Prediction of Rainfall in Saudi Arabia
advertisement

Prediction of Rainfall in Saudi Arabia
A THESIS
SUBMITTED TO THE GRADUATE EDUCATIONAL POLCIES COUNCIL
IN PARTIAL FULFILLMENT OF THE REQUIREMENTS
For the degree
MASTER OF SCIENCE
By
Hadi Obaid M Alshammari
Adviser Dr. Rahmatullah Imon
Ball State University
Muncie, Indiana
May 2015
ACKNOWLEDGEMENTS
I would like to gratefully and sincerely thank my supervisor Professor Dr. Rahmatullah Imon for
the patient guidance, encouragement and advice he has provided throughout my time as his
student. I have been extremely lucky to have a supervisor who cared so much about my work,
and who responded to my questions and queries so promptly. His mentorship was paramount in
providing a well-rounded experience consistent my long-term career goals. For everything
you’ve done for me Dr. Imon, thank you. I would like also to thank the rest of my thesis
committee: Dr. Rich Stankewitz and Dr. Yayuan Xiao for their encouragement, insightful
comments and patience.
Finally, I would like to thank my family: my mother, my brothers and sisters, for supporting me
throughout my life.
Hadi Obaid M Alshammari
March, 30, 2015
Table of Contents
4
CHAPTER 1
INTRODUCTION
1.1 Saudi Arabia Climate Data
1.2 Outline of the Study
4
5
10
12
CHAPTER 2
ESTIMATION OF MISSING VALUES IN SAUDI ARABIA CLIMATE DATA
2.1 Imputation Methods
12
2.2 Expectation Maximization Algorithm
14
2.3 Estimation with Trend Models
15
2.4 Estimation with Smoothing Techniques
17
2.5 Robust Methods
18
2.6 Nonparametric Bootstrap
21
2.7 Estimation of Missing Values for Saudi Arabia Climate Data
24
2.8 Trend of Climate Data for Saudi Arabia
32
CHAPTER 3
MODELING AND FITTING OF DATA USING REGRESSION AND MEDIATION METHODS
34
34
3.1 Classical Regression Analysis
34
3.2 Mediation
42
3.3 Accuracy Measures
43
3.4 A Comparison of Regression and Mediation Fits for Gizan
45
48
CHAPTER 4
FORECASTNG WITH ARIMA MODELS
48
4.1 The Box-Jenkins Methodology
48
4.2 Stationary and Nonstationary Time Series
49
4.3 Test for Significance of a White Noise Autocorrelation Function
52
4.4 ARIMA Models
54
4.5 Estimation and Specification of ARIMA Models
60
4.6 Diagnostic Checking
62
4.7 Computing a Forecast
63
4.8 Fitting of the ARIMA Model to Saudi Arabia Rainfall Data
69
CHAPTER 5
79
EVALUATION OF FORECASTS BY REGRESSION, MEDIATION AND ARIMA
MODELS
77
5.1 Cross Validation in Regression and Time Series Models
79
5.2 Evaluation of Forecasts for Rainfall Data
81
CHAPTER 6
CONCLUSIONS AND AREAS OF FUTURE RESEARCH
86
86
6.1 Conclusions
86
6.2 Areas of Future Research
87
REFERENCES
88
APPENDIX A
91
Saudi Arabia Climate Data
List of Tables
Chapter 2
Table 2.1: Trend of Complete Climate Data for Saudi Arabia
32
Chapter 3
Table 3.1: Actual and Predicted Fits of Rainfall for Gizan
45
Table 3.2: Accuracy Measures for Regression and Mediation Fits of Rainfall for Gizan
47
Chapter 4
Table 4.1: Specification of ARIMA Models
62
Table 4.2: ACF and PACF Values of Rainfall Data for Gizan
70
Chapter 5
Table 5.1: Rainfall Forecast for Gizan
82
Table 5.2: MSPE of Regression, Mediation and ARIMA Forecasts of Rainfall for Gizan
83
Table 5.3: Predicted Trend of Rainfall in Saudi Arabia
84
List of Figures
Chapter 1
Figure 1.1 Major Cities of Saudi Arabia
5
Figure 1.2: Time Series Plot of Total Number of Rainy Days in Gizan
7
Figure 1.3: Time Series Plot of Yearly Temperature of Gizan
7
Figure 1.4: Time Series Plot of Maximum Temperature in Gizan
7
Figure 1.5: Time Series Plot of Minimum Temperature in Gizan
8
Figure 1.6: Time Series Plot of Wind Speed in Gizan
8
Figure 1.7: Time Series Plot of Rainfall in Gizan
8
Figure 1.8: Individual Value Plot of Rainy Days vs Rainfall in Gizan
9
Chapter 2
Figure 2.1: Time Series Plot of Total Number of Rainy Days in Gizan with Complete Data
26
Figure 2.2: Time Series Plot of Yearly Temperature of Gizan with Complete Data
27
Figure 2.3: Time Series Plot of Maximum Temperature in Gizan with Complete Data
28
Figure 2.4: Time Series Plot of Minimum Temperature in Gizan with Complete Data
29
Figure 2.5: Time Series Plot of Wind Speed in Gizan with Complete Data
30
Figure 2.6: Time Series Plot of Rainfall in Gizan with Complete Data
31
1
Chapter 3
Figure 3.1: Normal Probability Plot of Rainfall vs Rainy Days in Gizan
40
Figure 3.2: Normal Probability Plot of Rainfall vs Different Climate Variables in Gizan
41
Figure 3.3: Time Series Plot of Original and Predicted Rainfall for Gizan
41
Figure 3.4: Regression vs Mediation Analysis
43
Figure 3.5: Time Series Plot of Actual and Predicted Fits of Rainfall for Gizan
46
Chapter 4
Figure 4.1: ACF and PACF of Rainfall Data for Gizan
70
Figure 4.2: ACF and PACF of Rainfall Data for Hail
70
Figure 4.3: ACF and PACF of Rainfall Data for Abha
71
Figure 4.4: ACF and PACF of Rainfall Data for Al Ahsa
71
Figure 4.5: ACF and PACF of Rainfall Data for Al Baha
71
Figure 4.6: ACF and PACF of Rainfall Data for Arar
72
Figure 4.7: ACF and PACF of Rainfall Data for Buriedah
72
Figure 4.8: ACF and PACF of Rainfall Data for Dahran
72
Figure 4.9: ACF and PACF of Rainfall Data for Jeddah
73
Figure 4.10: ACF and PACF of Rainfall Data for Khamis Mashit
73
Figure 4.11: ACF and PACF of Rainfall Data for Madinah
73
Figure 4.12: ACF and PACF of Rainfall Data for Mecca
74
Figure 4.13: ACF and PACF of Rainfall Data for Quriat
74
2
Figure 4.14: ACF and PACF of Rainfall Data for Rafha
74
Figure 4.15: ACF and PACF of Rainfall Data for Riyadh
75
Figure 4.16: ACF and PACF of Rainfall Data for Sakaka
75
Figure 4.17: ACF and PACF of Rainfall Data for Sharurah
75
Figure 4.18: ACF and PACF of Rainfall Data for Tabuk
76
Figure 4.19: ACF and PACF of Rainfall Data for Taif
76
Figure 4.20: ACF and PACF of Rainfall Data for Turaif
76
Figure 4.21: ACF and PACF of Rainfall Data for Unayzah
77
Figure 4.22: ACF and PACF of Rainfall Data for Wejh
77
Figure 4.23: ACF and PACF of Rainfall Data for Yanbu
77
Figure 4.24: ACF and PACF of Rainfall Data for Bishah
78
Figure 4.25: ACF and PACF of Rainfall Data for Najran
78
Chapter 5
Figure 5.1: Time Series Plot of Rainfall Forecast for Gizan
83
3
CHAPTER 1
INTRODUCTION
Prediction of rainfall is still a huge challenge to the climatologists. It is the most important
component of a climate system. Most of the burning issues of our time like global warming, floods,
draught, heat waves, soil erosion and many other climatic issues are directly related with rainfall.
Every country should have a better understanding and prediction of its weather to avoid
environmental issues in the future. In Saudi Arabia, we have little rain and snow comparing with
other western countries. However, Saudi Arabia has a lot of damages if the weather becomes
rainy or snowy. Since we do not have enough studies regarding environmental issues in Saudi
Arabia, we usually face problems with that. As a desert country, people think that we do not need
to deal seriously with weather damages, but the reality is different. Our government spends a lot
of money to fix the damages which are caused by environmental change. In 2011, Jeddah
Municipality made a session to discuss the causes of environmental issues. “Nowadays, the
environmental change is major problem in Saudi Arabia, and we need to forecast the damages
before it happened”. (Eng. Alzahrani 2011). In this session, all speakers agree that we should
have a lot of studies about our future weather to be able to avoid the problems and damages of it.
In that year (2011), Prince Khaled Al-Feisal employed more than 9 companies to deal with
environmental issues just in Jeddah. (Okaz newspaper, 2011). Saudi Arabia has been suffering
with lots of kinds of environmental issues. Since the population is increasing, the need for
solving these issues becomes very significant. We are interested to study the weather of Saudi
Arabia and its environmental issues. In this study, we will forecast the future rainfall of Saudi
Arabia, and try to know the reasons that cause rainfall. We will employ appropriate statistical
4
models and methods to predict rainfall correctly and also to identify the variables responsible for
rain.
1.1 Saudi Arabia Climate Data
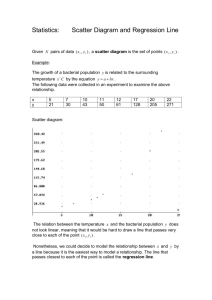
In our study, we would like to consider a variety of climate data that might be useful to predict
the rainfall of Saudi Arabia. A political map of Saudi Arabia is presented in Figure 1.1
Figure 1.1 Major Cities of Saudi Arabia
5
Saudi Arabia is a large country and its climate patterns in different regions are different. For this
reason instead of considering data for the entire Saudi Arabia we consider data from 26 major
cities of this country which are: Gizan, Hail, Madinah, Makkah (Mecca), Najran, Rafha, Riyadh,
Sharurah, Tabuk, Taif, Turaif, Wejh, Yanbo, Abha, Al Baha, Sakaka, Guriat, Arar, Buraydah,
Alqasim (Unayzah), Dahran, Al Ahsa, Khamis, Mushait, Jeddah and Bishah. Initially we have
considered eleven climate variables of Saudi Arabia from year 1986 to 2014. Data are taken from
the Saudi Arabia Presidency of Meteorology and Environment which is available in
http://ww2.pme.gov.sa/ which are also presented in Appendix A. The variables we observe here
are
Data
T
Scale of measurement
- Average annual daily temperature
Celsius (°C)
TM - Annual average daily maximum temperature
Celsius (°C)
Tm – Annual Average daily minimum temperature
Celsius (°C)
PP - Rain or snow precipitation total (annual)
(mm)
V - Annual daily average wind speed
Km\h
RA - Number of days with rain
Days
SN - Number of days with snow
Days
TS - Number of days with storm
Days
FG - Number of foggy days
Days
TN - Number of days with tornado
Days
GR - Number of days with hail
Days
6
At first we construct time series plots of six of the most important variables for the city Gizan
and they are shown in Figures 1.2 – 1.7.
Time Series Plot of Rainy Days
35
30
Rainy Days
25
20
15
10
5
1986
1990
1994
1998
2002
2006
2010
2014
Year
Figure 1.2: Time Series Plot of Total Number of Rainy Days (RA) in Gizan
Time Series Plot of Temp
31.25
31.00
Temp
30.75
30.50
30.25
30.00
29.75
29.50
1986
1990
1994
1998
2002
2006
2010
2014
Year
Figure 1.3: Time Series Plot of Yearly Temperature (T) of Gizan
7
Time Series Plot of Temp_Max
36.25
36.00
Temp_Max
35.75
35.50
35.25
35.00
34.75
34.50
1986
1990
1994
1998
2002
2006
2010
2014
Year
Figure 1.4: Time Series Plot of Maximum Temperature (TM) in Gizan
Time Series Plot of Temp_Min
27.0
Temp_Min
26.5
26.0
25.5
25.0
1986
1990
1994
1998
2002
2006
2010
2014
Year
Figure 1.5: Time Series Plot of Minimum Temperature (Tm) in Gizan
Time Series Plot of Wind Speed
14
Wind Speed
13
12
11
10
1986
1990
1994
1998
2002
2006
2010
2014
Year
Figure 1.6: Time Series Plot of Wind Speed (V) in Gizan
8
Time Series Plot of Rainfall
350
300
Rainfall
250
200
150
100
50
0
1986
1990
1994
1998
2002
2006
2010
2014
Year
Figure 1.7: Time Series Plot of Rainfall (PP) in Gizan
The time series plots of the variables reveal several interesting features of time series. For each
variable the information for the year 2005 is missing. This is not only the case with Gizan, for all
other 25 cities we observe the same situation. We also observe that the yearly average
temperature and minimum temperature trend up. The number of rainy days and the maximum
temperature show slight decreasing trend. The average wind speed shows a decreasing pattern
and then tends to increase. The total amount of rainfall shows slightly decreasing pattern
although it is surprising to see that on many years there is zero amount of rainfall whereas there
are quite a few rainy days on those years. Certainly it cannot be right. To investigate this issue a
bit further we consider a one-way ANOVA test for the difference in the number of rainy days
among the days when we have no rain and enough rain and the MINITAB output and boxplot
and individual value plot are given below. Here no reported rainfall days are categorized by 0
and the reported rainfall days are categorized by 1.
9
Individual Value Plot of Rainy Days vs Rainfall
35
30
Rainy Days
25
20
15
10
5
0
1
Rainfall
Figure 1.8: Individual Value Plot of Rainy Days (RA) vs Rainfall (PP) in Gizan
One-way ANOVA: Rainy Days versus Rainfall
Source
Rain
Error
Total
DF
1
27
28
S = 5.636
Level
0
1
N
10
19
SS
36.9
857.6
894.6
MS
36.9
31.8
R-Sq = 4.13%
Mean
13.100
15.474
StDev
4.433
6.150
F
1.16
P
0.291
R-Sq(adj) = 0.58%
Individual 95% CIs For Mean Based on
Pooled StDev
--+---------+---------+---------+------(-------------*--------------)
(----------*----------)
--+---------+---------+---------+------10.0
12.5
15.0
17.5
The above MINITAB output for one way analysis of variance (ANOVA) between reported no
rainfall days and rainfall days show that the difference of total amount of rainfall on those two
types of days are not statistically significant. This table contains sum of squares (SS), degrees of
freedom (DF), mean squares (MS), the F statistic and its associated p-value for rainfall over
rainy days. The p-value for the test statistic F is 0.291 (much above the cut-off value 0.05) shows
that the difference is not significant. The 95% confidence interval for no rainfall has a huge
overlap with the 95% confidence interval of rainfall days and hence they are not separated at the
5% level of significance. But practically it is simply impossible to believe that the total number
10
of days when the total rainfall is zero is statistically insignificant with the number of day where
there was high rainfall. We need to address this issue later on.
1.2 Outline of the Study
Here is the outline of my thesis. In Chapter 2, we introduce different methodologies we use in
our research that include the estimation of missing values that include a robust and bootstrap
expectation minimization (EM) algorithm. We also study the trend of variables in this section. In
Chapter 3 we employ regression and mediation methods for the prediction of rainfall in different
parts of Saudi Arabia. Fitting and forecasting of data using ARIMA models are discussed in
Chapter 4. In order to determine the most appropriate ARIMA model we employed both
graphical methods based on the autocorrelation function (ACF) and the partial autocorrelation
function and numerical tests such as the t-test and the Ljung-Box test based on the ACF and the
PACF. We report a cross validation in Chapter 5 which is designed to investigate which of the
regression, mediation and ARIMA models can generate better forecasts of rainfall in Saudi
Arabia. We also report the future trend of rainfall in different regions of Saudi Arabia.
11
CHAPTER 2
ESTIMATION OF MISSING VALUES IN SAUDI ARABIA
CLIMATE DATA
We have observed in Section 1.1 that each climate variable of Saudi Arabia has a missing
observation in it. Missing data are a part of almost all research and it has a negative influence on
the analysis, such as information loss and, as a result, a loss of efficiency, loss of unbiasedness of
estimated parameters and loss of power. An excellent review of different aspects of missing
values is available in Little and Rubin (2002) and Alshammari (2015). In this section we
introduce a few commonly used missing values estimation techniques which are popular with
statisticians.
2.1 Imputation Methods
In this section we will discuss a couple of imputation techniques for estimating missing values.
2.1.1 Mean Imputation Technique
Among the different methods for solving the missing value, Imputation methods (Little and
Rubin (2002)) is one of the most widely used techniques to solve incomplete data problems.
Therefore, this study stresses several imputation methods to determine the best methods to
replace missing data.
Let us consider n observations x1 , x2 ,..., xn together with m missing values denoted
by x1* , x2* ,..., xm* . Thus the total number of observed data with missing values is n + m given as
12
x1 , x2 ,..., xn1 , x1* , xn1 1 , xn1 2 ,..., xn2 , x2* , xn2 1 , xn2 2 ,..., xm* ,......., xn
.
(2.1)
Therefore, the first missing value occurs after n1 observations, the second missing value occurs
after n 2 total observations, and so on. Note that there might be more than one consecutive
missing observation.
Mean-before Technique
The mean-before technique is one of the most popular imputation techniques in handling missing
data. This technique consists of substituting all missing values with the mean of observed data
since the last missing data point. Thus for the data in (2.1), x1* will be replaced by
x1
1 n1
xi
n1 i 1
(2.2)
and x 2* will be replaced by
x2
n2
1
xi
(n2 n1 1) i n1 1
(2.3)
and so on.
Mean-before-after Technique
The mean-before-after technique substitutes all missing values with the mean of one observed
datum before the missing value and one observed datum after the missing value. Thus for the
data in (2.1), x1* will be replaced by
x1
x n1 x n1 1
(2.4)
2
and x 2* will be replaced by
13
x2
x n2 x n2 1
(2.5)
2
and so on.
2.1.2 Median Imputation Technique
Since mean is highly sensitive to extreme observations and/or outliers, median imputation is
becoming more popular now-a-days [Mamun (2014)]. Instead of mean the missing value for a
data set given in (2.1), the missing value is estimated by the median. For example, for the median
before technique, x1* in (2.2) and x 2* in (2.3) will be replaced by their respective sample medians
and so on.
2.2
Expectation Maximization Algorithm
Let y be an incomplete (containing few missing observations) data vector, e.g., as in (2.1), whose
density function is f ( y; ) where is a p-dimensional parameter. If y were complete, the
maximum likelihood of would be based on the distribution of y. The log-likelihood function of
y, log L( y; ) l ( y; ) log f ( y; ) where l = Log L is required to be maximized. As y is
incomplete we may denote it as ( yobs , y mis ) where y obs is the observed data and y mis is the
unobserved missing data. Let us assume that the missing data is missing by random, then for
some functions f 1 and f 2 :
f ( y, ) f ( yobs , y mis ; ) f1 ( yobs ; ) f 2 ( y mis | yobs ; ) .
(2.6)
Considering the log-likelihood function, we see
lobs ( ; yobs ) l ( ; y) log f 2 ( y mis | yobs ; ).
(2.7)
The EM algorithm is focused on maximizing l ( ; y) in each iteration by replacing it by its
14
conditional expectation given the observed data y obs . The EM algorithm has an E-step
(estimation step) followed by an M-step (maximization step) as follows:
E-step: Compute Q( ; (t ) ) where
Q( ; (t ) ) E ( t ) [l ( ; y) | yobs ].
(2.8)
for the t-th iteration and E stands for expectation.
M-step: Find (t 1) such that
Q( (t 1) ; (t ) ) ≥ Q( ; (t ) ) .
(2.9)
The E-step and M-step are repeated alternately until the difference L( (t 1) ) L( (t ) ) is less than
, where is a small quantity.
If the convergence attribute of the likelihood function of the complete data, that is L( ; y) , is
attainable, then convergence of EM algorithm also attainable. The rate of convergence depends
on the number of missing observations. Dempster, Laird, and Rubin (1977) show that
convergence is linear with rate proportional to the fraction of information about in l ( ; y) that
is observed.
2.3
Estimation with Trend Models
The missing value estimation techniques discussed above are designed for independent
observations. But in regression or in time series we assume a model and that should have a
consideration when we try to estimate missing values. In time series things are even more
challenging as the observations are dependent. Here we consider several commonly used missing
value technique useful for time series.
15
We begin with simple models that can be used to forecast a time series on the basis of its
past behavior. Most of the series we encounter are not continuous in time, instead, they consist of
discrete observations made at regular intervals of time. We denote the values of a time series by
{ y t }, t = 1, 2, …, T. Our objective is to model the series y t and use that model to forecast y t
beyond the last observation yT . We denote the forecast l periods ahead by yˆ T l .
We sometimes can describe a time series y t by using a trend model defined as
yt TR t t
(2.10)
where TR t is the trend in time period t.
2.3.1. Linear Trend Model:
TR t 0 1t .
(2.11)
for constants 0 and 1 .
We can predict y t by
yˆ t ˆ0 ˆ1t
.
(2.12)
2.3.2. Polynomial Trend Model of Order p
TR t 0 1t 2 t 2 ... p t p
(2.13)
for constant coefficients. We can predict y t by
ŷt ˆ0 ˆ1t ˆ2t 2 ... ˆ pt p
.
(2.14)
2.3.3. Exponential Trend Model:
The exponential trend model, which is often referred to a growth curve model, is defined as
16
y t 0 1 t .
t
(2.15)
If 0 > 0 and 1 > 0, applying a logarithmic transformation to the above model yields
y t 0 1 t t
*
*
*
*
(2.16)
where yt ln yt , 0 ln 0 , 1* ln 1 and t ln t .
