Document 10949553
advertisement

Hindawi Publishing Corporation
Mathematical Problems in Engineering
Volume 2011, Article ID 463087, 22 pages
doi:10.1155/2011/463087
Research Article
Global Convergence of a Nonlinear Conjugate
Gradient Method
Liu Jin-kui, Zou Li-min, and Song Xiao-qian
School of Mathematics and Statistics, Chongqing Three Gorges University, Chongqing 404000, China
Correspondence should be addressed to Liu Jin-kui, liujinkui2006@126.com
Received 5 March 2011; Revised 21 May 2011; Accepted 4 June 2011
Academic Editor: Piermarco Cannarsa
Copyright q 2011 Liu Jin-kui et al. This is an open access article distributed under the Creative
Commons Attribution License, which permits unrestricted use, distribution, and reproduction in
any medium, provided the original work is properly cited.
A modified PRP nonlinear conjugate gradient method to solve unconstrained optimization
problems is proposed. The important property of the proposed method is that the sufficient descent
property is guaranteed independent of any line search. By the use of the Wolfe line search, the
global convergence of the proposed method is established for nonconvex minimization. Numerical
results show that the proposed method is effective and promising by comparing with the VPRP,
CG-DESCENT, and DL methods.
1. Introduction
The nonlinear conjugate gradient method is one of the most efficient methods in solving
unconstrained optimization problems. It comprises a class of unconstrained optimization
algorithms which is characterized by low memory requirements and simplicity.
Consider the unconstrained optimization problem
minn fx,
x∈R
1.1
where f : Rn → R is continuously differentiable, and its gradient g is available.
The iterates of the conjugate gradient method for solving 1.1 are given by
xk1 xk αk dk ,
1.2
2
Mathematical Problems in Engineering
where stepsize αk is positive and computed by certain line search, and the search direction dk
is defined by
dk ⎧
⎨−gk ,
for k 1,
⎩−g β d ,
k
k k−1
for k ≥ 2,
1.3
where gk ∇fxk , and βk is a scalar. Some well-known conjugate gradient methods include
Polak-Ribière-Polyak PRP method 1, 2 , Hestenes-Stiefel HS method 3 , Hager-Zhang
HZ method 4 , and Dai-Liao DL method 5 . The parameters βk of these methods are
specified as follows:
βkPRP
βkHS
gkT gk − gk−1
,
gk−1 2
gkT gk − gk−1
T ,
dk−1 gk − gk−1
βkHZ βkDL yk−1 − 2dk−1
gkT yk−1
T
dk−1
yk−1
−t
yk−1 2
T
T
dk−1
yk−1
gkT sk−1
T
dk−1
yk−1
1.4
gk
T
dk−1
yk−1
,
,
t ≥ 0,
where || · || is the Euclidean norm and yk−1 gk − gk−1 . We know that if f is a strictly convex
quadratic function, the above methods are equivalent in the case that an exact line search is
used. If f is nonconvex, their behaviors may be further different.
In the past few years, the PRP method has been regarded as the most efficient conjugate gradient method in practical computation. One remarkable property of the PRP method
is that it essentially performs a restart if a bad direction occurs see 6 . Powell 7 constructed an example which showed that the PRP method can cycle infinitely without approaching any stationary point even if an exact line search is used. This counterexample also
indicates that the PRP method has a drawback that it may not globally be convergent when
the objective function is nonconvex. Powell 8 suggested that the parameter βk is negative
in the PRP method and defined βk as
βk max 0, βkPRP .
1.5
Gilbert and Nocedal 9 considered Powell’s suggestion and proved the global convergence
of the modified PRP method for nonconvex functions under the appropriate line search. In
addition, there are many researches on convergence properties of the PRP method see 10–
12 .
In recent years, much effort has been investigated to create new methods, which not
only possess global convergence properties for general functions but also are superior to
original methods from the computation point of view. For example, Yu et al. 13 proposed a
Mathematical Problems in Engineering
3
new nonlinear conjugate gradient method in which the parameter βk is defined on the basic
of βkPRP such as
βkVPRP
⎧ 2
T
⎪
⎪
⎨ gk − gk gk−1
ν g T dk−1 gk−1 2
k
⎪
⎪
⎩0,
2
if gk > gkT gk−1 ,
1.6
otherwise,
where ν > 1 in this paper, we call this method as VPRP method. And they proved the
global convergence of the VPRP method with the Wolfe line search. Hager and Zhang 4
discussed the global convergence of the HZ method for strong convex functions under the
Wolfe line search and Goldstein line search. In order to prove the global convergence for
general functions, Hager and Zhang modified the parameter βkHZ as
βkMHZ max βkHZ , ηk ,
1.7
−1
,
dk min η, gk 1.8
where
ηk η > 0.
The corresponding method of 1.7 is the famous CG-DESCENT method.
Dai and Liao 5 proposed a new conjugate condition, that is,
dkT yk−1 −tgkT sk−1 ,
t ≥ 0.
1.9
Under the new conjugate condition, they proved global convergence of the DL conjugate
gradient method for uniformly convex functions. According to Powell’s suggestion, Dai and
Liao gave a modified parameter
βk max
gkT yk−1
T
dk−1
yk−1
,0 − t
gkT sk−1
T
dk−1
yk−1
,
t ≥ 0.
1.10
The corresponding method of 1.10 is the famous DL method. Under the strong Wolfe
line search, they researched the global convergence of the DL method for general functions.
