The present Lecture Notes contains extended material based on the... tures presented at the Workshop on Mathematical Methods for Elastic...
advertisement

The present Lecture Notes contains extended material based on the lectures presented at the Workshop on Mathematical Methods for Elastic Cusped
Plates and Bars (Tbilisi, September 27–28, 2001).
It consists of two parts. The first one is devoted to cusped plates, while
the second one deals with cusped beams.
For convenience of the readers the work is organized so that each part is
self–contained and can be read independently.
We apply I.Vekua’s dimension reduction method to construct variational
hierarchical models for elastic cusped plates and beams. The corresponding
two– and one–dimensional models are studied in appropriately chosen weighted
Sobolev spaces. Moreover, we show the convergence of the sequence of approximate solutions (corresponding to the hierarchical models) to the exact solution
of the original three-dimensional problem.
George Jaiani
I. Vekua Institute of Applied Mathematics
Tbilisi State University
2 University str., Tbilisi 0143, Georgia
jaiani@viam.pepi.edu.ge
Sergo Kharibegashvili
A.Razmadze Mathematical Institute
the Georgian Academy of Sciences
1 M.Aleksidze str., Tbilisi 0193, Georgia
khar@rmi.acnet.ge
David Natroshvili
Georgian Technical University
Department of Mathematics
77 M.Kostava str., Tbilisi 0175, Georgia
natrosh@hotmail.com
Wolfgang L. Wendland
Mathematisches Institut A, Universität Stuttgart,
Pfaffenwaldring 57, D-70550 Stuttgart, Germany
wendland@mathematik.uni-stuttgart.de
1
Preface
The present Lecture Notes contains extended material based on the lectures presented at the Workshop on Mathematical Methods for Elastic Cusped
Plates and Bars (Tbilisi, September 27–28, 2001).
It consists of two parts. The first one is devoted to cusped plates, while
the second one deals with cusped beams.
For the readers convenience the work is organized so that each part is
self–contained and can be read independently.
In Part 1 we construct variational hierarchical two–dimensional models for
cusped elastic plates. With the help of variational methods, existence and
uniqueness theorems for the corresponding two–dimensional boundary value
problems are proved in appropriate weighted function spaces. By means of
the solutions of these two–dimensional boundary value problems, a sequence
of approximate solutions in the corresponding three-dimensional region is constructed. We establish that this sequence converges in the Sobolev space H 1
to the solution of the original three-dimensional boundary value problem. The
systems of differential equations corresponding to the two-dimensional variational hierarchical models are explicitly given for a general function system
and for Legendre polynomials, in particular.
In Part 2 variational hierarchical one–dimensional models are constructed
for cusped elastic beams. With the help of the variational methods the existence and uniqueness theorems for the corresponding one–dimensional boundary value problems are proved in appropriate weighted function spaces. By
means of the solutions of these one–dimensional boundary value problems the
sequence of approximate solutions in the corresponding three-dimensional region is constructed. It is established that this sequence converges (in the sense
of the Sobolev space H 1 ) to the solution of the original three-dimensional
boundary value problem.
This research was supported by the Collaborative Linkage Grant NATO
PST.CLG. 976426/5437 and the Collaborative Research Center of the German
Research Foundation DFG SFB 404 ”Multifield Problems” at the University
of Stuttgart.
We are very grateful to D. Gordeziani, M. Avalishvili and G. Avalishvili for their useful discussions and to M. Bitsadze, I. Bock, J. Bolkvadze,
M. Sharikadze, and T. Siboshvili for typing of this manuscript. Our special
thanks go to Mrs. G. Wendland for appropriate changes and corrections due
to proof reading.
Authors
2
Contents
PART 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
List of Notation . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1 Introduction
5
6
8
2 Preliminary material
2.1 Cusped prismatic shell . . . . . . . . . . . . . . . . .
2.2 Variational formulation of the basic three–dimensional
for prismatic shell type bodies . . . . . . . . . . . . .
2.3 Fourier–Legendre series . . . . . . . . . . . . . . . . .
11
. . . . . . 11
problem
. . . . . . 12
. . . . . . 15
3 Hierarchical method for elastic cusped prismatic shells: reduction to two–dimensional models
3.1 Legendre moments . . . . . . . . . . . . . . . . . . . . . . . . .
3.2 Approximating function spaces . . . . . . . . . . . . . . . . . .
3.3 Expressions for the strain and stress tensors . . . . . . . . . . .
3.4 Variational formulation in particular spaces. Existence results .
3.5 Convergence results . . . . . . . . . . . . . . . . . . . . . . . . .
16
16
17
22
28
36
4 Derivation of the basic system of two–dimensional models
41
4.1 The case of general systems . . . . . . . . . . . . . . . . . . . . 41
4.2 The case of the Legendre polynomials – Vekua’s system . . . . . 47
References . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
5 Introduction
70
6
71
Preliminary material
7 Hierarchical method for cusped beams: reduction to one-dimensional
models
77
3
PART 2
List of Notation
1 Introduction
2 Preliminary material
2.1. Cusped Beams with rectangular cross–sections
2.2. Variational formulation of the basic three-dimensional
problem for beam type bodies
2.3. Double Fourier-Legendre series
3 Hierarchical method for cusped beams: reduction
to one-dimensional models
3.1. Double Legendre moments
3.2. Approximating function spaces
3.3. Existence results
3.4. Convergence results
Appendix 2A
Appendix 2B
Appendix 2C
Appendix 2D
References
4
PART 1
HIERARCHICAL MODELS FOR CUSPED PLATES
In Part 1 we construct variational hierarchical two–dimensional
models for cusped elastic plates. With the help of variational
methods, existence and uniqueness theorems for the corresponding two–dimensional boundary value problems are proved in appropriate weighted function spaces. By means of the solutions of
these two–dimensional boundary value problems, a sequence of approximate solutions in the corresponding three-dimensional region
is constructed. We establish that this sequence converges in the
Sobolev space H 1 to the solution of the original three-dimensional
boundary value problem. The systems of differential equations corresponding to the two-dimensional variational hierarchical models
are explicitly given for a general system and for Legendre polynomials, in particular.
5
List of Notation
N := {1, 2, · · ·},
N0 := {0, 1, 2, · · ·}
Rm
m−dimensional Euclidean space (m ∈ N)
½
¾
(−)
(+)
3
2
Ω := (x1 , x2 , x3 ) ∈ R : x := (x1 , x2 ) ∈ ω ⊂ R , h (x) < x3 < h (x)
Ω = Ω ∪ ∂Ω
prismatic shell of variable thickness
ω ⊂ R2 projection of a prismatic shell Ω
½
¾
(−)
(+)
3
Γ := (x, x3 ) ∈ R : x ∈ ∂ω, h (x) < x3 < h (x)
γ
projection of Γ on ∂ω, γ0 := ∂ω\γ̄
½
(+)
(−)
> 0, x ∈ ω
thickness of a prismatic shell
2h(x) := h (x) − h (x)
≥ 0, x ∈ ∂ω
at the point x ∈ ω̄
½µ
¶
(±)
±
S :=
x, h (x) ∈ R3 :
(+)
∼
¾
x∈ω
(−)
2h(x) := h (x) + h (x)
a(x) :=
1
h(x)
∼
h(x)
b(x) :=
h(x)
∆m :=
Pn
∂2
∂2
+
...
+
∂x21
∂x2m
Legendre polynomial of order n
C ∞ (Ω, Γ) := {ϕ ∈ C ∞ (Ω) : ϕ|Γ = 0, Γ ⊂ ∂Ω}
H s (Rn ) = H2s (Rn ) = W2s (Rn ) = W s (Rn )
Bessel potential and Sobolev-
Slobodetski spaces on Rn (s ∈ R)
H s (Ω) = W s (Ω) space of restrictions to Ω ⊂ Rn of distributions from H s (Rn )
∼s
H (Ω) := {ϕ ∈ H s (Rn ) : supp ϕ ⊂ Ω̄} (s ∈ R)
6
H s (∂Ω)
Sobolev-Slobodetski space on ∂Ω (s ∈ R)
H s (S ± )
space of restrictions to S ± of distributions from H s (∂Ω) (s ∈ R)
H s (Ω, Γ) := {ϕ ∈ H s (Ω) : ϕ = 0 on Γ} (s ∈ R)
u := (u1 , u2 , u3 )> displacement vector
1
eij (u) := (uj,i + ui,j ),
2
i, j = 1, 2, 3, strain tensor
σij (u) := λδij ekk (u) + 2µeij (u), i, j = 1, 2, 3, stress tensor
λ, µ Lamé constants
T (∂, n)u
surface stress vector
[T (∂, n)u]j := σji (u)ni the j−th component of the vector T (∂, n)u
(·)> transposition operation
X1 × X2 × · · · × Xm direct product of spaces Xj , j = 1, ..., m
X m := X
· · × X}
| × ·{z
m times
∂ := (∂1 , ∂2 , · · · , ∂n )
∂j :=
∂
, j = 1, · · · , n
∂xj
ui,j (u) :=
∂ui
,
∂xj
ui,jk (u) :=
C m (Ω)
i, j = 1, 2, 3
∂ 2 ui
, i, j, k = 1, 2, 3
∂xj ∂xk
(C m (Ω̄))
m times continuously differentiable functions in Ω ( Ω̄ )
C(Ω) := C 0 (Ω), C(Ω̄)) := C 0 (Ω̄)
C m,κ (Ω)
( C m,κ (Ω̄) )
m times continuously differentiable functions
whose m–th order derivatives are Hölder continuous in Ω (Ω̄) with the
exponent κ ∈ (0, 1]
C 0,1 (Ω) (C 0,1 (Ω̄))
space of Lipschitz continuous functions in Ω (Ω̄)
7
1
Introduction
In the fifties of the twentieth century, I.Vekua [33] introduced a new mathematical model for elastic prismatic shells (i.e., of plates of variable thickness) which
was based on expansions of the three–dimensional displacement vector fields
and the strain and stress tensors in linear elasticity into orthogonal FourierLegendre series with respect to the variable of plate thickness. By taking only
the first N + 1 terms of the expansions, he introduced the so–called N –th approximation. Each of these approximations for N = 0, 1, ... can be considered
as an independent mathematical model of plates. In particular, the approximation for N = 1 corresponds to the classical Kirchhoff–Love plate model. In
the sixties, I. Vekua [34] developed the analogous mathematical model for thin
shallow shells. All his results concerning plates and shells are collected in his
monograph [71]. Works of I. Babuška, D. Gordeziani, V. Guliaev, I. Khoma,
A. Khvoles, T. Meunargia, C. Schwab, T. Vashakmadze, V. Zhgenti, and others (see [5], [16], [17], [43], [44], [50], [60], [68], [72] and the references therein)
are devoted to further analysis of I.Vekua’s models (rigorous estimation of
the modeling error, numerical solutions, etc.) and their generalizations (to
non-shallow shells, to the anisotropic case, etc.). At the same time, I. Vekua
recommended to investigate also cusped plates, i.e., plates whose thickness
vanishes on some part or on the whole boundary of the plate projection (for
corresponding investigations see the survey [12] and also I. Vekua’s comments
in [71, p.86]).
In 1957 E. Makhover [47], [48], by using the results of S. Mikhlin [51],
was the first who considered such a cusped plate with the stiffness D(x1 , x2 )
satisfying
D1 xκ2 1 ≤ D(x1 , x2 ) ≤ D2 xκ2 1 , D1 , D2 , κ1 = const > 0,
(1.1)
within the framework of classical bending theory. She particularly studied in
which cases the deflection (κ1 < 2) or its normal derivative (κ1 < 1) on the
cusped edge of the plate can be given. In 1971, A. Khvoles [44] represented the
forth order Airy stress function operator as the product of two second order
operators in the case when the plate thickness 2h is given by
2h = h0 xκ2 2 , h0 , κ2 = const > 0, x2 ≥ 0,
(1.2)
and investigated the general representation of corresponding solutions. Since
1972 the works of G. Jaiani [13]–[35] are also devoted to these problems. By
using more natural spaces than E. Makhover, G. Jaiani in [32] has analyzed
in which cases the cusped edge can be freed (κ1 > 0) or freely supported
(κ1 < 2). Moreover, he established well–posedness and the correct formulation
of all admissible principal boundary value problems (BVPs). In [25], [26], [31]
he also investigated the tension–compression problem of cusped plates, based
8
on I. Vekua’s model of shallow prismatic shells (N = 0). G. Jaiani’s results
can be summarized as follows.
Let ν be the inward normal of the plate’s boundary. In the case of the
tension-compression (N = 0) problem on the cusped edge, where
0≤
∂h
< +∞ (in the case (1.2) this means κ2 ≥ 1) ,
∂ν
which will be called a sharp cusped edge, one can not prescribe the displacement vector; while on the cusped edge, where
∂h
= +∞ (in the case (1.2) this means κ2 < 1) ,
∂ν
called a blunt cusped edge, the displacement vector can be prescribed. In the
case of the classical bending problem with a cusped edge, where
∂h
= O(dκ−1 ) as d → 0, κ = const > 0
∂ν
(1.3)
and where d is the distance between an interior reference point of the plate
projection and the cusped edge, the edge can not be fixed if κ ≥ 31 , but it can
be fixed if 0 < κ < 13 ; it can not be freely supported if κ ≥ 32 , and it can be
freely supported if 0 < κ < 23 ; it can be free or arbitrarily loaded by a shear
force and a bending moment if κ > 0. Note that in the case (1.2), the condition
(1.3) implies that d = x2 and κ = κ2 = κ31 .
For the specific cases of cusped cylindrical and conical shell bending, the
above results remain valid as it has been shown by G. Tsiskarishvili and
N. Khomasuridse [63]-[66]. These results also remain valid in the case of classical bending of orthotropic cusped plates (see [35]). However, for general cusped
shells and also for general anisotropic cusped plates, corresponding analysis is
yet to be done.
The problems involving cusped plates lead to correct mathematical formulations of BVPs for even order elliptic equations and systems whose orders
degenerate at the boundary (see [31], [36]-[39]).
Applying the functional–analytic method developed by G. Fichera in [12],
[13] (see also [10], [11]), in [31] the particular case (λ = µ) of Vekua’s system
for general cusped plates has been investigated.
The classical bending of plates with the stiffness (1.1) in energetic and
in weighted Sobolev spaces has been studied by G. Jaiani in [32], [34]. In
the energetic space some restrictions on the lateral load has been relaxed by
G. Devdariani in [9]. G. Tsiskarishvili [64] characterized completely the classical axial symmetric bending of specific circular cusped plates without or with
a hole.
In the case (1.2), the basic BVPs have been explicitly solved in [38] and
[39] with the help of singular solutions depending only on the polar angle.
9
If we consider the cylindrical bending of a plate, in particular of a cusped
one, with rectangular projection a ≤ x1 ≤ b, 0 ≤ x2 ≤ `, then we actually get
the corresponding results also for cusped beams (see [33], [27], [30], [22]-[26],
[5], [6], [40], [41], [4]).
This part deals with the existence, uniqueness, and regularity properties of
the hierarchical models of cusped plates. In practice, such plates and beams are
often encountered in spatial structures with partly fixed edges, e.g., stadium
ceilings, aircraft wings etc., in machine–tool design, as in cutting–machines,
planning–machines, in astronautics and in many other areas of engineering.
This paper is organized as follows.
In Section 2 we collect well–known auxiliary material from the three-dimensional theory of elasticity and the theory of Fourier–Legendre series.
In Section 3 we construct hierarchical models which reduce the original
three–dimensional boundary value problem for cusped and prismatic shell type
elastic bodies to two–dimensional problems. We recall that in the ”regular”
case (i.e., when the plate thickness does not vanish anywhere), the Fourier–
Legendre coefficients of the displacement vector u, which solves the original
three-dimensional problem in the space H 1 (Ω), automatically belong to the
N
N
space H 1 (ω). Moreover, all the moments wi0 , · · · , wiNi for i = 1, 2, 3 and
N := (N1 , N2 , N3 ), determined by the corresponding two-dimensional hierarchical models belong to the space H 1 (ω), while the approximations of the
N
displacement vector w represented by means of these moments belong to the
space H 1 (Ω). In the case of a cusped plate, the Fourier-Legendre coefficients
of the displacement vector u ∈ H 1 (Ω) do not belong to the space H 1 (ω) any
N
more, in general. Also, the space of approximate vectors w represented by the
N
N
moments wi0 , · · · , wiNi for i = 1, 2, 3, of the class H 1 (ω), do not belong to the
space H 1 (Ω) either. Therefore, it is necessary to choose a space for the moment
N
N
functions wi0 , · · · , wiNi defined on ω such that the corresponding linear combinations of these moments with the Legendre polynomials as coefficients, belong
to the space H 1 (Ω). This is done in Subsection 3.2. In subsection 3.3, the expressions for the strain and stress tensors corresponding to a vector–function
N
w are given. In Subsection 3.4, we establish uniqueness and existence results
for two–dimensional variational hierarchical models. We remark here that the
well–known approach of previous authors [3] needs modifications which are
related to the peculiarities of the appropriate function spaces for the unknown
moments. Subsection 3.5 is devoted to the convergence of the approximate
N
solution w to the exact solutions u of the three–dimensional original problem
in the space H 1 (Ω). There we give abstract error estimates with respect to
the approximation order N and to the maximal thickness of the plate.
Finally, in Section 4 we formulate explicitly the systems of differential equations corresponding to the two–dimensional variational hierarchical models for
10
a general orthogonal system in Subsection 4.1, and for the Legendre polynomials in Subsection 4.2. It is shown that in the latter case our system is
equivalent to the system of I. Vekua who obtained it with the help of quite
different arguments (see [33]).
The approach presented in this part we also apply to cusped beams with
rectangular cross–sections. These results will be considered in Part 2 of the
present lecture notes.
2
Preliminary material
2.1
Cusped prismatic shell
Let a three–dimensional body in the form of an elastic prismatic shell (later
on called ”shell”) occupy a bounded region Ω̄ with boundary ∂Ω,
(−)
(+)
Ω := {(x1 , x2 , x3 ) ∈ R3 : x = (x1 , x2 ) ∈ ω, h (x) < x3 < h (x)},
(2.1)
where ω̄ = ω ∪ ∂ω is the so-called projection of the shell Ω̄ = Ω ∪ ∂Ω.
(±)
In what follows we assume that h (x) ∈ C 2 (ω) ∩ C(ω̄), and
½
(+)
(−)
> 0 for x ∈ ω
2h(x) := h (x) − h (x)
≥ 0 for x ∈ ∂ω
(2.2)
is the thickness of the shell Ω̄ at the point x ∈ ω̄.
Further, let ∂ω be a Lipschitz curve and
n
o
(−)
(+)
Γ :=
(x, x3 ) ∈ R3 : x ∈ ∂ω, h (x) < x3 < h (x) ,
n (±)
o
S ± :=
(x, h (x)) ∈ R3 : x ∈ ω ;
(2.4)
denote by γ the projection of Γ onto ∂ω and let γ0 := ∂ω\γ̄.
Obviously,
∂Ω = Γ̄ ∪ S̄ + ∪ S̄ − ,
(2.5)
+
(2.3)
−
where Γ̄ is a cylindrical lateral surface, while S and S are upper and lower
face surfaces of the shell. Note that, in general, ∂Ω is not a Lipschitz surface.
If S̄ + ∩ S̄ − 6= ∅, then a shell is called a cusped shell; and the set
(+)
(−)
Γ0 := S̄ + ∩ S̄ − = {(x, x3 ) ∈ R3 : x ∈ ∂ω, x3 = h (x) = h (x)}
(2.6)
will be referred to as a cusped edge of a cusped shell.
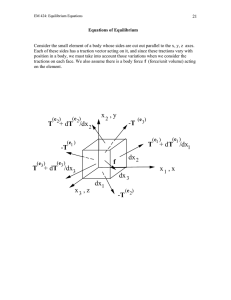
In Figures 1-3 we depict some examples of cusped shells (see Appendix A).
In Figures 4-9 we present all the possible profiles of cusped shells (see
Appendix B).
11
2.2
Variational formulation of the basic three–dimensional problem for prismatic shell type bodies
The system of equations in the three-dimensional linear theory of isotropic
elasticity in terms of the displacement vector u := (u1 , u2 , u3 )T reads as follows:
A(∂)u := µ∆3 u + (λ + µ) grad div u = f,
(2.7)
where A(∂) is a strongly elliptic differential operator
A(∂) = [Akj (∂)]3×3
h
:= µδkj ∆3 + (λ + µ)
∂2 i
,
∂xk ∂xj 3×3
(2.8)
where λ and µ are the Lamé constants, δkj is Kronecker’s symbol; and the
vector −f corresponds to some given volume force.
By
1
1
(2.9)
eij (u) = (∂i uj + ∂j ui ) = (uj,i + ui,j )
2
2
and σij (u) we denote the strain and stress tensors, respectively. They are
related by Hooke’s law
σij (u) = λδij ekk (u) + 2µeij (u) = λδij uk,k + µ(ui,j + uj,i ), i, j = 1, 2, 3. (2.10)
Here and in what follows, for brevity, we employ abridged notations:
i) repeated indices imply summation if they are not underlined. Greek
letters run from 1 to 2, and Latin letters from 1 to 3, unless stated otherwise;
ii) subscripts preceded by a comma will mean partial derivatives with respect to the corresponding coordinates (see the list of notations).
By T (∂, n)u we denote the stress vector calculated on the surface element
with the unit normal vector n = (n1 , n2 , n3 ):
[T (∂, n)u]k := σkj (u)nj for k = 1, 2, 3.
(2.11)
Recall that (6.6) can also be written in the form
[A(∂)u]k = σkj,j (u) = fk for k = 1, 2, 3.
(2.12)
Let us consider the boundary value problem (BVP):
A(∂)u = f in Ω,
T u = g + on S + ,
T u = g − on S − ,
u = 0 on Γ.
12
(2.13)
(2.14)
(2.15)
(2.16)
We look for a solution of the BVP (6.12)–(6.15) in the Sobolev space
[H (Ω)]3 .1 Assuming Ω to be a Lipschitz domain, we require the given data
to belong to the corresponding natural spaces (cf., e.g., [49, Chapt.4])
1
e −1 (Ω) and g ± ∈ H − 21 (S ± ) for k = 1, 2, 3,
fk ∈ H
k
(2.17)
1
which, in the case S̄ + ∩S̄ − 6= ∅ means that there exists a functional g ∈ H − 2 (S)
on S := ∂Ω\Γ̄ and g|S ± = g ± on S ± .
Equation (6.12) is understood in the distributional sense and the Dirichlet
condition (6.15) in the trace sense ([46], [49]). The conditions (6.13) and (6.14)
1
are understood in the sense of the space H − 2 (S ± ) since for u ∈ H 1 (Ω) with
e −1 (Ω), the functional T u ∈ H − 21 (Γ) is defined by Green’s identity,
Au ∈ H
Z
∗
hT u, u i∂Ω := σij (u)eij (u∗ )dx + hf, u∗ iΩ
for all u∗ ∈ H 1 (Ω) , (2.18)
Ω
1
1
where h·, ·i∂Ω denotes the L2 –duality between H − 2 (∂Ω) and H 2 (∂Ω), while
e −1 (Ω) and H 1 (Ω) (cf. [49, Ch.4], [8]).
h·, ·iΩ denotes the L2 –duality between H
We further denote
H 1 (Ω, Γ) := {ϕ ∈ H 1 (Ω) : ϕ = 0 on Γ}.
(2.19)
As is well known, the BVP (6.12)-(6.15) is equivalent to the following variational formulation.
Problem (I): Find u ∈ H 1 (Ω; Γ) such that
B(u, u∗ ) = F(u∗ )
where
for all u∗ ∈ H 1 (Ω, Γ) ,
(2.20)
Z
∗
σij (u)eij (u∗ )dx,
B(u, u ) :=
∗
F(u ) :=
Ω
−hf, u∗ iΩ + hg + , u∗ iS + + hg − , u∗ iS −
(2.21)
if S + ∩ S − = ∅,
(2.22)
∗
∗
+
−hf, u iΩ + hg, u iS
−
if S̄ ∩ S̄ 6= ∅;
e −r (M ),
here h·, ·iM is the duality pairing between the spaces H r (M ) and H
+
−
where r = 1 for M = Ω and r = 1/2 for M = S , S , S.
Both formulations are equivalent to the minimization problem:
Find u ∈ H 1 (Ω, Γ) such that
E(u∗ ) ≥ E(u)
for all u∗ ∈ H 1 (Ω, Γ) ,
(2.23)
where
1
If all elements of a vector field u = (u1 , u2 , · · · , uN ) belong to the same space X, as a
rule we shall write from now on u ∈ X instead of u ∈ [X]N .
13
1
E(u∗ ) := B(u∗ , u∗ ) − F(u∗ ) .
2
(2.24)
The following existence and uniqueness results are well-known (see, e.g.,
[14], [58], [49]).
THEOREM 2.1 Let Ω be a Lipschitz domain, Γ 6= ∅, and the conditions
(6.16) are fulfilled. Then the BVP (6.12)-(6.15) (i.e., the equation (2.20) and
the minimization problem (2.23), (2.24)) has a unique solution u ∈ H 1 (Ω, Γ)
and
Ckf kHe −1 (Ω) + kg + kH − 21 (S + ) + kg − kH − 12 (S − ) ,
||u||H 1 (Ω) ≤
(2.25)
+
−
Ckf k e −1 + kgk − 1
f
or
S̄
∩
S̄
=
∅,
H (Ω)
H 2 (S)
where C is a positive constant independent of u, f, g ± .
The proof of the theorem is based on the Lax-Milgram lemma since :
i) F is a bounded linear functional;
ii) the bilinear form B(·, ·) is bounded
B(u, u∗ ) ≤ δ1 ||u||[H 1 (Ω)]3 ||u∗ ||[H 1 (Ω)]3 , δ1 = const > 0;
(2.26)
iii) B(·, ·) is coercive (due to the Korn’s inequality)
B(u, u) ≥ δ2 ||u||2[H 1 (Ω)]3 ∀u ∈ [H 1 (Ω, Γ)]3 , δ2 = const > 0,
(2.27)
(see e.g., [49], Theorems 10.1 and 10.2, [59], Theorem 2.5).
Due to the regularity properties of solutions to the BVP (6.12)–(6.15),
on some subsets of Ω̄ we get higher smoothness of the solution wherever the
right–hand sides f and g ± are smoother.
1
More precisely, let g ± ∈ H r+ 2 (S ± ), f ∈ H r (Ω), S ± ∈ C r+1,1 , where r ≥ 0
is an integer. Then
u ∈ H r+2 (Ω∗ ) ,
where Ω∗ is an arbitrary subdomain of Ω̄ such that Ω̄∗ ∩(Γ̄∪γ0 ) = ∅. Moreover,
there exists a constant C = C(Ω∗ ) > 0 such that
³
´
||u||H r+2 (Ω∗ ) ≤ C ||f ||H r (Ω) + ||g + ||H r+ 21 (S + ) + ||g − ||H r+ 12 (S − ) .
(2.28)
In addition, if g ± ∈ C 1,κ (S ± ), f ∈ C 0,κ (Ω), S ± ∈ C 2,κ , then u ∈ C 2,κ (Ω̄∗ )
with 0 < κ < 1 (cf., e.g., [49], [1], [15], [62]).
REMARK 2.2 The results of Subsection 2.2 also hold true for the BVP with
the conditions (6.12)–(6.14) and
u|ΓD = 0, T u|ΓT = 0,
(2.29)
where ΓD , ΓT ⊂ Γ, ΓD ∩ ΓT = ∅, Γ ⊂ Γ̄D ∪ Γ̄T , ΓD 6= ∅.
In particular, Theorem 2.1 holds true for the BVP (6.12)–(6.14), (2.29).
14
2.3
Fourier–Legendre series
Let
(−)
(+)
ϕ(x, ·) ∈ L2 ([ h (x), h (x)]),
(+)
(2.30)
(−)
2h(x) = h (x) − h (x) > 0 for x ∈ ω.
The function ϕ(x, ·) can be then represented in the form of a Fourier–Legendre
series (see, e.g., I. Vekua [33]), i.e.,
ϕ(x, x3 ) =
∞
X
1
(k + ) a(x) ϕk (x) Pk (ax3 − b),
2
k=0
(2.31)
which converges in L2 , where
a := a(x) =
e
(+)
(−)
h(x) e
1
, b := b(x) =
, 2h(x) := h (x) + h (x) , (2.32)
h(x)
h(x)
(+)
h (x)
Z
ϕk (x) =
ϕ(x, x3 ) Pk (ax3 − b) dx3 for k = 0, ∞ .
(2.33)
(−)
h (x)
Note that
(+)
(
Zh
Pk (ax3 − b)Pl (ax3 − b)a(x)dx3 =
(−)
0
2
2k + 1
for
k 6= l,
for
k = l,
(2.34)
h
and
t := ax3 − b =
1
−1
(+)
for x3 = h ,
(−)
(2.35)
for x3 = h .
(−) (+)
Recall that if ϕ(x, ·), ϕ0,3 (x, ·), ϕ00,33 (x, ·) ∈ C 0 ([ h , h ]), then the corre(−) (+)
sponding Fourier–Legendre series converges to ϕ(x, ·) uniformly on [ h , h ]
(see, e.g., [2, Ch. 15, §2]). For further convergence properties see, e.g., [18,
Ch.7] and [42].
15
3
Hierarchical method for elastic cusped prismatic shells: reduction to two–dimensional
models
3.1
Legendre moments
Let f ∈ C 0,α (Ω̄), and u ∈ H 1 (Ω) ∩ C 2,α (Ω) ∩ C 2 (Ω ∪ S + ∪ S − ) be the unique
solution of the BVP (6.12)–(6.15). Then ui can be expanded into the Fourier–
Legendre series in Ω:
∞
P
ui (x, x3 ) =
(k + 12 ) a uik (x) Pk (ax3 − b)
k=0
(3.1)
(+)
(−)
for x ∈ ω , h (x) < x3 < h (x),
and i = 1, 2, 3,
where
(+)
(−)
(+)
(−)
h (x) − h (x) > 0 for x ∈ ω,
(3.2)
h (x) − h (x) ≥ 0 for x ∈ ∂ω ,
(+)
h (x)
Z
uik (x) =
ui (x, x3 )Pk (ax3 − b)dx3 for k = 0, ∞ , i = 1, 2, 3. (3.3)
(−)
h (x)
Evidently, (6.15) implies
uik (x)|γ = 0 .
(3.4)
We recall that γ is the projection of Γ onto ∂ω. Note that with the help of
(2.35), the Fourier coefficient (7.4) can be rewritten as
1
uik (x) =
a
Z+1
t+b
ui (x,
) Pk (t)dt
a
−1
Z+1
= h(x) ui (x, h(x)t + h̃(x)) Pk (t) dt,
(3.5)
−1
which shows that if ui is bounded in the spatial vicinity of γ0 , then
uik (x)|γ0 = 0 for k = 0, ∞ and i = 1, 2, 3,
since
1
1
= h(x) =
a(x)
2
·
(3.6)
¸
h (x) − h (x)
(+)
(−)
vanishes on γ0 .
Clearly, in general, ui ∈ H 1 (Ω) is not bounded and the condition (7.7) does
not hold.
16
3.2
Approximating function spaces
Let us fix N := (N1 , N2 , N3 ) ∈ N30 and consider the linear combinations
N
wi (x1 , x2 , x3 ) ≡ wi (x1 , x2 , x3 ) :=
Ni ¡
P
ri =0
ri +
1
2
¢
N
a wiri (x1 , x2 ) Pri (ax3 − b)
for i = 1, 2, 3,
(3.7)
N
1
Hloc
(ω)
and where underlining an index means that these
where wiri ≡ wiri ∈
repeated indices do not imply summation. The functions wiri are called the
moments of the function wi .
∼
Denote by V N (Ω) := VeN1 (Ω) × VeN2 (Ω) × VeN3 (Ω) the set of vector–functions
with components of the form (7.8) which belong to H 1 (Ω).
Let
wi ∈ VeNi (Ω, Γ) ⊂ H 1 (Ω),
(3.8)
where
VeNi (Ω, Γ) := {wi ∈ VeNi (Ω) : wi = 0 on Γ}.
(3.9)
Our aim is now to choose the corresponding function spaces for the moments wiri .
Taking into account (7.9), (6.15), (2.35), and using the standard limiting
procedure, we easily get
Z
2
|wi (x1 , x2 , x3 )| dΩ =
Z X
Ni
ω
Ω
which implies
1
(ri + ) a |wiri (x1 , x2 )|2 dω < +∞,
2
r =0
(3.10)
i
1
a 2 wiri ∈ L2 (ω) for ri = 0, Ni .
(3.11)
2
Analogously, applying the formula
r−1
Pr0 (t)
1X
(2s + 1)[1 − (−1)r+s ]Ps (t) with t = ax3 − b,
=
2 s=0
we obtain
Z
|wi,3 (x1 , x2 , x3 )|2 dΩ
Ω
(+)
=
Z Zh n X
Ni
ω
2
(−)
ri
¤
1 2X
1 £
(ri + )a
(si + ) 1 − (−1)ri +si
2
2
r =0
s =0
i
i
h
Here and in what follows we assume that
Pm
17
s=k (
· ) = 0 for m < k.
(3.12)
o2
×Psi (ax3 − b)wiri (x1 , x2 ) dx3 dω
Z X
Ni
Ni n X
=
ω
si =0
ri =si
i
o2
1 h
ri +si
(ri + ) 1 − (−1)
wiri (x1 , x2 )
2
1
a3 (si + )dω < +∞ ,
2
(3.13)
which implies
a
3/2
Ni
X
1
(ri + )[1 − (−1)ri +si ]wiri ∈ L2 (ω) for si = 0, Ni .
