Document 11094758
advertisement

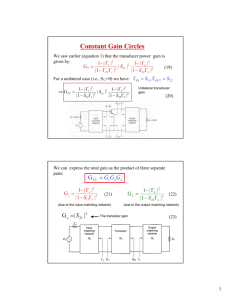
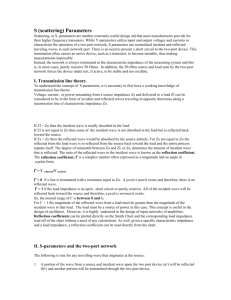
Berkeley Power Gain and Stability Prof. Ali M. Niknejad U.C. Berkeley c 2014 by Ali M. Niknejad Copyright September 17, 2014 Niknejad Power Gain Power Gain Niknejad Power Gain Power Gain PL Pin YS ! + vs − y11 y21 y12 y22 " YL Pav,l Pav,s We can define power gain in many different ways. The power gain Gp is defined as follows Gp = PL = f (YL , Yij ) 6= f (YS ) Pin We note that this power gain is a function of the load admittance YL and the two-port parameters Yij . Niknejad Power Gain Power Gain (cont) The available power gain is defined as follows Ga = Pav ,L = f (YS , Yij ) 6= f (YL ) Pav ,S The available power from the two-port is denoted Pav ,L whereas the power available from the source is Pav ,S . Finally, the transducer gain is defined by GT = PL = f (YL , YS , Yij ) Pav ,S This is a measure of the efficacy of the two-port as it compares the power at the load to a simple conjugate match. Niknejad Power Gain Bi-Conjugate Match When the input and output are simultaneously conjugately matched, or a bi-conjugate match has been established, we find that the transducer gain is maximized with respect to the source and load impedance GT ,max = Gp,max = Ga,max This is thus the recipe for calculating the optimal source and load impedance in to maximize gain Yin = Y11 − Y12 Y21 = YS∗ YL + Y22 Yout = Y22 − Y12 Y21 = YL∗ YS + Y11 Solution of the above four equations (real/imag) results in the optimal YS,opt and YL,opt . Niknejad Power Gain Calculation of Optimal Source/Load Another approach is to simply equate the partial derivatives of GT with respect to the source/load admittance to find the maximum point ∂GT ∂GT = 0; =0 ∂GS ∂BS ∂GT ∂GT = 0; =0 ∂GL ∂BL Niknejad Power Gain Optimal Power Gain Derivation (cont) Again we have four equations. But we should be smarter about this and recall that the maximum gains are all equal. Since Ga and Gp are only a function of the source or load, we can get away with only solving two equations. For instance ∂Ga ∂Ga = 0; =0 ∂GS ∂BS ∗ we can find the This yields YS,opt and by setting YL = Yout YL,opt . Likewise we can also solve ∂Gp ∂Gp = 0; =0 ∂GL ∂BL And now use YS,opt = Yin∗ . Niknejad Power Gain Optimal Power Gain Derivation Let’s outline the procedure for the optimal power gain. We’ll use the power gain Gp and take partials with respect to the load. Let Yjk = mjk + jnjk YL = GL + jXL Y12 Y21 = P + jQ = Le jφ <(YL ) |Y21 |2 |Y21 |2 GL = |YL + Y22 |2 <(Yin ) D Y12 Y21 <(Y12 Y21 (YL + Y22 )∗ ) < Y11 − = m11 − YL + Y22 |YL + Y22 |2 Gp = D = m11 |YL + Y22 |2 − P(GL + m22 ) − Q(BL + n22 ) ∂Gp |Y21 |2 GL ∂D =0=− ∂BL D 2 ∂BL Niknejad Power Gain Optimal Load (cont) Solving the above equation we arrive at the following solution BL,opt = Q − n22 2m11 In a similar fashion, solving for the optimal load conductance q 1 GL,opt = (2m11 m22 − P)2 − L2 2m11 If we substitute these values into the equation for Gp (lot’s of algebra ...), we arrive at Gp,max = |Y |2 p 21 2m11 m22 − P + (2m11 m22 − P)2 − L2 Niknejad Power Gain Final Solution Notice