Diploma of Civil Engineering 1973) Submitted in
advertisement
 Submitted in")
DYNAMIC STIFFNESS FUNCTIONS OF STRIP AND
RECTANGULAR FOOTINGS ON LAYERED MEDIA
by
GEORGE CONSTANTINE GAZETAS
Diploma of Civil Engineering
National Technical University of Athens
(July 1973)
Submitted in partial fulfillment
of the requirements for the degree of
Master of Science in Civil Engineering
at the
Massachusetts Institute of Technology
February, 1975
. . .
Signature of Author
Department of Givil Engineering, Novemoer 5, 1974
Certified by
. . . . . . . . ...
Thesis Supervisor
Accepted by......
Chairman, Departmental Committee on Graduate Students of the Department of Civil Engineering
ARCHIVES
APR 10 1975
1BRARIES
Page 66 is missing from the original.
ABSTRACT
DYNAMIC STIFFNESS FUNCTIONS FOR STRIP AND
RECTANGULAR FOOTINGS ON LAYERED MEDIA
by
GEORGE GAZETAS
Submitted to the Department of Civil Engineering in February 1975
in partial fulfillment of the requirements for the degree of
Master of Science in Civil Engineering
The dynamic response of a rigid strip or rectangular
footing perfectly bonded to an elastic layered halfspace
and excited by horizontal and/or vertical forces and by
rocking and/or twisting moments is studied.
The solution is derived using a Fast Fourier Transform for a unit load under the footing and then integrating over the width and imposing the condition of rigid body
motion for the footing.
The results for the halfspace compared with known
analytical solutions show very good agreement. The effect
of the rigidity of the rock on which the soil layer(s) rests
is primarily investigated. The solution converges to the
halfspace one if the rock has the same properties as the
soil layer.
Thesis Supervisor
Title
Jose' M. Roesset
Professor of Civil Engineering
Acknowledgements
The work presented in this document constitutes the Master's
Thesis of Mr. George Gazetas, submitted to the M.I.T. Department
of Civil Engineering. It was made possible through a Research
Grant, No. GI-35139, by the National Science Foundation. It is
the fifth of a series of reports on Nonlinear and Coupled Seismic
Effects published under this research grant.
Professor Jose M. Roesset's guidance and assistance throughout all stages of this research is gratefully acknowledged. Thanks
are extended to Mrs. Malinofsky for the typing of the thesis.
Table of Contents
Page
Title Page
Abstract
Acknowledgements
Table of Contents
List of Figures
List of Symbols
Chapter 1
-
Early Approximate Solutions
Scope of this Work
Soil Properties
1.1
1.2
1.3
Chapter 2
-
2.1
3.1
3.2
Strip Footing on a Layered Soil - Formulation
Derivation and Solution of Basic Differential
Equation
Layered System
Boundary Conditions
2.2
2.3
Chapter 3
Introduction
-
Parametric Studies
Halfspace
3.la
Effect of Number of Points and of their
Distance on the Stiffness Functions
3.1b
Comments on the Curves
Layer on Rock
3.2a Effect of Number of Points and of their
Spacing on the Stiffness Function
Table of Contents Continued
Page
3.2b
Layer on Rigid Rock
67
3.2c
Layer on Elastic Rock
75
Chapter 4 - Rectangular Footing
4.1 Formulation
4.2 Results
Summary and Conclusions
104
References
106
List of Figures
Page
16
1-1
Evolution of Solution for Dynamic Motion of Rigid
Loaded Area
1-2
Definition of Equivalent Modulus & Damping Ratio for
a Hysteretic Material
17
2-1
Strip Footing on a Layered Soil
21
2-2
Wave Front and Wave Number
25
2-3
Significance of Complex Wave Number (Rayleigh Wave)
25
2-4
(Complicated) System of Reflected and Refracted Waves
Resulting from a P-wave Incident in a Layered System
27
2-5
System of Co-ordinate Axes
28
2-6
Key Problem to Rigid Footing Formulation
28
3-1
Typical Cross-section
41
3-2
Stress Distribution under the Footing Due to the
Fourier Transform
42
3-3
Explanation Why the Actual Width of the Footing
Should be Taken between B and B'
42
3-4
Rocking Stiffness vs. A
44
3-5
Swaying Stiffness vs. a0
45
3-6
Imaginary Stiffnesses vs. a0
46
3-7
Corrected kp
vs. a0
48
3-8
Corrected k> , vs. a0
49
3-9
Corrected kxx vs. a0
50
Correlation between Wavelength of AX
52
3-10
List of Figures Continued
Page
3-11
k' vs. a0
3-12
Imaginary k
3-13
k'
3-14
k' vs. ao
56
3-15
k
57
3-16
Comparisons of F
with known solution
58
3-17
Comparisons of F
with known solution
59
3-18
Layer:
k
vs. a0
63
3-19
Layer:
k
vs. a0
64
3-20
Layer:
k
vs. ao
65
3-21
Layer of Soil on Rigid Rock
68
3-22
68
3-23
Theory of 1-D Amplification: Natural Modes of
Vibration
F vs. a0 (Smooth and Rough)
3-24
F
vs. a0 (Smooth and Rough)
70
3-25
F
vs. a0 (Smooth and Rough)
71
3-26
Fz
vs. a0 (Smooth and Rough)
72
3-27
Influence of Rock Flexibility on F
vs. a0
76
3-28
Influence of Rock Flexibilityon F'
vs. a0
77
3-29
F
vs. a0 (Cr s = 4)
82
3-30
F
vs. a0 (Cr
s = 4)
83
3-31
Fxr vs. a0 (Cr/Cs
3-32
3-33
53
vs. a0
54
vs. ao
55
vs. a0
69
4)
84
Fz
vs. a0 (Cr/Cs = 4)
85
k
vs. a0 (Cr
86
s = 4)
List of Figures Continued
Page
3-34
k
vs. a0 (Cr/Cs = 4)
87
3-35
k
vs. a0 (Cr/Cs = 4)
88
3-36
kz
vs. a0 (Cr/Cs = 4)
89
3-37
F
vs. a0 (Cr/Cs = 2)
90
3-38
F
vs. ao (Cr/Cs = 2)
91
3-39
F
vs. a0 (Cr/Cs = 2)
92
3-40
Fz
vs. a0 (Cr/Cs = 2)
93
4-1
System of Forces and Moments
95
4-2
Grid Used for the Evaluation of the Fourier Transform and the Flexibility Coefficients for Points
under the Footing
96
4-3
k
and k
vs. a
102
4-4
kt and k;
vs. ao
103
1
1
List of Symbols
a
Cs
- dimensionless frequency (with respect to footing
half-width)
B
=
halfwidth of strip footing
Cp
=
dilatational (P) wave velocity
Cs
=
shear (S) wave velocity
p
=
soil density
=
normal stresses (a,
T
=
shear stresses (T
H
= thickness of the soil layer
v
=
y/g
Iy, az)
,T
xz
T
zy
Poisson's ratio
nth natural cyclic frequency (rad/sec)
n
o
=
= cyclic frequency of excitation (rad/sec)
=
Lame constant
G
=
shear modulus
7T
=3.14159 ...
u
= horizontal displacement
List of Symbols Continued
[F]
=
compliance matrix
zz = vertical flexibility function
Ft
=
torsional flexibility function
F
=
real part of F
F
=
imaginary part of F
[K] = stiffness matrix = [F]IV
Kxx = swaying stiffness function
K
=
rocking stiffness function
K
=
cross-coupling stiffness function
k
=
vertical stiffness function
Kt
=
torsional stiffness function
t
=
time
= percentage of critical internal damping of the soil
= rotation (rocking)
0
= rotation (torsion)
List of Symbols Continued
w
= vertical displacement
E
=
y
= shear strain
strain (c ,
y,' ez)
(y
,yyz'
zx)
= rotation with respect to i,j
Wj
VV
=
E
change in unit volume (=
2
V2
= Laplace operator =
2
+ Dy
e +
x
y + 6)
z
2
+
= directional cosines of the wave front
m,k,n
= dilatational (P)and shear (S)wave numbers
h,k
T,B = top and bottom matrices
*
*
*
*
PY, Pz , M
P,
*
,
*
M2, M
=
forces and moments acting on the footing
F
= swaying flexibility in the x direction
F
=
swaying flexibility in the y direction
F
=
rocking flexibility function
= cross-compliance (flexibility) function
List of Symbols Continued
U()
=
Fourier transform of u(x) at z = 0,
W()
=
Fourier transform of w(x) at z = 0,
=
=
=
S()
{ u(x)ew x
~00
x
- ix
faa
(x)e
=
Fourier transform of G(x) at z = 0,
=
frequency of excitation (Hz)
=
natural frequency of soil layer (Hz)
=
2M+l = total number of points representing the free
surface
=
2m+l = total number of points under the footing.
x dx
13
CHAPTER I - INTRODUCTION
The machine foundation problem has recently received very much
attention due to the new trend towards larger machines and the detrimental effects of the resulting vibrations of the ground on nearby
structures.
The whole problem can be divided into a number of sub-
problems:
(1) the dynamic response of the footing
of dynamic energy;
supporting the source
(2) the response of the nearby structures due to the transmission of energy through the soil; and
(3) the response of the structure supporting the machinery due
to the vibrations of the machine and the footing.
The objective of machine foundation design is to keep, for a
given frequency, the amplitudes and velocities or accelerations of
the footing of the structure it supports, or a nearby structure below
certain critical values which depend on the function of these structures.
The parameters on which the response of the footing depend for a
given frequency and applied force of the machinery are:
(1) the geometry of the footing (shape and dimensions, embedment,
mass and mass moment of inertia); and
(2) the soil properties (layers and their dynamic properties).
The latter parameter is very difficult to determine.
Various models have been suggested to simulate the dynamic stressstrain behavior of the soil.
The simplest and most widely used is the
linear viscoelastic model, with the hypothesis of a homogeneous, isotropic semi-infinite elastic solid (halfspace). Use of this model does
not imply that soil is actually thought to be a fundamentally viscoelastic material.
Rather, this model is used because it can be easily
handled mathematically, and, by suitable choice of parameters, its response can be made to fit the key features of the response of a hysteretic material.
The whole machine foundation problem is a very complicated one.
It is a wave-propagation problem with mixed boundary conditions: that
is,force and displacement compatibilities.
In other words, it re-
quires matching the displacements of the soil and the structure under
the footing while leaving the free surface without normal or shear
stresses.
