Document 11105141

Integrating a RESON 7131 Forward Looking Sonar into the REMUS 2500
Underwater Autonomous Vehicle by
ENS Robert Everett Bruss
ARCHIVES
MASSACHUSETTS rF
INSTITUTE
JUL 3 0 2015 B.S., Systems Engineering U.S. Naval Academy (2013)
Submitted to the Department of Mechanical Engineering in partial fulfillment of the requirements for the degree of
Master of Science in Mechanical Engineering at the
MASSACHUSETTS INSTITUTE OF TECHNOLOGY
LIBRARIES
June 2015
@ ENS Robert Everett Bruss, MMXV. All rights reserved.
The author hereby grants to MIT and The Charles Stark Draper Laboratory, Inc.
permission to reproduce and to distribute publicly paper and electronic copies of this thesis document in whole or in part in any medium now known or hereafter created.
Author ........................................... .
AuthorSignature ig n t re e d a e d
redacted
Department of Mechanical Engineering
Certified by.........
Certified by.
A -, t~ May 08, 2015
Signature redacted
VDr. Michael J. Ricard
...............
Laboratory Technical Staff, Charles Stark Draper Laboratory, Inc.
-
Thesis Supervisor
Signature redacted
I Dr. Caiila C. Francolin
Senior Member of the Technical Staff, Charles Stark Draper Laboratory, Inc.
Certified by.
.......................
, TI-esis Supervisor
S n u
redacted
CDR Westb&L. Gray
Associate Professor of the Practice, Naval nstruction and Engineering
Accepted by.
A Arejx< Serisor
......................
Seredacted
.......
Professor David E. Hardt
Professor of Mechanical Engineering
Chairman, Committee on Graduate Students
THIS PAGE INTENTIONALLY LEFT BLANK
2
Integrating a RESON 7131 Forward Looking Sonar into the
REMUS 2500 Underwater Autonomous Vehicle by
ENS Robert Everett Bruss
Submitted to the Department of Mechanical Engineering on May 08, 2015, in partial fulfillment of the requirements for the degree of
Master of Science in Mechanical Engineering
Abstract
With the rapid increase in the availability and capability of robotic technology in the 21st century, unmanned vehicles have started to play a larger role accomplishing mundane, unpleasant, and dangerous tasks around the world. While their operations have not garnered them high visibility in the media, Unmanned Underwater Vehicles (UUVs) are playing an increasingly important role in both private and military operations. This thesis follows the process of integrating an advanced forward looking sonar (FLS) onto an existing UUV to increase object detection, avoidance, and classification capabilities. Conceptualization of the new vehicle hardware utilized computer-aided design to meet design requirements while maintaining all functions of the original vehicle. In order to minimize weight and manufacturing complexity, the structural design was then analyzed and optimized using finite element analysis. After a final design was submitted for review, computational fluid dynamics methods were used to quantify the lift and drag induced on the vehicle by the new FLS nose. This thesis also explores the broader hydrodynamic implications of utilizing angled faces on the nose of torpedo-like UUVs. At the time of publication, the author has submitted the proposed FLS nose integration design for review and for hopeful deployment in the summer of 2015.
Thesis Supervisor: Dr. Michael J. Ricard
Title: Laboratory Technical Staff, Charles Stark Draper Laboratory, Inc.
Thesis Supervisor: Dr. Camila C. Francolin
Title: Senior Member of the Technical Staff, Charles Stark Draper Laboratory, Inc.
3
IF
THIS PAGE INTENTIONALLY LEFT BLANK
4
Acknowledgments
First I would like to thank my family and friends for their patience and support. To my lab mates at Draper Lab: Will, Amy, and Casey, thank you for making Draper such an incredible place to come and work.
This thesis was prepared at The Charles Stark Draper Laboratory, Inc. A sincere thank you to all of the staff at Draper Lab for supporting my research and lending their expertise and advice to my project. I would especially like to thank my thesis advisor, Dr. Michael
Ricard, for the years of guidance and his commitment to making his community and the Lab a better place for students of all ages. I am also grateful for the support of my co-advisor,
Dr. Camila Francolin, for her counsel throughout the last year of my research. Lastly I would like to thank Glenn O'Grodnick for offering assisting and guiding my approach to vehicle design.
Next, I would like to thank the staff at NUWC who made the time to take me along on sorties, allow me to dissasemble the REMUS vehicle countless times, and answer multitudes of questions. Specifically I would like to thank Nathan Banks and Rick Kollanda for their direct and continued involvement with my project.
Lastly, I would like to thank my academic advisors CDR Jerrod Ketcham and CDR Wes
Grey for their guidance in my research and in my academic endeavors at MIT.
The views expressed in this thesis are those of the author and do not reflect the official policy or position of Draper Laboratoy, the United States Navy, Department of Defense, or the U.S. Government.
Robert E. Bruss, ENS USN 08 May 2015
5
THIS PAGE INTENTIONALLY LEFT BLANK
6
Contents
1 Introduction 13
2 FLS Integration and Design 19
. 19 2.1 Design Specifications ..............................
2.2 FLS Nose Design . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
2.3 Solenoid Actuation Section Design . . . . . . . . . . . . . . . . . . . . . . .
25
2.4 Initial Design Review . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
3 Structural Analysis 33
3.1 Goals of FEA Simulation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
3.2 Optimizing the Channel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
3.3 Optimizing the FLS Plate . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
3.4 Optimizing the Stringers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
3.5 FEA Results and Implications . . . . . . . . . . . . . . . . . . . . . . . . . . 45
4 Characterizing Hydrodynamic Coefficients 47
4.1 Fluid Simulation Goals . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
4.2 COMSOL Parameters . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
48
4.3 COMSOL Calculations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
4.4 Reproducing Crossflow Data . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
7
4.4.1 Simulation Geometry, Meshing, and Initialization . . . . . . . . . . . 51
4.4.2 R esults . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
4.5 Analyzing a Generic Angled Face . . . . . . . . . . . . . . . . . . . . . . . . 56
4.5.1 Simulation Geometry, Meshing, and Initialization . . . . . . . . . . . 56
4.5.2 R esults . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
4.6 Simulating Simplified FLS Model . . . . . . . . . . . . . . . . . . . . . . . . 62
4.6.1 Simulation Geometry, Meshing, and Initialization . . . . . . . . . . . 63
4.6.2 R esults . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
4.7 Implications of CFD Results . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
5 Conclusions 69
5.1 Thesis Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
69
5.2 Recommendations for Future Research Efforts . . . . . . . . . . . . . . . . . 70
A Additional Tables and Figures 71
8
List of Figures
1-1 Dimensions of RESON Seabat 7131 . . . . . . . . . . . . . . . . . . . .
1-2 RESON SeaBat 7131 (center) Compared to REMUS 2500 Nose (right)
14
15
2-1
2-2
2-3
FLS Supported on Frame With Angled Channel . . . . . . . . . . . . . . . .
22
Exploded View of FLS Nose. . . . . . . . . . . . . . . . . . . . . . .
Aspect Views of FLS Nose .. . . . . . . . . . . . . . . . . . . . . . .
. . . . .
. . . . .
23
24
2-4
2-5
Steps to Deploy LARS Chain Via Solenoid Assembly . . . . . . . . . . . . .
26
Steps to Release Emergency Ascent Weight Via Solenoid Assembly . . . . .
27
2-6 Steps to Release LARS Recovery Buoy Via Solenoid Assembly . . .
2-7 Skeleton View of Actuator Section. . . . . . . . . . . . . . . . . . .
29
30
2-8 Exploded View of Solenoid Section. . . . . . . . . . . . . . . . . . . 30
2-9 Aspect View of Completed Solenoid Section. . . . . . . . . . . . . .
2-10 Initial Vehicle Concept Design. . . . . . . . . . . . . . . . . . . . .
31
32
3-1
3-2
3-3
Von Mises Forces in Axial Force Configuration. . . . . . . . . . . .
Assembly Displacement in Axial Force Configuration. . . . . . . . .
Von Mises Forces in Transverse Force Configuration . . . . . . . . .
3-4 Assembly Displacement in Transverse Force Configuration. . . . . .
3-5 Recovery Simulation Results With Displacement Factor of 3:1. .
. .
3-6 Three Main Designs Considered For FLS Plate Support . . . . . . .
35
36
36
37
39
40
9
3-7 Flanged Design Showing Stress From Transverse Load. . . . . . . . . . . . . 41
3-8 Flanged Design Showing Displacement From Transverse Load. . . . . . . . . 41
3-9 Flanged Design Showing Stress From Axial Load. . . . . . . . . . . . . . . . 41
3-10 Flanged Design Showing Displacement From Axial Load. . . . . . . . . . . . 42
3-11 C-Channel Stringers Showing Stress From Transverse Load . . . . . . . . . . 43
3-12 C-Channel Stringers Showing Displacement From Transverse Load . . . . . . 44
3-13 C-Channel Stringers Showing Stress From Axial Load . . . . . . . . . . . . . 44
3-14 C-Channel Stringers Showing Displacement From Axial Load . . . . . . . . . 44
4-1 Experimental Data For Drag on Cylinder in Crossflow [4]. . . . . . . . . . .
52
4-2 Geometry (a), and Mesh (b) of COMSOL Crossflow Model . . . . . . . . . . 52
4-3 Velocity Data Heatmap from Crossflow Simulation. . . . . . . . . . . . . . . 54
4-4 Pressure Data Heatmap from Crossflow Simulation. . . . . . . . . . . . . . . 55
4-5 Simulated Drag Coefficient Data for Cylinder in Crossflow. . . . . . . . . . . 56
4-6 Geometry (a), Meshing (b), and Velocity (c) of Original REMUS Nose .
