AN EFFICIENT GRAPH ALGORITHM FOR DOMINANCE CONSTRAINTS
advertisement

AN EFFICIENT GRAPH ALGORITHM
FOR DOMINANCE CONSTRAINTS∗
ERNST ALTHAUS† , DENYS DUCHIER‡ , ALEXANDER KOLLER§ , KURT MEHLHORN† ,
JOACHIM NIEHREN‡ , AND SVEN THIEL†
Abstract. Dominance constraints are logical descriptions of trees that are widely used in
computational linguistics. Their general satisfiability problem is known to be NP-complete. Here
we identify normal dominance constraints and present an efficient graph algorithm for testing their
satisfiablity in deterministic polynomial time. Previously, no polynomial time algorithm was known.
1. Introduction. The dominance relation of a tree is the ancestor relation between its nodes. Dominance constraints are logical descriptions of trees talking about
the dominance relation.
Dominance based tree descriptions were first used in automata theory in the sixties [TW67], rediscovered in computational linguistics in the early eighties [MHF83],
and investigated from a logical point of view in the early nineties [BRVS95]. Since
then, they have found numerous applications in computational linguistics: they have
been used for grammar formalisms [VS92, RVSW95, DT99, Per00], in natural language semantics [Mus95, ENRX98], and for discourse analysis [GW98].
The two most important computational tasks for dominance constraints are satisfiability testing – does the constraint describe a tree? – and enumerating solutions, i.e. the described trees. But as shown recently [KNT01], testing satisfiability
is an NP-complete problem. Earlier attempts at processing dominance constraints
[Cor94, VSWR95, DN00] all suffer from this fact. This has shed doubt on their
practical usefulness.
In this article, we identify normal dominance constraints, a natural subclass of
dominance constraints whose restrictions should be unproblematic for many applications. We present an efficient graph algorithm that decides satisfiability of normal
dominance constraints in deterministic polynomial time. Previously, no polynomial
time algorithm was known.
We derive the graph algorithm for testing satisfiability as follows. First, we introduce dominance graphs and define their configuration problem (investigated in
[ADK+ 01]). Second, we show that the configurability of dominance graphs is linear time equivalent to the satisfiability of normal dominance constraints (first shown
in [KMN00]). Third, we characterize the configurability of dominance graphs as the
absence of certain cycles, which we finally test for by reduction to a matching problem.
We also discuss how to use the efficient satisfiability test to enumerate solutions.
We apply a choice rule exhaustively while checking for satisfiability after each step.
Both procedures have been implemented in C++ using the LEDA library [MN99] and
applied to scope ambiguities in natural language semantics in the CLLS framework
[ENRX98, EKN01, EKN02].
∗ This article joins the results from two conference publications [ADK+ 01] and [KMN00]. The
authors are partially supported by the IST Programme of the EU under contract number IST1999-14186 (ALCOM-FT), and by the Collaborative Research Centre (SFB) 378 of the Deutsche
Forschungsgemeinschaft.
† Max-Planck-Institute for Computer Science, Saarbrücken, Germany
‡ Programming Systems Lab, Fachbereich Informatik, Universität des Saarlandes, Saarbrücken,
Germany
§ Department of Computational Linguistics, Universität des Saarlandes, Saarbrücken, Germany
1
∀x •
→ •
linguist •
∃2 y •
∧ •
lang •
•
x •
•
y •
speak •
x •
y •
Fig. 2.1. A simple dominance constraint.
∀x •
∃2 y •
→ •
linguist •
∧ •
lang •
∃2 y •
x •
lang •
y •
∧ •
speak •
x •
y •
∀x •
y •
linguist •
x •
→ •
speak •
x •
y •
Fig. 2.2. Readings represented by the constraint in Fig. 2.1.
To complement our results, we finally investigate a close variant of the configuration problem of dominance graphs where closed leaves are permitted in addition. This
variant is more general but also relevant for applications in computational linguistics
[Bos96, CFS97]. We show that configurability is already NP-complete for the more
general dominance graphs. Nevertheless, the presented algorithms can still help to
solve this alternative problem more efficiently.
Plan of the paper. The first part of the paper introduces dominance constraints:
We motivate using them in computational linguistics in Section 2; then we define
them in Section 3, discuss their satisfiability problem, and introduce the concepts of
normal dominance constraints and of solved forms. In the second part of the paper, we turn to a discussion of dominance graphs. We define them and relate them
to normal dominance constraints in Section 4. Section 5 presents a basic algorithm
for enumerating the solved forms of a dominance graph. Then we derive the abovementioned characterization of configurability in Section 6, show how to test for this
property efficiently in Section 7, and plug this efficient algorithm into the enumeration algorithm in Section 8. In the final part of the article, we apply this efficient
enumeration algorithm back to normal dominance constraints and discuss an implementation (Section 9), and prove that the more general configurability with closed
leaves is NP-complete (Section 10). Section 11 concludes and discusses further work.
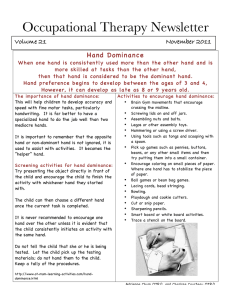
2. Motivation. As one of the many applications of dominance constraints in
computational linguistics, we will give a brief introduction to scope underspecification
[EKN01, AC92, Rey93, Bos96].
This application is concerned with coping with ambiguous sentences such as the
following:
(2.1)
Every linguist speaks two languages.
Sentence (2.1) is ambiguous because it has two different possible meanings, indicated by the continuations
(2.2)
. . . namely, English and Chinese.
2
say •
john •
∃u •
→ •
comp •
∀w •
•
•
u •
in •
w •
u •
→ •
∧ •
•
dept •
•
∃x •
∃y •
∧ •
∧ •
•
∧ •
•
repr •
w •
of •
x •
w •
∀z •
•
→ •
prod •
∧ •
spl •
x •
y •
see •
x •
y •
•
•
z •
of •
y •
z •
Fig. 2.3. A dominance constraint describing the meaning of (2.6).
(2.3)
. . . but not necessarily the same ones.
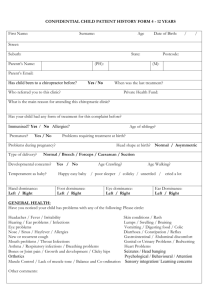
In the first reading, each linguist must speak the same two languages. In the second, no
two linguists necessarily speak a common language, but each speaks at least two. We
can represent the two possible meanings logically as the following first-order formulas,
which can be represented as trees as in Fig. 2.2.
(2.4)
∀x.(linguist(x) → ∃2 y.lang(y) ∧ speak(x, y))
(2.5)
∃2 y.lang(y) ∧ ∀x.(linguist(x) → speak(x, y))
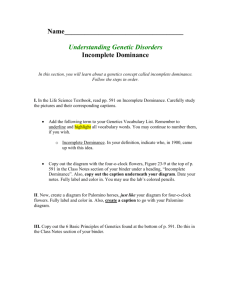
Ambiguity is a real problem to language processing because the number of readings of a sentence grows quickly with the number of “quantifiers” such as “every
linguist” and “two languages”, and interacts with other sources of ambiguity besides.
The sentence (2.6) has already 56 readings, and larger examples are easy to construct. 5
(2.6)
John says that some representative of every department in a company saw a
sample of each product.
The key observation to scope underspecification is that the differences between
the readings are very systematic; all contain the same “semantic material” (e.g. representations of the constituents “every linguist”, “two languages”, and “speak”), which
is only combined in different ways. The constraints on these combinations can be
specified using dominance constraints.
An example is Fig. 2.1. This constraint graph is a description of the two readings
of (2.1), shown in Fig. 2.2; it can be seen as a graphical representation of a dominance
constraint. Similarly, the 56 readings of (2.6) can be represented by the graph in
Fig. 2.3. In the paper, we will use constraint graphs to link the (logic) work on
dominance constraints to graph algorithms.
Pictures as in Fig. 2.3 are being drawn in most modern approaches to scope
underspecification. However, they are not always interpreted as dominance constraints
[Rey93, Bos96]. The subtle difference in meaning has the surprising effect of making
these other approaches NP-complete even when the graphs fall into the class where
dominance constraints have polynomial satisfiability. We will show this in Section 10.
3. Satisfiability of Dominance Constraints. In this section, we define the
the language of dominance constraints and recall known results on satisfiability. The
variant of dominance constraints we employ describes constructor trees – ground
5 The
following sentence from [Hob83], which is interesting both in form and in content, has around
200 readings: “Many people feel that most sentences exhibit too few quantifier scope ambiguities for
much effort to be devoted to this problem, but a casual inspection of several sentences from any text
should convince almost everyone otherwise.”
