SPECKLE A OPTICAL OF THE REQUIREMENTS FOR THE
advertisement

DECORRELATION TIME OF SPECKLE TARGETS OBSERVED
WITH A
HETERODYNE-RECEPTION OPTICAL RADAR
by
SUN TONG LAU
B.S.E.E., State University of New York at Buffalo
(1980)
SUBMITTED IN PARTIAL FULFILLMENT
OF THE REQUIREMENTS FOR THE
MASTER OF SCIENCE
at the
MASSACHUSETTS INSTITUTE OF TECHNOLOGY
June 1982
............
Department of Electrical Engineering and Computer Science
June 30, 1982
Signature of Author...
Certified by......
//e'ffrey 1. Shapiro
V Thesis Supervisor
Accepted b .
Arthur C. Sm th
Chairman, Departmental Committee on Theses
Archives
OF TECHNOLOGY
OCT 20 1982
LIBRARIES
-2-
DECORRELATION TIME OF SPECKLE TARGETS OBSERVED
WITH A
HETERODYNE-RECEPTION OPTICAL RADAR
by
SUN TONG LAU
Submitted to the Department of Electrical Engineering & Computer Science
on June 30, 1980 in partial fulfillment of the requirements for the
Degree of Master of Science.
ABSTRACT
Coherent laser radars provide new technology for a variety of target
detection and imaging scenarios. However, poor-image quality is caused by
laser speckle resulting from the shortness of the laser wavelength compared
to the surface roughness of typical targets. Serious signal return
fluctuations are found whose time dependence is poorly understood. The
purpose of this thesis is to assess the time dependence of speckle target
radar returns. A data processing technique is developed to investigate the
correlation property of the laser radar data. Accordingly, useful insights
concerned with the causes of the return fluctuations are obtained. A
mathematical model, which incorporates random radar and target tilts, is
then constructed to describe the decorrelation process of the radar returns.
Comparison of experimental results and theoretical results shows that
atmospheric turbulence and wind are the factors which control the decorrelation process.
Thesis Supervisor:
Title:
Jeffrey H.
Shapiro
Associate Professor of Electrical Engineering
-3-
ACKNOWLEDGMENTS
I would like to thank my graduate counselor and thesis advisor
Professor J. H. Shapiro for his patient guidance and invaluable advice
during my studies at M.I.T. and the course of my thesis research.
It
has been my pleasure to work with him and learn so much from him.
I also wish to acknowledge all members of the Optical Propagation
and Communication research group at M.I.T. especially Dr. D. M. Papurt
and T. T. Nguyen.
Valuable suggestions from them have added to this work.
Thanks are also due to members of the Opto-Radar Systems group
at M.I.T. Lincoln Laboratory.
R. J. Hull, T. M. Quist and R. J. Keyes
should be mentioned for their help in providing me with the radar data
and computer facilities for this research.
Financial support by the U.S. Army Research Office, Contract
DAAG29-80-K-0022 is gratefully appreciated.
Elain Aufiero, Donna Gale and Deborah Lauricella deserve mention
for their excellent typing.
-4-
To my mo.ZheL,
6o~'i heA etc.oLUWgQJ1Welt an'idLove.
-5-
TABLE OF CONTENTS
Page
2
ABSTRACT..........................................................
ACKNOWLEDGEMENTS..................................................
3
TABLE OF CONTENTS.................................................
5
LIST OF FIGURES...................................................
7
LIST OF TABLES....................................................
9
CHAPTER I.
INTRODUCTION.......................................
10
I.l.
Laser Radar Configuration....................
10
1.2.
Intensity Fluctuation of Speckle TargetsProblem Statement............................
11
Thesis Overview..............................
16
STATISTICAL PROPERTIES OF THE INTENSITY
FLUCTUATIONS.......................................
18
1.3.
Chapter II.
II.l.
11.2.
11.3.
Scintillation-sensor/Radar
Data Description.............................
18
II.1.1
Atmospheric Turbulence...............
18
11.1.2
Scintillation Measurements...........
19
11.1.3
Staring-Mode IRAR Data...............
21
Correlation Coefficient Function (CCF)
Estimation...................................
21
11.2.1
CCF Estimation Procedure.............
22
11.2.2
CCFs in Various Turbulence
Levels...............................
24
Chi-squared Goodness-of-fit Test.............
35
-6-
CHAPTER III.
MATHEMATICAL MODELING............
Page
44
Theoretical Model.........
44
III.1.1
Model Derivation.
45
111.1.2
Model Interpretat on
54
III.1
Model Verification........
67
DISCUSSION.......................
84
111.2
CHAPTER IV.
REFERENCES.... ......................... o......
87
-7-
LIST OF FIGURES
Figure
Page
1
Radar Block Diagram...................................... 12
2
Formation of a Speckle Pattern........................... 14
3
Autocorrelation Function of the Gate Function, g(t)...... 25
4
Estimated Autocovariance Function of x(t)................ 26
5
Estimated Correlation Coefficient Function of y(t)....... 27
6
CCF of Data Set 1........................................ 28
7
CCF of Data Set 2.........
8
CCF of Data Set 3......... ............................... 30
9
CCF of Data Set 4.......
10
CCF of Data Set 5.........
11
CCF of Data Set 6......... . ...............
33
12
Histogram of Target-Return Intensities vs. Expected
Frequencies of Data Set 1..
38
13
Expected
Histogram of Target-Return
.
Frequencies of Data Set 2.. ...........
Intensities vs.
39
14
Histogram of Target-Return Intensities vs. Expected
Frequencies of Data Set 3.. Intensities
...............vs. ...............
40
15
Histogram of Target-Return ...............
Frequencies of Data Set 4..
Intensities vs.
Histogram of Target-Return ...............
Frequencies of Data Set 5..
Intensities vs.
Histogram of Target-Return ...............
Frequencies of Data Set 6..
16
17
29
31
..
I. ..
. ..
..
..
..
...
..
. ..
. ..
Expected
.............
......
.
32
41
Expected
............... 42
43
46
18
Radar Configuration........
19
Theoretical CCFs with Only Radar Tilt Active............. 57
-8-
Page
Figure
20
Theoretical CCFs with Only Target Tilt Active............
58
21
Theoretical CCFs with both Radar and Target Tilts
Active,R > 1 and a; > G .. ......... .....................
60
22
Theoretical CCFs with both Radar and Target Tilts
Active,R > 1 and a0 = a . ...............................
61
23
Theoretical CCFs with both Radar and Target Tilts
Active, R > l and au < a. ...............................
62
24
Theoretical CCFs with both Radar and Target Tilts
Active, R < 1 and a < a .......... ............
T
e.......
64
25
Theoretical CCFs with both Radar and Target Tilts
Active, R < 1 and a; = a . .......... .......... o...........
65
26
Theoretical CCFs with both Radar and Target Tilts
Active, R < 1 and a; > a'.
66
27
Theoretical CCF vs. Experimental CCF of
Data Set 1.
71
28
Theoretical CCF vs. Experimental CCF of
Data Set 2.
72
29
Theoretical CCF vs. Experimental
CCF of
Data Set 3.
73
30
Theoretical CCF vs. Experimental
CCF of Data Set 4.
74
31
Theoretical CCF vs. Experimental
CCF of Data Set 5.
75
32
Theoretical CCF vs. Experimental
CCF of Data Set 6.
76
33
Best CCF Fit of Data Set 1......
77
34
Best CCF Fit of Data Set 2......
78
35
Best CCF Fit of Data Set 3.......
79
36
Best CCF Fit
37
Best CCF Fit of Data Set 5.......
81
38
Best CCF Fit of Data Set 6......
82
of Data Set 4......
80
-9-
LIST OF TABLES
Table
Page
1.
Scintillation Measurement Results.................. 20
2.
Decorrelation Data................................. 34
3.
Parameters for Figures 21, 22, 23 .................. 63
4.
Parameters for Figures 24, 25, 26 .................. 67
5.
Estimated ae and -
6.