Most of the studies and research done on this subject assume perfectly elastic halfspace.
Very recent solutions based on the finite
element method consider the soil as a series of layers resting on
rigid rock.
In this work, both a rigid strip footing and a rectangular footing
are considered, resting on a more realistic soil profile-that is, a
series of layers resting on an elastic rock, through which waves can
be transmitted. The rather unusual but simpler case of a flexible
footing (simple boundary value problem) can also be treated with the
developed computer program.
The solution was derived using a fast Fourier transform for a concentrated load under the footing and integrating across the width while
imposing the condition of rigid body motion in this area.
1.1
Early Approximate Solutions
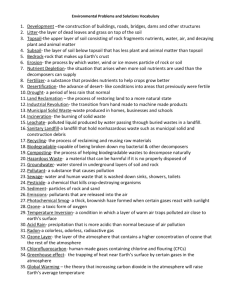
Figure 1.1 shows some of the early approximate solutions in
historical sequence, indicating the assumption made concerning the
distribution of stresses on the contact area.
If the distribution
of stresses in the contact area is predetermined, the displacements
will generally not be uniform, and hence the solution will not be
completely accurate.
Sung and Bycroft used the static stress distri-
bution. Thus the solutions arrived at are probably good for very
low frequencies, but at higher frequencies the distribution of stresses changes and the accuracy of the solutions decreases.
Lysmer and
Richart derived solutions by taking into account the frequency dependence of the stress distribution under the footing. Use of the
Finite Element Method with energy-absorbing boundaries gave great
impetus to the whole field, and thereafter a vast number of solutions
have been obtained by various researchers.
1.2 Scope of this Work
The problems considered here are the steady-state harmonic vibrations of a massless rigid strip or rectangular footing resting on the
surface of a layered system and being excited by forces applied on it.
The soil is considered as a series of linearly viscoelastic, homogeneous and isotropic layers resting on top of an elastic or rigid rock.
ASsumea
stress
S 01LL+ i C
Ad§G+ri((A
oef
+1iOV
v+.v
Olt cevle- ie
Oaueryo~e - ov-
(A0
eA-4 ce.&ev-hne
(ylC19
2 )
Thctt QI vr
uni f{ormY cis?.
QaUj- \ICxv\ 0 qS D)
X-i
vm Jer -,icthc
cver\, eAl
tooac .
we),K e-A o.,ev-oL~
Bcy-of
a ii10
(lj6)
cl cspkacemrevi
adok ra < ' ut
O~f cbASIOA&d
Lyner Q19Gs)
?rQmuye
o
c4I 11 +k il
ike
Fic-u -
1.
L/,Ii5if~
teygiwkere
M r/,4ke scamve.
ia
e+
is
-sam~~e
E\40 LU T10'
mo-TioM
oF
OP
P IGID
SOLUTIONS
LOAD~ED
FCoK -A(NArAIC
A R.EA
-C
-
S
Locu~s ol +fps c
loco? S
k S e-Es
fN
T ime
ShecLr
strain
LooPS
SIMPLE
FKOM
C'/CL1'Z
LOATONGx IN
SHEAR.
'
EqiaK el
Enercgj
cxdsoy-bea
0{
k
ea.
I
(00?(bv'j)
,~MayumuM zioreci ener~'J
siriy%
e
AW/W
43l
43
F i GuRPF-
.2-
VEF(NMTON
OF
EZL 0IVALE 7
MH(STERET1c M1ATF-RAL.FOR A
MoIDULUS
4.
3>APi~eNG'
RATI~o
In Chapter 2 the formulation is presented for the case of the
rigid strip footing.
In Chapter 3 compliance (flexibility) and
stiffness functions are presented for the case of an elastic halfspace, a single layer of soil on top of rigid rock, and a layer on
top of elastic rock of variable stiffness. Comparisons are made between the responses of the above cases.
Flexibility functions for
a so-called smooth footing (relaxed boundary conditions) are then
compared with those above.
In Chapter 4 the formulation of a rec-
tangular footing is summarized and results are presented for a few
cases.
Conclusions and recommendations are finally given in Chapter 5.
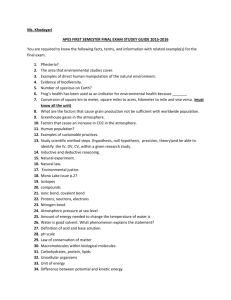
1.3 Soil Properties
At strains less than 10-5, soil is nearly elastic, with viscoelastic action present to a very small degree. At somewhat larger
strains, however (of the order of 10-3) nonlinear effects begin to
show.
Figure 1-2 presents the stress-strain relationship of most soils
subjected to symmetric cyclic loading conditions.
Each cycle of load-
ing results in energy loss due to hysteresis, and time-dependent effects are secondary in importance compared with nonlinear effects. For
strains higher than 10-3, time-dependent effects may become important,
while still secondary to nonlinear effects.
According to the theory of "equivalence," the shear modulus
("equivalent") of the linear system is taken equal to the slope of the
line connecting the tips of the hysteresis loop in the T-y axes, and
the damping of the linear system is taken so that the area of the sys-
19
tem's hysteresis loop equals the area of the real material hysteresis loop.
The key in the theory of equivalence lies in picking parameters
consistent with the expected level of strain.
The above model can be mathematically expressed by considering
the soil moduli in complex form:
G = G1 (w)+ i G2 (w) ~G + i G2
X = Xl(w) + i "2(w)
X1 + i X2
where, according to the above-mentioned, G , Xi (i = 1,2) are almost
frequency independent.
Poisson's ratio is taken as a real quantity.
The imaginary part of the moduli is associated with the energy
The ratio
loss due to hysteretic damping.
G2/G
= tand
is called
6 is the loss coefficient: that is,the phase lag
the loss tangent.
between force and displacement during cyclic loading.
In general the damping capacity $ equals:
$ = 27r tan6
Defining as damping ratio
2
TrdT
(for small a).
the ratio of the viscous damping coeffi-
cient to the value of this coefficient necessary to suppress the periodic free vibrations, the relationship
P = 4Trr
6 = 2a
Therefore
G
=
is true.
and the shear modulus can be written:
G(l + 21M).
This formula was used in this work.
20
CHAPTER 2 - STRIP FOOTING ON A LAYERED SOIL - FORMULATION
2.1
Derivation and Solution of Basic Differential Equations
The equations of motion for a linear, elastic and isotropic
medium and plane strain conditions are:
xz _
x+
2
2
Dxz +
=
w
at
The strain-displacement relations are:
x
aw
E
au
ax
z
az
xz
au + aw
z
and the constitutive relations are:
a
= xE + 2 G x
az = xE + 2 G z
= G
xz
yxz
where
E
S, p
axu
+ aw
az
-
+ z
G are the Lame constants
and
_2v G (v = Poisson's ratio).
ax
-SSo
-oodv
s zero
2,W
51>
S
fl
>-T E NDS
1.
Iv) C, I Vn
)
Pr)
FicoonsF 2.
-
CS
To
V
INFINITY
G-R TRiP FooTING
ON
A.LA'fEE.ED
SOIL
Calling wxz
-
and after some manipulation, one can
easily get two independent differential equations:
(+ 2G)
(
2 +
)(3x2
2
G
3x(
z +
-y
(1)
3z)
2
32 W
xz
z2 )
xz
at
(2)
or alternatively
V2E
a2E
= 2
P
cp
(3)
2
aw
(4)
oxz
Cs
with
c=
p
cs
X + 2G
p
=
V=
32 +
2
ax2
32
3z
These are the classical uncoupled wave equations of the dilatational
(3)and shear (4)waves.
The general solution of the wave equation can be written in the
form:
with k 2 + n2
F ( x + nz + t)
C
where k and n are the projections on the xz axes of a unit vector
normal to the wave front, i.e., normal to planes of constant phase.
The F function describes a disturbance which is propagated through
the medium with the velocity c. The form of the waves which is described by F remains unchanged as the wave propagates.
In this report only harmonic excitations of the footing are considered.
The response consists of two parts: the free vibration and
the forced vibrations (steady-state response) with the frequency of
excitation.
So for an excitation of the form P = P0eiwt, the response is:
E = E(x,z) eiot
xz
= W
(x,z) eitt
xz
Substitution of the above expressions in the wave equations leads
to solutions of the form:
E =A eiwt
Wxz =B eiwt
or
E
toxz
=
A e
eit
e±iw(x + nz)/cp ,
etiw(
x + n z)/cs,
±loth(px + nz)]
t
= B ei[wt ± k(t x + n z)]
k2 + n2
_ 1
k, + n'2= 1
where:
h
2
2 , and k
2
2 are the dispersion relations,
p
s
and
h & k are the wave numbers of the dilational and shear
waves respectively.
Setting
h= h ,5
k
hn =hz'
=
k9,
=k
h
=
kn
h2 + h
x
k
k2 = k + k .
z
x
and
z
That is, k , kz (or h , hz) can be interpreted as the x,z components
of a vector k (or
I)perpendicular
to the wave front and having magni-
2
2
2 = 2 2
Wdta
tude k= k2 + kz
/cs, provided that k , k<.
Significance of a complex wave number
If either k of kz is greater than k, say k > k, then
k
=
k 2 -k
=
±
k -k
i
2
=lax
a
=
real, positive.
Wx = B e-az ai(ot ±k XX
Then
xz
a
This equation
o eaie
represents xdrcinwt
a Rayleigh wave propagating
eoiyc=in the
postiv
positive
or negative (+)R
x direction with velocity c - k <
and with amplitude decaying exponentially with depth.
- wave
X+
kz
Figure
2.2..
ront
WAVE
FRONT
AND
WAVE
z = C+ot)
NUMBE..
)
~U-)
XC
-k
Z jw
Fi(GuR E 2.3.
S I GN IFICANCE
(gAY
LA I G
OF
CoMPLE)X
WAVE )
WAVE
NUMBER.
2.2
Layered System
Since every incident shear or dilatational wave produces two
reflected (S and P) and two refracted waves (S and P) at the interface between two layers, there will be a system of P-waves (longitudinal waves) and S-waves (shear waves) propagating in the positive
and negative x and z directions.
A treatment based on the principles of reflection and refraction
is possible but mathematically complicated. A more straightforward
approach is to consider for each layer a local system of coordinates
and expressions for E, LOx
xz
E =
ei(wt - hkx)
E eihnz + El e-ihnz
eikn z+
=xz (w
I
Where the terms E
ei(wt - kk x)
" e-iknz)
I
w represent waves travelling in the negative
,
z direction (upwards) and the terms E
,
,
waves travelling downwards.
