Document 11246595
advertisement

Invariant Generators of the Symmetry Groups of
Regular n-gons and Platonic Solids
Thomas Goller
May 2011
This thesis represents my own work in accordance with University regulations.
Abstract
Let G be a finite group of invertible linear transformations of a vector space V of finite
dimension n over a field K of characteristic 0. The elements of G extend to ring automorphisms of K[V ], the ring of polynomial functions on V , by acting as change of variables.
The ring of invariants K[V ]G consists of those polynomials in K[V ] that are fixed by all
the elements of G. A famous theorem states that G is generated by pseudoreflections
if and only if K[V ]G is a polynomial ring in n homogeneous generators. We will give a
complicated elementary proof of this nice result.
Knowing that K[V ]G has n algebraically independent generators is wonderful, but
finding these generators is even better. That is precisely what we will do for the symmetry groups of the regular n-gons in R2 and the platonic solids in R3 . We will study
these symmetry groups geometrically, proving – among other things – that they are
generated by reflections. Then we will use intuitive geometric reasoning to find sets of
invariant polynomials, and finally we will draw on algebraic rigor to prove that these sets
of polynomials generate the rings of invariants K[V ]G .
Acknowledgements
I want to thank my adviser, Professor János Kollár. He suggested this topic, was patient
with my slow progress, and kept me on the right track without seizing control. Best of
all, he had a nice proof for every messy argument I proposed, and an insightful suggestion
each time I got stuck.
Contents
1 Introduction
1.1 Setup and Definitions . . . . . . . . . . . . .
1.2 Major Results . . . . . . . . . . . . . . . . .
1.3 Summary of Notation . . . . . . . . . . . . .
1.4 Simple Examples . . . . . . . . . . . . . . .
1.5 Proving Polynomials Generate K[V ]G . . . .
1.5.1 Step 1: Check the degrees . . . . . .
1.5.2 Step 2: Check n linear independences
1.5.3 Alternate method: field extensions .
1.6 Summary of What is to Come . . . . . . . .
.
.
.
.
.
.
.
.
.
3
3
4
5
6
8
8
8
9
10
.
.
.
.
12
12
13
14
15
.
.
.
.
.
.
.
.
.
.
.
.
16
16
17
17
19
19
20
21
22
22
23
24
24
4 Invariants of n-gon Symmetry Groups
4.1 Finding Polynomial Invariants . . . . . . . . . . . . . . . . . . . . . . . .
4.2 Proving the Invariants Generate . . . . . . . . . . . . . . . . . . . . . . .
26
26
27
2 Geometric Objects of Study
2.1 Regular n-gons . . . . . . . . . .
2.2 The Platonic Solids . . . . . . . .
2.3 Adjacency Graphs of the Platonic
2.4 Dual Polyhedra . . . . . . . . . .
. . . .
. . . .
Solids
. . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
3 Symmetry Groups
3.1 Isometries that Fix the Origin . . . . . . . . . . . . . . . .
3.2 Symmetry Groups of Regular n-gons . . . . . . . . . . . .
3.2.1 Characterization, order, and degree signature of Dn
3.2.2 Dn is a reflection group . . . . . . . . . . . . . . . .
3.3 Symmetry Groups of the Platonic Solids . . . . . . . . . .
3.3.1 Group order . . . . . . . . . . . . . . . . . . . . . .
3.3.2 Number of reflections . . . . . . . . . . . . . . . . .
3.3.3 Degree signature . . . . . . . . . . . . . . . . . . .
3.3.4 Proving the reflections generate . . . . . . . . . . .
3.4 Finite Orbits of Points . . . . . . . . . . . . . . . . . . . .
3.4.1 Action of G on linear polynomials . . . . . . . . . .
3.4.2 An invariant polynomial . . . . . . . . . . . . . . .
1
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
4.3
Further Remarks . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.3.1 Another way to find a generator . . . . . . . . . . . . . . . . . . .
4.3.2 Proving generation with field extensions . . . . . . . . . . . . . .
5 Invariants of Platonic Solid Symmetry Groups
5.1 Half Orbits . . . . . . . . . . . . . . . . . . . .
5.2 Invariants of the Tetrahedral Group T . . . . .
5.3 Invariants of the Octahedral Group O . . . . . .
5.4 Invariants of the Icosahedral Group I . . . . . .
5.5 Proving the Invariants Generate . . . . . . . . .
6 Proof of the Main Theorem
6.1 Setup . . . . . . . . . . . . . .
6.2 Background . . . . . . . . . .
6.3 Main Theorem . . . . . . . .
6.3.1 Proving (i) =⇒ (ii) . .
6.3.2 Proving (ii) =⇒ (iii) .
6.3.3 Proving (iii) =⇒ (i) . .
6.3.4 Proving (ii) ⇐⇒ (iv)
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
2
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
27
27
28
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
30
31
31
32
34
36
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
38
38
38
40
41
41
43
47
Chapter 1
Introduction
1.1
Setup and Definitions
Let V be a vector space of finite dimension n over a field K of characteristic 0. Let K[V ]
denote the ring of polynomial functions on V with coefficients in K. Picking a dual basis
x1 , . . . , xn for V ∗ , we can write
K[V ] = K[x1 , . . . , xn ] = K ⊕ V ∗ ⊕ S 2 (V ∗ ) ⊕ S 3 (V ∗ ) ⊕ · · · ,
where S d (V ∗ ) denotes the dth symmetric power of V ∗ , which in the chosen basis is simply
the homogeneous polynomials of degree d in the xi with coefficients in K. This direct
sum exhibits the natural grading of K[V ] by polynomial degrees.
σ !
Now let V
V be an invertible linear transformation of V . The action of σ on
V extends to a ring automorphism of K[V ] defined as a change of variables
σ(f )(v) := f (σ −1 (v)),
f ∈ K[V ], v ∈ V.
We will abuse notation by writing σ for both the linear transformation and the ring autoσ !
morphism K[V ]
K[V ] , since the meaning should be clear from the context. We use
the inverse linear transformation σ −1 in the definition in order to ensure “associativity”:
σ,τ
! K[V ] are automorphisms defined as above, then
namely if K[V ]
τ (σ(f )) = τ (f ◦ σ −1 ) = f ◦ σ −1 ◦ τ −1 = f ◦ (τ σ)−1 = (τ σ)(f ).
Definition 1. Let G be a finite group of invertible linear transformations of V , and consider its elements as ring automorphisms of K[V ], by the definition above. An invariant
of G is a polynomial f ∈ K[V ] such that σ(f ) = f for all σ ∈ G. We write K[V ]G for
the subring of K[V ] consisting of all invariants of G and call it the ring of invariants
of G.
Note that the constant polynomials are always invariants since they are unaffected
by a change of variables.
3
σ
! V is a pseudoreflection
Definition 2. An invertible linear transformation V
if all but one of its eigenvalues are 1, namely if σ fixes a hyperplane – an (n − 1)dimensional subspace of V – pointwise. A pseudoreflection σ is called a reflection if it
is of order 2, namely its non-1 eigenvalue is −1. We say a finite group G of invertible
linear transformations of V is a pseudoreflection group (resp. reflection group) if
it is generated by pseudoreflections (resp. reflections).
We finish the section with several remarks.
• Every pseudoreflection in a finite group G has finite order, so the non-1 eigenvalue
is a root of unity. In particular, if V has K = R as the base field then every
pseudoreflection in G is a reflection.
• G being a finite group of invertible linear transformations of a finite-dimensional
vector space V is the same as having a faithful representation G #→ GL(V ) of
the isomorphism class G of G. We will not use the latter notation or discuss
representation theory.
• We assume that the field K has characteristic 0 for simplicity, since the symmetry
groups we will study act on the vector spaces R2 and R3 . The discussion in this
section still makes sense in finite characteristic p, and the Main Theorem we will
introduce in the next section holds as long as p and |G| are relatively prime, though
allowing finite characteristic makes the proof slightly more complicated (see [2], [3],
and [5] for details).
1.2
Major Results
A crucial result in the study of the rings of invariants of pseudoreflection groups dates
back to the 1950s work of G. C. Shephard and T. A. Todd [6] and C. Chevalley [3].
Chapter 6 will be dedicated to proving the following nice theorem.
Main Theorem. Let G be a finite group of invertible linear transformations of an ndimensional vector space V over a field K of characteristic 0. Then the following are
equivalent:
(i) G is generated by pseudoreflections.
(ii) K[V ]G is a polynomial ring in n = dim V homogeneous generators.
(iii) K[V ] is a free module over K[V ]G with a basis consisting of |G| homogeneous polynomials.
Prior to Chapter 6, we will focus on examples of the implication (i) =⇒ (ii); (iii)
is included mainly for completeness. Our goal is to determine sets of homogeneous
generators for the rings of invariants of certain groups of symmetries that are generated by
pseudoreflections. For this it is useful to know the degrees of the n generators mentioned
in (ii) of the Main Theorem, which turn out to be uniquely determined by G, up to
reordering.
4
Definition 3. The degree signature of a pseudoreflection group G is the ordered
n-tuple (d1 , . . . , dn ) of degrees of any set of n algebraically independent homogeneous
generators of K[V ]G , where d1 ≤ · · · ≤ dn . It is well-defined, namely every set of
homogeneous generators has these degrees, by the equivalence of (i) and (ii) in Proposition
13 (c) of Chapter 6.
We now present two identities that are useful in determining the degree signature and
also give a concrete connection to pseudoreflections. The proof is given in Proposition
12 in Chapter 6 .
Proposition. Let G be a finite group of invertible linear transformations generated by
pseudoreflections, with degree signature (d1 , . . . , dn ). Then
|G| =
n
!
di
|s(G)| =
and
i=1
n
"
i=1
(di − 1),
where s(G) is the set of pseudereflections of G.
Before returning to a discussion of the invariant generators, we first summarize the
previous definitions and then give examples to illustrate the results presented in this
section.
1.3
Summary of Notation
In the rest of this chapter and in the following chapters, we will assume the following
unless otherwise specified:
• V an n-dimensional vector space over a field K of characteristic 0.
• G a finite group of invertible linear transformations of V generated by pseudoreflections.
• s(G) the set of all pseudoreflections in G.
• K[V ] = K[x1 , . . . , xn ] the ring of polynomial functions on V , where {x1 , . . . , xn } is
a basis for V ∗ .
• K[V ]G the ring of invariants, generated as a polynomial ring by n algebraically
independent invariants f1 , . . . , fn , where deg fi = di and (d1 , . . . , dn ) is the degree
signature of G.
5
1.4
Simple Examples
Example 1 (Trivial group). For any finite-dimensional vector space V of dimension n,
let G be the pseudoreflection group generated by the empty set of pseudoreflections,
namely the trivial group consisting of just the identity linear transformation on V . Then
K[V ]G = K[V ] is generated by the n algebraically independent elements x1 , . . . , xn , the
n
# $% &
∗
dual
'n basis for V . The degree
(n signature is ( 1, . . . , 1 ), and we confirm that |G| = 1 =
G
i=1 1 and |s(G)| = 0 =
i=1 (1 − 1). The basis for K[V ] as a free module over K[V ]
is of course just {1}.
σ
!R
Example 2. Let V = R and G be the group generated by the reflection R
defined by σ(v) := −v for all v ∈ R, which fixes the origin hyperplane. Since σ has order
2, G = {id, σ}. Since σ is a ring automorphism of R[V ] = R[x1 ],
σ(xd1 ) = σ(x1 )d = (−x1 )d = (−1)d xd1 ,
so xd1 is an invariant if and only if d is even. Thus x21 generates the ring of invariants,
namely R[V ]G = R[x21 ], so the degree signature is (2). Note that |G| = 2 and |s(G)| =
2 − 1. A homogeneous basis for R[V ] as a free R[V ]G -module is {1, x1 }.
Example 3. In Example 2, we can change the field R to C without affecting the rest of
the discussion. Note that the linear transformation C σ ! C defined by σ(z) := −z for
all z ∈ C is still a reflection since the origin is still a hyperplane in C. But now we can
visualize C as a plane, on which σ acts as rotation by π radians:
Im
z = a + bi
Re
σ(z) = −a − bi
The next example will show why this is interesting.