2
r =s
(3.14)
i
i
In turn these inclusions yield
a3/2 wiri ∈ L2 (ω) for ri = 1, Ni .
(3.15)
Similarly, applying the formula
Pr,α (ax3 − b) = (a,α x3 − b,α )Pr0 (ax3 − b)
r
X
= Aα0 rPr (ax3 − b) +
Aαq (2r − 2q + 1)Pr−q (ax3 − b) (3.16)
q=1
with
(+)
Aαq
(−)
h ,α − (−1)q h ,α
=−
,
2h
(3.17)
we arrive at the equation
Z
∂
|
wi (x1 , x2 , x3 )|2 dΩ
∂xα
Ω
(+)
=
Z Zh ³ X
Ni
ω
(−)
1 n
(ri + ) a,α Pri (ax3 − b) wiri
2
r =0
i
h
+a[Aα0 ri Pri (ax3 − b) +
o
ri
X
Aαqi (2ri − 2qi + 1)Pri −qi (ax3 − b)] wiri
qi =1
+aPri (ax3 − b)wiri ,α )2 dx3 dω
(+)
=
Z Zh ³ X
Ni
ω
(−)
1
a,α
a(ri + ){[(
+ Aα0 ri )wiri + wiri ,α ]Pri (ax3 − b)
2
a
r =0
i
h
18
+
´2
1
2Aαri −si wiri (si + )Psi (ax3 − b)} dx3 dω.
2
s =0
rX
i −1
(3.18)
i
Introduce the notation
Ψ(α,ri −si ,ri ) := 2Aα ri −si wiri for ri − si > 0 ,
1
a,α
(ri + )Ψ(α,0,ri ) := (
+ Aα0 ri )wiri + wiri ,α
2
a
h,α
= −(ri + 1)
wiri + wiri ,α .
h
(3.19)
(3.20)
Then from (7.19) one obtains
Z
|wi,α (x1 , x2 , x3 )|2 dΩ
Ω
(+)
=
Z Zh n X
Ni
ω
(−)
ri
´o2
1 ³X
1
(ri + )a
Ψ(α,ri −si ,ri ) (si + )Psi (ax3 − b)
dx3 dω
2
2
s =0
r =0
i
i
h
(+)
=
Z Zh n X
Ni
Ni ³ X
ω
si =0 ri =si
h
Ni
Ni ³ X
X
´
o2
1
1
(ri + )Ψ(α,ri −si ,ri ) a(si + )Psi (ax3 − b) dx3 dω
2
2
(−)
Z
=
si =0
ω
ri =si
´2
1
1
(ri + )Ψ(α,ri −si ,ri ) a(si + ) dω.
2
2
(3.21)
Consequently,
Φ
(α,si ,Ni )
1/2
:= a
Ni
X
ri =si
1
(ri + )Ψ(α,ri −si ,ri ) ∈ L2 (ω) for si = 0, Ni .
2
(3.22)
Denote
viri := h−ri −1 wiri .
(3.23)
The functions viri are called weighted moments of the function wi . From
N
(7.11), (7.14), and (7.20)–(7.22) it follows that w ≡ w := (w1 , w2 , w3 ) satisfies
||w||2H 1 (Ω)
=
Ni
3 hX
X
1
1
(ri + )||hri + 2 viri ||2L2 (ω)
2
r =0
i=1
+
Ni
X
i
Ni
X
1
1
1
(si + )||
(ri + )[1 − (−1)ri +si ]hri − 2 viri ||2L2 (ω)
2 r =s
2
s =0
i
i
i
19
(3.24)
Ni
Ni
2 X
i
X
X
1
1
1
si +1/2
+
(si + )||h
visi ,α +
(ri + ) 2Aα ri −si hri + 2 viri ||2L2 (ω) .
2
2
α=1 s =0
r =s +1
i
i
i
Let
v := (v10 , ..., v1N1 , v20 , ..., v2N2 , v30 , ..., v3N3 )T ,
(3.25)
where viri are given by (7.24).
(+) (−)
1
DEFINITION 3.1 By HN
( h , h , ω) we denote the subspace of vector–fun1
ctions belonging to [Hloc (ω)]N1 +N2 +N3 +3 for which the norm ||.|| 1 (+) (−) de-
fined by the right–hand side of (7.25) is finite.
HN ( h , h ,ω)
(+) (−)
1
LEMMA 3.2 The space HN
( h , h , ω) is complete.
Proof. Denote for any ε > 0:
ωε := {x ∈ ω : |x − y| ≥ ε for all y ∈ γ0 } .
The norm || · ||
(+) (−)
1 (
HN
h , h ,ωε )
is equivalent to the norm || · ||[H 1 (ωε )]N1 +N2 +N3 +3
since h(x) > 0 for x ∈ ωε , i.e., h(x) ≥ const > 0.
(+) (−)
1
Let {vn } ⊂ HN
( h , h , ω) be a fundamental sequence. We will show that
(+) (−)
1
it converges to some vector v ∈ HN
( h , h , ω). Due to the above equivalence,
the sequence {vn } is then also fundamental in the space [H 1 (ωε )]N1 +N2 +N3 +3
1
for arbitrary ε > 0. Since HN
(ωε ) is complete, there exists a vector v (ε) ∈
[H 1 (ωε )]N1 +N2 +N3 +3 such that
||vn − v (ε) ||[H 1 (ωε )]N1 +N2 +N3 +3 → 0 as n → +∞.
Note that for ε1 < ε2 (i.e., ωε1 ⊃ ωε2 ) there holds for the restriction onto ωε2 :
v (ε1 ) |ωε2 = v (ε2 ) .
1
Therefore, there exists a vector-function v0 ∈ [Hloc
(ω)]N1 +N2 +N3 +3 such that
for every ε > 0
v0 |ωε = v (ε) .
It is evident that
||vn ||
(+) (−)
1 (
HN
h , h ,ω)
≤ M for all n ∈ N,
where M is some positive constant. Obviously,
||vn ||
(+) (−)
1 (
HN
h , h ,ωε )
≤ ||vn ||
(+) (−)
1 (
HN
h , h ,ω)
20
≤ M for every ε > 0,
and
||v0 ||
(+) (−)
1 (
HN
h , h ,ωε )
= ||v (ε) ||
(+) (−)
1 (
HN
h , h ,ωε )
= lim ||vn ||
n→+∞
(+) (−)
1 (
HN
h , h ,ωε )
≤ M.
Hence
||v0 ||
(+) (−)
1 (
HN
h , h ,ω)
:= lim ||v0 ||
ε→0
(+) (−)
1 (
HN
h , h ,ωε )
≤ M,
(+) (−)
1
which implies that v0 ∈ HN
( h , h , ω).
(+) (−)
1
It remains to show that vn → v0 in the space HN
( h , h , ω). Indeed, for
any arbitrary δ > 0 there exists a number N0 (δ), such that
||vn − vm ||
(+) (−)
1 (
HN
h , h ,ωε )
≤ ||vn − vm ||
(+) (−)
1 (
HN
h , h ,ω)
<δ
for n, m > N0 (δ). Passing to the limit as m → ∞ for fixed n we get
||vn − v (ε) ||
(+) (−)
1 (
HN
h , h ,ωε )
= ||vn − v0 ||
(+) (−)
1 (
HN
h , h ,ωε )
≤ δ for all n > N0 (δ) .
Sending ε to zero we conclude that
||vn − v0 ||
(+) (−)
1 (
HN
h , h ,ω)
≤ δ for all n > N0 (δ),
which completes the proof. 2
(+) (−)
1
COROLLARY 3.3 HN
( h , h , ω) is a Hilbert space and a subspace of
(+) (−)
1
1
Hloc
(ω), that is, for any ε > 0 and v ∈ HN
( h , h , ω) there holds
v ∈ [H 1 (ωε )]N1 +N2 +N3 +3 .
COROLLARY 3.4 VeN (Ω) is a closed subspace of H 1 (Ω).
Proof. It readily follows from the above isometry (see (7.25) and Definition
3.1 ) that
||w||VeN (Ω) = ||v|| 1 (+) (−) = ||w||H 1 (Ω)
HN ( h , h ,ω)
for every w ∈ VeN (Ω), where v corresponds to w according to the relations
(7.9), (7.24), and (7.26). 2
We now introduce the spaces (cf. (3.9))
VeN (Ω, Γ) := {w ∈ VeN (Ω) : w|Γ = 0},
(+) (−)
(+) (−)
1
1
( h , h , ω) : v|γ = 0}.
( h , h , ω, γ) := {v ∈ HN
HN
21
(3.26)
(3.27)
LEMMA 3.5 If w ∈ VeN (Ω, Γ) then the corresponding vector of weighted mo(+) (−)
1
ments v ∈ HN
( h , h , ω, γ).
Proof. Due to the trace theorem we have (see also (7.8) and (7.24))
0 = τΓ (wi ) =
Ni
X
1
(r + )[Pri (ax3 − b)]Γ τγ (hri viri ),
2
r =0
i
where τΓ and τγ are the trace operators on Γ and γ, respectively.
The equality ||τΓ (wi )||2L2 (Γ) = 0 along with the Fubini theorem and (6.15)
gives
τγ (hri viri ) = 0 for ri = 0, Ni and i = 1, 2, 3,
which implies τγ viri = 0 since h|γ > 0. 2
(+) (−)
1
REMARK 3.6 It is easy to see that VeN (Ω, Γ) and HN
( h , h , ω, γ) are closed
(+) (−)
1
subspaces of H 1 (Ω, Γ) and of HN
( h , h , ω), respectively, and represent Hilbert
spaces with respect to the respective natural scalar products induced by H 1 (Ω)
(+) (−)
1
and HN
( h , h , ω).
3.3
Expressions for the strain and stress tensors
In what follows, for simplicity, we assume that
viri = 0 for Ni < ri ≤ N
(3.28)
with N := max{N1 , N2 , N3 }.
In order to obtain expressions for the strain tensor in terms of the vector–
function
w ∈ VeN (Ω) ,
we substitute (7.8) in (6.8) and distinguish the following three cases:
{i = α, j = β}, {i = α, j = 3}, and {i = j = 3}. Due to (7.24) and (7.27)
we assume that
wiri = 0 for Ni < ri ≤ N,
and i = 1, 2, 3.
(3.29)
We begin with the first case i = α , j = β. Applying (7.8), (3.29), and (7.17),
we get
1
eαβ (w) = (wα,β + wβ,α )
2
N
1 X³
1 ´n
a,β wαr Pr (ax3 − b) + a wαr,β Pr (ax3 − b)
=
r+
2 r=0
2
22
+a wαr Pr0 (ax3 − b) (a,β x3 − b,β ) + a,α wβr Pr (ax3 − b)
i
0
+a wβr,α Pr (ax3 − b) + awβr Pr (ax3 − b) (a,α x3 − b,α )
1 X³
1 ´n
=
r+
[a(wαr,β + wβr,α ) + a,β wαr + a,α wβr ] Pr (ax3 − b)
2 r=0
2
r
h
i
X
+awαr Aβ0 rPr (ax3 − b) +
Aβq (2r − 2q + 1) Pr−q (ax3 − b)
N
q=1
h
+awβr Aα0 r Pr (ax3 − b)
+
r
X
io
Aαq (2r − 2q + 1)Pr−q (ax3 − b)
.
(3.30)
q=1
By introducing
½
r
bαs :=
−(r + 1) h,α h−1
(2s + 1) Aα r+s
if s = r ,
if s =
6 r,
(3.31)
we find
r
r
a,α + aAα0 r = abαr and Aαr+s (2s + 1) = bαs , for s 6= r.
(3.32)
Taking into account (7.32) and the obvious relation
N X
r
X
crs =
r=0 s=0
N X
N
X
crs ,
(3.33)
s=0 r=s
after substitution r − q = s, from (7.30) we have
N
1 X³
1´
a(wαr,β + wβr,α )Pr (ax3 − b)
eαβ (w) =
r+
2 r=0
2
N
r
´
r
1 X X³
1 ´ ³r
a bβs wαr + bαs wβr Ps (ax3 − b)
+
r+
2 r=0 s=0
2
N
1 X³
1´
a(wαr,β + wβr,α )Pr (ax3 − b)
=
r+
2 r=0
2
N
N
´
r
1 XX³
1 ´ ³r
a bβs wαr + bαs wβr Ps (ax3 − b).
+
r+
2 s=0 r=s
2
(3.34)
Denote by Σ1 the second sum and interchange there r and s. By virtue of
(7.31) and the identity
³
³
1´
1´
s+
(2r + 1) = r +
(2s + 1),
(3.35)
2
2
23
which with (7.32) implies
³
r+
³
1 ´r
1 ´s
=
s
+
bαs
bαr ,
2
2
(3.36)
we obtain
¶ ³
N
N µ
´
s
s
1X X
1
Σ1 =
s+
a bβr wαs + bαr wβs Pr (ax3 − b)
2 r=0 s=r
2
¶ ³
N
N µ
´
r
r
1X X
1
=
r+
a bβs wαs + bαs wβs Pr (ax3 − b).
2 r=0 s=r
2
Finally, substituting the last expression into (7.34), we get
eαβ (w) =
N µ
X
r=0
where
1
r+
2
¶
a(x)eαβr (x)Pr (ax3 − b) for α, β = 1, 2,
´
r
1
1 X ³r
= (wαr,β + wβr,α ) +
bβs wαs + bαs wβs
2
2 s=r
(3.37)
N
eαβr
(3.38)
for α, β = 1, 2 and r = 0, N .
In the second case, i = α and j = 3, denoting
r
b3s := (2s + 1)
1 − (−1)s+r
2h
(3.39)
and applying formulae (7.13), (7.17), (7.32), and (7.33), we have
1
eα3 (w) = (wα,3 + w3,α )
2
¶
N µ
1X
1 h 2
=
r+
a wαr Pr0 (ax3 − b) + a,α w3r Pr (ax3 − b)
2 r=0
2
i
+aw3r,α Pr (ax3 − b) + aw3r Pr0 (ax3 − b)(a,α x3 − b,α )
¶
N µ
r
X
r
1X
1 n
=
r+
awαr
b3s Ps (ax3 − b) + (a,α w3r + aw3r,α )Pr (ax3 − b)
2 r=0
2
s=0
r
h
io
X
+aw3r Aα0 rPr (ax3 − b) +
Aαq (2r − 2q + 1)Pr−q (ax3 − b)
=
1
2
N µ
X
r=0
q=1
¶
r
X
r
1 h
r+
aw3r,α Pr (ax3 − b) + awαr
b3s Ps (ax3 − b)
2
s=0
24
r
+abαr w3r Pr (ax3 − b) + a
r−1
X
i
Aαr+s (2s + 1)Ps (ax3 − b)w3r
s=0
¶
N µ
1X
1
=
r+
aw3r,α Pr (ax3 − b)
2 r=0
2
¶ X
N µ
r ³
´
r
r
1X
1
+
r+
a
b3s wαr + bαs w3r Ps (ax3 − b)
2 r=0
2
s=0
¶
N µ
X
1
1
=
r+
aw3r,α Pr (ax3 − b)
2 r=0
2
¶ ³
N
N µ
´
r
r
1X X
1
r+
a b3s wαr + bαs w3r Ps (ax3 − b) .
+
2 s=0 r=s
2
(3.40)
P
Denote by 2 the second sum and interchange there r and s. By virtue of
(7.36) and (7.39) which with (7.35) implies
³
³
1 ´r
1 ´s
r+
b3s = s +
b3r ,
2
2
(3.41)
we obtain
¶ ³
N
N µ
´
s
s
1 XX
1
Σ2 =
a b3r wαs + bαr w3s Pr (ax3 − b)
s+
2 r=0 s=r
2
¶ ³
N
N µ
´
r
r
1X X
1
=
r+
a b3s wαs + bαs w3s Pr (ax3 − b) .
2 r=0 s=r
2
Substituting the last expression into (7.40), we get
eα3 (w) =
N µ
X
r=0
1
r+
2
¶
a(x)eα3r (x)Pr (ax3 − b)
for α = 1, 2,
(3.42)
where
´
r
1 X ³r
1
for α = 1, 2 and r = 0, N .
eα3r = w3r,α +
+
w
w
b3s αs bαs 3s
2
2 s=r
N
(3.43)
Finally, in the third case i = 3 , j = 3, by applying formulae (7.13), (7.39),
(7.33), and (7.41), we have
e33 (w) = w3,3 =
N µ
X
r=0
1
r+
2
25
¶
a2 w3r Pr0 (ax3 − b)
N µ
X
¶
r
X
r
1
=
r+
aw3r
b3s Ps (ax3 − b)
2
r=0
s=0
µ
¶
N
N
X X
r
1
=
r+
ab3s w3r Ps (ax3 − b)
2
s=0 r=s
¶
N X
N µ
X
s
1
=
s+
ab3r w3s Pr (ax3 − b)
2
r=0 s=r
¶
N X
N µ
X
r
1
=
r+
ab3s w3s Pr (ax3 − b)
2
r=0 s=r
¶
N µ
X
1
a(x)e33r (x)w3s Pr (ax3 − b),
=
r+
2
r=0
where
e33r
N
X
r
=
b3s w3s for r = 0, N .
(3.44)
(3.45)
s=r
Now, we can rewrite all the formulae (7.38), (7.43), and (7.45) in an unified
form, i.e.,
´
N ³r
r
P
eijr = 12 (wir,j + wjr,i ) + 21
bjs wis + bis wjs
(3.46)
s=r
for i, j = 1, 2, 3 and r = 0, N .
The last formula has been derived by I. Vekua [33] who was using, however,
different arguments.
In view of (7.24), (7.31), and (7.39) we conclude
¡ r+1 ¢ i
1 h¡ r+1 ¢
eijr (v) =
h vir ,j + h vjr ,i
2
N
´
r
1 X s+1 ³ r
+
h
bjs vis + bis vjs
2 s=r
1
1
= hr+1 (vir,j + vjr,i ) + (r + 1)hr (h,j vir + h,i vjr )
2
2
N
´
r
1 X s+1 ³ r
1
− (r + 1)hr (h,j vir + h,i vjr ) +
h
+
v
v
bjs is bis js ,
2
2 s=r+1
which provides us with the relations
N
´
r
1 X s+1 ³ r
1 r+1
eijr (v) = h (vir,j + vjr,i ) +
h
bjs vis + bis vjs
2
2 s=r+1
for i, j = 1, 2, 3 and r = 0, N .
26
(3.47)
Thus, by virtue of (7.37), (7.42), and (7.44),
¶
N µ
X
1
eij (w) =
r+
aeijr (v) Pr (ax3 − b) for i, j = 1, 2, 3 ,
2
r=0
(3.48)
where eijr is given by (7.47).
Now, according to Hooke’s law (6.9), we get the following expressions for
the stress tensor:
σij (w) = λδij ekk (w) + 2µeij (w)
¶
¶
N µ
N µ
X
X
1
1
= λδij
r+
aekkr Pr (ax3 − b) + 2µ
r+
aeijr Pr (ax3 − b)
2
2
r=0
r=0
¶
N µ
X
1
=
r+
a [λδij ekkr + 2µeijr ] Pr (ax3 − b) ,
(3.49)
2
r=0
i.e.,
σij (w) =
N µ
X
r=0
1
r+
2
¶
aσijr (v)Pr (ax3 − b) for i, j = 1, 2, 3,
(3.50)
where
σijr (v) = λδij ekkr (v) + 2µeijr (v) for i, j = 1, 2, 3, r = 0, N .
(3.51)
From (7.49), by virtue of (7.47), we have
¶ n
N µ
N
³
´
X
X
r
1
r+1
σij (w) =
r+
a λδij h
vαr,α +
bks vks
2
r=0
s=r+1
N
´ io
h
³r
X
r
Pr (ax3 − b)
+µ hr+1 (vir,j + vjr,i ) +
hs+1 bjs vis + bis vjs
=
N µ
X
r=0
1
r+
2
s=r+1
¶
h
h
+µ vir,j + vjr,i +
r
n
³
λδij vαr,α +
N
X
r
´
bks vks
s=r+1
N
X
³r
´ io
r
hs−r bjs vis + bis vjs
Pr (ax3 − b)
(3.52)
s=r+1
for i, j = 1, 2, 3. So, as a consequence, the moments of the stress tensor have
the representation
σijr (v) = λδij h
r+1
vαr,α + µh
r+1
(vir,j + vjr,i ) +
N
X
r
B ijks h
s+1
vks
(3.53)
s=r+1
for i, j = 1, 2, 3, r = 0, N , where
r
r
r
r
B ijks := λδij bks + µδik bjs + µδkj bis
for i, j, k, s = 1, 2, 3, r = 0, N .
27
(3.54)
3.4
Variational formulation in particular spaces. Existence results
For any pair of elements
µ
∗
v, v ∈
1
HN
¶
(+) (−)
h , h , ω, γ
(3.55)
∼
we construct w, w∗ ∈ V N (Ω, Γ) according to the formulae (7.24) and (7.8):
wi (x, x3 ) =
Ni µ
X
ri =0
wi∗ (x, x3 )
=
Ni µ
X
ri =0
1
ri +
2
1
ri +
2
¶
hri viri (x)Pri (ax3 − b) ,
(3.56)
∗
hri vir
(x)Pri (ax3 − b)
i
(3.57)
¶
for i = 1, 2, 3. Then, consider the following variational problem.
∼
Ω
Problem (IN
). Find w ∈ V N (Ω, Γ) such that
∼
B(w, w∗ ) = F(w∗ ) for all w∗ ∈ V N (Ω, Γ),
(3.58)
where the bilinear form B(·, ·) and the linear functional F(·) are given by
(2.21) and (2.22), respectively, with f and g ± satisfying the same conditions
as in Subsection 2.2.
Due to the coerciveness (2.27) and the Lax–Milgram lemma along with
Corollary 3.4 we obtain the following statement.
Ω
LEMMA 3.7 The variational problem (IN
) has a unique solution.
Ω
Further, we now reduce the three–dimensional variational Problem (IN
) (see
(7.58)) to the two-dimensional variational problem for the vector-function of
weighted moments. To this end we have to substitute (7.56) and (7.57) into
(7.58), apply formulae (2.21), (2.22), (7.48), (7.50), and (7.51) along with the
orthogonality property of the Legendre polynomials (6.15). We get
(+)
Z
∗
B(w, w ) =
dω
ω
Zh X
N X
N µ
(−)
r=0 s=0
1
r+
2
¶µ
1
s+
2
h
×Pr (ax3 − b)Ps (ax3 − b)dx3
¶
Z X
N µ
1
=
r+
aσijr (v)eijr (v ∗ )dω
2
r=0
ω
28
¶
a2 σijr (v)eijs (v ∗ )
=
=
Z X
N µ
r=0
ω
N µ
X
r=0
1
r+
2
1
r+
2
¶
¶Z
a [λδij ekkr (v)eijr (v ∗ ) + 2µeijr (v)eijr (v ∗ )] dω
i
a[λekkr (v)eiir (v ∗ ) + 2µeijr (v)eijr (v ∗ ) dω
ω
ω
(v, v ∗ ) ,
BN
=:
(3.59)
r
¶Z h
3
N µ
X
X
(+)
1
F(w∗ ) =
r+
a − firi + gi+ 1 + (∇ h )2
2
i=1 ri =0
ω
r
(−) i
∗
ω
+(−1)ri gi− 1 + (∇ h )2 hri +1 vir
(v ∗ ) ,
dω =: FN
i
(3.60)
where
(+)
Zh
firi (x) =
fi (x, x3 )Pri (ax3 − b)dx3 for i, j = 1, 2, 3, ri = 0, Ni ,
(3.61)
(−)
h
and we assume
firi (x) = 0
for
Ni < r i ≤ N .
(3.62)
Thus, (7.58) is equivalent to the following two–dimensional variational Problem
ω
(IN
):
¶
µ
1
Find v ∈ HN
(+) (−)
h , h , ω, γ
such that
µ
ω
BN
(v, v ∗ )
=
ω
FN
(v ∗ )
∗
for all v ∈
1
HN
(+) (−)
h , h , ω, γ
¶
.
(3.63)
For this problem, we show the following existence result.
THEOREM 3.8 If ω is a Lipschitz domain and
r
"
1
ψiri := h− 2 −firi + gi+
r
+(−1)ri gi−
(+)
1 + (∇ h )2
#
(3.64)
(−)
1 + (∇ h )2 ∈ L2 (ω) ,
ω
then Problem (IN
) has a unique solution v which satisfies the estimate
||v||
H1
N
!
Ã
(+) (−)
h , h ,ω
ω
||FN
||
,
≤
δ2
where δ2 is the constant involved in (2.27).
29
(3.65)
Proof. Due to the equality (3.59), the coerciveness and boundedness of
B(·, ·) (see inequalities (2.26) and (2.27)) and isometry (7.25) (see Definition
ω
3.1) it follows that the bilinear form BN
(·, ·) is coercive and bounded:
ω
(v, v) = B(w, w) ≥ δ2 ||w||2H 1 (Ω) = δ2 ||v||2
BN
Ã
1
HN
(+) (−)
!
,
(3.66)
h , h ,ω
ω
BN
(v, v ∗ ) = B(w, w∗ ) ≤ δ1 ||w||H 1 (Ω) ||w∗ ||H 1 (Ω)
= δ1 ||v||
! ||v ∗ ||
Ã
1
HN
(+)(−)
h h ,ω
Ã
(+) (−)
1
HN
!
.
(3.67)
h , h ,ω
ω
The condition
that FN
(·) is a bounded linear functional on
¶
µ (3.64) implies
(+) (−)
1
the space HN
h , h , ω, γ as can be seen as follows:
FNω (v ∗ )
=
3
N µ
X
X
i=1 ri =0
1
ri +
2
¶Z
1
∗
ψiri hri + 2 vir
dω ,
i
(3.68)
ω
¶1/2
µ
¶1/2
1
1
1
∗
≤
ri +
||ψiri ||L2 (ω) || ri +
hri + 2 vir
||
i L2 (ω)
2
2
i=1 ri =0
¶1/2
3
N µ
´
³X
X
1
≤
ri +
||ψiri ||L2 (ω) ||v ∗ || Ã(+) (−) ! ,
2
H1
h , h ,ω
N
i=1 r =0
ω
|FN
(v ∗ )|
3
N µ
X
X
i
since
¶1
°µ
1 2 ri + 1 ∗ °
°
°
h 2 viri °
≤ ||v ∗ || Ã(+) (−) !
° ri +
2
L2 (ω)
H1
h , h ,ω
N
for ri = 0, N and i = 1, 2, 3 .
So, taking into account
µ
1
ri +
2
¶ 12
µ
≤
1
N+
2
¶ 12
,
we get
ω
(v ∗ )|
|FN
¶1 3 N
hµ
i
1 2X X
≤
N+
||ψiri ||L2 (ω) ||v ∗ || Ã(+) (−) ! .
2
H1
h , h ,ω
N
i=1 r =0
(3.69)
i
Now, Remark 3.6 along with the Lax–Milgram lemma completes the proof. 2
30
REMARK 3.9 If fi ∈ L2 (Ω) then for almost every x ∈ ω:
fi (x1 , x2 , x3 ) =
∞ µ
X
ri =0
and
1
ri +
2
¶
afiri (x)Pri (ax3 − b)
1
h− 2 firi ∈ L2 (ω) for i = 1, 2, 3 and ri = 0, ∞ ,
(3.70)
due to the inequalities
N µ
X
ri =0
1
ri +
2
¶Z
Z
2
|fi |2 dΩ for i = 1, 2, 3.
a |firi | dω ≤
ω
Ω
In this case, (3.64) is equivalent to the conditions
s
µ
¶
1
h− 2
"r
h
− 12
(±)
1+ ∇h
r
(+)
1 + (∇ h )2 gi+ +
2
gi± ∈ L2 (ω)
for N ≥ 1 , (3.71)
#
(−)
1 + (∇ h )2 gi− ∈ L2 (ω)
for N = 0. (3.72)
Clearly, (3.71) implies
gi± ∈ L2 (ω).
(3.73)
For the reader’s convenience here we present the following technical lemma.
LEMMA 3.10 Let Ω be a Lipschitz domain described in (6.1). The union
∞ ∼
∪ V N1 (Ω, Γ) is dense in H 1 (Ω, Γ).
N1 =0
Proof. We shall prove the lemma in three steps.
Step 1. For f ∈ C([0, 1]) and any ε > 0 there exists δ = δ(ε) > 0 such that
|f (ξ 00 ) − f (ξ 0 )| ≤ ε if |ξ 0 − ξ 00 | < δ,
due to the uniform continuity of the function f. Denote by Bn (ξ) the Bernstein
polynomial corresponding to the function f :
¶
n µ
X
k
n
(3.74)
Bn (f ; ξ) =
f ( ) ξ k (1 − ξ)n−k for ξ ∈ [0, 1] and n ∈ N .
k
n
k=0
Then (see the proof of Bernstein’s theorem in [57, Ch.4, Section 5]) we have
the following estimate:
|Bn (f ; ξ) − f (ξ)| ≤ ε +
M
for ξ ∈ [0, 1],
2nδ 2
31
(3.75)
where M := max|f (ξ)|.
[0,1]
In addition, we assume that f is not constant, f ∈ C 1 ([0, 1]), and
M 0 := max|f 0 (ξ)| > 0.
[0,1]
(3.76)
The case M 0 = 0 is trivial as will be shown below at the end of Step 1.
It is evident that we can choose δ as
δ=
ε
.
M0
(3.77)
The relations (3.75) and (3.77) give
|Bn (f ; ξ) − f (ξ)| ≤ ε +
M (M 0 )2
for ξ ∈ [0, 1] and ε > 0 .
2nε2
(3.78)
M0
Substitution ε = √
leads to the inequality
3
n
1
1
|Bn (f ; ξ) − f (ξ)| ≤ √
(M 0 + M )
3
2
n
(3.79)
for ξ ∈ [0, 1] and every n ∈ N.
Further, if f ∈ C 1 ([d1 , d2 ]), then (3.79) implies
³
´
en (f ; ξ) − f (ξ)| ≤ √1 1 M
f + (d2 − d1 )M
f0 ,
|B
3
n 2
(3.80)
where
¶ ³
n µ
X
k´
n
en (f ; ξ) =
B
f d1 + (d2 − d1 )
k
n
k=0
×
³ ξ − d ´k ³ d − ξ ´n−k
2
1
,
d2 − d1
d2 − d1
f = max |f (ξ)|, M
f0 = max |f 0 (ξ)| .
M
[d1 ,d2 ]
Put
½
max
[d1 ,d2 ]
¾
1
, (d2 − d1 ) = C ∗ .
2
(3.81)
(3.82)
(3.83)
Then (3.80) can be rewritten as
∼
C∗
|B n (f ; ξ) − f (ξ)| ≤ √
||f ||C 1 ([d ,d ]) .
3
1 2
n
32
(3.84)
Remark that if f (ξ) = const =: C, i.e., M 0 = 0 (cf. (3.76)), it is evident that
(3.84) holds, since
∼
B n (ξ, C) = C
for all
n ≥ 0 and ξ ∈ [d1 , d2 ] .
If f ∈ C 0,α ([0, 1]), 0 < α < 1, we can show, analogously, that
µ
¶
1
1
0
|Bn (f ; ξ) − f (ξ)| ≤ α
M + M ,
2
n α+2
where
|f (ξ) − f (η)|
.
|ξ − η|α
0≤ξ,η≤1
0
M := max |f (ξ)|, M := sup
[0,1]
Step 2. Let ϕ be an arbitrary element of H 1 (Ω, Γ).
Due to Lemma 1.10 in [45], for any ε > 0 there exists a function ϕ
e ∈ H 1 (Ω)
such that the projection of supp ϕ
e onto the plane Ox1 x2 is a subset of ω, i.e.,
ϕ
e vanishes in some three–dimensional neighbourhood of the set Γ̄ ∪ γ̄0 , and
∼
kϕ − ϕkH 1 (Ω) ≤
ε
.
3
(3.85)
Now, choose constants d1 and d2 such that
Ω ⊂ Ω0 := ω × (d1 , d2 ).
Denote
Γ̃0 = γ × (d1 , d2 ).
∼
Further, let Φ ∈ H 1 (Ω0 , Γ̃0 ) be some extension of ϕ onto Ω0 (see, e.g., [49,
Theorem A1]). Due to the density property of C ∞ (Ω0 , Γ̃0 ) in H 1 (Ω0 , Γ̃0 ) there
exists a function ψ ∈ C 3 (Ω̄0 ) such that
ε
kΦ − ψkH 1 (Ω0 ) ≤ ,
3
(3.86)
and ψ vanishes in some three-dimensional neighbouhood of Γ̃0 .
Our goal is to construct a polynomial in the variable x3 ,
ψn (x, x3 ) =
n
X
qk (x)xk3 ∈ C 1 (Ω̄0 ),
(3.87)
k=0
with
qk ∈ C 1 (ω̄)
and
such that
kψ − ψn kC 1 (Ω̄0 ) ≤
33
qk |ωδ = 0,
ε
,
3(mes Ω0 )1/2
(3.88)
(3.89)
where ωδ is some two–dimensional δ–neighbourhood of ∂ω (with sufficiently
small δ > 0).
It is easy to see that this leads to the proof of the lemma. Indeed, from
(3.85), (3.86), and (3.82) it follows that
∼
kϕ − ψn kH 1 (Ω) ≤ kϕ − ϕkH 1 (Ω) + kΦ − ψn kH 1 (Ω0 )
∼
≤ kϕ − ϕkH 1 (Ω) + kΦ − ψkH 1 (Ω0 ) + kψ − ψn kH 1 (Ω0 )
≤
2ε
2ε ε
+ (mes Ω0 )1/2 kψ − ψn kC 1 (Ω̄0 ) ≤
+ = ε,
3
3
3
since
kχkH 1 (Ω0 ) ≤ (mes Ω0 )1/2 kχkC 1 (Ω̄0 ) for χ ∈ C 1 (Ω̄0 ) .