Parameter Values for Best CCF Fit.................. 83
from Turbulence Theory......... 69
-10CHAPTER I
INTRODUCTION
Heterodyne-reception optical radars using the 10.6 -rm wavelength
CO2 laser provide new technical options for a variety of target detection and
imaging scenarios [1].
However, the much shorter wavelength of laser radars
as compared to microwave radars implies new problems as well as enhanced
capabilities [2].
One of the problems is the poor image quality which is
caused by laser speckle [3], resulting from the shortness of the laser wavelength compared to the surface roughness of typical targets.
Serious signal
return fluctuations are found whose time dependence is poorly understood.
This
research will be addressed to assessing the time dependence of speckle target
radar data analysis and theoretical modeling.
The remainder of the introduction
includes a description of the optical radar we are using, a problem statement,
and an overview of the thesis organization.
I.1: Laser Radar Configuration
An ongoing program aimed at developing an Infrared Airborne Radar (IRAR)
is underway at the M.I.T. Lincoln Laboratory [4] [5].
A radar testbed system
has been constructed as part of this program which we will refer to as IRAR,
although it is ground mounted.
IRAR.
Data for this thesis has been obtained using
This laser radar uses a one-dimensional,
twelve-element HqCdTe hetero-
dyne detector array, a transmit/receive telescope of 13 cm
aperture, and a
10 W CO2, 10.6 um laser, which is operated in pulsed mode.
Presently, we are
interested in the radar's performance over target ranges from one to ten
-11-
kilometers.
More radar system descriptions can be obtained in [2] [4] [5].
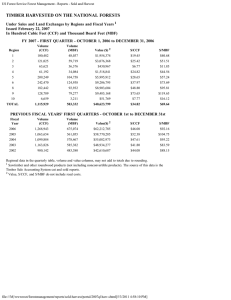
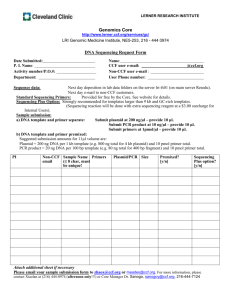
In order to set up subsequent statistical system analysis, the basic
structure of a heterodyne-reception optical radar is explained.
represented by the block diagram of Figure 1 [5].
It can be
The laser radar sends out
a series of pulses and illuminates a target located a certain distance away.
After passing through the exit optics in Figure 1, the laser beam propagates
through the atmosphere and the illuminator beam is reflected back by the target.
The reflected beam then comes back through the atmosphere and the entrance
optics.
Finally, the received beam is combined with the strong local oscillator
beam operating at a frequency offset v IF on the surface of the photodetector.
In target-detection applications, the IF signal is to be used to estimate the
average target reflection strength which is compared with a threshold value to
determine the presence or absence of a target.
In performinq imaging, the
radar first scans the target and collects arrays of echo signal returns in
order to form a complete picture.
Then, computer enhancement of the resulting
image follows, after the estimation of the average target reflection strength
is finished.
1.2:
Intensity Fluctuation of Speckle Targets - Problem Statement
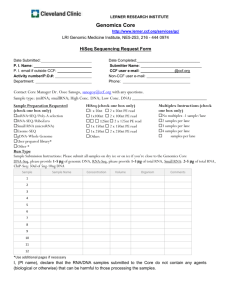
The random intensity distribution that we call a speckle pattern is
formed when fairly coherent light is either reflected from a rough surface
or propagates through a medium with random refractive index fluctuations [3].
Since the wavelength of the CO2 laser is 10.6 -pm, many target surfaces are
rough on the order of a wavelength.
As a result, the surfaces scatter the
light diffusely and form a speckle pattern.
The observation at a distant point
is simply the summation of the light from a large number of randomly phased
TRANSMITTER
BEAM
TRANSMITTER
LASER
EXIT
OPTICS
BEAM
COMBINER
PHOTODETECTOR
ILLUMINATOR
BEAM
ATMOSPHERIC
PROPAGATION PATH
RECEIVED
BEAM
EN T RANCE
OP TICS
REFLECTED
BEAM
A TMOSPHE RIC
PROPAGA TION PA T H
PHOTOCURRENT
L.O. BEA M
IF
LOCAL
PROCESSING
OSCIL LA TOR
TARGET
IMAGE
PROCESSING
Figure 1: Radar block diagram.
T
G
-13-
scatterers as in Figure 2. Obviously, if the point of observation or the
precise position of the target being illuminated is changed, the signal return
intensity will change at the same time.
Statistically, the speckle fluctuation
obeys an exponential probability distribution
p(I) =
exp
[-
u(I)
where I = signal returns intensity
<I> = ensemble average intensity.
It can be seen that speckle in infrared radar is an analogy to the
Rayleigh cross-section fluctuations in a conventional radar.
Intensity fluc-
tuations of the magnitude associated with the exponential distribution create
serious problems in imaging.
However, averaging several independent image
frames will result in significantly better overall image quality.
The question
then becomes one of obtaining independent image frames, i.e., of determining
the decorrelation time for the speckle process.
The exponential distribution cited above rigorously applies to the
target-return intensity flucutations over an ensemble of macroscopically
identical rough-surface targets.
The exponential distribution has been verified
experimentally by Papurt [7] via spatial sampling of the speckle fluctuations
in IRAR images obtained form a large rough-surface target of uniform average
reflectivity.
In this spatial sampling, the target returns from non-overlapping
illumination regions on the surface are independent samples from the exponential distribution.
Because the use of spatial averaging to reduce speckle
fluctuations in a laser radar image will necessarily entail a loss in spatial
ROUGH
OBSERVATION
SURFACE
POINT
Figure 2: Formation of a speckle pattern.
-15resolution, it is important to study the time averaging of intensity returns
reflected from a single spot of the speckle target.
To probe the time-averaging
issue the radar can be operated in staring mode, that is with its scanning
capability disabled. If the target, the radar,and the intervening propagation
medium are perfectly rigid, then the radar will stare at one spot on the
target and there will be no time dependence to the intensity returns.
Prelimin-
ary staring mode IRAR measurements have shown, however, serious fluctuations of
the intensity returns in time.
It is important to know the time correlation
properties of these fluctuations since they will impact radar performance,
e.g., the use of frame averaging to reduce speckle fluctuations in the radar
image requires inter-frame time separations that are longer than a coherence
time.
Also, the contributing factors for the staring-mode fluctuations are not
known yet.
It is significant to see how these factors affect the decorrelation
process as it may help guide future improvements in the radar system.
major objectives of this thesis are two fold.
The
First, to investigate the time
correlation properties of staring-mode speckle target intensity fluctuations.
Second, to explore the causes of the decorrelation mechanism.
For the simple geometry in Figure 2, the causes of the decorrelation
process are probably the atmospheric turbulence effects along the laser propagation path, and the wind induced vibrations of the IRAR equipment and the
target.
Staring-mode IRAR data will be used to study the decorrelation process.
Simultaneous scintillation-sensor measurements will be used to estimate
atmospheric turbulence levels.
Thus, we shall be able to compare the time
correlation properties of radar data taken in various turbulence strengths.
To properly account for the speckle target intensity return fluctuations,
the probability density function and the correlation coefficient function in
-16-
time should be known.
The former furnishes information concerning the
properties of the intensity fluctuations in the amplitude domain, whereas
the latter describes the degree of correlation of the data in the time
domain.
In the latter case, we will determine the decorrelation time,
i.e., the time it takes for the data to become uncorrelated, from IRAR
Using this decorrelation time, a collection of uncorrelated
measurements.
samples will be extracted from the IRAR data and compared with the
exponential ensemble statistics predicted for the former case.
In support of the data examination, a mathematical model is
developed to describe the decorrelation process.
This model assumes free
space propagation with random radar aiming errors and random target tilts.
These statistical quantities may represent turbulence-induced phase
tilts whose strengths can be estimated from turbulence theory using
the scintillation measurements.
With these estimated values the
predictions of the decorrelation model will be compared with experimental
results from the radar data.
1.3:
Thesis Overview
In Chapter 2, we begin with a complete description of the radar
data format.
Then the procedure for estimating the correlation coefficient
function is explained.
