The Remote Interaction Planning and Visualization Tool by B.S.,
advertisement

The Remote Interaction Planning and Visualization Tool
by
Robert Shibli Damus
B.S., Ocean Engineering (1999)
Massachusetts Institute of Technology
Submitted to the Department of Ocean Engineering
in Partial Fulfillment of the Requirements for the Degree of
Master of Science in Ocean Engineering
at the
MASSACHUSETTS INSTITUTE OF TECHNOLOGY
June 2001
Massachusetts Institute of Technology 2001
All rights reserved.
S ignatu re of A uthor ....................................
.
-... -....
..... ..
Department of Ocean Engineering
May 11, 2001
Certified by ..............................................................
Nicholas M. Patrikalakis, Kawasaki Professor of Engineering,
Professor of Ocean Engineering and Mechanical Engineering
-- Thesis Supervisor
Accepted by ......................................
.
..
. . . . . . . . .
Henrik Schmidt r ssor of Ocean Engineering
Chairman, Departmentah ommittee on Graduate Studies
MASSA CHUSETTS INSTITUTE
OF TECHNOLOGY
BARKER
JUL 11 2001
LIBRARIES
The Remote Interaction Planning and Visualization Tool
by
Robert S. Damus
Submitted to the Department of Ocean Engineering
on May 7, 2001 in partial fulfillment of the requirements for the degree of
Master of Science in Ocean Engineering
Abstract
Unmanned observation of the ocean will continue to be an area where the nascent class of
autonomous underwater vehicles (AUVs) need to communicate either locally or remotely
with an operator for the purposes of updating mission parameters and offloading of data.
Such a scenario poses several important questions to the underwater vehicle community
that has been addressed in my research. This thesis investigates the evolving software
technologies that will allow for large-scale operation of a multi-user environment for
control of multiple vehicles. In particular, the software tool developed, known as the
Remote Interaction Planning and Visualization (RIPV) tool, is written in Java and takes
advantage of Java's distributed computing capabilities.
The RIPV architecture provides for remote monitoring of and interaction with
vehicles sampling in the water column, a relational database model for storing extracted
vehicle data in a database repository, and a means of interfacing the visualization
capabilities of Matlab. This will provide the user the ability to do on-the-fly mission
planning, all from a web browser that loads a lightweight applet without installing
software on their machine. A central server known as the RIPVServer handles clients by
marshaling their requests to the appropriate service, called an RIPVService, that have
registered with the system. The functionality of the services is made available to the
client through the graphical user interface that loads in the web browser.
The
RIPVServer accesses the services via Remote Method Invocation (RMI), after calling
methods that are made available in a public remote interface.
Three core services provide the RIPV system with its basic functionality: a
service for interfacing a serial port, one that interacts with a database, and a service that
produces Matlab visualizations.
They are known as the SerialPortServer, the
DatabaseServer, and the DataVisServer. Cross platform independence is achieved in the
RIPV framework and the code is designed to be adapted and functionality extended
through the introduction of new RIPVServices.
Thesis Supervisor: Nicholas M. Patrikalakis, PhD
Title: Kawasaki Professor of Engineering
2
Acknowledgements
Prior to my leaving undergraduate life, and without any better ideas, I applied to the
Ocean Engineering graduate program here at MIT, and in my letter of intent wrote about
how I would use a Web browser to control an underwater vehicle from afar. It seemed
like the kind of thing that would get me into a graduate program - the idea is high tech,
trendy, and would let me play with robots. Lo and behold, two years have passed, and
those musings are now a reality.
This thesis represents a honing of my skill-set as a human, and was made possible in
large part by interacting with my brilliant advisor, Professor Nicholas Patrikalakis. I am
forever indebted to him for his keen insight into the problems that relate to this work as
well as the contrast in which he would approach how I had thought about a solution.
Without this pressure to deviate from my thought processes, my perpetual intellectual
orbit would have remained at a fixed radius.
I also appreciate my conversations with Dr. Wonjoon Cho and Dr. Spyros Lalis, both of
whom took time out of their life to offer useful advice.
Professor Chryssostomos Chryssostomidis was kind enough to support my efforts to
apply to the MIT OE Masters program, and one of my first undergraduate advisors,
Professor John Leonard, was also the first person to get me thinking about this topic
during my senior year in his design class.
Without the assistance of Fred Baker, III, the Design Lab would cease to exist, and
therefore I extend heartfelt thanks for his work in keeping the machines up and running.
I must thank my parents for the emphasis they put on education during my development,
especially my mother and her tactics used to motivate me when it counted. They also had
3
another son whose humor-laden antics have kept me out of the loony bin, and thus I must
give him some props, too.
Funding for this work was obtained in part from MIT Sea Grant's Industrial Fellowship,
the Webb Research Corporation and MIT Ocean Engineering.
This thesis is dedicated to my Uncle Bob. His spirit shines brightly over my shoulder.
4
Table of Contents
A B S T RA CT ................................................................................................................
2
A CKN O WLED G EM ENTS ..........................................................................................
3
TABLE O F C O N TEN TS ...............................................................................................
5
LIST O F FIG U RES .......................................................................................................
9
LIST O F TA BLES .......................................................................................................
11
A BBREV IA TION S .....................................................................................................
12
CRHA PTER 1 ....................................................................................................................
14
IN TRO D U CTION ...................................................................................................
14
1.1 COMMUNICATING W ITH DATA ...............................................................................
14
1.2 M OTIVATIONS.......................................................................................................
15
1.3 W EB SPACE...........................................................................................................
19
C HA PTER 2 ....................................................................................................................
22
REMOTE INTERACTION PLANNING AND VISUALIZATION.......................22
2.1 PROBLEM STATEM ENT ..........................................................................................
22
2.1.1 Vehicle Management....................................................................................
25
2.1.2 User Management ........................................................................................
27
2.1.3 Data Management........................................................................................
28
2.1.4 Heterogeneous Computing Environments....................................................
30
2.2 THE RIPV A PPROACH..........................................................................................
5
30
2.2.1 DistributedComputing..................................................................................
31
2.2.2 Adaptability...................................................................................................
33
2.2.3 Accessibility..................................................................................................
33
2.2.3.1 A ccessing as a U ser...............................................................................
34
2.2.3.2 Being the H ost........................................................................................
35
2.2.3.3 Being a Service......................................................................................
35
2.2.3.4 Example of Being the Host, a Service, and a Client .............................
35
CHA PTER3 ....................................................................................................................
37
HIGH LEVEL PROGRAMMING METHODS ......................................................
37
3.1 O BJECT ORIENTED PROGRAMM ING .......................................................................
37
3.2 JAVA ........................................................................................................................
37
3.3 D ISTRIBUTED OBJECTS..........................................................................................
38
3.4 REM OTE M ETHOD INVOCATION .............................................................................
40
CH A PTER 4 ....................................................................................................................
44
THE RIPV SY STEM ...................................................................................................
44
4.1 O VERVIEW ...............................................................................................................
44
4.1.1 The RIP VServer.............................................................................................
47
4.1.2 The RIP VClient .............................................................................................
50
4.1.3 RIP VClient's GraphicalUser Interface layout.............................................
54
4.1.3.1 The CO M Panel.........................................................................................
56
4.1.3.2 The MA M Panel........................................................................................57
4.1.3.3 The FIM Panel...........................................................................................
58
4.1.4 The RIP VServices.........................................................................................
59
6
4.1.4.1 SerialPortServer ........................................................................................ 61
4.1.4.2 DatabaseServer .......................................................................................... 64
4.1.4.3 DataVisServer ........................................................................................... 66
4.2 FEATURES ................................................................................................................ 68
CHAPTER 5 ....................................................................................................................69
CODE ARCH ITECTURE .............................................................................................. 69
5.1 OBJECTIVES .............................................................................................................. 69
5.2 DESIGN CONSIDERATIONS ........................................................................................ 69
5.2.1 Real Time Systems ............................................................................................ 70
5.2.2 Telesemantics ................................................................................................... 71
5.2.3 TransportLayers .............................................................................................. 72
5.2.4 Application-OrientedDesign ........................................................................... 73
5.2.5 Communication Model ..................................................................................... 76
5.2.6 Process Management....................................................................................... 77
5.3 PACKAGE STRUCTURE AND CLASS HIERARCHY ....................................................... 82
5.4 DATABASE SCHEMA ................................................................................................. 83
CHAPTER 6 .................................................................................................................... 85
IM PLEM ENTATIO N ..................................................................................................... 85
6.1 HARDWARE SETUP ................................................................................................... 85
6.2 O/S PLATFORMS ...................................................................................................... 85
6.3 BROW SER SOFTWARE ............................................................................................... 86
6.4 TESTBED .................................................................................................................. 86
6.5 TESTING ................................................................................................................... 87
7
6.5.1 Serial PortInterfacing.................................................................................
87
6.5.2 Database Connectivity .................................................................................
88
6.5.3 D ata Visualization.........................................................................................
89
CHAPTER 7 ....................................................................................................................
90
CONCLUSIONS AND FUTURE W ORK ....................................................................
90
7.1 CONCLUSIONS .........................................................................................................
90
7.2 FUTURE W ORK......................................................................................................
93
7.2.1 New Functionality........................................................................................
93
7.2.2 Java Beans....................................................................................................
94
7.2.3 Mission PlanningEfficiency ........................................................................
94
7.2.4 Autonomous Mission Planning....................................................................
95
96
APPENDIX A - NAM ING CONVENTIONS ..............................................................
APPENDIX B - M APPINGS..........................................................................................97
APPENDIX C - DATABASE SCHEMA AND CODE................................................99
APPENDIX D - CGI SCRIPT & MATLAB FILE ....................................................
102
APPENDIX E - SETUP.READM E.........................................................................
111
APPENDIX F - CLASS HIERARCHY.......................................................................117
CLASS HIERARCHY.......................................................................................................
117
INTERFACE HIERARCHY ...............................................................................................
119
REFERENCES..............................................................................................................120
8
List of Figures
Figure 1.1: The AOSN concept off the coast of New Jersey at LEO15 ........................
16
Figure 1.2: Slocum is an AUV designed for long duration deployment............
17
Figure 2.1: W ays to implem ent DDP ............................................................................
32
Figure 3.1: Considerations in programming language choice for RIPV....................... 38
Figure 3.2: Distributed program using remote procedure paradigm.............................
39
Figure 3.3: Competing remote method technologies ...................................................
41
Figure 4.1: The core components of the RIPV system .................................................
44
Figure 4.2: RIPV Server conceptual layout ...................................................................
49
Figure 4.3: RIPV star network configuration...............................................................
50
Figure 4.4: RIPVClient layout with CGI upload in Web browser .................................
52
Figure 4.5: The ServiceLayoutPanel and the four JPanels that comprise it.................. 55
Figure 4.6: The C O M Panel..............................................................................................
56
Figure 4.7: The M A M Panel .............................................................................................
57
Figure 4.8: The FIM Panel................................................................................................
58
Figure 4.9: Serial port interfacing using the java.comm package .................
61
Figure 4.10 SerialPortServer conceptual layout.............................................................63
Figure 4.11: DatabaseServer conceptual layout ...........................................................
65
Figure 4.12: DataVisServer conceptual layout ............................................................
67
Figure 5.1: Socket connection between the RIPVServer and RIPVClient .................... 73
Figure 5.2: M ailB ox queues..........................................................................................
77
Figure 5.3: RIPVServer architecture with pseudo code...............................................79
Figure 5.4: RIPVService architecture with pseudo code ...............................................
80
Figure 5.5: RIPVClient process management ...............................................................
82
Figure 5.6: Conceptual Schema for database storage of vehicle data...........................84
9
Figure 6.1: Succesful 'dir' command returns directory listing from CF1...........87
Figure 6.2: Returned database queries ..........................................................................
88
Figure 6.3: Simple 2-D data plot....................................................................................
89
10
List of Tables
Table 5.1: RIPV packages............................................................................................
Table 7.1: Advantages and Disadvantages of the RIPV System...................................92
11
83
Abbreviations
Abbreviation
Meaning
AOSN
Autonomous Ocean Sampling Network
AUSI
Autonomous Undersea System Institute
AUV
Autonomous Underwater Vehicle
CGI
Common Gateway Interface
COM
COmmunications Management
CORBA
Common Object Request Broker Architecture
DB
D shell connector size B
DAB
DAta Base
DAV
DAta Visualization
DBMS
Database Management System
DCOM
Distributed Component Object Model
DDP
Distributed Data Process
DIS
Distributed Information System
DISOP
Distributed Information System for Ocean Processes
EIA
Electronics Industry Association
FIFO
First In First Out
FIM
FIle Management
FK
Foreign Key
GIS
Geographic Information System
GUI
Graphical User Interface
IDL
Interface Definition Language
12
JPEG
Joint Photographic Experts Group
JRE
Java Runtime Environment
JVM
Java Virtual Machine
MAM
MAilbox Management
MBARI
Monterrey Bay Aquarium Research Institute
MOOS
MBARI Ocean Observatory System
OLE
Object Linking and Embedding
ONC
Open Network Computing
OOP
Object Oriented Programming
PE
Processing Element
PK
Primary Key
RF
Radio Frequency
RIPV
Remote Interaction Planning and Visualization
RPC
Remote Procedure Call
RS
Recommended Standard
RX
Receive
SGI
Silicon Graphics
SQL
Structured Query Language
TLO
Task Level Organization
TTL
Transistor Transistor Logic
TX
Transmit
URI
University of Rhode Island
VIP
Vehicle Instrument Platform
WRC
Webb Research Corporation
13
Chapter 1
Introduction
1.1 Communicating with data
The current state of communication technologies has moved the concepts implicit in
remote sensing of the ocean closer to becoming a reality. Before we can expect vehicles
with finite storage capacities and limited behavior sets to exhibit truly autonomous
adaptive analysis of a desired underwater region, exploiting the revolution of data
delivery channels must be examined. This thesis investigates the evolving software
technologies that will allow for large-scale operation of a multi-user environment for
control of multiple vehicle instrument platforms. For such a platform to be integrated
into a multi-level, multi-disciplinary application, a means of direct connection between
the user and the actual ocean parameter being observed is essential. Taking this one step
further, maximum value is achieved by a system that is capable of independent use by
researchers located remotely from the actual site of the network conducting the ocean
research. The Remote InteractionPlanningand Visualization (RIPV) tool has been
developed in the Java programming language to assist vehicle operators in their approach
to mission planning by making it possible to manipulate data from a vehicle, store the
information in a database repository, or produce visualizations products from the data, all
from an interface supplied to their World Wide Web Browser.
14
1.2 Motivations
Operator assistance for underwater robotic missions has entered into an age where it is
often not necessary to be within the locale of the vehicle to have eventual access to the
parameters the vehicle is observing. NASA developed the first telerobotics platforms
[NASA], and the concept gained momentum in the underwater vehicle community with
the introduction of Autonomous Underwater Vehicles (AUVs) as exemplified in the
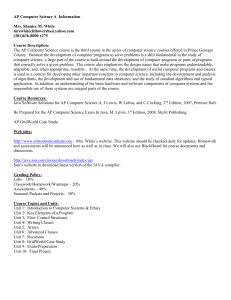
Autonomous Ocean Sampling Network [Curtin 93], where a network of vehicles
continually samples an area, offloading the data they gather and then receiving new
instructions for action (see figure 1.1). Three communications links are seen in the final
AOSN system: 1)AUV to node (via acoustic modem), 2)node to shore(via radio or
satellite), and 3) shore to scientist (via the Internet). This thesis is motivated by the
second and third aspects of the AOSN communications structure, as they are currently
being examined and proof of the concept has been shown in experiments involving
AUVs in the Haro Strait [Schmitt 96], and Buzzards Bay [Kim 96].
AOSN is an example of a network of multiple Vehicle Instrument Platforms (VIPs)
where the main idea is that that a network of research vehicles and distributed acoustic
and point sensors would do a better job of canvassing the ocean in order to improve upon,
among other things, the spatial resolution of sampled data sets. That a research vehicle
could be used as a multi-user platform is implicit in the design of the AOSN. To date,
however, there is little experience associated with this endeavor because of the lack of a
communication interface that is easily used by multiple users to support a shared
environment for multiple distributed VIPs, as well as several gaps in the facets of the
system, namely long-duration vehicles to test the validity of such interfaces [Chappel 00].
15
Figure 1.1.: The AOSN concept off the coast of New Jersey at LEOJ5
It is inherent in the design of a true AOSN that the vehicles doing the observation will do
so in an unsupervised fashion, but periodically unload information at specified nodes
which is then disseminated to the appropriate computational engines for evaluation and
updating of mission objectives; the goal being that an operator has little or nothing to do
with how the data is processed, rather they are useful in diagnosing vehicle failures or
networking issues. With respect to this paradigm of operation in the ocean environment,
we are far from implementing such a system [Robinson 99, Malanotte-Rizzoli 99].
Continual observation of a vehicle and its functional state is the norm, and often the only
way to guarantee the validity of measurements and evaluate how the vehicle behaved in a
mission. For the majority of operations that transpire where environmental data is
recorded, the simple truth is that unanticipated vehicle failure (hardware, software)
16
-
-=-
-,
occurs in some percentage of these missions, thus necessitating active intervention by
vehicle operators. It follows that any tool developed to interface a broad array of vehicles
must be configurable to serve such a purpose.
A likely scenario to increase the utility of a single vehicle would be the incorporation of
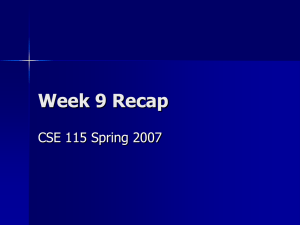
independent users, each promoting their own research, through specified access to the onboard resources. To deal with the issue of longevity, the Webb Research Corporation has
developed the first oceanic Glider, Slocum [Simonetti 98]. Slocum (figure 1.2) uses an
environmentally driven engine to overcome caveats introduced by limited battery life and
is a representation of the VIP paradigm for continued access by many users over a longduration deployment. The utility of AOSN lies in having the system automatically
reconfigure and organize itself based on the participants [Turner 96], but this is a feature
that has yet to be successfully employed at outposts like LEO 15 [Forrester 93] or in AUV
related experiments [Schmidt 96, Beaufort 1,2]
Figure 1.2: Slocum is an AUV designedfor long duration deployment
Furthermore, addressing the organizational potential of an operator has yet to be
determined or evaluated, as scarce tools exists that bundle access to the vehicle and its
data taken from previous missions in a common execution environment. A user is
17
expected to have their own copy of the appropriate information about the vehicle's
performance history (like sampling rate or past mission objectives), and this is a
bottleneck for introducing more than one user to operate and successfully conduct
research with or in a network of vehicles. It is possible for researchers to share this
information outside of the specter of actively controlling the vehicle by placing the
information in a common location that is available to all interested parties. The problem
then becomes how the data should be stored and whether there is an appropriate means of
searching the data. Here, the ocean community would benefit greatly from a welldefined schema to represent information taken from a vehicle as well as a means of doing
data visualization.
