Chapter 4 Single Channel Thermal-Hydraulic Stability Analysis of BWRs....................... 30
4.1 Stability C haracteristics .............................................................................. ................ 30
4.2 Construction of the Characteristic Equation......................................... 32
4.2.1 Channel Nodes M odel ........................................
...................... 33
4.2.2 Friction Factors and Pressure Drop ......................
..
...................... 34
4.2.3 System Steady State Calculation ................................................... ......... 34
4.2.4 Derivation of Characteristic equation.................................
37
4.3 Density Wave Stability performances of ESBWR and a normal BWR ........................... 42
4.3.1 Stability performance under design conditions with uniform axial power distribution
(H EM ) ........................ ....
. ...................... ..............................................
. . .....
4.3.2 Parameter sensitivity analysis................................
.......................
4.3.3 Design feature sensitivity analysis (non-uniform power distribution, HEM) ..............
4.3.4 Model evaluation, HEM versus NHEM ........
................................
4.4 Ledinegg Stability Analysis ...............................................
IV-
43
44
49
50
53
4.4.1 Ledinegg Stability Analysis by Using Pressure Drop versus Flow Rate Curve ........ 54
4.4.2 Ledinegg Stability Analysis by Using Characteristic Equation ................................ 55
4.5 Conclusion.........................................
56
Chapter 5 Coupled neutronic region-wide (out-of-phase) stability analysis .......................... 57
5.1 The model description ..................................................
58
5.1.1 Thermal-hydraulic model description ..........................................
............ 59
5.1.2 Neutronic model description ...................................................................... 62
5.1.3 Coupling of the thermal-hydraulic and neutronic models .................................... 65
5.1.4 Characteristic equation for coupled neutronics out-of-phase stability ...................... 68
5.2 Out-of-phase Stability performance of ESBWR and comparisons with BWR ................ 69
5.2.1 Thermal-Hydraulic Lumping and Reactivity Coefficients .....................................
5.2.2 Stability performance under design conditions .......................................
.......
5.2.3 Param eter sensitivity analysis.......................................................................................
5.3 Conclusion.........................................
71
73
75
81
Chapter 6 Coupled neutronic core wide (in-phase) stability analysis .................................... 83
6.1 The m odel description ................................................. .................................................. 83
6.1.1 Thermal-hydraulics model description ..................................... .....
............
6.1.2 Neutronic model descriptions ....................................................................................
6.1.3 Characteristic equation for in-phase stability analysis .......................................
6.2 In-phase Stability performance of ESBWR and comparisons with BWR........................
85
95
96
97
6.2.1 Stability performance under design conditions .......................................
....... 98
6.2.2 Param eter sensitivity analysis.......................................................................................
99
6.3 Conclusion..........................................
106
Chapter 7 Summary and Recommendations .....................................
7.1 Summ ary of C onclusions ..................................................................................................
7.2 Recommendations for Future work ......................................................
107
107
.......................... 111
References ...................................................................................................................................
112
Nomenclature
English
A,: Fuel assembly cross sectional flow area (m2)
Cden: Density reactivity coefficient
Cdop: Doppler reactivity coefficient
Ck : Kinematics wave velocity (m/s), Ck = j
V
C O: Void distribution parameter
c,: Specific heat at constant pressure [kJ/(kg K)]
D,: Hydraulic Diameter (m)
f,: Friction factor in single-phase
liquid region
f 2 : Friction factor in two-phase mixture region
G: Mass flux (kg/m2s)
h: Enthalpy (kJ/kg)
j: Volumetric flux density (m/s)
Ki: Inlet orifice coefficient
kf : Liquid thermal conductivity [W/(m K)]
L: Length of fuel rod heated region (m)
Lnod : Length of fuel rod lower unheated plenum (m)
LoU: Length of fuel rod upper gas plenum (m)
M : M ratio of the recirculation loop, M =
Wsutiuon
Wrecirculation
N,~: Subcooling Number
Npch : Phase Change Number
Nu: Nusselt number
-VI-
AP : Pressure drop (MPa)
APsystem:
Channel pressure drop (MPa)
APexter,,a:
External pressure drop imposed on the channel (MPa)
P: Pressure (MPa)
P,: Peclet number Pe = GDec
ef
kf
Ph : Fuel rod outside perimeter per fuel assembly (m)
Ph: Heating parameter of the fuel rods per assembly (m)
Pr: Prandtl number
q": Surface heat flux (kW/m2)
3
q,': Volumetric heat flux (kW/m )
qf,i: Fuel rods surface heat flux at node i (kW/m 2)
r: Radius of the fuel pin (m)
R: Ideal gas constant [J/(mol K)]
R,: Fuel pellet radius (m)
R2 : Fuel cladding inside radius (m)
R3 :Fuel cladding outside radius (m)
Re: Reynold number
s : Variable of Laplace Transformation
To: Fuel centerline temperature (K)
Tf : Fuel temperature (K)
T,: Fuel cladding temperature (K)
Tp,,: Average temperature of the fuel pin (K)
T, : Wall temperature (K)
To: Bulk fluid temperature (K)
t: Time (s)
u : Coolant velocity (m/s)
v: Specific volume (m3/kg)
- VII -
Vg: Vapor drift velocity (m/s)
w: Flow rate (kg/s)
x(t) : Vector of state variables
x: Flow quality
xeq : Equilibrium quality
Xeq,exit:
Equilibrium quality at channel exit
y(t): Vector of constitutive variables.
Greek letters
p: Coolant density (kg/m 3)
Ap : Density difference between liquid and vapor at saturation (kg/m3)
6: Perturbation
4: Fuel pin non-dimensional radius,
r
= r
R,
r-R
r7: Fuel cladding non-dimensional radius, r7 =
2
R 3 - R2
a : Real part of eigenvalue
w": Imaginary part of eigenvalue
i : Eigenvalues
A : Length of heated single-phase liquid region (m)
S: Two phase mixture phase change frequency
VAB
q Ph , (rad/s)
hAB Ac
a : Vapor void fraction
Fg: Actual vapor generation rate (kg/m3 s)
F: Velocity to pressure transfer function
/T1 : Heat generation rate to pressure transfer function
lI: Transfer function of the inlet flow oscillation to the total pressure drop oscillation across the
channel
E : An arbitrarily constant number
- VIII -
Ai •:Decay constant of ith-group precursors,
fi: Fraction of neutrons in it delayed group,
Xdi (E):
ith-group delayed neutron spectra, and
p (E): Prompt neutron spectra.
Am : mth mode reactivity
m: mth neutron flux mode
If : Fission cross section
v : Number of neutrons per fission
Am : Neutron
generation time of the mth mode
Subscripts
in: Channel inlet
exit: Channel outlet
f :Saturated Liquid
g : Saturated vapor
fg : Difference between values of vapor and liquid at saturation
ext: External
m : Two phase mixture
A : Properties at net vapor generation point
i: Axial node number
1: Heated single-phase liquid region
2: Heated two-phase mixture region
t: Total
F :Feedback
ori : Orifice
c: Coolant
nod : Lower non-heating fuel part
nou : Upper non-heating fuel part
Superscripts
o : Steady state value
-IX-
s : Subcritical reactivity
Acronyms
BWR: Boiling Water Reactor
NCBWR: Natural Circulation Boiling Water Reactor
ESBWR: Economical Simplified Boiling Water Reactor
ABWR: Advanced Boiling Water Reactor
SCWR: Supercritical water-cooled reactor
NPP: Nuclear Power Plant
DWO: Density wave oscillations
DR: Decay ratio
HEM: Homogenous-Equilibrium model
HNEM: Homogenous-Nonequilibrium model
GE: General Electric
IAEA: International Atomic Energy Agency
NRC: Nuclear Regulatory Commission
INEL: The Idaho National Laboratory
EPRI: Electric Power Research Institute
ORNL: Oak Ridge National Laboratory
SAB: code for Stability Analysis of BWR
DC: Downcomer
UP: Upper plenum
LP: Lower plenum
rs: Riser
sep: Steam separator
FW: Feed water
Chapter 1
Introduction
1.1 HistoricalPerspective of Boiling Water Reactor Stability
Nuclear energy plays a major role in meeting the world's energy needs. At the end of 2006, there
were 444 nuclear power plants operating in 32 countries, with 25 more units under construction.
These plants account for 17% of the world's electricity. Altogether there are 93 BWRs, including
four ABWRs, currently operating worldwide. Many are among the best operating plants in the
world, performing in the "best of class" category. Numerous countries rely heavily on BWR
plants to meeting their needs for electricity. Japan, for example, has 32 BWR plants, representing
nearly two-thirds of its installed nuclear capacity. Similarly, BWR plants predominate in Taiwan
and several European countries. In the United States, there are 35 operating BWRs.
During the development of BWR technology, there was considerable concern about the possible
effect of thermal hydraulic oscillations and coupled neutronic/thermal-hydraulic instabilities. The
boiling two-phase flow in the core may become less stable because of the time lag between vapor
generation and pressure loss perturbation. Furthermore, in BWRs, the reactivity depends strongly
on the core void fraction. Thus, when a void fraction oscillation is established in a BWR, the
power oscillates according to the neutronic feedback. This feedback mechanism may under
certain conditions lead to poorly damped or even limit-cycle power oscillations.
The stability of BWR reactor systems has been of a great concern from the safety and the design
point of view. In terms of safety, the concerned variables in an instability occurrence with high
oscillation amplitudes are the neutron flux and the rod surface temperature: the control of the first
one may prevent any undesired excursion of the second one. Additional problems might arise due
to thermal cycling that may affect the fuel rod integrity, making pellet-cladding interaction more
probable; thermal cycling may also induce greater than normal fission product release from
pellets [D'Auria, 1997]. Furthermore, sustained flow oscillations may cause forced mechanical
-1-
vibration of components or system control problems, affect the local heat transfer characteristics,
and may induce boiling crisis. Therefore, the designer must be able to predict the threshold of
instability in order to design a reactor with substantial stability margin.
Although events related to unstable behavior occurred every now and then, stability was not a
major issue for many years. Stability problems may only arise during start up or during transients
which significantly shift the operating point towards low core flow and high power. The
operating instructions for BWRs contain clear rules on how to avoid operating points (regions)
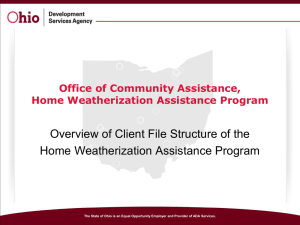
that may produce power-void oscillations. Fig. 1.1 shows a power-flow map for the Leibstadt
NPP [Hanggi, 2001]. The lower right side of the plot marks the allowed operating region, the
gray regime may only be entered if special measures are taken and finally, the black regime is
forbidden due to stability concerns.
100
90
0so
70
Thermal
" Power
5 (%)
40
30
20
10
10
20
30
40
50
60
70
80
90
100
Core Flow (%)
Fig. 1.1 Instability region in the power-flow map for the Leibstadt BWR NPP
The current trend of increasing reactor power and applying natural circulation core cooling,
however, has major consequences for the stability of new BWR designs. The numerous
modifications in reactor size, reactor power, fuel design, power density, discharge burnup and
loading strategies changed the core stability behavior of the BWR reactor to a significant extent.
-2-
In comparison to the situation in the Seventies, the region of the power-flow map which has to be
avoided grew to a respectable size. Instability events had been observed more frequently in
commercial plants. Table 1.1 summarizes instability cases that occurred in the last 20 years
[IAEA-TECDOC-1474, 2005]. Some of the instability events in BWR plants were inadvertent
and others were induced intentionally as experiments.
Since the design changes will persist due to economic reasons, the instability potential needs to be
addressed. Therefore, it is important to understand the underlying mechanism of power-void
instability as thoroughly as possible. The instability events in Table 1.1 and the open questions
led to numerous new investigations and reports and fostered the development of more
sophisticated computational tools.
1.2 Motivation and Objective
Natural circulation at full power is a key feature in the design of next generation BWRs, because
it has the potential for simplicity, inherent safety, and maintenance reduction. Numerous design
modifications can be applied in a natural circulation boiling water reactor (NCBWR) to achieve
simplicity and improved plant economics. Given that a NCBWR depends completely on natural
convection to remove heat from the reactor core at rated conditions, the stability of the flow
against density wave oscillations is important to ascertain under all expected operating conditions.
For economics, the modifications have allowed NCBWRs to work at high nominal power, but
they have also favored an increase in the reactivity feedback and a decrease in the response time,
resulting in a lower stability margin when the reactor is operated at low mass flow and high
nominal power. Also, a NCBWR typically uses large-size cores to compensate for shorter fuel
and produce higher power outputs. As the core size increases, the nuclear coupling between
different parts of the core becomes weaker, and the core becomes more susceptible to regional or
so-called out-of-phase oscillations. In addition, high chimneys can be installed in a NCBWR to
achieve natural circulation at full power, which raises the issue of flashing-induced instabilities
under low-pressure startup conditions.
The objective of this thesis is to determine the margin for stability of operation in BWRs relying
completely on natural convection for heat removal, such as the ESBWR, in comparison to the
conditions in older BWR technology that allows natural convection at part-load only. This thesis
focuses on investigation of stability against density wave oscillation. It explores the sensitivity of
stability to variations in design and operating conditions. Since the flashing-induced instabilities
are only important under low-pressure startup conditions, they are not included in this thesis.
Table 1. 1: Summary of reported BWR instability events
NPP, Country,
Event
Manufacturer
Date
30.06.1982
13.01.1984
23.02.1987
09.03.1988
15.01.1989
26.10.1989
08.01.1990
Caorso, Italy, GE (General
Electric)
Caorso, Italy, GE
TVO-I, Finland, ABB
Atom
LaSalle 2, USA, GE
Forsmark 1, Sweden, ABB
Atom
Ringhals 1, Sweden, ABB
Atom
ABB Atom
2, Sweden,
Core instability during plant start up
Core instability during special tests
Power oscillations during plant start up
Core instability with scram caused by neutron
flux oscillation
Power oscillations during special tests
Instability during power ascent after refueling
Power oscillations
29.01.1991
Cofrentes, Spain, GE
Power oscillations due to inadvertent entry in the
reactor power-core flow map instability zone "B"
03.07.1991
15.08.1992
09.07.1993
Isar 1, Germany, Siemens
WNP 2, USA, GE
Perry, USA, GE
Scram due to power oscillations
Power oscillations
Entry into a region of core instability
01.1995
Laguna Verde 1, Mexico,
GE
17.07.1996
Forsmark 1, Sweden, ABB
Atom
08.02.1998
ABB Atom
ABB Atom
25.02.1999
Oskarshamn 3, Sweden,
Power oscillations during start-up
Local oscillations due to a bad seated fuel
assembly
Power oscillations due to a bad combination of
core design and control-rod pattern during start
Oskarshamn 2, Sweden,
up
Power oscillations after a turbine trip with pump
ABB Atom
runback
-4-
1.3 Literature Review of BWR StabilityAnalysis
1.3.1 Review of Channel Two-phase Flow Stability Research
In general, several types of thermal-hydraulic instabilities may occur in a heated two-phase
system. Some of these instabilities arise from the steady-state characteristics of the system such
as flow excursion (or Leidinegg instability) and relaxation instability (flow pattern transition,
bumping, geysering, and chugging, etc.). Others are due to the dynamic nature of the system,
such as density wave oscillations, pressure drop oscillations, acoustic oscillations, and thermal
oscillations. Reviews of most aspects of two-phase stability may be found in [Boure, 1973] and
[Tong, 1997]. In the following, a brief literature review of the main papers with relevance to our
work is conducted.
For a single heated two-phase flow channel, Ishii [1971] constructed a stability boundary map to
provide the stability margin for a specific operating condition. Once the stability boundary is
provided, it is very easy for the designers to check the stability feature of their designs based on
the guidance of the stability maps. A thermal equilibrium two-phase model was applied by Ishii.
A drift flux model was applied to take into account the non-homogeneity of the two-phase flow.
It was found that the system pressure effects can be accounted for by the stability boundary,
which means that the stability boundary is the same for different system pressures. Therefore,
once a stability boundary map was constructed for a specific system pressure, it could be applied
to other pressures also.
Saha [1974] improved Ishii's model by using a simplified non-equilibrium two-phase flow model.
By comparing the model with an experiment conducted by using a Freon-113 boiling loop, he
found that the model matched the experimental data well.
Wang [1994] constructed a stability boundary map for a two-phase natural circulation loop. A
homogenous equilibrium two-phase flow model was used. He found that in addition to the
density wave instability at high power level, instability can occur at low power level as well.
Podowski [2003] studied the effects of different two-phase flow models on stability boundary
maps. The two-fluid model, drift flux model and HEM model were compared. It was found that
the HEM model predicts the most conservative stability boundary.
-5-
1.3.2 Review of Region-Wide and Core-Wide BWR Stability Research
The broad literature on BWR-stability covers a wide range of subjects. Reviews of most aspects
of neutronic coupled stability may be found in [D'Auria et al., 1997], [March-Leuba and Rey,
1993], [Hanggi, 2001], and [Lahey and Moody, 1993]. Papers chosen in our work are briefly
reviewed in the following.
According to [Lahey and Moody, 1993], the instability types that are of interest in the BWR
technology can be also categorized into static and dynamic instabilities. From the reactor
designer's viewpoint, the most important instability types are the Ledinegg instability and the
density wave oscillations (DWO).
Podowski [2003] categorized the DWO instability types for BWR into three types of DWOs. The
first one is a single channel type, which means that only one channel or a small fraction of the
parallel channels oscillates, while the other channels remain at steady state. This imposes a
constant pressure drop boundary condition across the oscillating channel or channels. This type of
DWO was also called the parallel channel type DWO by Podowski [2003]. During single channel
oscillation, only a small fraction of the core flow oscillates while the bulk flow remains at steady
state. Therefore, the neutronic feedback due to this small fraction oscillation can be neglected. In
other words, the thermal-hydraulic dynamics is decoupled from the neutronic dynamics in the
single channel oscillation. The second type is the region wide (or out-of-phase) instability. In this
type of instability, about half of the core behaves out-of-phase from the other half [March-Leuba
and Rey, 1993]. During the oscillation, half of the core rise in power while the other half decrease
to maintain an approximately constant total core power. Also, the system adjusts flow from one
half of the core to the other half while keeping the total flow rate almost constant. All channels
will have the same but oscillating pressure drop [Munoz-Cobo, et al, 2002]. The third type is
called the core wide in-phase instability, where the flow and power in all channels oscillate in
phase throughout the whole core.
March-Leuba and Rey [1993] provided a review of the state-of-the-art for the coupled neutronic
instabilities in BWRs. The topics discussed in this paper are: the observed instability modes in
BWRs, physical mechanisms leading to instabilities in BWRs, sensitivity to physical parameters
and codes used for BWR stability calculations.
-6-
March-Leuba and Blakeman [1991] discussed the mechanism of the out-of-phase oscillations in
BWRs. To demonstrate the out-of-phase oscillation, they coupled the first subcritical neutronic
dynamics model with a thermal-hydraulics model, and found that the out-of-phase instability can
occur even if the core-wide in-phase oscillation is stable. They indicated that for any operating
condition, there is a threshold reactivity value above which the out-of-phase mode is more
unstable that the in-phase mode. Then, they modified the frequency domain stability analysis
code LAPUR to include the out-of-phase analysis capability.
Hashimoto [1993] conducted an out-of-phase stability analysis of BWRs and concluded that the
absolute value of the reactivity coefficient should not be made too large in reactor design and the
subcriticality should be kept as large as possible in fuel management and reactor operations to
avoid the instability.
While March-Leuba and Blakeman [1991] and Hashimoto [1993] applied a linear model, a nonlinear model was developed by Munoz-Cobo, et. al [1996, 2000]. They integrated the momentum
equation in the time domain and demonstrated the out-of-phase instability by increasing the
feedback gain of the first subcritical mode.
Over the past several years, many mathematical models and computer codes have been developed,
and tests have been carried out to investigate density-wave and power-void instabilities in BWRs.
In the theoretical work done so far, stability analyses have usually been carried out by evaluating
the decay ratios and oscillation frequencies and studying the effect of certain parameters on BWR
core stability. Numerical simulations have been done to study the time evolution of certain phase
variables. The results of some of these stability analyses and numerical simulations have been
compared with test results or data collected from actual BWR instability incidents, and the overall
agreement has been reasonably good. This overall good agreement between the computational
and mathematical analyses, and the experimental tests and the actual operational BWR incidents,
has led to a better understanding of the instability phenomenon.
However, Van der Hagen et al [2000] questioned the use of decay ratio (DR) in BWR stability
monitoring. They argue that the DR can not give the stability margin which will mislead the
operator, since a small DR does not mean a high stability margin. They appeal that instead of
merely focusing on DRs, it would be beneficial to compare the sensitivity of the predicted DRvalues to independent reactor variables as well.
-7-
In contrast to forced circulation BWR instability, the number of references dealing with the
natural circulation BWR is limited. Aritomi et al. [1992] and Chiang et al. [1993] pointed out
three types of instabilities that might occur in natural circulation BWRs: geysering, natural
circulation oscillations, and density wave oscillations. They also found that such instabilities
could be suppressed above 0.5 MPa. At earlier stages, however, Mathisen [1967] reported large
amplitude oscillations even at high pressures. These instabilities were found to be induced by the
natural circulation flow dynamics. Therefore, the mechanisms that cause instabilities in natural
circulation BWRs at both low and high pressures deserve attention.
Recently, void flashing effects received much more attention in the research of the stability of
natural circulation BWRs under low-pressure start-up conditions [Inada et al. 2000, Van Bragt et
al. 2002, Yadigaroglu and Askari 2005, and Furuya et al. 2004]. Thermal-dynamic properties are
dependent on pressure: i.e. saturation enthalpy changes with pressure, which in turn induces the
flashing phenomenon (the sudden increase of vapor generation due to the reduction in hydrostatic
head). Manera [2003] investigated the dynamics of a flashing bubble with wire mesh sensors in
the CIRCUS facility. Furuya [2004, 2006] investigated the occurrence conditions and the
mechanism of flashing-induced instability experimentally in a relatively low system pressure at
the SIRIUS-N facility, which simulates a prototypical natural circulation BWR.
1.3.3 Review of Codes Capable of Simulating the BWR System
Stability
A wide variety of codes and models exists that may be used to address the stability issues,
ranging from sophisticated system codes, able to calculate an overall plant behavior, to very
simple models. All of them have the capability to quantify stability, although reliability may be
different. Multipurpose codes solving multi-dimensional equations both for neutronics and
thermal-hydraulics
are now available. On the other hand, simplified codes based on
Homogeneous Equilibrium Model (HEM) are still used in the same frame.
Several computer programs have been adopted to evaluate stability of BWRs and other boiling
channel systems. In describing them, two classes are considered following a generally adopted
classification. Examples of both can be seen in Table 1.2 [Hanggi, 2001].