*
*
*
2.4 Estimation with Smoothing Techniques
Several decomposition and smoothing techniques are available in the literature for estimating the
missing value of time series data.
2.4.1. Moving Average
Moving average is a technique of updating averages by dropping the earliest observation and
adding the latest observation of a series. Let us suppose we have T = nL observations, where L is
the number of seasons, then the first moving average computed for that season is obtained as
y1 y1 y 2 ... y L / L .
(2.17)
The second moving average is obtained as
y2 y2 ... y L y L1 / L y1 y L1 y1 / L .
(2.18)
In general, the m-th moving average is obtained as
y m y m1 y m L1 y m1 / L
.
(2.19)
2.4.2. Centered Moving Average
Instead of the moving average we often use the centered moving average (CMA) which is the
average of two successive moving average values.
17
Some other useful smoothing techniques that can be used for estimating the missing values in
time series are exponentially weighted moving average (EWMA) and the Holt-Winter model.
We can use these methods to estimate the missing values by taking moving average of 5 to 10
neighboring data points around the missing observation.
2.5
Robust Methods
Robust procedures are nearly as efficient as the classical procedure when classical assumptions
hold strictly but are considerably more efficient overall when there is a small departure from
them. The main application of robust techniques in a time series problem is to try to devise
estimators that are not strongly affected by outliers or departures from the assumed model. A
large body of literature is now available [Rousseuw and Leroy (1987), Maronna, Martin, and Yohai
(2006), Hadi, Imon and Werner (2009)] for robust techniques that are readily applicable in linear
regression or in time series.
2.5.1. Least Median of Squares
Rousseeuw (1984) proposed the Least Median of Squares (LMS) method which is a fitting technique
less sensitive to outliers than the OLS. In the OLS, we estimate parameters by minimizing the sum of
n
squared residuals
u
t 1
2
t
which is obviously the same if we minimize the mean of squared residuals
1 n 2
1 n 2
.
Sample
means
are
sensitive
to
outliers,
but
medians
are
not.
Hence
to
make
u
t
ut less
n t 1
n t 1
sensitive we can replace the mean by a median to obtain median sum of squared residuals
2
MSR ( ˆ ) = Median { uˆ t }.
18
(2.20)
Then the LMS estimate of is the value that minimizes MSR ( ˆ ). Rousseeuw and Leroy (1987)
have shown that LMS estimates are very robust with respect to outliers.
2.5.2. Least Trimmed Squares
The least trimmed (sum of) squares (LTS) estimator is proposed by Rousseeuw (1984). Here we
arbitrarily trim a certain amount of extreme observations from both tails of the data. Let us assume that
we have trimmed 100 % observations and h is the remaining number of observations after trimming.
In this method we try to estimate in such a way that
h
2
LTS ( ˆ ) = Minimize uˆ t ,
(2.21)
t 1
where ût is the t-th ordered residual. For a trimming percentage of , Rousseeuw and Leroy (1987)
suggested choosing the number of observations h based on which the model is fitted as h = [n (1 – )]
+ 1. The advantage of using LTS over LMS is that, in the LMS we always fit the regression line based
on roughly 50% of the data, but in the LTS we can control the level of trimming. When we suspect that
the data contains nearly 10% outliers, the LTS with 10% trimming will certainly produce better result
than the LMS. We can increase the level of trimming if we suspect there are more outliers in the data.
2.5.3. M – estimator
Huber (1973) generalized the estimation of parameters by considering a class of estimators, which
chooses to
n
n
Minimize i Minimize yi xi
i 1
i 1
T
(2.22)
where is a symmetric function less sensitive to outliers than squares. An estimator of this type is
called an M – estimator, where M stands for maximum likelihood. It is easy to see from (2.22) that the
function is related to the likelihood function for an appropriate choice of an error distribution. For
19
example if the error distribution is normal, then z z 2 / 2 , –∞ < z < ∞, which also yields the OLS
estimator. The M – estimator obtained from (2.22) is not scale invariant. To obtain a scale invariant
version of this estimator we solve
n
y i xi T
i
.
Minimize Minimize
i 1
i 1
n
(2.23)
In most of the practical applications, the value of is unknown and it is usually estimated before
solving equation (2.22). A popular choice of is
~ = MAD (normalized)
where MAD stands for the median absolute deviation. To minimize (2.22), we have to equate the first
partial derivatives of w.r.t. for j = 0, 1, …, p to zero, yielding a necessary condition for a
minimum. This gives a system of k = p + 1 equations
y i xi T
= 0,
xij
~
i 1
n
j = 0, 1, …, p
(2.24)
where . In general the function is nonlinear and (2.24) must be solved by iterative methods.
2.5.4. S – estimator
Rouusseeuw and Yohai (1984) suggested another class of robust estimator based on the minimization
of the dispersion of the residuals:
ˆ 1 ,
ˆ 2 , ...,
ˆ n
s
The above dispersion is defined as the solution of in a way that
1 n
ˆ i / s K
n i 1
(2.25)
K is often put equal to E where is the standard normal. The function must satisfy the
following conditions: is symmetric and continuously differentiable and (0) = 0. The estimator
20
thus obtained is called an S – estimator because it is derived from a scale statistic in an implicit way. In
fact s given in the above estimating equation is an M – estimator of scale.
2.5.5. MM – estimator
The MM – estimator was originally proposed by Yohai (1987). The objective was to produce a robust
point estimator that maintained good efficiency. The MM – estimator has three stages:
The initial estimate is an S – estimate, so it is fairly robust.
The second stage computed an M – estimate of the error standard deviation using the residuals
from the initial S – estimate.
The last step is an M – estimate of the parameters using a hard redescending weight function to
put a very small (often zero) weight to sufficiently large residuals.
In an extensive performance evaluation of several robust regression estimators, Simpson and
Montgomery (1998) report that MM –estimators have high efficiency and work well in most outlier
scenarios.
2.6
Nonparametric Bootstrap
Nonparametric methods have recently been very popular to statisticians because they do not require
standard assumptions to hold where the reality is otherwise. Among the nonparametric techniques the
bootstrap technique proposed by Efron (1979) has become extremely popular with statisticians.
In this procedure one can create a huge number of sub-samples from a pre-observed data set by a
simple random sampling with replacement. These sub-samples could be later used to investigate the
nature of the population without having any assumption about the population itself.
There are several forms of the bootstrap, and additionally, several other resampling methods
that are related to it, such as jackknifing, cross-validation, randomization tests, and permutation
21
tests. Suppose that we draw a sample S= x1 , x2 ,..., xn from a population P= x1 , x2 ,..., x N
imagine further at least for the time being, that N is very much larger than n, and that S is either a
simple random or an independent random sample, from P. Now suppose that we are interested in
some statistic T = t(S) as an estimate of the corresponding population parameter θ = t(P). Again,
θ could be a vector of parameters and T the corresponding vector of estimates, but for simplicity
assumes that θ is scalar. A traditional approach to statistical inference is to make assumptions
about the structure of the population (e.g., an assumption of normality), and along with the
stipulation of random sampling, to use these assumptions to derive the sampling distribution of
T, on which classical inference is based. In certain instances, the exact distribution of T may be
intractable and so we instead derive its asymptotic distribution. This familiar approach has two
potentially important deficiencies:
1. If the assumptions about the population are wrong, then the corresponding sampling
distribution of the statistic may be seriously inaccurate. On the other hand, if asymptotic
results are relied upon these may not hold to the required level of accuracy in a relatively
small sample.
2. The approach requires sufficient mathematical process to derive the sampling distribution
of the statistic of interest. In some cases, such a derivation may be prohibitively difficult.
In contrast, the nonparametric bootstrap allows us to estimate the sampling distribution of a
statistic which is empirical in nature. That means this statistic is obtained from a data without
making any assumptions about the form of the population of that data, without deriving the
sampling distribution explicitly. The essential idea of the nonparametric bootstrap is as follows:
We proceed to draw a sample of size n from among the elements of S, sampling with
*
*,
, x12
..., x1*n } . It is necessary to sample
replacement. Call the resulting bootstrap sample S1* {x11
22
with replacement, because we would otherwise simply reproduce the sample S. In effect, we are
treating the S as an estimate of the population P; that is, each element Xi of S is selected for the
bootstrap sample with probability 1/n, mimicking the original selection of the sample S from the
population P. We repeat this procedure a large number of times, B selecting many bootstrap
*
samples; the bth such bootstrap sample is denoted S b* {xb*1 , xb*2 ,..., xbn
} .The basic hypothesis is
this: representative and sufficient resample from the original sample would contain information
about the original population as the original sample does represent the population.
In the real world, an unknown distribution F has given the observed data S= x1 , x2 ,..., xn
by random sampling. We calculate a statistic of interest T = t(S). In the bootstrap world, the
*
empirical distribution F̂ gives bootstrap samples Sb* {xb*1 , xb*2 ,..., xbn
} by random sampling from
which we calculate bootstrap replications of the statistic of interest, Tb t ( Sb ) . The big
*
*
advantage of the bootstrap world is that we can calculate as many replications of Tb* as we want
or at least as many as we can afford. Next, we compute the statistic T for each of the bootstrap
samples; that is Tb t ( S b ) . Then the distribution of Tb* around the original estimate T is
*
*
analogous to the sampling distribution of the estimator T around the population parameter θ. For
B
example the average of the bootstrapped statistics, T * Eˆ * (T * )
average of the bootstrap statistics; then
Bia sˆ* T * T is
T
b 1
B
*
b
. Estimate of the
an estimate of the bias of T.
*
Similarly, the estimated bootstrap variance of T, Vˆ * (T * ) (Tb T * ) 2 /( B 1) , that estimates
the sampling variance of T. The random selection of bootstrap samples is not an essential aspect
of the nonparametric bootstrap. At least in principle, we could enumerate all bootstrap samples
23
of size n. Then we could calculate E * (T * ) and V * (T * ) exactly, rather than having to estimate
them. The number of bootstrap samples, however, is astronomically large unless n is tiny. There
are, therefore two sources of error in bootstrap inference: (a) the error induced by using a
particular sample S to represent the population; (b) the sampling error produce by failing to
estimate all bootstrap samples. Making the number of bootstrap replications B sufficiently large
can control the latter sources of error.
How large should we take B, the number of bootstrap replications uses to evaluate
different estimates. The possible bootstrap replications is B = nn. To estimate the standard error
we usually use the number of bootstrap replications to be between 25 to 250. But for other
estimates such as confidence interval or a regression estimate, B is much bigger. We may
increase B if T= t (S) a very complicated function of X to increasing variability. Bootstrap
replications depend on the value of X, if n ≤ 100 we generally replicate B ≤ 10000.
Here are two rules of thumb gathered from Efron and Tibshirani's experience
Even a small number of bootstrap replications, say B = 25, is usually informative. B = 50
is often enough to give a good estimate of standard error.
Very seldom are more than B = 200 replications needed for estimating a standard error
For estimating a standard error, the number B will ordinarily be in the range 25-2000. Much
bigger values of B are required for bootstrap confidence interval, cross-validation, randomization
tests and permutation test. Some other suggestions are also available in the literature [see Efron
(1987), Hall (1992), Booth and Sarker (1998)] about the number of replications needed in
bootstrap.
24
2.7 Estimation of Missing Values for Saudi Arabia Climate Data
In order to find the best method for estimating the missing values in time series such as the
number of road accidents in Saudi Arabia, Alshammari (2015) considered the following
methods:
Mean Imputation
Median Imputation
Linear Trend Model
Quadratic Trend Model
Exponential Trend Model
Centered Moving Average
EM-OLS
EM-LTS
EM-LMS
EM-M
EM-MM
BOOT-OLS
BOOT-LTS
BOOT-LMS
BOOT-M
BOOT-MM
According to Alshammari (2015), the expectation minimization algorithm based on the robust
MM estimator (EM-MM) method performs the best in estimating the missing values. We
25
followed his suggestion and estimate missing values for each of the variable for each city by the
EM-MM method. Here we present a graphical display of estimated values in a time series plot
for six important variables in Gizan. It is worth mentioning that we have looked at the graphical
displays for all 26 cities as reported in Table 2.1 but they are not presented here because of
brevity.
Time Series Plot of Rainy Days
35
30
Rainy Days
25
20
15
10
5
1986
1990
1994
1998
2002
2006
2010
2014
Year
Time Series Plot of Rainy Days
35
30
Rainy Days
25
20
15
10
5
1986
1990
1994
1998
2002
2006
2010
2014
Year
Figure 2.1: Time Series Plot of Total Number of Rainy Days in Gizan with Complete Data
26
Time Series Plot of Temp
31.25
31.00
Temp
30.75
30.50
30.25
30.00
29.75
29.50
1986
1990
1994
1998
2002
2006
2010
2006
2010
2014
Year
Time Series Plot of Temp
31.25
31.00
Temp
30.75
30.50
30.25
30.00
29.75
29.50
1986
1990
1994
1998
2002
2014
Year
Figure 2.2: Time Series Plot of Yearly Temperature of Gizan with Complete Data
27
Time Series Plot of Temp_Max
36.25
36.00
Temp_Max
35.75
35.50
35.25
35.00
34.75
34.50
1986
1990
1994
1998
2002
2006
2010
2014
2010
2014
Year
Time Series Plot of Temp_Max
36.25
36.00
Temp_Max
35.75
35.50
35.25
35.00
34.75
34.50
1986
1990
1994
1998
2002
2006
Year
Figure 2.3: Time Series Plot of Maximum Temperature in Gizan with Complete Data
28
Time Series Plot of Temp_Min
27.0
Temp_Min
26.5
26.0
25.5
25.0
1986
1990
1994
1998
2002
2006
2010
2014
2010
2014
Year
Time Series Plot of Temp_Min
27.0
Temp_Min
26.5
26.0
25.5
25.0
1986
1990
1994
1998
2002
2006
Year
Figure 2.4: Time Series Plot of Minimum Temperature in Gizan with Complete Data
29
Time Series Plot of Wind Speed
14
Wind Speed
13
12
11
10
1986
1990
1994
1998
2002
2006
2010
2014
2010
2014
Year
Time Series Plot of Wind Speed
14
Wind Speed
13
12
11
10
1986
1990
1994
1998
2002
2006
Year
Figure 2.5: Time Series Plot of Wind Speed in Gizan with Complete Data
30
Time Series Plot of Rainfall
350
300
Rainfall
250
200
150
100
50
0
1986
1990
1994
1998
2002
2006
2010
2014
2006
2010
2014
Year
Time Series Plot of Rainfall
350
300
Rainfall
250
200
150
100
50
0
1986
1990
1994
1998
2002
Year
Figure 2.6: Time Series Plot of Rainfall in Gizan with Complete Data
The above plots show that the EM-MM method yields pretty good estimates of the missing
values since they are quite consistent with their previous and next observations.
31
2.8 Trend of Climate Data for Saudi Arabia
We have just mentioned that we estimated missing values of climate data for the year 2005 for
all 25 major cities in Saudi Arabia but for brevity we are not presenting all of them. The
following table gives a summary of our findings for all 25 cities. This table presents the trends of
six most important climate variables for studying rainfall such as rainy days, yearly average
temperature, maximum temperature, minimum temperature, wind speed and total amount of rain
fall after the estimation the estimation of missing values.
Table 2.1: Trend of Complete Climate Data for Saudi Arabia
City
Rainy Days
Temp (Y) Temp (Max) Temp (Min)
Wind Speed
Rainfall
Gizan
Decrease
Increase
Decrease
Increase
Decrease
Decrease
Hail
Decrease
Increase
Increase
Increase
Increase
Increase
Madinah
Decrease
Increase
Increase
Increase
Decrease
Increase
Makkah
Increase
Increase
Increase
Increase
Decrease
Decrease
Najran
Decrease
Increase
Increase
Increase
Decrease
Decrease
Rafha
Decrease
Increase
Increase
Increase
Decrease
Decrease
Riyadh
Decrease
Increase
Increase
Increase
Decrease
Decrease
Sharurah
Decrease
Increase
Increase
Increase
Increase
Decrease
Tabuk
Decrease
Increase
Increase
Increase
Increase
Decrease
Taif
Decrease
Increase
Increase
Increase
Increase
Increase
Turaif
Decrease
Increase
Increase
Increase
Increase
Decrease
Wejh
Decrease
Increase
Increase
Increase
Decrease
Increase
Yanbo
Decrease
Increase
Increase
Increase
Decrease
Decrease
32
Abha
Decrease
Increase
Decrease
Decrease
Al Baha
Decrease
Increase
Increase
Increase
Decrease
Decrease
Sakaka
Decrease
Increase
Increase
Increase
Decrease
Decrease
Guriat
Decrease
Decrease
Decrease
Arar
Decrease
Increase
Increase
Increase
Increase
Increase
Buraydah
Decrease
Increase
Increase
Increase
Decrease
Decrease
Alqasim
Decrease
Increase
Increase
Increase
Decrease
Decrease
Dahran
Decrease
Increase
Increase
Increase
Increase
Decrease
Al Ahsa
Increase
Increase
Increase
Increase
Decrease
Increase
Khamis
Decrease
Increase
Increase
Increase
Increase
Decrease
Jeddah
Decrease
Increase
Increase
Increase
Decrease
Increase
Bishah
Decrease
Decrease
Decrease
Increase
Increase
Increase
Decrease
Decrease
33
Increase
Increase
Increase
CHAPTER 3
MODELING AND FITTING OF DATA USING REGRESSION
AND MEDIATION METHODS
In this chapter at first we discuss different classical, robust and nonparametric methods
commonly used in regression and later use them for the revenue and expenditure data of Saudi
Arabia.
3.1 Classical Regression Analysis
Regression is probably the most popular and commonly used statistical method in all branches of
knowledge. It is a conceptually simple method for investigating functional relationships among
variables. The user of regression analysis attempts to discern the relationship between a
dependent (response) variable and one or more independent (explanatory/predictor/regressor)
variables. Regression can be used to predict the value of a response variable from knowledge of
the values of one or more explanatory variables.
To describe this situation formally, we define a simple linear regression model
Yi X i ui
(3.1)
where Y is a random variable, X is a fixed (nonstochastic) variable and u is a random error term
whose value is based on an underlying probability distribution (usually normal). For every value
X there exists a probability distribution of u and therefore a probability distribution of the Y’s.
We can now fully specify the two-variable linear regression model as given in (3.1) by listing its
important assumptions.
1. The relationship between Y and X is linear.
34
2. The X’s are nonstochastic variables whose values are fixed.
3. Each error ui has zero expected values: E( ui )= 0
4. The error term has constant variance for all observations, i.e.,
E( u i ) = 2 , i = 1, 2, …, n.
2
5. The random variables u i are statistically independent. Thus,
E( u i u j ) = 0, for all i j.
6. Each error term is normally distributed.
3.1.1 Tests of Regression Coefficients, Analysis of Variance and Goodness of
Fit
We often like to establish that the explanatory variable X has a significant effect on Y, that the
coefficient of X (which is ) is significant. In this situation the null hypothesis is constructed in
way that makes its rejection possible. We begin with a null hypothesis, which usually states that
a certain effect is not present, i.e., = 0. We estimate by ˆ and the standard error of ˆ
denoted by s ˆ from the data and compute the statistic
t=
ˆ
~ t n2 .
s ˆ
(3.2)
which means the statistic t follows a t distribution with n – 2 degrees of freedom. Residuals can
provide a useful measure of the fit between the estimated regression line and the data. A good
regression equation is one which helps explain a large proportion of the variance of Y. Large
residuals imply a poor fit, while small residuals imply a good fit. The problem with using the
residuals as a measure of goodness of fit is that its value depends on the units of the dependent
35
variable. For this we require a unit-free measure for the goodness of fit. Thus the total variation
of Y (usually known as total sum of squares TSS) can be decomposed into two parts: the residual
variation of Y (error sum of squares ESS) and the explained variation of Y (regression sum of
squares RSS). To standardize, we divide both sides of the equation
TSS = ESS + RSS
by TSS to obtain
1=
ESS
RSS
+
.
TSS
TSS
We define the R – squared ( R 2 ) of the regression equation as
R2 =
RSS
ESS
=1–
.
TSS
TSS
(3.3)
Thus R 2 is the proportion of the total variation in Y explained by the regression of Y on X. It is
easy to show that R 2 ranges in value between 0 and 1. But it is only a descriptive statistics.
Roughly speaking, we associate a high value of R 2 (close to 1) with a good fit of the model by
the regression line and associate a low value of R 2 (close to 0) with a poor fit. How large must
R 2 be for the regression equation to be useful? That depends upon the area of application. If we
could develop a regression equation to predict the stock market, we would be ecstatic if R 2 =
0.50. On the other hand, if we were predicting death in a road accident, we would want the
prediction equation to have strong predictive ability, since the consequences of poor prediction
could be quite serious.
It is often useful to summarize the decomposition of the variation in Y in terms of an
analysis of variance (ANOVA). In such a case the total explained and unexplained variations in
Y are converted into variances by dividing by the appropriate degrees of freedom. This helps us
to develop a formal procedure to test the goodness of fit by the regression line. Initially we set
36
the null hypothesis that the fit is not good. In other words, our hypothesis is that the overall
regression is not significant in a sense that the explanatory variable is not able to explain the
response variable in a satisfactory way.
ANOVA Table for a Two Variable Regression Model
Components
Sum of Squares
Degrees of freedom
Mean SS
F statistic
Regression
RSS
1
RSS/1 = RMS
RMS/EMS~ F1,n 2
Error
ESS
n–2
ESS/(n –2) = EMS
Total
TSS
n–1
Here we compute the mean sum of squares for both regression (RMS) and error (ESS) by
dividing RSS and ESS by their respective degrees of freedom as shown in column 4 of the above
ANOVA table. Finally we compute the ratio RMS / EMS which follows an F distribution with 1
and n – 2 degrees of freedom (which is also a square of a t distribution with n – 2 d. f.). If the
calculated value of this ratio is greater than F1, n 2,0.05 , we reject the null hypothesis and conclude
that the overall regression is significant at the 5% level of significance.