It is very desirable to be able to actively control a vehicle or its subsystems by taking
consistent and coordinated measurements to provide for the temporal and spatial
resolution of data sets necessary for worthwhile interpretation of ocean phenomena
[Schmitt 96]. While the artificial intelligence used by vehicles to perform missions has
improved, it is by no means a match to an operator issuing commands to fulfill a mission
objective [Kim 97]. An experienced operator is currently a requirement in the loop of
making an AUV behave in an intelligent manner, as difficulties inherent in
communicating underwater have precluded the implementation of truly autonomous
networks that perform adaptive sampling [Catipovic 90]. Experiments that have posed
questions about the parameters involved in doing Remote Monitoring [Kim 97, Kim 96]
have used application and hardware-specific software. Work on generalized
implementations of Remotely Interfacing a vehicle is being conducted [AUSI, MOOS].
18
Although the design and construction of AUVs varies in accordance with different
criteria, some sort of communication requirements is invariably set, and this is where my
research builds on new models for interfacing the vehicle. Advancements in the areas of
Radio Telemetry and Satellite communications have influenced how the engineer creates
a communication link with the vehicle. In addition to "jacking in" with a tether, Radio
Frequency modems are being utilized (MIT's Odyssey, MBARI's Dorado, WRC's
Slocum). These modems have line of sight ranges up to 20nm [Freewave] thus allowing
for realistic coastal zone observation swaths from a fixed location on land. Currently,
there are no software tools to address this problem of on-the-fly Remote Interaction with
a vehicle sampling in the water column, as differences in design and construction of a
vehicle often lead to proprietary communications solutions.
The question becomes how to set up a system to monitor a vehicle, potentially by many
users. A well-defined, maintainable operating structure is necessary to support such a
system of users. A distributed computing framework, where there might be several
machines on a network that are hosting vehicles and need to transmit their information to
one or multiple users, is at the core of the answer to the question. The system protocol
should be based on adaptable software tools.
1.3 Web Space
It is important to recognize the advent of the World Wide Web as an extremely useful
means for allowing information to be shared in a graphical and intuitive manner among
users. At its core, the Web is a static hypertext graph representation of data. Servers
present this information to clients requesting the content of a page in a Web browser; the
19
Web has developed into the dominating platform for information systems on the Internet
[Ciancarini 97]. Academia and business has embraced the Web for disseminating
information. MIT's Open Course Ware' initiative is designed to make all of the
Institute's courses available online within ten years. Numerous labs and electronic
journals now exist. Society has entered into the third wave: the age of instant access to
information, bolstered by this powerful medium for content delivery.
The push towards a more dynamic space, with an increasing availability of networked,
Web-accessible workstations, has begun. It has become more desirable to use the Web
for dynamic, distributed applications. As an example of means of making the content
dynamic include running scripts, or presenting the client an Applet. Common Gateway
Interface (CGI) or Perl scripts are examples of executable programs that run on the server
and can interpret certain user actions and respond appropriately. An Applet is an object
written in the Java programming language that acts like a program running in the client's
browser, under control of the browser's Java Virtual Machine.
The Web is a natural choice for means of presenting remotely-located users with an
interface to distributed applications. Coupling the interface design with server side
resources has increased the utility of dynamic content presentation. Projects that provide
the user with an interface to Manage distributed sub-systems like Poseidon [Poseidon],
Thetis [Thetis], or ARION [Arion] are models for how researchers can interact with
information, perform useful calculations and then produce data products for interrogation.
The goal of these tools is to capitalize on the diversity of resources that may be presented
I http://web.mit.edu/newsoffice/nr/2001/ocw-facts.html
20
to the user via distributed network coverage thereby giving the individual investigator a
new means of examining their problem.
21
Chapter 2
Remote Interaction Planning and Visualization
2.1 Problem Statement
It has been several years since the concepts for the AOSN network were proposed, and
incremental developments (Haro Strait2 , Labrador Sea , Buzzards Bay4 , Arctic Ice5 ) have
fostered the growth of the idea. Advances in the computational resources, underwater
acoustic telemetry, and methodologies for organization and localization of multiple
AUVs have laid the foundation for the framework that will someday be in place for a
real-time oceanographic sampling network that assists in climatologic forecasting and is a
test-bed for future incarnations of ocean monitoring.
The crux of the system relies on robots, which are limited by their sensor suite; a robot's
ability to perceive their environment and act intelligently is a function of its sensors. The
key observation here is that by in large robots are still only as capable as the operator
who has planned their mission, if that. Certainly forages into behavior based hierarchical
layered control [Bellingham 91, Brooks 99] have furthered the state of the art, but are not
in the clear when it comes to having an autonomous robot make well-informed decisions
Schmidt 96
2
' Visbeck 94
4Kim 96
5Bellingham
95
22
about what it should do next. This particular job is accounted for in the AOSN
architecture after the vehicle has uploaded its data sets to shore via some telemetry link.
The shore node (i.e. a human operator) relays new instruction sets to the vehicle based on
having interpreted the data and decided on a new plan of action. This begs the question
of how informed the shore node is, in particular the scientist monitoring the vehicle, for
making the vehicle's next set of decisions that comprise a mission. The goal is, of
course, to produce robots that make intelligent conjectures about their behavior plan
based on the data it is sampling thereby removing the human from the control loop
entirely. Without a robust means of perception, the robot is at the mercy of the coarse
resolution of its sensors for decision-making within its environment. This issue
motivates the need for visualization of data sets to improve upon mission objectives.
And finally, by noting that these vehicles have limited memory, at best limited intelligent
decisions without assistance about what to do when a mission has terminated can be
expected for the time being.
If well-formulated hypotheses about the data that has been collected are encapsulated and
executed as missions, the utility of a vehicle in the network has increased, for instance,
through conservation of energy; vehicle resources are not wasted on observing
insignificant phenomena. The problem really lies in how such well-formulated decisions
get proposed and then executed. Do multiple copies of the data sets exist and if so, how
easy is it to disseminate this information to other scientists for their input? All
researchers involved would benefit from a definitive way to store the extracted
environmental data so queries on the data sets return useful results. An iterative approach
to optimizing a vehicle's mission plan and better understanding of the ocean parameters it
is observing is the goal. As for the execution aspect, what provisions are made for
23
researchers that have an interest in the mission parameters of a vehicle, but are not
physically located at the shore node?
Thus, another problem addressed by this thesis has to do with interfacing a collection of
resources. For the purpose of this work, the term data device (or simply device), and
resource will be used interchangeably to mean an instrument that has useful information
or data that we wish to access. Examples of such devices are: robotic underwater
vehicles, computer workstations or databases. Therefore, the questions outlined above
include representation of resources, application specific protocols, and underlying control
architecture to support a means of facilitating data extraction. From a utility standpoint,
the important issues include: a means of presenting the device's information to the user,
giving them the ability to interact with and then evaluate the data they have retrieved.
To better define the approach taken to render the RIPV solution to the aforementioned
problems, four specific areas were examined. First, we will look at Vehicles and their
design to gain insight into what common features will make the RIPV applicable.
Second, the general problem of multiple Users accessing resources concurrently will be
addressed. Third, Data Management is discussed, as this is of interest for researchers
extracting information from a vehicle. And fourth, the problems associated with a
heterogeneous computing environment are examined.
24
2.1.1 Vehicle Management
Two key aspects of managing multiple robots operating in an environment that you do
not have specific control over are: who is available to communicate with and how do I
pass information to that object. It is often desirable to make these decisions a prioriin
order to guarantee that VIPs in the network will be able to receive commands, and are
uniquely identifiable. Who is available on a network is more a task for the operator in
situations where they exhibit some form of control over the behavior of the network,
however consideration should be given to scenarios where a previously unidentified node
registers on the vehicle network to receive commands [Turner 96].
The type of telemetry hardware configuration that will be utilized is an essential part in
determining how access to a platform is established. This obviously leads to limitations
in how you can deploy your network, as changes made at the hardware level must be
reflected in the configuration of all vehicles that you wish to have access to. A way to
expedite the solution to the problem is at the conceptual level make the software capable
of handling a multitude of connection channels, like the ability to interface a vehicle with
TCP/IP (via Sockets and an Ethernet cable) as well as serially (with a serial
communications cable). Thus, hardware overhead becomes less of a concern for
maintaining semblance in future implementations of a vehicle.
Robots inherently use some sort of processor for running the control software, and at a
high level, the communications command structure that an operator has access to is a
function of the underlying operating system. Commands that work in a PicoDos shell
may not be valid in a PC/l 04 running the QNX4 environment. But at a low level, the
25
problem is reduced to sending bytes, or voltages, across an 11O pin that are interpreted by
the microcontroller itself and an action ensues if the appropriate command is given. For
instance, to get a listing of the files in a directory in PicoDos, a user inputs the characters
'dir'. Similarly, 'Is' accomplishes the same goal in QNX.
Whatever the means used to read or write bytes to the I/O pins, there are certain
procedures that need to be followed, and a protocol is defined in terms of what types of
logic levels (at the physical layer) will be used (i.e. RS-232, RS-485, TTL) and how the
bits that comprise the bytes will be put on the pin (i.e. in a Serial fashion, one bit
following the next, or in a Parallel fashion, where several bits are placed on adjacent pins
and then read simultaneously). RS-232 is used extensively for communication between
computers and terminals at standardized data rates ranging from 110 to 921600 bits per
second [Horowitz 98]. The most common port used to connect the computer and
terminal for RS-232 communications is called a serialport,in reference to how the bytes
appear on the Transmit (TX) and Receive (RX) pins.
Choosing how to interface the microprocessor onboard a vehicle stems from the type of
flexibility on-shore or in the water that you desire. Whether you build a tether or use a
modem, the options for sending and receiving bytes to the majority of microprocessors
capable of controlling an underwater vehicle is in a serial fashion with the RS-232
protocol. Used in virtually all microprocessor systems and larger systems as well lends
credence to the prevalence of RS-232, even some 30 years after being published as a
standard by the EIA [Nichols 82].
26
2.1.2 User Management
By removing the user from operating a vehicle within close proximity and introducing
vehicles into a multiple user environment, you must be prepared to deal with concurrent
access to the resources on a user-by-user basis. Severe complications will result if
commands are intercepted before their completion or if there is no way of determining if
a command was received. File transfer protocols like XMODEM or packet transfer
protocols like TCP/IP have a well-defined set of procedures that take place on the Sender
and Receiver in order to guarantee continuity [Hughes 99, Comer 96].
The issue of dealing with the users and determining how to handle their requests to fulfill
mission requirements is considered part of Task Level Organization(TLO). A myriad of
possibilities exist for implementing TLO; a common solution is based on simple
hierarchical TLOs [Turner 96].
Scheduling the user's requests is also an area where details can become increasingly
complex. Task scheduling is usually characterized in many applications as being NP
hard, however the complexity arises in the model for determining when to execute tasks.
For situations where temporal constraints are relaxed, and only a logical precedence is a
factor, there exists solutions to the problem that are not computationally intensive and
retain the intention of the user [Jones 98].
Keeping track of the connections held by a user is best delegated to individual processes.
Users exhibit different behavior patterns when accessing resources, and thus it is
desirable to act based on their actions as opposed to anticipating or setting guidelines on
27
how you expect their behavior to be. When a user's task is being executed, it is
important that other parts of the system do not overstep their bounds and interfere with
the current process. Inter-process communication is therefore needed.
2.1.3 Data Management
Information stored in a network is valuable when it can be ascertained and evaluated.
One of the arguments for using AUV's to collect data for research is that they are cost
effective and make obsolete large reconnaissance platforms. But as you trade down in
size for economics [Bellingham 94], you present yourself with less room to store the
information that sensors are gathering. Hard drive disks are a source of heat (which can
degrade electrical performance, create noise, etc), and as a result, flash cards are an
option for autonomous vehicle designers with capacities that currently only provide in the
low hundreds of Mega Bytes MB [Persistor, Onset]. Contrast this with the upper end of
high-resolution sensors, like sonar imaging hardware, which can often produce MB of
data in a matter of minutes and you are invariably strapped for storage space.
Compensation can take place in the form of reduced sampling rates, altering of mission
plans, periodic offloading of data at specified nodes or surfacing and telemetering via
modem or satellite. The first two options listed are often unwanted solutions; the last two
are feasible, the latter of which is more flexible.
Data is generally stored in a File format for ease of packaging, transfer, and execution of
code, but streaming data or packets are also acceptable means of sending information.
For the purposes of AUV research, executable binary code and vehicle logs are stored as
files. This way, vehicle information can be ascertained by parsing the log, and new
28
control software can be downloaded with file transfer protocols that are inherent in the
vehicle O/S. For instance, when the controlling software for the Odyssey Ib and Slocum
is initiated for a new mission, the code first reads from an updateable ASCII
configuration file to learn the value of new mission parameters, if any.
Important to the user is the ability to extract the data files generated, interpret logs,
update the software on the vehicle, send commands back to the vehicle about what type
of behavior is desired. This requires that a means of transporting a file to/from the
vehicle is present. For a user to be effective, they must be able to interpret the results in
some fashion. Their options then include either some sort of parsing the data files for
inspection, formatting the data for output to a model or prediction system (like HOPS6),
performing a visualization using a software tool, or storing the file itself for perusal at a
later time. Retrieving the information stored can be challenging, especially without welldefined directory structures or Metadata about the contents of the files that you are trying
to recover. For an implementation of a web accessible ontology Metadata creator for the
Poseidon DISOP, see [Wariyapola 99].
A Database Management System (DBMS) provides an interface to the tools for storing
and algorithms necessary for comprehensive searches on data. A simple and logical view
of a database system is the relational data model in which the user perceives the data to
be organized in tabular form [Elmasri 94]. As a result, relational databases (RDBMS) are
being used overwhelmingly in industry today [Sunderraman 99]. The relational data
model has a strong foundation based on set theory where each attribute name is
6
Harvard Ocean Prediction System
29
associated with a domain, or set of values. The Structured Query Language (SQL) is a
universal language that can be used to define, query, update, and manage a relational
database [SQL].
2.1.4 Heterogeneous Computing Environments
The extreme heterogeneity of dispersed computational resources poses an additional
problem in terms of the compatibility and translation between processors, operating
systems, implementation languages, data formats, etc [Patrikalakis 99]. Establishing a
static architecture for interaction fails to provide ease of access for future components
that might be introduced to add functionality to the system. There is greater overhead for
the developer of the system when having to interface inconsistent parts, too.
A functional requirement that is becoming increasingly prevalent in the design of webbased systems (for instance, Visualization Systems) is not downloading system specific
software to a user's machine for execution. In essence, the client part of the system has
to be independent of the client's computer platform [Bender 00]. Technologies that can
overcome deficits imposed by different operating systems interacting in a network
include the programming language Java or the CORBA standard, both of which are
described in more detail in chapter 3.
2.2 The RIPV Approach
The approach taken to handle the problems outlined in section 2.1 can be summarized as
follows: create an adaptable, teleoperationsoftware system via the Web by incorporating
a distributedcomputingframework to facilitate extraction of vehicle datafor
30
communication, visualization andstorage. This is known as the Remote Interaction
Planningand Visualization (RIPV) system and is the core software contribution of this
thesis research. In the context of the ocean sciences, the RIPV can be categorized as a
Distributed Information System for Ocean Processes (DISOP), as it satisfies four
criterion exactly by: making transmission transparent, uses distributed computational
resources, improves data reduction and interpretation, and increases the potential for
autonomous operations [Patrikalakis 99]. For a description of other projects that use
distributed applications, see [ARION, Poseidon, Thetis, Robinson 00, Bender 00].
2.2.1 Distributed Computing
Distributed computing solutions are commonplace today and are used to accommodate a
wide variety of user needs and applications. Distributed Data Processing (DDP) is
defined according to [Black 87]:
" In contrast to the conventional single, centralized site, processing is organized
around multiple processing elements (PEs). A PE is a computer or other device
capable of performing automated, intelligent functions.
" PEs are organized on a functional or geographic basis.
" Distributed elements cooperate in the support of user requirements.
" Connection of processing elements is through common carriers or private links.
" It entails the dispersion of hardware and/or software and/or data.
Arguments for implementing such a system include:
*
Generalization of a machine concept often leads to overkill in designing a
solution.
31
*
Specialized machines can perform fewer functions, but perform them very well.
" Allow users and developers to gain some control of the computing power in the
organization of a system.
Disadvantages of such a system should not be overlooked:
*
Loss of control leads to emergence of multiple standards within the organization
" Duplication of software resources might lead to conflicts in implementation
" Incompatibilities associated with introducing different versions of the software
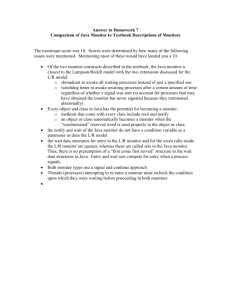
There are several ways that DDP can be implemented:
ABC
Replicated
Partitioned
Centralized
A
BC
ABC
ABC
Figure 2.1: Ways to implement DDP
As seen in Figure 2.1, the three basic types of a data distribution are Centralized,
Partitioned,and Replicated. The RIPV tool supports Centralized and Replicated versions
of the DDP. A Centralized approach seemingly defeats the purpose of introducing a
distributed framework, but allows for ease of use and provides the user with the ability to
launch the software package from their own server. The Replicated configuration is how
the RIPV system best utilizes remote resources and takes full advantage of remote
method invocation (RMI), to be discussed in section 3.4.
32
The RIP V tool set makes use of independent Service modules that perform as distributed
PEs over a network that is accessible via the TCP/IP protocol. In addition to the
Disadvantages listed above, the problems associated with accessing the same resource
can lead to a situation where a user is accessing content while another user has a handle
to the same reference. To prevent this failure mode, the RIPV tool supports a simple
procedure known as lockout. Lockout prevents two users sharing the same resource from
interfering with one another by means of inter-process communications designed so that
only one user at a time can access variables. An overview of the system is given in
section 4.1.
2.2.2 Adaptability
Crucial to the observation that changing computing environments often wreak havoc on
software implementations that are forwardcompatible, the RIPV is a framework that
promotes "code reuse and incremental development through object-oriented extensions
for the programmer" [Lalis 00]. By virtue of the fact that the code is written in an Object
Oriented Programming language, Java, a developer wishing to improve the system will
be capable of doing so after understanding the layout and class relationships. This is
explained further in section 3.1. Also, the code has a searchable Application
Programming Interface (API) located at http://deslab.mit.edu/-rdamus/ripv api to allow
for easy reference of relevant classes for either adding to the system or designing new
parts to be included in the current version.