The components of the displacements in the layer can be obtained
by the simple relations:
2
uU
= - 1 DE
h
k
+
W =
h
z
awxz
z
(6)
2
xz
k2
DX
and the components of the stress
lQa(eK iPSI
[c1oL~-iA-
I
Feuoga 2.4.
COMPLICATaTB
AND
SYSTEM
REFRACTED
A
FRoM
LAN(EReD
P-WAVE
$NCTEF.
WAVES
OF
REFLECTED
RESULTING
INcN1)ENT'
iN
A
FtIwe2. 5.
Sysdcm of
co-cotinacxe- cL-Ae5
-P-I-z
'pk
i
m
I
I
a
-TM
Fi~ure 2.G.
RE'i'
PROBLEM
FiND TRE
(OF
S1
-THE
To' PJQ3it
]'ISPLACEMEWNTS
FK?.E- SUR-FAC-C-)
EAP MUI
ATr
F00TING
A7 -ttE
FoR.- A
T-HE
FORMIULATioW.
op.4GrI
uI-T
W~OKMAL
ANDJ
S=
E + 2G
(7)
G (U
T
+3)
Using equations (5) into (6)and (7):
u = +
i k
e\
i(wt - k9 x)
+ 2 i n- e - ikn z
k
)
(ikn z
+ (-2i +ne
w - +
ei(wt - hzx)
eihnz E' + i 9 e-ihnz E)
o
ei(wt - h9,x)
-ine ihnz El + ine-ihnz Ell
h
(_h
- (2 j-eikn zw' + 2i
4
i(wt - kk
e-ikn z w.e
(8)
a = + (x
+(4Gn 1
eikn z
'
_ e-ikn z
"
ei(wt
-
h9x)
ei(wt - k9 x)
=(2 Gn. eihnz E - eihnz E ) ei(wt - hgx)
T
-
2.3
eiknz E + e- ihnz E
+ 2Gn 2
+(2G(n 12
912)
eikn z W' + e-ikn z
)
e (t - k9
x)
Boundary Conditions
Relations (8)hold for every layer. Since the layers are con-
sidered as welded at the interfaces, the boundary conditions at the
interface between jth and j + 1)th layer are
u. (H.)
=
u
(0)
w. (H.)
=
W
(0)
(9)
a
(H.)
=
a
(0)
T
(H.) =
T
(0)
U. (H.)
or in matrix notation,
=
U
u
(0), where U =
w
In order to satisfy these equations for any x,
I
H.k. = h.
s .. =
= k
I
k.
j = 1, 2, ...
z,.
,
y
(10)
(Snell's law of refraction)
Due to (10) the left-hand side of equations (9)can be written in
matrix form as
U. (H ) = B. A. ei(Wt
J 3
33J
- hkx)
= B A. f(xt)
and the right-hand side as
Ugg (0)= T.
UBOT = BA f(x,t),
E,
A =
,
E"
li
A
f(x,t)
UTOP = TA f(x,t), where
mairi ces
and B, T the "bottom" and "top" respectively are as given below:
-2ijn
20
-21
h
(42Gn2)
-2Gn
.
S9
-2i
-2i
X +2Gn
4Gn
2)
2G(n 12
k
q
i
Cg+2Gn 2)g
4Gn 9. q
-2Gn Pg
2G(n'2_ ' 2 )q
n q-1
2i2 1'
*n 9-1
g
(A+2Gn2
2Gnkg
q
2
2G(n'2_
ih g
g = eihnH
where
-4Gn k
2Gn P.
-2i n q
-2i
2
-1g
1
-2i
.
q~1
-4Gn I p,I qI
2G(n'2_ '2 -1
eikn H
With the above notation the boundary conditions (9)can be written for the successive interfaces starting from 1-2 and ending with
n-rock.
Eliminating f(x,t), which is a common factor, we get:
=T2
=T3
Bn An -T r Ar
We can write thus
A
(B1 T 2 B
1
-B_1 T B_1 T
1 2 2 3
T 3 ...
B
T)
A
B_1
T B_1 U (H)
n-i n n n n
...
or
U(0) =T, B1T2 B2... Tn B~nU (H )=
RUn (Hn
For the case of rigid rock, where the displacements (u) are
specified at the nth interface
=
U'(0) =
)
R
R
R21
R22
and therefore
(U)
w top
= R 1 (ubottomr
+ R12 Gbottom
W botton
T top
= R2 1
(U)
+ R2 2 (a)
T bottom
where top refers now to the free surface of the soil deposit, and
bottom to the soil-rock interface.
=0
In particular, if (u)
wbottom
(u)
ax
w top =R 1 2 (T)
= R12 R22
bottom
top
T
top
(11 )
This expression relates then displacements at the free surface
to forces (stresses) applied at the same level.
For the case of elastic rock
U(O) = R Un(Hn) = R Tr Ar = Q Ar
"
11
(Q)
Q2 1
L
~i
Q12
Ar
Q2 2
Ar
Since there are no incoming waves from the rock for a surface
excitation
Ar = 0
w top
T
top
=
Q1 2 Ar
=
Q2 2 Ar
and therefore
uo
top
Q12
Q2
(G)
(12)
top
Notice that expressions (11) and (12) can be considered equivalent. Only equation (12) need be used if one defines
R =
T B1
Q = R for rigid rock
Q = R Tr for elastic rock.
That is to say, by performing an additional post multiplication of
the matrix R by Tr in the case of elastic rock.
For the case of a
half space, the matrix R is an identity matrix and the matrix Q
is simply Tr'
Boundary conditions at the free surface
Equation (12) relates forces and displacements at the free
surface of the soil deposit for any layered stratum. If stresses
o(x),
T(x)
are specified at the free surface (simple boundary value
problem), it is then sufficient to write
cy(x)
=
S()
=
3(E) ei
+00
with
x dE
-~
dx
{a(x) e~"
and similarly for
T (x),
T (E).
One can thus solve equation (12) for any particular E, by setting for each layer
h.
=
k
U(3)
.
= -
,
3
{w()}=
W(E)
022
01
Q2E)Q2
S(E
)
T(E)
and the surface displacements are then
u(x) = 1
w(x)
=
2
{
U()
leading thus to
eiEx dE
W(E) eiEx dE
Rigid footing formulation
For the case of a rigid footing, we have a mixed boundary
value problem, where stresses are specified at the free surface outside the footing, but displacements are imposed under the footing.
To solve this situation, we consider a set of 2M+l equally
spaced points on the free surface, and determine first their displacements for a unit normal and shear stress pulses centered at the
origin.
It is possible to solve then for each one of these unit rectangular pulses a simple boundary value problem as before, obtaining
for any point i on the surface
PE d. d
1
1
P0
{iJ
[oi42P
0d21
u iZ
w0
d2ol
z~~0
i
d2]2
ol
{P}
Z
012
0
oi.
The terms d0o are flexibility coefficients, or displacements
under unit loads.
Noticing in particular that, as the load moves to any other
point, the displacements at all points would just be shifted by the
amount the load has moved, it is possible to write for the set of
points under the footing,
u
D11
00
0
w
D21
u1
l
00
ol
D12
D11
ol
00
D21
D22
00
ol
D12
01
D22
ol
12
D12 D1 1 D
ol
o
o
. 11
om
D12
om
p0x
. 21
om
D22
om
g0
D11
..
D)12
D(m-l)
p
Px
z
pz
u
2
w2
Di
om D12
om
ur
12
Dii
ol Dol
J
C2(m+1)
w
D2om1 D22
om
x
D21
ol
D22
ol
D00
oo
D12
oo0
D22
D21
oo
oo
pm
x
Pm
z
1 = 2(m+1) x 2(m+1) x 2(m+1) xl
) = [D*1
(k')
(18)
Due to the rigid body motion of the footing, it has three
degrees of freedom, namely: vertical translation W, horizontal translation V, and rotation q),which are related to the u., wi displacements of the (m+l) points under the half footing by the following
relations:
u.
= v
w
=
w
+
i
xi
, 2m
i = 0, 1, ...
and in matrix notation
1
0
0
x0=0
1
0
V
V
ut
=[T]
Vw
w
xm
4)
w
I
2(m+1) x 1 = 2(m+1) x 3
S3 x 1 )
The resultants of the applied point forces (stress distribution
under the footing) are
m
Px.
+
+
-m
m
-m
Pz.
1
m
-m
or alternatively
Pz xi
i
+
*
Px
Pz
0 1 0
l .
0
0
x1
0 ...
0
x-m
1
0
1
0 ...
a
1
..
1
0
Px
[T]T
for x
(20)
Pz
Relation (18) is solved
PD]
x
=
[D*]~
[T]
[D*]I
and due to (20)
* N
V
V
[T]T [D ]
Pz
where
[K*
[T]
W
W
[K*I = [T]T [D*]I
[T]
is the stiffness
matrix of the system.
By inversion, the flexibility matrix can be obtained:
-l1
[F] = [T]~- [D* I
[T]T
and the force-displacement relation can be written as:
39
V
-
1
F
=
F
xx$
0
P
x
F
$x
F
0
$$-4
M
0
0
P
Z
Fzz
*
*
since, clearly, only swaying and rocking are coupled, while vertical
translation is independent of the other two.
CHAPTER 3 - PARAMETRIC STUDIES
In most of the analytical studies in the area of dynamic soilstructure interaction, the "soil" has been treated as a homogeneous,
isotropic and elastic halfspace.
Only recently, the "soil" has been
considered as a series of layers resting on a "rigid" base.
With the method described in detail in Chapter 2, the more general case of a system of layers resting on "elastic" rock can be
solved as well.
Throughout this chapter the influence of the "soil" properties
(halfspace vs. layers on rigid or elastic rock) on the dynamic response of a massless rigid footing was primarily investigated.
The
results of this investigation are presented in plots of either dimensionless flexibility, or dimensionless stiffness functions versus
dimensionless frequency a .
Another significant contribution of the above method is the possibility of examining the case of a "smooth" footing with the same
computer program, since this case (relaxed boundary conditions) is
the one that has been normally solved in previous studies.
The influence of the geometry (mainly the H/B ratio) has been
investigated in the previous work of Victor Chang Liang for continuous strip footing and of Eduardo Kausel for a circular footing.