3.1.2. Regression Diagnostics and Tests for Normality
Diagnostics are designed to find problems with the assumptions of any statistical procedure. In a
diagnostic approach we estimate the parameters by the classical method (the OLS) and then see
whether there is any violation of assumptions and/or irregularity in the results regarding the six
standard assumptions mentioned at the beginning of this section. But among them the
assumption of normality is the most important assumption.
The normality assumption means the errors are distributed as normal. The simplest
graphical display for checking normality in regression analysis is the normal probability plot.
37
This method is based in the fact that if the ordered residuals are plotted against their cumulative
probabilities on normal probability paper, the resulting points should lie approximately on a
straight line. An excellent review of different analytical tests for normality is available in Imon
(2003). A test based on the correlation of true observations and the expectation of normalized
order statistics is known as the Shapiro – Wilk test. A test based on an empirical distribution
function is known as the Anderson – Darling test. It is often very useful to test whether a given
data set approximates a normal distribution. This can be evaluated informally by checking to see
whether the mean and the median are nearly equal, whether the skewness is approximately zero,
and whether the kurtosis is close to 3. Skewness and kurtosis are measures of skewed and peaked
behavior of a population respectively. The commonly used measures of skewness and peakness
are S
3
2
3
and K
4
where k E[ X E ( X )]k is called the k-th central moment of the
4
2
random variable X. When the data come from a normal population with expectation and
variance 2 , then the standard results show that 3 = 0 and 4 3 4 which yield S = 0 and K
= 3. For samples, we can estimate k by mk
1 n
x x k where x is the sample mean for a
n i 1
m3
sample of size n. Then the coefficients of skewness and kurtosis are estimated by Sˆ
and
3
m2
m
Kˆ 44 . Thus a more formal test for normality is given by the Jarque – Bera statistic:
m2
JB = [n / 6] [ Sˆ 2 ( Kˆ 3) 2 / 4]
(3.4)
Imon (2003) suggests a slight adjustment to the JB statistic to make it more suitable for the
regression problems. His proposed statistic based on rescaled moments (RM) of ordinary least
squares residuals is defined as
38
RM = [n c 3 / 6] [ Sˆ 2 c ( Kˆ 3) 2 / 4]
(3.5)
where c = n/(n – p), p is the number of independent variables in a regression model. Both the JB
and the RM statistic follow a chi square distribution with 2 degrees of freedom. If the values of
these statistics are greater than the critical value of the chi square, we reject the null hypothesis
of normality.
Here we report a regression analysis for Gizan. We try to predict rainfall. At first we fit
the total amount of rainfall on the number of rainy days. Our common sense tells us that there
must be a very strong linear relationship here, but because of too many strange values in the
rainfall the data relationship does not turn out that strong. The MINITAB output of this analysis
is given below. We observe from this output that although the number of rainy days has a
significant impact on rainfall as the p-value is 0.016, the R 2 of this fit is only 19.7%.
Regression Analysis: Rainfall versus Rainy Days
The regression equation is
Rainfall = - 56.1 + 7.48 Rainy Days
Predictor
Constant
Rainy Days
Coef
-56.14
7.480
S = 86.9938
SE Coef
45.58
2.909
R-Sq = 19.7%
T
-1.23
2.57
P
0.229
0.016
R-Sq(adj) = 16.7%
Analysis of Variance
Source
Regression
Residual Error
Total
DF
1
27
28
SS
50053
204334
254387
MS
50053
7568
F
6.61
P
0.016
The normal probability plot as shown in Figure 3.1 clearly shows a nonnormal pattern
and the corresponding RM statistic has p-value 0.003.
39
Normal Probability Plot
(response is Rainfall)
99
95
90
Percent
80
70
60
50
40
30
20
10
5
1
-200
-100
0
100
200
300
Residual
Figure 3.1: Normal Probability Plot of Rainfall vs Rainy Days in Gizan
When we include a few more explanatory variables such as temperature, maximum temperature,
minimum temperature and wind speed, the fit improves a bit. The R 2 value goes up to 54.6%
and the normal probability plot (see Figure 3.2) shows a better normality pattern. The p-value of
the RM statistic is 0.765.
Regression Analysis: Rainfall versus Rainy Days, Temp, ...
The regression equation is
Rainfall = 1933 + 6.57 Rainy Days + 118 Temp - 92.4 Temp_Max - 97.6 Temp_Min
+ 21.1 Wind Speed
Predictor
Constant
Rainy Days
Temp
Temp_Max
Temp_Min
Wind Speed
Coef
1933
6.575
118.43
-92.45
-97.60
21.10
S = 70.8575
SE Coef
1648
2.565
84.63
39.58
55.44
12.53
R-Sq = 54.6%
T
1.17
2.56
1.40
-2.34
-1.76
1.68
P
0.253
0.017
0.175
0.029
0.092
0.106
R-Sq(adj) = 44.7%
Analysis of Variance
Source
Regression
Residual Error
Total
DF
5
23
28
Source
Rainy Days
Temp
Seq SS
50053
14986
DF
1
1
SS
138909
115478
254387
MS
27782
5021
F
5.53
P
0.002
40
Temp_Max
Temp_Min
Wind Speed
1
1
1
19635
39996
14239
Normal Probability Plot
(response is Rainfall)
99
95
90
Percent
80
70
60
50
40
30
20
10
5
1
-150
-100
-50
0
50
Residual
100
150
200
Figure 3.2: Normal Probability Plot of Rainfall (PP) vs Different Climate Variables in Gizan
But we are not entirely happy with this fit. Figure 3.3 gives the fitted values of rainfall together
with the original values. We observe from this plot that for 8 years we predict negative amount
of rainfall which cannot be true.
Scatterplot of Rainfall, Fitted Rainfall vs Year
350
Variable
Rainfall
Fitted Rainfall
300
250
Y-Data
200
150
100
50
0
-50
1985
1990
1995
2000
Year
2005
2010
2015
Figure 3.3: Time Series Plot of Original and Predicted Rainfall (PP) for Gizan
41
We see similar pattern in rainfall data for other regions of Saudi Arabia and the details results are
omitted for brevity.
3.2 Mediation
We have already observed some strange behavior of rainfall data for different parts in Saudi
Arabia. In many years the total amounts of rainfall are zero although there are quite a few rainy
days there. It clearly indicates something is wrong with the data. When there are 30 to 40 rainy
days in a year, the total amount of rainfall cannot be zero. Probably the corresponding data are
missing and in the data sheet they wrongly type those as zeroes. In such a situation a regression
model can fail to predict rainfall. But we have seen in the previous section that the number of
rainy days has a high correlation with the total amount of rainfall and we can also establish a
significant linear relationship between them. Since the total number of rainy days data is
complete we can use that information to predict or forecast rainfall by an indirect regression
approach. Indirect regression is popularly known as mediation in the regression literature.
In statistics, a mediation model is one that seeks to identify and explicate the mechanism or
process that underlies an observed relationship between an explanatory (independent) variable
and a response (dependent) variable via the inclusion of a third explanatory variable, known as a
mediator variable. The mediation method was first proposed by Baron and Kenny (1986) and
then developed by many authors. An excellent review of mediation technique is available in
Montgomery et al. (2014). Rather than hypothesizing a direct causal relationship between the
independent variable and the dependent variable, a mediational model hypothesizes that the
independent variable influences the mediator variable, which in turn influences the dependent
variable. Thus, the mediator variable serves to clarify the nature of the relationship between the
42
independent and dependent variables. In other words, mediating relationships occur when a third
variable plays an important role in governing the relationship between the other two variables.
Figure 3.4: Regression vs Mediation Analysis
Figure 3.4 gives a visual representation of the overall mediating relationship to be explained.
Mediation analyses are employed to understand a known relationship by exploring the
underlying mechanism or process by which one variable (X) influences another variable (Y)
through a mediator (M). For example, suppose a cause X affects a variable (Y) presumably
through some intermediate process (M). In other words X leads to M which leads to Y. In our
study we assume that the climate variables will lead to the number of rainy days and that will
lead to total amount of rainfall. Thus, the number of rainy days has become an intervening
variable which is called a mediator.
3.3 Accuracy Measures
When several methods are available for fitting or predicting a regression or time series, we need
to find some kind of accuracy measures for comparison of the goodness of fit. For a regular
regression and/or time series three measures of accuracy of the fitted model: MAPE, MAD, and
43
MSD are very commonly used. For all three measures, the smaller the value, the better the fit of
the model. Use these statistics to compare the fits of the different methods.
3.3.1. MAPE
Mean absolute percentage error (MAPE) measures the accuracy of fitted time series values. It
expresses accuracy as a percentage.
MAPE =
| y
yˆt / yt |
t
T
100
(3.6)
where yt equals the actual value, ŷt equals the fitted value, and T equals the number of
observations.
3.3.2. MAD
MAD stands for mean absolute deviation, measures the accuracy of fitted time series values. It
expresses accuracy in the same units as the data, which helps conceptualize the amount of error.
MAD =
| y
t
yˆt |
T
(3.7)
where yt equals the actual value, ŷt equals the fitted value, and T equals the number of
observations.
3.3.3. MSD
Mean squared deviation (MSD) is always computed using the same denominator, T, regardless
of the model, so we can compare MSD values across models. MSD is a more sensitive measure
of an unusually large forecast error than MAD.
MSD =
y
yˆt
2
t
T
44
(3.8)
where yt equals the actual value, ŷt equals the fitted value, and T equals the number of
observations.
3.4 A Comparison of Regression and Mediation Fits for Gizan
To offer a comparison between regression and mediation methods in fitting the rainfall data, we
fit the data by both methods and the results of the fitted values together with the actual rainfall
values are presented in Table 3.1. It is worth mentioning that we employed the ordinary least
squares method to compute the regression fits. Here the response variable is total amount of
rainfall and the explanatory variables are temperature, maximum temperature, minimum
temperature, number of rainy days and wind speed. For the mediation values at first we predict
the mediator variable total number of rainy days by temperature, maximum and minimum
temperature and wind speed and then obtain the predicted rainfall as
Predicted rainfall = Predicted number of rainy days × average rainfall per day
Table 3.1: Actual and Predicted Fits of Rainfall for Gizan
Year
1986
1987
1988
1989
1990
1991
1992
1993
1994
1995
1996
1997
1998
Rainfall
0.00
0.00
0.00
28.96
53.09
0.00
318.77
310.89
2.03
113.80
257.05
48.01
2.03
Regression
44.283
8.429
-38.270
-7.876
42.723
48.151
256.727
219.078
96.859
184.732
89.395
87.237
81.041
45
Mediation
16.100
17.120
14.940
15.930
53.140
48.151
256.727
309.800
56.320
184.732
210.236
87.237
39.876
1999
2000
2001
2002
2003
2004
2005
2006
2007
2008
2009
2010
2011
2012
2013
2014
0.00
0.00
0.00
0.00
0.00
12.95
46.70
10.20
9.80
9.15
9.15
9.80
10.20
91.70
206.78
0.00
10.041
26.527
27.865
-15.492
-40.160
-1.602
44.897
77.789
85.927
2.663
-9.468
48.110
-0.415
99.371
39.181
43.317
10.041
26.527
27.865
15.234
16.132
14.768
44.897
34.935
55.673
2.663
12.254
15.897
16.944
99.371
134.143
55.045
Scatterplot of Rainfall, Regression, Mediation vs Year
350
Variable
Rainfall
Regression
Mediation
300
250
Y-Data
200
150
100
50
0
-50
1985
1990
1995
2000
Year
2005
2010
2015
Figure 3.5: Time Series Plot of Actual and Predicted Fits of Rainfall (PP) for Gizan
A graphical display of this data in terms of a time series plot is presented in Figure 3.5. This
graph clearly shows that the mediation method is fitting the data better than the regression
method for this data.
46
Table 3.2: Accuracy Measures for Regression and Mediation Fits of Rainfall for Gizan
Measures
Regression
Mediation
MAPE
228.50
68.34
MAD
47.06
25.84
MSD
3930.88
1156.93
Finally we compute the accuracy measures MAPE, MAD and MSD for the fitted values obtained
by regression and mediation methods and present them in Table 3.2. This table clearly shows
that all three accuracy measures for mediation are much less than their corresponding regression
results. Thus we may conclude that there exists empirical evidence which shows mediation
method can fit the rainfall data of Gizan better than regression methods.
47
CHAPTER 4
FORECASTNG WITH ARIMA MODELS
In this chapter we discuss different aspects of data analysis techniques useful in time series
analysis. Here the prime topic of our discussion will be ARIMA models. We will talk about
fitting of a model and generating forecasts using ARIMA models. An excellent review of
different aspects of stochastic time series modelling is available in Pyndick and Rubenfield
(1998), Bowerman et al. (2005) and Imon (2015). We assume that the time series models have
been generated by a stochastic process. In other words, we assume that each value y1 , y 2 , …,
yT in the series is randomly drawn from a probability distribution. We could assume that the
observed series y1 , y 2 , …, yT is drawn from a set of jointly distributed random variables. If we
could specify the probability distribution function of our series, we could determine the
probability of one or another future outcome. Unfortunately, the complete specification of the
probability distribution function for a time series is usually impossible. However, it usually is
possible to construct a simplified model of the time series which explains its randomness in a
manner that is useful for forecasting purposes.
4.1 The Box-Jenkins Methodology
The Box-Jenkins methodology consists of a four-step iterative procedure.
Step 1: Tentative Identification: Historical data are used to tentatively identify an appropriate
Box-Jenkins model.
Step 2: Estimation: Historical data are used to estimate the parameters of tentatively identified
model.
48
Step 3: Diagnostic Checking: Various diagnostics are used to check the adequacy of the
tentatively identified model and, if need be, to suggest an improved model, which is then
regarded as a new tentatively identified model.
Step 4: Forecasting: Once a final model is obtained, it is used to forecast future time series
values.
4.2 Stationary and Nonstationary Time Series
It is important to know whether the stochastic process that generates the series can be assumed to
be invariant with respect to time. If the characteristic of the stochastic process changes over time
we call the process nonstationary. If the process is nonstationary, it will often be difficult to
represent the time series over past and future intervals of time by a simple algebraic model. By
contrast, if the process is stationary, one can model the process via an equation with fixed
coefficients that can be estimated from past data.
Properties of Stationary Process
We have said that any stochastic time series y1 , y 2 , …, yT can be thought of as having been
generated by a set of jointly distributed random variables; i.e., the set of data points y1 , y 2 , …,
yT represents a particular outcome (also known as a realization) of the joint probability
distribution function p( y1 , y 2 , …, yT ). Similarly, a future observation yT 1 can be thought of
as being generated by a conditional probability distribution function
p( yT 1 | y1 , y 2 , …, yT )
(4.1)
that is, a probability distribution for yT 1 given the past observations y1 , y 2 , …, yT . We define
a stationary process, then, as one whose joint distribution and conditional distribution both are
invariant with respect to displacement in time. In other words, if the series is stationary, then
49
p( y t , y t 1 , …, y t k ) = p( yt m , yt m1 , …, yt m k )
and
p( y t ) = p( yt m )
(4.2)
for any t, k, and m.
If the series y t is stationary, the mean of the series, which is defined as
y = E( y t )
(4.3)
must also be stationary, so that E( y t ) = E( yt m ), for any two different time period t and m.
Furthermore, the variance of the series
y 2 = E[( y t – y )] 2
(4.4)
must be stationary, so that
E[( y t – y )] 2 = E[( yt m – y )] 2 .
(4.5)
Finally, for any lag k, the covariance of the series
k = Cov ( y t , y t k ) = E[( y t – y ) ( y t k – y )]
(4.6)
must be stationary, so that Cov ( y t , y t k ) = Cov ( yt m , yt m k ).
If a stochastic process is stationary, the probability distribution p( y t ) is the same for all
time t and its shape can be inferred by looking at the histogram of the observations y1 , y 2 , …,
yT . An estimate of the mean y can be obtained from the sample mean
T
y =
y
t 1
t
/T
(4.7)
and an estimate of the variance y can be obtained from the sample variance
2
50
ˆ y 2 =
T
y
t 1
y / T.
2
t
(4.8)
Usually it is very difficult to get a complete description of a stochastic process. The
autocorrelation function could be extremely useful because it provides a partial description of the
process for modeling purposes. The autocorrelation function tells us how much correlation there
is between neighboring data points in the series y t . We define the autocorrelation with lag k as
k
Cov y t , y t k
V yt V yt k
(4.9)
For a stationary time series the variance at time t is the same as the variance at time t + k; thus
from (4.6) the autocorrelation becomes
k
k
k
0
y2
(4.10)
where 0 = Cov ( y t , y t ) = E[( y t – y ) ( y t – y )] = y2 and thus 0 = 1 for any stochastic
process.
Suppose the stochastic process is simply
y t t
where t is an independently distributed random variable with zero mean. Then it is easy to
show that for this process, 0 = 1 and k = 0 for k > 0. This particular process is known as
white noise, and there is no model that can provide a forecast any better than yˆ T l = 0 for all l.
Thus, if the autocorrelation function is zero (or close to zero) for all k > 0, there is little or no
value in using a model to forecast the series.
51
4.3 Test for Significance of a White Noise Autocorrelation Function
In practice, we use an estimate of the autocorrelation function, called the sample autocorrelation
(SAC) function
T k
rk
y
t 1
t
y y t k y
T
y
t 1
t
y
(4.11)
2
It is easy to see from their definitions that both the theoretical and the estimated autocorrelation
functions are symmetrical; i.e., k = k and rk = r k .
4.3.1. Bartlett’s test
Here the null hypothesis is H 0 : k = 0 for k > 0. Bartlett shows that when the time series is
generated by a white noise process, the sample autocorrelation function is distributed
approximately as a normal with mean 0 and variance 1/T. Hence, the test statistic is
|z| =
T | rk |
(4.12)
and we reject the null hypothesis at the 95% level of significance, if |z| is greater than 1.96.
4.3.2. The t-test based on SAC
The standard error of rk is given by
1/ T
k 1
SE rk
2
1
2
ri / T
i 1
if k 1
if k 1
.
(4.13)
The t-statistic for testing the hypothesis H 0 : k = 0 for k > 0 is defined as
T = rk /SE( rk )
(4.14)
52
and this test is significant when |T| > 2.
4.3.3. Box and Pierce Test and Ljung and Box Test
To test the joint hypothesis that all the autocorrelation coefficients are zero we use a test statistic
introduced by Box and Pierce (1970). Here the null hypothesis is
H 0 : 1 = 2 = … = k = 0.
Box and Pierce show that the appropriate statistic for testing this null hypothesis is
k
Q=T
r
i 1
2
(4.15)
i
is distributed as chi-square with k degrees of freedom.
A slight modification of the Box-Pierce test was suggested by Ljuang and Box (1978),
which is known as the Ljuang-Box Q (LBQ) test defined as
k
Q T (T 2) (T k ) 1 ri
2
i 1
.
(4.16)
Thus, if the calculated value of Q is greater than, say, the critical 5% level, we can be 95% sure
that the true autocorrelation coefficients are not all zero.
4.3.4. Stationarity and the Autocorrelation Function
How can we decide whether a series is stationary or determine the appropriate number of times a
homogenous nonstationary series should be differenced to arrive at a stationary series? The
correlogram (a plot of autocorrelation coefficients against the number of lag periods) could be a
useful indicator of it. For a stationary series, the autocorrelation function drops off as k becomes
large, but this usually is not the case for a nonstationary series. In order to employ the BoxJenkins methodology, we must examine the behavior of the SAC. The SAC for a nonseasonal
53
time series can display a variety of behaviors. First, the SAC for a nonseasonal time series can
cut off at lag k. We say that a spike at lag k exists in the SAC if the SAC at lag k is statistically
significant. Second, we say that the SAC dies down if this function does not cut-off but rather
decreases in a steady fashion. In general, it can be said that
1. If the SAC of the time series values either cuts off fairly quickly or dies down fairly
quickly, then the time series values should be considered stationary.
2. If the SAC of the time series values dies down extremely slowly, then the time series
values should be considered nonstationary.
4.4 ARIMA Models
In this section we introduce some commonly used stochastic time series models which are
popularly known as integrated autoregressive moving average (ARIMA) models.
4.4.1. White Noise
The simplest example of a stochastic time series is the white noise. Here the response y t is
determined by just by the noise or errors as
y t = t
(4.17)
with E( t ) = 0 and E( t s ) = 0 for t s. In the ARIMA version this model can be denoted as
ARIMA (0,0,0).
54
4.4.2. Moving Average Models
In the moving average process of order q each observation y t is generated by a weighted average
of random disturbances going back to q periods. We denote this process as MA(q) and write its
equation as
y t = t 1 t 1 2 t 2 ... q t q
(4.18)
.
In the moving average model the random disturbances are assumed to be independently
distributed across time, i.e., generated by a white noise process. In particular, each t is
assumed to be normal random variable with mean 0 and variance , and covariance k = 0 for
2
k 0. We have E( y t ) = which shows that a moving average process is independent of time.
The process MA(q) is described by exactly q + 2 parameters, the mean , the disturbance
2
and the parameters 1 , 2 ,..., q .
Let us now look at the variance of the moving average process of order q. We observe from (4.6)
that
2
0 = E yt
(4.19)
= E( t 1 t 1 2 t 2 ... q t q 21 t t 1 y t 1 – …)
2
2
2
2
2
2
2
2
= (1 + 1 2 ... q )
2
2
2
The moving average process of order q has autocorrelation function
k 1 k 1 2 k 2 ... q k q
2
2
2
k =
1 1 2 ... q
0
55
k 1,2,..., q
kq
.
