Document 10949518
advertisement

Hindawi Publishing Corporation
Mathematical Problems in Engineering
Volume 2011, Article ID 370192, 28 pages
doi:10.1155/2011/370192
Research Article
A Defect-Correction Mixed Finite Element Method
for Stationary Conduction-Convection Problems
Zhiyong Si and Yinnian He
Faculty of Science, Xi’an Jiaotong University, Xi’an 710049, China
Correspondence should be addressed to Yinnian He, heyn@mail.xjtu.edu.cn
Received 29 July 2010; Revised 15 November 2010; Accepted 5 January 2011
Academic Editor: Katica R. Stevanovic Hedrih
Copyright q 2011 Z. Si and Y. He. This is an open access article distributed under the Creative
Commons Attribution License, which permits unrestricted use, distribution, and reproduction in
any medium, provided the original work is properly cited.
A defect-correction mixed finite element method MFEM for solving the stationary conductionconvection problems in two-dimension is given. In this method, we solve the nonlinear equations
with an added artificial viscosity term on a grid and correct this solution on the same grid using
a linearized defect-correction technique. The stability is given and the error analysis in L2 and
H 1 -norm of u, T and the L2 -norm of p are derived. The theory analysis shows that our method
is stable and has a good precision. Some numerical results are also given, which show that the
defect-correction MFEM is highly efficient for the stationary conduction-convection problems.
1. Introduction
In this paper, we consider the stationary conduction-convection problems in two dimension
whose coupled equations governing viscous incompressible flow and heat transfer for
the incompressible fluid are Boussinesq approximations to the stationary Navier-Stokes
equations.
P Find u, p, T ∈ X × M × W such that
−νΔu u · ∇u ∇p λjT,
div u 0,
x ∈ Ω,
−ΔT λu · ∇T 0,
u 0,
T T0 ,
x ∈ Ω,
x ∈ Ω,
1.1
x ∈ ∂Ω,
where Ω is a bounded domain in Ê2 assumed to have a Lipschitz continuous boundary ∂Ω.
u u1 x, u2 xT represents the velocity vector, px the pressure, Tx the temperature,
λ > 0 the Grashoff number, j 0, 1T the two-dimensional vector, and ν > 0 the viscosity.
2
Mathematical Problems in Engineering
As we know the conduction-convection problem contains the velocity vector field, the
pressure field and the temperature field, so finding the numerical solution of conductionconvection problems is very difficult. The conduction-convection problems is an important
system of equations in atmospheric dynamics and dissipative nonlinear system of equations,
so lots of works are devoted to this problem 1–6. There are also some works devoted to the
nonstationary conduction-convection problems 7–10. In 8, Luo et al. gave an optimizing
reduced PLSMFE for the nonstationary conduction-convection problems. They combined
PLSMEF method with POD to deal with the problems. In 11, an analysis of conduction
natural convection conjugate heat transfer in the gap between concentric cylinders under
solar irradiation was studied. In 12, a Newton iterative mixed finite element method for
the stationary conduction-convection problems was shown by Si et al. In 13, Si and He
gave a coupled Newton iterative mixed finite element method for the stationary conductionconvection problems.
The defect-correction method is an iterative improvement technique for increasing
the accuracy of a numerical solution without applying a grid refinement. Due to its
good efficiency, there are many works devoted to this method, for example, 14–28. In
18, a method making it possible to apply the idea of iterated defect correction to finite
element methods was given. A method for solving the time-dependent Navier-Stokes
equations, aiming at higher Reynolds’ number, was presented in 23. In 27, an accurate
approximations for self-adjoint elliptic eigenvalues was presented. In 28, Stetter exposed
the common structural principle of all these techniques and exhibit the principal modes of its
implementation in a discretization context.
In this paper we present a defect-correction MFEM for the stationary conduction
convection problems. In this method, we solve the nonlinear equations with an added
artificial viscosity term on a finite element grid and correct this solution on the same
grid using a linearized defect-correction technique. Actually, the defect-correction MFEM
incorporates the artificial viscosity term as a stabilizing factor, making both the nonlinear
system easier to resolve and the linearized system easier to precondition. The stability and
error analysis of the coupled the defect-correction MFEM show that this method is stable and
has a good precision. Some numerical experiments show that our analysis is proper and our
method is effective. And it can be used for solving the convection-conduction problems with
much small viscosity.
This paper is organized as follows. In Section 2, the functional settings and some
assumptions are given. Section 3 is devoted to the defect-correction MFEM. Section 4 gives
the stability analysis. Section 5 presents the error analysis. In Section 6, some numerical
results and the numerical analysis to validate the effectiveness of the method are laid out.
2. Functional Setting for the Conduction Convection Problems
In this section, we aim to describe some of the notations and results which will be frequently
used in this paper. The Sobolev spaces used in this context are standard 29. For the
mathematical setting of the conduction-convection problems and MFEM of conductionconvection problems 1.1, we introduce the Hilbert spaces
X H01 Ω2 ,
W H 1 Ω,
.
2
2
ϕ dx 0 .
M L0 Ω ϕ ∈ L Ω;
Ω
2.1
Mathematical Problems in Engineering
3
h is the uniformly regular family of triangulation of Ω, indexed by a parameter h maxK∈h {hK ; hK diamK}. We introduce the finite element subspace Xh ⊂ X, Mh ⊂ M,
Wh ⊂ W as follows
2
Xh vh ∈ X ∩ C0 Ω ; vh |K ∈ P K2 , ∀K ∈ h ,
Mh qh ∈ M ∩ C0 Ω ; qh |K ∈ Pk K, ∀K ∈ h ,
2.2
Wh φh ∈ W ∩ C0 Ω ; φh |K ∈ Pl K, ∀K ∈ h ,
where P K is the space of piecewise polynomials of degree on K, and 1, k 1, l
are three integers. W0h Wh ∩ H01 Ω, and Xh , Mh satisfies the discrete LBB condition
d ϕh , vh
vh ∈Xh ∇vh 0
sup
β ϕ h 0 ,
∀ϕh ∈ Mh ,
1
2.3
where dϕ, v ϕ, div v.