Example 4 (“Non-example”). We now give an example where G is a finite group of
linear transformations of V that is not a pseudoreflection group, and where K[V ]G is not
a polynomial ring. Take V = R2 with the standard basis {e1 , e2 } and let G be generated
by the rotation r by π radians about the origin, namely r(e1 ) = −e1 and r(e2 ) = −e2 .
Letting x denote the e1 -coordinate and y denote the e2 -coordinate, the action of r in the
xy-plane looks just like the action of the pseudoreflection σ of Example 3 in the complex
“plane” C:
y
v = (a, b)
x
r(v) = (−a, −b)
6
But r is not a pseudoreflection since both its eigenvalues are −1; indeed, its only fixed
point is the origin, which is not a hyperplane since the vector space is two-dimensional,
whereas in Example 3 the complex “plane” C was a one-dimensional vector space. So
G = {1, r} is not generated by pseudoreflections.
To determine the ring of invariants, we compute
r(xd11 xd22 ) = (−x1 )d1 (−x2 )d2 = (−1)d1 +d2 xd11 xd22 ,
so that the monomial xd11 xd22 is invariant if and only if d1 + d2 is even. Thus R[V ]G is
generated by x21 , x1 x2 , and x22 , which are not algebraically independent since (x21 )(x22 ) =
(x1 x2 )2 , whence R[V ]G = R[x21 , x1 x2 , x22 ] is not a polynomial ring. R[V ] is not a free
R[V ]G -module; for instance {1, x1 , x2 } is not a basis since (x1 x2 ) · x1 = (x21 ) · x2 .
Example 5 (Symmetric groups). Let V be K n with basis {e1 , . . . , en }. Let G be the
(ij)
! K n defined for 1 ≤ i < j ≤ n by (ij)(ei ) := ej ,
group generated by reflections K n
(ij)(ej ) := ei , and (ij)(ek ) := ek for k )= i, j. If we heed the suggestive notation and
think of these reflections as transpositions, then it is clear that G is isomorphic to the
symmetric group Sn on n letters, which is generated by its transpositions. The invariants
of K[V ] are those polynomials “symmetric” in the xi , and it is a well-known fact (see
547-551 of [1]) that all such polynomials are generated by the n algebraically independent
elementary symmetric polynomials
"
Pr :=
xi 1 · · · xi r
1≤i1 <···<ir ≤n
for 1 ≤ r ≤ n. Each
) *degree
' Pr is of degree r, so the
( signature is (1, 2, . . . , n). We confirm
that |G| = n! = nr=1 r and that |s(G)| = n2 = nr=1 (r − 1). We refrain from trying to
write down a basis for K[V ] as a free K[V ]G -module.
Example 6 (Some pseudoreflection groups that are not reflection groups). Let V = C, let
r ≥ 2 be an integer, and let G be the group generated by the pseudoreflection C σ ! C
defined by σ(z) := e2πi/r · z for each z ∈ C, which fixes the hyperplane z = 0. We already
saw the case r = 2 in Example 3, but for r ≥ 3 the eigenvalue e2πi/r , a primitive rth
root of unity, is non-real, whence σ is a pseudoreflection that is not a reflection. We have
G = {id, σ, σ 2 , . . . , σ r−1 } and all the non-identity elements are pseudoreflections since
each one fixes only 0. If we visualize C as a plane, then σ corresponds to rotation by 2π
r
radians. For instance, when r = 4:
Im
z
σ(z) = e
πi/2
z
Re
7
Since σ generates G, a polynomial f ∈ K[V ] is invariant if and only if σ(f ) = f . Recalling
that σ(f ) = f ◦ σ −1 , we compute
σ(xd1 ) = (e−2πi/r x1 )d = e−2dπi/r xd1 ,
so that xd1 is an invariant if and only if d ≡ 0 (mod r). Thus xr1 generates the ring of
invariants, namely K[V ]G = K[xr1 ], so the degree signature is (r). Note that |G| = r and
|s(G)| = r −1. A homogeneous basis for K[V ] as a K[V ]G -module is {1, x1 , x21 , . . . , xr−1
1 }.
1.5
Proving Polynomials Generate K[V ]G
In the following chapters we will study the rings of invariants of more complicated reflection groups. For each such group G, our two main goals will be to
(i) Determine a set of n homogeneous invariant polynomials g1 , . . . , gn for K[V ]G with
no obvious dependence relations;
(ii) Prove g1 , . . . , gn generate K[V ]G .
Of course, we can only do (ii) if we chose polynomials in (i) that really are generators. We
will see in later chapters that geometric features of the symmetry groups we are studying
will yield sets of polynomials that will turn out to be generators. For now, we describe
our approach to (ii): an easy method for proving that the polynomials generate K[V ]G .
1.5.1
Step 1: Check the degrees
Our first test, after making sure there are no obvious dependence relations among the
homogeneous invariants g1 , . . . , gn , is to check whether the g1 , . . . , gn have degrees matching the degree signature. But first we need to know the degree signature! If we know |G|
and |s(G)|, which we will compute geometrically, as well as n − 2 of the di s in the degree
signature, then the system of two equations
|G| =
n
!
i=1
di ,
|s(G)| =
n
"
i=1
(di − 1)
allows us to solve for the remaining two unknowns. We will be restricting our attention
to groups acting on vector spaces of dimensions two and three, so the assumption that
we know n − 2 of the di s will not be as demanding as it may initially sound.
1.5.2
Step 2: Check n linear independences
If our n homogeneous invariants g1 , . . . , gn have degrees matching the degree signature,
then showing they are algebraically independent is enough to prove that they generate
K[V ]G (Prop. 13 (c)). Unfortunately, it seems difficult to prove algebraic independence:
in principle, we have to rule out dependence relations in every positive degree. Naively,
8
this requires checking an infinite number of cases. Fortunately, this brute force method of
ruling out dependence relations is actually quite useful. Instead of focusing on algebraic
independence, we can directly show g1 , . . . , gn are generators using the fact that their
degrees match the degree signature, as long as the gi have no dependence relations in
any of the degrees of the degree signature. Since d1 ≤ · · · ≤ dn , another way of saying
this is that we just need to check gi ∈
/ K[g1 , . . . , gi−1 ] for each 1 ≤ i ≤ n, a finite number
of cases. We now formally state and prove this claim.
Proposition 1. Let (d1 , . . . , dn ) be the degree signature of G. If g1 , . . . , gn are homogeneous invariants such that deg gi = di and gi ∈
/ K[gi , . . . , gi−1 ] for each 1 ≤ i ≤ n, then
the gi are a set of homogeneous generators for K[V ]G .
Proof. By definition of degree signature we can choose homogeneous invariant generators f1 , . . . , fn for K[V ]G such that deg fi = di for each i. Since the gi are invariants,
K[g1 , . . . , gn ] ⊆ K[V ]G = K[f1 , . . . , fn ]. Now we use the following lemma to deduce that
K[g1 , . . . , gn ] = K[f1 , . . . , fn ].
For the following lemma, ignore the notation of Section 1.3.
Lemma 1. Suppose g1 , . . . , gn are homogeneous polynomials of degrees d1 ≤ · · · ≤ dn ,
such that gi ∈
/ K[g1 , . . . , gi−1 ] for each i. Suppose f1 , . . . , fn are homogeneous polynomials
with deg fi = di for each i, such that K[g1 , . . . , gn ] ⊆ K[f1 , . . . , fn ]. Then K[g1 , . . . , gn ] =
K[f1 , . . . , fn ].
Proof. Induction on n. If n = 0 the result is trivial. So suppose n > 0 and let r < n
be the maximum integer such that dr < dn , where we set r = 0 if d1 = · · · = dn .
By the inductive assumption, K[g1 , . . . , gr ] = K[f1 , . . . , fr ]. By choice of r, we have
dr+1 = · · · = dn > dr . Since each gi ∈ K[f1 , . . . , fn ], we can choose Pi ∈ K[f1 , . . . , fr ]
and ai,j ∈ K for each 1 ≤ j ≤ n − r such that
gr+i = ai,1 fr+1 + · · · + ai,n−r fn + Pi
for each 1 ≤ i ≤ n − r. Since gi ∈
/ K[g1 , . . . , gi−1 ] for each i and K[g1 , . . . , gr ] =
K[f1 , . . . , fr ], the (n − r) (n − r)-tuples (ai,1 , . . . , ai,n−r ) for 1 ≤ i ≤ n − r are linearly
independent as vectors in the K-vector space K n−r . But this means that we can solve
for the fr+i in terms of the gr+i , namely there exist Qi ∈ K[f1 , . . . , fr ] and bi,j ∈ K such
that
fr+i = bi,1 gr+1 + · · · + bi,n−r gn + Qi
for each 1 ≤ i ≤ n − r. Thus fr+i ∈ K[g1 , . . . , gn ] for each 1 ≤ i ≤ n − r, whence
K[g1 , . . . , gn ] = K[f1 , . . . , fn ].
1.5.3
Alternate method: field extensions
There are also methods for proving algebraic independence or generation directly, for
instance using field extensions. We will only give a sketch of the ideas involved. Extending the action of G to automorphisms of the field of fractions K(V ) of K[V ] as in
9
Section 6.2, we obtain a Galois (hence finite degree |G|) extension K(V )/K(V )G , where
K(V )G denotes the G-fixed subfield (Prop. 5). Moreover, K(V )G is the same as the field
of fractions of the ring of invariants K[V ]G (Prop. 5), so that if f1 , . . . , fn are homogeneous generators of K[V ]G , then the fi also generate K(V )G as a field extension over K,
whence K(x1 , . . . , xn )/K(f1 , . . . , fn ) is a degree |G| extension. Now if g1 , . . . , gn are n homogeneous invariants, then by the additivity of both regular degrees and transcendence
degrees of the extensions
K(V ) = K(x1 , . . . , xn )
degree |G|
K(V )G = K(f1 , . . . , fn )
tr. deg. n
K(g1 , . . . , gn )
K
we see that
(i) g1 , . . . , gn are algebraically independent if and only if K(x1 , . . . , xn )/K(g1 , . . . , gn )
is algebraic (i.e. has transcendence degree 0);
(ii) g1 , . . . , gn generate K[V ]G if and only if K(x1 , . . . , xn )/K(g1 , . . . , gn ) is finite of
degree |G|.
When n is small and the gi are relatively simple, it is not too difficult to compute
the degree of the field extension K(x1 , . . . , xn )/K(g1 , . . . , gn ) by splitting it up into n
extensions in which the xi are added one at a time. We will give an example of this
method in 4.3.2, but otherwise we will use the easier method of 1.5.2.
1.6
Summary of What is to Come
In this chapter, we introduced the basic notation and the main results pertaining to
the ring of invariants, which we will prove in Chapter 6. We also described the method
we will use in Chapters 4 and 5 to prove that sets of polynomials generate the rings of
invariants of certain symmetry groups. In the coming chapters, we will do the following:
• In Chapter 2 we introduce the geometric objects – regular n-gons and the platonic
solids – that we will be studying.
• In Chapter 3 we describe key properties of the symmetry groups of the regular
n-gons and the platonic solids.
• In Chapter 4 we find generators for the rings of invariants of the symmetry groups
of regular n-gons.
10
• In Chapter 5 we find generators for the rings of invariants of the symmetry groups
of the platonic solids.
• In Chapter 6 we give a detailed proof of the Main Theorem.
11
Chapter 2
Geometric Objects of Study
This chapter is a brief introduction to the regular n-gons and the platonic solids. We will
need a basic geometric understanding in order to study the symmetry groups of these
geometric objects in Chapter 3.
2.1
Regular n-gons
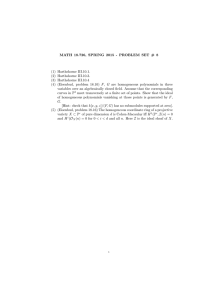
For n ≥ 3, we consider the regular
n-gon in *the xy-plane, centered at the origin, with
)
2kπ
vertices on the unit circle at cos n , sin 2kπ
for each integer 0 ≤ k ≤ n − 1. Some
n
examples are given in the diagram below.
y
y
x
x
n=3
y
y
x
n=4
y
x
y
x
n=6
n=5
n=7
x
n=8
The First Six Regular n-gons
For now, we note only that regularity of the n-gon ensures that the n-gon is symmetric
with respect to each vertex and each edge. Intuitively, the regular n-gon “looks the same”
from the perspective of each vertex, as well as from the perspective of each edge.