So
it was not given particular emphasis in this research.
The solution scheme described in Chapter 2 is based on the use
of the Fourier transform.
From a practical point of view, it is con-
RiGiT.) f:oo-rING
FIGL)PE
3A.
R cz urt cm 3 .'2.
VERTiCAL VISKATiON)
!S-TR.F-SC
Durc To
Ti4E
DIS-rRMUTIGN
FouPIGF
L)t4DE:R.
-rFA-NSFOPt-e\ -
-r4r FOOTIM(jr
FCGUR 3.-3 E-PLANJATION VWJNY -T14
OF
T14r
FoorJ,..IC
%eTrW6N-
o
~r
C1)
e)
SH*OULD
&N iD bf.
of
cdjs
eo6 AiC
the {c..
l.v
Y-,rLo-o is ouQreg(rnrajtecLt
N ~ocI(IINO
ICA~
ACT7UAL LWI1TR
IBE TAKGN
venient to use the Fast Fourier transform algorithms, which are
extremely efficient.
It must be noticed, however, that in this
case we have really a discrete transform, rather than the actual
continuous transform, and therefore the integrals do not truly extend from -w to + 0. As a result, a first question that must be
investigated is the total number of points in the discrete transform needed to get a good accuracy.
A second point of concern is the number of points under the
footing needed to reproduce accurately the unknown stress distribution under the foundation.
3.1
Halfspace
3.la.
Effect of number of points and of their distance on the stiffness functions for a halfspace.
Because of the discontinuity of the applied load at the edge
of the footing (Pm at x < m x (Ax),
0 at x > m x(Ax)), the Fourier
transform does not converge at the exact value, but at the
f(x+0 2+ f(x-0) .
So the assumed stress distribution may be like the
one shown in Figure 3.2 (for vertical vibration).
This distribution
corresponds to an increase of the width of the footing by a fraction
of Ax.
This becomes clear by running cases with different number of
points under the footing (and therefore different ,x) and plotting
dimensionless stiffnesses, k ,/GB,
k /GB2 .
Figure 3-4 shows k /GB2
x14, ' = 17 ,
M = L1024) m
N
2.S
9
x
= S.
kOCK-I
x}
[-
\9
'28+/
II- /
Li-
/
I-st-
/
(I)
u~'U
0. 6
o.4
Qo f
Figure 3.4.
.
Rocking Stiffness vs. a
N G
sW
AY(N G
V17111171=17
H ALS PACE
2.o0-
x
.7
1.51-
\
\.
0
U,
..-
1.0I\
V/
/
yy= <,
x=.
256 G
1)
(~1= I024,
m'= 9Ax=I0.
=6x o.
mvi'=%
G4)
|
0.0
O.O
(04
^
O
Figure 3.5.
Swaying Stiffness vs. ao
0.6
I.x
0
C\j
Y-'A
UA
L
~;>
y,(-al
M~p,.4j
s5\at}I1S
/LO
C)
(N-j
II Ii
'0
VI)
E-
versus dimensionless frequency ao
B/cs, having as parameters the
numbers of points M', n'.
The curves with Ax = 10 and 9 points under the footing, having different total number of points, fluctuate around the curve
having Ax = 10, m' = 9, and maximum total number of points M' = 1024.
The curves with Ax = 5 and m' = 17 points under the footing fluctuate
around the curve having Ax = 5, m' = 17 and M
=
parallel, but below the curve with (Ax = 10, m'
1024, which is almost
=
9, M
=
1024). This
must be expected, since the "total" width in the second case is 2B
80 + 5 = 85 < 2B' = 80 + 10
=
normalize with respect to 2B
=
90, of the first case, while we still
=
80.
(With the kxx/G this did not occur,
since the normalization is done with respect to G only).
The curves obtained by dividing by the "total" width B = B + 2,
instead of B, showed the reverse trend, since the actual stress distribution (Fig. 3.3) is (more likely) the
1 and not the
So k /GB' 2 was
tacitly assumed when normalizing with respect to B'.
overestimated by the moment of the areas A between
2 , which is
1 and
2 with
respect to centerline of the footing, which is larger when Ax is larger (1st family of curves).
An intermediate value between B and B was considered the most
appropriate in this case.
So a
Bequiv = B-B' = Ax yi(m + 0.5)
was used.
The results are shown in Figures 3.7, 3.8, 3.9.
The kg/GB2
curves for the above two cases (AX = 10, m = 9, M' = 1024, and
In.'
-~
07
C/1,
0
,St
Q,
fne .5
ii0
~Ln
'~i~cn Re
Ckq)/G B2
-0.5
A L FS PA CE
R
-o.4
-.
...
Io
-0.3
x= 0.
Z2x
U
-0.2
-
-
~ - --
-0.1
~
-
--
M
M'=
102.4
I
I
o.'
0.4
0.6
GE
70
Figure 3.8.
Corrected k
,
vs.
a
0
l-
+
SWAY I N G
IAL.FS PA CF.
vi'= 02.4m g 2.0 --
'I)
II
c,
1-0J
0.5
CLO
7t
Figure 3-9.
Corrected k
vs.
a0
Ax = 5, m' = 17, M' = 1024) differ only slightly, and for very low
frequencies.
For dimensionless frequency ao ~ 0.47t to 0.5Tr they
almost coincide. The k /GB vs. a
curves (Fig. 3.8) show a very
similar trend. So the new "definition" of B was considered appropriate.
Comparing on the other hand the family of curves with M
=
256
and variables m and Ax for low frequencies, it is evident that the
larger the number of points under the footing (and hence the smaller
the Ax), the larger is the fluctuation of the resulting curve. Thus,
the (m' = 9, x = 10) curve is worse than the (m' = 5, Ax = 20).
can be explained as follows:
This
for low frequencies, the wavelengths are
large, according to the dispersion relation:
X = C/f.
Thus the resulting Rayleigh waves attenuate only after a long distance (due to internal damping of the soil).
Since the distance in the x direction covered by the Ax = 20
case is twice as much as the one considered by the Ax = 10, and the
points are taken close enough to reproduce the large wavelength, the
(m' = 5, Ax = 20) curve is more accurate than the (m' = 9, Ax = 10)
one.
For example, for Cs= 1600 ft/sec and frequency f = 4 cps,
x = 1600
-
400' = 20 x Ax
Ax = 20 can reproduce the motion very well
/
/
3 21012.3.
~1
L arcle wauieyx 4
+ke ra4i~oK e ecf
i I4
SMOAIO
NY{
or-
ca~mof 6e repr6(Lcecd
a. jcA64a bcUiumf~oer of
-x
A, . .n . n A. .
U-TTIUIV.1v.
ver
LuaetQO
FI(3uR&E
+&.
3.10
4ke c4 ress JiiS-i~tmno
is noi~ well reoLL-c
CO RKELA-TION
AN~D
6 X .
13TVJG GN
und
WiAh
er 4K e- Ai
Ire
L.'x
WA~VE Lr A QT H
2.O)
SANG
H-AL
C
M' = 10 24
-
--
M'
2.56
r
256
S-M'=
A
o
=
M'
M o24
2.6
m
17
'=
AX =M
S.
1 1, A X-= S.
m'= 5
rn =33
,
x
20.
,x =2.5
i nc reas
-e 9 ue-AnC
r-n r' u3i tn croSu-s
riodcifcc~Ateovi)
0.0
Q0
Lo
Figure 3.11.
k
vs.
ao
FSPA
21-
10
x
-- 01
HALF -SPACE
0
0
M =256
M" =10z4,
-- - -
C/)
.O)
,
Y '-:
)
AX
5.
Ax
=2= .
7
I
0
M'1= 2 5 6
m'=l7
mv~
17 ,
I
1-0
\.j -
Figure 3.12.
Imaginary kxx vs. ao
I
1.5
D/)I
20
25
2D
0
M
--
-i102.4
_
M'
-- - --
m~
M
A
o
V56
M
,
m'=(
256 ,
'Z
m
W=toa4
lncreastn
-freqLtenc
_
rw)
(neu>O
Ax
1-7
)
6 - =6.
,-
A x=20.
S
33
Loit
= 5.
,
AX=2.5
incyeas(
n q
YVodLicd-onL )
77 W
M-AL~$PAC~
0.51-
0.0
U.tj
^-
-II
Figure 3.13.
k
vvs . ao
-
1. 5
2. .5
0-
RI
oC.
xI
*1
U-)
LO0
-
x
UL-
CI
o
M
-~M
A
o.S
2:5 6o ,m'
17 ,AAx
s,
1 02.4, m' Z 1'7
'.
'=
5L , yyl
x
=20
M 10'-4, m'= 33 , b'>( = 2.S
2.o
1.0
Dimensov\est
Figure 3.15.
-. 1
S.
S.
k
regue-ncJ
vs. ao
-
7UJ-
I
__
QS
x
f.0
01
x
'eA'i
W
G F G -Re (xx
-- - -.- G FxI
G F,
0/o --G---o.4
'^
RALF S PA CE
G - Im=
roo
I.xx)c
O'
Loco AN1> waS-MN
6>4TRAPOLATE-D
PRINc(RLE- .
i NG
9-
coaRCeseoNCo
ce
ot
0O
0.2.-A
O.G
a,
Figure 3.16.
Comparisons of Fxx with Known Solutions
.
KOc.K
2
G~R
0
LL
LuCo AND
=G i?2- .1
cF99
VESTMANN
FYATRAPOLATeDe
?R1 NcI PLE
(D
CF ,9)
FGS-Re
Gz
coKESePo-OGNc 0
.4
U
E
0
0.2
.0
o.G
0.4
Figure 3.17. Comparisons of F #with
FA.i
Known Solution
cG
60
However, for higher frequencies the (Ax = 10, n = 9) curve
becomes smooth and coincides with the (Ax = 24, rn' = 5).
For fre-
quencies higher than 12 cps the (Ax = 20, m = 5) deviates significantly from the (M' = 1024, Ax = 5, m
=
17) curve, which covers the
same x distance, but with closer-spaced points, and thus is more
accurate.
However, the (M' = 256, Ax = 5, m
differs from the M
=
1024 one.
=
17) curve very slightly
This indicates that for high frequen-
cies (20 - 40 cps) the important parameter is the spacing between the
points and not the total covered length along the free surface.
The
above concepts are illustrated in Figure 3.10.
The need to change the number of points under the footing, and
hence their spacing Ax, as the frequency increases, led to imposing a
criterion of "good reproduction" of the motion; as it was disclosed
from the previous discussion 8 points per wavelength are sufficient
for this purpose.
