On the Solution of the Elliptic Interface
advertisement

On the Solution of the Elliptic Interface
Problems by Difference Potentials Method
Yekaterina Epshteyn and Michael Medvinsky
Abstract Designing numerical methods with high-order accuracy for problems in
irregular domains and/or with interfaces is crucial for the accurate solution of many
problems with physical and biological applications. The major challenge here is to
design an efficient and accurate numerical method that can capture certain properties
of analytical solutions in different domains/subdomains while handling arbitrary geometries and complex structures of the domains. Moreover, in general, any standard
method (finite-difference, finite-element, etc.) will fail to produce accurate solutions
to interface problems due to discontinuities in the model’s parameters/solutions. In
this work, we consider Difference Potentials Method (DPM) as an efficient and accurate solver for the variable coefficient elliptic interface problems.
1 Introduction
In this paper, we consider Difference Potentials Method (DPM) as an efficient and
accurate solver for variable coefficient elliptic interface problems. DPM can be understood as the discrete version of the method of generalized Calderon’s potentials
and Calderon’s boundary equations with projections in the theory of partial differential equations (PDEs). DPM introduces a computationally simple auxiliary domain.
The original domain of the problem is embedded into an auxiliary domain, and the
auxiliary domain is discretized using simple structured grids, e.g. Cartesian grids.
After that, the main idea of DPM is to define a Difference Potentials operator, and to
reformulate the original discretized PDEs (without imposed boundary/interface conditions yet) as equivalent discrete generalized Calderon’s boundary equations with
projections (BEP). These BEP are supplemented by the given boundary/interface
Yekaterina Epshteyn
Department of Mathematics, The University Of Utah, e-mail: epshteyn@math.utah.edu
Michael Medvinsky
Department of Mathematics, The University Of Utah, e-mail: mmedvin@math.utah.edu
1
2
Yekaterina Epshteyn and Michael Medvinsky
conditions (the resulting BEP are always well-posed, as long as the original problem is well-posed), and solved to obtain the values of the solution at the points near
the continuous boundary of the original domain (at the points of the discrete grid
boundary which approximates the continuous boundary from the inside and outside of the domain). Using the obtained values of the solution at the discrete grid
boundary, the approximation to the solution in the original domain is constructed
through the discrete generalized Green’s formula. DPM offers geometric flexibility (without the use of unstructured meshes or “body-fitted” meshes), but does not
require explicit knowledge of the fundamental solution, is not limited to constant coefficient problems or linear problems, does not involve singular integrals, and can
handle general boundary and/or interface conditions. The reader can consult [18]
and [14, 15] for a detailed theoretical study of the methods based on Difference Potentials, and ([18, 16, 21, 12, 11, 13, 8, 20, 19, 17, 4, 7, 6, 1], etc.) for the recent
developments and applications of DPM.
In this paper, we extend the work on DPM for the elliptic interface problems
started in [19, 17, 6] to variable coefficient elliptic interface models in 2D. A more
detailed presentation of DPM for elliptic (and parabolic interface problems) in 2D
with different high-order accurate discretizations, as well as the analysis of DPM
for the interface problems will be part of the future publications [5], [2].
The paper is organized as follows. In Section 2, we introduce the formulation
of the problem. Next, in Section 2.1 we briefly describe the main building blocks