12
2.2
The Platonic Solids
A platonic solid is a convex polyhedron with all faces congruent regular polygons, such
that the number of faces meeting at a vertex is the same for each vertex. One can
prove by elementary geometry (see Coxeter 5, [4]) that there are only five platonic solids,
namely:
Tetrahedron
Cube
Octahedron
Dodecahedron
Icosahedron
The Platonic Solids
Like the regular n-gons, the platonic solids have the useful regularity property that they
are symmetric with respect to their vertices, edges, and faces.
Some basic characteristics of the platonic solids are:
Platonic Solid
tetrahedron
cube
octahedron
dodecahedron
icosahedron
Faces
4
6
8
12
20
Vertices
4
8
6
20
12
Edges
6
12
12
30
30
Face Shape
triangle
square
triangle
pentagon
triangle
y
The drawings above show the platonic solids centered at the origin in the frame z
for R3 , with the following coordinates for the vertices (Coxeter 52-53, [4]), where φ =
is the golden ratio:
13
x
√
5+1
2
Platonic Solid
tetrahedron
cube
octahedron
dodecahedron
icosehedron
2.3
Vertex Coordinates
(1, 1, 1), (−1, −1, 1), (1, −1, −1), (−1, 1, −1)
(±1, ±1, ±1)
(±1, 0, 0), (0, ±1, 0), (0, 0, ±1)
(±1, ±1, ±1), (0, ± φ1 , ±φ), (± φ1 , ±φ, 0), (±φ, 0, ± φ1 )
(0, ±1, ±φ), (±1, ±φ, 0), (±φ, 0, ±1)
Adjacency Graphs of the Platonic Solids
If we are mainly interested in studying the arrangement of faces, vertices, and edges,
then we can distort the faces of a solid to draw an adjacency graph. We can choose a
face or a vertex as the central point of the graph; we will see later why both versions of
the graph are useful.
Tetrahedron
Cube
Dodecahedron
Octahedron
Icosahedron
Adjacency Graphs of the Platonic Solids
The straight lines in an adjacency graph correspond to the edges of the solid, with
vertices at the intersections. The faces of the solid correspond to the regions bounded
by lines in the adjacency graph. The outer circle denotes a single vertex if it intersects
straight lines, while otherwise it indicates that there is a face containing all the vertices
and edges on the border of the subgraph contained within the circle. For instance, the
outer circle in the first tetrahedron graph represents a vertex with three incident edges,
while the outer circle in the first cube graph indicates an additional face containing the
four vertices and four edges on the boundary of the inner subgraph, like the lid of a box.
One of the useful features of an adjacency graph drawn with radial symmetry, like
all the graphs above, is that a straight line through the center of the face-centered (resp.
vertex-centered) graph corresponds to the intersection of the platonic solid with a plane
through the origin that intersects the center of a face (resp. a vertex).
14
2.4
Dual Polyhedra
Given any polyhedron, we can form its dual polyhedron by switching the roles of faces
and vertices. The octahedron is the dual of the cube: if we place a vertex in the center of
each face of the cube and add an edge between a pair of vertices when the corresponding
faces of the cube share an edge, we get the octahedron. The dual of a dual is the original
polyhedron up to scaling – for instance, in the diagram below the inner cube is smaller
than the outer cube by a factor of 3 – so the cube is also the dual of the octahedron.
Duality of the Cube and Octahedron
Likewise, the dodecahedron and the icosahedron are dual, while the tetrahedron is dual to
itself. Duality is important in our discussion because, as we will see in the next chapter,
dual platonic solids share a group of symmetries.
15
Chapter 3
Symmetry Groups
We wish to study the groups of symmetries of the regular n-gons in R2 and the platonic
solids in R3 . A symmetry of a geometric object drawn in Rn is an isometry of Rn that
preserves the object as a whole, not necessarily pointwise. The collection of all symmetries
of an object forms a group called the group of symmetries or the symmetry group
of that object. For instance, as we will see, the group of symmetries of a regular n-gon
in R2 consists of n rotations and n rotations composed with a reflection.
3.1
Isometries that Fix the Origin
An isometry or rigid motion Rn
serving map, namely
M
!
Rn of the vector space Rn is a distance pre-
-M v − M w- = -v − w-
for every v ∈ Rn .
In R2 , every isometry is composed of a translation, a rotation about a point, and possibly
a reflection about a line (Artin 157-158, [1]). Intuitively, if we imagine the plane as an
infinite sheet of paper lying on an infinitely large table, isometries correspond to sliding
the paper around, rotating it about any point, flipping it over, or any combination of
these actions. Similarly, isometries of R3 are composed of translations, rotations about
lines, and reflections across planes.
Isometries need not be linear transformations; consider for instance translation by a
nonzero vector. However, there is an equivalence (Artin 127, [1]) between
• isometries of Rn that fix the origin and
• orthogonal linear transformations of Rn ,
T
! Rn is orthogonal if T −1 = T t . Since the regular
where a linear transformation Rn
n-gons and platonic solids are centered at the origin, the isometries that fix these geometric objects must fix the origin, hence every symmetry we will be considering is an orthogonal linear transformation. The fact that the symmetries are linear transformations is
16
crucial since the Main Theorem requires that G be a group of linear transformations. We
will use the fact that every symmetry is orthogonal in 3.4.1, when we discuss a method
for finding invariants of a group of symmetries.
3.2
Symmetry Groups of Regular n-gons
Let n ≥ 3 and let Dn denote the )symmetry group
* of the regular n-gon in the xy-plane
2kπ
2kπ
with vertices on the unit circle at cos n , sin n for each integer k ∈ {0, 1, . . . , n − 1},
as in Section 2.1. Namely, Dn consists of those isometries of R2 that fix the regular n-gon
as a whole. Our choice of notation suggests a connection to the dihedral groups, and
indeed, we will show that Dn , the symmetry group of the regular n-gon, is isomorphic to
the dihedral group of order 2n. The key facts we will prove are:
Group
Dn
3.2.1
Order
2n
Number of Reflections
n
Degree Signature
(2, n)
Characterization, order, and degree signature of Dn
Let σ be rotation about the origin by 2π
radians, so that σ k is rotation about the origin
n
by 2kπ
radians, and let τ be reflection across the x-axis (the hyperplane y = 0). Then τ
n
and the powers of σ are isometries that preserve the regular) n-gon, namely* symmetries
of the n-gon. Let vk denote the vertex with coordinates cos 2kπ
, sin 2kπ
. We have
n
n
2
already noted that the isometries of R that fix the regular n-gon must fix the origin.
Moreover, the isometries fixing the n-gon are precisely those that map every vertex of
the n-gon to another vertex. With this in mind, we focus attention on the coordinates
of one vertex, say (1, 0) for v0 . Any isometry σ % of R2 that fixes the n-gon must move v0
to some vk . Thus the composition σ −k ◦ σ % fixes (1, 0) as well as the origin, hence fixes
the x-axis pointwise, so it must be either the identity or reflection across the x-axis τ .
So σ −k ◦ σ % = τ l for l ∈ {0, 1}, which implies σ % = σ k ◦ τ l . Thus the symmetries of the
regular n-gon are the elements
+
,
Dn = σ k τ l : with k ∈ {0, 1, . . . , n − 1} and l ∈ {0, 1} .
We can confirm that these elements are all unique by writing σ and τ as matrices. In
the standard basis, they are
2π
−
sin
1
0
cos 2π
n
n
.
,
τ =
σ=
2π
2π
sin n
cos n
0 −1
Now by inspection, we see that the matrices
2kπ
2kπ
l+1
cos
(−1)
sin
n
n
σk τ l =
sin 2kπ
(−1)l cos 2kπ
n
n
17
are distinct for integers k ∈ {0, 1, . . . , n − 1}, l ∈ {0, 1}.
Thus we have shown that Dn has order 2n and is generated by σ, rotation about the
origin by 2π
radians, and τ , reflection across the x-axis. We can check (algebraically or
n
geometrically) that τ σ = σ n−1 τ , so that we can also write
Dn = .σ, τ : σ n = τ 2 = 1, τ σ = σ n−1 τ /.
Thus, as our notation suggests, the group of symmetries of the regular n-gon is isomorphic
to the dihedral group of order 2n.
When n = 3, the elements of D3 are:
id
σ
σ2
τ
στ
σ2τ
D3 , the Symmetry Group of the Equilateral Triangle
For each symmetry, we have circled the vertex that is the image of (1, 0); note that it
is determined by the power of σ, as in the discussion above. Rotations are denoted by
curving dotted lines arranged in a circle, and reflections by a dotted line representing
the fixed hyperplane, together with dotted arcs indicating which vertices are being interchanged (the remaining vertex is fixed). We have also labeled each element by its
expression in the generators σ, τ . Note in particular that each element in the bottom row
is a reflection. Indeed, as we show in the next section, it is true for general n that each
of the elements σ k τ of Dn is a reflection. Since there are n elements of the form σ k τ , we
then know |Dn | = 2n, |s(Dn )| = n, and 2 − 2 = 0 of the degrees in the degree signature,
so that as discussed in 1.5.1, we can solve the system of equations
2n = |Dn | = d1 d2 ,
n = |s(Dn )| = d1 + d2 − 2
to deduce that d1 = 2 and d2 = n, whence the degree signature is (2, n).
18
3.2.2
Dn is a reflection group
The first thing to note is that there are n lines dividing a regular n-gon into mirror
images. When n is odd, each of these lines intersects a vertex and the midpoint of an
edge. When n is even, half the lines intersect two vertices, while the other half intersect
the midpoints of two edges. For n ∈ {3, 4, 5, 6}, these lines are
Reflection Hyperplanes of Some Regular n-gons
Since there are n possible reflection hyperplanes, Dn has exactly n reflections, namely
|s(Dn )| = n. Since a reflection is orientation-reversing, meaning (algebraically) that it
has negative determinant and (geometrically) that it changes the clockwise order of the
vertices of the regular n-gon, we see that the n reflections must coincide with the n
elements σ k τ , which also have negative determinant and change the clockwise order of
the vertices. Since half the elements of Dn are reflections and the identity id is not a
reflection, the reflections generate Dn by the following simple lemma.
Lemma 2. Let G be a finite group and S a subset of G such that |S| ≥
Then the elements of S generate G.
|G|
2
and id ∈
/ S.
Proof. Let H be the subgroup of G generated by S. Then id ∈ H, so |H| > |S| ≥
But the order of a subgroup must divide the order of the group, whence |H| = |G|.
3.3
|G|
.
2
Symmetry Groups of the Platonic Solids
We now shift our focus to the platonic solids in R3 , with vertices at the points given in
Section 2.2. As with the two-dimensional symmetries of the regular n-gons, the isometries
that fix a platonic solid are precisely those that fix its set of vertices, or, equivalently,
its set of centers of faces. Since taking the dual of a platonic solid interchanges the
vertex set with the set of centers of faces (more precisely, one of the sets will differ by a
constant multiple), we see that the dual pairs of platonic solids have the same groups of
symmetries. Thus the five platonic solids have only three distinct groups of symmetries:
• the tetrahedral group T of symmetries of the tetrahedron,
• the octahedral group O of symmetries of the cube and octahedron, and
• the icosahedral group I of symmetries of the dodecahedron and icosahedron.
In the following sections, we will confirm these basic properties:
19
Group
T
O
I
Order
24
48
120
Number of Reflections
6
9
15
Degree Signature
(2,3,4)
(2,4,6)
(2,6,10)
Then we will show that the groups T , O, and I are generated by their reflections.
3.3.1
Group order
We proceed in the spirit of the two-dimensional case, where we characterized each symmetry of the regular n-gon by the image of the “base position” (1, 0) and whether to
reflect across the hyperplane y = 0. But instead of starting from scratch, we can build
on the two-dimensional result.
Let G denote the symmetry group of a platonic solid. Choose a face of the platonic
solid, calling its center the “base position”, and letting Π denote the plane in R3 containing that face. Let σ % ∈ G be a symmetry fixing the base position. Since σ % also fixes
the origin, it in fact fixes the line through the origin and the base position pointwise.