. .
58
4-7 Geometry (a), Meshing (b), and Velocity (c) of Angled Nose . . . . . . . . . 59
4-8 Heat Map of Pressure Data for Original REMUS Vehicle. . . . . . . . . . . . 61
4-9 Heat Map of Pressure Data for Angled Nose AUV. . . . . . . . . . . . . . .
61
4-10 Simulated Drag Coefficient Data for Angled Cylinder in Axial Flow. . . . . . 61
4-11 Simulated Lift Coefficient Data for Angled Cylinder in Axial Flow. . . . . . 62
4-12 Geometry (a), Meshing (b), and Velocity (c) of FLS Nose . . . . . . . . . . . 64
4-13 Heat Map of Pressure Data for FLS Nose. . . . . . . . . . . . . . . . . . . . 65
4-14 Simulated Drag Coefficient Data for FLS UUV in Axial Flow. . . . . . . . . 66
4-15 Simulated Lift Coefficient Data for FLS UUV in Axial Flow. . . . . . . . . . 66
4-16 Lift Coefficients Of Each Tested Model. . . . . . . . . . . . . . . . . . . . . . 68
4-17 Drag Coefficients Of Each Tested Model. . . . . . . . . . . . . . . . . . . . . 68
10
List of Tables
2.1 FLS Nose Physical Properties . . . . . . . . . . . . . .
2.2 Solenoid Section Physical Properties . . . . . . . . . .
2.3 Initial Design Physical Properties . . . . . . . . . . . .
3.1 Channel Assembly Before and After FEA Optimization
3.2 Properties of 3 Considered FEA Plate Designs . . . . .
3.3 Channel Assembly Before and After FEA Optimization
4.1
Unchanging Global Simulation Variables . . . . . . . . . . . . . . . . . . . .
49
4.2
Physical Properties of Cylinder Model For Crossflow . .
. .
. . . . . . . . .
53
4.3
4.4
Element Size Parameters for Cylinder in Crossflow . . . . . . . . . . . . . . .
53
Element Size Parameters for Original and Angled Noses .
. .
. . . . . . . . .
58
4.5
4.6
Lift and Drag Impacts of Angled Nose . . . . . . . . . . . . . . . . . . . . .
60
Lift and Drag Impacts of FLS Nose . . . . . . . . . . . . . . . . . . . . . . .
65
37
40
43
A.1
A.2
A.3
A.4
Data Collected During Crossflow Simulations . . . . . . . . .
Data Collected During Simulation of Original REMUS Nose
Data Collected During Simulation of Angled Nose . . . . . .
Data Collected During Simulation of FLS Nose . . . . . . .
23
28
31
72
72
73
73
11
THIS PAGE INTENTIONALLY LEFT BLANK
12
Chapter 1
Introduction
With increasing endurance and hardware capabilities, unmanned underwater vehicles (UUVs) are being used more commonly for hydrographic surveys, mine countermeasures, environmental monitoring, search and salvage monitoring, and harbor security operations worldwide
[7]. There are many diverse families of UUVs, and each of them specializes in different aspects of these missions.
The Remote Environmental Monitoring UnitS (REMUS) vehicle is a UUV heavily utilized in both commercial and military applications. The REMUS comes in a variety of models, each with different depth ratings and capabilities. While the largest REMUS vehicles are able to operate in depths up to 6,000 meters, the Navy most commonly uses REMUS vehicles best suited for littoral operations. The vehicle explored in this thesis has an maximum operational depth of 2500 meters and is aptly named the REMUS 2500. The REMUS 2500
UUV is 12 feet in length, 14 inches in diameter, and weighs approximately 700 pounds [6].
In order to increase the sensing capabilities of the REMUS 2500, a vehicle modification was proposed that would replace the existing small pencil beam sonar with a high-resolution forward looking sonar (FLS). Upon successful installation, the FLS upgrade would offer improvements in the REMUS 2500's obstacle detection, avoidance, and classification capa-
13
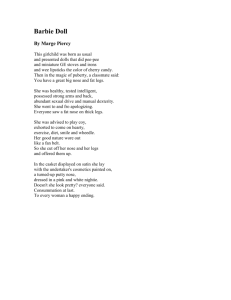
bilities. Developed by RESON, the SeaBat 7131 was chosen as the FLS. The RESON 7131 is approximately 8 inches tall, 12 inches wide, 8 inches deep and consists of two projector units and one large receiver. The TC 2183 Projector sits on top of the EM 7212 Receiver and is comprised of two semicircular lobes. The TC 205 Projector is a large semicircle and sits below the receiver as shown in figure 1-1 [8]. In order to optimize performance, the
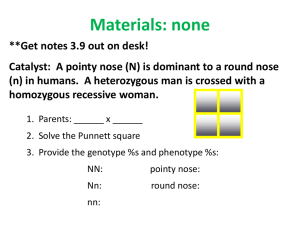
RESON manual prescribes that the FLS be mounted at a downward angle of 10 degrees relative to the horizontal plane. Figure 1-2 shows how large this angled FLS hardware is when compared to the existing nose of the REMUS 2500. The first challenge of this thesis was to attach the SeaBat 7131 to the REMUS 2500 frame securely without protruding from the cylindrical projection of the UUV bulkhead.
The next challenge of this thesis was to maintain the compatibility of the REMUS 2500
+-
TC 2183 ERAS Projector
EM 7217 Receiver iI@CO
8.04
TC 2052 Projector
11.97
Figure 1-1: Dimensions of RESON Seabat 7131 vehicle with the existing shipboard Launch and Recovery System (LARS). The LARS is a
14
Figure 1-2: RESON SeaBat 7131 (center) Compared to REMUS 2500 Nose (right) hydraulic lift that can be utilized in high seas to lower REMUS vehicles into the water and recover them again at the end of each mission. During deployment, the REMUS vehicle uses a solenoid-actuated hook located at its bow to hold a chain attached to the LARS deployment line. Once the vehicle is lowered into the water, the solenoid is remotely triggered and the chain is released, detaching the UUV from the LARS. Upon recovery, the REMUS releases a small buoyant piece of foam located on the top foremost section of its nose. As this foam floats away from the vehicle, it pays out a long rope that attaches to a recovery D-ring on the vehicle. Shipboard operators then use a harpoon gun or recovery hook to capture the floating foam and gather the rope on the ship. Once coupled with the winch on the LARS, the rope is taken in and the vehicle is lifted out of the water and brought to a safe resting position on the ship.
The addition of an FLS as large as the SeaBat 7131 introduces many challenges in preserving the appropriate position of the LARS interfacing hardware. Required to sit at the front-most part of the vehicle, the FLS forces the solenoid-actuated deployment hook, buoyant recovery foam, recovery rope, and recovery D-ring to move from their previous positions.
Furthermore, due to the unpredictable motion of the boat relative to the REMUS 2500 vehicle, the FLS nose structure must be designed to withstand forces exceeding the weight of the vehicle without sustaining damage during recovery.
15
The final design challenge in this research was to maintain the REMUS 2500's previous functional nose capabilities while adding the FLS hardware. Each REMUS vehicle nose contains solenoids which provide 3 specific mission capabilities. The first two aforementioned functions are the ability to release the deployment chain during LARS operations and release the buoy to enable rope recovery upon mission completion. The third requisite REMUS capability is the ability to release a drop weight to render the vehicle positively buoyant in the case of emergency. In addition to these solenoid functions, the REMUS nose is required to hold the vehicle's conductivity and temperature (CT) sensor. This device is the small black trapezoidal device seen on the port side of the vehicle in Figure 1-2. This sensor must always be positioned in such a way that fluid flows through it steadily as the vehicle moves through the water.
After completing the design challenges, this thesis analyzed the structural validity of the proposed FLS nose design. By using Finite Element Analysis (FEA) to predict how the design responded to launch and recovery forces, each load bearing member was optimized for strength and weight.
The final challenge of this thesis was to characterize the hydrodynamic impact of the
FLS nose on the REMUS vehicle. By introducing an angled plane onto the bow of the
UUV, there was an anticipated persistent increase in lift. By estimating the change in lift and drag coefficients using Computational Fluid Dynamics (CFD), operators can estimate the impact that the nose will have on vehicle performance and optimize stability controllers before putting the design in the water.
The body of this thesis is broken into 5 main chapters. Chapter 2 introduces the quantified design constraints and goals of the FLS integration design project. This chapter specifically consists of the hardware specifications, material selection, safety regulations, and compatibility objectives of the final nose design. A great deal of the design process was done on paper with several integration methods considered but ultimately not pursued. Three
16
main designs were initially realized using SolidWorks 2014 computer aided design (CAD) software, but only one was selected to be completed in detail and ultimately manufactured.
It is this final design alone that is displayed and evaluated in this thesis as the ultimate solution to the design challenge.
Chapter 3 follows the process of reducing the weight and simplifying manufacturing complexity of the design introduced in Chapter 2. Using the finite element analysis tool in
SolidWorks 2014, each key structural element was tested with the maximum load anticipated during LARS operations. Data from simulation results drove several design modifications, each of which is documented in detail therein.
Chapter 4 presents the results of CFD simulation of cylindrical UUVs in axial flow.