Correlation results based on IRAR data taken in
various atmospheric turbulence levels are presented.
Finally, a chi-squared
goodness-of-fit test for the exponential distribution is performed on
the radar data.
Overall, the results of the data manipulation give us
-17-
some insight into the nature of the intensity fluctuations.
In Chapter 3, our model for the decorrelation process is
postulated and analyzed.
We shall exhibit the behavior of the model
as its parameters are varied.
The correlation coefficient predictions
of the theoretical model are then compared with the experimental radar
results of Chapter 2. Chapter 4 contains a discussion of the target
return time dependence as understood from our experimental and theoretical
results.
-18CHAPTER II
STATISTICAL PROPERTIES OF THE INTENSITY FLUCTUATIONS
This chapter is devoted to our experimental efforts aimed at understanding the decorrelation process.
We begin with a brief discussion of
atmospheric turbulence and a summary of the scintillation sensor data.
format of staring-mode IRAR data is then described.
The
Next, we shall explain
the detailed procedure for estimating the correlation coefficient function
(CCF) of the IRAR data.
Subsequently, CCFs
turbulence levels are presented.
for six data sets taken in various
Finally, chi-squared goodness-of-fit tests to the
exponential distribution are performed on the six data sets.
II.1:
Scintillation-Sensor/Radar Data Description
Radar data taken from the IRAR has been investigated in order to
understand its basic statistical properties.
It was taken in various turbulence
levels with scintillation measurements made simultaneously.
Theory for wave
propagation in the turbulent atmosphere has been well established during the
past decade [8] [9].
In order to provide pertinent information relevant to
our research, turbulence effects on laser propagation in atmosphere is introduced first.
Second, we shall explain the scintillation measurement and its
implications.
Then, the radar data description is given at the end of this
section.
II.1.1:
Atmospheric Turbulence
Atmospheric turbulence refers to the refractive index fluctuations
-19-
which are due to turbulent mixing of air parcels of nonuniform temperatures
in clear weather conditions.
These air blobs will dephase an optical wave,
hence causing transmitter beam divergence and receiver angle-of-arrival
fluctuations.
Also, the random lensing of the wave by the turbulence leads
to constructive and destructive interference, i.e., amplitude fluctuations,
called scintillation.
These effects on laser propagation were described for a time independent
medium.
In the atmosphere, since the array of turbulent eddies tend to drift
with the nominal wind velocity.
Consequently, the turbulence has a typical
coherence time tc of 10-3 to 10-2 seconds [101.
We strongly suspect that
turbulence effects are the prime factor controlling decorrelation time in
staring-mode speckle-target measurements.
As we go along, the intuition from
the data manipulation and the statistical modelling should help justify this
statement.
11.1.2:
Scintillation Measurements
The turbulence strength along the atmospheric path between IRAR and
the speckle at a particular time can be estimated from the amplitude fluctuations
(scintillation) of laser pulses that have propagated over this path.
To
perform this scintillation measurement, two lasers, CO2 and GaAs, were located
next to IRAR with their receivers located one kilometer away adjacent to the
speckle target.
Data acquisition equipment and data processing programs have
been developed at Lincoln Laboratory to produce good estimates of the turbulence
strength parameter, Cn2 [5] and the atmospheric coherence time tc from the
received CO2 and GaAs laser pulse streams.
Six sets of scintillation data were
taken while staring-mode IRAR measurements were being made.
The resulting
-20-
Cn and tc are summarized in Table 1, where they have been ordered
according to their turbulence strength.
TABLE 1
Scintillation Measurement Results
Data Set Number
Cn2
m-2/3)
tc (ms)
1
0.95 x 10l 4
39
2
0.87 x 10-13
23
3
0.107 x 10-12
45
4
0.13 x 10-12
16
5
0.2 x 10-12
26
6
0.34 x 10-12
52
-2111.1.3:
Staring-mode IRAR Data
The IRAR data was taken in staring mode using the Lincoln Laboratory
flame-sprayed aluminum speckle-target calibration plate at one kilometer
range.
The pulse-repetition frequency of the radar is 18.9 KHz,
ing to an inter-pulse time interval of approximately 52
vi
staring mode IRAR data is recorded in frames of pictures.
sec.
correspondEven in
Each frame has
128 by 60 picture elements (pixels) which are linearly proportional to the
return strengths of the associated laser pulses.
Unfortunately, the data
is not taken in a completely continuous manner, thus giving rise to some
difficulty in computing the statistical properties such as the CCF.
details were as follows.
The
Each frame has 60 active lines of 128 data points
each plus 82 missing data points because of hardware mechanics.
Because of
the periodic missing information, we had to formulate a procedure to
estimate the CCF from such an intermittent structure.
Discussion of the
CCF estimation procedure forms the essence of this chapter.
It should be
noted that the data which we deal with is the square of the IF signal envelope,
because the squared envelope is proportional to the return light intensity.
11.2:
Correlation Coefficient Function Estimation
The CCF for a wide-sense stationary random process y(t) with auto-
covariance function Kyy(v) is
CCF(v) = Kyy(v) / Kyy (o)
It is well known that
CCF(v)I < 1 with ICCF(v)|
=
1 when y(t) and y(t + v)
are completely correlated, and CCF(v) = o when y(t) and y(t + v) are
-22uncorrelated.
The decorrelation (or coherence) time of the process y(t)
can therefore be defined as the time it takes for CCF(v) to drop from one
to zero.
11.2.1:
CCF Estimation Procedure
If the data were continuously spaced, a direct method could be
employed to compute the correlation coefficient function (CCF).
Unfortunately,
because of the regularly missing observations in the radar data, a special
formulation had to be developed.
Let y(t), t = integer, be the discrete time stationary process
representing the data that would be gotten were there is no regularly missing
observations.
Let g(t) be the periodic gate function
with period a + 3
g(t) ={
0
t = a + 1
+
+
where a = 128 and B = 82.
If x(t) denotes the actual data, we can write
x(t) = g(t) y (t)
We are interested in the CCF of the random process y(t), which is
CCF(v) = Kyy(v) / Kyy(o)
where Kyy(v) is the autocovariance function of the process y(t) and the
latter is assumed to be wide-sense stationary.
We shall use as our estimate
-23of CCF(v) the function
CCF(v) = Kyy(v ; T ; N) / Kyy (0 ; T ; N)
where Kyy (v ; T ; N) is a covariance function estimate based N data streams
of length T obtained as described below.
Consider the following estimation equation,
=1
A
T-vV
vF x(t) - my(Ti)g(t)
t=l L
aV--
Kxx(v ; t) =
'x(t+v)
- my(T)g(t+v)
where Kxx(v ; T) = estimated autocovariance function of x(t) at lag v based
on a T-length data stream,
T
T
and m (T) = E x(t)
t=1
/ E
g(t)
t=l
is the sample mean of all the non-zero data points.
It is well known that
my(T) is an unbiased consistent estimator of m the mean of the process
yy
y(t) [11].
Thus, if T is large we can use m (T) ~ m
in Kxx(v
then easily shown that
T-v
E[K xx (v ; T)]
E T~~~yt
1
y(t) - mY )g(t)g(t
T-V
T = g(t)g(t + v) E
=
R (v)K
gg
(v),
yy
+
v)[y(t + V) - m
++v-my]j
y(t) - my (y(t + v) - m
T).
It is
-24T-v
where Rgg(v)
Z q(t) g(t+v) is the autocorrelation function of the gate
t= 1
g(t).
It can be shown that Rgg(v) is given by [61
,9for v=o,
...
for v=,
...
,-for v=a, ..
,
,a6
which is Dlotted in Figure 3.
It follows from the above that Kxx(v;T) / Rqg(v) is an approximately
unbiased estimater for Kyy(v) for any T-length data stream that is long
enough to ensure my(T) ~ my.
The stability of this estimator depends on the
stability of Kxx(v;T), which will be good for v<<T and poor forvZ~T [12].
Improved stability can be obtained by taking Kyy (v;T;N) to be the sample
mean of N Kxx (v;T) / Rgg(v) estimators obtained from N different T-length
data streams.