This line is perpendicular to the plane Π, so σ % is completely determined by how it acts
in the plane Π. But the intersection of Π with the platonic solid is a regular n-gon, so σ %
corresponds to a dihedral symmetry in the plane Π! Explicitly, this correspondence is
dihedral rotation"
in Π
dihedral reflection "
in Π across a line &
rotation
in R3 about the line containing
!
the origin and the base position
reflection in R3 across the plane
containing the origin and the line &
!
Now, for each face f of the platonic solid, fix a symmetry σf ∈ G that moves the
center of the face f to the base position. Such symmetries exist since there are rotations
that move the center of a face to the center of any other face. If σ ∈ G is a symmetry of
the platonic solid, then it must move the base position to the center of some face f , so
σf ◦ σ fixes the base position. Thus σ % := σf ◦ σ corresponds to a dihedral symmetry in
the plane Π, so the symmetries of the platonic solid are
+
,
G = σf−1 σ % : σ % corresponds to a dihedral symmetry in Π .
These elements are distinct by construction, so we see that the order of G is the number
of faces of the platonic solid times the order of Dn , where n is the number of vertices
on each face of the platonic solid, namely each face is a regular n-gon. Recalling that
|Dn | = 2n, we get the formula
|G| = (# faces) × 2 × (# vertices on each face),
which gives the group orders listed in the table.
20
3.3.2
Number of reflections
When G is a group of symmetries of a platonic solid, the reflections of G correspond to
planes through the origin that divide the solid into mirror images. We will refer to such
planes as reflection planes. It is geometrically clear that a reflection plane must do at
least one of the following two things:
(a) contain an edge of the solid, or
(b) split a face of the solid into mirror images;
and that every plane through the origin that does (a) or (b) corresponds to a reflection.
Choosing an edge to be contained or a line splitting a face into mirror images fully
determines the reflection plane since the reflection plane must also pass through the
origin. So to obtain |s(G)| it suffices to count the number of reflection planes that
contain an edge, and add the number of reflection planes not yet counted that split a
face into mirror images.
For the tetrahedron, every reflection plane that splits a face also contains an edge,
and every reflection plane containing an edge contains exactly one edge. We can visualize
these two facts by looking at straight lines on the adjacency graphs of the tetrahedron:
Thus the number of reflections is equal to the number of edges of the tetrahedron, namely
|s(T )| = 6.
For the cube, every reflection plane that contains an edge contains exactly one pair of
opposite edges, and every reflection plane that splits a face diagonally contains an edge.
There are also reflection planes that split four faces into rectangles and contain no edges.
Since the cube has eight edges, there are four reflection planes containing edges. Each
of the reflection planes not containing an edge splits four faces into rectangles, and there
are two ways to split each face into a rectangle, for a total of 6·2
= 3 planes. Thus
4
|s(O)| = 6 + 3 = 9.
21
For the dodecahedron, each reflection plane that splits a face contains two edges, and
every reflection plane that splits an edge contains exactly two edges:
Since the dodecahedron has 30 edges, |s(I)| =
3.3.3
30
2
= 15.
Degree signature
To compute the degree signature (d1 , d2 , d3 ) when G is the symmetry group of a platonic
solid, we again use
|G| = d1 d2 d3 ,
|s(G)| = d1 + d2 + d3 − 3,
but in order to solve the system of two equations we need to know one of the di . We
claim that d1 = 2 for each of the platonic solid symmetry groups. To see this, we note
first that K[V ]G contains no linear polynomials since the only point of V fixed by G is
the origin (we explain why this is true in 3.4.1). There is, however, always a degree 2
invariant, namely the squared distance from the origin x2 + y 2 + z 2 . Since K[V ]G can
contain a degree 2 homogeneous polynomial only if one of its generators has degree at
most 2, we see that d1 = 2, which allows us to solve for d2 and d3 . If G = T , then we
= 12 and d2 + d3 = 6 + 3 − 2 = 7, whence d2 = 3 and
have the equations d2 d3 = 24
2
d3 = 4. If G = O, then d2 d3 = 48
= 24 and d2 + d3 = 9 + 3 − 2 = 10, whence d2 = 4 and
2
d3 = 6. And if G = I then d2 d3 = 120
= 60 and d2 + d3 = 15 + 3 − 2 = 16, whence d2 = 6
2
and d3 = 10.
3.3.4
Proving the reflections generate
We have not yet proven the crucial fact that the reflections in T , O, and I generate the
full symmetry groups. This is less obvious than for the symmetries of the regular n-gon,
since for the platonic solid symmetry groups the number of reflections is much less than
half the order of the group. However, the proofs that T , O, and I are reflection groups
are still easy if we use the method for enumerating the symmetries of a platonic solid
from 3.3.1.
There we chose the center of a face of the platonic solid to be the “base position” and
let Π denote the plane of R3 containing that face. For each face f , we fixed a symmetry
σf ∈ G that moves the center of f to the base position. Then we showed that the
symmetries of the platonic solid are precisely the elements
+
,
G = σf−1 σ % : σ % corresponds to a dihedral symmetry in Π .
22
Now, as mentioned in 3.3.1, the symmetries corresponding to the dihedral reflections
in the plane Π are reflections in G. Since the reflections of Dn generate Dn , the reflections
in G generate all the symmetries σ % corresponding to the dihedral symmetries in Π. Thus
to show that G is generated by reflections, it suffices to show that we can choose σf for
each face f such that the σf−1 are generated by reflections. Equivalently, it suffices to
prove the existence of σf that are themselves generated by reflections, which is the content
of the following lemma.
Lemma 3. For any two faces f, f % of a platonic solid, there is a symmetry generated by
reflections that moves the center of f to the center of f % .
The idea of the proof is simple: if f and f % are adjacent, then the reflection across the
plane through their common edge moves the center of f to the center of f % . If f and f %
are not adjacent, then a finite sequence of such reflections will do the trick. Making this
idea rigorous takes slightly more work.
Proof. We define a “face path” on the platonic solid to be a sequence of faces {f0 , f1 , . . . , fr },
such that fi is adjacent to fi+1 for each 0 ≤ i ≤ r − 1. We say that the face path starts
at f0 , ends at fr , and has length r. We then define the distance d(f, f % ) between two
faces to be the minimum length among all face paths starting at f and ending at f % . A
crucial fact is that d(f, f % ) is finite.
Now we can prove the result by induction on d(f, f % ). If d(f, f % ) = 0, then f and
%
f are the same face and the identity element is a symmetry generated by reflections
that moves the center of f to the center of f % . So assume r := d(f, f % ) > 0. Let
{f = f0 , f1 , . . . , fr−1 , fr = f % } be a face path of minimum length starting at f and ending
at f % . Then d(f, fr−1 ) = r − 1, so by the inductive assumption there is a symmetry σ
generated by reflections that moves the center of f to the center of fr−1 . But fr−1 and
fr = f % share an edge, and there is a reflection hyperplane containing that edge (see
3.3.2), so there is a reflection τ moving the center of fr−1 to the center of fr . Thus
τ ◦ σ is a symmetry that moves the center of f to the center of f % and is generated by
reflections.
3.4
Finite Orbits of Points
We conclude the chapter by introducing the method we will use to find the invariant
generators for the groups of symmetries of the regular n-gons and the platonic solids.
Given a geometric object in Rn with a finite group of symmetries G, we can look at
the orbit Σ of a point of Rn under the action of G. The order of Σ is at most |G|, which
in particular means that |Σ| is finite, so we call Σ a finite orbit of a point. Moreover,
each element of G permutes the elements of Σ, and we will be able to use this information
to extract a homogeneous polynomial invariant of degree |Σ|.
We will assume that all symmetries of the geometric object fix the origin, as in the
cases of the regular n-gons and the platonic solids. Thus each symmetry is orthogonal by
23
the discussion in Section 3.1. Moreover, the origin is a fixed point of G, but it is trivial
and we will exclude it when talking about finite orbits of points.
We pause to give a few relevant examples of finite orbits of points. For regular n-gons,
the set of n vertices and the set of n midpoints of edges are finite orbits of points. For
the platonic solids, the sets of vertices, midpoints of edges, and centers of faces are each
finite orbits of points.
3.4.1
Action of G on linear polynomials
Let’s explicitly write down how G acts on linear polynomials. We will consider the case
when V = R2 for notational convenience, though the results extend automatically to Rn .
Let x, y be the standard dual basis of V ∗ , so that we write R[V ] = R[x, y] for the ring
of polynomials on V . We first consider homogeneous linear 1polynomials
αx + βy, for
2
a
α, β ∈ R not both zero, which are linear functionals on V . If
∈ V , then
b
1 2
a
(αx + βy)
= αa + βb,
b
)
*
so we will write linear polynomials as row vectors α β and use normal matrix multiplication to represent evaluation at a vector in V . The point is that if σ ∈ G is given as
a matrix in the basis for V , then we can write
1 2
1
1 22 1 1 22t 1 2
) )
** a
)
* −1 a
α
a
σ α β
:= α β σ
= σ
,
b
b
β
b
where the second equality follows from the associativity of matrix
1 2 multiplication and the
)
*
α
orthogonality of σ. By looking at the bijection α β ↔
between homogeneous
β
linear polynomials in R[V ] and nonzero vectors in V , we see that
1 σ2acts on linear polyno)
*
α
mials in the same way it acts on points, namely σ α β ↔ σ
. Thus finite orbits of
β
nonzero points correspond to finite orbits of linear polynomials. In particular, invariant
linear polynomials are in bijection with nonzero fixed points of V , a fact we used in 3.3.3.
3.4.2
An invariant polynomial
31 2
1 24
a1
a
Let Σ =
,..., r
be a finite orbit of a point. Consider the polynomials
b1
br
PΣ,i := ai x + bi y for 1 ≤ i ≤ r. Since elements of G permute the elements of Σ, they also
permute the polynomials PΣ,i . But the elements of G are ring automorphisms of R[V ],
which in particular ensures they are multiplicative, so they permute the factors of the
polynomial
r
r
!
!
PΣ :=
PΣ,i =
(ai x + bi y).
i=1
i=1
24
Thus PΣ is an invariant polynomial, and it is homogeneous of degree |Σ|.
Note that although it is tempting to try to obtain a degree 1 homogeneous polynomial
by taking the sum of the PΣ,i , the sum tends to vanish, while the product cannot vanish
since the points in Σ are nonzero.
25
Chapter 4
Invariants of n-gon Symmetry
Groups
In this chapter we let V = R2 and G = Dn , the group of symmetries of the regular
n-gon in the plane. We have shown that Dn is generated by its reflections, so by the
Main Theorem the ring of invariants K[V ]G is a polynomial ring, with two homogeneous
generators of degrees 2 and n. We will find two homogeneous invariant polynomials of
these degrees, and then prove they generate the ring of invariants K[V ]G .
4.1
Finding Polynomial Invariants
Recall that the degree signature of Dn is (2, n). As in the case of the symmetry groups
of the platonic solids, there is an automatic degree 2 invariant, namely the distance from
the origin squared g1 := x2 + y 2 .
Next we use the finite orbit of a point method to find a homogeneous invariant of degree n. Set θ := 2π
. The n vertices of the regular n-gon, with coordinates (cos kθ, sin kθ)
n
for k ∈ {0, 1, . . . , n − 1}, are the finite orbit of any one vertex, so the homogeneous degree
n polynomial
! )
*
g2,n :=
cos(kθ) · x + sin(kθ) · y
0≤k≤n−1
is an invariant. Note that g2,n is guaranteed to have degree n since each of the factors is
a homogeneous polynomial of degree 1, which in turn is true since the points in the orbit
of vertices corresponding to the factors of g2,n are nonzero. The invariant polynomials
obtained this way for n ∈ {3, 4, 5, 6}, multiplied by constants to be monic in the highest
power of x, are given in the table below.
26
n
3
4
5
6
4.2
Vertex Coordinates
5
√ 6
(1, 0), − 12 , ± 23
Invariant Polynomial g2,n
x3 − 3xy 2
(±1, 0), (0, ±1)
1√
√
√
√ 2 1 √
√ 2
2(5+ 5)
2(5− 5)
5−1
− 5−1
(1, 0),
,±
,
,±
4
4
4
4
5
√ 6
(±1, 0), ± 12 , ± 23
x2 y 2
x5 − 10x3 y 2 + 5xy 4
x6 − 6x4 y 2 + 9x2 y 4
Proving the Invariants Generate
We want to prove that K[V ]G = R[g1 , g2,n ]. By Proposition 1 in 1.5.2, since the degrees
of g1 and g2,n match the degree signature it suffices to show that g1 ∈
/ R and g2,n ∈
/ R[g1 ].