That is,
Ax< -88f
5
or, using dimensionless frequency,
a
or
_B
2rfB
..
m = 4
total number of points under the footing
m =8
7IT
+ 1.
Some typical values are:
a0
m
0.5
1.0
1.5
2.0
5
9
13
17
The computer program was implemented so as to automatically
increase the number of points under the footing as the frequency
under consideration surpassed the above limit.
Figures 3.11 and
3.13 show the points obtained by the modified program. The total
number of points, M
,
for small frequencies.
taken as 1024 points.
is of relatively secondary importance, except
In this research it has been, almost always,
512 or even 256 points would give almost as
good results.
3.lb
Comments on the curves
Figures 3.16 and 3.17 show dimensionless flexibility functions
vs. a0 , as well as a comparison with solutions by Luco and Westman.
Figures 3.11 to 3.15 show stiffnesses versus a .
The horizontal flexibility starts from an infinite value at
zero frequency (static solution), decreases very rapidly with frequency
up to a
= 0.47T - 0.57, and continues to decrease very slowly there-
after. The Luco and Westman
solution, which was extrapolated by use
of the correspondence principle, gives very similar results.
The rocking stiffness starts with a value 2.35, which is in
good agreement with the one computed from the formula:
k
GB2 =2i
2
-2lv
x (--.3
2x(10)
=
2.25
(static solution)
Then it decreases almost linearly up to a frequency a0 ~ r, and thereafter it has a constant value.
The rocking compliance agrees well
also with the Luco and Westman solution.
3.2
3.2a
Layer on Rock
Effect of number of points and of their spacing on the stiffness
functions
A very important parameter in the dynamic response of the rigid
footing on a layer of soil is the H/B ratio, as will be further illustrated in this chapter. Due to the increase of the actual width of
the footing by Ax (or of the "equivalent" width by (,fn(m+O.5)
the H/B ratio is different for different Ax.
comparison of two cases:
Ax = 10).
- m) Ax),
This is clear from a
1st, (M' = 1024, Ax = 2.5) and 2nd, (M - 256,
The results (Figs. 3.18, 3.20) are significantly different
even for very low frequencies, despite the fact that the total length
covered in the x direction is the same in both cases.
In order to maintain the same geometry for a given ax, the thickness H of the stratum should be modified so that
3.0
-0
2.0 +
-f-rY
x/
/
:/1
(
V////////
s'OC
-440+
7x
C+-
ao /Jt
Figure 3.10.
Layer:
kxx vs. ao
~5CKI NG
I/iL
/
L11I
4.O-
/G
7n7 17
711
RIG-
m=2s6 m
0
-
0-
-0-
K26
3.ol-
'= 5 (g
024m
R
I=S C-Bl (G
= .)
12(C4
l.
)
u.
10
LL-
Z.0-
-
1.01-
kf
0.0
/GB
04
O.Z
0.4
a.
JC
Figure 3.19.
Layer:
kog vs. ao
/RG
c
F-iC)
.5
=2sG) mI
- 1.oo 5
M
1024
(A la 17O/n
-R9 (: -x9) /ci P,
LL
a2
.4
.o
0-
Y// /////\77 -
<2
c~.L .31C
-1U
I
my
R0G1
LL
.21-
(tis K.it
o so
V
-1-i
(J)
-
-
-~
CLO
.01
0.0
O.4-
Figure 3.20.
Layer:
k
vs. ao
R OC K
.%
H
B
1+
_ H
B
_ constant for all
m'
and Ax.
After the modification, the (256, 10) curve was only very slightly
different from the 1024, 2.5) one.
3.2b
Layer on a rigid rock
In terms of stiffness and flexibility functions, the halfspace
and the elastic layer resting on rigid rock differ in two ways:
-
First, the static stiffness increases due to the presence of
the rigid rock, so that at frequencies near zero the displacement f or fzz has a-ffiite value instead of being infinite.
-
Second, in the case of the halfspace, the vertical radiation is
large, especially at low frequencies, and slightly decreases
with increasing frequency. This leads to smooth response curves,
plotted against frequency. In other words, there are no resonance phenomena in the case of a halfspace. In the case of a
stratum over a rigid medium, however, there is no radiation damping at low frequencies, since the generated body waves reflect
on the rigid rock, propagate upward, reflect at the free surface
or the footing, and go downward and so on, until they decay due
to the internal damping of the soil. As a result, there will be
certain frequencies of vibration at which resonance occurs. At
these resonant frequencies, the motion tends to infinity for zero
internal damping, because no energy is required to sustain the
motion and the vibrating footing continuously transfers energy
to the soil.
These frequencies can be predicted approximately by the theory
of one-dimensional amplification, according to which the natural fre-
68
RIGID
Foo-TlNG
\OO.
?e
t
0. .40
V
RICT ID Rk cK C t<\\'4
Fi
are
.
LA' ER o F
SO(L
oN (2.ICrID
2= Mode
FiT
.7 .
T
NArURAL
E
Ro c K
r-
Mode
-b AMPL(FcA~T ONMObES
OF
\l(BRA-TloN,
142.2
Yd I .- =-Y
-r
- o o.
o.4
RIGID
c__
0
=0 5
-
ROCK
.osx~
_
GsooG
G F G Re(F
- -- -G
swoo
ct 0
Figure 3.23.
Fxx vs. a0 (Smooth and Rough)
F '/
= G Imn (Ex)
I\
24
RocKIN C
V)=o
Ior-
S
GB'
\D
0-
4 YOC+'
Q
o+A
0.91i
GB2 F ('rou'"
LLL
{ooing )
4(oo4c)
Qoo~
"s&v'Aool"
oJ
o..
.4t-
-
/1'
0.2--
4,
0.2.
0.4
/
aO
SF
Figure 3.24.
F
vs. ao(Smooth and Rough)
0. r
0.
i
o)= I
~ .U
.0 ~
y 00
2-Boo
eQF
cr b F
rouL
s--=
"Soo"
-
oo
ID
- 0o
z7
-. 05
srmooW
0.4
a.O
SL
Figure 3.25.
F
vs. a (Smooth and
Rough)
R=2
i
4d
MLI
-
.28
+
.
smootk'
oo.4-
-. IG
Fi
U
/
d
/
K
GFa
0
x
c.o
Figure 3.26.
(S.
Fz vs. ao (Smooth and Rough)
-
-C=.oo. KO
. v=o.4
RIGID
-j
YYL
ROCK
73
quencies of a stratum coincide with the natural frequencies of vibration of a shear beam of soil having length equal to the depth of
the layer, fixed at the bottom and free at the top.
For shear waves the natural frequencies are:
C
f
Cs
with
s (2n
=
A/p
=
-
=
n = 1, 2, 3,
1),
shear wave velocity.
For longitudinal (dilatational) waves they are:
C
(2n -
=
C = S+ 2G
with
n = 1, 2, 3,
1),
2(1-v)
1 -2V
=CS
Figures 3.23, 3.24, 3.25, and 3.26 show the compliance functions fx,
f
,
f0, fzz for the case of a layer with C5
=
y = 100 pcf, v = 0.4, and H/B = 2. An internal damping 6
800 ft/sec,
=
5% of
critical was taken for the soil layer in all the cases studied. f
has three peaks within the studied range of frequencies, 0 < ao = Tr
The maximum peak occurs at a frequency a /Tr = 0.24, or
a /Tr
r
- C
_
2B
0.24 x 800
40
which is almost the same as the
fs
_
4800
1st
=
5
=
natural frequency of the stratum
cps.
At frequencies lower than 4.8 cps, the imaginary part of the
fxx has very small values, corresponding to the internal damping
of the soil, since there is no radiation in this range of frequencies.
Just above the resonant frequency the radiation damping significantly
increases due to Rayleigh waves which carry away most of the energy
transmitted to the soil.
A second resonant frequency at a0/Iz 0.58 corresponds to the
propagation of dilatational waves
a
ls
21
)=0.24)(
2
'_'"Av1
0.4)
- 2 x 0.4
~
0.588
The third peak at a/r = 0.72 corresponds to the second natural
mode of shear vibration of the soil
Tr
Similarly, f
= 3 x 0.24 = 0.72
has a peak at a frequency somewhat less than the
natural vertical frequency a1 , since rocking is influenced primarily
by dilatational waves and secondarily by shear waves.
a less narrow peak compared with the f
.
This leads to
For higher frequencies both
real and imaginary parts have values which are almost constant (i.e.,
they are independent of frequency).
The cross-compliance function f
At a
= 0.48Tr
and a
the second negative.
is negligible for a
0.4r.
= 0.571T , it has two peaks, one positive and
The vertical displacement function fzz shows three peaks at
a0 /Tr= 0.44, 0.58, and 0.65.
sponds to the
1st
The second resonance apparently corre-
vertical mode of vibration.
The first, which
reaches a much higher peak, is due to an unknown combination of Sand P-waves, and cannot be predicted by the one-dimensional theory.
The same can be said for the
3 rd
peak which is negative.
Generally speaking, the motion is a complex combination of
waves and cannot be completely predicted by the one-dimensional theory,
which only predicts some of the resonant frequencies.
3.2c
Layer on elastic rock
It is interesting to examine the effect of the rigidity of the
rock on the dynamic response of the foundation.
The case of an in-
finitely rigid rock (Csrock = oo) has been examined in section 3.2b.
Two other cases were run with Cs = 3200 ft/sec (stiff rock) and C
5 =
1600 ft/sec (medium stiff rock). The results are presented in Figures
3.27 to 3.40.
As expected, the peaks of the flexibility curves are lower and
wider than those of the rigid rock case, due to the radiation of energy
from the soil stratum into the rock. The resonant frequencies, however,
change only very slightly.
Figures 3.27 and 3.28 show the real parts of the f xx and fog functions for the cases of halfspace (1), layer on rock with Cs = 1600 (2),
layer on rock with Cs = 3200 (3)and layer on rigid rock (4).
x
C
H
2
Cr
(hafspace)
0
s
0.2.
0.4.
CLO
Figure 3.27.
:rt
Influence of Rock Flexibility on Fx VS. ao
L.0jLl
Cr
-z -
.4
-oEi=
C;s
C',S
Wo.6
Q)
o .
U-S
0.4
0.0o.2
Figure 3.28.