2.2.3 Accessibility
There are three fundamental ways to access and/or implement the RJPV software:
33
"
Solely as a user (or client), known as the RIPVClient
"
Solely as the host of the RIPVServer
" Solely as the provider of an RIPVService
Each one of these ways can be coupled with the other to produce a total of 7
combinations for how the software can be run. For instance, you might want to host the
RIPVServer, but also access the system as a client, or you may offer a service to the
system and want to access the system to take advantage of other Services running
remotely on the network. Or you may be the host and also act as a provider. The 7
possibilities stem from having 3 options for atomic pieces of the system and you could
have any combination of them and any number of them on the same machine:
Zi=7
2.2.3.1 Accessing as a User
Accessing the functionality provided by the Replicated, or most likely method of
accessing the RIPV system, the user must simply have:
*
An internet connection
*
Web Browser
Keeping with the model that no software should run on the client's machine, the
Graphical User Interface (GUI) for the RIPV tool is presented in a user's Web browser.
To run the software, you must be using a Java-compatible browser that runs the Java
Plug-In verl.2 or higher (latest release is plug in 1.3)7 include:
7http://java.sun.com/products/plugin/
34
" Netscape Navigator8 version 4.08 and higher
*
Internet Explorer version 59 and higher
*
Hot Java enabled Browsers
2.2.3.2 Being the Host
The software is launched as the server from a machine that supports:
*
A Web Server
*
Internet Connection
*
Java Virtual Machine
2.2.3.3 Being a Service
In order to provide a service to the system, you must have:
*
An Internet connection
" Java Virtual Machine
2.2.3.4 Example of Being the Host, a Service, and a Client
If the user wishes to exercise the CentralizedDDP option by running the whole RIPV
system on a single machine, thereby essentially acting like the host machine, and a
provider, but also being able to retain the functionality that a client sees then the
prerequisites are:
8
http://home.netscape.com
9 http://www.microsoft.com/windows/ie/default.htm
35
.
An Internet Connection
o JVM
*
A Web Server
o JVM
*
A Web Browser
o
JVM
36
Chapter 3
High Level Programming Methods
3.1 Object Oriented Programming
As a practical and adaptable means of solving the problems addressed in this thesis, the
software paradigm chosen to express the constructs and organizations is of an objectoriented flavor. This means that specific objects, or classes as they are called in Java, can
be defined by code and then given attributes and functionality in the form of variables
and methods, respectively. The convoluted nature of this problem lends itself nicely to
this abstraction methodology, where classes can inherit, or extend characteristics from
other classes in order to group the problem into manageable chunks that can be dealt with
in a predictable and easy to improve upon manner.
3.2 Java
Java is a trademark of Sun Microsystems, who describe Java as a "simple, objectoriented, distributed, interpreted, robust, secure, architecture neutral, portable, high
performance, multithreaded and dynamic language." 10 Java is based on the C++
programming language, but can also be used to create executable content that can be
distributed through networks. It is a relatively young language [Mihanetzis 99] and this
version of software was written in what is now being called the Java 2 platform, using the
Standard Development Kit . Java is different from other software systems in that it's a
software-only platform that runs on top of other, hardware based platforms [Campione
1
http://java.sun.com
"http://java.sun.com/j2se/
37
99]. It is both a programming language and a platform. Java code is first compiled and
turned into bytecodes, or platform independent instruction codes, and then run on an
interpreter. The two major components of the Java language are:
" The Java Virtual Machine (JVM) interprets bytecodes. Each java bytecode
instruction is interpreted every time the program is run on a computer.
" The Java Application Programming Interface (API) which is a collection of
ready-made software components that are grouped in libraries, orpackages.
When choosing a programming language to design a software system, it is important to
consider the scope of the problem and whether performance issues will be of concern.
With Java the type of operating loads expected for computationally intensive applications
might degrade performance, however for the RIPV problem statement, Java will perform
just fine [Boszormenyi 99]. See Figure 3.1 for more detail about the decisions affecting
the programming language. Fortran was not considered for this application.
Product
Platform
Type
Remote
Web
Methods
Interface
Portability
JAVA
Independent
OOP
RMI
CORBA
JNI
Applet,
dynamic
Easy
C++
Dependent
OOP
RPC
CORBA
CGI,
static
Difficult
C
Difficult
CGI,
static
Figure 3.1: Considerationsin programminglanguage choicefor RIPV
Dependent
N/A
Serial
3.3 Distributed Objects
By distributed objects, we are referring to objects that reside is separate address spaces
and whose methods can be subject to remote method calls (a remote method call is issued
in an address space separate from the address space where the target object resides)
38
[Plasil 98]. Convention has deemed the code issuing the call as the client (cf with the
client from the client-server architecture described in chapter 4); the target object is
referred to as the server (hence the suffix naming convention for RIPVServices, see
Appendix A) or simply the remote object. One of the keys of this framework is making it
transparent to the user how "far" away a remote resource actually is: perhaps they reside
on the same machine, are on different nodes of a network, or even different URLs.
Implicit in delivering a remote method call over a network communication infrastructure
is the request (asking the service) and response (bringing results back to the client).
To help programmers design and understand client-server interaction, researchers have
devised a conceptual framework for building distributed programs known as the remote
procedure call model or RPC model [Comer 96]. This model hinges on an applicationoriented design where a solution to the problem is crafted as a single program entity and
then divided at the procedural level and distributed among a group of computers to run
the code. This ensures that the program can solve the problem, and does not bog the
designer down with concerns about the communication aspects of the code. A
conventional program in this fashion consists of one or more procedures, usually
arranged in a hierarchy of calls. Below is an example taken from [Comer 96].
computer,
proc3
main
computer 2
procgmpred
FProc
proc5
Figure 3.2: Distributedprogram using remote procedureparadigm
39
3.4 Remote Method Invocation
Remote Method Invocation (RMI) is the pure Java way of dealing with distributed
objects. Java also makes provisions for employing the CORBA IIOP protocol [Hughes
99, Plasil 98]. RMI is a high-level distributed-object interface to networking. This
means that instead of having to worry about low-level calls to opening sockets and
establishing network connections yourself, an underlying networking infrastructure
handles the networking for you. RMI is used to invoke remote methods on remote
objects as though the methods were residing locally on the machine being used. It can be
used in client-server type architectures, as well as in a peer-to-peer relationship, thus
blurring the line between server and client. This is useful, for instance, in creating a low
overhead process like an event server where client notification is not continuous.
Currently (and for the near future), RMI can only work on Java enabled machines, thus
limiting its usefulness in implementation for legacy code. The aid of a Java Native
Interface wrapper, which is akin to adding a layer of code on top of existing software,
provides an interface to procedures that already have been written, thus extending the
breadth of RMI's domain in legacy systems.
RMI is a competing technology for developing enterprise related business solutions in a
distributed computing environment and is desirable when invoking a method from a
remote machine makes more sense than having the method reside locally. RMI can be
used to pass objects across a network, the whole purpose of RMI being: allow Java
objects to communicate via their methods regardless of where the applications reside.
RMI allows the passing of behavioralobjects, which implies passing both the object's
state and behavior. An object's behavior is provided by its class file, which is
40
automatically downloaded by the recipient. RMI provides for safety considerations in the
form of an RMISecurityManager.
Competing technologies with RMI are depicted in Figure 3.3. CORBA, the Common
Object Request Broker Architecture, is a highly versatile and powerful architecture for
developing distributed object environments". It has the benefits of being widely
accepted and is gaining momentum, but its complexities due to the general nature of its
organization precluded its use in this project. DCOM, Microsoft's protocol that enables
software components to communicate directly over a network stands for the Distributed
Component Object Model. It is not platform independent and thus was not considered.
Product
Platform
Interface
Language
Transaction
Speed
Portability
RM I
Independent
java.rmi.Remote
Fast
Easy
CORBA
Dependent
IDL
Faster
Depends
DCOM
Difficult
Faster
OLE
Dependent
technologies"
method
Figure 3.3: Competing remote
For a client and server to communicate via remote method calls, the party that will be
accessed remotely must make a collection of these methods, known as an interface (that
extends the RMI super interface,java. rmi.Remote14 ), publicly available. But in order for
the methods in the interface to be called, one must have a local reference to the remote
object whose interface you are accessing the methods of. Typically, a client will be able
)
to establish a remote reference by querying (in Java this is known as doing a lookupo' 5
12
3
The Object Management Group formed to promote the use of CORBA. For more info visit http://www.omg.org
Plasil 98
4 http://java.sun.com/j2se/1.3/docs/api/ava/rmi/Remote.html
" http://java.sun.com/j2se/1.3/docs/api/java/rmi/Naming.html#lookup(java.lang.Sting)
41
on the machine where the remote object resides. The lookup takes place in the registry,
called the rmiregistry, which is a table that keeps track of what remote object have been
bound (via a call to the Naming.bind()6 method when the remote object first is
instantiated by starting its application). A reference to the remote object is returned to the
client as a result of the lookup, and this then allows the client to gainfully employ the
methods defined in the remote object's interface as though this remote object was
actually residing in local memory space.
For the RIPV system, the interface associated with RMI calls between the RIPVServer
and RIPVServices is the GenericRMnterface, which defines three principle methods,
serviceRequesto, serviceReplyo, and register(
)7 (see footnote for the other methods
defined). Implementing a server object's interface is a way of designating that object as
providing the service associated with the methods in the interface. Thus, the
GenericRMlInterface is the set of methods that all services implement and are capable of
providing as a service to the RIPVServer (in this case the RIPVServer is acting as the
client to the RIPVService). Important to note is the RIPVServer exposes the
RIPVServices to the RIPVClients, thus making the RIPVServices function as servers
with respect to the RIPVClients. Another way to think about this is to consider the
RIPVServer as the broker for the system, keeping tabs on services, and then presenting
them to users who want to gain access to what the services offer. However, since the
RIPVServer also implements the GenericRMIlnterface (actually, a separate reference to
16
http://java.sun.com/j2se/1.3/docs/api/java/rmi/Naming.html#bind(java.lang.String, java.rmi.Remote)
17 http://deslab.mit.edu/~rdamus/ripvapi
42
the service, the ServiceReferences that are stored in a Vector residing at the
RIPVServer implement the interface), the RIPVServer is capable of being a service with
respect to the RIPVService, thereby utilizing a feature of remote methods known as
callback [Hughes 99]. Callback is a useful tool for treating both the client and server as
both types of remote objects simultaneously.
Launching a system that uses RMI requires understanding how the request and reply are
handled by the underlying framework. These actions are handled by specific pieces of
code that are generated after compiling, called the Stub and the Skeleton. The stub is
distributed among the clients so that their RMI code can successfully call on the server.
And the server maintains the skeleton, which is responsible for handling the incoming
RMI calls from the client. For actual deployment, the client in this case, the RIPVServer,
wishes to access the services provided by the remote RIPVService objects, and does so
by having a collection of the RIPVService stubs so that it can gain a remote reference via
the lookup in the appropriate rmiregistry. Similarly, when the RIPVService acts as the
client to the RIPVServer by registering itself using the registeromethod, it must have a
RIPVServer stub to guarantee that its RMI calls are marshaled correctly through the
network.
18 http://java.sun.com/j2se/1.3/docs/api/ava/util/Vector.html
19 http://developer.java.sun.com/developer/onlineTraining/rmi/RMI.html#RMIStubsAndSkeletons
43
Chapter 4
The RIPV System
4.1 Overview
The Remote InteractionPlanningand Visualization tool is a client-serverbased software
system designed in the Java programming language that serves up nonstandard20
applicationservices [Comer 96] for the purposes of gaining access to a resource located
remotely with respect to the network hosting the server . As depicted in figure 4.1, the
core components of the system are the RIPVServer, RIPVClient, and RIPVServices. The
system is written for the Java 2 platform
and takes advantage of Remote Method
Invocation (RMI) for interacting with its distributed PEs.
RIPVSERVICES
RIPVCLIENT
GUI
RIPVSERVER L
Figure 4.1: The core components of the RIPV system
Functionality of this DISOP is offered to the RIPVServer in the form of a RIPVService,
which registers itself with the server and by means of a common interface, known as the
GenericRMflnterface. This interface makes a set of methods available that the server is
" Nonstandard implies that the service is not available locally on a universally recognized protocol port identifier.
2'
Services and users may reside locally as well.
44
capable of calling to access the service. The services developed thus far include an
application called the SerialPortServerthat communicates with an ocean vehicle via a
telemetry node by sending data to a serial port, a remotely accessible database called the
DatabaseServer,and an application that can communicate with a visualization program
like Matlab called the DataVisServer. The application communication protocol is based
on message passing between the server, services and clients during a session.
Information passed to the server, called Messages, is dealt with in the subsystem known
as the TaskManager. This Thread 23 delegates responsibility after parsing either the
Header or Footerof a Message that has been passed to it from one of the assistants.
These assistants are each responsible for their own MailBox located in the PostOffice.
No record of a Message is kept on the server hence it is a stateless server with respect to
the client. The server does know that clients have contacted it, however, and also about
the types of RIPVServices that have registered by keeping a ServiceReference that
describes a service completely using a ServiceDescriptor.
A PostOffice delivery system is employed at the RIPVServer and RIPVServices to keep
track of the 4 types of Messages: Incoming and Outgoing ServerMessages or Incoming
and Outgoing ServiceMessages. The names are with respect to the part of the system that
a Message is traveling to (from), so a Message that leaves a service or the server will
always be of type Outgoing and vice versa. The PostOffice is responsible for scanning a
22
The name given to versions of the Java Development Kit (JDK) version 1.2 or higher [http://java.sun.com]
2'
http://java.sun.com/j2se/1.3/docs/api/ava/lang/Thread.html
45
Message and placing it in the appropriate MailBox after distinguishing the type of
Message that has arrived.
MailBoxes are prioritized queues that have 3 separate priority queues for input, called
Inboxes, ranging from least important (priority 1) to most important (priority 3). A
MailBox also has an Outbox that Outgoing Messages are placed in for transport. A
Message consists of a Header and Footer. The Header contains the relevant information
about the origin of a Message as well as the desired command to be executed and a
Footer contains relevant information about where the Message has been.
A user that wishes to access the services provided by the server will download the
RIPVClient applet from the server's location and get a listing of the services available by
successfully logging on to the GUI presented by the applet. The client is then capable of
querying the services to perform tasks. To illustrate the power and flexibility of the RIPV
system, consider the following hypothetical situation:
At MIT, in the Ocean Engineering Department, a graduate student powers
up the Design Lab's Silicon Graphics Workstation Web server,
deslab.mit.edu, and starts the rmiregistry (Appendix E) and sets the user
permissions in the permit file before launching the RIPVServer on port
4444. Meanwhile, a collection of Gliders is sampling off the coast of
Bermuda and has been configured to use Freewave modems; each Glider
has a unique identification (either a serial number or name mapped to the
serial number) and the modems are connected to the serial ports of an onshore PC that is running the Windows 98 operating system. The
researcher in charge of this site does a one-time installation of the Java
Runtime Environment (JRE) on the PC and then launches the executable
RIPVService (called the SerialPortServer) from the JAR file that has been
sent to him as part of the software package included in the Glider Mission
Control.
At the Webb Research Corporation in Falmouth, Massachusetts, an
engineer has finished updating the SQL database that resides on a
Windows NT box with the latest information about the gliders operating in
Bermuda, and he then launches the DatabaseServer. And finally in
46
California, a technician at MBARI initiates his version of Matlab on a
Linux machine and then launches the DataVisServer with the appropriate
permissions. After this initial setup, the research team in Greece that is
responsible for the Gliders in Bermuda accesses the homepage of the
Their
RIPVServer, located at http://deslab.mit.edu/~rdamus/ripv.
Netscape browser spawns the RIPVClient applet, gets a listing of the
available services from the RIPVServer. The first thing they do is upload
their new binary executable control code to the RIPVServer, and query the
Server for a listing of files to ensure that the file was properly transmitted.
Then they successfully perform command line interfacing to the gliders,
getting a directory reading of the CF1 microprocessor on board, and
offload the mission logs with a reliable YMODEM transfer. Interested in
the contents of these files, they ftp the files from the server to their own
machine and parse the files with their own scripts. By querying the
database for recent activity, they learn that 3 of the 4 gliders have not fully
performed their mission objectives and thus they proceed with updating
the mission parameters ASCII file and send the GO command that causes
the gliders to submerge and continue. The glider that has finished its
missions has returned a hefty data file that is parsed and then sent back to
the RIPVServer as a 3-dimensional data set, and the DataVisServer is
contacted for action. Within moments a JPEG file is returned to their
RIPVClient GUI and they mull over the results, decide on a new mission
for the last glider, and upload yet another binary executable to the
RIPVServer. Final preparation is made with an upload of this executable
binary file from the RIPVServer to the last glider and then the GO
command is given. During this time, a team of scientists at URI has
queried the same set of gliders and offloaded the same data files, but
cannot configure the glider for a new mission because of lack of the
appropriate permissions.
4.1.1 The RIPVServer
The RIP VServer is a multi-threadedserver that listens for TCP/IP Socket connections
from the client on a specified port, 4444. By virtue of extending24 the
java.rmi.server.UnicastRemoteObject2 5 class, the RIPVServer is also considered a
Remote Object, meaning that it has the ability to make Remote Method calls to the
RIPVService. Upon initiation, the server spawns a ServerSocket Threadthat listens for
clients to connect to the Socket, and then binds that client by first tagging it with an
24
in Java, a child class will extend a parent class to inherit the capabilities of the parent. In C++, this is known as inheriting
47
idBadge and then passing control over to one of its Handlers. A Handler is a Thread that
becomes explicitly responsible for watching all communications over the Socket, thereby
relieving the server of that task, so that it may focus its resources on registering services
that establish a connection through RMI, and supporting the TaskManager's activities.
Thus the main purpose of the RIPVServer is to act as the facilitator of communication
between the client and the services. Figure 4.2 is a conceptual layout of the RIPVServer
and figure 4.3 shows the star network configuration of the RIPVServer and its
RIPVServices.
25
http://java.sun.com/j2se/1.3/docs/api/java/rmi/server/UnicastRemoteObject.html
48
RIFVSever
desIab.mit.edu:4l4
n0
Post
ci
.
-Hi
rn
Fbrke
t2vie~f
SPS
osf
Solaris
WIn32
I
Unwi
L
-------- rTK - Ird
temet<
-- senMeews
rn
Mac
Figure 4.2: RJPVServer conceptual layout
49
Other
-
-
~mr.
~-~-~-~-----
--
-
-.