Our CCF estimation algorithm
generates my(T) and Kxx(v;T) / Rgg(v)
for N = 10 pictures each with T = 128x60 pixels.
These were averaged
together to yield Kyy (v;T;N) and CCF(v) = Kyy (v;T;N) / Kyy(O;T;N).
For
the lag values of interest it was found that averaging the 10 pictures
together gave satisfactory stability.
Typical examples of Kxx (v;T) and
CCF(v) are given in Figures 4 and 5, respectively.
11.2.2:
CCFs in Various Turbulence Levels
The estimated
CCFs for our six data sets are shown in Figures 6-11.
-25-
0. 60
Rgg
,.
0.360
S. 3"
0.150
0.
1*.
0*.
3".
400.
s*.
6*.
7".
a".
9*.
PULSES
Figure 3: Autocorrelation function of the gate function, g(t).
10*.
-26-
I
II
Ii tII
III lI t I i i I lillIll
lilii
II
5111191
I I
7.5 E+7
Kxx
5.ees*O7
a.seE+r7
0.O
S.
Ie.
ae.
30.
II 1191111111111111111 IIlI 1111111 I||i
4"0.
55.
a"0.
750.
11111 Illill
350.
PULSES
Figure 4: Estimated autocovariance function of x(t).
I
950.
1SM.
-27-
[[ii Iii
ii i
511i 115 11i11 II
ilil
i ll
Iii
I i i ii
III
1111511
I.00
0.90e
CCF
0.40
0.30
*.ao
0.10
0.e
4.10
0.
100.
a**.
300.
400.
500.
600.
700.
900.
N00.
PULSES
Figure 5: Estimated correlation coefficient function of y(t).
1000.
-28-
CCF
0.O5.
I I I I I I I I I I I I I I I I I I I Ii i
aese.
Is"*.
1"s.
see.
.
PULSES
Figure 6: CCF of Data Set 1.
I I t.
2500.
30*.
-29-
-- -- r I
I
i
I
I
I
i
i I
T
i
0.75
CEF
0.S
6.
See.
1290.
10.
2OO.
PULSES
Figure 7: CCF of Data Set 2.
25e0.
3000.
-30-
~ I~~T ~ I
o .50
I
I T
I
I
~~
I
II I I I I
I '
T
..
CCF
* .as
0.*5.
I
I
I
I
I
I
I
.Se.
I
I
I
i*.
I
I
I
I
ise..
as
PULSES
Figure 8:. CEF of Data Set 3.
s25*.
3000.
-31-
a.-IS
e.so .
CCF
0.S
L . L I I.
I
I
S.
I
I
see.
I
I
I
iee.
I
I
I
I
isee.
ee20.
PULSES
Figure 9: CCF of Data Set 4.
asee.
3900.
-32-
0.75.-
CCF
as.
0.8
L .L
I L
I
S.ao0.
L
I
I
I I I I I I I...I
IS". 50.
2000.
PULSES
Figure 10: CCF of Data Set 5.
a50e.
.
.
30".
-33-
1.00
0.7S
O.Se
...........
CCF
*.25
0.9
- .l11.
0.
L1.I
5".
LL
IIII
lose.
1
111
ise.
PULSES
Figure 11 : CCF of Data Set 6.
I 111
11111
ass.
3000.
-34-
For each figure we have computed the decorrelation time using the 52 vsec
pulse spacing.
The results are given in Table 2 along with the Cn2 values
from Table 1, and the weather description recorded by the IRAR operators.
TABLE 2
Decorrelation Data
Data set no.
1
Decorrelation Time (ms)
156
Cn2
-2/3)
Weather
0.95 x 10-~14
Haze, Overcast
2
65
0.087 x 10-12
Hiqh Solid Cloud
Cover
3
78
0.107 x 10-12
Partly Sunny
4
39
0.13 x 10-12
Clear, Sunny
5
39
0.2 x 10-12
Clear, Sunny
6
52
0.34 x 10-12
Clear, Sunny
Two interesting points we can easily observe are:
1) Data Set 1 was taken in the weakest turbulence
conditions, i.e., haze and overcast.
It took
156 ms for the CCF to drop from one to zero which
implied that the data were highly correlated.
In other words, the intensity return did not
fluctuate very much in this data set.
2) The remaining data was taken in more or less the
-35same turbulence level, since the Cn2 values
differed only slightly.
On the other hand,
the decorrelation times for Data Sets 2-6
varied from 39 to 78 ms.
An immediate implication of the first observation is that the intensity
return fluctuations depend upon the atmospheric turbulence strength very
much.
In weak turbulence, the atmosphere is just like a "frozen" medium.
Therefore, the intensity returns stay constant for relatively long time
periods.
Conversely, the intensity returns start to fluctuate more as
the turbulence strength gets stronger.
The second observation leads us to
suspect the other contributing factor, which is wind speed.
As we shall
see in the next chapter, wind speed in fact has an effect on the intensity
return fluctuations.
11.3:
Chi-squared goodness-of-fit test
The ensemble and spatial-sampling statistics of speckle-target radar
returns obey the exponential distribution.
In this section we shall use our
six data sets to examine whether exponential statistics apply to staring-mode
target returns from a speckle target.
To make a quantitative assessment we
will use a special type of hypothesis test called the chi-squared goodnessof-fit test, which is widely employed to test the equivalence of a probability
density function of sampled data to some theoretical density function.
Since the decorrelation time for each set of data is known from the previous
section, independent samples can be obtained.
We first provide a brief
description of the test and then give the test result in the sequel.
-36Consider N independent observations from a random variable x whose
probability density function is p(x).
Let the N observations be divided
into K intervals to form a frequency histogram, where f. denotes the
observed frequency in the ith interval.
The number of observations which
could be expected to fall within the ith interval if the true probability
density function of x were p0 (x) is called the expected frequency, F .
To measure the discrepancy for all intervals, a chi-squared value is computed
via
2
K' (f. - F.)2
X =
F.
where K' is the number of intervals in which the expected frequency is
higher than or equal to five.
In other words, intervals in which F. is
smaller than five are combined to form one interval.
The number of degrees
of freedom n is equal to K' - r - 1 where r is the number of parameters
estimated from the data for the hypothesized distribution.
Having obtained
x2 and n standard statistical tables will provide a corresponding level
of significance a which indicates how good the fit is.
Generally a value
of at greater than or equal to 0.05 is regarded as verifying the theoretical
distribution.
Further details about the test can be found in [12].
For our case we use the exponential distribution
-1
-x/x
x > 0
p (x) =
0
otherwise
where the mean x is set equal to the sample mean of the data.
A sample of
N = 210 independent observations was used for each of the six data sets.
-37The return values range from 0 to 65025, which is divided into K = 17
intervals and r = 1 because x has been matched to the sample mean.
A com-
puter program was written to perform the test, with the results given
in Figures 12 - 17.
In each figure, the bar chart is the histogram of
observed frequencies, and the curve is the exponential density fit to
the sample mean.
It is not an easy task to explain our results, however some useful comments can be made.
Data Set 4 has the best fit to the exponential
distribution while the others do not fit as well.
The fact that Data Set 1
has the worst fit enhances our CCF estimation result ; there is very little
randomness in this data set, which was taken in the weakest turbulence.
It further convinces us that atmospheric turbulence indeed is an important
contributing factor to the return fluctuations, because the atmosphere acts
like a "frozen" medium in weak turbulence.
-38-
, n = 6
x2 = 43.59
100.
I
I
I
II
II
I
Ii
II
ef=.0
ill
I
II
I
I
II
90.
B0.
70.
w
C-,
C
60.
S.U
5.
4C
S.-
45.
30.
2s.
19.
5.
.1..
-o a
~
-~-
E.5
5.0
7.5
10.0
12.5
IS.,
Target-return intensities
Figure 12: Histogram of target-return intensities vs. expected
frequencies of Data Set 1.
-39-
x
i oe.