of the DPM. Finally, we illustrate the performance of the proposed DPM, as well
as compare DPM with the Mayo’s method [10], [3] and the Immersed Interface
Method (IIM) [9], [3] in several challenging numerical experiments (performed by
M. Medvinsky) in Section 2.2.
2 Elliptic Interface Problem
In this work we consider interface/composite domain problem defined in some
bounded domain D0 ⊂ R2 :
(
L1 uD1 = f1 (x, y) (x, y) ∈ D1
LD u =
(1)
L2 uD2 = f2 (x, y) (x, y) ∈ D2
subject to the appropriate interface conditions:
uD1 − uD2 = φ1 (x, y),
Γ
Γ
∂u ∂ uD1 − D2 = φ2 (x, y)
∂ n Γ
∂ n Γ
(2)
and boundary conditions
u|∂ D = ψ(x, y)
(3)
where D1 ∪ D2 = D and D ⊂ D0 , see Fig. 1. Here, we assume Ls , s ∈ {1, 2} are the
second-order linear elliptic differential operators of the form
On the Solution of the Elliptic Interface Problems by Difference Potentials Method
Ls uDs ≡
∂ uDs ∂ ∂ uDs ∂ as (x, y)
+
bs (x, y)
,
∂x
∂x
∂y
∂y
The functions as (x, y) ≥ 1 and bs (x, y) ≥ 1
are sufficiently smooth and defined in a
larger auxiliary subdomains Ds ⊂ D0s .The
functions fs (x, y) are sufficiently smooth
functions defined in each subdomain Ds .
We assume that the continuous problem (1)-(3) is well-posed. Moreover, we
assume that the operators Ls are welldefined on some larger auxiliary domain
D0s . More precisely, we assume that for
any sufficiently smooth functions fs (x, y)
the equations Ls uD0s = fs (x, y) have a
unique solution uD0s on D0s that satisfy the
given boundary conditions on ∂ D0s .
Note, here and below, the upper/or lower
guish between the subdomains.
3
s ∈ {1, 2}.
D2=D0\D1"
Г"
γ
D1"
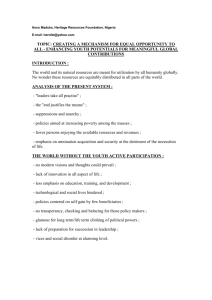
Fig. 1 Example of an auxiliary domain D0 ,
original domains D1 and D2 separated by the
interface Γ , and the example of the points in
the discrete grid boundary set γ for the 5-point
stencil of the second-order method. Auxiliary
domain D0 coincides with D here.
index s ∈ {1, 2} is introduced to distin-
2.1 Difference Potentials Method for Interface/Composite Domain
Problems
Here we discuss the development of high-order methods based on Difference Potentials approach for the elliptic interface/composite domain problem (1)-(3). Below,
we only briefly discuss main ideas of DPM for interface problems. The reader can
consult [18, 19, 17, 6, 1] and future publications [5, 2] for more details. Also, the
reader can consult [18] for the detailed discussion on the general theory and numerical analysis of DPM. Let us briefly describe the main steps of the algorithm.
Introduction of the Auxiliary Domain: Place the original domains Ds , s ∈
{1, 2} in the auxiliary computationally simple domains D0s ⊂ R2 that we will choose
to be squares. Next, introduce a Cartesian mesh for each D0s , with points xsj =
j∆ xs , ysk = k∆ ys , (k, j = 0, ±1, ...). Let us assume for simplicity that ∆ xs = ∆ ys := hs .
Select discretization of the continuous model (1), for example here we will consider
a finite-difference approximation. Next, define a finite-difference stencil N sj,k with
its center placed at (xsj , ysk ) (like a 5 node “dimension by dimension stencil” for the
second-order scheme, or a 9 node “dimension by dimension stencil” for the classical fourth-order scheme, etc.). Additionally, introduce the point sets Ms0 (the set of
all the mesh nodes (xsj , ysk ) that belong to the interior of the auxiliary domain D0s ),
Ms+ := Ms0 ∩Ds (the set of all the mesh nodes (xsj , ysk ) that belong to the interior of the
original domain Ds ), and by Ms− := Ms0 \Ms+ (the set of all the mesh nodes (xsj , ysk )
that are inside of the auxiliary domain D0s but don’t belong to the interior of the
4
Yekaterina Epshteyn and Michael Medvinsky
original domain Ds ). Define Ns+ := { j,k N sj,k |(xsj , ysk ) ∈ Ms+ } (the set of all points
covered by the stencil N sj,k when center point (xsj , ysk ) of the stencil goes through all
S
the points of the set Ms+ ⊂ Ds ). Similarly, define Ns− := { j,k N sj,k |(x j , yk ) ∈ Ms− }
(the set of all points covered by the stencil N sj,k when center point (xsj , ysk ) of the
stencil goes through all the points of the set Ms− ).