KEY
SRIPVServer
0 RIPVServices
7
Figure 4.3: RIPV star network configuration
4.1.2 The RIPVClient
The client program, which is an extension of thejavax.swing.JApplet2 6 class, presents the
GUI to the user after being loaded in a web browser as shown in Figure 4.4 (section
2.2.3.1). The set of Java classes available in JApplet is based on Lightweight
components that allow the development and drawing of modem GUI controls (section
4.2) [Horstmann 99]. The primary justification for the client program being an applet is
to avoid loading resources into the memory of the client's machine, thus allowing the
freedom that the client be located anywhere in the world and still have access to the
functionality provided for by services. For instance, remotely communicating with a
Glider that has surfaced and needs a new command set is now possible without the
operator having to be within close physical proximity of the location where the vehicle is
sampling and telemetering data to.
Since an applet is a foreign program running within the runtime environment of the
browser, Java has made its ability to access system level resources on the client machine
almost impossible. A way around this problem is by incorporating the client-server
26
http://java.sun.com/j2se/1.3/docs/api/avax/swing/JApplet.html
50
architecture that the RIPV employs. To specifically address the issue of providing a
means for the user to upload files to the RIPVServer for distribution to services, a CGI
script (see Appendix D) is presented in a window adjacent to where the applet resides in
the browser (see figure 4.4). The user could always useftp or a similar mechanism to
upload the file, but included in the RIPV distribution is this useful CGI script to assist in
uploading files.
51
Figure4.4: RIPVClient layout with CGI uploadin Web browser
52
The RIPVClient first establishes a Socket connection to the RIPVServer from the web
browser, and instantiates a ClientSocketHandlerthat becomes responsible for ferrying
data from the GUI by listening to an ObjectStream". This abstraction layer is very
powerful and does not restrict the data type being passed between the client and server
[Hughes 99]. It is suitable for presenting the RIPVServer with instances of a Message, a
subclass of an Object2. In order to determine what actions should be taken based on
receiving a Message, a mapping is used based on the serviceID tag in a Footer of a
returned Message. This map is discussed further in Appendix B.
The Java language provides Listeners (associated with components that make up the
GUI) that pay attention to user actions like mouse-clicks or button-presses. In the Java
Event Model, an ActionEvent is a semantic event, which indicates that a componentdefined action occurred [Java SUN]. Therefore the RIPVClient has several
ActionListeners that respond accordingly by calling methods associated with the
GuiInterface to update the GUI. The GuiManageris the overseer of the RIPVClient's
GUI, and is capable of updating components with results from the RIPVServer.
Clients are given unique identification numbers by the RIPVServer in order to keep track
of the origin of a Message so that it returns to the proper recipient. A description of
identifying the clients is presented in Appendix A.
" http://java.sun.com/j2se/1.3/docs/api/java/io/OutputStream.html
28
http://java.sun.com/j2se/1.3/docs/api/ava/lang/Object.html
53
4.1.3 RIPVClient's Graphical User Interface layout
This section outlines how the GUI is arranged. The Abstract Window Toolkit (AWT)29
is Java's library of classes that contains a number of common graphical widgets
[Campione 99]. To lay out a GUI in Java, you place Components
(java. awt. Component3 , the superclass of the AWT) in ajava.awt. Container. Typically,
common base components like the javax.swing.JPane32 are added to containers with a
layout manager to create the desired interface characteristics. As previously stated, the
RIPVClient uses the javax.swing package of components for GUI presentation.
The RIPV system is designed to be a dynamic interface to a changing set of services.
Over the course of a session, there are a variety of scenarios that will represent the state
of the system. RIPVServices might perish, or new services will introduce themselves and
register with the RIPVServer with a varying degree of frequency; furthermore new
services might be coded and introduced by a new service provider. There are two
immediate consequences to this unpredictable behavior: the RIPVClient must have a GUI
that can handle this periodic updating and removal of services, and the GUI architecture
itself must be capable of providing the developer with a framework to introduce new
RIPVServices.
29
http://developerjava.sun.com/developer/onlineTraining/awt/contents.html#AWTrntroduction
0
' http://java.sun.com/j2se/1.3/docs/api/java/awt/Component.html
I
http://java.sun.com/j2se/1.3/docs/api/java/awt/Container.html
32
http://java.sun.com/j2se/1.3/docs/api/avax/swing/JPanel.html
54
33
nicely solves the issue of
The graphical widget known as the javax.swing.JTabbedPane
keeping track of a set of components. It allows successive components to be added to the
root of the tabbed pane as panels. Each panel is given a tab that protrudes out and can be
selected by the user to bring a particular tab to the forefront of a set of tabs thereby
exposing the panel associated with the tab. The tab serves as a means of labeling the
newly added component. This is akin to adding a card to a Rolodex and then thumbing
through the cards to change the card you are observing.
Tabbed Pane
COM
MAM
DAB,
FIM
DAV
Figure 4.5: The ServiceLayoutPaneland the four JPanelsthat comprise it
The user interface must reflect the capabilities of the services, thus an important feature
the RIPV system provides is a level of organizing content for the GUI. This framework
allows for relatively easy introduction of services to the GUI and is quite modular in how
to approach extending the functionality of the GUI to represent what a new RIPVService
is capable of. The functions performed by each RIPVService are captured in the
collection of ServiceLayoutPanelsthat are added to the tabbed pane. These specific
panels differ in their presentation, but are implemented in a similar fashion to encourage
the development of new services. Each ServiceLayoutPanel is actually a JPanel divided
33
http://java.sun.com/j2se/1.3/docs/api/javax/swing/JTabbedPane.html
55
into four quadrants (figure 4.5) that utilizes a GridbagLayoutmanager to arrange the
contents of the three core panels that comprise it, the COmunications Management panel
(COM panel), the FIle Management panel (FIM panel) and the MAilbox Management
(MAM panel). The fourth panel is based on what service the ServiceLayoutPanel is
responsible for. Currently, the DAtaBase (DAB panel) and DAta Visualization (DAV
panel) occupies the fourth panel.
4.1.3.1 The COM Panel
The MailBox address of the
DatabaseServer's connection
to the database.
Status Labels:
Talking To [TT]
Last Action[LA]
Priority
Service Status[SS]
SIf1
The last command sent was
a query that selected all of
the data from the MISSION
table.
he query was a
Priority message, but
not an Urgent one.
Database replied
Reply Area [RA]
All of this activity took
place because the user knew
the DatabaseServer was
active and ready
Figure4.6: The COM Panel
The COmmunications Management panel is the main area in the GUI for performing
command line interfacing of an RIPVService's resource. It is always included in the GUI
and spans both rows of the ServiceLayoutPanel for the SerialPortServer to allow for more
room in the reply area. Figure 4.6 outlines the important parts of this panel.
56
4.1.3.2 The MAM Panel
Messages are passed to MailBoxes that reside on RIPVServices, thus necessitating a
means of selecting an appropriate MailBox for sending commands to. The MAilbox
Management panel provides this tool in the form of ajavax.swing.JTree3 4 interface.
Figure 4.7 depicts the MAM panel.
Figure 4.7: The MAM Panel
*" http://java.sun.com/j2se/1.3/docs/api/avax/swing/JTree.html
57
4.1.3.3 The FIM Panel
Buttons to check the
Uploaded [UL] or
Downloaded [DL] files
I
I
Figure4.8: The FIM Panel
Keeping track of the files that have been uploaded from the client's machine or that have
been downloaded from an RIPVService is relegated to the FIle Management panel. Two
buttons allow the user to either scan the contents of the upload or the download
directories that are specific to the RIPVServer. See Appendix E for how to set the
directories (including permissions on the directory) that the FIM panel has access to.
Figure 4.8 outlines the FIM panel.
58
4.1.4 The RIPVServices
The three core services each perform a basic function to extend the capabilities of a
vehicle operator. Therefore, the SerialPortServer provides access to a serial port, the
DatabaseServer to a database, and the DataVisServer to some type of data visualization.
A RIPVService, like the RIPVServer, extends the java.rmi.UnicastRemoteObject class
for RMI capabilities and can therefore be accessed like a remote object on the network
after registering with the RIPVServer and passing a reference of itself (specifically, a
reference of its interface) to the RIPVServer's ServiceReference. The data channel that
the RIPVService employs for communicating with its underlying resource can either be
based on the dynamic Handler archetype or a static connection that is established with
some user-defined code. Since a Handler is a process that manages itself, the
RIPVService is capable of managing multiple independent connections. Examples of
dynamic resource allocation:
" A reference to a serial port
" Multiple connections to different databases
" Interfacing a Socket
Static connections include:
*
Connecting to a SQL database (specific driver for the DBMS you wish to access)
" Writing to a file to pass data to another process
A naming convention for a RIPVService is outlined in appendix A.
After determining what resources the RIPVService has a handle on, MailBoxes are
created in the PostOffice that correspond to the particular handle. It is a reference to
these MailBoxes that is passed to the ServiceDescriptor of the RIPVServer. In order to
59
differentiate between services, they are given unique 6 digit identification numbers. This
mapping is described in Appendix B, and takes place in the design and compilation of a
new service. As a result, development of a new service must take place in concert with
the adaptation of the GUI. This is a standard way of developing a distributed information
architecture. It is almost impossible to avoid the coupling of the functionality presented
by a service with the design of the interface to this service (i.e. the GUI). One part of the
system has to know what the other parts can do. Thus, a limitation of this system is that
all services that the system can support must be available in the GUI's layout. This
ensures the ability to interface a service that connects to the system. Services may
register as they please, but coordination with the administrator of the RIPVServer is
necessary if the new service is to function as a part of the RIPV system.
60
4.1.4.1 SerialPortServer
The vast potential of exposing an interface as useful as the serial port to interaction by a
remote user is harnessed in this service through a combination of RMI's functionality and
thejavax.comm35 package. This package provides the low level methods necessary for
accessing the TX and RX pins of the serial port. Therefore, the SerialPortServer is a fully
functional serial port interface, completely capable of sending data to a Vehicle's
microprocessor and then reading the response using hardware like an RF modem (figure
4.9, figure 4.10).
Mechanical Interface
Point
DB-9 or DB-25 pin
connectors
Figure 4.9: Serialport interfacing using the java.comm package
A SerialPortHandleris spawned for each port that is enumerated and remains associated
with the referenced port indefinitely or until an 1/0 error. What is connected to the serial
port is up to the user. For example, interaction with an AUV or other type of vehicle
requires the serial port being directly connected directly to the communications channel
associated with the onboard microprocessor, like the radio modem link or serial
" http://java.sun.com/products/javacomm/
61
communications tether. To control the rate of data exchange and insure commands are
not sent when the vehicle is not ready to receive them, the SerialPortHandler queries the
Carrier Detect (CD) pin of the serial port and only will communicate when a connection
is established. It is possible that intermittent comms will lead to poor performance,
however this is beyond the scope of this service and typically is handled in the data
transfer protocol of the telemetry hardware. For file transfers, one of the first noncommercial Java implementations of YMODEM protocol is used for uploading and
downloading. This protocol uses a CRC error correction scheme, keeping track of the
current 16-bit CRC value by updating a CRCCCIT16 object.
62
Serial PortServer
Izakynthos.mit.edu
serviceRep
II
serviceRequ -to
z
-Hi
ni
;CI
Post
OfficeI
(m~
" Remote corrmanding
" Multiple vehicles
Sas
Win3
Mac
Linux
Other
Figure4.10 SerialPortServerconceptual layout
63
4.1.4.2 DatabaseServer
This server represents a means of connecting to a RDBMS and executing queries that
pertain to the relevant data schema present in the database. The RIPV defines its own
database schema that can easily be duplicated and extended to capture the relevant
information associated with underwater vehicles. Appendix C shows the generic version.
For perusal by the WRC Glider, the VEHICLE name of the table was changed to
GLIDER. Upon establishing a connection with the database with a Java JDBC36 driver,
the DatabaseServer registers with the RIPVServer and then database queries are executed
and the information returned via RMI calls in the GuiInterface. The information from the
data is displayed in table form in the RIPVClient's GUI by means of a DatabasePanel.
36
Java Database Connectivity, http://java.sun.com/products/jdbc/
64
~w-~
-~-
DatabaseServer
imwros.mit.edu
-
----serviceRep y(;
serviceReque 3t()
z
-Hi
m
Xn
Post
Office
-n
" JDBC
if
- SQL queries
So8is
Wn32
Mac
Unux
Other
Figure4.11: DatabaseServerconceptual layout
65
4.1.4.3 DataVisServer
Matlab was chosen as the visualization toolkit because of the power of its computational
engine and scripting language. The latest version of Matlab, 6.1, allows for easy
interaction with Java classes and methods through its supplied Java Virtual Machine,
however, this port of Matlab did not exist when the RIPV code being laid out for the
DataVisServer was first developed. As a result, the DataVisServer communicates with
the Matlab computing environment in a seemingly awkward, yet straightforward manner
of writing data to and reading data from predefined files. The DVS signals to Matlab that
a new data file should be read and then awaits the completion of the computation that
generates a jpeg file that can then be sent back to the RIPVServer and exported to the
RIPVClient's ImagePanelfor inspection. The only other piece of code that needs to be
running is a .m file, called ripvOut.m (see Appendix D for the code) that is launched in
the Matlab working directory and runs until Matlab is shut down. The DataVisServer
cannot presently wake up a sleeping copy of Matlab.
To achieve maximum flexibility in this design, the data file read by Matlab is
configurable to support different visualization requirements. It is assumed that the clients
will need to do their own processing of and formatting of data that has been downloaded
from a vehicle. Then, the formatted data is stored in a column separated ASCII text file
to support multi dimensional data and uploaded to the RIPVServer after the 'vis:'
command is entered at the Command Line of the COM panel.
66
DataVisServer
poros.mitedu
TMk
serOceRep
servioRequE
Ak
So~ars
WIn32
Mac
Linux
Other
Figure 4.12: DataVisServer conceptual layout
67
4.2 Features
These are the design decisions that make up the RIPV tool:
" DDP framework
" Remote Method Invocation
o Allows for updateable interfaces to remote objects on the network
" Message passing architecture
o PostOffice delivery subsystem that uses first-in-first out (FIFO) queues
for Message storage and retrieval
*
Serial, pre-emptive task execution
*
Priority based queues
*
Multi User platform (supports Socket connections)
*
Multi Threaded
*
Client GUI presented in a Web browser
"
Serial port interfacing
o YMODEM file transfer at up to 115200 baud3 7
o Enumeration of underlying communications ports
* Visualizations presented to user via WWW
o
*
Powerful Matlab visualizations
SQL database interfacing
o Well defined schema to represent vehicle data38
o Queries returned to user GUI in table format
" bits per second
38Appendix C
68
Chapter 5
Code Architecture
5.1 Objectives
There are many issues that need to be addressed simultaneously in building a distributed
system [Rajkumar 95]. The following set of objectives was addressed in composing the
RIPV framework:
" The system should be configurable to a variety of implementations so as to
support adaptation of and introduction of new resources.
" The system should be capable of deployment in heterogeneous computing
environments.
" Interacting with resources will happen over a range of temporal scales.
" Multiple users will be accessing the system, with an emphasis on them being
remotely located with respect to the device they will be interfacing.
" All system clients' components should be loaded dynamically over the Internet.
On a client, local software installation should not be necessary.
" Security
*
Scalability
5.2 Design Considerations
The challenge in designing this system stemmed from the essentially "open-ended
constraints" imposed by a subset of the requirements listed in the previous section.
Designing a robust and adaptable system necessitated abstracting the fundamental
69
features desired in handling the above requirements, and spurned my interest to evaluate
current versions of systems that accomplish these criteria.
5.2.1 Real Time Systems
Given that one of the immutable requirements was that this system need to present the
user with a means of accessing data on an AUV or other ocean vehicle (like the Slocum
glider), the temporal nature (i.e. the user will need to access the onboard file system of a
robot through a telemetry link that exists during the interval of time that the vehicle is
within the range of the link) of real-time system design was a natural choice for
comparison of how these types of problems were being solved. Further, when an AUV
or glider surfaces and requires immediate attention, the interaction will take place in a
near real-time fashion. Specifically, one can characterize the interaction as soft or hard
real-time [Kopetz 97], depending on how you define the consequences of missing a
deadline. What this investigation elucidated was that (1) a real-time approach, although
desirable on a certain level, was not practical for this system to support, and (2) that
developing the concept of tasks for the system to carry out would be a useful abstraction
to implement.
There are several assumptions here that eliminate the need for real time deadlines. First,
vehicles have a degree of redundancy that does not lead to a failure mode if
communications are intermittent. Second, given the spurious nature of communications
over a vast distance (i.e. via an RF modem) another level of complexity is added to a
system [Rajkumar 95] that supports establishing deadlines for milestones when there is
no guarantee that the data packet being transmitted arrives. Third, the nature of common
70
AUV functionality like surveying, map making or other application specific missions is a
process where decisions about what is the next important thing for the vehicle to do is
either made by the human operator or is a function of the behaviors programmed into the
control software. This does not mean that truly autonomous systems should be free of
deadlines, rather the RIPV system will be a platform where investigating how to impose
deadlines should and will be able to take place.
5.2.2 Telesemantics
The specific users, or clients would make requests to retrieve data that resided
somewhere (on a vehicle, for instance), but the delivery of this information would have to
be mediated by a central repository, or server. It became apparent that in order for this
thesis to be useful to the community of individuals (like research scientists) who use
instrumentation as a means of understanding their environment, incorporating the ideas
associated with teleoperation,mobile networking and nomadic computing would be
useful additions to the traditional model of client-server interactions in current DIS
architectures like a Geographic Information Systems (GIS). NASA pioneered
teleoperation, or the ability to remotely manipulate an object [NASA].
Recent experiments with Web-based telemetric and teleoperation (WTTS) systems have
been attempted [Moon 99]. Implicit in this framework for thinking about delivering data
to a requesting client is the observation that the utility of the system would be extended if
a remote machine could perform a duty, or service, to the client-server system.
Essentially this was the motivation for distributing the computation: to allow for the
functionality in the system to be limited by the diversity of its services.
71
5.2.3 Transport Layers
Prior to actually writing any code for the RIPV system itself, a survey of the delivery
methods of information over the Internet were evaluated and it was determined that the
TCP/IP protocol best fit the needs of this system. As opposed to connectionless transport
layers like UDP, a connection-orientedstyle like TCP/IP guarantees ordered packet
arrivals between two nodes and provides all the reliability needed to communicate across
the Internet [Comer 96]. This is the kind of performance that would be necessary if
multiple clients were being hosted. Loss of packets could not be tolerated as the number
of users grows, quite simply because the complexity of building redundancy should
already be handled at a low level if you want to focus on the development of an adaptable
system framework.