Taking into consideration that the Legendre polynomials {Pk }nk=0 generate a basis in the set of polynomials of degree m with m ≤ n, we see that
∼
ψn ∈ V N (Ω, Γ) due to (3.88), and the lemma would be shown provided the
polynomial (3.87) were constructed.
Step 3. To this end let us consider the polynomial
¶ ³
µ
´
n−1
P
n
−
1
k
f x, d1 + (d2 − d1 ) n−1
ψen−1 (x, x3 ) =
k
k=0
³ x − d ´k ³ d − x ´n−k−1
3
1
2
3
×
,
d2 − d1
d2 − d1
where n ≥ 2 and
f (x, x3 ) =
∂ψ(x, x3 )
.
∂x3
(3.90)
(3.91)
Evidently,
f ∈ C 2 (Ω0 ).
By (3.84) we obtain
°
°
∼
° ∂ψ
°
C∗
°
°
√
−
ψ
≤
kψkC 2 (Ω0 ) .
n−1 °
3
° ∂x3
n−1
C(Ω0 )
Introduce
Zx3 ∼
ψn (x, x3 ) := ψ(x, d1 ) + ψ n−1 (x, t)dt.
(3.92)
(3.93)
(3.94)
d1
From (3.93),(3.94) there follows
°
°
° ∂ψ
∂ψn °
C∗
°
°
√
−
kψkC 2 (Ω0 ) .
≤
3
° ∂x3
∂x3 °C(Ω0 )
n−1
34
(3.95)
In what follows we prove
C ∗ (d2 − d1 )
√
kψkC 2 (Ω0 ) ,
3
n−1
(3.96)
°
°
° ∂ψ
°
∂ψ
C ∗ (d2 − d1 )
n
°
°
√
−
≤
kψkC 3 (Ω0 ) for α = 1, 2 .
3
° ∂xα ∂xα °
n−1
C(Ω0 )
(3.97)
kψ − ψn kC(Ω0 ) ≤
First let us note that, by virtue of (3.94) and (3.90), we have
¶
n−1 µ
∂ ³ ∂ψn (x, x3 ) ´ X n − 1
=
k
∂xα
∂x3
k=0
³
k ´³ x3 − d1 ´k ³ d2 − x3 ´n−k−1
×f,α x, d1 + (d2 − d1 )
,
n − 1 d2 − d1
d2 − d1
B̃n−1 (ψ,3α (x, .); x3 ) = ψn,3α (x, x3 ) ,
(3.98)
due to (3.91). In view of (3.84) and (3.98) we get
C∗
kψ,3α − ψn,3α kC(Ω0 ) ≤ √
kψkC 3 (Ω0 ) .
3
n−1
Applying the relations
(3.99)
ψn,α (x, d1 ) = ψ,α (x, d1 ) ,
Zx3
ψ(x, x3 ) − ψ(x, d1 ) =
ψ,3 (x, t)dt ,
d1
Zx3
ψ,α (x, x3 ) − ψn,α (x, x3 ) = [ψ,3α (x, t) − ψn,3α (x, t)]dt
d1
along with (3.93), (3.94), and (3.99) we conclude
¯ Zx3
¯
∼
¯
¯
|ψ(x, x3 ) − ψn (x, x3 )| = ¯ [ψ,3 (x, t) − ψ n−1 (x, t)]dt¯
d1
≤
C ∗ (d2 − d1 )
√
kψkC 2 (Ω0 ) ,
3
n−1
Zx3
√
3
|ψ,α (x, x3 ) − ψn,α (x, x3 )| ≤
d1
≤
C∗
kψkC 3 (Ω0 ) dt
n−1
C ∗ (d2 − d1 )
√
kψkC 3 (Ω0 ) ,
3
n−1
35
(3.100)
(3.101)
which coincide with (3.96) and (3.97).
Combining the estimates (3.95), (3.96), and (3.97) we obtain
kψ − ψn kC 1 (Ω0 ) ≤
3C ∗ (d2 − d1 )
√
kψkC 3 (Ω0 ) .
3
n−1
(3.102)
Taking n sufficiently large,
!3
Ã
9(mes Ω0 )1/2 C ∗ kψkC 3 (Ω0 )
,
n≥1+
ε
we get the inequality (3.89).
It is evident that ψn given by (3.94) can be represented in the form (3.87)
with qk satisfying conditions (3.88), because of f (x, x3 ) = 0 for x ∈ ωδ since
ψ vanishes in some three–dimensional neighbourhood of Γ̃0 . The proof is
completed. 2
3.5
Convergence results
THEOREM 3.11 Assume that
(±)
f ∈ L2 (Ω) and h−1/2 [1 + (∇ h )2 ]1/2 g ± ∈ L2 (ω) .
N
(3.103)
(+) (−)
1
For N ∈ N30 let v ∈ HN
( h , h , ω, γ) be the unique solution to the problem
∼
N
ω
(IN
) (see (3.63)) and let w ∈ V N (Ω, Γ) ⊂ H 1 (Ω, Γ) be the corresponding vector
constructed by (7.56), which represents a solution to the variational problem
(7.58).
Finally, let u ∈ H 1 (Ω, Γ) be the unique solution of the three-dimensional
variational problem (2.20).
Then
N
kw − ukH 1 (Ω) → 0 as Nmin := min {N1 , N2 , N3 } → +∞.
(3.104)
N
Proof. By standard arguments it can be shown that v minimizes the functional
µ
¶
(+) (−)
1 ω
1
ω
JN (v) := BN (v, v) − FN (v) where v ∈ HN h , h , ω, γ , (3.105)
2
µ
¶
(+) (−)
N
1
i.e.,
JN ( v) ≤ JN (v) for all v ∈ HN h , h , ω, γ .
(3.106)
Note that (cf. (7.58) and (3.63))
ω N
BN
( v, v)
=
ω
FN
(v)
µ
N
= F(w) = B(w, w) for v ∈
36
1
HN
(+) (−)
h , h , ω, γ
¶
; (3.107)
here and in what follows w corresponds to v via the formula (7.56) and is an
∼
arbitrary element of the space V N (Ω, Γ).
Further, with the help of (3.105)–(3.107) and (2.20) we find
N
N
N
N N
B(u − w, u − w) = B(u, u) − 2B(u, w) + B(w, w)
N
N N
N
N
ω
ω
ω
= B(u, u) − 2F(w) + BN
( v, v) − 2FN
( v) + 2FN
( v)
N
N
ω
ω
ω
( v)
(v) + 2FN
(v, v) − 2FN
≤ B(u, u) − 2F(w) + BN
= B(u, u) + B(w, w) − 2B(u, w)
= B(u − w, u − w)
∼
for all w ∈ V N (Ω, Γ) ,
that is,
N
∼
N
B(u − w, u − w) ≤ B(u − w, u − w) for all w ∈ V N (Ω, Γ) .
(3.108)
From (3.108) and the coerciveness of the bilinear form B (see (2.27)) it
follows that
N
N
N
δ2 ku − wk2H 1 (Ω,Γ) ≤ B(u − w, u − w) ≤ εN
(3.109)
with
∼
εN := inf B(u − w, u − w) ≥ 0 for all w ∈ V N (Ω, Γ) .
(3.110)
0
Since VeN (Ω, Γ) ⊂ VeN0 (Ω, Γ) for Ni ≤ Ni (i = 1, 2, 3), we conclude that
εN ≥ εN0 , and, therefore, there exists the limit
lim
Nmin →+∞
εN = ε ≥ 0.
Due to (3.109) it remains to show that ε = 0. We prove it by contradiction.
Assume that ε > 0.
Note that, under our assumption
εN ≥ ε > 0 for all N ∈ N30 .
By Lemma 3.10, the union
[
VeN (Ω, Γ) is dense in H 1 (Ω, Γ) .
(3.111)
(3.112)
N
Because of (3.112), there exists a vector–function w0 and a vector N0 , such
that
ε
w0 ∈ VeN0 (Ω, Γ) and kw0 − uk2H 1 (Ω) <
2δ1
with the same δ1 > 0 as in (2.26). Therefore,
ε
εN0 ≤ B(u − w0 , u − w0 ) ≤ δ1 ku − w0 k2H 1 (Ω) ≤ ,
2
37
which contradicts (3.111). Thus, ε = 0 and the result follows. 2
Note that if h(x) 6= 0 for x ∈ ω̄, then there holds the following known result
(see [3])
N
ku − wk2H 1 (Ω) ≤ N −(2s−3) q(N ), with N1 = N2 = N3 = N,
(3.113)
N
where u and w are as in Theorem 3.11 and in addition u ∈ H s (Ω) with s ≥ 2;
(+)
(−)
here q(N ) → 0 as N → +∞. In the case h = − h = h = const > 0 :
N
ku − wk2H 1 (Ω) ≤
h2(s−1)
q(N ).
N 2s−3
The approach developed in [3] is essentially based on the fact that in the
case of non-cusped shells the Fourier-Legendre coefficients of the solution u ∈
H 1 (Ω) automatically belong to the space H 1 (ω), which implies that the partial
sums of the corresponding Fourier–Legendre series belong to the space H 1 (Ω).
In the case of cusped prismatic shells, in general, as has been shown above,
the Fourier–Legendre coefficients and the corresponding partial sums do not
belong to the spaces H 1 (ω) and H 1 (Ω), respectively. Therefore, the above
approach needs some modifications.
N
THEOREM 3.12 Let u and w be as in Theorem 3.11 and, in addition, let
the conditions
(±)
(±)
h−1 u , h−1 h,α u , h,α u,3 , h1/2
∗ u ∈ L2 (Ω) for α = 1, 2 ,
(3.114)
be fulfilled with
−4
h∗ := h
h1
3
h2,α
³ (+) (+) (−) (−) ´ ³(+)
(+) ´2 i
2
2
h + h h + h + h,α h − h,α h
.
(3.115)
Moreover, let
∂3k ui ∈ L2 (Ω) for k = 0, s,
∂3p ∂α ui ∈ L2 (Ω) for p = 0, s − 1 , and s ≥ 2,
h,α ∂3m ui , e
h,α ∂3m ui ∈ L2 (Ω) for m = 1, s
with h and e
h given by (6.2) and (2.32), respectively.
Then
¯¯
¯¯
h2s−2
N ¯¯2
¯¯
¯¯u − w¯¯ 1 ≤ 02s−3 q(N),
H (Ω)
Nmin
where N − Nmin ≤ C0 with some constant C0 independent of N and
h0 := max h(x)
x∈ω
and q(N) → 0 as Nmin → ∞ .
38
(3.116)
(3.117)
(3.118)
(3.119)
Proof. The conditions (3.114) (which are sufficient) imply that the partial
Fourier-Legendre sums SNi (ui ) of the components ui , i.e.,
SNi (ui )(x, x3 ) :=
N
¡
¢
P
a r + 12 ui r (x)Pr (ax3 − b)
r=0
(3.120)
for Ni = 0, ∞, i = 1, 2, 3,
where
(+)
Zh
ui (x, x3 )Pr (ax3 − b)dx3 for r = 0, ∞ ,
uir (x) :=
(3.121)
(−)
h
belong to the space VeNi (Ω, Γ) ⊂ H 1 (Ω, Γ).
Introduce
εNi (x, x3 ) := ui (x, x3 ) − SNi (ui )(x, x3 )
µ
¶
∞
X
1
=
a r+
ui r (x)Pr (ax3 − b) .
2
r=N +1
(3.122)
i
Our goal is to estimate the norm of εNi in the space H 1 (Ω). Applying the
recurrence formula
¤
1 £ 0
0
Pr (t) =
Pr+1 (t) − Pr−1
(t) for r ≥ 1 ,
2r + 1
we get from (3.121)
uir (x) =
h
i
1
(∂3 ui )r−1 − (∂3 ui )r+1 for r = 1, ∞ .
a(2r + 1)
(3.123)
With the help of (3.123) we obtain
µ
µ
¶1/2 ¯¯
¶1/2
r+s ¯¯
¯¯2
¯¯
X
1
1
c h2s
¯¯
¯¯2
¯¯ −1/2
¯¯ −1/2
0
l+
r+
≤ 2s
uir ¯¯
(∂3s ui )l ¯¯
¯¯h
¯¯h
2
r l=r−s
2
L2 (ω)
L2 (ω)
(3.124)
with c = 22s−1 (2s + 1)[(s − 1)!]2 .
By the Parseval equality along with some additional calculations we arrive
at the relations
Z
∞
¯¯ ¯¯2
³
X
1´
¯¯ ¯¯
=
h−1 r +
(uir )2 dω ,
(3.125)
¯¯εNi ¯¯
2
L2 (Ω)
r=N +1
i
¯¯2
¯¯
¯¯
¯¯
¯¯∂3 εNi ¯¯
L2 (Ω)
=
∞ Z
X
r=Ni ω
ω
−1
h
³
1´
r+
[(∂3 ui )r ]2 dω
2
39
Z
Ni (Ni − 1)
+
4
+
h−1 [(∂3 ui )N ]2 dω
Zω
Ni (Ni + 1)
4
h−1 [(∂3 ui )Ni +1 ]2 dω,
(3.126)
ω
¯¯2
¯¯
¯¯
¯¯
∂
ε
¯¯ α Ni ¯¯
Z
∞
n X
³
1´
h−1 r +
[(∂α ui )r ]2 dω
2
L2 (Ω)
r=Ni −1 ω
Z
hZ
∼
2
−1
2
+Ni
h [(h,α ∂3 ui )Ni ] dω + h−1 [(h,α ∂3 ui )Ni ]2 dω
≤ 2
Z
ω
Z
2
−1
+
−1
h [(h,α ∂3 ui )Ni +1 ] dω +
ω
ω
∼
2
h [(h,α ∂3 ui )Ni +1 ] dω
io
(3.127)
ω
with h and e
h given by (6.2) and (2.32), respectively.
From (3.125) and (3.124), there follows
¯¯ ¯¯2
¯¯ ¯¯
¯¯εNi ¯¯
L2 (Ω)
h2s
0
qi1 (Ni )
Ni2s
≤
(3.128)
with h0 given by (3.119); here and in what follows qij (Ni ) → 0 as Ni → ∞.
Further, by virtue of (3.126) and (3.123) we get
¯¯
¯¯2
¯¯
¯¯
¯¯∂3 εNi ¯¯
L2 (Ω)
≤
h2s−2
0
qi2 (Ni ).
Ni2s−3
(3.129)
In view of conditions (3.116) and (3.117) we analogously derive the estimate
¯¯
¯¯2
¯¯
¯¯
¯¯∂α εNi ¯¯
L2 (Ω)
≤
h2s−2
0
qi3 (Ni ) for α = 1, 2 .
Ni2s−3
(3.130)
Combining (3.128)–(3.130) we have
3 ¯¯
¯¯
X
¯¯ ¯¯2
¯¯εNi ¯¯
i=1
H 1 (Ω)
≤
h2s−2
0
2s−3 q4 (N)
Nmin
(3.131)
with q4 (N) → 0 as Nmin → ∞.
Invoking the inequality (3.108) with
∼
w = (SN1 (u1 ), SN2 (u2 ), SN3 (u3 )) ∈ V N (Ω, Γ)
and taking into consideration the coerciveness and boundedness properties of
the bilinear form B(·, ·) we obtain inequality (3.118). 2
40
(+)
(−)
REMARK 3.13 In the symmetric case, i.e., when h = − h = h, conditions
(3.114) are simplified and read as
h−1 u , h−1 h,α u , h,α u,3 ∈ L2 (Ω) for α = 1, 2 ,
since in the case under consideration h∗ =
1
3
³
h,α
h
´2
(3.132)
.
REMARK 3.14 In the particular case of power degeneration, i.e., when
(+)
(−)
h = − h = h = c0 xκ2 with constants c0 > 0 and 0 ≤ κ ≤ 1, the conditions (3.132) have the form
−1
κ−1
x−κ
u,3 ∈ L2 (Ω) .
2 u , κx2 u , κx2
4
4.1
(3.133)
Derivation of the basic system of two–dimensional models
The case of general systems
By virtue of (2.20) we obtain
N N
N
B( u, v) = F( v) for all
N
vi
Ni
X
=
N
V imi (x)Pmi (ax3 − b),
(4.1)
mi =0
where Pmi (·) is a general system on [−1, 1] and
N
u i (x1 , x2 )
=
Ni
X
N
U iki (x)Pki (ax3 − b).
(4.2)
ki =0
According to (2.21), (4.2), and (4.1), we have
(+)
Z
N N
B( u, v) =
Zh
ω
(+)
Zh
Zh
N N
σiα ( u) v i,α dx3
h
41
h
(+)
Zh
N N
σi3 ( u) v i,3 dx3
dω
ω
(−)
(−)
Z
+
N N
σij ( u) v i,j dx3
dω
ω
h
dω
ω
N
(−)
Z
=
N
σij ( u)eij ( v)dx3 =
dω
(+)
Z
(−)
h
(+)
Z
Zh
=
N N
σi3 ( u) v i,3 dx3
dω
ω
Z
N N
σiα ( u) v i nα dS
+
S + ∪S −
(−)
h
(+)
Zh
Z
ω
N N
σiα,α ( u) v i dx3 .
dω
−
(4.3)
(−)
h
Let
(+)
Z
Zh
I1 := −
ω
N N
σiα,α ( u) v i dx3 ,
dω
(−)
h
Z
N N
σiα ( u) v i nα dS , I3 :=
I2 :=
(+)
Z
Zh
ω
S + ∪S −
N N
σi3 ( u) v i,3 dx3 .
dω
(−)
h
Due to Hooke’s law (6.9) we have
N
σiα ( u) = λδiα
Nl
X
N
(U lkl (x)Pkl (ax3 − b)),l
kl =0
+µ
Ni
nX
N
(U iki (x)Pki (ax3 − b)),α +
ki =0
Nα
X
o
N
(U αkα (x)Pkα (ax3 − b)),i .
kα =0
By direct calculations, we obtain
N N
σiα,α ( u) v i
Nl
Ni
nX
h
X
N
(Uiki Pki (ax3 − b)),αα
= λδiα
(U lkl Pkl (ax3 − b)),lα + µ
ki =0
kl =0
+
Nα
X
oi
N
(U αkα Pkα (ax3 − b)),iα
=
N
V imi Pmi (ax3 − b)
mi =0
kα =0
Ni
X
Ni
X
Nl n
h
X
N
N
λδiα
U lkl ,lα (x)Pkl (ax3 − b) + U lkl ,l (x) (Pkl (ax3 − b)),α
mi =0
N
kl =0
o
N
+U lkl ,α (x) (Pkl (ax3 − b)),l + U lkl (x) (Pkl (ax3 − b)),lα
Ni n
X
N
N
+µ
U iki ,αα (x)Pki (ax3 − b) + 2U iki ,α (x) (Pki (ax3 − b)),α
ki =0
42
o
N
+U iki (x) (Pki (ax3 − b)),αα
Nα n
X
N
N
+µ
U αkα ,iα (x)Pkα (ax3 − b) + U αkα ,i (x) (Pkα (ax3 − b)),α
kα =0
N
oi
N
+U αkα ,α (x) (Pkα (ax3 − b)),i + U αkα (x) (Pkα (ax3 − b)),iα
N
×Pmi (ax3 − b)V imi (x).
(4.4)
Let us introduce the notation
(+)
Zh
(p,ij)
(Pp (ax3 − b)),ij (Pq (ax3 − b)),kl dx
P(q,kl) :=
(4.5)
(−)
h
for i, j, k, l, p, q = 1, 2, 3 ,
(±)
n3= r
(±)
±1
nα= r
,
(±)
,
(4.6)
(±)
1 + (∇x h )2
1 + (∇x h )2
r
r
dS =
∓ h ,α
(±)
(±)
(±)
1 + ( h ,1 )2 + ( h ,2 )2 dx =
(±)
1 + (∇x h )2 dx .
Invoking (4.4) and (4.5), we obtain
I1 = −
Ni Z h
X
Nl ½
X
N
N
(k ,00)
(k ,0α)
λδiα
U lkl ,lα P(mli ,00) + U lkl ,l P(mli ,00)
mi =0 ω
+
N
(k ,0l)
U lkl ,α P(mli ,00)
kl =0
+
¾
N
(k ,lα)
U lkl P(mli ,00)
¾
Ni ½
X
N
N
N
(ki ,00)
(ki ,0α)
(ki ,αα)
+µ
U iki ,αα P(mi ,00) + 2U iki ,α P(mi ,00) + U iki P(mi ,00)
ki =0
Nα ½
X
N
N
(kα ,00)
(kα ,0α)
+µ
U αkα ,iα P(mi ,00) + U αkα ,i P(mi ,00)
kα =0
+
N
(kα ,0i)
U αkα ,α P(mi ,00)
+
N
(kα ,iα)
U αkα P(mi ,00)
¾i
N
V imi dω .
Further, taking into account (4.6), we get
r
Z h
i
(+)
N N (+)
1 + (∇x h )2 dx
I2 =
σiα ( u) v i n α
(+)
ω
x3 = h (x)
43
(4.7)
Z h
i
N N (−)
+
σiα ( u) v i n α
r
(−)
1 + (∇x h )2 dx
(−)
x3 = h (x)
ω
Z h
i
N N (+)
=−
σiα ( u) v i h ,α
ω
(+)
x3 = h (x)
Z h
i
N N (−)
dx +
σiα ( u) v i h ,α
(−)
x3 = h (x)
ω
dx. (4.8)
Note that
h
iN
N
N
N
N N
σiα ( u) v i = λδiα u l,l + µ( u i,α + u α,i ) v i
h
= λδiα
Nl
X
N
{U lkl (x)Pkl (ax3 − b)},l + µ
kl =0
+µ
Nα
X
Ni
X
N
{U iki (x)Pki (ax3 − b)},α
ki =0
i
N
Ni
X
{U αkα (x)Pkα (ax3 − b)},i
N
V imi (x)Pmi (ax3 − b) .
(4.9)
mi =0
kα=0
In view of (4.9), from (4.8) we find
I2 = −
Ni Z
X
Nl
h
X
N
{U lkl ,l (x)Pkl (1)
h ,α (x) λδiα
(+)
mi =0 ω
N
+U lkl (x)(Pkl (ax3
+µ
Ni
X
kl =0
¯
¯
− b)),l ¯
(+)
x3 = h (x)
}
N
{U iki ,α (x)Pki (1)
ki =0
¯
¯
+U iki (x)(Pki (ax3 − b)),α ¯
N
(+)
x3 = h (x)
+µ
Nα
X
}
N
{U αkα ,i (x)Pkα (1)
kα =0
¯
N
¯
+U αkα (x)(Pkα (ax3 − b)),i ¯
+
Ni
X
(+)
x3 = h (x)
Z
h
h ,α (x) λδiα
(−)
mi =0 ω
N
Nl
X
N
{U lkl ,l (x)Pkl (−1)
kl =0
¯
¯
+U lkl (x)(Pkl (ax3 − b)),l ¯
(−)
x3 = h (x)
+µ
Ni
X
}
¯
¯
{U iki ,α (x)Pki (−1) + U iki (x)(Pki (ax3 − b)),α ¯
N
N
Nα
X
(−)
x3 = h (x)
ki =0
+µ
iN
} V imi (x)Pmi (1)dx
¯
N
N
¯
{U αkα ,i (x)Pkα (−1) + U αkα (x)(Pkα (ax3 − b)),i ¯
kα =0
44
}
i
(−)
x3 = h (x)
}
N
×V imi (x)Pmi (−1)dx .
(4.10)
By virtue of Hooke’s law (6.9), we have
(+)
Z
I3 =
Zh h
dω
ω
=
³N
´i N
N
N
λδi3 u l,l + µ u i,3 + u 3,i v i,3 dx3
(−)
h
(+)
Ni Z
X
Zh h
Nl
X
N
dω
λδi3
{U lkl ,l (x)Pkl (ax3 − b)
mi =0 ω
kl =0
(−)
h
N
+U lkl (x) (Pkl (ax3 − b)),l }
+µ
Ni
X
N
{U iki (x) (Pki (ax3 − b)),3 }
ki =0
+µ
N3
X
N
i
N
{U 3k3 ,i (x) Pk3 (ax3 − b) + U 3k3 (x) (Pk3 (ax3 − b)),i }
k3 =0
N
×V imi (x) (Pmi (ax3 − b)),3 dx3 .
(4.11)
From (4.11) in view of (4.5) we get
Nl
Ni Z h
X
X
N
N
(k ,0l)
(k ,00)
I3 =
λδi3
{U lkl ,l (x)P(mli ,03) (x) + U lkl (x)P(mli ,03) }
mi =0 ω
+µ
Ni
X
N
kl =0
N3
X
(k ,03)
{U iki P(mii ,03) } + µ
ki =0
iN
N
N
(k ,00)
(k ,0i)
{U 3k3 ,i P(m3i ,03) + U 3k3 P(m3i ,03) } V imi dω . (4.12)
k3 =0
Taking into account (2.22), we have
Z
Z
Z
N
N
N
+ N
F( v) = − f · v dΩ + g · v dS + g − · v dS
Ω
(+)
Z
=−
S−
S+
Zh
dω
ω
Ni
X
fi
(−)
N
V imi (x)Pmi (ax3 − b)dx3
mi =0
h
Z
gi+ (x)
+
ω
Ni
X
r
N
V imi Pmi (1)
mi =0
45
(+)
1 + (∇x h )2 dω
Z
gi− (x)
+
N
V imi Pmi (−1)
(−)
1 + (∇x h )2 dω
mi =0
ω
=
r
Ni
X
Ni Z h
X
(+)
Zh
−
mi =0 ω
fi (x, x3 )Pmi (ax3 − b)dx3
(−)
h
r
(+)
1 + (∇x h )2
r
+Pmi (1) gi+
+Pmi (−1)gi−
(−) i N
1 + (∇x h )2 V imi (x)dω .
(4.13)
From (4.1) and (4.3) it follows that
N N
N
N
∼
I1 + I2 + I3 = B( u, v) = F( v) for all v ∈ V N (Ω).
(4.14)
N
Because of the arbitrariness of V imi , by substitution of (4.7), (4.10), (4.12),
and (4.13) in (4.14), we get
Nl n
o
h
X
(k ,lα) N
(k ,0l) N
(k ,0α) N
(k ,00) N
P(mli ,00) U lkl ,lα + P(mli ,00) U lkl ,l + P(mli ,00) U lkl ,α + P(mli ,00) U lkl
− λδiα
kl =0
+µ
Ni
X
o
n
(ki ,αα) N
(ki ,0α) N
(ki ,00) N
P(mi ,00) U iki ,αα + 2P(mi ,00) U iki ,α + P(mi ,00) U iki
ki =0
+µ
Nα n
X
(k ,00) N
P(mαi ,00) U αkα ,iα
+
(k ,0α) N
P(mαi ,00) U αkα ,i
+
(k ,0i) N
P(mαi ,00) U αkα ,α
kα =0
Nl n
h
o
X
(+) ³
N
N
+
− Pmi (1) h ,α λδiα
U lkl ,l Pkl (1) + U lkl (Pkl ,l )
kl =0
+µ
Ni
X
nN
o
N
+
U iki ,α Pki (1) + U iki (Pki ,α )
ki =0
Nα n
o´
X
N
N
+
+µ
U αkα ,i Pkα (1) + U αkα (Pkα ,i )
kα =0
(−)
−Pmi (−1) h ,α
³
Nl n
o
X
N
N
−
λδiα
U lkl ,l Pkl (−1) + U lkl (Pkl ,l )
kl =0
+µ
Ni
X
o
nN
N
−
U iki ,α Pki (−1) + U iki (Pki ,α )
ki =0
46
+
oi
(kα ,iα) N
P(mi ,00) U αkα
Nα n
o´i
X
N
N
−
+µ
U αkα ,i Pkα (−1) + U αkα (Pkα ,i )
kα =0
+λδi3
Nl n
X
o
(k ,0l) N
(k ,00) N
P(mli ,03) U lkl ,l + P(mli ,03) U lkl
kl =0
+µ
N3 n
o
n
o
X
(k ,0i) N
(ki ,03) N
(k ,00) N
P(mi ,03) U iki + µ
P(m3i ,03) U 3k3 ,i + P(m3i ,03) U 3k3
Ni
X
ki =0
k3 =0
r
(+)
Zh
(+)
1 + (∇x h )2
fi Pmi dx3 + Pmi (1)gi+
=−
(−)
h
r
(−)
1 + (∇x h )2 ,
+Pmi (−1) gi−
(4.15)
where i = 1, 2, 3, mi = 0, Ni , and
(Pkl ,i )± := (Pkl ,i (ax3 − b))|
(±)
x3 = h (x)
.
(4.16)
Recall that in equations (4.15) the set of functions {Pk (ax3 − b)}∞
k=0 is an
(−) (+)
arbitrary system on ( h , h ).
4.2
The case of the Legendre polynomials – Vekua’s system
If {Pk (ax3 − b)}∞
k=0 is the system of Legendre polynomials, then
(k,00)
P(`,00) =
δ`k 2
,
a 2` + 1
Pk (1) = 1,
Pk (−1) = (−1)k ,
and from (4.15) we actually get I. Vekua’s system (see [33]).
In what follows we rewrite this system in vector form.
If i = β, from (4.15) we have for β = 1, 2 and mβ = 0, Nβ
−λδβα
Nτ
X
(k ,00) N
P(mτβ ,00) U τ kτ ,τ α
−µ
−
(k ,00) N
P(mββ ,00) U βkβ ,αα
kβ =0
kτ =0
Nτ n
X
Nβ
hX
(k ,0α)
λδβα P(mτβ ,00)
Nτ
hX
kτ =0
i
(kα ,00) N
P(mβ ,00) U αkα ,βα
kα =0
³(+)
(−) ´o N
mβ +kτ
+ λδβα h ,α − (−1)
h ,α U τ kτ ,τ
kτ =0
−λδβα
+
Nα
X
(k ,0τ ) N
P(mτβ ,00) U τ kτ ,α +
N3
X
(k ,03) N
P(m3β ,00) U 3k3 ,α
k3 =0
47
i
−µ
Nβ n
X
(−) o N
(+)
(k ,0α)
2P(mββ ,00) + h ,α − (−1)mβ +kβ h ,α U βkβ ,α
kβ =0
−µ
Nα n
X
(+)
(−) o N
(k ,0α)
P(mαβ ,00) + h ,α − (−1)mβ +kα h ,α U αkα ,β
kα =0
−µ
Nα
X
(k ,0β) N
P(mαβ ,00) U αkα ,α
+µ
kα =0
−λδβ α
N3
X
(k ,00) N
P(m3β ,03) U 3k3 ,β
k3 =0
Nτ n
hX
oN
(+)
(−)
(k ,τ α)
P(mτβ ,00) + h ,α (Pkτ ,τ )+ − (−1)mβ h ,α (Pkτ ,τ )− U τ kτ
kτ =0
+
N3
X
n
oN i
(−)
(+)
(k ,3α)
P(m3β ,00) + h ,α (Pk3 ,3 )+ − (−1)mβ h ,α (Pk3 ,3 )− U 3k3
k3 =0
−µ
Nβ n
X
(+)
(k ,αα)
P(mββ ,00)
+
mβ
+ h ,α (Pkβ ,α ) − (−1)
(−)
−
h ,α (Pkβ ,α ) −
(k ,03)
P(mββ ,03)
oN
U βkβ
kβ =0
−µ
Nα n
X
oN
(−)
(+)
(k ,βα)
P(mαβ ,00) + h ,α (Pkα ,β )+ − (−1)mβ h ,α (Pkα ,β )− U αkα
kα =0
(+)
+µ
N3
X
(k ,0β) N
P(m3β ,03) U 3k3
r
Zh
k3 =0
³ (+)´2
1 + ∇x h
fβ Pmβ (ax3 − b)dx3 + gβ+
=−
(−)
h
r
(−)
+(−1)mβ gβ−
1 + (∇x h )2 .
(4.17)
If i = 3, then for m3 = 0, N3 ,
−µ
N3
X
(k ,00) N
P(m33 ,00) U 3k3 ,αα
k3 =0
m3 +k3
−(−1)
(−)
−µ
N3 ·
X
(k ,0α)
(+)
2P(m33 ,00) + h ,α
k3 =0
¸
N
h ,α U 3k3 ,α + λ
Nτ
X
(k ,00) N
P(mτ3 ,03) U τ kτ ,τ
−µ
kτ =0
Nα
X
(k ,03) N
P(mα3 ,00) U αkα ,α
kα =0
¾
N3 ½
X
(+)
(−)
N
(k3 ,αα)
(k3 ,03)
+
−
m3
−µ
P(m3 ,00) + h ,α (Pk3 ,α ) − (−1) h ,α (Pk3 ,α ) − P(m3 ,03) U 3k3
k3 =0
−µ
Nα ½
X
(k ,3α)
P(mα3 ,00)
(+)
+
m3
+ h ,α (Pkα ,3 ) − (−1)
¾
(−)
−
h ,α (Pkα ,3 )
N
U αkα
kα =0
+λ
Nτ
hX
kτ =0
(k ,0τ ) N
P(mτ3 ,03) U τ kτ +
N3
X
N3
i
X
(k ,03) N
(k ,03) N
P(m33 ,03) U 3k3 + µ
P(m33 ,03) U 3k3
k3 =0
k3 =0
48
r
(+)
Zh
1 + (∇x h )2 + (−1)m3 g3−
f3 Pm3 dx3 + g3+
=−
r
(+)
(−)
1 + (∇x h )2 .