With the above notations, the Galerkin mixed variation and the mixed FEM problem
for the conduction-convection problems P are defined, respectively, as follows.
P Find u, p, T ∈ X × M × W such that
νau, v − d p, v d ϕ, u bu, u, v λ jT, v ,
a T, ψ λb u, T, ψ 0,
∀v ∈ X, ϕ ∈ M,
∀ψ ∈ W0 .
2.4
P Find uh , ph , Th ∈ Xh × Mh × Wh such that
νauh , vh − d ph , vh d ϕh , uh buh , uh , vh λ jTh , vh ,
a Th , ψh λb uh , Th , ψh 0,
∀vh ∈ Xh , ϕh ∈ Mh ,
∀ψh ∈ W0h ,
2.5
where au, v ∇u, ∇v, dϕ, v ϕ, div v, aT, ψ ∇T, ∇ψ, and
1
bu, v, w 2
1
b u, T, ψ 2
2
2
∂vk
∂wk
ui
wk dx −
ui
vk dx ,
∂xi
∂xi
Ω i,k1
i,k1
∀u, v, w ∈ X,
2
2
∂ψ
∂T
ui
ψ dx − ui
T dx ,
∂xi
∂xi
Ω i1
i
∀u ∈ X, T, ψ ∈ W.
The following assumptions and results are recalled see 7, 29–31.
2.6
4
Mathematical Problems in Engineering
A1 There exists a constant C0 which only depends on Ω, such that
i u0 ≤ C0 ∇u0 , u0,4 ≤ C0 ∇u0 , for all u ∈ H01 Ω2 or H01 Ω,
ii u0,4 ≤ C0 u1 , for all u ∈ H 1 Ω2 ,
√
1/2
2
1
1
iii u0,4 ≤ 2∇u1/2
0 u0 , for all u ∈ H0 Ω or H0 Ω.
0, α > 0, then, for T0 ∈ Ck,α ∂Ω, there exists an
A2 Assuming ∂Ω ∈ Ck,α k
k,α
extension in C0 Ê2 denote T0 also, such that
T0 k,q ≤ ε,
k
0, 1 ≤ q ≤ ∞,
2.7
where ε is an arbitrary positive constant.
A3 b·, ·, · and b·, ·, · have the following properties.
i For all u ∈ X, v, w ∈ X or T, ψ ∈ H01 Ω, there holds that
bu, v, v 0,
bu, v, w −bu, w, v,
2.8
bu, T, T 0,
b u, T, ψ −b u, ψ, T .
2.9
ii For all u ∈ X, v ∈ H 1 Ω2 or T ∈ H 1 Ω, for all w ∈ X or ψ ∈ H01 Ω,
there holds that
|bu, v, w| ≤ N∇u0 ∇v0 ∇w0 ,
b u, T, ψ ≤ N∇u0 ∇T0 ∇ψ 0 ,
2.10
2.11
where
N
supu,v,w |bu, v, w|
,
∇u0 ∇v0 ∇w0 supu,T,ϕ b u, T, ϕ .
N
∇u ∇T ∇ϕ
0
0
2.12
0
We recall the following existence, uniqueness and regularity result of P see 7,
Chapter 4.
Theorem 2.1 see 7. Under the assumption of (A1 )∼(A3 ), letting A ≡ 2ν−1 λ3C0 1T0 1 ,
B ≡ 2∇T0 0 2C02 λ−1 A, there exist 0 < δ1 , δ2 ≤ 1 such that
ν−1 NA ≤ 1 − δ1 ,
δ1−1 ν−1 C02 λ2 BN ≤ 1 − δ2 .
2.13
Then, there exists a unique solution u, p, T ∈ X × M × W for P , and
∇u0 ≤ A,
∇T0 ≤ B.
2.14
Mathematical Problems in Engineering
5
Some estimates of the trilinear form b are given in the following lemma and the proof
can be found in 30, 32–34.
Lemma 2.2. The trilinear form b satisfies the following estimate:
1/2
|buh , vh , w| |bvh , uh , w| |bw, uh , vh | ≤ C0 log h ∇vh 0 ∇uh 0 w0 ,
2.15
for all uh , vh ∈ Vh , w ∈ L2 Ω2 .
Lemma 2.3. Suppose that (A1 )∼(A3 ) are valid and ε is a positive constant, such that
32C02 λ2 Nε
< 1,
3ν
∇T0 0 ≤
ε
,
4
T0 0 ≤
C0 ε
,
4
2.16
then P has a unique solution uh , ph , Th ∈ Xh × Mh × Wh , such that T|∂Ω T0 and
∇uh 0 ≤
5C02 λε
,
3ν
∇Th 0 ≤ ε.
2.17
Proof. The proof of the existence and the uniqueness of the solution has been given by Luo
7. Let Th ωh T0 , ψh ωh in 2.5, we can get
aωh , ωh −λbuh , T0 , ωh − aT0 , ωh .
2.18
Using 2.11 and 2.16, we deduce
∇ωh 0 ≤ ∇T0 0 λNε∇uh 0 .