-8-
* Frequency Domain Codes, whose purpose is the linear stability analysis of BWRs or other
boiling systems. In the frequency domain code, only linear equations rather than the full set of
differential equations are considered. Perturbing and Laplace transforming the neutron kinetics
equations allow easy inclusion of the fission power dynamics into the linear model for BWR
stability.
* Time Domain Codes, which include analysis tools specifically developed to simulate the
transient behavior of plant systems. These codes numerically integrate the differential equations
that describe the physical behavior of the system in time. They have the capability to deal with
the non-linear features of BWRs and are based in simulation techniques.
Table 1. 2 Common BWR Stability Codes
Common codes operating in the time domain
Name
RAMONA-3B
Thermal-Hydraulics
Model
Eq.
Channels
Neutronics Dimension
Owerner/User
all
D-F NE
4
3
ScandPower A/s
RELAP5/3D
a few
2 fluid
6
Point kinetics/3
INEL, NRC
RETRAN-3D
TRACG
4
a few
Slip EQ
2 fluid
5
6
1
3
EPRI
TRACE
a few
2 fluid
6
3
NRC
GE
Common codes operating in the frequency domain
Name
Thermal-Hydraulics
Neutronics Dimension
Owerner/User
3-5
3 simplified
RPI
5
Point kinetics
1
ORNL, NRC
SIMENS
Slip EQ
D-F NE
5
Point kinetics
1
GE
GE
D-F NE
4
3
FORSMARK AB
Model
Eq.
a few
D-F EQ
LAPUR5
STAIF
1-7
10
Slip EQ
D-F NE
FABLE
ODYSY
24
a few
all
Channels
NUFREQ NP
MATSTAB
SAB
a few
D-F EQ
4
Point kinetics
Eq.: number of conservation equations for thermal hydraulics
D-F: drift-flux description of two-phase mixture
NE: thermal non-equilibrium between phases
Slip: non-equal gas and liquid velocities
EQ: thermal equilibrium between phases
-9-
MIT
1.4 Thesis Work and Organization
The objective of this thesis is to assess the stability margin of NCBWRs, such as the ESBWR,
under normal operating conditions in comparison to the conditions in older BWR technology that
allowed natural convection at part load only.
As frequency domain methods can be used
efficiently to carry out sensitivity analyses, compared to time domain codes, a frequency domain
linear stability code is developed to investigate the NCBWR stability.
Zhao et al. [2005] at MIT developed a linear stability analysis code (SAB) for U.S. reference
SCWR design. Since the SCWR may undergo their same boiling during the start-up phase, he
also developed a two-phase capability. The code is programmed in MATLAB compiler. For
simplicity, the thermal-hydraulics Homogeneous Equilibrium Model (HEM) was used first. Later,
this approximation was expanded to non-homogeneous flow. A lumped fuel dynamics model
with the temperature distribution in the fuel pin developed at Brookheaven National Lab [Wulff
et al., 1984] is applied. The fuel dynamics model is coupled to the coolant thermal-hydraulics
model through the dynamics of the fluctuation of the fuel rods surface heat flux. The thermalhydraulic model is then coupled to the neutronic dynamic model through the fuel Doppler
reactivity feedback and coolant density reactivity feedback. The point kinetics model is used for
the neutronics in the code.
In NCBWRs, the DWOs will be always coupled with natural circulation instabilities. This
particular feature must be captured by the frequency domain code. To ensure the proper design of
NCBWR without instability problems, the SAB code is extended and applied in this work. The
scope of the current work includes:
(1) Increasing the capability of the original SAB code; adapting it to natural circulation situations.
By adding:
*
Capability of modeling natural circulation loop
*
Capability of applying non-uniform axial power profile
(2) Stability assessments of a NCBWR (ESBWR), both for thermal-hydraulic and neutroniccoupled stabilities, and comparison to those of a BWR (Peach Bottom 2) under both forced
circulation and natural circulation conditions.
(3) Develop guidance for designers to avoid the development of instabilities with large margins.
Sensitivity analyses of all 3 types of DWOs for both NCBWR and BWR.
*
Parameter sensitivity (inlet orifice, power, flow rate, axial power profile, reactivity
coefficient, etc.)
- 10-
Design feature sensitivity(long chimney, part-length fuel rode, shorter fuel rod, larger
reactor core, etc)
This thesis can be divided into 7 chapters. After the review of the two-phase flow instability and
BWR instability in Chapter 1, Chapter 2 describes a reference NCBWR design, ESBWR; Chapter
3 describes the methods of linear stability analysis in frequency domain used in the SAB code.
Then, single channel stability analysis is presented in Chapters 4. The coupled neutronics out-ofphase stability is analyzed in chapter 5 and the in-phase stability in Chapter 6. In the end, Chapter
7 presents the conclusions and recommendations for future work.
-11-
Chapter 2
Description of a Reference
Natural Circulation BWR (ESBWR)
Design
The Economic Simplified Boiling Water Reactor (ESBWR) is General Electric's latest evolution
of the BWR. It is used in our analysis as a reference NCBWR. The ESBWR evolved from the
design and operating experience of all the BWR in the past, especially from the innovations
developed for the company's earlier ABWR and SBWR. It has been announced as a simplified
reactor with a standardized design and first-rate economics [Hinds and Maslak, 2006]. Details of
the ESBWR design can be found in [Hinds and Maslak, 2006], [Rao, 2003], [Cheung, et. al.,
1998], and [GE Nuclear Energy, 2005]. In this chapter, the key features and required information
for stability analysis are described.
2.1 Overview of Design Features
The ESBWR plant design relies on the use of natural circulation and passive safety features to
enhance the plant performance and simplify the design. Table 2.1 (Table II in [Hinds and Maslak,
2006]) shows a comparison of some key plant features for several BWR designs. It shows that the
full benefit of natural circulation has been achieved in the ESBWR.
The use of natural circulation has allowed the elimination of several systems (Table 2.1),
including recirculation pumps (and associated piping, valves, motors, and controllers), safety
system pumps, and safety diesel generators.
-12-
Table 2.1 Comparison of Key Features [Hinds and Maslak, 2006]
Parameter
BWR/4
BWR/6
ABWR
ESBWR
Power (MWt/MWe)
3293/1098
3900/1360
3926/1350
4500/1550
Vessel height/dia
21.9/6.4
21.8/6.4
21.1/7.1
27.7/7.1
(m)
Fuel bundles,
number
Active fuel height
764
800
872
1132
37
37
37
3
Power density
(kW/L)
Recirculation pumps
Number/type of
CRDs
Safety system pumps
Safety diesel
generators
50
54.2
51
54
2 (external)
185/LP
2 (external)
193/LP
10 (internal)
0
205/FM
269/FM
9
9
18
0
2
3
3
0
Alternate shutdown
2 SLC pumps
2 SLC pumps
2 SLC pumps
2 SLC
accumulators
Control and
instrumentation
Core damage
(freq./yr)
Safety bldg vol
(m3/MWe)
Analog single
channel
10-5
Analog single
channel
Digital multiple
channel
Digital multiple
channel
10-6
10-7
108-
120
170
180
130
(m)
accumulators
The ESBWR has evolved over the past 10 years from the original 670 MWe SBWR taking
advantage of the economies of scale, enhancing the natural circulation core flow, retaining the
original passive safety features, but adding to the simplification with enhanced safety and
economics in mind. The approach to improving the commercial attractiveness of the ESBWR
compared to the SBWR was to follow a multiple approach by: [Hinds and Maslak, 2006]
*
Enhanced overall plant performance
*
Modular design of the passive safety systems
*
The use of natural circulation
*
Increased output and reduction in overall material quantities.
The ESBWR design has achieved a major plant simplification by eliminating the recirculation
pumps. The use of natural circulation, along with the desire to maintain the same or better plant
performance margins, resulted in the following key design features:
- 13-
*
Opening the flow path between the downcomer and lower plenum (elimination of internal
jet pumps)
*
Use of shorter fuel - resulting in a reduced core pressure drop
*
Use of an improved steam separator to reduce pressure drops
*
Use of a longer chimney to enhance the driving head for natural circulation flow
The selection of the optimum power level was based on the desire to utilize the synergism
between the ABWR and the SBWR and to utilize existing design and technology from the
ABWR - as an example, using the same diameter pressure vessel [Rao, 2003]. The ESBWR core
was also increased in size by adding more fuel assemblies to increase power level. Fuel height
was decreased to 3.0 meters in order to achieve the appropriate pressure drop, while the power
density was maintained at 54 kW/L. The core was increased from the 872 fuel assemblies in the
ABWR to 1132 fuel assemblies in the ESBWR, resulting in a thermal power rating of 4500 MWt.
2.2 Coolant flow path and conditionsin ESBWR
The ESBWR reactor coolant system is similar to that of the operating BWRs, except that the
recirculation pumps and associated piping are eliminated. Circulation of the reactor coolant
through the ESBWR core is accomplished via natural circulation. It is one of the key features to
achieve simplicity and improved plant economics.
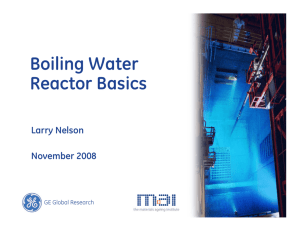
The magnitude of the natural circulation flow depends on the balance between the density driving
head and the pressure losses through the circulation path. Figure 2.1 shows a schematic diagram
of flow path and pressure drops inside the reactor vessel [Cheung, et. al., 1998]. The driving head
is proportional to the density difference between the fluid in the downcomer and the fluid inside
the core shroud, or proportional to the height of the chimney/upper plenum and core. The major
losses through the circulation path include those at the downcomer, core, chimney/upper plenum,
and separators. The core flow varies according to the power level, as the density difference
changes with changes in power levels. Therefore, a core power-flow map is only a single line and
there is no active control of the core flow at any given power level.
Typical thermal-hydraulic characteristics of the ESBWR core are compared with those of typical
BWR-6 and ABWR cores in Table 2.2 (Table 4.4-la in [GE Nuclear Energy, 2005]). Table 2.3
-14-
(Table 4.4-5 in [GE Nuclear Energy, 2005]) provides the flow path length, height, liquid level,
fluid volume, and flow areas for each major flow path volume within the reactor vessel.
It is shown that the design features discussed in Section 2.1 greatly reduce core pressure drop,
from 182 kPa of BWR/6 to 70kPa of ESBWR, which in turn enhances natural circulation. Also,
the ESBWR has a lower flow rate to achieve the lower pressure drop. Thus, the ESBWR has a
higher core power and a lower coolant flow rate compared to the existing BWRs. According to
the collected information, the power to flow ratio for the ESBWR is around 65% higher than that
of a typical BWR/6, and 75% higher than that of a typical BWR/4, Peach Bottom 2. This is not
totally surprising since the added voiding in the core helps natural circulation.
However, this
feature makes it more prone to unstable behavior. Thus, a stability analysis should be conducted
to ascertain that sufficient stability margins are maintained.
Separator AP
oe-Chimney AP
sad
Core AP
Fig. 2.1 Schematic of Flow and Pressure Drops in a Reactor
- 15-
Table 2.2 Typical Thermal-Hydraulic Design Characteristics of BWR Reactor Cores
General Operating Conditions
BWR/6
ABWR
ESBWR
Reference design thermal output (MWt)
Power level for engineered safety features (MWt)
Steam flow rate, at 420 'F final feedwater temperature (kg/s)
Core coolant flow rate (kg/s)
Feedwater flow rate (kg/s)
System pressure, nominal in steam dome (kPa)
System pressure, nominal core design (kPa)
Coolant saturation temperature at core design pressure (oC)
Average power density (kW/L)
Core total heat transfer area (m2)
Core inlet enthalpy (kJ/kg)
Core inlet temperature (oC)
Core maximum exit voids within assemblies (%)
Core average void fraction, active coolant
Active coolant flow area per assembly (m2)
Core average inlet velocity (m/s)
Maximum inlet velocity (m/s)
Total core pressure drop (kPa)
Core support plate pressure drop (kPa)
Average orifice pressure drop, central region (kPa)
Average orifice pressure drop, peripheral region (kPa)
Maximum channel pressure loading (kPa)
Average-power assembly channel pressure loading (bottom) (kPa)
3579
3730
1940
13104
1936
7171
7274
288
54.1
6810
1227
278
79
0.414
0.0098
2.13
2.6
182
151.7
39.4
129
106
97.2
3926
4005
2122
14502
2118
7171
7274
288
50.6
7727
1227
278
75.1
0.408
0.0101
1.96
26.7
168.2
137.9
60.3
122
75.2
65.5
4500
4590
2433
9034-10584
2451
7171
7240
288
54.3
9976
1183-1197
270-272
90.0
0.53
0.0093
1.12
1.15
70
41.3
20.3
37.1
24.4
21.5
Table 2.3 ESBWR Reactor Coolant System Geometric Data
Flow Path
Height and Liquid
Level (m)
Lower
Plenum
Core
Length (m)
4.13 (Axial))
1.78 (Radial)
3.79
Chimney
Upper
Upper
Plenum
Dome
Downcomer
Volume of Fluid
(m3 )
Average Flow
Area (m2 )
3.77/2-Phase
96
20.22
6.61
6.61/2-Phase
29.27
2.75
2.75/2-Phase
276 (includes upper
plenum)
276 (includes
276 (includes
chimney)
1.78 (Radial)
2.79 (Axial)
14.53
2.79/Steam
225
28.67
14.53/14.53
259
8.4
-16-
29.53
2.3 ESBWR core and fuel assembly description
The fuel assembly consists of a fuel bundle and a channel which surrounds the fuel bundle. A
Modified GE14 fuel assembly (to account for the shorter active fuel length) is adopted in
ESBWR. The GE14 design utilizes a 10x10 fuel rod array which includes 78 full-length fuel rods,
14 part length fuel rods and 2 large central water rods. Note that, while the pattern is 10x10, there
are actually only 94 rods due to the oversized water rods. The active fuel length is approximately
3.048 m. The active fuel length of standard BWR fuel assemblies is approximately 3.66 m. The
shorter fuel assembly provides a lower pressure drop which is important to enhance natural
circulation flow. The ESBWR core and fuel assembly design information are collected in Table
2-4, compared with those of BWR-4 (Peach Bottom 2). Most of the ESBWR data are obtained
from [GE Nuclear Energy, 2005]. The data of Peach Bottom 2 are collected from [Carmichael
and Niemi, 1978].
Table 2.4: ESBWR core and fuel assembly parameters
Parameter
Core
Thermal power
Power density
Equivalent core diameter
Vessel inner diameter
Fuel assembly
Fuel pin lattice
Assembly number
Number
mber of
of fuel
fuel pins
pins per
per
BWR/4 (Peach Bottom 2)
NCBWR (ESBWR)
3293MWt
50.7kW/liter
4.75m
6.375m
4500MWt
54kW/liter
5.883m
7.1m
Square (8x8)
764
Square 10x10
1132
63
92(78 full length, 14 partial length)
4.47m
3.66m
12.5 mm
0.86 mm
10.6 mm
3.79m
3.048m(2.032m for partial length rods)
10.26 mm
0.71mm
8.67mm
ssembly
Overall length
Active fuel length
Fuel pin OD
Cladding thickness
Pellet thickness
- 17-
Chapter 3
Method Description of
Linear Stability Analysis of BWR
Two-phase flow with boiling is one of the fundamental mass and heat transfer processes that
occur inside a boiling water reactor. Because of the chaotic nature of the two-phase flow, BWR
stability has been an important technical issue for a long time. This Chapter first presents a brief
overview of the dynamic system stability concept. Then, it describes the mechanism of Density
Wave Oscillations (DWO) in detail and the resulting BWR instabilities. Following that it gives
the fundamental conservation equations, fuel assembly heat conduction equations, and neutronic
equations. The BWR stability analysis methodology in frequency domain is introduced at the end.
3.1 Stability of a dynamic system
With enough fundamental physical analysis, a dynamic system can normally be represented by a
group of ordinary or partial differential equations. These equations could be linear or non-linear,
based on the specific equation structures. Techniques to analyze linear system stability have been
developed and used extensively [Peng, et. al., 1985]. New methods for assessing the non-linear
system stability and predicting the time-dependent behaviors are however still evolving.
The stability of a linear system can be analyzed by the Laplace Transformation in the frequency
domain. The output of the dynamic system R(t) and the input I(t) can be simply represented as Eq.
3.1, where "s" is the Laplace variable. Here, G(s) is the system transfer function and it has
polynomials of Laplace variable "s" as the denominator and the numerator. The roots of the
denominator are called "poles" and the numerator "zeros".
R(s) = G(s)I(s)
(3.1)
- 18-
For a given bounded input, I(t), if the system is stable, the output, R(t), should be bounded.
Normally, to test the stability of the system (Eq. 3.1), one can use an impulse input signal. Then
the system response is the inverse Laplace transform of the system transfer function,
N
R(t) = ~Riee,
(3.2)
i=1
Here, Ri is the residue of pole Pi. If the system is stable, the largest real part of the poles should be
negative, so that the induced oscillation amplitude decreases exponentially. Therefore, if all the
poles of a linear system have negative real parts, this system is stable. The real part of the most
unstable pole determines the relative stability or the stability margin.
Practically, one normally uses decay ratios to evaluate linear system stabilities without knowing
the detailed transfer functions. There are two decay ratios defined. One is the apparent decay ratio,
which is defined as the amplitude ratio of the first two peaks of the output of a system for a given
impulse input. For higher order linear systems, the amplitude ratios of any consecutive two peaks
are not constant but they converge to a value equal to a second order system with only a pair of
complex poles at the same position as the least stable pair of the original system. This value is
called asymptotic decay ratio.
The decay ratio is not a good measure to evaluate the stability of a non-linear system. Once a
non-linear dynamic system becomes linearly unstable and the solution is away from the
equilibrium solution, periodic solutions may show up. For a periodic solution, the corresponding
decay ratio is exactly 1.0. A linear system may become unstable with such a decay ratio, but the
non-linear system may be stable with such a periodic phase space trajectory, which is called a
limit cycle oscillation. Although the periodic solution may be stable, this limit cycle oscillation
state is treated as an "unstable" state. To assess the non-linear system stability, the system is
normally linearized around the equilibrium state. The stability margin is then determined by
linear stability evaluation techniques.
3.2 General BWR instabilities and physical processes
In a BWR, the heat generated in the fuel pellets is transferred to the outer surface of the fuel
cladding, where the water is heated and boiled through convective heat transfer. The steam
generated is sent to steam turbines to drive electrical generators. The water inside a BWR not
-19-
only functions as the coolant which removes the heat from the reactor core and keeps the fuel
assembly temperature lower than safety limits, but also participates in the nuclear fission chain
reactions as the moderator to slow down the fast neutrons. Thus, the BWR energy conversion
consists of two major physical processes: the neutronic process and the thermal-hydraulic process.
The BWR thermal-hydraulic process is a complicated physical phenomenon. The process can be
further divided into three dynamic processes: the fuel heat conduction, the in-core channel flow
dynamic, and the out-of-core flow dynamic. For a conventional BWR, the out-of-core flow
dynamic process includes the recirculation pump/loop hydraulic process and the upper
plenum/separator hydraulic process. In a NCBWR, the out-of-core hydraulic processes include
those inside the chimney, steam separator, and downcomer.
The neutronic feedbacks from the thermal-hydraulic dynamic processes are due to the moderator
density change and fuel temperature change. The BWR instabilities may be induced by the
feedback mechanism between the thermal-hydraulic and neutronic process. Without an external
oscillating reactivity change, unstable oscillations or sustained power oscillations may occur
between these two dynamic processes. A typical diagram of the coupling between these two
processes is shown in Fig. 3.1.
The density wave oscillations had been identified as the major cause of almost all the reported
BWR instability incidents [Lu, 1997]. Once the density wave instability occurs, the reactivity
feedback caused by delay in the change in void fraction with respect to the initial channel inlet
flow perturbation. If the delay is long enough, the reactor system may become unstable. The
neutron flux may oscillate with a frequency close to the inverse of the density wave time constant,
which is the transport time delay of the voids traveling through the core. This type of instability is
called a coupled neutronic-thermal-hydraulic instability. Under the influence of this type of
instability, the core neutron flux distribution and the corresponding power distribution may
oscillate in different modes. As discussed in Chapter 1, the fundamental mode of the power
oscillation is the so-called core-wide in-phase mode. In this mode, the reactor power throughout
the whole core oscillates in phase with the same frequency. Another mode is called the out-ofphase oscillation, in which the total reactor power may not vary greatly, but the local reactor
power density changes.
- 20 -
I`,
(5pext
Suext
ext
Fig. 3.1: Block diagram of the BWR instability
3.3 Mechanism of Density Wave Oscillations
From the point of view of the reactor designer, density wave oscillations (DWO) are considered
the most important instabilities. The mechanism of this mode is due to the feedback and
interaction between the various pressure drop components, caused by the lag introduced due to
the finite speed of propagation of kinematical density waves. Although neutronic coupling occurs
in DWO, for demonstration, only the mechanism of pure thermal-hydraulics oscillations is
discussed in this section.
The BWR fuel assembly is contained in a channel box to confine the coolant inside the assembly.
Consequently, a small fluctuation in the flow rate of any single channel will not affect the total
flow rate of the remaining channels. Therefore, a constant pressure drop boundary condition can
be imposed on that single channel. Also, the neutronic feedback due to flow fluctuation of a
single channel will not affect the whole core neutronic properties. Therefore, a single channel can
oscillate on its own without the neutronic feedback [March-Leuba and Rey 1993]. The
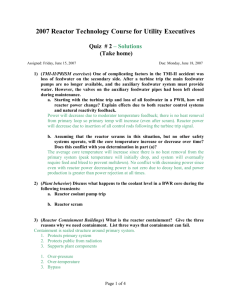
mechanism of single channel DWO in a parallel channel system can be illustrated by Fig. 3.2.
If some external forces or disturbances create a small change in the inlet flow, the local coolant
density in a two-phase system will experience fluctuation and a density wave will propagate
towards the exit along the flow. This density wave will cause the local pressure drop to fluctuate
or oscillate with some time delay with respect to the inlet flow. In some situations, the channel
21-
total pressure drop may experience an 180' phase lag with respect to the inlet flow as shown in
Fig. 3.2. The exit pressure will decrease, but the constant external pressure boundary condition of
a parallel channel system such as a BWR core will attempt to increase the inlet flow forcing the
channel flow to oscillate. The main driving force of density wave oscillations is due to the phase
lag between the response of the two-phase pressure loss and single-phase pressure loss.
