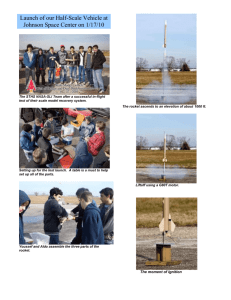
Preliminary Design Report for University Student Launch Initiative
advertisement

Preliminary Design Report for University Student Launch Initiative Conner Denton, John Faulk, Nghia Huynh, Kent Lino, Phillip Ruschmyer, and Andrew Tindell University of South Alabama Department of Mechanical Engineering 150 Jaguar Drive, Mobile, Al, 36688 Dr. Carlos Montalvo Department of Mechanical Engineering, Assistant Professor Faculty Advisor 1 of 62 American Institute of Aeronautics and Astronautics Contents I Summary of PDR Report I.A Team Summary . . . . . . . . . . . . . . I.A.1 Team Name . . . . . . . . . . . . I.A.2 Mailing Address . . . . . . . . . I.A.3 Team Mentor . . . . . . . . . . . I.B Launch Vehicle Summary . . . . . . . . I.B.1 Size and Mass . . . . . . . . . . . I.B.2 Motor Choice . . . . . . . . . . . I.B.3 Recovery System . . . . . . . . . I.B.4 Milestone Review Flysheet . . . I.C Payload Summary . . . . . . . . . . . . I.C.1 Payload Title . . . . . . . . . . . I.C.2 Summary of Payload Experiment . . . . . . . . . . . . 4 4 4 4 4 4 4 4 4 4 4 4 4 II Changes Made Since Proposal II.A Changes to Vehicle Criteria . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . II.B Changes to Payload Criteria . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . II.C Changes to Project Plan . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5 5 5 5 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . III Vehicle Criterion III.A Mission Statement . . . . . . . . . . . . . . . . . . . . . . . . III.B Success Criteria . . . . . . . . . . . . . . . . . . . . . . . . . . III.C Design at a System Level . . . . . . . . . . . . . . . . . . . . III.C.1 Nose Cone Determination . . . . . . . . . . . . . . . . III.C.2 Parachute, Altimeter, and Payload (P.A.P.) Bay . . . III.C.3 Booster Bay . . . . . . . . . . . . . . . . . . . . . . . . III.C.4 Fin Selection . . . . . . . . . . . . . . . . . . . . . . . III.C.5 Altimeter and Altimeter Bay . . . . . . . . . . . . . . III.C.6 Booster Bay Subsystems . . . . . . . . . . . . . . . . . III.D Vehicle Subsystem Evaluation and Verification Plan & Status III.D.1 Verification Plan of Launch Vehicle . . . . . . . . . . . III.D.2 Verification Plan of Recovery System . . . . . . . . . . III.E Risks & Mitigation . . . . . . . . . . . . . . . . . . . . . . . . III.E.1 Vehicle Risks & Mitigation . . . . . . . . . . . . . . . III.E.2 Recovery System Risks & Mitigation . . . . . . . . . . III.E.3 Payload Risks & Mitigation . . . . . . . . . . . . . . . III.E.4 Booster Bay Risks & Mitigation . . . . . . . . . . . . III.F Planning of Operations . . . . . . . . . . . . . . . . . . . . . . III.F.1 Manufacturing Plans . . . . . . . . . . . . . . . . . . . III.F.2 Plans in Functionality Testing . . . . . . . . . . . . . III.F.3 Integration Plans . . . . . . . . . . . . . . . . . . . . . III.GMaturity of Design . . . . . . . . . . . . . . . . . . . . . . . . III.G.1 Vehicle Assembly . . . . . . . . . . . . . . . . . . . . . III.G.2 Altimeter Bay . . . . . . . . . . . . . . . . . . . . . . III.G.3 Booster Bay . . . . . . . . . . . . . . . . . . . . . . . . III.G.4 Mass Statement . . . . . . . . . . . . . . . . . . . . . III.H Recovery Subsystem . . . . . . . . . . . . . . . . . . . . . . . III.H.1 Parachute . . . . . . . . . . . . . . . . . . . . . . . . . III.H.2 Downselection of Parachute . . . . . . . . . . . . . . . III.H.3 Parachute Testing Plans . . . . . . . . . . . . . . . . . III.H.4 Attachment Scheme . . . . . . . . . . . . . . . . . . . III.H.5 Deployment Process . . . . . . . . . . . . . . . . . . . III.H.6 Downselection of Dual Deployment . . . . . . . . . . . III.H.7 Plans of electronics and ejection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2 of 62 American Institute of Aeronautics and Astronautics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5 5 5 5 6 8 8 9 11 14 14 14 16 17 18 19 20 21 21 22 22 22 22 22 22 23 23 25 25 25 25 26 26 27 28 III.I Interfaces and Integration . . . . . . III.J Safety . . . . . . . . . . . . . . . . . III.J.1 Launch Procedure Checklists III.J.2 Final Assembly Checklist . . III.J.3 Safety Officer . . . . . . . . . III.K Preliminary Hazard Analysis . . . . III.K.1 Personnel Hazards . . . . . . III.K.2 Failure Modes . . . . . . . . . III.K.3 Environmental Hazards . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28 29 30 31 31 32 32 36 39 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41 41 41 45 47 47 48 49 49 49 51 51 V Project Plan V.A Budget Plan . . . . . . . . . . . . . . . . . . . V.A.1 Rocket Structure Budget . . . . . . . V.A.2 Outreach Budget . . . . . . . . . . . . V.A.3 Budget for Trips to Samson, Alabama V.A.4 Huntsville Budget Plan . . . . . . . . V.A.5 Total Project Cost . . . . . . . . . . . V.B Funding Plan . . . . . . . . . . . . . . . . . . V.C Project Timeline . . . . . . . . . . . . . . . . V.C.1 Event and Submission Schedule . . . . V.C.2 Gantt Chart . . . . . . . . . . . . . . V.D Educational Outreach . . . . . . . . . . . . . V.D.1 Purpose . . . . . . . . . . . . . . . . . V.D.2 Status of Outreach . . . . . . . . . . . V.E Schedule for Outreach Events . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52 52 52 54 55 56 56 57 57 57 59 59 59 60 60 IV Payload Criterion IV.A Payload Bay . . . . . . . . . . . . IV.A.1 Payload Selection . . . . . IV.B Mission Performance Predictions IV.C Drag . . . . . . . . . . . . . . . . IV.C.1 Legend for Drag . . . . . IV.C.2 Body Tubes . . . . . . . . IV.C.3 Interference Drag . . . . . IV.C.4 Launch Lug Drag . . . . . IV.C.5 Stability . . . . . . . . . . IV.C.6 Kinetic Energy . . . . . . IV.C.7 Wind Drift . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . VI Conclusion 61 3 of 62 American Institute of Aeronautics and Astronautics I. I.A. I.A.1. Summary of PDR Report Team Summary Team Name The team’s name is University of South Alabama Launch Society and the vehicle is Montalvo’s Minion. I.A.2. Mailing Address The mailing address for the team will be 150 Jaguar Dr., Mobile, AL 36688-6168. The team can be contacted through the Dean’s Office at (251)460-6168 or faxed at (251)460-6549. I.A.3. Team Mentor The University of South Alabama Launch Society’s team mentor is Mr. John Hansel. He is a retired electrical engineer from the Department of Defense. To this date, he holds level 3 certification in both NAR and Tripoli rocketry associations and has been experimenting with model rocketry for over 15 years. I.B. I.B.1. Launch Vehicle Summary Size and Mass The vehicle is projected to be 94 inches and weighing in at approximately 15.448 pounds. A more intricate description on the vehicle can be found in the Vehicle Criteria section. I.B.2. Motor Choice The motor selected for the vehicle is a Loki K690-SF. The motor was selected because it is affordable, comes in a reloadable kit, and will launch our vehicle to the desired altitude. I.B.3. Recovery System The recovery system will consist of a dual deployment style of ejection where there will be two parachutes deployed: a main and a drogue. The drogue parachute will be ejected first via black powder charge once the rocket hits apogee. As the rocket is descending, the main parachute will be ejected via black powder charge at a fixed altitude. The use of altimeters are vital in order to execute this method of deployment. The parachute selection was based upon the drag characteristics in order to obtain a safe, smooth descent for the recovery of the vehicle. I.B.4. I.C. I.C.1. Milestone Review Flysheet Payload Summary Payload Title There will be two payloads integrated upon the vehicle: the hazard detection system and the proof of electricity generation with a wind turbine. I.C.2. Summary of Payload Experiment For the hazard detection payload, a Pixy CMUcam5 sensor will be programmed by an Arduino Uno circuit board. The Pixy cam will be programmed to detect change in color variations specifically to the user’s desires. It will also be able to capture images, by command of the user, to record data and images. The wind turbine payload will be able to generate an electrical current that will be sufficient to power drogue parachute deployment. Small holes will be drilled into the section preceding the wind turbine in order for air circulation to come in. Since it is not within the competition regulations to power the deployment on the vehicle this way, a chart will be produced to prove that this method would work. 4 of 62 American Institute of Aeronautics and Astronautics II. II.A. Changes Made Since Proposal Changes to Vehicle Criteria One critical change made on the vehicle since the proposal is the incorporation of 4 fins. This will improve the stability of the flight while increasing drag by a minuscule amount. Also, the fin design was changed to straight tapered rather than trapezoidal due to research showing that straight tapered fins produced better drag characteristics. The P.A.P. bay’s length was increased from 36 inches to 41 inches in order to provide enough cellulose insulation to retard extreme temperatures the payloads could experience. The turbine chamber initially proposed is removed; rather, the wind turbine that was originally located in the chamber has been moved to the P.A.P. bay in unison with the hazard detection payload. Altimeter trays are included in the current design to protect the altimeters from unnecessary damage. II.B. Changes to Payload Criteria A major change to the hazard detection payload is the change in both circuit board and camera detection system. The cohesive usage of a Raspberry Pi and a PiCam was initially proposed to execute the hazard detection. However, the Pixi CMUcam5 will be used instead of the PiCam and an Arduino Uno circuit board will be used. The Pixi cam was chosen because it can be manually programmed to detect changes in color and other parameters and would also be able to record images and data as requested. The Arduino is used in place of the Raspberry Pi because they are available for immediate use and the team has much more experience with it. The wind turbine payload will not generate any electric current to be a power source for the electronics on board the vehicle. Since the competition does not allow for this method to produce electricity, charts and data will be given to prove that this is a feasible method to do so for future projects. II.C. Changes to Project Plan Since making the NASA Proposal, the team has decided to expand upon the planning path by creating a more detailed timeline and a more detailed budget. The changes in budget will include a more controlled spending approach and the designated treasurer to oversee all purchases made. Changes will be made to the project cost of each component by showing the percentage of total costs for each section made as well. This will be beneficial in analyzing the budget and making adjustments to further control of spending. III. III.A. Vehicle Criterion Mission Statement The stability of the launch vehicle is based upon the intricate design in selecting the size, mass, motor choice, and recovery system. The team will analyze each subsystem and determine the most appropriate design to provide the best overall performance of the vehicle in all aspects. Design, review, and simulation of each of these subsystems will be an important part in the success of a stable vehicle design. As a result, the team will work to produce a versatile, unique vehicle design that will be a viable competitor against others in the USLI competition. III.B. Success Criteria As far as the what is required in succeeding in the vehicle aspect of the design, this will consist of creating a presentable design that will be highly communicable between the team and others. The team will determine ideas and work towards designs in SOLIDWORKS that will help illustrate the design of each subsystem such as the overall vehicle, nosecone, parachute bay, payload bay, booster section, and fin design of the rocket. III.C. Design at a System Level In order for the design of the system to work, the team had to compromise a detailed and mutual plan for the communication between the critical sections of the vehicle. The critical section of the vehicle will consist of the nose cone, bay containing the parachute, altimeters, and payloads (P.A.P.), and the motor bay. The goal is for these systems to respond to one another mutually through controls and electronics. The electronics 5 of 62 American Institute of Aeronautics and Astronautics used in the vehicle will consist of an Arduino Uno, Pixi cam, sensors, and altimeters. The recovery system will consist of a parachute that will be specifically packed accordingly to its dimensions. III.C.1. Nose Cone Determination A rocket’s nose cone is a vital factor for its flight throughout the atmosphere and its foremost component. The determination of the nose cone in any rocket comes with considerations of both geometry and mathematics. However, the main aspect to consider for a nose cone is the drag characteristics it will employ in flight. The general form of a nose cone is shown below in Figure 1. Figure 1. Schematic of general nose cone and dimensions to consider. The variables are defined as follows: L is the length, R is the radius of the base, x and y are the positions length and radius at any point, respectively, and C L is the centerline. Different shapes of the nose cone must be cohesive with mathematical reasons. For example, slightly changing either the length or radius can therefore alter the drag characteristics and also the shape to a different type. The variety of shapes include: conical, blunt, bi-conic, ogive, elliptical, power series, and Haack series. Although the Haack series provides the minimal drag, it is fully based on mathematical derivations and has no specific shape. Power series nosecone provides a great balance in Mach number and low drag coefficients; however, there is always a discontinuity at the nosecone-body joint that makes it distinctly non-aerodynamic.15 Elliptical nosecones are popular for their blunt nose and tangent base, but are not normally found in professional rocketry. Bi-conic nosecones are rarely used due to its non-appealing features both geometrically and mathematically. Therefore, the final four nosecones up for consideration are conical, blunt, parabolic and ogive. The considered nosecone shapes are shown in Figure 2. Blunt nose cones will demonstrate poor drag characteristics due to its leading cross section so it will no longer be considered. Probably the worst nose cone that could be possibly used on a rocket is a flat nose, which results in a drag coefficient of approximately Cd = 0.80.8 The parabolic shape falls under the power series style of nose cones so it will display discontinuity issues. In order to further investigate the final selection for a nosecone, Figure 3 will compare the performance of each type of nosecone. Along with the drag comparison, the Mach number performance for different types of nosecones are shown in Figure 4. 6 of 62 American Institute of Aeronautics and Astronautics Figure 2. The final four nosecones to consider. Figure 3. Drag comparison for each nosecone selections. From the figures above, the ogive and conical shapes both display similar performance in both drag coefficients and Mach number. However, the ogive nosecone was selected because it is very popular in modern rocketry because of its great drag characteristics. Also, it is inexpensive and easily manufactured.16 The parameters of the nosecones are as follows: length of 17 inches, diameter of 4 inches, and wall thickness of 0.0625 inches. The material will be similar to polyvinyl chloride. 