(4.20)
4.4.3. Autoregressive Models
In the autoregressive process of order p the current observation y t is generated by a weighted
average of past observations going back p periods, together with a random disturbance in the
current period. We denote this process as AR(p) and write its equation as
y t = 1 yt 1 2 yt 2 ... p yt p t
(4.21)
If the autoregressive process is stationary, then its mean, which we denote by , must be
invariant with respect to time; i.e., E( y t ) = E( y t 1 ) = E( y t p ) = for all p. The mean is thus
given by = 1 2 ... p or =
. If the process is stationary,
1 1 2 ... p
then must be finite. For this, it is necessary that 1 2 ... p < 1.
For the first-order process AR(1): y t = 1 yt 1 t ,
k =
k
k
= 1 .
0
(4.22)
In general, for k > 1,
k = E yt k 1 yt 1 2 yt 2 t = 1 k 1 + 2 k 2 .
(4.23)
Thus the autocorrelation function is given by
1 =
1
1 2
(4.24)
k = 1 k 1 + 2 k 2 for k > 1 .
4.4.4. The Partial Autocorrelation Function
The partial autocorrelation function is used to determine the order of an autoregressive process.
For an autoregressive process of order p, the covariance with displacement k is determined from
56
k = E yt k 1 yt 1 2 yt 2 ... p yt p t
(4.25)
which gives
0 = 1 1 + 2 2 + … + p p + 2
1 = 1 0 + 2 1 + … + p p 1
……………………………………
p = 1 p 1 + 2 p 2 + … + p 0 .
(4.26)
The above equations also give a set of p equations, known as Yule-Walker equations, to
determine the first p values of the autocorrelation functions:
1 = 1 + 2 1 + p p 1
………………………………
p = 1 p 1 + 2 p 2 + … + p
(4.27)
The solution of the Yule-Walker equations requires the knowledge of p. Therefore we solve
these equations for successive values of p. We begin by hypothesizing that p = 1. We compute
the sample autocorrelation ˆ1 as an estimate of 1 . If this value is significantly different from 0,
we know that the autoregressive process is at least order 1. Next we consider the hypothesis that
p = 2. We solve the Yule-Walker equations for p = 2 and obtain a new set of estimates for 1
and 2 . If 2 is significantly different from 0, we may conclude that the process is at least order
2. Otherwise we conclude that the process is order 1. We repeat this process for successive
values of p. We call the series 1 , 2 , …, partial autocorrelation function. If the true order of the
process is p, we should observe that ˆ j 0 for j > p. To test whether a particular j is zero, we
can use the fact that it is approximately normally distributed with mean 0 and variance 1 / T.
57
Hence we can check whether it is statistically significant at, say, the 5% level by determining
whether it exceeds 2 /
T in magnitude.
4.4.5. Mixed Autoregressive – Moving Average (ARMA) Models
Many stationary random processes cannot be modeled as a purely moving average or as purely
autoregressive, since they have qualities of both types of processes. In this situation we can use
the mixed autoregressive – moving average (ARMA) process. An ARMA process of order (p, q)
is defined as
y t = 1 yt 1 2 yt 2 ... p yt p t 1 t 1 2 t 2 ... q t q
.
(4.28)
We assume that the process is stationary, then its mean, which we denote by , must be
invariant with respect to time and is given by = 1 2 ... p or
=
For the general ARMA(p, q) process it is not easy to obtain the
1 1 2 ... p .
variances, covariances and autocorrelations by solving equations. It can be shown easily,
however, that
k = 1 k 1 + 2 k 2 + … + p k p , k > q .
(4.29)
It is interesting to note that q is the memory of the moving average part of the process, so that for
k > q, the autocorrelation function exhibits the properties of a purely autoregressive process.
The above equations also give a set of p equations, known as Yule-Walker equations, to
determine the first p values of the autocorrelation functions:
1 = 1 + 2 1 + p p 1
………………………………
p = 1 p 1 + 2 p 2 + … + p
58
(4.30)
The solution of the Yule-Walker equations requires the knowledge of p. Therefore we solve
these equations for successive values of p. We begin by hypothesizing that p = 1. We compute
the sample autocorrelation ˆ1 as an estimate of 1 . If this value is significantly different from 0,
we know that the autoregressive process is at least order 1. Next we consider the hypothesis that
p = 2. We solve the Yule-Walker equations for p = 2 and obtain a new set of estimates for 1
and 2 . If 2 is significantly different from 0, we may conclude that the process is at least order
2. Otherwise we conclude that the process is order 1. We repeat this process for successive
values of p. We call the series 1 , 2 , …, partial autocorrelation function. If the true order of the
process is p, we should observe that ˆ j 0 for j > p.
To test whether a particular j is zero, we can use the fact that it is approximately
normally distributed with mean 0 and variance 1 / T. Hence we can check whether it is
statistically significant at, say, the 5% level by determining whether it exceeds 2 /
T in
magnitude.
4.4.6. Homogenous Nonstationary Processes: ARIMA Models
Probably very few of the time series one meets in practice are stationary. Fortunately, however,
many of the nonstationary time series that are encountered have the desirable property that they
are differenced one or more times, the resulting series will be stationary. Such a nonstationary
series is termed homogenous. The number of times the original series must be differenced before
a stationary series results in is called the order of homogeneity. Thus, if y t is first order
homogenous nonstationary, the series wt = y t – y t 1 = y t is stationary. Here we should
construct models for those nonstationary series, which can be transformed into stationary series
59
by differencing them one or more times. We say that y t is homogenous nonstationary of order d
if
wt d yt
(4.31)
is a stationary series. If wt d yt and wt is an ARMA(p, q) process, then we say that y t is an
integrated autoregressive moving average process of order p, d and q, or simply ARIMA(p, d, q).
4.5 Estimation and Specification of ARIMA Models
It is often convenient to describe time lags by using the backward shift operator B. The operator
B imposes a one-period time lag each time it is applied to a variable. Thus
B t = t 1 , B 2 t = t 2 , …, B n t = t n .
(4.32)
Using this operator, we can write an MA(q) process as:
y t = t 1 1 B 2 B 2 ... q B q = t (B)
(4.33)
In a similar way, the AR(p) process can be rewritten as
yt 1 1 B 2 B 2 ... p B p = t
.
(4.34)
Finally, an ARMA(p, q) process can be reexpressed as
yt 1 1 B 2 B 2 ... p B p = t 1 1 B 2 B 2 ... q B q
.
(4.35)
It is easy to show that any homogenous nonstationary process can be modeled as an ARIMA
process. We can write the equation for an ARIMA(p, d, q) as:
B d y t = B t
(4.36)
B y t = B t
(4.37)
If d = 0, we obtain
60
which is an ARMA(p, q). When q = 0, i.e., when wt d yt is just AR(p), we call y t an
integrated autoregressive process of order (p, d) and denote it as ARIMA(p, d, 0) or ARI(p, d, 0).
When p = 0, i.e., when wt is just MA(q), we call y t an integrated moving average process of
order (d, q) and denote it as ARIMA(0, d, q) or IMA(0, d, q). In practice, it is crucial to specify
the ARIMA model, i.e., to choose the most appropriate values for p, d and q.
Given a series y t , the first problem is to determine the degree of homogeneity d. To do
this one first examines the autocorrelation function of the original series y t and determines
whether it is stationary. If it is not, difference the series and examine the autocorrelation function
for y t . Repeat this process until a value of d is reached such that d yt is stationary, i.e., the
autocorrelation function goes to 0 as k becomes large. After d is determined, one can work with
the stationary series wt d yt and examine both its autocorrelation and partial autocorrelation
function to determine possible specifications for p and q. The lower order processes like AR(1),
AR(2), MA(1), MA(2), ARMA(1, 1) etc are easy to recognize.
The autoregressive and moving average of order p and q respectively are determined by
using the partial autocorrelation function (PACF) and ACF respectively. Table 4.1 summarizes
the characteristics of the ARIMA(p,0,q) or ARMA(p,q) model.
61
Table 4.1: Specification of ARIMA Models
Model
Autocorrelation Function (ACF)
Partial Autocorrelation Function (PACF)
White noise
All zero
All zero
MA(1)
Zero after 1 lag
Declining from 1st lag
MA(2)
Zero after 2 lags
Declining from 2nd lag
MA(q)
Zero after q lags
Declining from qth lag
AR(1)
Geometric decline from 1 lag
Zero after 1 lag
AR(2)
Geometric decline from 2 lags
Zero after 2 lags
AR(p)
Geometric decline from pth lag
Zero after p-lags
ARMA(1,1)
Geometric decline from 1 lag
Declining from first lag
ARMA(p,q)
Geometric decline from pth lag
Declining from qth lag
4.6 Diagnostic Checking
After a time series model has been estimated, one must test whether the specification was
correct. We assume that the random errors t in the actual process are normally distributed and
independent. Then, if the model is specified correctly, the residuals ̂t should resemble a white
noise process. Consequently a sample autocorrelation function of the residuals for n observations
is
n
rˆk
ˆ ˆ
t
t 2
t k
n
2
ˆ t
t 1
62
(4.38)
would be close to 0 for k > 0. We can use the Box and Pierce Test for this purpose. Consider the
statistic Q composed of the first K residual autocorrelations
K
Q=T
rˆ
k 1
2
k
(4.39)
which is distributed as chi-square with K – p – q degrees of freedom.
4.7 Computing a Forecast
In ARIMA models we generate forecasts by the minimum mean-square error method. Here our
objective is to predict future values of a time series. For this reason we consider the optimum
forecast to be that forecast which has the minimum mean square forecast error. Since the forecast
error is a random variable, we minimize the expected value. Thus, we wish to choose our
forecast yˆ T l so that
E [ e 2 T l ] = E {[ yT l – yˆ T l ]} 2
(4.40)
is minimized. It is easy to show that this forecast is given by the conditional expectation of yT l ,
that is, by
yˆ T l = E ( yT l | yT , yT 1 , …, y1 ) .
The computation of the forecast yˆ T l can be done recursively by using the estimated ARIMA
model. This involves first computing a forecast one period ahead, then using this forecast to
compute a forecast two periods ahead, and continuing until the l-period forecast has been
reached.
Let us write the ARIMA(p, d, q) model as
wt = 1 wt 1 + 2 wt 2 + … + p wt p + t – 1 t 1 – … – q t q + .
63
(4.41)
To compute the forecast yˆ T l , we begin by computing the one-period forecast of wt , ŵT (1).
To do so, we write
wT 1 = 1 wT + 2 wT 1 + … + p wT p 1 + T 1 – 1 T – … – q T q 1 + .
(4.42)
We obtain
ŵT (1) = E( wT 1 | wT , ...)
ˆ T q 1 + .
= 1 wT + 2 wT 1 + … + p wT p 1 – 1 ̂T – … – q
(4.43)
Now, using the one-period forecast ŵT (1), we can obtain the second-period forecast ŵT (2):
ˆ T q 2 +
ŵT (2) = 1 ŵT (1) + 2 wT + … + p wT p 2 – 2 ̂T – … – q
(4.44)
Thus the l-period forecast is given by
ŵT (l) = 1 ŵT (l–1) +…+ 1 wT + …+ p wT p l – 1 ̂T – … – q ̂T q l + .
(4.45)
If l > p and l > q, this forecast will be
ŵT (l) = 1 ŵT (l – 1) + … + p ŵT (p – 1) wT p l .
When d = 1, our l-period forecast yˆ T l is given by
yˆ T l = ŵT (1) + ŵT (2) + … + ŵT (l) .
4.7.1. The Forecast Error
We can write the ARIMA (p, d, q) model as
B 1 B d yt = B t
where = 0 and = 1 – B. Therefore,
y t = B
1
1 Bd B t
= (B) t =
j 0
j
t j .
Thus an ARIMA model can be expressed as a purely moving average process of infinite order.
Then
64
yT l = 0 T l + 1 T l 1 + … + l 1 T 1 +
j 0
l j
T j .
The desired forecast yˆ T l can be based only on information available up to time T that gives
yˆ T l =
l j
j 0
T j .
We define the forecast error eT l as
eT l = yT l – yˆ T l = 0 T l + 1 T l 1 + … + l 1 T 1 .
(4.46)
The variance of the forecast error is given by
E( e 2 T l ) = ( 0 + 1 + … + l 1 ) .
2
2
2
2
It is easy to show that
0 = 1.
Therefore, for any ARIMA specification, the forecast error one period ahead is just
eT l = T l .
4.7.2. Forecast Confidence Interval
The estimate of is given by
2
ˆ 2 =
T
2
t
t 1
/ (T – p – q)
(4.47)
Hence the 100 (1 – )% confidence interval around a forecast l periods ahead would be given
by
yˆ T l z 1 / 2 (1 +
l 1
j 1
65
2
j
) 1/ 2 .
(4.48)
4.7.3. White Noise Forecasts
For the white noise model
y t = t
forecasts are generated as
ŷ t = ̂ y .
(4.49)
4.7.4. The AR(1) Process
Let us consider the AR(1) process:
y t = 1 y t 1 + + t
The one-period forecast is
yˆ T 1 = 1 yT + .
The two-period forecast is
2
yˆ T 2 = 1 yˆ T 1 = 1 yT + ( 1 + 1) .
Thus the l-period forecast is
l
l 1
l 2
yˆ T l = 1 yT + ( 1 + 1 + … + 1 + 1) .
As l becomes large, the forecast converges to the value
lim yˆ T l =
l
j 0
= / (1 – 1 ).
j
1
which is the mean of the process. The forecast error is given by
eT l = T l + 1 T l 1 + … + 1 T 1
l 1
which has a variance
E( e 2 T l ) = (1 + 1 + … + 1
2
66
2l 2
) .
2
(4.50)
4.7.5. The MA(1) Process
Let us consider the MA(1) process:
y t = + t – 1 t 1
The one-period forecast is
yˆ T 1 = – 1 ̂T .
The l-period forecast is
yˆ T l = E ( + T l – 1 T l 1 ) =
(4.51)
for l > 1. The forecast error is given by
eT l = T l – 1 T l 1
which has a variance
E( e 2 T l ) = (1 + 1 ) .
2
2
4.7.6. The ARMA(1, 1) Process
An ARMA (1, 1) process is:
y t = + 1 y t 1 + t – 1 t 1
The one-period forecast is
yˆ T 1 = E( 1
yT
+ + T l – 1 T ) = 1 y t 1 + – 1 ̂T .
The two-period forecast is
2
yˆ T 2 = 1 yˆ T 1 + = 1 yT + ( 1 + 1) – 1 1 ̂T .
Finally the l-period forecast is
l
l 1
l 2
l 1
yˆ T l = 1 yT + ( 1 + 1 + … + 1 + 1) – 1 1 ̂T .
67
(4.53)
4.7.7. The ARI(1, 1, 0) Process
Now we examine a simple nonstationary process, the integrated autoregressive process ARI(1, 1,
0):
wt = 1 wt 1 + + t
with wt = y t – y t 1 . Since wt is AR(1), the l-period forecast is
l
l 1
l 2
wˆ T l = 1 wT + ( 1 + 1 + … + 1 + 1) .
We also have
yˆ T l = yT + ŵT (1) + ŵT (2) + … + ŵT (l).
The one-period forecast is
yˆ T 1 = yT + 1 ( yT – yT 1 ) + = (1 + 1 ) yT – 1 yT 1 .
The two-period forecast is
yˆ T 2 = yT + ŵT (1) + ŵT (2) = yˆ T 1 + ŵT (2)
= (1 + 1 ) yT – 1 yT 1 + 1 ( yT – yT 1 ) + ( 1 + 1)
2
= (1 + 1 + 1 ) yT – ( 1 + 1 ) yT 1 + ( 1 + 1) + .
2
2
2
Since wˆ T 2 = 1 wT + ( 1 + 1) = 1 ( 1 wT + ) + = 1 wˆ T 1 + , hence
yˆ T 2 = yˆ T 1 + 1 wˆ T 1 + .
Similarly,
yˆ T l = yˆ T l 1 + 1 wˆ T l 1 + .
The forecast error for one-period is given by
eT 1 = yT 1 – yˆ T 1 = yT + wT 1 – yT – ŵT (1)= T 1 .
68
(4.54)
The two-period forecast error is given by
eT 2 = yT 2 – yˆ T 2 = yT + wT 1 + wT 2 – yT – ŵT (1) – ŵT (2)
= [ wT 1 – ŵT (1)] + [ wT 2 – ŵT (2)] = (1 + 1 ) T 1 + T 2 .
Finally
eT l = (1 + 1 + 1 +…+ 1 ) T 1 + (1 + 1 + 1 +…+ 1
2
l 1
2
l 2
) T 2 +…
+ (1 + 1 ) T l 1 + T l .
This has a variance
l l i j 2
E( e 2 T l ) = 1 .
i 1 j 0
4.8 Fitting of the ARIMA Model to Saudi Arabia Rainfall Data
In our study we try to predict rainfall in different cities of Saudi Arabia. In this section we would
like to employ ARIMA models to fit this variable. In order to determine the order of ARIMA we
compute the ACF, the PACF, and the corresponding t value. We begin with Gizan. Figure 4.1
presents the ACF and the PACF of rainfall of Gizan. We observe that ACF and PACF values of
all order are close to zero so the data should fit a white noise model. Similar remarks may apply
with the ACF and PACF values with the associated t and Ljuang-Box tests as shown in Tables
4.2.
69
Autocorrelation Function for Rainfall
Partial Autocorrelation Function for Rainfall
(with 5% significance limits for the partial autocorrelations)
1.0
1.0
0.8
0.8
0.6
0.6
Partial Autocorrelation
Autocorrelation
(with 5% significance limits for the autocorrelations)
0.4
0.2
0.0
-0.2
-0.4
-0.6
-0.8
0.4
0.2
0.0
-0.2
-0.4
-0.6
-0.8
-1.0
1
2
3
4
Lag
5
6
-1.0
7
1
2
3
4
Lag
5
6
7
Figure 4.1: ACF and PACF of Rainfall Data for Gizan
Table 4.2: ACF and PACF Values of Rainfall Data for Gizan
ACF
TSTAT
LBQ
PACF
TSTAT
0.309823
-0.055817
0.276673
0.130178
-0.197858
-0.224183
-0.182002
1.66845
-0.27532
1.36113
0.60306
-0.90531
-0.99795
-0.78371
3.0820
3.1857
5.8325
6.4419
7.9083
9.8727
11.2263
0.309823
-0.167927
0.397144
-0.174101
-0.113085
-0.253456
-0.129367
1.66845
-0.90432
2.13869
-0.93756
-0.60898
-1.36490
-0.69666
It is worth mentioning that each city in Saudi Arabia shows a similar pattern. For this reason we
present results for Gizan. We also present graphs of ACF and PACF for different cities. The
numerical results are omitted for brevity.