I
2
I 5
18.11
=
I
I I
,
I
I
n = 6
I
I I
,
I
a
_=. 0.005
I
~ I
I
I
I
I
I
I
I
I
90.
80.
70.
V.)
S.-
C)
50.
4-
E
39.
29.
Is.
0.
inL..L
w.w
LL
2.S
7.5
is..
12.5
5.e
Target-return intensity
Figure 13: :Histogram of target-return intensities vs. expected
frequencies of Data Set 2.
-40-
x2 = 24.8
, n = 12
'. 0.02
,
1le.
-r
90.
80.
70.
w
U
a,
60.
S.-
U
U
So.
C
S.-
a,
E
40.
38.
80.
L I
9.
a
C.sm
-M
b.
I
7.S
10.1
12.5
is.
Target-return intensities
Figure 14: Histogram of target-return intensities vs. expected
frequencies of Data Set 3.
-41-
, n = 8
x2 = 10.91
S
I
I
I
I
I~ I
I
I
I
a
,
I
I
I
. 2
I
I I
I I
I
I
90.
80.
70.
a?)
U
60.
C--)
So.
E
40.
.P
3,.
.
.A
29.
1.
............
6.
.0
2.5
5.0
7.5
1.@
12.5
Is.0
Target-return intensities
Figure 15 : Histogram of target-return intensities vs. expected
frequencies of Data Set 4
-42-
x2 = 15.25
, n = 6
, a '=.0.02
100.
popI
I I
;I
I
I
I I
I
I
I i
90.
80.
70.
(j~
w
U
w
6e.
U
U
se.
0
w
-o
E
4e.
30.
in.L
L
..
a.5
2S.
je.
S.
S..
7.5
10.6
12.5
IS.0
Target-return intensities
Figure 16 :Histogram of target-return intensities vs. expected
frequencies of Data Set 5
-43-
x
100.
iI
I
2
, n = 10
=12.21
I I
I
I
I
I
I I
, a '=. 0.03
I
I
I I
I
I
I J
I
I
II
90.
BO.
70.
60.
U
U
0:
So.
40
E
..
40.
39.
20.
..
to.
K
9.,
2.s
S.,
7.5
19.0
12.5
is.,
Target-return intensities
Figure 17: Histogram of target-return intensities vs. expected
frequencies of Data Set 6
-44CHAPTER III
MATHEMATICAL MODELING
In this chapter we will report on our model for the time
dependence of the staring-mode intensity return fluctuations.
The model
ascribes the time dependence to random tilts in the radar and target
planes.
Our first step is to derive a theoretical CCF for staring-mode
measurements from the model.
Next, because our experimental results have
convinced us that atmospheric turbulence is the major cause of the intensity
return fluctuationswe use turbulence-induced tilt
quantify the.CCF model.
experimental CCF results.
standard deviations to
The model predictions are then compared with the
As we shall see, very interesting and significant
result is found.
III.1:
Theoretical Model
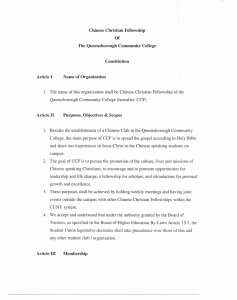
We will model the random radar motion by a random aiming angle
error e(t),
and the random target motion by a random tilting angle
(t).
As a result, in the analysis that follows, the transmitted beam and received
beam complex envelopes will include the phase term
exp j
I(t)
- T
and the target reflection process will include the phase term
exp j .LT(t) - P'
-45-
as shown in Figure 18.
The remaining pieces of our radar model parallels
that employed in [5], with continuous-wave laser operation and far-field
free space propagation assumed.
III.1.1:
Model Derivation
1. Let u1 (p,t), the complex envelope of the transmitted laser
beam, be given by,
u(Pt)
=
(PT)
exPp
(t)
circ2id
where PT is the laser power,
d is the diameter of the exit pupil,
p is the displacement vector on the radar plane, and
li(t) is the random aiming error.
2. Let u (P',t) be the transmitted beam complex envelope as
it arrives at the target L meters away from the radar.
Fraunhofer diffraction theory gives us the result,
exp t7L
1!2 (Pt)=
+ 1P 12J
jxL
dp u
pt -
exp- j L'-p
where p' is the displacement vector on the target plane.
3. Let u3 (p,t), the reflected beam complex envelope at the
target plane, be given by,
T(p', t) =
UI(,
texpp
(')exp
(t)
p'
-1
Speckle
Target
Radar
N
L.O. Beam
Figure 18: Radar Configuration
-47-
u3(P'
t)
=
+
angle,
(t) is the target tilt
where
F
()exp
t
g2(W'
(t)
and T (p')
is a
rough surface complex-field reflection function.
4.
The complex envelope, u4(p,
t), resulting from
propagation back from the target to the radar plane
obeys
d}
d
5.
3( 9
', t -
jL
L +
4(p, 't) = exp j
exp
-
i
.
-
Finally, the intermediate frequency (IF) signal has
complex envelope
=
I.t)
d
- ci rc(2. p
1/2 exp
where e(t) is the aiming error incurred on reception.
Combining the above equations, and using Gaussian beams instead
of circular beams to simplify the integrals, we get
y(t)
=-
exp j
L
2
-48-
-
dp' T (W')exp
X
(t -
)
7
2
2 -2
exp -d
-exp
-
t) 2( 2
21TXL
2j'~t
12]
'
exp
Obviously, the first exponential term in the integration is the moving
part of the target reflection model.
The second and the third terms are
the randomly displaced transmitter beam pattern and the back-propagated
local-oscillator pattern, respectively.
Our task is to calculate the
correlation coefficient function with this IF signal model by assuming
statistical properties for T (p') , 6(t) and
(t).
From this calculation
we will be able to see how e(t) and I(t) affect the decorrelation time
of the signal intensity fluctuation.
Let CCF(T) be the correlation
coefficient function, that is
CCF(t) =
<
y_(t +
T)I2
<|y(t)
|y_(t) 1> - < y(t)j2,2
4
2 2
>-
<ly_(t)I
>
Since there is a great deal of tedious algebra involved in deriving CCF,
we shall only present the key results here.
-49The expected value of the IF envelope intensity with respect
to the target ensemble is
~
2
( ')d
<y(t)2T
--
where T (p')
~P sT Sd
P
0 P2L
d
,t2
JL
t -
-e(t)|2
2
X
has been taken to be a pure speckle target model, i.e., T
is a zero-mean circulo-complex Gaussian process with correlation function
[5]
<T
(P)T*(p2)> = 2Ts 6(P1 - P2
with Is being the average intensity reflection coefficient of the surface.
Assume e(t) is a zero-mean stationary vector Gaussian process with
independent identically distributed components whose: autocovariance
function is z(T) = K
<ly(t) 2> 2)
=><< yS
(T) =
K y
2 TT (p'
-0
(k).
2
From this result, we can see that if
decorrelation time of z(T),
then
We then find that,
sT
2L
_
+ 2T 2d 2 ~z(O) - z
_
.
is short compared with the
-50-
P Tsd2
2
<1y(t)K>
2L2
In other words, if F(t) stays constant over times comparable to C or
longer, the average signal intensity return will be unaffected by the
Note that the average signal intensity is
random aiming error ~(t).
always independent of 6(t), the random tilting angle of the target.
The
next step is to calculate the quantity,
<_y(t + T)1 2 jy(t)j 2>,
to be followed by the correlation coefficient function.