2.19
Letting vh uh , ϕh ph in the first equation of 2.5, we get
ν∇uh 20 λ jTh , uh ≤ λC0 Th 0 ∇uh 0 .
2.20
By 2.16, we can obtian
∇uh 0 ≤ ν−1 λC0 Th 0
≤ ν−1 λC0 ωh 0 T0 0 ≤ ν−1 λC02 ∇ωh 0 ν−1 λC0 T0 0
2.21
≤ ν−1 λC0 T0 0 ν−1 λC02 ∇T0 0 ν−1 λ2 C02 Nε∇uh 0 .
Using 2.16 again, we get
∇uh 0 ≤
5C02 λε
.
3ν
2.22
6
Mathematical Problems in Engineering
By 2.19, we deduce
∇Th 0 ≤ ∇ωh 0 ∇T0 0
≤ 2∇T0 0 λNε∇uh 0
≤ 2∇T0 0 ≤
2.23
5C02 λ2 Nε2
3ν
ε ε
ε.
2 2
We introduce the Laplace operator
Au −Δu,
∀u ∈ DA H 2 Ω2 ∩ X.
2.24
Lemma 2.4 see 35, 36. For all u, w ∈ X, v ∈ DA there holds that
|bu, v, w| |bv, u, w| |bw, u, v| ≤ CAv0 w0 ∇u0 .
2.25
3. The Defect-Correction Method
The aim of this section is to give a method for solving the nonlinear system 2.5 on a
coarser mesh than one uses when employing the standard FEM; the coarse-mesh solution
is corrected using the same grid in our method. The defect-correction method in which we
consider incorporates an artificial viscosity parameter σh as a stabilizing factor in the solution
algorithm. For a fixed grid parameter h the method requires the solution of one nonlinear
system and a few linear correction steps. It is described in the following paragraphs. We
consider the following problems which is identical to 2.5 except for an artificial viscosity
term.
P∗ Find u0h , ph0 , Th0 ∈ Xh × Mh × Wh such that
ν σha u0h , vh − d ph0 , vh d ϕh , u0h b u0h , u0h , vh λ jTh0 , vh ,
∀vh ∈ Xh , ϕh ∈ Mh ,
1 σha Th0 , ψh λb u0h , Th0 , ψh 0,
3.1
∀ψh ∈ W0h .
We define the residual or named defect Ru0h , ph0 , Th0 , Qu0h , ph0 , Th0 for the momentum systems
as follows:
R u0h , ph0 , Th0 , vh λ jTh0 , vh − νa u0h , vh d ph0 , vh
− d ϕh , u0h − b u0h , u0h , vh ,
Q u0h , ph0 , Th0 , ψh −a Th0 , ψh − λb u0h , Th0 , ψh .
3.2
Mathematical Problems in Engineering
7
Define the correction εh0 , 0h , τh0 satisfying the following linear problem:
ν σha εh0 , vh − d 0h , vh d ϕh , εh0 b εh0 , u0h , vh b u0h , εh0 , vh
R u0h , ph0 , Th0 , vh ,
∀vh ∈ Xh , ϕh ∈ Mh ,
1 σha τh0 , ψh λb u0h , τh0 , ψh λb εh0 , Th0 , ψh
Q u0h , ph0 , Th0 , ψh ,
3.3
∀ψh ∈ W0h .
Define u1h u0h ε0 , ph1 ph0 0h , Th1 Th0 τh0 , which are hoped to be better solutions of the
problems. In order to obtain the equations for u1h , ph1 , Th1 , we use the residual equation 3.2
to rewrite the linear problems 3.3; we obtain
P†
⎧
⎪
ν σha u1h , vh − d ph1 , vh d ϕh , u1h b u0h , u1h , vh b u1h , u0h , vh
⎪
⎪
⎪
⎪
⎪
⎪
⎨
λ jTh1 , vh σha u0h , vh b u0h , u0h , vh , ∀vh ∈ Xh , ϕh ∈ Mh ,
⎪
⎪
1 σha Th1 , ψh λb u1h , Th0 , ψh λb u0h , Th1 , ψh
⎪
⎪
⎪
⎪
⎪
⎩
σha Th0 , ψh λb u0h , Th0 , ψh , ∀ψh ∈ W0h .
3.4
In general, this method can be described as follows.
Step 1. Solve the nonlinear systems 3.1 for u0h , ph0 , Th0 .
Step 2. For i 1, 2, . . . , m, solve the linear equations
P‡
⎧
⎪
, uih , vh b uih , ui−1
, vh
ν σha uih , vh − d phi , vh d ϕh , uih b ui−1
⎪
h
h
⎪
⎪
⎪
i−1 i−1 ⎪
⎪
⎨
Thi , vh σha ui−1
∀vh ∈ Xh , ϕh ∈ Mh ,
h , vh b uh , uh , vh ,
⎪1 σha T i , ψ λb ui , T i−1 , ψ λb ui−1 , T i , ψ ⎪
⎪
h
h
h
h
h
h h
h
⎪
⎪
⎪
⎪
⎩
i−1
∀ψh ∈ W0h .
σha Thi−1 , ψh λb ui−1
h , Th , ψh ,
3.5
For each i the residual is given by
R uih , phi , Thi , vh λ jThi , vh − νa uih , vh d phi , vh
− d ϕh , uih − b uih , uih , vh ,
Q uih , phi , Thi , ψh −a Thi , ψh − λb uih , Thi , ψh .