Zhang et al. 14 proposed a modified DL conjugate gradient method and proved its global
convergence. Moreover, some researchers have been studying a new type of method called
the spectral conjugate gradient method see 15–17 .
This paper is organized as follows: in the next section, we propose a modified PRP
method and prove its sufficient descent property. In Section 3, the global convergence of the
method with the Wolfe line search is given. In Section 4, numerical results are reported. We
have a conclusion in the last section.
4
Mathematical Problems in Engineering
2. Modified PRP Method
In this section, we propose a modified PRP conjugate gradient method in which the parameter βk is defined on the basic of βkPRP as follows:
βkMPRP
⎧
⎪
⎪
⎨
2
gk − g T gk−1
k
max 0, g T dk−1 gk−1 2
k
⎪
⎪
⎩0,
2
2
if gk ≥ gkT gk−1 ≥ mgk ,
2.1
otherwise,
in which m ∈ 0, 1. We introduce the modified PRP method as follows.
2.1. Modified PRP (MPRP) Method
Step 1. Set x1 ∈ Rn , ε ≥ 0, and d1 −g1 , if g1 ≤ ε, then stop.
Step 2. Compute αk by some inexact line search.
Step 3. Let xk1 xk αk dk , gk1 gxk1 , if ||gk1 || ≤ ε, then stop.
Step 4. Compute βk1 by 2.1, and generate dk1 by 1.3.
Step 5. Set k k 1, and go to Step 2.
In the convergence analyses and implementations of conjugate gradient methods, one
often requires the inexact line search to satisfy the Wolfe line search or the strong Wolfe line
search. The Wolfe line search is to find αk such that
fxk αk dk ≤ fxk δαk gkT dk ,
2.2
gxk αk dk T dk ≥ σgkT dk ,
2.3
where 0 < δ < σ < 1. The strong Wolfe line search consists of 2.2 and the following
strengthened version of 2.3:
gxk αk dk T dk ≤ −σgkT dk .
2.4
Moreover, in most references, we can see that the sufficient descent condition
2
gkT dk ≤ −cgk ,
c>0
2.5
is always given which plays a vital role in guaranteeing the global convergence properties of
conjugate gradient methods. But, in this paper, dk can satisfy 2.5 without any line search.
Theorem 2.1. Consider any method 1.2-1.3, where βk βkMPRP . If gk /
0 for all k ≥ 1, then
2
gkT dk < −gk ,
∀k ≥ 1.
2.6
Mathematical Problems in Engineering
5
Proof. Multiplying 1.3 by gkT , we get
2
gkT dk −gk βkMPRP gkT dk−1 .
2.7
If βkMPRP 0, from 2.7, we know that the conclusion 2.6 holds. If βkMPRP /
0, the proof is
divided into two cases in the following.
Firstly, if gkT dk−1 ≤ 0, then from 2.1 and 2.7, one has
gkT dk
2
gk − g T gk−1
k
T
2 · gk dk−1
T
max 0, gk dk−1 gk−1
2
2 gk − gkT gk−1
− gk · gkT dk−1
gk−1 2
2 2
gkT gk−1 /gk · gkT dk−1 − gkT dk−1 gk−1 2
−gk ·
gk−1 2
2 2
gk−1 − gkT dk−1 1 − gkT gk−1 /gk 2
−gk ·
gk−1 2
gk−1 2
2
2
≤ −gk · 2 −gk < 0.
gk−1 2
−gk 2.8
Secondly, if gkT dk−1 > 0, then from 2.7, we also have
gkT dk
2
2
2 gk − gkT gk−1
< − gk · gkT dk−1 − gkT gk−1 ≤ −mgk .
T
gk dk−1
2.9
From the above, the conclusion 2.6 holds under any line search.
3. Global Convergences of the Modified PRP Method
In order to prove the global convergence of the modified PRP method, we assume that the
objective function fx satisfies the following assumption.
Assumption H
i The level set Ω {x ∈ Rn | fx ≤ fx1 } is bounded, that is, there exists a positive
constant ξ > 0 such that for all x ∈ Ω, ||x|| ≤ ξ.
ii In a neighborhood V of Ω, f is continuously differentiable and its gradient g is
Lipchitz continuous, namely, there exists a constant L > 0 such that
gx − g y ≤ Lx − y,
∀x, y ∈ V.
3.1
6
Mathematical Problems in Engineering
Under these assumptions on f, there exists a constant γ > 0 such that
gx ≤ γ
∀x ∈ Ω.
3.2
The conclusion of the following lemma, often called the Zoutendijk condition, is used
to prove the global convergence properties of nonlinear conjugate gradient methods. It was
originally given by Zoutendijk 18 .
Lemma 3.1. Suppose that, Assumption H holds. Consider any iteration of 1.2-1.3, where dk
satisfies gkT dk < 0 for k ∈ N and αk satisfies the Wolfe line search, then
gkT dk 2
k≥1
< ∞.
dk 2
3.3
Lemma 3.2. Suppose that Assumption H holds. Consider the method 1.2-1.3, where βk βkMPRP ,
and αk satisfies the Wolfe line search and 2.6. If there exists a constant r > 0, such that
gk ≥ r,
∀k ≥ 1,
3.4
then one has
uk − uk−1 2 < ∞,
3.5
k≥2
where uk dk /||dk ||.
Proof. From 2.1 and 3.4, we get
gkT gk−1 /
0.
3.6
By 2.6 and 3.6, we know that dk /
0 for each k.