COMSOL Multiphysics was first used to compare the lift and drag coefficients of the original REMUS 2500 nose against those induced by the addition of the FLS nose discussed in
Chapter 3. After analyzing and interpreting this data, the chapter continues by introducing a new nose with a blunt face angled downwards 10 degrees. By comparing the lift and drag of an original REMUS nose to this generic angled face, benchmark data is established for future projects integrating angled FLS devices onto REMUS-like vehicles.
Finally, Chapter 5 summarizes the work of the thesis and offers a path for suggested recommendations for future research efforts.
In the Fall of 2014, the design discussed in Chapters 2 and 3 was delivered for final review and manufacturing along with structural and hydrodynamic simulation results from
Chapters 3 and 4. At the time of this publication, the modified REMUS 2500 FLS nose is scheduled to begin water testing by Summer 2015.
17
I
THIS PAGE INTENTIONALLY LEFT BLANK
18
Chapter 2
FLS Integration and Design
2.1 Design Specifications
Prior to conceptualizing and designing the FLS nose for the REMUS 2500, there were a number of meetings with vehicle designers, operators, and manufacturers to establish requirements for the subsystem. The first established functional requirement was to mount the RESON SeaBat 7131 FLS at the forward most part of the vehicle at a 100 downward angle. The nose was required to fit within the projected cylindrical hull of the REMUS 2500 vehicle and contain all hardware necessary to interface with the shipboard LARS device.
To facilitate deployment, the nose needed to contain a solenoid-actuated hook that could support the weight of the vehicle, allow the vehicle to hang in static equilibrium, and release the chain once in the water. For recovery, the nose needed to hold approximately 30 feet of 1/2 inch nylon rope, deploy a positively buoyant recovery buoy, and provide a D-Ring which could support the weight of the vehicle and allow the vehicle to pull vertically into the
LARS device. The design also was required to drop a weight in case of emergency to rapidly achieve positive buoyancy. In order to confirm the status of each solenoid function, each assembly was to be outfitted with a proximity sensor. The 'Functional Design Constraints'
19
Functional Design Constraints
SeaBat 7131 FLS must be fixed to REMUS 2500 frame at 10' downward angle
Structural hardware must to interface with shipboard LARS
Solenoid must release chain after LARS deployment
Solenoid must release ascent weight in case of emergency
Solenoid must release buoyant foam with line for LARS recovery
Each solenoid assembly must contain one ferromagnetic proximity sensor to confirm action
Structural Design Constraints
Nose structure must safely transfer 1,225 pounds of axial force to vehicle frame
Nose structure must safely transfer 525 pounds of transverse force to vehicle frame
Overall FLS nose must maintain positive buoyancy at least 10% of total weight itemized list summarizes the specifications for this thesis design project.
Several design specifications guided the structural requirements of the project to ensure that the FLS nose design was both functional and robust. Each load-bearing member was designed to allow for the impulse associated with varying unpredictable sea states during both deployment and recovery. The safety factors associated with LARS operation dictated that the frame safely bear 1.75 times the gravitational force of the vehicle in the axial direction and 0.75 times the gravitational force directed orthogonally to the vehicle axis without incurring damage. For this project, the mass of the REMUS 2500 was assumed to be 700 lbm [6], establishing the forces with safety factors to be 1,225 lbf of axial and 525 lbf of transverse force. The final structural requirement of the project was to maintain positive net buoyancy equal to 10% of the overall weight of the new nose. The 'Structural Design
Constraints' list above summarizes the requirements and goals for this thesis project.
2.2 FLS Nose Design
Prior to FLS integration, the REMUS 2500 vehicle held the LARS interfacing hardware, recovery rope, recovery buoy, and solenoids in a compact and hydrodynamic nose. This nose
20
was fixed onto the wet payload module of the REMUS vehicle, a section with four structural stringers designed to hold modular mission hardware. Given the size and orientation of the
SeaBat 7131, the new nose design was broken into two parts. While the forward-most section was designed to hold the FLS and CT sensors, the aft section utilized the structural concept of the wet payload module to hold each of three required solenoid assemblies. From this point on, the forward most part of the sub-assembly will be referred to as the 'FLS Nose' and the aft part will be referred to as the 'solenoid section.' By designing a stand-alone section of the vehicle capable of performing the three functions of the standard REMUS nose, this thesis hopes to provide hardware for future hardware integration projects. In the future, adding new hardware will only require modification of the forward FLS nose section.
In order to hold a chain for deployment and provide a pick point for vehicle recovery, the
FLS nose section needed to structurally link the LARS interfacing points to the vehicle frame and provide access to solenoid assemblies. After several deployment hardware concepts were considered, a box-beam channel was selected to guide the deployment channel between the
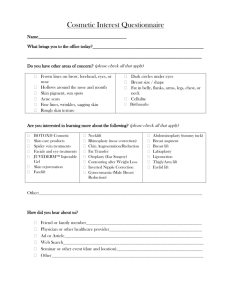
RESON receiver and semicircular TC2182 projector. Figure 2-1 shows the structural design of the FLS nose including both projectors, the receiver, and the angled titanium channel.
After the angled channel was designed, a D-Ring was attached to the front using clevis pins.
This D-ring was designed to feed the recovery rope around the FLS nose section to the solenoid section when sitting flush with the front plane of the vehicle.
The last part of the FLS nose design was to incorporate syntactic foam components to provide buoyancy, protection, and fairing for the nose. A channel was carved into the foam to guide the line around the port side of the FLS nose in order to guide the recovery line from the D-Ring to the recovery buoy. The starboard foam was utilized to hold the CT sensor at an angle to ensure steady fluid flow throughout each mission. Once each structural and spacial requirement was met, the syntactic foam was fit around each element to maximize buoyancy, allow for convenient attachment and removal, and allow cables to pass through to
21
10
0
FL S Plate
I
F
Angled Ch aIG®R
Recovery D-Rm~
~lOB
9.60
0
0
0
Figure 2-1: FLS Supported on Frame With Angled Channel
22
Figure 2-2: Exploded View of FLS Nose.
Length
Final Weight
9.60 in
51.89 lbf
Final Buoyancy -8 lbf
Table 2.1: FLS Nose Physical Properties aft sections of the vehicle.
The final exploded view of the forward nose section design is shown in Figure 2-2 and
Figure 2-3 shows aspect views of the nose. With stainless steel screws, Ti 6A1-4V titanium, and syntactic deep sea foam, this front section had a final mass of 51.89 lbm and a net buoyancy of approximately -8 lbf. Considering the compact nature of this section, this negative buoyancy was deemed acceptable and accounted for in the solenoid section.
23
............ .. .... ..
L77~
CT Seniso
Syntactic Foam >
Figure 2-3: Aspect Views of FLS Nose.
24
TC 2183 ERAS Projector
E M 7217 Receiver
TC 2052 Projector
0 0
2.3 Solenoid Actuation Section Design
Given the original size of the REMUS 2500 wet payload section, the solenoid assemblies had ample design space available to perform their respective functions. Given this freedom, each assembly was placed in such a way to reduce force in the direction of each solenoid plunger encountered during missions.
In order to hold the deployment chain and emergency ascent weight, orthogonal rotating members were designed to divert required retention force directly into the vehicle frame perpendicular to each solenoid plunger. When activated, these two solenoids rotated their respective levers allowing assembly elements to release the deployment line and emergency ascent weight. Figure 2-4 shows the first solenoid releasing the deployment chain and Figure
2-5 shows the second solenoid releasing the ascent weight using the aforementioned assemblies. These assemblies are very similar to the robust assemblies found in the standard
REMUS 2500 nose, however an angled bar was added to the ascent weight retaining hook.
This angle allows the stem of the weight to push the bar into place to simplify the loading process.
The final solenoid was responsible for deploying a buoy at the end of each mission. On the original REMUS 2500, this buoy sat directly above the line-retaining D-ring at the nose of the vehicle. After several buoy locations were considered, it was determined that the buoy would deploy most reliably if placed below the waterline on the port side of the vehicle. By holding the buoy in place with the linear sliding bolt lock mechanism shown in Figure 2-6, actuation of the solenoid was designed to release the buoy and allow it to float away from the vehicle driven by the upward force of its own buoyancy. This buoy was designed to sit in large positive sloping cavity to facilitate easy release when experiencing upward buoyant force. Figure 2-7 shows the relative location of the solenoid assemblies to one another within the solenoid section.
25
1) Resting Position of Chain Release Assembly
2) Solenoid Ro tates Catch Lever
3) Spring (Not Pictured) Forces Forw ard Lever to Rotate and Release Chain
Figure 2-4: Steps to Deploy LARS Chain Via Solenoid Assembly
26
1) Resting Position of Drop Weight Solenoid Assembly
2) Rotating Catch Released by Solenoid
3) Spring (Not Pictured) Rotates Lever and Releases Weight
Figure 2-5: Steps to Release Emergency Ascent Weight Via Solenoid Assembly
27
Length
Final Weight
16.38 in
46.78 lbf
Final Buoyancy +9.68 lbf
Table 2.2: Solenoid Section Physical Properties
Once the spatial orientation of each solenoid assembly was fixed, the foam shell was designed. In order to maximize buoyancy, the syntactic foam parts were designed to fill as much of the solenoid section as possible while maintaining vehicle functionality. The foam exterior was then modified to maintaining access to each assembly, provide a channel to guide the recovery rope from the FLS nose to the rope tray, and hold the recovery buoy during each mission. Once the foam fairing was designed, the solenoid section was lengthened until the buoyancy of syntactic foam overcame negative buoyancy of the structural titanium and the residual negative buoyancy of the FLS nose. Once the final length of the solenoid section was determined, through holes and inserts were incorporated into each piece of fairing to secure it to the vehicle frame. Shown in Figures 2-8 and 2-9, the final solenoid section had a mass of 46.78 lbm and had 9.68 lbf of positive buoyancy.