7 of 62 American Institute of Aeronautics and Astronautics Figure 4. Mach number performance for varying nosecone types. III.C.2. Parachute, Altimeter, and Payload (P.A.P.) Bay An essential part of the rocket is the payload, altimeter, parachutes (P.A.P) bay. All necessary equipment for data logging, drogue deployment, payloads, and parachutes are harnessed in this particular bay. The P.A.P. bay design was selected through an extensive process involving research and proactive brainstorming between the team members in charge of the recovery system and payload system. The team decided to organize the recovery system and payload system within the P.A.P. bay, which originally started from a 36 in (0.914 m) length tube. The team decided to start with a 36 in (0.914 m) tube because it is the original length of the tubing the team had ordered for the exterior of the vehicle. The recovery system team had calculated that the altimeter bay and payload bay would need to occupy 16 in (0.406 m) . Through further inspection we found that the nose cone would need an entrance length into the P.A.P. bay of about 4 in (.102 m) and the coupler would need at least an entrance of 3 in (.076 m) into the concurrent bay. After both of these entrances were included into the left over length, we were left with about 13 in (.330 m) for both shock cords, the drogue parachute, and the main parachute. Through further research and development of the recovery system and payload system, the length of the bay needed to increase by 5 in (.127 m). After factoring in both the altimeter and payload bay along with the nose cone and coupler entrances, this extra length gave us an additional 18 in (.457 m) for the shock cords, drogue parachute, and main parachute, rather than 13 in (.330 m). This increase led to an overall length of 41 in (1.041 m) for the P.A.P. bay. A schematic of the final P.A.P. bay can be seen in Figure 5. Figure 5. Schematic of P.A.P. created in OpenRocket. III.C.3. Booster Bay The purpose of the booster bay is to hold the rocket motor while having continuity with its size. Depending on the motor size, the booster bay will be designed accordingly in order to sustain the motor itself and the stabilizers of the rocket. The stabilizers are often referred to as the shock cord that connects each bay of 8 of 62 American Institute of Aeronautics and Astronautics the rocket to one another and the insulation, usually cellulose insulation. Also, the exterior of this bay will consist of the fins to stabilize the atmospheric launch. The motor mount will be designed in anticipation of loading a motor of 2.13 inches in diameter at approximately 20 inches in length. The four centering rings will match the motor mount’s outer diameter since its sole purpose is to stabilize the motor mount in place. Figure 6. OpenRocket sketch of the booster bay with labeled sections and parameters. Note that the center of gravity and pressures are inaccurate in Figure 11 because it is only considering the booster bay rather than the entire rocket itself. The diameter of the booster bay is kept consistent throughout the entire rocket at 4 inches. The total length of the entire bay is 36 inches. The dimensions of the fins will be discussed in the following section. III.C.4. Fin Selection There are two major factors when making fin selection. The first of these factors is determining the number of fins. More often than not, there are either three or four fins on model rockets. Four fins is generally more stable than three, however this causes extra weight and drag. The second major decision is the shape of the fins. After running multiple test flights of smaller rockets, the team noticed that the rocket maintains better control with four fins. However, reducing the number of fins will reduce the total drag, Fdrag , due to the fins. This assumption is proven by equation (1),6 where ρ = air density at the corresponding altitude, As = surface area, V = velocity of the rocket, and CD = drag coefficient of the fins. Despite the reduction in drag from using three fins, the team has decided that better stability of the rocket outweighs the benefit of slightly less drag due to the fourth fin. Therefore, the team has chosen to use four fins. 1 2 ρV As CD (1) 2 The second major fin selection factor is the shape of the fin. After researching different shapes and airfoils, the team has chosen to use a streamlined straight-tapered fin. First of all, the team analyzed three designs for the lead and trailing edge of each fin. These airfoil designs are square, rounded, and streamlined. These designs can be seen in Figure 7 where the top airfoil is square, the middle airfoil is rounded, and the bottom airfoil is streamlined. Using the same figure, it can be seen that as velocity increases, the drag rises exponentially with no regard to airfoil design. However, this exponential growth due to velocity is less rapid for the streamlined airfoil compared to its counterparts. Fdrag = 9 of 62 American Institute of Aeronautics and Astronautics Figure 7. Relation of velocity to drag due to the airfoil shape of the fin. As previously mentioned, the team has decided to use the straight-tapered planform. Four planforms were considered for the fin design. These planforms are shown in Figure 8. The team chose not to use the rectangular planform since it has the highest surface area, which increases drag. Generally, the swepttapered planform is used when rockets will be traveling at supersonic speeds, due to its ability to break the shock-wave barrier produced at this velocity. Since the competition rocket will be traveling subsonically, the swept-tapered is not necessary. Elliptical fins are a far less common planform. Due to the complexity of constructing this planform, the team chose to remove it. Now it is evident that the straight-tapered planform is the best option because it is easy to construct, it is generally used it subsonic to trans-sonic flight, and it has a reduced surface area compared with the rectangular design. 10 of 62 American Institute of Aeronautics and Astronautics Figure 8. Common model rocketry planforms. An important aspect of the straight-tapered fin design is the taper ratio, λ. This relation is shown in equation (2). Currently, the South Alabama Launch Society is using a taper ratio of 0.52, where the tip cord, CT , is 3.25” and the root cord, CR , is 6.25”. λ= III.C.5. CT CR (2) Altimeter and Altimeter Bay For the design, there will be a total of three altimeters used: two for deployment purposes and one for scoring. One will be used for deployment at apogee, initializing the drogue stage. The other deployment altimeter will be for the main parachute ejection that is pre-programmed. The two deployment altimeters will be activated by black powder charges that are wired to the same ejection charge. This allows repetitive iterations and ensures a safer ejection. The black powder will be provided on site by our mentor and/or supplier. However, the charges will not be repeated since they can produce a large amount of pressure if they are to activate at the same time, causing destruction in the rocket walls. Each altimeter will be powered by a 9V lithium battery source. From the altimeters, a wire will run through the bulkhead through a small hole that will be sealed to prevent any external gases from entering the P.A.P. bay. Doing so will prevent any potential change in pressures, causing inaccurate deployment and measurements. Once the wire is on the exterior of the bay, the wire will lead to a terminal that will consist of an electric match for each altimeter that will lead into a measured amount of black powder. Having the terminals on the exterior body of the bay will allow ease of change in matches after expiration. Table I will show a list of potential altimeters that are considered for the design. 11 of 62 American Institute of Aeronautics and Astronautics Table I. List of potential altimeters. The five altimeters above were considered because of the availability from past experiments. Therefore, as stated in Table I, the altimeters are provided by the University of South Alabama. The PerfectFlite StratoLogger SL100 is the only scoring altimeter that can be used during the competition so it was clearly chosen for the scoring altimeter. The deployment altimeters used are one Altus Metrum TeleMega and one PerfectFlite StratoLogger SL100. The TeleMega was selected because it would gave GPS data for x,y, and z for research purposes and will be placed furthermost within the vehicle. The additional StratoLogger will be used for an ejection charge of the drogue. Some reasons these two were chosen are availability, ready to use software, and reliability. The TeleMega will and can be reused for multiple flights since it will store flight data. A depiction and plans of the payload tray and altimeter tray is displayed below. 12 of 62 American Institute of Aeronautics and Astronautics Figure 9. Schematic of altimeter tray with dimensions. Figure 10. Altimeter tray as designed in SOLIDWORKS. 13 of 62 American Institute of Aeronautics and Astronautics III.C.6. Booster Bay Subsystems One critical subsystem that will be found in the rocket is the nylon shock cord. The shock cord’s purpose is to connect the vehicle sections and the material selected was for the purpose of being highly fire resistant. A fiberglass coupler tube was installed to unify the booster bay to the P.A.P. bay. The motor is another subsystem that was selected in order to achieve the goal altitude of 5,280 feet. In order to prevent any potential heat dissipation from the motor, 7 inches of cellulous insulation will be stored between the nylon shock cord and the motor. The depth of the insulation is roughly determined because its sole purpose is to mitigate any flammable hazards. Another subsystem for the booster bay is the straight tapered fins, which was discussed in-depth in the preceding section. Figure 11. Schematic of booster bay with dimensions in inches as designed in SOLIDWORKS. III.D. Vehicle Subsystem Evaluation and Verification Plan & Status The team is involved with plans to evaluate and verify the vehicle’s stability and performance through analyzing the vehicle criteria that is set by NASA and making changes to each vehicle subsystem to fit the requirements. Once the subsystems have passed the vehicle verification, the team will go into further detail by testing each subsystem to success. A table has been created to outline each vehicle requirement and its assessment to the design. III.D.1. Verification Plan of Launch Vehicle 14 of 62 American Institute of Aeronautics and Astronautics Vehicle Requirement Requirement Features 1 The vehicle should deliver two payloads to an altitude of 5,280 feet from the ground. In order to achieve this altitude, the aerodynamics of the rocket will be maximized by selection of the ogive nose cone and the straight-tapered fins. Launching with the correct motor size will also greatly contribute to the altitude goal. In order to ensure that the rocket is capable of flying to 5,280 feet, the team will use OpenRocket to simulate the launch. 2 The official altitude will be determined using one, on-board barometric altimeter. The rocket may contain multiple altimeters, but one must be predetermined to be the scoring altimeter. USA’s rocket will contain two barometric altimeters as well as one GPS/altimeter. One altimeter will control the drogue deployment, the second altimeter will control the main parachute deployment, and the GPS/altimeter will serve as the official scoring altimeter. 3 The vehicle must be reusable and recoverable after each launch with minimal or no damage. The exterior of the launch vehicle will be coated in a selected material to increase the strength of the body. 4 The launch vehicle shall have a maximum of four independent sections. USA will have a two piece rocket. One section will carry the drogue deployment and the turbine system while the second section will contain the main parachute and the hazard detection camera. 5 The launch vehicle shall be limited to a single stage. USA’s launch vehicle will perform its only motor ignition at takeoff. 6 The vehicle must be quickly prepared for flight within two hours. Prior to the launch date, the team will practice preparing the rocket to ensure timely delivery. 7 The launch vehicle shall be capable of remaining in launch-ready configuration at the pad for a minimum of 1 hour without losing the functionality of any critical on-board component. When the team is practicing the timed vehicle assembly, they will also test to ensure the rocket maintains functionality on the launch pad for a minimum of one hour. 8 The launch vehicle shall be capable of being launched by a standard 12 volt direct current firing system. The launch vehicle will be capable of accommodating the 12 volt firing system by utilizing e-match insertion into the motor. 9 The launch vehicle shall use a commercially available solid motor propulsion system using ammonium perchlorate composite propellant. All USA motors will be purchased from legitimate model rocketry vendors. These motors will be NAR, TRA, and CAR certified. 10 The total impulse provided by a launch vehicle shall not exceed 5,120 Newton-seconds (L-class). Currently, USA plans to use a K-class motor which falls short of the 5,120 Newton-seconds total impulse. 15 of 62 American Institute of Aeronautics and Astronautics 11 Pressure vessels on the vehicle shall be approved by the RSO. They should have a minimum factor of safety of 4:1 as well as a pressure relief valve that sees the full pressure of the tank. Since there will be no pressure vessel on-board the launch vehicle, no extra measures will be taken. 12 All teams shall successfully launch and recover a subscale model of their full-scale rocket prior to the CDR. The team plans to launch a subscale of the final rocket by mid-December. 13 All teams shall successfully launch and recover their fullscale rocket prior to the FRR in its final flight configuration. The full scale launch will be performed in early to mid-February to ensure timely delivery of results by the FRR. Table II: Verification Plan of Launch Vehicle III.D.2. Verification Plan of Recovery System Recovery System Requirement Requirement Features 1 The launch vehicle shall stage the deployment of its recovery devices, where a drogue parachute is deployed at apogee and a main parachute is deployed at a much lower altitude. The launch vehicle will use an altimeter at apogee to deploy the drogue parachute while a separate altimeter will be used to deploy the main parachute. 2 Teams must perform a successful ground ejection test for both the drogue and main parachutes prior to the initial subscale and full-scale launches. These parachute testings will be done at the team’s regular launch field prior to both of the aforementioned flights in order to prove recovery system effectiveness. 3 At landing, each independent section of the launch vehicle shall have a maximum kinetic energy of 75 ft-lbf. In order to ensure that the independent sections do not exceed the maximum kinetic energy, the team will model the descent of the rocket in OpenRocket where the velocity of the rocket at impact with the ground will be calculated. Then, the kinetic energy of each section will be calculated using the equation E = 12 mV 2 . 4 The recovery system electrical circuits shall be completely independent of any payload electrical circuits. Each parachute deployment will be controlled by its own altimeter. Each payload will be controlled by electrical systems that are unrelated to the recovery system altimeters. 5 The recovery system shall contain redundant, commercially available altimeters. The launch vehicle will contain two PerfectFlite StratoLoggers and one TeleMega, all of which are commercially available. 16 of 62 American Institute of Aeronautics and Astronautics 6 Motor ejection is not a permissible form of primary or secondary deployment. An electronic form of ejection must be used for deployment purposes. Each StratoLogger will initiate a black powder ejection charge for their respective parachute deployments at apogee and low-altitude main deployment. 7 A dedicated arming switch shall arm each altimeter, which is accessible from the exterior of the rocket airframe when the rocket is in the launch configuration on the launch pad. USA will use either simple wire twisting switches or small flip switches to initiate the altimeters from the exterior of the rocket. 8 Each altimeter shall have a dedicated power supply. Each altimeter or GPS will have its own 9 volt battery. 9 Each arming switch shall be capable of being locked in the ”ON” position for launch. If twisting wires is chosen, they will be tightly secured in a specific hooked formation. If the flip switches are used, they will automatically be locked into position once they are activated. 10 Removable shear pins shall be used for both the main parachute compartment and the drogue parachute compartment. Nylon shear pins will be used to attach the components. The exact properties of these shear pins will be determined by the CDR to ensure proper shear calculations. 