(4.18)
(−)
h
In order to write the whole set of equations in some compact form, let us
introduce the unknown vector
µ
¶T
N
N
N
N
N
N
N
.
(4.19)
U := U 10 , . . . , U 1N1 ; U 20 , . . . , U 2N2 ; U 30 , . . . ; U 3N3
N
By A we denote the operator corresponding to the system (4.17) and (4.18),
N
and represent A as the sum
N
N
(2)
A=A
N
N
+ A(1) + A(0) ,
(4.20)
N
where the operators A(i) for i = 0, 1, 2, contain only the i−th order derivatives
and are (N1 + N2 + N3 + 3) × (N1 + N2 + N3 + 3) matrices. In the sequel we
shall write the elements of these matrices explicitly.
The principal part of the operators in the left–hand side of the system
(4.17), defining the entries of the matrix A(2) , has then the form
−µ
Nβ
X
N
(k ,00)
P(mββ ,00) ∆2 U βkβ
− (λ + µ)
kβ =0
(k ,00) N
P(mαβ ,00) U αkα ,βα
kα =0
Nβ
= −µ
Nα
X
X
N
δkβ mβ κmβ ∆2 U βkβ − (λ + µ)
kβ =0
Nα
X
N
(4.21)
δkα mβ κmβ U αkα ,βα ,
kα =0
for mβ = 0, Nβ and β = 1, 2,
where
κmβ :=
2
and ∆2 is the two–dimensional Laplacian .
(2mβ + 1)a
(4.22)
Hence, for β = 1 and m1 = 0, N1 :
N1
N1
h X
nX
N
N
−κm1 µ
δk1 m1 ∆2 U 1k1 + (λ + µ)
δk1 m1 U 1k1 ,11
k1 =0
+
N2
X
k1 =0
N
oi
δk2 m1 U 2k2 ,12
k2 =0
while for β = 2 and m2 = 0, N2
49
,
(4.23)
N2
N1
h X
nX
N
N
−κm2 µ
δk2 m2 ∆2 U 2k2 + (λ + µ)
δk1 m2 U 1k1 ,21
k2 =0
+
N2
X
k1 =0
N
oi
δk2 m2 U 2k2 ,22
.
(4.24)
k2 =0
Without loss of generality we can take N1 ≤ N2 , so that
m1 = 0, 1, · · · , N1 and m2 = 0, 1, · · · , N1 , N1 + 1, · · · , N2 .
(4.25)
For ` = 0, N 1 , the expressions (4.23) and (4.24) are simplified and can be
rewritten as the two–component vector–function
·
½
¾¸
N
N
N
−κ` µ∆2 U 1` + (λ + µ) U 1`,11 + U 2l,12
·
½
¾¸
N
N
N
−κ` µ∆2 U 2` + (λ + µ) U 1`,21 + U 2`,22
N
U 1`
=: −κ` A(2) (∂x ) N ,
U 2`
(2)
where A(2) (∂x ) := [Akj (∂x )]2×2 denotes the matrix of operators defined by the
left–hand side expressions, i.e.,
∂2
∂2
(2)
,
A
(∂
)
:=
(λ
+
µ)
,
x
12
∂x21
∂x1 ∂x2
∂2
∂2
(2)
(2)
A12 (∂x ) := (λ + µ)
,
A22 (∂x ) := µ∆2 + (λ + µ) 2 .
∂x1 ∂x2
∂x2
(2)
A11 (∂x ) := µ∆2 + (λ + µ)
For ` = N1 + 1, N2 from (4.24), we have
h
i
N
N
N
−κ` µ∆2 U 2` + (λ + µ)U 2`,22 = −κ` Λ2 (∂x )U 2` ,
(4.26)
(4.27)
where
∂2
,
(4.28)
∂x22
The principal part of the operator on the left–hand side of (4.18) has the form
(2)
Λ2 (∂x ) ≡ A22 (∂x ) := µ∆2 + (λ + µ)
N
−κm3 µ∆2 U 3m3 for m3 = 0, N3 .
(4.29)
Now we are able to construct the (N1 + N2 + N3 + 3) × (N1 + N2 + N3 + 3)
N
matrix operator A(2) in the following form,
(11)
Φ
Φ(12) O(1)
N
Φ(21) Φ(22) O(1)
A(2) :=
O(3) O(3) Φ(1)
O(5) O(5) O(6)
50
O(2)
O(2)
,
O(4)
Φ(2) M ×M
(4.30)
where M = N1 + N2 + N3 + 3, and
(kj)
(2)
Φ(kj) = [Φ(pq) ](N1 +1)×(N1 +1) := diag[κ1 , . . . , κN1 +1 ] Akj (∂x )
for k, j = 1, 2 ,
(1)
Φ(1) = [Φ(pq) ](N2 −N1 )×(N2 −N1 ) := diag[κN1 +1 , . . . , κN2 ] Λ2 (∂x ) ,
(2)
Φ(2) = [Φ(pq) ](N3 +1)×(N3 +1) := diag[κ0 , . . . , κN3 ] µ ∆2 (∂x )
(2)
with Akj (∂x ), Λ2 (∂x ), and ∆2 (∂x ) given by (4.26), (4.28), and (4.22), respectively. Here O(i) , i = 1, 6, are appropriate zero matrices.
Let us establish the explicit form of the operator A1 .
If β = 1, the left–hand side in (4.17) becomes for m1 = 0, N1
µ
¶¾
N1 ½
X
(+)
(−)
N
(k1 ,01)
m1 +k1
λP(m1 ,00) + λ h ,1 − (−1)
−
U 1k1 ,1
h ,1
k1 =0
µ
¶¾
N2 ½
X
(+)
(−)
N
(k2 ,01)
m1 +k2
−
λP(m1 ,00) + λ h ,1 − (−1)
U 2k2 ,2
h ,1
k2 =0
−λ
N1
X
(k ,01) N
P(m11 ,00) U 1k1 ,1
k1 =0
−λ
N2
X
k2 =0
−µ
N1
X
(k ,02) N
P(m21 ,00) U 2k2 ,1
N3
X
−λ
(k ,03) N
P(m31 ,00) U 3k3 ,1
k3 =0
½
¾
(+)
(−)
N
(k1 ,01)
m1 +k1
2P(m1 ,00) + h ,1 − (−1)
h ,1 U 1k1 ,1
k1 =0
¾
N1 ½
X
(+)
(−)
N
(k1 ,02)
m1 +k1
−µ
2P(m1 ,00) + h ,2 − (−1)
h ,2 U 1k1 ,2
k1 =0
¾
N1 ½
X
(+)
(−)
N
(k1 ,01)
m1 +k1
−µ
P(m1 ,00) + h ,1 − (−1)
h ,1 U 1k1 ,1
k1 =0
¾
N2 ½
X
(+)
(−)
N
(k2 ,02)
m1 +k2
−µ
P(m1 ,00) + h ,2 − (−1)
h ,2 U 2k2 ,1
k2 =0
−µ
N1
X
(k ,01) N
P(m11 ,00) U 1k1 ,1
−µ
k1 =0
+µ
N3
X
N2
X
(k ,01) N
P(m21 ,00) U 2k2 ,2
k2 =0
(k ,00) N
P(m31 ,03) U 3k3 ,1 .
(4.31)
k3 =0
51
If β = 2, then the left–hand side from (4.17) becomes for m2 = 0, N2 :
−
N1 ½
X
µ
(k ,02)
λP(m12 ,00)
+λ
k1 =0
−
N2 ½
X
h ,2 − (−1)
µ
(k ,02)
λP(m22 ,00)
(+)
+λ
(+)
h ,2 − (−1)
m2 +k1
m2 +k2
(−)
¶¾
(−)
N
U 1k1 ,1
h ,2
¶¾
N
U 2k2 ,2
h ,2
k2 =0
N1
X
− λ
(k ,01) N
P(m12 ,00) U 1k1 ,2
−λ
k1 =0
−λ
N3
X
N2
X
(k ,02) N
P(m22 ,00) U 2k2 ,2
k2 =0
(k ,03) N
P(m32 ,00) U 3k3 ,2
k3 =0
¾
N2 ½
X
(+)
(−)
N
(k2 ,01)
m2 +k2
− µ
2P(m2 ,00) + h ,1 − (−1)
h ,1 U 2k2 ,1
k2 =0
¾
N2 ½
X
(+)
(−)
N
(k2 ,02)
m2 +k2
− µ
2P(m2 ,00) + h ,2 − (−1)
h ,2 U 2k2 ,2
k2 =0
¾
N1 ½
X
(+)
(−)
N
(k1 ,01)
m2 +k1
− µ
P(m2 ,00) + h ,1 − (−1)
h ,1 U 1k1 ,2
k1 =0
¾
N2 ½
X
(+)
(−)
N
(k2 ,02)
m2 +k2
− µ
P(m2 ,00) + h ,2 − (−1)
h ,2 U 2k2 ,2
k2 =0
− µ
N1
X
(k ,02) N
P(m12 ,00) U 1k1 ,1
−µ
N3
X
(k ,02) N
P(m22 ,00) U 2k2 ,2
k2 =0
k1 =0
+µ
N2
X
(k ,00) N
P(m32 ,03) U 3k3 ,2 .
(4.32)
k3 =0
From (4.18) we have the following terms containing the first order derivatives
for m3 = 0, N3 ,
− µ
·
+
+ λ
N3 ½·
X
(k ,01)
2P(m33 ,00)
(+)
m3 +k3
+ h ,1 − (−1)
k3 =0
(k ,02)
2P(m33 ,00)
N1
X
(+)
+ h ,2 − (−1)
(k ,00) N
P(m13 ,03) U 1k1 ,1
+λ
k1 =0
m3 +k3
N2
X
k2 =0
52
(−)
¸
(−)
N
h ,1 U 3k3 ,1
N
h ,2 U 3k3 ,2
(k ,00) N
¸
P(m23 ,03) U 2k2 ,2
¾
− µ
N1
X
(k ,03) N
P(m13 ,00) U 1k1 ,1
−µ
k1 =0
N2
X
(k ,03) N
P(m23 ,00) U 2k2 ,2 .
(4.33)
k2 =0
The expressions (4.31)–(4.33), for i = 1, 2, 3 and mi = 0, Ni , can be written as
¸
N1 ·
X
(i1)
(i1)
∂
∂ N
1
2
+ b mi k1
U 1k1
b mi k1
∂x
∂x2
1
k1 =0
¸
N2 ·
X
(i2)
(i2)
∂
∂ N
1
2
+
+ b mi k2
U 2k2
b mi k2
∂x1
∂x2
k2 =0
¸
N3 ·
X
(i3)
(i3)
∂
∂ N
1
2
+
+ b mi k3
U 3k3 ,
b mi k3
∂x
∂x
1
2
k =0
(4.34)
3
where, for i = β = 1 and kj = 0, Nj , j = 1, 2, 3 , m1 = 0, N1 :
·
¸
(11)
(+)
(−)
(k1 ,01)
1
m1 +k1
b m1 k1 := −(λ + 2µ) 2P(m1 ,00) + h ,1 − (−1)
h ,1 ,
·
¸
(11)
(+)
(−)
(k1 ,02)
2
m1 +k1
b m1 k1 := −µ 2P(m1 ,00) + h ,2 − (−1)
h ,2 ,
·
¸
(+)
(−)
(12)
(k2 ,02)
m1 +k2
b 1
h ,2 ,
m1 k2 := −(λ + µ)P(m1 ,00) − µ h ,2 − (−1)
·
¸
(+)
(−)
(12)
(k2 ,01)
m1 +k2
2
h ,1 ,
b m1 k2 := −(λ + µ)P(m1 ,00) − λ h ,1 − (−1)
(13)
(k ,03)
(k ,00)
1
:= −λP(m31 ,00) + µP(m31 ,03) ,
b
m
k
1
3
(13) 2
b m1 k3 = 0;
while for i = β = 2 and kj = 0, Nj , j = 1, 2, 3 , m2 = 0, N2 :
·
¸
(21)
(+)
(−)
(k1 ,02)
1
m2 +k1
b m2 k1 := −(λ + µ)P(m2 ,00) − λ h ,2 − (−1)
h ,2 ,
·
¸
(21)
(+)
(−)
(k1 ,01)
2
m2 +k1
b m2 k1 := −(λ + µ)P(m2 ,00) − µ h ,1 − (−1)
h ,1 ,
·
¸
(22)
(+)
(−)
(k2 ,01)
1
m2 +k2
b m2 k2 := −µ 2P(m2 ,00) + h ,1 − (−1)
h ,1 ,
·
¸
(22)
(+)
(−)
(k2 ,02)
2
m2 +k2
b m2 k2 := −(λ + 2µ) 2P(m2 ,00) + h ,2 − (−1)
h ,2 ,
(23)
(k ,00)
(k ,03)
(23) 1
2
:= µP(m32 ,03) − λP(m32 ,00) ;
b m2 k3 := 0, b m
2 k3
53
(4.35)
(4.36)
for i = 3 and kj = 0, Nj , j = 1, 2, 3 , m3 = 0, N3 :
(31)
(31)
(k1 ,00)
(k1 ,03)
1
2
b m3 k1 := λP(m3 ,03) − µP(m3 ,00) , b m3 k1 := 0,
(32)
(32)
(k2 ,00)
(k2 ,03)
1
2
:=
0,
b
b m3 k2 := λP(m3 ,03) − µP(m3 ,00) ,
m3 k2
·
¸
(+)
(33)
(−)
(k
,01)
3
1
:= −µ 2P(m3 ,00) + h ,1 − (−1)m3 +k3 h ,1 ,
b m
3 k3
·
¸
(+)
(33)
(−)
(k
,02)
3
2
:= −µ 2P(m3 ,00) + h ,2 − (−1)m3 +k3 h ,2 .
b m
3 k3
(4.37)
N
Thus, the operator A(1) has the block form
N (1)
N (1)
N (1)
A
A
A
11
12
13
N
N (1)
N (1)
N (1)
(1)
A := A21
A22
A23
N (1)
N (1)
N (1)
A31
A32
A33
,
(4.38)
M ×M
N (1)
where M = N1 + N2 + N3 + 3 and the entries of the block matrices Aij are
given by the equalities
µ
¶
(ij)
(ij)
N (1)
∂
∂
2
1
+
= bm
Aij
bm
k
i kj ∂x2
i j ∂x1
(4.39)
mi kj
for mi = 0, Ni , kj = 0, Nj , i, j = 1, 2, 3.
Let us now treat the matrix A0 . From (4.17) for β = 1, we get
−λ
N1 ½
X
(k ,11)
P(m11 ,00)
(+)
+
m1
+
m1
+
m1
+ h ,1 (Pk1 ,1 ) − (−1)
(−)
¾
−
h ,1 (Pk1 ,1 )
k1 =0
−λ
N2 ½
X
(k ,21)
P(m21 ,00)
(+)
+ h ,1 (Pk2 ,2 ) − (−1)
(−)
¾
−
h ,1 (Pk2 ,2 )
k2 =0
−λ
N3 ½
X
(k ,31)
P(m31 ,00)
(+)
+ h ,1 (Pk3 ,3 ) − (−1)
(−)
h ,1 (Pk3 ,3 )
N
U 2k2
¾
−
N
U 1k1
N
U 3k3
k3 =0
¾
N1 ½
X
(+)
(−)
N
(k1 ,αα)
(k1 ,03)
+
m1
−
−µ
P(m1 ,00) + h ,α (Pk1 ,α ) − (−1) h ,α (Pk1 ,α ) − P(m1 ,03) U 1k1
k1 =0
¾
N1 ½
X
(+)
(−)
N
(k1 ,11)
+
m1
−
−µ
P(m1 ,00) + h ,1 (Pk1 ,1 ) − (−1) h ,1 (Pk1 ,1 )
U 1k1
k1 =0
¾
N2 ½
X
(+)
(−)
N
(k2 ,12)
+
m1
−
−µ
P(m1 ,00) + h ,2 (Pk2 ,1 ) − (−1) h ,2 (Pk2 ,1 )
U 2k2
k2 =0
54
+µ
N3
X
(k ,01) N
P(m31 ,03) U 3k3
k3 =0
=
N1
N2
N3
X
X
X
N
N
N
(11)
(12)
(13)
c m1 k1 U 1k1 +
c m1 k2 U 2k2 + µ
c m1 k3 U 3k3 ,
k1 =0
k2 =0
(4.40)
k3 =0
where for m1 = 0, N1 , kj = 0, Nj , j = 1, 2, 3:
½
·
¸
(+)
(−)
(11)
(k1 ,11)
+
m1
−
c m1 k1 := − (λ + 2µ) P(m1 ,00) + h ,1 (Pk1 ,1 ) − (−1) h ,1 (Pk1 ,1 )
·
¸¾
(+)
(−)
(k
,22)
(k
,03)
1
1
+
m
−
+µ P(m1 ,00) + h ,2 (Pk1 ,2 ) − (−1) 1 h ,2 (Pk1 ,2 ) − P(m1 ,03) ,
· ½
¾
(+)
(−)
(12)
(k
,21)
2
+
m
−
1
c m1 k2 := − λ P
h ,1 (Pk2 ,2 )
(m1 ,00) + h ,1 (Pk2 ,2 ) − (−1)
½
¾¸
(+)
(−)
(k2 ,12)
+
m1
−
+µ P(m1 ,00) + h ,2 (Pk2 ,1 ) − (−1) h ,2 (Pk2 ,1 )
,
· ½
¾
(+)
(−)
(13)
(k3 ,31)
+
m1
−
c m1 k3 := − λ P(m1 ,00) + h ,1 (Pk3 ,3 ) − (−1) h ,1 (Pk3 ,3 )
i
(k ,01)
−µP(m31 ,03) .
(4.41)
From (4.17), for β = 2, we have
−λ
N1 ½
X
(k ,12)
P(m12 ,00)
(+)
+
m2
+
m2
+
m2
+ h ,2 (Pk1 ,1 ) − (−1)
¾
(−)
−
h ,2 (Pk1 ,1 )
k1 =0
−λ
N2 ½
X
(k ,22)
P(m22 ,00)
(+)
+ h ,2 (Pk2 ,2 ) − (−1)
¾
(−)
−
h ,2 (Pk2 ,2 )
k2 =0
−λ
N3 ½
X
(k ,32)
P(m32 ,00)
(+)
+ h ,2 (Pk3 ,3 ) − (−1)
−
h ,2 (Pk3 ,3 )
N
U 2k2
¾
(−)
N
U 1k1
N
U 3k3
k3 =0
¾
N2 ½
X
(+)
(−)
N
(k2 ,αα)
(k2 ,03)
+
m2
−
−µ
P(m2 ,00) + h ,α (Pk2 ,α ) − (−1) h ,α (Pk2 ,α ) − P(m2 ,03) U 2k2
k2 =0
¾
N1 ½
X
(+)
(−)
N
(k1 ,21)
+
m2
−
−µ
P(m2 ,00) + h ,1 (Pk1 ,2 ) − (−1) h ,1 (Pk1 ,2 )
U 1k1
k1 =0
−µ
N2 ½
X
(k ,22)
P(m22 ,00)
(+)
+
m2
+ h ,2 (Pk2 ,2 ) − (−1)
k2 =0
55
(−)
h ,2 (Pk2 ,2 )
¾
−
N
U 2k2
+µ
N3
X
(k ,02) N
P(m32 ,03) U 3k3
k3 =0
N1
N2
N3
X
X
X
N
N
N
(21)
(22)
(23)
c m2 k1 U 1k1 +
c m2 k2 U 2k2 + µ
c m2 k3 U 3k3 ,
=
k1 =0
k2 =0
(4.42)
k3 =0
where for m2 = 0, N2 , kj = 0, Nj , j = 1, 2, 3:
· ½
¾
(+)
(−)
(21)
(k1 ,12)
+
m
−
2
c m2 k1 := − λ P(m ,00) + h ,2 (Pk1 ,1 ) − (−1) h ,2 (Pk1 ,1 )
2
½
¾¸
(+)
(−)
(k
,21)
1
+
m
−
+µ P(m2 ,00) + h ,1 (Pk1 ,2 ) − (−1) 2 h ,1 (Pk1 ,2 )
,
·
½
¾
(+)
(−)
(22)
(k
,22)
2
+
m
−
c m2 k2 := − (λ + 2µ) P(m2 ,00) + h ,2 (Pk2 ,2 ) − (−1) 2 h ,2 (Pk2 ,2 )
½
(+)
(−)
(k ,11)
+ µ P(m22 ,00) + h ,1 (Pk2 ,1 )+ − (−1)m2 h ,1 (Pk2 ,1 )−
oi
(k2 ,03)
−P(m2 ,03) ,
· ½
¾
(+)
(−)
(23)
(k
,32)
3
+
m
−
2
c m2 k3 := − λ P(m2 ,00) + h ,2 (Pk3 ,3 ) − (−1) h ,2 (Pk3 ,3 )
i
(k ,02)
−µP(m32 ,03) .
(4.43)
From (4.18) we derive
¾
N3 ½
X
(+)
(−)
N
(k3 ,αα)
(k3 ,03)
+
m3
−
−µ
P(m3 ,00) + h ,α (Pk3 ,α ) − (−1) h ,α (Pk3 ,α ) − P(m3 ,03) U 3k3
k3 =0
¾
Nα ½
X
(+)
(−)
N
(kα ,3α)
+
m3
−
−µ
P(m3 ,00) + h ,α (Pkα ,3 ) − (−1) h ,α (Pkα ,3 )
U αkα
kα =0
"
+λ
Nα
X
(k ,0α) N
P(mα3 ,03) U αkα
kα =0
+µ
N3
X
+
N3
X
#
(k ,03) N
P(m33 ,03) U 3k3
k3 =0
(k ,03) N
P(m33 ,03) U 3k3
k3 =0
=
N1
X
k1 =0
N
(31)
c m3 k1 U 1k1
+
N2
N3
X
X
N
N
(32)
(33)
c m3 k2 U 2k2 +
c m3 k3 U 3k3 ,
k2 =0
k3 =0
56
(4.44)
where
¸
·
(+)
(−)
(31)
(k1 ,31)
+
m
−
c m3 k1 := −µ P(m3 ,00) + h ,1 (Pk1 ,3 ) − (−1) 3 h ,1 (Pk1 ,3 )
(k ,01)
+λP(m13 ,03) ,
·
¸
(+)
(−)
(32)
(k2 ,32)
+
m
−
3
c m3 k2 := −µ P(m ,00) + h ,2 (Pk2 ,3 ) − (−1) h ,2 (Pk2 ,3 )
3
(k ,02)
+λP(m23 ,03) ,
·
¸
(+)
(−)
(33)
(k3 ,αα)
+
m
−
3
c m3 k3 := −µ P(m3 ,00) + h ,α (Pk3 ,α ) − (−1) h ,α (Pk3 ,α )
(k ,03)
+(λ + 2µ)P(m33 ,03) ,
for m3 = 0, N3 , kj = 0, Nj , j = 1, 2, 3 .
(4.45)
N
Thus, for the matrix A(0) we obtain the block form
N
N (0)
N (0)
(0)
A
A12 A13
11
N
N
N (0)
N (0)
(0)
A := A(0)
21 A22 A23
N (0)
A31
N (0)
A32
;
(4.46)
N (0)
A33
M ×M
N (0)
here M = N1 + N2 + N3 + 3 and the Aij are (Ni + 1) × (Nj + 1) matrices with
entries
µ
¶
N (0)
(ij)
= c mi kj for mi = 0, Ni , kj = 0, Nj , i, j = 1, 2, 3.
Aij
(4.47)
mi kj
Finally, from (4.20), (4.19), (4.30), (4.38), (4.46) and (4.17), (4.18) we have
N
N
N
A(∂)U = F ,
where
N
F :=
µ
N
N
N
N
N
N
F 10 , · · · , F 1N1 , F 20 , · · · , F 2N2 , F 30 , · · · , F 3N3
Zh
fi (x, x3 )Pmi (ax3 − b)dx3 + gi+
=−
¶
,
(4.49)
r
(+)
N
F imi
(4.48)
(+)
1 + (∇x h )2
(−)
h
r
+(−1)mi gi−
(−)
1 + (∇x h )2
for mi = 0, Ni and i = 1, 2, 3 .
57
(4.50)
The system (4.48) represents the vector form for the N–th approximation.
For N1 = N2 = N3 = N we have I. Vekua’s N –th approximation.
From (4.2), (7.8), and (7.24), where w is replaced by u we conclude that
µ
¶
N
1
auiri for ri = 0, Ni and i = 1, 2, 3 ,
U iri = ri +
2
and
¶−1
µ
N
1
viri = ri +
a−1 h−ri −1 U iri .
(4.51)
2
Therefore we can rewrite the system (4.48) in the form
N
N
N
A(∂)B V = F
in ω,
(4.52)
where B is the diagonal matrix of order N1 + N2 + N3 + 3
h³ 2r + 1
´N1
´N2
³ 2r + 1
1
2
r1 +1
r2 +1
B := diag
ah
ah
,
,
2
2
r1 =0
r2 =0
´N3 i
³ 2r + 1
3
a hr3 +1
,
2
r3 =0
N
V
:= (v10 , · · · , v1N1 , v20 , · · · , v2N2 , v30 , · · · , v3N3 )T
with viri given by (4.51).
The results obtained in Section 3 now lead to the following main consequence:
THEOREM 4.1 The BVP
N
N
N
(+) (−)
N
1
A(∂)B V = F , V ∈ HN ( h , h , ω, γ)
(4.53)
has a unique solution, where the system of differential equations is understood
in the weak sense.
We can reformulate the above (BVP) (4.53) as follows:
PROBLEM 4.2 Find a solution (in the weak sense)
N
(+) (−)
1
V ∈ HN ( h , h , ω)
N
of the system (4.52) satisfying the Dirichlet condition V |γ = 0 on γ in the trace
sense.
58
References
[1] Agmon, S., Douglis, A., Nirenberg, L.: Estimates near the boundary for solutions of elliptic partial differential equations satisfying general
boundary conditions. II-Comm. Pure Appl. Math. 17 (1964), 35-92.
[2] Arsenin, V.: Methods of Mathematical Physics and Special Functions.
Nauka, Moscow, 1974. (Russian)
[3] Avalishvili, M., Gordeziani, D.: Investigation of a hierarchical model
of prismatic shells, Bull. Georgian Acad. Sci.165, 3(2001), 485–488.
[4] Avalishvili M.: Investigation of a mathematical model of elastic bar with
variable cross-section, Bull. Georgian Acad. Sci. 166, 1(2002), 16-19.
[5] Babuška, I., Li, L.: Hierarchic modelling of plates. Computers and
Structures, 40(1991), 419-430.
[6] Chinchaladze, N.: Cylindrical bending of the prismatic shell with two
sharp edges in case of a strip. Reports of Enlarged Session of the Seminar
of I.Vekua Institute of Applied Mathematics, 10, 1(1995), 21-23.
[7] Chinchaladze, N.: On the vibration of an elastic cusped plate. Reports
of Enlarged Session of the Seminar of I.Vekua Institute of Applied Mathematics, 14, 1(1999), 12-20.
[8] Costabel, M.: Boundary Integral Operators on Lipschitz Domains: Elementary Results, SIAM J. Math. Anal., 19(1988), 613-626.
[9] Devdariani, G.G.: On the solution with finite energy for bending equation of the prismatic sharpened shell. Proceedings of I.Vekua Institute of
Applied Mathematics of Tbilisi University, 47(1992), 17-25. (Russian)
[10] Dufner, J.: Randwertprobleme fuer Systeme linearer partieller Differentialgleichungen zweiter Ordnung vom elliptisch-parabolischen Typ. Atti
Acc. Naz. Lincei, Memorie, Sc. fis., mat. e nat. S. 8, 11(1972), 17-60.
[11] Dufner, J.: On the solvability of boundary value problems for ellipticparabolic systems of second order. Atti Acc. Naz.Lincei, Rend.Sc.fis.mat.e
nat., 57(1974), 147-155.
[12] Fichera, G.: Sulle equazioni differenziali lineari elliticoparaboliche del
secondo ordine. Atti Accad. Naz. Lincei, Mem. Cl. Sci. Fis., Mat. S. 8,
5(1956), 1-30.
61
[13] Fichera, G.: On a unified theory of boundary value problems for ellipticparabolic equations of second order. Boundary Problems of Differential
Equations, P.E.Langer ed., Madison: The Univ. of Wisconsin Press, 1960,
97-120.
[14] Fichera, G.: Existence Theorems in Elasticity, Boundary Constraints,
Handbuch der Physik, Band 6a/2, Springer-Verlag, Berlin, 1972.
[15] Gilbarg, D., Trudinger, N.S.: Elliptic Partial Differential Equations
of Second Order. Berlin-Heidelberg-New York, Springer-Verlag, 1977.
[16] Gordeziani, D.G.: To the exactness of one variant of the theory of thin
shells. Soviet. Math. Dokl., 215, 4(1974), 751-754.
[17] Guliaev, V., Baganov, V., Lizunov, P.: Nonclassic Theory of Shells.
Vischa Shkola, Lviv 1978. (Russian)
[18] Hobson, E.W.: The Theory of Spherical and Ellipsoidal Harmonics,
Cambridge, 1931
[19] Jaiani, G.V.: Elastic bodies with non-smooth boundaries–cusped plates
and shells. ZAMM, 76(1996), Suppl. 2, 117-120.
[20] Jaiani, G.V.: On the deflections of thin wedge-shapped shells. Bulletin
of the Academy of Science of the Georgian Republic, 65, 3(1972), 543-546.
(Russian)
[21] Jaiani, G.V.: On one problem of an elastic wedge-shapped body. Bulletin of Academy of Sciences of the Georgian Republic, 70, 3(1973), 557560. (Russian)
[22] Jaiani, G.V.: On a wedge-shaped body arbitrary loaded along the
cusped edge. Bulletin of the Academy of Sciences of the Georgian Republic, 75, 2(1974), 309-312. (Russian)
[23] Jaiani, G.V.: On a wedge-shaped shell. Proc.of X All-union Conf. in
Shell and Plate theory, Tbilisi ”Metsniereba”, (1975), 94-101. (Russian)
[24] Jaiani, G.V.: On the bending of a plate with power law changing
stiffness. Annuaire Des Ecoles Superieures Mechanique Technique, 12,
2(1977), 15-19. (Russian)
[25] Jaiani, G.V.: On some boundary value problems for prismatic cusped
shells. Theory of Shells. Proceedings of the Third IUTAM Symposium
on Shell Theory, Dedicated to the Memory of Academician I.N.Vekua,
Koiter W.T. and Mikhailov G.K., Eds., North-Holland Pub.Comp., 1980,
339-343.
62
[26] Jaiani, G.V.: On a physical interpretation of Fichera’s function, Acad.
Naz. dei Lincei, Rend. della Sc. Fis. Mat. e Nat., S. 8, 68, fasc.5(1980),
426-435.
[27] Jaiani, G.V.: Solution of Some Problems for a Degenerate Elliptic Equation of Higher Order and Their Applications to Prismatic Shells. Tbilisi
University Press, 1982. (Russian)
[28] Jaiani, G.V.: Boundary value problems of mathematical theory of prismatic shells with cusps. Proceedings of All-union Seminar in Theory and
Numerical Methods in Shell and Plate Theory, Tbilisi University Press,
1984, 126-142. (Russian)
[29] Jaiani, G.V.: Bending of prismatic cusped shells with power law changing stiffness. Procedings of XIV All-union Conference in Shell and Plate
theory, Tbilisi University Press 1987, 474-479. (Russian)
[30] Jaiani, G.V.: Linear elliptic equations with order degeneration and prismatic shells with cusps. Proceedings of All-union Conference in Modern
Problems of Mathematical Physics, Tbilisi University Press, 1(1987), 207213. (Russian)
[31] Jaiani, G.V.: The first boundary value problem of cusped prismatic shell
theory in zero approximation of Vekua’s theory. Proceedings of I.Vekua
Institute of Applied Mathematics of Tbilisi University, 29(1988), 5-38.
(Russian)
[32] Jaiani, G.V.: On some applications of variational methods in the bending theory of prismatic sharpened shells. Proceedings of I.Vekua Institute
of Applied Mathematics of Tbilisi University, 47(1992), 36-43.
[33] Jaiani, G.V.: Cylindrical bending of a rectangular plate with pover
law changing stiffness. Proceedings of Conference of Young Scientists in
Mathematics. Tbilisi University Press, 1976, 49-52. (Russian)
[34] Jaiani, G.V.: The Weighted Sobolev Spaces Connected with the Computation of Cusped Plates. Abstracts of Reports, International Conference ”Functional Spaces, Approximation Theory, Non-linear Analysis”,
Moscow, 1995, 328-329.
[35] Jaiani, G.V.: Bending of an orthotropic cusped plate, Applied Mathematics and Informatics, 4, 1(1999) , 29-65.
[36] Jaiani, G.V.: On one problem for the fourth-order degenerate equation.
Bulletin of the Academy of Science of the Georgian Republic, 75, 1(1974),
17-20. (Russian)
63
[37] Jaiani, G.V.: Riquier problems with weight for a fourth order degenerate
equation. Soviet Math. Dokl. 17, 6(1976), 1715-1719.
[38] Jaiani, G.V.: Euler-Poisson-Darboux Equation. Tbilisi University Press,
1984. (Russian)
[39] Jaiani, G.V.: On a way of construction of solutions of boundary value
problems for higher order equations. Rendiconti di Matematica, S. 7,
¯
10(1990), 717-731.