For a two-region flow channel model, the feedback mechanism can be illustrated by Fig. 3.3. If
F1 (s) and
(S) are the transfer functions between an inlet flow oscillation and the pressure drop
F2
oscillations corresponding to region 1 and 2 respectively (region 1 represents single-phase liquid
region, compressible part; while region 2 represents the two-phase region, non-compressible part),
the system characteristic equation can be determined as follows:
If 6uext is the external disturbance of the inlet flow and & F is the flow feedback, the total
disturbance of the inlet flow is:
(3.3)
•, t = uext~ + SuF
Recognizing that
SAp, = SApI + 8Ap 2 = 0
(3.4)
One can obtain the following relationship between 6ut and 6 uext:
u94,
t
r= (s)
Suext
C,(s)+ 2(S)
(3.5)
ext
If H(s) = 1, (s) + F2 (s), then H(s) is the transfer function between the inlet flow oscillation
and the total pressure drop oscillation across the loop. Therefore, the characteristic equation of the
single channel stability is: H(s) = 0. For a stable system, all the eigenvalues of H(s) must have
negative real parts.
- 22 -
Feedback flow
wout
Exit
Total Pressure drop
Constant external pressure drop
.4
Ap=C
Inlet
Inlet flow
Fig. 3.2: Mechanism of DWO instability in a single heated channel
&ext
+
5
4uF
6Apt = 0
Fig. 3.3: Block diagram of flow feedback mechanism
3.4 Fundamental Equations
Mathematical models used to describe the dynamic behavior of each physical process of a BWR
system are discussed in this section. They include the fundamental two-phase flow equations, the
fuel pin heat conduction equations, and the neutron point kinetics equations.
3.4.1. Governing equations of the two-phase flow field
The basic equations used for describing the two-phase flow system start with conservation
equations of mass, momentum, and energy. For simplicity, the thermal-hydraulics Homogeneous
Equilibrium Model (HEM) is used first in our analysis. Later, this approximation is expanded to
non-homogeneous flow. The conservation equations for the HEM model can be described as
follows:
- 23 -
1) Mixture mass conservation equation
+am (p,,U) = 0
(3.6)
az
at
2) Vapor phase mass conservation equation
(apg,) +
at
(apug) =
(3.7)
-
az
A
,cfg
For homogenous flow, the following mixture velocity equation can be derived from the above
two mass conservation equations. The detailed derivation can be found in [Lahey and Moody,
1993]
au
_
az
Ph
(3.8)
hg Ac
3) Mixture momentum conservation equation
ap S= a_a+ a(G
f pmumi
2
/P,) + 2
+pg
az
at az
(3.9)
2De
4) Mixture energy conservation equation
ah,
ah,
PM -' + PMuam
at
az
qPh
(3.10)
Ac
To assure the suitability of HEM in a stability analysis, a comparison of HEM and NHEM has
been done. For the non-homogenous model, the Bestion drift-flux correlation [Bestion D., 1990]
was applied in this work. According to Coddington and Macian [2002], despite the simplicity of
this correlation, it yields very good results for most of the experimental data. This correlation has
the following form:
C O = 1.0,Vgi = 0.188
ggDeAp
D; A p
(3.11)
Pg
The conservation equations for non-homogeneous two phase flow model provided in [Saha,
1974] were applied:
- 24-
j
Vfg qPh
_
az
Vfg q Ph
apm +Ck
aum
at
Pm
az
at
Pm(
(3.12)
hfg Ac
+Um
hlf
am)
Ac
apm
az
az
(3.13)
= 0
fm
2De
aht + Um h,))i = P, + am a
-
Pm(a
M
az
Ac
Ot
az
a[
PmPg Pf
az Pm-P Pm
2
Pf'( PmPP
Pm
Ap
V
(3.14)
(3.15)
In Which,
Ck = j + Vg
U= j - (
Pm
(3.16)
(3.17)
1)Vg
(3.18)
Pm = (1- a)pf + apg
hm
(1 - a)p,
P
p h +
h,
Pm
Pm
(3.19)
In single phase region, the fluid density and flow velocity are assumed constant for simplicity.
3.4.2 Fuel assembly heat conduction equations
A lumped fuel dynamics model with the temperature distribution in the fuel pin developed at
Brookheaven National Lab [Wulff, et al, 1984] is applied in this thesis. The temperature profile in
the fuel, gas gap and cladding are illustrated in Fig. 3.4.
- 25 -
Fuel
Gas gap
I
Cladding
r
Tcoolant
Fig. 3.4: Fuel pin temperature distribution profile
Assuming a power polynomial for temperature distribution in the fuel pellet, it can be given as:
T, = TO + bý + cý
Where, ý =
2
(3.20)
r
R,
Assuming a linear temperature distribution in the thin cladding, the temperature can be given as:
Tc = T2 + d7r
Where,
r-R
(3.21)
2
2
R 3 - R2
(R 2 < r < R 3 )
Solving the Fourier heat transfer equation with the above temperature distributions, one obtains:
dTpi,
dt
2
kc
NBi(T
(R3 -R 2 )R3 (PCp)f 1 +(Cgm +Fpr)NBi,c]
Where,
Tpi, : Average temperature of the fuel pin
- 26-
-
R
qv
(,o%)f
(3.22)
NBi,c =
h (R - R2)
2
•R+[
][ 3 ( R
2
Cgm
Cgm = (
R3
F
2 + R
C(•fc
4 kf
(R 3 -R 2 )R 3
) -
(R3 - R2)
6(R2 +R3
k
2
3
6(R 2 R 3 )
R3
R3
pr
(3.23)
kc
kc
1
1
]
(3.24)
)
(3.25)
R1 hgap
From Fig. 3.4, the fuel rods surface temperature, fuel pin average temperature and the coolant
bulk temperature can be derived as:
T, - T =
(3.26)
p
[1 + (Cgm + Fpr)NBi,c]
The Dittus-Boelter correlation is applied in this analysis to calculate the heat transfer coefficient
in single-phase region, and the Chen's correlation in two-phase region. The details of these
correlations could be found in [Todreas and Kazimi, 1990].
The fuel is dynamically coupled to the coolant thermal-hydraulics model through the dynamics of
the fluctuation of the fuel rods surface heat flux.
Applying perturbation, linearization and
Laplace transformation (see Chapter 4 for details) of the above Equations (3.22), (3.26) and heat
transfer correlation, we can determine the fluctuation of the fuel rods surface heat flux as a
function of coolant density, velocity and enthalpy oscillations. Plugging it into the coolant
thermal-hydraulics dynamics model, the characteristic equation of the coupled fuel dynamics
model can be derived.
3.4.3 Neutronic equations
The most widely used equation to model the dynamic neutron flux distribution inside a reactor
core is the time dependent multi-group diffusion equation. However, it uses time dependent and
space dependent cross-sections, which are determined by the reactor local thermal-hydraulic
conditions and control rod positions. As a result, the equation becomes non-linear and too
difficult to solve. For simplicity, the point kinetics equation is used in this work.
- 27 -
The point kinetics method assumes that the spacial and time dependent neutron flux and delayed
neutron precursor concentration are separable functions of time and space. The neutron energy
spectrum, the normalized flux and delayed neutron precursor space distribution functions are
independent of the time. These assumptions greatly simplify the multi-group diffusion equations.
The point kinetics neutron density equation is then given as:
n p(t
)n(t) +
Ci (t)
(3.27)
Ai=1
dt
and the delayed neutron precursor density equation is:
dC
d
dt
i
=-Ai -k n(t) - ACi i (t)
(3.28)
A
The above equations also predict the reactor transient behavior reasonably well, if the reactor
normalized spatial neutron flux distribution does not change significantly during a transient.
To take into account the reactor thermal-hydraulic feedback, instead of calculating the local cross
section change, the point kinetics method uses the feedback reactivity. The feedback reactivity
represents the overall effect of changing thermal-hydraulic conditions throughout the whole
reactor core. The two major feedback mechanisms are the moderator density change and the fuel
Doppler effects. There are weighting schemes to calculate the appropriate overall feedback
reactivity due to changing local thermal-hydraulic conditions.
Because of its simplicity, the point kinetics model has been widely used to predict the reactor
kinetics behavior and the onset of the instability. The disadvantage of the point kinetics model is
that it can not predict local power distribution changes during a reactor transient. However,
during an out-of-phase instability, the high harmonic neutron spatial distribution modes are
excited even if the fundamental mode is stable. To obtain the dynamic features of the high
harmonic modes, a modal expansion method is used. The details could be found in Chapter 5.
3.5 Frequency Domain Linear Analysis Method
Frequency domain method deals only with linear equations rather than the full set of differential
equations. It is obtained from the discretized system equations. The differential and constitutive
equations are linearized by representing each state variable with its steady state value and a
deviation from steady state, expanding nonlinear terms in Taylor series, and neglecting higher
- 28 -
order terms. The frequency domain linear system of equations is obtained by applying the
Laplace transformation to the resulting linear equations.
As described in Section 3.1, if all the zeros of the characteristic equation have negative real parts,
the disturbance will asymptotically decay away and the system is stable. After sufficient time, the
system stability boundary can be determined by the zero which has the largest real part. This zero
is called the dominant eigenvalue. To determine the dominant eigenvalue, an inverse iteration
combined with Newton's method is applied for solving the characteristic equation.
One advantage of the frequency-domain (FD) approach is that it takes less computing time
compared to the time-domain (TD) approach. This is because the FD approach deals with only a
linear system of equations, whereas the TD methods must solve the full set of differential
equations. Another advantage of the FD approach is that it is not plagued by the numerical
stability difficulties inherent in TD methods. Finally, the FD approach has the capability of
describing an oscillation with one single complex number (eigenvalue), from which a decay ratio
(which is defined as the ratio between the first and second peaks of system oscillation in the
impulse response) could be calculated. Denoting the dominant eigenvalue by
decay ratio of the system can be determined as: DR = exp(2T -).
= o + ia , the
In this work, following the
standard approach for BWR stability analysis, the decay ratio is used as the criterion for stability.
To conduct stability analysis, the BWR core and reactor vessel are divided into a large number of
nodes. The thermal-hydraulic conservation equations, constitutive equations, along with neutronic
equations form a system of nonlinear equations, which can be solved numerically by dividing the
flow channel into axial computational nodes. First, the steady state parameters for each node,
including coolant temperature, enthalpy, velocity, density, flow quality, cladding and fuel
temperature, are solved. Then, after applying a perturbation, linearization and Laplace
transformation of the conservation equations for each node, the characteristic equation of this
single channel is derived by integration of the momentum equations. The detailed procedure for
the characteristic equation derivation can be found in the following chapters.
- 29-
Single Channel ThermalChapter 4
Hydraulic Stability Analysis of BWRs
4.1 Stability Characteristics
The single channel type DWO is discussed in this Chapter. Under such conditions, only one
channel or a small fraction of the parallel channels oscillates, while the other channels remain at
steady state. This imposes a constant pressure drop boundary condition across the oscillating
channel or channels. During the single channel oscillation, only a small fraction of the core flow
oscillates while the bulk flow remains at steady state. Therefore, the neutronic feedback due to
this small fraction oscillation can be neglected. In other words, the thermal-hydraulic dynamics is
decoupled from the neutronic dynamics in the single channel oscillation.
The main parameters that influence the single channel DWO, as reported by [D'Auria, 1997] and
[Ishii, 1976], are:
*
An increase in mass flow rate increases stability,
*
An increase in power decreases stability,
*
An increase in overall density ratio decreases stability,
*
An increase in power input to the channel increases oscillation frequency,
*
An increase in inlet sub-cooling increases stability at high sub-cooled condition,
*
An increase in system pressure for a given power input increases stability,
*
A decrease in heated length increases the flow stability.
-30-
Ishii [1971] characterized the primary governing parameters for two phase flow instability by a
Subcooling Number and a Phase Change number. A Stability Map was constructed by using these
two dimensionless parameters. A typical Stability Map is shown in Fig. 4.1.
The subcooling number was defined as:
Nsub = (h -hi)
hfg
Ap
Pg
(4.1)
The subcooling number scales the inlet subcooling and is the dimensionless residence time of a
fluid particle in the single phase liquid region. The phase change number was defined as:
Vfg q Ph L
ch-hg
(4.2)
Ac ui,
The phase change number scales the rate of phase change due to heat addition.
E
z
ra,
Phase Change Number, N,,h (-)
Fig. 4.1: Typical Stability Map
Although instabilities are common in both forced and natural circulation (FC and NC) systems,
the latter is more unstable than the first due to a regenerative feedback inherent in the NC process
and its low driving force. For example, any disturbance in the driving force of a NC system will
affect the flow which in turn will influence the driving force leading to an oscillatory behavior,
even in cases where eventually a steady state is expected. In other words, a regenerative feedback
is inherent in the mechanism causing NC flow due to the strong coupling between the flow and
-31 -
the driving force. As a result, the NC systems are more unstable than FC systems due to the above
reasons.
Flashing instability is expected to occur in NC systems with tall, unheated risers. The
fundamental cause of this instability is that the hot liquid from the reactor core outlet experiences
static pressure decrease as it flows up and may reach saturation near the exit of the riser causing it
to vaporize. The increased driving force generated by the vaporization, increases the flow rate
leading to reduced exit temperature and suppression of flashing. This in turn reduces the driving
force and flow causing the exit temperature to increase once again leading to the repetition of the
process. However, the instability is observed only in low-pressure systems. Since the objective of
this thesis is to determine the margin for stability of NCBWRs under rated, high pressure
conditions, the flashing-induced instability is not addressed here.
4.2 Construction of the Characteristic Equation
As discussed in Section 3.3, for a two-region flow channel model, if F , (s) and F 2 (S) are the
transfer functions between an inlet flow oscillation and the pressure drop oscillations
corresponding to compressible and non-compressible region respectively, the characteristic
equation of the single channel stability is: HI(s) = F- (s) + -2(s) = 0 . The characteristic equation
is then just the transfer function between the inlet flow oscillation and the total pressure drop
oscillation across the channel.
To conduct a single channel stability analysis, the BWR core and reactor vessel are divided into
an appropriate number of radial and axial nodes. The thermal-hydraulic conservation equations,
constitutive equations, along with neutronic equations form a system of nonlinear equations,
which can be solved numerically by dividing the flow channel into axial computational nodes.
First, the steady state parameters in each node, including coolant temperature, enthalpy, velocity,
density, flow quality, cladding and fuel temperature, are solved. Then, after applying perturbation,
linearization and Laplace transformation of the conservation equations for each node, the
characteristic equation of this single channel is derived by integration of the momentum equations.
- 32-
4.2.1 Channel Nodes Model
To derive the characteristic equation, the NCBWR core axial channel is divided into five sections,
namely the inlet orifice, grids (including lower tieplate, upper tieplate, and spacers), the heated
section, the lower and upper non-heated sections. Note that the heated section is divided into
three parts, allowing the geometric parameters of the flow channel in the two-phase region to be
changed due to the part-length fuel pins in the assembly. The channel flow diagram of the
chimney plus core is shown in Fig. 4.2a, and the heated region in the core in Fig. 4.2b.
k
I
Chimney
LNon-heated region
II
1
At
I-
Core
It
Heated region
LNon-heated region
4
ft
Inlet orifice
U
(a)Core + Chimney
A
b,
Two-phase fluid (above
part length fuel)
Two-phase region
including part length rods)
9
Single phase
region
F
(b)Heated Region
Fig. 4.2: Channel Flow Diagram
-33 -
t
-t- ti
U,
t t t t
t
4.2.2 Friction Factors and Pressure Drop
For the single-phase liquid region the following friction factors [Todreas and Kazimi, 1990] are
used:
For Re = 3x10 4 -106:
f = 0.184Re -0 2
(4.3)
For Re < 3 x 104 :
f = 0.316 Re-025
(4.4)
In the single phase liquid region, the friction factor is assumed constant and equal to f,, which is
the friction factor at the boiling boundary. In the two phase mixture region, the friction factor may
be expressed in the following form [Ishii, 1971]:
f 2 =Cmf
(4.5)
For high system pressure and reasonably high exit qualities, Cm ranges from 1.5 to 2.5. Thus,
Cm = 2.0 was taken both by Ishii [1971] and Saha [1974] in earlier analysis. In this work we
also use C. = 2.0, which means the two-phase friction multiplier is twice the HEM value of
The pressure drop coefficients are used to account for the form pressure drop at the inlet orifice,
tie-plates and spacers. For example, the pressure drop at the inlet orifice can be expressed as:
fU2
APori = kin
(4.6)
2
Where k, is the inlet orifice coefficient.
4.2.3 System Steady State Calculation
If the BWR flow channel is divided into a large number of axial nodes, the thermal-hydraulic
conservation equations can be solved numerically along the computational nodes. Given the inlet
boundary conditions, the steady state parameters at each node, including coolant temperature,
enthalpy, velocity, density, flow quality, cladding and fuel temperature, are solved by marching
up the nodes, as shown in Fig. 4.3.
- 34-
uk+1
uk
uin
k+1
k+1
I
k
hin
k
k +1
k
p.
Fig. 4.3: Steady state channel calculation by marching up the nodes
(1) Single-phase heated region
By assuming constant liquid density in this region, the steady state parameters can be easily
obtained. Using the conservation equations discussed in Section 3.4, the resulting parameters for
any node are:
(4.7)
u(k)= ui
q (k - 1)PhdZ
GAC
h, (k)= h, (k - 1)+
T (k) = T (k - 1)+
(4.8)
h 1(k) - h (k - 1)
(4.9)
Co
The pressure drop in this single phase region can be calculated as:
APJ = p, gA + f s
A G2
(4.10)
De 2 pf
In which A2is the heated length to the onset of nucleate boiling.
(2) Two-phase heated region
Using the two-phase conservation equations discussed in Section 3.4, the following steady state
parameters are obtained, ignoring the presence of subcooled boiling:
um(k)= um(k - 1)+
fg
hg
q
dz
Ac
(4.11)
-35-
(4.12)
P (k)= G/um(k)
Xeq(k)= Xeq(k - 1)+ --
h dz
(4.13)
GAchfg
The pressure drop in this region can be calculated as:
APm =
APm(k)
(4.14)
k
Where, APm (k) is the pressure drop in the k-th node.
G
APm(k) =(
2
G 2
-
+ P) gdz + fm
P (k+ 1) pm (k)
dz
G2
(4.15)
De 2pm (k)
(3) Inlet mass flow rate calculation
The above calculation is given by knowing the inlet mass flow rate. However, under natural
circulation conditions, the mass flow rate is decided by the flow conditions (no longer an input of
the code). The magnitude of the natural circulation flow depends on the balance between the
density driving head and the pressure losses through the circulation path. Figure 2.1 shows a
schematic diagram of the flow path and pressure drops in the reactor. The driving head is
proportional to the density difference between the fluid in the downcomer and the fluid inside the
core shroud, or effectively proportional to the sum of the heights of the chimney/upper plenum
and core. The major losses through the circulation path include those at the downcomer, core,
chimney/upper plenum, and separators. The core flow rate varies proportional to the power level,
as the density difference changes with the power levels, and there is no active control of the core
flow at any given power level. The driving head in the cold downcomer and the pressure losses in
the heated side must be balanced.
(4.16)
APhot = APcold
In which,
Pf g(Lcore +
APcold
Lchimney
+ Lupper-plenum +
Ld
Lseparator
L dc
G2
dc
(4.17)
Dedc 2 pf
AP
= AP
+±AP
core
hot
Pcore
grav
chimney
Pacc
+AP
+ AP,(4.18)
upper-plenum
fric
inlet
separator
Pgrid
(4.19)
Neglecting friction pressure loss in the chimney and upper plenum,
APchimney
+ Aupper-plenum =
mg (Lchimney + Lupper-pienum)
-36-
(4.20)
APseparator
= Ksp
G2
+ p,, gL
(4.21)
Depending on the balance between the driving head and the pressure losses, the inlet mass flow
rate could be calculated by iteration.
4.2.4 Derivation of Characteristic equation
After the steady state parameters are calculated in each node, we introduce small perturbations
around the equilibrium parameters and neglect the higher order perturbation terms, and then apply
Laplace transformation to the conservation equations for each node, the linearized set of
perturbation equations in frequency domain are constructed. After solving the perturbation
equations numerically along the axial computational nodes, as indicated in Fig. 4.4, the
characteristic equation of this single channel is derived.
Uik+l
hk+l
9Pk+l
9kk
9Pk
k+1
k
Fig. 4.4: Transient channel perturbation calculation by marching up the nodes
(1) Single phase heated region
A constant liquid density is assumed in this region. Then after perturbation, linearization, and
Laplace transformation, the set of perturbation equations would be:
adu
dd=p
d
dz
(4.22)
= O,or 9u,(z)= Sui,
sp= ui, +
f,G~i
-
(4.23)
De
-37-
dSh
s
d +
dz
ui,
+
qP
h
AcPfU
2Sh
u
_
P
h
in A G
Sq
=0
(4.24)
Then, F, (s), the transfer functions between an inlet flow perturbation and the pressure drop
perturbations in this region is:
F,(s) =
SAP
Suin
(4.25)
Where
f G2
N,
SAp(k) + (pg +
SAP =
(4.26)
)s
D, 2 p,
k=1
SAp(k) = sp(ui,dz + f GSu
De 1
dz
(4.27)
De
S2 is the perturbation of the heated length of the single phase region. When calculating the total
pressure drop oscillations in the single phase heated region, we need to consider the effects of the
perturbation of boiling boundary. The perturbation of the boiling boundary can be expressed as:
2=
PyACU
A
c uin (s,i )
(4.28)
q (2 )Ph
Where &h(s,2) is the perturbation of the fluid enthalpy at the boiling boundary. It can be solved
by using the energy perturbation equation (4.24).
Sh(k + 1)= (1- sdz )Sh(k) - q (k)Phdz
2
uin
AcPfUn
in
+ Phdz Sq" (k) = 0
AcG
(4.29)
(2) Two phase heated region
The saturated liquid and saturated vapor density are assumed constant in this region. For
simplicity, the thermal-hydraulics Homogeneous Equilibrium Model (HEM) is used first in our
analysis. Later, this approximation is expanded to non-homogeneous flow. After applying
perturbation, linearization, and Laplace transformation, the set of perturbation equations become:
d
SSpm +-d (Pm8u
m + UmSPm ) = 0
(4.30)
dz
dSu__(z)
d (Z)
dz
Vfg
Ph
hf Ac
(z)
(4.31)
-38-
dSAjp
d
= s(pmif
+ um2,Pm•)
d (2pUMU,
+U,5PM)+
2
Ump
+ _
-+ug
dz
dz
d dz+ +hm
(Pm.
dz
u
m
+
G
(2p
P
+U2
U+ 9m )+ gSpm (4.32)
2De
umSPm ) q Ph + -AG
usm
AcG
APh
= 0
(4.33)
AcG
ur
The set of perturbation equations can be solved numerically by using the following difference
scheme:
5Um (k + 1) = 8um (k)+ dz
, (k + 1) =
Pm(k)
um (k + 1)
VP
fg
h
q (k)
(4.34)
hfg A c
(k)u+
um(k)
(uk) (k) - sdz)
um(k + 1)
p,, (k + 1)
S(k (k )
u, (k +1)
(4.35)
hfg Sp,m (k + 1)
,n(k + 1) =
(4.34)
vfg, p (k + 1)
Then, F 2 (s), the transfer functions between an inlet flow perturbation and the pressure drop
perturbations in this region can be obtained.