11 An electronic tracking device shall be installed in the launch vehicle and shall transmit the position of the tethered vehicle or any independent section to a ground receiver. The exact tracking device is yet to be determined at this time. USA’s launch vehicle will remain entirely tethered together, therefore, there is no need for multiple transmission devices. 12 The recovery system electronics shall not be adversely affected by any other on-board electronic devices during flight. The two recovery altimeters will remain in an independent bay from the electronic tracking device in order to avoid inadvertent excitation of the recovery system. Table III: Verification Plan of Recovery System III.E. Risks & Mitigation Tables will be used to describe the potential risks of each component of the vehicle and its mitigation techniques for visual purposes. The sections that will be broken down are as follows: vehicle risks, recovery system risks, payload risks, and booster bay risks. The NASA Student Launch 2016 Handbook will be heavily relied on for structuring the following tables.1 17 of 62 American Institute of Aeronautics and Astronautics III.E.1. Vehicle Risks & Mitigation Table IV. Potential risks relating to the vehicle as a whole with internal components considered. 1. Risk 1: The vehicle is damaged when ejection charges are ignited. • Impact: The damage to the vehicle may lead to modifications after landing or failure to reuse the vehicle if damage is too extreme. • Mitigation : Testing of recovery system, specifically with the ejection charges. Weighing the amount of black powder precisely to ensure the vehicle P.A.P. bay and nose cone do not incur any damage upon ignition. 2. Risk 2: The vehicle incurs an extensive amount of damage are upon landing impact. • Impact: The vehicle will not be reusable and the team will receive low scoring in the NASAS competition. • Mitigation: Proper testing of the recovery system should ensure the vehicle’s landing speed is low enough to reduce the possibility of any damage. 3. Risk 3: A team member is injured during testing of component systems. • Impact: Depending on the magnitude of the injury, workload may increase on the remaining team members. • Mitigation: Pre-test briefing of all protocol must be performed so all team members are aware of all possible risks involved and what to do to ensure safe testing. 4. Risk 4: Team members leave the state for school holidays. • Impact: The team will be prohibited to meet to fulfill project milestones. • Mitigation: The team has created an Overleaf file which will allow all team members to have access to write and compile any scholarly documents related to the project. 5. Risk 5: The team may not receive enough funding to purchase all vehicle components. • Impact: Without sufficient funding, the key components of the vehicle’s design, manufacturing, and testing and possibly subsystems can be delayed when trying to reach benchmarks. • Mitigation: The team will reach out to all available sources. 18 of 62 American Institute of Aeronautics and Astronautics III.E.2. Recovery System Risks & Mitigation Table V. Potential risks relating to the recovery system of the vehicle. 1. Risk 1: Original planned tests are not successful. • Impact: Verification of the system is delayed, pushing potential manufacturing dates behind. • Mitigation : Researching and gaining an understanding of how the subsystems work together to create the system, to devise a correct test method. 2. Risk 2: System components (altimeters and parachute components) are damaged and/or not functioning as specified. • Impact: Delays testing and verification of the system and in turn delaying the manufacturing of the overall vehicle. • Mitigation: Pre-test briefly specifically covering the handling of the sensitive components. Also, ordering excess components as a safety net since there tends to be error. 3. Risk 3: Parachute materials are not readily available and need to be ordered. • Impact: May delay testing plans and/or manufacturing process. • Mitigation: The team will buy excess amounts of material needed to manufacture the parachutes in order to hinder the risk from happening. 4. Risk 4: The down selected altimeters are on back order. • Impact: May delay testing of the electronics, which will create a setback in the team’s specific benchmarks. • Mitigation: The team may order multiple of the components or if too close to very important milestones, the team may select another altimeter that was considered. 5. Risk 5: The altimeters are damaged upon delivery due to poor handling and/or poor packaging. • Impact: Testing of the recovery system will be delayed in turn pushing important benchmarks further behind. • Mitigation: An alternate altimeter that was originally considered will be used. 19 of 62 American Institute of Aeronautics and Astronautics Table VI. Potential risks relating to the payloads for the competition. III.E.3. Payload Risks & Mitigation 1. Risk 1: Team member injured during testing. • Impact: Depending on injury, workload may increase on remaining team members. • Mitigation : Pre-test briefing of all protocol must be performed so all team members are aware of all possible risks involved and what to do to ensure safe testing. 2. Risk 2: Original planned tests are not successful. • Impact: Verification of the system is delayed, pushing potential manufacturing dates behind. • Mitigation: Adequate preparation for planned tests should be done. Research proven testing methods to reduce the options available. 3. Risk 3: Sensors failing due to too much power. • Impact: Could melt or damage circuit boards. Delay further testing and increase costs. • Mitigation: Using test data to verify the amount of input power produces the correct amount of output. 4. Risk 4: Ordered parts are damaged or broken. • Impact: Delayed tests for the payload. • Mitigation: Using reputable sources along with having a supplier to contact in the event that a component is needed for replacement. 5. Risk 5: Components are damaged or lost during travel to launches. • Impact: Prevents data accumulation and accurate testing. May require additional travel expenses to achieve test results. • Mitigation: Properly package and seal sensitive components. Plan for both loss and acquire extra parts when applicable. 20 of 62 American Institute of Aeronautics and Astronautics III.E.4. Booster Bay Risks & Mitigation Table VII. Potential risks relating to the booster bay and its internal components. 1. Risk 1: The motor bay is damaged when ejection charges are ignited. • Impact: The damage to the vehicle may be amplified upon landing, deeming the vehicle to be disposable and un-recoverable. Ultimately, the team will fail in the competition. • Mitigation : Testing of recovery system, specifically with the ejection charges. Weighing the amount of black powder precisely to ensure the booster bay does not incur any damage upon ignition. 2. Risk 2: The vehicle does not reach the required altitude for the competition. • Impact: The team will receive lower scores if the vehicle does not reach or exceeds the expected altitude originally proposed. • Mitigation: Communication amongst the team members of any changes made regarding additional mass and/or dimension changes. 3. Risk 3: Motor is compromised due to moisture. • Impact: Motor fails to ignite, resulting in a failed launch. Tests can not be performed and data cannot be collected. • Mitigation: Properly store and transport motors. Avoid exposing the motor to wet environments such as rain. 4. Risk 4: Motor fails and/or explodes. • Impact: Launch is considered a failure. Part of all of the team’s rocket may be compromised. Sensitive and costly electronics are disposed. • Mitigation: Choosing to pack a motor with a kit rather than buy a prepacked motor. Have a reliable vendor that will sell the highest quality motors in order to reduce the chance of motor failure. III.F. Planning of Operations The team’s operational strategy is depicted the sections below in order of importance. The first section, the manufacturing plans, is an objective to build the vehicle to where each subsystem can be tested individually and can be uninstalled if needed. The second and third objectives (plans of functionality and integration) are even in level of importance in that it is necessary to test each component simultaneously rather than individually. The following sections will explain each objective more explicitly. 21 of 62 American Institute of Aeronautics and Astronautics III.F.1. Manufacturing Plans During the PDR process, the team worked together to design each component of the vehicle on SOLIDWORKS to display the integrity of the design. These drafts of each component were vital in ensuring the tolerances of each component to fit in the vehicle itself. From then, the team began the construction of each part starting with a master checklist of all the vehicle components. The university 3-D printer will be used in creating the inner components of the payload bays such as the altimeter and payload electronics trays. Although the fabrication process of the components will span over several days, the team will gather the inner pieces such as the parachute bay, altimeter bay, payload bay, and booster frame. Once the components are completed by the 3-D printer, they will be fitted together to test for clearance issues. When these issues, if any, are resolved, the other components (the nose cone, P.A.P frame, booster frame and fins) will be coated with the down selected material. III.F.2. Plans in Functionality Testing Each subsystem must be fully operational to hold true to the success of the vehicle. First, the team will test each subsystem individually and make adjustments, then test the subsystems simultaneously to ensure full operation of the vehicle. With this method, each team member can and will understand the concepts of each subsystem and how each subsystem will respond to one another. In addition to this, the testing will take place in a safe, open area to evaluate each subsystem at once. The parachute testing, however, will take place by setting up a deployment contraption with the parachute packed into a dummy vehicle. The altimeter bay and black powder charge will be installed in the vehicle. To test the deployment procedure, the vehicle will be driven up to a certain speed to deploy the parachute. The payload components will be tested in the university electrical engineering labs as the necessary testing equipment are located there. III.F.3. Integration Plans The design officer of the team will work with the rest of the team to integrate each different section of the project. It is the responsibility of the integration officer to efficiently communicate all the processes involved with the design, manufacturing and implementation of each subsystem. The status of the integration is that the plan is in development and is shown in more detail in the integration section. III.G. III.G.1. Maturity of Design Vehicle Assembly To maximize stability and reach the goal altitude of the competition, the team must design the exterior of the vehicle to be aerodynamically sound while creating high resistance to outside atmospheric conditions. Through the team down selecting on many designs demonstrated in earlier sections of the nose cone shape, overall vehicle body, and the shape of the fins, the aerodynamics of the vehicle can be maximized. The ogive shaped nose cone proved to have the most minimal drag coefficient, which is essential being that it is the forefront component of the rocket. The four fins work to bring the most stable flight while only minimally increasing drag and using the straight tapered designed fins will also minimize drag. The inner material of the vehicle will be a selected material by the team to increase strength and durability of the rocket. The final finish of the vehicle will be chemically coated to produce the least air friction. III.G.2. Altimeter Bay The altimeter bay will be equipped with three altimeters that will have a dedicated power source. Two bulk heads will be used at the forefront of the altimeter bay where the payload bay will be attached in between for rigidity and alignment of the interior components. In material selection, the team will use ABS plastic, which is lightweight and high in strength. The essential idea of the altimeter bay is to have easy access to each altimeter and its power source. The altimeters can be easily uninstalled by removing each from the tray and the battery power source can be removed by detaching the security belt and pulling the battery from the compartment. 22 of 62 American Institute of Aeronautics and Astronautics III.G.3. Booster Bay The design of the booster bay is essential for the reason that this department keeps the main propellant and stability mechanisms in place. Four centering rings were selected to hold the tube and motor itself stable all while keeping the booster bay rigid overall. In order to mitigate the potential heat dissipation of the motor up through the rocket, blow-in cellulose insulation was applied due to its flame resistant properties. The fin design and dimensions were down selected through an OpenRocket simulation which generated the most stable flight path. III.G.4. Mass Statement Table VIII shows the current estimated mass of the rocket. These predictions are made by actually weighing many of the individual components on a digital scale and estimating a few of the more obscure components such as the turbine payload. Two components with uncertain dimensions at the moment, were weighed based on some of USA’s components from the past. These include the payload trays and the gyroscope. Also, the fins, centering rings, and bulkhead masses were calculated by determining the proper volume and using the respective densities for each material, since m=Vρ (3) According to Table VIII, the mass of the rocket on the launch pad with full propellant is 15.448 lb. However, after the flight, once all the propellant has been burned and the black powder charges have been ignited, the rocket mass will become 12.362 lb. It should be noted that this final mass differs from the ”Total Mass (Empty Motor)” mass shown in Table VIII because the final mass mentioned above subtracts the black powder charges while the ”Total Mass (Empty Motor)” still has the black powder charge included. The mass estimate in this report is only a preliminary quote. The final design will possibly have a different mass for a number of reasons. A primary source of error is the mass of the turbine system. Since this payload is in the early stages of development, it is very difficult to get an accurate estimate of its mass. With this knowledge, the team is budgeting up to a 20% mass increase. After calculations in OpenRocket, the team has calculated that adding 4.56 lb to the rocket mass of 15.45 lb, will make the rocket fly to an altitude of 5,000 feet. For every one foot that the rocket flies under the goal altitude of 5,280 feet, one point is deducted. For every foot over 5,280 feet, two points are deducted. Since the competition devotes one hundred points to the the altitude of the flight, realistically, the rocket cannot fly over 5,330 feet or under 5,180 feet. However, the team has decided that the rocket has a margin of mass error of 4.56 lb. This will make the rocket fly to an altitude of 5,000 feet. The team shot low on this mass error to try to reduce the amount of mass added in the future. Component Mass (lbm) Nosecone 0.660 Body Tube (2) 1.920 Motor Mount 0.302 Fins (4) 0.952 Motor (empty) 2.205 Motor (loaded) 5.291 Motor Case 0.507 Motor Retainer 0.090 Body Tube Coupler 0.150 23 of 62 American Institute of Aeronautics and Astronautics Turbine Bay Tube 0.250 Electronics Bay 0.200 Camera Bay 0.200 Turbine Prediction 0.580 Centering Rings (4) 0.168 Bulkheads (7) 0.770 Main Parachute 0.370 Drogue Parachute 0.068 Shock Cord 0.260 Black Powder 0.010 Cellulose Insulation 0.150 Wadding Cloth 0.650 Rods (4) 0.450 Gyroscope 0.22 Payload Tray (3) 0.300 Arduino Uno 0.060 StratoLogger (2) 0.060 TeleMega 0.060 Battery Pack (2) 0.100 9V Battery (2) 0.200 AT-2B Transmitter 0.060 PixyCam 0.100 Electronics Mounting Hardware (4) 0.050 Eye Bolt With Nut (5) 0.200 Rail Button and Screw (2) 0.020 Nylon Shear Pins (4) 0.020 Total Mass (Empty Motor) 12.362 24 of 62 American Institute of Aeronautics and Astronautics