0 .6
Influence of Rock Flexibility on FQvs. a0
o
The "static" part of the swaying flexibility (f ) very
xx
slightly increases as the Cs of the rock decreases from co to 3200 ft/
sec.
For smaller Cs(1600), however, the flexibility tends to infin-
ity, being a little smaller than the halfspace one.
The peak at the
=
1st
resonant frequency of the curve (3) (Cs
3200) is 33% lower than that of the curve (4)rigid rock), this
k
being the most important effect of the elastic over the rigid rock.
In the case of Cs = 1600 (2), this peak has been very much suppressed
and the subsequent valley flattened.
The second resonant frequency has been decreased in the case
(3)to the value of a
=
0.5r (contrasted to the 0.58r), which implies
0
less participation of the dilatational mode of vibration.
This was
expected since the P-waves propagating downward are partially refracted in the elastic rock, and therefore they do not contribute to the
vibration of the foundation.
The third peak almost disappears, and
at higher frequencies the flexibility is practically zero.
The curve
(2)does not exhibit even the 2nd peak and is generally very flat,
being more like the halfspace curve (1)than the rigid rock one (4).
The rocking flexibility is much less influenced by the rigidity
of the rock.
Curves (3)and (4)are almost identical to (2)except
for the peak, which has very slightly shifted to the left.
Curve (2)
has a very smooth peak at resonant frequency a0 = 0.4r (< 0.477r of the
rigid rock or 0.45r of the stiff elastic rock), which means even less
participation of the dilatational mode in the vibration of the footing.
The flexibility to vertical vibration changes greatly as the
stiffness of the rock decreases.
The static compliance tends to
infinity instead of having a finite value (0.165). The second peak,
corresponding to the vertical resonant frequency, completely disappears, and the third negative peak is very much suppressed. The
first peak shifts towards the left but decreases much less than the
second and third ones.
The explanation is again the transmission of
vertical P-waves in the rock and the lesser participation of the
vertical mode of vibration in the resonance. Again, the curve for
not-stiff rock (C = 1600) is very similar to the halfspace one, which
justifies, to an extent, the continuing use of halfspace solutions to
predict the motion.
"Internal Damping"
The effect of decreasing the internal damping of the rock is
shown in Figures 3.29 and 3.30.
Rocking is almost independent of S,
while swaying shows some sensitivity to it. But since the value of
8 = 0.005 of critical, it is unlikely to be so low; it can be concluded that the material damping of the rock is unimportant. The importance of the soil internal damping has been extensively examined by
Victor Chang Liang and was not considered necessary to be reinvestigated in this work.
"Smooth" versus "rough" footing
In the case of a rigid disk perfectly bonded to an elastic layered halfspace, stresses and displacements are continuous at the inter-
face between disk and soil.
This problem is commonly referred to
as the complete mixed boundary value problem ("rough" footing).
The solutions presented so far are solutions to the complete problem.
If it is assumed that at least one of the components of surface traction at the interface is zero, then a relaxed boundary value
problem ("smooth" footing) results.
The relaxed problem, extensively
studied so far, assumes that for vertical and rocking vibrations the
contact surface is free of shear stresses, while for horizontal vibrations the contact surface is free of normal tractions.
Consequently,
the horizontal displacements under the disk are unconstrained for
vertical and rocking vibrations, and the vertical displacements are
unrestrained for horizontal vibrations.
Veletsos and Wei and Luco and Westmann have obtained numerical
results for this relaxed problem ("smooth" footing).
With the program
developed based on the above (chapter 2) formulation, both the "smooth"
and the "rough" footing cases can be studied.
The flexibilities of a "smooth" foundation on a layer of soil
resting (1)on a rigid rock and (2)on an elastic rock with Cs = 1600,
are compared with the ones of a rough footing(Figures 3.37, 3.38, and
3.23 to 3.26).
In the case of a layer of soil on a medium-soft rock, the difference between "smooth" and "rough" is very small.
Only the imaginary
part of the rocking shows a little higher peak (at dimensionless frequency a0/7r = 0.5), while the swaying (real + imaginary) curves are
almost identical.
In the case of the soil on the rigid rock, however, the rocking flexibility of the "smooth" footing showed much higher peaks
in both real and imaginary parts. The sliding flexibility, however,
is virtually the same.
Large depths
For large depths of the soil stratum and very small Ax (which
is required for a good reproduction of the motion at high frequencies),
the factor g = eihnH, encountered in the "Bottom" matrix, becomes
very large.
Indeed, since
h = -/
g = exp
-i
n =\1-
1 - 12 H)-
12
exp (i
({)2
and as H/Ax surpasses some certain limit, g becomes very large, leading to an overflow.
The explanation of this is that for high frequencies the wavelength is small and decays at very shallow depths.
Thus, the exist-
ance at a large depth rock does not influence the motion of the footing.
This explanation is the basis of the correction made. After a
certain H of the soil stratum, such that the H/Ax ratio exceeds a certain value, the soil profile is modified by considering (elastic)
rock below this depth.
I
CFJ')
GRe
GI
procI
0.6
-
C
/
I/
//
/
0.4
0.2
.s
CFCKX,
Fx
G
r
(,%
/
\
I
\
/
N
\
0.0
0.0
Y'Ay-=
0.2
0.4.
CLo
3t
Figure 3.29.
Fxx vs. ao (Cr/Cs)
=
4)
lo-O
-f
83
=z2
N-
Gz. Re(Fq)
G
-I
PCF9)
-=o.o
O.GF- k
0.4
-
d
6
r,= 0.05
0.2.t/
/
/
/
-
0.0
C.005
u.q.
o*G
Cr o
Figure 3.30.
F4 vs. a0 (Cr/Cs
=
4)
Roc4K
IG
- SWAY[MG
.15
.t-s
---
GT-CFC
cL
00.
ROC..K
.05 -
CL7.00
-. 05
/
.10o
F-o
Figure 3.31.
F
/
0.12
vs. a0 (Cr/Cs
=4
.4
/
=-2.
- I00
/
-'
-
=040-
ELASTIC ROCK
c=
QJB
GF
azoo.
=CG Re (Fz
G Fz"= G I
0
d
-i-
.0
.12
00(
0. G
0.4
CLr
Figure 3.32.
F7z vs. a0 (Cr/C
=
4)
CFz)
IL-z
~~iKJ)/G
CSSoo.
=0-05S
oV.40.
-LASTIC
cs
V
Szoo.
o.30
U)
0.4
Figure 3.33.
k
vs. a0 (Cr C
=
4)
LO-o(I3t
ROCK
f -=-0,
R.0QkrdG
-=,2
-I
0
riY77---O
~0
'O
10.4
A-
ELASTIC
ROCK
30.
clJ
cs~3zoo.
p
0oos
v = 0.30
3. -
Re (k
9)
-S7
/cdE
0
U
Ir~4 (k~/G~
Z~. ILV
(I)
F.
-7
ar
04
0.0
Figure 3.34.
k
vs. a (C r/Cs = 4)
o
OO/J
.S r-
I4
Z5
-
e
OO.~~
-
ELASTic Rock
c5=zoo.
0
o.
C32I0
0.5t-
bO
50
0
os
co
I-T
si
c)
700
0.0
V)K
ReGI
-0.51CA)
- 1.0 1--
""0.4
0.4
Clo
0.2
Figure 3.35.
k0vs. ao (Cr/Cs =4
(
6
-
IC8
6
~zN
-:' =2
.4
+
~J
4
(kz')/G
ii
Re
N
-TIk
-2
-4
-61
a. I J
Figure 3.36.
kz vs. ao (Cr/Cs =4
) /G
Io.
07WAN7
t
,X
0.-
CTGF
II-----
F77nm77/?l
G-ReCFJ
G F 4 V G xF
=28B
~'
II.
xx
Y,
0.-
5-
GFfor G o MC,
0.6 ---
oo
c,='3Oo.
ELASTIc
02
Nlao
c 130
.
~=0.0S
ROCKt
=0
.0
-9j
Li-
0
..
t
---
U
040
s
0.0
moo"
0.2.
0.4
Figure 3.37.
F
o<
0 -.
vs. ao (Cr/Cs
=
2)
LLG~
4-
2
'I
0~
Yt
GB?-S
0-
-
-e
2Im
0
,ZB.
e -FGf)
Y 100.
(F )
-
G z. Re
CF,4)
G B2 - _I v (99)
U
C"s wo o H
Q"svok&
f O L\q )
LAST~C
ROCK
{oUA')
(
0Ioo.
jS
Goo.0-0
4N
o
//
/7
/7
7
0.2.
0.0
Clo
Figure 3.38.
F
vs. a0 (Cr/Cs = 2)
~
c--o
ROCKING -s
AAY
ING
V7~/wtAYo
.10
RThe (1F4-
:
-
. )
-
GB
-cy Koo.
ELASTIC
ROCK
--
-V . o
.051
0
.00
7
-.
7
051
0.0
0.2.
0.4
Figure 3.39.
F
0.6
vs. a (Cr/Cs = 2)
O.S
li
y=O.40.
U+
0LASTIc
Rloc <
0.2
U-
cs= Meoo.
,v = 0.30
/
0
(I
N
U-
0
C
GFz/
7-
U
1-7
UV
U
GFz
0
0.0
0-R
Figure 3.40.
Fz vs/ ao(Cr/Cs = 2)
=o.os
CHAPTER 4 - RECTANGULAR FOOTING
4.1
Formulation
The differential equations of motion
( 22E ++
(+2G)
(x+G)
_
+ 2E
2+---
2E
(32
3x
ay
zat
32
G
2 +
3y
3x
-p2
32E
32
2
2 +
32
2
/
~
at2
t1
can be directly solved for u,v,w for any layer of soil.
u = (L [A'eihnz+ A"e- ihnz
v = (-[A'eihnz+
Ae-ihnz
+ [B'eikn'z+B"e-ikn'z
ei(wt-hx-hmy)
+ [Cleikn'z+ Ceikn'z)
ei(wt-hkx-hmy)
D"e ikn'zi) ei(wt-hx-hmy)
W= (n -A'eihnz+A"e- ihnz + [D'eikn'z+
with
92 + m 2 + n2 =1
A'2 + M'2 + n'2 _
h
m
p
k
_=2
s
B'k' + C'm' - D'n' = 0
B"
+ C"m' - D"n' = 0
FiGrEu
4.j.