F 2 (S) =
(4.35)
2
Suin
Where
V
N2
SAP 2 =
q () + f g +
SAp(k) - (G*
k=l
G2
P
hfg A c
)
D
e
(4.36)
2p,
The second term is due to the effects of the perturbation of boiling boundary. The first term can
be calculated by summing up the pressure perturbation in each node.
SAp(k) = 2G5um (k + 1) + u2 (k + 1)SPm (k +1) + (SP, (k)dz - 2G + f2Gdz)Sum (k)
De
+ (SUm (k)dz - u (k) +
2De
+ gdz)SPm (k)
(4.37)
In our analysis, the heated two-phase region is divided into two parts (see Fig. 4.2b) to account
for the geometry change of the flow channel due to part-length fuel rods. The Equations (4.30) to
-39-
(4.37) above are applicable in both parts, but some constant parameters, such as Ph, Ac, De, G,
and f 2 , are different.
(3) Two phase unheated region
In this region, for an adiabatic two-phase flow, the set of perturbation equations would be:
d•
m
(Z)
0
(4.38)
dz
d
SSPm + U
d
SPm = 0
sAp P 94
dz
m
(4.39)
dz
+
+f
(2PmumU&
m
+ U 2pm) +
s Sh = 0
(4.40)
(4.41)
Solving the above perturbation equation numerically, we obtain the perturbation parameter at
each node:
Sum (k) = SUm(1)
(4.42)
(k - 1)
(4.43)
_hm (k) = (U m - sdz) hm(k - 1)
(4.44)
SP, (k) =
- sdz)
(Um
Um
Um
SAp(k) = (S/Um + fm /De)GdZSUm (k)+(fm /(2De)U2 + g)dziPm (k)
(4.45)
Then, F3(s), the transfer functions between an inlet flow oscillation and the pressure drop
oscillations in this region can be obtained.
F3(s)=
SAP3
6
(4.46)
in
Where
N3
SAP 3 => SAp(k)
(4.47)
k=1
(4) Inlet orifice or spacer grids
- 40 -
Since only form pressure drop are accounted for at the inlet orifice, tie-plates and spacers, the
pressure drop at those positions, e.g. spacer, can be expressed as:
2
(4.48)
mkspacer PspacerUspacer
spacer
Applying linear perturbation and Laplace transformation of the above equation yields:
2
O/Pspacer=Cmkspacer
PspacerU spacer
spacer)
sp Pspacer
spacer
spacer spacer
(4.49)
where kspacer is the spacer pressure loss coefficient; Cm is the two-phase friction pressure loss
multiplier, where Cm = 1 for single phase liquid flow, and Cm = 2 for two phase mixture flow;
3
Pspacer and uspacer are the local density and velocity at the spacer; and Pspacer and Suspacer are
perturbations of local density and velocity at the spacer.
(5) Perturbation of wall heat flux
From the fuel heat conduction equation, the perturbation of heat flux at each node, iq (k), can
be solved.
A lumped fuel dynamics model is discussed in section 3.4.2. Perturbation, linearization and
Laplace transformation of the Equations (3.22) and (3.26) and heat transfer correlation, we can
find the fluctuation of the fuel rods surface heat flux as function of coolant density, velocity and
enthalpy oscillations. The detailed procedure can be found in [Zhao et al., 2005]. The result is:
1
[= +
h
where
2
+
sR3(PCp)f
Cgm,
(Cgm + Fpr )(R
3
- R2)
]q
kc
=
q", h
h
h
+ (
R1
R3
)
2
t'v
(pc,p)
hoo
(4.50)
Cpo
Fp,, R 1, R 2, and R3 have been defined in Section 3.4.2. &Sqis the oscillation of
internal volumetric heat density in the fuel pin, Sq, = 0 for single channel stability analysis. h
is the heat transfer coefficient at the wall.
The Dittus-Boelter correlation was applied in this analysis to calculate the heat transfer
coefficient in the single-phase region,
Nu = 0.023 Re
8
Pr0.4 , when the fluid is heated
-41 -
(4.51)
After perturbation, linearization and Laplace transformation of the Dittus-Boelter correlation, one
obtains:
&h
_= 0.8
h
SpcU,
+ PoogUo
(4.52)
POUm
Following the same steps, the equation similar to (4.52) could be deduced for the Chen's
correlation used in the two-phase region.
(6) Construction of the characteristic equation
Summing up all the oscillations of pressure drop through the coolant channel, the characteristic
equation can be constructed.
H(s) = F 1(s) +
+
2 (S)
(4.53)
3 (S)+...
Using the perturbation equations described above, the characteristic equation of thermalhydraulic Homogeneous Equilibrium Model (HEM) for the single-channel stability analysis is
constructed. Following the same procedures, the characteristic equation of thermal-hydraulic
Non-Homogeneous Equilibrium Model (NHEM) could be derived. Details of the perturbation
equations of NHEM will be discussed in Section 4.3.4.
4.3 Density Wave Stability performances of ESBWR and a
normal BWR
In order to account for regional stability of the ESBWR, the acceptance criteria used by GE for
the single channel decay ratio was constrained to less than 0.5 [GE Nuclear Energy, 2005]. We
also adopt this conservative criterion in this work for the larger NCBWR core and the uncertainty
of the analysis method.
In this section, the single channel stability is evaluated for the highest power channels by
perturbing the inlet flow velocity while maintaining constant channel power and constant pressure
drop. Uniform axial power profile was first used. Then, effects of non-uniform power distribution
and enhanced chimney are analyzed. Furthermore, results of the HEM and NHEM are compared.
Finally, the sensitivity of NCBWR stability to different operating parameters is assessed and
compared to BWR (Peach Bottom 2) at both rated and natural circulation conditions.
- 42 -
4.3.1 Stability performance under design conditions with uniform
axial power distribution (HEM)
The hot channel design parameters and the calculated decay ratios are listed in Table 4.1 for both
the NCBWR and BWR. Uniform axial power shape is applied in both the NCBWR and the BWR.
This assumption will be released later in the parameter sensitivity analysis. Compared with the
BWR parameters, the following design parameters will affect the single channel stability for the
NCBWR:
* Higher power to flow rate ratio (reduces stability)
* Lower radial power peaking factor (enhances stability)
* Higher Inlet orifice coefficient (enhances stability)
From Table 4.1, we can see that the NCBWR has a higher decay ratio, i.e. smaller stability
margin compared to a typical BWR. But it is still stable, with a large stability margin.
Table 4.1: Parameters for hot channel stability analysis
Parameter
BWR
ESBWR
Average assembly power(MW)
4.31
3.98
1.4
1.33
Assembly flow rate(kg/s)*
13.67
7.59
Inlet enthalpy(kJ/kg)
1211
1190
Inlet temperature( o C)
275
271
Inlet orifice coefficient
31.1
42.1
0.0101
0.0093
Heated length(m)
3.66
3.048
Overall length(m)
4.47
3.79
Radial power peaking factor
Flow area(m2)
-1.37 + 4.63i - 1.12 + 4.25i
Calculated dominant root
Decay Ratio
0.155
0.19
Frequency(Hz)
0.74
0.68
*: Assumed total 10% bypass flow and water rod flow for ESBWR, 14% for Peach Bottom 2.
- 43 -
4.3.2 Parameter sensitivity analysis
(1) Sensitivity analysis of non-uniform axial power distribution (HEM)
Since a uniform axial heat flux is unrealistic, a sensitivity analysis of the axial power distribution
has been conducted. First, a realistic axial power distribution at the beginning of reactor lifetime
of ESBWR is adopted. Then, a general power shape function: P(z) = A, sin(;r(z / H) " ) is
used in the sensitivity analysis. By changing the power shape factor n, the effect of power
distributions can be determined. The effect of non-uniform power shape has been examined in
other studies, but it is included here to highlight the significance of the more bottom peaked axial
shape of ESBWR in stability studies. The power ratio versus realistic power distribution and
power shape functions are shown in Fig. 4.5 and Fig. 4.6 respectively. The decay ratios calculated
for different axial power distributions are shown in Fig. 4.7.
Relative Axial Power(BOC)
0.5
0.5
1
1.5
Z (m)
2
Fig. 4.5: Relative axial power at BOC
- 44 -
2.5
3
n
4
z(m)
Fig. 4.6: Diagram of different power shape functions
n ~e
0U.5
0.5
0.45
DR of Non-uniform p er distribution at BOC
DR of Uniform power distribution
DR of Uniform power distribution
0.05
1
1.2
1.4
1.6
1.8
2
2.2
2.4
2.6
2.8
Power Shape Parameter, n
3
Fig. 4.7: Effects of non-uniform axial power distribution
As seen in Fig. 4.7, a bottom peaked power distribution has a larger decay ratio. It is clear that a
bottom peaked power distribution causes boiling to occur earlier, thus increasing the two-phase
flow region and core average void fraction, hence making the reactor less stable.
- 45 -
(2) Base cases for Sensitivity analysis (non-uniform power distribution (NU), HEM)
To compare the stability performance of the BWR to that of the NCBWR, a similar axial power
distribution should be applied in the sensitivity analysis. It is shown in Fig. 4.7 that the ESBWR
decay ratio of the power distribution at BOC is close to that when the power shape parameter n
equals to 2, since they have similar shapes. Thus, the general power shape function:
P(z) = -sin(r(z / H)
2
1/ 2
) is used in the BWR sensitivity analysis. The calculated decay ratios
of all conditions are shown in Table 4.2, and will be used as the base cases for parameter
sensitivity analyses. Comparing the results of Table 4.1 and Table 4.2, it is seen again that the
bottom peaked power distribution has a smaller stability margin.
It is not surprising that the decay ratio of a BWR at natural circulation condition is much higher
than those of BWR and NCBWR at rated conditions. This is consistent with the historical
findings that some experiments and analyses have indicated that hydraulic oscillations can occur
around the knee in the power-to-flow curve of BWR operating conditions.
As a reminder, the NCBWR stability performance in start-up process should be studied in the
future.
Table 4.2: Power and Mass flow rate for sensitivity analysis (NU, HEM)
BWR at rated
BWR at natural
NCBWR at rated
condition
circulation condition*
condition
1.4
1.4
1.33
Average bundle power (MWt)
4.31
2.6
3.98
Flow rate in the hot bundle (kg/s)
15.9
4.55
7.8
Decay Ratio
0.21
0.72
0.28
Parameters
Radial Power peaking
*: maximum natural circulation point in BWR/4 power-flow map
(3) Inlet orifice coefficient sensitivity analysis (non-uniform power distribution, HEM)
The inlet orifice coefficient plays a very important role in the system stability characteristics. The
decay ratios at different inlet orifice coefficients for the hot channel are shown in Fig. 4.8.
- 46 -
1
-e-- NCBWR
S•BWR
0.8
---------- --- -0.
BWRatN.C.
tNC
~BW
0o
tl- -I
oCz
0z
T
p
0.2
A'
I
-
I
-I
-
I-----
-e_-
V
I
I
· ·
10
20
30
Inlet orifice coefficient
40
Fig. 4.8: Inlet orifice coefficient sensitivity analysis (NU, HEM)
From Fig. 4.8, it is seen that the decay ratios of NCBWR and BWR increase significantly for
smaller inlet orifice coefficient. A minimum inlet orifice coefficient of about 20 is required to
satisfy the stability criterion of a decay ratio below 0.5. It is well known that the single phase to
two phase pressure drop ratio plays a significant role in the stability. The system is more stable
for a higher single-phase fraction pressure drop. Since in all BWRs, the core inlet temperature is
near the saturation temperature, the single-phase pressure drop is mainly due to the inlet orifice
pressure loss. Thus, the NCBWR and BWR stabilities are similarly sensitive to inlet orifice
coefficient.
It is not surprising that the decay ratio of the BWR at natural circulation condition is higher than
one when the inlet orifice coefficients are less than 20. This is consistent with the historical
finding that BWRs are susceptible to unstable oscillations around the maximum natural
circulation conditions and should be forbidden to operate under this region, as seen in Fig. 1.1.
(4) Power and mass flow rate sensitivity analysis (non-uniform power distribution, HEM)
As the flow rate is uncontrolled under natural circulation conditions, the mass flow sensitivity
analysis was conducted only for BWR under forced circulation conditions. It is performed by
changing the mass flow rate while keeping the power and other operating parameters constant.
Similarly, the power sensitivity analysis was performed by changing the system power while
- 47 -
keeping other operating parameters unchanged. The decay ratios at different power and mass flow
rate are shown in Fig. 4.9 and Fig. 4.10, respectively.
,^
r,
70
80
90
100
Percentage of nominal flow (%)
110
Fig. 4.9: Mass flow rate sensitivity analysis (NU, HEM)
L
0.8
0.6
-
ESBWR
--
BWR at full power
---
BWR at N. C.
0.4
-.-...
.
.. . . .
.
. . ..
. . ..
. .. .
0.2
1.1
1~2
Fraction of nominal power
1.3
Fig. 4.10: Power sensitivity analysis (NU, HEM)
From Fig. 4.9 and Fig. 4.10, it is observed that the decay ratios of the NCBWR and BWR
increase proportionally to increasing power or decreasing mass flow rate. This result is consistent
- 48-
with the general understanding that the reactor is more stable with smaller power-to-flow ratio. It
is also seen that the NCBWR still satisfies the stability criterion at 120% nominal power.
4.3.3 Design feature sensitivity analysis (non-uniform
distribution, HEM)
power
A long chimney is introduced in a NCBWR in order to achieve high natural circulation flow rate.
Inside the chimney of ESBWR are partitions that separate in groups of 16 fuel assemblies, and
thereby form smaller chimney sections, limiting cross flow and flow mixing. Assuming that corewide pressure equalization takes place at the upper plenum above the chimneys, the pressure drop
oscillation in the chimney is included in the characteristic equation of a super bundle (which is
defined as a group of 16 fuel assemblies in a common chimney cell) stability analysis.
The part-length fuel rods are typically installed in BWR assemblies to reduce the bundle pressure
drop and the steam flow velocity in the highly voided area. Their effect on flow stability has also
been studied by replacing the part-length rods with full length rods, while assuming the same
axial power distribution. The calculated decay ratios for part-length versus full-length fuel rods
are shown in Table 4.3.
It is clear that the part length rods have a positive effect, as they add to the single channel stability.
This is expected as the part-length rods increase the flow area in the upper channel, which
decrease flow velocity, thus the pressure drop near the exit, which in turn increase the channel
flow rate.
The decay ratio of a hot super bundle is slightly smaller than that of a hot single channel with the
same power peaking factor. This could be explained by the mixing of bypass flow and active
coolant flow, which dampens the oscillation. The insignificant frictional pressure drop in the
chimney does not affect the stability performance much. It is also found that the decay ratio of a
super bundle fluctuates in a small range with the chimney length changes. The flashing-induced
stability phenomenon is only important under low pressure conditions; therefore, its effects are
not included in this work.
- 49 -
Table 4.3: Chimney and part length rod effects (NU, HEM)
Model
Single channel (pressure equalize above
Super bundle
the core)
(pressure equalize above the
With part length rods No part length rods chimney)
ower peaking
factor
Decay Ratio
1.33
1.33
1.33
1.25
0.28
0.40
0.25
0.18
4.3.4 Model evaluation, HEM versus NHEM
To assure the suitability of HEM in a stability analysis, a comparison of HEM and NHEM has
been done for the single channel analysis. Non-uniform axial power profile is applied in each case.
To construct the NHEM characteristic equation, the pressure drop oscillations across the twophase heated region is derived first. As discussed in Section 3.4.1, the Bestion drift-flux
correlation was applied for the non-homogenous model. This correlation has the following form:
(3.11)
Co = 1.0,V~ = 0.188 gDap
V Pg
For the numerical characteristic equation derivation, this region was divided into N nodes. The
pressure drop oscillation at every node k was obtained by applying linearization, perturbation
and Laplace transformation the conservation equations discussed in Section 3.4.1, and the total
pressure drop oscillation across this region was obtained by summing up the oscillations of every
node.
From Equation (3.12), one obtains
Vfg Ph~
h 9" (k)
hfg Ac
cbj(k + 1) = 6j(k) + dz
(4.54)
The volumetric flux oscillation at the first node (z = A ) should be the same as the inlet velocity
oscillation. Therefore, 9j(1) = &ui.
From Equation (3.13), one obtains
- 50-
j(k + 1)- 2j(k) -Vg
dz
sP, (k + 1) =
z
(s-+
j(k) + Vg
SPm
(k)
Pm (k + 1) .)p,
dz
m(k)
(k) -sj,
j(k) + V,
(j(k + 1) - dj(k))
(4.55)
j(k) + V,.
The density oscillation at the first node ( z = A ) should be zero, since it should give a zero vapor
generation rate at the boiling boundary.
Perturbation and Laplace transformation of Equation (3.17), (3.18) and (3.19), yield:
om
SP
(k + 1)
= j(k +1)+
gum (k +-1)
(4.56)
P, (k + 1)
1hm (k +-1) =
vfg p, (k
+ 1)
(4.57)
Then, the pressure drop oscillation at each node k can be obtained from Equation (3.14). As the
acceleration part of the momentum equation is only related to the inlet and outlet conditions of
the region, it is treated separately.
SAp(k) = G3Um (k + 1) + (SP, (k)dz + Pm (k)(um (k + 1) - um (k)) - G +- f 2Gdz)um
De
+ (um (k)(um (k + 1) - umrn (k)) +
f 2u (k)dz + gdz)SP, (k)
(k)
(4.58)
2De
For the acceleration part,
APa
Pf -PM
+8zZaccPm - Pg
of Pg V2)d
Pm
Pf - Pm(L) ppg
SPm(L)
f -Pm(L) pfpg
2
Pm(L) P P P(L)Vp
2
(4.59)
Pm (L) V
It is easy to perturb and Laplace transform the above equation to obtain the total acceleration
pressure drop oscillation as:
Apacc =
Pm (L) - 2p
3p(L)
Pmo(L)
PfP pgVSPm (L)
(4.60)
-51 -
The nodalization is from A to L, but the real case should be from 2 + 152 to L. The pressure
drop oscillation due to boiling boundary oscillation should be deleted from the total oscillation.
The pressure drop oscillation due to boundary oscillation can be expressed as:
6Aps
=(G
u
Uin+Vgi
g Ph q"(2)+ f 2pfU /(2De) + gpf)62
hfg Ac
(4.61)
Then, the total pressure drop oscillation in the heated two-phase region can be expressed as:
N2
SAP 2 =1 8p(k) + SApacc - 8Apa
5
(4.62)
k=1
Thus, F2 (s), the transfer functions between an inlet flow oscillation and the pressure drop
oscillations in this region could be obtained as
F2 (S) =
SAP 2
(4.63)
A
Suin
Adding up all the pressure drop oscillation in each region, the NHEM characteristic equation of
the single-channel ESBWR is derived, and the stability analysis results compared with HEM are
shown in Table 4.4. If we set the drift velocity V, = 0.0, the characteristic equation, derived for
NHEM will become that for the HEM.
Table 4.4: Results of HEM and NHEM model in single channel analysis
Model
HEM
NHEM
-1.07+5.27i
-1.39 + 5.65i
Decay Ratio
0.28
0.21
Frequency (Hz)
0.84
0.90
Dominant Root
As shown in Table 4.4, the decay ratio of the HEM is slightly higher than that of NHEM.
According to Podowski [2003], the HEM predictions are always more conservative compared to
those of a mechanistic two-fluid model over a broad range of operation conditions, which is
consistent with our findings. This result is expected, since for the same mass flow rate and
heating power, HEM predicts a lower vapor velocity and higher void fraction than those obtained
from a slip or two-fluid model.
- 52-
4.4 Ledinegg Stability Analysis
The Ledinegg type instability, also called as flow excursion, is a static type of instability since
this kind of instability phenomenon is governed by static hydraulic laws. In the Ledinegg type
instability, flow undergoes sudden, large amplitude excursion to a new, stable operating condition.
This is due to the particular S-shape relation of the flow rate to the pressure drop, characteristic of
a boiling channel often exhibits at low pressure. The NCBWR should be designed without
Ledinegg instability problem.
The typical relationship of fluid pressure drop across a boiling channel to inlet flow velocity (or
inlet flow rate) is shown in Fig. 4.11 (marked APcha,,ne). For parallel channels as in the NCBWR
core, the constant pressure drop boundary condition can be taken as APexternal .
Ap
Apchannel
-
I
o
I
-
-
I
APexternali
Region 2I
Region 3
1~U'V
Uin
Fig. 4.11: Ledinegg instability (flow excursion)
As shown in Fig. 4.11, if the operating point is in region 2, such as at operating point 2, a small
increase of inlet flow will decrease the channel pressure drop below the constant external pressure
drop. Thus, the inlet flow will increase again, until the operation shifts to point 3. On the other
hand, a decrease in the flow of point 2 will shift the system to point 1. Thus, the operation in
region 2 is unstable.
- 53 -
The criterion for the occurrence of a Ledinegg type instability is [Boure, 1973]:
aGint
(4.64)
aGepxt
As, in the ESBWR, the friction pressure loss in the downcomer is negligible, the external pressure
drop is almost constant. Thus, to avoid the Ledinegg instability, the pressure drop across the
channel should satisfy the follow relationship:
Pchannel
0
(4.65)
auin
The relationship will be applied to the BWR channels to check for Ledinegg instability
4.4.1 Ledinegg Stability Analysis by Using Pressure Drop versus
Flow Rate Curve
The pressure drop versus inlet flow velocity of the ESBWR hot channel and the average channel
were calculated and plotted in Fig. 4.12a and Fig. 4.12b, respectively. It should be noted here that
the pressure drop APchannel includes the pressure loss in the chimney, upper plenum and the
separators.
- I Sx105
cc
0~
(-
P
cc
CL
01.
2 O1.
Co
0.
0
n(rU)
0
CO 0.,
Cl).
50
100
Percentage of Reference Flow Rate (%)
150
Percentage of Reference Flow Rate (%)
(a) Hot channel
(b) Average channel
Fig. 4.12: Pressure Drop versus Flow Rate Curves of ESBWR channels
- 54-
From Fig. 4.12, it is easy to see that the slope of the pressure drop versus flow rate at the
operating point is always positive for both the hot and the average channels. Thus, the criterion of
the Ledinegg stability described by Equation (4.65) is satisfied and there will be no Ledinegg
instability in the ESBWR design at full power operating conditions.
4.4.2 Ledinegg Stability Analysis by Using Characteristic Equation
According to Ishii [1971], the Ledinegg type stability criterion can be also expressed as:
lim
s-*O
channel
in
> 0 > liml(s) > 0
(4.66)
s--O
In which case, the perturbation of inlet velocity can be expressed as:
Uin = Eet
(4.67)
Where, e is an arbitrarily constant number and s is a complex number (s = a + jCO, where a
is the amplification coefficient and wCis the frequency of oscillation). Thus, by taking the limit
s - 0 , the perturbation becomes constant. Thus inequality (4.66) becomes the same as
inequality (4.65).