Total Mass (Loaded Motor) 15.448 Table VIII: Mass table of rocket components III.H. Recovery Subsystem The main objective of the recovery system is to design a recovery scheme that will allow for quick reuseability, reliability, and durability over time. In other words, the recovery system must be made to withstand any applied forces, minimize wind drift, and also be able to locate the rocket after landing. The overall recovery system will entail a dual deploy setup that will control the velocity at descent, the orientation of the rocket, and will limit the velocity on impact of landing. This two process system will also prevent wind drift as the drogue parachute will eject first to slow down the descending rocket while the main parachute will deploy at a predetermined altitude of descent that is closer to the ground. III.H.1. Parachute The main goal of the parachute is to slow the projectile to the ideal velocity to create maximum drag. The aim of this section will be to perform calculations and create plans to test the resultant design. The term to represent this drag will be given by CDR , otherwise the coefficient of drag of the parachute. III.H.2. Downselection of Parachute In reference to the Parachute Recovery Systems Design Manual (PRSDM), the team analyzed different parachute designs to signify each prospective and conflicting characteristic. The PRSDM contains parameters for different style parachutes such as average angle of oscillation and coefficient of drag. The ultimate aim is find which parachute can give the highest CDR when deployed. It was found that annular and conical have the highest drag coefficient relative to canopy surface area. With that, the team conducted a downselection process and concluded with three kinds of parachutes that would yield a prospective CDR : annular, quarter spherical, and conical. Examples of each gore shape are shown below. Figure 12. Examples of the three potential parachute types. In order to further meet the goal of choosing a parachute with the highest CDR , the team has devised experimental analysis of which parachute will yield the most acceptable CDR . After the drag test, the team can compare and conclude which chute will be most ideal. III.H.3. Parachute Testing Plans In further testing and determination, the team will conduct a drag test to choose the final parachute used in the full scale assembly. This will include testing each parachute under a known velocity. From the PRSDM, equation (4) can be utilized in finding the drag coefficient of the parachutes. The terms must first be defined 25 of 62 American Institute of Aeronautics and Astronautics as: D is the drag force in lbf , q is the dynamic pressure in lbf /f t2 , A is area in f t2 , and CDR is the drag coefficient that is dimensionless. D = qACDR (4) With this given equation, testing can begin with different trials of velocity to find the parachute’s drag force to calculate for the drag coefficients. Testing will include an anemometer (wind gauge), a force gauge which will read the tension produced from the parachute as wind is applied, and a velocity gauge to tell the speed of the fluid applied. The fluid in this case will be air with a density of 0.0023769 slug/f t3 . Testing will include the three different parachutes with the ideal surface areas of each and will find the resulting average drag coefficient of each parachute type. III.H.4. Attachment Scheme The three major sections of the projectile attached to one another will be the nose cone, P.A.P. bay, and booster bay. In order to ensure a successful deployment process, the attachment of these sections must be able to resist any type of failure. With this idea in mind, the sections will be securely linked through shock cord that is able to withstand tension forces larger than 500 lbs. The eye-bolts that will be used will be able to withstand a shear force of over 400 lbs. The eye bolts themselves will be secured by metal nuts and washers and epoxied to prevent failure of the bulkheads. III.H.5. Deployment Process The project will consist of a dual deployment. The purpose of dual deployment is to get a high altitude rocket down to the ground quickly; therefore, the team will not have to walk very far to retrieve the vehicle.2 For visual purposes, the schematic of a general dual deployment rocket is shown in Figure 13. Figure 13. Schematic of rocket flight consisting of dual deployment. The first stage will be triggered by a black powder charge that will eject the booster bay from the attached P.A.P. bay and nosecone. There will be a drogue parachute deployed in the first stage of the rocket. The main parachute will be held in a loose bundle by a strap until stage two of the deployment. These 26 of 62 American Institute of Aeronautics and Astronautics will trail behind the rocket; therefore, slowing its descent from apogee. Whenever the rocket reaches the predetermined altitude programmed into the altimeter in the P.A.P. bay, the second deployment phase will be triggered. The second phase will partition the nosecone from the P.A.P. bay and result in a smooth, slow final descent. The decision of making this deployment selection will be elaborated in the downselection of dual deployment section. III.H.6. Downselection of Dual Deployment To further investigate on the different types of deployment, the Parachute Recovery Systems Design Manual (PRSDM) will be used to do so.10 The parameters that will aid in the determination of the deployment process are, in no particular order, reliability, complexity, drogue effectiveness, and space usage. The reliability parameter will be evaluated via the Single Point of Failure Analysis found in the PRSDM. In this method, the reliability of a system is gauged by the number of components that can cause catastrophic failure of the system by failing to operate themselves. This will be a feasible method to compare the reliability of two or more systems. The drag characteristics will be the main aspect of the drogue effectiveness determination. The space usage will be an approximate estimate of, obviously, the space used within the system. The complexity is simply the magnitude of difficulty required to design the deployment. Some feasible deployment designs are drogue-less bundle, bundle with drogue, reefed main, chute cluster, and dual deployment. In Figures 14 and 15, alternative deployment processes are shown. Figure 14. Examples of the drogue-less bundle and bundle with drogue deployments. 27 of 62 American Institute of Aeronautics and Astronautics Figure 15. Examples of the reefed main and chute cluster deployments. Both the drogue-less and bundle with drogue deployments were further investigated. Both are essentially the same with the exception that the bundle with drogue deployment will have another drogue parachute attached. This will increase the drag coefficient and is a feasible method. The reefed main deployment is significantly more complex in that specialized mathematical models are taken into account. The reefed main deployment is practical; however, due to its unnecessary complexity, it was eliminated from consideration. Chute cluster deployment has approximately the same level of complexity as the reefed design due to the mathematical models. In theory, the parachute groups can provide extreme stability in terms of drag characteristics and resistance to oscillation; however, in reality, it is very difficult to get all three parachutes to inflate simultaneously and can lead to a space issue. Due to the unreliable nature of cluster deployment, this alternative can be excluded from consideration. Dual deployment was chosen by the team because of the simplicity of the design and the team can easily revise from past experiments. However, even though the dual deployment method lacks in space efficiency, its reliability and simplicity outweighs the other factors from the other designs. The bundled deployment with drogue will be issued as a setback design in case there are complications when the team is dealing with the dual deployment. III.H.7. Plans of electronics and ejection Future testing of devices will include the black powder ejection system of the drogue and main deployment and the operation of the payloads. The deployment process will be tested through validating the function of the black powder ejection system and the power sources. Other testing plans will ensure that the altimeters are fully operational, in that they will send correct signals for the drogue deployment, main deployment, and payload. III.I. Interfaces and Integration Two payloads will be integrated with our rocket that we will use in the competition. The first payload will be a hazard detection camera called a Pixy Cam. An Arduino Uno will be used to power the camera, as well as log data, after deployment. Both of these components will be attached to a payload tray, firmly nestled within a payload bay by two metal rods attached to the tray. For extra support needed to safely house the payload due to the stresses on the rocket body, a firm fiberglass coupler will be used as the payload bay. Each end of the payload bay will be secured by bulkheads made of balsa wood. Balsa wood will be used for its strength and its light weight. The two metal rods will extend through each bulkhead and be secured by hardware. A metal eye-bolt will be attached to the end nearest the nose cone, and will be used 28 of 62 American Institute of Aeronautics and Astronautics to attach the shock cord. The end of the payload bay will be flushed with the rocket coupler. A deployment charge will be shot downwards toward the payload bay which will in turn force the coupler out. The coupler will be permanently attached to the booster bay. When the payload bay is deployed, the shock cord will be long enough to place the camera well below the booster bay on descent. Another payload consisting of a dc turbine will be utilized to harness power on ascent. This payload will be housed permanently within a separate bay located in the booster bay above the motor. The same materials and setup used for the payload bay will be used for this turbine bay. Cellulose insulation will be used in between the turbine bay and motor to protect the turbine components. This bay will be as airtight as possible so no wind flowing through the bay is lost to the inside of the rocket. Multiple holes drilled directly into the sides of the turbine bay and the adjacent rocket body. Located within the P.A.P. bay, along with the payload bay, is an altimeter bay. This altimeter bay will house three altimeters along with three 9 volt batteries and circuitry. A drogue parachute, shock cord, black powder charge, and cellulose insulation will separate the payload bay and altimeter bay. These altimeters will be secured to an altimeter tray in the same manner the payload is attached to its constituent bay. This includes the two rods and and hardware used to secure the bulkheads to the upper and lower openings. At the end of the altimeter bay closest to the payload bay, an eye-bolt will be securely placed in the lower bulkhead to attach to the shock cord. Directly below the altimeter bay will be a black powder charge for drogue deployment. Immediately below the black powder charge, cellulose insulation will be used to protect the drogue parachute from the ignition and absorb some of the force from the deployment charge. The drogue parachute and shock cord will be located below the cellulose insulation. A wireless transmitter will be used to track the rocket during ascent and descent. An AT-2B ELT wireless transmitter will be placed in the nose cone of the rocket to shield it from damage. To firmly secure the transmitter in place and provide easy removal, velcro will be used for attachment to the nose cone. Figure 16. Sample AT-2B ELT wireless transmitter. Several interfaces are required between the rocket and the ground launch system. The rocket will be attached to the launch rail using two rail buttons. One of these buttons will be located 3 in (0.076 m) above the center of gravity and the other will be placed below the center of pressure to ensure a stable launch. Each rail button will be screwed into the body of the rocket and epoxied in place. An e-match will be used to ignite the motor of the rocket by using a power source provided. III.J. Safety The University of South Alabama holds safety at the highest priority in every aspect of this project. With this notion, a checklist will be produced in order to maintain successful and safe operations. Both the Tripoli code of safety for high power rocketry and the NAR safety code will be implemented by the team when producing the checklist. The checklist is a rough draft for the time being and will be updated as improvements are made. Each item of the checklist will be inspected by one member as another is providing 29 of 62 American Institute of Aeronautics and Astronautics instructions following the guidelines. The safety officer will then perform a final inspection and provide his signature once each checklist is completed. III.J.1. Launch Procedure Checklists Below are tables that contain the preliminary checklists for each component of the vehicle. Each team member will be given the opportunity to input any updates to the checklists and verify safety precautions. As aforementioned, the safety officer will be responsible for the final inspections on each component and his signature will be provided as well. Table IX. Checklist for the vehicle’s structural components to ensure excellence before the launch. Table X. Checklist for payloads’ components to ensure security and functionality. Table XI. Checklist for the assembly of the motor and its components to ensure a safe and successful launch. 30 of 62 American Institute of Aeronautics and Astronautics Table XII. Checklist for the recovery system required to have a safe landing and recovery of the vehicle. Table XIII. Checklist for the altimeters to make sure they are all functional especially the scoring altimeter. III.J.2. Final Assembly Checklist Once all of the preceding checklists are confirmed by the safety officer, the final launch procedures can be performed. Table XIV. Checklist before the final launch to make sure all preceding procedures are performed. III.J.3. Safety Officer For this year’s competition, the safety officer for the University of South Alabama’s Launch Society will be Nghia Huynh. Mr. Huynh will be responsible for the safety of those around him and his job is to ensure that both the team and the mission are preserved at all times. He currently holds a Tripoli Level 1 certification and plans on achieving the Tripoli Level 2 certification on November 7, 2015. In order to achieve Tripoli Level 2 certification, the flight must fly a motor in the range of 640.01 and 5120.00 Newton-seconds in total impulse. Motors within the impulse range are typically J, K, and L motors. There shall be also a written examination prior to the certification flight in order to evaluate the officer’s rocketry knowledge on the scientific side. Also, the launch must recover safely in order to be certified.3 With that aside, Mr. Huynh will have to follow a number of required precautions so that no member or spectator is injured or 31 of 62 American Institute of Aeronautics and Astronautics harmed due to any failures during the planning, testing, construction, or flights of the rocket. Mr. Huynh will consistently keep the team informed of any hazards and safety concerns, issues, and documentations throughout the project. He will create his own personal checklist which will guide the rest of the team to perform the correct pre-flight and post-flight procedures. Risk matrices will provide the team a way to analyze many of the hazards and failure possibilities as well as addressing any environmental issues that may be encountered. Since the safety officer is certified through Tripoli, he will be required to keep all the rocket motors, explosives, and igniters at all times in a secure, red-painted, plywood-reinforced steel box. The steel box will be kept off campus due to it being illegal to keep on campus. The only time the box should be unlocked is when a motor is being removed to be used. Other than to either use or store motors, the box is to be remained closed and secured as all times to avoid any potential explosive hazards. The University of South Alabama Launch society will abide