that for the solution to exists, GL must be a real number. In other words (2m11 m22 − P)2 > L2 (2m11 m22 − P) > L 2m11 m22 − P >1 K= L This factor K plays an important role as we shall show that it also corresponds to an unconditionally stable two-port. We can recast all of the work up to here in terms of K √ Y12 Y21 + |Y12 Y21 |(K + K 2 − 1) YS,opt = 2<(Y22 ) √ Y12 Y21 + |Y12 Y21 |(K + K 2 − 1) YL,opt = 2<(Y11 ) Y21 1 √ Gp,max = GT ,max = Ga,max = Y12 K + K 2 − 1 Niknejad Power Gain Maximum Gain The maximum gain is usually written in the following insightful form Gmax = p Y21 (K − K 2 − 1) Y12 For a reciprocal network, such as a passive element, Y12 = Y21 and thus the maximum gain is given by the second factor p Gr ,max = K − K 2 − 1 Since K > 1, |Gr ,max | < 1. The reciprocal gain factor is known as the efficiency of the reciprocal network. The first factor, on the other hand, is a measure of the non-reciprocity. Niknejad Power Gain Unilateral Maximum Gain For a unilateral network, the design for maximum gain is trivial. For a bi-conjugate match ∗ YS = Y11 ∗ YL = Y22 GT ,max = Niknejad |Y21 |2 4m11 m22 Power Gain Ideal MOSFET Cgs + vin − gm vin ro Cds The AC equivalent circuit for a MOSFET at low to moderate frequencies is shown above. Since |S11 | = 1, this circuit has infinite power gain. This is a trivial fact since the gate capacitance cannot dissipate power whereas the output can deliver real power to the load. Niknejad Power Gain Real MOSFET Ri + vs − Ri Cgs + vin − gm vin R ds Cds R ds A more realistic equivalent circuit is shown above. If we make the unilateral assumption, then the input and output power can be easily calculated. Assume we conjugate match the input/output |VS |2 Pavs = 8Ri 2 ∗ 1 1 gm V1 PL = <( 2 IL VL ) = 2 Rds 2 2 V1 2 GTU,max = gm Rds Ri VS Niknejad Power Gain Real MOSFET (cont) At the center resonant frequency, the voltage at the input of the FET is given by V1 = GTU,max = 1 VS jωCgs 2Ri Rds (gm /Cgs )2 Ri 4ω 2 This can be written in terms of the device unity gain frequency fT 1 Rds fT 2 GTU,max = 4 Ri f The above expression is very insightful. To maximum power gain we should maximize the device fT and minimize the input resistance while maximizing the output resistance. Niknejad Power Gain Stability of a Two-Port Niknejad Power Gain Stability of a Two-Port A two-port is unstable if the admittance of either port has a negative conductance for a passive termination on the second port. Under such a condtion, the two-port can oscillate. Consider the input admittance Y12 Y21 Yin = Gin + jBin = Y11 − Y22 + YL Using the following definitions Y11 = g11 + jb11 Y12 Y21 = P + jQ = L∠φ Y22 = g22 + jb22 YL = GL + jBL Now substitute real/imag parts of the above quantities into Yin P + jQ Yin = g11 + jb11 − g22 + jb22 + GL + jBL (P + jQ)(g22 + GL − j(b22 + BL )) = g11 + jb11 − (g22 + GL )2 + (b22 + BL )2 Niknejad Power Gain Input Conductance Taking the real part, we have the input conductance <(Yin ) = Gin = g11 − = P(g22 + GL ) + Q(b22 + BL ) (g22 + GL )2 + (b22 + BL )2 (g22 + GL )2 + (b22 + BL )2 − P g11 (g22 + GL ) − Q g11 (b22 + BL ) D Since D > 0 if g11 > 0, we can focus on the numerator. Note that g11 > 0 is a requirement since otherwise oscillations would occur for a short circuit at port 2. The numerator can be factored into several positive terms P Q (g22 + GL ) − (b22 + BL ) g11 g11 2 2 P Q P2 + Q2 = GL + g22 − + BL + b22 − − 2 2g11 2g11 4g11 N = (g22 + GL )2 + (b22 + BL )2 − Niknejad Power Gain Input Conductance (cont) Now note that the numerator can go negative only if the first two terms are smaller than the last term. To minimize the first two terms, choose GL = 0 and BL = − b22 − 2gQ11 (reactive load) Nmin P 2 P2 + Q2 = g22 − − 2 2g11 4g11 And thus the above must remain positive, Nmin > 0, so P 2 P2 + Q2 − g22 + >0 2 2g11 4g11 g11 g22 > P +L L = (1 + cos φ) 2 2 Niknejad Power Gain Linvill/Llewellyn Stability Factors Using the above equation, we define the Linvill stability factor L < 2g11 g22 − P C= L <1 2g11 g22 − P The two-port is stable if 0 < C < 1. Niknejad Power Gain Stability (cont) It’s more common to use the inverse of C as the stability measure 2g11 g22 − P >1 L The above definition of stability is perhaps the most common K= 2<(Y11 )<(Y22 ) − <(Y12 Y21 ) >1 |Y12 Y21 | The above expression is identical if we interchange ports 1/2. Thus it’s the general condition for stability. Note that K > 1 is the same condition for the maximum stable gain derived earlier. The connection is now more obvious. If K < 1, then the maximum gain is infinity! Niknejad Power Gain Stability From Another Perspective We can also derive stability in terms of the input reflection coefficient. For a general two-port with load ΓL we have + + + v2− = Γ−1 L v2 = S21 v1 + S22 v2 v2+ = S21 v− − S22 1 Γ−1 L S12 S21 ΓL v1+ = S11 + 1 − ΓL S22 S12 S21 ΓL Γ = S11 + 1 − ΓL S22 If |Γ| < 1 for all ΓL , then the two-port is stable v1− Γ= S11 (1 − S22 ΓL ) + S12 S21 ΓL S11 + ΓL (S21 S12 − S11 S22 ) = 1 − S22 ΓL 1 − S22 ΓL = Niknejad S11 − ∆ΓL 1 − S22 ΓL Power Gain Stability Circle To find the boundary between stability/instability, let’s set |Γ| = 1 S11 − ∆ΓL 1 − S22 ΓL = 1 |S11 − ∆ΓL | = |1 − S22 ΓL | After some algebraic manipulations, we arrive at the following equation ∗ ∗ ΓL − S22 − ∆ S11 = |S12 S21 | 2 2 |S22 | − |∆| |S22 |2 − |∆|2 This is of course an equation of a circle, |ΓL − C | = R, in the complex plane with center at C and radius R Thus a circle on the Smith Chart divides the region of instability from stability. Niknejad Power Gain Example: Stability Circle In this example, the origin of the circle lies outside the stability circle but a portion of the circle falls inside the unit circle. Is the region of stability inside the circle or outside? RS re re gion gio n CS le tab uns table s |S11 | < 1 This is easily determined if we note that if ΓL = 0, then Γ = S11 . So if S11 < 1, the origin should be in the stable region. Otherwise, if S11 > 1, the origin should be in the unstable region. Niknejad Power Gain Stability: Unilateral Case Consider the stability circle for a unilateral two-port CS = ∗ ∗ − (S ∗ S ∗ )S S11 S11 11 22 22 = |S11 |2 − |S11 S22 |2 |S11 |2 1 |CS | = RS = 0 |S11 | The cetner of the circle lies outside