Introduce γs := Ns+ ∩ Ns− . The set γs is called the discrete grid
boundary. The
S
mesh nodes from set γs straddle the boundary ∂ Ds . Ns0 := { j,k N sj,k |(xsj , ysk ) ∈
S
Ms0 } ⊂ D0s . The sets Ns0 , Ms0 , Ns+ , Ns− , Ms+ , Ms− , γs will be used to develop the
method based on the Difference Potentials approach, Fig. 1.
Difference Equations: The discrete reformulation of the model problem (1) in
each auxiliary domain D0s is: solve for usj,k ∈ Ns+
s
Lhs [usj,k ] = Fj,k
,
(xsj , ysk ) ∈ Ms+
(4)
where Lhs [usj,k ] is the discrete linear elliptic operator obtained using finite-difference
approximation of order r (for example, the second-order r = 2 or the fourth-order
s denotes the discrete right-hand side. The unknowns are us :≈
r = 4, etc.). Fj,k
j,k
s
s
uDs (x j , yk ), where (xsj , ysk ) is a mesh point of the Cartesian grid.
We need to complete the linear system of difference equations (4) with the appropriate choice of the numerical boundary and interface conditions to construct
a unique accurate approximation of the continuous problem (1)-(3) in domain D.
Thus, to design an efficient algorithm for any type of boundary and interface conditions, we will consider a numerical method based on the idea of the Difference
Potentials.
s ,
Step 1: Construction of a Particular Solution: Denote by usj,k := Ghs Fj,k
usj,k ∈
+
Ns the particular solution of the discrete problem (4), which we will construct as the
solution (restricted to set Ns+ ) of the simple auxiliary problem (AP) of the following
form:
s
Fj,k ,
(xsj , ysk ) ∈ Ms+ ,
s s
(5)
Lh [u j,k ] =
0,
(xsj , ysk ) ∈ Ms− ,
usj,k = 0,
(xsj , ysk ) ∈ Ns0 \Ms0
(6)
Step 2: Difference Potentials and Construction of the BEP: We now introduce a
linear space Vγs of all the grid functions denoted by vγs defined on γs [18], [19, 17, 6],
etc. We will extend the value vγs by zero to other points of the grid Ns0 .
Definition 1. The Difference Potential with any given density vγs ∈ Vγs is the grid
function usj,k := PN + γs vγs , defined on Ns+ , and coincides on Ns+ with the solution usj,k
of the simple auxiliary problem (AP) of the following form:
0,
(xsj , ysk ) ∈ Ms+ ,
s s
Lh [u j,k ] =
(7)
s
Lh [vγs ], (xsj , ysk ) ∈ Ms− ,
usj,k = 0,
(xsj , ysk ) ∈ Ns0 \Ms0
(8)
On the Solution of the Elliptic Interface Problems by Difference Potentials Method
5
Here, PN + γs denotes the operator which constructs the Difference Potential usj,k =
PN + γs vγs from the given density vγs ∈ Vγs . The operator PN + γs is the linear operator
of the density vγs . Hence, it can be easily constructed [19, 17, 6]. We will now state
the most important theorem of the method:
Theorem 1. Density uγs is the trace of some solution usj,k ∈ Ns+ to the Difference
Equations (4) : uγs ≡ Trγs usj,k , if and only if, uγs satisfies Generalized Calderon’s
Boundary Equations with Projections (BEP)
uγs − Pγs uγs = Ghs Fγs ,
(9)
s ) is the trace (or restriction) of the particular soluwhere Ghs Fγs := Trγs (Ghs Fj,k
h
s
+
tion Gs Fj,k ∈ Ns constructed in (5)-(6) on the grid boundary γs , and Pγs uγs :=
Trγs (PN + γs uγs ) is the trace of the Difference Potential PN + γs uγs ∈ Ns+ in (7)-(8) on
the grid boundary γs .