As the characteristic equation H(s) has already been constructed in the DWO analysis, it can be
used to assess the Ledinegg instability.
For the previously defined hot channel in the ESBWR design:
limHl(s) = 1.02e5 kg/rrs >0
s--0
(4.68)
Similarly, at an average channel:
limHF(s) = 9.21e4 kg/rss>0
(4.69)
s-4-0
- 55 -
Thus, there will be no Ledinegg type static instability in the ESBWR design at steady-state
operation conditions. This finding is the same as the results from the pressure drop versus flow
rate map.
4.5 Conclusion
For the Ledinegg type instability, it is found that the reference ESBWR design would not
experience such an instability problem at normal operating conditions. In single-channel DWO
stability analysis, it is found that the flow oscillation decay ratio for a typical NCBWR is higher
than that of a typical BWR at rated conditions. Although the NCBWR design data show a lower
radial power peaking factor and a higher inlet orifice coefficient than those of an older BWR,
which tend to enhance stability. However, its high power to flow ratio reduces its stability margin
slightly. Furthermore, the results indicate that new design features of the NCBWR, including
shorter fuel bundle and installation of part-length rods, tend to improve its thermal-hydraulic
stability performance.
A sensitivity analysis to axial power distribution was conducted. It is found that the stability
margin is reduced when power is shifted to the bottom of the core, which confirms the findings in
the literature. The bottom peaked power distribution increases the two-phase flow region and core
average void fraction, which degrades the stability. Thus, the most limiting condition for single
channel thermal-hydraulic stability is at Beginning of Cycle (BOC), which has the most bottom
peaked power shape.
Sensitivity studies have addressed the effects of inlet orifice coefficient, the channel power and
flow rate. It is found that the NCBWR stability is most sensitive to the inlet orifice coefficient. A
proper choice of the orifice scheme is needed to balance the stability performance and natural
circulation performance. The NCBWR is also sensitive to the power and flow rate. With
decreasing flow rate or increasing power, the NCBWR stability gradually deteriorates due to the
increasing power/flow ratio. It can be concluded that the NCBWR and BWR stabilities are
similarly sensitive to the analyzed operating parameters.
-56-
Chapter 5
Coupled neutronic regionwide (out-of-phase) stability analysis
Out of phase oscillations in boiling water reactors (BWR) have been observed in some reactors
during stability tests and also during start up conditions, such as in Leibstadt, Cofrentes [Mata et
al. 1992], Caorso [Gialdi et al. 1985], and Ringhals [Van der Hagen et al. 1994]. This kind of
instabilities is characterized by out of phase self sustained oscillations in which a sizable region
of the core increases in power, while the power in other parts decreases, in such a way, that the
average reactor power remains essentially constant. In the tests described in [Gialdi et al., 1985],
local power oscillations amplitude was as large as 70% while the average reactor power oscillated
by only 12%. Since the automatic safety systems in BWRs rely on total power measurements to
scram the reactor, large amplitude out-of-phase oscillations can occur without reactor scram.
Therefore, it is necessary to design the reactors to avoid the out-of-phase instability problem.
Furthermore, for economics, next generation BWRs typically use large-size cores to produce
higher power outputs. As the core size increases, the nuclear coupling between different parts of
the core becomes weaker, and the core becomes more susceptible to out-of-phase oscillations.
Also, the high nominal power favored an increase in the reactivity feedback and a decrease in the
response time, resulting in a lower stability margin. Thus, it is even more important to assess outof-phase stability of NCBWRs, such as ESBWR, which have larger reactor cores.
Important contributions to out-of-phase instability have been made by March-Leuba and
Blakeman [1991], who showed that the subcritical modes can become unstable under certain
conditions even when the fundamental mode is stable, and by Kengo Hashimoto et al. [1993] who
showed by modal expansion that the thermal-hydraulic reactivity feedback among different
modes was one of the mechanisms leading to out of phase oscillations. Hashimoto et al. [1993]
and Takeuchi et al. [1994] also examined the stability of subcritical neutronic modes which could
result in out-of-phase oscillations, and showed that the subcriticality of the spatial-harmonic
mode could be employed as an indication of stability.
-57-
In this chapter, the out-of-phase stability features of the ESBWR and BWR/Peach Bottom 2 are
analyzed. The linearized thermal-hydraulics model and point kinetics model were developed. To
obtain the first subcritical neutronic dynamic mode, the modal expansion method for point
kinetics equation based on the so-called A modes was applied. In the analysis, the effects of nonuniform power distribution and equivalent core diameter are analyzed; the sensitivities of
ESBWR stability to different operating parameters and reactivity coefficients are assessed and
compared to BWR at both rated and natural circulation conditions.
5.1 The model description
In this section, the thermal-hydraulic and neutronic models are developed first; then, they are
coupled together and the characteristic equation is constructed for the out-of-phase stability mode.
The thermal-hydraulic and neutronic models are illustrated in Fig. 5.1.
First subcritical mode neutronic
dynamics model
-W
Upper Plenum
T,out
|
AP
I -
II
Fig. 5.1: An illustration of out-of-phase stability model
-58-
WT,in = const.
As seen in Fig. 5.1, the core model includes two channels with one channel to represent each half
of the core.
5.1.1 Thermal-hydraulic model description
To investigate the coupled neutronic stability, a thermal hydraulic model must be developed for
the whole core. To represent the ESBWR core flow and power by a few channels, the detailed
flow and power distributions should be obtained. Using the TRAC/BF1 code, Akitoshi Hotta, et
al. [2001] analyzed the thermal-hydraulic lumping effect on the BWR out-of-phase stability, and
found that the stability is not sensitive to the number of lumped channels. Using the stability code
SAB, Zhao et al. [2005] also achieved the same conclusion, provided there are at least three zones
in each region of the modeled core: the hottest channel, the hot subregion and the low power
subregion.
As indicated in [Zhao et al., 2005], for BWRs, the out-of-phase oscillation is sensitive to the
reactivity feedback coefficient; since the neutronic feedback is controlled by the whole core
average properties, and the core thermal hydraulic lumping approach will not change the core
average properties, the BWR out-of-phase stability is not sensitive to the degree of core channel
lumping. Moreover, the BWR only applies two inlet orifice zones, center and peripheral regions,
different core lumping schemes do not change the inlet orifice coefficients of the different lumped
channels. However, Zhao et al did not evaluate the ramification of using a point kinetics model
instead of a space-time kinetics model.
As the BWR out-of-phase stability is not sensitive to channel lumping, a three channel model to
represent one half of the core is applied to conduct out-of-phase stability analysis. But for
simplicity, one channel model is used to describe the mechanism of out-of-phase instability. In
this mode of lumping, the whole core is represented by two identical channels, with each channel
representing half of the core.
During out-of-phase density wave oscillations, the input variables for a specific channel are: the
inlet flow rate, inlet enthalpy and power. Therefore, output pressure drop oscillations across
channel 1 or 2 can be described as a function of the inlet flow rate oscillation, inlet enthalpy
oscillation and power oscillation. Assuming that the enthalpy in the lower plenum can be taken
-59-
constant during the out-of-phase oscillation, the pressure drop oscillations are only functions of
the inlet flow rate and power oscillations:
'
(5.1)
SAp 2 = r25w2 + g28'2
(5.2)
SApI = 1 Sw, + ;rlgq
Solving the Sw1 and Sw2 from the above equations (5-1) and (5-2), and applying the boundary
condition:
(5.3)
SAp = SAp 2
The inlet flow response for an input pressure drop oscillation or power oscillation for channel 1
and 2 can be expressed as:
Sw =1
SAp -
LSq
1
i"
r2
r2
Sw2 = Sp
2
(5.4)
(5.5)
9
For this two parallel channel system, if the pressure drop or power oscillated in one channel, say
channel 1, to maintain the total flow rate constant, the flow rate in the other channel would have
the same amount of oscillation feedback but with an opposite sign. The feedback process can be
illustrated as:
Sw, =0
Fig. 5.2: Block diagram of the pressure feedback mechanism for parallel channels
From Fig. 5.2,
Vw2,F =
F2
FApF
2
F2
(5.6)
2
- 60-
and,
Sw, + SW2,F
=
(5.7)
0
Therefore,
1
1(
1p_
gq + SApp,
Ap, F1
I
1
Adding the
SAp,
2
q
5
(5.8)
=0
F2
' 2
term to both sides of the above equation and applying:
r2
(5.9)
SApF + SApext = gApt
Equation (5.8) can be re-written as:
r
1
F1
-SApt,
-
1
2
Sql
92 + S1Apt,
F1
F2
F2
9
11
6 Pext
F2
(5.10)
Also, during the out-of-phase oscillations, the power has the relation: Sqi;'
-5=
1
Substituting Equation (5.1) into Equation (5.10) above, and after some rearrangement, one
obtains:
+
F,9w,+ Kt•q,•' r,1 +r
F2
1
+ I+K
& +
9'=
(F 92 1,ext +
F2
F2
,ext)
o-aG
(5.11)
This equation will be applied to construct the characteristic equation after coupling with the
neutronic feedback relations. The coefficients F , F2 and ,rz, r2 can be obtained from the
single channel pressure response analysis, which had been described previously in the single
channel stability analysis.
Using the same methodology described above, similar equations to (5.11) could be derived for the
three channel model case (half of the core). Once the transfer functions from inlet flow rate and
power oscillations to pressure drop oscillation were developed for a specific single channel, the
out-of-phase thermal hydraulic characteristic equation can be easily obtained after some
mathematic derivations.
-61 -
5.1.2 Neutronic model description
The neutron kinetics equations describe the rate of change in the neutron flux throughout the core.
Since the neutron flux level determines the amount of heat generation inside the fuel pellet as a
result of fission, it is directly related to the volumetric heat generation rate in the heat conduction
equation.
A Point Kinetic Model (PKM) was described in Section 3.4.3, and it will be used to simulate the
void-reactivity coupling in this analysis. However, during an out-of-phase instability, the high
harmonic neutron spacial distribution modes are excited even if the fundamental mode is stable.
To obtain the dynamic features of the high harmonic modes, a modal expansion method is widely
used. The basic idea of the modal expansion method is to approximate the unknown space and
time related neutron flux function by a linear combination of known space functions with timedepended coefficients. Therefore, the modal expansion method includes two steps: (1) define the
space functions (2) derive the time-dependent coefficients.
In the out-of-phase stability analysis literature, the 2 modes modal expansion is frequently
applied, such as: [Munoz-Cobo, et. al., 1996, 2000, 2002], [Hashimoto, et. al., 1993, 1997],
[Dokhane, et. al., 2003], and [Zhao, et al., 2005]. The A modes expansion method is also used in
this analysis.
The Lamda modes expansion model can be expressed as:
1
L,,, (r, E) = -Mom
(r, E)
(5.12)
In which,
LO: the steady-state destruction operator,
M *: the steady-state production operator,
A2 : m t mode reactivity
,,: mth neutron flux mode
For a bare homogenous cylindrical reactor with radius R and height H, it can be shown that the
fundamental and first subcritical modes can be described as:
0o(r,
z, 0) = Jo (2.40r/ R) sin(z / H)
- 62 -
0l (r, z, 9)
= J 1(3.83r/R)sin(nz / H) sin(0)
(5.13)
The shapes of these two modes are illustrated in Fig. 5.3.
Fundamental mode
First subcritical mode
Fig. 5.3: Shapes of the fundamental and first subcritical modes
During out-of-phase oscillations, the excited first subcritical mode coupled to a stable
fundamental mode generates an out-of-phase dynamics feature. The total neutron flux is the
combination of these two dominant neutron flux modes and can be illustrated as:
-k
U
Fig. 5.4: Total neutron flux dynamics during out-of-phase oscillation
- 63 -
The adjoint equations of OM can be described as:
oT
*
L•"m(r, E) =
1
T (r, E)
*Om
MO
(5.14)
And the bm together with its adjoint eigenvectors Om have the relation:
< q,M
k
>= 0, for m # k
(5.15)
Using the A modal expansion method, the modal point kinetic equation can be obtained.
Neglecting the non-linear terms and tiny parts, the simplified equations are listed below. Details
can be found in [Zhao et al., 2005].
dnm _ Pm -fl nm + Pmo_+
dt
dCim
dt
Am
Am
6Cim,
(5.16)
i=l
Pi
= n -- ZCi,m
(5.17)
Am
Where,
pm": the subcritical reactivity of the mth mode, which can be defined as:
p, = 1-1/A m
(5.18)
p,,: the excitation reactivity of the mt mode, which is introduced by a net change in the nh
mode reaction rate. It can be described as:
pro =< 0,,(SM( - &L)0>
/
< OM, MoM
>
(5.19)
Am: the neutron generation time of the mht mode, which can be described as:
Am = < b,1/V m > / <
,Mob
m
>
(5.20)
The subcritical reactivity pm can be calculated using the formula derived by [March-Leuba and
Blakeman, 1991]:
pm = DVB2 I v Z f
(5.21)
Where,
D: diffusion coefficient
- 64 -
if : fission cross section
v : number of neutrons per fission
VB 2 :the geometric buckling difference between the fundamental and m th mode
Applying Perturbation and Laplace transformations to the above equations, the so called zeropower transfer function of the m th harmonic mode can be derived:
9q =Dm(s)POmo
(5.22)
(Im (s) = qO (sA, - p +
(5.23)
/'A
A•
i=1 S +
5.1.3 Coupling of the thermal-hydraulic and neutronic models
During out-of-phase oscillations, the thermal-hydraulic parameters change (changes in the
average void and the fuel temperature) would have neutronic feedback. In this case, it is
necessary to consider the reactivity loss due to the moderator density change via the average core
void fraction and the average fuel temperature changes.
The void-reactivity and the fuel temperature-reactivity are two important reactivities that link the
thermal-hydraulics and the neutronics. Generally, they are specified with reactivity coefficients
which show the change in the reactivity due to change in the feedback parameter, either the void
fraction or the fuel temperature.
Therefore, the following coefficients are defined for the neutronic feedback reactivities,
Ka =
1a
and KD =
p
Here, a is the void fraction which is properly averaged over the
aTp
reactor core; Tp is the fuel pellet temperature which is properly averaged over the fuel pellet
volume throughout the core. Based on the definitions of the reactivity coefficients, the reactivity
due to each feedback loop can be determined. The feedback mechanism can be described as
shown in Fig. 5.5.
- 65 -
Pext
cUext
Fig. 5.5: Thermal-hydraulic and neutronic coupling of the out-of-phase stability
If only the first subcritical harmonic mode was excited, from Fig.5.5, the following relations can
be obtained:
&i"= 9&
+ &,
(5.24)
&q~ = ~,(s)Sp,
(5.25)
Therefore,
(5.26)
Also, the reactivity has the relation:
Sp, = 8 Pext + Sp,F
(5.27)
sPF = pfenl + sPopo
(5.28)
From Equation (5.19), the feedback reactivity can be described as:
Spn =< I,( - 6L)O > / <0,Mo¢m >
(5.29)
If only the fundamental and first subcritical modes were interested, Equation (5.29) become:
F =<
SpF
= p 10Y~,V'I
, (&1 - &)0
>
(5PF
LJI > / < [, Mo0
,
- 66-
(5.30)
It is worth noticing that the oscillation operator (6M1 - SL) has an anti-symmetrical distribution
similar to the first-harmonic neutronic mode during the out-of-phase oscillation. Imagining that
the flow rate in one half of the core increases, the coolant density will increase and the fuel
temperature will decrease in that half of the core, which will give a positive (64 - 6L) during
the out-of-phase oscillation. Also, the first-harmonic neutronic mode has a positive sign in this
half of the core. Therefore, the oscillation operator (6M - oL) and the first-harmonic neutronic
mode have the same sign in this half of the core, which will generate a positive reactivity
feedback value from Equation (5.30). On the other hand, in the other half of the core, both the
oscillation operator (6M- 6L) and the first-harmonic neutronic mode have negative signs,
which also generate a positive reactivity feedback value from Equation (5.30). Adding up the
feedback reactivity for the two halves of the core, the total feedback reactivity can be obtained.
Using the two channel model (each channel represent one half of the reactor core), the reactivity
feedback is derived in [Zhao et al., 2005]. The results are shown below:
Cdop
&pF = Cden Pl,c
(5.31)
,f
Where,
N
r1,c: the average density oscillation in channel 1 (half of the core), P,c =
WnS6PI',
(5.32)
n=1
N
,if
: the average fuel temperature oscillation in channel 1, 6i,f = ZW,,•,t
(5.33)
n=1
W, is the weighting factor at each node, which is usually taken in the form [Wulff et al., 1984]:
2
(5.34)
Wn =
n=l
For the density and fuel temperature oscillations in the node n, let us express each to be a function
of the inlet flow rate oscillation and power oscillation as:
3
+
den 91
(5.35)
f = U Swl + nJ
5q1
(5.36)
Pic = Ul,den6l
Substituting the above two equations into Equations (5.32) and (5.33), one obtains:
- 67-
N
l,c=
N
WnU,den + S
6WnQ
1
=•
W
n=1
+ Q1,den&l
(5.37)
I,f&tl
(5.38)
n=1
N
l,f
den = U ,den
Lq'
n=1
N
n,•f
+
-
lk
.W,,Q• = Ul,fS
1+
n=1
Substituting the above two equations into Equation (5.31), one can obtain:
,c+ Cdop 6 ,f
pF = Cden
+ CdopU,i)
1,den,,
=(C
l +(CdenQ,den +Cdop,f)
(C, +(5.39)
(5.39)
Thus, substituting the above Equation (5.39) into Equation (5.27), one obtains:
Ap, -
Cden(U
+ Uf)
I - Cdop(,de
J
n+
= 8 Pext
(5.40)
5.1.4 Characteristic equation for coupled neutronics out-of-phase
stability
To construct the characteristic equation for the coupled neutronics out-of-phase oscillation, the
one channel model (half of the core) was also applied here for demonstration.
In Section 5.1.1, the characteristic equation governing the thermal hydraulics dynamics was
derived as Equation (5.11),
.
F8w1 +
,q
-
+
F2
2
1+ +
(."
2
qo=
+~
F2
2
(
1
1Z2 +
Iex,)
(5.11)
In Section 5.1.2, the neutronic dynamics model was constructed and the transfer function from
the reactivity oscillation to power oscillation was derived as Equations (5.22) and (5.23).
Therefore, we come up with the power and reactivity relation as Equation (5.41):
(5.41)
qt" --I)l(s)&p, = 6!2t,
Noting that &q = Sqo and for a nuclear reactor system Sqex = 0.
In Section 5.1.3, the thermal hydraulics and neutronics model are coupled, the coupling equation
of (5.40) was derived.
- 68 -
9p, - Cden (Ui,den + U,f )•
- Cdop (Q1,den+
Q,f
(5.40)
)9' = Pext
The above stability governing Equations (5.11), (5.41) and (5.40) can be written in matrix form
as:
A(s)6x, = B(s)dx'ex
(5.42)
Where,
dxt = (9w ' !•" p)
Sxext = ('I,ext
A(s) =
(5.43)
Pext)
65,xt
Ft
it,
O
0
1
- A (s)
(denQ1,den +Cdop,)
1
- (Cden U,d n
B(s) =
(5.44)
CdopU,f )
0
1
0
0
0
1
(5.45)
(5.46)
Therefore, the characteristic equation for the out-of-phase stability of a BWR system can be
derived from,
det[A(s)] = 0
(5.47)
Thus, the characteristic equation is:
F,[1 -
(s) (CdenQl,den + Cdop,
f)] + ~t()
(CdenUl,den +
CdopUf )
=0
(5.48)
For a more detailed lumping, the same procedure can be used except that the result has more
complicated properties combinations. Also, the characteristic equations similar to Equation (5.48)
can be derived.
5.2 Out-of-phase Stability performance of ESB WR
comparisons with BWR
and
GE uses a stability criteria map of core decay ratio vs. channel decay ratio to establish margins to
stability [GE Nuclear Energy, 2005]. Stability acceptance criteria for BWRs are established on
- 69-
this map at core decay ratio = 0.8 and limiting channel decay ratio = 0.8, with an allowance for
regional mode oscillations in the top right corner of the defined rectangle. The ESBWR stability
design criteria are shown in this map in Fig. 5.6(Figure 4D-1 in [GE Nuclear Energy, 2005]).
e
'3
0
0.1
02
0.3
0.5
0.4
channe
0.6
Decay Rno
0.7
0.8
0.9
1
Fig. 5.6 Proposed Stability Map for ESBWR
The ESBWR core size of 1132 bundles is significantly larger than the operating BWR. The
regional stability boundary is expected to move inwards in the Core Decay Ratio vs. Channel
Decay Ratio plane as the sub-criticality of the azimuthal harmonic decreases. As shown in the
above stability map, line A represents the regional stability boundary of the smaller BWR
reactors; while line B represents that of the ESBWR. The shrinking of the regional stability
boundary, from line A to line B, shows the approximate effect of the larger core size on the
regional oscillations. As described in the single channel stability analysis, the acceptance criteria
for the single channel decay ratio was constrained to less than 0.5 in order to account for regional
stability of the ESBWR. Considering model uncertainties of the order of 0.2, we can adopt the
- 70 -
acceptance criterion of the decay ratio = 0.8 for ESBWR out-of-phase (regional) oscillations, the
same as GE did for the core decay ratio and channel decay ratio in the stability map. For
conservative concern, HEM is applied in the thermal-hydraulic model.
In this section, the decay ratio for out-of-phase (regional) oscillations was calculated by
perturbing the core in the out-of-phase mode about the line of symmetry for the azimuthal and
harmonic mode: perturbing the inlet flow rate and heat generation in half of the core while
maintaining the total core power constant. The initial operating conditions are the same as for the
single channel stability analysis. Non-uniform axial power profile at BOC is used and the effect
of axial power distribution is also analyzed. Then, like in the single channel stability case, the
sensitivity of ESBWR stability to different parameters is assessed and compared to BWR (Peach
Bottom 2) at both rated and natural circulation conditions.
5.2.1 Thermal-Hydraulic Lumping and Reactivity Coefficients
As discussed in Section 5.1.1., the BWR out-of-phase stability is not sensitive to the degree of
channel lumping, a three channel model (high power channel, intermediate power channel, and
low power channel, together represent one half of the core) is sufficient to conduct out-of-phase
stability analysis. The detailed lumping parameters for the ESBWR are listed in Table 5-1. They
are calculated based on:
(1) The same pressure drop across all of the channels;
(2) Radial power distribution is assigned based on the reference design value at BOC
(Beginning of Cycle);
(3) All assemblies in the peripheral region are grouped into the low power channel;
(4) Keeping constant the total core power and total flow rate.