An attractive alternative that is similar to UDP is multicast, a datagram network protocol
that allows an application to place a single packet on a network and have that packet
transported to multiple recipients [Hughes 99]. The largest deployment of multicast on
the Internet is the MBone, which is an experimental multicast framework that transports
multicast packets through TCP/IP tunnels between multicast enabled islands. Currently,
the overhead associated with having routers determine whether adjacent networks support
multicasting undermines the utility of this delivery method. Perhaps in the future, the
barriers to wide scale deployment of multicast packet transfers will diminish and it will
be a more desirable form for implementing multiple client systems.
72
So with the decision to implement TCP came the requirement that a Socket would be
used for streaming data between the client and the server, as this is Java's representation
of a TCP connection. On the service side, RMI was the choice to solve the problem of
handling the Socket connections and keeping tabs of remote services as described in
Chapter 3. Figure 5-1 shows the socket connection between the RIPVClient and the
RIPVServer that is used for transmitting information between them.
browser
.
applet
server
internet-
Figure 5.1: Socket connection between the RIP VServer and RJPVClient
5.2.4 Application-Oriented Design
The application-orientedapproach taken in designing this distributed system is
considered such because the underlying RIPV framework represents a conventional
application program solution to a problem that is doled out to PEs. A variety of factors
lead to this design procedure, rather than having built the system around a
communications protocol as the driving design criteria. Since it was envisioned that this
software would operate within the context of existing robot systems, it is intended to be
useful over a broad range of underwater robotic systems that already are in use, but can
be molded to accommodate future incarnations as well.
As an example as to how the application model drove the solution, consider the model in
figure 5-1. It lacks completeness if there is more than a single user of the system, thus
there would need to be a means of supporting multiple-to-one interfacing, either from a
client-to-server or a device-to-service perspective. The concept of a Handler, or process
73
that manages an interaction, was introduced. Implemented as a thread
(java.lang.Thread), a handler could be used on the server side for watching a socket
connection and then it would be known as a SocketHandler, or it could be used on the
service side for paying attention to a serial port and be referred to as a SerialPortHandler.
Therefore, the RIPVServer is considered a concurrentserver because it can handle
multiple requests at a time, whereas a RIPVService that uses a Handler is concurrent with
respect to the devices that it can concurrently interface. This leads to the question of how
to handle requests, which is covered in the next section, 5.2.5.
This aspect of concurrency is implemented at a certain cost of the actual semantics of
addressing multiple remote executions, however, and therefore a variation on a strategy
known as mutual exclusion is borrowed from Sun Microsystem's Open Network
Computing (ONC) RPC. The ONC RPC mechanism specifies that at most one remote
procedure in a remote program can be invoked at a given time [Comer 96]. Similarly, the
RIPV communications model provides for single event task execution on the remote
services through extensive use of Java's synchronizationtechniques. For instance, one
does not have to worry about a procedure like doing a directory read of a glider's
microprocessor being interrupted. Unfortunately, all of this does not guarantee reliability
in the strict sense. Requests may be lost, and connections intermittent, especially when
communicating with a vehicle over a vast distance. Thus, the RIPV system is a zero-ormore system, meaning that the client may not receive a reply from a request. The system
does keep track of active connections and makes this information available to the user
(see figure 4.6).
74
The RIPV system is designed to act as an interface layer on top of pre existing hardware
solutions. The system is minimally invasive in this sense and behaves like a command
line interface to the underlying resource, be it a vehicle attached to a serial port, a
connection to a database, or a visualization package like Matlab. Imposing a protocol to
drive communications between the RIPVService (i.e. the SerialPortServer that is
watching a serial port attached to a vehicle) and its data device was done loosely. As
opposed to developing an infrastructure from the bottom most layers like the hardware
instruction set used to power the operating system of the controlling microprocessor,
mutual exclusion guarantees the entire conversation between a service and its respective
device takes place based on the act of presenting the device with a request and awaiting a
reply.
Explicit guidelines for how to interface different resources are adopted from rules on how
an operator would normally interface the data device. Support for an interface definition
language, such as the one in the CORBA framework, was deemed unnecessary because
of the more general GenericRMlInterface used to communicate between the server and
services. It is this interface that gets modified by a developer to represent the new
method calls to remote services. Thus, the programmer who develops the capabilities of
the RIPV system must be careful when implementing a service and be consistent that a
method defined in the remote interface is reflected in the service itself. On the low level,
application specific code must be written by the programmer to achieve desired
functionality at the service, but this would have to take place regardless.
75
5.2.5 Communication Model
The communication model was born out of a need to send information from one part of
the system to the other, and have a response (that arrives at the appropriate recipient)
generated. Information from the client, server, or services is encapsulated in an object
known as a Message, which is passed between modules internally from storage
MailBoxes that reside in a PostOffice. This necessitated identifying the components of
the system that would be producing information (i.e. the services have unique service
id's) as well as keeping tabs on where a message originated (i.e. from what client id).
Mappings are used to tag a service uniquely, as well as to define peripheral functionality
that the GUI might be interested in. An example would be the ability to request the
contents of the uploaded file directory. Since this involves updating the GUI, the handler
responsible for the client's socket (the ClientSocketHandler)examines a returned
message by checking the service id and then calling the appropriate method to write to
the GUI from the GUlnterface. See Appendix B for a description of the implemented
service IDs.
The services make themselves known to the RIPVServer by following a registration
scheme whereby they pass a reference of their remote interface to the ServiceReference
objects that are created when they register via an RMI call to the RIPVServer's
GenericRMlInterface. This reference allows the RIPVServer to communicate via an
RMI link that is transparent to the client. The default is for a Thread on the client to
periodically check the RIPVServer for new services that have registered; the user can
request this information explicitly at any given time.
76
The activities of the RIPVServer and RIPVServices are triggered asynchronously. User
input like command line interfacing a vehicle, or receiving a graphical output from
Matlab all happen over different time scales, and it is important that the system be able to
store actions that need to transpire once requested. An event channel is adopted that is
based on priority queues which is similar to [Moon 99], but not in a real time sense. A
storage device called a MailBox contains four separate queues for handling messages;
three are prioritized and relate to incoming mail, referred to as an
IncomingServerMessage or IncomingServiceMessage(ISM), and the fourth queue stores
outgoing mail known as an OutgoingServerMessageor OutgoingServiceMessage(OSM).
These queues are implemented as First In First Out (FIFO) and depicted in figure 5.2.
Outbox
Inboxes
Importance
1 Normal
2 Priority
3 Urgent
Figure5.2: MailBox queues
5.2.6 Process Management
The message delivery system and inter process management is overseen by a
TaskManager. A TaskManager's primary functionality is to serve as the message parser
to determine what action needs to be taken by the system to accomplish the command in
the body of the message Header. To do this, the TaskManager is passed messages from
either the InboxAssistantThreador OutboxAssistantThread, which are a pair of threads
77
assigned to each MailBox that is created to store messages for the server or service. For
convenience, the server has only one MailBox, called the "RIPV Post Office", and this is
where requests from the client and replies from the services are stored. A service, on the
other hand, can instantiate as many MailBoxes as it needs to keep track of messages for
different handlers or for coping with requests about its status. By default, a TaskManager
watches over whatever MailBox it has been assigned to, and only is concerned with that
MailBox. The nature of the service using a MailBox dictates what other objects the
TaskManager has access to. For instance, on the SerialPortServer, a SerialPortHandler
watches over a specific serial port, and thus in order to place the command from a
message on the TX pin of the serial port, the TaskManager has a reference to the
SerialPortHandler so it can access the appropriate communication stream.
Figure 5.3 and 5.4 shows the layout of the RIPVServer and RIPVServices, respectively.
These architectures are comprised of the same components that function in different
capacities based on what module (server or service) of the RIPV system they are in. Each
server or service contains one PostOffice. Common to both implementations is how an
incoming message is received and then scanned and placed in the appropriate MailBox in
the PostOffice based on the mailboxAddress variable in its Header. Each MailBox has a
MailBoxKey that can lock the Mailbox when a command is actually being executed and
this is how the mutual exclusion is supported.
78
Focket,.Handler
scanO
!,
0
serviceReply()
n
tptStream os
--- -------
OM
-an(-
OBAT
MAT
-
----------..
TaskManager
(
service8guest
I
! ! ! ! !
!
I
I
I
I
I
I
I i
parseHeader(message) {
searchfor service in ServiceReferences
case serviceExists:
ServiceReference.serviceRequest(message)
default:
header.getBodyo
perform action
new OutgoingServerMessage()
I~
parseFooter(message) {
searchfor clients in clientsV Vector
I!__
case clientExists:
SocketHandler.os.writeObject(
new OutgoingServerMessageo)
default:
----alert server that client has disconnected
}
______ ____
.L.................
. . . . . .
...............................................
Figure 5.3: RIPVServer architecturewith pseudo code
79
.
....
. .........
Postofficel
gerviceReques t(mo<
po .scan (ms
.......
).........
aIBox:COM
MailBox:COM1t
...... ..
...........
MaiU~ox.COMj
0S
3AT
OSM
IBATJ
B3AT
TaskManager
handlerV
parseHeader(message) {
if (usingAHandler){
searchfor handler in handlerV Vector
case handlerExists:
send commandfrom header.body to handler
default:
alert RIPVServer to failure
Handler
}
else{
-- .............
.......
-.. ---- ....-
header.getBody()
perform action with command If action relates to the
t
i
hi
d4d1
device.
the
data
pass control over to
Or return a new OutgoingServiceMessage
with results of completedaction
}
}
-
.......................................
parseFooter(message) {
call back to the RIPVServer with result
~using serviceReplyo method
.........................
.....................
Figure 5.4: RIPVService architecturewith pseudo code
80
.
........... L ....... 1
The InboxAssistantThread's algorithm is a serial, pre-emptive searching pattern that
guarantees that highest priority messages are removed from their queues first. Once an
incoming message is removed from an Inbox queue, the TaskManager parses its header.
In the RIPVServer, the message is either ferried off to a service via an RMI call from the
ServiceReference's GenericRMlInterface, or the TaskManager handles the message
locally and the reply is placed in the Outbox of the RIPV Post Office. An
OutboxAssistantThread delivers messages off of the Outbox queue back to the
TaskManager for parsing of the Footer. The TaskManager has a reference to the
SocketHandler and returns the outgoing message to the RIPVClient for perusal by the
ClientSocketHandler and GuiManager of the RIPVClient.
The RIPVService operates in a similar fashion to the RIPVServer, only instead of a
single MailBox in the PostOffice, there are at least as many MailBoxes as there are
connections to different data devices. The PostOffice scans an incoming service message
that is received via an RMI call from the RIPVServer and places the message in the
appropriate MailBox. Again, an InboxAssistantThread passes this message to the
TaskManager whose parses the Header, only instead of checking a ServiceReference an
action is taken based on the contents of the Header's body. This action may constitute
passing a query to a database via a reference to the database's connection, or writing
information to a file so that Matlab loads the contents of the data file for imaging, or
perhaps it is to put a command on a SerialPortHandler's serial port reference to a
vehicle's telemetry hardware. A response is returned to the appropriate MailBox's
Outbox queue and since an OutboxAssistant is watching this, the message is passed to the
TaskManager to parse the Footer. A successful reply from the RIPVService to the
81
RIPVServer is finalized with an RMI call to the serviceReplyo method in the
GenericRMlInterface of the RIPVService's reference to the RIPVServer.
The majority of the RIPVClient's processes are handled by Java's event processing
architecture implicit in the GUI widgets and applet class, thus a TaskManager is not
employed on the client side to dictate the actions taken by the RIPVClient. Instead, a
ClientSocketHandlermediates the message passing through an ObjectStream that is
layered on top of the socket connection between the RIPVClient and RIPVServer. The
ClientSocketHandler processes messages and affects change in the GUI by calling
methods that are made public in the GuiManager'sinterface, GuiInterface. These
method calls to the GUI components contain the new information that has been returned
by the RIPVServer and the user is interested in. Figure 5.5 illustrates this chain of
commands.
RIPVClient
Action!
(i.e. button press)
GuiManager
ClientSocketHandler
ObjectStream.write
GuiInterface
retThrribut
i(tn)
switch (serviceID)
component
updated
{
OSM
'suiManager.update()
Figure5.5: RIPVClient process management
5.3 Package Structure and Class Hierarchy
The classes that comprise the complete RIPV system are grouped into packages by
functionality; the root package is referred to as mit.oe.deslab.rdamus.ripv. In Java, the
82
super class of all classes 39 is the java. lang.Object. All objects created by the programmer
inherit from this class. For the RIPV system, the grouping of class behaviors into
packages is used as a means of organization for clarifying the role of a particular piece of
the system, with the core group of classes (the RIPVServer, RIPVServices and
RIPVClient) belonging to the root package. A complete listing of the classes and the tree
structure associated with them is included in Appendix F.
mit.oe.deslab.rdamus.ripv
mit.oe.deslab.rdamus.ripv.assistants
mit.oe.deslab.rdamus.ripv.exceptions
mit.oe.deslab.rdamus.ripv.handlers
mit.oe.deslab.rdamus.ripv.managers
mit.oe.deslab.rdamus.ripv.messages
mit.oe.deslab.rdamus.ripv.panels
mit.oe.deslab.rdamus.ripv.services
mit.oe.deslab.rdamus.ripv.trees
Table 5.1: RIPV packages
5.4 Database Schema
A relational database model was developed for the purpose of storing information that is
extracted from an underwater vehicle so that it can be accessed at a later date for
interrogation. The requirements for underwater vehicle operation were analyzed and the
conceptual schema that resulted from this analysis is presented in figure 5-6. The
components of this schema are individual tables containing relations that are pertinent to
characterizing underwater vehicle missions and the data that is collected on the mission
by individual sensors. Each relation (Vehicle, VehicleData, Mission, Leg, Sensor,
SensorData) has attributes, one of which identifies the relation instance, or tuple,
'9 See chapter 4 for a description of classes.
83
uniquely and is referred to as the PrimaryKey, denoted by the [PK] next to the attribute
name. Each attribute is of a specific type, which is listed after the colon. A ForeignKey
[FK], which references the primary key of another relation, ensures referentialintegrity
[Elmasri 94]. A primary key is a unique identifying characteristic of the table's relation
and therefore can be referenced by a foreign key in another table to map the information
from the primary key's table to that of the foreign key. This database schema is written
in SQL and supports implementation in a Database Management System (DBMS).
MISSION
VEHICLE
MISSIONID[PK]:NUMBER
VEHICLE_ID[FK]:NUMBER
NAME:VARCHAR2
DESCRIPTION:VARCHAR2
STARTT:DATE
ENDT:DATE
VEHICLE ID[PK]:NUMBER
NAME:VARCHAR
DESCRIPTION:VARCHAR
VEHICLE DATA
LEG
LEG ID[FK]:NUMBER
T:DATE
X:NUMBER
Y:NUMBER
PITCH:NUMBER
ROLL:NUMBER
LEGID[PK]:NUMBER
MISSIONID[FK]:NUMBER
NAME:VARCHAR2
DESCRIPTION:VARCHAR2
STARTT:DATE
ENDT:DATE
SENSOR
SENSOR DATA
SENSORID[PK]:NUMBER
NAME:VARCHAR2
DESCRIPTION: ARCHAR2
UNITS:VARCHAR2
RAWUJNITS:VARCHAR2
LEG ID[FK]:NUMBER
SENSORID[FK]:NUMBER
T:DATE
VALUENUMBER
RAWVALUE:NUMBER
Figure5.6: Conceptual Schema for databasestorage of vehicle data
84
Chapter 6
Implementation
For a complete installation and execution guide, please see the setup.readme reference
located in Appendix E.
6.1 Hardware Setup
Platform independence of the code is a function of the Java language. As a result, this
software functions across heterogeneous environments without hesitation. Thus far, all
of the machines used to test the code have been at least Pentium class systems with more
than 16MB of RAM. The Java Runtime Environment currently takes up about 5MB of
.hard drive space and is a one-time installation required for a hardware platforms to host
Java applications to garner the JVM for interpretation of compiled code as described in
chapter 3.
6.2 O/S Platforms
The requirements for implementation of the software vary based on what part of the RIPV
system you plan on executing. The version of the JVM used to compile the current
version of the code is Java 2, version 1.2.2. All machines that want to participate in the
RIPV system must have an Internet connection and be addressable by a unique IP
address. Currently there is no support for Firewalls or Proxies, although RMI does make
provisions for it.
85
For service providers that will be hosting RIPVServices, platforms that have been
successfully used include Windows NT, 2000, 98 and 95, SGI running Irix 6.x, and
Solaris. If you plan on implementing the RIPVServer, your system must be able to open
Socket connections. This implies that an operating system that supports server
applications like Irix, Solaris, Linux or Windows Server (both NT and 2000) should be
used for convenience. However, non-commercial applications like Tomcat 40 , or the
myriad of other server software can be used to make a non-server machine with an IP
address capable of hosting clients. If you plan on being a client, then see the next section.
6.3 Browser Software
The RIPVClient is loaded as an applet, and therefore the browser the client that is uses to
load software must support the JVM that the RIPV was written in. Hot Java or Netscape
and Internet Explorer versions 4.x -5.5 will most likely need to download the latest
virtual machines at [JVM Microsoft, Netscape], and have the latest Java plugin for the
browswer41.
6.4 TestBed
The design of the RIPVtool is based primarily on working with the WRC Glider, Slocum,
which uses a Persistor Instruments [Persistor] CF1 32bit-microcontroller as the onboard
"brain" of the vehicle. The RIPV tool anticipates interfacing this processor by
incorporating the javax.comm. as explained in chapter 4. Both a direct connection to the
processor and communicating through a Free Wave RF modem has been tested.
40
http://apache.Jakarta.org
4' http://java.sun.com/products/plugin/
86
6.5 Testing
Testing has taken place over the course of development of the software system. The
results are presented here.
6.5.1 Serial Port Interfacing
Successful tests between a CF1 hardwired to a serial port (see figure 6.1) as well as over
a radio telemetry link have been conducted. The CF 1 responds to command line
arguments as expected (e.g. dir, del) and has been tried at 9600baud and 115200 baud.
Furthermore, an adaptation of the YMODEM protocol allows for uploading and
downloading of files to the CF . Any file size can be transferred.
Figure 6. 1: Succesful 'dir'command returnsdirectory listingfrom CF1
87
6.5.2 Database Connectivity
Queries on data stored in the Cloudscape [Java] RDBMS, using the SQL database
schema shown in Appendix C have been performed and successfully returned to the
RIPVClient. Figure 6.2 shows the tabbed pane that houses the returned database queries.
The tab shows the text from the query and a javax.swing.JTable4 2 presents the user with
the results of the query.
Figure 6.2: Returned databasequeries
4 http://java.sun.com/j2se/1.3/docs/api/avax/swing/JTable.html
88
6.5.3 Data Visualization
Visualizations in Matlab have been processed and sent back to the RIPVClient. The
visualizations are stored as high quality jpeg files and can be downloaded from the
RIPVServer in addition to observing them directly in the GUI. Figure 6.3 is an example
of a 2 dimensional data plot with false data to demonstrate the data visualization concept.