[40] Jaiani, G.: On a mathematical model of a bar with a variable rectangular cros-section. Preprint 98/21, Institute für Mathematik, Universität
Potsdam, Potsdam 1998.
[41] Jaiani, G.: On a mathematical model of bars with variable rectangular cross-sections, ZAMM-Zeitschrift fuer Angewandte Mathematik und
Mechanik, Vol.81, 3, pp.147-173, 2001.
[42] Kharadze, A.: Elements of Orthogonal Polynomials (General Theory
and Classical Polynomials), Tbilisi University Press, Tbilisi, 1996. (Georgian)
[43] Khoma, I.: The Generalized Theory of Anisotropic Shells. Naukova
Dumka, Kiev 1986. (Russian)
[44] Khvoles, A.R.: The general representation for solutions of equilibrium
equations of prismatic shell with variable thickness. Seminar of the Institute of Applied Mathematics of Tbilisi State University, Annot. of Reports, 5(1971), 19-21. (Russian)
[45] Kondratiev, V.A.: On the solvability of the first boundary value problem for the strong elliptic equations. Trudy Moskovskogo Matematicheskogo Obshestva, 16(1967), 293-318. (Russian)
[46] Lions, J.L., Magenes, E.: Non-Homogeneous Boundary Value Problems and Applications, Springer, 1972.
[47] Makhover, E.V.: Bending of a plate of variable thikness with a cusped
edge. Scientific Notes of Leningrad State Ped. Institute, 17, 2(1957), 2839. (Russian)
[48] Makhover, E.V.: On the spectrum of the fundamental frequency. Scientific Notes of Leningrad A.I. Hertzen State Ped. Institute, 197(1958),
113-118. (Russian)
[49] McLean, W.: Strongly Elliptic Systems and Boundary Integral Equations, Cambridge University Press, 2000.
64
[50] Meunargia, T.V.: On nonlinear and nonshallow shells. Bulletin of
TICMI, (1998), 46-49.
[51] Mikhlin, S.G.: Variational Methods in Mathematical Physics. Nauka,
Moscow, 1970. (Russian)
[52] Naguleswaran, S.: The vibration of Euler-Bernoulli beam of constant
depth and width convex parabolic variation in Breadth. Nat. Conf. Publ.
Inst. Eng., Austr. 9(1990), 204-209.
[53] Naguleswaran, S.: Vibration of an Euler-Bernoulli beam of constant
depth and with linearly varying breadth. J. Sound Vib., 153, 3(1992),
509-522.
[54] Naguleswaran, S.: A direct solution for the transvese vibration of EulerBernoulli wedge and cone beams. J. Sound Vib. 172, 3(1994), 289-304.
[55] Naguleswaran, S.: Vibration in the two principal planes of a nonuniform beam of rectangular cross-section, one side of which varies as the
square root of the axial coordinate. J. Sound Vib., 172, 3(1994), 305-319.
[56] Naguleswaran, S.: The vibration of a ”complete” Euler-Bernulli beam
of constant depth and breadth proportional to axial coordinate raised to
a positive exponent. J. Sound Vib., 187, 2(1995), 311-327.
[57] Natanson, I.P.: Theory of Functions of a Real Variable, Nauka, Moscow,
1974. (Russian)
[58] Neĉas, J.: Les Méthodes Directes en Théorie des Équations Elliptiques,
Masson, Paris, 1967.
[59] Olenik, O.A., Shamaev, A.S., and Yosifian, G.A.: Mathematical
Problems in Elastisity and Homogenization, Studies in Mathematics and
its Applications, 26, North-Holland Publ., Amsterdam, New York, 1992.
[60] Schwab, C.: A-posteriori modelling error estimation for hierarchik Plate
Models. Numerische Mathematik, 74(1996), 221-259.
[61] Schwab, C.: Hierarchic models of elastic boundary value problems of
thin domains – a-posteriori error estimation and Fourier analysis, Seminar
für Angewandte Mathematik, ETH Zurich.
[62] Triebel, H.: Theory of Function Spaces, Birkhäuser Verlag, Boston,
1983.
65
[63] Tsiskarishvili, G.V.: Axially symmetric strained state of a cusped cylindrical shell. Reports of Enlarged Sessions of the Seminar of I.Vekua Institute of Applied Mathematics of Tbilisi University, 6, 2(1991), 165-168.
(Georgian)
[64] Tsiskarishvili, G.V.: Elastic equilibrium of cusped plates and shells.
Tbilisi University Press, 1993. (Georgian)
[65] Tsiskarishvili, G.V., Khomasuridze, N.G.: Axially symmetric strained state of a cusped conical and cylindrical shells. Proceedings of I.Vekua
Institute of Applied Mathematics of Tbilisi University, 42(1991), 59-71.
(Georgian)
[66] Tsiskarishvili, G. V., Khomasuridze, N.G.: Cylindrical bending of
a cusped cylindrical shell. Proceedings of I.Vekua Institute of Applied
Mathematics of Tbilisi University, 42(1991), 72-79. (Georgian)
[67] Uzunov, S.G.: Variational-difference approximation of a degenerate ordinary differential equation of fourth order. In collection: Correct Boundary Value Problems for Non-classical Equations of Mathematical Physics,
Novosibirsk, 1980, 159-164. (Russian)
[68] Vashakmadze, T.S.: The Theory of Anisotropic Plates. Kluwer Academic Publishers, Dordrecht-London-Boston, 1999.
[69] Vekua, I.N.: On a way of calculating of prismatic shells. Proceedings of
A. Razmadze Institute of Mathematics of Georgian Academy of Sciences,
21(1955), 191-259. (Russian)
[70] Vekua, I.N.: The theory of thin shallow shells of variable thickness. Proceedings of A. Razmadze Institute of Mathematics of Georgian Academy
of Sciences, 30(1965), 5-103. (Russian)
[71] Vekua, I.N.: Shell Theory: General Methods of Construction. Pitman
Advanced Publishing Program, Boston-London-Melbourne, 1985.
[72] Zhgenti, V.S.: To investigation of stress state of isotropic thick-walled
shells of nonhomogeneous structure. Applied Mechanics, 27, 5(1991), 3744. (Russian).
66
PART 2
HIERARCHICAL MODELS FOR CUSPED BEAMS
Variational hierarchical one–dimensional models are constructed
for cusped elastic beams. With the help of the variational methods the existence and uniqueness theorems for the corresponding
one–dimensional boundary value problems are proved in appropriate weighted function spaces. By means of the solutions of these
one–dimensional boundary value problems the sequence of approximate solutions in the corresponding three-dimensional region is
constructed. It is established that this sequence converges (in the
sense of the Sobolev space H 1 ) to the solution of the original threedimensional boundary value problem.
67
List of Notation
N := {1, 2, · · ·},
N0 := {0, 1, 2, · · ·}
Rm
m−dimensional Euclidean space (m ∈ N)
½
¾
(−)
(+)
3
1
Ω := (x1 , x2 , x3 ) ∈ R : x1 ∈]0, L[⊂ R , h j (x1 ) < xj < h j (x1 ), j = 2, 3
Ω = Ω ∪ ∂Ω
beam of variable cross–section
[0, L] ⊂ R1 axis of a beam Ω
½
(+)
(−)
> 0, x1 ∈]0, L[
2hj (x1 ) := h j (x1 ) − h j (x1 )
thickness ( for j = 3)
≥ 0, x1 ∈ {0, L}
and width (for j = 2) of a beam at the point x1 ∈ [0, L]
½µ
¶
(±)
(±)
±
Sj :=
x1 , δj3 x2 + δj2 h 2 (x1 ), δj2 x3 + δj3 h 3 (x1 ) ∈ R3 :
¾
(−)
(+)
x1 ∈]0, L[, h 5−j (x1 ) < x5−j < h 5−j (x1 ), j = 2, 3 ,
½
1 for i = j
δij :=
Kronecker’s delta
0 for i 6= j
(+)
∼
(−)
2hj (x1 ) := h j (x1 ) + h j (x1 ),
aj (x1 ) :=
1
,
hj (x1 )
j = 2, 3
j = 2, 3
∼
hj (x1 )
bj (x1 ) :=
, j = 2, 3
hj (x1 )
∂2
∂2
+ ... + 2
∆m :=
∂x21
∂xm
Pn
Legendre polynomial of order n
C ∞ (Ω, Γ) := {ϕ ∈ C ∞ (Ω) : ϕ|Γ = 0, Γ ⊂ ∂Ω}
H s (Rn ) = H2s (Rn ) = W2s (Rn ) = W s (Rn ) Bessel potential
and Sobolev-Slobodetski space on Rn (s ∈ R)
H s (Ω) = W s (Ω) space of restrictions to Ω ⊂ Rn of distributions
from H s (Rn ) (s ∈ R)
∼s
H (Ω) := {ϕ ∈ H s (Rn ) : supp ϕ ⊂ Ω̄} (s ∈ R)
68
H s (∂Ω)
Sobolev-Slobodetski space on ∂Ω (s ∈ R)
H s (Sj± ), j = 2, 3, space of restrictions to Sj± of distributions
from H s (∂Ω) (s ∈ R)
H s (Ω, Γ) := {ϕ ∈ H s (Ω) : ϕ = 0 on Γ} (s ∈ R)
u := (u1 , u2 , u3 )>
displacement vector
1
eij (u) := (uj,i + ui,j ),
2
i, j = 1, 2, 3, strain tensor
σij (u) := λδij ekk (u) + 2µeij (u), i, j = 1, 2, 3, stress tensor
λ, µ
Lamé constants
T (∂, n)u
stress vector
[T (∂, n)u]j := σji (u)ni the j−th component of the stress
vector T (∂, n)u (j = 1, 2, 3)
(·)>
transposition operation
X1 × X2 × · · · × Xm
direct product of spaces Xj , j = 1, ..., m
X m := X
· · × X}
| × ·{z
m times
∂ := (∂1 , ∂2 , · · · , ∂n )
∂
, j = 1, · · · , n
∂xj
∂ui
∂ 2 ui
ui,j (u) :=
,
ui,jk (u) :=
, i, j, k = 1, 2, 3,
∂xj
∂xj ∂xk
∂j :=
C m (Ω), (C m (Ω̄))
m times continuously differentiable functions in Ω (Ω)
C(Ω) := C 0 (Ω), C(Ω̄) := C 0 (Ω̄)
C m,κ (Ω) (C m,κ (Ω̄)) m times continuously differentiable functions
whose m-th order derivatives are Hölder continuous in Ω (Ω̄) with
the exponent κ ∈ (0, 1]
C 0,1 (Ω) (C 0,1 (Ω̄))
space of Lipschitz continuous functions in Ω (Ω̄)
69
5
Introduction
In the fifties of the last century, I.Vekua [33] suggested a new mathematical
model for elastic prismatic shells (i.e., of plates of variable thickness) which
was based on the expansion of the three-dimensional displacement vector fields
and the strain and stress tensors of the linear elasticity into orthogonal FourierLegendre series with respect to the variable plate thickness. By taking only
the first N + 1 terms of the expansions, he obtained the so-called N -th approximation. Each of the approximations for N = 0, 1, ... can be considered as an
independent mathematical model of plates. In particular, the approximation
for N = 1 actually coincides with the classical Kirchhoff–Love plate model.
In the sixties, I.Vekua [34] offered the analogous mathematical model for thin
shallow shells. All his results concerning plates and shells are collected in
his monograph [34]. Works of I.Babuška, D.Gordeziani, V.Guliaev, I.Khoma,
A.Khvoles, T.Meunargia, C.Schwab, T.Vashakmadze, V.Zhgenti, and others
(see [4], [10], [11], [17], [18], [21], [29], [32], [35] and the references therein)
are devoted to further analysis of I.Vekua’s models (rigorous estimation of
the modeling error, numerical solutions, etc.) and their generalizations (to
non-shallow shells, to the anisotropic case, etc.). At the same time I.Vekua
recommended to investigate also cusped plates, i.e., plates whose thickness
vanishes on some part or on the whole boundary of the plate projection (for
investigations in this direction see the survey [12], [JKNW], Part 1 of this
Lecture Notes, and also I.Vekua’s comments in [34], p.86).
If we consider the cylindrical bending of plate, in particular, a cusped one,
with the rectangular projection a ≤ x1 ≤ b, 0 ≤ x2 ≤ `, then we actually get
the corresponding results also for cusped beams with constant widths (see [13],
[14] and also [30], [31], [22], [23], [24], [25], [26], [5], [6]).
In [Jai4], by expanding fields of displacements, strains, and stresses of the
three-dimensional theory of linear elasticity into double Fourier-Legendre series
with respect to the variables of bar thickness and width, hierarchical models of
beams with variable rectangular cross-sections are constructed. It is allowed
that the thickness and width become zero at some points of the beam axis.
This part deals with the existence, uniqueness, and regularity properties of
solutions to the boundary value problems of the hierarchical models of cusped
beams.
In practice such plates and beams are encountered in calculation of spatial
structures with partly fixed edges (e.g., stadium ceiling, aircraft wings etc), in
machine-tool constructions (e.g., cutting-machine, planning-machine etc), in
the astronautics, and other spheres of practical engineering.
This part is organized as follows.
In Section 2 we collect well-known auxilary material from the three-dimensional
elasticity theory and the theory of double Fourier-Legendre series.
70
Section 3 deals with the construction of hierarchical models which reduce
the original three-dimensional boundary value problem for cusped beam type
elastic bodies (with rectangular cross-section) to one-dimensional problems.
We recall that in the regular case (i.e., when the area of the beam crosssection does not vanish anywhere), the double Fourier-Legendre coefficients of
the displacement vector u, which solves the original three-dimensional problem
in the space H 1 (Ω), automatically belong to the space H 1 (]0, L[) (see [Av]).
N(2) ,N(3)
N(2) ,N(3)
w i00 , · · · ,
w iN (2) N (3) for i = 1, 2, 3,
Moreover, all the double moments
i
i
³
´
(j)
(j)
(j)
(j)
and N := N1 , N2 , N3 , j = 2, 3, determined by the corresponding
one-dimensional hierarchical models belong to the space H 1 (]0, L[), while the
N(2) ,N(3)
w
approximation of the displacement vector
represented by means of
these moments belong to the space H 1 (Ω). In the case of cusped beams, the
double Fourier-Legendre coefficients of the displacement vector u ∈ H 1 (Ω) do
not belong to the space H 1 (]0, L[) any more, in general. Moreover, in general,
the space of approximate vectors
N(2) ,N(3)
w
represented by the double moments
N(2) ,N(3)
N(2) ,N(3)
w i00 , · · · , w iN (2) N (3) ,
i
i
1
i = 1, 2, 3, of the class H 1 (]0, L[), do not belong
to the space H (Ω) either. Therefore it is necessary to choose a function
N(2) ,N(3)
N(2) ,N(3)
w i00 , · · · , w iNi (2) Ni (3) defined on ]0, L[
space for double moment functions
such that the corresponding linear combinations of these moments with the
Legendre polynomials as coefficients, belong to the space H 1 (Ω). This is done
in Subsection 3.2.
In Subsection 3.3 we establish the uniqueness and existence results in the
corresponding function spaces for the obtained one-dimensional variational
hierarchical models. We remark here that the well-known approach of previous
authors [2],[3] needs some modifications which are connected with the above
mentioned peculiarities of the appropriate function spaces where we look for
the unknown moments.
Subsection 3.4 describes the convergence in the space H 1 (Ω) of the apN(2) ,N(3)
w
proximate solution
to the exact solution u of the three-dimensional
original problem. There are given the abstract error estimates with respect to
the number pair of approximation order N(2) , N(3) and the maximum of the
thickness and width 2hj (j = 2, 3) of a beam.
6
Preliminary material
2.1. Cusped beams with rectangular cross–sections
Let an elastic beam type three-dimensional body (later on called ”beam”)
71
occupy a bounded region Ω̄ with the boundary ∂Ω
(−)
(+)
Ω := {(x1 , x2 , x3 ) ∈ R3 : 0 < x1 < L, h j (x1 ) < xj < h j (x1 ), j = 2, 3}, (6.1)
where ]0, L[ is the so-called axis of the beam Ω̄, Ω̄ = Ω ∪ ∂Ω, and [0, L] =
]0, L[∪{0} ∪ {L}.
In what follows we assume that
(±)
h j (x1 ) ∈ C 2 (]0, L[) ∩ C([0, L]),
½
(+)
(−)
> 0 for x1 ∈]0, L[,
2hj (x1 ) := h j (x1 ) − h j (x1 )
≥ 0 for x1 ∈ {0, L},
j = 2, 3,
2h3 (x1 ) is the thickness and 2h2 (x1 ) is the width of the beam Ω̄ at the point
x1 ∈ [0, L].
Further, let
n
o
Γ0 (ΓL ) := (x1 , x2 , x3 ) ∈ R : x1 = 0(L), h j (x1 ) ≤ xj ≤ h j (x1 ), j = 2, 3 ,
½µ
Sj±
(−)
3
:=
(+)
¶
x1 , δj3 x2 + δj2 h 2 (x1 ), δj2 x3 + δj3 h 3 (x1 ) ∈ R3 :
(±)
(±)
(−)
(+)
x1 ∈]0, L[, h 5−j (x1 ) < x5−j < h 5−j (x1 ),
¾
j = 2, 3 ,
and the plane measures
h(+)
ih(+)
i
(−)
(−)
m(Γ0 ) := h 2 (0) − h 2 (0) h 3 (0) − h 3 (0) ≥ 0,
m(ΓL ) :=
h(+)
ih(+)
i
(−)
(−)
(L)
−
(L)
(L)
−
(L)
≥ 0.
h2
h2
h3
h3
(+)
(−)
If only one of the differences h j (x1 ) − h j (x1 ) (j = 2, 3) vanishes at x1 = 0
and (or) at x1 = L, then the corresponding ends Γ̄0 and Γ̄L of the beam turn
into a segment; if the both ones become zero, then the ends turn into a point.
Let
Γ0 when m(Γ0 ) > 0, m(ΓL ) = 0,
ΓL when m(Γ0 ) = 0, m(ΓL ) > 0,
Γ :=
Γ0 ∪ ΓL when m(Γ0 ) > 0, m(ΓL ) > 0.
Obviously,
∂Ω = Γ̄0 ∪ Γ̄L ∪ S̄2+ ∪ S̄2− ∪ S̄3+ ∪ S̄3− ,
where S3+ and S3− are the upper and lower face surfaces and, S2+ and S2− are
the lateral surfaces of the beam. Note that, in general, ∂Ω is not a Lipschitz
surface.
72
If at least one of S̄j+ ∩ S̄j− 6= ∅ (j = 2, 3) is valid then a beam is called a
cupsed beam and appropriately Γ0 and ΓL will be referred to as a cusped end
of a cusped beam.
In Figures 1-5 are given some examples of cusped beams (see Appendix C).
In Figures 6-11 are presented all possible profiles and projections of cusped
beams (see Appendix D).
2.2. Variational formulation of the basic three-dimensional problem for beam type bodies
The system of statics of the three-dimensional linear theory of isotropic
elasticity in terms of the displacement vector reads as follows
A(∂)u := µ∆3 u + (λ + µ) grad div u = f,
(6.2)
where A(∂) is a strongly elliptic differential operator
A(∂) = [Akj (∂)]3×3
h
:= µδkj ∆3 + (λ + µ)
∂2 i
,
∂xk ∂xj 3×3
u := (u1 , u2 , u3 )T is the displacement vector, λ and µ are Lamé constants, δkj
is Kronecker’s symbol; the vector −f corresponds to a volume force.
By
1
1
eij (u) = (∂i uj + ∂j ui ) = (uj,i + ui,j )
2
2
and σij (u) we denote the strain and stress tensors, respectively. They are
related by Hooke’s law
σij (u) = λδij ekk (u) + 2µeij (u) = λδij uk,k + µ(ui,j + uj,i ), i, j = 1, 2, 3.
Here and in what follows, for brevity, we often employ the abridged notation:
i) repeated indices imply summation if they are not underlined (Greek letters run from 1 to 2, and Latin letters run from 1 to 3, unless stated otherwise);
ii) subscripts preceded by a comma will mean partial derivatives with respect to the corresponding coordinates (see the list of notation).
By T (∂, n)u we denote the stress vector calculated on the surface element
with the unit normal vector n = (n1 , n2 , n3 ):
[T (∂, n)u]k := σkj (u)nj , k = 1, 2, 3.
Recall that (6.2) can be written in the form
[A(∂)u]k = σkj,j (u) = fk , k = 1, 2, 3.
73
Let us consider the boundary value problem (BVP):
A(∂)u = f in Ω,
(+)
(j)
Tu = g
(−)
(j)
Tu = g
(6.3)
on Sj+ , j = 2, 3,
(6.4)
on Sj− , j = 2, 3,
(6.5)
u = 0 on Γ.
(6.6)
We look for a solution of the BVP (2.3)-(2.6) in the Sobolev space [W 1 (Ω)]3
= [H 1 (Ω)]3 . Assuming Ω to be a Lipschitz domain, we have the natural constraints on the data (cf., e.g., [McL], Ch.4)
h
f ∈ H̃
−1
i3
(Ω) ,
(±)
g (j)
h
i3
±
− 21
∈ H (Sj ) , j = 2, 3,
(6.7)
which, in the case when S̄j+ ∩ S̄j− 6= ∅ means that there exists a functional g (j)
on
S := ∂Ω\(Γ̄0 ∪ Γ̄L )
h
i
3
(±)
1
such that g (j) ∈ H − 2 (S) and g (j) |Sj± = g (j) on Sj± , j = 2, 3 (for the tilda
spaces see the list of notation).
Equation (6.3) is understood in the distributional sense. The Dirichlet type
condition (6.6) is understood in the trace sense ([19], [20]). The conditions (6.4)
1
and (6.5) are understood in the sense of the functional space [H − 2 (S ± )]3 . Note
1
that for u ∈ [H 1 (Ω)]3 with Au ∈ [H̃ −1 (Ω)]3 , the functional T u ∈ [H − 2 (Γ)]3 is
correctly defined by the equality (Green’s identity)
Z
∗
hT u, u i∂Ω := σij (u)eij (u∗ )dx + hf, u∗ iΩ ∀u∗ ∈ [H 1 (Ω)]3 ,
Ω
1
1
where h·, ·i∂Ω denotes a duality between [H − 2 (∂Ω)]3 and [H 2 (∂Ω)]3 , while
h·, ·iΩ denotes a duality between [H̃ −1 (Ω)]3 and [H 1 (Ω)]3 (cf. [20], Ch.4; [7]).
Denote
H 1 (Ω, Γ) := {ϕ ∈ H 1 (Ω) : ϕ = 0 on Γ}.
The BVP (6.3)-(6.6) is equivalent to the following variational formulation.
Problem (I): Find u ∈ [H 1 (Ω; Γ)]3 such that
B(u, u∗ ) = F(u∗ ) ∀u∗ ∈ [H 1 (Ω, Γ)]3 ,
where
(6.8)
Z
∗
σij (u)eij (u∗ )dx,
B(u, u ) :=
Ω
74
(6.9)
∗
∗
F(u ) := −hf, u iΩ +
3 ·
X
h
(+)
g (j)
j=2
∗
, u iSj+ + h
(−)
g (j)
¸
∗
, u iSj− ;
(6.10)
here h·, ·iM is a duality pairing between the spaces H r (M ) and H̃ −r (M ), where
r = 1 for M = Ω and r = 1/2 for M = Sj+ , Sj− , S.
The both above formulations are equivalent to the minimization problem:
Find u ∈ [H 1 (Ω, Γ)]3 such that
E(u∗ ) ≥ E(u) ∀u∗ ∈ [H 1 (Ω, Γ)]3 ,
(6.11)
where
1
(6.12)
E(u∗ ) := B(u∗ , u∗ ) − F(u∗ ).
2
The following existence and uniqueness results are well-known (see, e.g.,
[8], [27], [20]).
THEOREM 6.1 Let Ω be a Lipschitz domain, Γ 6= ∅, and the conditions
(6.7) are fulfilled. Then the BVP (6.3) − (6.6) (i.e., the equation (6.8) and
the minimization problem (6.11), (6.12)) has a unique solution u ∈ [H 1 (Ω, Γ)]3
and
n
3
(+)
P
[|| g (j) || − 1 + 3
||u||[H 1 (Ω)]3 ≤ C ||f ||[H̃ −1 (Ω)]3 +
[H
j=2
+||
(−)
g (j)
o
||[H − 12 (S − )]3 ] ,
2 (S
j
)]
j
(±)
(j)
where C is a positive constant independent of u, f, g
.
The proof of the theorem is based on the Lax-Milgram lemma since :
i) F is a bounded linear functional;
ii) the bilinear form B(·, ·) is bounded
B(u, u∗ ) ≤ δ1 ||u||[H 1 (Ω)]3 ||u∗ ||[H 1 (Ω)]3 , δ1 = const > 0;
(6.13)
iii) B(·, ·) is coercive (due to the Korn’s inequality)
B(u, u) ≥ δ2 ||u||2[H 1 (Ω)]3 ∀u ∈ [H 1 (Ω, Γ)]3 , δ2 = const > 0,
(6.14)
(see e.g., [20], Theorems, 10.1 and 10.2, [28], Theorem 2.5).
Due to the regularity properties of solutions to the BVP (6.3)-(6.6), on
some subsets of Ω̄ we get a higher smoothness for the solution by improving the
smoothness of the right-hand side vector (volume force) f and the prescribed
(±)
(j)
stress vectors g
.
(±)
1
More precisely, let g (j) ∈ [H r+ 2 (Sj± )]3 , f ∈ [H r (Ω)]3 , Sj± ∈ C r+1,1 (j =
2, 3), where r ≥ 0 is an integer. Then
u ∈ [H r+2 (Ω∗ )]3 ,
75
where Ω∗ is an arbitrary subdomain of Ω̄ such that Ω̄∗ ∩(Γ̄0 ∪ Γ̄L ∪∂S2+ ∪∂S2− ) =
∅. Moreover, there exists a constant C = C(Ω∗ ) > 0 such that
n
||u||[H r+2 (Ω∗ )]3 ≤ C ||f ||[H r (Ω)]3
+
3
X
(+)
(j)
[|| g
(−)
(j)
||[H r+ 12 (S + )]3 + || g
j
j=2
(±)
In addition, if f ∈ C 0,κ (Ω), g (j) ∈ C 1,κ (S ± ),
C 2,κ (Ω̄∗ ) with 0 < κ < 1 (cf., e.g., [20], [1], [9]).
o
||[H r+ 21 (S − )]3 ] .
j
Sj± ∈ C 2,κ , then u ∈
2.3. Double Fourier-Legendre series
Let
µ·
ϕ(x1 , ·, ·) ∈ L2
¸¶
¸ ·
(−)
(+)
h 2 (x1 ), h 2 (x1 ) × h 3 (x1 ), h 3 (x1 ) ,
(−)
(+)
(+)
(−)
2hj (x1 ) := h j (x1 ) − h j (x1 ) > 0, x1 ∈]0, L[, j = 2, 3.
The function ϕ(x1 , ·, ·) can be then represented in the form of double FourierLegendre series
ϕ(x1 , x2 , x3 ) =
∞
¡
P
k2 +
k2 ,k3 =0
1
2
¢¡
k3 +
1
2
¢
a2 (x1 )a3 (x1 ) ϕk2 k3 (x1 )
× Pk2 (a2 x2 − b2 )Pk3 (a3 x3 − b3 ),
which converges in the L2 -sense and where
aj := aj (x1 ) =
h̃j (x1 )
1
, bj := bj (x1 ) =
,
hj (x1 )
hj (x1 )
(+)
(−)
2h̃j (x1 ) := h j (x1 ) + h j (x1 ), j = 2, 3,
(+)
(+)
h 2 (x1 ) h 3 (x1 )
Z
Z
ϕk2 k3 (x1 ) =
ϕ(x1 , x2 , x3 )Pk2 (a2 x2 − b2 )Pk3 (a3 x3 − b3 )dx2 dx3 ,
(−)
(−)
h 2 (x1 ) h 3 (x1 )
k2 , k3 = 0, ∞.
Note that
(+)
(
Zh j
Pk (aj xj − bj )Pl (axj − bj )aj (x1 )dxj =
(−)
hj
76
0
for k 6= l,
2
for k = l,
2k + 1
(6.15)
tj := aj xj − bj =
7
(+)
1 for xj = h j ,
(−)
j = 2, 3.
(6.16)
−1 for xj = h j ,
Hierarchical method for cusped beams: reduction to one-dimensional models
3.1. Double Legendre moments
Let Ω be a Lipschitz domain as described in Subsection 2.1, f ∈ [C 0,α (Ω̄)]3 ,
and u ∈ [H 1 (Ω)]3 ∩[C 2,α (Ω)]3 ∩[C 2 (Ω∪S2+ ∪S2− ∪S3+ ∪S3− )]3 be a unique solution
to the BVP (6.3)-(6.6). Then ui can be expanded into the Fourier-Legendre
series in Ω
µ
¶µ
¶
∞
X
1
1
ui (x1 , x2 , x3 ) =
k2 +
k3 +
a2 a3 uik2 k3 (x1 )
2
2
k ,k =0
2
3
×Pk2 (a2 x2 − b2 )Pk3 (a3 x3 − b3 ), i = 1, 2, 3,
x1 ∈]0, L[,
where
(−)
(+)
h j (x) < xj < h j (x), j = 2, 3,
(+)
(−)
(+)
(−)
h j (x1 ) − h j (x1 ) > 0 for x1 ∈]0, L[,
j = 2, 3,
h j (x1 ) − h j (x1 ) ≥ 0 for x = 0, L,
(+)
(+)
h 2 (x1 ) h 3 (x1 )
Z
Z
uik2 k3 (x1 ) =
ui (x1 , x2 , x3 )Pk2 (a2 x2 − b2 )
(−)
(−)
h 2 (x1 ) h 3 (x1 )
×Pk3 (a3 x3 − b3 )dx2 dx3 ,
(7.1)
k2 , k3 = 0, ∞, i = 1, 2, 3.
It is evident, that (6.6) implies
uik2 k3 (0) = 0 and uik2 k3 (L) = 0, when m(Γ0 ) > 0 and m(ΓL ) > 0,
respectively, due to the trace theorem.
77
Note that with the help of (6.16) the Fourier coefficient (7.1) can be rewritten as follows
1
uik2 k3 (x1 ) =
a2 a3
¶
Z+1Z+1 µ
t2 + b2 t3 + b3
ui x 1 ,
Pk2 (t2 )Pk3 (t3 )dt2 dt3
,
a2
a3
−1 −1
Z+1Z+1
= h2 (x1 )h3 (x1 )
ui (x1 , h2 (x1 )t2 + h̃(x1 ), h3 (x1 )t3 + h̃(x1 ))
−1 −1
×Pk2 (t2 )Pk3 (t3 )dt2 dt3 ,
which shows that if ui is bounded in the spatial vicinity of x1 = 0 and x1 = L,
where m(Γ0 ) = 0 and m(ΓL ) = 0, respectively, then
uik2 k3 (0) = 0, and uik2 k3 (L) = 0,
k2 , k3 = 0, ∞, i = 1, 2, 3,
since
1
1
= hj (x1 ) =
aj (x1 )
2
·
(7.2)
¸
h j (x1 ) − h j (x1 ) , j = 2, 3,
(+)
(−)
vanish at x1 = 0 and x1 = L.
Clearly, in general, ui ∈ H 1 (Ω) is not bounded and the condition (7.2) does
not hold.
3.2. Approximating function space
Let us fix
(j)
N
³
:=
(j)
(j)
(j)
N1 , N 2 , N 3
´
∈ [N0 ]3 ,
j = 2, 3,
and consider the combinations
(3)
(2)
wi (x1 , x2 , x3 ) ≡
N(2) ,N(3)
w i (x1 , x2 , x3 )
i
X
X N
Ni
:=
(3)
(2)
ri =0 ri =0
×Pr(2) (a2 x2 − b2 )Pr(3) (a3 x3 − b3 )
i
N(2) ,N(3)
µ
¶µ
¶
1
1
(2)
(3)
a2 a3 ri +
ri +
2
2
w ir(2) r(3) (x1 ), i = 1, 2, 3,
i
i
i
(7.3)
N(2) ,N(3)
1
w ir(2) r(3) (x1 ) ≡ wir(2) r(3) ∈ Hloc
where
(]0, l[). The functions wir(2) r(3) are
i
i
i
i
i
i
called double moments of the function wi .
N(2) ,N(3)
Let w ≡ w
:= (w1 , w2 , w3 ).
We recall that an underlined index means that the corresponding repeated
indices do not imply summation.
78
Denote by
∼
V N(2) ,N(3) (Ω) := VeN (2) ,N (3) × VeN (2) ,N (3) × VeN (2) ,N (3)
1
1
2
2
3
3
the set of vector-functions with components of type (7.3) which belong to
H 1 (Ω).
¯
Let h2 (0) · h3 (0) = 0, h2 (x1 ) · h3 (x1 ) ¯x1 ∈]0,L] > 0 ,
and
∼
wi ∈ VeN (2) ,N (3) (Ω, ΓL ) ⊂ H 1 (Ω), i.e., w ∈ V N(2) ,N(3) (Ω, ΓL ) ⊂ [H 1 (Ω)]3 , (7.4)
i
i
where
n
o
VeN (2) ,N (3) (Ω, ΓL ) := wi ∈ VeN (2) ,N (3) (Ω) : wi = 0 on ΓL ,
i
i
i
i
n
o
∼
∼
V N(2) ,N(3) (Ω, ΓL ) := w ∈ V N(2) ,N(3) (Ω) : w = 0 on ΓL .