all rules, regulations, and laws set forth by the University of South Alabama, City of Mobile, State of Alabama, Federal Government, and any other regions that will be encountered during travel. Along with the preceding laws, all traffic and airspace laws must be obeyed at all times as well. This includes, but not limited to, low-explosives laws and rocketry associations such as NAR and Tripoli. According to NFPA 1127 code for high power rocketry, a level 2 or 3 flier whose responsibility and duty during the operation of high power rockets is to confirm a rocket’s compliance with the applicable provisions of this code, be confident that the rocket will fly in a safe manner, designate the areas of the launch site, and oversee the safety of all spectators and participants.4 Along with Tripoli regulations, NAR regulations will be obeyed as well. One example for a NAR regulation is the only use lightweight, non-metal parts for the nose, body, and fins for the rocket.13 Ultimately, the Range Safety Officer will decide if the rocket is prepared for flight. His decisions and instructions will be respectfully followed. Along with these regulations and laws, all FAA waiver requirements will be met according to the time table scheduled. The highest priority for the University of South Alabama’s Launch Society is the safety of everyone in the surroundings. The key for this is to be aware of the processes taking place and alert at all times in the event of hazardous events. Proper personal protective equipment will be worn at all times during the construction phase of the project. When dealing with any type of chemicals, a fume hood will be used to prevent any harmful acidic accidents. Black powder, as aforementioned, will be provided by the team’s mentor and will be only used during test flights. Continuity tests will be performed on electric matches before any flight to make sure they are working properly in order to ignite the black powder. When dealing with sharp objects or tools, experienced members will be able to handle the tasks with extra caution. Although everyone is responsible for their own safety, the safety officer will ultimately be the one to decide if safety guidelines are being followed correctly. III.K. Preliminary Hazard Analysis When dealing with explosives and high power rocketry, risk is inevitably present. The risks encountered in the project will be approached in the safest way conceivable. In order to prevent hazards, risk matrices will be provided and used to display the level of danger for different scenarios. Creating a risk matrix will allow the team to update the information to the chart as different situations are being encountered; therefore, preventing the same mistakes to reoccur. III.K.1. Personnel Hazards It is essential to recall that in order for the project to be a success, both the team and rocket must be successful. The team members must stay safe and unharmed while the rocket must conquer the competition guidelines for success. For the purpose of the following risk matrices, both the team and rocket will be considered as the personnel for the project. The risk matrices that pertain to the personnel of this project are shown in Tables XV and XVI. 32 of 62 American Institute of Aeronautics and Astronautics Table XV. Risk matrix for the potential hazards that can occur during travel. • Deadlines (High) Deadlines for this project are designed to accommodate proper planning and time management. These deadlines must be promptly met and it ensures that no agreements are broken, ranking it high in importance. In order to accomplish these deadlines, time will be set aside for each task in order to provide a cushion for the team to fall back on if needed. This will improve productivity and compensate for any room of error. • Prolonged sun exposure (High) Whether it is during test flights or the launch competition, sun exposure is inevitable to all participants. In the past, the radiation caused great dermal irritations and potentially skin damage due to the long hours of exposure. It is extremely important that the team stay protected by wearing sunscreen and properly applying it constantly. • Traffic laws (Medium) Different or modified traffic laws are expected to be encountered during the traveling to test and fly the team’s rocket. Due to these rules and regulations, the team must drive respectfully and be aware at all times of the constant changes, especially in unfamiliar areas. If this hazard is handled correctly, the hazard would be considered a low risk. • Travel fatigue (Medium) During the stretch of the project, the team is expected to be able to travel anywhere necessary in order to test launch the rockets. This will imminently lead the team exposed to fatigue and maybe drowsiness if experienced for extended time periods. It should be noted as a concern for members of the team as the hazard of being fatigued could lead to accidental events. • Flat tires (Low/Medium) During road travel, flat tires have a possibility of occurring. It will be a minor hazard if the team is aware and properly prepared. Making sure that spare tires are available and inflated will prevent problems from becoming major. All tires should be inspected and confirmed to be in the best condition possible. • Time delays (Medium) Events may occurs or arise that may possibly cause time delays for the team. It has the chance of being a moderate hazard as it could create other problems later on. If the team follows orders, checklists, 33 of 62 American Institute of Aeronautics and Astronautics deadlines, and stays ahead of their assigned tasks, the chance of time delays causing an issue should be minimal. To assist in preventing time delays, likewise with deadlines, extra time will be allotted to events and travel to compensate for errors. • Broken or lost rocket components (High) As the team is traveling from various locations, packaging and handling issues may be present. In order to mitigate losing or breaking any items, extra provisions will be taken. Every component of the rocket must be labeled and packaged for protection. Sensitive components should be properly padded while components such as the body tubes are held stationary in a rack or case. The created checklist in the preceding safety section will be used in order to prevent this hazard. • Loss of transportation (High) Since the team is driving and transporting the rocket to Huntsville, Alabama, there is an improbable chance that the vehicle will break down. Therefore; this can be devastating and cause a large delay and negative impact towards the team budget. To mitigate this hazard, proper engine maintenance will be administered such as checking oil, fluids, gauges, etc. Other arrangements that can be possibly affect the budget will be considered during budget planning. This calls for the team to be alert of the transportation vehicle’s condition at all times. • Separation from the group (Medium) The loss of a team member is a rare coincidence that nevertheless is considered a hazard to the project. Prevention can be easily implemented through the use of cellular phones to keep in contact with one another via calling or text messaging. Also, team members must be accompanied by at least one other member to ensure safety. Table XVI. Risk matrix for the potential hazards that can occur during the construction phase. • Dust inhalation (Medium) Dust inhalation will be encountered when sanding body tubes of the team members certification rockets. Wearing dust masks or vacuum hoods to reduce the chances of breathing the material will make this a medium concern, yet it could cause minor respiratory issues if not followed. • Minor abrasions from sandpaper (High) It should noted that the team will use sandpaper and teammates should wear gloves when utilizing this tool. This can cause damage to members’ hands and result in delay in production. 34 of 62 American Institute of Aeronautics and Astronautics • Use of machinery and tools (Medium) The majority of the construction that concerns the use of machinery and tool will be performed by a member that has had experience. This is to enforce the mitigation of any damage to the items, components, or people. Otherwise, proper lessons will be administered to the inexperienced. • Sharp knives (High) The use of sharp knives and objects are to be expected. Team members will handle these tools maturely to prevent any unnecessary harm. Team members will use these items while wearing protective gear such as gloves, protective eye wear, and proper precautions. • Contact with paint (Low/Medium) When dealing with paint, members must be considerate of the surrounding and the environment they are painting in. Gloves, proper clothing, and protective eye wear will be worn to prevent any contact with members’ skins. • Possibility of contact with glue (Medium) Glues will be used to seal components of the rocket. Wearing gloves should prevent contact. However, if it does occur, immediate cleaning will be performed to prevent any subsequent consequences. • Chemical exposure (High) At any time a chemical is being used by a team member, MSDS’s will be nearby in all laboratories and online and will reviewed to follow proper precautions for safe use and how to apply protective equipment. This could severely harm an individual if not carefully executed. It is possible that team members will at some point handle a chemical and should do so carefully and with a partner to reduce risk. • Contact with fiberglass and carbon fiber resin (Low/Medium) A couple of the team members may test with fiberglass and carbon fiber. This may require the use if the resins to set the fibers. Wearing gloves, proper clothing and eye-wear will diminish the chance of contact. • Accidental discharge of black powder (Medium) Only certified members will be allowed to contact black powder, making it improbable that any member would encounter it. However, team members may be near when black powder is being utilized. This presents an chance of an accidental firing of black powder around people that could be catastrophic under the right conditions. Keeping team members at safe distances from all charges and staying aware will reduce the chance of harm and failure. 35 of 62 American Institute of Aeronautics and Astronautics III.K.2. Failure Modes The following tables below display the risk matrixes for the possibility of failures present in the project. The failure modes are expressed in color to display the magnitude of each possibility. The failure modes that will be covered are for the proposed design of the rocket, payload integration, and launch operations. Also, an explanation for the mitigation of the hazards will be provided as well. Table XVII. Risk matrix for any hypothetical failures that can be incurred upon the vehicle. • Minor damage to shock cord from ejection charge (Medium) Any damages to the shock cord can be easily prevented by selecting the proper shock cord material that will be highly resistant to high temperatures. As the ejection charge activates, corrosive gases will emit and can potentially damage the shock cord; therefore, the success of the project is diminished. • One altimeter fails (Low) This possibility of failure can be avoided by simply having extra altimeters ready to replace any that fails. However, a more efficient way to prevent this failure from happening is to properly secure the altimeters onto the vehicle wherever the altimeter may be. • Minor damage to parachute from ejection charge (Low/Medium) The parachute can experience possible damage upon deployment stages. Proper insulation will be applied to protect the parachutes on the vehicle in order to recover the vehicle safely. 36 of 62 American Institute of Aeronautics and Astronautics • Premature ignition of ejection charges (Medium) During the flight, abrupt changes in pressure could possibly cause altimeters to receive false readings and deploy at the incorrect moment. This would potentially cause sever damage to components. By creating a streamline rocket exterior, the pressure should remain consistent around the port holes. The selection of the quality of the altimeters will also aid in the mitigation of this failure. • Major damage to parachute from ejection charges (High) If improper packing is done on the parachutes or protective material, major damage could arise from the incident. Therefore, this can result in the parachute failing to deploy properly and the vehicle will not have a safe landing. To prevent this catastrophic failure, the parachute packing will be shadowed by our team mentor and safety officer to ensure a successful descent. • Scoring altimeter fails (Medium) By limiting the function of the scoring altimeter to just recording data, the team hopes to reduce the chance of it failing to improbable. It will have a dedicated power source and tested for accuracy. If it fails, replacements will be available and additional launches will perform. • No separation from ejection charge (High) If there is no separation from ejection charge, the launch will be considered ballistic and a failure. This could harm both spectators and team members because the behavior of the launch would be arbitrary. By testing for adequate amounts of black powder, the team expects to determine the proper amount needed to create the desired separation of rocket segments. If the launch fails to replicate test results, the mission disaster would be catastrophic. With enough testing, the failure mode should be improbable. • Shear pins do not fail properly (High) Proper testings will be utilized to establish security to the limited number of shear pins to restrict the rocket from falling apart. Also, it can fall apart separately if the team desires. Failure to break the shear pins will result in the rocket being eradicated. • Fins separate from rocket (Medium) The fins of the rocket are the primary part to create a turbulence on the rocket. The vehicle will experience violent behavior which could separate the fins from the rocket. Reinforcing the pins will add rigidity to the structure and allow a proper launch. One way of reinforcing the fins is applying the proper adhesive and allowing days for it to fully be applied. • Failure of both altimeters (Medium) In the event the deployment altimeters fail to set off the ejection charge, the rocket would become ballistic and catastrophic. No deployment would occur and the rocket could possibly be destroyed. Having the altimeters with their own dedicated power source and electric match is designed to reduce this failure. 37 of 62 American Institute of Aeronautics and Astronautics Table XVIII. Risk matrix for any hypothetical failures that can be incurred towards the payload. • Corrosive gases from ejection charges (Medium) As the ejection charges are activated, harmful gases are released as an aftermath effect and can consequently damage electronics, wires, batteries, and other sensitive components. Having secured and sealed bulkheads between each compartment is a precaution the team will undertake to tolerate failure. • Explosion from ejection charge (High) By performing tests with the black powder charges, the goal is to determine the correct amount to separate the rocket segments without destroying the rocket. Calculations have been done as a starting point to find an amount to begin with; however, further testings are necessary in order to verify. • Corrosive gases from motor (High) Damage from the motor is possible with every launch. Properly fixing the motor assembly should allow the motor to expel all gases from the aft end. Creating another bulkhead will also help to seal the compartment. • Power to equipment is lost (Low) If the power is lost to the equipment, the payload for the mission will not be able to detect any ground threats. However, this possibility will not affect anyone’s safety; rather, it will only affect the success of the launch team since it is a required payload. Issuing redundancy in the form of extra power supplies will create a comfort zone for this failure mode. • Explosion from motor (High) The team has concurred that a manually packed motor will be used since a reusable motor tube is available for use. Choosing this method will open the gates for sources of failure occur such as an incorrectly packed motor that maybe is missing a retention ring. Though improbable, this explosion would be catastrophic and potentially destroy the payload. Choosing a reliable supplier and having the team mentor examine the motor will eliminate this potential failure. 