This graph does not have a legend because it was not specified in the data file.
Figure 6.3: Simple 2-D dataplot
89
Chapter 7
Conclusions and Future Work
7.1 Conclusions
The RIPV tool is one of the first architectures to combine Remote Method Invocation,
Java's object oriented capabilities, a client-server model, the features of an applet, and the
Web to present functionality to users that can reside anywhere on a network and still gain
access to the resources they are interested in. RMI is implemented as the communication
protocol for distributed computing access to remote resources and the Web is utilized as a
means of presentation. This combination of interfacing and accessibility create a data
information system without the need for the client to download any software to their
system. This fact alone separates this system from previous implementations of clientserver architectures that are platform specific in nature or might require the user to
download executable code to run on their machine.
The advent of the hosting of program logic in Web space is just beginning to gain
momentum in the distributed information community. The majority of Web applications
are still static representations of data, without provisions for adapting the code to handle
different situations. By presenting the features of the RIPVServer in an applet to the
user, modem GUI controls are used to simplify interaction with the RIPVServices, a
secure environment to communicate with the RIPVServer is ensured, and a broad scope
of functionality can be achieved through high level application logic that is conveniently
available in an applet, despite running in a Web browser with limited memory resources.
90
The RIPV system answers a crucial problem in information dissemination to a remotely
located data device. One of the large hurdles encountered in not downloading an
application to the client machine is the loss of control over System level command like
enumerating files in a directory. By coupling the utility of the upload.cgi script with the
logic of the RIPVServer, a simple and powerful way around the problem of uploading a
file from the client to an AUV is solved.
The largest contribution of this work is the achievement of cross-platform independence
for the purpose of Remote observation of an ocean resource, like an AUV or other data
logging equipment that use microprocessors. There are discussions in the literature about
the utility of having all of the components of this system, but no prior attempts at
homogenizing the architecture for such a system have occurred. Specific solutions that
require unique configurations of software fall short of providing the flexibility that the
RIPV system enables. The advent of RMI has enabled Java-based programming to
establish its preeminence in becoming a suitable platform to develop networked solutions
to a distributed information problem such as the one addressed in this thesis.
Taking the client-server paradigm a step further, the RIPV approach presents a user with
the three core functionalities provided for in the RIPVServices. These services extend
the capabilities of a researcher and provide a way to develop efficient mission plans by
presenting a coherent means of organization of ocean-related data.
The system can handle multiple users concurrently accessing data in near real-time, and
can be scaled to incorporate more services. The system is adaptable and can be
reconfigured with a moderate understanding of object-oriented programming in a
91
relatively short time frame to accommodate changes required by a specific application.
Methods are defined in interfaces that dictate the characteristics of the server and
services, as well as the client. Thus, each fundamental part of the RIPV system can be
modified, and through the use of Mappings, maintain a level of consistency to guarantee
desired behaviors.
Pros
Cons
Adaptable
The clientID/servicelD requires a mapping
Integrate across heterogeneous platforms
Perhaps not as easily configurable as the
CORBA broker architecture
Uses remote method invocation
MailBoxes only have 3 queues
Distributed system
Multiple threads can tax a processor
GUI defines the interface
Basically, design decisions had to stop at
being completely ubiquitous.
Message passing and the ability to define
new fields in the Header and Footer make
for highly adaptable communicationsoriented design
Could not write every method that can
anticipate what the ultimate requirements
of every project would be.
Multi threaded environment
Perhaps compartmentalizing of more
interfaces that were specific to different
classes would be a more intuitive way of
organizing the methods available
Priority based queues
Serial port interfacing made easy
Client loads in a web browser
Remote interface
Gui Interface
Table 7.1: Advantages and Disadvantages of the RIPV System
92
7.2 Future Work
The work presented in this thesis should be viewed as a framework for how to design a
multi-user environment for ocean vehicles with RMI services in Java. Future work with
this software architecture should include extending the capabilities of the system by
writing new services to present to the user. It is desirable to establish field operations
with the Slocum glider to test a coherent system for coastal zone observation.
7.2.1 New Functionality
The most intuitive way to improve the capabilities of the RIPV system is to write more
services. To do this, a developer would extend the RIPVService class, decide on either
the Handler or static approach for interfacing whatever new resource or application the
service encapsulates, create a new unique servicelD that corresponds to this new set of
actions, and then start the service. A new panel for the GUI will likely be introduced so
that the functionality desired can be presented to the user. Therefore, the GuiManager
and RIPVClient will have to be updated accordingly.
This research was motivated by the concept of interfacing a microprocessor and making
this interface available to multiple public recipients. With that in mind, it would be
useful to see a service developed that allows for true global interconnectivity with a
mobile platform like an AUV. The supposition here is that the AUV has telemetry
hardware that affords it a large coverage area, like a satellite card.
The RIPV system would be a useful platform to experiment with algorithm development
for AUV related activities. One such activity might include improving on navigation
93
related objectives like path planning and use Graph Theory to help an operator plan an
optimal mission route much like a traveling salesman problem is approached and solved.
7.2.2 Java Beans
Java has developed its concept of distributed applications into an Enterprise solution
based on the RMI framework. Java Beans are objects that reside in a container located
on a network and have special methods for exposing their state and can be used for
distributed tasks. It would not be a far cry to improve upon the RIPVmodel by creating
the services as Beans as much of the code can be used to retain the functionality. The
end result would be a highly modular system with specific entities (the Beans) that could
then be used as the basis for commercializing the access to data and creating new
business models for ocean technology companies that provide services to researchers and
scientists. See [Java Beans intro] for more information.
7.2.3 Mission Planning Efficiency
With all of the functionality that the RIPV tool provides to a vehicle operator, it would be
interesting to study whether mission planning becomes an easier task. AUVs are
becoming increasingly prevalent and one of the benchmarks that have set the successful
incarnations apart from the rest is the ease in which a mission can be carried out. Mission
planning can be a tedious undertaking, as the criteria for evaluating the success of the
mission is inherently subjective and ultimately related to the scientist's (or experiment's)
goals. Whether or not this is a limiting factor in the design of an AUV has yet to be
determined; most AUVs are primarily scientific instruments and are most likely
94
instrumented by the engineers that had something to do with the development of the
vehicle.
Controlled experiments with specific goals could be used to test an operator's ability to
cycle through a set of mission objectives and then develop hypotheses based on the data
that their vehicle has returned. Performing multiple missions in succession in a given
time frame would be the goal. The quality of the hypotheses and ability to finish all of
the missions in the allotted time would give a heuristic means of analyzing the efficacy of
the RIPV tool in mission planning.
7.2.4 Autonomous Mission Planning
As we get closer to having adaptive sampling networks in the ocean, the issue of how to
plan and execute missions autonomously is raised. Currently while working at Webb
Research, I am developing an extension of the RIPV system that will interact with a
Slocum glider without the assistance of an operator. A user inputs a WorkFlow, which is
a collection of actions that the vehicle should execute after having surfaced and made
contact with the shore node. This has required the addition of a new Manager class
object that keeps track of a vehicle when it surfaces, and the addition of MailBoxes to
store the WorkFlows being passed to the glider. The rest of the functionality is leveraged
off of the RIPV system. The RIPV framework is proving itself to be a worthy test-bed
where methodologies for autonomous mission planning can be ascertained.
95
Appendix A - Naming Conventions
I. The package name for the RIPV system is the prefix to any class that is used in the software that is not
part of the Java 2 standard packages. There are 9 total packages, including the root package.
The fully qualified package names begin with the root:
mit~e~deLab-rdamusip
The remainin 8 acka e names are
mit.oe.deslab.rdamuLs.ripv~assistants
mit.oe.deslab.rdamus.ripv.exceptions
mit.oe.deslab.rdamus.ripv.handlers
m it.oe.deslab.rdamus.ripv.managers
mit.oe.deslab.rdamus.ripv.m-essages
mit.oe.deslab.rdamus.ripv.panels
mit .oe .deslab.rdamus .rip-v. services
mit.oe.deslab rdamus.ripv trees
Thus, the addition of a new Manager type would take on the name:
mit.oe.deslab.rdamus.ripv.managers.NewManagerjava
Notes:
The fully qualified name of a class corresponds to the directory structure that should be used to store the
(on a Windows environment). Therefore, the NewManager. j ava
file by replacing the ' . ' with a '\
file would be found at:
C:\src\mit\oe\deslab\rdamus\ripv\managers>NewManager.java
Assuming the directory, C: \src, is where the source files are stored. See more in Appendix E.
II. Defining a RIPVServiceName to define a source (.java) file:
server
Service Component
e.g. The service that watches the SerialPortis:
SerialPortServer
III. The fully qualified name of a service that is registered with the RIPV system is:
IP address
>:
RIPVServiceName
e.g. the DatabaseServerlocated at deslab.mit.edu would be called:
DatabaseServer>::<deslab.mit.edu
IV. A MailBox is characterized by the full qualified name of a service and a communications handle:
Inde
rRIPVServiceNamel > : < I P address I>ICOM handle
e.g. the MailBox that is associated with the COMport 1 of the SerialPortServerbeing run on
imvros.mit.edu (an NT machine) is:
SerialPortServer>: : <imvros .mit . edu>COM1
Notes:
The DEFAULT mailbox handle for a Windows platform is COM.
The DEFAULT mailbox handle for a
Unix platform is TTY Thus, the MailBox for the DataVisServerlocated at imvros.mit.edu is:
DataVisServer>: : <imvros . mit . edu>COM1
96
Appendix B - Mappings
IDs
A six digit number string is used to define the different aspects of the system that require uniqueness.
Service IDs
Although the RIPVServer knows about the RIPVServices because of the ServiceReference's
ServiceDescriptor object that keeps track of pertinent service information like name and location, the server
is clueless about the origin of RMI calls from the services. Thus, the RIPVServer can easily send a
message to the appropriate service by knowing the serviceDestination and mailboxAddress
parameters of the Header, but cannot discern where a returned OutgoingServiceMessage has originated
from. To solve this problem, a unique service ID (SID) is associated with each type of service. This is
very similar to the concept of a process ID in an operating system platform like Unix.
RIPVService
SID
DatabaseServer
666666
SerialPortServer
888888
DataVisServer
999999
Functionality IDs
The RIPVServer and RIPVServices can be sent commands that begin with the question mark, ' ?',
character. This set of commands is useful for interrogating the server and services for information that
appears in the GUI. It is possible to add more functionality by creating a larger set of these commands.
The command set is shown in the table below. Each command maps to a uniquefunctionalityID (FID) so
that the ClientSocketHandler calls the appropriate method from the GUIlnterface based on what the FID of
the reply is. The FID is sent back as the service ID variable of the Footer received.
Command
FID
?dldir
444444
?uldir
444445
?dlfiles
444454
?ulfiles
444455
?mailboxes
555555
?status
555666
?services
777777
Functionality
The following table is a reference for the task associated with each command.
Command
Action taken
2dldir
The directory used by the RIPVServer to store downloaded
files from RIPVServices is returned to the RIPVClient's
GuiManager and added to the FIM panel as the downloaded
directory root node of the FileTree.
?uldir
The directory used by the RIPVServer to store uploaded
files from the RIPVClient is returned to the RIPVClient's
GT WTT4nnir nnd ndded tn the PTM nnnel nq thi Iinrnncded
97
directory root node of the FileTree
?dlf iles
Retrieves a listing of the files that have been downloaded
from RIPVServices to be listed in the FIM panel under the
downloaded directory root node from the ? d1dir
command
?ulf iles
Retrieves a listing of the files that have been uploaded from
the RIPVClient to be listed in the FIM panel under the
uploaded directory root node from the ?uldir command
?mailboxes
In order to know what MailBoxes are available at the
registered services, this command is issued to the
RIPVServer and the results are passed back to the
RIPVClient's GuiManager and placed in the MAM panel's
MailboxTree
?status
When the user selects a MailBox, this command is issued to
the RIPVServer which returns the MailBox's status to the
RIPVClient's GuiManager and updates the SS label in the
COM panel to reflect the status: available or not available.
The semantics for determining if a particular MailBox is
available is specific to the service.
? services
When a user is validated, this command is sent to the
RIPVServer to get a listing of what services are available.
The listing is passed back to the RIPVClient's GuiManager
and placed in the SEL panel's ServiceTree
98
Appendix C - Database Schema and Code
VEHICLE
MISSION
VEHICLEID: NUMBER [PK]
NAME: VARCHAR2
DESCRIPTION: VARCHAR2
MISSIONID: NUMBER [PK]
VEHICLEID: NUMBER [FK]
NAME: VARCHAR2
DESCRIPTION: VARCHAR2
STARTT: DATE
ENDT: DATE
LEG
VEHICLE DATA
LEGID: NUMBER [FK]
X: NUMBER
LEGID: NUMBER [PK]
MISSIONID: NUMBER [FK]
NAME: VARCHAR2
DESCRIPTION: VARCHAR2
STARTT: DATE
Y: NUMBER
T: DATE
PITCH: NUMBER
ROLL: NUMBER
ENDT: DATE
SENSOR
SENSOR DATA
SENSORID: NUMBER [PK]
NAME: VARCHAR2
DESCRIPTION: VARCHAR2
UNITS: VARCHAR2
RAWUNITS: VARCHAR2
LEGID: NUMBER [PK]
SENSORID: NUMBER [FK]
T: DATE
VALUE: NUMBER
PK - denotes the Primary Key, or unique identifier, for referencing this table
FK - denotes the Foreign Key that refers to the PK of a related table
99
The following SQL code can be loaded into a database to take advantage of the database schema described
on the previous page. The strength of this schema stems from its simplicity. It can easily be adapted to
support various vehicle parameters and sensor types.
/**vehicleDB.sql */
CREATE TABLE vehicle
vehicleid INTEGER CONSTRAINT vehiclepk PRIMARY KEY,
name VARCHAR2(64)
CONSTRAINT vehicle name nn NOT NULL,
CREATE TABLE mission
(
description VARCHAR2 (256));
mission id INTEGER CONSTRAINT mission-pk PRIMARY KEY,
vehicleid INTEGER CONSTRAINT missionvehiclefk REFERENCES
vehicle(vehicleid),
name VARCHAR2 (64) CONSTRAINT mission name nn NOT NULL,
description VARCHAR2 (256),
startt DATE,
CREATE TABLE leg
(
endt DATE);
leg-id INTEGER CONSTRAINT legpk PRIMARY KEY,
mission id INTEGER CONSTRAINT leg missionfk REFERENCES
mission(missionid),
name VARCHAR2 (64)
CONSTRAINT legname nn NOT NULL,
description VARCHAR2 (256),
startt DATE,
endt DATE);
100
(
CREATE TABLE vehicledata
leg-id INTEGER CONSTRAINT vehicledata legfk REFERENCES
leg(leg_id),
t DATE CONSTRAINT vehicle data t nn NOT NULL,
x INTEGER CONSTRAINT vehicledata_x_nn NOT NULL,
y
INTEGER CONSTRAINT vehicle data_y_nn NOT NULL
pitch DOUBLE PRECISION CONSTRAINT vehicledatapitchnn NOT NULL,
CREATE TABLE
PRECISION CONSTRAINT vehicle
sensor
data roll nn NOT NULL);
(
roll DOUBLE
sensor id INTEGER CONSTRAINT sensorpk PRIMARY KEY,
name VARCHAR2(64)
CONSTRAINT sensornamenn NOT NULL,
description VARCHAR2(256),
units VARCHAR2(8)
CONSTRAINT sensorunitsnn NOT NULL,
CREATE TABLE
sensordata
CONSTRAINT sensor units nn NOT NULL);
(
raw-units VARCHAR2(8)
leg-id INTEGER CONSTRAINT sensor-data legfk REFERENCES
leg(legid),
sensor id INTEGER CONSTRAINT sensor datasensorfk REFERENCES
sensor(sensorid),
t DATE CONSTRAINT sensordata_t_nn NOT NULL,
value DOUBLE PRECISION CONSTRAINT sensor data value nn NOT NULL,
rawvalue DOUBLE PRECISION CONSTRAINT sensor data raw-value nn NOT
NULL);
101
Appendix D - CGI Script & Matlab file
#!/usr/sbin/perl
# --------------------------------------------------------------------# Program Specific Quickie Notes:
* Make Sure The First Line Is Pointing To The Correct Location Of
#
Perl 5.
* Make Sure This Program is chmodded with the permissions '755'.
#
#
History:
Time Stamp:
Version:
# --------------------------------------------------------------------#
Configurable Options
BEGIN
Follow:
{
$SAVEDIRECTORY =
"/tmp-mnt/usr2/deslabl4/rdamus/serialserver/uploaded
files";
#
#
#
#
--
>
Variable:
--
>
$SAVEDIRECTORY
Function:
Defines the path to the
directory
#
on the server that should be
#
as
used
the folder to save files
into.
#
--
>
#
#
--
>
Directory Permissions:
a+rwx
Additional Notes:
This path should not have a
trailing forward
#
#
slash.
Also
is a path,
#
remember that this
#
a URL.
not
Use
something similar to:
#*
/home/myself/www/uploads
#*
$MAXIMUMUPLOAD = 0;
#
#
#
#
#
-- >
-- >
Variable:
$MAXIMUMUPLOAD
Function:
Defines the number of bytes that
Files that
can be uploaded.
exceed
this limit will not be saved on
#
the
#
-- >
#
Additional Notes:
#
in order to
102
server.
Set this to zero
disable size
checking.
$ALLOWINDEX
=
1;
#
--
#
#
#
-- >
>
Variable:
$ALLOWINDEX
Function:
If set to zero, files whose
names begin with
#
the word
#
index will not be
#
Set to one to
#
named index* to be
saved.
allow files
uploaded.
$SUCCESSLOCATION
#
--
>
Additional Notes:
#
--
>
Variable:
$SUCCESSLOCATION
--
>
Function:
=
#
#
Defines the URL that users
should be redirected to if
the script works
#
#
#
properly.
blank,
If
#
this is left
#
page will be
#
user.
a default
returned to the
#
--
>
Additional Notes:
This is a COMPLETE URL,
a path.