SYS-TEM
OF
FORCES
CORRESPONDING
or-
VIBRATION
TO
, MoMENTS
THE
MoDas
CONsITDRep .
x
u D
kL-o~
-VL
TOTAL NUM5P,
_
F
_
m
vy
_
_
_
__
~I
P%
4
W
-J
14:
YTAY-1
F~cxuRtC 4.2..
'TPANSF-o?JA
UND-R
TikE
GRID
AND
UsrGD
FOP, -THE
ThIe FL6)q~lLlT'Y
FooTItACr
EVA LU)AT toN
OF
7HE Voutlg~~
COGEFF'ICICeNrS foe PotiJTs
The boundary conditions at the interface between any two successive layers leads to the conditions
=kp+l
= k 2' =h +9+
h
p+1 p+1
p p
pp
9,
p+l
m' =hp+l mp+l =k p+1 m'
hm =k
p+l
pp p p P
and after elimination of the intermediate layer matrices we get:
C
u
=Q2 Q
v}
(2)
x
w
Ty
in a quite similar way as in the two-dimensional case.
For a unit pulse (normal or shear) applied at the origin of
the coordi
tes on the free surface, it is sufficient to write
a(x,y) = I
4Tr
with S(EC) =
f' fS(§,C) e1
CO
J
-00
e'iy dE dC
00
0 c(x,y) e~
e- y dx dy
-00
and similarly to T (x,y),
Ty(x,y).
For a particular set of E and
C, one can solve equation (2)
after setting for each layer:
h k = k 1
= -
h.m.
33
=
=
k.m.
m
33
-C
Thus
u(5C
s(,C)
v=
or
U=
Q22 ( 9
'
Ql2
S(C
and by the Fourier Transformation
ey d dc
(2,C e
{U(x,y)} =
47T
-0
the displacements at the free surface are obtained.
The formulation for the rigid footing, thereafter, is quite similar to the one for the strip footing. The only difference is that
at any given normal or shear stress on a point there correspond three
displacements and thus the flexibility coefficients are 3 x 3 and not
2 x 2.
Thus, finally:
u
1
v
=
F
F
0
0
0
0
P
F
F
0
0
0
0
M
0
0
0
0
M
y
0
0
F
yy
F
yc
,
P
y,
$
0
22*2
w
0
0
0
0
Fz
0
Pz
e
L 0
0
0
0
0
Ft
Mt
F
0 F
2
where
F,
9
, F
=
S1
F , Fyp Fq p
'y2 2 2
''
=
swaying & rocking flexibilities in the
xz plane
swaying & rocking flexibilities in the
yz plane
Fz = flexibility in vertical translation
Ft = flexibility in torsion.
4.2
Results
Effect of number of points
Figures 4.3 and 4.4 show the dimensionless stiffness functions
k
, kz, kt versus dimensionless frequency a0 = wB/Cs
of a square footing resting on an elastic halfspace.
in case
The total number
of points as well as the number of points under the footing are taken
much smaller than those of a plane footing (strip), because otherwise
the capacity of the IBM 360 is surpassed.
Two kinds of curves are shown. The total number of points is 64
in each direction (64 x 64).
The number of points under the footing
is taken as 5 (solid curves) or 3 (dashed curves) with the corresponding
x equal to 10 or 20, respectively. As expected, according to the
theory presented in Chapter 3, the dashed curves are less wavy than
the solid ones and, apparently, more accurate.
Static spring constants
According to the so-called correspondence principle, it is always
possible to write the stiffness functions as
K = K (k + i a C) (1 + 2i B)
100
where Ko is the real part of the stiffness function in the static
case (static "spring constants") and k, c are the stiffness and viscous damping coefficients, functions of the frequency a
That is,
K0 =Re [K(w = 0)]
o
eK( = 0
a0 m k(w = 0)
The halfspace solutions are
28GR v
Kxo
= 3 R
K
4GR
K
Kto
=
3
swaying
rocking
vertical translation
torsion
In case of a rectangular footing, the equivalent radius is given
by:
R = 2B
_ 2B
for translation
for rocking and torsion
and thus dimensionless static spring constants are:
101
KX/GB
= 5.15
K /GB3 = 5.26
Kzo/GB
= 6
Kto/GB 3 = 7.9
The corresponding values which were found are:
and 11.0 respectively.
5.60, 6.50, 6.50
The difference is rather small for such a
small number of points except for the torsion.
Etr'l2B)s
Z
10. t-
Ka Spckce.
Re(ecc/Gai
VI
Li..
Nf
=G4
M,'=
G-4,
L~. VJ*
5
Yfl
my=
.1
='20.
-5
0.2
0.0
D ime5jones5 F requ.e.n~ 7
Figure 4.3.
k
and k
Z
0.-
7 .
vs. a0
0.3
,
8)4-. ay
m )(
(D
5.--B
L
1
/
10.
0
5
I
I
0.0
0.1
imension less
Figure 4.4.
0.3
.2
Freq u e -Acy
ao /x
kt and kz vs. a0
=
t
v Vr
--
104
SUMMARY AND CONCLUSIONS
The response of a rigid strip or rectangular footing resting
on a layered soil stratum was studied.
Results were given in terms
of dimensionless compliance (flexibility) or stiffness functions
versus dimensionless frequency.
Each layer of soil was assumed to be
homogeneous, isotropic and linearly viscoelastic (theory of "equivalence").
The layers were considered to be welded to each other, and
the footing to be welded to the soil surface. Thus tensile stresses
between footing and soil could be developed.
The solution presented was based on direct integration of the
differential equations of motion while satisfying the boundary conditions at the interfaces and at the surface.
The complexity of the
latter was overcome by using a fast Fourier transform for a unit load
pulse under the footing and then integrating over the width of the
footing while imposing the conditions of rigid body motion. All the
possible modes of vibration can be handled with this method; horizontal
(both directions) or vertical translation and rocking (both directions)
or twisting were studied.
The effect of the number of isolated points by which the free
surface was represented and of their distance was studied first.
It
was shown that the required number of points for a good solution, as
well as their distance, are functions of the shortest (shear) wavelength. A number of 8 points per shear wavelength was found to be sufficient for a good solution.
105
The results for a halfspace are compared with known analytical
solutions. The agreement found was very good.
The effect of the rigidity of the rock on which a layer of soil
rests was primarily investigated. There is a considerable change in
the response curves as the rigidity of the underlying rock decreases
from o to some value of 20 times the rigidity of the soil above it.
The peaks at the resonant frequencies decrease or even disappear
(higher modes.).
The solution converges to the halfspace as the shear
wave velocity of the rock approaches the one of the soil.
The effect of the "smoothness" of the footing was then studied.
"Smooth" footing is one in which the secondary stresses in the contact
area between footing and soil are neglected (relaxed boundary conditions).
Only in the case of a layer of soil on a rigid rock is this
effect important, and only for the rocking vibration.
For an elastic
rock this effect becomes less and less important as the stiffness of
the rock decreases.
There is only one case of change in the internal damping of the
elastic rock which was studied. The effect was not important, except
for the swaying at the first resonant frequency (Cs/4H).
106
References
1. Agabein, M.E., Parmelee, R.A., and Lee, S.L., "A Model for the
Study of Soil-Structure Interaction," Proc. Eighth Congress of
the Intl. Assoc. for Bridge and Structural Engng., pp. 1-12, New
York, 1968.
2. Ang, A.H.-S, and Harper, G.N., "Analysis of Contained Plastic
Flow in Plane Solids," Journ. Engineering Mechanics Div., ASCE,
Vol. 90, No. EM5, pp. 397-418, 1964.
3. Arnold, R.N., Bycroft, G.N., and Warburton, G.B., "Forced Vibrations of a Body on an Infinite Elastic Solid," Journ. Applied
Mechanics, Trans. ASME, Vol. 22, No. 3, pp. 391-400, 1955.
4. Awojobi, A.O., "Approximate Solution of High-Frequency-Factor
Vibrations of Rigid Bodies on Elastic Media," Journ. Applied
Mechanics, Trans. ASME, Vol. 38, Ser. E, No. 1, pp. 111-117, 1971.
5. Awojobi, A.O., and Grootenhuis, P., "Vibration of Rigid Bodies
on Semi-infinite Elastic Media," Proc. Royal Soc. London, Ser. A.,
Vol. 287, pp. 27-63, 1965.
6. Baranov, V.A., "On the Calculation of Excited Vibrations of an
Embedded Foundation," (inRussian) Voprosy Dynamiki i Prochnocti,
No. 14, Polytechnical Inst. of Riga, pp. 195-209, 1967.
7. Beredugo, Y.O., and Novak, M., "Coupled Horizontal and Rocking
Vibration of Embedded Footings," Canadian Geotechnical Journal,
Vol. 9, No. 4, pp. 477-497, 1972.
8. Bland, D.R., The Theory of Linear Viscoelasticity, Pergamon Press,
1960.
9. Bycroft, G.N., "Forced Vibration of a Rigid Circular Plate on a
Semi-infinite Elastic Space and an Elastic Stratum," Phil. Trans.
Royal Soc. London, Ser. A., Vol. 248, pp. 327-386, 1956.
10.
Chakravorty, M.K., Nelson, M.F., and Whitman, R.V., Approximate
Analysis of 3-DOF Model for Soil Structure Interaction, Research
Report 71-11, Dept. of Civil Engrg., MIT, Cambridge, Mass., June
1971.
11.
Chang-Liang, Victor, "Dynamic Response of Structures in Layered
Soils," Ph.D. thesis, MIT, 1974.
107
12.
Dimaggio, F.L., and Bleich, K.H., "An Application of a Dynamic
Reciprocal Theorem," Journ. Applied Mechanics, Trans. ASME,
Vol. 29, pp. 678-679, 1959.
13.
Elorduy, J., Nieto, J.A., and Szekely, E.M., "Dynamic Response
of Bases of Arbitrary Shape Subjected to Periodical Vertical
Loading," Proc. Intl. Symp. on Wave Propagation and Dynamic
Properties of Earth Materials, Univ. of New Mexico, Albuquerque,
pp. 105-121, 1967.
14.
Fleming, J.F., Screwvala, F.N., and Kondner, R.L., "Foundation
Superstructure Interaction under Earthquake Motion," Proc. 3rd
WCEE, pp. 1-22, to 1-30, New Zealand, 1965.
15.
Fung, Y.C., Foundations of Solid Mechanics, Prentice-Hall, 1965.
16.