Define the quantities
rk −gk
,
dk δk βkMPRP dk−1 dk .
3.7
By 1.3, one has
uk −gk βkMPRP dk−1
dk
rk δk uk−1 .
dk dk 3.8
Since uk is unit vector, we get
rk uk − δk uk−1 δk uk − uk−1 .
3.9
Mathematical Problems in Engineering
7
1
0.9
0.8
0.7
0.6
Y 0.5
0.4
0.3
0.2
0.1
0
0
2
4
6
8
10
X
MPRP method
VPRP method
CG-DESCENT method
DL+ method
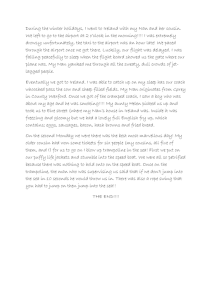
Figure 1: Performance profiles of the conjugate gradient methods with respect to CPU time.
1
0.9
0.8
0.7
0.6
Y 0.5
0.4
0.3
0.2
0.1
0
0
1
2
3
4
5
6
7
8
9
10
X
MPRP method
VPRP method
CG-DESCENT method
DL+ method
Figure 2: Performance profiles with respect to the number of iterations.
From δk ≥ 0 and the above equation, one has
uk − uk−1 ≤ 1 δk uk − uk−1 1 δk uk − 1 δk uk−1 8
Mathematical Problems in Engineering
≤ uk − δk uk−1 δk uk − uk−1 2rk .
3.10
By 2.1, 3.4, and 3.6, one has
g T gk−1
1 ≥ k 2
gk 2
3.11
> m.
From 3.3, 2.6, 3.4, and 3.11, one has
⎞
2
T
g
g
k−1
k
⎝rk · ⎠
m2
rk ≤
gk 2
0
0
k≥1,dk /
k≥1,dk /
2
⎛
2
gkT gk−1
0
k≥1,dk /
dk 2
≤
0
k≥1,dk /
gkT dk
2
3.12
2
dk 2
< ∞,
so
rk 2 < ∞.
3.13
k≥1,dk /0
By 3.10 and the above inequality, one has
uk − uk−1 2 < ∞.
3.14
k≥2
Lemma 3.3. Suppose that Assumption H holds. If 3.4 holds, then βkMPRP has property (∗ ), that is,
1 there exists a constant b > 1, such that |βkMPRP | ≤ b,
2 there exists a constant λ > 0, such that ||xk − xk−1 || ≤ λ ⇒ |βkMPRP | ≤ 1/2b.
Proof. From Assumption ii, we know that 3.2 holds. By 2.1, 3.2, and 3.4, one has
βkMPRP
gk gk−1 · gk 2γ 2
≤
≤ 2 b.
r
gk−1 2
3.15
Mathematical Problems in Engineering
9
1
0.9
0.8
0.7
0.6
Y 0.5
0.4
0.3
0.2
0.1
0
0
1
2
3
4
5
6
7
8
9
10
X
MPRP method
VPRP method
CG-DESCENT method
DL+ method
Figure 3: Performance profiles with respect to the number of function evaluations.
Define λ r 2 /2Lγb. If ||xk − xk−1 || ≤ λ, then from 2.1, 3.1, 3.2, and 3.4, one has
βkMPRP
2
gk − g T gk−1 g T gk − gk−1
k
k
≤
gk−1 2
gk−1 2
gk · gk − gk−1 γLλ
1
.
≤
≤ 2 2b
r
gk−1 2
3.16
Lemma 3.4 see 19 . Suppose that Assumption H holds. Let {xk } and {dk } be generated by 1.21.3, in which αk satisfies the Wolfe line search and 2.6. If βk ≥ 0 has the property (∗ ) and 3.4
holds, then there exits λ > 0, for any Δ ∈ Z and k0 ∈ Z , for all k ≥ k0 , such that
Rλk,Δ >
Δ
,
2
3.17
where Rλk,Δ {i ∈ Z : k ≤ i ≤ k Δ − 1, ||xi − xi−1 || ≥ λ}, |Rλk,Δ | denotes the number of the Rλk,Δ .
Theorem 3.5. Suppose that Assumption H holds. Let {xk } and {dk } be generated by 1.2-1.3, in
which αk satisfies the Wolfe line search and 2.6, βk βkMPRP , then one has
lim infgk 0.
k → ∞
3.18
10
Mathematical Problems in Engineering
Table 1: The numerical results of the modified PRP method.
Problem
ROSE
FROTH
BADSCP
BADSCB
BEALE
HELIX
BRAD
GAUSS
MEYER
GULF
BOX
SING
WOOD
KOWOSB
BD
OSB1
BIGGS
OSB2
JENSAM
VARDIM
WATSON
PEN2
Dim
2
2
2
2
2
3
3
3
3
3
3
4
4
4
4
5
6
11
6
7
8
9
10
11
3
5
6
8
9
10
12
15
5
6
7
8
10
12
15
20
5
10
15
20
30
40
50
60
NI
24
11
26
11
21
25
20
3
1
1
1
67
33
57
26
1
121
341
12
13
11
12
26
NaN
4
6
5
7
7
7
7
8
59
387
1768
3934
4319
1892
1527
3001
111
185
154
178
123
147
152
163
NF
109
80
227
89
75
76
73
8
1
2
1
263
150
222
127
1
449
900
49
56
53
65
133
NaN
40
57
65
72
78
81
90
92
200
1281
5834
13373
15102
6762
5552
11308
439
845
774
989
610
700
744
813
NG
90
61
210
79
59
61
61
6
1
2
1
228
117
195
96
1
396
811
32
35
30
38
94
NaN
26
38
43
47
50
52
58
60
167
1134
5191
11920
13451
6007
4933
10107
393
752
679
889
534
617
651
720
CPU
0.3651
0.0594
0.2000
0.1085
0.1449
0.1754
0.1380
0.0164
0.0063
0.0173
0.0574
0.5000
0.2421
0.4000
0.1995
0.0157
1.0000
1.3000
0.0900
0.1872
0.1678
0.1160
0.2604
NaN
0.0135
0.0296
0.0270
0.0327
0.0647
0.0646
0.0647
0.0948
0.2000
1.4000
6.0000
14.0000
17.0000
9.0000
7.0000
19.0000
0.4000
1.5000
0.5000
0.6000
0.4000
0.5000
1.2000
0.7000
Mathematical Problems in Engineering
11
Table 1: Continued.