28
1) Resting Position of Recovery Float Assembly
2) Solenoid Pulls Linear Slider From Buoy Retaining Rings
3) Buoyancy Lifts Buoy From Vehicle. Rope Attached to
Eye Hook (Not Pictured) Pays Out From Vehicle
Figure 2-6: Steps to Release LARS Recovery Buoy Via Solenoid Assembly
29
Im 7
Figure 2-7: Skeleton View of Actuator Section.
Figure 2-8: Exploded View of Solenoid Section.
30
0
*
0
6 o
*
-1
6.38
0
0
Figure 2-9: Aspect View of Completed Solenoid Section.
2.4 Initial Design Review
As a complete package, the proposed FLS nose and solenoid section added 26" and 98.67 lbm to the REMUS 2500 vehicle. With a positive net buoyancy of 1.68 lbf, this design maintained
1.7% positive buoyancy and was structurally capable of interfacing with the shipboard LARS while maintaining each of the 3 standard solenoid functions. The design shown in Figure
2-10 and with properties detailed in Table 2.3 was presented for review in the summer of
2014 and is scheduled to begin testing in the summer of 2015.
Length
Final Weight
Final Buoyancy
25.85 in
98.67 lbf
+1.68 lbf
Table 2.3: Initial Design Physical Properties
31
0
24.15
Figure 2-10: Initial Vehicle Concept Design.
0
32
Chapter 3
Structural Analysis
3.1 Goals of FEA Simulation
Once the design fulfilled the functional and structural goals of the FLS integration project, the hardware was further optimized for strength and buoyancy. Having constructed the
CAD in SolidWorks 2014, the Solidworks finite element analysis package was used to import structural assemblies and test how they reacted to anticipated LARS forces. Specifically, the angled box beam, FLS support plate, and structural stringers were tested with various shapes, thicknesses, and structural reinforcements to improve their weight-to-strength ratio.
The details of this process are outlined in this chapter.
Finite Element Analysis (FEA) is a computational method of breaking down real world problems into simple geometric representations and solving them in simulated multiphysics environments. The FEA analysis sought to optimize the structural integrity of the design presented in Chapter 2 by simulating the forces anticipated during vehicle launch and recover and strengthening the design accordingly based on these results. To prepare models for FEA simulation, models are broken down into a finite number of faces and edges that
33
together create a mesh representation of the desired geometry. After specifying the origin and magnitude of the input conditions, propagation of disturbances in the system are calculated as they spread through this mesh one element at a time. Preparing a model for
FEA simulation requires balance between the accuracy of each simulation and the available time and computation power. In order to achieve these goals, the static simulation suite of
SolidWorks 2014 was chosen as the simulation environment for this thesis.
3.2 Optimizing the Channel
The channel running between the FLS projector and receiver is the first load bearing member that interfaces with the LARS during deployment and recovery. In order to test the channel assembly in its weakest configuration, the simulations tested the recovery configuration with the hook fully extended (orthogonal to the front plane of the vehicle). After importing each individual part and defining spatial relationships between them in a SolidWorks assembly, the material properties of the D-ring and channel were altered to reflect the grade of titanium used in previous REMUS vehicles (Ti 6A1-4V). After attaching the D-ring to the channel using the virtual pin tool and defining the aft end of the channel as a fixed plane, the geometry was meshed using the SolidWorks standard meshing settings.
During the first stages of recovery, force is localized at the end of the D-ring and acts orthogonally to the central axis of the vehicle as the rope lifts the vehicle out of the water.
During the second phase of recovery, the vehicle hangs vertically and the full force of the vehicle is directed through the hook parallel to the central axis of the vehicle. To begin testing, one assembly was created to connect the channel to the hook with virtual pins and fix the aft end of the channel in space. In order to test the two stages of recovery, simulated force was localized at the end of the hook, but changed in magnitude and direction.
34
von Mises Stress (psi)
39( +OO5
23+00'.
1426'005
1Ma=
2.236e+005
6 346rW04
5307e+004
38069,+004
S210,
00 1
-s-Yield Strength I .523e+005;
Figure 3-1: Von Mises Forces in Axial Force Configuration.
After consulting with vehicle engineers and operators, the planned simulated forces were increased from the original safety factors to ensure confidence the performance of the structural frame. First, 5000 lbf was applied in the axial direction. Figure 3-1 shows the von
Mises stress experienced by the channel assembly, and Figure 3-2 shows the simulated displacement. When viewed in profile, it was clear that the channel would not deform in a way that would harm the FLS receiver or projector while hanging vertically. The stress analysis, however indicated that several points on the D-ring exceeded the yield strength of titanium (1.523e5 psi) [1]. This immediately identified the D-ring as a part which needed to be redesigned to withstand the stresses of recovery. Using the SolidWorks pin and bolt adviser tool, it was found that the simulated shear force, axial force, bending moment, and torque values were within the bounds of safe operation for all tested configurations.
Next, a force of 1,000 lbf was applied to the hook in the transverse direction (a safety factor of 1.42). Figure 3-3 shows the von Mises stress experienced by the channel assembly and Figure 3-4 shows the anticipated displacement. Similar to the axial simulation, it appeared that while deformation of the channel would not damage the FLS, certain parts of the recovery D-Ring exceeded acceptable level of von Mises stress.
Identifying the D-ring as the weakest member of the channel assembly, its design and
35
1
Max17.910 e- 0: 2fl4
Displacement (in)
17
910C-002
7 251,-002
6 592e-002
5 932e-002
5 2|37-.-2
614c-O332
3 955e-002
3 296e-002
2637e-O2
I 977e-3O2
I 311e-003
6 592t-003
3.937c-O32
Figure 3-2: Assembly Displacement in Axial Force Configuration.
von Mises Stiess qi)
I1
3t4+(0i
-f - -= -3 -22 e4-05 7 615H-+"4 -* Y eld tre gth1 5 23e+005
6 346e+03-4
5O7C8e+f04
2
5338.+jj4
3Mat|3.227e+005|
-+.Yield Strength I .523e+005
Figure 3-3: Von Mises Forces in Transverse Force Configuration.
thickness were incrementally modified until the maximum von Mises stresses in the FEA simulation were below 1.523e5 psi threshold. After modifying the filet radii and thickness of the central vertical support in the D-ring, the improved results in table 3.1 were obtained with minimal increase in mass.
36
(~Q
Ma: |1.890e-OO1|
X
I"4
Displacement (i)
I.890e-OO1
1 732e-001
I ,75e-001
.1,417c-001
I 260e-001
1.102e-00 1
9 450c-002
7 875t-002
6 300e-002
4
7
25e-002
3 150e-002
3 937e-032
Figure 3-4: Assembly Displacement in Transverse Force Configuration.
Vertical Member Thickness
Fillet Radius
Max Stress
Max Displacement
Assembly Mass
Before D-Ring Modification After D-Ring Modification
0.25 in 0.3 in
0.02 in
3.227e5 psi
0.189 in
2.3621 lbm
0.2 in
1.472e5 psi
0.167 in
2.3690 lbm
Table 3.1: Channel Assembly Before and After FEA Optimization
37
3.3 Optimizing the FLS Plate
The next load bearing structure imported into the FEA environment was the plate responsible for supporting the FLS and transferring stress from the channel to the aft stringers.
During the application of both transverse and axial force, the angled channel transfers a large bending moment to the plate in addition to the pure directional force. Weakened by the through-holes for cable passage, the plate is structurally weak against moments and vulnerable to deformation. Figure 3-5 shows the nature in which the plate is prone to deform during LARS operations exaggerating the results with a 3:1 displacement scale.
By modifying the plate design and importing into the FEA environment, several designs were considered to counteract this bending moment. Figure 3-6 shows each of these designs for reference. The first design shown in Figure 3-6(a) utilized an attachment that bolted to the plate and transferred the moment to the stringers using thin beams. After many attempts at modifications and simulation, this design was dismissed. In addition to the fact that the extra hardware was heavy and consumed a large amount of space in the solenoid section, it added unnecessary manufacturing complexity and steps in vehicle assembly. For these reasons, the next two designs aimed to reinforce the plate and absorb the moment locally without relying on removable hardware to transfer the moment to the structural stringers.
The next design shown in Figure 3-6(b) simply increased the thickness of the FLS plate until the deformation and stress of the LARS FEA simulations were acceptable. The design study process used plate thickness as an independent variable. By identifying the maximum displacement of the channel and maximum von Mises stress as the design constraints, several simulations were run while increasing the value of the plate thickness until the constraints were satisfied. After running the design study, SolidWorks determined that the plate would have to be 0.2 inches thick to limit the channel displacement to 0.32 inches (the distance
38
FLSPhate
Recoveivl
D
-Rii Antled Channel
Figure 3-5: Recovery Simulation Results With Displacement Factor of 3:1. between the channel and sonar receiver) and the von Mises stress below 1.523e5 psi. While the thick plate met all design requirements, investigation continued to reduce the weight by making non load-bearing sections of the plate thinner.