#
#
not
}
# End of Configurable Options.
# --------------------------------------------------------------------#
# --------------------------------------------------------------------<-Do Not Change Anything Below This Line.
# -- >
# --------------------------------------------------------------------# ---------------------------------------------------------------------
$I = 1;
chop $SAVEDIRECTORY if
use CGI qw(:standard);
$query = new CGI;
($SAVEDIRECTORY
( (!(-e $SAVEDIRECTORY))
(!(-W $SAVEDIRECTORY))
(!(-d $SAVEDIRECTORY)) ) {
print header;
#
# <--print "Content-type: text/html", "\n\n";
print <<
ENDOFHTMLCODE__;
if
103
i did this
<HTML>
<HEAD>
<TITLE>Error: Bad Directory</TITLE>
</HEAD>
<BODY BGCOLOR="#FFFFFF">
<Hl>Bad Directory</Hl>
<P>
The directory you specified:
<BR>
<BLOCKQUOTE>
<TT>\$SAVEDIRECTORY = "<B>$SAVEDIRECTORY</B>";</TT>
</BLOCKQUOTE>
<BR>
This problem is caused by one of the three
is invalid.
following reasons:
<OL>
Make sure that this
<LI>The directory doesn't exist.
directory is a complete path name, not
It should look
a URL or something similar.
similar to <TT>/home/username/public_html/uploads</TT>
<P>
Make sure that this
<LI>The directory isn't writable.
At
directory is writable by all users.
your UNIX command prompt, type <TT>chmod 777
$SAVEDIRECTORY</TT>
<LI>The directory you specified isn't really a
directory.
Make
sure that this is indeed a directory
and not a file.
</OL>
</BODY>
</HTML>
ENDOFHTMLCODE
exit;
}
foreach $key (sort {$a <=> $b} $query->param() {
next if ($key =~ /^\s*$/);
next if ($query->param($key) =~ /^\s*$/);
next if ($key !~ /Afile-to-upload-(\d+)$/);
$Number = $1;
if
($query->param($key)
$Filename =
=~
/([^\/\\]+)$/){
$1;
$Filename
s/^\.+//;
$FileHandle = $query->param($key);
if (!$ALLOW INDEX && $Filename =- /Aindex/i)
print header;
#
# <--- i did this
print "Content-type: text/html", "\n\n";
print <<_END OFHTML CODE
<HTML>
<HEAD>
<TITLE>Error: Filename Problem</TITLE>
</HEAD>
<BODY BGCOLOR="#FFFFFF">
104
<Hl>Filename Problem</Hl>
<P>
You attempted to upload a file that
isn't
The system administrator
has decided that you can't upload files that
begin with the word '<B>index</B>'. Please
rename the file on your computer, and try
uploading it again.
properly formatted.
<P>
</BODY>
</HTML>
END OF HTMLCODE
exit;
}
}
else
{
$FILENAMEINQUESTION = $query->param($key);
#
print
print header;
# <--"Content-type: text/html", "\n\n";
print << _ENDOFHTMLCODE_;
i did this
<HTML>
<HEAD>
<TITLE>Error: Filename Problem</TITLE>
</HEAD>
<BODY BGCOLOR="#FFFFFF">
<Hl>Filename Problem</Hl>
<P>
You attempted to upload a file that isn't properly
formatted.
The file in question
is <TT><B>$FILENAMEIN_QUESTION</B></TT>
Please
rename the file on your computer, and
attempt to upload it again.
Files may not have
forward or backward slashes in their
names.
more)
Also,
they may not be prefixed with one
(or
periods.
<P>
</BODY>
</HTML>
ENDOFHTMLCODE
exit;
}
if
(!open(OUTFILE, ">$SAVE DIRECTORY\/$Filename"))
print "Content-type: text/plain\n\n";
print
"-------------------------\n";
print "Error:\n";
print
"-------------------------\n";
print
"File:
print
"-------------------------\n";
$SAVEDIRECTORY\/$Filename\n";
print "There was an error opening the Output File\n";
print "for Writing.\n\n";
print "Make sure that the directory:\n";
print "$SAVEDIRECTORY\n";
print "has been chmodded with the permissions '777'.\n\n";
print "Also, make sure that if your attempting\n";
print "to overwrite an existing file, that the\n";
105
print "existing file is chmodded '666' or better.\n\n";
print "The Error message below should help you
diagnose\n";
print "the problem.\n\n";
print "Error: $!\n";
exit;
}
undef $BytesRead;
undef $Buffer;
while
($Bytes = read($FileHandle,$Buffer,1024))
$BytesRead +=
{
$Bytes;
print OUTFILE $Buffer;
}
push(@Files Written,
$TOTALBYTES +=
"$SAVEDIRECTORY\/$Filename");
$BytesRead;
$Confirmation{$File_Handle} = $BytesRead;
close($FileHandle);
close(OUTFILE);
chmod
(0666,
"$SAVEDIRECTORY\/$Filename");
}
$FILESUPLOADED = scalar(keys(%Confirmation));
if
($TOTAL_BYTES > $MAXIMUMUPLOAD && $MAXIMUMUPLOAD > 0)
foreach $File (@Files Written) {
unlink $File;
{
}
print header;
#
# <--print "Content-type: text/html", "\n\n";
print <<__ENDOFHTMLCODE__;
i did this
<!DOCTYPE HTML PUBLIC "-//W3C//DTD HTML 3.2//EN">
<html lang="EN">
<head>
<TITLE>Error: Limit Reached</TITLE>
<meta http-equiv="content-language" content="en">
<meta http-equiv="content-style-type" content="text/css">
<meta http-equiv="content-script-type" content="text/javascript">
<style type="text/css">
p { font-family : verdana, sans-serif;
text-ident: 5%; margin-top: 30; margin-bottom: 0; margin-left: 5%;
margin-right: 10; }
p.normal { font-family : verdana, san-serif; }
em { font-family : serif, times new roman ; font-size : medium ; fontweight : bold; }
</style>
</head>
<body bgcolor="black" text="#bbbbaa" link="white" alink="yellow"
vlink="gray">
106
<font face="ARIAL,GENEVA,HELVETICA">
<center><table><tr bgcolor=navy><td><font size="+3" color=" #bbbbaa",
Limit
face="ARIAL,GENEVA,HELVETICA">&nbsp;<b>Error:
Reached</b>&nbsp;</font></td></tr></table></center></a>
<HR>
<br>
Sorry,
you have reached your <b>upload limit</b> set by the
system administrator.
You attempted to upload <B>$FILES_UPLOADED</B>
file(s),
totalling
<B>$TOTAL_BYTES</B> bytes.
This exceeds the maximum limit of
<B>$MAXIMUM_UPLOAD</B>
bytes.
<B>None</B> of your file(s)
were successfully saved.
<br>
<HR>
<center><a href="http://deslab.mit.edu/-rdamus/clientupload.html> Back
Home</a></center>
</BODY>
</HTML>
ENDOFHTMLCODE
exit;
}
if
($SUCCESSLOCATION !
print
$query->redirect
/A\s*$/)
{
($SUCCESSLOCATION);
} else {
print header;
"Content-type:
print
#
"\n\n";
text/html",
#
<---
i did
this
print
<<
<!DOCTYPE HTML PUBLIC
<html lang="EN">
<head>
ENDOFHTMLCODE__
"-//W3C//DTD HTML 3.2//EN">
<TITLE>Upload Finished</TITLE>
<meta http-equiv="content-language"
content="en">
content="text/css">
content="text/javascript">
<meta http-equiv="content-style-type"
<meta http-equiv="content-script-type"
<style type="text/css">
{
font-family : verdana, sans-serif;
text-ident: 5%; margin-top: 30; margin-bottom: 0; margin-left: 10%;
margin-right: 10; }
p.normal { font-family : verdana, san-serif; }
em { font-family : serif, times new roman ; font-size : medium ; fontweight : bold; }
</style>
</head>
p
<body
bgcolor="#ffffff"
text="'#000000"
107
link="#003D3A" vlink="#7F2800">
<font
face="ARIAL,GENEVA,HELVETICA">
<center><table><tr bgcolor=yellow><td><font size="+3" color="green",
face= "ARIAL, GENEVA, HELVETICA" >&nbsp; <b>Upload
Finished</b>&nbsp;</font></td></tr></table></center></a>
<HR>
You uploaded <B>$FILES UPLOADED</B> file(s) totalling
<B>$TOTALBYTES</B> total bytes.
Individual file information is listed below:
<ul>
ENDOFHTMLCODE
foreach $key (keys (%Confirmation)) {
print "<li> $key - $Confirmation{$key}
bytes\n";
}
print <<
END OFHTMLCODE__
</ul>
<HR>
<center>
<a href="http://deslab.mit.edu/-rdamus/client
Upload</a>
</center>
</body>
</html>
ENDOFHTMLCODE
exit;
}
# -----------------------------------------------------------------# EOF
108
upload.html">Back to
%%matlab file
to access data from the RIPV VisualizeService
dataFile = 'data.dat';
'info.dat';
inputFile
okFile = 'ok.dat';
while (1)
%%open the data file for reading
%%block until the file is created
dfid = fopen(dataFile, 'r');
disp('lst while')
while(dfid == -1)
dfid = fopen(dataFile, 'r');
%%wait for file to be written to
pause(1);
end
disp('lst scan')
%%the data file will be two columns to begin with
%%if a more complex data file is required, change this line
visData = fscanf(dfid, '%g %g', [2 infl);
%%make the data a column vector
visData = visData';
fclose (dfid);
%%open the info file for reading
%%block until the file is created
fid = fopen(inputFile, 'r');
disp('2nd while')
while(fid == -1)
fid = fopen(inputFile, 'r');
%%wait for file to be written to
pause (1);
end
.jpg file name used for
plot(visData(:,l),visData(:,2));
-djpeg ' outputFile
eval(['print
'.jpg'
)
%%the input file will have the
%-%storing the data output in
outputFile = fscanf(fid,'%s');
fclose(fid);
%%tell the java process that it that the vis is done
oid = fopen(okFile, 'w');
(oid, '1')
fprintf
fclose(oid);
%%delete the appropriate files
%%!del for PC
%%!rm for UNIX
% Running on SGI
strcmp(lower(deblank(computer)),'sgi'),
DelCmd=''rm ';
% We are running in
strcmp(lower(deblank(computer)),'pcwin'),
elseif
W95 or NT
DelCmd='!del ';
strcmp(lower(deblank(computer)), 'lnx86'), % LINUX
elseif
if
DelCmd='
rm
';
109
else
disp([computer
end
'
controls not implemented.']);
%delete the files
eval([DelCmd dataFile])
eval([DelCmd inputFile])
end
110
Appendix E - SETUP.README
SETUP.README
for SUN station,
Irix and Windows
**Table of Contents**
_Prerequisites
_Packages_
_Directory Structure
Locating Source Files_
_Running the Compiler_
_Locating Class Files_
JavaDoc - 1.2.2 and 1.3_
_RMI C_
JARing class files
_JARing comm.jar_
_UnJARing a File(s)_
_Setting CLASSPATH_
Executing the Software_
_Prerequisites_
This code should be run with at least jdkl.2 present on the underlying
system
_Packages_
This is a brief explanation of where things are and how they got there.
The current packages are
The classes have been sorted into packages.
listed in the 'ripv-api' directory.
They are:
Packages
mit.oe.deslab.rdamus.ripv
mit.oe.deslab.rdamus.ripv.assistants
mit.oe.deslab.rdamus.ripv.exceptions
mit.oe.deslab.rdamus.ripv.handlers
mit.oe.deslab.rdamus.ripv.managers
mit.oe.deslab.rdamus.ripv.messages
mit.oe.deslab.rdamus.ripv.panels
mit.oe.deslab.rdamus.ripv.services
mit.oe.deslab.rdamus.ripv.trees
_Directory Structure_
In order for the compiler to understand how to compile the classes, they
must be located in a directory
!You must pay
structure that is indicative of their package name.
attention to where you are storing files
if you want the compiler to find them!
e.g. to find the RIPVServer now, you would
<-- for a source file
import mit.oe.deslab.rdamus.ripv.RIPVServer;
or
reference the RIPVServer like so at the command line:
\mit\oe\deslab\rdamus\ripv\RIPVServer.java
takes the place of the '.'
the command line
_Locating Source Files_
Steps to locating the source files:
111
<-- notice how the '\'
in the package name
in
This is
The source files are now located in the 'src' directory.
relative to the current version directory:
e.g. current version 2.7.6
<--entry point for location of source files.
e:\thesis\ver2.7.6\src
Thus, RIPVServer.java exists at:
e:\thesis\ver2.7.6\src\mit\oe\deslab\rdamus\ripv\RIPVServer.java
_Running the Compiler_
To run the compiler on the files, the only thing that *has* to be set is
the PATH variable.
e:\thesis\ver2.7.6\>set PATH=c:\jdkl.3\bin <-- now you can use java,
javac, rmic, etc...
Then to compile a particular file, you have to give the fully qualified
directory name with respect
to the current directory:
E:\thesis\ver2.7.6\>javac -verbose -sourcepath src -classpath
c:\jdkl.3\l <CONTINUED ON NEXT LINE, NO SPACE>
ib\comm.jar src\mit\oe\deslab\rdamus\ripv\trees\*.java -d classes
The above example will compile all of the '.java'
mit.oe.deslab.rdamus.ripv.trees package.
files in the
the -verbose allows for easy debugging of where the compiler is missing
(or getting) your files from
the -sourcepath is fed the top level of the directory where the packaged
source files are located
note: because 'src' is given at the command line, it is with
respect to the current directory.
This means there must be a directory called e:\thesis\ver2.7.6\src
the -classpath is pointing to the javax.comm.jar file which contains the
appropriate files for
doing the low level serial port handling.
the -d means to store the '.class' file in the directory called
'classes'
note: because '-d classes' is given at the command line, it is
with respect to the current directory
This means there must be a directory called
e:\thesis\ver2.7.6\classes
Locating Class Files_
Steps to locating the class files
This is
The class files are now located in the 'classes' directory.
relative to the current version directory:
e.g. current version 2.7.6
<--entry point for location of class files.
e:\thesis\ver2.7.6\classes
Thus, RIPVServer.class exists at:
e:\thesis\ver2.7.6\classes\mit\oe\deslab\rdamus\ripv\RIPVServer.class
_JavaDoc -
1.2.2 and 1.3_
In order to create documentation, you can either use the whole package
or just the source files
112
.;c:\jdkl.3\src.jar
-
-sourcepath
E:\thesis\ver2.7.6\src>javadoc
classpath c:
\jdkl.3\lib\comm.jar -d e:\thesis\ver2.7.6\ripvapi
mit.oe.deslab.rdamus.ripv mi
t.oe.deslab.rdamus.ripv.services mit.oe.deslab.rdamus.ripv.managers
mit.oe.desla
b.rdamus.ripv.handlers mit.oe.deslab.rdamus.ripv.trees
mit.oe.deslab.rdamus.ripv
.exceptions mit.oe.deslab.rdamus.ripv.messages
mit.oe.deslab.rdamus.ripv.panels
mit.oe.deslab.rdamus.ripv.assistants
_RMIC_
The 'rmic' command is given at the command line with a fully qualfied
package name of a class as an argument.
The tool will automatically generate the _Stub and _Skel and place them
in the directory that the class file
you are rmicompiling.
It appears that wildcars like
used for rmicompiling all
a particular package
'*'
*cannot* be
the classes in
OK
E:\thesis\ver2.7.6\classes>rmic mit.oe.deslab.rdamus.ripv.RIPVServer
BAD
E:\thesis\ver2.7.6\classes>rmic mit.oe.deslab.rdamus.ripv.services.*
_JARing class files_
The 'jar' tool is used at the top level of the directory hierarchy that
contains the
classes within it.
E:\thesis\ver2.7.6\classes>jar
cf ripv.jar
*
The command:
will cause a jar file to be named 'ripv.jar'
within this jar file will be all of the .class files, in the correct
directory structure as defined in the subdirectory structure of
e:\thesis\ver2.7.6\classes.
Since the fully qualified name of a class file maps to the directory
structure,
then the jar file
should mimic this in its containment
hierarchy
observe, the contents of ripv.jar:
11-Apr-2001 14:04:16
6035
-rw-rw-rwmit/oe/deslab/rdamus/ripv/services/DataVisServer.class
14:04:16
11-Apr-2001
7441
-rw-rw-rwmit/oe/deslab/rdamus/ripv/services/DatabaseServer.class
5248 11-Apr-2001 14:04:16
-rw-rw-rwmit/oe/deslab/rdamus/ripv/services/SerialPortServer.class
15:33:14
5522
11-Apr-2001
-rw-rw-rwmit/oe/deslab/rdamus/ripv/services/DatabaseServerStub.class
15:33:14
11-Apr-2001
3330
-rw-rw-rwmit/oe/deslab/rdamus/ripv/services/DatabaseServerSkel.class
5524 11-Apr-2001 15:33:24
-rw-rw-rwmit/oe/deslab/rdamus/ripv/services/SerialPortServerStub.class
15:33:24
3334
11-Apr-2001
-rw-rw-rwmit/oe/deslab/rdamus/ripv/services/SerialPortServerSkel.class
113
5521
-rw-rw-rw-
15:33:34
11-Apr-2001
mit/oe/deslab/rdamus/ripv/services/DataVisServerStub.class
11-Apr-2001 15:33:36
3328
-rw-rw-rwmit/oe/deslab/rdamus/ripv/services/DataVisServerSkel.class
_JARing comm.jar_
*
to the current
from c:\jdkl.3\lib
Copy the comm.jar file
directory.
The
Proceed to extract the jar file into the current directory.
contents of the jar file will create a directory hierarchy.
Then, from the same directory that includes the subdirectories
relating to the RIPV, type:
cf ripv.jar
e:\thesis\ver2.7.6\classes>jar
ripv.jar,
file,
will create a jar
this
necessary files for running the code.
that contains all
of the
_UnJARing a File(s)_
from a JAR file
You can extract file(s)
C:\>jar xf
jar-file
by using the
'xf' option:
archived-file(s)
Please see
http://developer. java. sun. com/developer/Books/JAR/basics/index. html
for more information.
_Setting CLASSPATH
The CLASSPATH variable can be set on a Unix machine running csh
like so:
this because you have .cshrc file)
(know
setenv CLASSPATH <value>
or
set classpath=($classpath <value>)
_Executing the Software_
The directory
JAR file.
The software comes bundled in the ripv.jar
The way you execute the
is described above.
file
structure of the jar
I
class files depends on what implementation of java you are running.
recommend downloading the Java 2 SDK, Standard Edition from Sun:
It is about 30MB in size and installs
http://java.sun.com/j2se/1.3.
The Java Runtime
the latest version of the Java Virtual Machine.
Environment can be installed by itself, however, and only takes up -5MB
It is located at http://java.sun.com/j2se/1.3/jre.
of disk space.
There are minor subtleties in how to execute the RIPV software based on
your implementation, outlined below.
IMPORTANT:
In order to use the SerialPortServer's serial port interfacing
on the system you
the java.comm package must be installed
capabilities,
This package is small (-270K) and is
are running the software on.
obtained from http://java.sun.com/products/javacomm.
Steps:
Install
1.
the implementation of Java
114
(either
JDK or plain JRE)
2.