3
terms over a signature of function symbols – rather than feature trees as considered
in [Smo92, BRVS95, ST94, MNP00].
3.1. Trees and Constructor Trees. We assume a finite or infinite signature
Σ with function symbols f, g, . . ., each of which is equipped with an arity ar(f ) ≥ 0.
Constants are function symbols of arity 0 denoted by a, b. We assume that Σ contains
at least one constant and one symbol of arity at least 2.
A constructor tree can be defined either as a term or equivalently on the basis
of directed graphs. The ground term f (g(a, a)), for instance, corresponds to the
directed graph in Figure 3.1. Throughout this article, we will employ the graph based
definition.
An (unlabeled) tree is a forest with exactly one root.
f •
A forest is a finite directed graph (V, E) where V is a
g •
finite set of nodes denoted by u, v, w, and E ⊆ V × V
a set of edges such that the indegree of each node is at
a •
a •
most 1 and there is no cycle. Each forest has at least one
Fig. 3.1. f (g(a, a))
root, i.e. a node with indegree 0. We call the nodes with
outdegree 0 the leaves of the forest.
A (finite) constructor tree τ is a triple (V, E, L) consisting of a tree (V, E) and a
labeling function L : E ∪ V → Σ ∪ N s.t. L(E) ⊆ N (edge labels) and L(V ) ⊆ Σ (node
labels). The edge labels in a constructor tree determine the order of the children of
a node: for each node u ∈ V and each natural number 1 ≤ k ≤ ar(L(u)), there is
exactly one edge (u, v) ∈ E with L((u, v)) = k.
We draw constructor trees as in Figure 3.1, by annotating nodes with their labels
and ordering the edges such that their labels increase from left to right.
3.2. Constraint Language. The language of dominance constraints is a logical
language that is interpreted over the class of tree structures. Tree structures are
first-order model structures which specify certain relations between the nodes of a
construtor tree.
Let τ = (V, E, L) be a constructor tree with nodes u, v, v1 , . . . vn ∈ V . The
dominance relation uC∗ v holds in τ iff there is a path from u to v; the labeling relation
u:f (v1 , . . . , vn ) holds in τ iff u is labeled by the n-ary symbol f and has the children
v1 , . . . , vn in this order; that is, L(u) = f , ar(f ) = n, {(u, v1 ), . . . , (u, vn )} ⊆ E, and
L((u, vi )) = i for all 1 ≤ i ≤ n.
Definition 3.1 (Tree Structure). The tree structure of a constructor tree τ with
node set V is a first-order structure with domain V which provides the dominance
relation C∗ of τ and the labeling relation of τ for each function symbol f ∈ Σ.
Let Vars be an infinite set of (node) variables X, Y, Z, . . . A dominance constraint
ϕ is a conjunction of dominance, inequality, and labeling literals of the following form
where ar(f ) = n:
ϕ ::= ϕ ∧ ϕ0 | XC∗ Y | X6=Y | X:f (X1 , . . . , Xn )
We freely identify a constraint with the set of its literals. Let Var(ϕ) be the set of
variables of ϕ. A pair of a tree structure τ with node set V and a variable assignment
α : Var(ϕ) → V satisfies ϕ iff it satisfies all its literal in the obvious way. We say that
(τ, α) is a solution of ϕ in this case; ϕ is satisfiable if it has a solution.
For instance, the following constraint that happens to be unsatisfiable:
X:f (X1 , X2 ) ∧ X1 C∗ Y ∧ X2 C∗ Y.
4
It requires that node values of X1 and X2 are sisters that are both ancestors of
the node value of Y . This is clearly impossible in a tree, since trees cannot branch
upwards.
3.3. Constraint Graphs. We usually draw a dominance constraint as a constraint graph. For instance, the unsatisfiable constraint from above is drawn in Figure
3.2. It illustrates clearly that the constraint requires upward branching and thus
cannot be satisfied by any tree.
The nodes of a constraint graph are the
f •X
variables of the corresponding constraint. La• X1
• X2
beling constraints relate to solid edges called
tree edges. Dominance constraints are drawn
• Y
as dashed lines called dominance edges. As for
trees, we annotate labels to nodes of the graph
Fig. 3.2. The unsatisfiable constraint
∗
∗
and order tree edges from left to right. Note X:f (X1 , X2 ) ∧ X1 C Y ∧X2 C Y
that we ignore inequalities in constraint graphs.
We sometimes annotate variable names to the graph nodes. This is not always
necessary since all occurences of the same variable are always represented by a single
node in a constraint graph. We may thus freely omit variable names. In the motivating
example (Figure 2.3), for instance, we have omitted all variable names.
Constraint graphs motivate the following notions to talk about constraints. We
call a variable X labeled in a constraint ϕ if there exists a literal X:f (. . .) in ϕ. A
(solid) fragment of constraint ϕ is a maximal set of variables in ϕ that are pairwise
connected by labeling literals. A variable X is called a root of a fragment in ϕ if it
does not occur in child position of a labeling literal in ϕ, i.e. if there is no Z such that
Z:f (. . . X . . .) belongs to ϕ. A hole of a fragment is a variable in ϕ that is unlabeled
in ϕ. A leaf of a fragment is either a hole or a variable labeled by a constant, i.e. a
variable X with X:a in ϕ.
3.4. Satisfiability. We are interested in two natural problems concerning dominance constraints that are both motivated by our application: first of all we would
like to test satisfiablity, and second, we would like to enumerate all solutions of a
satisfiable dominance constraint.
The complexity of the satisfiability problem of dominance constraints was investigated in [KNT01] and shed doubts on their usefulness.
Theorem 3.2. Satisfiablitiy of dominance constraints is NP-complete.
Deciding satisfiability in non-deterministic polynomial time is quite simple: In a first
step one guesses whether XC∗ Y or ¬XC∗ Y for each two variables X, Y in a given
constraint. In a second step, one tests the consistency of these relationships.
The NP-hardness proof relies on the fact that solid fragments of a constraint
graph may overlap in a solution. This means that distinct labeled variables may be
assigned to the same node of a tree.
For illustration, consider the constraint X:f (X1 , X2 ) ∧
Y
f
Y :f (Y1 , Y2 ) ∧ Y C∗ X ∧ XC∗ Y1 whose graph is shown in
X
f
Figure 3.3. Every solution must map X to the same node
Y1 Y2
as either Y or Y1 . We say that X overlaps with Y or Y1 in
X1 X 2
a solution of this constraint.
We call an overlap proper if it involves two labeled variFig. 3.3. Overlap
ables. In the applications in computational linguistics, we
typically do not want proper overlap (but may accept overlaps of roots with holes).
5
The subclass of dominance constraints that excludes proper overlap (and fixes some
minor inconveniences) is the class of normal dominance constraints.
3.5. Normal Dominance Constraints. We next distinguish a fragment of
dominance constraints which we will show to have a polynomial time satisfiability
problem.
Definition 3.3 (Normal dominance constraint). A dominance constraint ϕ is
called normal iff for all variables X, Y ∈ Var(ϕ):
1. There is no proper overlap in solutions of ϕ: X6=Y in ϕ if X and Y are
distinct variables that are labeled in ϕ.
2. Solid fragments are tree shaped or cyclic: every variable in ϕ appears at most
once as a parent and at most once as a child in a labeling literal of ϕ.
3. Dominance edges go from holes to roots: if XC∗ Y in ϕ then X is unlabeled
in ϕ whereas Y is labeled but does not occur in child position in ϕ.
4. There are no empty fragments: every hole of ϕ occurs in some child position.
Conditions 1 and 4 say that only roots and holes have the permission to overlap
in a solution of a normal constraint. Distinct holes cannot overlap since they must
have distinct parents, which are labeled variables that cannot overlap. For a similar
reason, it is impossible that a hole overlaps with a labeled node that has a parent.
Condition 2 requires acyclic fragments to be tree shaped. This excludes many
constraints, as for instance X:f (Y, Y ), X:f (Y1 , Y2 )∧X:f (Z1 , Z2 ) or Y :f (X)∧Z:f (X).
The last two examples are particularly difficult to treat when subsumed by a larger
constraint: they entail equations (Y1 =Z1 , Y2 =Z2 , respectively Y =Z ) whose global
consequences are difficult to predict. W.l.o.g we can always restrict ourselves to
normal constraint with acyclic fragments. Other constraints are unsatisfiable anyway.