Remark: The BEP (9) are constructed for each subdomain and solved efficiently
together with the boundary and interface conditions for the unknown densities uγs
using the idea of the extension operator for uγs , and the spectral approach for the
s
approximation of the Cauchy data (us , ∂∂un )|∂ Ds ([19, 17, 12], etc.).
Step 3: Construction of the Approximate Solution to the Model Problem (1)-(3)
from the density uγs obtained in Step 2:
Statement 1 (Generalized Green’s Formula)
s is the approximation to the solution
The discrete solution usj,k := PN + γs uγs + Ghs Fj,k
usj,k ≈ us (xsj , ysk ), (xsj , ysk ) ∈ Ns+ ∩ Ds of the continuous problem (1)-(3) (see [15, 14,
18] for a general theory of DPM and [19, 17, 6, 1, 5]).
The expected accuracy of the proposed method for domains with the smooth
boundaries and under sufficient regularity of the exact solutions will be O(hr−ε )
in the discrete Hölder norm of order 2 + ε (if the continuous second-order linear
elliptic operator L is approximated with rth order of accuracy by the discrete operator Lh , and the extension operator for uγs is constructed with sufficient accuracy),
see [15, 14, 18], [19, 17, 6, 1, 5] and Section 2.2. Here, ε is an arbitrary number
with 0 < ε < 1.
2.2 Numerical Examples
In the numerical examples below, we consider a second-order centered finite-difference
approximation (with 5-node stencil) as the
underlying discretization for DPM. The numerical experiments for the fourth-order approximation will be presented in future publication [5]. The first test problem that we
Fig. 2 Exact solution to the test problem (13) - (14) .
6
Yekaterina Epshteyn and Michael Medvinsky
present here is the problem from the paper
[3]:
∆ uDs = fs (x, y),
(x, y) ∈ Ds ,
s ∈ {1, 2}
(10)
where the interface between two subdomains D1 and D2 (see Fig. 1) is given by an
ellipse with semi-axes (a, b) = (0.9, 0.1), and the curvature is κ = −90 at (±a, 0)
which leads to a quite challenging tests [3]. The exact solution here is
u1 = sin x cos y,
u2 = 0,
(11)
which is discontinuous at the interface. The results for the test problem (10)-(11)
are presented in Table 1, which shows the relative error in the maximum norm
of the solution and its derivatives. To match the settings of the numerical experiments in paper [3], we consider auxiliary domains (here and below) D01 = D02 ≡ D =
[−1.1, 1.1] × [−1.1, 1.1] for the subdomains D1 and D2 respectively, Fig. 1. Note,
that in these settings, h1 = h2 = h (however, DPM handles as easily different auxiliary problems/non-matching meshes [19, 17, 7, 6, 1]). As observed from the Table 1
here, and from the Table 1 (bottom), on page 111 in paper [3], the accuracy in the
solution for the test problem (10)-(11) obtained by DPM is very close to the accuracy obtained by Mayo’s Method and by IIM. But, the accuracy in the derivatives
of the solution obtained by DPM is superior to the accuracy obtained by Mayo’s
Method or IIM.
Table 1 Test problem (10) - (11) with a = 0.9, b = 0.1 from paper [3]. Here N corresponds to
half of the number of subintervals (the same number of subintervals in x and y-direction), similarly
to the results in Table 1 (bottom), page 111 in [3]. Relative L∞ error in the solution and in its
derivatives.
N
L∞ -error in u
Rate
L∞ -error in ux
Rate
L∞ -error in uy
Rate
40
80
160
320
640
1.7474e − 06
5.2910e − 07
1.2986e − 07
3.1742e − 08
7.8701e − 09
1.72
2.03
2.03
2.01
1.0559e − 06
1.7733e − 07
2.5886e − 08
1.7307e − 09
2.0067e − 10
2.57
2.78
3.90
3.11
1.0041e − 06
1.6081e − 07
2.1461e − 08
1.3500e − 09
1.3030e − 10
2.64
2.91
3.99
3.37
The second test problem is again from [3] and has the same settings as the first
test problem (10)-(11), but now the exact solution is defined as:
u1 = x9 y8 ,
u2 = 0.