Table 5-1: Parameters of the three lumped channel model for ESBWR (half of the core)
Lumped channel
Power
Assembly
Assembly flow
Equivalent inlet orifice
number
peaking factor
number
rate (kg/s)
coefficient
(half core)
1
1.25
64
7.26
42.1
2
1.05
410
7.80
42.1
3
0.603
92
6.75
110
-71 -
The typical BWR was also lumped into three channels for each half of the core, and the lumped
parameters can be found in Table 5-2.
Table 5-2: Parameters of the three channel model for a typical BWR (half of the core)
Lumped channel
Power
Assembly
Assembly flow
Equivalent inlet orifice
number
peaking factor
number
rate (kg/s)
coefficient
1
1.3
30
13.85
31.1
2
1.037
306
14.41
31.1
3
0.565
46
7.65
205.0
In Section 5.1.3, the void reactivity coefficients and Doppler coefficients are shown to couple the
thermal-hydraulics and the neutronics. Usually, a neutronic code is required to determine those
coefficients for the ESBWR and BWR fuel bundles under different operating conditions.
However, for simplicity, the ESBWR is assumed to have the same reactivity coefficients as a
typical BWR; and the following reactivity coefficients are used in the current study. The validity
of this assumption for the shorter and wider core is suspect, but no other information was
available for us to use.
1)Void coefficient, a quadratic form [Munoz-Cobo et al., 2002] was taken as:
C, = C 1 + C2- + C3'7 2 ,
(5.49)
Where, a is the core average void fraction: a =
-f
- PM
Pfg
,,: the core average water density
2) A constant Doppler coefficient was taken for both ESBWR and BWR.
In effect, the Doppler coefficient induces negative reactivity feedback with short delay time. Thus,
it is expected to stabilize the core. Due to the smaller pin of an ESBWR assembly, the
stabilization effect is stronger. However, the magnitude may be very small compared to void
reactivity, and can be ignored in many cases [Lahey and Moody, 1993]. So, it is reasonable to
apply a constant Doppler feedback coefficient to both the ESBWR and BWR in this analysis.
- 72-
As to the void reactivity coefficient, it mainly depends upon fuel design parameters such as H/U
ratio (ratio between moderator and fuel atom densities), U-235 enrichment, and fuel burnup. A
more negative void reactivity coefficient increases neutronics feedback directly and destabilizes
the core. As the fuel to moderator ratio in the design of ESBWR is comparable to that of a typical
BWR, it is reasonable to use the same form for both of them. Note that the higher value of the
void in the coolant in the upper region of the core is compensated for by the larger inter-assembly
gap in the ESBWR compared to the BWR.
However, it is difficult to decide on the appropriate values for C 1, C 2 , and C 3 in the above
Equation (5.49) for a typical BWR. The values for Ringhals NPP can be found as: C, = -0.143,
C 2 = 0.12005, C 3 = -0.1755 in [Munoz-Cobo et al., 2002]. Because the Ringhals NPP has a
similar core size as the typical BWR/Peach Bottom 2, and the fuel enrichments of these two
power plants are similar[Zhao et al., 2005], the values of factors C1, C 2, C3 were taken as those
of the Ringhals NPP in this work.
Table 5.3: Reactivity coefficients for ESBWR and BWR
Reactor
Doppler coefficient
Void coefficient (quadratic form)
BWR
Ak
-2.3e-5( •-/"C)
k
Ak
-0.124 A(
k
ESBWR
Ak
-2.3e-5( k--/C)
k
-0.137-
Ak
k
= 0.448)
(A = 0.626)
From Table 5.3, it is seen that both the BWR and ESBWR have similar void coefficients while
the average void fraction of ESBWR is higher than that of BWR. This indicates that using the
same factors C, C2, C3 for both the BWR and ESBWR may not be appropriate. This assumption
need to be examined in future work. A sensitivity analysis of the impact of reactivity coefficients
on out-of-phase stability is conducted later in this chapter.
5.2.2 Stability performance under design conditions
An out-of-phase stability analysis for the ESBWR design is conducted in this section. For
comparison, the typical BWR out-of-phase stability was also analyzed.
- 73 -
The lumped channel parameters are collected in the Table 5.1 and 5.2, and the design parameters
and the calculated decay ratios are listed in Table 5.4 for both the ESBWR and BWR. Uniform
axial power shape is applied in the BWR at both rated and natural circulation conditions. This
assumption will be released later in the parameter sensitivity analysis. Compared with the
parameters of the reference BWR at rated conditions, the following design parameters will affect
the out-of-phase stability for the NCBWR:
*Higher power to flow rate ratio (reduces stability)
*Larger reactor core (reduces stability)
*Low thermal-hydraulic stability margin (favorite out-of-phase oscillation, reduces stability)
From Table 5.4, we can see that the NCBWR has a higher decay ratio, i.e. smaller stability
margin compared to a typical BWR. But it is still stable, with a large stability margin. The decay
ratio of the BWR at natural circulation condition is higher than that of the ESBWR, which
indicates that the enhanced ESBWR thermal-hydraulic stability margin, as discussed in Chapter 4,
also improves its out-of-phase stability performance.
Table 5.4: Parameters for out-of-phase stability analysis
BWR/4 (Peach Bottom
BWR/4 at natural
2) at rated condition
circulation condition*
Core Power (MW)
3293
1986
4500
Core flow rate (kg/s)
12915
4118
9516
50
30
54
Uniform
Uniform
Design value at BOC
31.1 central, 205.0
31.1 central, 205.0
42.1 central, 110
peripheral
peripheral
peripheral
Fuel bundles, number
764
764
1132
Equivalent core diameter (m)
4.75
4.75
5.883
-1.24 + 3.52i
-0.17 + 2.16i
-0.74 + 4.93i
Decay Ratio
0.11
0.60
0.39
Frequency(Hz)
0.56
0.34
0.78
Parameter
Power density (kW/L)
Axial power shape
Inlet orifice coefficient
Calculated dominant root
*: maximum natural circulation point in BWR/4 power-flow map
- 74 -
NCBWR (ESBWR)
5.2.3 Parameter sensitivity analysis
In this section, a design feature and operating parameter sensitivity study is conducted for both
the ESBWR and BWR.
(1) Axial vower trofile effects
As
in
the
single
channel
stability
analysis,
the
general
power
shape
function:
P(z) = A, sin(fr(z / H) 1 " ) is used in the sensitivity analysis for out-of-phase stability. By
changing the power shape factor n, the effect of power distributions can be determined. The
ESBWR decay ratios calculated for different axial power distributions are shown in Fig. 5.7.
0.7
E
0.6
0.5
DR of Non-uniform power distribution at B
0.4
0.3
0.2
DR of Uniform power distribution
1
1.2
1.4
1.6
1.8
2
2.2
2.4
2.8
3
Power Shape Parameter, n
Fig. 5.7 Effects of axial power profile on stability
As seen in Fig. 5.7, a bottom peaked power distribution has a larger decay ratio. It is clear that a
bottom peaked power distribution causes boiling to occur earlier; this brings an increase of the
axially averaged void fraction and also produces a larger delay in the local (e.g. at spacer grid
locations) pressure drops adjustments, hence making the reactor less stable.
To compare the stability performance of the BWR to that of the ESBWR, a similar axial power
distribution should be applied in the sensitivity analysis. It is shown in Fig. 5.7 that the ESBWR
- 75 -
decay ratio of the power distribution at BOC is close to that when the power shape parameter n
equals to 2, since they have similar shapes. Thus, the general power shape function:
P(z) =
2
sin((z / H) / 2) is used in the BWR sensitivity analysis for out-of-phase stability.
The decay ratios calculated under design conditions are listed in Table 5.5, and will be used as the
base cases for parameter sensitivity analyses. Comparing the results of Table 5.4 and Table 5.5, it
is seen again that the bottom peaked power distribution has a smaller stability margin.
Table 5.5: Base case for sensitivity analysis of out-of-phase stability (NU)
Parameters
BWR at rated condition
BWR at natural
ESBWR at rated
circulation condition*
condition
Core Power (MW)
3293
1986
4500
Core flow rate (kg/s)
12915
4033
9516
-1.30 + 4.86i
-0.14 + 2.94i
-0.74 + 4.93i
Decay Ratio
0.19
0.74
0.39
Frequency(Hz)
0.77
0.47
0.78
Calculated dominant root
*: maximum natural circulation point in BWR/4 power-flow map
(2) Inlet orifice coefficient effects
Pressure drops in the single phase region are directly related to thermal-hydraulic feedbacks
under DWOs. As in ESBWR, the pressure loss at the inlet orifice dominates the single phase
pressure drop. Thus, it is important to assess the impact of inlet orifice coefficients on out-ofphase stability. The inlet orifice coefficient sensitivity analysis was performed by multiplying the
coefficients at each channel with the same factors, while keeping the other operating parameters
unchanged. The decay ratios and core mass flow rates at different inlet orifice coefficients are
shown in Fig. 5.8.
-76-
I
-eI
0.8
o
S0.6
_ --
-- - -
-
4Vuuu
BWR
12000
--0 BWR at N.C.
------_
T - -
rinnn
I
ESBWR
- -
- - -
-
- -
0•
0
.
.
.
.
.
--
.
.
0
0
"
- ---------
-----
,0.0.5..
0.5
1.5
1
--
.
I
i
--------- ----------
0.2---------- T+-
.
10000
-
, 8000 - -
, 0.4--------
.
-
-4
?. .
1.5
~
6000
-------
4000
-
a
.
ESBWR
BWR at Rated Condition
--
BWR at N.C.
- - - - - - --
-
--
4
0.5
0
0.5
1
1
1.5
Inlet orifice coefficient (Ratio to design value)
Inlet orifice coefficient (Ratio to design value)
(b) Core Flow Rate
(a) Decay Ratio
Fig. 5.8 Inlet orifice coefficient sensitivity analysis
From Fig. 5.8, it is seen that the decay ratios of ESBWR and BWR increase significantly for
smaller inlet orifice coefficient. A minimum factor of 0.5 to the ESBWR design value of inlet
orifice coefficient is required to satisfy the stability criterion, of a decay ratio below 0.8. The
impact of inlet orifice coefficient on stability is remarkable under both forced circulation and
natural circulation conditions, as the decay ratio increases from 0.19 to 0.51 for BWR at rated
condition, versus, from 0.39 to 0.93 for ESBWR under natural circulation conditions. It is not
surprising that the decay ratio of the BWR at natural circulation condition is higher than one
when the inlet orifice coefficients are reduced to half of the design values. This is consistent with
the historical findings of some experiments and analyses that indicated that BWRs are susceptible
to unstable oscillations around the knee in the power-to-flow curve.
It is also shown in Fig. 5.8b that decreasing the inlet orifice coefficient will decrease the pressure
loss across the orifice, thus increase the core flow rate to balance the total pressure drop under
natural circulation. As the increase of core flow rate has a stabilizing effect on stability, the effect
of inlet orifice coefficient is damped a little under natural circulation conditions. It is shown in
Fig. 5.8b that the effect of inlet orifice coefficient on core flow rate is more significant in
ESBWR, compared to BWRs. This is probably due to the pressure loss at the inlet orifice
accounting for a higher proportion of single-phase pressure drop in ESBWR.
(3) Power effects
The power sensitivity analysis was performed by changing the system power while keeping other
operating parameters unchanged. The decay ratios and core mass flow rates at different power
levels are shown in Fig. 5.9.
- 77 -
x
104
----
ESBWR
BWR at Rated Condition
1.5 --- BWR at N.C.I.
0r
a3
oL 0.5
0
o 0.5
---B
100
90
0
Core Power (%)
120
110
Core Power (%)
130
(b) Core Flow Rate
(a) Decay Ratio
Fig. 5.9: Power sensitivity analysis
From Fig. 5.9, it is observed that the decay ratios of the ESBWR and BWR increase
proportionally to increasing power. The higher core power increases the average void fraction and
has a higher neutronic feedback gain because of the increased void reactivity coefficient. Under
this condition, the two phase pressure drop increases and stability margins decrease. The results
are consistent with the general understanding that the reactor is more stable at a smaller power-toflow ratio. It is also seen that the ESBWR still satisfies the stability criterion at 130% nominal
power.
From these results, the core power effect is more significant for the ESBWR, compared to the
BWR under forced circulation conditions, but similar at natural circulation conditions. This is
probably because: (1) the core flow rate is more sensitive in the ESBWR, as seen in Fig. 5.9b. (
the larger reactor leads to more sensitive stability margin for out-of-phase oscillations.
(4) Flow Rate effects
Since the flow rate is uncontrolled under natural circulation conditions in the ESBWR, the mass
flow sensitivity analysis was conducted only for the BWR under forced circulation conditions. It
is performed by changing the mass flow rate while keeping the power and other operating
parameters constant. The decay ratios at different core flow rates are shown in Fig. 5.10.
-78-
Ar
o0
'M
°u
CO
0r
0•
100
90
80
Fraction of nominal flow (%)
.70
110
Fig. 5.10: Flow Rate sensitivity analysis
It is shown in Fig. 5.10 that the decay ratio increases proportionally to decreasing core flow rate.
Lower flow rates result in higher average void fraction and longer delay times for the density
waves. Thus the operating conditions with lower flow would be less stable.
(5) Doppler coefficients effects
As discussed in Section 5.2.1, the Doppler feedback effect on the BWR stability is usually small
compared with the void coefficient effect. In our analysis, a constant Doppler feedback
coefficient is applied for both the ESBWR and BWR. To examine the validity of this assumption,
a variety of Doppler coefficients were examined. The results are shown in Fig 5.11.
As seen in Fig. 5.11, both the ESBWR and BWR are not sensitive to the Doppler coefficients.
Therefore, the assumption of applying a constant Doppler feedback coefficient in out-of-phase
stability analysis for both the ESBWR and BWR is reasonable.
- 79-
1
-- ESBWR
• BWR at Rated Condition
I
------ -- BWR at N.C.
0.8
A
A--$-
'v
v4'--
0.6 ----o--...
---
0.4
0.2
7
~(
4
-
-------
)
I
~----~--~
1
2
3
Doppler Coefficients (factors)
Fig. 5.11: Doppler coefficients sensitivity analysis
(6) Void coefficients effects
The void coefficient sensitivity analysis was performed by multiplying a factor by the steady state
values of both the ESBWR and BWR. The decay ratios for different factors are shown in Fig.
5.12.
--- ESBWR
nA
BWR
A-
M
l
r%+
-AIM
h.i t.
- --
-------,------I-------------- ----
13L
-----
I
6.5
1
1.5
Void Coefficients (factors)
Fig. 5.12: Void coefficients sensitivity analysis
It is clear that the void coefficient effect is prominent in both the ESBWR and BWR cases.
- 80-
(7) Core Diameter effects
In out-of-phase oscillations, the first subcritical neutronic mode will take effect. The higher mode
subcritical reactivity is directly proportional to the difference between the geometric buckling of
the fundamental and subcritical modes. Therefore, larger cores should be more susceptible to out
of phase instabilities than smaller cores. As the ESBWR uses large-size core to compensate for its
shorter fuel and produce higher power outputs, it is valuable to conduct a sensitivity analysis to
the core equivalent diameter. It is performed by changing the core equivalent diameter while
keeping other operating parameters constant. The results are shown in Fig. 5.13.
f~
0.5
I-
-.•00.45
i
r
I
i
ESBWR
Design Value
I
0.4
-
-
-
--
-
-
-
-
-
-
-
---
0.35
0.3
A
-
2-
-
- -- - - - -- - -
-
-
-
I
5
4.5
6
5.5
5
Core Equivalent Diameter (m)
6.5
Fig.5.13: Equivalent Core Diameter sensitivity analysis
From Fig. 5.13, it is shown that the decay ratios increase proportionally to the core equivalent
diameters. As the core size increases, the nuclear coupling between different parts of the core
becomes weaker, and the core becomes more susceptible to out-of-phase oscillations.
5.3 Conclusion
In the out-of-phase stability analysis, it is found that the decay ratio for a typical NCBWR
(ESBWR) is much higher than that of a typical BWR (Peach Bottom 2) at rated conditions. This
is due to the larger reactor core and lower thermal-hydraulic stability margin. However, the decay
-81 -
ratio of the ESBWR is smaller than that of BWR/Peach Bottom 2 under natural circulation
conditions, which indicates that the new design features of the ESBWR, as discussed in Chapter 4,
tend to improve its thermal-hydraulic stability performance, and thus out-of-phase stability
performance.
Sensitivity studies have addressed the effects of axial power distribution, inlet orifice coefficient,
operating power level, and core flow rate. The results are similar to those of the single channel
analysis, as the out-of-phase oscillations are dominated by thermal-hydraulic stability
characteristics. The effects of axial power distribution, inlet orifice coefficient and power are
more complex under natural circulation conditions, as any change of those parameters would alter
the core flow rate. However, the results are consistent with the general understanding that a
higher power-to-flow ratio and a higher two-phase pressure drop over single-phase pressure drop
ratio result in higher average void fraction and deteriorate both the thermal-hydraulic and out-ofphase stability margin. It can be concluded that the NCBWR and BWR stabilities are similarly
sensitive to operating parameters, but the NCBWR has more margin for stability under natural
circulation conditions.
Sensitivity analyses to reactivity coefficients have also been conducted. The results indicate that
the void coefficient effect is prominent in both ESBWR and BWRs, while the Doppler feedback
is negligible in out-of-phase stability analysis.
The values used in our analyses of the two
coefficients are very generic. Detailed calculation of void coefficients is required for more
accurate stability analysis. The current results should only be considered as reasonable first order
estimates, but not as confirmed values
The effect of core size equivalent diameter again indicates the importance of assessing the outof-phase stability analysis for large BWRs, such as ESBWR, in which the nuclear coupling
between different parts of the core becomes weaker.
- 82-
Chapter 6
Coupled neutronic core
wide (in-phase) stability analysis
Core-wide oscillations have been observed in several forced circulation BWRs [D'Auria et al.,
1997] under close-to-natural circulation conditions where the stability margin is lowest in the
power/flow map. For instance, core-wide oscillations were observed at the LaSalle 2 plant in
Illinois. The term "core-wide oscillations" refers to the case when oscillations of neutron flux
and flow in the whole core are in phase.
The boiling two-phase flow in the core may become less stable because of the time lag between
accommodating a mass flow change at one location and through adjustments of mass flow of a
different density at another location in a channel, or through adjustments of vapor generation.
Furthermore, void-reactivity feedback may make the system less stable. These two issues are of
practical importance for designing and operating BWRs. As the NCBWRs typically have higher
power-to-flow ratio, larger average void fraction and void reactivity coefficients, it is of
considerable importance to assess the in-phase (core-wide) stability performance of NCBWRs.
Furthermore, the stability characteristics will be discussed based on a parametric study of design
choices of ESBWR, such as the power profile, total operating power, inlet orifice coefficients, the
void reactivity coefficients, etc. Again, all the parameter sensitivity study will be compared with
BWR at rated and natural circulation conditions.
6.1 The model description
In in-phase oscillations, the flow and the power in all channels oscillate in the same mode
throughout the whole core. Only the fundamental neutronic mode has effects. In this section, the
thermal-hydraulic and neutronic models are described first; then, they are coupled together and
the characteristic equation is constructed for the in-phase stability mode. The thermal-hydraulic
and neutronic models can be illustrated in the Fig. 6.1.
- 83 -
Fundamental mode
neutronic dynamics
Wfeedwater
Fig. 6.1: Illustration of in-phase stability model
Unlike the single channel oscillation mode, which is restricted by a constant pressure drop across
the single oscillation channel, the core pressure drop during the core wide in-phase oscillation
will fluctuate, and the magnitude is constrained by the out-of-core components. Also, unlike the
region wide out-of-phase oscillation, which adjusts the flow between two halves of the core to
maintain an almost constant total inlet flow rate, the core inlet flow rate will oscillate during the
in phase oscillation, and the feedback of the inlet flow rate is conducted by the flow dynamics in
the out-of-core components. Furthermore, the in-phase stability mode affects all components in
the flow path, while both the single channel and the out-of-phase stability modes only involve the
parallel channel system in the core. The reactor core is just one of the components in the flow
path, and the entire flow path is involved in the in-phase core-wide oscillations.
For a typical BWR system, the two phase mixture exits from the reactor core and flows through
the upper plenum and riser, then the steam is separated from the two phase mixture in the steam
separator and dryer region. The separated saturated water mixes with the feedwater and flows
- 84-
down through the downcomer. After flowing through the jet pumps and recirculation loops, the
water is finally collected in the lower plenum and flows up through the core to finish the closed
flow loop. The boundary condition of this closed loop is the total of pressure drops for all the
components in the flow path is zero. A constant feedwater flow rate can be assumed, since the
feedwater flow rate is not affected by the loop fluctuation and is a small fraction of the total flow
(about 13% at the steady state). A typical BWR reactor flow path is illustrated in Fig. 6.2. (Fig
3.3 in [Hanggi, 2001])
ss
Fig. 6.2: BWR coolant flow path illustration
The flow path of the GE ESBWR design is illustrated in Fig. 2.1 in Chapter 2. The ESBWR
design relies completely on natural circulation to remove the heat from the core. The recirculation
loop is eliminated. The same as in a BWR, the boundary condition is again the total of pressure
drops across all components in the flow loop which adds up to zero.
6.1.1 Thermal-hydraulics model description
To investigate the in-phase stability, a thermal hydraulic model must be developed for the whole
core. As discussed in Chapter 5, coupled neutronics stability is not sensitive to the different
thermal-hydraulic channel lumping. It is due to: (1)the neutronic feedback is controlled by the
-85-
whole core average properties, and the different thermal hydraulic channel lumping approach will
not change the core average properties a lot; (
BWR only applies two inlet orifice zones, the
center and peripheral regions, different core lumping schemes do not change the inlet orifice
coefficients of the different lumped channels. So, a three parallel channel model to represent the
whole core is applied to conduct in-phase stability analysis. Similar to the three channel model to
represent half a core in out-of-phase stability analysis, consideration is given to a hot channel,
average channel and low power density channel.
In single channel density wave oscillations, the pressure boundary condition is that the total
pressure drop across the oscillation channel is constant. The characteristic equation for single
channel stability analysis is: HI(s) = F(s) = 0, in which F(s) is the transfer function between
the inlet flow oscillation and the total pressure drop oscillation across the channel. In the in-phase
oscillations, the pressure boundary condition is that the total pressure drop across the loop is
constant, similar to that of the single channel oscillations. However, during in-phase oscillations,
not only the inlet flow rate, but also the inlet enthalpy and power can be fluctuating. Therefore,
the output pressure drop oscillations across the loop will be described as a function of the inlet
flow rate oscillation, inlet enthalpy oscillation and power oscillation:
APloop = FloopWin
+
kq' ++ H
oopMin
(loop
(6.1)
Thus, to derive the characteristic equation for in-phase stability analysis, the pressure drop
oscillation for every component should be derived.