38 of 62 American Institute of Aeronautics and Astronautics Table XIX. Risk matrix for any hypothetical failures that can be incurred during the launch. • Activate altimeter (High) In the event that the rocket is bumped or knocked over once the altimeters are on, the ejection charges could ignite. This has the potential to be extremely dangerous to others in the area. Utilizing checklists and prioritizing steps in the launch process aims to reduce this case. The extended exposure to sunlight could also result in the activation of altimeters. By having a non-transparent case, the team aims to prevent sunlight from reaching the inside of the bay. • No liftoff (Low) In the rare occasion where a launch system is incorrectly connected, a no launch situation may occur and the rocket motor does not activate. This is a minor mode of failure that should not endanger personnel. It can be easily resolved by rechecking the electric matches and motor components. • Faulty motor (Medium) Having selected a reputable motor, the chance of the motor failing is diminished. However, in the rare instance that the motor explodes, the result would be detrimental and failure will be present. III.K.3. Environmental Hazards While technical hazards is the more common form of hazards, environmental hazards are present as well. As the project progresses, the environment and weather will become a developing issue. For example, appropriate weather is required in order for test launches to launch due to airspace regulations. These events could compromise part or all of the mission, depending on the magnitude of the situation and how it unfolds. Therefore, time management and efficient planning is required in order to avoid any environmental hazards. Keeping up to date with current events and news will also aid to reduce this hazard. Provided below is the risk matrix for any potential environmental hazards that can be present to the team. 39 of 62 American Institute of Aeronautics and Astronautics Table XX. Risk matrix for any hypothetical hazards and concerns that the environment may bring. • Prolonged sun exposure (High) The team will encounter periods of extended exposure to the sun while in the open fields of Huntsville. During the extended periods of sun exposure, ample amounts of sunscreen will be applied and proper clothing will be worn to mitigate this issue. If appropriate precautions are executed, this hazard will be of no concern. Not only will the radiation be and issue to team members, it will also be an issue for the rocket. Many altimeters contain barometric sensors which may be damaged due to prolonged sun exposure. By implementing an altimeter bay that is opaque, the team will be able to prevent the sun from damaging any altimeter and electronic components. • Heat (Medium) Due to the time of the year of the launch, heat will need to be addressed. Members should try to remain cool and avoid excessive heat exposure, which could lead to heat strokes. Taking breaks from the heat will help keep the team safe. Also, team members should watch others for signs of a heat stroke. The heat may also create concerns for equipment in the rocket. For this reason, sensitive parts should be kept in a cool environment until needed. • Dehydration (High) As the sun and heat impact the team, it is important to remain hydrated at all times. There will also be refreshments available at all times to relieve of this risk. • Cold (Low/Medium) The climate for Huntsville during the time of the competition will pose little to no threat for cold weather conditions. Although a minor risk, team members will be required to pack at least some clothing to resist the cold weather. As the rocket travels upward in the atmosphere, it will be reaching cooler environments. Precautions have been made to verify the compatibility of rocket components and what temperature it can operate under. • Rain (Medium) The chance of rain may come at any time during the period of this project. Team members are expected to have either rain jackets or umbrellas to remain dry. Along with the members, the equipment, especially electronics, must remain dry as to not cause any deformation of any rocket segments or damage to any sensitive electronics. The rain may also create delays which may need to be accommodated for as they are encountered. Weather forecasts will be closely observed during any events which the team may partake. • Moisture (High) Properly sealing all electronics and equipment will be essential for the success of the mission. Corrosion or deformation of parts due to moisture could cause devastating results to the launches if not prepared 40 of 62 American Institute of Aeronautics and Astronautics for. Parts will need to be coated in water resistance material to reduce the chances of failures. All explosives will also need to be properly maintained in dry storage at all times. Any electronics used will be contained in a dry environment until used. IV. Payload Criterion The design of the scientific payloads are one of the important aspects of the NASA design competition that needs to be assessed. It is necessary that the team designs two payload bays, one of which will be installed in the P.A.P bay and the other contained in the impregnated chamber of the rocket. The team has evaluated the necessary components needed for the subsystems is described in the later portion of this report. As far as what the goals are to designing such bays, it was determined to design to where each bay has ease of access for components, the structure is durable and stable, and is designed for most efficient use. The tray and the chamber was drafted in SOLIDWORKS in which the designs are shown below. IV.A. Payload Bay The payload bay will be composed of a cardboard bay and closed off at each end by balsa wood bulkheads. Two metal rods will extend through the bay and will be secured with locking nuts. Within the bay, a 3-D printed payload tray will be attached by braces to the metal rods. IV.A.1. Payload Selection A microcontroller to send signals and communicate with the payload camera is in order. The two microcontrollers in question for selection are the Arduino Uno and Raspberry Pi. Each of these electronics have their own pros and cons. A table of their characteristics needed for selection will be depicted below. Figure 17. General Arduino Uno circuit board. Table XXI. Micro-controller selection criteria. Micro- Output Digital PWM Analog Flash Length Width Weight Price controller Voltage I/O Pins Pins Input Pins Memory Raspberry Pi 5V, 3.3V 26 1 0 SD Card 3.2 in 2.1 in 0.1 lb $35 Arduino Uno 5V, 3.3V 14 6 6 32 kB 2.7 in 2.1 in 0.06 lb $25 41 of 62 American Institute of Aeronautics and Astronautics Figure 18. General Raspberry Pi circuit board. A review of the pros and cons of each board was formulated by the team to ultimately select the microcontroller that will be used with the payload. As seen in the above table, both microcontrollers are similar in size and weight, so the consideration for the microcontroller relied heavily on ease of use and functionality. Since the camera module used for hazard detection only uses at most one GPIO pins, there is no need for the plethora of pins provided on the Raspberry Pi. The code needed to communicate with the camera module is minuscule and will not require more than 10 KB of memory. The Arduino Uno is programmed through its own Arduino IDE created from a C based language. As for the Raspberry Pi, it is programmed with Python 2 or Python 3. Each language has its own advantages and disadvantages, but the Arduino IDE proves to be the most user-friendly and was able to be learned by the team in a couple of weeks. Based on the review of the two microcontrollers, the team decided on using the Arduino Uno for the hazard detection payload camera module. An Arduino Uno, powered by a 9 volt battery, will be housed within the payload bay and attached with hardware. The Arduino will be used to communicate and power a camera module that will be used for hazard detection. A vigorous selection process was used by the team to narrow the selection of the camera module. Several aspects such as weight, cost, effectiveness, and ease of use were considered in the selection. A table of the final three options, along with their characteristics, can be found below. Table XXII. Camera selection criteria. Camera Module Weight Dimensions Cost Application Pixy Camera (CMUcam5) 0.1 lb 2.2 x 1.5 x 2.2 in $69.00 Object Detection and Tracking Pi Cam 0.01 lb 1.0 x 0.8 x 0.4 in $29.95 Mid-Resolution Video Camera GoPro Hero3 0.16 lb 2.3 x 1.6 x 0.1 in $299.99 High Resolution Video Camera After vigorous research, the team decided to use the Pixy Cam for its functionality. Using an Arduino Uno and its respective IDE, the relative x and y coordinate positions of certain objects can be tracked and logged. Before launch, we will use the Pixy Cam software to capture a photo of at least three distinguishable colors. These colors will have to differ from the surround launch environment to ensure optimal detection. The software will verify these colors and set them as unique IDs. As data is logged to the Arduino Uno, the relative size and positions can be tracked through descent, as this payload will be deployed at apogee. Large tarps with the unique colors discussed will be placed in random positions around the launch site for 42 of 62 American Institute of Aeronautics and Astronautics detection. Upon completion of the flight of the rocket, the logged data will be uploaded to a computer for analysis. We will then integrate the coordinates of the objects from the Pixy Cam with the height of the rocket at that time from the StratoLogger altimeter. Using this information, exact position with minimal tolerance will be extracted. Figure 19. Pixy CMU5cam that will be used in cohesion with the selected microcontroller. As for the second payload, a dc motor will be used as a turbine to provide power to a hypothetical drogue deployment source. A propeller will be permanently attached to the dc motors shaft. Air will be directed into the upper portion of the turbine bay through a large hole extending through the rocket body to the interior of the turbine bay. A pipe elbow will provide a directed flow of air to the propeller of the turbine. In order to gain as much air as possible through the provided hole, a small scoop that is pointed upwards will be secured to the rocket body just below the outside hole. Air gathered into the turbine bay will escape through a smaller hole located at the bottom of the turbine bay. This hole will extend through the turbine bay to the outer portion of the rocket body. The dc motor will be firmly attached to the turbine bay with a cable clamp. Figure 20. Example wind turbine that will be used as a payload. As power is generated by the turbine, the voltage will be harnessed within a capacitor. A resistor in series with the capacitor will provide a simple RC circuit for storing power. The RC circuit will charge in accordance with equation (5). −t )) (5) RC where Vc is the voltage across the capacitor, Vs is the voltage from the source, t is the time, R is the Vc = Vs (1 − exp( 43 of 62 American Institute of Aeronautics and Astronautics resistance, and C is the capacitance. A switch, possibly a p-type MOSFET transistor, will be connected in series directly after the capacitor. This transistor or switch will only allow current to flow when the voltage from the turbine reaches zero. To avoid current leaking from the capacitor back into the motor, a current directing diode will be attached in series with the resistor. Another resistor of low resistance will be attached in series with the switch to provide a current large enough to power and e-match. The voltage from the capacitor will be discharged according to equation (5). As the voltage discharges, it will pass through the resistor providing a current. This current will need to be at least 1 amp for a duration of at least 5 ms. Further testing will be provided to find the exact values of the resistors, capacitor, and voltage input. A schematic of the proposed circuit can be seen below in Figure 21. Figure 21. Proposed circuit schematic for the e-match Table XXIII. Payload purpose and description Payload Payload Requirement Subsystems Analysis Pixy Camera (CMUcam5) X, Y, and Z coordinates for hazard detection Arduino Uno, brightly colored tarps, 9V battery, stratologger altimeter Identify the exact location by association with the height given by the altimeter DC Motor Turbine 1 amp of current for at least 5ms to theoretically power an altimeter Circuitry as seen in the above schematic, current measuring device, data logging device Provide enough charge from the turbine to theoretically power an e-match at apogee Each of these payloads provides a uniqueness to the rocket that will provide added safety and improved recovery. When a launch vehicle descends back to the ground, it may be holding valuable material or data. Recovery of the launch vehicle is of the utmost importance to obtain the data that is logged on the rocket for analysis or the obtained luggage and to assess the launch vehicles condition. The recovery system relies heavily on the hazard detection system of the launch vehicle. If the vehicle were to land out of reach, such as on a mountain, recovery becomes difficult or impossible. Electronics on board the vehicle may be damaged by certain environments such as extreme heat or water, and should be guided away from these hazards to recover the data on board. The Pixy Camera will provide valuable feedback of the relative x and y coordinates of these hypothetical hazards by way of color recognition. An exact position of these hazards can be found by correlating its x and y data with the height (z) data from the altimeter. After flight, the data will be extracted from the Arduino Uno using a SD card shield that logs the data during flight. The x and y positions at different points in time from the Pixy Camera will then be loaded into Excel along with the height at different points in time from the altimeter. A complex equation will be theorized along with an algorithm to dictate the change in ’x’ and ’y’ with respect to ’z’. By using this equation, we will be able to find the exact positions of the hazards relative to the camera. This payload will provide a small challenge by using the data and equation to find the position of the hazards. The accuracy of the position will depend on the relative positions on the camera. As the camera moves closer towards the tarp, the tarp will appear larger on the screen. The Pixy Camera shows the position of the center of the object;therefore, if the tarp is close enough to the camera, then the camera will show a position of (0,0) because the tarp will take up the whole screen of the camera. Testing and accuracy of the camera will be accomplished by creating a unique 44 of 62 American Institute of Aeronautics and Astronautics color object and measuring the distance from the object to the camera. We will then use the above equation to test whether the data received from the Pixy Camera and Arduino are accurate and correct. After the data is received, we will then be able to provide a tolerance. At apogee, a drogue parachute must be deployed to slow the launch vehicle to a speed that is suitable for a main parachute deployment. Safety of the rocket, surrounding objects, and surrounding people depend on this drogue deployment. Usually these drogue deployments are powered by an on-board altimeter and 9v battery. If the battery or altimeter were to malfunction, a serious safety hazard will have been formed from the descending vehicle. The vehicle will accelerate and the main deployment may zipper the vehicle. If the main deployment fails due to this zippering, the vehicle will plummet to the ground at astounding speeds. The second payload of a turbine could theoretically provide a backup system for the drogue deployment. Based on the circuitry seen above, the turbine will be activated by the outside wind on ascent. This voltage created by the turbine will charge a capacitor. A switch will prevent the capacitor from discharging. The switch will be able to detect if the turbine is creating a voltage. If a voltage is being created, the switch will remain open. If there is no voltage being provided by the turbine, the switch will close and the capacitor will then discharge. Our hypothesis is that the turbine will cease to spin at apogee when there is little to no airflow through the chamber. At this time the capacitor will discharge the voltage and create a current from the resistor. This current will have to be large enough to theoretically power an e-match. Testing will be performed prior to launch to provide feasibility for the payload. First we will test the current output of the StratoLogger altimeter. Next we can test the turbine voltage output in a wind tunnel set to the speed of launch ascent given in OpenRocket. If the voltage is high enough, the turbine will be attached to the circuit and run in the wind tunnel. We will stop the wind from the wind tunnel after the time to apogee given in OpenRocket and measure the current provided by the capacitor discharge and resistor. If this current is close to the current measured by the altimeter, the turbine will be a feasible payload. IV.B. Mission Performance Predictions USA Launch Society’s mission performance criteria is to achieve the following events: • Achieve a maximum altitude of 5,280 feet (1 mile), or as close as possible. Note: A maximum altitude of 5,280 feet is chosen rather than a minimum since the flight score penalty for overshooting the target altitude is twice as much as undershooting. • Successfully eject the top body tube and deploy the drogue parachute at apogee. • Successfully eject the nose cone and deploy the main parachute within the range of 2500 to 2000 feet as the rocket is descending. • Achieve a safe landing and recovery of the rocket with intact parts to be reused. Figure 22. Flight simulation from OpenRocket that considers no wind speed. 