3.6
8
Mathematical Problems in Engineering
The correction εhi , ih , τhi is given by
ν σha εhi , vh − d ih , vh d ϕh , εhi b εhi , uih , vh b uih , εhi , vh
R uih , phi , Thi , vh ,
∀vh ∈ Xh , ϕh ∈ Mh ,
3.7
1 σha τhi , ψh λb uih , τ i , ψh λb εhi , Thi , ψh
Q uih , phi , Thi , ψh ,
∀ψh ∈ W0h .
Remark 3.1. From the numerical experiments, we see that one or two correction steps is
adequate. And this is as same as 24.
4. Stability Analysis
In this section, we give the stability analysis. It is given by the following theorems.
Theorem 4.1. Under the assumptions of Lemma 2.3, then u0h , Th0 defined by P ∗ satisfies
0
∇uh ≤
0
5C02 λε
,
3ν σh
0
∇Th ≤ ε.
0
4.1
Moreover, if
25C02 Nλε
3ν σh2
4.2
< 1,
P ∗ admits a unique solution.
Proof. We define the set
BM 5C02 λε
.
vh ∈ Xh ; ∇
vh 0 ≤
3ν σh
4.3
Let u
h be in BM . Then
h , Th0 , ψh 0,
1 σha Th0 , ψh λb u
∀ψh ∈ W0h
4.4
has a unique solution Th0 ∈ Wh such that Th |∂Ω T0 . For a given Th0 , we consider the following
problem:
0∗
0∗
0∗
0∗
0
,
v
,
v
,
u
,
u
,
v
,
v
−
d
p
d
ϕ
b
u
λ
jT
,
ν σha u0∗
h
h
h
h
h
h
h
h
h
h
h
∀vh ∈ Xh , ϕh ∈ Mh .
4.5
Mathematical Problems in Engineering
9
, ph0∗ ∈
By the theory of the Navier-Stokes equations, we get 4.5 has a unique solution u0∗
h
0∗
h ∈ Xh ,
Xh × Mh see 31. It means that 4.4 and 4.5 give a unique uh ∈ Xh for a given u
we denote
4.6
h .
u0∗
h h u
Setting Th0 ωh0 T0 , ψh ωh0 in 4.4 and using 2.9, we can obtain
h , T0 , ωh0 − 1 σha T0 , ωh0 .
1 σha ωh0 , ωh0 −λb u
4.7
Using 2.7, 2.11, and 2.16, we can get
uh 0 ∇T0 0 1 σh∇T0 0 ,
1 σh∇ωh0 ≤ λN∇
0
λNε
uh 0 ∇T0 0 .
∇
∇ωh0 ≤
0
4
4.8
Using the triangle inequality, we have
0
∇Th ≤ ∇T0 0 ∇ωh0 0
0
≤
λNε
uh 0 2∇T0 0
∇
4
≤
5C02 Nλε2
ε
≤ ε.
12ν σh 2
4.9
Letting vh u0∗
, ϕh ph0 in 4.5 and using 2.8, we get
h
0∗
0
0∗
,
u
,
u
λ
jT
ν σha u0∗
h
h
h
h .
4.10
Letting Th0 ωh0 T0 and using 2.9, we have
2 0
≤
C
λ
ν σh∇u0∗
∇ω
0
h
h C0 λT0 0
0
0
≤ C02 λ2 N∇
uh 0 ∇T0 0 C0 λ1 C0 ∇T0 0
4.11
≤ C02 λε.
Namely,
0∗ ∇uh ≤
0
5C02 λε
.
3ν σh
4.12
10
Mathematical Problems in Engineering
Hence, we proved that h maps BM to BM . It follows from Brouwer’s fixed-point theorem
that there exits a solution to system P ∗ .
01
01
02 02
02
To prove the uniqueness, assume that u01
h , ph , Th , uh , ph , Th ∈ Xh × Mh × Wh , and
∗
01
02
Th |∂Ω Th |∂Ω T0 are two solutions of P . Then, we obtain that
02
01
02
01
02
02
01
b u01
ν σha u01
h − uh , vh − d ph − ph , vh d ϕh , uh − uh
h − uh , uh , vh
01
02
01
02
b u02
,
u
−
u
,
v
−
T
λ
j
T
h
h
h
h
h
h , vh ,
∀vh ∈ Xh , ϕh ∈ Mh ,
01
02
01
02
01
1 σha Th01 − Th02 , ψh λb u02
h , Th − Th , ψh λb uh − uh , Th , ψh 0,
∀ψh ∈ W0h .
4.13
02
01
02
Let vh u01
h − uh , ϕh ph − ph in the first equation of 4.13, we can get
02 01
02 01 2 01
02 −
u
≤
N
u
−
u
C
λ
ν σh∇ u01
∇
∇u
0 ∇ Th − Th .
h
h
h
h
h
0
0
0
0
4.14
Setting ψh Th01 − Th02 in the second equation of 4.13, we obtain
02 01 1 σh∇ Th01 − Th02 ≤ λN ∇ u01
h − uh ∇Th .
0
0
4.15
0
By 4.14 and 4.15, we deduce
02 ν σh∇ u01
h − uh 0
01
02 2 2 01 01
02 ≤ N ∇u01
−
u
C
λ
N
−
u
∇u
∇u
∇T
0
h
h
h
h
h
h 0
≤
0
0
0
4.16
5C02 Nλε C02 λNε 02 01
02 −
u
−
u
∇u01
∇u
h
h
h
h 0 .
0
3ν σh
4ν
Using 4.2, we obtain
2
02 −
u
≤
− u02
∇ u01
∇ u01
.
h
h
h
h
0
0
5
4.17
02 −
u
∇ u01
h
h 0.