The final design shown in Figure 3-6(c) utilized orthogonal flanges to reinforce the FLS plate. By adding welded extrusions, the stress from the channel moment was transferred to the stringers without adding thickness to the non load-bearing areas of the plate. In order to optimize both the plate thickness and stringer dimensions, a second design study was prepared using SolidWorks. Using the same design constraints, this time the independent variables were identified as the plate thickness, flange thickness, and flange width. This study delivered an FLS plate with a thickness of 0.0950 inches and flanges 0.3750 inches wide and 0.25 inches thick.
The results of the aforementioned simulations showed the reinforced plate to have the best strength to weight ratio of all three designs. Table 3.2 shows the data gathered for the material properties of each design shown in Figure 3-6. The final stress and displacement
39
Plate Thickness
Total Material Volume
Assembly Mass
Support Unit Thick Plate Orthogonal Flanges
0.15 in
21.403 in 3
0.2 in
20.2391 in 3
0.0950 in
10.7984 in 3
3.4245 lbm 3.2383 lbm 1.7277 lbm
Table 3.2: Properties of 3 Considered FEA Plate Designs
Figure 3-6: Three Main Designs Considered For FLS Plate Support simulation results for the orthogonal flanged plate design are shown in Figures 3-7 through
3-10.
40
.74: +.741e+03 3370c+004 von
I6
741e+0
6 179e+004
5 617e+004
S056e+004
4 494e+004
3 932e+004
2
809e+004
2 247e+"04
I 685C+O4
I 123r+"04
5 617e+003
0 000+000
Figure 3-7: Flanged Design Showing Stress From Transverse Load.
1Max: 7.37e 1
Displacement(in)
7 74-001
6 760C-001
6 145t-001
5 53ke-001
4 916-O1
43028e-001
3687e-001
3,073e-001
2
45e-001
1 344v-001
6
145e-02
3937e-032
Figure 3-8: Flanged Design Showing Displacement From Transverse Load.
Max________ _ von Mises Stress (psi)
7 458e+004
16 ?36e+004
6
215e+004
5
593t4004
4 972H+004
4 350e+004
3
729e+004
3,107.+004
2
496e+04
864e+004
6 215e+03
0.00e+000
Figure 3-9: Flanged Design Showing Stress From Axial Load.
41
Displacement(in)
2 175e-001 i1 994e-00
1
.
.63k.-1i1
1.092e-001
7 269e-002
5 437e-002
3 625e-002
I 242e-002
3 937e-032
Figure 3-10: Flanged Design Showing Displacement From Axial Load.
3.4 Optimizing the Stringers
During the design process, the stringers connecting the FLS plate to aft REMUS interfacing hardware were modeled after those found on the REMUS 600 wet payload section. Modified from the original aluminum T-beams to titanium angle irons for ease of manufacturing, each member started with the original thickness of 0.125 inch. Due to the angled channel and large resulting moments during LARS operations, simulations showed that a majority of von
Mises stresses were located in either the two top or bottom stringers alone depending on the direction of force. Considering the mass and thickness of each stringer, new configurations were designed to better distribute the load through the aft solenoid section and through the entire stringer structure. Review of literature suggested that a C-Channel would provide the best structural integrity given the geometric constrainsts of the solenoid section. After deciding to connect the top and bottom stringers, several configurations were tested to optimize vehicle buoyancy and usability. The design that finally achieved the greatest strength to weight ratio was confirmed to be the symmetric C-Channel design.
By running a design study that modified the thickness of these channel walls, FEA simulation showed that the titanium could safely be reduced to a thickness of 0.0780 inches.
Table 3.3 summarizes the improvement of these C-Channel stringers over the original angle
42
Stringer Thickness
Combined Mass
Total Volume
Angle Iron Stringers C-Chanel Stringers
0.1250 in 0.0780 in
3.1500 lbm
19.69 in
2.9578 lbm
18.4865 in
3
Table 3.3: Channel Assembly Before and A ft er FEA Optimization
von Mises Stress (psi)
3667e+004
3 333e+004
3 000e+004
2 667e+004
2 333e+004
2 000e+004
1
667e+004
I 333c+004
Ma 6.014e+004
67+3
3 333e+00O3
0 00Oe+000
Figure 3-11: C-Channel Stringers Showing Stress From Transverse Load iron stringers. Figures 3-11 and 3-12 show that the stress is well distributed throughout the C-Channel allowing it to avoid deformation while experiencing 1,000 lbf of transverse force. FEA simulation also confirmed that the new C-Channel configuration withstood the axial force of recovery without exceeding stress or displacement parameters as can be seen in Figures 3-13 and 3-14. This final design reduced the mass of the vehicle by 0.1922 lbm while meeiting stress and displacement performance requirements under launch and recovery loads.
43
Displacement(in)
4
2
3 7
4 622e001
I e-001
3
3467e-001
3 08lie-001
2 696C-001
231e-001
1 926e-001
1 54le-001
1 156e001
Max 14.622e-0011774
3 852e-002
3 937e-032
Figure 3-12: C-Channel Stringers Showing Displacement From Transverse Load
004 von Mises Stress (p.i)
4 000e+004
13667e+0014
3
333e+004
3 000c+004
2
667e+O(4
2 333e+004
2 000e+004
1667e+004
1 000~e+004
6
6
6 7 e+
0
3
3 3
3
3,+003
0 00(e+0
Figure 3-13: C-Channel Stringers Showing Stress From Axial Load
Displacement(in)
1
900e-001
7
I
42e-
00
1
1 583e-001
1
425e.001
1267e
-00
1
1 10e-001
9 5ole-002
7 917e-002
6 334e-002
4 750e.002
Max I01.9003-001116e-002
1
523e-032
3 937e-032
Figure 3-14: C-Channel Stringers Showing Displacement From Axial Load
44
3.5 FEA Results and Implications
Through finite element analysis, the load-bearing elements of the FLS nose were reduced in weight by 1.896 ibm while improving or maintaining their original structural strength.
These changes required several modifications to the rest of the design presented in Chapter
2. Changes included modifying the nose to hold the modified D-Ring flush to the vehicle's front plane during missions, rearranging the solenoids to make room for the orthogonal flanges on the FLS plate, fitting foam to the new stringer frame, and attaching the solenoid assemblies to new stringer configuration. After making these changes, the final design was submitted for review and manufacturing in the summer of 2014.
45
THIS PAGE INTENTIONALLY LEFT BLANK
46
Chapter 4
Characterizing Hydrodynamic
Coefficients
4.1 Fluid Simulation Goals
After designing and optimizing hardware to house the FLS in Chapters 2 and 3, the next goal of this thesis was to predict hydrodynamic impact of the new appendage on the REMUS
2500. This process included selecting an environment in which to frame the Computational
Fluid Dynamics (CFD) calculation, verifying methodology by comparing CFD results to real-world data, and then importing and testing original vehicle models. By introducing an angled face to the front of the REMUS 2500, there was an anticipated change in the lift and drag coefficients of the vehicle. With quantified coefficients, vehicle operators will be able to estimate the impact that the nose will have on power consumption, vehicle stability, and vehicle control. While SolidWorks has a toolbox for fluid simulation, COMSOL was chosen as the Multiphysics CFD environment for the following tests.
COMSOL Multiphysics is a computational tool that has a diverse pallet of FEA environments to simulate fluid flow, heat transfer, and electric conductivity. The CFD module
47
allows for customization of meshing and geometry parameters as in a normal FEA environment, but also allows for unique fluid properties, fluid phases, and turbulence models.
The first step in the CFD analysis of the new angled nose design was simulating the drag coefficient of a well studied object to confirm the validity of the methodology. An initial literature search returned very few data rich studies on cylinders experiencing axial flow.
Expanding the search to similar shapes and control volumes, many studies provided data for cylinders in crossflow. Data gathered from tow tank experiments of cylindrical objects in flow normal to the central axis was used so calibrate the settings and parameters of COM-
SOL methodology [4]. Successful replication of this real world data would validate and lend confidence to the procedure as new unique models were tested.
After validating the COMSOL CFD methods, the next step was to quantify the impact of the angled nose on the REMUS vehicle. Replacing only the very front of the REMUS model, an angled plane was tested in identical conditions to characterize the difference in their drag and lift coefficients. The simple plane served to approximate impact of mounting a large-faced FLS at a 10 degree downward angle onto underwater vehicles.
Finally, a simplified model of the the FLS nose described in chapters 2 and 3 was attached to the REMUS model and imported into COMSOL. By characterizing the difference in hy- drodynamic coefficients between the FLS nose and the original REMUS nose, the thesis will deliver a proposed design, its structural analysis, and coefficients to allow for an estimation of the impact it will have on vehicle dynamic stability and control.
4.2 COMSOL Parameters
In order to simulate the REMUS 2500 vehicle operating with the newly designed FLS nose, all CFD simulations were carried out in the single phase flow (spf) k 6 environment. The
48
COMSOL Variable Name Associated Property p
T
A
I/
K
E
Fluid Density
Fluid Temperature
Dynamic Viscosity
Kinematic Viscosity
Turbulent Kinetic Energy
Turblent Dissipation
Value
9.35 x 10-5
293.15
Units
'l7//73
K
5.65 x 10-5 "m/7
1.57 x 10--3 in
5,000
5, 000 lbf lbf
Table 4.1: Unchanging Global Simulation Variables single phase flow environment is best suited for objects traveling through a medium without producing enough pressure to change the phase of the water. Both k and E are coefficients which specify the turbulent kinetic energy and turbulent dissipation of the medium respectively. Controlling the energy and the scale of the turbulence, these were initialized with the standard values for seawater seen in Table 4.1.