(12)
The results for this test problem are presented in Table 2. DPM errors for this
test problem (10), (12) are again close to the errors for Mayo’s method and IIM,
reported in Table 3, page 113 in [3]. As the last and more challenging test problem,
we consider the interface problem with variable coefficients as described below:
On the Solution of the Elliptic Interface Problems by Difference Potentials Method
7
Table 2 Test problem (10), (12) with a = 0.9, b = 0.1 from paper [3]. Here N corresponds to half
of the number of subintervals (the same number of subintervals in x and y-direction) , similarly to
the results in Table 3, page 113 in [3]. Relative L∞ error in the solution and its derivatives.
N
L∞ -error in u
Rate
L∞ -error in ux
Rate
L∞ -error in uy
Rate
40
80
160
320
640
1.0000e + 00
2.6622e − 01
3.8645e − 02
9.0971e − 03
2.3838e − 03
1.91
2.78
2.09
1.93
8.3442e − 01
2.2263e − 01
2.2076e − 02
2.7015e − 03
3.3376e − 04
1.91
3.33
3.03
3.02
1.0000e + 00
3.3108e − 01
5.0801e − 02
7.7708e − 03
1.0421e − 03
1.59
2.70
2.71
2.90
∂ uDs ∂ ∂ uDs ∂ as (x, y)
+
bs (x, y)
= fs (x, y),
∂x
∂x
∂y
∂y
(x, y) ∈ Ds ,
s ∈ {1, 2}
(13)
where a1 = (3 + 0.5 sin(2x + y)) b1 = (2 + 0.5 cos(4x + 3y)) and a2 = b2 = 106 .
The interface curve for this problem is again given by the ellipse with semi-axes
(a, b) = (0.9, 0.1). The exact solution for this test problem (13) is set to
u1 = sin(y2 x) sin(x3 y),
u2 = sin(2x) sin(3y).
(14)
The interface problem (13)-(14) is much more challenging than the previous test
problems since it has discontinuous solution at the interface, as well as a large jump
ratio between diffusion coefficients in subdomains D1 and D2 , Fig. 2. The results
for this test problem are presented in Table 3, which shows the relative error of
the solution and its derivatives in the maximum norm. As in the previous numerical examples, DPM preserves overall second-order (and even slightly better in the
derivative) accuracy in the solution and its derivatives. The observed numerically in
Tables 1-3 slightly higher order of accuracy in the derivatives could be due to the
specifics of the considered test problems and the properties of the extension operator
for uγs .
Table 3 Test problem (13) - (14) with a = 0.9, b = 0.1. Here N corresponds to half of the number of
subintervals (the same number of subintervals in x and y-direction), similarly to previous examples.
Relative L∞ error in the solution and its derivatives.
N
L∞ -error in u
Rate
L∞ -error in ux
Rate
L∞ -error in uy
Rate
40
80
160
320
640
4.5671e − 04
1.1520e − 04
2.8329e − 05
7.0319e − 06
1.7578e − 06
1.99
2.02
2.01
2.00
1.3639e − 04
2.2087e − 05
2.3138e − 06
3.1931e − 07
4.9421e − 08
2.63
3.25
2.86
2.69
1.3981e − 03
3.1356e − 04
3.5176e − 05
4.6670e − 06
7.2111e − 07
2.16
3.16
2.91
2.69
Acknowledgements We are grateful to Jason Albright and Kyle R. Steffen for the comments that
helped to improve the manuscript. The research of Yekaterina Epshteyn and Michael Medvinsky
is supported in part by the National Science Foundation Grant # DMS-1112984.
8
Yekaterina Epshteyn and Michael Medvinsky
References
1. J. Albright, Y. Epshteyn, and K.R. Steffen. High-order accurate difference potentials
methods for parabolic problems. Applied Numerical Mathematics, 93:87–106, July 2015.
http://dx.doi.org/10.1016/j.apnum.2014.08.002.