Condition 3 forbids to express equality through two side dominance: XC∗ Y ∧
∗
Y C X is not normal since a variable cannot be at the same time a root and a hole.
Condition 3 is also violated by the dominance edge XC∗ Y1 in the constraint from
overlap example in Fig. 3.3. It goes from a root to a hole, instead vice versa.
In the following theorem we state the main result of this article, which will follow
from the results presented in the succeeding sections.
Theorem 3.4. Satisfiability of normal dominance constraints can be decided in
deterministic polynomial time.
3.6. Solved Forms. We stated above that we would like to have an algorithm
that enumerates all solutions of a given normal dominance constraint. Interpreting
this proposition literally makes not much sense as the reader already might have
noticed. For instance, we can solve the constraint X:a by all trees that have a node
labeled by a. Indeed, every satisfiable constraint has an infinite number of solutions,
so that we probably do not want to enumerate all of them.
What we want to do is to enumerate all solved forms of a normal dominance
constraint instead of all solutions. The idea behind a solved form is that it should
be similar to a solution but not describe its irrelevant parts. For instance, X:a is a
perfect solved form since all its solutions can be easily read off from this constraint.
We will now define an appropriate notion of solved forms. In particular, it should
hold that a normal dominance constraint has a solution if and only if it has a solved
form. Given a constraint ϕ we define a relation Rϕ on the variables of ϕ that we call
the reachability relation of ϕ. This relation is the transitive closure of the following
relation:
{(X, Y ) | X:f (. . . , Y, . . .) ∈ ϕ or XC∗ Y ∈ ϕ}
6
We say that Y can be reached from X if (X, Y ) ∈ Rϕ . In this case, it clearly holds
that ϕ entails the dominance XC∗ Y .
Definition 3.5 (Solved Form). A normal dominance constraint ϕ is in solved
form if it satisfies the following two properties for all variables X, Y, Z in Var(ϕ):
1. Dominance edges do not branch upwards: if X and Y are distinct then not
both XC∗ Z in ϕ and Y C∗ Z in ϕ.
2. The graph of ϕ is acyclic: (X, X) 6∈ Rϕ .
In other words, a normal dominance constraint ϕ is in solved form if and only if
its constraint graph is a forest.
A solved form of a normal constraint ϕ is a normal constraint ϕ0 that is in solved
form, contains the same labeling literals as ϕ, and has a stronger reachability relation,
which means Rϕ ⊆ Rϕ0 .
Lemma 3.6. Every normal dominance constraint in solved form has a solution.
Proof. We have to construct a tree solution for a solved form ϕ. The idea is
that the constraint graph of a solved form is already a forest. It is sufficient to
transform this forest into a tree without dominance edges. This is quite simple given
the transformation illustrated in Figure 3.4. (Note that we assumed Σ to contain a
function symbol f of arity at least two and a constant a.)
In the first step, we turn the forest into a tree by adding a top most fragment.
Let Y1 , . . . , Ym be the minimal elements in the reachability order Rϕ which exist since
Rϕ is acyclic. We can then define a new solved form ϕ1 with a top most fragment,
by adding a new fragment to ϕ with a single hole with dominance edges towards all
roots Y1 , . . . , Ym .
In the second step we repeatedly transform dominance edges into tree edges. We
stop, once no dominance edge is left. The idea is illustrated in Figure 3.4. Recall
that we assumed that our signature contains a constant a and a function symbol
f of arity n ≥ 2. We will also use a function
V dist on constraints, which is defined
for all constraints ϕ0 by dist(ϕ0 ) = ϕ0 ∧ {X 6= Y | X, Y ∈ Var(ϕ0 ) distinct}.
Suppose that there still exists a hole X in ϕ1 from where dominance edges start.
Let Y1 , . . . , Ym be all the roots of ϕ1 such that the dominance literal XC∗ Yi belongs
to ϕ1 for i = 1, . . . , m. We construct ϕ2 by removing all these literals from ϕ1 and
distinguish two cases:
• If m > n, we fix a fresh variable Z and define:
^m
ZC∗ Yi )
ϕ3 = dist(ϕ2 ∧ X:f (Y1 , . . . , Yn−1 , Z) ∧
i=n
ϕ3 is a solved form that entails ϕ, and it contains n − 1 dominance literals
less than ϕ1 .
• If m ≤ n, we fix fresh variables Zm+1 , . . . , Zn and define:
^n
ϕ3 = dist(ϕ1 ∧ X:f (Y1 , . . . , Ym , Zm+1 , . . . , Zn ) ∧
Zj :a)
j=m+1
ϕ3 is a solved form that entails ϕ, and it contains m dominance literals less
than ϕ1 .
By applying the above transformation repeatedly, we obtain a solved form ϕ ∗ which
entails ϕ and contains no dominance literals.
In the third step we can easily satisfy ϕ∗ by the constructor tree that corresponds
to ϕ∗ itself.
In the construction of a solution of ϕ we had to ”invent” variables that are not
present ϕ. Thus the constructor tree in the solution contains nodes that do not
7
X
f
X
f
Y1
Y2
a
Y1
Y2
Y3
Y4
Y3
Y4
Fig. 3.4. Transforming dominance edges into tree edges. Here, 4 dominance edges are transformed while using a function symbol of arity 3.
correspond to variables of ϕ. In the following lemma we will show that every satisfiable normal constraint has a solved form and that it can essentially be obtained by
removing the invented material.
Lemma 3.7. Every solution of a normal dominance constraint ϕ also satisfies
some solved form of ϕ.
Proof. Let (α, τ ) be a solution of ϕ. In order to construct a solved form, we define
a partial function hole on the root variables of ϕ. Consider a root Y , the function
is defined if there is a hole X with α(X)C∗ α(Y ). Since τ is a tree, there is hole Z
such that α(Z)C∗ α(Y ) and α(X)C∗ α(Z) for all holes X with α(X)C∗ α(Y )6 . We set
hole(Y ) = Z. Let ϕl denote the conjunction of the labeling and inequality literals of
ϕ, then the following is a solved form of ϕ:
^
ϕ0 = ϕl ∧ {hole(Y )C∗ Y | Y is a root for which hole is defined}
Clearly, ϕ0 is a normal constraint in solved form. We have to show Rϕ ⊆ Rϕ0 .
Since both constraints have the same labeling literals, it suffices to prove for every
dominance literal XC∗ Y in ϕ that (X, Y ) ∈ Rϕ0 . We will show a stronger statement:
if X is a hole and Y is a root with α(X)C∗ α(Y ), then (X, Y ) ∈ Rϕ0 .
We proceed by induction on the length of the path from α(X) to α(Y ). For
Z = hole(Y ), we have α(X)C∗ α(Z). If X = Z, the claim holds. Otherwise, let R
denote the root of the fragment of Z. The hole X can only overlap with a root, so
we get α(X)C∗ α(R). As α(R) 6= α(Z), we can apply the induction hypothesis and
obtain (X, R) ∈ Rϕ0 . Since (R, Z) and (Z, Y ) belong to Rϕ0 , the claim follows from
the transitivity of the reachability relation.
The validity of Lemma 3.7 heavily depends on the
absence of proper overlaps (Condition 1 of Def. 3.3).
This is illustrated by the following example:
X:f (X1 , X2 ) ∧ Y :f (Y1 , Y2 ) ∧
2
^
f •X
• X1
X2 •
f •Y
∗
∗
(Xi C Zi ∧ Yi C Zi ∧ Zi :a)
• Y1
Y2 •
i=1
a • Z1
a • Z2
This constraint satisfies all normality conditions except
for the overlap restriction. It also has a solution but no
solved form. The reason for this problem is that X and Y overlap properly in all
solutions of this constraint.
The combination of Lemmas 3.6 and 3.7 yields the following proposition, which
justifies computing with solved forms instead of solutions:
Proposition 3.8. A normal dominance constraint has a solved form if and only
if it is satisfiable.
6 So either α(Z) = α(Y ) (i.e. Y is plugged into Z) or α(Z) is the lowest proper ancestor of α(Y )
for which α−1 is defined (i.e. which is not ”invented”).
8
4. Configurability of Dominance Graphs. For the satisfiability problem it
turns out that we do not have to consider any labels. If we delete all labels from the
constraint graph but keep the information whether an edge is a tree or a dominance
edge, we get a dominance graph (given two minor assumptions):
Definition 4.1 (Dominance Graph). A dominance graph is a directed graph
G = (V, E ∪˙ D) satisfying the following two conditions:
1. The graph G = (V, E) defines a collection T of node disjoint trees of height
at least 1.