(1) Reactor core and chimney partition
If the core is modeled as N lumped parallel channels, for every lumped channel, the pressure drop
oscillation can be described as:
dAp = FlS
SAp
2
=F
2
1 l,in
+ TlF 1 gqo' + HoAin
W2,in + 72F 2
' + H2
in
(6.2)
SAPN = FNWN, in + NFNdq + HuN-in
- 86-
All of the lumped channels have the same pressure drop. Adding up the inlet flow rate to all
channels, the total flow rate can be obtained. If the pressure drop response to the inlet flow rate
and power oscillations for every specific lumped channel is calculated, the pressure drop response
for the total flow rate of the whole core and power oscillations can be obtained. Applying the
boundary conditions:
SApI = AP 2 ... = 8APN = SAPcore
(6.3)
Sw~1,in
(6.4)
+
2,in ... -
N,in =
in
The volumetric power of the lumped channels can be related to the core average volumetric
power as:
q, = F,q0
q2
=
F2o
(6.5)
qN = Fq'
I&j
= F•
•'q
(6.6)
After some manipulations, the pressure drop oscillation across the core can be expressed as a
function of the inlet flow rate oscillation, power oscillation and inlet enthalpy oscillation as:
SAPcore =
core
reore
in
6 q + H core
in
(6.7)
Where,
11 r1
++-I...+ 2 F
1
1
1
1
1
H core =(- + - + ---+ - ) (H - + H2
--score
-+--- -+
=
]
2
N
2
NFN
1
HN IF
N
Besides the pressure drop response should be derived, the density and fuel temperature
oscillations for every axial node should also be related to inlet flow rate, inlet enthalpy and power
- 87 -
oscillations since the reactivity feedback is related to the whole core properties. The oscillations
for enthalpy, density, fuel temperature and the flow rate at every node i can be expressed as:
•n
i
"- Wn
ni
=
-"w
n
+t"
& i.
= D, S,
p,,
q
'
W
nh
Wn,i lqo + W hi,
i
+D
q'
+ Dhi
&~hnH
=+
+H
H
' + Hh
n,i
,
in+ n ,i q o " ni
nj=
(6.8)
(6.9)
(6.10)
(6.10)
in
++ InAMh
Cnjqi
n in
The transfer functions (Wn,•
W
(6.11)
Whi, Dn, ...... ) in the above equations are derived from the
conservation equations at each node. The method is similar to that in single channel analysis,
which has been described in Chapter 4.
At the core exit (chimney partition exit for ESBWR), the water from all the lumped channels
flows into the upper plenum, and is mixed there. It was assumed that the mixing is perfect. From
the mass and energy conservations, we can get
Wm
Wlex
W2,ex
(6.12)
+ WN,ex
whm = wexhi,ex + W2,exh2,ex +
+
(6.13)
N,exhN,ex
Where,
h,: the mixed enthalpy at the upper plenum
Win: the mixed flow rate at the upper plenum
h,.ex, h2,ex ... hx,: the exit enthalpy for lumped channels
Wl,ex ,
2,ex... WN,ex
the exit flow rate for lumped channels
Perturbation and Laplace transformation of Equation (6.12) and (6.13) yield the mixed enthalpy
and flow rate oscillations:
m
,ex + 2,ex + +8wN,ex
= (WW..+W
+ (W
h
+ W
'x)
wi
+W(2x +-+ ",+W+, ) Sjqo
+whex +...+Whex)
1,ex~l
2,ex
N'+W,e-x
6hin
-88-
(6.14)
= Wex gWi, +Wqe S4l + Wex'hi,,
Shm
=
[(hi,ex,oSWI,ex + Wex,oh,ex) + (h2,ex,o
+(hN,ex,o
N,ex + WN,ex,oAN,ex)
2,ex +
2,ex,o 'h,ex) +...
hm,o06m W
-
= H~, Sw, + Hex 9q + H ,ex bh,
(6.15)
Applying the relation between the enthalpy oscillation and density oscillation described in
Chapter 4 for the two phase mixture, the mixed density oscillation at the core exit can be derived
as:
m=
(6.16)
vfg -2 •-_
From the mixed flow rate and density oscillations, the mixture velocity oscillations at the core
exit can be derived as:
Wm = mm•Acore
i',,
= (m
- win / m,o
,
(6.17)
• m)/(Acore •mo)
Where,
Acoe : total core flow area
,mo: the steady state mixed density at core exit
(2) Upper plenum
The upper plenum modeling and the oscillation derivations follow from those of [Lahey and
Moody, 1993]. Since the cross section area of the upper plenum is much larger than its height, a
lumped parameter model can be applied. The pressure drop oscillation for the upper plenum can
be derived as:
A~pup
Ap
LUA
[sAup,ex
A,
s
Ai
1
in(Au,ex
upex
]2'
A
) + -(
2 A,,Pm,o
(6.18)
(6.18)
A2
wi
)2 (1
Where,
- 89-
A
x)+9.81LuP ]b
,e
p,ex = (1+ up) -
(6.19)
up,i
(6.20)
up,ex = Ae 8up,i
n
A ,ex
A : Upper plenum flow area
•u: Volume averaged upper plenum density
z,: the mixing time constant in the upper plenum, ru, -
P
wup,o
Mup,o: the water mass in the upper plenum at the steady state
w
the water flow rate in the upper plenum at the steady state
:,o:
Recalling that the channel exit is the upper plenum inlet, plugging Equations (6.16), (6.17), (6.19)
and (6.20) into Equation (6.18), the pressure drop response of the upper plenum can be described
as:
SApup = FupWin +7CupSq + Hnup
(6.21)
kh
(3) Steam separators
The pressure loss at the steam separators is lumped into the form loss with a coefficient ofKsep.
Therefore, the steam separator pressure drop model is described as:
2
(6.22)
APsep = Ksep
Then, the pressure drop oscillation can be derived as,
2
Usep
9APsep
= Ksep 2
6 Psep + KsepGsep Usep
(6.23)
In which,
Susep(S) =f Sup (S)
Aseup
Pse (s)
=Pup,ex (s)
- 90 -
Then, the pressure drop oscillation for the steam separator can be written as:
APsep = Fsep',n + 7 sep6qo' + H sep
(6.24)
i,
(4) The feedwater and the separated saturated water mixing region
WFW, hFW
WD, hD,in
Fig. 6.3: Separated water and feedwater mixing region
As mentioned before, assuming the feedwater flow rate and enthalpy are constant, one obtains,
(h, - h,,)wFw
k,in
2
(6.25)
&VD
WD,o
Assuming non-compressible fluid in the single phase region, the flow rate oscillations in the
single phase region will be equal to the core inlet flow rate oscillation, i.e. SwD =
Win.
(5) The downcomer reeion
Without a recirculation loop, the downcomer region in the ESBWR is very simple. Assuming the
single phase density is constant in the downcomer region, the pressure drop oscillation for the
steam separator can be written as:
JAPd
fdcLd
= (IdcS +--fD
Dedc
mcoreL
cor)
fAd
=r
in
Where,
Idc : Momentum of inertia of the downcomer, Idc = Ldc / Adc
-91-
(6.26)
The enthalpy oscillation in the downcomer could be derived from the energy conservation
equation. According to [Zhao et al., 2005], the energy conservation equation for the downcomer
can be written as:
8(hD -p/p f)
(D
fA
at
wD
8h,
az
=
(6.27)
Ph,D
Where,
q,: heat flux between the downcomer water and the vessel wall. It can be written as:
(6.28)
qv = HD(TV - T).
Applying a lumped parameter model to the reactor vessel and neglecting the heat loss and
generation in the vessel wall, the temperature dynamics of the vessel wall can be written as,
dT
SC,,
(6.29)
dt = -qv AV
Where,
M, :Vessel mass
A, :Total vessel heating area at the downcomer region
Perturbation and Laplace transformation of Equation (6.28) and (6.29), neglecting the fluctuation
of heat transfer coefficient, one yields:
(ST, - TD)
(6.30)
Tv (s) = -A ,v (M C p,,
vs)
i qv
(6.31)
&qv = H
Perturbation and Laplace transformation of Equation (6.27) and applying Equations (6.30) and
(6.31), after integration and rearrangement, the relation of the enthalpy oscillations between the
inlet and the outlet of the upper downcomer can be obtained as:
&hD,e
= exp{-LD [
ADp fS +
WD,o
Ph, Ho
DHo
]}&Di
WD,oCf (1+ HD,o A I(MVC,,vs))
=D
D,n
(6.32)
However, the downcomer region of a typical BWR can be divided into an upper downcomer, a
lower downcomer and the jet pump regions, as shown in Fig. 6.4. The flow dynamics is more
complex than that in ESBWR. The details of the thermal-hydraulics oscillation in the downcomer
region of a BWR can be found in [Zhao et al., 2005].
- 92-
Part 1
Part 2
2
Part 3
F,
Fig. 6.4: The downcomer region in a BWR
Also, the pressure drop oscillation in downcomer region can be also derived as,
(6.33)
SAPD = FDiSw,
Where, F, = FD + FD2 + jet
The relation of the enthalpy oscillations between the inlet and the outlet of the upper downcomer
for BWR can be also derived as:
Diex
= DShD,in
(6) Lower plenum
Just as for the upper plenum, the lumped model was applied to the lower plenum, from which one
obtains:
hLP,ex = (1 + LpS)
-1
(6.34)
hLP,i
n
Where,
,o
Wio:
the
water
mass
in
the
lower
plenum
at
steady
state
rTI: the mixing time constant in the lower plenum, r, - M
M
o:
the water mass in the lower plenum at steady state
- 93 -
Recalling that the downcomer outlet is the lower plenum inlet, and the lower plenum outlet is the
core inlet, from equations (6.25), (6.32), and (6.34), one obtains a relation between the core inlet
flow rate oscillation and the core inlet enthalpy oscillation as:
6~i = (1+ z~s)-I x exp{-L
(h x - hFw)WFW
2
i%
,
=
ADf S
PhDHDo
Wo,o
WD,opf (1+ HD,oAV I(M,C,V s))
(6.35)
(6.35)
nin
Thw.
D,o
(7) Total pressure drop oscillations across the flow loop
Plugging Equation (6.35) into Equations (6.7), (6.21), and (6.24), one obtains,
5APcore = (Fcore + H
coreThw )•wn +
AP, = (Fup + HpT,Thw)Wi +
(6.36)
corel6q
(6.37)
up•q0 '
(6.38)
Apsep = (Fsep + HsepThw)~Win + gsep q7
0
The total loop pressure drop responses can be obtained by adding up Equations (6.36), (6.37),
(6.38), and (6.26).
SAp
= [(core +
up
+
sep +
(H or + H
) ) + (H
+ H sep )Thw ]&in+ (7core+ Jup + Irs )q&o'
(6.39)
= rloop6,in + lToop¢•o
The flow path can be categorized into a compressible part and non-compressible part. The
compressible part for the ESBWR is the two-phase flow region, which includes the two-phase
flow part in the reactor core, upper plenum, riser and steam separator. The non-compressible part
includes the downcomer, lower plenum and the single phase part of the reactor core. During inphase oscillation, the pressure drop fluctuation in the compressible part will generate an opposite
sign feedback in the non-compressible part with the same amplitude to maintain a constant
pressure drop boundary condition. The feedback mechanism can be represented in Fig. 6.5 as
follows:
- 94-
Get',,Sq
+
6w, tq
Thermal hydraulics of
S the compressible part
APcomp.
SAp, =0
&Sw
Thermal hydraulics of the
non-compressible part
Pnon-comp.
+
Fig. 6.5: Thermal hydraulic feedback of the ESBWR in phase stability
From the above diagram, the pressure drop oscillations in the compressible and non-compressible
part can be expressed as:
8Apco
= F.comp.• + comp.•
APnon-comp. = Fnon-comp.
(6.40)
F + )7non-comp. oqo
(6.41)
To maintain a constant total pressure drop,
(6.42)
SAPcomp. + APnon-comp. = 0
Combining Equations (6.40), (6.41) and (6.42), one obtains,
Floop
in,t
+ oop
(6.43)
in,ext
= non-comp.~
6.1.2 Neutronic model descriptions
The neutronic dynamics transfer function had been discussed in Chapter 5 by using a A modes
expansion of the point kinetic equation. However, only fundamental mode neutronic dynamics
play a role in in-phase oscillations; unlike in out-of-phase oscillations, both fundamental and first
subcritical modes take effects. According to Equations (5.22) and (5.23), the transfer function for
the fundamental mode can be described as:
SqF = (o(s)SP,
(6.44)
~o(s) = q'(sAo +
(6.45)
i=1 S
+ Ai
- 95 -
6.1.3 Characteristic equation for in-phase stability analysis
Similar to the out-of-phase case, for the in-phase stability mode, the void-reactivity and the fuel
temperature-reactivity are two important feedback mechanisms that link the thermal-hydraulics
and the neutronics. For in-phase stability analysis, the boundary condition of the constant total
pressure drop oscillation throughout of the whole closed loop (Ap,,oo
p
= 0 ) is applied.
Similar to the out-of-phase case, the feedback loop for the in-phase stability can be described in
Fig. 6.6.
(5 ext
U ext
Fig. 6.6: Block diagram for the in-phase stability model
The same as the out-of-phase case, the neutronic feedback is controlled by the whole core average
properties. The oscillations of the core average parameters are obtained by adding up the
weighted contributions for all of the nodes, radial and axially through out of the core. If the core
has N channels and one channel has M nodes axially, the average core density and fuel
temperature oscillations can be expressed as:
NM
NM
ic=
W U
in Wj
j=l i=1
N
M
S in
j=1 i=1
WUi
den
+q
W
i=1
Q
= UdendWin
den
den
en
(6.46)
j=l i=1
+ Sq '
N
M
W QYi = U, w, +
j=1 i=1
Therefore, the reactivity feedback oscillation can be obtained as:
- 96 -
Q fq
(6.47)
Sp, = Cden
c+
dop
(6.48)
= (CdenUden + CdopUf )w in + (CdenQden + CdopQf
Then, the total reactivity oscillation equation can be written as:
Sp,
)
- Cden (Uden + Uf
in,t - Cdop (Qden+
(6.49)
Qf )qo = Pext
And the total power oscillation equation can be expressed as:
(6.50)
qtl - Do (s)S)p, = 9qe'
Similar to the out-of-phase stability analysis, the governing Equations (6.43), (6.49) and (6.50)
can be described in a matrix form as:
(6.51)
A(s)&x, = B(s)&ext
In which,
(6.52)
Xt = (6Win,t q o, SPt ),
SXext = (SWin,ext ,, &ext,
(6.53)
Pex, )
Floop
1
0
A(s) =
-(CdeUn + Cdop U)
]non-comp.
B(s) =
nloop
-(CdenQden + Cdo, Q
0
- ~o(s
) , and
(6.54)
1
00
0
1 0
0
0 1
(6.55)
Therefore, the characteristic equation can be derived from det[A(s)] = 0. The characteristic
equation for the in-phase stability analysis is:
Froop[1- o(S) (CdenQden + Cdop
)f +
o(S) (CdenUdn + CdopUf) = 0
(6.56)
6.2 In-phase Stability performance of ESBWR and comparisons
with BWR
As described in Chapter 5, GE uses a stability criteria map of the in-phase core decay ratio vs.
channel decay ratio to establish margins to stability [GE Nuclear Energy, 2005]. The ESBWR
- 97 -
stability design criterion for in-phase decay ratio is constrained to less than 0.8. We also adopt
this criterion in our work for the uncertainty of the analysis method. For conservation, HEM is
again applied in the thermal-hydraulic model.
In this section, the decay ratio for in-phase (core-wide) oscillations was calculated first at
ESBWR design coditions. The initial conditions were the same as for the out-of-phase stability
analysis. Non-uniform axial power profile at BOC is used and the effect of axial power
distribution is also analyzed. Then, as in the single channel and out-of-phase stability cases, the
sensitivity of ESBWR stability to different parameters are assessed and compared to BWR (Peach
Bottom 2) at both rated and natural circulation conditions.
6.2.1 Stability performance under design conditions
An in-phase stability analysis for the ESBWR design is conducted in this section. For comparison,
the typical BWR in-phase stability was also analyzed.
The whole ESBWR core is represented by three lumped channels (high power channel,
intermediate power channel, and low power channel). The detailed thermal-hydraulic lumping
parameters for ESBWR and BWR/Peach Bottom 2 are listed in the tables below.
Table 6.1: Parameters of the three lumped channel model for ESBWR
Lumped
Power
Assembly
Assembly flow
Equivalent inlet
channel number
peaking factor
number
rate (kg/s)
orifice coefficient
1
1.25
128
7.26
42.1
2
1.05
820
7.80
42.1
3
0.603
184
6.75
110
Table 6.2: Parameters of the three channel model for a typical BWR
Lumped
Power
Assembly
Assembly flow
Equivalent inlet
channel number
peaking factor
number
rate (kg/s)
orifice coefficient
1
1.3
60
13.85
31.1
2
1.037
612
14.41
31.1
3
0.565
92
7.65
205.0
- 98 -
The operating parameters and the calculated decay ratios are listed in Table 6.3 for both the
ESBWR and BWR. From Table 6.3, we can see that the ESBWR has a higher decay ratio, i.e.
smaller stability margin compared to a typical BWR at rated condition. But it is still stable, with a
large stability margin. However, it is found that the BWR at the maximum natural circulation
point can be unstable, as the calculated maximum decay ratio is larger than 1. As discussed in
Chapter 4, the decay ratio in single channel analysis for BWR at maximum natural circulation
point is 0.72, versus 0.28 for ESBWR. Therefore, the thermal-hydraulic stability margin is much
lower than that of ESBWR. When neutronic feedback is taking effects in in-phase stability
analysis, the system could experience sustained or amplified oscillations.
This finding is
consistent with the reported BWR instability events near natural circulation conditions.
Table 6.3: Parameters for in-phase stability analysis
BWR/4 (Peach Bottom 2)
BWR/4 at natural
NCBWR
at rated condition
circulation condition*
(ESBWR)
3293
1986
4500
12915
3834
9516
Feed water flow rate
(kg/s)
1687
1018
2451
Power density (kW/L)
50
30
54
Uniform
Uniform
Design value at
Parameter
Core Power (MW)
Core coolant flow rate
kg/s)
xial power shape
BOC
Inlet temperature (oC)
275
275
271
Fuel bundles, number
764
764
1132
Calculated dominant
oot
-0.98 + 4.34i
0.06+2.28i
-0.44 + 4.40i
0.24
>1, Unstable
0.535
Decay Ratio
0.36
0.69
lrequency(Hz)
*: maximum natural circulation point in BWR/4 power-flow map
0.70
6.2.2 Parameter sensitivity analysis
In the following, design feature and parameter sensitivity study is conducted for both the ESBWR
and BWR at rated condition.
- 99-
(1) Axial power profile effects
As the same in the single-channel and out-of-phase stability analysis, the general power shape
function: P(z) = A, sin(r(z / H)""
)
is used in the sensitivity analysis for in-phase stability. By
changing the power shape factor n, the effect of power distributions can be determined. The
decay ratios calculated for different axial power distributions are shown in Fig. 6.7.
As seen in Fig. 6.7, a bottom peaked power distribution has a larger decay ratio, the result is
consistent with those in single channel and out-of-phase stability analysis: the bottom peaked
power distribution causes boiling to occur earlier; brings to an increase of the axially averaged
void fraction and produces a larger delay in the local pressure drops adjustments, hence making
the reactor less stable. However, the effect is not as prominent as in single channel analysis. The
saturation effect is also shown in the above figure. Under bottom-peaked power shapes, shifting
power to the core bottom also reduce the neutronics feedback in the upper, high void fraction
content region of the core, which has a stabilizing effect.
1.5
2
2.5
Power Shape Parameter, n
Fig. 6.7 Effects of axial power profile on in-phase stability
-100-
For consistency, the general power shape function: P(z) =
2
sin((z / H)"1/2 ) is again applied
in the BWR sensitivity analysis for in -phase stability, the same as used in the single-channel and
out-of-phase stability analyses. The decay ratios calculated are listed in Table 6.4, and will be
used as the base cases for parameter sensitivity analyses. Comparing the results of Table 6.3 and
Table 6.4, it is seen again that the bottom peaked power distribution has a smaller stability margin.
Table 6.4: Base case for sensitivity analysis of in-phase stability (NU)
Parameters
BWR at rated condition ESBWR at rated condition
Core Power (MW)
3293
4500
Core flow rate (kg/s)
12915
9516
-0.81 + 4.49i
-0.44 + 4.40i
Decay Ratio
0.32
0.535
Frequency(Hz)
0.71
0.70
Calculated dominant root
(2) Inlet orifice coefficient effects
The inlet orifice coefficient sensitivity analysis was performed by multiplying a factor to the
design values for all the lumping channels, while keeping other operating parameters unchanged.
The decay ratios and core mass flow rates at different inlet orifice coefficients are shown in Fig.
6.8.
o 0.6
- ESBWR
BWR at Rated Condition
-- --
0.7
-----------
"•
I
I
IVVVV
000
61
---
-E-ESBWR
'
14,000
I----------
BWR at Rated Condition
E
na
>, 0.5 ----------
,•---_-------
--------
CU
a4)
o 0.4
-------------
-
----
-
--
-
-
L ----i--_
------
-----------------S-
L
I
•-•
•,•--_ _
L
---
--
--
-------
10,000
-
0.3
12,000
-
- - - •;•
8,000
A'
v.,0
I
0.5
1
Inlet orifice coefficient (Ratio to Design Value)
1.5
0
I
I
0.5
I
1
1.5
Inlet orifice coefficient (Ratio to design value)
(a) Decay Ratio
(b) Core Flow Rate
Fig. 6.8 Inlet orifice coefficient sensitivity analysis
- 101 -
In ESBWR, the pressure loss at the inlet orifice takes up a large proportion of the total pressure
drop. With small inlet orifice coefficient, the core flow rate increases under natural circulation, as
seen in Fig. 6.8b. The increase in core flow rate will decrease the average void fraction and
generate positive neutronic feedback, which has a stabilizing effect. Although the smaller inlet
orifice coefficient decreases the single phase pressure drop, which deteriorates the thermalhydraulic stability margin, the overall effect in our study shows that the ESBWR in-phase
stability is not sensitive to inlet orifice coefficients. Nonetheless, it is shown in Fig. 6.8a that the
effect of inlet orifice coefficient is significant in in-phase stability for BWR under forced
circulation conditions, as expected.
(3)
Power and flow rate effects
A power sensitivity analysis was performed by changing the system power while keeping all
other operating parameters unchanged. The decay ratios and core mass flow rates at different
power levels are shown in Fig. 6.9. The mass flow sensitivity analysis was conducted only for
BWR, since the flow rate of ESBWR is uncontrolled under natural circulation conditions. It was
performed by changing the mass flow rate while keeping the power and other operating
parameters constant. The decay ratios at different core flow rates are shown in Fig. 6.10.