The first statement is obvious. So is the second when n is odd, for then g2,n has odd
degree, while R[g1 ] has only polynomials of even degree since g1 has even degree.
So suppose n is even. Then we need to show that g2,n is not a linear multiple of
n/2
g1 = (x2 + y 2 )n/2 , since the latter are all the polynomials of degree n in R[g1 ]. Note
that since we chose each regular n-gon to contain the vertex (1, 0), one of the factors in
the product defining g2,n has no y term. Thus g2,n has no y n term. But (x2 + y 2 )n/2 does
n/2
have a y n term, so g1 and g2,n are linearly independent.
4.3
4.3.1
Further Remarks
Another way to find a generator
Another way to find a homogeneous degree n invariant polynomial
1 2 is to think of the nth
a
power map on the complex plane. We associate the vector
∈ R2 with the complex
b
number a + ib, and consider the composition
1 2
a
3→ a + ib 3→ (a + ib)n .
b
Let θ := 2π
. This map is invariant under the rotations σ k by the angles kθ since the nth
n
power map on C maps eikθ z to z n for all integers k; for instance
(eiθ (a + ib))n = einθ (a + ib)n = e2πi (a + ib)n = (a + ib)n .
So the complex polynomial (x + iy)n is fixed by the rotations σ k , but it is not a candidate
to be an invariant of G since it is not a real polynomial. However, its real and imaginary
parts Re(x + iy)n and Im(x + iy)n , which are real polynomials, are also fixed by the
σ k . When we take into account the reflection τ across the x-axis, which corresponds to
27
complex conjugation in the complex plane, we see that τ leaves the real part fixed, while
changing the sign of the imaginary part. Alternatively, note that τ fixes precisely those
terms in which y has even degree, while changing the sign of any term in which y has
odd degree. Since Re(x + iy)n consists of precisely those terms of (x + iy)n in which y
has even degree, it is fixed by τ as well. So the degree n homogeneous polynomial
g2 := Re(x + iy)n
is fixed by σ and τ and therefore an invariant. It is easy to see that g2 and (x2 + y 2 )n/2
are linearly independent, whence x2 + y 2 and g2 are also generators for K[V ]G .
We obtain the following non-obvious fact as a corollary:
)
*
'
Corollary 1. Let n ≥ 3, θ := 2π
, and write gn := 0≤k≤n−1 cos(kθ) · x + sin(kθ) · y .
n
Then gn is a real multiple of Re(x + iy)n if n is odd, while if n is even then gn is a real
linear combination of Re(x + iy)n and (x2 + y 2 )n/2 .
)
(
Also, since K[V ]G has no homogeneous linear invariants, the sum 0≤k≤n−1 cos(kθ) ·
*
x + sin(kθ) · y must vanish, whence we have proved the following identities:
Corollary 2. Let n ≥ 3 and set θ := 2π
. Then
n
"
"
cos(kθ) =
0≤k≤n−1
4.3.2
sin(kθ) = 0.
0≤k≤n−1
Proving generation with field extensions
Let g1 = x2 + y 2 and g2 = Re((x + iy)n ), as before. By the discussion in 1.5.3, a sufficient
(and also necessary) condition for the homogeneous invariants g1 and g2 to generate the
ring of invariants is that the field extension
R(V ) = R(x, y)
d
R(g1 , g2 )
has degree d = |Dn | = 2n. It suffices to prove that d ≤ 2n since R(g1 , g2 ) is a subfield
of the G-fixed subfield and R(x, y) has degree 2n as an extension of the G-fixed subfield,
whence d ≥ 2n.
We split the extension into two extensions by first adding x, then y:
R(x, y)
R(g1 , g2 )(x) = R(x, y 2 )
R(g1 , g2 ).
28
The top extension has degree 2 since y has minimal polynomial t2 − y 2 over R(x, y 2 ). To
show that the bottom extension has degree ≤ n, which is all we need, it suffices to show
there is a degree
7 8 n polynomial with coefficients in R(g1 , g2 ) that vanishes at x.
Set D := n2 and write
n
g2 = Re(x + iy) = Re
9
n 1 2
"
n
k=0
k
x
n−k
(iy)
k
:
=
D
"
k=0
(−1)
k
1
2
n
xn−2k y 2k .
2k
Note that every term of g2 has y to an even power. Thus we can add an appropriate
multiple of xn−2D (x2 + y 2 )D to g2 to eliminate the term of highest degree in y. Indeed,
by inductively eliminating the remaining term of highest degree in y with an appropriate
multiple of xn−2k (x2 +y 2 )k , we see that linear multiples of xn , xn−2 (x2 +y 2 ), . . . , xn−2D (x2 +
y 2 )D generate g2 over R. The degree n linear dependence obtained this way shows that
x satisfies a polynomial of degree at most n with coefficients in R[g1 , g2 ], which is what
we wanted.
29
Chapter 5
Invariants of Platonic Solid
Symmetry Groups
In this chapter we let V = R3 and G be the tetrahedral group T , the octahedral group
O, or the icosahedral group I. The method of finding invariants by using finite orbits of
points will yield invariants with degrees that are slightly too large, for recall from Section
3.3 that the symmetry groups have
Group
T
O
I
Order
24
48
120
Degree Signature
(2, 3, 4)
(2, 4, 6)
(2, 6, 10)
and from Section 2.2 that the platonic solids have
Platonic Solid
tetrahedron
cube
octahedron
dodecahedron
icosehedron
Faces
4
6
8
12
20
Vertices
4
8
6
20
12
Edges
6
12
12
30
30
We know one invariant polynomial is distance squared from the origin x2 + y 2 + z 2 ,
which accounts for the d1 = 2 in each degree signature. For T we need to get two more
invariants with degrees d2 = 3 and d3 = 4, yet the only degrees we can get using the
finite orbit of a vertex, midpoint of an edge, or center of a face are in the set {4, 6}.
Similarly, for O we need two invariants with degrees d2 = 4 and d3 = 6, yet the only
available degrees are {6, 8, 12}. And for I we need two invariants with degrees d2 = 6
and d3 = 10, but we only have {12, 20, 30} as the orders of our orbits. However, note
that in each case di has the property that either
• di is in the set of orders of the orbits, or
30
• 2di is in the set of orders of the orbits.
We will show that when the former fails, there is an orbit of order 2di with a half orbit
of cardinality di that also gives rise to an invariant polynomial, whence we will obtain
invariant polynomials of degrees matching the degree signature.
5.1
Half Orbits
We investigate a sufficient condition for half of a finite orbit of a point, which we call a
half orbit, to yield an invariant polynomial. If Σ is a finite orbit of a point, then the
first thing to look for is that the points of Σ are symmetric with respect to the origin,
namely that if (a, b, c) ∈ Σ, then the opposite point (−a, −b, −c) ∈ Σ. For then if Σ% ⊂ Σ
is a half orbit with no two points opposite, we have
PΣ = ±(PΣ! )2
in the notation of 3.4.2, and PΣ! is our candidate polynomial of half the degree of PΣ ,
which may turn out to be an invariant. Now we look at the orbit G(Σ% ) of Σ% under the
action of G on subsets of Σ of cardinality |Σ|
, namely half orbits of Σ. Σ% has no two
2
points opposite, and the action of G on Σ% preserves this property. Moreover, Σ% contains
exactly one point from each pair of opposite points of Σ, hence so does each element of
G(Σ% ). Thus the polynomials corresponding to the half orbits in G(Σ% ) are the same up
to sign. The polynomials corresponding to two such half orbits Σ%1 , Σ%2 have the same sign
if and only if the number of points Σ%1 does not have in common with Σ%2 is even, since
each non-common point leads to a factor of −1 in the polynomial. Thus we have shown
that:
Proposition 2. Let Σ be a finite orbit of a point consisting of pairs of opposite points.
Let Σ% denote a half orbit of non-opposite points. Then PΣ! is an invariant polynomial if
and only if |Σ% − σ(Σ% )| is even for each σ ∈ G.
5.2
Invariants of the Tetrahedral Group T
Recall that T has degree signature (2, 3, 4), that x2 + y 2 + z 2 is an invariant, and that the
tetrahedron has four vertices, four faces, and six edges, which yield invariants of degrees
four, four, and six, respectively. The centers of faces lie on lines through a vertex and
the centroid of the tetrahedron, so the invariant polynomial corresponding to centers of
faces will be a constant multiple of the polynomial corresponding to the orbit of vertices.
Thus we really have just three invariants of degrees two, four, and six, where the six
is too large by a factor of 2. So we would like to show that taking half of the orbit of
midpoints of edges will still yield an invariant polynomial.
The orbit of six midpoints of edges Σ := {(±1, 0, 0), (0, ±1, 0), (0, 0, ±1)} is symmetric
with respect to the origin. Set Σ% := {(1, 0, 0), (0, −1, 0), (0, 0, 1)}, which is a half orbit
31
of non-opposite points, all of which lie on a single face of the tetrahedron:
Σ% on the Tetrahedron
Then the orbit G(Σ% ) of Σ% consists of four elements corresponding to the four faces of
the tetrahedron:
Σ%
The other three half orbits in G(Σ% ) on the tetrahedron
Each of these triples of points has an odd number of points in common with Σ% , whence
|Σ% − σ(Σ% )| is even for each σ ∈ G, so the polynomial
PΣ! = x(−y)(z) = −xyz
is an invariant of degree 3.
Now we compute the invariant of degree 4. The orbit of vertices is {(1, 1, 1), (−1, −1, 1),
(1, −1, −1), (−1, 1, −1)} (which by the way is not symmetric with respect to the origin),
with corresponding invariant
(x + y + z)(−x − y + z)(x − y − z)(−x + y − z)
= 2(x4 + y 4 + z 4 ) − (x2 + y 2 + z 2 )2 .
Since x2 + y 2 + z 2 is itself invariant, we will take x4 + y 4 + z 4 as our degree 4 invariant to
simplify notation. Likewise, we multiply PΣ! by −1 and the result is still invariant. We
will prove later that
x2 + y 2 + z 2 , xyz, x4 + y 4 + z 4
generate the ring of invariants of T .
5.3
Invariants of the Octahedral Group O
O has degree signature (2, 4, 6) with x2 + y 2 + z 2 as a degree 2 invariant. The octahedron
has eight faces, six vertices, and 12 edges, while its dual polyhedron the cube has six
faces, eight vertices, and 12 edges.
32
We begin by looking at the six centers of faces of the cube (vertices of the octahedron)
{(±1, 0, 0), (0, ±1, 0), (0, 0, ±1)}. Though this orbit is symmetric with respect to the
origin, a half orbit of non-opposite points corresponds to the centers of faces that have a
common vertex, and two such sets of centers can differ at only one point:
∗
∗ ∗
∗
∗ ∗
Two half orbits of centers of faces of the cube
So we must take the full orbit of six centers of faces, obtaining the invariant polynomial
x2 y 2 z 2 .
Now we look at the orbit of eight vertices of the cube Σ := {(±1, ±1, ±1)} (which
are also a constant multiple of the centers of faces of the octahedron), with the intent
of finding a half orbit yielding an invariant polynomial. Again, we have symmetry with
respect to the origin. Let Σ% be a half orbit of four vertices that lie on single face of the
cube (the centers of four faces of the octahedron that meet at a vertex) and are hence
non-opposite.