45 of 62 American Institute of Aeronautics and Astronautics Figure 23. Flight simulation from OpenRocket that considers minimal amounts of wind speed. As seen in the flight profile simulations, the predicted point of apogee is 5992 ft. as modeled with a wind speed of 4.47 mph, and 5997 ft. with wind speed neglected. The maximum acceleration of both simulations was 489 fs2t The simulated vehicle data is as given in the figure: Figure 24. Simulated vehicle data from OpenRocket. The weight of each component as well as the center of gravity (CG) and center of pressure (CP) are given in the following figure: Figure 25. Component analysis of each component of the vehicle via OpenRocket. 46 of 62 American Institute of Aeronautics and Astronautics Figure 26. Loki K690 motor thrust curve for a generic launch.11 The thrust curve given in the figure above, as obtained from THRUSTCURVE.ORG, can be used to determine the force of the thrust, Fthrust . This thrust curve can be analyzed in order to yield a forcing function to be used in Newton’s second law, and can also be evaluated to yield natural frequencies for vibrational analysis. IV.C. IV.C.1. Drag Legend for Drag ρ = air density V = velocity A = cross sectional area of the body tube CD = drag coefficient CDN = drag coefficient of the nose shape CDBT = drag coefficient of the body tubes CDB = drag coefficient of the base CDF = drag coefficient of the fins CDint = interference drag coefficient CDLL drag coefficient of the launch lugs (L/d) = total length of the rocket divided by the outside diameter of the rocket SW = total surface area of nose cone and body tube SBT = cross-sectional area of nose cone and body tube Cf = skin friction coefficient t = maximum thickness of each fin c = fin root chord SF = fin surface area NF = number of fins d = maximum diameter of rocket body CR = the fin root chord length SLL = cross-sectional area of the launch lug α = angle of attack ∆CDα = incremental drag coefficient 47 of 62 American Institute of Aeronautics and Astronautics Drag is a very significant factor in determining the rocket’s performance, and verifying that the rocket is robust enough to withstand the expected loads. The influence of size, speed, shape, density of the air and angle will contribute to the drag of the body. These factors are expressed in the basic equation for drag:9 Fdrag = 1 CD ρV 2 A 2 (6) It is particularly useful to determine the drag coefficient term CD in the equation. Since the drag is dependent on velocity and air density, noting that these values can change at any instance during rocket flight, it is more useful to obtain the overall drag coefficient to be multiplied by the other factors in the equation. Therefore, the following subsections will explain the methods for determining the drag coefficients for each component of the rocket. The overall drag coefficient for a model rocket is expressed as the summation of each components as follows:9 CDO = CDN + CDBT + CDB + CDF + CDint + CDLL (7) The subscript, O, in CDO is used to represent the drag of the rocket when it is moving directly into the wind. This is also known as having a zero angle of attack relative to the wind. This will give the lowest possible value for the drag coefficient, thus resulting in the lowest possible value for the drag of the rocket. It is good to get the minimum drag first since this gives a goal to try to attain. However, since rockets operate at various angles of attack, it is important to determine the impact this produces on the rocket’s drag.9 The current analysis will consist of focusing on determining the drag coefficients at zero angle of attack. This will serve as the starting point for obtaining an overall drag coefficient. Once a sufficient value has been obtained for the zero angle of attack case, various angles of attack will then be incorporated to result in a better approximation. IV.C.2. Body Tubes Extensive tests have been performed through the study of aerodynamics to provide a useful formula to determine the drag coefficient of the body tube with the nose cone included:9 SW 1.5 (8) CDN + CDBT = 1.02Cf 1 + 1.5 (L/d) SBT The skin friction Cf is dependent on the Reynolds number.The Reynolds number will determine if the air boundary layer flowing over the rockets surface is laminar or turbulent. For air flows, when the value for Reynolds number is determined to be less than 100,000, the boundary layer is considered laminar. When the value is determined to be greater than or equal to 1,000,000, the value is called the critical Reynolds number (Recr ) and the boundary layer is considered to be turbulent. If the value is in between these limits (100,000 and 1,000,000), it becomes difficult to accurately predict if the flow is laminar or turbulent. This is called the transition zone.9 To determine the Reynolds number, the following equation can be used: Re = ρV l µ (9) Once the Reynolds number is determined, three approximate skin friction coefficients will be obtained for three different cases. The first case will be for a fully laminar flow. The second case will be for a boundary layer that begins laminar and then transitions into a turbulent boundary layer once the critical Reynolds number is reached. The third case will be for a boundary layer that is fully turbulent. The average skin friction coefficient equation that will be used for fully laminar flow is defined as:17 1.33 Cf = √ (10) Re The average skin friction coefficient equation that will be used for the laminar flow transitioning into turbulent flow is as follows:6 Cftran = 0.523 1520 − [ln(0.06Re)]2 Re (11) The average skin friction coefficient equation that will be used for the fully turbulent flow is given as:17 48 of 62 American Institute of Aeronautics and Astronautics 0.074 (12) Re0.2 Another significant location on the body tube to consider is at the base (rear of rocket). The drag at the base is due to the pressure unbalance from the separation of the air flow at the end of the rocket. The base drag coefficient can be approximated by using the following equation:9 Cf = CDB = p IV.C.3. 0.029 CDN + CDBT (13) Interference Drag The interference drag is the result of the air passing over the body tube interacting with the air flowing over the fins. Sharp corners where the fins meet will increase interference causing a higher drag while smooth, filleted corners decrease interference causing lower drag.9 The interference drag coefficient can be determine from the following equation: CDint = CDOF IV.C.4. CR d xnumberof f ins SBT 2 (14) Launch Lug Drag A method that can be used to determine a value for launch lug drag is to obtain an upper limit on the drag coefficient. This is done by establishing the worse case scenario for a launch lug. For example, if cylindrical launch lugs are used, the worse case would be to have a solid disc standing at a right angle to the flow. The drag coefficient for a disc at right angles to the flow is around 1.2.9 By using the following equation, the upper limit launch lug coefficient can be determined. CDLLup = 1.2 SLL SBT (15) Since the launch lugs for this example are cylindrical and not solid flat discs, they will have two surface areas that experience skin friction drags. The surface area for the cylinder is composed of the inner and outer surfaces. SLLw = πdout l + πdin l (16) The surface area, SLLw , will then be incorporated into the upper limit launch lug coefficient equation to obtain the equation for the upper limit coefficient of launch lugs which is written as the follows:9 CDLL = 1.2SLL + SLL SBT (17) This method can also be performed for non cylindrical shaped launch lugs by using the cross-sectional area and surface areas associated with the different shape. IV.C.5. Stability Stability is a significant factor that needs to be considered when designing rockets. It is a must that a rocket be stable in order to achieve the best and safest flight possible. The first rule to be followed in achieving stability is that the rocket’s center of pressure must be aft its center of gravity. The distance between the center of gravity and center of pressure is the static margin, also known as the ”caliber of stability.” The center of gravity should be at least one body tube diameter fore the center of pressure.7 In 1966, James S. Barrowman and Judith A. Barrowman presented their research and development project titled, The Theoretical Prediction of the Center of Pressure. The authors successfully derived and simplified the resulting subsonic theoretical center of pressure equations for general rocket configurations. The equations found in Barrowmans’ project has provided an accurate method for calculating the center of pressure for subsonic model rockets and became the staple method for model rocketeers. In recent years, these equations have been integrated into computer software programs such as OPENROCKET to allow a 49 of 62 American Institute of Aeronautics and Astronautics quick and easy center of pressure calculation. As the designer changes rocket configurations, the computer software simultaneously computes the center of pressure and stability margin. Therefore, to simplify the center of pressure calculation, USA Launch Society will be using the computer program OPENROCKET. The computer software approximately located the center of gravity as 67.228 in. in aft the tip of the nose cone and the center of pressure as 74.464 in. in aft the tip of the nose cone. This resulting in a stability margin of 1.81 cal. The center of gravity and center of pressure locations, as well as the stability margin is represented in Figure 28. Figure 27. Relationship of the center of gravity relative to center of pressure from OpenRocket When a rocket is in flight it experiences forces that will cause the rocket to rotate about its center of gravity. This is called the moment acting on the rocket and is divided into three components: the yawing moment, the rolling moment, and the pitching moment. These moments are illustrated in the figure below. Figure 28. Schematic for the roll, pitch, and yaw movements upon the vehicle that will create a moment. The fins will produce a rolling moment on the rocket if they are canted at some angle with respect to the rocket centerline.14 Since the firs for the USA Launch Society’s rocket are not canted and are placed symmetrically around the rocket body, the rolling moment does not need to be computed since it can be assumed negligible.12 The pitching moment is the result of the lift and drag forces acting on the rocket. Therefore, the pitching moment should be considered. The pitching moment can be determined by using the following equation:5 50 of 62 American Institute of Aeronautics and Astronautics ~ θ = Cm qSdjˆ1 M (18) In order to solve for this pitching moment term, the pitching moment coefficient needs to be determined. This coefficient can be found by using the following equation:12 Cmα = IV.C.6. sinα 2 [lAb − V olume] Sd α (19) Kinetic Energy The definition of a safe landing velocity being that each individual component must not possess more than 75 f t − lbf of kinetic energy at landing. This means that in order to calculate the safe landing velocity we must first account for the mass of the vehicle and divide it into its respective sections as seen in 25. Since the P.A.P section has the highest mass, it will also have the highest kinetic energy at any given speed. This fact allows for the optimal descent speed to be determined by using the of kinetic energy given in the equation below: 1 mV 2 (20) 2 Inputting the known values we can solve for the maximum allowable descent velocity of 17.83 f t/s. Allowing a 20% margin of safety, the desired descent speed becomes 14.26 f t/s. The optimal mass for the test vehicle can be determined from the following equation: Ek = AρCDP V 2 (21) 2 By inserting the known values of desired descent speed, the experimentally determined CDP of 0.8, and a parachute area of 28.26 f t2 into the above equation, the optimal mass of the vehicle is 31.35 lb. − m2 . The optimal speed can then be used to calculate the individual kinetic energies of each section. Using the equation for kinetic energy, and substituting the mass of each section and the optimal speed of 14.26 f t/s, the kinetic energies are as follows: Nosecone = 1.39 f t − lbs, P.A.P = 6.69 f t − lbs, and the Booster = 5.88 f t − lbs. W = IV.C.7. Wind Drift For preliminary determinations of wind drift, a very simple mathematical model will be used. In this model, the parachute is assumed to have no inherent horizontal motion, which in the real world is false, but the assumption allows for basic analysis of wind drift scenarios. As the recovery section progresses, these calculations will become more precise and account for more variables. These calculations will only consider the parachutes drifting after the deployment of the main parachute, and while it ignores a large amount of potential drift, it allows for more straightforward estimations. The speed of descent is assumed to be 14.26 f t/s from the point of deployment 1000 ft above the ground. The parachute is also assumed to have no tendency towards horizontal motion. Using this set of assumptions an estimated value of wind drift can be calculated for various situations. Under 0 mph wind conditions and the aforementioned assumptions, the rocket would not be expected to drift at all; although, if it had any horizontal velocity at deployment, it would likely drift in that direction. Under 5 mph wind conditions, the wind drift could be calculated by dividing 1000 by 14.26 to obtain hang time. Then multiply the hang time by the wind speed converted to f t/s (10 mph = 15 f t/s). This provides a result of 514.24 f t at 5 mph, 1028.52 f t at 10 mph, 1542.78 f t at 15 mph, and 2057.01 f t at 20 mph. 51 of 62 American Institute of Aeronautics and Astronautics V. V.A. V.A.1. Project Plan Budget Plan Rocket Structure Budget In the following tables, all the essential materials and components relating to the vehicle are listed along with reasoning and prices. Table XXIV. Rocket structure budgeting. Rocket Structure Price Reasoning Airframe $120 The team is budgeting $120 for the airframe including the nose cone. Fins $40 $40 will be budgeted for the construction of the fins. Motor Set $115 Complete motor - includes one casing, one nozzle, one forward bulkhead, two snap rings, and one nozzle washer. Center Rings $100 $100 will be used for the center rings. Miscellaneous $100 The team is adding $100 for miscellaneous items possibly needed for the airframe. Subtotal $575 $530 is the total cost of the airframe.This budget is currently tentative with respect to the material down selection which will be presented in the PDR. 52 of 62 American Institute of Aeronautics and Astronautics Table XXV. Recovery components budgeting. Recovery Components Price Reasoning E-matches $80 There will be a set $80 budget for e-matches. Cable Cutters $80 Used for dual deployment purposes from the same bay. Main Parachute $75 The team will manufacture the main parachute with the given budget. Drogue Parachute $25 The team will manufacture the drogue parachute with the given budget. Black Powder $20 There will be a budget of $20 for black powder. Shock Cord $0 No cost due to the team having an ample amount of shock cords from previous launches. Miscellaneous $100 Flexible amount in the event of emergency. Sewing Machine $0 Members of the team possess a sewing machine. Subtotal $380 The projected budget strictly for recovery components. 