After selecting the simulation environment, geometry was constructed for each study.
SolidWorks designs were imported into COMSOL and simulation environments were constructed around them. Rectangular prisms served as control volumes with faces set to offer slip boundaries, input conditions, and output parameters to represent the open ocean [2].
Finally the material property of the prism was set to water, detailed properties of which are featured in Table 4.1 [3]. Each set of simulations used a slightly different geometric configurations, each of which is described in detail in the following subsections.
4.3 COMSOL Calculations
The drag and lift coefficients of a submerged body do not stay constant in all operating conditions. On the contrary, both variables are often plotted against the Reynolds number so that changes in an object's size and velocity, as well as the density of the surrounding medium are accounted for. As both the medium and vehicle dimensions stayed constant throughout each study, vehicle speed became the input variable on which lift and drag co-
49
efficients depended. In this subsection, the method used in this research for calculating the drag and lift coefficients will be explained.
In ideal conditions, the REMUS vehicle operates at a maximum speed of six knots [6].
For this thesis, input velocities were generated from one tenth of a knot to ten knots to obtain a full picture of hydrodynamic coefficients for similar vehicles operating near these speeds. Utilizing the water density, p, vehicle speed, U, characteristic length of the cylinder,
1 c, and dynamic viscosity of water, /t, Equation 4.1 was used to calculated the Reynolds number. The independent variable for CFD simulations was calculated by increasing the vehicle velocity from one tenth of a knot to ten knots and calculating the Reynolds number at discrete intervals.
Re prU*1C (4.1)
In order to calculate the force of drag due to pressure on the vehicle, pressure data was collected and multiplied by the area over which it acted. By changing the normal direction of internal variables, both lift and drag due to pressure could be calculated using similar equations. By using the force of the pressure drag, FD, water density, p, vehicle velocity,
U, and planform area of the cylinder, A, Equation 4.2 returns the drag coefficient for any object [5]. This equation may be used for both lift and drag as long as the pressure force,
FD, is calculated using unit vectors in the appropriate direction.
2 * FD 2 * re'cf u
CD-Ps = 0*U2V
-D s p* U2: spf.rho in* Aianform
4-2)
While Equation 4.2 accounts for the pressure drag of an object, there also exists a drag force induced by friction between the skin of a submerged object and the thin boundary layer of fluid that passes over it. Regardless of the shape of an object, the total wetted surface
50
area is the dominant factor in drag value. The standard method for approximating the total friction force is to assume that the total surface area of the object has the same frictional drag as a flat plate of similar size. With the low operating speed of the REMUS vehicle, flow was assumed to be laminar and Equation 4.3 was utilized [5]. Once obtaining the drag coefficient relating to the skin friction of the vehicle, the water density, p, vehicle velocity,
U, and wetted surface area, A, were used in Equation 4.4 to find the resultant body force generated from skin friction alone. By including the force of both pressure drag and skin drag in the force variable FD, Equation 4.2 was finally used to find the drag coefficient of each study. As friction drag directly opposes vehicle movement, the lift coefficient was calculated from pressure alone without the inclusion of flat plate friction drag approximations.
(4.3) CF =1.328
FD-Fric =
1
* p *
U 2
* CF *
AWetted (4.4)
4.4 Reproducing Crossflow Data
In order to prove that geometry configuration, mesh generation, and fluid dynamic simulation, the first CFD goal was to model a cylinder experiencing crossflow. By reproducing real data through COMSOL CFD simulation, the process would be validated for future modeling of untested geometry.
4.4.1 Simulation Geometry, Meshing, and Initialization
In order to test a cylinder in crossflow, a cylinder was created in solidworks and imported into COMSOL. The control volume was then defined by a rectangular prism. The cylinder was fourteen inches in diameter and forty two inches in length, both the top and bottom
51
I
(a) d000
c?~ N'j.7)
oo,
Ioo
-
"'K!
-. -. -
-
~- -
................................. h.........*........I~.......... 10
-
I
10.I
___
I 46
____
________
I a
6 ~
~
.-
~maJ.3hi~zt.~
-
111
~tE22:
10 1
RdA
Figure 4-1: Experimental Data For Drag on Cylinder in Crossflow
[4].
Figure 4-2: Geometry (a), and Mesh (b) of COMSOL Crossfiow Model touching the walls of the prism. Removing the ends of the cylinder and assigning the appropriate input and output conditions for the control volume, the geometry was prepared for meshing. Figure 4-2(a) shows the geometry of the crossflow cylinder before meshing and
Table 4.2 contains more information about the imported cylinder model.
A critical aspect of this simulation was finding a balance between mesh resolution and computation time. After several trials, slight modifications to the 'normal' mesh properties for fluid dynamics, shown in Table 4.3, were used for simulation. Since this mesh configuration reproduced results similar to the data in Figure 4-1, it was maintained for the remainder of the crossflow tests. Figure 4-2(b) shows the simulation geometry after meshing and pre-
52
Parameter
Model Length
Value
42.00
Units in
Model Diameter 14.00 in
Wetted Surface Area 1,874.26 in 2
Table 4.2: Physical Properties of Cylinder Model For Crossflow
Parameter
Maximum Element Size
Minimum Element Size 0.0275 m
Maximum Element Growth Rate 1.15 n/a
Resolution of Curvature
Resolution of Narrow Regions
Value Units
0.0923 m
0.6
0.7 n/a n/a
Table 4.3: Element Size Parameters for Cylinder in Crossflow pared for simulation and Table 4.3 details the mesh settings used for this set of simulations.
Finally, the input conditions were calculated to provide the appropriate range of
Reynolds numbers for the data plot. As a cylinder with a central axis orthogonal to flow, the diameter was the characteristic length on which Reynolds number depended. In order to replicate the validated drag coefficients from Figure 4-1, the experimental Reynolds number ranged from 10-1 to 106. Using the fluid properties in Table 4.1 and the length of the vehicle, D, defined in table 4.2, Equations 4.5 and 4.6 were used to calculate the minimum and maximum inlet velocity parameters for the series of simulations. In order to gather adequate data to fit a curve, 22 velocities were tested, spaced evenly between these input values.
Umin
-
Re * p
_
0.1 * 5.65x10-5 p * D 3.61x10-
2
* 14
Umx = m
-
Re * [t 106 * 5.65x10-
== p * D 3.61x102
* 14
5
111.791n"/sec
(45)
(4.6)
53
V 1.5408
X elocity (in/sec)
60 80 20 40 100 120 140
Figure 4-3: Velocity Data Heatmap from Crossflow Simulation.
A 144.11
4.4.2 Results
The generalized minimal residual method (GMRES) was used to perform this CFD analysis.
This iterative solving method breaks the mesh into several geometric multigrid levels, each having a different coarsening factor. Simplifying the mesh into course representations and iterating from most course to the original model, the solver converged in just under forty minutes to return a solution to the simulation. After saving simulation data, COMSOL offered a versatile toolbox with which to plot, analyze, and export data. Figure 4-3 shows a heat map of velocity data to visualize flow around the cylinder, and Figure 4-4 shows the pressure heat map that was then used for calculating drag. Table A.1, shown in the appendix, shows the input parameters and drag coefficient values for the simulations performed on the cylinder in crossflow.
After finishing each simulation, the pressure data was exported from COMSOL into an
Excel spreadsheet where friction drag was taken into account and the final drag coefficients
54
i I A V -0.9533 I I i
-0.9533 -0.8187 -0.7034 -0.588 -0.4727 -0.3573 -0.242 -0.1266 -0.0113 0.1041 0.2194 0.3348 0.4501 0.5655
Figure 4-4: Pressure Data Heatmap from Crossflow Simulation.
were calculated using Equation ??. Finally, plotting drag coefficient as a variable dependent on the Reynolds number, comparisons were made between the experimental data from [5] shown in Figure 4-1 and the simulation data gathered, shown in Figure 4-5. In order to find a line of best fit, MATLAB was used to analyze the data and provide a 3rd degree polynomial fit as shown in Equation 4.7. While CFD data provides for drag and lift data for several discrete Reynolds numbers, this equation allows for interpolation between data points. These results show that the parameters established for this simulation, specifically for the mesh element sizing, gives results that accurately mimic experimental data. As subsequent fluid simulations were configured for the angled nose and simplified FLS model, the mesh and solver parameters derived in this section were used as the minimum levels of detail necessary to obtain accurate data.
(47)
CD
-e 0.019*log(Re) 3
+0.0658*log(Re)
2
-0.7923*log(Re)+3.0154
55
103
...
...........
...
.......
Drag Coefficient of Cfinder in Crossflow
...........
....
..
....... ....
......
........
... .. ... ..
. .
-------------------- --------
...... ...............
...... ........
.......
.... - -
........
.............. ........
........
..........
. .............
. ............
A
U
101
0
L)
. ........... ......
. .. ... . . . . . . . . . .
......
......
............
J ..
............
... ... ....
-:- .......
.... .......
... .
............
...
..
...................... ..........
..........
........ .
.......
'on
..............
. ........ .
. ....... ...
.......
.......
............
.. ...
.............
.. .........
10-I
10' 100 10 10 10?
Reynolds Number (ReD) id
Figure 4-5: Simulated Drag Coefficient Data for Cylinder in Crossflow.