4.18
Namely,
0
By 4.15, we see that ∇Th01 −Th02 0 0. Therefore, it follows that P ∗ has a unique solution.
Then, we give the prove of 4.1 without using 4.2. Letting vh u0h , ϕh ph0 in the
first equation of 3.1 and using 2.8, we get
ν σha u0h , u0h λ jTh0 , u0h .
4.19
Mathematical Problems in Engineering
11
Letting Th0 ωh0 T0 , we have
ν σh∇u0h ≤ C02 λ∇ωh0 C0 λT0 0 .
0
0
4.20
Letting Th0 ωh0 T0 , ψh ωh0 in the second equation of 3.1 and using 2.9, we can obtain
1 σha ωh0 , ωh0 −λb u0h , T0 , ωh0 − 1 σha T0 , ωh0 .
4.21
Using 2.7, 2.11, and 2.16, we can get
1 σh∇ωh0 ≤ λN ∇u0h ∇T0 0 1 σh∇T0 0 ,
0
0
λNε 0
∇uh ∇T0 0 .
∇ωh0 ≤
0
0
4
4.22
By 4.20 and 4.22, we can deduce
0
∇uh ≤ ν σh−1 λC02 ∇ωh0 ν σh−1 C0 λT0 0
0
0
≤ ν σh
−1
λC0 T0 0 C02 λ∇T0 0
C02 λ2 Nε 0
∇uh .
0
4
4.23
Using 2.16, we get
0
∇uh ≤
0
5C02 λε
.
3ν σh
4.24
Using 2.7, 2.11, 2.16, and 4.20, we can get
∇ωh0 ≤ λN ∇u0h ∇T0 0 ∇T0 0
0
0
λNε 0
≤
∇uh ∇T0 0
0
4
3ε
,
4
0
∇Th ≤ ∇ωh0 ∇T0 0
≤
0
0
≤ ε.
Therefore, we finish the proof.
4.25
12
Mathematical Problems in Engineering
Theorem 4.2. Under the assumptions of Lemma 2.3, and
25C02 Nλε
3ν σh2
4.26
< 1,
u1h , Th1 defined by 3.4 satisfies
1
∇uh ≤ δ,
5ε
1
λNδε σhε,
∇Th ≤
0
6
0
4.27
.
where δ 103C02 λε/48 σh5C02 λε/3ν/7/10ν σh.
Proof. Letting vh u1h , ϕh ph1 in the first equation of 3.4 and using 2.8, we get
ν σha u1h , u1h b u1h , u0h , u1h b u0h , u0h , u1h σha u0h , u1h λ jTh0 , u1h .
4.28
Letting Th0 ωh0 T0 and using 2.10, we have
2
ν σh∇u1h ≤ N ∇u1h ∇u0h σh∇u0h N ∇u0h 0
0
0
C02 λ∇ωh1 C0 λT0 0 .
0
0
4.29
0
Let Th1 ωh1 T0 , ψh ωh1 in the second equation of 3.4, we can obtain
1 σha ωh1 , ωh1 −λb u0h , T0 , ωh1 − λb u1h , Th0 , ωh1 λb u0h , Th0 , ωh1
σha Th0 , ωh1 − 1 σha T0 , ωh1 .
4.30
Using 2.11 and 2.16, we can get
1 σh∇ωh1 ≤ λN ∇u0h ∇T0 0 λN ∇u1h ∇Th0 0
0
0
0
0
4.31
0
4.32
0
∇ωh1 ≤ λN ∇u0h ∇T0 0 λN ∇u1h ∇Th0 0
0
λN ∇u0h ∇Th0 σh∇Th0 1 σh∇T0 0 ,
0
0
λN ∇u0h ∇Th0 σh∇Th0 ∇T0 0 .
0
0
0
Mathematical Problems in Engineering
13
Using 4.29, we get
ν σh∇u1h 0
2
≤ N ∇u1h ∇u0h σh∇u0h N ∇u0h 0
0
0
0
C02 λ λN ∇u0h ∇T0 0 λN ∇u1h ∇Th0 λN ∇u0h ∇Th0 0
0
∇Th0 ∇T0 0 C0 λT0 0 .
0
0
0
4.33
0
ν σh − N ∇u0h − C02 λ2 N ∇Th0 ∇u1h 0
0
0
2
≤ N ∇u0h σh∇u0h C02 λ2 N ∇u0h ∇T0 0 C02 λ2 N ∇u0h ∇Th0 0
0
C02 λ∇Th0 C02 λ∇T0 0 C0 λT0 0 .
0
0
0
0
Using 2.16, 4.26, and Theorem 4.2, we can obtain
10NC04 λ3 ε2 3C02 λ2 ε2
25NC04 λ2 ε2
5C02 λε
7
σh
ν σh∇u1h ≤
0
10
3ν σh
3ν σh
2
9ν σh2
5C02 λε
103C02 λε
σh
.
≤
48
3ν σh
4.34
Namely,
103C02 λε/48 σh 5C02 λε/3ν .
1
δ.
∇uh ≤
0
7/10ν σh
4.35
Using 2.16, 4.31, and 4.35, we can get
10NC02 λ2 ε2
ε
λNδε σhε ∇ωh1 ≤
0
3ν σh
4
≤
ε ε
λNδε σhε
3 4
7ε
λNδε σhε.
12
4.36
Using the triangle inequality, we can get
5ε
1
λNδε σhε.
∇Th ≤ ∇ωh1 ∇T0 0 ≤
0
0
6
Therefore, we finish the proof.