Partial Autocorrelation Function for PP
Autocorrelation Function for PP
(with 5% significance limits for the partial autocorrelations)
1.0
0.8
0.8
0.6
0.6
Partial Autocorrelation
Autocorrelation
(with 5% significance limits for the autocorrelations)
1.0
0.4
0.2
0.0
-0.2
-0.4
-0.6
0.4
0.2
0.0
-0.2
-0.4
-0.6
-0.8
-0.8
-1.0
-1.0
1
2
3
4
5
6
7
1
2
3
Lag
Figure 4.2: ACF and PACF of Rainfall Data for Hail
70
4
Lag
5
6
7
Autocorrelation Function for PP
Partial Autocorrelation Function for PP
(with 5% significance limits for the partial autocorrelations)
1.0
1.0
0.8
0.8
0.6
0.6
Partial Autocorrelation
Autocorrelation
(with 5% significance limits for the autocorrelations)
0.4
0.2
0.0
-0.2
-0.4
-0.6
0.4
0.2
0.0
-0.2
-0.4
-0.6
-0.8
-0.8
-1.0
-1.0
1
2
3
4
5
6
1
7
2
3
4
5
6
7
Lag
Lag
Figure 4.3: ACF and PACF of Rainfall Data for Abha
Partial Autocorrelation Function for PP
Autocorrelation Function for PP
(with 5% significance limits for the partial autocorrelations)
1.0
1.0
0.8
0.8
0.6
0.6
Partial Autocorrelation
Autocorrelation
(with 5% significance limits for the autocorrelations)
0.4
0.2
0.0
-0.2
-0.4
-0.6
0.4
0.2
0.0
-0.2
-0.4
-0.6
-0.8
-0.8
-1.0
-1.0
1
2
3
4
5
6
1
7
2
3
4
5
6
7
Lag
Lag
Autocorrelation Function for PP
Partial Autocorrelation Function for RA
(with 5% significance limits for the autocorrelations)
(with 5% significance limits for the partial autocorrelations)
1.0
1.0
0.8
0.8
0.6
0.6
Partial Autocorrelation
Autocorrelation
Figure 4.4: ACF and PACF of Rainfall Data for Al Ahsa
0.4
0.2
0.0
-0.2
-0.4
-0.6
-0.8
0.4
0.2
0.0
-0.2
-0.4
-0.6
-0.8
-1.0
-1.0
1
2
3
4
5
6
7
1
Lag
2
3
4
Lag
Figure 4.5: ACF and PACF of Rainfall Data for Al Baha
71
5
6
7
Partial Autocorrelation Function for PP
Autocorrelation Function for PP
(with 5% significance limits for the partial autocorrelations)
1.0
1.0
0.8
0.8
0.6
0.6
Partial Autocorrelation
Autocorrelation
(with 5% significance limits for the autocorrelations)
0.4
0.2
0.0
-0.2
-0.4
-0.6
0.4
0.2
0.0
-0.2
-0.4
-0.6
-0.8
-0.8
-1.0
-1.0
1
2
3
4
5
6
1
7
2
3
4
5
6
7
Lag
Lag
Figure 4.6: ACF and PACF of Rainfall Data for Arar
Partial Autocorrelation Function for PP
Autocorrelation Function for PP
(with 5% significance limits for the partial autocorrelations)
1.0
1.0
0.8
0.8
0.6
0.6
Partial Autocorrelation
Autocorrelation
(with 5% significance limits for the autocorrelations)
0.4
0.2
0.0
-0.2
-0.4
-0.6
0.4
0.2
0.0
-0.2
-0.4
-0.6
-0.8
-0.8
-1.0
-1.0
1
2
3
4
5
6
1
7
2
3
4
5
6
7
Lag
Lag
Autocorrelation Function for PP
Partial Autocorrelation Function for PP
(with 5% significance limits for the autocorrelations)
(with 5% significance limits for the partial autocorrelations)
1.0
1.0
0.8
0.8
0.6
0.6
Partial Autocorrelation
Autocorrelation
Figure 4.7: ACF and PACF of Rainfall Data for Buriedah
0.4
0.2
0.0
-0.2
-0.4
-0.6
-0.8
0.4
0.2
0.0
-0.2
-0.4
-0.6
-0.8
-1.0
-1.0
1
2
3
4
5
6
7
1
Lag
2
3
4
Lag
Figure 4.8: ACF and PACF of Rainfall Data for Dahran
72
5
6
7
Partial Autocorrelation Function for PP
(with 5% significance limits for the partial autocorrelations)
1.0
1.0
0.8
0.8
0.6
0.6
Partial Autocorrelation
Autocorrelation
Autocorrelation Function for PP
(with 5% significance limits for the autocorrelations)
0.4
0.2
0.0
-0.2
-0.4
-0.6
-0.8
0.4
0.2
0.0
-0.2
-0.4
-0.6
-0.8
-1.0
-1.0
1
2
3
4
5
6
7
1
2
3
4
Lag
5
6
7
Lag
Autocorrelation Function for PP
Partial Autocorrelation Function for PP
(with 5% significance limits for the autocorrelations)
(with 5% significance limits for the partial autocorrelations)
1.0
0.8
0.8
0.6
0.6
Partial Autocorrelation
1.0
0.4
0.2
0.0
-0.2
-0.4
-0.6
-0.8
0.4
0.2
0.0
-0.2
-0.4
-0.6
-0.8
-1.0
-1.0
1
2
3
4
5
6
7
1
2
3
4
Lag
5
6
7
Lag
Figure 4.10: ACF and PACF of Rainfall Data for Khamis Mashit
Partial Autocorrelation Function for PP
Autocorrelation Function for PP
(with 5% significance limits for the partial autocorrelations)
(with 5% significance limits for the autocorrelations)
1.0
1.0
0.8
0.8
0.6
0.6
Partial Autocorrelation
Autocorrelation
Autocorrelation
Figure 4.9: ACF and PACF of Rainfall Data for Jeddah
0.4
0.2
0.0
-0.2
-0.4
-0.6
0.4
0.2
0.0
-0.2
-0.4
-0.6
-0.8
-0.8
-1.0
-1.0
1
2
3
4
5
6
7
Lag
1
2
3
4
Lag
Figure 4.11: ACF and PACF of Rainfall Data for Madinah
73
5
6
7
Partial Autocorrelation Function for PP
Autocorrelation Function for PP
(with 5% significance limits for the partial autocorrelations)
1.0
1.0
0.8
0.8
0.6
0.6
Partial Autocorrelation
Autocorrelation
(with 5% significance limits for the autocorrelations)
0.4
0.2
0.0
-0.2
-0.4
-0.6
0.4
0.2
0.0
-0.2
-0.4
-0.6
-0.8
-0.8
-1.0
-1.0
1
2
3
4
5
6
1
7
2
3
4
5
6
7
Lag
Lag
Figure 4.12: ACF and PACF of Rainfall Data for Mecca
Partial Autocorrelation Function for PP
Autocorrelation Function for PP
(with 5% significance limits for the partial autocorrelations)
1.0
1.0
0.8
0.8
0.6
0.6
Partial Autocorrelation
Autocorrelation
(with 5% significance limits for the autocorrelations)
0.4
0.2
0.0
-0.2
-0.4
-0.6
0.4
0.2
0.0
-0.2
-0.4
-0.6
-0.8
-0.8
-1.0
-1.0
1
2
3
4
5
6
1
7
2
3
4
5
6
7
Lag
Lag
Figure 4.13: ACF and PACF of Rainfall Data for Quriat
Autocorrelation Function for PP
Partial Autocorrelation Function for PP
(with 5% significance limits for the partial autocorrelations)
1.0
1.0
0.8
0.8
0.6
0.6
Partial Autocorrelation
Autocorrelation
(with 5% significance limits for the autocorrelations)
0.4
0.2
0.0
-0.2
-0.4
-0.6
-0.8
0.4
0.2
0.0
-0.2
-0.4
-0.6
-0.8
-1.0
-1.0
1
2
3
4
5
6
7
1
Lag
2
3
4
Lag
Figure 4.14: ACF and PACF of Rainfall Data for Rafha
74
5
6
7
Partial Autocorrelation Function for PP
Autocorrelation Function for PP
(with 5% significance limits for the partial autocorrelations)
1.0
1.0
0.8
0.8
0.6
0.6
Partial Autocorrelation
Autocorrelation
(with 5% significance limits for the autocorrelations)
0.4
0.2
0.0
-0.2
-0.4
-0.6
0.4
0.2
0.0
-0.2
-0.4
-0.6
-0.8
-0.8
-1.0
-1.0
1
2
3
4
5
6
1
7
2
3
4
5
6
7
Lag
Lag
Figure 4.15: ACF and PACF of Rainfall Data for Riyadh
Partial Autocorrelation Function for PP
Autocorrelation Function for PP
(with 5% significance limits for the partial autocorrelations)
1.0
1.0
0.8
0.8
0.6
0.6
Partial Autocorrelation
Autocorrelation
(with 5% significance limits for the autocorrelations)
0.4
0.2
0.0
-0.2
-0.4
-0.6
0.4
0.2
0.0
-0.2
-0.4
-0.6
-0.8
-0.8
-1.0
-1.0
1
2
3
4
5
6
1
7
2
3
4
5
6
7
Lag
Lag
Figure 4.16: ACF and PACF of Rainfall Data for Sakaka
Autocorrelation Function for PP
Partial Autocorrelation Function for PP
(with 5% significance limits for the partial autocorrelations)
1.0
1.0
0.8
0.8
0.6
0.6
Partial Autocorrelation
Autocorrelation
(with 5% significance limits for the autocorrelations)
0.4
0.2
0.0
-0.2
-0.4
-0.6
0.4
0.2
0.0
-0.2
-0.4
-0.6
-0.8
-0.8
-1.0
-1.0
1
2
3
4
5
6
1
7
2
3
4
Lag
Lag
Figure 4.17: ACF and PACF of Rainfall Data for Sharurah
75
5
6
7
Partial Autocorrelation Function for PP
Autocorrelation Function for PP
(with 5% significance limits for the partial autocorrelations)
1.0
1.0
0.8
0.8
0.6
0.6
Partial Autocorrelation
Autocorrelation
(with 5% significance limits for the autocorrelations)
0.4
0.2
0.0
-0.2
-0.4
-0.6
0.4
0.2
0.0
-0.2
-0.4
-0.6
-0.8
-0.8
-1.0
-1.0
1
2
3
4
5
6
1
7
2
3
4
5
6
7
Lag
Lag
Autocorrelation Function for PP
Partial Autocorrelation Function for PP
(with 5% significance limits for the autocorrelations)
(with 5% significance limits for the partial autocorrelations)
1.0
1.0
0.8
0.8
0.6
0.6
Partial Autocorrelation
Autocorrelation
Figure 4.18: ACF and PACF of Rainfall Data for Tabuk
0.4
0.2
0.0
-0.2
-0.4
-0.6
0.4
0.2
0.0
-0.2
-0.4
-0.6
-0.8
-0.8
-1.0
-1.0
1
2
3
4
5
6
1
7
2
3
4
5
6
7
Lag
Lag
Figure 4.19: ACF and PACF of Rainfall Data for Taif
Partial Autocorrelation Function for PP
Autocorrelation Function for PP
(with 5% significance limits for the partial autocorrelations)
1.0
1.0
0.8
0.8
0.6
0.6
Partial Autocorrelation
Autocorrelation
(with 5% significance limits for the autocorrelations)
0.4
0.2
0.0
-0.2
-0.4
-0.6
0.4
0.2
0.0
-0.2
-0.4
-0.6
-0.8
-0.8
-1.0
-1.0
1
2
3
4
5
6
1
7
2
3
4
Lag
Lag
Figure 4.20: ACF and PACF of Rainfall Data for Turaif
76
5
6
7
Partial Autocorrelation Function for PP
(with 5% significance limits for the partial autocorrelations)
1.0
1.0
0.8
0.8
0.6
0.6
Partial Autocorrelation
Autocorrelation
Autocorrelation Function for PP
(with 5% significance limits for the autocorrelations)
0.4
0.2
0.0
-0.2
-0.4
-0.6
0.4
0.2
0.0
-0.2
-0.4
-0.6
-0.8
-0.8
-1.0
-1.0
1
2
3
4
5
6
1
7
2
3
4
5
6
7
Lag
Lag
Figure 4.21: ACF and PACF of Rainfall Data for Unayzah
Partial Autocorrelation Function for PP
Autocorrelation Function for PP
(with 5% significance limits for the partial autocorrelations)
1.0
1.0
0.8
0.8
0.6
0.6
Partial Autocorrelation
Autocorrelation
(with 5% significance limits for the autocorrelations)
0.4
0.2
0.0
-0.2
-0.4
-0.6
0.4
0.2
0.0
-0.2
-0.4
-0.6
-0.8
-0.8
-1.0
-1.0
1
2
3
4
5
6
1
7
2
3
4
5
6
7
Lag
Lag
Autocorrelation Function for PP
Partial Autocorrelation Function for PP
(with 5% significance limits for the autocorrelations)
(with 5% significance limits for the partial autocorrelations)
1.0
1.0
0.8
0.8
0.6
0.6
Partial Autocorrelation
Autocorrelation
Figure 4.22: ACF and PACF of Rainfall Data for Wejh
0.4
0.2
0.0
-0.2
-0.4
-0.6
0.4
0.2
0.0
-0.2
-0.4
-0.6
-0.8
-0.8
-1.0
-1.0
1
2
3
4
5
6
1
7
2
3
4
Lag
Lag
Figure 4.23: ACF and PACF of Rainfall Data for Yanbu
77
5
6
7
Autocorrelation Function for PP
Partial Autocorrelation Function for PP
(with 5% significance limits for the partial autocorrelations)
1.0
1.0
0.8
0.8
0.6
0.6
Partial Autocorrelation
Autocorrelation
(with 5% significance limits for the autocorrelations)
0.4
0.2
0.0
-0.2
-0.4
-0.6
-0.8
0.4
0.2
0.0
-0.2
-0.4
-0.6
-0.8
-1.0
-1.0
1
2
3
4
5
6
7
1
Lag
2
3
4
5
6
7
Lag
Autocorrelation Function for PP
Partial Autocorrelation Function for PP
(with 5% significance limits for the autocorrelations)
(with 5% significance limits for the partial autocorrelations)
1.0
1.0
0.8
0.8
0.6
0.6
Partial Autocorrelation
Autocorrelation
Figure 4.24: ACF and PACF of Rainfall Data for Bishah
0.4
0.2
0.0
-0.2
-0.4
-0.6
-0.8
0.4
0.2
0.0
-0.2
-0.4
-0.6
-0.8
-1.0
-1.0
1
2
3
4
5
6
7
1
Lag
2
3
4
5
6
7
Lag
Figure 4.25: ACF and PACF of Rainfall Data for Najran
Most of the plots show no evidence of high correlation and partial correlation and for this reason
their corresponding bands look horizontal. For some cities like Al Ahsa, Madinah, Mecca,
Riyadh, Sharurah, Taif and Turaif the bands do not look horizontal because their corresponding
first order correlation values are relatively larger. But they are not statistically significant (the
largest one has p-value 0.073) at the 5% level and do not show geometric declining pattern,
Hence we can conclude that the white noise is the most appropriate ARIMA model for rainfall in
different cities of Saudi Arabia.
78
CHAPTER 5
EVALUATION OF FORECASTS BY REGRESSION,
MEDIATION AND ARIMA MODELS
In this chapter our main objective is to evaluate forecasts made by different regression,
mediation and time series methods. We employ the cross validation technique for doing this.
5.1 Cross Validation in Regression and Time Series Models
Cross-validation is a technique for assessing how the results of a statistical analysis will
generalize to an independent data set. It is mainly used in settings where the goal is prediction,
and one wants to estimate how accurately a predictive model will perform in practice. One round
of cross-validation involves partitioning a sample of data into complementary subsets,
performing the analysis on one subset (called the training set), and validating the analysis on the
other subset (called the validation set or testing set). An excellent review of different types of
cross validation techniques is available in Izenman (2008). Picard and Cook (1984) developed all
the basic fundamentals of applying cross validation techniques in regression and time series.
According to Montgomery et al. (2008), three types of procedures are useful for
validating a regression or time series model.
(i)
Analysis of the model coefficients and predicted values including comparisons with prior
experience, physical theory, and other analytical models or simulation results,
(ii)
Collection of new data with which to investigate the model’s predictive performance,
79
(iii) Data splitting, that is, setting aside some of the original data and using these observations to
investigate the model’s predictive performance. We prefer the data splitting technique for crossvalidation of the fitted model in our study.
In randomly missing data, generally three performance indicators; say, mean absolute
error (MAE), root mean square error (RMSE) and estimated bias (EB) are considered to examine
the accuracy of theses imputation methods. In order to select the best method for estimation of
missing values, the predicted and observed data were compared. The mean absolute error is the
average difference between predicted and actual data values, and is given by
MAE
1
N
N
P O
i 1
i
i
(5.1)
where N is the number of imputations, Pi and Oi are the imputed and observed data points,
respectively. MAE varies from 0 to infinity and perfect fit is obtained when MAE = 0.
The root mean squared error is one of the most commonly used measures and it is computed by
RMSE
1 N
Pi Oi 2 .
N i 1
(5.2)
The smaller the RMSE value, the better is the performance of the model.
The estimated bias is the absolute difference between the observed and the estimated value of the
respective parameters and defined as
EB Oi Ei
(5.3)
where Ei is the estimated value of the parameter that obtained from the imputation methods.
In order to find out the best prediction model we usually leave out say, l observations
aside as holdback period. The size of l is usually 10% to 20% of the original data. Suppose that
80
we tentatively select two models namely, A and B. We fit both the models using (T – l) set of
observations. Then we compute
MSPE A
1 l
2
e Ai
l t 1
(5.4)
for model A and
MSPE B
1 l
2
eBi
l t 1
(5.5)
for model B. Several methods have been devised to determine whether one mean sum of square
prediction error (MSPE) is statistically different from the other. One such popular method of
testing is the F-test approach, where F-statistic is constructed as a ratio between the two MSPEs
keeping the larger MSPE in the numerator of the F-statistic. If the MSPE for model A is larger,
this statistic takes the form:
F
MSPE A
MSPE B
(5.6)
This statistic follows an F distribution with (l , l) degrees of freedom under the null hypothesis of
equal forecasting performance. If the F-test is significant we will choose model B for this data
otherwise, we would conclude that there is little difference in choosing between these two
models.
5.2 Evaluation of Forecasts for Rainfall Data
To evaluate forecasts we carry out an experiment using cross validation. Here we compare three
different methods: regression, mediation and ARIMA model. We have rainfall data for 29 years.
We use 20 of them (roughly two-third) as the training set and left the last 9 observations (onethird) for cross validation. We have produced three sets of results for predicting rainfall, the first
81
one is the regression forecast, the second one is the mediation forecast, and the third one is the
ARIMA forecast. The forecasted values together with the true values for Gizan are given in
Table 5.1 and are also presented in Figure 5.1.
Table 5.1: Rainfall Forecast for Gizan
Year
Original
Regression
Mediation
ARIMA
2006
10.20
77.7891
34.935
59.7
2007
9.80
85.9272
55.673
59.7
2008
9.15
2.6628
2.663
59.7
2009
9.15
-9.4679
12.254
59.7
2010
9.80
48.1100
15.897
59.7
2011
10.20
-0.4147
16.944
59.7
2012
91.70
99.3708
99.371
59.7
2013
206.78
39.1808
134.143
59.7
2014
0
43.3172
55.045
59.7
The above table and the following figure clearly show that the mediation generates better
forecasts. ARIMA forecasts are constants which should not be the case. The regression method
predicts negative rainfall for the year 2009 and 2011 which are simply impossible and in fact
Gizan had 9.20 and 10.15 cm rainfall in those years.
82
Time Series Plot of Original, Regression, Mediation, ARIMA
V ariable
O riginal
Regression
M ediation
A RIM A
200
Data
150
100
50
0
2006
2007
2008
2009
2010
Year
2011
2012
2013
2014
Figure 5.1: Time Series Plot of Rainfall Forecast for Gizan
Table 5.2 offers a comparison regarding the quality of forecasts between regression, mediation
and ARIMA models. Obviously the mediation is the clear cut winner. It possesses the lowest
MSD and MSPE values. Bothe regression and ARIMA forecasts yield very high MSD and
MAPE values and p-values corresponding to the MSPE for both of them are significant at the 5%
level.
Table 5.2: MSPE of Regression, Mediation and ARIMA Forecasts of Rainfall for Gizan
Measures
MSD
MSPE
p-value
Regression
4706
3.777
0.030
Mediation
1246
1.000
0.500
ARIMA
4579
3.675
0.033
83
Now we do the same kind of experiment for each major city of Saudi Arabia. It is worth
mentioning that the mediation performs best for all of the cities and the details results are not
presented for brevity. But we present the summary information regarding which method is
predicting what trend of future rainfall as shown in Table 5.3.
Table 5.3: Predicted Trend of Rainfall in Saudi Arabia
City
Regression
ARIMA
Mediation
Gizan
Decrease
No change
Increase
Hail
Decrease
No change
Increase
Madinah
Decrease
No change
Increase
Makkah
Increase
No change
Increase
Najran
Decrease
No change
Decrease
Rafha
Decrease
No change
Decrease
Riyadh
Decrease
No change
Decrease
Sharurah
Decrease
No change
Increase
Tabuk
Increase
No change
Increase
Taif
Increase
No change
Increase
Turaif
Decrease
No change
Decrease
Wejh
Decrease
No change
Increase
Yanbo
Decrease
No change
Increase
Abha
Increase
No change
Increase
Al Baha
Decrease
No change
Decrease
84
Sakaka
Increase
No change
Increase
Guriat
Increase
No change
Increase
Arar
Increase
No change
Increase
Buraydah
Increase
No change
Increase
Alqasim
Decrease
No change
Increase
Dahran
Decrease
No change
Decrease
Al Ahsa
Increase
No change
Increase
Khamis Mushait
Decrease
No change
Decrease
Jeddah
Decrease
No change
Increase
Bishah
Increase
No change
Increase
.
Table 5.3 reveals an interesting feature regarding the future rainfall pattern in Saudi Arabia.
ARIMA forecasts say it will be remain the same for all cities in future. Regression predicts that
out of 25 cities 10 cities will have more rainfall in future and 15 other cities will have less
rainfall. The mediation technique predicts that 18 cities will have more rainfall than present time
and 7 cities will have less rainfall. Since mediation maintains much better control over prediction
error we will go by this and conclude that Saudi Arabia will have higher rainfall in future.
85
CHAPTER 6
CONCLUSIONS AND AREAS OF
FUTURE RESEARCH
In this chapter we will summarize the findings of our research to draw some conclusions and
outline ideas for our future research.
6.1 Conclusions
Our prime objective was to predict rainfall of Saudi Arabia for the next few years. In order to do
that we considered few climate variables that could possibly determine rainfall. We had a few
missing observations here in our data and we used the EM MM algorithm to estimate those.
After that we employed regression methods to fit the rainfall data and observed that the fits are
not great. ARIMA models also failed to produce good fit for this data. Later we employed the
mediation technique where number of rainy days is used as a mediator for predicting the total
amount rainfall. Our data suggests that mediation produces a much better fit than regression and
ARIMA models for all 25 major cities of Saudi Arabia. Finally we used cross validation to
assess the goodness of forecasts and we observed that mediation yields much better forecasts as
well. From these forecasts we can say that Saudi Arabia will have more rainfall in future. We
predict that 18 out of 25 major cities will have higher rainfall including the holy cities Mecca and
Madinah and only 7 cities will have less rainfall.
86
6.2 Areas of Future Research
In our study we were not able to consider a few important climate variables such as humidity and
evaporation because this information was not available. We would like to predict the rainfall
once again if this information are available. Neural network could be an interesting method to
employ on these data. In the future we would like to extend our research by considering a large
number of alternative methods such as neural networking, clustering and studying volatility of
the series of data.
87
REFERENCES
1.
2.
3.
4.
5.
6
7.
8.
9.
10.
11.
12.
13
14.
15.
16
17.
18.
19.
20.
21.
22
Altman, N.S. (1992). An Introduction to Kernel and Nearest-neighbor Nonparametric
Regression, The American Statistician, 46, pp. 175-185.
Alshammari, A.O.M. (2015). Modeling Motor Accidents in Saudi Arabia (Unpublished
MS Thesis), Department of Mathematical Sciences, Ball State University.
Baron, R. M. and Kenny, D. A. (1986). The Moderator-Mediator Variable Distinction
in Social Psychological Research – Conceptual, Strategic, and Statistical
Considerations, Journal of Personality and Social Psychology, 51, pp. 1173–1182.
Bowerman, B. L., O’Connell, R. T., and Koehler, A. B. (2005). Forecasting, Time
Series, and Regression: An Applied Approach, 4th Ed., Duxbury Publishing, Thomson
Books/Cole, New Jersey.
Box, G. E. P. and Pierce, D. A. (1970). Distribution of Residual Autocorrelations in
Autoregressive-Integrated Moving Average Time Series Models, Journal of the
American Statistical Association, 65, pp. 1509-1526.