Problem
PEN1
TRIG
ROSEX
SINGX
BV
IE
Dim
5
10
20
30
50
100
200
300
10
20
50
100
200
300
400
500
100
200
300
400
500
1000
1500
2000
100
200
300
400
500
1000
1500
2000
200
300
400
500
600
1000
1500
2000
200
300
400
500
600
1000
1500
2000
NI
30
88
32
73
72
29
28
27
41
56
49
61
56
52
57
53
26
26
26
26
26
26
26
26
78
79
73
89
91
93
82
80
1813
636
226
188
86
21
11
2
6
6
6
6
6
6
6
6
NF
151
415
155
350
346
189
198
201
92
136
106
137
116
106
116
109
123
123
123
123
123
123
123
123
320
335
308
367
374
385
347
341
4326
1501
516
420
190
40
20
6
13
13
13
13
13
13
13
13
NG
125
357
124
290
285
147
152
150
82
127
103
127
114
101
114
108
103
103
103
103
103
103
103
103
283
293
269
324
330
342
306
299
4063
1418
487
398
184
37
19
5
7
7
7
7
7
7
7
7
CPU
0.2742
0.9000
0.3349
0.7000
0.3000
0.2458
0.4759
1.0464
0.3817
0.5634
0.1949
0.3857
2.0205
11.6394
44.9734
89.8125
0.2323
0.2583
0.3078
0.4697
0.6781
2.4474
5.3979
9.9364
0.8000
0.8000
0.8000
1.6000
2.2000
8.0000
15.8000
28.4000
9.0000
5.4000
2.7000
3.2000
1.9000
0.9963
1.0900
0.5456
0.3063
0.6698
1.1916
1.8511
2.6615
7.3635
16.6397
29.4927
12
Mathematical Problems in Engineering
Table 2: The numerical results of the VPRP method.
Problem
TRID
ROSE
FROTH
BADSCP
BADSCB
BEALE
HELIX
BRAD
GAUSS
MEYER
GULF
BOX
SING
WOOD
KOWOSB
BD
OSB1
BIGGS
OSB2
JENSAM
VARDIM
WATSON
Dim
200
300
400
500
600
1000
1500
2000
2
2
2
2
2
3
3
3
3
3
3
4
4
4
4
5
6
11
6
7
8
9
10
11
3
5
6
8
9
10
12
15
5
6
7
8
10
12
15
20
NI
35
36
37
35
36
35
36
37
24
12
99
13
12
74
30
3
1
1
1
101
174
71
42
1
113
264
9
11
10
17
17
6
4
6
5
7
7
7
7
8
193
342
1451
6720
NaN
3507
5271
NaN
NF
81
83
83
78
80
79
84
85
111
78
394
30
48
203
100
7
1
2
1
341
482
234
161
1
375
667
33
39
42
90
124
76
40
57
65
72
78
81
90
92
535
1002
4157
19530
NaN
10432
15817
NaN
NG
74
75
75
73
76
75
79
79
85
59
336
19
35
175
80
4
1
2
1
289
417
203
125
1
330
603
17
17
19
57
84
46
26
38
43
47
50
52
58
60
473
890
3678
17300
NaN
9234
14006
NaN
CPU
0.3327
0.3587
0.3731
0.4935
0.6862
1.7180
4.0501
7.5866
0.1585
0.0698
0.4000
0.0448
0.0402
0.5000
0.2027
0.0085
0.0058
0.0052
0.0561
0.7000
0.6000
0.3000
0.2451
0.0063
0.8000
1.5000
0.0696
0.1137
0.0883
0.1850
0.1435
0.1111
0.0290
0.0203
0.0273
0.036
0.0715
0.0458
0.0672
0.0622
1.4000
2.2000
5.0000
20.0000
NaN
13.0000
24.0000
NaN
Mathematical Problems in Engineering
13
Table 2: Continued.