4.37
14
Mathematical Problems in Engineering
5. Error Analysis
In this section, we establish the H 1 and L2 -bounds of the error u − uih , T − Thi , i 0, 1 and
L2 -bound of the error p − phi , i 0, 1. In order to obtain the error estimates, we define the
Galerkin projection Rh , Qh Rh u, p, Qh u, p : X, M → Xh , Mh , such that
aRh − u, vh − d Qh − p, vh d qh , Rh − u 0,
∀ u, p ∈ X, M, vh , qh ∈ Xh , Mh .
5.1
Lemma 5.1 see 37, 38. The Galerkin projection Rh , Qh satisfies
Rh − u0 h ∇Rh − u0 Qh − p0 ≤ Chr1 νur1 pr ,
r 1, 2.
5.2
Lemma 5.2 see 7. There exits rh : W → Wh for all ψ ∈ W holds that
∇ ψ − rh ψ , ∇ψh 0,
Ω
ψ − rh ψ dx 0,
∀ψh ∈ Wh ,
5.3
∇rh ψ ≤ ∇ψ .
0
0
5.4
−1 ≤ s ≤ m, 0 ≤ k ≤ r 1.
5.5
When ψ ∈ W k,q Ω 1 ≤ q ≤ ∞, there holds
ψ − rh ψ −s,q
≤ Chks ψ k,q ,
There exits r h : W0 → W0h for all ψ ∈ W0 holds that
∇ ψ − r h ψ , ∇ψh 0,
∀ψh ∈ W0h ,
∇r h ψ ≤ ∇ψ .
0
0
5.6
When ψ ∈ W r,q Ω 1 ≤ q ≤ ∞, there holds
ψ − r h ψ −s,q
≤ Chks ψ r,q ,
−1 ≤ s ≤ r, 0 ≤ k ≤ r 1.
5.7
Lemma 5.3 see 7. If (A1 )∼(A3 ) hold and u, p, T ∈ H r1 Ω × H r Ω × H r1 Ω and
uh , Ph , Th are the solution of problem P and P , respectively, then there holds that
∇u − uh 0 p − ph 0 ∇T − Th 0 ≤ Chr ur1 pr Tr1 .
5.8
Mathematical Problems in Engineering
15
Lemma 5.4. Under the assumptions of Lemma 2.3, uh , ph , Th is the solution of 3.1, u0h , ph0 , Th0 defined by 3.4, then there hold
50σC02 λh 10C02 λσεh
,
∇uh − u0h ≤
0
21ν
7ν
σhε
,
∇Th − Th0 ≤ 2σhε 0
14ν
95σhC02 λε 19σhC02 λε
σhC02 λ
σhC02 λ .
βph − ph0 ≤
0
21ν
7
14ν
5.9
Proof. Subtracting 3.1 from 2.5 we get the error equations, namely uh − u0h , ph − ph0 , Th − Th0 satisfy
νa uh − u0h , vh − σha u0h , vh d ϕh , uh − u0h − d ph − ph0 , vh b u0h , uh − u0h , vh
b uh − u0h , uh , vh λ j Th − Th0 , vh ,
∀vh ∈ Xh , ϕh ∈ Mh ,
a Th − Th0 , ψh − σha Th0 , ψh λb uh − u0h , Th , ψh b u0h , Th − Th0 , ψh 0,
∀ψh ∈ W0h .
5.10
Letting vh uh − u0h , ϕh ph − Ph0 in the first equation of 5.10 and using 2.11, 2.8, and
A1 , we can get
ν∇ uh − u0h ≤ σh∇u0h N ∇ uh − u0h ∇uh 0 C02 λ∇ Th − Th0 .
0
0
0
5.11
0
Hence, we deduce
ν − N∇uh 0 ∇ uh − u0h ≤ σh∇u0h C02 λ∇ Th − Th0 .
0
0
5.12
0
Letting ψh Th − Th0 in the second equation of 5.10 and using 2.9, we obtain
a Th − Th0 , Th − Th0 σha Th0 , Th − Th0 λb uh − u0h , Th , Th − Th0 0.
5.13
Using 2.11, we can get
∇Th − Th0 ≤ σh∇Th0 λN ∇uh − u0h ∇Th 0 .
0
0
5.14
0
By 5.12, we deduce
ν − N∇uh 0 ∇ uh − u0h ≤ σh∇u0h C02 λσh∇Th0 C02 λ2 N ∇uh − u0h ∇Th 0 .
0
0
0
0
5.15
16
Mathematical Problems in Engineering
Using 4.1, we can obtain
3ν ν − N∇uh 0 −
∇ uh − u0h ≤ σh∇u0h C02 λσh∇Th0 0
0
0
32
5σhC02 λε
C02 λσhε.
≤
3ν σh
5.16
By using 2.16 and 2.17, there holds
ν − N∇uh 0 −
3ν 7ν
≥
.
32 10
5.17
Therefore, we can deduce
10C02 λσhε
50σhC02 λε
.
∇uh − u0h ≤
0
21νν σh
7ν
5.18
By 5.14 and 5.18, we can have
∇Th − Th0 ≤ σhε λNε
0
10C02 λσhε
50σhC02 λε
21νν σh
7ν
5.19
σhε
≤ 2σhε .
14ν
Letting ϕh 0, vh uh − u0h in the first equation of 5.10 and using 2.3, we have
βph − ph0 ≤ ν∇uh − u0h σh∇u0h N ∇uh − u0h ∇uh 0 C02 λ∇Th − Th0 0
0
≤
50σhC02 λε
21ν σh
0
10σhC02 λε
7
σhC02 λε σhC02 λ ≤
0
5σhC02 λε
3ν
10σhC02 λε
21ν
7
σhC02 λ
14ν
σhC02 λ
95σhC02 λε 19σhC02 λε
σhC02 λ .