of the unit circle if |S11 | < 1. The same is true of the load stability circle. Since the radius is zero, stability is only determined by the location of the center. If S12 = 0, then the two-port is unconditionally stable if S11 < 1 and S22 < 1. This result is trivial since ΓS |S12 =0 = S11 The stability of the source depends only on the device and not on the load. Niknejad Power Gain Mu Stability Test If we want to determine if a two-port is unconditionally stable, then we should use the µ test µ= 1 − |S11 |2 ∗ | + |S S | > 1 |S22 − ∆S11 12 21 The µ test not only is a test for unconditional stability, but the magnitude of µ is a measure of the stability. In other words, if one two port has a larger µ, it is more stable. The advantage of the µ test is that only a single parameter needs to be evaluated. There are no auxiliary conditions like the K test derivation earlier. The derivation of the µ test proceeds as follows. First let ΓS = |ρs |e jφ and evaluate Γout Γout = Niknejad S22 − ∆|ρs |e jφ 1 − S11 |ρs |e jφ Power Gain Mu Test (cont) Next we can manipulate this equation into the following circle |Γout − C | = R p ∗ ∆−S |ρs ||S12 S21 | |ρ |S s 22 11 = Γout + 2 1 − |ρs ||S11 | (1 − |ρs ||S11 |2 ) For a two-port to be unconditionally stable, we’d like Γout to fall within the unit circle ||C | + R| < 1 p ∗ ||ρs |S11 ∆ − S22 | + |ρs ||S21 S12 | < 1 − |ρs ||S11 |2 p ∗ ∆ − S22 | + |ρs ||S21 S12 | + |ρs ||S11 |2 < 1 ||ρs |S11 The worse case stability occurs when |ρs | = 1 since it maximizes the left-hand side of the equation. Therefore we have 1 − |S11 |2 µ= ∗ >1 |S11 ∆ − S22 | + |S12 S21 | Niknejad Power Gain K-∆ Test The K stability test has already been derived using Y parameters. We can also do a derivation based on S parameters. This form of the equation has been attributed to Rollett and Kurokawa. The idea is very simple and similar to the µ test. We simply require that all points in the instability region fall outside of the unit circle. The stability circle will intersect with the unit circle if |CL | − RL > 1 or ∗ − ∆∗ S | − |S S | |S22 11 12 21 >1 2 2 |S22 | − |∆| This can be recast into the following form (assuming |∆| < 1) K= 1 − |S11 |2 − |S22 |2 + |∆|2 >1 2|S12 ||S21 | Niknejad Power Gain Two-Port Power and Scattering Parameters The power flowing into a two-port can be represented by Pin = |V1+ |2 (1 − |Γin |2 ) 2Z0 The power flowing to the load is likewise given by PL = |V2− |2 (1 − |ΓL |2 ) 2Z0 We can solve for V1+ using circuit theory V1+ + V1− = V1+ (1 + Γin ) = Zin VS Zin + ZS In terms of the input and source reflection coefficient Zin = 1 + Γin Z0 1 − Γin ZS = Niknejad 1 + ΓS Z0 1 − ΓS Power Gain Two-Port Incident Wave Solve for V1+ V1+ (1 + Γin ) = VS (1 + Γin )(1 − ΓS ) (1 + Γin )(1 − ΓS ) + (1 + ΓS )(1 − Γin ) V1+ = VS 1 − ΓS 2 1 − Γin ΓS The voltage incident on the load is given by V2− = S21 V1+ + S22 V2+ = S21 V1+ + S22 ΓL V2− S21 V1+ 1 − S22 ΓL 2 |S21 |2 V1+ 1 − |ΓL |2 PL = |1 − S22 ΓL |2 2Z0 V2− = Niknejad Power Gain Operating Gain and Available Power The operating power gain can be written in terms of the two-port s-parameters and the load