2. Each edge in D goes from a leaf of some tree in the collection to the root of
some tree in the collection.
We will use analogous notions for dominance and constraint graphs: The edges
in E are called tree edges, and the edges in D are called dominance edges. A leaf is a
node with no outgoing tree edge and a root is a node with no incoming tree edge. A
dominance edge d = (v, w) is redundant if there is a path from v to w in G \ d. The
reachability relation RG of a dominance graph G = (V, E ∪˙ D) is the set of all pairs
(u, v) such that there is a (directed) path from u to v in G, i.e. RG is the transitive
closure of the binary relation induced by the edge set of G.
We need a new notation that replaces the notion of a solution in the logical sense.
Now the idea is that we want to assemble the trees in T by plugging roots into leaves.
Definition 4.2. We say that a dominance graph G is a configuration iff it is
a forest and the edges in D form a matching, i.e. every node of G is incident to at
most one edge of D.7
We call a dominance graph G0 = (V 0 , E 0 ∪˙ D 0 ) a configuration of G iff V = V 0 ,
E = E 0 , G0 is a configuration, and RG ⊆ RG0 , i.e. G0 realizes all dominance edges in
G. A dominance graph is configurable if it has a configuration.
4.1. Solved forms. In the sequel we will prove the equivalence of the configurability problem for dominance graphs and the satisfiability problem for normal
dominance constraints (Lemma 4.5). In order to do so, we extend the notion of solved
forms to dominance graphs.
Definition 4.3. A dominance graph G is in solved form iff it is a forest.
By definition, every configuration is a solved form. Unlike a configuration, a
solved form does not require its dominance edges to form a matching.
We call a dominance graph G0 = (V 0 , E 0 ∪˙ D 0 ) a solved form of G iff V = V 0 ,
E = E 0 , G0 is a solved form and RG ⊆ RG0 . A dominance graph is solvable if it has
a solved form. The following lemma shows that configurability and solvability are
equivalent for dominance graphs.
Lemma 4.4. Every dominance graph in solved form is configurable.
Proof. For the proof, we define a problem leaf to be a leaf with more than one
outgoing dominance edge; our aim will be to eliminate problem leaves from solved
forms.
The proof is by induction on weights (d, a) of graphs G, where d is the negative
minimum depth of a problem leaf of G (or −∞ if there is none), and a is the total number of dominance edges emanating from problem leaves of minimum depth
(potentially 0). We consider the lexicographic order on these weights.
Solved forms without problem leaves (i.e. with weight (−∞, 0)) are configurations,
so the lemma is trivially true in this case. So let G be a solved form that does have
7 And hence D defines a partial function from roots to holes which specifies for every matched
root where to plug it.
9
t0
t0
l0
l0
r
z1
r
t
t
l
l
z1
zk
zk
Fig. 4.1. Application of Rule 1: All dominance edges of l 0 except for (l0 , r) are shifted down to
the leaf l.
problem leaves. Let G have weight (d, a), and assume that we know that all solved
forms of lower weight do have configurations. Then we can apply the following rule
to a problem leaf l0 of minimum depth:
Simplification Rule 1. Let e = (l0 , r) be a dominance edge from the leaf l 0 of a
tree t0 to the root r of a tree t. Let l be an arbitrary leaf of t. Change any dominance
edge (l0 , z) with z 6= r into (l, z), see Figure 4.1.
The result G0 is still in solved form, and its weight is strictly lower than that of
G; so by the induction hypothesis, G0 has a configuration Gc . But Gc also realizes all
dominance edges of G. This is obvious for (l 0 , r) and for all dominance edges which
do not start in l0 . For an edge (l0 , z) with z 6= r we note that this edge is realized
because there is a path from l0 to l in G0 and Gc realizes the edge (l, z). So G has a
configuration as well.
4.2. Dominance Graphs of Normal Constraints. We now map normal dominance constraints to dominance graphs while ignoring labelings.
Let ϕ be a normal dominance constraint. We define a graph G(ϕ) = (Var(ϕ), E ∪˙
D), where the set of tree edges E and dominance edges D are defined as follows:
E
D
= {(X, Xi ) | X:f (X1 , . . . , Xn ) in ϕ, 1 ≤ i ≤ n}
= {(X, Y ) | XC∗ Y in ϕ}
Lemma 4.5. For a normal dominance constraint ϕ the following holds if none of
its roots is labeled by a constant and if all its fragments are acyclic.
1. The graph G(ϕ) is a dominance graph.
2. The relations Rϕ and RG(ϕ) are equal.
3. ϕ is in solved form iff G(ϕ) is.
4. If ϕ0 is a solved form of ϕ then G(ϕ0 ) is a solved form of G(ϕ) and vice versa.
Proof. We will proof the statements one by one:
1. Conditions 1 and 2 of Definition 3.3 ensure that all acyclic fragments of ϕ are
trees. Since we assumed all fragments to be acyclic, it follows that (Var(ϕ), E)
is a collection of node-disjoint trees. The roots of these trees must also be
roots of fragments in ϕ since there are no empty fragments by Condition 4.
This shows that the height of all trees in G(ϕ) is at least one. And finally,
from Condition 3 we can conclude that dominance edges can only go from
leaves to roots.
10
2. We have equality since both relations are defined as the transitive closure of
the same set.
3. Only the roots of the normal constraint ϕ may have more than one incoming
edge in G(ϕ) all of which are dominance edges. But every root in a solved
form has by definition at most one incoming dominance edge. Since solved
forms are acyclic by definition, it follows that their graphs are always forests
and thus in solved form. The converse implication is obvious.
4. This an immediate consequence of the previous statements and the definitions
of solved form for normal dominance constraints and dominance graphs.
We call a dominance graph G arity consistent if for all nodes v of G there exists a
function symbol f ∈ Σ such that the number of tree edges emanating from v is equal
to the arity of f .
Lemma 4.6. For every arity consistent dominance graph G there exists a normal
dominance constraint ϕ such that G(ϕ) = G.
This lemma is obvious. The following theorem summarizes our results of the
previous two lemmas:
Theorem 4.7. The following four problems are linear time equivalent:
1. Satisfiability of normal dominance constraints.
2. Existence of solved forms for normal dominance constraints.
3. Existence of solved forms for dominance graphs.
4. Configurability of dominance graphs.
Proof. We have to check the application conditions of Lemmas 4.5 and 4.6.
1. We can always assume fragments to be acyclic. The existence of cycles can
be checked easily in linear time, and normal constraints with cycles are unsatisfiable anyway.
2. We can assume that normal dominance constraints do not contain roots that
are labeled by constants.
Otherwise, we can replace the fragment X:a by
V
X:f (X1 , . . . , Xn ) ∧ ni=1 Xi :a for some fresh variables X1 , . . . , Xn and sufficiently many inequalities. This operation requires constant time and clearly
preserves normality,but also satisfiability as the inner structure of fragments
is anyway irrelevant for the satisfiability of normal constraints.
3. We can make all dominance graphs arity consistent with a similar transformation as in the proof of Lemma 3.6 (see also Figure 3.4). We use the fact
that we have a function symbol of arity n ≥ 2 and a constant symbol (which
has arity 0). Let u denote a node in a dominance graph G with children
v1 , . . . , vm . If m 6= n and m 6= 0, we can apply one of the following transformations:
• Case 0 < m < n:
Add new nodes vm+1 , . . . , vn and the edges (u, vm+1 ), . . . , (u, vn ) to G.
Then u and the newly added nodes are arity consistent.
• Case m > n:
Add a new node u0 and make u0 a child of u by adding the edge (u, u0 ).
Then shift the children vn , . . . , vm of u down to u0 by replacing the
edges (u, vn ), . . . , (u, vm ) with the edges (u0 , vn ), . . . (u0 , vm ). After that
u is arity consistent, and the out-degree of u0 is less than that of u. If u0
is not arity-consistent, we apply the appropriate transformation to u0 .
We see that the transformations preserve satisfiability because only the inner
structure of the fragments changes, but the reachability relation (restricted to
11
r0
r
l0
l
r0
r
l0
l
v
v
r0
r
l0
l
v
Fig. 5.1. Two graphs H, H 0 are generated by applying the choice rule to the graph G on the
left hand side.
the original nodes) remains the same. Since n is a constant, the time required
to make u arity consistent (including recursive transformations) is O(m).