Install the appropriate files from the java.comm package in the
Read the platform-specific.html file that
appropriate directories.
comes in the javadocs/ directory of the java.comm package for where to
DO NOT forget to
install the appropriate jar, dll and properties file.
install the javax.comm.properties file or the SerialPortServer will NOT
find any serial ports on your machine!!
3.
Make sure that the PATH variable points to the location of where
the 'java' command is:
if you are running the Java 2 SDK, version 1.3 then type the following
command (Windows, see above for how to set environment variables in
Unix):
C:\>set PATH=c:\jdkl.3\bin
for the JRE installation:
C:\>set PATH=c:\<JRE LOCATION>\jre\bin
4.
Make sure that the CLASSPATH variable points to the location where
This can be done in two ways:
the ripv.jar file is.
set the CLASSPATH statically, using the directory where you have stored
the ripv.jar file (in this example, in c:\ripv\classes):
C:\>set CLASSPATH=c:\ripv\classes\ripv.jar
or dynamically at run time using the -classpath option:
C:\>java -classpath c:\ripv\classes\ripv.jar <RIPV class name> <params>
Java will look for the files to run the software wherever it has been
By default, the classpath references the
told by the classpath.
current directory if a classpath is not set as well as a default set of
For more information, see
directories.
http://java.sun.com/products/jdk/1.2/docs/tooldocs/win32/classpath.html
This feature should be enabled on computers
4.
Start the rmiregistry.
It is not needed for a
wishing to run the RIPVServer or RIPVServices.
If you do not
machine connecting to the RIPVClient via a Web browser.
start the rmiregistry, the RMI features of the RIPV system will not
function.
5. Run the appropriate software; be sure to set the
java.security.policy file (using the -D command line option) with the
If you did not create a permit
permit file that you have created.
file, a default permit file can be extracted from the ripv.jar file.
The fully
See the above section on UnJARing for how to do this.
qualified name of a class is used for execution.
In general, a java program is run by executing the .class file
Invoking the 'java' command at the
generated by the 'javac' compiler.
command prompt, after setting the appropriate variables to tell the JVM
where to look for the class files that are associated with this file,
will cause the application to run.
RIPVServer
115
The RIPVServer is invoked with 1 argument parameter, the port on which
to listen for requests from the RIPVClient.
By convention, this port
is 4444.
C:\>java -Djava.security.policy=permit mit.oe.deslab.rdamus.RIPVServer
4444
RIPVServices
The RIPVServices must know the location of the RIPVServer so they can
This argument will always be passed on the
register themselves.
command line.
For certain applications like the DatabaseServer,
pertinent information about JDBC drivers is also passed to the
application in addition to the RIPVServer's location.
SerialPortServer
C:\> java -Djava. security.policy=permit
mit.oe.deslab.rdamus.ripv.services.SerialPortServer
//ripvserver.location
DataVisServer
C:\> java -Djava.security.policy=permit
mit.oe.deslab.rdamus.ripv.services.DataVisServer //ripvserver.location
DatabaseServer
C:\> java -Djava.security.policy=permit
mit.oe.deslab.rdamus.ripv.services.DatabaseServer
<//ripvserver.location [<driver> <url>]
The last two parameters are optional and can be neglected only if you
wish to use the Cloudscape database that comes with the J2 Enterprise
Edition.
For more details about this Relational Database that uses
SQL, see:
http://developer.java.sun.com/developer/onlineTraining/EJBIntro/exercis
es/DatabaseCreation/index.html
RIPVClient
Point your browser to the appropriate location of where the RIPV system
For example:
is being hosted.
http://deslab.mit.edu/ripv/RIPVClient.html
116
Appendix F - Class Hierarchy
Package Hierarchies:
mit.oe.deslab.rdamus.ripv, mit.oe.deslab.rdamus.ripv.assistants,
mit.oe.deslab.rdamus.ripv.exceptions, mit.oe.deslab.rdamus.ripv.handlers,
mit.oe.deslab.rdamus.ripv.managers, mit.oe.deslab.rdamus.ripv.messages,
mit.oe.deslab.rdamus.ripv.panels, mit.oe.deslab.rdamus.ripv.services,
mit.oe.deslab.rdanus.ripv.trees
Class Hierarchy
o
class java.lang.Object
o
class java. awt. Component (implements java. awt. image.ImageObserver,
java.awt.MenuContainer, java.io.Serializable)
o
class java.awt.Container
o
class javax.swing.JComponent (implements java.io.Serializable)
o
o
class javax.swing.JPanel (implements
javax.accessibility.Accessible)
o
class mit.oe.deslab.rdamus.ripv.panels.DatabasePaneI
o
class mit.oe.deslab.rdamus.ripv.trees.FileTree
o
class mit.oe.deslab.rdamus.ripv.panels.ImagePanel
o
class mit.oe.deslab.rdamus.ripv.trees.MailboxTree
o
class mit. oe. deslab.rdamus.ripv.trees. ServiceTree
class java.awt.Panel (implements javax.accessibility.Accessible)
o
class java.applet.Applet
o
class javax.swing.JApplet (implements
javax.accessibility.Accessible,
javax.swing.RootPaneContainer)
o
class mit.oe.deslab.rdamus.ripv.RIPVClient
o
class mit.oe.deslab.rdamus.ripv.CRCCCIT16
o
class mit.oe.deslab.rdamus.ripv.Footer (implements java.io. Serializable)
o
class mit.oe.deslab.rdamus.ripv.handlers.Handler (implements
117
java.lang.Runnable)
o
o
class mit.oe. deslab.rdamus.ripv.handlers. ClientSocketHlandler
class mit.oe. deslab.rdamus.ripv.handlers. SerialPortHandler (implements
j avax.comm. SerialPortEventListener)
o
class mit.oe. deslab.rdamus.ripv.handlers. SocketHandler
java.io.Serializable)
o
class mit.oe. deslab.rdamus.ripv.Header (implements
o
class mit.oe.deslab.rdamus.ripv.idBadge (implements java.io.Serializable)
o
class mit.oe.deslab.rdamus.ripv.MailBox (implements java.io.Serializable)
o
class mit.oe.deslab.rdamus.ripv.MailBoxKey (implements java.io.Serializable)
o
class mit.oe.deslab.rdamus.ripv.Message (implements j ava.io.Serializable)
o
class mit.oe.deslab.rdamus.ripv.messages.IncomingServerMessage
o
class mit.oe.deslab.rdamus.ripv.messages.IncomingServiceMessage
o
class mit.oe.deslab.rdamus.ripv.messages.Outgoin
o
class mit.oe.deslab.rdamus.ripv.messages.Outgoin2ServiceMessa2e
gServerMessage
o
class mit.oe.deslab.rdamus.ripv.ObiectFIFO (implements java.io.Serializable)
o
class mit.oe.deslab.rdamus.ripv.OutputStreamFlag
o
class mit.oe.deslab.rdamus.ripv.PostOffice
o
class j ava.rmi. server.RemoteObj ect (implements j ava.rmi.Remote,
o
java.io.Serializable)
class java.rmi.server.RemoteServer
o
class java.rmi.server.UnicastRemoteObject
o
class mit.oe.deslab.rdamus.ripv.RIPVServer (implements
mit. oe.deslab.rdamus.ripv. GenericRM IInterface,
java.lang.Runnable)
o
class mit.oe.deslab.rdamus.ripv.RIPVService
o
o
class mit.oe.deslab.rdamus.ripv.services.DatabaseServer
(implements
mit.oe.deslab.rdamus.ripv.GenericRMlInterface)
o
class mit.oe.deslab.rdamus.ripv.services.DataVisServer
(implements
mit.oe.deslab.rdamus.ripv.GenericRMlInterface)
o
class
mit.oe.deslab.rdamus.ripv.services.SerialPortServer
(implements
mit.oe.deslab.rdamus.ripv.GenericRMlInterface)
class mit.oe.deslab.rdamus.ripv.ServiceReference (implements
mit.oe.deslab.rdamus.ripv.GenericRMlInterface)
o
class mit.oe.deslab.rdamus.ripv.ServiceDescriptor (implements
o
class mit.oe.deslab.rdamus.ripv.SwinyWorker
118
java.io.Serializable)
o
class java.lang.Thread (implements
o
class mit.oe.deslab.rdamus.ripv.assistants.InboxAssistantThread
o
class mit.oe.deslab.rdamus.ripv.managers.Manager
o
o
java.lang.Runnable)
o
class mit.oe.deslab.rdamus.ripv.managers.GuiMana2er (implements
mit.oe.deslab.rdamus.ripv.GuiInterface)
o
class mit.oe.deslab.rdamus.ripv.managers.TaskManager
class mit.oe.deslab.rdamus.ripv.assistants.OutboxAssistantThread
class java.lang.Throwable (implements java.io.Serializable)
o
class java.lang.Exception
o
class mit.oe.deslab.rdamus.ripv.exceptions. HandlerException
Interface Hierarchy
o
interface mit.oe.deslab.rdamus.ripv.Guilnterface
o
interface java.rmi.Remote
0
interface mit.oe.deslab.rdamus.ripv.GenericRMlinterface
119
References
ARION: http://dlforum.extemal.forth.gr: 8080/
AUSI: http://www.ausi.org
M. Bender, R. Klein, A. Disch, A. Ebert. A Functional Framework for Web-Based
Information Visualization Systems. IEEE Transactions on Visualization and Computer
Graphics, vol. 6, no. 1, Jan-Mar 2000.
M. Baker, B. Carpenter. MPJ: A Proposed Java Message Passing API and Environment
for High Performance Computing. IPDPS 2000 Workshops, LNCS 1800, 2000.
Beaufort Sea 1: http://209.58.177.220/articles/oct94/searobot.html
Beaufort Sea 2: http://auvlab.mit.edu/history.html
J.G. Bellingham, J.J. Leonard, J. Vaganay, C. Goudey, D. Atwood, T. Consi, J. Bales, H.
Schmidt, C. Chryssostomidis. AUV Operations in the arctic. Proceedings of the Sea Ice
Mechanics and Arctic Modeling Workshop, Anchorage, Alaska, April 1995.
J.G. Bellingham, T.R. Consi. State Configured Layered Control. Proceedings of Mobile
Robots for Subsea Environments. International Advanced Robotics Programme.
Monterrey, CA, 1991.
J. G. Bellingham, C. A. Goudey, T. R. Consi, J. W. Bales, D. K. Atwood, J. J. Leonard,
C. Chryssostomidis. A Second Generation Survey AUV. Proceedings of the IEEE
Symposium on Autonomous Underwater Vehicle Technology (AUV'94), July 1994.
U. D. Black. Data Communications and Distributed Networks. New Jersey: Prentice
Hall, 1987.
L. Boszormenyi, A. Wickner, H. Wolf. Performance Evaluation of Object Oriented
Middleware. Euro-Par'99, LNCS 1685 (258-261), 1999.
R. Brooks. Cambrian Intelligence: The Early History of the New Al. Cambridge: MIT
Press, 1999.
D. P. Brutzman, PhD Dissertation, "A Virtual World for an Autonomous Underwater
Vehicle", Naval Postgraduate School, December 1994.
M. Campione, K. Walrath. The Java Tutorial Second Edition. Massachusetts: AddisonWesley, 1999.
J. A. Capitovic. Performance Limitations in Underwater Acoustic Telemetry. IEEE
Journal of Oceanic Engineering, vol 15, no 3, July 1990.
A. G. Chappell, R. J. Komerska. An Environment for High-Level Multiple AUV
Simulation and Communication. Autonomous Undersea Systems Institute, presented at
120
Collaboratingand Leveraging OuterSpace and Undersea Technologies (CLOUT),
NOAA/NASA Workshop, August 2000. http://www.ausi.org.
P. Ciancarini, R. Tolksdorf, F. Vitali, D. Rossi, A. Knoche. Redesigning the Web: From
Passive Pages to Coordinated Agents in PageSpaces. Proceedings of 3rd IEEE
International Symposium on Autonomous Decentralized Systems (ISADS), 1997.
D.E. Comer, D. L. Stevens. Internetworking with TCP/IP, Client-Server Programming
and Applications, Volume III. New Jersey: Prentice Hall, 1996.
T. B. Curtin, J. G. Bellingham, J. Capitovic, D. Webb. Autonomous Ocean Sampling
Networks. Oceanography, vol. 6, no. 3, 1993.
R. Elmasri, S.B. Navathe. Fundamentals of Database Systems: Second Edition.
California: Addison-Wesley, 1994.
N. C. Forrester, R. P. Stokey, C von A., B. G. Allen, R.G. Goldsborough, M. J. Purcell,
T. C. Austin. The LEO-15 Long Term Ecosystem Observatory: Design and Installation.
Proceedings from the IEEE Oceans '97 Conference, Vol. II, Halifax, Nova Scotia,
Canada, 1997.
Freewave: http://www.freewave.com/Product Information/900 mhz.htm
P. Horowitz, W. Hill. The Art of Electronics - Second Edition. United Kingdom:
Cambridge University Press, 1998.
C.S. Horstmann, G. Cornell. Core Java 2: Volume I-Fundamentals. California: Sun
Microsystems Press, A Prentice Hall Title, 1999.
M. Hughes, M. Shoffner, D. Hamner. Java Network Programming, 2 "d Edition.
Connecticut: Manning Publications Co, 1999.
P. Hyde. Java Thread Programming. Indiana: SAMS, 1999.
Java Beans intro:
http://developer.java.sun.com/developer/onlineTraining/EJBIntro/EJBIntro.html
Java SUN: http://java.sun.com
Java Virtual Machine Specification: http://www.javasoft.com/docs/books/vmspec/2ndedition/html/VMSpecTOC.doc.html
Java Virtual Machine for Microsoft http://www.microsoft.com/java/default.htm
Java Virtual Machine for Netscape http://home.netscape.com/computing/download/
G. Jones, PhD Thesis, "Scheduling With Temporal and Logical Constraints", URI
Applied Mathematical Sciences, 1998.
121
J. H. Kim, Masters Thesis, "Remote Monitoring and Control of Underwater Vehicles",
MIT Dept of Ocean Engineering, February 1997.
J. H. Kim, B. A. Moran, J. J. Leonard, J. G. Bellingham, S. T. Tuohy. Experiments in
Remote Monitoring and Control of Autonomous Underwater Vehicles. In proceedings of
IEEE Oceans, pages 411-416, Ft. Lauderdale, Florida, September, 1996.
H.Kopetz. Real-time systems : Design Principles for Distributed Embedded
Applications. Boston : Kluwer Academic Publishers, 1997.
S. Lalis and A. Karipidis. An Open Market-Based Framework for Distributed Computing
over the Internet. International Workshop on Grid Computing, in conjunction with the
7th International Conference on High Performance Computing (HiPC '2000), December
2000, Bangalore, India
P. Malanotte-Rizzoli. Oceanographic Data Assimilation in the 1990s: Overview,
Motivation and Purpose. Naval Research Reviews. Vol 51, No.2, 1999.
K.P. Mihanetzis, Masters Thesis, "Towards a Distributed Information System For Coastal
Zone Management", MIT Dept of Ocean Engineering, June 1999.
J.C. Moon, J.H. Park, S.J. Kang. An Event Channel-Based Embedded Software
Architecture for Developing Telemetric and Teleoperation Systems on the WWW. 1999
IEEE
MOOS: http://www.mbari.org/rd/projects/current_projects.html#MOOS
G. J. Moshos. Data Communications - Principles & Problems. New York: West
Publishing Co., 1989.
NASA: http://ranier.oact.hq.nasa.gov/teleroboticspage/telerobotics.shtm
E. A. Nichols, J. C. Nichols, K. R. Musson. Data Communications for MicroComputers.
New York:McGraw Hill Book Co. 1982.
Onset:
http://www.onsetcomputer.com/Products/ProductPages/Tattletale-pages/TT8.html
N. M. Patrikalakis, S.L. Abrams, J.G. Bellingham, W. Cho, K.P. Mihanetzis, A.R.
Robinson, H. Schmidt, P.C.H Wariyapola. The Digital Ocean. Invited paper in
Proceedings of Computer Graphics International, GCI'2000, pp. 45-53. Geneva,
Switzerland, June 2000. IEEE Computer Society Press. Los Alamitos, CA: IEEE, 2000.
N.M. Patrikalakis, P. J. Fourtier, Y. E. Ioannidis, C. N. Nikolaou, A. R. Robinson, J. R.
Rossignac, A. Vinacua, S. L. Abrams. Distributed Information and Computation in
Scientific and Engineering Environments. D-Lib Magazine, The Magazine of Digital
Library Research, April 1999.
122
F. Plasil, M. Stal. An architectural view of distributed objects and components in
CORBA, Java RMI, and COM/DCOM. Software-Concepts & Tools, vol 19(14-28),
1998.
Persistor: http://www.persistor.com
POSEIDON: http://czms.mit.edu/poseidon
R. Rajkumar, M. Gagliardi, L. Sha. The Real-Time Publisher/Subscriber Inter-Process
Communication Model for Distributed Real Time Systems: Design and Implementation.
IEEE 1995.
A. R. Robinson, J. G. Bellingham, C. Chryssostomidis, T. D. Dickey, D. V. Holliday, E.
Levine, N. M. Patrikalakis, D. L. Porter, B. J. Rothschild, H. Schmidt, K. Sherman, D. K.
Atwood. Realtime Forecasting of the Multiscale, Interdisciplinary Coastal Ocean with
the Littoral Ocean Observing and Predicting System (LOOPS). Abstract of Lecture at
AGU Ocean Sciences meeting, January 2000.
A.R. Robinson, S.M. Glenn. Adaptive Sampling for Ocean Forecasting. Naval Research
Reviews. Vol 51, No.2, 1999
H. Schmidt, J. G. Bellingham, M. Johnson, D. Herold, D. M. Farmer, R. Pawlowicz.
Real-Time Frontal Mapping with AUVs in a Coastal Environment. Oceans 1996.
P. Simonetti. Low-Cost, Endurance Ocean Profiler. Sea Technology. February 1998.
SQL: http://www.sql.org
R. Sunderraman. Oracle Programming: A Primer. Massachusetts: AddisonWesley,
1999.
THETIS: http://www.ics.forth.gr/pleiades/THETIS/thetis.html
R. M. Turner, E.H. Turner, D.R. Blidberg. Organization and Reorganization of
Autonomous Ocean Sampling Networks. 1996 IEEE
M. Visbeck. Labrador Sea experiment home page,
http://www.ldeo.columbia.edu/~visbeck/labsea, 1994-present.
P. C. Wariyapola, MS Thesis, "Towards an Ontology and Metadata Structure for a
Distributed Information System for Coastal Zone Management", MIT Dept of Ocean
Engineering, September 1999.
J. Yoon, MEng Thesis, "A Virtual Environment for the Visualization of Geophysical
Ocean Data", MIT Dept of Electrical Engineering, August 1994.
123