reflection coefficient Gp = PL |S21 |2 (1 − |ΓL |2 ) = Pin |1 − S22 ΓL |2 (1 − |Γin |2 ) The available power can be similarly derived from V1+ Pavs = Pin |Γin =Γ∗ = S + V1a = V1+ Γ ∗ in =ΓS Pavs = Niknejad + 2 V 1a 2Z0 = (1 − |Γ∗S |2 ) VS 1 − Γ∗S 2 1 − |ΓS |2 |VS |2 |1 − ΓS |2 8Z0 1 − |ΓS |2 Power Gain Transducer Gain The transducer gain can be easily derived GT = |S21 |2 (1 − |ΓL |2 )(1 − |ΓS |2 ) PL = Pavs |1 − Γin ΓS |2 |1 − S22 ΓL |2 Note that as expected, GT is a function of the two-port s-parameters and the load and source impedance. If the two port is connected to a source and load with impedance Z0 , then we have ΓL = ΓS = 0 and GT = |S21 |2 Niknejad Power Gain Unilateral Gain Z0 + vs − M1 ! S11 S21 0 S22 |S21 | GS " 2 M2 Z0 GL If S12 ≈ 0, we can simplify the expression by just assuming S12 = 0. This is the unilateral assumption GTU = 1 − |ΓS |2 |1 − S11 ΓS |2 |S21 |2 1 − |ΓL |2 |1 − S22 ΓL |2 = GS |S21 |2 GL The gain partitions into three terms, which can be interpreted as the gain from the source matching network, the gain of the two port, and the gain of the load. Niknejad Power Gain Maximum Unilateral Gain We know that the maximum gain occurs for the biconjugate match ∗ ΓS = S11 ∗ ΓL = S22 GS,max = GL,max = GTU,max = 1 1 − |S11 |2 1 1 − |S22 |2 |S21 |2 (1 − |S11 |2 )(1 − |S22 |2 ) Note that if |S11 | = 1 of |S22 | = 1, the maximum gain is infinity. This is the unstable case since |Sii | > 1 is potentially unstable. Niknejad Power Gain Design for Gain So far we have only discussed power gain using bi-conjugate matching. This is possible when the device is unconditionally stable. In many case, though, we’d like to design with a potentially unstable device. Moreover, we would like to introduce more flexibility in the design. We can trade off gain for bandwidth noise gain flatness linearity etc. We can make this tradeoff by identifying a range of source/load impedances that can realize a given value of power gain. While maximum gain is acheived for a single point on the Smith Chart, we will find that a lot more flexibility if we back-off from the peak gain. Niknejad Power Gain Unilateral Design No real transistor is unilateral. But most are predominantly unilateral, or else we use cascades of devices (such as the cascode) to realize such a device. The unilateral figure of merit can be used to test the validity of the unilateral assumption Um = |S12 |2 |S21 |2 |S11 |2 |S22 |2 (1 − |S11 |2 )(1 − |S22 |2 ) It can be shown that the transducer gain satisfies the following inequality 1 GT 1 < < (1 + U)2 GTU (1 − U)2 Where the actual power gain GT is compared to the power gain under the unilateral assumption GTU . If the inequality is tight, say on the order of 0.1 dB, then the amplifier can be assumed to be unilateral with negligible error. Niknejad Power Gain Gain Circles We now can plot gain circles for the source and load. Let gS = gL = GS GS,max GL GL,max By definition, 0 ≤ gS ≤ 1 and 0 ≤ gL ≤ 1. One can show that a fixed value of gS represents a circle on the ΓS plane √ 2 ∗ g 1 − g (1 − |S | ) S 11 S 11 S ΓS − = 2 2 |S11 | (gS − 1) + 1 |S11 | (gS − 1) + 1 More