5. Enumeration of Minimal Solved Forms. Now that we have reduced the
problem of solving normal dominance constraints to the problem of finding solved
forms of dominance graphs, we show in this section how to enumerate solved forms of
a dominance graph G. We are interested in solved forms that contain no unnecessary
dominance edges. Let G0 be a solved form of G that is transitively reduced. We call G0
a minimal solved form of G if there is no solved form of G whose reachability relation
is strictly contained in RG0 . Our algorithm below enumerates exactly the minimal
solved forms of G. However, the algorithm may take exponential time to produce
even a single solved form because it blindly enumerates all cases. Using the efficient
configurability test we derive in Sections 6 and 7, we will optimize this algorithm to
enumerate solved forms in polynomial time per solved form (Section 8).
The enumeration algorithm applies the following simplification rules:
Simplification Rule 2 (Redundancy Elimination). All redundant dominance
edges, i.e. edges that are implied by transitivity, can be removed. In particular, parallel
edges can be combined into one.
Simplification Rule 3 (Choice). Let v be a root with at least two incoming
dominance edges (l, v) and (l 0 , v) and let r and r 0 be the roots of the trees containing
leaves l and l0 , respectively. Generate two new graphs H and H 0 by adding either
(l0 , r) or (l, r 0 ) to D, see Figure 5.1.
The enumeration of the solved forms can be carried out by a recursive algorithm:
1. Make the graph reduced, i.e. apply Rule 2.
2. If the graph contains a (directed) cycle, terminate this recursion since the
graph has no configuration.
3. If the graph is in solved form, report it and terminate this recursion.
4. Otherwise, apply the choice rule and apply the algorithm to the two newly
generated graphs.
We will now prove that the algorithm is correct. First we observe that if the
algorithm does not report a solved form in the third step, then the graph is acyclic,
but not a forest. And hence, there must be node v with two incoming edges. It is easy
to see that this can only be root, which implies that the choice rule can be applied to
v.
Now we analyze the effect of the simplification rules on the set of solved forms.
12
The removal of redundant edges (Rule 2) does not change the reachability relation,
which implies that the solved forms remain the same, too. An application of the choice
rule (Rule 3) increases the reachability relation and partitions the set of solved forms
in two disjoint sets: In a solved form S of G the nodes l and l 0 are both ancestors of v
and therefore either l0 is ancestor of l and hence of r or vice versa. This implies that
S is either a solved form of H or of H 0 .
From this we conclude that every enumerated solved form is indeed a solved form
of the original graph. On the other hand, we see that for every solved form S there
exists exactly one solved form S 0 such that S 0 is enumerated by the algorithm and its
reachability relation has the property RS 0 ⊆ RS . If S is minimal, we get RS 0 = RS ,
and since both graphs are transitively reduced and acyclic, we obtain S 0 = S. Thus
the algorithm enumerates at least all minimal solved forms.
What remains to show is that all enumerated solved forms are minimal. So let S
be solved form that is reported by the algorithm. Assume that S is not minimal, i.e.
there exists a solved form S 0 with RS 0 ⊂ RS . Since both S and S 0 are enumerated
there must be a step in the computation which ”separated” the two graphs. This
means there is an application of the choice rule which generated two graphs H and
H 0 such that RH ⊆ RS and RH 0 ⊆ RS 0 . From RS 0 ⊂ RS we infer RH 0 ⊆ RS . Since
RS cannot contain both RH 0 and RH , we have a contradiction.
To prove termination, we derive an upper bound for the maximum recursion
depth. We reconsider the reachability
relation RG of a graph G. If G is acyclic, the
of nodes in G. Thus,
cardinality of RG is at most n2 ≤ n2 , where n is the number
whenever the size of the relation becomes greater than n2 , the recursion terminates
immediately. But if we apply the choice rule to a reduced, acyclic dominance graph,
the size of the relation increases strictly, i.e. |RG | < min(|RH |, |RH 0 |). This is because
RH ⊇ RG , and (l0 , r) ∈ RH but (l0 , r) cannot be in RG , otherwise (l0 , v) would have
been redundant. A similar argument holds for H 0 .
6. Characterization of the Existence of Solved Forms. We give a graph
theoretic characterization of solvability; as this is equivalent to configurability by
Lemma 4.4, the result carries over to configurability.
The undirected dominance graph Gu = (V, Eu ∪˙ Du ) corresponding to the dominance graph G = (V, E ∪˙ D) is the undirected graph obtained by making all edges
of G undirected. More precisely, we set Eu = {({u, v}, tree) ; (u, v) ∈ E } and define
Du = {({u, v}, dom) ; (u, v) ∈ D}. This explicit distinction is important. Consider
the dominance graph consisting of the two nodes r and l, the tree edge (r, l) and the
dominance edge (l, r). If there were no explicit distinction, then both edges would
correspond to the same undirected edge. However, when we talk about undirected
edges in the sequel, we will only state the first component because it will be clear
whether we refer to a tree or a dominance edge.
Now, we want to define the notion of a cycle in an undirected graph, which may
differ from the reader’s usual notion. A cycle C in an undirected graph is a sequence
[v0 , e0 , v1 , e1 , . . . , en−1 , vn ] of nodes v0 , . . . , vn and edges e0 , . . . , en−1 with n ≥ 2 such
that v0 = vn and for i = 0, . . . , n − 1 the edge ei is incident to vi and vi+1 , and
ei 6= e(i+1) mod n . This means we require a cycle to consist of at least 2 edges, we do
not exclude that a cycle uses a node or an edge more than once, however any two
consecutive edges must be distinct. We call C edge-simple if the edges in the sequence
are pairwise different. C is said to be simple if all the visited nodes v0 , . . . , vn−1 (and
hence also the edges) are pairwise different. Usually, we are not interested in the
sequence of nodes and we identify C with the sequence e0 ◦ e1 ◦ . . . ◦ en−1 of its edges.
13
2
1
3
1
2
4
3
5
6
4
7
6
5
7
Fig. 6.1. A solvable dominance graph and one of its solved forms. The graph contains an
undirected cycle, but no hypernormal cycle.
6.1. Hypernormal Dominance Graphs.
Let us first investigate a simpler subproblem of the solvability problem. A dominance
graph G = (V, E ∪˙ D) is hypernormal if for every leaf l in (V, E) there is at most one
dominance edge (l, .) in D.
Proposition 6.1. Let G = (V, E ∪˙ D) be a hypernormal dominance graph. If
Gu contains a cycle then G is unsolvable.
Proof. The proof is by induction on the minimal number k of dominance edges
in a simple cycle C of Gu . Clearly, the case k = 0 cannot occur. If k = 1 then there
exists a dominance edge from a leaf l to the root of the fragment of l, and hence
G is not solvable. For k > 1, assume that we know the result to be true for k − 1.
C either does not contain any nodes at which its edges change directions; then it is
also a cycle in G and hence, G is clearly unsolvable. Or C does change directions,
then it must contain two dominance edges (l, r) and (l 0 , r) into the same root. Both
results of applying the choice rule produce graphs with a simple cycle containing k − 1
dominance edges, so both are unsolvable. But then, G must be unsolvable as well.
The converse of the above proposition is also true. If G is not solvable, then G u
contains a cycle. This statement will be a corollary of Theorem 6.2, which we will
prove below.
6.2. Dominance Graphs.
The Proposition 6.1 does not carry over literally to the general case: Figure 6.1 is a
counterexample. In order to state our theorem for the general case, we call a subgraph
Hu of Gu hypernormal if the corresponding directed subgraph H of G is hypernormal.
In particular, a hypernormal cycle in Gu is a cycle that contains for every leaf l at
most one incident dominance edge.
Theorem 6.2. Let G = (V, E ∪˙ D) be a dominance graph.
(a) G is solvable iff Gu does not contain a hypernormal cycle.
(b) G is solvable iff every hypernormal subgraph of G is.
Note that this implies that a graph G is configurable iff Gu has no hypernormal
cycle, by Lemma 4.4.
Proof. Part (b) follows immediately from part (a). If some hypernormal subgraph
of G is unsolvable, G is unsolvable. If every hypernormal subgraph of G is solvable,
Gu contains no hypernormal cycle, and hence G is solvable by part (a). We turn to
part (a).
14
Assume first that Gu contains a hypernormal cycle C. Let D 0 be the dominance
edges of G corresponding to edges in C. Then G0 = (V, E ∪˙ D 0 ) is a hypernormal
dominance graph such that G0u contains C. By Proposition 6.1, G0 is unsolvable and
hence G is unsolvable.