16,000 '-----;;:====E=S=B::!:W==R====~=====;l
-----B- ESBWR
-;:,.- BWR at Rated Condition
1
1
0.6
I
----
1
-1- -
-
-
-1- -
I
1
I
1
I
I
-
-
-
~ 0.5 - - - - ~ - - - - ~ - - - - ~ - - - - -: - - - - -:- - - - 1
1
0.4 - - - -
1
1
1
1
I
f
~ - - ~=-~-i::---=--=---::--=-~=·.=·~_··=·:==-=-:::·-'::·-=-
_--
0.3 - - - -
1
1
I
1
1
1
t ---- +- - - - ~ - - - - -: - - - - -:- - - - I
1
1
1
I
1
1
1
I
I
105
110
115
120
Core Power (%)
125
~ 14,000
:
C
~
~ 12,000
o
u:::
~
o 10,000
BWR at Rated Condition
1'-----,------,-------'
- - - - - - I - - - - - -
I - - - - - -
- -
1
1
~
~
~
I
______
-1- - - - -
1
I
1
..
1
L-
I
I
1
f
I
1
1
I
I
1
1
I
1
I
1
1
1
- - - - - - I - - - - - - -1- - - - - - -
()
_
r - - - - - f
8,00~0
130
(a) Decay Ratio
100
110
120
Core Power (%)
(b) Core Flow Rate
Fig. 6.9: Power sensitivity analysis
- 102-
130
0
0
CO
rD
0.
80
70
90
100
Percentage to nominal flow (%)
110
Fig. 6.10: Flow Rate sensitivity analysis
From Fig. 6.9, it is observed that the decay ratios of the ESBWR and BWR both increase when
reactors are operating at higher core power levels. The results are consistent with the findings in
single-channel and out-of-phase analysis. The higher core power increases average void fraction
and has a higher neutronic feedback gain, hence destabilizes the reactor. It is also seen that the
ESBWR still satisfies the criterion at 130% nominal power.
Also from Fig. 6.9, the core power effect is similarly significant under natural circulation
conditions and forced circulation conditions, although the core flow rate in ESBWR decreases
under higher power, as seen in Fig. 6.9b. However, the flow rate effect is prominent in the BWR.
As shown in Fig. 6.10, the decay ratios increase proportionally to decreasing core flow rates. In
principle, the operating conditions with the lower flow should be less stable, as it results in higher
average void fraction and longer delay times for the density waves.
(4) Reactivity coefficients effects
In our analysis, a constant Doppler feedback coefficient and a quadratic form void reactivity
coefficient ( C = C1 + C2
T+
C3 d2 ) were applied for both the ESBWR and BWR. They are
both borrowed from [Munoz-Cobo, 2002] for Ringhals nuclear plant in Sweden, which is a rough
assumption for our analysis. Without detailed neutronics model to calculate those coefficients, the
sensitivity study for those coefficients must be conducted.
- 103 -
The Doppler and void coefficients sensitivity analyses were performed by multiplying a factor to
the steady-state values of both ESBWR and BWR. The decay ratios of different factors are shown
in Fig. 6.11 and Fig. 6.12.
· a8
· v.1
·
-- ESBWR
0.7
-----
-
----
0.6
I
BWR at Rated Condition
-
-
-
S0.5
-----0.4 -------- -
--------------------------- ----- -I-----------------
- -
iI
-
-
-
-
-
-
-
-
-
I-
0.3'
v. I
3
2
1
Doppler Coefficients (factors)
Fig. 6.11: Doppler coefficients sensitivity analysis
-
0.8
ESBWR
BWR at Rated Condition
S-----
0.6----
--
- - -- -- - -- -- - - - - -
------------
-------
- - - -
----
--
-
-----I-
0
0.4S---
~J-----
0.2
0.5
I
I
1
1.5
Void Coefficients (factors)
Fig. 6.12: Void coefficients sensitivity analysis
As seen in Fig. 6.11, both the ESBWR and BWR are not sensitive to the Doppler coefficients.
The Doppler feedback effect is very small in in-phase stability analysis for both the ESBWR and
-104-
BWR. However, the void coefficient effect is prominent, although not so remarkable in the
ESBWR. The difference between the BWR and ESBWR may originate from their difference in
thermal-hydraulic stability margin.
(5) Fuel Gap Conductance effects
Fuel gap conductance also affects reactor stability performance, primarily, relating to neutronics
feedback. It should be mentioned here that the gap thermal conductivity used in our analysis is a
constant value for both BWR and ESBWR. Although affecting the thermal response of the fuel
rods, it is known with a poor degree of accuracy. To assess its effect, sensitivity analysis was
performed by multiplying a factor to the constant value. The results of different factors are shown
in Fig. 6.13.
I SI
---e ESBWR
* BWR at Rated Condition
0.8 --------------------------
I
-
--
o
,Z L
A l
CO)
- -- -- --
-- -- A -- ___-------~----------- -- --- --- -- - - - -----i
S0.4
0.2
0.5
Z --------- --- --- --- --- *-- --- ------------I
I-
I
1
1.5
Fuel Gap Conductance (factors)
2
Fig. 6.13: Gap conductance sensitivity analysis
From Fig. 6.13, it is observed that the decay ratios of the ESBWR and BWR both increase with
increasing pellet-clad gap conductance. Before the power can feed back through the coolant
dynamics, it has to change the fuel temperature, thus the heat flux from fuel to coolant. The
relatively lower fuel response in commercial BWRs would have a stabilizing effect. Thus,
increased pellet-clad gap conductance has a destabilizing effect in general, as do smaller diameter
fuels due to the reduction of the response time. However, its effect to in-phase stability is not
prominent.
-105-
6.3 Conclusion
In core-wide in-phase stability analysis, the decay ratio for a typical NCBWR (ESBWR) is found
to be higher than that of a typical BWR (Peach Bottom 2) at rated conditions, due to its lower
thermal-hydraulic stability margin and higher neutronic feedback. But the NCBWR (ESBWR)
still satisfies the stability criteria, Decay Ratio=0.8. However, it is found that BWR/Peach Bottom
2 could be unstable near the maximum natural circulation point in power-flow map. This
indicates that the new design features of ESBWR, which help the thermal-hydraulic stability
performance in Chapter 4, improve the in-phase stability performance.
Sensitivity studies have addressed the effects of axial power distribution, inlet orifice coefficient,
power and flow rate, reactivity coefficients, and gap conductance. The results are consistent with
general understandings: lower thermal-hydraulic stability margin, higher neutronic feedback, and
faster response (higher oscillation frequency) destabilize the reactor system. When a certain
operating parameter changes, all three effects should be combined, which makes the in-phase
stability more complex to analyze. In general, more bottom-peaked axial power profile and higher
power-to-flow ratio result in higher two-phase pressure drop and higher average void fraction and
higher neutronic feedback, thus deteriorate the stability margin. The higher reactivity coefficients
and higher gap conductance will result in higher neutronic feedback and shorter response time,
thus lower stability margin.
-106-
Chapter 7
Summary and Recommendations
7.1 Summary of Conclusions
Natural circulation is a key feature in the design of next generation BWRs, because it has the
potential for simplicity, inherent safety, and maintenance reduction. Numerous design
modifications have been applied in NCBWRs, such as the ESBWR, to achieve simplicity and
improved plant economics. However, the modifications changed the core stability behavior to a
significant extent, resulting in a lower stability margin when the reactor is operated at low mass
flow and high nominal power.
The objective of this thesis is to assess the stability margin of NCBWRs under normal operating
conditions, such as the ESBWR, in comparison to the older BWR technology that allows natural
convection at partial load only.
Since the frequency domain methods can be used more
efficiently to carry out sensitivity analyses, as compared to the time domain methods, a frequency
domain linear stability code was developed to investigate the NCBWR stability.
In linear stability analysis, the BWR core and reactor vessel are divided into a large number of
nodes. Thus, the thermal-hydraulic conservation equations, constitutive equations, along with
neutronic equations form a system of nonlinear equations, which can be solved numerically by
dividing the flow channel into axial computational nodes. First, the steady state parameters in
each node, including the coolant temperature, enthalpy, velocity, density, flow quality, cladding
and fuel temperature, are solved. Then, after applying perturbation, linearization and Laplace
transformation of the conservation equations for each node, the characteristic equation for each
DWO mode can be derived by applying appropriate boundary conditions.
In addition, in order to evaluate the NCBWR stability performance, comparisons with
BWR/Peach Bottom 2 at both the rated condition and maximum natural circulation condition
-107-
have been conducted as well. Sensitivity studies are performed to investigate the effects of
design features and operating parameters, including the chimney length, inlet orifice coefficient,
power, flow rate, and axial power distribution, reactivity coefficients, fuel pellet-clad gap
conductance.
Using pressure drop versus flow rate curve and the characteristic equation for single-channel
DWO stability analysis, the Ledinegg type instability has been assessed for the highest power
channel in the ESBWR. It can be concluded that the reference ESBWR design would not
experience such an instability problem in normal operating conditions.
Using frequency domain methods, the three types of DWO stability characteristics of the
NCBWR and their sensitivity to the operating parameters and design features have been analyzed.
1. Single channel stability analysis
In single channel DWO stability analysis, it is assumed that only one channel or a small fraction
of the core flow oscillates while the bulk flow remains at steady state. Therefore, the neutronic
feedback due to this small fraction oscillation can be neglected; the boundary condition of
constant channel pressure drop can be used to construct the characteristic equation.
It is found that the flow oscillation decay ratio for the ESBWR is higher than that of a typical
BWR at rated conditions, which means that the stability margin is reduced due to its high powerto-flow ratio. However, the decay ratio is much lower than that of the BWR at maximum natural
circulation conditions, which indicates that new design features of the ESBWR, including shorter
fuel bundle and installation of part-length rods, tend to improve its thermal-hydraulic stability
performance.
Various sensitivity analyses have been conducted. It is found that the bottom peaked power
distribution increases the two-phase flow region and core average void fraction, thus degrades the
stability. Therefore, the most limiting condition for single channel thermal-hydraulic stability is at
Beginning of Cycle, which has the most bottom peaked power shape. Stability margin is also
sensitive to the inlet orifice coefficient, power and flow rate. With decreasing flow rate or
increasing power, the ESBWR stability gradually deteriorates due to the increasing power/flow
ratio. When the inlet coefficient is increased, the stability margin is increased due to the increase
-108-
in single-phase pressure drop. Thus, a proper choice of the orifice scheme is needed to balance
the stability performance and natural circulation performance. However, it can be concluded that
the thermal-hydraulic stabilities of both ESBWR and BWR are similarly sensitive to these
operating parameters.
To assure the suitability of HEM in a stability analysis, a comparison of the HEM and NHEM has
been done for the single channel analysis. It is found that HEM predicts more conservative results
comparing to the non-homogenous model.
2. Out-of-phase stability analysis
During the out-of-phase instability, half of the core increases in power while the power in the
other half decrease while maintaining an approximately constant total core power. It is assumed
that the total inlet core flow-rate and total core power remain constant in the oscillations. The
thermodynamic parameter changes (changes in the average void and the fuel temperature) will
have neutronic feedback due to Doppler and void reactivity feedback. The thermal-hydraulic
HEM model and modal expansion method for point kinetics equations were applied in our linear
stability analysis code.
It is found that the decay ratio for ESBWR is much higher than that of the BWR/Peach Bottom 2
at rated conditions, due to the larger reactor core and lower thermal-hydraulic stability margin.
However, the stability margin of ESBWR is smaller than that of BWR/Peach Bottom 2 under
natural circulation conditions, which indicates that the new design features of the ESBWR
improve its thermal-hydraulic stability performance, and thus out-of-phase stability performance.
Sensitivity studies have addressed the effects of axial power distribution, inlet orifice coefficient,
power, and core flow rate. The results are similar to those of single channel analysis, which
indicates that the out-of-phase oscillations are dominated by thermal-hydraulic stability
characteristics. The higher power-to-flow ratio and higher two-phase pressure drop over singlephase pressure drop ratio result in higher average void fraction and deteriorates both the thermalhydraulic and out-of-phase stability margin. Although the core flow rate changes with the
operating parameters under natural circulation conditions, it can be concluded that the NCBWR
and BWR out-of-phase stabilities are similarly sensitive to these operating parameters.
-109-
The void coefficient effect is prominent in both ESBWR and BWRs, while Doppler feedback is
negligible in out-of-phase stability analysis. The effect of core size equivalent diameter again
demonstrates that the larger core is more susceptible to out-of-phase instabilities than the smaller
core. The out-of-phase stability performance plays an important role in designing higher power
BWRs.
3. In-phase stability analysis
During in-phase oscillations, the flow and the power in all of the channels oscillate in phase
throughout the whole core; only the fundamental mode is taken into account in the neutronics
model. The boundary condition for in-phase stability analysis is the total of pressure drops across
the flow loop is zero. For conservative, the thermally-hydraulic HEM is applied in the stability
analysis code.
From the results, the decay ratio for a typical NCBWR (ESBWR) is higher than that of a typical
BWR (Peach Bottom 2) at rated conditions, due to its lower thermal-hydraulic stability margin
and higher neutronic feedback. But it still satisfies the stability criteria, Decay Ratio=0.8.
However, it is found that BWR/Peach Bottom 2 is unstable at the maximum natural circulation
point in the power-flow map.
Sensitivity studies have also addressed the effects of axial power distribution, inlet orifice
coefficient, power and flow rate, reactivity coefficients, and gap conductance. The results are
consistent with general understandings: lower thermal-hydraulic stability margin, higher
neutronic feedback, and faster response (higher oscillation frequency) destabilize the reactor
system. When a certain operating parameter changes, all three effects must be combined, which
makes the in-phase stability more complex to analyze. In general, more bottom-peaked axial
power profile and higher power-to-flow ratio result in higher two-phase pressure drop and higher
average void fraction and higher neutronic feedback, thus deteriorate the stability margin. The
higher reactivity coefficients and higher gap conductance will result in higher neutronic feedback
and shorter response time, thus lower the stability margin.
-110-
7.2 Recommendations for Future work
The following topics are good candidates for future work:
1. A more quantitative validation of the code.
2. The effect of oscillation frequency to the stability margin, its relation to the operating
parameters, and if it could be used to choose the dominant root of the system
characteristic equation to avoid false roots from numerical analysis.
3. Specified neutronic calculation for the reactivity feedback coefficients, or applying multiregional neutronic feedback with detailed neutronics model.
4. Stability analysis for the reactor startup, in which the flashing effect must be considered.
5. Time domain analysis, which allows for a more detailed inclusion of friction factors and
local slip, may lead to better estimate of the conditions for limit cycle and other
instability characteristics.
-111-
References
Aritomi, M., Chiang, J. H., et al., "Fundamental Studies on Safety-Related Thermo-Hydraulics of
Natural Circulation Boiling Parallel Channel Flow Systems Under Start-up Conditions
(Mechanism of Geysering in Parallel Channels)", Accident Analysis, Nuclear Safety, 33(2):170182, 1992
Bestion, D. "The physical closure laws in the CATHARE code", Nuclear Engineering and Design,
124, 229-245, 1990
Bour6, J. A., Bergles, J. E., and Tong, L. S., "Review of Two-Phase Flow Instability", Nucl.
Engng. Des., 25:165-192, 1973
Carmichael, L.A. and Niemi, R.O., "Transient and Stability Tests at Peach Bottom Atomic Power
Station Unit 2 at end of Cycle 2", EPRI NP-564, Electric Power Research Institute, 1978
Cheung, Y.K., et al. "Design Evolution of Natural Circulation ESBWR", ICONE-6, May 1998
Chiang, J. H., Aritomi, M., and Mori, M., "Fundamental Study on Thermo-Hydraulics during
Start-up in Natural Circulation Boiling Water Reactors, (II) Natural Circulation Oscillation
Induced by Hydrostatic Head Fluctuation", J. Nucl. Sci. Technol., 30(3):203-211, 1993
Coddington, P., and Macian, R., "A study of the performance of void fraction correlations used in
the context of drift-flux two-phase flow models", Nuclear Engineering and Design, 215, 199-216,
2002.
Dokhane, A., et al, "Nuclear-Coupled thermal-hydraulics nonlinear stability analysis using a
novel BWR reduced order model", ICONE 11, Tokyo, Japan, April 20-23, 2003
D'Auria, F., et al., "State of the Art Report on Boiling Water Reactor Stability",
OECD/GD(97)13, 1997
Furuya, M., Inada, F., and Van der Hagen, T. H. J. J.. "Flashing-Induced Density Wave
Oscillations in a Natural Circulation Loop with a Chimney - Mechanism of Instability and
Stability Map". Nuclear Engineering Design, 235(15):1557-1569, 2004
-112-
Furuya, "Experimental and Analytical Modeling of Natural Circulation and Forced Circulation
BWRs", PhD thesis, Delft University of Technology, Delft, The Netherlands, 2006
GE Nuclear Energy, "ESBWR Design Control Document", August, 2005
GE Nuclear Energy, "ESBWR Plant General Description", June, 2006
Gialdi, E., et al, "Core Stability in Operating BWR: Operational Experience", Prog. Nucl. Energy
15, 447, 1985
Hanggi, P., "Investigating BWR Stability with a New Linear Frequency-Domain Method and
Detailed 3D Neutronics," a Ph.D. dissertation submitted to the Swiss Federal Institute of
Technology, Zurich, 2001.
Hashimoto, K., "Linear modal analysis of out-of-phase instabilities in boiling water reactor cores",
Ann. Nucl. Energy, 20, pp. 789-797, 1993
Hashimoto, K., et. al, "Neutronic model for modal multichannel analysis of out of phase
instabilities in boiling water reactor cores", Ann. Nucl. Energy, 24, pp. 99-111, 1997
Hinds, D. and Maslak, C., "Next-generation nuclear energy: The ESBWR", Nuclear News, page
35-40, January 2006
IAEA, "IAEA-TECDOC-1474, Natural Circulation in Water Cooled Nuclear Power Plants", Nov.
2005
F. INADA, M. FURUYA, A. YASUO, "Thermo-hydraulic instability of boiling natural
circulation loop induced by flashing (analytical consideration)," Nucl. Eng. Des., 200, 187-199,
2000.
Ishii, M., "Thermally induced flow instabilities in two-phase mixtures in thermal equilibrium",
Ph.D. Thesis, School of Mechanical Engineering, Georgia Institute of Technology, Atlanta,
Georgia, June 1971
Ishii, M., "Study on Flow Instabilities in Two Phase Mixtures", ANL-76-23, 1976
Lahey, R. T., Jr., and Moody, F. J., "The Thermal Hydraulics of a Boiling Water Nuclear
Reactor", Chapter 7, American Nuclear Society, La Grange Park, IL, 1993
- 113-
Lu, Shanlai. "GE Simplified Boiling Water Reactor Stability Analysis in Time Domain", Ph.D.
Thesis, The Pennsylvania State University, May 1997
Manera, A., "Experimental and Analytical Investigations on Flashing-Induced Instabilities in
Natural Circulation Two-Phase Systems". PhD thesis, Delft University of Technology, Delft, The
Netherlands, 2003
March-Leuba, J. and Blakeman, E.D., "A Mechanism for Out-of-Phase Power Instabilities in
Boiling Water Reactors", Nuclear Science and Engineering: 107, 173-179, 1991
March-Leuba, J., and Rey, J.M., "Coupled Thermohydraulic-Neutronic instabilities in boiling
water nuclear reactors: a review of the state of the art. Nuclear Engineering and Design", 145, No.
1-2, 97-111, 1993
Mata, P., et al, "Analysis of Cofrentes abnormal plant transients with RETRAN-02 and
RETRAN-03", Nuclear Technology, Vol. 100, n 2, p. 203-215, 1992
Mathisen, R. P., "Out of Pile Instability in the Loop SkAilvan". In Symp. on Two-phase Dynamics,
pages 19-64, Eindhoven, Netherlands, 1967
Munoz-Cobo, J.L. , et al., "Non Linear Analysis of Out of Phase Oscillations in Boiling Water
Reactors", Ann. Nucl. Energy 23, 1996
Munoz-Cobo, J.L., et al, "Coupling of density wave oscillations in parallel channels with high
order modal kinetics: application to BWR out of phase oscillations", Ann. Nucl. Energy, 27,
pp.1345-1371, 2000
Munoz-Cobo, J. L., Podowski, M.Z., and Chiva, S., "Parallel channel instabilities in boiling water
reactor systems: boundary conditions for out of phase oscillations", Annals of Nuclear Energy, 29,
pp.1891-1917, 2002
Peng, S.J., Podowski, M.Z., and Lahey, R. T., "NUFREG-NP: A Digital Computer Code for the
Linear Stability Analysis of Boiling Water Reactor", NUREG/CR-4116, July 1985
Podowski, M. Z., "Modeling and analysis of two-phase flow instabilities", NURETH-10, Seoul,
Korea, October 5-9, 2003.
Rao, A.S., "ESBWR DESIGN DESCRIPTION", NEDO-33084, August, 2003
-114-
Saha, P. "Thermally Induced Two-Phase Flow Instabilities, Including the Effect of Thermal NonEquilibrium between the Phases", Ph.D. Thesis, School of Mechanical Engineering, Georgia
Institute of Technology, Atlanta, Georgia, June 1974
Takeuchi et al., "A study on boiling water reactor regional stability from the viewpoint of higher
harmonics", Nucl. Tech. 106, pp. 300-314, 1994
Todreas, N. E., and Kazimi, M. S., "Nuclear System I, Thermal Hydraulic Fundamentals",
Chapter 9, Hemisphere Publishing Corporation, 1990
Tong, L.S., "Boiling Heat Transfer and Two-Phase Flow", Chapter 6, Taylor & Francis, 1997
Van Bragt, D.D.B., et al., "Analytical modeling of flashing-induced instabilities in a natural
circulation cooled boiling water reactor, Nuclear Engineering and Design", 215, 199-216, 2002
Van der Hagen, T.H.J.J., et al., "Methods for the determination of the in-phase and out-of-phase
stability characteristics of a boiling water reactor", Nuclear Technology, 107, p. 193-214, 1994
Van der Hagen, T.H.J.J., Zboray, R. and Kruijf, W.J.M. de, "Questioning the use of the decay
ratio in BWR stability monitoring", Annals of Nuclear Energy 27, p727-732, 2000
Wang, Fu-Shin, et al, "Thermal and Stability Analysis of a Two-Phase Natural Circulation Loop",
Nuclear Science and Engineering: 117, 33-46, 1994
Wulff, W., et al., "High-Speed BWR Power Plant Simulations on the Special-Purpose Peripheral
Processor ADO1," BNL-NUREG-34167, International Conference on Simulation for Nuclear
Reactor Technology, Cambridge, England, April 9-11, 1984
Yadigaroglu, G. and Askari, B., "Boiling water reactor stability revisited: The effects of flashing",
Nuclear Engineering and Design, 235, 1093-1105, 2005
Zhao, J., Saha, P., and Kazimi, M.S., "Stability Analysis of Supercritical Water Cooled Reactors",
MIT-ANP-TR-108, Cambridge, Massachusetts, September 2005
-115-