∗
∗
∗
∗
The points corresponding to Σ%
The orbit G(Σ% ) of Σ% contains six elements corresponding to the faces of the cube (vertices
of the octahedron):
∗
∗ ∗
∗
∗
∗
∗∗
∗∗
∗
∗
∗∗
∗
∗
∗
∗
∗∗
∗
The orbit G(Σ% ) on the octahedron
∗
∗
∗
Letting the first image denote Σ% , we note that every half orbit in G(Σ% ) differs from Σ%
at an even number of points, namely |Σ% − σ(Σ% )| is even for each σ ∈ G. So letting Σ%
correspond to the face of the cube on which the x-coordinate is uniformly 1, we get the
invariant
PΣ! = (x + y + z)(x + y − z)(x − y + z)(x − y − z)
= 2(x4 + y 4 + z 4 ) − (x2 + y 2 + z 2 )2 ,
33
where as before we will take x4 + y 4 + z 4 for simplicity. We will prove shortly that the
invariants
x 2 + y 2 + z 2 , x4 + y 4 + z 4 , x2 y 2 z 2
generate the ring of invariants of O.
5.4
Invariants of the Icosahedral Group I
We know that I has degree signature (2, 6, 10) and that x2 +y 2 +z 2 is a degree 2 invariant.
The dodecahedron has 12 faces, 20 vertices, and 30 edges, while the icosahedron has 20
faces, 12 vertices, and 30 edges. We will show that taking half orbits of the vertices of
the dodecahedron (faces of the icosahedron) and of the vertices of the icosahedron (faces
of the dodecahedron) yields invariants of the right degrees.
The 12 vertices
of the icosahedron are Σ := {(0, ±1, ±φ), (±1, ±φ, 0), (±φ, 0, ±1)},
√
1+ 5
where φ = 2 is the golden ratio. Clearly Σ is symmetric with respect to the origin.
We choose a non-opposite half orbit by selecting one vertex of the icosahedron and its
five neighboring vertices, for instance Σ% := {(1, ±φ, 0), (φ, 0, ±1), (0, ±1, φ)}, which we
can visualize as
Σ% on the Icosahedron
The orbit G(Σ% ) of Σ% contains 12 elements, one for each face of the dodecahedron, which
can have the following possible arrangements up to radial symmetry:
Type 1
∗ ∗
∗ ∗
∗ ∗
Type 2
Type 3
∗
∗ ∗
∗ ∗
∗
∗
∗
∗
∗
Type 4
∗ ∗
∗
∗
∗
∗ ∗
∗
G(Σ% ) on the dodecahedron, up to radial symmetry
Letting Σ% be the set of type 1, we note that the set of type 1 differs from any set of type
2 at two vertices, from any set of type 3 at four vertices, and from the set of type 4 at
all six vertices. Thus |Σ% − σ(Σ% )| is even for each σ ∈ G, so the polynomial
P := PΣ! = (x + φy)(x − φy)(φx + z)(φx − z)(y + φz)(−y + φz)
= (x2 − φ2 y 2 )(φ2 x2 − z 2 )(−y 2 + φ2 z 2 ).
34
is invariant.
The 20 vertices of the dodecahedron are (±1, ±1, ±1), (0, ± φ1 , ±φ), (± φ1 , ±φ, 0), (±φ, 0, ± φ1 ),
√
where φ = 1+2 5 is the golden ratio, and they correspond to the centers of faces of the
icosahedron. We choose a non-opposite half orbit of ten vertices of the dodecahedron by
selecting the five vertices that lie on a face, as well as the five vertices adjacent to the
original five vertices. For instance
3
1
2 1
2 1
24
1
1
1
%
Σ := (±1, ±1, 1), φ, 0, ±
,
, ±φ, 0 , 0, ± , φ
,
φ
φ
φ
which we can visualize as
Σ% on the Dodecahedron
The orbit G(Σ% ) of Σ% contains one element for each of the 12 faces of the dodecahedron.
Viewed as centers of faces on the adjacency graph of the icosahedron, these elements are,
up to radial symmetry:
Type 1
∗
∗
∗ ∗ ∗
∗
∗ ∗
∗
∗
Type 2
Type 3
∗
∗ ∗
∗
∗ ∗
∗
∗ ∗
∗
∗ ∗ ∗
∗
∗ ∗∗ ∗
∗ ∗
∗∗
Type 4
∗
∗
∗∗
∗
∗
∗∗
G(Σ% ) on the icosahedron, up to radial symmetry
The set Σ% of type 1 differs from type 2 on four faces, from type 3 on six faces, and from
type 4 on all 10 faces. Thus |Σ% − σ(Σ% )| is even for each σ ∈ G, so the polynomial
1
2
1
PΣ! := (x + y + z)(x − y + z)(−x + y + z)(−x − y + z) φx + z
φ
1
21
21
21
21
2
1
1
1
1
1
φx − z
x + φy
x − φy
y + φz
− y + φz
φ
φ
φ
φ
φ
is invariant. To simplify notation we eliminate φ in the denominators, obtaining the
invariant
)
*
Q := φ6 · PΣ! = 2(x4 + y 4 + z 4 ) − (x2 + y 2 + z 2 )2 (φ4 x2 − z 2 )(x2 − φ4 y 2 )(−y 2 + φ4 z 2 ).
We will show below that the polynomials
x2 + y 2 + z 2 ,
generate the ring of invariants of I.
35
P,
Q
5.5
Proving the Invariants Generate
Proposition 3. The following table of invariant generators for the rings of invariants
of the tetrahedral, octahedral, and icosahedral groups is correct:
Group
T
O
I
Generators of the Ring of Invariants
x + y2 + z2
xyz
x4 + y 4 + z 4
x2 + y 2 + z 2 x4 + y 4 + z 4
x2 y 2 z 2
x2 + y 2 + z 2
P
Q
2
where
P := (x2 − φ2 y 2 )(φ2 x2 − z 2 )(−y 2 + φ2 z 2 );
)
*
Q := 2(x4 + y 4 + z 4 ) − (x2 + y 2 + z 2 )2 (φ4 x2 − z 2 )(x2 − φ4 y 2 )(−y 2 + φ4 z 2 ).
Proof. We use Proposition 1 from 1.5.2, noting that the degrees of the proposed generators match the degree signatures of T , O, and I.
For the tetrahedral group T , it suffices to check that
(a) xyz ∈
/ R[x2 + y 2 + z 2 ], and
(b) x4 + y 4 + z 4 ∈
/ R[x2 + y 2 + z 2 , xyz].
For (a), we note simply that R[x2 + y 2 + z 2 ] has no polynomials of odd degree. For (b),
it suffices to check that x4 + y 4 + z 4 is not a linear multiple of (x2 + y 2 + z 2 )2 , which is
clear since the latter has mixed terms such as 2x2 y 2 .
For the octahedral group O, we need to check that
(a) x4 + y 4 + z 4 ∈
/ R[x2 + y 2 + z 2 ], and
(b) x2 y 2 z 2 ∈
/ R[x2 + y 2 + z 2 , x4 + y 4 + z 4 ].
We just argued (a) for the tetrahedral group above. For (b), there is no linear dependence
between (x2 + y 2 + z 2 )3 , (x2 + y 2 + z 2 )(x4 + y 4 + z 4 ), and x2 y 2 z 2 since the 3 × 3 matrix
Polynomial
Coefficient of
x x4 y 2 x2 y 2 z 2
1
3
6
1
1
0
0
0
1
6
(x2 + y 2 + z 2 )3
(x2 + y 2 + z 2 )(x4 + y 4 + z 4 )
x2 y 2 z 2
is invertible.
Finally, for the icosahedral group I, we want to show that
(a) P ∈
/ R[x2 + y 2 + z 2 ], and
(b) Q ∈
/ R[x2 + y 2 + z 2 , P ].
36
For (a), note that the 2 × 2 matrix
Polynomial
(x2 + y 2 + z 2 )3
P
Coefficient of
x6
x4 y 2
1
3
0
−φ2
is invertible. Similarly, for (b), the matrix
Polynomial
Coefficient of
x
x8 y 2 x8 z 2
1
5
6
2
0 −φ
φ4
0 −φ4
φ8
10
(x2 + y 2 + z 2 )5
(x2 + y 2 + z 2 )2 · P
Q
is invertible since dividing the second row by φ2 and the third row by φ4 makes the second
entries of these rows equal, but makes the third entries φ2 )= φ4 .
This concludes our discussion of specific groups of symmetries. In the next chapter,
we present a proof of the Main Theorem.
37
Chapter 6
Proof of the Main Theorem
In this final chapter we will give a detailed proof of the Main Theorem stated in Section
1.2. The tools used in the proof are elementary, but several of the arguments are fairly
complicated nonetheless. Some of the key ideas involved in the proof are induction on
homogeneous degrees, the relation between the ring of invariants and the G-fixed subfield,
and studying the poles of Poincaré series.
6.1
Setup
The following notation is assumed unless otherwise specified:
• V a vector space of dimension n over a field K of characteristic 0.
• G a finite group of invertible linear transformations of V .
• K[V ] = K[x1 , . . . , xn ] the ring of polynomial functions on V .
• K[V ]G the ring of invariants.
• K(V ) the field of fractions of K[V ], with G-fixed subfield K(V )G .
• s(G) the set of all pseudoreflections in G.
• I the ideal of K[V ] generated by all homogeneous elements of K[V ]G of strictly
positive degrees.
6.2
Background
We begin by establishing some well-known results that we will need.
Proposition 4.
(a) K[V ] is integral over K[V ]G .
38
(b) K[V ]G is finitely generated as an algebra over K.
(c) There exist homogeneous f1 , . . . , fr ∈ K[V ]G that give an ideal basis for I (i.e. the
fi generate I and none of the fi are in the ideal generated by all the others).
Proof. (a): For any f ∈ K[V ], the polynomial
!
Pf (t) :=
(t − σ(f ))
σ∈G
is monic with coefficients that are symmetric polynomials in the elements of G applied
to f , hence invariants, and Pf (f ) = 0 (look at the factor corresponding to the identity
of G).
(b): By (a), each xi satisfies an equation of the form
xdi i + ai,1 xdi i −1 + · · · + ai,di = 0,
ai,j ∈ K[V ]G .
Set A := K[{ai,j }]. Then K[V ] is integral over A, hence K[V ] is a finitely generated
A-module. Since A is a Noetherian ring, K[V ] is a Noetherian A-module, thus the Asubmodule K[V ]G is finitely generated over A. Combining the generators of K[V ]G over
A with the {ai,j } gives a finite generating set for K[V ]G as an algebra over K.
(c): By (b), let K[V ]G = K[a1 , . . . , am ]. Since a polynomial f ∈ K[V ] is invariant
if and only if each homogeneous component of f is invariant (G is a group of linear
transformations), we may assume the ai to be homogeneous of strictly positive degrees.
Thus I = (a1 , . . . , am ) * K[V ], and removing redundant elements, we may assume the
{ai } are an ideal basis.
Recall that the elements of G are invertible linear transformations of V , which also
give ring automorphisms of K[V ] by the definition
σ(f )(v) := f (σ −1 (v)),
σ ∈ G, f ∈ K[V ], v ∈ V.
This same definition allows us to view σ ∈ G as field automorphisms of the field of
fractions K(V ) of K[V ], simply by considering f ∈ K(V ) instead of f ∈ K[V ]. This
puts the tools developed for studying field extensions at our disposal, which will be very
useful due to the following proposition.
Proposition 5.
(a) The G-fixed subfield K(V )G of K(V ) coincides with the field of fractions of K[V ]G .
(b) If g1 , . . . , gr generate K[V ]G as a K-algebra, then g1 , . . . , gr also generate K(V )G
as a field extension of K.
(c) K(V ) is a Galois extension of K(V )G of degree |G|.
39
Proof. (a): For any f /g ∈ K(V ), we may assume g ∈ K[V ]G since we can write
'
f · id'=σ∈G σ(g)
f
'
=
.
g
σ∈G σ(g)
But if f /g ∈ K(V )G and g ∈ K[V ]G , then clearly f ∈ K[V ]G as well.
(b): Follows immediately from (a).
(c): K(V )G is the fixed field of the group of automorphisms G.
6.3
Main Theorem
We begin with a definition that will serve as a stepping stone in our proof of the Main
Theorem.
Definition 4. Let us say that G has the property P if the following holds:
(P): For any g1 , . . . , gm ∈ K[V ]G such that g1 ∈
/ (g2 , . . . , gm ) * K[V ]G , if h1 , . . . , hm ∈
K[V ] are homogeneous polynomials such that h1 g1 + · · · + hm gm = 0, then h1 ∈ I.
Main Theorem. Let G be a finite group of invertible linear transformations of an ndimensional vector space V over a field K of characteristic 0. Then the following are
equivalent:
(i) G is generated by pseudoreflections.