simply, |ΓS − CS | = RS . A similar equation can be derived for the load. Note that for gS = 1, RS = 0, and ∗ corresponding to the maximum gain. CS = S11 Niknejad Power Gain Gain Circles (cont) 0.11 0.1 45 50 1.4 1.2 1.0 0.9 0.8 1.6 1.8 0.6 60 8 2.0 0.0 6 0.4 4 70 5 0.4 20 3.0 0.6 0.3 CT AN C 0.8 IND UCT IV E 4.0 15 1.0 0.22 0.28 REA gS = 0 dB 5.0 1.0 0.0 0.1 0.3 2 25 EC 75 0.4 5 OM PO NE NT (+ jX /Z o 0.4 10 0.2 0.8 0.27 0.1 50 20 10 5.0 4.0 3.0 1.8 2.0 1.6 1.4 1.2 1.0 50 0.9 0.8 0.7 0.6 0.5 0.4 0.3 0.2 0.0 0.2 0.1 0.4 20 LOAD <— 0.2 20 TA EP SC SU IVE CT DU 0.14 0.36 0.12 0.13 0.38 0.37 0.11 6 0.0 -70 - 0.5 -65 2.0 0.1 CE CO M PO NE NT ( 7 0.0 0.6 1.8 1.6 1.4 0 1.0 0.9 0.8 1.2 0.35 5 -4 0.15 RE AC TA N 0.09 -5 -4 0 -55 -35 0.16 0.34 0.7 0.17 0.33 IVE -60 -30 2 CAP AC IT -75 N RI ), O o /Z jX 0.3 0.2 4 0.4 -25 0.3 1 8 -80 1.0 ) /Yo 0.4 0.1 9 0.1 -85 jB E (NC 0.6 -20 5 0.0 0.8 3.0 0.3 5 0.4 4.0 TO GTHS ELEN WAV <— -90 1.0 -15 0.47 5.0 0.04 0.28 0.29 0.2 0.4 0.22 0.3 0.21 0.46 0.8 gS = −3 dB 0.27 0.6 gS = −2 dB 0.23 0.2 0.4 10 gS = −1 dB 0.1 -10 WARD 50 0.49 RESISTANCE COMPONENT (R/Zo), OR CONDUCTANCE COMPONENT (G/Yo) 0.48 0.25 0.26 0.24 0.25 0.24 0.26 C OF REFLECTION OEFFICIENT IN DEGREES ANGLE TRANSMISSION COEFFICIENT IN DEGRE ES ∗ S11 OF ANGLE 10 ̸ 0.23 0.6 0.04 0.17 0.33 30 0.2 0.21 80 0.16 0.34 35 0.29 0.46 C AN PT o) jB/Y E (+ 0.3 0.0 0.15 40 0.2 —> WAVEL ENGTH S T OW AR D 0.49 GEN ERA 0.48 TOR —> 0.47 90 85 E SC SU VE ITI 0.14 0.36 1 0.3 RC ), O AC AP 0.37 9 0.1 0.5 65 3 0.4 0.13 0.38 0.7 0.08 7 0.0 0.12 0.35 55 0.41 0.42 0.39 0.4 0.09 0.4 3 0.08 0.42 0.41 0.4 0.39 All gain circles lie on the line given by the angle of Sii∗ . We can select any desired value of source/load reflection Power Gain coefficient to acheive Niknejad the desired gain. To minimize the Extended Smith Chart For |Γ| > 1, we can still employ the Smith Chart if we make the following mapping. The reflection coefficient for a negative resistance is given by Γ(−R + jX ) = (R + Z0 ) − jX −R + jX − Z0 = −R + jX + Z0 (R − Z0 ) − jX 1 (R − Z0 ) + jX = ∗ Γ (R + Z0 ) + jX We see that Γ can be mapped to the unit circle by taking 1/Γ∗ and reading the resistance value (and noting that it’s actually negative). Niknejad Power Gain Potentially Unstable Unilateral Amplifier For a unilateral two-port with |S11 | > 1, we note that the input impedance has a negative real part. Thus we can still design a stable amplifier as long as the source resistance is larger than <(Zin ) <(ZS ) > |<(Zin )| The same is true of the load impedance if |S22 | > 1. Thus the design procedure is identical to before as long as we avoid source or load reflection coefficients with real part less than the critical value. Niknejad Power Gain Pot. Unstable Unilateral Amp Example Consider a transistor with the following S-Parameters S12 = 0 S11 = 2.02∠ − 130.4◦ S21 = 5.00∠60◦ S22 = 0.50∠ − 70◦ 0.11 0.1 45 50 1.4 1.2 1.0 0.9 55 1.6 1.8 2.0 0.0 6 0.4 4 70 0.05 0.45 region ble sta 20 3.0 0.6 0.3 0.46 0.18 0.32 25 0.4 RS 0.8 GS = 5 dB 4.0 15 5.0 1.0 IND UCT IVE 1.0 0.27 0.6 10 0.25 0.26 0.24 0.25 0.24 0.26 CO OF REFLECTION EFFICIENT IN DEGREES