Cleveland, W.S. (1979), Robust locally weighted regression and smoothing scatterplots,
Journal of the American Statistical Association, 74, pp. 829-836.
Hadi, A.S., Imon, A.H.M.R. and Werner, M. (2009). Detection of outliers, Wiley
Interdisciplinary Reviews: Computational Statistics, 1, pp. 57 – 70.
Hastie, T. and Tibshirani, R. (1987). Analysis of Categorical Data, Wiley, New York.
Hampel, F.R., Ronchetti, E.M., Rousseeuw, P.J. and Stahel, W. (1986). Robust
Statistics: The Approach Based on Influence Function, Wiley, New York.
Huber, P.J. (1973). Robust Regression: Asymptotics, Conjectures, and Monte Carlo,
The Annals of Statistics, 1, pp. 799-821.
Imon, A. H. M. R. (2003). Regression Residuals, Moments, and Their Use in Tests for
Normality, Communications in Statistics—Theory and Methods, 32, pp. 1021 – 1034.
Izenman, A.J. (2008), Modern Multivariate Statistical Techniques: Regression,
Classification, and Manifold Learning, Springer, New York.
Kadane, J.B. (1984). Robustness of Bayesian Analysis, Elsevier North-Holland,
Amsterdam.
Ljung, G. M. and Box, G. E. P. (1978), .On a Measure of a Lack of Fit in Time Series
Models, Biometrika, 65, pp. 297–303.
Maronna, R.A., Martin, R.D. and Yohai, V.J. (2006), Robust Statistics: Theory and
Methods, Wiley, New York.
Ministry of Finance, Government of Saudi Arabia, www,mof.gov.sa
Picard, R. and Cook, R.D. (1984), Cross-Validation of Regression Models, Journal of
the American Statistical Association, 79, pp. 575–583.
Pindyck, R. S. and Rubenfeld, D. L. (1998), Econometric Models and Economic
Forecasts, 4th Ed. Irwin/McGraw-Hill Boston.
Rousseeuw, P.J. (1984). Least Median of Squares Regression, Journal of the American
Statistical Association, 79, pp. 871 – 880.
Rousseeuw, P.J. and Leroy, A.M. (1987). Robust Regression and Outlier Detection, Wiley,
New York.
Rousseeuw, P.J. and Leroy, A.M. (1987). A Fast Algorithm for S-Regression Estimates,
Journal of Computational and Graphical Statistics, 15, pp. 414–427.
Silverman, B.W. (1985), Some Aspects of the Spline Smoothing Approach to Non88
parametric Regression Curve Fitting, Journal of the Royal Statistical Society. Series B,
47, pp. 1-52.
23. Simpson, J.R. and Montgomery, D.C. (1998). A Robust Regression Technique Using
Compound Estimation, Naval Research Logistics (NRL), 45, pp. 125–139.
24. Yohai, V. (1987). High Breakdown-Point and High Efficiency Robust Estimates for
Regression, The Annals of Statistics, 15, pp. 642-656.
89
APPENDIX A
Saudi Arabia Climate Data
Variables:
Data
T - Average annual temperature
TM - Annual average maximum temperature
Tm – Annual Average minimum temperature
PP - Rain or snow precipitation total annual
V - Annual average wind speed
RA - Number of days with rain
SN - Number of days with snow
TS - Number of days with storm
FG - Number of foggy days
TN - Number of days with tornado
GR - Number of days with hail
City: Gizan
Year
T
Scale of measurement
Celsius (°C)
Celsius (°C)
Celsius (°C)
(mm)
Km\h
Days
Days
Days
Days
Days
Days
TM
Tm
PP
V
RA
SN
TS
FG
TN
GR
1986
30.1
35.7
25.9
0.00
10.9
22
0
19
1
0
0
1987
1988
1989
1990
1991
1992
1993
1994
1995
30.4
30.5
30.2
30.2
30.3
29.5
30.0
30.1
30.4
35.7
36.2
36.2
36.1
35.6
34.4
34.5
35.1
35.5
26.1
26.0
25.5
25.3
25.5
25.4
25.6
25.7
25.1
0.00
0.00
28.96
53.09
0.00
318.77
310.89
2.03
113.80
10.0
10.2
10.7
10.8
11.1
12.9
13.1
14.2
14.1
17
13
14
17
11
33
22
8
13
0
0
0
0
0
0
2
1
1
19
21
13
9
11
26
27
14
13
0
0
1
5
0
0
0
0
1
0
0
0
0
0
0
0
1
0
2
1
0
3
1
0
0
0
0
1996
1997
1998
1999
2000
2001
2002
30.2
30.2
30.5
30.2
30.3
30.4
30.5
35.2
34.8
35.2
35.5
35.4
35.5
35.6
25.7
26.2
26.4
25.7
26.0
26.2
26.7
257.05
48.01
2.03
0.00
0.00
0.00
0.00
13.1
12.0
12.7
11.9
11.2
13.0
12.2
10
15
15
6
12
9
12
2
1
0
1
0
0
0
22
29
36
28
36
28
22
1
0
1
1
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
90
2003
30.9
35.7
27.0
0.00
10.3
13
0
28
0
0
0
2004
2005
2006
30.4
30.5
34.9
34.8
26.4
26.7
12.95
10.2
9.9
10.0
9
22
0
0
32
37
0
0
0
0
0
0
2007
2008
2009
2010
2011
2012
30.7
30.4
30.9
30.9
30.7
31.0
35.0
34.7
35.1
35.2
35.0
34.9
26.6
26.5
27.1
27.0
26.9
27.0
9.8
9.15
9.15
9.8
10.2
91.70
10.3
10.0
9.9
9.8
10.4
11.6
20
8
12
21
11
17
0
0
0
0
0
0
33
31
17
37
34
30
0
0
1
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
2013
2014
31.2
31.2
35.5
35.7
27.0
27.1
206.78
0.00
11.5
12.1
13
16
0
0
29
31
0
0
0
0
0
0
City:Hail
Year
T
1986
21.4
1987
23.0
TM
28.4
30.1
Tm
13.7
14.8
PP
0.00
0.00
V
9.5
12.2
RA
22
27
SN
1
1
TS
20
17
FG
6
1
TN
0
0
GR
2
4
1988
1989
1990
22.6
21.7
22.5
29.2
28.6
29.7
14.5
13.6
14.1
0.00
19.06
24.88
13.6
12.3
12.4
17
30
20
0
0
0
10
9
6
3
4
3
1
0
0
0
0
1
1991
22.4
29.3
14.4
10.00
12.5
41
2
17
2
0
0
1992
1993
1994
1995
20.8
22.0
22.0
22.6
27.5
28.9
28.8
29.2
13.1
14.1
14.1
14.5
6.09
0.00
0.00
199.90
12.9
11.9
11.4
10.6
32
47
24
22
1
0
0
0
17
27
24
18
7
7
2
9
1
0
0
0
2
0
1
1
1996
1997
1998
1999
23.0
21.9
23.4
23.6
29.8
28.6
30.6
30.7
14.9
13.9
14.9
15.3
0.00
0.00
0.00
0.00
11.4
12.4
11.4
10.7
27
29
25
25
1
0
3
2
13
16
12
16
4
3
1
2
0
0
0
0
1
0
0
0
2000
2001
2002
2003
23.0
23.5
23.5
23.3
30.0
30.6
30.6
30.6
14.8
15.2
15.4
15.1
0.00
0.00
0.00
0.00
11.1
10.8
10.9
11.1
34
28
22
17
0
0
0
0
26
21
19
15
7
1
4
4
0
0
0
0
0
0
0
0
2004
2005
2006
22.9
23.1
30.4
30.2
14.5
15.0
0.00
31.5
12.5
13.1
18
36
0
0
20
27
5
2
0
0
0
1
2007
23.2
30.6
14.5
32.00
14.3
4
0
7
2
0
1
91
2008
22.9
30.0
14.5
33.5
14.0
15
1
7
5
0
1
2009
23.2
30.5
14.8
39.37
14.8
14
0
18
6
0
0
2010
2011
2012
2013
24.4
23.0
23.6
23.1
31.9
30.0
30.8
30.1
16.0
14.6
14.9
15.1
87.89
51.07
65.00
101.58
14.0
12.1
12.4
12.3
13
15
17
20
0
0
0
0
12
12
20
14
0
1
1
2
0
0
0
0
0
0
0
0
2014
23.6
30.4
15.5
0.00
12.3
19
0
27
2
0
0
TM
34.1
35.2
35.2
34.5
35.2
35.1
33.3
34.8
34.6
35.0
Tm
20.7
21.3
21.4
21.0
21.0
21.4
19.9
21.0
21.2
21.8
PP
0.00
0.25
0.00
6.60
129.54
145.03
28.19
135.89
190.25
193.04
V
12.1
10.3
11.9
12.0
11.0
12.0
11.1
10.9
13.9
11.4
RA
17
13
17
21
6
27
16
24
13
10
SN
0
0
0
1
0
0
0
1
1
0
TS
11
3
6
12
4
15
14
22
21
14
FG
0
1
1
1
0
2
2
0
0
0
TN
0
0
1
0
1
0
0
0
0
0
GR
0
0
2
1
1
0
1
0
0
1
City: Madinah
Year
T
1986
27.9
1987
28.6
1988
28.7
1989
28.1
1990
28.4
1991
28.4
1992
26.7
1993
28.1
1994
28.1
1995
28.7
1996
1997
1998
1999
2000
2001
2002
2003
2004
29.1
27.8
29.1
29.3
28.8
29.3
29.4
29.1
29.1
35.5
34.1
35.9
35.9
35.5
36.0
36.2
35.9
35.7
22.2
21.0
21.9
21.9
21.4
21.9
21.9
21.9
21.7
27.94
6.10
0.00
0.00
0.0
0.0
0.00
0.00
70.10
12.2
11.4
11.6
11.5
11.6
11.1
11.5
11.8
13.1
8
16
13
6
10
11
12
4
11
2
0
0
0
0
1
0
0
0
11
18
15
10
14
15
6
9
14
0
0
0
0
0
0
0
0
0
0
0
0
1
0
0
0
0
0
0
0
1
0
0
0
0
0
0
2005
2006
28.7
34.9
21.6
39.37
9.9
12
0
16
0
0
1
2007
2008
2009
2010
2011
29.0
28.7
29.2
30.2
28.9
35.5
35.1
35.7
37.0
35.3
21.7
21.5
21.8
22.7
21.8
5.08
31.49
18.29
114.81
69.85
9.3
9.7
9.6
9.7
10.0
4
10
12
9
9
0
0
0
0
0
5
5
13
8
5
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
92
2012
29.2
35.5
21.8
94.23
10.6
7
0
7
0
0
0
2013
2014
29.3
29.6
35.3
34.9
22.4
23.5
28.19
0.00
11.1
12.5
8
11
0
0
12
12
0
0
0
0
0
0
City: Makkah (Mecca)
Year
T
TM
1985
29.8
38.0
1986
30.0
37.6
1987
30.8
38.1
1988
31.2
38.5
1989
30.1
37.7
Tm
23.7
23.6
24.1
24.5
23.4
PP
2.03
0.00
0.00
0.00
50.03
V
6.4
7.2
6.9
7.7
7.4
RA
8
6
12
8
15
SN
0
0
0
1
0
TS
3
4
7
7
5
FG
0
0
1
1
5
TN
0
0
0
0
1
GR
0
1
0
1
4
1990
30.4
38.2
23.4
7.11
7.2
5
0
7
2
0
1
1991
1992
1993
1994
1995
1996
1997
1998
30.3
29.1
30.5
30.6
31.0
31.0
30.4
30.5
37.2
36.4
37.7
37.4
37.8
37.8
37.2
37.2
23.9
22.6
24.0
24.5
24.7
24.8
24.2
24.5
62.23
30.98
0.00
0.00
0.00
0.00
0.00
0.00
7.0
6.6
6.4
5.6
6.1
5.9
5.4
4.0
18
21
9
8
4
20
15
16
0
0
2
0
0
0
0
0
8
12
6
6
4
15
6
13
1
2
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
1
0
0
0
0
0
1
1999
2000
2001
2002
2003
2004
31.5
31.0
31.4
31.5
31.4
30.7
39.2
38.5
38.8
38.5
38.5
37.9
25.1
24.9
25.1
25.3
25.4
25.0
0.00
0.00
0.00
0.00
0.00
0.00
4.3
5.4
6.0
6.5
4.6
6.2
20
10
10
10
3
10
1
0
0
0
0
0
17
13
16
15
7
7
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
2005
2006
30.9
37.9
25.3
164.84
6.2
14
0
15
0
0
0
2007
30.9
38.0
25.4
170.2
6.3
12
0
13
0
0
0
2008
2009
2010
2011
2012
2013
2014
31.5
31.3
31.8
31.0
31.5
31.7
31.8
39.2
39.4
39.9
38.7
39.1
39.1
39.0
25.5
25.4
25.7
25.3
26.1
26.2
26.3
274.83
254.1
251.9
127.27
76.21
39.87
87.38
3.1
3.0
3.1
2.3
2.4
2.5
2.0
6
14
12
8
10
9
8
0
0
0
0
0
0
0
12
13
13
9
12
6
11
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
93
City: Najran
Year
T
1986
25.0
1987
26.1
1988
26.5
1989
26.0
1990
26.4
1991
25.5
TM
31.6
32.2
32.0
31.2
32.3
32.7
Tm
17.2
17.3
17.2
16.7
17.1
17.1
PP
139.95
0.00
0.00
3.30
201.43
6.10
V
9.4
9.1
9.8
10.4
10.5
10.0
RA
29
24
23
13
10
11
SN
0
0
0
0
0
0
TS
15
2
6
3
6
4
FG
0
0
3
1
0
2
TN
0
0
0
0
0
0
GR
1
0
0
0
0
0
1992
1993
25.8
26.8
31.6
32.3
17.0
17.1
0.00
0.00
10.4
10.2
32
31
0
1
7
17
7
2
0
0
0
0
1994
1995
27.1
25.4
32.8
32.7
17.7
17.1
0.00
27.94
9.3
7.4
6
14
2
1
10
3
1
1
0
0
0
0
1996
1997
1998
1999
25.4
25.9
26.1
25.7
32.9
33.3
33.8
33.5
16.6
17.4
17.0
15.8
0.00
4.06
0.00
0.00
6.4
7.5
7.0
6.9
21
25
20
7
2
1
1
0
10
10
13
2
0
0
0
0
0
0
0
0
0
0
0
1
2000
2001
2002
2003
26.1
25.8
25.6
26.1
33.9
33.5
33.4
34.2
16.3
16.9
16.3
16.8
0.00
0.00
0.00
0.00
6.6
7.5
7.3
6.5
6
20
10
16
0
0
0
0
5
12
0
16
1
0
1
0
0
0
0
0
0
0
0
1
2004
2005
2006
25.4
26.5
33.5
34.4
16.4
17.7
15.49
0.00
6.3
6.8
20
8
0
0
11
7
0
0
0
0
0
0
2007
2008
2009
26.6
26.1
26.9
34.5
34.1
34.9
17.9
17.2
18.1
0.00
0.00
1.02
7.0
7.0
7.3
6
13
7
0
0
0
7
8
5
0
0
0
0
0
0
0
0
0
2010
2011
2012
26.5
26.5
26.0
34.4
34.2
34.0
18.1
18.3
17.5
0.00
0.00
59.71
7.8
8.2
7.9
15
23
12
1
0
0
21
19
17
0
0
0
0
0
0
0
0
0
2013
25.8
33.3
17.8
0.00
7.9
16
0
17
0
0
0
2014
26.1
33.9
17.7
0.00
8.2
12
0
9
0
0
0
City : Rafha
Year
T
1986
23.3
1987
23.7
1988
23.1
TM
30.9
31.2
30.2
Tm
15.7
16.0
15.4
PP
0.00
0.00
0.00
V
15.5
13.9
14.5
RA
36
29
25
SN
0
0
0
TS
13
15
5
FG
1
0
1
TN
0
0
0
GR
0
0
0
94
1989
24.9
30.5
15.4
0.00
15.9
28
0
8
2
0
2
1990
1991
1992
1993
1994
1995
1996
1997
1998
23.7
23.1
21.3
22.9
23.2
23.2
24.0
23.0
25.3
31.4
30.7
29.1
30.7
30.8
30.5
31.5
30.0
32.4
15.5
15.5
13.7
14.9
15.2
15.3
16.2
15.4
16.5
3.05
80.26
65.54
0.00
0.00
197.36
0.00
55.88
22.10
12.3
11.5
10.7
14.9
15.4
14.3
14.7
15.6
14.3
11
32
27
40
32
29
23
29
14
0
0
0
1
0
0
0
2
0
2
19
8
14
17
9
5
6
2
3
7
6
9
7
7
7
7
4
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
1999
25.0
32.1
16.5
0.00
14.0
20
0
2
8
0
0
2000
2001
2002
2003
2004
2005
2006
24.5
25.0
2501
23.6
23.5
24.1
31.2
32.1
32.1
31.4
31.5
31.4
16.1
15.2
15.3
15.5
15.4
16.4
0.00
0.00
0.00
0.00
2.03
0.00
14.4
13.8
13.9
14.0
16.6
12.5
28
20
23
21
26
27
0
0
0
0
0
0
3
4
5
10
5
11
12
5
5
9
8
4
0
0
0
0
0
0
0
0
0
0
0
0
2007
24.3
31.7
16.1
0.00
13.5
11
0
4
0
0
0
2008
2009
2010
2011
2012
2013
2014
24.1
24.1
25.8
23.7
24.6
23.7
24.4
31.1
31.1
33.2
31.0
31.6
30.5
31.1
16.3
16.5
18.0
15.9
17.0
16.4
17.1
0.00
39.38
92.96
0.00
68.83
0.00
0.00
12.3
13.2
13.4
13.9
13.7
13.7
13.3
14
15
14
20
17
39
39
0
0
0
0
0
0
0
4
6
6
5
8
15
21
3
10
0
1
6
3
4
0
0
0
0
0
0
0
0
0
0
0
0
1
2
City: Riyadh
Year
T
1986
24.7
1987
25.9
1988
25.5
1989
24.8
1990
25.6
1991
25.3
1992
24.0
TM
32.0
33.5
32.8
32.3
33.6
32.9
31.4
Tm
16.7
17.6
17.0
16.4
16.6
16.9
16.1
PP
0.00
0.00
0.00
102.11
21.34
175.76
121.92
V
12.3
12.0
11.9
11.5
10.8
10.9
10.5
RA
47
20
27
31
22
28
43
SN
0
0
0
0
0
2
1
TS
20
8
20
15
5
11
12
FG
4
3
1
2
6
8
9
TN
0
0
0
0
0
0
0
GR
2
0
0
3
2
2
2
95
1993
25.3
32.7
17.0
108.21
9.7
42
0
23
4
0
0
1994
1995
1996
1997
1998
1999
2000
2001
2002
26.0
25.5
26.0
25.3
26.7
26.9
26.4
26.4
26.4
33.2
32.7
33.3
32.4
34.4
34.9
34.0
34.3
34.2
17.6
17.2
17.8
17.5
18.1
18.2
18.4
18.1
18.5
0.00
0.00
5.08
12.19
0.00
0.00
0.00
0.00
0.00
11.2
10.6
9.7
10.6
9.3
9.4
10.3
10.8
10.9
20
30
27
44
15
14
20
16
24
0
0
1
1
0
1
0
0
0
7
8
9
16
1
1
3
2
6
1
5
4
3
2
2
5
0
8
0
1
0
0
0
1
0
0
0
0
0
0
1
0
0
0
0
0
2003
26.5
34.1
18.6
0.00
11.0
17
1
8
1
0
1
2004
2005
2006
26.0
26.1
33.6
33.3
17.8
18.1
18.04
0.00
10.5
10.6
23
20
0
0
10