(ii) G has property P .
(iii) K[V ]G is a polynomial ring in n = dim V homogeneous generators.
(iv) K[V ] is a free module over K[V ]G with a basis consisting of |G| homogeneous polynomials.
We will prove the theorem by showing that (i) =⇒ (ii) =⇒ (iii) =⇒ (i) and (ii) ⇐⇒ (iv),
in that order. The proofs (i) =⇒ (ii) =⇒ (iii) and (ii) =⇒ (iv) are based on Chevalley
[3], while the proof (iii) =⇒ (i) is from Neusel [5].
Definition 5. We will make use of the averaging projection K[V ]
by
1 "
π G (f ) :=
σ(f ),
f ∈ K[V ].
|G| σ∈G
40
πG
!
K[V ]G , defined
6.3.1
Proving (i) =⇒ (ii)
Proposition 6 ((i) =⇒ (ii)). If G is generated by pseudoreflections, then G has property
P.
Proof. Assume G is generated by pseudoreflections. Suppose g1 , . . . , gm ∈ K[V ]G such
that g1 ∈
/ (g2 , . . . , gm ) * K[V ]G , and that h1 , . . . , hm ∈ K[V ] are homogeneous and satisfy
h1 g1 + · · · + hm gm = 0.
(∗)
We need to prove that h1 ∈ I.
We use induction on deg h1 . If deg h1 = 0, then applying π G to (∗) yields
π G (h1 )g1 + · · · + π G (hm )gm = 0,
which implies π G (h1 ) = 0, since otherwise g1 ∈ (g2 , . . . , gm ) * K[V ]G , a contradiction.
But this means h1 = 0 ∈ I.
So assume d := deg h1 > 0 and that the claim holds for all homogeneous polynomials
of degree < d. If σ ∈ G is a pseudoreflection fixing the hyperplane (L = 0), then σ −1
fixes the same hyperplane. Thus σ(hi ) − hi vanishes on (L = 0) for each i, so there exist
homogeneous polynomials hi such that σ(hi ) − hi = hi L. Applying σ to (∗), subtracting
(∗), and canceling the common factor L, we see that
h1 g1 + · · · + hm gm = 0,
whence h1 ∈ I by the inductive hypothesis. Thus σ(h1 ) ≡ h1 (mod I), and since this
holds for each pseodoreflection in G, it holds for any σ ∈ G since G is generated by
pseodoreflections. Thus π G (h1 ) ≡ h1 (mod I), so since h1 homogeneous of strictly positive degree and π G (h1 ) ∈ K[V ]G together imply π G (h1 ) ∈ I, we see that h1 ∈ I as
desired.
6.3.2
Proving (ii) =⇒ (iii)
We break up the proof into three main steps, given by the following proposition.
Proposition 7 ((ii) =⇒ (iii)). Suppose G has property P . Let f1 , . . . , fr ∈ K[V ]G be
homogeneous invariants giving an ideal basis of I. Then
(a) the fi are algebraically independent over K.
(b) K[f1 , . . . , fr ] = K[V ]G .
(c) r = n.
Proof of (a). Write di for the degree of fi . Assume the claim is false and let H(y1 , . . . , yr )
be a polynomial with coefficients in K such that H(f1 , . . . , fr ) = 0 is a nontrivial relation
41
of minimum homogeneous degree D in the xi . Each monomial y1k1 · · · yrkr of H(y1 , . . . , ym )
satisfies
k1 · d1 + · · · + kr · dr = D.
Since H is not constant the partial derivatives ∂yi H are not all zero. Set
(1 ≤ i ≤ r),
Hi := ∂yi H(f1 , . . . , fr )
which are in K[V ]G and either vanish or are homogeneous of degree D − di . The Hi are
not all zero since the ∂yi H are not all zero and since H(f1 , . . . , fr ) is a relation among the
fi of minimum degree. After reordering, we may assume H1 )= 0 and that all the Hi are
in the ideal generated in K[V ]G by the first s ≥ 1 of them, but that none of H1 , . . . , Hs
belongs to the ideal generated by the other Hj (1 ≤ j ≤ s) in K[V ]G . Write
Hs+j =
s
"
(1 ≤ j ≤ r − s),
gj,i Hi
i=1
where each gj,i ∈ K[V ]G is 0 or homogeneous of degree (D−ds+j )−(D−di ) = di −ds+j ≥ 0.
Differentiating the relation H(f1 , . . . , fr ) = 0 in xk , the chain rule yields
r
"
i=1
H i · ∂ xk f i = 0
(1 ≤ k ≤ n),
and substituting for all the Hs+j yields a relation in H1 , . . . , Hs in which the coefficient
of Hi is
r−s
"
Ci,k := ∂xk fi +
gj,i ∂xk fs+j
(1 ≤ i ≤ s; 1 ≤ k ≤ n).
j=1
The coefficient Ci,k is either 0 or homogeneous of degree di −1 since deg gj,i +deg ∂xk fs+j =
di − ds+j + ds+j − 1 = di − 1. Since the Hi are in K[V ]G and none of H1 , . . . , Hs belongs
to the ideal in K[V ]G generated by the other Hj , the fact that G has property P allows
us to conclude that each Ci,k is in I. Since f1 , . . . , fr is an ideal basis for I, this means
that
r
"
Ci,k =
ai,k,l fl
(1 ≤ i ≤ s; 1 ≤ k ≤ n),
l=1
for homogeneous ai,k,l ∈ K[V ] that are each 0 or of degree di − dl − 1 ≥ 0. Now we use
the identity ∂x1 f · x1 + · · · + ∂xn f · xn = (deg f ) · f to write
di fi +
r−s
"
gj,i ds+j fs+j =
j=1
n
"
k=1
Ci,k xk =
r
"
bi,l fl ,
l=1
where each bi,l ∈ (x1 , . . . , xn ) * K[V ] is 0 or of degree di − dl ≥ 1, so that in particular
bi,i = 0. But since di is invertible, this means that fi belongs to the ideal generated by
the other fj , which is a contradiction. Thus f1 , . . . , fr are algebraically independent.
42
Proof of (b). Since a polynomial is invariant if and only if its homogeneous components
are invariant (G is a group of linear transformations), it suffices to prove that any homogeneous g ∈ K[V ]G is in K[f1 , . . . , fr ]. We proceed by induction on deg g = d. If d = 0,
then g ∈ K ⊆ K[f1 , . . . , fr ].
Suppose d ≥ 1 and any homogeneous invariant of degree < d is in K[f1 , . . . , fr ]. If g
is invariant and deg g = d, then g ∈ I, so
g = a1 f1 + · · · + ar fr ,
ai ∈ K[V ].
(∗)
We may assume the ai are homogeneous with deg ai + deg fi = d when ai )= 0. Hitting
(∗) with the projection π G , we may also assume each ai ∈ K[V ]G . Since the fi are
not constant, each ai must have degree < d, so the inductive assumption completes the
argument.
Proof of (c). Let f1 , . . . , fr be homogeneous invariants that form an ideal basis of I,
which are algebraically independent by (a) and which generate K[V ]G by (b). By Proposition 5 (b), f1 , . . . , fr generate K(V )G as a field extension of K, hence K(V )G /K has
transcendence degree r. Now, K(V )/K(V )G is Galois of finite degree |G| (in particular
algebraic), so the two fields have the same transcendence degree n as extensions of K,
whence r = n.
6.3.3
Proving (iii) =⇒ (i)
We begin by introducing Poincaré series, which will play a key role in this proof.
Definition ;
6. A graded vector space of finite type over a field K is a K-vector
space W = i≥0 Wi , where each Wi is a K-vector space of finite dimension. If W is a
graded vector space of finite type, then the Poincaré series of W is the formal power
series
"
P (W, t) =
dim Wi · ti .
i≥0
Note that P (W, 1) = dim W if the dimension is finite. Also, Poincaré series are additive
under direct sums and multiplicative under tensor products: if W and W % are graded
vector spaces of finite type, then
P (W ⊕ W % , t) = P (W, t) + P (W % , t)
and
P (W ⊗ W % , t) = P (W, t) · P (W % , t).
The graded vector spaces we will consider are polynomial rings over the field K,
graded by polynomial degree. If f is a homogeneous polynomial of degree d, then
P (K[f ], t) = 1 + td + t2d + · · · =
1
,
1 − td
from which we deduce, using multiplicativity under tensor powers, that:
43
Proposition 8. Let K[f1 , . . . , fr ] be a polynomial ring in r homogeneous generators,
with di the degree of fi . Then
P (K[f1 , . . . , fr ], t) =
r
!
i=1
1
.
1 − tdi
Now if σ ∈ G, then σ acts on both V and on K[V ]. Unless otherwise specified, the
action is assumed to be on V , as in the determinant in the proposition below. We write
tr(σ, K[V ]j ) to denote the trace of σ acting on K[V ] restricted to the graded piece K[V ]j .
Proposition 9. If σ ∈ G, then
∞
"
j=0
tr(σ, K[V ]j ) · tj =
1
.
det(1 − σ −1 t)
(∗)
Proof. Neither side of (∗) is changed by extending the field, so we may assume K is
algebraically closed. Then we can choose a basis for V such that σ is diagonal with
eigenvalues λ1 , . . . , λn . Letting x1 , . . . , xn be the dual basis for V ∗ , the eigenvalues of σ
−1
acting on V ∗ are λ−1
1 , . . . , λn , so the eigenvalues of σ acting on K[V ]j , which has a basis
consisting of the degree j monomials in the xi , are all the products of j not necessarily
distinct λ−1
i s. Thus the left side of (∗) is equal to
9∞
:
9∞
:
n
" −j
"
!
1
1
j
−j j
,
λ1 t · · ·
λn t =
−1 =
det(1 − σ −1 t)
1 − λi t
j=0
j=0
i=1
as claimed.
Proposition 10 (Molien’s theorem).
1 "
1
1 "
1
P (K[V ]G , t) =
=
.
−1
|G| σ∈G det(1 − σ t)
|G| σ∈G det(1 − σt)
Proof. Recall the projection K[V ]
projections K[V ]j
! K[V ]G
j
πG
!
K[V ]G defined by
1
|G|
(
σ∈G
σ. Since π G induces
of the graded pieces, the trace tr(π G , K[V ]j ) of π G re-
stricted to K[V ]j is equal to dim K[V ]G
j . Thus
G
P (K[V ] , t) =
=
∞
"
j=0
∞
"
j=0
=
∞
"
j=0
j
(dim K[V ]G
j )·t
tr(π G , K[V ]j ) · tj
9
1 "
tr(σ, K[V ]j )
|G| σ∈G
:
· tj .
The result now follows by interchanging the order of summation and applying Proposition
9.
44
Proposition 11. The Laurent expansion of the Poincaré series P (K[V ]G , t) at t = 1
begins as follows:
G
P (K[V ] , t) =
1
|G|
(1 − t)n
+
(1
|s(G)|
2|G|
− t)n−1
+ ··· ,
where the remaining terms have a pole of order at most n − 2 at t = 1.
1
Proof. The term det(1−σt)
has a pole at t = 1 of order equal to the multiplicity of the
eigenvalue 1 for σ. For the identity id ∈ G, this multiplicity is n, while for any other
element of G the multiplicity is ≤ n − 1. By Proposition 10, P (K[V ]G , t) is a rational
function in t with only possible poles at the eigenvalues of the elements of G. By what
we just discussed, (1 − t)n P (K[V ]G , t) no longer has a pole at t = 1 and is therefore
holomorphic in a neighborhood of t = 1. So P (K[V ]G , t) is holomorphic in that neighborhood except at the pole t = 1, hence it makes sense to consider the Laurent series of
P (K[V ]G , t) at t = 1.
The coefficient of the term 1/(1 − t)n is determined solely by id, so it is 1/|G|.