It remains to prove the converse: If G is unsolvable, Gu contains a simple hypernormal cycle. Suppose we run the algorithm of Section 5 on G. The computation of
this algorithm can be modeled as a binary tree. We label every node x with a dominance graph D(x). The root of the computation tree is labelled with G. Whenever
the algorithm applies the choice rule and generates two new dominance graphs, we
grow the tree by attaching two new nodes at the current node and label each node
with one of the two new dominance graphs. Since G is unsolvable, the leaves of the
tree are labelled with graphs that contain directed cycles.
For every node x in the tree we will show that D(x)u contains a simple hypernormal cycle. We prove this by induction on the height of x in the computation tree.
If the height is 0, then x is a leaf and the claim clearly holds, for any simple directed
cycle translates to an (undirected) simple hypernormal cycle.
Assume now, that the height is greater than 0. So x has two children labelled with
the graphs H and H 0 . The two graphs have been generated by an application of the
choice rule to D(x). And by the induction hypothesis we may assume that both Hu
and Hu0 contain a simple hypernormal cycle. Suppose that v is the root and that
(l, v) and (l0 , v) are the edges considered in the above application of the choice rule.
Let r be the root of the tree with the leaf l and r 0 be the root of the tree with the
leaf l0 . We have a simple hypernormal cycle C1 in Hu which uses the dominance
edge {r, l0 }. So the tree edge {l0 , r 0 } must also belong to C1 , and hence we may
assume C1 = {r, l0 } ◦ {l0 , r 0 } ◦ P1 . Similarly, Hu0 contains a simple hypernormal cycle
C2 = {r 0 , l} ◦ {l, r} ◦ P2 .
If P1 or P2 visits v, we can construct a hypernormal cycle in Gu . Suppose P1 =
P 0 ◦ P 00 such that P 0 ends in v. Then P 0 ◦ {v, l0 } ◦ {l0 , r 0 } is a simple hypernormal
cycle because P 0 avoids l0 . (If P2 visits v, we can apply a similar argument.)
So we may assume that both C1 and C2 avoid v. Let w denote the first node
on P1 different from r 0 that also lies on P2 . (The node w may be equal to r.) We
decompose P1 and P2 such that Pi = Qi ◦ Ri , Qi ends at w and Ri starts at w. Q1 is
a path from r 0 to w, and R2 is a path from w to r 0 . By the choice of w, we have that
Q1 ◦ R2 is a simple cycle.
If it is not hypernormal, then we are in the situation of Figure 6.2: w is a leaf,
Q1 ends with a dominance edge and R2 starts with a dominance edge. Since P2 is
hypernormal, Q2 ends with the tree edge incident to w. Now we consider the cycle
0 0
0
C = Q2 ◦ Qrev
1 ◦ {r , l } ◦ {l , v} ◦ {v, l} ◦ {l, r}. Obviously, any two consecutive edges
on C are hypernormal. So it remains to prove that C is simple, i.e. we have to
show that Q1 and Q2 avoid l0 and l. Since P1 avoids l0 and P2 avoids l, we have
l0 6= w 6= l, Q1 avoids l0 and Q2 avoids l. We show now that Q1 also avoids l. Assume
the hypernormal cycle C1 visits l, then it must use the tree edge e = {l, r}. As C1 is
simple, P1 ends with e. Recall that Q1 ends with w. Since w 6= l and w 6= r (w is a
leaf), the prefix Q1 of P1 ends before l is visited by P1 . A similar argument proves
that Q2 avoids l0 . Thus C is a simple hypernormal cycle in D(x)u .
7. Testing for Hypernormal Cycles. Now we show how to test for the presence of hypernormal cycles in a dominance graph in polynomial time. This immediately gives us a polynomial algorithm for testing solvability (and hence, configurability) of dominance graphs.
15
Q1
root
Q2
r’
w
r
root
R2
l
l’
v
root
Fig. 6.2. Construction of a simple hypernormal cycle in the proof of Theorem 6.2.
We reduce the problem to a matching problem in an auxiliary graph. First, we
want to recall some basic definitions from matching theory. A matching M in a graph
H is a set of edges of H such that every node of H is incident to at most one edge
in M . We call the edges in M matching edges and the other edges non-matching
edges. An alternating path with respect to M is a (simple) path which alternately
uses a matching edge and a non-matching edge. An alternating cycle is a cycle (of
even length) which is an alternating path.
For the test we construct the following auxiliary graph A. For every edge e =
{v, w} ∈ Gu we have two nodes ev = ({v, w}, v) and ew = ({v, w}, w) in A. Before
we define the edges of A, we want to introduce some more definitions. Let v denote a
node of Gu , we call a pair of distinct edges e = {u, v} and f = {v, w} incident to v a
bend at v and denote it by he, v, f i. The bend is called a hypernormal bend if either
v is not a leaf or v is a leaf and either e or f is the tree edge incident to v. Now we
are ready to define the edge set of A. We have two types of edges:
(a) For every edge e = {v, w} we have the edge a(e) = {ev , ew }.
(b) For every hypernormal bend he, v, f i we have the edge b(he, v, f i) = {e v , fv }.
Clearly, the edges of type (a) form a perfect matching M in A. The following
lemma shows how hypernormal cycles in Gu are related to the auxiliary graph A:
Lemma 7.1. The graph Gu contains a hypernormal cycle iff the graph A contains
an alternating cycle with respect to M .
Proof. Suppose first that Gu contains a hypernormal cycle C. We may assume
that C is simple. Every pair of consecutive edges on C is a hypernormal bend.
Suppose C = e0 ◦ e1 ◦ . . . ◦ en−1 , where ei = {vi , v(i+1) mod n } for i = 0, . . . , n − 1.
Then C 0 = a(e0 ) ◦ b(he0 , v1 , e1 i) ◦ a(e1 ) ◦ . . . ◦ a(en−1 ) ◦ b(hen1 , v0 , e0 i) is an alternating
cycle in A.
Suppose next that A contains an alternating cycle C 0 . Look at an edge of type (b)
and its neighboring edges of type (a): a(e) ◦ b(hf, v, gi) ◦ a(h). From the construction
of A we can conclude that either e = f and h = g, or e = g and h = f . Hence he, v, hi
is a hypernormal bend at node v. So if we delete all the edges of type (b) from C 0 we
get a sequence a(e0 ) ◦ . . . ◦ a(en−1 ) of type (a) edges. Then C = e0 ◦ . . . ◦ en−1 is an
edge-simple cycle and any pair of consecutive edges is a hypernormal bend. Now fix
any leaf l visited by C. Every hypernormal bend at l contains the tree edge incident
to l, and since C is edge-simple, we can conclude that C visits l only once and hence
contains only one dominance edge incident to l. This proves that C is a hypernormal
cycle in Gu .
16
Gabow et al. [GKT01] gave an algorithm which can decide whether A contains
an alternating cycle with respect to M in time O(m0 ), where m0 is the number of
edges in A. Now, we want to bound the size of the auxiliary graph A. We assume
that all non-leaves in the dominance graph G have outdegree at most two8 . Observe
that we have one edge of type (a) for every edge of G. For the edges of type (b) we
count the number of hypernormal
bends at a node v. For a leaf we get outdegv , and
v
for a non-leafPwe have deg
.
Thus
the auxiliary graph A has n0 = 2m nodes and
2
0
2
m = O(m + v∈V (indegv + 2) ) edges. Let us assume that G is transitively reduced.
Then we have no parallel edges, and hence a root r with indegree greater than n must
have two dominance edges from different leaves of the same tree to r, which is trivial
to recognize in time O(m). So we can assume that the indegree of any root is at most
n. LetPus say that we have r ≤ n roots and let di be the indegree of the
We
P i-th root.
2
(2
+
d
)
?
We
have ri=1 di ≤ m and
d
≤
n.
What
is
the
maximum
value
of
S
=
i
i
i
P
P
have S = O(n+m)+ i d2i . The sum i d2i is maximized if we make the di s as unequal
as possible. So we attain the
P maximum if we set m/n of the di s equal to n and all
others equal to zero. Thus v∈V (2 + indegv )2 = O(n + m) + O(m/n · n2 ) = O(nm).
The dominance graphs that arise in our linguistic applications have the following
properties: m = O(n) and the indegrees are bounded (the outdegrees are not), and
hence the auxiliary graph has n0 = O(n) nodes and m0 = O(n) edges.
We summarize the results of this chapter in the following theorem.
Theorem 7.2. The existence of a hypernormal
cycle in a dominance graph can
P
be decided in time O(m0 ), where m0 = O(m) + v∈V (2 + indegv )2 = O(nm).