6
4
0
0
0
0
0
2007
2008
2009
2010
2011
26.3
25.9
26.4
27.0
25.9
33.7
33.4
33.9
35.0
33.2
18.1
17.8
18.6
18.7
18.5
36.08
0.00
70.87
123.43
154.19
9.3
10.5
10.2
9.8
10.8
16
17
14
15
20
0
0
0
0
0
8
1
8
11
13
0
3
2
0
0
0
0
0
0
0
0
0
0
0
0
2012
2013
2014
26.4
26.1
26.4
33.5
33.1
33.0
18.7
18.5
18.9
0.00
0.00
0.00
10.9
11.0
9.9
29
25
22
0
0
0
18
15
10
2
0
0
0
0
0
1
0
0
TM
35.4
35.8
35.3
34.7
Tm
19.9
20.3
20.4
19.4
PP
0.00
10.92
0.00
0.00
V
12.3
11.3
15.2
15.2
RA
7
6
9
12
SN
0
0
0
0
TS
1
0
2
0
FG
0
0
0
0
TN
0
0
0
0
GR
0
0
0
0
35.7
36.2
35.0
35.5
36.2
35.8
35.9
19.4
19.8
18.6
17.5
19.1
18.1
18.1
0.00
0.00
0.00
0.00
0.00
117.35
2.03
14.9
14.8
14.2
14.5
16.1
15.0
10.4
4
2
14
13
0
3
3
0
0
1
0
0
0
1
1
1
5
3
0
2
4
0
0
0
0
1
0
0
0
0
0
0
0
0
0
0
0
1
0
0
0
0
City: Sharurah
Year
T
1986
27.9
1987
28.4
1988
29.3
1989
28.0
1990
1991
1992
1993
1994
1995
1996
29.2
29.6
28.9
28.5
30.1
28.9
28.3
96
1997
28.6
36.5
18.1
0.00
11.2
7
0
3
0
0
0
1998
1999
2000
2001
2002
2003
2004
2005
2006
29.2
29.0
29.2
29.1
29.9
28.8
28.3
28.9
36.9
36.6
36.5
36.5
26.6
36.4
36.1
36.4
19.8
20.0
19.9
19.8
19.8
19.8
19.0
19.9
0.00
0.00
0.00
0.00
0.00
59.94
59.94
17.02
12.5
12.7
12.3
10.7
9.9
9.1
6.7
11.6
7
1
2
4
5
9
8
6
0
1
0
0
0
0
0
0
3
1
0
2
0
7
5
3
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
1
0
0
2007
2008
2009
2010
2011
2012
2013
2014
28.9
28.3
29.3
29.2
28.9
29.3
28.3
28.8
36.2
35.9
36.9
36.8
36.5
36.8
35.5
36.3
20.0
19.0
20.4
20.4
20.3
20.7
19.9
20.2
24.90
34.03
7.11
30.99
37.85
59.70
87.13
70.36
11.2
12.2
12.7
10.8
11.5
12.8
12.6
13.3
8
6
1
6
7
2
11
3
0
0
0
0
0
0
0
0
3
3
3
3
4
1
12
3
0
1
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
City: Tabuk
Year
T
1986
21.5
TM
29.4
Tm
14.6
PP
2.04
V
11.0
RA
13
SN
0
TS
4
FG
1
TN
0
GR
2
1987
1988
1989
1990
22.2
22.0
21.4
21.9
30.3
29.7
29.5
29.9
14.5
14.6
13.8
14.2
26.41
2.03
119.89
2.04
11.0
11.8
10.3
10.2
19
29
22
14
1
1
0
0
9
13
14
7
1
0
4
2
0
1
0
0
0
2
2
1
1991
1992
1993
22.0
20.5
21.6
29.6
28.1
29.4
14.6
13.0
14.1
0.51
0.00
0.00
10.1
10.1
9.8
22
26
32
2
2
2
5
6
12
0
2
1
0
0
0
1
1
0
1994
21.4
29.2
14.4
195.83
9.9
30
0
17
1
0
0
1995
1996
1997
1998
21.8
22.4
21.2
22.8
29.8
30.4
29.3
30.9
14.3
14.7
12.5
15.2
1.02
1.02
33.02
0.00
10.5
10.4
10.0
10.2
14
16
14
9
0
1
1
1
2
8
8
3
0
1
1
0
0
0
0
0
0
0
1
0
1999
2000
22.5
21.9
30.4
29.6
15.0
14.5
0.00
0.00
9.1
9.1
13
10
0
0
4
10
0
0
0
1
1
0
97
2001
22.6
30.5
15.0
10.93
7.8
8
0
8
1
0
1
2002
22.6
30.4
14.9
0.00
8.2
7
0
6
0
0
0
2003
2004
2005
2006
22.6
22.5
22.3
30.3
30.2
29.9
14.9
14.7
14.8
0.00
1.02
58.17
9.5
9.1
9.5
7
7
7
0
0
0
5
4
5
0
0
0
0
0
0
0
0
0
2007
2008
2009
2010
2011
2012
22.5
22.7
22.6
24.6
22.3
23.0
30.2
30.3
30.1
32.1
29.6
30.2
14.8
15.1
15.1
16.7
14.9
15.4
81.80
1.02
30.48
19.56
20.83
0.00
9.5
10.3
9.5
8.7
9.8
10.8
10
6
13
11
8
17
1
0
0
0
0
1
5
1
2
7
7
9
0
1
1
0
0
0
0
0
0
0
0
0
0
0
1
3
1
0
2013
2014
22.9
23.2
30.1
30.4
15.5
16.0
93.75
42.90
11.0
11.4
18
16
0
0
4
6
0
1
0
0
0
0
City: Taif
Year
T
1985
21.8
1986
22.0
1987
23.1
TM
29.0
28.9
29.7
Tm
16.1
15.9
16.7
PP
0.00
6.10
0.00
V
12.7
12.8
12.7
RA
35
37
35
SN
0
0
0
TS
49
51
43
FG
8
5
3
TN
0
0
0
GR
1
3
2
1988
1989
1990
1991
1992
1993
1994
1995
1996
23.4
22.3
23.2
23.4
21.9
23.1
23.2
23.4
23.3
29.6
28.7
29.7
29.7
28.4
29.9
29.6
30.3
30.3
16.8
16.0
16.6
16.8
15.3
16.4
16.4
16.3
15.0
0.00
4.06
9.91
36.59
77.98
23.88
0.00
0.00
0.00
13.8
12.8
12.8
13.2
14.3
14.4
14.8
13.6
12.0
31
49
19
34
31
24
17
19
32
0
0
1
1
0
1
0
0
3
34
42
29
44
35
44
37
39
53
7
10
6
6
5
3
4
8
8
0
0
0
0
0
0
0
0
0
4
6
3
5
3
1
1
0
3
1997
1998
1999
2000
2001
2002
2003
22.7
23.3
23.6
23.6
23.4
23.5
23.8
29.7
30.9
31.3
31.0
30.7
30.8
31.0
14.8
15.5
15.6
15.7
15.0
15.5
16.5
34.04
0.00
0.00
0.00
0.00
0.00
0.00
12.2
12.7
13.5
12.5
13.8
13.9
13.5
34
27
21
30
28
26
17
0
1
0
1
0
1
1
55
43
54
55
51
40
23
12
5
10
5
5
9
11
0
0
0
0
0
0
0
1
0
0
2
3
2
0
98
2004
23.5
30.6
16.1
0.00
13.0
27
1
42
14
0
0
2005
2006
23.0
30.3
16.2
0.00
13.5
33
0
43
6
0
2
2007
2008
2009
2010
2011
2012
2013
23.2
23.2
23.6
24.0
23.4
23.6
23.5
30.5
30.4
30.8
31.2
30.5
30.5
30.3
16.2
16.0
16.8
16.7
16.5
17.0
16.6
0.00
0.00
0.00
0.00
71.87
101.62
101.87
13.2
12.1
13.2
13.5
14.2
15.0
14.4
18
23
24
20
11
20
14
0
0
0
0
0
0
0
34
36
46
46
16
34
40
8
10
10
1
9
9
6
0
0
0
0
0
0
0
1
0
1
1
0
1
0
2014
23.8
30.4
17.3
0.00
14.5
30
1
47
8
0
1
City: Turaif
Year
T
1986
18.5
TM
26.3
Tm
11.3
PP
101.09
V
14.0
RA
51
SN
0
TS
9
FG
5
TN
0
GR
1
1987
1988
1989
1990
1991
19.1
19.5
20.5
20.0
19.7
26.8
25.8
26.5
26.4
26.3
11.4
11.4
11.0
11.7
11.5
0.00
0.00
0.00
184.94
38.36
13.9
13.7
12.5
12.8
13.5
35
42
24
35
31
0
0
0
1
1
8
7
6
4
4
8
5
5
7
3
0
0
0
0
0
3
3
1
2
0
1992
17.9
24.4
10.2
7.12
18.2
53
7
8
17
0
1
1993
1994
1995
1996
18.8
19.2
20.7
20.3
26.0
25.6
25.8
27.0
11.3
12.4
11.8
12.3
0.00
0.00
41.91
85.85
16.8
18.8
17.5
16.4
35
47
17
37
3
0
0
5
9
9
5
4
13
4
8
14
0
0
0
0
0
0
0
0
1997
1998
1999
2000
19.6
20.6
20.0
19.4
25.6
27.7
27.5
26.5
11.3
13.0
12.0
11.6
0.00
46.99
0.00
0.00
16.6
14.1
13.5
14.2
25
22
14
20
0
2
0
2
5
0
2
3
8
4
7
10
0
0
1
0
0
0
0
0
2001
2002
2003
2004
19.9
19.9
19.2
19.3
27.2
27.1
26.2
26.4
12.2
12.2
12.2
12.0
0.00
0.00
0.00
0.00
14.4
15.4
16.2
16.1
25
36
16
24
0
1
0
0
1
9
2
3
5
4
8
4
0
1
2
0
0
0
0
0
2005
2006
19.9
26.1
11.9
0.00
15.1
25
0
5
2
0
0
2007
19.4
26.3
12.3
0.00
15.9
20
0
5
1
0
0
99
2008
2009
2010
19.3
19.3
21.4
26.3
26.0
28.4
11.8
11.8
14.1
0.00
0.00
0.00
15.0
15.1
14.8
12
11
25
4
0
1
0
3
5
2
5
4
0
0
0
0
1
1
2011
2012
2013
2014
18.9
19.8
19.3
19.6
25.7
26.4
26.1
26.3
11.7
12.7
12.1
12.6
0.00
0.00
0.00
0.00
14.8
15.4
16.1
15.1
27
21
24
25
0
0
1
0
4
2
4
4
5
8
7
10
0
0
0
0
0
0
0
1
City: Wejh
Year
T
1986
24.8
TM
29.8
Tm
20.0
PP
0.00
V
16.9
RA
7
SN
0
TS
2
FG
3
TN
0
GR
1
1987
1988
1989
1990
1991
1992
25.1
25.4
24.4
25.0
25.0
24.0
30.0
30.5
29.8
30.1
30.0
28.8
19.8
20.0
19.5
19.7
20.0
18.7
0.00
4.06
0.00
0.00
0.00
0.00
17.5
18.3
17.7
17.6
17.5
17.4
9
10
11
8
19
18
2
0
0
0
0
0
4
7
5
4
6
2
4
3
7
3
5
4
0
0
0
0
0
0
2
3
3
3
1
2
1993
1994
1995
25.0
25.0
25.1
29.5
29.9
29.8
19.9
19.9
19.8
0.00
0.00
0.00
17.1
16.1
16.7
14
8
6
0
0
1
8
4
0
5
0
4
0
0
0
1
0
1
1996
25.3
29.9
19.8
0.00
18.3
10
2
5
7
1
0
1997
1998
1999
2000
24.8
25.7
25.6
24.8
29.3
30.2
30.4
29.4
19.5
20.5
20.2
19.3
2.03
0.00
0.00
1.02
16.6
15.8
16.2
15.5
13
7
7
7
2
0
0
0
7
3
2
0
7
3
1
1
0
0
0
0
0
0
0
0
2001
2002
2003
2004
25.4
25.3
25.6
25.4
30.1
30.5
30.7
30.5
20.3
20.3
20.5
20.1
0.51
1.02
1.02
1.02
15.3
15.2
14.2
14.7
8
5
5
5
0
1
0
0
3
2
2
1
5
2
0
7
0
0
0
0
1
0
0
0
2005
2006
25.2
30.1
20.1
8.89
14.9
3
0
2
8
0
0
2007
25.1
30.0
19.8
111.00
13.7
4
0
0
6
0
0
2008
2009
2010
25.5
25.3
27.1
30.5
30.5
32.2
20.3
20.1
22.0
79.24
196.85
67.06
12.6
14.2
13.6
8
7
6
0
0
0
1
3
4
2
2
6
0
0
0
0
0
0
2011
25.6
30.6
20.2
12.19
14.3
4
0
1
1
0
0
100
2012
26.1
31.2
20.8
32.75
13.8
5
0
3
1
0
0
2013
2014
26.4
26.7
31.2
31.0
21.2
21.7
28.19
71.12
15.2
15.2
7
7
0
0
3
6
2
1
0
0
0
0
City: Yanbo
Year
T
1986
26.7
1987
27.5
TM
33.9
34.9
Tm
20.5
20.8
PP
0.00
0.00
V
14.8
14.4
RA
4
2
SN
0
0
TS
2
2
FG
3
7
TN
0
0
GR
0
0
1988
1989
1990
28.0
27.3
27.1
35.1
34.4
34.6
21.2
20.8
20.2
8.89
139.20
1.02
15.2
11.7
11.8
5
9
3
0
1
0
0
7
2
1
10
12
0
0
0
0
1
1
1991
27.4
34.2
21.0
219.20
13.1
9
0
3
6
0
1
1992
1993
1994
1995
26.1
27.6
27.4
27.6
33.0
34.6
34.3
34.5
19.6
21.0
21.1
20.9
100.33
0.00
0.00
181.86
13.3
12.7
11.6
14.2
12
12
3
3
0
0
0
0
8
6
6
3
2
5
2
6
0
0
0
0
0
1
0
0
1996
1997
1998
1999
27.6
27.1
28.1
28.6
35.0
34.8
35.6
36.0
20.8
19.9
20.9
21.6
194.06
0.00
105.92
0.00
12.3
14.7
15.9
16.2
7
9
2
7
1
0
1
0
7
3
4
6
6
4
4
7
0
0
0
0
0
0
0
0
2000
2001
2002
2003
27.4
28.9
28.9
28.5
35.2
36.3
36.3
36.0
20.1
21.9
21.2
21.9
0.00
0.00
0.00
0.00
14.5
14.0
14.1
14.1
3
3
7
3
0
0
0
0
1
4
3
1
6
5
4
3
0
0
0
0
0
0
0
0
2004
2005
2006
28.6
28.6
37.1
35.9
21.3
21.7
0.00
0.00
13.6
13.4
4
2
0
0
2
3
4
6
0
1
0
0
2007
2008
27.7
28.3
34.8
34.7
21.1
22.0
0.00
6.10
12.3
13.3
2
4
0
0
0
2
6
5
0
0
0
0
2009
28.1
35.2
21.3
106.93
12.7
3
0
4
8
0
0
2010
2011
2012
2013
29.6
27.7
28.1
28.5
36.5
34.9
35.1
35.3
22.9
20.9
21.3
22.0
42.16
5.08
41.14
67.06
13.9
13.0
12.8
12.8
8
3
5
4
0
0
0
0
7
5
8
6
7
3
7
4
0
0
0
0
0
0
0
0
2014
29.0
35.5
22.5
35.81
13.3
7
0
6
4
0
0
101
City:Abha
Year
T
1986
17.6
1987
18.5
TM
24.7
25.4
Tm
11.7
12.3
PP
0.00
0.00
V
11.7
12.1
RA
35
49
SN
0
0
TS
39
51
FG
17
6
TN
0
0
GR
1
3
1988
1989
1990
1991
18.6
18.6
18.3
19.0
25.5
24.6
25.2
25.5
12.1
11.5
11.5
12.1
0.00
0.00
0.00
0.00
13.9
14.9
14.8
11.2
36
41
47
40
0
1
0
1
41
46
41
36
13
16
11
9
0
0
0
0
2
3
5
0
1992
1993
17.7
18.4
23.6
25.0
11.8
12.1
0.00
0.00
11.1
10.4
70
57
1
2
46
53
14
4
0
0
2
2
1994
1995
18.8
18.6
26.0
25.3
12.6
12.3
7.11
0.00
10.5
9.6
28
41
0
0
38
39
4
8
0
0
0
1
1996
1997
1998
1999
18.6
18.3
18.9
19.0
25.7
25.1
26.0
26.5
12.2
12.3
12.5
11.9
279.91
36.07
0.00
0.00
10.3
11.4
11.5
9.3
46
52
44
30
1
0
0
1
52
78
45
55
4
2
4
2
0
0
0
0
0
0
0
0
2000
2001
2002
2003
19.3
18.9
18.9
19.2
26.3
26.5
26.5
26.0
12.5
12.2
12.8
13.0
0.00
0.00
0.00
8.89
11.0
10.8
10.5
9.6
35
26
27
22
0
0
0
0
57
47
43
38
3
5
5
4
0
0
0
0
1
0
1
0
2004
2005
2006
18.9
19.1
25.8
25.9
12.8
13.1
0.00
0.00
10.9
12.6
28
37
0
0
55
65
3
2
0
0
0
2
2007
2008
2009
19.2
19.4
19.8
26.1
26.5
26.8
12.9
12.6
13.5
0.00
0.00
0.00
12.5
11.2
12.3
27
25
24
1
0
0
72
63
53
10
9
5
0
0
0
0
0
1
2010
2011
2012
19.5
19.3
19.7
26.6
26.2
26.5
13.1
13.4
13.8
0.00
0.00
0.00
11.1
11.5
11.8
40
37
26
0
0
0
82
73
55
4
6
9
0
0
0
1
3
1
2013
19.5
26.4
13.6
0.00
11.2
31
0
59
3
0
0
2014
19.8
26.7
13.9
171.97
11.1
18
0
51
5
0
1
City: Al Baha
Year
T
1986
21.7
1987
22.4
TM
28.7
29.2
Tm
16.2
16.9
PP
54.10
0.00
V
13.5
13.0
RA
38
50
SN
1
0
TS
42
40
FG
3
0
TN
0
0
GR
5
4
29.2
16.8
0.00
14.7
22
0
34
4
0
3
1988
23.6
102
1989
22.6
28.2
15.8
0.00
14.7
41
0
38
9
0
7
1990
1991
22.7
22.7
28.8
29.3
16.4
16.8
0.00
100.33
14.7
14.8
34
32
1
0
31
35
1
1
0
0
2
0
1992
1993
1994
1995
21.9
23.6
24.2
23.9
26.9
28.4
28.8
28.8
16.2
17.1
17.4
17.0
0.00
0.00
0.00
1.02
16.2
16.0
15.9
15.6
40
30
11
15
2
3
0
0
25
26
11
17
1
6
0
3
0
0
0
0
0
1
0
0
1996
1997
1998
23.5
24.5
26.1
29.8
29.7
30.8
16.8
16.4
16.7
0.00
25.91
3.05
11.9
9.8
13.8
48
52
28
1
0
1
45
63
35
4
1
3
1
1
0
2
0
0
1999
26.5
30.8
17.7
0.00
13.7
30
0
24
3
0
0
2000
2001
2002
2003
26.1
25.0
20.1
24.0
30.8
30.2
30.2
30.4
17.1
16.6
16.8
17.4
0.00
0.00
0.00
0.00
12.8
12.1
12.1
11.2
26
34
28
41
0
1
0
1
40
42
63
61
1
4
3
0
1
0
0
0
1
1
1
0
2004
2005
2006
23.9
23.0
29.8
29.4
17.0
16.9
0.00
0.00
11.3
10.2
38
32
0
0
68
43
6
2
0
0
0
0
2007
2008
2009
23.1
23.1
23.7
29.8
30.1
30.5
16.9
16.6
17.4
0.00
50.05
0.00
12.1
11.7
11.7
34
19
16
0
0
0
47
34
34
0
2
4
0
0
0
0
0
0
2010
2011
2012
2013
23.5
23.3
23.5
23.3
30.1
29.9
30.3
29.7
17.3
17.3
17.4
17.4
0.00
0.00
0.00
0.00
11.7
12.2
11.8
11.7
20
14
30
20
0
0
0
0
40
29
47
42
1
4
3
1
0
0
0
0
0
0
0
0
2014
23.4
29.7
17.5
0.00
10.8
20
0
31
1
0
0
City: Sakaka
Year
T
1986
21.1
1987
24.3
1988
23.6
1989
23.3
1990
22.5
1991
21.5
1992
20.5
TM
28.5
29.5
28.5
28.5
29.1
28.6
27.2
Tm
14.0
14.9
14.6
14.0
14.5
14.4
13.2
PP
0.00
0.00
0.00
0.00
0.00
168.91
0.00
V
13.3
13.8
13.5
12.3
13.1
14.2
15.7
RA
21
20
24
15
14
26
17
SN
0
0
0
0
1
0
3
TS
9
9
12
6
7
14
5
FG
1
1
0
3
1
4
4
TN
0
0
0
0
0
0
0
GR
1
1
1
0
2
0
0
103
1993
21.4
28.6
14.3
3.05
12.3
30
0
11
4
0
0
1994
1995
1996
1997
1998
1999
2000
2001
2002
21.8
22.9
23.6
22.8
24.5
25.1
24.4
24.8
24.7
28.6
28.8
29.9
28.3
30.5
30.0
28.9
29.8
29.5
14.9
14.7
15.1
14.2
16.0
15.7
15.4
15.2
15.2
66.04
0.00
0.00
0.00
0.00
0.00
0.00
0.00
0.00
13.9
13.4
15.1
16.2
14.1
13.7
15.1
16.8
16.7
31
19
23
19
15
18
13
10
16
0
1
0
1
0
0
0
0
0
14
6
8
8
0
3
6
2
8
4
5
5
3
0
4
1
2
2
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
1
0
2003
22.2
29.4
15.1
0.00
15.0
16
0
7
6
0
0
2004
2005
2006
22.1
22.7
29.2
29.6
14.9
15.7
59.94
94.24
13.2
13.7
13
11
0
0
7
11
4
0
0
0
0
0
2007
2008
2009
2010
2011
23.1
23.2
23.2
25.2
22.8
30.0
29.9
29.9
32.3
29.7
15.8
16.1
16.2
17.8
15.8
7.11
21.09
00.0
24.91
18.79
14.3
13.1
13.5
13.3
12.5
4
7
12
13
9
0
0
0
0
0
1
2