If h2 (x1 ) · h3 (x1 )|x1 ∈[0,L] > 0, then we consider VeN (2) ,N (3) (Ω, Γ0 ∪ ΓL ).
i
i
Our aim is to choose the corresponding function spaces for the double
moments wir(2) r(3) .
i
i
Taking into account (7.4), (7.3), and using the standard limiting procedure,
we easily get
Z
2
|wi (x1 , x2 , x3 )| dΩ =
(2)
(3)
Ni
ZL N
i
X
X µ
(2)
(3)
ri =0 ri =0
0
Ω
(2)
ri
1
+
2
¶µ
(3)
ri
1
+
2
¶
×a2 a3 |wir(2) r(3) |2 dx1 < +∞,
i
i
(7.5)
whence
1
1
(j)
(j)
a22 a32 wir(2) r(3) ∈ L2 (]0, L[), ri = 0, Ni , i = 1, 2, 3; j = 2, 3.
i
i
Denote
vir(2) r(3) :=
i
i
wir(2) r(3)
i
(2)
i
(3)
r +1 ri +1
h2i
h3
.
(7.6)
Clearly,
r
(2)
h2i
wi .
+ 12
r
(3)
h3i
+ 12
vir(2) r(3) ∈ L2 (]0, L[).
i
i
The functions vir(2) r(3) are called weighted double moments of the function
i
i
79
Analogously, applying the formula 3
(j) −1 µ
¶
rX
i
1 h
(j)
0
r(j) +s(j)
Pr(j) (aj xj − bj ) =
2s +
1 − (−1)
Ps(j) (aj xj − bj )
2
(j)
=0
s
for j = 2, 3, we obtain
Z
|wi,3 (x1 , x2 , x3 )|2 dΩ
Ω
=
(+) (+)
(2)
(3)
Ni
ZL Zh 2 Zh 3
i
N
X
X
0
r(2) =0 r(3) =0
(−) (−)
h2 h3
a2 a23
µ
¶µ
¶
1
1
(2)
(3)
ri +
ri +
2
2
i
i
ri −1 µ
(3)
×Pr(2) (a2 x2 − b2 )
i
X
1
+
2
(3)
si
(3)
si =0
¶h
i
(3)
(3)
1 − (−1)ri +si
o2
× Ps(3) (a3 x3 − b3 )wir(2) r(3) (x1 ) dx3 dx2 dx1
i
i
i
(+) (+)
(2)
(3)
(3)
µ
¶
Ni
ZL Zh 2 Zh 3
i
i
N
X
X N
X
1
(3)
=
ri +
2
r(2) =0 s(3) =0 r(3) =s(3)
0
(−) (−)
h2 h3
i
i
i
i
i
(3)
h
´
(3)
× 1 − (−1)ri +si wir(2) r(3) (x1 )
i
i
µ
¶µ
¶
1
1
(2)
(3)
2
×a2 a3 ri +
si +
Pr(2) (a2 x2 − b2 )
i
2
2
o2
× Ps(3) (a3 x3 − b3 ) dx3 dx2 dx1
i
ZL Ni(2)
=
0
×
µ
(3)
i
X N
X
(2)
a2 a33
(3)
ri =0 si =0
(3)
µ
i
N
X
r(3) =s(3)
i
(3)
ri +
1
2
¶h
(2)
ri
1
+
2
¶µ
(3)
si
1
+
2
¶
2
i
(3)
(3)
ri +si
1 − (−1)
wir(2) r(3) (x1 ) dx1 < +∞,(7.7)
i
i
i
whence
1/2 3/2
a2 a3
(3)
i
X µ (3) 1 ¶ h
(3)
(3)
ri +si
ri +
1 − (−1)
wir(2) r(3) ∈ L2 (]0, L[),
i
i
2
(3)
(3)
Ni
ri =si
3
Here and in what follows we assume that
m
P
s=k
80
(·) = 0 for m < k.
(j)
(j)
ri = 0, Ni ,
i = 1, 2, 3; j = 2, 3.
(3)
(3)
In turn these inclusions (with si = Ni
(j)
1/2 3/2
(3)
(3)
− 1, si = Ni
− 2, · · ·) yield
(j)
a2 a3 wir(2) r(3) ∈ L2 (]0, L[), ri = 0, Ni , i = 1, 2, 3; j = 2, 3,
i
i
i.e., by virtue of (7.6),
r
(2)
h2i
+ 12
r
(3)
h3i
− 12
(j)
vir(2) r(3) ∈ L2 (]0, L[),
i
(j)
ri = 0, Ni , i = 1, 2, 3, j = 2, 3.
i
Similarly,
Z
|wi,2 (x1 , x2 , x3 )|2 dΩ
Ω
=
(2)
(3)
(2)
µ
N
ZL N
i
i
i
N
X
X
X
0
(3)
(2)
ri =0 si =0
r(2) =s(2)
i
i
(3)
ri
1
+
2
µ
×
a32 a3
2
¶h
i
(2)
(2)
1
(2)
ri +si
wir(2) r(3) (x1 )
ri +
1 − (−1)
i
i
2
¶µ
(2)
si
1
+
2
¶
dx1 < +∞,
(7.8)
and
3/2 1/2
(j)
(j)
a2 a3 wir(2) r(3) ∈ L2 (]0, L[), ri = 0, Ni ; i = 1, 2, 3; j = 1, 2,
i
i
i.e.,
r
(2)
h2i
− 21
r
(3)
h3i
(j)
ri
+ 12
vir(2) r(3) ∈ L2 (]0, L[),
i
=
i
(j)
0, Ni ;
i = 1, 2, 3;
j = 2, 3.
Analogously, applying the formulas
Pr(j) ,1 (aj xj − bj ) = Pr0(j) (aj xj − bj )(aj,1 xj − bj,1 )
(j)
=
r
X
Ajq(j) (2r(j) − 2q (j) + 1) Pr(j) −q(j) (aj xj − bj )
q (j) =1
+Aj0 r(j) Pr(j) (aj xj − bj ), j = 2, 3,
with
(+)
(−)
h j,1 − (−1)q h j,1
= Ajq+2s j = 2, 3; q = 0, 1, · · · ,
Ajq := −
2hj
81
and taking into account that
(j)
(j)
(j)
si := ri − qi ,
i = 1, 2, 3, j = 2, 3,
(7.9)
we arrive at the relation
Z
|wi,1 (x1 , x2 , x3 )|2 dΩ
Ω
(+) (+)
(2)
(3)
Ni
ZL Zh 2 Zh 3 N
i
X
X (2) 1 (3) 1
(
(ri + )(ri + )
=
2
2
(2)
(3)
0
ri =0 ri =0
(−) (−)
h2 h3
×{(a2,1 a3 + a2 a3,1 )Pr(2) (a2 x2 − b2 )Pr(3) (a3 x3 − b3 )wir(2) r(3)
i
i
i
i
(2)
ri
(2)
+a2 a3 [A20 ri Pr(2) (a2 x2 − b2 ) +
i
X
(2)
(2)
A2q(2) (2ri − 2qi + 1)
i
(2)
qi =1
×Pr(2) −q(2) (a2 x2 − b2 )]Pr(3) (a3 x3 − b3 )wir(2) r(3)
i
i
i
i
i
(3)
ri
(3)
+a2 a3 [A30 ri Pr(3) (a3 x3 − b3 ) +
i
X
(3)
(3)
A3q(3) (2ri − 2qi
(3)
i
qi =1
+1)Pr(3) −q(3) (a3 x3 − b3 )]Pr(2) (a2 x2 − b2 )wir(2) r(3)
i
i
i
i
i
+a2 a3 Pr(2) (a2 x2 − b2 )Pr(3) (a3 x3 − b3 )wir(2) r(3) ,1 })2 dx3 dx2 dx1
i
(+) (+)
h2 h3
ZL Z Z
=
(2)
Ni
(
0
(−) (−)
h2 h3
i
i
(3)
i
X N
X
(2)
i
1 (3) 1
(2)
a2 a3 (ri + )(ri + )
2
2
(3)
ri =0 ri =0
(2)
(3)
2
−1
3
×{[(a2,1 a−1
2 + A0 ri + a3,1 a3 + A0 ri )wir(2) r(3) + wir(2) r(3) ,1 ]
i
i
i
i
×Pr(2) (a2 x2 − b2 )Pr(3) (a3 x3 − b3 )
i
(2)
ri −1
X
+2
(2)
si =0
i
1
(2)
A2r(2) −s(2) (si + )Ps(2) (a2 x2 − b2 )Pr(3) (a3 x3 − b3 )wir(2) r(3)
i
i
i
2 i
i
i
(3)
ri −1
X
+2
(3)
si =0
1
(3)
A3r(3) −s(3) (si + )Ps(3) (a3 x3 − b3 )
2 i
i
i
×Pr(2) (a2 x2 − b2 )wir(2) r(3) })2 dx3 dx2 dx1 < +∞.
i
In view of
i
i
−1
Aj0 = −hj,1 h−1
j = aj,1 aj ,
82
j = 2, 3;
(7.10)
and (3.6), we have
³
´
2 (2)
−1
3 (3)
a2,1 a−1
+
A
r
+
a
a
+
A
r
wir(2) r(3) + wir(2) r(3) ,1
3,1
2
0 i
3
0 i
i
h³
=
(2)
1 + ri
³
µ
(3)
(2)
r
(2)
= h2i
(3)
a2,1 a−1
2 + 1 + ri
´
i
i
wir(2) r(3) + wir(2) r(3) ,1
a3,1 a−1
3
i
i
i
i
¶
(3)
(2)
i
i
r +1 ri +1
wi r(2) r(3)
a3
a2i
i
i
−r −1 −ri −1
a3
a2 i
=
Z
´
,1
(3)
+1 ri +1
vi r(2) r(3) ,1 .
h3
i
i
Hence, from (3.10) we obtain
|wi,1 (x1 , x2 , x3 )|2 dΩ
Ω
=
(+) (+)
(2)
(3)
Ni
ZL Zh 2 Zh 3
i
N
X
X
0
r(2) =0 r(3) =0
(−) (−)
h2 h3
·
r
(2)
× h2i
i
¶µ
¶
µ
1
1
(3)
(2)
a2 a3 ri +
ri +
2
2
i
(3)
+1 ri +1
h3
vi r(2) r(3) ,1
i
i
× Pr(2) (a2 x2 − b2 )Pr(3) (a3 x3 − b3 )
i
i
A2r(2) −s(2)
i
i
µ
¶
1
(2)
s +
Ps(2) (a2 x2 − b2 )Pr(3) (a3 x3 − b3 )wir(2) r(3)
i
i
i
i
2
A3r(3) −s(3)
i
i
µ
¶
1
(3)
s +
Pr(2) (a2 x2 − b2 )
i
2
(2)
ri −1
X
+2
(2)
si =0
(3)
ri −1
X
+2
(3)
si =0
× Ps(3) (a3 x3 − b3 )wir(2) r(3)
i
i
io2
dx3 dx2 dx1 < +∞.
i
(7.11)
Introduce the notation
µ
¶µ
¶ ³
´
(2)
(3)
(2) (3)
1
1
r +1 ri +1
0,0,ri ,ri
(2)
(3)
:= h2i
ri +
ri +
Ψ
h3
vir(2) r(3) ,1 (7.12)
i
i
2
2
(2)
µ
(3)
si
1
+
2
¶
³
Ψ
for ri
(2)
(2)
(2)
(2)
(3)
(2)
si
1
+
2
´
ri −si ,0,ri ,ri
(3)
= si ,
:= 2A2r(2) −s(2) wir(2) r(3)
i
¶
³
Ψ
i
(3)
(2)
(2)
µ
(3)
= si , ri
for ri − si > 0, ri
(3)
(3)
(2)
(3)
´
0,ri −si ,ri ,ri
i
(7.13)
(3)
= si ,
:= 2A3r(3) −s(2) wir(2) r(3)
i
83
i
i
i
i
(7.14)
(3)
µ
¶µ
1
2
(2)
si +
(3)
(2)
(2)
for ri − si > 0, ri = si ,
¶ ³
´
(2)
(2) (3)
(3) (2) (3)
1
ri −si ,ri −si ,ri ,ri
(3)
si +
Ψ
:= 0
2
(2)
(2)
(3)
(7.15)
(3)
for ri − si > 0, ri − si > 0.
Then we get from (3.11)
Z
|wi,1 (x1 , x2 , x3 )|2 dΩ
Ω
(+) (+)
(2)
(3)
µ
¶µ
¶
Ni
ZL Zh 2 Zh 3 N
i
X
X
1
1
(2)
(3)
=
a2 a3 ri +
ri +
{
2
2
(2)
(3)
0
ri =0 ri =0
(−) (−)
h2 h3
(2)
×
(3)
ri
ri
X
X
(2)
(2)
Ψ(ri
(2)
(3)
(2)
si
×
(2)
1
+
2
¶µ
(3)
si
1
+
2
¶
Ps(2) (a2 x2 − b2 )Ps(3) (a3 x3 − b3 )}2 dx3 dx2 dx1
i
i
(+) (+)
(3)
X µ
(3)
(2)
(2)
Ni
Ni
ZL Zh 2 Zh 3 N
i
X
X
X
[
=
{
0
(3)
(3)
si =0 si =0
µ
(3)
−si ,ri −si ,ri ,ri )
(3)
(2)
(2)
Ni
(2)
si =0 si =0 ri =si
(−) (−)
h2 h3
(3)
(2)
ri
(3)
ri =si
1
+
2
¶
µ
¶ ³
´
(2)
(2) (3)
(3) (2) (3)
1
r −si ,ri −si ,ri ,ri
×
+
Ψ i
]
2
¶µ
¶
µ
1
1
(2)
(3)
si +
Ps(2) (a2 x2 − b2 )
×a2 a3 si +
i
2
2
(3)
ri
×Ps(3) (a3 x3 − b3 )}2 dx3 dx2 dx1
i
(+) (+)
h2 h3
ZL Z Z
=
(2)
Ni
{
0
(−) (−)
h2 h3
µ
×
(2)
si
(3)
i
X N
X
Φ
´
³
(2) (3)
(2)
(3)
si ,si ,Ni ,Ni
a2 a3
(2)
(3)
si =0 si =0
1
+
2
¶µ
(3)
si
1
+
2
¶
Ps(2) (a2 x2 − b2 )
i
2
×Ps(3) (a3 x3 − b3 )} dx3 dx2 dx1 < +∞,
i
where
³
Φ
(2)
(3)
(2)
si ,si ,Ni
(3)
,Ni
(2)
Ni
´
X
:=
(2)
(2)
ri =si
84
(3)
X µ (2) 1 ¶
ri +
2
(3)
(3)
Ni
ri =si
µ
¶ ³
´
(2)
(2) (3)
(3) (2) (3)
1
ri −si ,ri −si ,ri ,ri
(3)
× ri +
Ψ
.
2
(7.16)
Further, by virtue of (2.15),
Z
2
|wi,1 (x1 , x2 , x3 )| dΩ =
(3)
(2)
Ni
ZL N
i
X ·
X
Φ
(2)
(3)
si =0 si =0
0
Ω
´ ¸2
³
(3)
(2)
(2) (3)
si ,si ,Ni ,Ni
µ
(2)
si
×a2 a3
1
+
2
¶µ
(3)
si
1
+
2
¶
dx1 .
(7.17)
Consequently,
´
³
(2)
(3)
(2) (3)
si ,si ,Ni ,Ni
1/2 1/2
a2 a3 Φ
(j)
∈ L2 (]0, L[),
(j)
si = 0, Ni , i = 1, 2, 3; j = 2, 3.
Taking into account (3.6), from (7.5), (7.7), (7.8), and (7.12)-(7.17) it follows that
3
X
N(2) ,N(3)
k w k2[H 1 (Ω)]3 :=
||wi ||2H 1 (Ω)
i=1
=
3
X
(3)
X X µ
(2)
{
i=1
Ni
Ni
(2)
(3)
(2)
ri
ri =0 ri =0
1
+
2
¶µ
(3)
ri
1
+
2
¶
¯¯ (2)
¯¯2
¯¯ ri + 1 ri(3) + 1
¯¯
2
2
¯
¯
× ¯¯h2
h3
vir(2) r(3) ¯¯¯¯
i
+
X X µ
(2)
Ni
(3)
Ni
(2)
(3)
(2)
ri
ri =0 si =0
(3)
X µ
Ni
×k
(3)
(3)
ri
(3)
ri =si
r
(2)
×h2i
+ 12
(3)
− 12
Ni
(3)
(2)
(2)
X µ
Ni
(2)
ri =si
L2 (]0,L[)
¶µ
(3)
si
1
+
2
¶
¶h
i
(3)
(3)
1 − (−1)ri +si
vir(2) r(3) k2L2 (]0,L[)
(3)
ri
ri =0 si =0
(2)
1
+
2
i
(2)
Ni
×k
1
+
2
i
X X µ
(3)
+
r
h3i
i
(2)
ri
1
+
2
1
+
2
¶µ
(2)
si
1
+
2
¶
¶h
i
(2)
(2)
ri +si
1 − (−1)
85
r
(2)
×h2i
+
− 12
r
(3)
h3i
+ 12
i
X X µ
(2)
Ni
(3)
Ni
(2)
(3)
vir(2) r(3) k2L2 (]0,L[)
(2)
si
si =0 si =0
i
1
+
2
¶µ
(3)
si
1
+
2
¶
µ
(2)
(2)
Ni
X
(3)
s +1 s +1
×kh2i 2 h3i 2 vis(2) s(3),1
i
i
+2
(2)
(2)
ri
(2)
ri =si +1
(3)
(2)
ri + 12
×h2
(3)
si + 12
h3
Ni
X
vir(2) s(3) + 2
i
i
(3)
(3)
ri =si +1
s
(2)
×h2i
=: ||v||
+ 12
r
(3)
h3i
+ 12
N
,N(3)
A2r(2) −s(2)
i
i
µ
¶
1
(3)
A3r(3) −s(3)
ri +
2
i
i
i
Ã
H 1 (2)
¶
vis(2) r(3) k2L2 (]0,L[) }
i
2
1
+
2
!
(+) (+) (−) (−)
h 2 , h 3 , h 2 , h 3 ,]0,L[
µ
1
DEFINITION 7.1 By HN
(2) ,N(3)
.
(7.18)
¶
h 2 , h 3 , h 2 , h 3 , ]0, L[ we denote the fol-
(+) (+) (−) (−)
lowing set of vector-functions
´T
³
v := v100 , · · · , v1N (2) N (3) , v200 , · · · , v2N (2) N (3) , v300 , · · · , v3N (2) N (3)
1
1
2
(3)
(2)
2
3
(2)
(3)
3
(2)
(3)
1
from H1loc (]0, L[) := [Hloc
(]0, L[)](N1 +1)(N1 +1)+(N2 +1)(N2 +1)+(N3 +1)(N3 +1) ,
where the components vir(2) r(3) are given by (7.6) and for which the norm in
i
i
the right-hand side of (7.18) is finite.
¶
µ
(+) (+) (−) (−)
1
LEMMA 7.2 The space HN(2) ,N(3) h 2 , h 3 , h 2 , h 3 , ]0, L[ is complete.
Proof. The norm in the space
µ
¶
(+) (+) (−) (−)
1
HN(2) ,N(3) h 2 , h 3 , h 2 , h 3 , ]ε, L[ , ε > 0,
(7.19)
is equivalent to the norm
|| · ||H1 (]ε,L[) ,
since hj (x1 ) > 0, j = 2, 3, µfor x1 ∈]ε, L[.
Let {vn } ⊂
1
HN
(2) ,N(3)
(7.20)
¶
h 2 , h 3 , h 2 , h 3 , ]0, L[ be a fundamental sequence
(+) (+) (−) (−)
and show that it converges to some vector-function
µ
¶
(+) (+) (−) (−)
1
v ∈ HN(2) ,N(3) h 2 , h 3 , h 2 , h 3 , ]0, L[ .
86
Due to the above equivalence, the sequence {vn } is also fundamental in the
space H1 (]ε, L[) for arbitrary ε > 0. Since H1 (]ε, L[) is complete, there exists
a vector-function v (ε) ∈ H1 (]ε, L[) such that
||vn − v (ε) ||H1 (]ε,L[) → 0 as n → +∞.
Note that for ε1 < ε2 (i.e., ]ε1 , L[⊃]ε2 , L[) there holds
v (ε1 ) |]ε2 ,L[ = v (ε2 ) ,
where the symbol |]ε2 ,L[ denotes the restriction onto ]ε2 , L[. Therefore, there
exists a vector-function
v0 ∈ H1loc (]0, L[)
such that for ∀ε > 0
v0 |]ε ,L[ = v (ε) .
It is evident that
||vn ||
Ã
H 1 (2)
N
!
(+) (+) (−) (−)
,N(3)
≤ M for ∀n ∈ N,
h2 , h3 , h2 , h3 ,]0,L[
where M is a positive constant.
Obviously,
||vn ||
Ã
H 1 (2)
N
≤ ||vn ||
!
(+) (+) (−) (−)
,N(3)
h2 , h3 , h2 , h3 ,]ε,L[
Ã
H 1 (2)
N
!
(+) (+) (−) (−)
≤ M for ∀ε > 0,
h2 , h3 , h2 , h3 ,]0,L[
,N(3)
and, in view of the equivalence of norms (7.19) and (7.20),
||v0 ||
!
Ã
H 1 (2)
N
(+) (+) (−) (−)
,N(3)
= lim ||vn ||
n→+∞
= ||v (ε) ||
h2 , h3 , h2 , h3 ,]ε,L[
N
Ã
H 1 (2) (3)
N
,N
Ã
H 1 (2)
(+) (+) (−) (−)
!
(+) (+) (−) (−)
,N(3)
≤ M.
h2 , h3 , h2 , h3 ,]ε,L[
Hence,
||v0 ||
Ã
H 1 (2)
N
(+) (+) (−) (−)
,N(3)
= lim ||v0 ||
ε→0
!
h2 , h3 , h2 , h3 ,]0,L[
Ã
H 1 (2) (3)
N
,N
87
(+) (+) (−) (−)
!
h2 , h3 , h2 , h3 ,]ε,L[
!
h2 , h3 , h2 , h3 ,]ε,L[
≤ M,
which implies that
v0 ∈
1
HN
(2) ,N(3)
µ(+) (+) (−) (−)
¶
h2 , h3 , h2 , h3 , ]0, L[ .
It is easy to show that vn → v0 in the space (7.18). Indeed , for arbitrary
δ > 0 there exists a number N0 (δ), such that
||vn − vm ||
Ã
≤ ||vn − vm ||
h2 , h3 , h2 , h3 ,]ε,L[
Ã
H 1 (2)
N
!
(+) (+) (−) (−)
H 1 (2) (3)
N
,N
,N(3)
!
(+) (+) (−) (−)
<δ
h2 , h3 , h2 , h3 ,]0,L[
for ∀n, m > N0 (δ). Passing to the limit as m → +∞ for a fixed n we get
||vn − vm ||
Ã
H 1 (2)
N
!
(+) (+) (−) (−)
h2 , h3 , h2 , h3 ,]ε,L[
,N(3)
≤ ||vn − v (ε) ||
Ã
(+) (+) (−) (−)
1
HN(2),N(3)
+||vm − v (ε) ||
→ ||vn − v (ε) ||
!
h2 , h3 , h2 , h3 ,]ε,L[
Ã
H 1 (2) (3)
N
,N
h2 , h3 , h2 , h3 ,]ε,L[
Ã
H 1 (2) (3)
N
,N
!
(+) (+) (−) (−)
(+) (+) (−) (−)
!
h2 , h3 , h2 , h3 ,]ε,L[
and
||vn − v (ε) ||
Ã
H 1 (2) (3)
N
,N
!
(+) (+) (−) (−)
h2 , h3 , h2 , h3 ,]ε,L[
= ||vn − v0 ||
Ã
H 1 (2) (3)
N
,N
(+) (+) (−) (−)
!
≤ δ.
h2 , h3 , h2 , h3 ,]ε,L[
Note that the left–hand side expression is bounded, increasing function of ε.
Therefore sending ε to zero we conclude that
||vn − v0 ||
Ã
H 1 (2)
N
(+) (+) (−) (−)
,N(3)
!
≤ δ,
h2 , h3 , h2 , h3 ,]0,L[
which completes the proof. 2
µ(+) (+) (−) (−)
¶
1
COROLLARY 7.3 HN
h2 , h3 , h2 , h3 , ]0, L[ is a Hilbert space. It is
(2) ,N(3)
embeded in H1loc (]0, L[), i.e., for arbitrary ε > 0 and
µ(+) (+) (−) (−)
¶
1
v ∈ HN(2) ,N(3) h2 , h3 , h2 , h3 , ]0, L[
there holds v ∈ H1 (]ε, L[).
88
COROLLARY 7.4 VeN(2) ,N(3) (Ω) is a closed subspace of [H 1 (Ω)]3 .
We introduce the space
µ(+) (+) (−) (−)
¶
1
HN(2) ,N(3) h2 , h3 , h2 , h3 , ]0, L[, L
½
µ(+) (+) (−) (−)
¶
¾
1
:= v ∈ HN(2) ,N(3) h2 , h3 , h2 , h3 , ]0, L[ : v(L) = 0 .
LEMMA 7.5 If w ∈ VeN(2) ,N(3) (Ω, ΓL ) then the corresponding vector of weiµ(+) (+) (−) (−)
¶
1
ghted moments v ∈ HN(2) ,N(3) h2 , h3 , h2 , h3 , ]0, L[, L .
Proof. Due to the trace theorem we have (see also (7.3), (7.6))
(3)
(2)
µ
i
X
X N
Ni
0 = τΓL (wi ) =
(2)
(2)
ri
(3)
ri =0 ri =0
1
+
2
¶µ
(3)
ri
1
+
2
¶
¸
· (2) (3)
ri
ri
×[Pr(2) (a2 x2 − b2 ) Pr(3) (a3 x3 − b3 )]ΓL h2 h3 vir(2) r(3)
i
i
i
i
, (7.21)
x1 =L
where τΓL is the trace operator on ΓL .
Whence the equalities
vir(2) r(3) (L) = 0
i
i
follow, since
h2 (L)h3 (L) > 0.
This proves the lemma. 2
REMARK 7.6 It is easy to see that
(+) (+) (−) (−)
1
VeN(2) ,N(3) (Ω, ΓL ) and HN
(2) ,N(3) ( h2 , h3 , h2 , h3 , ]0, L[, L)
are closed subspaces of
(+) (+) (−) (−)
1
[H 1 (Ω, ΓL )]3 and HN
(2) ,N(3) ( h2 , h3 , h2 , h3 , ]0, L[),
respectively, and they represent Hilbert spaces with respect to the natural scalar
products induced from
(+) (+) (−) (−)
1
[H 1 (Ω)]3 and HN
(2) ,N(3) ( h2 , h3 , h2 , h3 , ]0, L[).
89
3.3. Existence results
For any pair of elements
µ
∗
v, v ∈
1
HN
(2) ,N(3)
¶
(+) (+) (−) (−)
h 2 , h 3 , h 2 , h 3 , ]0, L], L
∼
we construct w, w∗ ∈ V N(2) ,N(3) (Ω, ΓL ) according to the formulas (7.3) and
(7.6):
(3)
(2)
µ
i
X N
X
Ni
wi (x1 , x2 , x3 ) =
(2)
(2)
ri
(3)
ri =0 ri =0
1
+
2
¶µ
(3)
ri
1
+
2
¶
r
(2)
r
(3)
h2i (x1 ) h3i (x1 )
×vir(2) r(3) (x1 )Pr(2) (a2 (x1 )x2 − b2 (x1 )) Pr(3) (a3 (x1 )x3 − b3 (x1 )) ,
i
i
i
i
(7.22)
(2)
(3)
¶µ
¶ (2)
µ
i
X N
X
(3)
1
1
r
r
(3)
(2)
∗
wi (x1 , x2 , x3 ) =
ri +
h2i (x1 ) h3i (x1 )
ri +
2
2
(2)
(3)
Ni
ri =0 ri =0
∗
×vir
(2) (3) (x1 )P (2) (a2 (x1 )x2
r2
i ri
− b2 (x1 ))Pr(3) (a3 (x1 )x3 − b3 (x1 )).
i
(7.23)
Consider the following variational
∼
Ω
Problem (IN
(2) ,N(3) ). Find w ∈ V N(2) ,N(3) (Ω, ΓL ) such that
∼
B(w, w∗ ) = F(w∗ )
∀w∗ ∈ V N(2) ,N(3) (Ω, ΓL ),
(7.24)
where the bilinear form B(· , ·) and the linear functional F(·) are given by
(6.9) and (6.10), respectively, with f and g satisfying the following conditions
∼
1
fk ∈ H −1 (Ω), gk ∈ H − 2 (S), k = 1, 2, 3.
Due to the coercivity property (6.14) and the Lax-Milgram lemma along
with Corollary 3.4 it follows
Ω
LEMMA 7.7 The Variational Problem (IN
(2) ,N(3) ) has a unique solution.
Let, for simplicity
vir(2) r(3) = 0
i
i
(j)
(j)
if at least one of the following
conditions oN (j) ≥ ri > nNi , i = 1, 2, 3;
o
n
(3)
(3)
(3)
(2)
(2)
(2)
, N (3) := max N1 , N2 , N3
j = 2, 3, with N (2) := max N1 , N2 , N3
be fulfilled.
Ω
Further, we reduce the three-dimensional variational Problem (IN
(2) ,N(3) )
(see (7.24)) to the one-dimensional variational problem for the vector-function
90
of weighted moments. To this end we have to substitute (7.22) and (7.23) into
(7.24), apply (6.9), (2.10), and formulas (see [15])
(2)
N
X
(3)
N
X
r(2) =0
r(3) =0
eij (w)(x1 , x2 , x3 ) =
µ
r
(2)
1
+
2
¶µ
r
(3)
1
+
2
¶
a2 (x1 )a3 (x1 )
× eijr(2) r(3) (v)(x1 )Pr(2) (a2 (x1 )x2 − b2 (x1 ))
× Pr(3) (a3 (x1 )x3 − b3 (x1 )),
(3)
N
X
(2)
N
X
σij (w)(x1 , x2 , x3 ) =
µ
r
(2)
r(2) =0 r(3) =0
1
+
2
¶µ
r
(3)
1
+
2
(7.25)
¶
a2 (x1 )a3 (x1 )
× σijr(2) r(3) (v)(x1 )Pr(2) (a2 (x1 )x2 − b2 (x1 ))
× Pr(3) (a3 (x1 )x3 − b3 (x1 )),
(7.26)
σijr(2) r(3) = λδij ekkr(2) r(3) + 2µeijr(2) r(3) , i, j = 1, 2, 3,
(7.27)
r(k) = 0, N (k) , k = 2, 3,
along with the orthogonality property of the Legendre polynomials (6.15). By
equalities (2.9), (2.10), (7.25)-(7.27) we get
ZL
B(w, w∗ ) =
(+)
0
ZL
=
0
(+)
Zh 2
Zh 3
dx1 dx2 σij (w)eij (w∗ ) dx3
(−)
h2
(−)
h3
(+)
(+)
(2)
(3)
(2)
(3)
¶
Zh 2
Zh 3 N
X N
X N
X N
X µ
1
(2)
dx1 dx2
r +
2
(2)
(3)
(2)
(3)
(−)
h2
µ
× r
(3)
(−)
h3
1
+
2
r
=0 r
¶µ
(2)
s
=0 s
1
+
2
=0 s
¶µ
(3)
s
=0
1
+
2
×a22 a23 σijr(2) r(3) (v)eijs(2) s(3) (v ∗ )
×Pr(2) (a2 x2 − b2 )Pr(3) (a3 x3 − b3 )
×Ps(2) (a2 x2 − b2 )Ps(3) (a3 x3 − b3 )
(2)
(3)
¶µ
¶
ZL N
X N
X µ
1
1
(2)
(3)
=
r +
r +
2
2
(2)
(3)
0
r
=0 r
=0
×a2 a3 σijr(2) r(3) (v)eijr(2) r(3) (v ∗ )dx1
(2)
(3)
¶µ
¶
ZL N
X N
X µ
1
1
(2)
(3)
=
r +
r +
2
2
(2)
(3)
0
r
=0 r
=0
91
¶
£
×a2 a3 λδij ekkr(2) r(3) (v)eijr(2) r(3) (v ∗ )
¤
+2 µeijr(2) r(3) (v)eijr(2) r(3) (v ∗ ) dx3
(2)
(3)
¶µ
¶
N
X N
X µ
1
1
(2)
(3)
r +
r +
2
2
(2)
(3)
=
r
=0 r
=0
ZL
×
£
a2 a3 λekkr(2) r(3) (v)eiir(2) r(3) (v ∗ )
0
¤
+2 µeijr(2) r(3) (v)eijr(2) r(3) (v ∗ ) dx3
]0,L[
=: BN(2) ,N(3) (v, v ∗ ),
F(w∗ ) =
(3)
(2)
3
N
X µ
X
X N
i=1 r(2) =0 r(3) =0
i
i
1
(2)
ri +
2
(7.28)
¶µ
1
(3)
ri +
2
¶ ZL
n
a2 a3 −fir(2) r(3)
i
i
0
(+)
s
s
µ
¶2
µ
¶2
Zh 3
(+)
(−)
(+)(2)
(2) (−)
(2)
+ gi
1 + h 2,1 + (−1)ri g i
1 + h 2,1
(−)
h3
×Pr(3) (a3 x3 − b3 )dx3
i
s
(+)
h2
Z
(+)
g (3)
i
+
µ
1+
+
h 3,1
(−)
h2
o
r
(2)
×Pr(2) (a2 x2 − b2 )dx2 h2i
i
=
(2)
(3)
3
N
X
X N
X µ
i=1 r(2) =0 r(3) =0
i
i
s
(+)(2)
+g
(3)
iri
(+)(3)
+ g
r
(2)
iri
(2)
×h2i
s
¶2
(+)
1
(2)
ri +
2
(2) (−)
(3)
(−1)ri g i
1+
s
(+)
¶µ
µ
1+
¶2
h 2,1
(+)
h 3,1
1+
¶2
(−)
h 3,1
dx2
(3)
+1 ri +1 ∗
h3
vir(2) r(3) dx1
i
i
1
(3)
ri +
2
¶ ZL
n
a2 a3 −fir(2) r(3)
i
0
µ
µ
s
(2) (−)
(2)
ri
(3)
iri
+ (−1)
¶2
g
(3) (−)
+ (−1)ri g
(3)
+1 ri +1 ∗
h3
vir(2) r(3) dx1
i
i
]0,L[
=: FN(2) ,N(3) (v ∗ ),
92
(3)
iri(2)
µ
1+
s
(−)
¶2
h 2,1
µ
1+
i
(−)
h 3,1
¶2
(7.29)
where
(+) (+)
Zh 2 Zh 3
fi (x1 , x2 , x3 )Pr(2) (a2 x2 − b2 ) Pr(3) (a3 x3 − b3 )dx2 dx3 ,
fir(2) r(3) (x1 ) =
i
i
i
i
(−) (−)
h2 h3
(j)
(j)
ri = 0, Ni , j = 2, 3,
i = 1, 2, 3,
are double moments of fi and
(+)
(±)(2)
g
(3)
iri
µ
¶
Zh 3
(±)
(2)
:=
gi
x1 , h 2 (x1 ), x3 Pr(3) (a3 x3 − b3 )dx3 ,
i
(−)
h3
(+)
(±)(3)
g
(2)
iri
µ
¶
Zh 2
(±)
(3)
:=
gi
x1 , x2 , h 3 (x1 ) Pr(2) (a2 x2 − b2 )dx2 ,
i
(−)
h2
are single moments with respect to Pr(5−j) (a5−j x5−j − b5−j ), j = 2, 3, of the
i
restrictions of
(j)
gi
(±)
on xj = h j (x1 ), j = 2, 3. Here we assume
(±)(2)
g
fir(2) r(3) (x1 ) = 0,
i
i
for N
(j)
≥
(j)
ri
>
(3)
iri
(j)
Ni ,
(x1 ) = 0,
(±)(3)
g
and
(2)
iri
(x1 ) = 0
(7.30)
i = 1, 2, 3; j = 2, 3.