53 of 62 American Institute of Aeronautics and Astronautics Table XXVI. Altimeter bay budgeting. Altimeter Bay Price Reasoning Altimeter $0 The team will have access to MiniAlt/WD, Stratologger, Telemetrum, and Jolly Logic altimeters. Shear Pins $0 Both 2-56 and 4-40 shear pins are available in the Aerospace Propulsion Lab. Misc. Components $100 Extra parts and supplies such as switches, screws, bolts, batteries, glue, etc. E-match Material $100 Includes prefabricated wires or wires and ignition. Bay Casing $70 The team may build the altimeter bay from scratch. However, LOC/precision is being considered being that it is available in different diameter tubing. Ejection Charge $130 Ejection charging material needed to separate the sections of the rocket includes black powder, pyrodex, and CO2 kits. Subtotal $400 The subtotal describes the range of price for the components and parts for the altimeter bay to be between $300-$500. Table XXVII. Certification budgeting. Certifications Price Reasoning Certification Kits (x2) $200 The team will budget $200 for certification kits to be flown September. V.A.2. Certification Motors (x2) $160 The team is budgeting $160 for certification motors. Subtotal $360 The total cost of the certification is $360. Outreach Budget The team recognizes the involvement of young students as a fundamental part of the project. For this reason, the team is working together with outreach specialist Kelly Jackson to participate in events that can motivate students to study mathematics and science. Therefore, the team has prepared a budget to participate in this activities. The budget is illustrated below. 54 of 62 American Institute of Aeronautics and Astronautics Table XXVIII. Outreach budgeting. Outreach Price Reasoning Model Parachutes (x10) $75 The team is budgeting $75 that is divided into 4 yards of nylon and lines for the parachutes. Straws $10 $10 is budgeted to buy regular straws for a pressure rocket system. Gas per Visit (x7) $100 $100 is designated for gas to attend the outreach activities. Rocket Motors (x10) $200 $200 is budgeted for the mini rockets that will be launched at schools. Subtotal V.A.3. $385 The subtotal cost for the the outreach activities is $385. Budget for Trips to Samson, Alabama The budget for the trips to Samson, AL is fundamental for both testing and evaluation of the rocket. The trips are going to allow the team to launch the rockets with the payload and perform the test for the entire time of the project. The budget overview relative to this is provided below: Table XXIX. Budget for traveling to Samson, AL. Travel to Samson, AL Price Reasoning Samson, AL (Driving x10) $900 The team is projected to attend a potential of 10 available launches. One will be held once every 3 weeks starting September 12, 2015. Subtotal $900 Total for transportation to launches in Samson, AL. 55 of 62 American Institute of Aeronautics and Astronautics V.A.4. Huntsville Budget Plan In the following table, the team presents a budget plan to travel to Huntsville, AL. The team will drive approximately 5 hours to Huntsville, AL and stopping one time per trip. Hotel expenses are also budgeted for staying in Huntsville, AL for 3 to 4 days. Table XXX. Budget for trip to Huntsville, AL. Travel to Huntsville, AL Price Reasoning Driving (3 cars) $405 In order to budget for the trip to Huntsville, AL, there will be 3 vehicles taken. It will be an estimate of $90 per car for round trip, and an additional $45 for travel within the city. Food (x5) $300 $300 is budgeted for the teams food expenses. Hotel (3 nights) $700 The team is budgeting $700 for hotel expenses for approximately 8 people. Subtotal $1405 The total for travel cost to Huntsville, AL considering all the gas, food, and lodging prices. V.A.5. Total Project Cost Table XXXI. Total project budgeting. Total Project Cost Price Rocket Structure $575 Payload $800 Recovery Components $380 Altimeter Bay $400 Certifications $360 Outreach $385 Travel to Samson, AL $900 Travel to Huntsville, AL $1405 Total Project Cost $5205 56 of 62 American Institute of Aeronautics and Astronautics V.B. Funding Plan The funding plan is a fundamental aspect for the project to be a success. Without any funding, it is nearly impossible for the team to have a budget for the vehicle to be fully constructed. For this reason, the team has requested funding from three major organizations: the Student Government Association (SGA), Alabama Space Grant Consortium (ASGC), and other local companies such as Airbus. The Student Government Association will be able to provide $2000 for the project plus an additional $1000 for travel expenses. In addition, the team will apply for the Alabama Space Grant Consortium (outreach program) to obtain $5000 to provide for conferences, seminars, and supplies that can contribute with the promotion of science for young students in the area. At the same time, the team will contact local companies for sponsorships that can help the project become a success. V.C. Project Timeline This section will cover the vital events the team will encounter that involves with NASA deadlines and launch days. A Gantt chart will also be provided in order to give a visual organization of team events. V.C.1. Event and Submission Schedule Table XXXII: Event and submission schedule. August 2015 Event 7 Request for Proposal (RFP) goes out to all teams. September 2015 11 Electronic copy of completed proposal due to project office by 5 P.M. Central Time. 11 Finalize Inventory for SEARS Launch. 12 SEARS Launch in Samson, AL. October 2015 2 Awarded proposals announced. 3 SEARS Launch in Samson, AL. 7 Kickoff and PDR Q&A. 23 Team web presence established. November 2015 6 Preliminary Design Review (PDR) reports, presentation slides, and flysheet posted on the team website by 8:00 A.M. Central Time. 7 SEARS Launch in Samson, AL. 9-20 PDR video teleconferences. 57 of 62 American Institute of Aeronautics and Astronautics December 2015 4 Critical Design Review (CDR) Q&A. 5 SEARS Launch in Samson, AL. January 2016 15 CDR reports, presentation slides, and flysheet posted on the team website by 8:00 A.M. Central Time. 16 SEARS Launch in Samson, AL. 19-29 CDR video teleconferences. February 2016 3 Flight Readiness Review (FRR) Q&A. 6 SEARS Launch in Samson, AL. 27 SEARS Launch in Samson, AL. March 2016 14 FRR reports, presentation slides, and flysheet posted to team website by 8:00 A.M. Central Time. 19 SEARS Launch in Samson, AL. 17-30 FRR video teleconferencses. April 2016 5-7 AIAA Student Conference in Starkville, MS. 13 Teams travel to Huntsville, AL. 13 Launch Readiness Reviews (LRR). 14 LRRs and safety briefing. 15 Rocket Fair and Tours of MSFC. 16 Launch Day. 17 Backup Launch Day. 29 Post-Launch Assessment Review (PLAR) posted on the team website by 8:00 A.M. Central Time. 58 of 62 American Institute of Aeronautics and Astronautics May 2016 11 V.C.2. Winning team announced. Gantt Chart Figure 29. Gantt chart showing the projected schedule for the team to complete competition tasks. V.D. V.D.1. Educational Outreach Purpose As actively involved members of our surrounding community, our goal is to share our knowledge, interests, and experience to the collective body of the Gulf Coast and South regional area. With the expansion of intellectual knowledge as our motivation, we seek to engage middle school and high school students in learning to promote higher education in the fields of mathematics and science. Elementary students will have an opportunity to expand their interest in rocket science and be exposed to simplified engineering principles. To correspond with the USLI competition, our outreach events will focus on the various aspects of rocket science, including its history and technological advancements, to enhance the minds of younger intellectuals. 59 of 62 American Institute of Aeronautics and Astronautics V.D.2. Status of Outreach Currently, there are 7 members on the team. One member, Phillip Ruschmyer, has been recently assigned to the team due to senior design projects. Mr. Ruschmyer will be caught up to the current state of the project and will contribute in any way that he can will very basic rocketry knowledge. Another member, Kayla Bell, is a high school student from the Alabama School of Math and Science. The College of Engineering was approached by the Alabama School of Math and Science about hosting an intern that has a strong interest for engineering from the high school. The chair of mechanical engineering, Dr. David A. Nelson, asked the University of South Alabama Launch Society if the team would be willing to allow her to intern with us. The team happily accepted Kayla as part of the team and will help her be involved with the project as much as possible. Throughout the course of the project, the team has assigned her supervised tasks to allow her to expand her knowledge in rocketry, physics, and engineering as well as being a solid contributor to the USLI competition. The remaining 5 members have been heavily involved since the beginning of the project in August 2015. V.E. Schedule for Outreach Events Webmaster John Faulk and vice president Nghia Huynh will visit their high school, Faith Academy, located in Mobile, Alabama, to perform demonstrations of rocketry to high school physics and engineering students. As of now, the outreach to Faith Academy includes only high school students; however, further outreach can be performed in order to have elementary and middle school students involved. President Andrew Tindell and secretary Kent Lino will visit their high school, Escambia High School, located in Pensacola, Florida, to demonstrate rocketry to high school engineering students there. Treasurer Conner Denton’s high school, T.R. Miller High, located in Brewton, Alabama, will teach high school physics students the basics of aerodynamics through paper rockets. Although each school has been listed by its respective member, all members of the team are able to go to other members’ high school. Phillip Ruschmyer resided in Colorado before being admitted to the university; therefore, due to travel costs, Mr. Ruschmyer’s high school will not be visited. Since Kayla Bell is currently a high school student, the team will allow her to organize an outreach event to her school. At least one member of the society will accompany her whenever she plans for the outreach event. All the outreach events by the team will most likely be building paper rockets and have a competition for who can launch the rocket the highest. Below in Table XXXIII is the current plan for outreach events for the team. Table XXXIII. Outreach events schedule. Date Location of Outreach November 13, 2015 T.R. Miller High School in Brewton, AL December 11, 2015 Faith Academy in Mobile, AL December 14, 2015 W.S. Neal Elementary School in Brewton, AL January 12, 2016 Escambia High School in Pensacola, FL February 11, 2016 Bay Minette Elementary School in Daphne, AL February 15-19, 2016 U.S.A. E-Week in Mobile, AL As seen in Table XXXIII, elementary schools are scheduled to be outreached to as well. The dates for any outreach in the year 2016 is still tentative because the team do not know how next semester’s schedule will flow. University of South Alabama’s engineering week, U.S.A. e-week, is a week long event that hosts competitions between all of the departments in engineering. Competitions may include but not limited to trivia games, sporting events, and eating competitions. However, during e-week, the university invites local high schools and middle schools to attend the event as well, giving a perfect opportunity to perform more 60 of 62 American Institute of Aeronautics and Astronautics outreach events. Some outreach activities include building paper rockets or allowing the students to design their own parachute in a competition of which student could create a parachute with the most drag. VI. Conclusion It is apparent through this document that the USA Launch Society has made every effort possible to prepare a detailed plan for the remainder of the competition. The payloads that are being researched are still in their youth, but they are in the process of being heavily researched in order to mature their design. The team has already overcome numerous issues regarding the payload development including safety issues with alternative energy supplies for deployments, a comparatively low budget and group size, timing issues for the wind turbine power supply, etc. The team plans to continue the hard effort towards the payload development. Also, the team is ecstatic about the exciting opportunities in the near future. The proposed payloads offer increased safety and cleaner energy sources for the future of rocketry. In rocky, rough climates such as Mars, hazard detection is a key to the future. With increased interest in future missions to the Red Planet, innovations in hazard detection for descent vehicles is essential. This can save NASA money and effectiveness. Due to questionable climate change conditions as well as financial concerns, alternative energies are crucial. Alternative energies are the future of this world due to increasing restrictions and fossil fuel depletion. Harnessing wind is an energy that will never cease to exist. Acknowledgments Before this report is complete, the USA Launch Society would like to thank the following people for their support and expertise: • Dr. Carlos Montalvo • Dr. David Nelson • Dr. John Steadman • Mr. John Hansel • Mr. Kendall Brent • Mr. Chris Short All of these men have vastly helped to improve the efforts of the USA Launch Society. Their future support is monumental to the longevity of this team. 61 of 62 American Institute of Aeronautics and Astronautics References 1 National 2 Inc. Aeronautics and Space Administration. Nasa student launch non-academic handbook. pages 58–59, 2015. Apogee Components. Frequently asked questions about dual deployment rockets. Peak of Flight Newsletter, pages 1–9, 2012. 3 Tripoli Rocketry Association. Tripoli level 2 certification. http://www.tripoli.org/Level2. Accessed: 10/24/2015. 4 Tripoli Rocketry Association. Code for high power rocketry. page 1, 2012. 5 C. W. Besserer. Principle of Guided Missile Design. D. Van Nostrand Company, Inc., 2004. 6 Wade W. Huebsch Alric P. Rothmayer Bruce R. Munson, Theodore H. Okiishi. Fundamentals of Fluid Mechanics. John Wiley and Sons, Inc., 7th edition, 2013. 7 Mark Canepa. Modern High-Power Rocketry. Trafford Publishing, 2nd edition, 2004. 8 Gerald M. Gregorek. Aerodynamic drag of model rockets. TR-11 Model Rocket Technical Report, 3(09), 1970. 9 Gerald M. Gregorek. Aerodynamic Drag of Model Rockets. Estes Industries, Inc., tr-11 model rocket technical report edition, 1970. 10 Theo W. Knacke. Parachute recovery systems: Design manual. 1992. 11 Mark Koelsch. Thrust curve for loki k690 motor. http://www.thrustcurve.org/simfilesearch.jsp?id=2117. Accessed: 10/26/2015. 12 Sampo Niskanen. Development of an Open Source Model Rocket Simulation Software. Helsinki University of Technology, Finland, 2009. 13 National Association of Rocketry. N.a.r. model rocket safety code. Estes Rocket Lab, page 1, 2001. 14 George M. Siouris. Missile Guidance and Control Systems. Springer, 2004. 15 Gary A. Crowell Sr. The descriptive geometry of nose cones. pages 1–9, 1996. 16 David Stribling. Ogive nose cones. NAR Technical Reports, page 1, 2012. 17 Ashish Tewari. Atmospheric and Space Flight Dynamics. Birkhauser, 2007. 62 of 62 American Institute of Aeronautics and Astronautics