10
4.5 Analyzing a Generic Angled Face
Before importing and testing the FLS design from Chapters 2 and 3, COMSOL was prepared to model simple models in axial flow. The first two models used were the original REMUS vehicle and a REMUS model augmented with an angled face. These models prepared the
COMSOL workspace for characterizing the FLS nose and provided baseline data for future designs with angled planar faces.
4.5.1 Simulation Geometry, Meshing, and Initialization
In order to quantify the hydrodynamic impact that an angled plane will have when attached to a REMUS UUV, a simplified model was first created to represent the original REMUS vehicle. Twelve feet in length, the model shared the same geometry as the REMUS vehicle in profile, but did not have the various masts, band clamps, and control surfaces that would add unnecessary time and detail to the CFD calculations. In order to test the difference in
56
lift and drag between the angled nose and the previous design, only the front two feet of the vehicle were altered to add the angled face. By keeping the rest of the simulation parameters and model geometry constant, the change in lift and drag could be attributed entirely to the altered model geometry. The control volume was defined as a rectangular prism and geometry was simplified by splitting it with a vertical plane of symmetry. Defining the inlet, outlet, and slip boundaries similar to previous simulations, the final face was defined as a symmetry wall.
In order to appropriate simulation time to the most important aspects of the vehicle, mesh properties were fine-tuned extensively. Mesh domains were established at the rear of the vehicle which allowed for more advanced control of the simulation mesh configuration.
Specifically, a cylinder mesh domain limited the element growth rate, and a plane allowed for the inclusion of a swept mesh. This swept mesh allowed for the calculation and simulation of water running through the remaining simulation control volume, but saved computation time significantly by reducing the resolution. Figure 4-6(a) shows the original REMUS model and Figure 4-7(a) shows the angled model imported and prepared for meshing.
While the surrounding fluid was meshed using the 'Normal' settings for fluid dynamic
CFD, the surface of the imported vehicle body used a mesh with properties shown in Table
4.4. To refine the mesh around the vehicle, six boundary layers were added around the body with a thickness adjustment factor of 2 and stretching factor of 1.2. The mesh control domain behind the vehicle was designated to have a maximum element growth rate of 1.1 and the swept mesh completed the meshing of the control volume. The final geometry had 646,222 mesh elements. In order to compare results, the angled nose was imported and meshed using the same meshing parameters. Figure 4-6(b) shows the final mesh for the original REMUS vehicle and Figure 4-7(b) shows the completed mesh for the angled face.
57
(a)
(c)
~1~
V
10.658
20 40 60
Velocity (in/s)
80 100 120 140
A 146.47
Figure 4-6: Geometry (a), Meshing (b), and Velocity (c) of Original REMUS Nose
Parameter
Maximum Element Size
Minimum Element Size
Resolution of Curvature
Resolution of Narrow Regions
Value Units
0.0519 m
0.00978 m
Maximum Element Growth Rate 1.13
0.5
0.8 n/a n/a n/a
Table 4.4: Element Size Parameters for Original and Angled Noses
58
(a)
V 2.138
Velocity (is)
60 80
A 147.68
20 40 100 120 140
Figure 4-7: Geometry (a), Meshing (b), and Velocity (c) of Angled Nose
59
Drag Coefficient (CD)
Lift Coefficient (CL)
Mean Decimal Increase Percent Increase
0.4215
0.0834
1.83%
38.3%
Table 4.5: Lift and Drag Impacts of Angled Nose
4.5.2 Results
In order to produce a line of best fit for a range of Reynolds numbers in the vehicle's operational range, eight data points were evenly spaced between Reynolds values of 1.0 x 105 to 2.16 x 10
7
. Each simulation was solved using the GMRES iterative solver and took approximately one hour and fifteen minutes, the results were exported and analyzed in Excel where lift and drag were calculated. Observing Figures 4-6(c) and 4-7(c), it is evident that there are differences between calculated velocity profiles between the REMUS and angled noses, but they are subtle. Differences are better seen in Figures 4-8 and 4-9, displaying the gradient of pressure experienced by each model. It is this gradient which generates data for calculation of lift and drag as discussed earlier in this chapter.
Plotting the data and finding trend lines using the same methods as post analysis of the cylinder in cross flow, Figures 4-10 and 4-11 were generated. The final polynomial equations relating drag and lift coefficient to the operational Reynolds number are shown in Equations
4.8 through 4.11. Equations 4.8 and 4.9 describe the drag and lift of the original REMUS vehicle respectively, and Equations 4.10 and 4.11 describe the drag and lift of the angled face. In order to quantitatively compare the impact of adding an angled face to a REMUS vehicle, the mean of the difference of the original and angled nose lift and drag values were calculated. After the simulated addition of an angled nose, the drag coefficient increased
1.83% by an average value of 0.4215 and the lift coefficient increased 38.3% by an average value of 0.0834 as shown in Table 4.5. Full data for the angled and original REMUS simulations are documented in Tables A.2 and A.3.
60
V
-0.7528
Pressure (psi)
: I I I l l m
-0.7528 -0.6344-0.5329-0.4314-0.3299-02284-0.1269-0,0254 0.0761 0.1775 0.279 0.3805 0.482 0.5835
A 0.5835
Figure 4-8: Heat Map of Pressure Data for Original REMUS Vehicle.
1 I
10
Pressure (psi)
11 1
II II II I I i I
-
-1.1036 -0.9539 -0.8256-0.6973-0.5689 -0.4406-0.3123 -0.184 -0.0556 liii ~
0.0727
0.201 0.3294 0.4577
0.586
A 0.586
Figure 4-9: Heat Map of Pressure Data for Angled Nose AUV.
Drag Coefficient of Vehicle in Axial Flow
Angled Nose
-
Original 2500 Nose
AD
0
0
C)
0)
... .
.... ....
101
10 10 10 10'
Reynolds Number (Re.)
Figure 4-10: Simulated Drag Coefficient Data for Angled Cylinder in Axial Flow.
61
0
0
-5
10,
..........
.............. ........
......
...........
.... ..
.......
Lift Coefficient of Vehicle in Axial Flow
-
-....
.............
. . . . . . . .. .. . .
.......
..
- I. I
.......
...............
............ ...........
....... -
-
....... .. ..........
........... .............. ......... ......
............... .......
........ ......
Angled No
Original
.. . . . . . . . . . . .
7 ..........
.......
. . . . . . . . . .. . . . . . . .. .
............................... ................
. . . .. . . . . . . . . .
.................
.....
. .. . . . . . . . .. .
........
..... ...
... ...
. ........ ..
...... ......
10
. ..............
........... ......
.....
.. . . . . . .. . . .
........... ........... ....... .........
..........
. ................... ......
.. . . . . . . . . . . . . . . .. . . .. . . . . . . . .. . .
......
....... .........
. . . . . . . . .. . . .. .
. . . .. . .. . . . . .. .. . . . . .. . . . . . . . .. .
............
............
.. ... .... .....
........... ...... ..........................
.
.
.
.
.............
....
..
.............
.............
.................. ..................... .....
- - 1 ............
. ................ ...............
....
...
.........
.. .
----- : ---- r ----- I
.. ....
..
.......... .
.........
.... I ... .. .
........
................... ...................
... .
.... ... ..
........ ............
......... ........
.. ... ..
...... ...... ...
........ ...........
..............
. .............. ...
......
..... ......
....... ...
.......
................
. . I
........
......
..........
.......... ......
...........................
........ ..
10'3
105
Reynolds Number (Re)
10
Figure 4-11: Simulated Lift Coefficient Data for Angled Cylinder in Axial Flow.
CD-REMUS -0. 001 *log(Re)
4
+0.059*log(Re)
3
-1.120*log(Re)
2
+10.643*log(Re) -35.631
CL-REMUS e 0.001*log(x)
4
-0.092*log(Re)
3
+2.527*log(Re)
2
-29.727*log(Re)+121.269
CD-Angled -0.001*log(x)4+0.067*log(Re)
3
-1.457*log(Re)
2
+13.891*log(Re)-49.436
CL-Angled O.OO1*log(x)
4
+O.087*log(Re)
3
-1.893*log(Re)
2
+18.177*log(Re)-67.062
(4.8)
(4.9)
(4.10)
(4.11)
4.6 Simulating Simplified FLS Model
After validating the COMSOL CFD process by reproducing real world data, characterizing hydrodynamic properties of the original REMUS vehicle, and comparing them against a generic angled nose, it was time to simulate the FLS nose design from Chapters 2 and 3.
62
4.6.1 Simulation Geometry, Meshing, and Initialization
In order to simulate the impact of the FLS nose on REMUS drag and lift coefficients, a simplified model of the new nose was first created in SolidWorks. Preserving the placement and angle of each major component, the simplified model removed bolt holes, the conductivity and temperature sensor, the rope channel, and the recovery channel. By neglecting the interaction of water with these small features, the simulations meshed significantly faster and provided a close prediction of the impact that the RESON SeaBat 7131 sonar has on
REMUS vehicles. In order to compare against the original REMUS nose and the angled nose of the previous section, the mesh parameters was unchanged except for the addition of one cylindrical mesh control domain to increase the resolution of meshing over the FLS surface. Figure 4-12(a) shows the geometric preparation of the FLS model for simulation.