21ν σh
7
14ν
Hence, we finish the proof.
0
2σhC02 λε
5.20
Mathematical Problems in Engineering
17
Theorem 5.5. Under the assumptions of Lemmas 2.3 and 5.3, the following inequality
∇u − u0h p − ph0 ∇T − Th0 ≤ Chr ur1 pr Tr1 Ch,
0
0
0
5.21
holds, where C is a positive constant numbers.
Proof. By Lemmas 5.3, 5.4, and the triangle inequality this theorem is obviously true.
Lemma 5.6. For all u ∈ H 2 Ω ∩ X, ω ∈ W0 , ψ ∈ H 2 Ω ∩ W0 , there hold that
b u − Rh , ω, ψ ≤ Cu − Rh 0 Aω0 ∇ψ 0 ,
b u, T − rh T, ψ ≤ CAu T − rh T ∇ψ .
0
0
5.22
5.23
0
Proof. Letting ω ω, 0T , we have
b u − Rh , ω, ψ b u − Rh , ω, ψ .
5.24
Using 2.25, we can deduce 5.22. Because T − rh T ∈ W0 , 5.23 holds.
Theorem 5.7. Under the assumptions of Lemmas 2.3 and 5.3, the following inequality:
u − u0h T − Th0 ≤ Chr1 ur1 pr Tr1 Ch,
0
5.25
0
holds, where C is a positive constant.
Proof. Subtracting 3.1 from 2.4 we get the error equations, namely,
νa u − u0h , vh − σha u0h , vh b u − u0h , u0h , vh b u, u − u0h , vh − d p − ph0 , vh
d ϕh , u − u0h λ j T − Th0 , vh ,
∀vh ∈ Xh , ϕh ∈ Mh ,
a T − Th0 , ψh − σha Th0 , ψh λb u − u0h , T, ψh λb u0h , T − Th0 , ψh 0,
∀ψh ∈ W0h .
5.26
Letting eh0 Rh − u0h , ηh0 Qh − ph0 , ξh0 rh T − Th0 and using 5.1 and 5.3, we can get
νa eh0 , vh − σha u0h , vh b u − u0h , u0h , vh b u, u − u0h , vh − d ηh0 , vh d ϕh , eh0
λ j T − Th0 , vh ,
∀vh ∈ Xh , ϕh ∈ Mh ,
a ξh , ψh − σha Th0 , ψh λb u − u0h , T, ψh λb u0h , T − Th0 , ψh 0,
∀ψh ∈ W0h .
5.27
18
Mathematical Problems in Engineering
Taking vh eh0 , ϕh ηh0 in the first equation of 5.27, we obtain
νa eh0 , eh0 − σha u0h , eh0 b eh0 , u0h , eh0 b u − Rh , u0h , eh0 b u, u − Rh , eh0
λ j T − Th0 , eh0 ,
5.28
∀vh ∈ Xh , ϕh ∈ Mh .
Using 2.10 and A1 , we deduce
2 ν − N ∇u0h ∇eh0 ≤ b u − Rh , u, eh0 b u0h , u − Rh , eh0 0
0
λ j T − Th0 , eh0 σha u0h , eh0 ≤ N ∇u0 ∇u0h ∇u − Rh 0 ∇eh0 5.29
0
0
C02 λ∇T − Th0 ∇eh0 σh∇u0h ∇eh0 .
0
0
0
0
Using Theorem 2.1, 2.16, 4.1, and 5.2, we can obtain
0
∇eh ≤ Chr1 ur1 pr Tr1 Ch.
0
5.30
Taking ψh ξh0 in the second equation of 5.27 and using 2.9 we have
a ξh0 , ξh0 − σha Th0 , ξh0 λb u0h , T − rh T, ξh0 λb u − Rh , T, ξh0 λb eh0 , T, ξh0 0.
5.31
By 2.9, we have
b u0h , T − rh T, ξh0 b u − Rh , T, ξh0 b eh0 , T, ξh0
−b eh0 , T − rh T, ξh0 − b u − Rh , T − rh T, ξh0 b u, T − rh T, ξh0
b u − Rh , T, ξh0 b eh0 , T − rh T, ξh0 b eh0 , ξh0 , ξh0 b eh0 , Th0 , ξh0 .
5.32
Mathematical Problems in Engineering
19
Letting T ω T0 , ω ∈ W0 and using Lemma 5.6, we can get
b u0h , T − rh T, ξh0 b u − Rh , T, ξh0 b eh , T, ξh0 ≤ N ∇eh0 ∇T − rh T0 ∇ξh0 N∇u − Rh 0 ∇T − rh T0 ∇ξh0 0
0
N ∇eh0 ∇T − rh T0 ∇ξh0 N ∇eh0 ∇Th0 ∇ξh0 0
0
0
0
CAu0 T − rh T0 ∇ξh0 Cu − Rh 0 Aω0 ∇ξh0 0
0
5.33
0
0
C∇u − Rh 0 ∇T0 0 ∇ξh0 .
0
By assumption A2 , letting ε < h and using Lemma 5.1 and 2.16, 4.26, and 5.33, we can
deduce
0
∇ξh ≤ Chr1 ur1 pr Tr1 Ch.
5.34
0
Hence, we have
T − Th0 ≤ T − rh T0 ξh0 0
0
≤ T − rh T0 C0 ∇ξh0 5.35
0
≤ Chr1 ur1 pr Tr1 Ch.