Averaging with respect to the target
ensemble we get
2
-t)
4~dP T2~6t-
<ly(t+-)
2
1iy(t) 2 >
T s -exp -27r2d)2
4L 4
2
+
c
2
+
- exp
{r2d2 eF
2X
Td) Ts
4
t+d2T-
-2
L
C
4
-
4L
t+-
t
;
4L 2 _L
t+---
<t
+
-
+
+TI
+ T)|2 }
-
MWWAMQ41 "_
.11,
-51-
(t) ensemble, assuming f(t) to be a zero-mean
Next, we average over the
stationary vector Gaussian process that is statistically independent of
i(t) and has independent identically distributed components whose
autocovariance function is z'(T) = K
(T) = K
The result we
(T).
obtain is
t -
S exp>272dd 2L
<<«y(t+)I!y_(t) 2> T
04L~
d 4p
2LI
2
2
SdP T s
L
-
0 t
e
-
)
2
[z'(o)
- z'(T)] + 1
d2j
To find
2
2t)
2
(t)
+6(t+T)
X +
+
-C
2
++
t+T-
-6(t+T)
2X
2X
2L
+
t+T
+
2d22
T
-
L
16 L 2
+
A4
F1 t
-exp{
d2
Tit
-
X
2
-52-
<Iy(t + T)I2
Iy_(t) I2> =
<<<y_(t + T) I 2 yt)2
let
Fx(t)
ex (t
+ T)
tx t + T
denote a zero-mean Gaussian random vector with covariance matrix
z(0)
(2 L~
zw
zt
z(0)
z 2L
z(T)
z
f
IC
-
+
z(T)
z(0)
z(2L
z [?qL
z(0)
A
z(T)
Z
- TJ
z r +
z(T)
We then have that
<jy(t + T)J
2
y(t) 1 2 > = <<<y(t + _) 12
y(t)1 2>T>_>_
T)
-53-
T2 d 4 p
T
I2
4L4
l+
I+22AEl
I+2A C - 162L
[z' (o)
-
z'(T)]+1
where
3
-1
0
0
07
3
0
0
3
0
(rd~ 2
XJ)
1
-2
1
4?
-1
0
0
1
0
0
0
o
1
-1
0
o
-1
1
1
-1
and
E =
'w
2
2~
3
Finally, combining the preceding results for <Iy(t)1 2 > and
<1y(t + T)| 2 [y(t)jz> we get our predicted CCF
+
I+2Aw(T)EI
I
1
()+
+ 2Tr 2 d 2z
I+2AW(T)Cl[ d2(z'1(o)-z ' (T))+1]
CCF(T) =
(o)E
)-z
1
+
II+2
I
2
JI+ 2Aw(o)CI}
1
2
[z(o)-z( L)
+ 2Tr[d
c
, 2
2
J
]c
-54-
A substantial simplification results if
decorrelation time of z(t).
c is much smaller than the
As our experimental results show
decorrelation times of many msec and 2L/c is about 6 ipsec for our
data sets, we will set 2L/c = 0 and use the simplified form
CCF(T) =
L(z(o)+z([)) (z(o)-z(-))
+
1
a
16d 2L2 1z (O)
111.1.2:
+ 4(z(o)
- Z'(T)) + 1
Model Interpretation
To examine the implications of our model we shall assume that
the tilt autocovariance functions have the following forms:
Z(T)
and
=
T2
e
e
-55-
-T 2 /TL
z'(T) = a
where Y and ay
e
are the standard deviations of the random radar
aiming error (radar tilt) and the random target motion (target tilt),
respectively and Te and -c are the decorrelation times of the radar
tilt and target tilt, respectively. We would like to see how the
predicted CCF behaves as a function of the dimensionless parameters
Trda
4La
a
T/Tr
6
and T/T
.
Intuitively, if
measurements more than T
d
N > 1), radar
ac
6
e is larger than Trd (
sec apart are likely to illuminate essentially
independent portions of the target surface.
% > 1 (ay
is larger than
By the same token, if
), the radar will be likely observed
statistically independent target speckle patterns at time separated by
more than T sec.
Let us first consider the behavior of CCF when only one tilt
mechanism is active, i.e., we shall plot CCF vs. T/Te when z'(T) = 0,
and CCF vs. T/T4 when z(T) = 0. With these curves, we can compare
the CCF decorrelation time with the decorrelation time of each random
tilt.
-56-
z'(T) = 0
Case i.
In this case, we have that
CCF(T/T ) =
L
which has been plotted in Figure 19 for a
=
These curves show
1,3,5.
that CCF(T/T ) decorrelates faster as a2e' increases, and for the range
e
of a 2 , shown the GCF decorrelation time is appreciably faster than T.
e
e
Case ii.
z(T)
=
0
In this case, we have
CCF(t/
=
/E 4
-
e
}+
which has been plotted in Figure 20 for a
]
=
1,3,5.
CCF decorrelation time decreases as the normalized tilt
Once again the
angle
variance increases, but compared with the previous figure we see that
CCF decorrelation time is larger for the same tilt variance and
decorrelation time.
-57-
0.80
0.70
e.Ge
0.60
CCFs
0.50
0.40
a
0.30
- 3
e~ae
.
0.0
0*.
0.10
6.20
0.30
0.40
0.s
0.60
0.70
0.80
T/Th
Figure 19: Theoretical CCFs with only radar tilt
active.
0.90
1.60
-58-
*so
0.70
0.60
CCFs
0.40
0.30
0.*20
6.10
0.0
0.16
8.20
8.39
0.40
0.50
0.60
0.70
0.80
Figure 20 :Theoretical CCFs with only target tilt
0.9,
active.
1.00
-59-
Now let us examine how CCF behaves when both tilt mechanisms
Here it is worthwhile to define R = T /1e and to
are present.
distinguish between R > 1 (radar tilt decorrelates more rapidly than
target tilt) and R < 1 (vice versa).
In the former case, we will plot
CCF vs. T/T6; in the latter case we will plot CCF
vs. T/T .
Case iii.
R > 1
In this case, we have
71
CCF(T/Te) =
4(L ''
1-
1+e
e{
L
-
+4(a
)2
I
{e
_
J Je
+
1
1
0
(a 127)
e
(
2
R
+1
Figures 21, 22 and 23 give CCF vs. T/Te for the parameter values shown
in Table 3.
-60-
1 .00
0.90
0.80
R= 1
0.70
a
0.60
=
0.1
0.50
R= 3
CCFs
= 3
a '=0.3
0.30
0.20
R= 5
a '
0.5
0.6
0..0
0.10
*.29
0.36
0.40
*.S*
T/T
0.60
0.70
0.80
0.90
6
Figure 21: Theoretical CCFs with both radar and target tilts
active, R
>
1 and ae'
>
1.00
-61-
o.90
0.80
Rl
R =1
0.60,
e.so
CCFs
R
0.40
6.30
*
3
=
a'
3
a
3
.ae.
R= 5
a
0.1.
0.a'
5
=5
0.0
0.10
*.80
0.30
0.40
*.S@
0.60
0.70
0.80
.
T/T
6
Figure 22: Theoretical CCFs with both radar and target tilts
active, R > 1 and a6 ' = a('.
1.0
-62-
1.00
0.90
0.80
R=l
a '
e
e. 70
a '=5
o .60
0.50
CCFs
0.40
R= 3
a '=3
0.30
a '-15
R= 5
1
*~ *
0.
2s
0.S
5
a
=20
0.10
0.20
I
.0
0.30
0.40
*.S
0.66
0.70
0.86
e.g.
T/T e
Figure 23 : Theoretical CCFs with both radar and target tilts
active, R >
anda
<
1.00
-63-
Table 3:
Parameters for Figures 21,
22, 23
Ratios
a6
21
1, 3, 5
1, 3, 5
22
1, 3, 5
1, 3, 5
1, 3, 5
23
1, 3, 5
1, 3, 5
5, 15, 20
Figure Number
0.1, 0.3, 0.5
R < I
Case iv.
In this case, we have
CCF(T/T )
F
{fl2]
4(a
{
1
)4 1+
V
N)
{1
ei~2
1
R2
+4(a')2 {
- e
$
2
+7
2
Figures 24, 25 and 26 give CCF vs.
in Table 4.
e
+1
T/T
for the parameter values shown
-64-
1.00
R = 0.1
a= 0.1
0.80
0.70
R = 0.2
' = 0.3
0.60
.a
CCFs
0.40
6.30
R = 0.3
a'
-
0.10
-
0.0
, 0
0.