Gladwell, G.M., "Forced Tangential and Rotatory Vibration of a
Rigid Circular Disc on a Semi-infinite Solid," Intl. Journ. Eng.
ineering Science, Vol. 6, No.10, pp. 591-607, 1968.
17. Gupta, D.C., Parmelee, R.A., and Krizek, R.J., "Coupled Sliding
and Rocking Vibrations of a Rigid Foundation on an Elastic Medium,"
Tech. Report, Dept. of Civil Engng., Northwestern Univ., Evanston,
Ill., 1972.
Rocking and Sliding Oscillations of
Proc. Intl. Symp. on Wave Propagation
Earth Materials, Univ. of New Mexico,
1967.
18.
Hall, J.R., Jr., "Coupled
Rigid Circular Footings,"
and Dynamic Properties of
Albuquerque, pp. 139-148,
19.
Hsieh, T.K., "Foundation Vibrations," Proc. Institution of Civil
Engineers, Vol. 22, pp. 211-226, 1962.
20.
Iljitchov, V.A., "Towards the Soil Transmission of Vibrations
from One Foundation to Another," Proc. Intl. Symp. on Wave Propagation and Dynamic Properties of Earth Materials, Univ. of New
Mexico, Albuquerque, pp. 641-653, 1967.
21.
Jones, T.J., and Roesset, J.M., Soil Amplification of SV and P
Waves, Research Report R70-3, Dept. Civil Engng, MIT, Cambridge,
Mass., Jan. 1970.
22.
Karasudhi, P., Keer, L.M., and Lee, S.L., "Vibratory Motion of a
Body on an Elastic Half Plane," Journ. Applied Mechanics, Trans.
ASME, Vol. 35, Ser. E, No. 4, pp. 697-705, 1968.
108
23.
Kausel, E., "Forced Vibrations of Circular Foundations on
Layered Media," Ph.D. thesis, MIT, 1974.
24.
Kobori, T., Minai, R., and Suzuki, T., "The Dynamical Ground
Compliance of a Rectangular Foundation on a Viscoelastic Stratum,"
Bull. of the Disaster Prevention Research Institute, Kyoto Univ.,
Vol. 20, pp. 289-329, Mar. 1971.
25.
Kobori, T., Minai, R., Suzuki, T., and Kusakabe, K., "Dynamical
Ground Compliance of Rectangular Foundations," Proc. Sixteenth
Natl. Congress for Applied Mechanics, 1966.
26.
Kobori, T., Minai., R., Suzuki, T., and Kusakabe, K., "Dynamic
Ground Compliance of Rectangular Foundation on a Semi-infinite
Viscoelastic Medium," Annual Report, Disaster Prevention Research
Institute of Kyoto Univ., No. llA, pp. 349-367, 1968.
27.
Kobori, T., and Suzuki, T., "Foundation Vibrations on a Viscoelastic Multilayered Medium," Proc. Third Japan Earthquake Engng.,
Symp., pp. 493-499, Tokyo, 1970.
28.
Krizek, R.J., Gupta, D.C., and Parmelee, R.A., "Coupled Sliding
and Rocking of Embedded Foundations," Journ. Soil Mech. and Foundations Div., ASCE, Vol. 98, No. SM12, pp. 1347-1358, 1972.
29.
Kuhlemeyer, R., Vertical Vibrations of Footings Embedded in Layered Media, Ph. D. thesis, Univ. of California, Berkeley, 1969.
30.
Luco, J.E., and Westmann, R.A., "Dynamic Response of Circular
Footings," Journ. Engng. Mechanics Div., ASCE, Vol. 97, No. EM5,
pp. 1381-1395, 1971.
31.
Luco, J.E., and Westmann, R.A., "Dynamic Response of a Rigid
Footing Bonded to an Elastic Half Space," Journ. Applied Mechanics,
Trans. ASME, Vol. 39, Ser. E., No. 2, pp. 527-534, 1972.
32.
Lycan, D.L., and Newmark, N.M., "Effect of Structure and Foundation
Interaction," Journ. Engng. Mechanics Div., ASCE, Vol. 87, No. EM5
33.
Lysmer, J., Vertical Motion of Rigid Footings, Dept. of Civil Engng.,
Univ. of Michigan, Report to WES Contract Report No. 3-115, 1965..
34. Lysmer, J., and Kuhlemeyer, R.L., "Finite Dynamic Model for Infinite Media," Journ. Engineering Mechanics Div., ASCE, Vol. 95,
No. EM4, pp. 859-877, 1969.
109
35.
Lysmer, J., and Richart, F.E., Jr., "Dynamic Response of Footings
to Vertical Loading," Journ. Soil Mech. and Foundations Div.,
ASCE, Vol. 92, No. SMl, pp. 65-91, 1966.
36. MacCalden, P.B., and Matthiesen, R.B., "Coupled Response of Two
Foundations," Paper 238, Proc. 5th WCEE, Rome, 1973 (inpublication).
37.
Meek, J.W., and Veletsos, A.S., "Simple Models for Foundations in
Lateral and Rocking Motion," Paper 331, Proc. 5th WCEE, Rome,
1973 (inpublication).
38. Merritt, R.G., and Housner, G.W., "Effects of Foundation Compliance on Earthquake Stresses in Multi-story Buildings," Bull Seism.
Soc. Am., Vol. 44, No. 4, pp. 551-570, 1954.
39. Novak, M., "The Effect of Embedment on Vibration of Footings and
Structures," Paper 337, Proc. 5th WCEE, Rome, 1973 (inpublication).
40. Novak, M., and Beredugo, Y.0., "Vertical Vibrations of Embedded
Footings," Journ. Soil Mech. and Foundations Div., ASCE, Vol. 98,
No. SM12, pp. 1291-1310, 1972.
41.
Oien, M.A., "Steady Motion of a Rigid Strip Bonded to an Elastic
Half Space," Journ. Applied Mechanics, Trans. ASME, Vol. 38,
Ser. E, No. 2, pp. 328-334, 1971.
42.
Ratay, R.T., "Sliding-Rocking Vibration of Body on Elastic Medium," Journ. Soil Mech. and Foundations Div., ASCE, Vol. 97, No.
SMl, pp. 177-192, 1971.
43.
Reissner, E., "Stationsre, axialsymmetrische, durch eine schtttelnde Masse erregte Schwingungen eines homogenen elastischen
Halbraumes," Ingenieur-Archiv, Vol. 7, pp. 381-396, 1936.
44.
Richardson, J.D., Forced Vibrations of Rigid Bodies on a Semiinfinite Elastic Medium, Ph.D. thesis, Univ. of Nottingham,
England, May 1969.
45.
Richardson, J.D., Webster, J.J., and Warburton, G.B., "The Response on the Surface of an Elastic Half-Space near to a Harmonically Excited Mass," Journ. Sound and Vibration, 14 (3), pp.
307-316, 1971.
46.
Robertson, I.A., "Forced Vertical Vibration of a Rigid Circular
Disk on a Semi-infinite Solid," Proc. Cambridge Philosophical Soc.,
Vol. 62A, pp. 547-553, 1966 .
110
47.
Roesset, J.M., Whitman, R.V., Dobry, R.: "Modal Analysis
for Structures with Foundation Interaction," ASCE Journal of StrucDiv., Vol.99, March, 1973.
48.
Roesset, J.M., and Whitman, R.V., Theoretical Background for Amplification Studies, Report No. 5 on "Effect of Local Soil Conditions
upon Earthquake Damage," Research Report R69-15, Dept. of Civil
Engng., MIT, Cambridge, Mass., March 1969.
49.
Sakurai, J., and Minami, J.K., "Some Effects of Nearby STructures
on the Seismic Response of Buildings," Paper 274, Proc. 5th WCEE
Rome, 1973 (inpublication).
50.
Sarrazin, M.A., Soil-Structure Interaction in Earthquake Resistant
Design, Research Report R70=59, Dept. Civil Engng., MIT, Cambridge,
Mass., Sept. 1970.
51.
Sinitsyn, A.P., "The Interaction between a Surface Wave and a Structure," Proc. Intl. Symp. on Wave Propagation and Dynamic Properties
of Earth Materials, Univ. of New Mexico, Albuquerque, pp. 521-527,
1967.
52.
Thomson, W.T., "A Survey of the Coupled Ground-Building Vibration,"
Proc. 2nd WCEE, Tokyo, 1960.
53.
Urlich, C.M., and Kuhlemeyer, R.L., "Coupled Rocking and Lateral
Vibrations of Embedded Footings," Canadian Geotechnical Journal,
Vol. 10, No. 2, pp. 145-160, 1973.
54.
Veletsos, A.S., and Verbic, B., Vibration of Viscoelastic Foundations, Report No. 18, Structural Research at Rice, Dept. of Civil
Engng., Rice Univ., Houston, Jan. 1971.
55.
Veletsos, A.S., and Wei, Y.T., Lateral and Rocking Vibration of
Footings, Report No. 8, Structural Research at Rice, Dept. of Civil
Engng., Rice Univ., Houston, Jan. 1971.
56.
Waas, G., Earth Vibration Effects and Abatement for Military Facilities, Report 3, "Analysis Method for Footing Vibrations through
Layered Media," Tech. Report S-71-14, U.S.A.E.W.E.S., Sept. 1972;
also Ph.D. thesis, Univ. of California, Berkeley, June 1972.
57.
Warburton, G.B., "Forced Vibrations of a Body on an Elastic Stratum,"
Journ. Applied Mechanics, Trans. ASME, Vol. 24, No. 1, pp. 55-58,
1957.
58.
Warburton, G.B., Richardson, J.D., and Webster, J.J., "Forced Vibrations of Two Masses on an Elastic Half Space," Journ. Applied
Mechanics, Trans. ASME, Vol. 38, Ser. E., No. 1, 1971.
111
59.
Warburton, G.B., Richardson, J.D., and Webster, J.J., "Harmonic
Response of Masses on an Elastic Half Space," Journ. of Engng.
for Industry, Trans. ASME, Paper No. 71-Vibr-59, 1971.
60.
Wei, Y.T., "Steady State Response of Certain Foundation Systems,"
Ph.D. thesis, Rice Univ., Houston, 1971.
61.
Whitman, R.V., and Richart, F.E., Jr., "Design Procedures for
Dynamically Loaded Foundations," Journ. Soil Mech. and Foundations
Div., ASCE, Vol. 93, No. SM6, pp. 169-193, 1967.
62.
Zienkiewicz, 0.C., The Finite Element Method in Engineering Science,
McGraw-Hill, 1971.