8. Efficient Enumeration. A first application of the solvability test from the
previous section is to make the enumeration of solved forms more efficient. We modify
the enumeration algorithm from Section 5 by testing for (undirected) hypernormal
cycles in step 2 instead of directed arbitrary cycles. The recursion will terminate
immediately once the graph becomes unconfigurable, and we know that the recursion
depth is bounded by n2 . Thus:
Corollary 8.1. A solved form of a solvable dominance graph can be constructed
in time O(n3 m). If a dominance graph has N minimal solved forms, they can be
enumerated in time O(N n3 m).
Note that N can still be exponential in n. Also note that we can get configurations
instead of solved forms in the same asymptotic time, by applying Lemma 4.4: Simplification Rule 1 can only be applied at most n2 times either, by a similar argument
about the reachability relation.
8.1. Incremental Redundancy Elimination. The enumeration algorithm in
Section 5 has to maintain the transitive reduction of the dominance graph G. This
can be done in time O(nm) (see [GK79, Sim88]). But for all recursive calls of the
algorithm the reduction can be computed much faster, only the top-level needs to do
the full-fledged reduction. This is because the instances on which recursive calls work
are just reduced graphs where one irredundant edge has been added.
So we are faced with the following problem: We are given a reduced dominance
graph G and an irredundant dominance edge d = (s, t) which is not contained in G,
and we are to compute all edges of G which become redundant by the insertion of d
into G. An edge e = (v, w) of G becomes redundant iff there is a path P from v to
8 We can replace each non-leaf with outdegree more than two and its children by a small binary
tree. This construction increases the number of nodes and the number of edges only by a constant
factor.
17
1
2
k
...
Fig. 9.1. Embedded chain of length k.
k
3
4
5
6
7
8
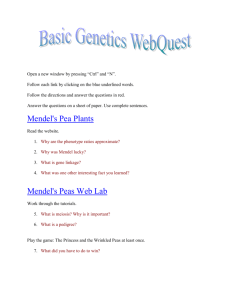
N
5
14
42
132
429
1430
Time (new)
20
190
1210
4130
16630
255000
Time (old)
180
670
5900
12740
46340
n/a
Fig. 9.2. Runtimes on embedded chains of length k. N is the respective number of configurations. Times are in milliseconds CPU time.
w in the graph G ∪ d. Since G is reduced, P must use the edge d. And hence e is
redundant iff in G there is a path from v to s and a path from t to w. Further, we
observe that if G ∪ d is cyclic then any cycle must use the edge d. And hence G ∪ d is
cyclic iff there is a node v such that in G there is a path from v to s and a path from
t to v. Thus we can make G ∪ d reduced and test its acyclicity with the following
algorithm:
• Start a depth first search in G at the node t and color all reachable nodes red.
• Start a depth first search in Grev at the node s and color all reachable nodes
green. (Grev is obtained from G by reversing all the edges.)
• If there is a two-colored node v, report that G ∪ d is cyclic and stop.
• Delete all edges with red target node and green source node, and insert the
edge d.
It is easy to see that the running time of the algorithm is O(n + m). Note that this
improvement does not lead to a better asymptotic running time of the enumeration
algorithm, but it has shown considerable impact in practice.
9. Implementation and Evaluation. Going back to the application in computational linguistics described in the introduction, the algorithm for enumerating solved
forms that we have just sketched gives us a straightforward algorithm for enumerating the minimal solved forms9 of a normal dominance constraint ϕ: We only need to
run it on G(ϕ) and translate the solved forms back to solved forms of the constraint.
We have implemented this algorithm, and this gives us a significant improvement in
runtimes over earlier solvers for dominance constraints. By way of example, consider
the dominance graph in Figure 9.1. This graph is an embedded chain of length k.
Such graphs appear in the application; for instance, the graph for “John says that
every linguist speaks two languages” is an embedded chain of length 2. Runtimes for
enumerating all configurations of embedded chains of various lengths (on a 550 MHz
Pentium III) are displayed in Figure 9.2. In the table, “new” refers to the algorithm
9A
solved form ϕ0 of ϕ is called minimal iff G(ϕ0 ) is a minimal solved form of G(ϕ).
18
l
1
B+1
T
m
t1
t2
t3m
B+1
Fig. 10.1. The dominance graph constructed in the reduction of 3-partition.
sketched above; “old” refers to the dominance constraint solver described in [DG01].
10. Dominance Graphs with Closed Leaves. A slight extension of the configuration problem by closed leaves becomes NP-complete again. This is interesting in
its own right because it shows where the frontier between polynomial and NP-complete
is. It is also interesting in the application to computational linguistics because some
approaches interpret graphs as in Fig. 2.3 as dominance graphs with closed leaves
instead of dominance constraints.
A dominance graph with closed leaves is given by a dominance graph G = (V, E ∪˙
D) and a set L of leaves. The members of L are called closed, all other leaves are
called open. Closed leaves cannot be the source of dominance edges. A solved form
of (G, L) with closed leaves L is a solved form G0 = (V, E ∪ D 0 ) of G which has the
additional property that there is no edge (l, v) ∈ E 0 with l ∈ L, but there is an edge
(l, v) ∈ D 0 for every l ∈
/ L. In other words, it is not allowed to attach a tree to a
closed leaf, and every open leaf must be “plugged” with some other tree. We show
that the configuration problem of dominance graphs with closed leaves is NP-complete
by reducing the 3-partition problem to it.10
Fact 1 (3-partition). Let A denote a multiset {a1 , . . . , a3m } of integers and
P3m
B ∈ N such that B/4 < ai < B/2 for all i; and
i=1 ai = mB. The
P question is
whether there is a partition A1 ] . . . ] Am of A such that for all i, a∈Ai a = B.
The problem is NP-complete in the strong sense [GJ79, problem SP15, page 224].
We describe the reduction now, which is shown in Figure 10.1. The tree T has m
leaves. Each leaf wants to dominate B + 1 closed subtrees (i.e., subtrees which have
only closed leaves). T is required to be the child of some node l. This node l also
wants to dominate the trees t1 , . . . , t3m . For all i, the tree ti has ai + 1 open leaves.
Theorem 10.1. The configurability problem for dominance graphs with closed
leaves is NP-complete.
Proof. Consider an instance (A, B) of the 3-partition problem and the dominance
graph G constructed in the reduction. We show that the instance (A, B) has a solution
iff G is configurable.
Assume first that the 3-partition problem has a solution. Observe that each of
the sets Ai must have cardinality three. Let Ai = {axi , ayi , azi } be one of the sets
10 Exactly the same reduction works if we do not require open leaves to have outgoing dominance
edges in solved forms; so this modified problem is NP-complete as well.
19
in the partition. Then axi + ayi + azi = B. We plug txi as child into the i-th leaf
of T , tyi into some leaf of txi and tzi into some leaf of tyi . Then the tree T has
axi + 1 + ayi + 1 + azi + 1 − 2 = B + 1 open leaves below its i-th leaf. These leaves are
plugged with the B + 1 closed subtrees which the i-th leaf of T wants to dominate.
Finally, we plug l with T and obtain a configuration of G.
Assume next that the dominance graph G has a configuration. Consider the
subtree pluggedPto the i-th leaf of T . It contains a subset Ai of the trees {t1 , . . . , t3m }.
We must have tj ∈Ai (aj + 1) ≥ B + 1 + |Ai | − 1, which can be seen as follows. B + 1
closed subtrees must be plugged into some open leaf. Every subtree in Ai also requires
an open leaf where its root can be plugged. And one of these leaves is the i-th leaf of
T.
We next show that |Ai | ≥ 3 for all i. It is clear that Ai cannot be empty (since
B > 0). If Ai is a singleton, i.e. Ai = {tx }, we have a contradiction since tx has
ax + 1 < B/2 + 1 ≤ B + 1 leaves. Now consider the case, where Ai consists of
two elements tx and ty . By attaching tx and ty below the i-th leaf of T , we obtain
ax + 1 + ay + 1 − 1 < B/2 + 1 + B/2 = B + 1 open leaves, which is also a contradiction.
Since each set Ai has cardinality at least three, since we have m sets, and
P since there
are 3m elements to distribute, we conclude that |Ai | = 3 for all i. Thus tj ∈Ai aj ≥ B
P
for every i. Finally, we observe that we have equality since a∈A a = mB. Thus we
also have a solution for the 3-partition problem.