= 0.5
Q'= 5
l
I
0.10
I
I
0.20
I
I
0.30
I
I
0.40
6.S0
6.60
0.70
0.80
0.90
Figure 24: Theoretical CCFs with both radar and target tilts
active, R < 1 and a '
<
U'
1.00
-65-
1.00
R
0.89
0.1
R = 0.1
0.70
0.60
CCFs
0.se
0.40
R = 0.2
' = 3
0.30
*.20
a'
=
3
0.10
R =0.3
-- .
0.
0
0.10
0.20
ae' = 5, (a'
I
0.30
0.40
5
I
0.50
6.60
I
I -I
0.70
I
0.86
A-
I
0.90
1.00
Figure 25: Theoretical CCFs with both radar and target tilts active,
R < 1 anda
' =
-66-
1.00
I
I
I
I
I
I
I
I
I
I
I
0.90
0.80
0.70
0.60
CCFs
{
0.50
0.40
1
a'
=
5,
R = 0.2, a
=
15, a ' = 3
R
=0.1,
R = 0.3,
'
=
20, a
=
5
0.10
1i
6.6
6.
a
0.10
i
0.as
I
i
0.30
i
I
I
6.46
6.50
6.60
I
I
0.70
6.86
6.96
1.06
T/ T
Fiqure 26 : Theoretical CCFs with both radar and tarqet tilts active,
R < 1 and a'
>
'
-67-
Table 4:
Parameters for Figures 24, 25, 26
Ratios
Figure Number
a'
0.1, 0.3, 0.5
1, 3, 5
24
0.1, 0.2, 0.3
25
0.1, 0.2, 0.3
1, 3, 5
1, 3, 5
26
0.1, 0.2, 0.3
5, 15, 20
1, 3, 5
Figures 21-26 reinforce the conclusion drawn earlier from
cases (i) and (ii), i.e. the random tilt has a more significant
effect than does the target tilt in causing the radar return to
decorrelate more rapidly than the tilt itself.
Also, as found in
cases (i) and (ii), G has to be significantly larger than a
these two random effects have comparable impact on CCF.
to make
Note that
the target is only a calibration plate, which is not as heavy as IRAR.
and so the former is more vulnerable to external vibration caused by
the wind.
111.2.
In fact, that is what we will infer in the next section.
Model Verification
To compare our model with the CCF data from Chapter 2, we need
to quantify Ge, C,
and $(t)
and T-
T0
It is reasonable to suppose that 8(t)
are turbulence induced tilt angles.
take a, = a and c, =
T1.
This implies we should
The values for these parameters will be
obtained from the scintillation measurements reported in Chapter 2 and
-68-
substituted into our CCF model for comparison with CCF data.
By trial
and error, however, we have found that to best fit the CCF model to
should be made linearly proportional to
the CCF data the ratio y/a
TeV which is assumed equal to r .
As we shall see, this result is
interesting and it allows us to actually predict the decorrelation
time of a set of staring data by using the knowledge of the turbulent
conditions.
For d < p0 , where d is the diameter of the radar optics exit
pupil and p0 is the atmospheric turbulence coherence length, ae can be
computed from [13],
a0
2
p5/6 d1/6
0
On the other hand, the formula to calculate T needs several steps to
develop.
It can be shown that in weak turbulence the log-amplitude
coherence distance is about equal to /X[ and
T ~
//vT
'
gives the coherence time of the scintillation in terms of IvTI the
magnitude of the tranverse wind velocity which blows perpendicular to
the propagation path.
Similarly, we have that
-69-
PO/IVTI
As a result,
IT5
Finally, p0 is given by,
p0 = (1.09 Cn2 k2 L)-3/5
for a spherical wave [5].
Using the scintillation data from Table 1 and the preceding
equations we have obtained the a6 and
Table 5:
Data Set No.
Te
values shown in Table 5.
Estimated a and u6 from Turbulence Theory
T
(ms) & (pul ses)
1
a (rad)
4.3 x 10-6
2
1.3 x 10- 5
27.25
524
3
1.4 x 10- 5
46.8
900
4
1.6 x 10- 5
14.7
282
5
2.1 x 10'5
18.67
359
6
2.7 x 10 -5
27.2
522
174.3
3352
-70-
Figures 27-32 show the theoretical and experimental CCF curves for our
six data sets assuming a, = (3, Te
=
T
and the values from Table 5.
Obviously, the smooth curve is the theoretical CCF in each figure.
At
high turbulence levels, Figures 30-32, the theoretical CCFs are very
close to the experimental CCFs before the former reaches its asymptotic
value.
On the other hand, a serious discrepancy occurs in the weak
This suggests our model is good
turbulence cases, Figures 27-29.
Also, it leads us to believe turbulence
only at high turbulence levels.
is not the sole factor that causes the tilt effects in our model.
To force the theoretical CCFs to fit the experimental CCFs
better, we have tried to vary various parameter values.
that if a6 is kept constant and a
It was found
is obtained from
jT
G6
where T =
--
110
(measured in pulses) the discrepancy between
theoretical CCFs and experimental CCFs is minimized, as shown in
Figures 33-38.
The parameters for these figures are given in Table 6.
-71-
1.00
Theoretical CCF
*.75
0.50
CCFs
e.as
Experimental CCF
0.0
I 11 I
0.
I
s5.
I
I
I
I
I I
I"*.
1I
I
I
I
is"0.
I
I
I
I
20".
I
I
I
I
I
I
I
I
as".
PULSES
Figure 27 : Theoretical CCF vs. experimental CCF of Data Set 1.
3000.
-72-
1.00
e.
Theoretical CCF
,.
50
CCFs
L
S.s5
Experimental CCF
0.6
0.
500.
Is".
IS".
20".
2as.
PULSES
Figure 28: Theoretical CCF vs. experimental CCF of Data Set 2.
3000.
-73-
1.00
0.7s
Theoretical CCF
0.50
CCFs
,.25
Experimental CCF
0.O
0.
50.
1000.
IS10.
2090.
as*0.
PULSES
Figure 29: Theoretical CCF vs. experimental CCF of Data Set 3.
3000.
-74-
1 .00
0.75
Theoretical CCF
CCFs
.. as.
Experimental CCF
I I
0.
I I
I
See.
I I
I I I
in*.
I I
I I I
IS".
I I
I I
I
20".
I
I
I
as**.
PULSES
Figure 30 :Theoretical CCF vs. experimental CCF of Data Set 4.
3".
-75-
I
I
I
I
I
I
I
I
I
I I
I
I
I
I
I
I
I
0.7S
Theoretical CCF
CCFs
Experimental CCF
.5as
0..
I I
0.
i i i
See.
I
i i
1*.
II
I I
I
is".
1I
I
i
a29.
i
I
II
I
I
I
asse.
PULSES
Figure 31 : Theoretical CCF vs. experimental CCF of Data Set 5.
3"0.
-76-
1.00
0.7S
Theoretical CCF
S.
*.s
CCFs
Experimental CCF
0.ZS
S"..
IS0.
as***
PULSES
Figure 32: Theoretical CCF vs. experimental CCF of Data Set 6.
3s".
-77-
0.7S
Theoretical CCF
Experimental CCF
CCFs
*.as
6.S5
I
0.
I
I
I I
S".
I
I
II
I
I
is".
I
I I I I
15".
I
I I I
20W.
I
I
PULSES
Figure 33 : Best CCF fit
of Data Set 1.
I I I
25.
3"0.
-78-
1.00
0.7s
8.58
CCFs
Theoretical CCF
Experimental CCF
8.25
0.0
ll
0.
1 111 1i
ii
Is".
I
I
IS"0.
as*$.
PULSES
Figure 34: Best CCF fit
of Data Set 2.
ii Ji
as".
30".
-79-
1 .00
I
I
II
I
I
I
I
I
I
I
I I
I
I
I
0.75
Theoretical CCF
8.se
Experimental CCF
CCFs
*.25.
e.g
I
I
I
II
I
I
I
I
I
I
S."0.
10.
I
I
I
I
1ISO.
I
I
I
I
I
1 I
20"6.
PULSES
Figure 35 : Best CCF fit of Data Set 3.
I
I
I I
as"0.
30"0.
-80-
1 .00
0.