Problem
PEN2
PEN1
TRIG
ROSEX
SINGX
BV
Dim
5
10
15
20
30
40
50
60
5
10
20
30
50
100
200
300
10
20
50
100
200
300
400
500
100
200
300
400
500
1000
1500
2000
100
200
300
400
500
1000
1500
2000
200
300
400
500
600
1000
1500
2000
NI
129
90
434
941
771
248
952
927
32
90
28
76
64
23
21
28
36
56
45
58
64
52
60
59
24
24
24
24
24
24
24
24
169
199
365
627
129
229
100
128
NaN
7278
3837
1842
898
133
19
2
NF
499
379
1467
2959
2531
978
2788
2822
151
383
160
334
344
160
174
192
82
125
93
120
135
102
132
127
111
111
111
111
111
111
111
111
562
676
1181
2025
431
788
329
428
NaN
12990
6707
3236
1562
232
36
6
NG
434
328
1298
2612
2193
860
2511
2435
124
324
121
279
280
122
128
143
71
114
85
113
128
99
125
116
85
85
85
85
85
85
85
85
483
576
1031
1756
367
675
280
363
NaN
12989
6706
3235
1561
231
35
5
CPU
1.0000
0.3000
2.2000
3.0000
3.0000
1.6000
3.0000
4.0000
0.3752
0.8000
0.1119
0.3000
0.5000
0.2212
0.4081
1.0207
0.4048
0.6413
0.3426
0.4573
2.0248
12.4258
52.5691
101.6207
0.2798
0.2808
0.3136
0.4271
0.6181
2.1821
4.7644
8.8878
0.6000
1.4000
3.7000
9.0000
2.5000
16.9000
16.0000
36.0000
NaN
55.0000
42.0000
26.0000
17.6000
6.2000
2.0484
0.5156
14
Mathematical Problems in Engineering
Table 2: Continued.
Problem
IE
TRID
Dim
200
300
400
500
600
1000
1500
2000
200
300
400
500
600
1000
1500
2000
NI
7
7
7
7
7
7
7
7
33
35
35
35
37
34
37
37
NF
15
15
15
15
15
15
15
15
75
79
78
78
82
76
86
86
NG
8
8
8
8
8
8
8
8
71
75
74
74
78
72
81
80
CPU
0.3596
0.7986
1.4202
2.2147
3.1811
8.8316
19.7838
34.7553
0.3758
0.3654
0.3912
0.5188
0.7388
1.6832
4.1950
7.5255
1
0.9
0.8
0.7
0.6
Y 0.5
0.4
0.3
0.2
0.1
0
0
1
2
3
4
5
6
7
8
9
10
X
MPRP method
VPRP method
CG-DESCENT method
DL+ method
Figure 4: Performance profiles with respect to the number of gradient evaluations.
Proof. To obtain this result, we proceed by contradiction. Suppose that 3.18 does not hold,
which means that there exists r > 0 such that
gk ≥ r,
so, we know that Lemmas 3.2 and 3.4 hold.
for k ≥ 1,
3.19
Mathematical Problems in Engineering
15
Table 3: The numerical results of the CG-DESCENT method.
Problem
ROSE
FROTH
BADSCP
BADSCB
BEALE
HELIX
BRAD
GAUSS
MEYER
GULF
BOX
SING
WOOD
KOWOSB
BD
OSB1
BIGGS
OSB2
JENSAM
VARDIM
WATSON
PEN2
Dim
2
2
2
2
2
3
3
3
3
3
3
4
4
4
4
5
6
11
6
7
8
9
10
11
3
5
6
8
9
10
12
15
5
6
7
8
10
12
15
20
5
10
15
20
30
40
50
60
NI
36
12
40
16
11
66
47
3
1
1
1
62
103
77
53
1
128
379
NaN
12
11
NaN
5
21
4
6
5
7
7
7
7
8
135
421
1822
2607
NaN
3370
5749
5902
128
147
663
734
810
1488
744
755
NF
132
64
213
101
45
179
143
10
1
2
1
198
298
222
204
1
395
915
NaN
51
50
NaN
59
148
40
57
65
72
78
81
90
92
391
1186
5278
7589
NaN
10111
17442
18524
485
571
2262
2452
2438
4502
2342
2457
NG
107
48
189
88
33
152
122
8
1
2
1
164
247
192
162
1
341
827
NaN
32
26
NaN
34
105
26
38
43
47
50
52
58
60
336
1043
4655
6716
NaN
8930
15368
16282
421
486
1996
2181
2264
3960
2056
2188
CPU
0.2371
0.0462
0.2000
0.1212
0.0405
0.4397
0.2292
0.0093
0.0085
0.0068
0.0600
0.3000
0.5000
0.4000
0.3000
0.0084
0.7000
1.2000
NaN
0.1114
0.0844
NaN
0.0421
0.1749
0.0246
0.0174
0.0266
0.0226
0.0323
0.0495
0.0610
0.0583
0.5000
1.4000
6.0000
9.0000
NaN
12.0000
27.0000
36.0000
1.1000
0.4000
2.0000
3.0000
3.0000
5.0000
2.0000
3.0000
16
Mathematical Problems in Engineering
Table 3: Continued.
Problem
PEN1
TRIG
ROSEX
SINGX
BV
IE
Dim
5
10
20
30
50
100
200
300
10
20
50
100
200
300
400
500
100
200
300
400
500
1000
1500
2000
100
200
300
400
500
1000
1500
2000
200
300
400
500
600
1000
1500
2000
200
300
400
500
600
1000
1500
2000
NI
39
94
35
76
81
31
25
26
33
60
43
53
59
51
58
51
36
34
35
31
31
37
34
32
77
54
99
79
69
101
66
69
NaN
NaN
4509
1635
925
247
18
2
7
7
7
7
7
7
7
7
NF
174
404
162
347
375
184
171
186
74
145
95
116
123
109
121
110
124
125
133
121
129
142
132
128
227
172
301
245
215
322
210
210
NaN
NaN
8044
2926
1605
418
38
6
15
15
15
15
15
15
15
15
NG
141
345
127
286
313
141
126
139
65
132
90
108
118
105
114
105
99
102
107
100
106
116
106
103
187
141
248
207
180
271
174
173
NaN
NaN
8043
2925
1604
417
37
5
8
8
8
8
8
8
8
8
CPU
0.3298
0.8000
0.1220
0.3000
0.4000
0.2434
0.4106
1.0160
0.2781
0.5098
0.3620
0.4474
1.7555
12.6411
45.0506
89.7073
0.1230
0.1539
0.3939
0.5789
0.8736
3.5602
7.4845
12.9238
0.7000
0.2376
1.0000
1.3000
1.6000
8.6000
12.4000
23.1000
NaN
NaN
63.0000
34.0000
24.5000
16.9000
3.0564
0.6883
0.3546
0.7927
1.4039
2.2022
3.1297
8.6892
19.5607
34.7423
Mathematical Problems in Engineering
17
Table 3: Continued.