Note that for solvability of dominance graphs with closed leaves, Theorem 6.2
still holds. That is, solvability is still a polynomial problem. The difference with the
unrestricted problem is that Lemma 4.4 breaks down: All the graphs we construct in
the encoding of 3-partition are in solved form, but they may well be unconfigurable.
The relevance of this result is again in its relation to computational linguistics.
There are alternative approaches to scope [Bos96] which require that the holes and
roots of the trees must be paired uniquely: The roots must be “plugged” into the
holes, and every hole must be plugged. This corresponds to making the holes open
leaves, and all others closed leaves. Hence, we can show that the satisfiability problems
of these alternative approaches must be NP-complete as well.
11. Conclusion. We have have distinguished the large and natural fragment
of normal dominance constraints and shown that it has a polynomial time satisfiability problem. We have shown that this satisfiability problem is equivalent to the
configuration problem of dominance graphs, we introduced. Configurability was then
reduced to the existence of particular cycles, which could finally be checked by solving
a weighted matching problem.
The efficient graph algorithm we presented eliminates any doubts about the
computational practicability of dominance constraints which were raised by the NPcompleteness result for the general language [KNT01] and expressed e.g. in [WM99].
First experiments confirm the efficiency of the new algorithm – it is superior to the
NP algorithms especially on larger constraints.
Two main directions are to be pursued in the future. On the one hand side, one
might want to extend the presented graph algorithm to more expressive languages than
normal dominance constraints. In particular, one might try to find a polynomial time
fragment of parallelism constraints [EKN02] that are also useful for computational
linguistics [EKN01]. On the other hand side, it might be worthwhile in general to
investigate graph algorithms for other problems in the areas constraint programming
or computational linguistics.
20
REFERENCES
[AC92]
[ADK+ 01]
[Bos96]
[BRVS95]
[CFS97]
[Cor94]
[DG01]
[DN00]
[DT99]
[EKN01]
[EKN02]
[ENRX98]
[GJ79]
[GK79]
[GKT01]
[GW98]
[Hob83]
[KMN00]
[KNT01]
[MHF83]
[MN99]
H. Alshawi and R. Crouch. Monotonic semantic interpretation. In Proceedings of
the 30th Annual Meeting of the Association of Computational Linguistics, pages
32–39, 1992.
E. Althaus, D. Duchier, A. Koller, K. Mehlhorn, J. Niehren, and S. Thiel. An efficient
algorithm for the configuration problem of dominance graphs. In Proceedings of
the 12th ACM-SIAM Symposium on Discrete Algorithms, pages 815–824, 2001.
Johan Bos. Predicate logic unplugged. In Proceedings of the 10th Amsterdam Colloquium, pages 133–143, 1996.
R. Backofen, J. Rogers, and K. Vijay-Shanker. A first-order axiomatization of the
theory of finite trees. Journal of Logic, Language, and Information, 4:5–39, 1995.
A. Copestake, D. Flickinger, and I. Sag. Minimal Recursion Semantics. An Introduction. Manuscript, ftp://csli-ftp.stanford.edu/linguistics/sag.ps, 1997.
Thomas Cornell. On determining the consistency of partial descriptions of trees. In
Proceedings of the 32th Annual Meeting of the Association of Computational Linguistics, pages 163–170, 1994.
Denys Duchier and Claire Gardent. Tree descriptions, constraints and incrementality.
In Harry Bunt, Reinhard Muskens, and Elias Thijsse, editors, Computing Meaning,
Volume 2, volume 77 of Studies In Linguistics And Philosophy, pages 205–227.
Kluwer Academic Publishers, December 2001.
Denys Duchier and Joachim Niehren. Dominance constraints with set operators. In
Proceedings of the First International Conference on Computational Logic, number 1861 in Lecture Notes in Computer Science, pages 326–341. Springer-Verlag,
July 2000.
Denys Duchier and Stefan Thater. Parsing with tree descriptions: a constraint-based
approach. In Sixth International Workshop on Natural Language Understanding
and Logic Programming, pages 17–32, December 1999.
Markus Egg, Alexander Koller, and Joachim Niehren. The constraint language for
lambda structures. Journal of Logic, Language, and Information, 10:457–485,
2001.
Katrin Erk, Alexander Koller, and Joachim Niehren. Processing underspecified semantic representations in the constraint language for lambda structures. Research on
Language and Computation, 1(1), 2002. In Press.
Markus Egg, Joachim Niehren, Peter Ruhrberg, and Feiyu Xu. Constraints over
lambda-structures in semantic underspecification. In Proceedings of the Joint 17th
International Conference on Computational Linguistics and 36th Annual Meeting
of the Association of Computational Linguistics, pages 353–359, 1998.
M.R. Garey and D.S Johnson. Computers and Intractability: A Guide to the Theory
of NP-completeness. W.H. Freeman and Company, 1979.
A. Goralcikova and V. Koubek. A reduct-and-closure algorithm for graphs. In Proceedings of the 8th Symposium on Mathematical Foundations of Computer Science,
volume 74 of LNCS, pages 301–307. Springer, 1979.
H.N. Gabow, H. Kaplan, and R.E. Tarjan. Unique maximum matching algorithms.
Journal of Algorithms, 40:159–183, 2001.
Claire Gardent and Bonnie Webber. Describing discourse semantics. In Proceedings of
the 4th TAG+ Workshop, Philadelphia, 1998.
Jerry Hobbs. An improper treatment of quantification in ordinary english. In Proceedings of the 21st annual meeting of the Association of Computational Linguistics,
pages 57–63, 1983.
Alexander Koller, Kurt Mehlhorn, and Joachim Niehren. A polynomial-time fragment
of dominance constraints. In Proceedings of the 38th Annual Meeting of the Association of Computational Linguistics, pages 368–375, October 2000.
Alexander Koller, Joachim Niehren, and Ralf Treinen. Dominance constraints: Algorithms and complexity. In Proceedings of the Third International Conference on
Logical Aspects of Computational Linguistics (Dec. 1998), volume 2014 of Lecture
Note in Artificial Intelligence, pages 106–125. Springer-Verlag, 2001.
Mitchell P. Marcus, Donald Hindle, and Margaret M. Fleck. D-theory: Talking about
talking about trees. In Proceedings of the 21st annual meeting of the Association
of Computational Linguistics, pages 129–136, 1983.
Kurt Mehlhorn and Stefan Näher. LEDA: A platform for combinatorial and geometric
computing. Cambridge University Press, Cambridge, November 1999.
21
[MNP00]
[Mus95]
[Per00]
[Rey93]
[RVSW95]
[Sim88]
[Smo92]
[ST94]
[TW67]
[VS92]
[VSWR95]
[WM99]
Martin Müller, Joachim Niehren, and Andreas Podelski. Ordering constraints over
feature trees. Constraints, an International Journal, 5(1–2):7–42, January 2000.
Special Issue on CP’97.
R.A. Muskens. Order-independence and underspecification. In J. Groenendijk, editor,
Ellipsis, Underspecification, Events and More in Dynamic Semantics. DYANA
Deliverable R.2.2.C, 1995.
Guy Perrier. From intuitionistic proof nets to interaction grammars. In Proceedings of
the 5th TAG+ Workshop, Paris, 2000.
Uwe Reyle. Dealing with ambiguities by underspecification: construction, representation, and deduction. Journal of Semantics, 10:123–179, 1993.
O. Rambow, K. Vijay-Shanker, and D. Weir. D-Tree grammars. In Proceedings of
the 33rd annual meeting of the Association of Computational Linguistics, pages
151–158, 1995.
Klaus Simon. An improved algorithm for transitive closure on acyclic digraphs. Theoretical Computer Science, 58(1–3):325–346, 1988.
Gert Smolka. Feature constraint logics for unification grammars. Journal of Logic
Programming, 12:51–87, 1992.
Gert Smolka and Ralf Treinen. Records for logic programming. Journal of Logic
Programming, 18(3):229–258, April 1994.
J. W. Thatcher and J. B. Wright. Generalized finite automata theory with an application to a decision problem of second-order logic. Mathematical Systems Theory,
2(1):57–81, August 1967.
K. Vijay-Shanker. Using descriptions of trees in a tree adjoining grammar. Computational Linguistics, 18:481–518, 1992.
K. Vijay-Shanker, David Weir, and Owen Rambow. Parsing D-Tree Grammars. In
Proceedings of the International Workshop on Parsing Technologies, 1995.
A. Willis and S. Manandhar. Two accounts of scope availability and semantic underspecification. In Proceedings of the 37th annual meeting of the Association of
Computational Linguistics, pages 293–300, 1999.
22