I
lf
i
lI
I ~I Pi
I II
|7
I
Jl i I
I
75
Theoretical CCF
O.se
Experimental CCF
CCFs
*.25.
6.S
I
I
II
;.e0.
I
I
I
I
i0.
I
I
I
I
I I
ISO$.
I
I
I I
I
I
I
M"e.
PULSES
Figure 36: Best CCF fit
of Data Set 4.
III
as"..
I
30"e.
-81-
1.00
0.7
,*se
CCFs
Theoretical CCF
.
~Experimental
CCF
0.s
o.
5".
I I
.I
5I.
20II.
PULSES
Figure 37 :Best CCF fit
of Data Set 5.
as".
39
.
-82-
1.00
0.75
Theoretical CCF
@.S
CCFs
Experimental CCF
0.2
I
0.
I
I
I
i
S"..
I
I
I
I
I
I#".
I
I
I
I I
IS".
I
I
I
I
I
I
I
20S. *
PULSES
Figure 38 : Best CCF fit
of Data Set 6.
I
I I
as"..
30".
-83-
Parameter Values for Best CCF Fit
Table 6:
Data Set No.
1
a (rad)
a6 (rad)
1.31 x 10~4
4.3 x 10-6
3352
6.2 x 10-5
1.3 x 10 -5
524
1.15 x 10~4
1.4 x 10- 5
900
4.1 x 10- 5
1.6 x 10- 5
282
6.85 x 10- 5
2.1 x 10- 5
359
1.3 x 10~4
2.7 x 10- 5
522
Table 6 shows that a
T
(pulses)
varies from 41 pirad to 131 prad.
Intuitively this could represent the turbulence effects augmented by
mechanical vibration of the target.
such vibrations is the wind.
We believe the main source of
Because the calibration plate is much
lighter than IRAR, it is more sensitive to the wind.
relationship between aV, a
In short, the
and T is significant in the sense that we
are able to predict the decorrelation time beforehand by utilizing
the scintillation data.
-84CHAPTER IV
Discussion
The time dependence of staring-mode speckle target radar returns
has been studied through a combination of laser radar data analysis and
In Chapter II, a special formulation was employed
mathematical modeling.
to estimate the correlation coefficient function (CCF) of the radar return
fluctuations in various atmospheric turbulence levels.
The experimental
CCF results showed that the radar return statistics depend upon the
The least degree of data randomness was found in the
turbulence strength.
weakest turbulence.
There was decorrelation time variation, however,
between a number of data sets collected in similar turbulence strengths.
This observation led us to believe that wind speed is also a contributing
factor to the decorrelation process.
The experimental data was also
compared to the exponential probability density function expected for
ensemble or spatial sampling of laser speckle, using a chi-squared goodnessof-fit test.
A fair agreement was found in most of the high turbulence
data; the weak turbulence data set definitely did not fit the exponential
distribution.
In chapter III, a theoretical model was developed for the decorrelation process, which modeled the time dependence as being due to random
radar and target tilts.
The CCF predicted by this model was evaluated for
a variety of parameter values.
It was found that the random radar tilt
has a stronger effect than does the random target tilt
drop from one to zero.
in forcing CCF to
In other words, the target tilt has to be significantl.y
-85larger than the radar tilt in order that both effects have comparable impact
on CCF.
By assuming both tilts were due to turbulence, the theoretical
model was quantified using parameter values estimated from scintillation
measurements that were taken concurrently with the radar data.
The
theoretical CCF results were than compared with the experimental results.
Fairly good agreement was found in the high turbulence data sets.
The
discrepancy that was found in the weak turbulence data sets convinced us
that in addition to atmospheric turbulence wind-induced target vibration
plays a role in the decorrelation process.
In trying to force the theoretical CCF model to better fit the
experimental CCF results, an interesting result was found.
If the radar
tilt standard deviation ae is kept constant and the target tilt standard
deviation a
is obtained from
a6
where
T =
=T
110
gives the tilt decorrelation times measured in pulses, the
discrepancy between theoretical CCFs and experimental CCFs is minimized.
Needless to say, this is an ad hoc procedure for estimating a and T
.
Nevertheless, this method did work very well in all six of our data sets.
Though a definite conclusion cannot be drawn, we have shown that atmospheric
turbulence and wind are indeed the prime contributing factors to staring-mode
radar return fluctuations.
Papurt [7] and Robertson [14] have worked on related aspects of
the return fluctuation problem, so it is instructive to compare their work
with ours.
Papurt has shown that reduced-scan mode radar return data from
a retroreflector had a significant fluctuation component due to turbulence
-86-
induced radar tilts in addition to the previously predicted scintillation
component [5].
A retroreflector is a corner cube made of glass surfaces
which ideally will reflect the light pulse back onto itself, so that no
target plane tilts can be inferred from retroreflector data.
lends credence to our assumption that the radar tilt
by turbulence.
Papurt's data
is caused primarily
Robertson did computer simulation of staring-mode speckle
target histograms using a l- dimensional version of the random radar tilt
and target tilt model that we have proposed.
His results showed that as the
tilts get larger, the return intensity statistics will approach the exponential probability density function when (1 + 7 ') (1 + G ') >> 1. This
result is qualitatively consistent with our experimental return-intensity
histograms.
In the future, several possible topics may be investigated to extend
this work.
First, in order to make the CCF predictions more precise,
better estimates for a , the target tilt standard deviation, and T , the
target tilt decorrelation time, are necessary.
Moreover, the ad hoc relation-
ship between a., a , T,, and c should be explored by testing it against
additional data sets.
One might also try to extend Robertson's simulation
to the 2 - dimensional problem.
-87REFERENCES
1. J. H. Shapiro, "Imaging and Target Detection with a Heterodyne-Reception
Optical Radar," Project Report TST-24, Lincoln Laboratory,
M.I.T., October 1978.
2. R. C. Harney "Infrared Airborne Radar," Proceedings of the IEEE 1980
Electronic and Aerospace Systems Conference (EASCON), pp. 462-471.
3. J. C. Dainty, ed., Laser Speckle and Related Phenomena (Springer-Verlag,
Berlin, 1975).
4. R. C. Harney and R. J. Hull, "Compact Infrared Radar Technology,"
Proc. SPIE, Vol. 227, pp. 162-170, 1980
5. J. H. Shapiro, B. A. Capron, and R. C. Harney, "Imaging and Target
Detection with a Heterodyne-Reception Optical Radar," Appl. Opt.,
Vol. 20, pp. 3292-3313, 1981.
6. E. Parzen, "On Spectral Analysis with Missing Observations and
Amplitude Modulation," The Indian Journal of Statistics, Series
A, Vol. 25, Part 4, 1963.
7. D. M. Papurt, "Atmospheric Propagation Effects on Heterodyne-Reception
Optical Radars," Doctoral Thesis, E.E.C.S. Dept., M.I.T. Cambridge,
MA, 1982.
8. A. Ishimaru, Wave Propagation and Scattering in Random Media, Vol. 1,
Academic, New York, 1978.
9. A. Ishimaru, Wave Propagation and Scattering in Random Media, Vol. 2,
Academic, New York, 1978.
10.
J. H. Shapiro, "Imaging and Optical Communication through Atmospheric
Turbulence," J.W..Strohbehn (Ed.), Laser Beam Propagation in the
Atmosphere (Springer-Verlag, Berlin, 1978).
11.
J. S. Bendat and A. G. Piersol, Engineering Applications of Correlation
and Spectral Analysis, John Wiley and Sons, New York, 1980.
12.r J. S.
Bendat and A. G. Piersol, Random Data: Analysis and Measurement
Procedures., John Wiley and Sons, New York, 1971.
13.
D. L. Fried, "Optical Resolution Through a Radnomly Inhomogeneous
Medium for Very long and Very short Exposures," Journal of the
Optical Society of America, Vol. 56, Number 10, October 1966.
14.
R. R. Robertson, "Target-return Statistics from Optical Radar Systems
in Staring Mode," Bachelor Thesis, E.E.C.S. Dept., M.I.T, Cambridge,
MA, 1982