Problem
TRID
Dim
200
300
400
500
600
1000
1500
2000
NI
31
33
32
34
35
36
36
35
NF
70
73
72
76
78
81
84
80
NG
58
65
61
71
74
77
79
73
CPU
0.2691
0.2857
0.4264
0.6853
0.9484
2.6056
5.8397
9.9491
We also define uk dk /||dk ||, then for all l, k ∈ Z l ≥ k, one has
xl − xk−1 l
xi − xi−1 · ui−1
ik
l
l
si−1 · uk−1 si−1 ui−1 − uk−1 ,
ik
3.20
ik
where si−1 xi − xi−1 , that is,
l
si−1 · uk−1 xl − xk−1 −
ik
l
si−1 ui−1 − uk−1 .
3.21
ik
From Assumption H, we know that there exists a constant ξ > 0 such that
x ≤ ξ,
for x ∈ V.
3.22
From 3.21 and the above inequality, one has
l
l
si−1 ≤ 2ξ si−1 · ui−1 − uk−1 .
ik
3.23
ik
Let Δ be a positive integer and Δ ∈ 8ξ/λ, 8ξ/λ 1 where λ has been defined in Lemma 3.4.
From Lemma 3.2, we know that there exists k0 such that
i≥k0
ui1 − ui 2 ≤
1
.
4Δ
3.24
18
Mathematical Problems in Engineering
Table 4: The numerical results of the DL method.
P
ROSE
FROTH
BADSCP
BADSCB
BEALE
HELIX
BARD
GAUSS
MEYER
GULF
BOX
SING
WOOD
KOWOSB
BD
OSB1
BIGGS
OSB2
JENSAM
VARDIM
WASTON
PEN2
Dim
2
2
2
2
2
3
3
3
3
3
3
4
4
4
4
5
6
11
6
7
8
9
10
11
3
5
6
8
9
10
12
15
5
6
7
8
10
12
15
20
5
10
15
20
30
40
50
60
It
25
9
19
11
11
50
20
2
1
1
1
91
148
76
67
1
59
279
9
9
NaN
15
17
5
4
6
5
7
7
7
7
8
62
346
1247
2034
5973
3200
1865
6420
83
128
277
290
767
675
617
NaN
f iter
110
65
146
56
50
144
76
5
1
2
1
295
402
236
208
1
211
699
35
35
NaN
91
136
80
40
57
65
72
78
81
90
92
208
1055
3443
6104
17601
9291
5402
18320
329
519
1040
1113
2231
1929
2223
NaN
Grade iter
87
50
133
47
39
122
64
3
1
2
1
250
349
204
177
1
189
614
19
17
NaN
57
96
50
26
38
43
47
50
52
58
60
173
927
3085
5408
15699
8259
4790
16360
283
449
922
981
2040
1706
1962
NaN
CPU
0.1192
0.0283
0.1003
0.0434
0.0355
0.2616
0.0824
0.0079
0.0087
0.0062
0.0601
0.5000
0.8000
0.4000
0.3000
0.0083
0.3000
1.4000
0.0570
0.1276
NaN
0.1148
0.2084
0.0882
0.0153
0.0192
0.0184
0.0219
0.0438
0.0242
0.0442
0.0535
0.2000
1.8000
4.0000
7.0000
21.0000
12.0000
8.0000
30.0000
0.7000
1.0000
0.9000
0.9000
3.0000
3.0000
2.0000
NaN
Mathematical Problems in Engineering
19
Table 4: Continued.
P
PEN1
TRIG
ROSEX
SINGX
BV
IE
Dim
5
10
20
30
50
100
200
300
10
20
50
100
200
300
400
500
100
200
300
400
500
1000
1500
2000
100
200
300
400
500
1000
1500
2000
200
300
400
500
600
1000
1500
2000
200
300
400
500
600
1000
1500
2000
It
33
78
24
73
66
22
27
29
34
59
46
55
56
52
56
54
25
25
25
25
25
25
25
25
113
117
215
113
110
137
152
110
NaN
NaN
5624
3314
1618
258
18
2
6
6
6
6
6
6
6
6
f iter
165
353
119
367
356
154
178
195
82
140
94
120
116
110
115
121
110
110
110
110
110
110
110
110
384
397
735
384
367
452
494
367
NaN
NaN
8458
4854
2291
312
30
6
13
13
13
13
13
13
13
13
Grade iter
139
298
94
305
293
117
136
147
71
129
88
111
111
105
113
116
87
87
87
87
87
87
87
87
329
341
634
329
313
388
420
313
NaN
NaN
8457
4853
2290
311
29
5
7
7
7
7
7
7
7
7
CPU
0.2615
0.7000
0.0842
0.3000
0.6000
0.1957
0.4346
1.0408
0.2910
0.5161
0.3865
0.4625
1.6476
12.3062
44.8831
97.7043
0.0859
0.2019
0.2697
0.4169
0.5990
2.2166
4.8426
9.1263
1.0000
0.5000
2.1000
1.6000
2.2000
9.2000
22.1000
30.2000
NaN
NaN
49.0000
38.0000
25.0000
8.7000
1.7251
0.5129
0.3075
0.6731
1.1939
1.8608
2.6785
7.3685
16.5794
29.5854
20
Mathematical Problems in Engineering
Table 4: Continued.