ANGLE ISSION COEFFICIENT IN D EGREES OF TRANSM ANGLE 0.2 ΓS 0.23 CS 90 10 0.8 0.4 0.04 0.4 80 0.17 0.33 30 0.2 0.22 0.28 REA 75 CT AN CE CO MP ON EN T( +j X/ Zo 6 4 0.21 0.47 0.1 0.3 35 0.29 —> o) jB/Y E (+ NC TA EP SC SU 0.3 85 0.15 40 0.2 0.1 20 0.2 —> WAVEL ENGTH S TOW ARD 0.49 GEN ERA 0.48 TOR E TIV CI PA CA 0.14 0.36 1 0.3 R ), O 0.37 9 0.1 65 0.5 0.43 0.13 0.38 0.7 0.6 60 0.07 0.12 0.35 1 0.08 0.42 0.39 0.4 9 0.4 0.8 0.0 50 20 10 5.0 4.0 3.0 2.0 1.8 1.6 1.4 1.2 1.0 0.9 0.8 0.7 0.6 0.5 0.4 0.3 0.2 0.1 0.0 0.0 50 20 0.4 0.1 1.0 o) jB/Y E (NC TA EP SC SU -80 E TIV UC ND RI ,O o) /Z jX -75 0.05 0.6 0.43 CAP AC 0.07 ITIV ER EA CT AN CE CO M PO NE NT (- 2.0 0.5 1.8 -65 0.2 1.4 1.2 1.0 0 -4 0.15 0.35 0.9 6 5 -4 4 0.0 0 -5 -35 0.1 0.3 0.8 0.17 -55 Now any source inside this circle is stable, since <(ZS ) > <(Zin ). We also draw the source gain circle for GS = 5 dB. 0.33 0.7 1.6 -30 0.6 0.18 0.1 0.14 0.36 0.12 0.13 0.38 0.37 -60 -25 0.3 1 0.11 0.39 0.4 0.08 0.42 9 0.4 1 4 0.4 9 6 0.0 -70 0.4 0.1 0.32 0.04 0.8 3.0 -20 0.46 4.0 0.47 1.0 -15 0.3 0.45 0.28 0.2 0.4 0.29 0.21 0.3 5.0 -85 10 0.8 0.27 0.6 0.23 0.2 1 ∗ S11 -10 0.49 50 0.2 0.22 0.48 <— RD LOAD TOWA GTHS ELEN WAV <— -90 RESISTANCE COMPONENT (R/Zo), OR CONDUCTANCE COMPONENT (G/Yo) Since |S11 | > 1, the amplifier is potentially unstable. We begin by ∗ to find the plotting 1/S11 negative real input resistance. Niknejad Power Gain Amp Example (cont) ∗ . The input impedance is read off the Smith Chart from 1/S11 Note the real part is interpreted as negative Zin = 50(−0.4 − 0.4j) The GS = 5 dB gain circle is calculated as follows gS = 3.15(1 − |S11 |2 ) √ 1 − gS (1 − |S11 |2 ) = 0.236 RS = 1 − |S11 |2 (1 − gS ) ∗ gS S11 CS = = −.3 + 0.35j 1 − |S11 |2 (1 − gS ) We can select any point on this circle and obtain a stable gain of 5 dB. In particular, we can pick a point near the origin (to maximize the BW) but with as large of a real impedance as possible: ZS = 50(0.75 + 0.4j) Niknejad Power Gain Bilateral Amp Design In the bilateral case, we will work with the power gain Gp . The transducer gain is not used since the source impedance is a function of the load impedaance. Gp , on the other hand, is only a function of the load. |S21 |2 (1 − |ΓL |2 ) Gp = = |S21 |2 gp S11 −∆ΓL 2 2 1 − 1−S22 ΓL |1 − S22 ΓL | It can be shown that gp is a circle on the ΓL plane. The radius and center are given by q 1 − 2K |S12 S21 |gp + |S12 S21 |2 gp2 RL = 2 2 2 −1 − |S | g + |∆| g 22 p p CL = ∗ − ∆∗ S ) gp (S22 11 1 + gp (|S22 |2 − |∆|2 ) Niknejad Power Gain Bilateral Amp (cont) We can also use this formula to find the maximum gain. We know that this occurs when RL = 0, or 2 1 − 2K |S12 S21 |gp,max + |S12 S21 |2 gp,max =0 p 1 K − K2 − 1 |S12 S21 | p S21 K − K2 − 1 = S12 gp,max = Gp,max The design procedure is as follows 1 2 3 4 5 Specify gp Draw operating gain circle. Draw load stability circle. Select ΓL that is in the stable region and not too close to the stability circle. Draw source stability circle. To maximize gain, calculate Γin and check to see if ΓS = Γ∗in is in the stable region. If not, iterate on ΓL or compromise. Niknejad Power Gain