While the rest of the control volume was meshed using the same settings as the original
REMUS vehicle, the new cylinder was meshed using the 'Fine' resolution described in Table
4.4. The final mesh for the FLS vehicle model is shown in Figure 4-12(b).
4.6.2 Results
As anticipated, the FLS nose added a significant amount of drag and lift to the original
REMUS vehicle, but not as much as a flat plane did in the angled nose experiment described in Section 4.5. Figure 4-12(c) shows the heat map of final simulated velocity and Figure
4-13 shows the final calculated pressure gradient on the body of the vehicle. In a similar manner to the previous REMUS models, pressure data was exported to Excel and drag and lift were calculated. Figure 4-14 shows calculated FLS drag compared to that of the original
REMUS and Figure 4-15 shows the comparison of lift between the two simulations. Once again taking the mean of the differences in lift and drag values between models, the drag of
63
V 1.4578
20 40
Velocity (in/s)
60 80 100 120 140
A 142.07
Figure 4-12: Geometry (a), Meshing (b), and Velocity (c) of FLS Nose
64
Drag Coefficient (CD)
Lift Coefficient (CL)
Mean Decimal Increase Percent Increase
0.3040
0.0477
1.30%
21.92%
Table 4.6: Lift and Drag Impacts of FLS Nose
V -1.2144
Pessure (psi)
-1.2144 -1.0559 -0.9201-0,7842 -06484-0.5126-0.3767 -0.2409 -0,105 0.0308 0.1667 0.3025 0.4383 0.5742
A 0.5742
Figure 4-13: Heat Map of Pressure Data for FLS Nose.
the FLS nose was found to be a 1.3% increase from the original with an average coefficient increase of 0.3040. The nose increased the vehicle lift by 21.92%, an average coefficient value of 0.0477 as shown in Table 4.6. Equation 4.12 shows the relationship between Reynolds number and the drag coefficient of the vehicle and Equation 4.13 shows the relationship between Reynolds number and the lift coefficient of the vehicle. Table A.4, shown in the appendix, contains all data collected during simulation of the FLS nose.
CD-FLS
= e-1.695x10-5*log(Re)
4
+9.437x1O
5
-*log(Re)
3
+0.02193*og(Re)
2
-0.503*log(Re)+2.4972
(4.12)
CL-FLS = e-O.001*log(Re)
4
-0.092*1og(Re)
3
+2.527*og(Re)
2
-29.727*log(Re)+121.269
(4.13)
65
Drag Coefficient of Vehicle in Axial Flow
-
-FLS Nose
Onginal 2500 Nose
0
0
15
10 1 107
Reynolds Number (Red
Figure 4-14: Simulated Drag Coefficient Data for FLS UUV in Axial Flow.
10
Lift Coefficient of Vehicle in Axial Flow
--
-FLS Nose
Original
2500 Nose
0
C)
10
10 in
1n
Reynolds Number (Re )
Figure 4-15: Simulated Lift Coefficient Data for FLS UUV in Axial Flow.
10
66
4.7 Implications of CFD Results
Many REMUS operators utilize detailed dynamic simulation environments to model their vehicle's mission capabilities before testing them in the water. These simulated missions use vehicle control algorithms to move individual control surfaces and calculate how the vehicle responds in the selected fluid medium. The accuracy of the calculated vehicle movement relies upon the hydrodynamic properties of each individual piece of vehicle hardware. By providing operators with the change in lift and drag coefficients obtained in Chapter 4, the properties of the REMUS 2500 model can be modified accordingly. This will allow for accurate predictions of how current vehicle control algorithms and control surfaces will account for the addition of an angled face in the bow of the vehicle, and whether current configurations are adequately prepared for attachment of the FLS nose. The final results from CFD calculations, along with percent increases are shown in Figures 4-16 and 4-17.
67
10
10
Lift Coefficient of Vehicle in Axial Flow
-
-FLS
-
Nose
Angled Nose
Ongna 2500 Nose
1
0
10'
Figure 4-16: Lift Coefficients Of Each Tested Model
21.92% 3830%
Drag Coefficient of Vehicle in Axial Flow
-Anled Nose
100
0' 10'
10'
Reynolds Number (Red
Figure 4-17: Drag Coefficients Of Each Tested Model.
68
Chapter 5
Conclusions
5.1 Thesis Summary
Ultimately, this thesis delivered a method of integrating the RESON SeaBat 7131 sonar into the nose of a REMUS 2500 vehicle while maintaining ability to interface with the preexisting shipboard launch and recovery device. The overall length and buoyancy of the proposed design met the established design requirements, and each of the solenoid functions was preserved. By using FEA through SolidWorks, the structure was optimized for strength and weight. In simulation, the final nose structure withstood 1,0001bf in the transverse and
5,0001bf in the axial direction which met and exceeded safety factor goals. Once the design was finalized, CFD simulations in COMSOL characterized the anticipated lift and drag coefficients of the nose addition at various operating speeds. These characteristic curves, along with the the complete CAD design, were delivered to the manufacturing authority as they were completed. The design is currently being reviewed and approved in anticipation of manufacturing by the end of 2015.
In order to provide baseline data for future FLS design and simulation, a cylinder with an angled face was also characterized through CFD simulation. At a 10 degree downward
69
angle, the angled cylinder was compared in axial flow to a standard REMUS 2500 nose under similar conditions. By characterizing the impact of an FLS on a vehicle's drag and lift properties, future simulations in this area of study will have a benchmark with which to compare results.
5.2 Recommendations for Future Research Efforts
In order to continue gathering information on the impact of FLS hardware on a vehicle's hydrodynamic properties, it will be essential to continue refining simulations and validating them with tow tank testing. This thesis was conducted on a single computer without utilizing a computational cluster. With more time and resources, it would be a valuable investment to simulate a more detailed model of the FLS nose as well as more noses varying in angle.
With the growing presence of large FLS units on the front of UUV's, characterization of simplified noses with prominent flat angled planes would provide exceptional reference for future integration efforts. With a catalog of characterized and verified standard FLS shapes, vehicle endurance and control stability methods could be predicted before investing in the design of new hardware.
70
Appendix A
Additional Tables and Figures
71
Reynolds Number Drag Coefficient (CD)
1.00 x 10-1 1.86 x 102
2.16 x 10-1
4.63 x 10-1
1.00 x 10
0
2.16 x 100
4.63 x 100
9.06 x 101
4.95 x 101
2.26 x 101
1.74 x 101
1.31 x 101
1.00 x 101
1.25 x 101
4.63 x 101
4.43 x 100
3.97 x 100
2.37 x 100
1.92 x 100 1.00 x 102
2.16 x 102
4.63 x 102
1.66
1.42 x x
100
100
1.00 x 103
2.16 x 10
3
4.63 x 103
1.00 x 104
2.16 x 10
4
5.00 x 10
4
1.00 x 105
2.16 x 105
4.63 x 105
9.04 x 105
1.16 x 100
9.32 x 10-1
7.91 x 10-1
7.55 x 10-1
7.37 x 10-1
7.31 x 10-1
7.20 x 10-1
7.16 x 10-1
7.13 x 10-1
7.11 x 10-1
Table A.1: Data Collected During Crossflow Simulations
Reynolds Number Drag Coefficient (CD) Lift Coefficient (CL)
1.00 x 105
2.16 x 10
5
4.64 x 105
0.2870
0.2640
0.2370
0.0042
0.0022
0.0023
1.00 x 106
2.16 x 106
4.64 x 106
1.00 x 107
2.16 x 107
0.2220
0.2150
0.2090
0.2050
0.2020
0.0016
0.0017
0.0019
0.0018
0.0016
Table A.2: Data Collected During Simulation of Original REMUS Nose
72
Reynolds Number Drag Coefficient (CD) Lift Coefficient(CL)
1.00 x 105 0.7040 0.0939
2.16 x
4.64 x
1.00
2.16 x 106
4.64
1.00 x x 106 x
2.16 x
105
105
106
107
107
0.6980
0.6780
0.6470
0.6300
0.6230
0.6180
0.6150
0.0937
0.0908
0.0853
0.0823
0.0807
0.0794
0.0785
Table A.3: Data Collected During Simulation of Angled Nose
Reynolds Number Drag Coefficient(CD) Lift Coefficient(CL)
1.00 x 105 0.5810 0.0478
2.16 x 105
4.64 x 105
1.00 x
106
2.16 x 106
4.64 x 106
0.5580
0.5390
0.5290
0.5220
0.5180
0.0499
0.0505
0.0503
0.0502
0.0502
1.00 x 107
2.16 x 10
7
0.5140
0.5120
0.0502
0.0502
Table A.4: Data Collected During Simulation of FLS Nose
73
THIS PAGE INTENTIONALLY LEFT BLANK
74
Bibliography
[1]
M. Ashby and K. Johnson. Materials and Design, volume 1. Butterworth-Heinemann,
30 Corporate Drive, Suite 400, Burlington, MA 01803, 2 edition, 10 2009.
[2] COMSOL Multiphysics. Airflow over an Ahmed Body.
[3] COMSOL Multiphysics. Flow Past a Cylinder.
[4] S.F. Hoerner. Fluid-dynamic drag: practical information on aerodynamic drag and hy-
drodynamic resistance. Hoerner Fluid Dynamics.
[5] J. Newman. Marine Hydrodynamics, volume 1. The MIT Press, Cambridge, MA 02142,
08 1977.
[6] Woods Hole Oceanographic. Remus 3000, 2010. [Online; accessed 10-June-2014].
[7] Woods Hole Oceanographic. Remus, 2014. [Online; accessed 10-June-2014].
[8] RESON. SeaBat 7130 A UV Dual Frequency High-Resolution 3-Dimensional Forward-
Looking Sonar System Operator's Manual, 2 edition, 1 2013.
75