P
TRID
Dim
200
300
400
500
600
1000
1500
2000
It
33
35
36
35
37
34
37
37
f iter
75
79
80
78
82
76
86
86
Grade iter
71
75
76
73
78
72
81
80
CPU
0.2606
0.2866
0.3653
0.4857
0.6950
1.6550
4.1380
7.4702
From the Cauchy-Schwartz inequality and 3.24, for all i ∈ k, k Δ − 1 , one has
ui−1 − uk−1 ≤
i−1 uj − uj−1 jk
⎛
⎞1/2
i−1 2
≤ i − k1/2 ⎝ uj − uj−1 ⎠
3.25
jk
≤ Δ1/2 ·
1
4Δ
1/2
1
.
2
By Lemma 3.4, we know that there exists k ≥ k0 such that
Rλk,Δ >
Δ
.
2
3.26
It follows from 3.23, 3.25, and 3.26 that
λΔ λ λ
1 kΔ−1
< Rk,Δ <
si−1 ≤ 2ξ.
4
2
2 ik
3.27
From 3.27, one has Δ < 8ξ/λ, which is a contradiction with the definition of Δ. Hence,
lim infgk 0,
k → ∞
3.28
which completes the proof.
4. Numerical Results
In this section, we compare the modified PRP conjugate gradient method, denoted the MPRP
method, to VPRP method, CG-DESCENT method, and DL method under the strong Wolfe
line search about problems 20 with the given initial points and dimensions. The parameters
Mathematical Problems in Engineering
21
are chosen as follows: δ 0.01, σ 0.1, v 1.25, η 0.01, and t 0.1. If ||gk || ≤ 10−6
is satisfied, we will stop the program. The program will be also stopped if the number of
iteration is more than ten thousands. All codes were written in Matlab 7.0 and run on a PC
with 2.0 GHz CPU processor and 512 MB memory and Windows XP operation system.
The numerical results of our tests with respect to the MPRP method, VPRP method,
CG-DESCENT method, and DL method are reported in Tables 1, 2, 3, 4, respectively. In the
tables, the column “Problem” represents the problem’s name in 20 , and “CPU,” “NI,” “NF,”
and “NG” denote the CPU time in seconds, the number of iterations, function evaluations,
gradient evaluations, respectively. “Dim” denotes the dimension of the tested problem. If the
limit of iteration was exceeded, the run was stopped, and this is indicated by NaN.
In this paper, we will adopt the performance profiles by Dolan and Moré 21 to
compare the MPRP method to the VPRP method, CG-DESCENT method, and DL method
in the CPU time, the number of iterations, function evaluations, and gradient evaluations
performance, respectively see Figures 1, 2, 3, 4. In figures,
X τ −→
1
size p ∈ P : log2 rp,s ≤ τ ,
np
Y P rp,s ≤ τ : 1 ≤ s ≤ ns .
4.1
Figures 1–4 show the performance of the four methods relative to CPU time, the
number of iterations, the number of function evaluations, and the number of gradient
evaluations, respectively. For example, the performance profiles with respect to CPU time
means that for each method, we plot the fraction P of problems for which the method is
within a factor τ of the best time. The left side of the figure gives the percentage of the test
problems for which a method is the fastest; the right side gives the percentage of the test
problems that are successfully solved by each of the methods. The top curve is the method
that solved of the most problems in a time that was within a factor τ of the best time.
Obviously, Figure 1 shows that MPRP method outperforms VPRP method, CGDESCENT method, and DL method for the given test problems in the CPU time. Figures
2–4 show that the MPRP method also has the best performance with respect to the number
of iterations and function and gradient evaluations since it corresponds to the top curve. So,
the MPRP method is computationally efficient.
5. Conclusions
We have proposed a modified PRP method on the basic of the PRP method, which can
generate sufficient descent directions with inexact line search. Moreover, we proved that
the proposed modified method converge globally for general nonconvex functions. The
performance profiles showed that the proposed method is also very efficient.
Acknowledgments
The authors wish to express their heartfelt thanks to the referees and Professor Piermarco
Cannarsa for their detailed and helpful suggestions for revising the paper. This work
was supported by The Nature Science Foundation of Chongqing Education Committee
KJ091104 and Chongqing Three Gorge University 09ZZ-060.
22
Mathematical Problems in Engineering
References
1 E. Polak and G. Ribire, “Note sur la xonvergence de directions conjugees,” Rev Francaise Informat
Recherche Operatinelle 3e Annee, vol. 16, pp. 35–43, 1969.
2 B. T. Polak, “The conjugate gradient method in extreme problems,” USSR Computational Mathematics
and Mathematical Physics, vol. 9, pp. 94–112, 1969.