8
9
3
0
3
6
0
1
0
0
0
0
0
0
0
0
0
0
2012
2013
2014
23.8
23.1
23.7
30.3
29.7
30.2
17.0
16.5
17.0
13.98
109.97
0.00
12.9
14.6
13.8
10
17
24
0
0
0
9
10
17
2
1
1
0
0
0
0
0
0
City: Guriat
Year
T
1986
19.1
1987
19.4
TM
28.7
29.0
Tm
11.4
11.2
PP
0.00
0.00
V
15.3
15.5
RA
35
27
SN
0
1
TS
6
3
FG
1
4
TN
0
0
GR
2
0
1988
1989
19.3
19.3
28.3
28.3
11.4
10.5
0.00
3.05
15.9
15.6
43
19
2
1
14
1
4
6
0
0
3
1
1990
1991
19.2
20.1
28.4
27.9
11.0
12.1
4.58
36.57
15.8
16.1
37
31
1
0
6
4
1
5
0
0
0
1
1992
1993
1994
1995
19.2
19.9
21.6
19.7
26.6
28.0
28.5
28.0
10.3
11.0
12.4
11.2
0.00
330.20
0.00
2.03
17.6
16.3
18.0
15.3
38
39
26
19
2
1
0
4
3
14
12
6
3
5
3
7
0
0
0
0
1
0
1
0
1996
20.3
29.1
11.4
0.00
15.5
20
1
4
5
0
0
104
1997
19.6
27.9
11.2
0.00
14.3
27
0
8
1
0
0
1998
1999
20.9
20.2
29.6
29.2
12.5
11.7
0.00
0.00
14.1
13.7
27
11
0
0
0
1
5
4
0
0
0
0
2000
2001
20.5
20.9
28.6
29.2
10.7
11.8
0.00
0.00
14.8
14.0
17
19
1
0
1
5
1
6
0
0
0
0
2002
20.8
29.1
11.9
0.00
15.1
28
1
8
2
0
0
2003
2004
2005
2006
19.6
19.6
20.0
28.8
28.8
28.0
11.8
11.8
11.6
0.00
2.03
0.00
15.1
15.1
14.0
20
28
20
0
0
0
5
3
6
10
5
7
0
0
0
0
0
0
2007
20.0
28.6
11.8
0.00
15.8
23
0
7
1
0
0
2008
2009
2010
2011
20.0
20.2
21.1
19.7
28.7
27.2
29.3
28.2
11.7
11.9
13.8
11.8
78.23
0.00
53.84
0.00
15.8
14.3
15.1
14.9
14
14
13
18
0
0
0
0
0
1
5
2
3
4
1
1
0
0
0
0
0
1
2
0
2012
2013
2014
20.8
20.2
20.4
29.2
28.4
28.1
13.0
12.5
12.7
0.00
37.82
124.98
15.2
15.5
14.8
21
15
18
0
0
0
2
11
10
3
2
4
0
0
0
0
0
0
City: Arar
Year
T
1986
21.6
TM
29.5
Tm
14.8
PP
0.00
V
10.4
RA
33
SN
0
TS
10
FG
1
TN
0
GR
1
1987
1988
1989
21.8
21.3
21.7
29.4
28.2
28.8
15.1
14.4
14.7
3.05
12.95
2.03
10.1
13.3
11.2
30
33
15
0
0
0
13
12
4
1
3
2
0
0
0
0
1
0
1990
1991
1992
1993
22.1
21.8
20.1
21.7
28.6
29.0
27.2
28.8
14.7
15.0
13.3
14.5
0.00
0.00
4.06
4.07
11.1
10.2
9.7
12.0
13
29
31
27
0
0
3
0
3
9
4
9
1
2
8
9
0
0
0
0
0
0
1
0
1994
1995
1996
1997
21.8
23.8
24.2
22.9
29.2
28.9
29.7
28.2
15.1
14.9
15.4
14.3
1.02
0.00
0.00
0.00
10.8
12.6
11.6
12.4
30
11
16
15
1
1
1
0
7
5
1
10
7
3
7
9
0
0
0
0
0
0
0
0
1998
1999
2000
25.5
25.1
24.7
30.9
30.6
29.8
15.1
15.1
14.5
0.00
0.00
0.00
14.2
14.5
14.6
13
14
10
1
0
0
0
6
7
0
3
3
0
0
0
0
0
0
105
2001
25.1
30.7
15.2
0.00
14.6
13
0
8
6
0
0
2002
2003
2004
2005
2006
25.2
22.7
22.4
23.7
30.7
30.7
30.8
30.5
15.2
15.2
14.6
15.5
0.00
0.00
0.00
0.00
14.5
12.5
15.0
15.1
13
12
23
15
0
0
0
0
8
5
10
15
5
10
5
2
0
0
0
0
0
0
0
0
2007
24.1
30.6
15.4
0.00
16.1
8
0
5
1
0
0
2008
2009
2010
23.4
22.9
24.8
31.0
31.0
33.0
15.3
15.3
17.0
70.10
0.00
0.00
12.2
15.6
14.7
6
12
15
1
0
0
3
4
5
3
3
0
0
0
0
0
0
0
2011
22.5
29.6
15.2
0.00
14.5
19
0
8
1
0
0
2012
2013
2014
23.5
22.9
23.5
30.7
30.0
30.7
16.2
15.8
16.4
16.51
0.00
0.00
14.7
15.1
14.3
15
30
37
0
0
0
2
10
21
4
6
4
0
0
0
0
0
0
City: Buraydah
Year
T
TM
1986
24.5
32.3
Tm
17.8
PP
0.00
V
15.1
RA
40
SN
0
TS
17
FG
3
TN
0
GR
1
1987
1988
25.9
25.4
33.4
32.7
18.6
18.1
0.00
0.00
14.6
16.4
35
29
0
2
17
14
1
4
0
0
1
1
1989
24.6
32.2
17.5
0.00
16.5
36
1
13
10
0
0
1990
1991
1992
1993
25.7
25.2
23.9
24.8
32.8
32.5
30.2
31.6
17.9
18.2
16.6
17.7
0.00
0.50
0.00
0.00
16.2
15.7
15.2
14.4
30
31
30
42
0
0
0
0
9
10
9
17
2
6
11
10
0
0
0
0
0
0
1
0
1994
1995
1996
1997
25.0
25.1
26.0
24.7
31.9
32.2
33.3
31.9
17.9
17.4
18.4
17.3
57.92
261.11
0.00
307.08
13.1
12.3
12.9
12.9
40
43
34
40
0
4
2
3
24
15
16
19
6
8
12
13
0
0
0
0
2
0
1
1
1998
1999
2000
2001
26.5
26.3
25.7
26.2
34.1
34.0
33.0
33.9
18.6
18.5
18.1
18.1
60.96
0.00
0.00
0.00
10.1
10.1
11.3
12.4
26
34
34
31
0
1
0
0
8
16
20
17
3
2
12
6
0
0
0
0
1
0
0
0
2002
2003
2004
26.2
26.0
25.6
33.8
33.5
33.1
18.5
18.7
18.1
0.00
0.00
156.46
12.3
12.2
11.3
28
26
24
0
0
1
10
8
13
4
6
7
0
0
0
0
0
0
106
2005
2006
25.9
33.3
18.4
0.00
11.8
29
0
11
2
0
0
2007
26.0
33.5
18.5
0.00
12.5
16
0
6
1
0
0
2008
2009
2010
2011
26.0
25.9
27.3
25.5
33.6
33.6
35.3
33.3
18.3
18.1
19.3
17.6
0.00
0.00
0.00
57.17
12.2
11.6
11.0
11.4
15
26
18
19
0
0
0
0
3
8
14
9
0
7
0
1
0
0
0
0
0
0
0
0
2012
2013
2014
26.3
25.8
26.4
33.9
33.2
33.3
18.7
18.1
18.8
197.62
0.00
0.00
11.0
12.5
11.3
16
27
29
0
0
0
8
16
16
9
6
3
0
0
0
0
0
0
Tm
17.0
18.2
17.3
15.8
16.5
16.9
15.4
PP
0.00
0.00
0.00
4.06
21.08
137.15
514.10
V
11.4
11.8
11.9
10.7
10.5
10.1
9.2
RA
25
16
16
15
12
30
30
SN
0
0
0
0
1
0
0
TS
5
11
4
14
6
11
16
FG
2
3
2
3
2
7
8
TN
0
0
0
1
0
0
0
GR
0
0
1
4
2
0
0
City: Alqasim (Unayzah)
Year
T
TM
1986
24.2
31.4
1987
25.9
32.9
1988
25.1
32.2
1989
23.9
31.2
1990
24.8
32.4
1991
24.8
31.7
1992
23.1
30.3
1993
1994
1995
1996
1997
1998
1999
2000
2001
24.5
25.0
25.0
25.6
24.7
26.2
26.1
25.5
26.0
31.7
32.1
32.1
33.1
32.0
34.1
34.1
33.5
34.5
16.4
16.9
16.9
17.5
16.7
17.5
17.6
17.4
17.4
0.00
92.97
0.00
2.03
25.91
0.00
0.00
0.00
0.00
6.7
9.5
10.4
9.6
9.8
9.7
8.9
9.9
12.7
40
23
27
25
18
20
13
17
16
0
0
0
1
2
1
0
0
0
19
17
17
12
14
13
8
15
11
6
1
14
6
7
1
4
14
6
0
0
0
0
0
0
0
0
1
0
0
0
0
1
0
0
0
0
2002
2003
2004
2005
2006
26.1
25.9
25.5
25.6
34.2
34.2
33.7
33.3
17.3
17.1
16.8
17.7
0.00
0.00
130.30
211.34
12.6
12.6
11.8
11.5
26
17
21
21
0
0
0
0
8
14
17
20
4
2
6
0
0
0
0
0
0
0
0
0
2007
2008
25.9
25.7
34.2
33.4
17.5
17.0
13.98
92.48
11.4
10.9
7
13
0
1
3
8
2
1
0
0
0
0
107
2009
26.1
34.2
17.7
280.95
11.0
16
0
14
5
0
0
2010
2011
2012
2013
2014
26.8
26.0
26.7
26.3
27.0
35.2
33.6
34.4
33.6
33.6
18.4
18.1
18.5
18.3
19.5
0.00
0.00
0.00
0.00
0.00
9.9
11.4
11.3
12.0
11.9
17
28
17
16
11
0
0
0
0
0
21
22
22
20
23
0
1
2
1
1
0
0
0
0
0
1
1
0
0
0
City: Dahran
Year
T
1986
26.3
TM
33.1
Tm
20.2
PP
0.00
V
14.7
RA
36
SN
1
TS
13
FG
11
TN
0
GR
0
1987
1988
1989
1990
1991
1992
26.7
26.6
26.0
26.5
25.7
25.0
33.6
33.3
32.7
33.4
32.1
31.7
20.2
20.4
19.6
20.2
20.2
19.2
0.00
0.00
0.00
0.00
0.00
0.00
14.2
16.1
16.2
16.1
15.8
15.8
27
35
27
22
37
46
0
1
0
0
1
0
5
11
11
5
14
12
18
11
10
11
15
13
0
0
1
0
0
0
0
0
3
1
1
2
1993
1994
1995
26.0
26.7
26.2
32.9
33.3
32.7
20.0
20.7
20.2
37.08
522.22
0.00
15.9
16.2
14.9
34
34
41
0
0
0
12
8
8
15
8
15
0
0
0
0
1
0
1996
1997
1998
1999
26.8
26.3
27.4
27.6
33.3
32.7
34.4
34.6
20.8
20.2
21.0
21.2
0.00
75.95
0.25
0.00
14.4
15.4
15.5
16.3
30
42
19
16
0
2
1
0
8
16
4
9
19
12
13
8
0
1
0
0
0
0
0
1
2000
2001
2002
2003
26.8
27.2
27.1
26.8
33.7
34.5
34.1
33.8
20.2
20.3
20.1
20.6
0.00
0.00
0.00
159.00
17.8
17.2
17.2
14.5
18
11
22
29
0
0
0
0
9
2
8
19
11
19
4
16
0
0
0
0
0
0
0
0
2004
2005
2006
26.8
27.7
33.7
34.9
20.2
21.0
173.99
0.00
14.5
15.4
34
33
0
0
15
14
6
8
0
0
0
0
2007
27.9
35.7
20.9
0.00
15.3
24
0
15
20
0
0
2008
2009
2010
27.8
28.0
27.9
35.7
35.5
35.4
20.7
21.1
21.2
24.13
0.00
115.56
15.6
15.8
14.3
13
26
16
0
0
0
7
15
13
16
8
10
0
0
0
0
0
1
2011
2012
27.0
27.2
33.8
34.3
20.4
20.6
0.00
0.00
15.6
14.7
26
26
0
0
8
9
7
9
0
0
0
0
108
2013
27.0
33.8
20.4
0.00
15.4
24
0
17
15
0
0
2014
27.6
34.1
21.1
0.00
15.8
21
0
10
12
0
0
City: Al Ahsa
Year
T
1986
28.1
1987
27.0
TM
33.9
34.6
Tm
19.6
19.3
PP
0.00
0.00
V
16.8
15.0
RA
15
19
SN
0
2
TS
4
6
FG
3
2
TN
0
0
GR
0
2
1988
1989
1990
1991
27.7
27.9
27.6
26.0
33.9
33.6
34.4
33.7
19.1
18.3
19.1
18.8
0.00
0.00
0.00
0.00
16.1
17.2
17.2
14.9
23
16
16
30
1
0
1
1
13
9
10
8
7
4
7
10
0
0
0
0
0
2
1
0
1992
1993
1994
1995
25.5
26.8
27.2
26.7
33.0
34.4
34.8
34.0
18.0
18.8
19.3
18.5
27.18
0.00
1.02
0.00
14.9
14.5
15.0
13.8
29
31
14
32
0
0
1
0
13
20
6
11
5
6
3
4
0
0
0
0
2
0
0
0
1996
1997
1998
1999
26.9
26.5
27.8
27.9
34.6
34.0
36.1
36.3
19.0
19.1
19.7
19.9
0.00
36.08
0.00
0.00
11.9
13.1
9.8
9.8
23
27
10
11
0
2
0
0
7
16
6
3
2
5
4
5
0
0
0
0
0
1
0
0
2000
2001
2002
2003
27.2
27.7
27.6
27.6
35.4
36.4
36.5
35.8
19.3
19.5
19.4
20.7
0.00
0.76
0.00
0.00
9.4
9.7
9.7
12.6
13
7
24
23
0
0
1
0
4
4
2
13
5
2
5
7
0
0
0
0
0
0
0
1
2004
2005
2006
27.4
27.8
35.7
35.5
20.2
20.6
0.00
70.62
12.0
11.7
24
26
0
0
8
8
7
3
0
0
0
0
2007
27.7
27.5
35.7
35.4
20.4
20.1
58.69
18.80
10.9
8.6
18
12
0
0
10
1
2
3
0
0
1
0
2008
2009
27.8
35.7
20.7
0.00
10.0
20
0
9
6
0
0
2010
2011
2012
2013
28.5
27.4
28.0
27.6
36.9
35.3
35.9
35.3
21.0
20.1
20.4
20.1
0.00
154.17
91.44
124.96
10.2
14.3
15.2
14.9
20
17
21
20
0
0
0
0
11
10
10
14
5
8
4
6
0
0
0
0
0
0
0
0
2014
28.0
35.6
20.3
0.00
13.7
22
0
12
6
0
0
109
City: Khamis Mushait
Year
T
TM
1986
18.5
25.9
1987
19.5
27.0
Tm
12.9
13.4
PP
0.00
0.00
V
10.1
8.5
RA
47
59
SN
1
0
TS
35
35
FG
2
1
TN
1
0
GR
2
3
1988
1989
1990
1991
19.7
19.1
19.2
19.8
27.7
26.3
26.7
27.1
13.6
13.2
13.3
14.0
1.02
36.07
0.00
16.00
8.5
8.6
8.2
9.5
54
52
48
44
0
1
1
0
25
29
32
41
1
4
3
0
0
0
0
0
6
7
4
0
1992
1993
18.6
19.3
25.4
26.4
13.4
13.3
0.00
0.00
13.8
10.5
66
58
0
1
45
48
2
3
0
0
3
2
1994
1995
19.7
19.6
26.9
26.5
13.5
13.3
0.00
0.00
10.5
11.3
41
44
0
1
38
34
0
0
0
0
0
0
1996
1997
1998
1999
19.7
19.4
20.0
20.1
26.8
26.4
27.6
28.1
13.3
13.6
13.7
13.3
25.91
55.88
0.00
0.00
11.1
10.2
11.5
11.5
47
60
47
32
1
0
1
1
40
66
46
33
1
4
0
1
0
0
0
0
1
1
1
3
2000
2001
2002
2003
20.3
20.0
20.1
20.6
28.1
27.8
27.9
28.0
13.5
13.1
13.1
13.9
0.00
0.00
0.00
7.11
11.1
11.8
11.9
12.5
31
32
29
20
0
0
0
0
43
36
34
29
2
0
3
3
0
0
0
0
0
1
1
1
2004
2005
2006
20.3
20.1
27.5
27.4
13.6
13.6
0.00
0.00
11.9
10.2
36
41
0
0
50
45
3
3
0
0
1
1
2007
2008
2009
20.0
20.2
20.5
27.4
27.8
27.9
13.5
13.4
13.7
0.00
0.00
30.49
10.1
9.2
10.6
34
30
14
0
0
0
49
43
24
2
5
0
0
0
0
1
0
0
2010
2011
2012
20.2
20.0
20.3
28.0
27.8
28.0
13.3
13.0
13.0
0.00
0.00
0.00
11.1
11.5
11.2
30
30
28
0
0
0
60
39
43
0
2
1
0
0
0
1
0
0
2013
20.2
27.2
14.0
0.00
10.9
28
0
40
0
0
0
2014
20.3
27.2
14.2
0.00
11.3
26
0
36
0
0
0
City:Jeddah
Year
T
1986
28.1
TM
34.5
Tm
22.1
PP
10.92
V
12.6
RA
3
SN
0
TS
3
FG
3
TN
0
GR
1
35.0
35.1
22.3
22.7
0.00
0.00
12.5
12.5
15
11
0
1
8
5
2
3
0
0
0
1
1987
1988
28.4
28.5
110
1989
1990
1991
1992
27.7
27.6
27.9
26.8
34.1
33.9
33.8
33.2
22.0
21.6
22.5
21.3
224.03
1.02
0.00
0.00
13.3
13.4
14.0
14.1
9
6
12
15
0
0
0
0
8
2
9
13
2
8
6
2
0
1
0
0
0
0
1
1
1993
1994
1995
1996
28.1
28.5
28.4
28.3
34.0
34.8
34.8
34.7
22.6
23.0
22.8
22.7
0.00
0.00
0.00
0.00
14.7
14.1
13.2
14.2
15
2
3
14
1
1
0
1
6
2
3
21
2
0
4
5
0
1
0
0
0
0
0
0
1997
1998
27.9
28.6
34.5
35.2
22.2
22.7
0.00
0.00
12.8
12.2
6
7
1
2
7
9
3
0
0
0
0
0
1999
2000
28.7
28.1
35.5
34.8
23.0
22.6
0.00
0.00
11.6
13.3
6
3
2
0
7
9
2
5
0
0
0
0
2001
2002
2003
2004
28.6
28.7
28.8
28.5
35.4
35.4
35.4
35.2
23.0
23.0
23.2
22.7
0.00
0.00
0.00
0.00
13.8
13.7
12.8
12.9
7
4
8
5
1
0
0
0
8
4
8
6
2
3
3
1
0
0
0
0
0
0
0
0
2005
2006
28.7
35.2
23.1
0.25
13.8
3
0
6
5
0
0
2007
28.7
35.2
23.0
3.05
13.4
1
0
1
5
0
0
2008
2009
2010
28.9
28.9
29.5
35.5
35.4
36.4
23.3
23.4
23.7
134.87
196.33
101.34
12.4
12.1
10.3
7
8
9
0
0
0
7
12
14
1
2
2
0
0
0
0
0
0
2011
2012
2013
2014
28.5
29.2
29.3
29.6
34.6
35.1
34.3
34.7
22.9
23.8
24.6
25.0
80.77
24.63
1.52
48.53
12.9
13.4
13.4
13.4
10
5
2
9
0
0
0
0
10
10
7
12
2
1
0
1
0
0
0
0
0
0
0
0
City: Bishah
Year
T
1986
24.9
TM
32.6
Tm
16.4
PP
0.00
V
8.0
RA
17
SN
0
TS
18
FG
1
TN
0
GR
0
33.0
33.0
32.1
32.8
33.7
32.2
17.0
16.9
15.3
16.6
17.0
16.2
0.00
0.00
0.00
264.92
73.92
134.62
8.3
9.1
10.5
10.3
10.2
7.8
29
19
26
16
21
32
0
0
0
0
0
0
15
15
15
12
17
19
1
1
2
3
1
1
0
0
0
0
0
0
1
0
3
2
1
3
1987
1988
1989
1990
1991
1992
25.6
25.8
26.6
27.3
26.1
24.6
111
1993
1994
1995
1996
25.7
26.6
27.5
26.5
32.9
33.7
33.6
33.7
16.6
17.4
17.1
17.0
7.12
0.00
0.00
190.00
8.1
8.9
8.6
8.0
21
8
14
20
0
0
0
1
16
14
19
23
0
0
6
0
0
0
0
0
2
0
1
0
1997
1998
1999
25.5
27.3
28.0
33.3
34.3
34.5
17.2
17.6
17.5
29.97
26.92
0.00
7.7
8.0
9.7
40
21
8
2
2
0
46
20
12
0
1
0
0
0
0
0
0
0
2000
2001
28.2
27.7
34.7
34.4
17.9
17.3
0.00
0.00
9.6
11.7
11
12
0
0
14
18
0
0
0
0
0
0
2002
2003
2004
27.8
28.5
26.7
34.5
34.9
34.1
17.4
18.3
17.5
0.00
0.00
0.00
10.6
10.5
8.4
9
9
13
0
0
0
11
15
17
0
0
1
0
0
0
0
0
1
2005
2006
26.2
34.1
17.1
0.00
6.7
22
0
17
0
0
0
2007
26.4
34.2
17.6
33.51
7.0
7
0
21
1
0
0
2008
2009
2010
26.2
27.1
26.4
34.0
34.9
34.8
17.6
18.9
18.0
31.50
148.85
0.00
7.9
7.6
7.5
13
6
19
0
0
0
19
11
18
0
2
0
0
0
0
0
0
0
2011
2012
2013
2014
26.6
26.1
25.6
25.9
34.7
34.3
33.4
33.5
18.6
17.5
17.6
17.7
40.13
54.37
191.76
0.00
7.0
7.3
6.6
8.9
9
14
13
14
0
0
0
0
11
22
24
17
1
0
1
0
0
0
0
0
0
0
0
0
112