The coefficient of the term involving 1/(1 − t)n−1 can be computed by multiplying
1
1
P (K[V ]G , t) − |G|
by (1 − t)n−1 and evaluating at t = 1. The only terms not
(1−t)n
killed are those corresponding to σ ∈ G that have eigenvalue 1 with multiplicity precisely
n − 1, namely the terms corresponding to the pseudoreflections. The contribution of each
pseudoreflection σ to the coefficient of the term involving 1/(1 − t)n−1 is
<
<
1
1
1
n−1
< = 1
(1 − t)
,
<
|G|
det(1 − σt) t=1 |G| 1 − λσ
where λσ )= 1 is the only non-1 eigenvalue of σ. If σ has order 2, then λσ = −1, whence
the contribution of σ is 1/2|G|. Otherwise σ −1 is also a pseudoreflection with λσ−1 = λ−1
σ ,
and we have the identity
(1 − λσ ) + (1 − λ−1
1
1
σ )
+
=
= 1,
1 − λσ 1 − λ−1
2 − λσ − λ−1
σ
σ
so once again we can think of each of σ, σ −1 as contributing 1/2|G|. Thus the total
contribution of all the pseudoreflections is |s(G)|/2|G|, hence this is the coefficient of
1/(1 − t)n−1 in the Laurent expansion.
Proposition 12. Suppose K[V ]G is a polynomial ring generated by n homogeneous invariants f1 , . . . , fn of degrees d1 , . . . , dn . Then
|G| =
n
!
|s(G)| =
di ,
i=1
n
"
i=1
(di − 1).
Proof. Combining Propositions 8 and 11, we get
n
!
i=1
|s(G)|
1
1
|G|
2|G|
=
+
+ ···
d
n
i
1−t
(1 − t)
(1 − t)n−1
45
as a Laurent expansion at t = 1. Multiplying both sides by (1 − t)n gives
n
!
i=1
1
1
|s(G)|
=
+
(1
−
t)
+ ··· ,
1 + t + t2 + · · · + tdi −1
|G|
2|G|
(∗)
where the remaining terms are divisible by (1 − t)2 . Substituting t = 1 in (∗) shows that
'
n
i=1 di = |G|. To prove the second identity, we will simply differentiate (∗) by t and
then evaluate at t = 1. On the right side, we get −|s(G)|/2|G|. Now we will compute the
derivative of the left side. Set Ti (t) := 1 + t + t2 + · · · + tdi −1 for notational convenience.
Differentiating the left side using product rule and chain rule yields
*
n )
"
1 + 2t + 3t2 + · · · + (di − 1)tdi −2
.
−
'
Ti (t)2 · j'=i Tj (t)
i=1
Substituting t = 1, note that Ti (1) = di and that 1 + 2 + · · · + (di − 1) =
i, so the above yields
−
Thus |s(G)| =
(n
i=1 (di
n
"
di (di −1)
'2n
d
·
j=1 di
i=1 i
di (di −1)
2
for each
n
=−
1 "
(di − 1).
2|G| i=1
− 1), as claimed.
We are almost ready to prove that (iii) =⇒ (i), but we will need a general fact:
Proposition 13. Let K[y1 , . . . , ym ] be a polynomial ring. Let
{g1 , . . . , gr } of degrees d1 ≤ · · · ≤ dr
{h1 , . . . , hs } of degrees e1 ≤ · · · ≤ es
be algebraically independent sets of homogeneous polynomials in K[y1 , . . . , ym ], such that
K[g1 , . . . , gr ] ⊆ K[h1 , . . . , hs ]. Then
(a) r ≤ s ≤ m;
(b) di ≥ ei for each 1 ≤ i ≤ r;
(c) if r = s then the following are equivalent:
(i) K[g1 , . . . , gr ] = K[h1 , . . . , hr ];
(ii) di = ei for all 1 ≤ i ≤ r;
'
'
(iii) ri=1 di = ri=1 ei .
46
Proof. (a): This follows immediately from algebraic independence and the additivity of
the transcendence degrees of the field extensions
K(y1 , . . . , ym ) ⊇ K(h1 , . . . , hs ) ⊇ K(g1 , . . . , gr ) ⊇ K.
(b): Since each gi ∈ K[h1 , . . . , hs ], gi is generated by the hj with degree no larger
than di . The stated claim will follow if we can show that for each k > 0,
#{di : di ≤ k} ≤ #{ei : ei ≤ k}.
Suppose this is not true for some k0 > 0. Then there is some i0 > 0 such that
d1 ≤ · · · ≤ di0 ≤ k0 and e1 ≤ · · · ≤ ei0 −1 ≤ k0 , with ei0 > k0 . But then K(g1 , . . . , gi0 ) ⊆
K(h1 , . . . , hi0 −1 ), contradicting the additivity of the transcendence degrees of these extensions over K.
(c): Since K[g1 , . . . , gr ] ⊆ K[h1 , . . . , hr ], we have K[g1 , . . . , gr ] = K[h'
1 , . . . , hr ] ⇐⇒
Pt (K[g1 , . . . , gr ]) = Pt (K[h
Noting that Pt (K[g1 , . . . , gr ]) = ri=1 (1 − tdi )−1
'r1 , . . . , hre]).
and Pt (K[h1 , . . . , hr ]) = i=1 (1 − t i )−1 now gives (i) ⇐⇒ (ii). (ii) =⇒ (iii) is trivial,
and the converse follows immediately from (b).
We are finally ready to prove that (iii) =⇒ (i) in the Main Theorem.
Proposition 14 ((iii) =⇒ (i)). Suppose K[V ]G is a polynomial ring in the n homogeneous
generators f1 , . . . , fn . Then G is generated by pseudoreflections.
Proof. Write di for the degree of fi , with d1 ≤ · · · ≤ dn . Let H be the subgroup of G
generated by all pseudoreflections of G. Since H is generated by pseudoreflections, K[V ]H
is a polynomial ring with homogeneous generators h1 , . . . , hn of degrees e1 ≤ · · · ≤ en .
Since H ≤ G, K[V ]G ⊆ K[V ]H , so each fi ∈
n ]. By Proposition 13 (b),
(K[h1 , . . . , h(
ei ≤ di for each i. But |s(G)| = |s(H)|
implies
(d
−
1)
=
(ei − 1) by Proposition 12,
i
'
'
whence ei = di for each i. Thus di = ei , which implies |G| = |H| by Proposition 12,
whence G = H as claimed.
6.3.4
Proving (ii) ⇐⇒ (iv)
We break up the proof of (ii) =⇒ (iv) into five steps.
Proposition 15 ((ii) =⇒ (iv)). Suppose G has property P .
(a) K[V ]G is a polynomial ring in n homogeneous generators f1 , . . . , fn , where the fi
form an ideal basis of I.
(b) Let h1 , . . . , hs ∈ K[V ] be homogeneous with residue classes modulo I linearly independent over K in K[V ]/I. Then h1 , . . . , hs are linearly independent over K(V )G .
(c) K[V ]/I is a finite-dimensional vector space over K and has a basis given by the
residues of homogeneous polynomials A1 , . . . , At ∈ K[V ].
(d) K[V ] is a finitely-generated free K[V ]G -module generated by A1 , . . . , At .
47
(e) t = |G|.
Proof of (a). This is Proposition 7.
Proof of (b). Suppose ai ∈ K(V )G for each 1 ≤ i ≤ s such that
a1 h1 + · · · + as hs = 0.
(∗)
We want to prove that each ai = 0. By clearing denominators and restricting to homogeneous parts, we may assume each ai ∈ K[V ]G and homogeneous, such that for each i
and some constant D, either ai = 0 or deg ai + deg hi = D.
Let di denote the degree of fi . Consider the sequence {Sj }j≥1 of monomials f1k1 · · · fnkn
arranged in increasing order of degree k1 ·d1 +· · ·+kn ·dn , with S1 = 1. Since ai ∈ K[V ]G ,
we can write
"
ai =
λij Sj ,
λij ∈ K and λij = 0 when deg ai )= deg Sj .
j≥1
Substituting into (∗), we get
"
j≥1
bj Sj = 0,
9
bj =
s
"
i=1
λij hi
:
,
(∗∗)
where each bj is either 0 or homogeneous of degree D − deg Sj ≥ 0.
Assume for contradiction that the λij are not all 0. Then let N ≥ 1 be the maximum
integer such that λij = 0 for all 1 ≤ i ≤ s and all j < N . By the algebraic independence
of the fi , SN does not belong to the ideal generated in K[V ]G by the Sj with j > N , so
since G has property P we deduce from the first relation in (∗∗) that bN ∈ I. But then
the equation for bN in (∗∗), together with the linear independence of the residue classes
of hi modulo I, imply that λiN = 0 for all 1 ≤ i ≤ s, contradicting the maximality of N .
So the λij are all 0, whence the ai are all 0, as desired.
Proof of (c). K(V )/K(V )G is a Galois extension of finite degree |G|. By (b), this implies
that K[V ]/I has finite dimension ≤ |G|, say t. Since K[V ]/I inherits the grading of
K[V ], we may choose a homogeneous basis for K[V ]/I, and let A1 , . . . , At ∈ K[V ] be
homogeneous polynomials whose residues modulo I give the basis.
Proof of (d). We will show that for each P ∈ K[V ], there are unique invariants gi ∈
K[V ]G such that
P = g1 A1 + · · · + gt At ,
namely that A1 , . . . , At generate K[V ] freely as a K[V ]G -module. For uniqueness, we
note simply that the Ai are linearly independent over K[V ]G by (b). For existence, we
may assume P is homogeneous of degree d ≥ 0, and we will use induction on d. Assume
that all polynomials of K[V ] of degree < d can be expressed as linear combinations of
48
the Ai with coefficients in K[V ]G . Since the residues of the Ai are a basis of K[V ]/I, we
can choose λ1 , . . . , λt ∈ K such that
P % := P − (λ1 A1 + · · · + λt At ) ∈ I,
where P % is either 0 or homogeneous of degree d. Since the fi form an ideal basis of I by
(a), choose homogeneous Q1 , . . . , Qn ∈ K[V ] such that
P % = Q1 f 1 + · · · + Qn f n .
Since each Qi is either 0 or has degree < d, applying the inductive assumption to the Qi
and substituting into the defining equation for P % gives the desired result.
Proof of (e). Each element of K(V ) may be written as the quotient of a polynomial by
an invariant. Thus by (d), we see that the Ai form a basis of K(V ) as a field extension
over K(V )G , whence t = |G|.
At last, we are ready to prove the final link in the chain of implications, which will
complete the proof of the Main Theorem.
Proposition 16 ((iv) =⇒ (ii)). Suppose K[V ] is a free module over K[V ]G with basis
consisting of |G| homogeneous polynomials. Then G has property P .
Proof. Let A1 , . . . , A|G| ∈ K[V ] be the basis of homogeneous polynomials. Suppose
g1 , . . . , gm ∈ K[V ]G such that g1 ∈
/ (g2 , . . . , gm ) * K[V ]G and that h1 , . . . , hm ∈ K[V ]
homogeneous such that
h1 g1 + · · · + hm gm = 0.
(∗)
We want to show that h1 ∈ I. Let
αij ∈ K[V ]G homogeneous
hi = αi1 A1 + · · · + αi|G| A|G| ,
be the unique expression of each hi in the module basis. Substituting into (∗) gives the
relation
9
:
m
"
β1 A1 + · · · + β|G| A|G| = 0,
βi =
αji gj ∈ K[V ]G
j=1
whence we must have βi = 0 for each i since A1 , . . . , A|G| are a basis. The condition that
g1 ∈
/ (g2 , . . . , gm ) implies that each α1i must be either 0 or have strictly positive degree,
and thus α1i ∈ I for each i. So each term of the above expression for h1 is in I, whence
h1 ∈ I.
49
Bibliography
[1] M. Artin. Algebra. Prentice Hall, New Jersey, 1991.
[2] D. J. Benson. Polynomial invariants of finite groups. Cambridge University Press,
1993.
[3] C. Chevalley. Invariants of finite groups generated by reflections. Amer. J. of Math.
77 (1955), 778-782.
[4] H. S. M. Coxeter. Regular polytopes (2nd ed.) The Macmillan Company, New York,
1963.
[5] M. D. Neusel and L. Smith. Invariant theory of finite groups. American Mathematical
Society, 2002.
[6] G. C. Shephard and J. A. Todd. Finite unitary reflection groups. Canad. J. of Math.
6 (1954), 274-304.
[7] T. A. Springer. Invariant theory. Springer Lecture Notes in Mathematics 585.
Springer-Verlag, Berlin/New York, 1977.
50