Thus, (7.24) is equivalent to the following µone-dimensional variational
¶
(+) (+) (−) (−)
]0,L[
1
Problem (IN(2) ,N(3) ) . Find v ∈ HN(2) ,N(3) h 2 , h 3 , h 2 , h 3 , ]0, L[, L such
that
]0,L[
]0,L[
BN(2) ,N(3) (v, v ∗ ) = FN(2) ,N(3) (v ∗ )
µ
¶
(+) (+) (−) (−)
∗
1
∀v ∈ HN(2) ,N(3) h 2 , h 3 , h 2 , h 3 , ]0, L[, L .
(7.31)
There holds
THEOREM 7.8 If
−1
−1
ψir(2) r(3) := h2 2 h3 2 { − fir(2) r(3)
i
i
i
i
s
µ
¶
+
(+)(2)
g
(3)
iri
1+
(+)
2
h 2,1
93
s
(2) (−)
(2)
ri
(3)
iri
+ (−1)
g
µ
1+
(−)
h 2,1
¶2
s
(+)(3)
g
+
µ
1+
(+)
¶2
h 3,1
s
µ
¶2
(−)
(3) (−)
ri g (3)
1 + h 3,1 } ∈ L2 (]0, L[),
+ (−1)
(2)
(2)
iri
(7.32)
iri
]0,L[
then Problem (IN(2) ,N(3) ) has a unique solution v and there holds the estimate
]0,L[
||v||
Ã
H 1 (2)
N
!
(+) (+) (−) (−)
h 2 , h 3 , h 2 , h 3 ,]0,L[
,N(3)
≤
||FN(2) ,N(3) ||
δ2
.
]0,L[
,
]0,L[
where ||FN(2) ,N(3) || is the norm of the functional FN(2) ,N(3) , and δ2 is the constant involved in (6.14).
Proof. Due to the equality (7.28), the coercivity and boundedness of B(·, ·)
(see inequalities (6.13) and (6.14)) and isometry (7.18) (see Definition 3.1) it
]0,L[
follows that the bilinear form BN (2) ,N (3) (·, ·) is coercive and bounded:
]0,L[
BN(2) ,N(3) (v, v) = B(w, w) ≥ δ2 ||w||2[H 1 (Ω)]3
= δ2 ||v||2
!,
Ã
H 1 (2)
N
,N(3)
(+) (+) (−) (−)
h 2 , h 3 , h 2 , h 3 ,]0,L[
]0,L[
BN(2) ,N(3) (v, v ∗ ) = B(w, w∗ ) ≤ δ1 ||w||[H 1 (Ω)]3 ||w∗ ||[H 1 (Ω)]3
= δ1 ||v||
! ||v ∗ ||
Ã
H 1 (2) (3)
N
,N
(+) (+) (−) (−)
h 2 , h 3 , h 2 , h 3 ,]0,L[
Ã
H 1 (2) (3)
N
,N
!.
(+) (+) (−) (−)
h 2 , h 3 , h 2 , h 3 ,]0,L[
]0,L[
The equalities (3.29) and (3.32) imply that FN(2) ,N(3) (·) is a bounded linear
¶
µ
(+) (+) (−) (−)
1
functional in the space HN(2) ,N(3) h 2 , h 3 , h 2 , h 3 , ]0, L[ . Indeed,
]0,L[
FN(2) ,N(3) (v ∗ )
L
(3)
(2)
3
N
X µ (2) 1 ¶ µ (3) 1 ¶ Z
X
X N
ri +
ψir(2) r(3)
=
ri +
i
i
2
2
(3)
i=1 (2)
ri =0 ri =0
(2)
ri + 12
× h2
(3)
ri + 12
h3
0
∗
vir
(2) (3) dx1 ,
r
i
i
and therefore
]0,L[
|FN(2) ,N(3) (v ∗ )|
≤
(3)
(2)
3
N
X µ
X
X N
(2)
ri
i=1 r(2) =0 r(3) =0
i
i
×||ψir(2) r(3) ||L2 (]0,L[)
i
i
94
1
+
2
¶1/2 µ
(3)
ri
1
+
2
¶1/2
¯¯µ
¯¯
¶1/2 µ
¶1/2 (2)
¯¯
¯¯
(3) 1
1
1
ri + 2 ri + 2 ∗
¯¯ (2) 1
¯¯
(3)
× ¯¯ ri +
ri +
h2
h3
vir(2) r(3) ¯¯
¯¯
2
2
i
i ¯¯
L2 (]0,L[)
(2)
(3) µ
¶
µ
¶
3
N
N
1/2
1/2
1
1
X X X
(2)
(3)
≤
ri +
ri +
||ψir(2) r(3) ||L2 (]0,L[)
i
i
2
2
(3)
i=1 (2)
ri =0 ri =0
∗
×||v ||
!,
Ã
(+) (+) (−) (−)
h 2 , h 3 , h 2 , h 3 ,]0.L[
H 1 (2) (3)
N
,N
since, in view of (3.18),
¯¯µ
¯¯
¶1/2 µ
¶1/2 (2)
¯¯
¯¯
(3) 1
1
1
1
ri + 2 ri + 2 ∗
¯¯ (2)
¯¯
(3)
ri +
h2
h3
vir(2) r(3) ¯¯
¯¯ ri +
¯¯
2
2
i
i ¯¯
L2 (]0,L[)
∗
≤ ||v ||
Ã
H 1 (2)
N
,N(3)
!,
(+) (+) (−) (−)
h 2 , h 3 , h 2 , h 3 ,]0,L[
(j)
ri = 0, N (j) , i = 1, 2, 3;
j = 2, 3.
Taking into account the inequalities
µ
¶1 µ
¶1
1 2
1 2
(j)
(j)
ri +
≤ N +
, i = 1, 2, 3; j = 2, 3,
2
2
we get
]0,L[
|FN(2) ,N(3) (v ∗ )| ≤ ||v ∗ ||
Ã
H 1 (2)
N
,N(3)
!
(+) (+) (−) (−)
h 2 , h 3 , h 2 , h 3 ,]0,L[
(2)
(3)
¶1/2 µ
¶1/2 X
µ
3
N
N
X X
1
1
N (3) +
||ψir(2) r(3) ||L2 (]0,L[) .
× N (2) +
i
i
2
2
(3)
i=1 (2)
ri =0 ri =0
Now, Remark 3.6 and the Lax-Milgram lemma completes the proof. 2
REMARK 7.9 If fi ∈ L2 (Ω), then for almost all x1 ∈]0, L[:
¶µ
¶
∞
∞ µ
X
X
1
1
(2)
(3)
fi (x1 , x2 , x3 ) =
ri +
ri +
a2 a3 fir(2) r(3) (x1 )
i
i
2
2
(2)
(3)
ri =0 ri =0
× Pr(2) (a2 x2 − b2 )Pr(3) (a3 x3 − b3 )
i
i
and
−1
−1
(j)
h2 2 h3 2 fir(2) r(3) ∈ L2 (]0, L[), ri = 0, ∞; i = 1, 2, 3; j = 2, 3,
i
i
95
due to (3.30) and the inequalities
(2)
N
X
(2)
(3)
N
X
µ
(3)
ri =0 ri =0
1
(2)
ri +
2
¶µ
1
(3)
ri +
2
¶ ZL
Z
2
|fi |2 dΩ, i = 1, 2, 3.
a2 a3 |fir(2) r(3) | dx1 ≤
i
i
0
Ω
In this case (7.32) is equivalent to the conditions
s
s
µ
¶2
µ
¶2
(+)
1
1
(+)
(−)
(−)
(2)
−2 −2
(2)
(2)
r
i
g
g (3) 1 + h 2,1
h2 h3
1 + h 2,1 + (−1)
iri
iri(3)
s
s
µ
¶2
µ
¶2
(+)
(−)
(+)(3)
(3) (−)
(3)
+ g (2) 1 + h 3,1 + (−1)ri g (2) 1 + h 3,1
∈ L2 (]0, L[)
iri
iri
(j)
for ri = 0, N (j) , i = 1, 2, 3, j = 2, 3.
LEMMA 7.10 Let Ω be a Lipschitz domain described in (2.1). Then the
∼
∞
1
union
∪
(3) (Ω, ΓL ) is dense in the space H (Ω, ΓL ).
(2)
V
N ,N
(3)
(2)
1
1
N1 ,N1 =0
The proof of the lemma is given in Appendix A.
3.4. Convergence results
First we prove the following convergence
THEOREM 7.11 Assume that f ∈ [L2 (Ω)]3 and
"
µ
¶2 # 12
−1
−1
h2 2 h3 2 1 +
(2)
(3)
For N , N
(±)
(±)(j)
g
h j,1
3
∈ [N0 ] let
N(2) ,N(3)
v
(5−j)
iri
∈ L2 (]0, L[), i = 1, 2, 3; j = 2, 3.
µ
∈
1
HN
(2) ,N(3)
(+) (+) (−) (−)
h 2 , h 3 , h 2 , h 3 , ]0, L[, L
¶
be a
]0,L[
unique solution to the problem (IN(2) ,N(3) ) (see (7.31)) and
N(2) ,N(3)
w
∼
∈ V N(2) N(3) (]Ω, ΓL [) ⊂ [H 1 (Ω, ΓL )]3
be the corresponding vector constructed by (7.22), which represents a solution
to the variational problem (7.24).
And finally, let u ∈ [H 1 (Ω, ΓL )]3 be a unique solution of the three-dimensional variational problem (6.8).
Then
o
n
N(2) ,N(3)
(j)
(j)
(j)
(j)
→ +∞, j = 2, 3.
k w −uk[H 1 (Ω)]3 → 0 as Nmin := min N1 , N2 , N3
96
Proof. By standard arguments it can be easily shown that
mizes the functional
N(2) ,N(3)
1 ]0,L[
]0,L[
JN(2) ,N(3) (v) := BN(2) ,N(3) (v, v) − FN(2) ,N(3) (v)
2
µ
1
∀v ∈ HN
(2) ,N(3)
v
mini-
(7.33)
¶
(+) (+) (−) (−)
h 2 , h 3 , h 2 , h 3 , ]0, L[, L ,
i.e.,
JN(2) ,N(3) (
N(2) ,N(3)
v
) ≤ JN(2) ,N(3) (v)
µ
¶
(+) (+) (−) (−)
1
∀v ∈ HN(2) ,N(3) h 2 , h 3 , h 2 , h 3 , ]0, L[, L .
Note that (see (7.31), (7.29), and (7.24))
µ (2) (3) ¶
µ (2) (3) ¶
N ,N
N ,N
]0,L[
]0,L[
v , v = FN(2) ,N(3) (v) = F(w) = B
w ,w
BN(2) ,N(3)
µ
∀v ∈
1
HN
(2) ,N(3)
(+) (+) (−) (−)
(7.34)
(7.35)
¶
h 2 , h 3 , h 2 , h 3 , ]0, L[, L ;
here and in what follows w corresponds to v via formula (7.22) and is an
∼
arbitrary element of the space V N(2) ,N(3) (Ω, ΓL ).
Further, with the help of (6.8),(7.28), and (7.33)–(7.35), we easily derive
µ
¶
µ
¶
N(2) ,N(3)
N(2) ,N(3)
N(2) ,N(3)
B u − w ,u − w
= B(u, u) − 2B u, w
µ (2) (3) (2) (3)¶
µ (2) (3)¶
N ,N
N ,N
N ,N
w , w
w
+B
= B(u, u) − 2F
µ (2) (3) (2) (3)¶
µ (2) (3)¶
N ,N
N ,N
N ,N
]0,L[
]0,L[
v , v
v
− 2FN(2) ,N(3)
+BN(2) ,N(3)
µ (2) (3)¶
µ (2) (3)¶
N ,N
N ,N
]0,L[
v
w
+2FN(2) ,N(3)
≤ B(u, u) − 2F
µ (2) (3)¶
N ,N
]0,L[
]0,L[
]0,L[
v
+BN(2) ,N(3) (v, v) − 2FN(2) ,N(3) (v) + 2FN(2) ,N(3)
µ (2) (3)¶
N ,N
w
= B(u, u) + B(w, w) − 2F
− 2F(w)
µ (2) (3)¶
N ,N
w
+2F
= B(u, u) + B(w, w) − 2F(w)
= B(u, u) + B(w, w) − 2B(u, w)
= B(u − w, u − w)
∼
∀w ∈ V N(2) ,N(3) (Ω, ΓL ),
97
that is,
µ
¶
N(2) ,N(3)
N(2) ,N(3)
B u − w ,u − w
≤ B(u − w, u − w)
∼
∀w ∈ V N(2) ,N(3) (Ω, ΓL ).
(7.36)
We proceed as follows. From (7.36) and the coercivity property of the
bilinear form B (see (6.14)) it follows that
°2
°
°
N(2) ,N(3)
N(2) ,N(3)
N(2) ,N(3) °
°
w
w
w ) ≤ εN(2) ,N(3) (7.37)
u
−
≤
B(u
−
,
u
−
δ2 °
°
°
[H 1 (Ω,ΓL )]3
with
εN(2) ,N(3) :=
inf
∼
B(u − w, u − w) ≥ 0.
w∈V N(2) ,N(3) (Ω,ΓL )
Since
∼
∼
V N(2) ,N(3) (Ω, ΓL ) ⊂ V N∗ (2) ,N∗ (3) (Ω, ΓL )
for
(j)
Ni
∗ (j)
≤ N i , i = 1, 2, 3; j = 2, 3,
we conclude that εN(2) ,N(3) ≥ ε ∗ (2) , ∗ (3) and therefore there exists the limit
N
(2)
N
lim
(3)
Nmin ,Nmin →+∞
εN(2) ,N(3) = ε ≥ 0.
Due to (7.37) it remains to show that ε = 0. We prove it by contrudiction.
Assume that ε > 0.
Note that, under our assumption,
εN(2) ,N(3) ≥ ε > 0
∀N (j) ∈ [N0 ]3 ,
j = 2, 3.
(7.38)
By Lemma 3.10 the union
[
∼
1
3
V N(2) ,N(3) is dense in [H (Ω, ΓL )] .
(7.39)
(N(2) ,N(3) )
∗
∗
Because of (7.39), there exists a vector–function w and vectors N(j) ,
j = 2, 3, such that
°2
°∗
∼
ε
∗
°
°
w ∈ V ∗ (2) ∗ (3) (Ω, ΓL ) and °w − u°
<
N ,N
2δ1
[H 1 (Ω)]3
with the same δ1 as in (6.13).
Therefore,
ε ∗ (2)
N
∗
(3)
,N
°
°
∗ °2
∗
∗
°
≤ B(u − w, u − w) ≤ δ1 °u − w°
[H 1 (Ω)]3
ε
≤ ,
2
which contradicts to (7.38). Thus, ε = 0 and the result follows. 2
98
N(2) ,N(3)
w
THEOREM 7.12 Let u and
let the conditions
be as in Theorem 3.11 and, in addition,
(±)
−1
3
3
h−1
j u ∈ [L2 (Ω)] , hj h j,1 u ∈ [L2 (Ω)] ,
(h2 h3 ),1
u ∈ [L2 (Ω)]3 ,
h2 h3
u,1 ∈ [L2 (Ω)]3 ,
(±)
∗
3
h j,1 u,j ∈ [L2 (Ω)] ,
be fulfilled with
hj
1/2
u ∈ [L2 (Ω)]3 , j = 2, 3,
Ã
∗
hj := 31 a2j,1
(+)
h2j
(7.40)
(+) (−)
+ hj hj +
−2aj,1 bj,1 h̃j +
b2j,1 ,
(−)
h2j
!
(7.41)
j = 2, 3.
Moreover, let s ≥ 2 and
∂ik u ∈ [L2 (Ω)]3 , k = 1, s; i = 2, 3,
∂ik ∂j u ∈ [L2 (Ω)]3 , k = 1, s; i = 2, 3; j = 1, 2, 3,
(7.42)
hj,1 ∂ik ∂j u ∈ [L2 (Ω)]3 , k = 1, s; i = 2, 3; j = 2, 3,
h̃j,1 ∂ik ∂j u ∈ [L2 (Ω)]3 , k = 1, s; i = 2, 3; j = 2, 3.
(j)
Then for N (j) − Nmin ≤ C0 with C0 independent of N(j) (j = 2, 3), we have
0
0
°
°
(2)
(3) °2
°
(h2 )2s
(h3 )2s
(2)
(2)
°u − N w,N °
q (N ) +
q (3) (N(3) ), (7.43)
°
° 1 3≤
(2) 2s−3
(3) 2s−3
(Nmin )
(Nmin )
[H (Ω)]
0
j
(j)
(j)
hj := max hj (x1 ), q (N ) → 0 as N → ∞,
[0,L]
j = 2, 3.
Proof. It can be shown (see Appendix B) that the conditions (7.40) imply
that the partial double Fourier-Legendre sums SN (2) ,N (3) of the vector–function
i
i
u
(2)
(3)
µ
¶µ
¶
Ni
i
X N
X
1
1
(2)
(3)
SN (2) ,N (3) (x1 , x2 , x3 ) :=
a2 a3 r +
r +
uir(2) r(3) (x1 )
i
i
2
2
(2)
(3)
r
=0 r
=0
(j)
×Pr(2) (a2 x2 − b2 ) Pr(3) (a3 x3 − b3 ) , Ni
= 0, ∞; j = 2, 3, i = 1, 2, 3,
where
(+) (+)
Zh 2 Zh 3
ui (x1 , x2 , x3 )Pr(2) (a2 x2 − b2 )
uir(2) r(3) (x1 ) :=
(−) (−)
h2 h3
99
×Pr(3) (a3 x3 − b3 )dx2 dx3 ,
r(j) = 0, ∞;
j = 2, 3, (7.44)
∼
belong to the space V N (2) ,N (3) (Ω, ΓL ) ⊂ H 1 (Ω, ΓL ).
i
i
Introduce
εN (2) ,N (3) (x1 , x2 , x3 ) := ui (x1 , x2 , x3 ) − SN (2) ,N (3) (x1 , x2 , x3 )
i
i
i
i
µ
¶
µ
¶
∞
∞
X
X
1
1
(2)
(3)
=
a2 a3 r +
r +
2
2
(2)
(3)
r(2) =Ni
+1 r(3) =Ni
+1
×uir(2) r(3) (x1 )Pr(2) (a2 x2 − b2 ) Pr(3) (a3 x3 − b3 ) .
Our goal is to estimate the norm of εNi (2) ,N (3) in H 1 (Ω).
i
Applying the recurrence relation
Pr (t) =
¤
1 £ 0
0
Pr+1 (t) − Pr−1
(t) ,
2r + 1
r ≥ 1,
from (7.44) we get
h
1
uir(2) r(3) (x1 ) =
i
(∂2 ui )r(2) −1 r(3) − (∂2 ui )r(2) +1 r(3)
a2 (2r(2) + 1)
h
i
1
(∂3 ui )r(2) r(3) −1 − (∂3 ui )r(2) r(3) +1 . (7.45)
=
a3 (2r(3) + 1)
From (7.45) it follows
¯¯
¯¯2
¯¯
¯¯
− 21
¯¯(h2 h3 ) uir(2) r(3) ¯¯
L2 (]0,L[)
µ ¶2s
0
c̃1 h2
≤
(r(2) )2s
(2) +s
rX
¯¯
¯¯2
1
¯¯
¯¯
¯¯(h2 h3 )− 2 (∂2s ui )l(2) r(3) ¯¯
, (7.46)
¯¯2
¯¯
¯¯
¯¯
− 21
s
¯¯(h2 h3 ) (∂3 ui )r(2) l(3) ¯¯
, (7.47)
L2 (]0,L[)
l(2) =r(2) −s
¯¯2
¯¯
1
¯¯
¯¯
¯¯(h2 h3 )− 2 uir(2) r(3) ¯¯
L2 (]0,L[)
µ ¶2s
0
c̃2 h3
≤
(r(3) )2s
(3) +s
rX
L2 (]0,L[)
l(3) =r(3) −s
0
with constants c̃1 and c̃2 , independent of ui , r(j) , hj (i = 1, 2, 3, j = 2, 3).
100
By virtue of (7.46) and (7.47) we have
¶1 µ
¶1
¯¯ µ
¯¯2
1 2
¯¯ (2) 1 2
¯¯
− 21
(3)
r +
(h2 h3 ) uir(2) r(3) ¯¯
¯¯ r +
2
2
L2 (]0,L[)
µ ¶2s
0
c1 h2
≤
(2) +s
rX
(r(2) )2s
l(2) =r(2) −s
− 12
×(h2 h3 )
µ ¶2s
¶1 µ
¶1
¯¯ µ
1 2
¯¯ (2) 1 2
(3)
r +
¯¯ l +
2
2
(∂2s ui )l(2) r(3)
¯¯2
¯¯
¯¯
L2 (]0,L[)
0
¶1 µ
¶1
¯¯ µ
¯¯ (2) 1 2 (3) 1 2
+
l +
¯¯ r +
(r(3) )2s (3) (3)
2
2
l =r −s
¯¯2
¯¯
s
− 12
×(h2 h3 ) (∂3 ui )r(2) l(3) ¯¯
c2 h3
(3) +s
rX
L2 (]0,L[)
(7.48)
0
with constants c1 and c2 , independent of ui , r(j) , hj , (i = 1, 2, 3, j = 2, 3).
Analogously, due to (7.48) we derive
¶1 µ
¶ 12
¯¯2
¯¯ µ
1
¯¯
¯¯ (2) 1 2
(3)
− 12
r +
(h2 h3 ) (∂k ui )r(2) r(3) ¯¯
¯¯ r +
2
2
L2 (]0,L[)
µ ¶2s
0
c1 h2
≤
(r(2) )2s
(2) +s
rX
l(2) =r(2) −s
¶1 µ
¶1
¯¯ µ
1 2
¯¯ (2) 1 2
(3)
r +
¯¯ l +
2
2
¯¯2
1
¯¯
×(h2 h3 )− 2 (∂2s ∂k ui )l(2) r(3) ¯¯
L2 (]0,L[)
µ ¶2s
0
c2 h3
+
(r(3) )2s
(3) +s
rX
l(3) =r(3) −s
¶1 µ
¶1
¯¯ µ
¯¯ (2) 1 2 (3) 1 2
l +
¯¯ r +
2
2
¯¯2
1
¯¯
×(h2 h3 )− 2 (∂3s ∂k ui )r(2) l(3) ¯¯
L2 (]0,L[)
,
i, k = 1, 2, 3,
¶1 µ
¶1
¯¯ µ
¯¯
³
´
1 2
¯¯ (2) 1 2
¯¯
− 12
(3)
hj,1 ∂j ui (2) (3) ¯¯
(h2 h3 )
r +
¯¯ r +
2
2
L2 (]0,L[)
r r
101
(7.49)
µ ¶2s
0
c1 h2
≤
(2) +s
rX
(r(2) )2s
l(2) =r(2) −s
− 12
³
×(h2 h3 )
¶1 µ
¶1
¯¯ µ
1 2
¯¯ (2) 1 2
(3)
r +
¯¯ l +
2
2
hj,1 ∂2s ∂j ui
´
l(2) r
¯¯2
¯¯
¯¯
(3)
L2 (]0,L[)
µ ¶2s
0
c2 h3
+
(3) +s
rX
(r(3) )2s
l(3) =r(3) −s
³
− 12
×(h2 h3 )
¶1 µ
¶1
¯¯ µ
¯¯ (2) 1 2 (3) 1 2
l +
¯¯ r +
2
2
hj,1 ∂3s ∂j ui
´
r
¯¯2
¯¯
¯¯
(2) (3)
L2 (]0,L[)
l
,
(7.50)
i = 1, 2, 3, j = 2, 3,
¶1 µ
¶1
¯¯ µ
¯¯
³
´
1
1 2
¯¯ (2) 1 2
¯¯
(3)
r +
(h2 h3 )− 2 h̃j,1 ∂j ui (2) (3) ¯¯
¯¯ r +
2
2
r r
L2 (]0,L[)
µ ¶2s
0
c1 h2
≤
(2) +s
rX
2s
(r(2) )
l(2) =r(2) −s
− 12
³
×(h2 h3 )
¶1 µ
¶1
¯¯ µ
1 2
¯¯ (2) 1 2
(3)
r +
¯¯ l +
2
2
h̃j,1 ∂2s ∂j ui
´
l(2) r
¯¯2
¯¯
¯¯
(3)
L2 (]0,L[)
µ ¶2s
0
c2 h3
+
(r(3) )2s
(3) +s
rX
l(3) =r(3) −s
− 12
×(h2 h3 )
³
¶1 µ
¶1
¯¯ µ
¯¯ (2) 1 2 (3) 1 2
l +
¯¯ r +
2
2
h̃j,1 ∂3s ∂j ui
´
r
¯¯2
¯¯
¯¯
(2) (3)
l
L2 (]0,L[)
,
(7.51)
j = 2, 3.
By the Parseval equality along with evident calculations we arrive at the
(j)
relations (without loss of generality we assume that Ni , j = 2, 3, are odd)
µ
¶
ZL
∞
∞
¯¯
¯¯2
X
X
1
¯¯
¯¯
−1 −1
(2)
=
h2 h3 r +
¯¯εN (2) ,N (3) ¯¯
i
i
2
L2 (Ω)
(2)
(3)
r(2) =Ni
µ
× r
(3)
1
+
2
+1 r(3) =Ni
+1 0
¶
(uir(2) r(3) )2 dx1 ,
(7.52)
102
¯¯
¯¯2
¯¯
¯¯
¯¯∂2 εN (2) ,N (3) ¯¯
i
L2 (Ω)
i
µ
× r
1
+
2
(3)
¶ h³
Ni
+
r
(2)
r(2) =Ni +1
(3)
r(3) =Ni +1
∂2 ui
(3)
X µ
∞
X
´
(3)
r(3) =0
1
+
2
i2
r(2) r(3)
¶
(2)
−1
h−1
2 h3
(2)
(2)
ZL
−1
h−1
2 h3
·³
ZL
−1
h−1
2 h3
∂ 2 ui
(2)
Ni
L2 (Ω)
i
× r
1
+
2
X µ
¶ h³
+
r
(2)
r(2) =0
+
(2)
r(2) =Ni +1
(3)
r(3) =Ni +1
´
∂3 ui
(2)
Ni
∞
X
1
+
2
i2
r(2) r(3)
¶
(3)
+ 1)
(3)
−1
h−1
2 h3
4
r
(2)
·³
ZL
−1
h−1
2 h3
·³
−1
h−1
2 h3
×
´
h³
∂ 1 ui
i2
r(2) r(3)
¶
¸2
∂ 3 ui
(3)
r(2) Ni
+1
+1
dx1
0
103
¸2
´
∂3 ui
(3)
r(2) Ni
dx1 ,
hskip6cmi = 1, 2, 3, j = 2, 3,
µ
¶µ
¶
∞
¯¯
¯¯2
1
1
X
¯¯
¯¯
(2)
(3)
≤ 5
r +
r +
¯¯∂1 εN (2) ,N (3) ¯¯
i
i
2
2
L2 (Ω)
(2)
ZL
1
+
2
0
´
0
r(2) =Ni
(7.53)
dx1
Ni (Ni − 1)
4
ZL
dx1
(2) (3)
r
Ni
µ
−1
h−1
2 h3
0
(3)
(3)
Ni (Ni
¸2
dx1 ,
ZL
∞
X
=
¶
´
∂2 ui
+1 r(3)
(3)
·³
¸2
´
0
¯¯
¯¯2
¯¯
¯¯
¯¯∂3 εN (2) ,N (3) ¯¯
1
+
2
0
0
(2)
µ
r
(2)
dx1
Ni (Ni − 1)
4
Ni (Ni + 1)
+
4
i
µ
ZL
∞
X
=
dx1
(7.54)
(3)
L
X Z
µ
Ni
+
r(3) =0
−1
h−1
2 h3
×
·³
×
³
2
(h2,1 ) +
(2)
Ni
(2)
L
X Z
2
+ 2 (h2,1 ) +
µ
−1
h−1
2 h3
r
r(2) =0 0
·
×
(3)
Ni
(2)
Ni
+1
(·
³
∂ 2 ui
4
³
h3,1
´2
³
+
(2)
³
´2
(2) ∼
Ni h2,1
1
+
2
(3)
Ni
¶
(3)
Ni
4
¸2
´
(2) (3)
r
Ni
´
´ ³ ∼ ´2 ¸ ·³
+ 2 h2,1
+ ∂ 2 ui
(2)
Ni
´
Ni
+
¶
0
·
(2)
Ni
1
r(3) +
2
¸2
(2)
Ni
+1r(3)
¸¾
+1
dx1
(·
³
¸2
´
∂ 3 ui
(3)
r(2) Ni
´³∼ ´2 ¸ ·³
´
+ 2 h3,1
+ ∂ 3 ui
¸2
(3)
r(2) Ni
+1
·³
¶
´³
´2
³
´2 ¸¾
(3)
(3) ∼
× Ni + 2 h3,1 + Ni h3,1
dx1 , i = 1, 2, 3.
From (7.42), (7.52), and (7.48) we have
³ 0 ´2s
¯¯
¯¯2
´
³
h2
¯¯
¯¯
(2)
(2)
≤³
¯¯εN (2) ,N (3) ¯¯
´(2s) qi0 Ni
i
i
L2 (Ω)
(2)
Ni
³ 0 ´2s
³
´
h3
(3)
(3)
+³
´(2s) qi0 Ni ;
(3)
Ni
´
³
(j)
(j)
(j)
here and in what follows qik Ni
→ 0 as Ni → ∞,
(7.55)
(7.56)
j = 2, 3;
i =
1, 2, 3, k = 0, 3.
Quite similarly, taking into account the relation
³
´
hα2 hβ3 ui,23 = hα2 hβ3 ui
,
,23
from (7.42), (7.53)–(7.55), and (7.49)–(7.51) we arrive at inequalities
³ 0 ´2s
¯¯2
¯¯
´
³
h2
¯¯
¯¯
(2)
(2)
≤ ³
q
N
¯¯∂k εN (2) ,N (3) ¯¯
´2s−3 ik
i
i
i
L2 (Ω)
(2)
Ni
³ 0 ´2s
´
³
h3
(3)
(3)
+ ³
´2s−3 qik Ni , k = 1, 2, 3.
(3)
Ni
104
(7.57)
Combining (7.56) and (7.57) we have
³ 0 ´2s
3
³
´
X
h2
(2)
(2)
≤ ³
qik Ni
´2s−3
(2)
k=0
Nmin
³ 0 ´2s
3
´
³
X
h3
(3)
(3)
+ ³
qik Ni .
´2s−3
(3)
k=0
Nmin
¯¯
¯¯2
¯¯
¯¯
¯¯εN (2) ,N (3) ¯¯
i
H 1 (Ω)
i
(7.58)
Invoking inequality (7.36) with
³
´ ∼
w = SN(2) ,N(3) , SN(2) ,N(3) , SN(2) ,N(3) ∈ V N(2) ,N(3) (Ω, ΓL )
1
1
2
2
3
3
and taking into consideration the coercivity and boundedness properties of the
bilinear form B(· , ·) we obtain inequality (7.43). 2
105
Appendix A. Proof of Lemma 3.10.