3 M. Al-Baali, “Descent property and global convergence of the Fletcher-Reeves method with inexact
line search,” IMA Journal of Numerical Analysis, vol. 5, no. 1, pp. 121–124, 1985.
4 W. W. Hager and H. Zhang, “A new conjugate gradient method with guaranteed descent and an
efficient line search,” SIAM Journal on Optimization, vol. 16, no. 1, pp. 170–192, 2005.
5 Y. H. Dai and L. Z. Liao, “New conjugacy conditions and related nonlinear conjugate gradient
methods,” Applied Mathematics and Optimization, vol. 43, no. 1, pp. 87–101, 2001.
6 W. W. Hager and H. Zhang, “A survey of nonlinear conjugate gradient methods,” Pacific Journal of
Optimization, vol. 2, no. 1, pp. 35–58, 2006.
7 M. J. D. Powell, “Nonconvex minimization calculations and the conjugate gradient method,” in
Numerical Analysis (Dundee, 1983), vol. 1066 of Lecture Notes in Mathematics, pp. 122–141, Springer,
Berlin, Germany, 1984.
8 M. J. D. Powell, “Convergence properties of algorithms for nonlinear optimization,” SIAM Review,
vol. 28, no. 4, pp. 487–500, 1986.
9 J. C. Gilbert and J. Nocedal, “Global convergence properties of conjugate gradient methods for
optimization,” SIAM Journal on Optimization, vol. 2, no. 1, pp. 21–42, 1992.
10 L. Zhang, W. Zhou, and D. Li, “A descent modified Polak-Ribière-Polyak conjugate gradient method
and its global convergence,” IMA Journal of Numerical Analysis, vol. 26, no. 4, pp. 629–640, 2006.
11 Z. Wei, G. Y. Li, and L. Qi, “Global convergence of the Polak-Ribière-Polyak conjugate gradient
method with an Armijo-type inexact line search for nonconvex unconstrained optimization
problems,” Mathematics of Computation, vol. 77, no. 264, pp. 2173–2193, 2008.
12 L. Grippo and S. Lucidi, “A globally convergent version of the Polak-Ribière conjugate gradient
method,” Mathematical Programming, vol. 78, no. 3, pp. 375–391, 1997.
13 G. Yu, Y. Zhao, and Z. Wei, “A descent nonlinear conjugate gradient method for large-scale
unconstrained optimization,” Applied Mathematics and Computation, vol. 187, no. 2, pp. 636–643, 2007.
14 J. Zhang, Y. Xiao, and Z. Wei, “Nonlinear conjugate gradient methods with sufficient descent
condition for large-scale unconstrained optimization,” Mathematical Problems in Engineering, vol. 2009,
Article ID 243290, 16 pages, 2009.
15 Y. Xiao, Q. Wang, and D. Wang, “Notes on the Dai-Yuan-Yuan modified spectral gradient method,”
Journal of Computational and Applied Mathematics, vol. 234, no. 10, pp. 2986–2992, 2010.
16 Z. Wan, Z. Yang, and Y. Wang, “New spectral PRP conjugate gradient method for unconstrained
optimization,” Applied Mathematics Letters, vol. 24, no. 1, pp. 16–22, 2011.
17 L. Zhang, W. Zhou, and D. Li, “Global convergence of a modified Fletcher-Reeves conjugate gradient
method with Armijo-type line search,” Numerische Mathematik, vol. 104, no. 4, pp. 561–572, 2006.
18 G. Zoutendijk, “Nonlinear programming, computational methods,” in Integer and Nonlinear
Programming, J. A. badie, Ed., pp. 37–86, North-Holland, Amsterdam, Netherlands, 1970.
19 Y. H. Dai and Y. Yuan, Nonlinear Conjugate Gradient Method, vol. 10, Shanghai Scientific & Technical,
Shanghai, China, 2000.
20 J. J. Moré, B. S. Garbow, and K. E. Hillstrom, “Testing unconstrained optimization software,”
Association for Computing Machinery Transactions on Mathematical Software, vol. 7, no. 1, pp. 17–41, 1981.
21 E. D. Dolan and J. J. Moré, “Benchmarking optimization software with performance profiles,”
Mathematical Programming, vol. 91, no. 2, pp. 201–213, 2002.
Advances in
Operations Research
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Advances in
Decision Sciences
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Mathematical Problems
in Engineering
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Journal of
Algebra
Hindawi Publishing Corporation
http://www.hindawi.com
Probability and Statistics
Volume 2014
The Scientific
World Journal
Hindawi Publishing Corporation
http://www.hindawi.com
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
International Journal of
Differential Equations
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Volume 2014
Submit your manuscripts at
http://www.hindawi.com
International Journal of
Advances in
Combinatorics
Hindawi Publishing Corporation
http://www.hindawi.com
Mathematical Physics
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Journal of
Complex Analysis
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
International
Journal of
Mathematics and
Mathematical
Sciences
Journal of
Hindawi Publishing Corporation
http://www.hindawi.com
Stochastic Analysis
Abstract and
Applied Analysis
Hindawi Publishing Corporation
http://www.hindawi.com
Hindawi Publishing Corporation
http://www.hindawi.com
International Journal of
Mathematics
Volume 2014
Volume 2014
Discrete Dynamics in
Nature and Society
Volume 2014
Volume 2014
Journal of
Journal of
Discrete Mathematics
Journal of
Volume 2014
Hindawi Publishing Corporation
http://www.hindawi.com
Applied Mathematics
Journal of
Function Spaces
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Optimization
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014