2. J. Albright, Y. Epshteyn, and Q. Xia. High-order difference potentials methods for 2D
parabolic interface problems. April 2015. work in progress.
3. J. Thomas Beale and Anita T. Layton. On the accuracy of finite difference methods for elliptic
problems with interfaces. Commun. Appl. Math. Comput. Sci., 1:91–119 (electronic), 2006.
4. Y. Epshteyn. Upwind-difference potentials method for Patlak-Keller-Segel chemotaxis model.
Journal of Scientific Computing, 53(3):689 – 713, 2012.
5. Y. Epshteyn and M. Medvinsky. On the analysis of DPM for the elliptic interface problems.
2015. in preparation.
6. Y. Epshteyn and S. Phippen.
High-order difference potentials methods for 1D
elliptic type models.
Applied Numerical Mathematics, 93:69–86, July 2015.
http://dx.doi.org/10.1016/j.apnum.2014.02.005.
7. Yekaterina Epshteyn. Algorithms composition approach based on difference potentials
method for parabolic problems. Commun. Math. Sci., 12(4):723–755, 2014.
8. E. Kansa, U. Shumlak, and S. Tsynkov. Discrete Calderon’s projections on parallelepipeds and
their application to computing exterior magnetic fields for FRC plasmas. J. Comput. Phys.,
234:172–198, 2013. http://dx.doi.org/10.1016/j.jcp.2012.09.033.
9. Randall J. LeVeque and Zhi Lin Li. The immersed interface method for elliptic equations
with discontinuous coefficients and singular sources. SIAM J. Numer. Anal., 31(4):1019–1044,
1994.
10. Anita Mayo. The fast solution of Poisson’s and the biharmonic equations on irregular regions.
SIAM J. Numer. Anal., 21(2):285–299, 1984.
11. M. Medvinsky. High order numerical simulation of waves using regular grids and nonconforming interfaces. Ph.D. Dissertation Tel Aviv University, 2013.
12. M. Medvinsky, S. Tsynkov, and E. Turkel. The method of difference potentials for the
Helmholtz equation using compact high order schemes. J. Sci. Comput., 53(1):150–193, 2012.
13. M. Medvinsky, S. Tsynkov, and E. Turkel. High order numerical simulation of the transmission and scattering of waves using the method of difference potentials. J. Comput. Phys.,
243:305–322, 2013.
14. A. A. Reznik. Approximation of surface potentials of elliptic operators by difference potentials. Dokl. Akad. Nauk SSSR, 263(6):1318–1321, 1982.
15. A. A. Reznik. Approximation of surface potentials of elliptic operators by difference potentials
and solution of boundary value problems. Ph.D, Moscow, MPTI, 1983.
16. V. S. Ryaben0 kiı̆. Difference potentials analogous to Cauchy integrals. Uspekhi Mat. Nauk,
67(3(405)):147–172, 2012.
17. V. S. Ryaben0 kiı̆, V. I. Turchaninov, and E. Yu. Èpshteı̆n. An algorithm composition scheme
for problems in composite domains based on the method of difference potentials. Zh. Vychisl.
Mat. Mat. Fiz., (10):1853–1870.
18. Viktor S. Ryaben0 kii. Method of difference potentials and its applications, volume 30 of
Springer Series in Computational Mathematics. Springer-Verlag, Berlin, 2002.
19. V.S. Ryaben’kii, V. I. Turchaninov, and Ye. Yu. Epshteyn. The numerical example of algorithms composition for solution of the boundary-value problems on compound domain based
on difference potential method. Moscow, Keldysh Institute for Applied Mathematics, Russia
Academy of Sciences, (3), 2003. http://library.keldysh.ru/preprint.asp?lg=&id=2003-3.
20. V.S. Ryaben’kii and S. Utyuzhnikov. An algorithm of the method of difference potentials for
domains with cuts. Applied Numerical Mathematics, 93:254–261, 2015.
21. S. V. Utyuzhnikov. Nonlinear problem of active sound control. J. Comput. Appl. Math.,
234(1):215–223, 2010.