(−)
(+)
It is evident that there exist functions gj (x1 ) and gj (x1 ), j = 2, 3, of the
space C 1 ([0, L]) such that
(−)
gj
(−)
(x1 ) ≤ hj (x1 ) and
moreover,
µ
(+)
gj
(+)
(+)
hj (x1 ) ≤ gj (x1 ) for 0 < x1 < L, j = 2, 3;
(x1 )−
(−)
gj
¶¯
¯
(x1 ) ¯¯
> 0, j = 2, 3,
(A.1)
(A.2)
x1 ∈[0,L]
(±)
(±)
and gj (L) = hj (L), j = 2, 3.
Let
(+)
(−)
Ω∗ := {(x1 , x2 , x3 ) ∈ R3 : 0 < x1 < L, gj (x1 ) < xj < gj (x1 ), j = 2, 3}
and
(−)
(+)
Γ∗L := {(x1 , x2 , x3 ) ∈ R3 : x1 = L, gj (L) < xj < gj (L), j = 2, 3}.
Due to the inequalities (A.1) then we have
Ω ⊂ Ω∗ ,
ΓL = Γ∗L .
(A.3)
Further, let w10 be an arbitrary element from the space H 1 (Ω, ΓL ). On
the one hand, since Ω is a Lipschitz domain and (A.3) holds, there exists an
extension w1∗ of the function w10 onto the domain Ω∗ such that w1∗ ∈ H 1 (Ω∗ , Γ∗L )
(see, e.g., [20]). On the other hand, since the space C ∞ (Ω∗ , Γ∗L ) is dence in
H 1 (Ω∗ , Γ∗L ), for arbitrary ε > 0 there exists a function w1 ∈ H 2 (Ω∗ , Γ∗L ) :=
{w ∈ H 2 (Ω∗ ) : w|Γ∗L = 0} such that
ε
||w1∗ − w1 ||H 1 (Ω∗ ) < .
2
(A.4)
Let SN (2) ,N (3) (w1 ) be the partial double Fourier–Legendre sums of w1 , i.e.,
1
1
(2)
SN (2) ,N (3) (w1 ) :=
1
1
µ
(3)
1
X
X N
N1
(2)
r1
a2 a3
(3)
(2)
r1 =0 r1 =0
×Pr(3) (a3 x3 − b3 ) w1 r(2) r(3) ,
1
1
1
106
1
+
2
¶µ
(3)
r1
1
+
2
¶
Pr(2) (a2 x2 − b2 )
1
(A.5)
where
(+) (+)
w1 r(2) r(3)
1
1
Zg3 Zg2
:=
w1 (x1 , x2 , x3 ) Pr(2) (a2 x2 − b2 )
1
(−) (−)
g3 g2
×Pr(3) (a3 x3 − b3 ) dx2 dx3 ,
(A.6)
1
(i)
(i)
0 ≤ r1 ≤ N1 , i = 2, 3,
are double moments of the function w1 . As for as w1 ∈ H 2 (Ω∗ , Γ∗L ), by (A.2),
(A.5), and (A.6) we see that
SN (2) ,N (3) (w1 ) ∈ VeN (2) ,N (3) (Ω∗ , Γ∗L ),
1
1
(A.7)
1
1
since it has the form similar to (7.3). Taking into consideration inequality
(A.2) and applying estimate (7.58) for the regular (noncusped) case (when
s = 2 and i = 1), we derive the relation
(2)
||w1 −SN (2) ,N (3) (w1 )||H 1 (Ω∗ )
1
1
(3)
q2 (N1 ) q3 (N1 )
≤
+
,
(2)
(3)
N1
N1
(2)
Therefore there are sufficiently large integers N1
(i)
lim qi (N1 ) = 0, i = 2, 3.
(i)
N1 →∞
(2)
and N1
such that
ε
||w1 − SN (2) ,N (3) (w1 )||H 1 (Ω∗ ) < .
1
1
2
(A.8)
The inclusions (A.3) and (A.7) imply that
SN (2) ,N (3) (w1 )|Ω ∈ VeN (2) ,N (3) (Ω, ΓL ).
1
1
1
(A.9)
1
Now from (A.4), (A.8), and (A.9) it follows that
|| w10 −SN (2) ,N (3) (w1 )|Ω ||H 1 (Ω) ≤ ||w1∗ −w1 ||H 1 (Ω∗ ) +||w1 −SN (2) ,N (3) (w1 )||H 1 (Ω∗ ) < ε,
1
1
1
which completes the proof. 2
107
1
Appendix B. On conditions (3.40)
Here we will find out which kind of conditions have to satisfy a function u
ensuring the embedding
vi (x1 , x2 , x3 ) := a2 a3 uir(2) r(3) (x1 )Pr(2) (a2 x2 − b2 )Pr(3) (a3 x3 − b3 )
∈ H 1 (Ω, ΓL ), i = 1, 2, 3,
(B.1)
where
(+) (+)
Zh2 Zh3
uir(2) r(3) (x1 ) :=
ui (x1 , x2 , x3 )Pr(2) (a2 x2 − b2 )Pr(3) (a3 x3 − b3 )dx2 dx3 . (B.2)
(−) (−)
h2 h3
From (B.1) it follows
vi,1 = (a2 a3 ),1 uir(2) r(3) Pr(2) (a2 x2 − b2 )Pr(3) (a3 x3 − b3 )
+a2 a3 uir(2) r(3) ,1 Pr(2) (a2 x2 − b2 )Pr(3) (a3 x3 − b3 )
+a2 a3 uir(2) r(3) (a2,1 x2 − b2,1 )Pr0(2) (a2 x2 − b2 )Pr(3) (a3 x3 − b3 )
+a2 a3 uir(2) r(3) (a3,1 x3 − b3,1 )Pr(2) (a2 x2 − b2 )Pr0(3) (a3 x3 − b3 ),
(B.3)
vi,2 = a2 a3 uir(2) r(3) a2 Pr0(2) (a2 x2 − b2 )Pr(3) (a3 x3 − b3 ),
(B.4)
vi,3 = a2 a3 uir(2) r(3) a3 Pr0(3) (a3 x3 − b3 )Pr(2) (a2 x2 − b2 ).
(B.5)
It is evident that
uir(2) r(3) ,1 (x1 )
(+)
Zh3
=
(+)
(+)
(+)
(−)
(−)
(−)
ui (x1 , h2 (x1 ), x3 )Pr(2) (a2 h2 (x1 ) − b2 )Pr(3) (a3 x3 − b3 )dx3 × h2,1
(−)
h3
(+)
Zh3
−
ui (x1 , h2 (x1 ), x3 )Pr(2) (a2 h2 (x1 ) − b2 )Pr(3) (a3 x3 − b3 )dx3 × h2,1
(−)
h3
(+)
Zh2
+
(+)
(+)
(+)
ui (x1 , x2 , h3 (x1 ))Pr(2) (a2 x2 − b2 )Pr(3) (a3 h3 (x1 ) − b3 )dx2 × h3,1
(−)
h2
108
(+)
Zh2
(−)
(−)
(−)
ui (x1 , x2 , h3 (x1 ))Pr(2) (a2 x2 − b2 )Pr(3) (a3 h3 (x1 ) − b3 )dx2 × h3,1
−
(−)
h2
(+) (+)
Zh2 Zh3
+
ui,1 (x1 , x2 , x3 )Pr(2) (a2 x2 − b2 )Pr(3) (a3 x3 − b3 )dx2 dx3
(−) (−)
h2 h3
(+) (+)
Zh2 Zh3
ui (x1 , x2 , x3 )(a2,1 x2 − b2,1 )Pr0(2) (a2 x2 − b2 )Pr(3) (a3 x3 − b3 )dx2 dx3
+
(−) (−)
h2 h3
(+) (+)
Zh2 Zh3
ui (x1 , x2 , x3 )(a3,1 x3 − b3,1 )Pr(2) (a2 x2 − b2 )Pr0(3) (a3 x3 − b3 )dx2 dx3
+
(−) (−)
h2 h3
=:
7
X
Ii .
(B.6)
i=1
Taking into account the inequalities
max |Pr(j) (x1 )| , max |Pr0(j) (x1 )| ≤ M = const < +∞, j = 2, 3,
[−1,1]
[−1,1]
(B.7)
and applying Schwarz inequality we get from (B.2)
(+) (+)
2
Zh2 Zh3
|uir(2) r(3) (x1 )|2 ≤ M 4
1
·
|u
(x
,
x
,
x
)|dx
dx
i
1
2
3
2
3
(−) (−)
h2 h3
(+) (+)
(+) (+)
Zh2 Zh3
≤ M4
Zh2 Zh3
12 dx2 dx3
(−) (−)
u2i (x1 , x2 , x3 )dx2 dx3
(−) (−)
h2 h3
h2 h3
(+) (+)
µ(+) (−) ¶ µ(+) (−) ¶ Zh2 Zh3
= M 4 h2 − h2
h3 − h3
u2i (x1 , x2 , x3 )dx2 dx3
(−) (−)
h2 h3
(+) (+)
Zh2 Zh3
= 4M 4 h2 h3
u2i (x1 , x2 , x3 )dx2 dx3 .
(−) (−)
h2 h3
109
(B.8)
With the help of (B.1) and (B.8) we derive
(+) (+)
ZL
Zh2 Zh3
||vi ||2L2 (Ω) =
a22 a23 u2r(2) r(3)
0
Pr2(2) (a2 x2 − b2 )Pr2(3) (a3 x3 − b3 )dx3 dx2 dx1
(−) (−)
h2 h3
ZL
≤ 4M 4
ZL
a22 a23 u2r(2) r(3) h2 h3 dx1 = 4M 4
0
ZL
≤ 4M 4
(h2 h3 )−1
0
(h2 h3 )−1 u2ir(2) r(3) dx1
0
(+) (+)
Zh2 Zh3
4M 4 h2 h3
u2i (x1 , x2 , x3 )dx2 dx3
(−) (−)
dx1
h2 h3
(+) (+)
ZL Zh2 Zh3
= 16M
8
u2i (x1 , x2 , x3 )dx2 dx3 dx1 = 16M 8 ||ui ||2L2 (Ω) .
0
(B.9)
(−) (−)
h2 h3
Quite similarly, from (B.4), (B.5), (B.7), and (B.8) we have
(+) (+)
ZL
||vi,2 ||2L2 (Ω) =
Zh2 Zh3
2
a42 a23 u2ir(2) r(3)
0
Pr0(2) (a2 x2 − b2 )Pr2(3) (a3 x3 − b3 )dx3 dx2 dx1
(−) (−)
h2 h3
ZL
≤ 4M 4
a42 a23 u2ir(2) r(3) h2 h3 dx1
0
ZL
≤ 4M 4
0
(+) (+)
h2 Zh3
Z
−3 −1
4
2
h2 h3
4M h2 h3
ui (x1 , x2 , x3 )dx2 dx3 dx1
(−) (−)
h2 h3
(+) (+)
ZL Zh2 Zh3
2
h−2
2 ui (x1 , x2 , x3 )dx2 dx3 dx1
= 16M 8
0
(−) (−)
h2 h3
= 16M 8 ||h−1
2 ui ||L2 (Ω) ,
(B.10)
||vi,3 || ≤ 16M 8 ||h−1
3 ui ||L2 (Ω) .
(B.11)
110
These inequalities yield
Z
[(a2 a3 ),1 uir(2) r(3) Pr(2) (a2 x2 − b2 )Pr(3) (a3 x3 − b3 )]2 dx3 dx2 dx1
Ω
ZL
ZL
[(h2 h3 ),1 ]2 2
u (2) (3) dx1
(h2 h3 )3 ir r
0
0
(+) (+)
h
h
L
Z
Z 2Z 3
2
[(h
h
)
]
2
3
,1
4
4
2
≤ 4M
dx
dx
dx1
u
4M
h
h
2
3
2
3
i
(h2 h3 )3
0
(−) (−)
[(a2 a3 ),1 ]2 u2ir(2) r(3) h2 h3 dx1 = 4M 4
≤ 4M 4
h2 h3
ZL
= 16M 8
0
(+) (+)
2
[(h2 h3 ),1 ]
(h2 h3 )2
Zh2 Zh3
u2i dx2 dx3 dx1
(−) (−)
h2 h3
¯¯2
¯¯
¯¯
¯¯
8 ¯¯ (h2 h3 ),1 ui ¯¯
,
= 16M ¯¯
(h2 h3 ) ¯¯L2 (Ω)
Z
£
(B.12)
¤2
a2 a3 uir(2) r(3) (a2,1 x2 − b2,1 )Pr0(2) (a2 x2 − b2 ) Pr(3) (a3 x3 − b3 ) dx3 dx2 dx1
Ω
(+) (+)
ZL
Zh2 Zh3
a22 a23 u2ir(2) r(3)
≤
0
M 4 (a2,1 x2 − b2,1 )2 dx3 dx2 dx1
(−) (−)
h2 h3
ZL
= 2 M4
(+)
Zh2
2 2 2
a2 a3 uir(2) r(3) h3 (a2,1 x2 − b2,1 )2 dx2 dx1
0
(−)
h2
ZL
= 2M
4
a22 a23 u2ir(2) r(3)
0
h3
ZL Zh2 Zh3 h
0
3
Ã
a22,1 h2
(+)
2
(+) (−)
1 2
a
3 2,1
Ã
(+)
2
(+) (−)
(−)
2
h2 + h2 h2 + h2
(−) (−)
h2 h3
i
−2a2,1 b2,1 h˜2 + b22,1 u2i dx3 dx2 dx1
111
(−)
h2 + h2 h2 + h2
i
2
˜
−4 a2,1 b2,1 h2 h2 + 2 b2,1 h2 dx1
(+) (+)
≤ 16M 8
h2
!
2
!
¯¯ 1 ¯¯2
¯¯ ∗ 2 ¯¯
¯¯
¯¯
= 16M 8 ¯¯h2 ui ¯¯
¯¯
¯¯
,
(B.13)
L2(Ω)
where
1
hj = a2j,1
3
Ã
∗
(+)
2
(+) (−)
(−)
2
!
− 2aj,1 bj,1 h˜j + b2j,1 , j = 2, 3.
hj + hj hj + hj
(B.14)
By the same type arguments we derive
Z
£
¤2
a2 a3 uir(2) r(3) (a3,1 x3 − b3,1 )Pr(2) (a2 x2 − b2 )Pr0(3) (a3 x3 − b3 ) dx3 dx2 dx1
Ω
¯¯ 1 ¯¯2
¯¯ ∗ 2 ¯¯
¯¯
¯¯
≤ 16M 8 ¯¯h3 ui ¯¯
¯¯
¯¯
,
(B.15)
L2 (Ω)
∗
where h3 is given
·(−) by (B.14).
¸
(+)
For x2 ∈ h2 (x1 ), h2 (x1 ) we have
(+)
Zh2
(+)
ui (x1 , h2 (x1 ), x3 ) = ui (x1 , x2 , x3 ) +
ui,2 (x1 , x2 , x3 )dx2 .
(B.16)
2
x2
Whence
(+)
u2i (x1 , h2 (x1 ), x3 ) ≤ 2u2i (x1 , x2 , x3 ) + 2
(+)
Zh2
1 · ui,2 (x1 , x2 , x3 )dx2
x2
(+)
(+)
Zh2
≤ 2u2i (x1 , x2 , x3 ) + 2
Zh2
12 dt
x2
u2i,2 (x1 , x2 , x3 )dx2
x2
(+)
Zh2
u2i,2 (x1 , x2 , x3 )dx2 .
≤ 2u2i (x1 , x2 , x3 ) + 4h2
(B.17)
(−)
h2
(−)
(+)
Integrate both parts of inequality (B.17) with respect to x2 from h2 to h2
(+)
Zh2
(+)
2h2 u2i (x1 , h2 (x1 ), x3 ) ≤ 2
u2i (x1 , x2 , x3 )dx2
(−)
h2
112
(+)
Zh2
u2i,2 (x1 , x2 , x3 )dx2 ,
+8h22
(B.18)
(−)
h2
i.e.,
(+)
Zh2
(+)
u2i (x1 , h2 (x1 ), x3 ) ≤ h−1
2
u2i (x1 , x2 , x3 )dx2
(−)
h2
(+)
Zh2
u2i,2 (x1 , x2 , x3 )dx2 .
+4h2
(B.19)
(−)
h2
Analogously we get the following inequalities
(+)
Zh2
(−)
u2i (x1 , h2 (x1 ), x3 ) ≤ h−1
2
u2i (x1 , x2 , x3 )dx2
(−)
h2
(+)
Zh2
u2i,2 (x1 , x2 , x3 )dx2 ,
+4h2
(B.20)
(−)
h2
(+)
Zh3
(±)
u2 (x1 , x2 , h3 (x1 )) ≤ h−1
3
u2 (x1 , x2 , x3 )dx3
(−)
h3
(+)
Zh3
u2,3 (x1 , x2 , x3 )dx3 .
+4h3
(−)
h3
Further we apply relations (B.6), (B.7), and (B.19)–(B.21) to obtain
Z
[a2 a3 I1 (x1 )Pr(2) (a2 x2 − b2 )Pr(3) (a3 x3 − b3 )]2 dx3 dx2 dx1
Ω
113
(B.21)
Z
(+) (+)
ZL
≤ M4
a22 a23 I12 (x1 )dx3 dx2 dx1 = M 4
Zh2 Zh3
a22 a23 I12 (x1 ) dx1
0
Ω
(−) (−)
h2 h3
ZL
ZL
a22 a23 I12 (x1 )h2 h3 dx1 = 4M 4
= 4M 4
0
≤ 4M 4
(h2 h3 )−1 I12 (x)dx1
0
ZL
1dx2 dx3
2
(+)
Zh3
(+)
(h2 h3 )−1
h 2,1
0
(+)
|ui (x1 , h2 (x1 ), x3 )|M 2 dx3
dx1
(−)
h3
(+)
(+)
h
h
L
Z
Z3
³(+) ´2 Z 3
(+)
−1
8
2
2
(h2 h3 )
≤ 4M
1 dx3 ui (x1 , h2 (x1 ), x3 )dx3 dx1
h 2,1
0
(−)
(−)
h3
h3
(+)
(+)
ZL
Zh2
³(+) ´2 Zh3
h−1
(h2 h3 )−1 h3 h 2,1
≤ 8M 8
u2i (x1 , x2 , x3 )dx2
2
0
(−)
(−)
h3
(+)
Zh2
+4h2
h2
u2i,2 (x1 , x2 , x3 )dx2
dx3
(−)
dx1
h2
(+) (+)
ZL Zh2 Zh3 ³(+) ´2
−2 2
= 8M 8
h 2,1 h2 ui (x1 , x2 , x3 )dx3 dx2 dx1
0
(−) (−)
h2 h3
(+) (+)
ZL Zh2 Zh3 ³(+) ´2
8
2
+32M
h 2,1 ui,2 (x1 , x2 , x3 )dx3 dx2 dx1
0
(−) (−)
h2 h3
¯¯2
¯¯
(+)
¯¯
¯¯
8 ¯¯ −1
= 8M ¯¯h2 h 2,1 ui ¯¯¯¯
¯¯2
¯¯
¯¯
¯¯ (+)
¯
¯
+ 32M ¯¯ h 2,1 ui,2 ¯¯¯¯
2
.
L2 (Ω)
L2 (Ω)
Similarly we have
Z
[a2 a3 I2 (x1 )Pr(2) (a2 x2 − b2 )Pr(3) (a3 x3 − b3 )]2 dx3 dx2 dx1
Ω
114
(B.22)
¯¯
¯¯2
¯¯ −1 (−)
¯¯
≤ 8M ¯¯¯¯h2 h 2,1 ui ¯¯¯¯
8
¯¯
¯¯2
¯¯(−)
¯¯
+ 32M ¯¯¯¯ h 2,1 ui,2 ¯¯¯¯
2
L2 (Ω)
,
(B.23)
L2 (Ω)
Z
[a2 a3 Ij (x1 ) Pr(2) (a2 x2 − b2 )Pr(3) (a3 x3 − b3 )]2 dx3 dx2 dx1
Ω
¯¯2
¯¯
¯¯
¯¯ −1 (±)
¯
¯
≤ 8M ¯¯h3 h 3,1 ui ¯¯¯¯
8
¯¯2
¯¯
¯¯
¯¯(±)
¯
¯
+ 32M ¯¯ h 3,1 ui,3 ¯¯¯¯
2
, j = 3, 4, (B.24)
L2 (Ω)
L2 (Ω)
Z
[a2 a3 I5 (x1 ) Pr(2) (a2 x2 − b2 )Pr(3) (a3 x3 − b3 )]2 dx3 dx2 dx1
Ω
≤ 16M 8 ||ui,1 ||2L
2 (Ω)
.
(B.25)
Due to (B.6) and (B.7) we derive
Z
[a2 a3 I6 (x1 ) Pr(2) (a2 x2 − b2 )Pr(3) (a3 x3 − b3 )]2 dx3 dx2 dx1
Ω
(+) (+)
ZL
Z
≤ M4
a22 a23 I62 (x1 )dx3 dx2 dx1 = M 4
Zh2 Zh3
a22 a23 I62 (x1 )
0
Ω
ZL
= 4M 4
1dx2 dx3
(−) (−)
h2 h3
ZL
(h2 h3 )−1 I62 (x1 )dx1 . (B.26)
a22 a23 I62 (x1 )h2 h3 dx1 = 4M 4
0
0
Applying Hölder’s inequality and arguing as in the proof of inequalities (B.8)
and (B.13) we get
I62 (x1 ) ≤ M 4
2
(+) (+)
Zh2 Zh3
|ui (x1 , x2 , x3 )| |a2,1 x2 − b2,1 |dx2 dx3
(−) (−)
h2 h3
(+) (+)
Zh2 Zh3
≤ M4
(−) (−)
h2 h3
(+) (+)
(+) (+)
Zh2 Zh3
u2i (x1 , x2 , x3 )dx2 dx3
(a2,1 x2 − b2,1 )2 dx2 dx3 ,
(B.27)
(−) (−)
h2 h3
(+) (+)
Zh2 Zh3
Zh2 Zh3
2
(a2,1 x2 − b2,1 ) dx2 dx3 =
(a22,1 x22 − 2a2,1 b2,1 x2 + b22,1 )dx2 dx3
(−) (−)
h2 h3
(−) (−)
h2 h3
115
(+)
Zh2
= 2h3 (a22,1 x22 − 2a2,1 b2,1 x2 + b22,1 )dx2
(−)
h2
¯x2 =(+)
3
x
¯ h2
= 2h3 (a22,1 2 − a2,1 b2,1 x22 + b22,1 x2 )¯ (−)
x2 =h2
"3
!
#
à 2
2
(+)
(−)
(−)
(+)
1 2
= 4h3 h2 a2,1 h2 + h2 h2 + h2 − 2a2,1 b2,1 h˜2 + b2,1 2 .
3
(B.28)
These inequalities imply
(+) (+)
∗
Zh2 Zh3
I62 (x1 ) ≤ 4M 4 h2 h3 h2
u2i (x1 , x2 , x3 )dx2 dx3 ,
(B.29)
(−) (−)
h2 h3
∗
where h2 is given by (B.14).
In accordance with (B.29) we have from (B.26)
Z
[a2 a3 I6 (x1 ) Pr(2) (a2 x2 − b2 )Pr(3) (a3 x3 − b3 )]2 dx3 dx2 dx1
Ω
(+) (+)
ZL Zh2 Zh3 ∗
8
≤ 16M
h2 u2i (x1 , x2 , x3 )dx3 dx2 dx1
0
(−) (−)
h2 h3
∗
1
2
= 16M || h2 ui ||2L2 (Ω) .
8
(B.30)
Quite analogously we get
Z
[a2 a3 I7 (x1 )Pr(2) (a2 x2 − b2 )Pr(3) (a3 x3 − b3 )]2 dx3 dx2 dx1
Ω
ZL
(h2 h3 )−1 I72 (x1 )dx1 ,
≤ 4M 4
(B.31)
0
(+) (+)
Zh2 Zh3
I72 (x1 ) ≤ M 4
(+) (+)
Zh2 Zh3
u2i (x1 , x2 , x3 )dx2 dx3
(a3,1 x3 − b3,1 )2 dx2 dx3 , (B.32)
(−) (−)
(−) (−)
h2 h3
h2 h3
116
(+) (+)
à 2
!
Zh2 Zh3
2
h1
(+)
(+) (−)
(−)
(a3,1 x3 − b3,1 )2 dx2 dx3 = 4 h2 h3 a23,1 h3 + h3 h3 + h3
3
(−) (−)
h2 h3
i
−2a3,1 b3,1 h˜3 + b3,1 2 ,
(B.33)
(+) (+)
∗
Zh2 Zh3
I72 (x1 ) ≤ 4M 4 h2 h3 h3
u2i (x1 , x2 , x3 )dx2 dx3 ,
(B.34)
(−) (−)
h2 h3
Z
[a2 a3 I7 (x1 )Pr(2) (a2 x2 − b2 )Pr(3) (a3 x3 − b3 )]2 dx3 dx2 dx1
Ω
¯¯ 1 ¯¯2
¯¯ ∗ 2 ¯¯
¯¯
¯¯
≤ 16M 8 ¯¯h3 ui ¯¯
¯¯
¯¯
,
(B.35)
L2 (Ω)
∗
where h3 is given by (B.14).
Note that the quantity ||vi ||2H 1 (Ω) can be estimated from above by the
right-hand side expressions of inequalities (B.9)–(B.13), (B.15), (B.22)–(B.25),
(B.30), and (B.35) and, therefore, the embedding (B.1), i.e., the inclusion
vi ∈ H 1 (Ω, ΓL ) will be automatically satisfied if the following conditions are
fulfilled
(±)
3
3
−1
h−1
h j,1 u ∈ [L2 (Ω)] ,
j u ∈ [L2 (Ω)] , hj
u,1 ∈ [L2 (Ω)]3 ,
(h2 h3 ),1
u ∈ [L2 (Ω)]3 ,
h2 h3
∗
j = 2, 3,
(B.36)
(±)
3
h j,1 u,j ∈ [L2 (Ω)] , j = 2, 3,
(B.37)
1
3
hj2 u ∈ [L2 (Ω)] , j = 2, 3.
(B.38)
∗
Here hj is given by (B.14).
(+)
(−)
Remark that in the case of a symmetric beam, i.e., if hj = hj = −hj ,
2, 3, we have bj = 0 and conditions (B.38) read as follows
i.e.,
j=
hj,1
u ∈ [L2 (Ω)]3 , j = 2, 3,
hj
(B.39)
(log hj ),j u ∈ [L2 (Ω)]3 , j = 2, 3.
(B.40)
117
(+)
(−)
κ
In addition, if hj = hj = −hj = kj x1 j , kj , κj = const, kj > 0, 0 ≤ κj ≤ 1, then
conditions (B.38) are written as
3
κj x−1
1 u ∈ [L2 (Ω)] , j = 2, 3.
(B.41)
Moreover, since 0 ≤ κj ≤ 1, conditions (B.36) and (B.37) are equivalent to the
inclusions
κ −1
u,1 ∈ [L2 (Ω)]3 , x1 j u,j ∈ [L2 (Ω)]3 , j = 2, 3.
(B.42)
References
[1] Agmon, S., Douglis, A., Nirenberg, L.: Estimates near the boundary for solutions of elliptic partial differential equations satisfying general
boundary conditions, II. Comm. Pure Appl. Math. 17 (1964), 35-92.
[2] Avalishvili, M., Gordeziani, D.: Investigation of a hierarchical model
of prismatic shells, Bull. Georgian Acad. Sci., 165, 3(2001), 485-488.
[3] Avalishvili M.: Investigation of a mathematical model of elastic bar with
variable cross-section, Bull. Georgian Acad. Sci., 166, 1(2002), 16-19.
[4] Babuška, I., Li, L.: Hierarchical modelling of plates. Computers and
Structures, 40 (1991), 419-430.
[5] Chinchaladze, N.: Cylindrical bending of a prismatic shell with two
sharp edges in case of a strip. Reports of Enlarged Session of the Seminar
of I.Vekua Institute of Applied Mathematics, 10, No. 1 (1995), 21-23.
[6] Chinchaladze, N.: On the vibration of an elastic cusped plate. Reports
of Enlarged Session of the Seminar of I.Vekua Institute of Applied Mathematics, 14, No. 1 (1999), 12-20.
[7] Costabel, M.: Boundary Integral Operators on Lipschitz Domains: Elementary Results, SIAM J. Math. Anal., 19, 1988, 613-626.
[8] Fichera, G.: Existence Theorems in Elasticity, Boundary Constraints,
Handbuch der Phisik, Band 6a/2, Springer-Verlag, Berlin, 1972.
[9] Gilbarg, D., Trudinger, N.S.: Elliptic Partial Differential Equations
of Second Order. Berlin-Heidelberg-New York, Springer-Verlag, 1977.
[10] Gordeziani, D.G.: To the exactness of one variant of the theory of thin
shells. Soviet. Math. Dokl., 215 (1974) 4, 751-754.
[11] Guliaev, V., Baganov, V., Lizunov, P.: Nonclassical Theory of
Shells. Vischa Shkola, Lviv 1978. (Russian)
[12] Jaiani, G.V.: Elastic bodies with non-smooth boundaries–cusped plates
and shells. ZAMM, 76 (1996) Suppl. 2, 117-120.
[13] Jaiani, G.V.: Cylindrical bending of a rectangular plate with pover
law changing stiffness. Proceedings of Conference of Yoing Scientists in
Mathematics. Tbilisi University Press (1976),49-52. (Russian)
[14] Jaiani, G.V.: Solution of Some Problems for a Degenerate Elliptic Equation of Higher Order and Their Applications to Prismatic Shells. Tbilisi
University Press 1982 (Russian)
121
[15] Jaiani, G.: On a mathematical model of bars with variable rectangular cross-sections, ZAMM-Zeitschrift fuer Angewandte Mathematik und
Mechanik, Vol.81, 3, pp.147-173, 2001.
[16] Jaiani, G., Kharibegashvili, S., Natroshvili, D., and Wendland,
W.L.: Hierarchical models for cusped plates, Preprint 2002/13, University of Stuttgart,Mathematical Institute A,Stuttgart 2002.
[17] Khoma, I.: The Generalized Theory of Anisotropic Shells. Naukova
Dumka, Kiev 1986. (Russian)
[18] Khvoles, A.R.: The general representation for solutions of equilibrium
equations of a prismatic shell with variable thickness. Seminar of the Institute of Applied Mathematics of Tbilisi State University, Annot. of Reports, 5 (1971), 19-21. (Russian)
[19] Lions, J.L., Magenes, E.: Non-Homogeneous Boundary Value Problems and Applications, Springer, 1972.
[20] McLean, W.: Strongly Elliptic Systems and Boundary Integral Equations, Cambridge University Press, 2000.
[21] Meunargia, T.V.: On nonlinear and nonshallow shells. Bulletin of
TICMI, 2 (1998) 46-49.
[22] Naguleswaran, S.: The vibration of Euler-Bernoulli beam of constant
depth and width convex parabolic variation in Breadth. Nat. Conf. Publ.
Inst. Eng., Austr. V.9 (1990), 204-209.
[23] Naguleswaran, S.: Vibration of an Euler-Bernoulli beam of constant
depth and with linearly varying breadth. J. Sound Vib., 153, No.3 (1992),
509-522.
[24] Naguleswaran, S.: A direct solution for the transvese vibration of EulerBernoulli wedge and cone beams. J. Sound Vib. 172, No. 3, May (1994),
289-304.
[25] Naguleswaran, S.: Vibration in the two principal planes of a nonuniform beam of rectangular cross-section, one side of which varies as
the square root of the axial coordinate. J. Sound Vib., 172, No. 3, May
(1994), 305-319 (doi: 10.1006/jsvi, 1994, 1177).
[26] Naguleswaran, S.: The vibration of a ”complete” Euler-Bernulli beam
of constant depth and breadth proportional to axial coordinate raised to
a positive exponent. J. Sound Vib., 187, No. 2, October (1995), 311-327.
[27] Nečas, J.: Les Méthodes Directes en Théorie des Équations Elliptiques,
Masson, Paris, 1967.
122
[28] Olenik, O.A., Shamaev, A.S., and Yosifian, G.A.: Mathematical
Problems in Elastisity and Homogenization, Studies in Mathematics and
its Applications, Vol.26, North-Holland Publ., Amsterdam, New York,
1992.
[29] Schwab, C.: A-posteriori modelling error estimation for hierarchical
Plate Models. Numerische Mathematik, 74 (1996), 221-259.
[30] Uzunov, S.G.: Variational-difference approximation of a degenerate ordinary differential equation of fourth order. In collection: Correct Boundary Value Problems for Nonclassical Equations of Mathematical Physics,
Novosibirsk (1980), 159-164. (Russian)
[31] Uzunov, S.G.: Estimate of convergence of the finite elements method for
a degenerate differential equation. In collection: Boundary Value Problems for Non-linear Equations, Novosibirsk (1982), 68-74. (Russian)
[32] Vashakmadze, T.S.: The Theory of Anisotropic Plates. Kluwer Academic Publishers, Dordrecht-London-Boston 1999.
[33] Vekua, I.N.: On a way of calculating of prismatic shells. Proceedings of
A. Razmadze Institute of Mathematics of Georgian Academy of Sciences,
21 (1955), 191-259. (Russian)
[34] Vekua, I.N.: Shell Theory: General Methods of Construction. Pitman
Advanced Publishing Program, Boston-London-Melbourne 1985.
[35] Zhgenti, V.S.: To investigation of stress state of isotropic thick-walled
shells of nonhomogeneous structure. Applied Mechanics, 27 (1991) 5, 3744.
121