By 2.10 and 2.25, we can deduce
b u − Rh , u, eh0 b u0h , u − Rh , eh0 ≤ b u − Rh , u, eh0 b u, u − Rh , eh0 b u − Rh , u − Rh , eh0 b eh , u − Rh , eh0 5.36
≤ CAu0 u − Rh 0 ∇eh0 0
N ∇u − Rh 0 ∇eh0 ∇u − Rh 0 ∇eh0 0
≤ Ch2 ∇eh0 .
0
0
20
Mathematical Problems in Engineering
Using 5.29, we can obtain
ν − N ∇u0h 0
0 2
∇eh ≤ Chr1 ur1 pr Tr1 ∇eh0 0
0
C0 λT − Th0 ∇eh0 σh∇u0h ∇eh0 .
0
0
0
5.37
0
By using 2.16 and 4.1, there holds
4ν
ν − N ∇u0h ≥
.
0
5
5.38
0
∇eh ≤ Chr1 ur1 pr Tr1 Ch.
5.39
Hence, we can deduce from 5.37
0
Therefore, we can deduce
u − u0h 0 ≤ u − Rh 0 eh0 0
≤ u − Rh 0 C0 ∇eh0 5.40
0
≤ Chr1 ur1 pr Tr1 Ch.
Theorem 5.8. Under the assumptions of Lemmas 2.3 and 5.3, then there holds
∇u − u1h ∇T − Th1 ≤ Chr ur1 pr Tr1 Ch2 ,
0
0
u − u1h T − Th1 hp − ph1 ≤ Chr1 ur1 pr Tr1 Ch2 ,
0
0
5.41
0
where C is a positive constant.
Proof. Subtracting 3.4 from 2.4 we get the error equations, namely,
νa u − u1h , vh − σha u1h , vh bu, u, vh − b u1h , u0h , vh
− b u0h , u1h , vh − d p − ph1 , vh d ϕh , u − u1h
λ j T − Th1 , vh − b u0h , u0h , vh − σha u0h , vh ,
∀vh ∈ Xh , ϕh ∈ Mh ,
a T − Th1 , ψh − σha Th1 , ψh λb u, T, ψh − λb u1h , Th0 , ψh − λb u0h , Th1 , ψh
−σha Th0 , ψh − λb u0h , Th0 , ψh ,
∀ψh ∈ W0h .
5.42
Mathematical Problems in Engineering
21
Letting eh1 Rh − u1h , ηh1 Qh − ph1 , ξh1 rh T − Th1 , using 5.1 and 5.3 and adding and
subtracting appropriate terms in the above expression yields
ν σha eh1 , vh b u0h , u − u1h , vh b u − u1h , u0h , vh − d ηh1 , vh d ϕh , eh1
λ j T − Th0 , vh σha Rh − u0h , vh − b u − u0h , u − u0h , vh ,
∀vh ∈ Xh , ϕh ∈ Mh ,
1 σha ξh1 , ψh λb u0h , T − Th1 , ψh − λb u − u1h , Th0 , ψh
σha rh T − Th0 , ψh − λb u − u0h , T − Th0 , ψh ,
∀ψh ∈ W0h .
5.43
Letting vh eh1 , ϕh ηh1 in the first equation of 5.43, we can deduce
ν σha eh1 , eh1 b u0h , u − Rh , eh1 b u − Rh , u0h , eh1 b eh1 , u0h , eh1
λ j T − Th0 , eh1 σha Rh − u0h , eh1 − b u − u0h , u − u0h , eh1
5.44
By 2.10 and 2.25, we can deduce
ν σh − N ∇u0h ∇eh1 ≤ CAu0h u − Rh 0 σh∇Rh − u0h 0
0
0
2
N ∇u − u0h λC0 T − Th0 .
0
0
5.45
0
Using 2.16, 4.1, 4.26, 5.21, and 5.2, we can obtain
1
∇eh ≤ Chr1 ur1 pr Tr1 Ch2 .
0
5.46
Using 5.2 and triangle inequality, we can have
∇u − u1h ≤ ∇u − Rh 0 ∇e1 0
0
≤ Chr ur1 pr Tr1 Ch2 ,
u − u1h ≤ u − Rh 0 e1 0
0
≤ u − Rh 0 C0 ∇e1 0
≤ Chr1 ur1 pr Tr1 Ch2 .
5.47
22
Mathematical Problems in Engineering
Letting ψh ξh1 in the second equation of 5.43 and using 2.8, we can deduce
1 σha ξh1 , ξh1 λb u0h , T − rh T, ξh1 − λb u − u1h , Th0 , ξh1
σha T −
Th0 , ξh1
− λb u −
u0h , T
−
Th0 , ξh1
5.48
.
Letting Th0 ωh0 T0 and using 2.11, 5.22, and 5.23, we have
1 σh∇ξh1 ≤ CλAu0h T − rh T0 Cλu − u1h Aωh0 0
0
0
Nλ∇u − u1h ∇T0 0 σh∇T − Th0 0
λN ∇u − u0h ∇T − Th0 .
0
0
5.49
0
0
Using 5.5, 5.21, 5.47, we can obtain
1
∇ξh ≤ Chr1 ur1 pr Tr1 Ch2 .
5.50
0
Using 5.2 and triangle inequality, we can have
∇T − Th1 ≤ ∇T − rh T0 ∇ξh1 0
0
≤ Ch ur1 pr Tr1 Ch2 ,
T − Th1 ≤ T − rh T0 ξh1 ≤ T − rh T0 C0 ∇ξh1 r
0
≤ Ch
0
ur1 pr Tr1 Ch2 .
r1 5.51
0
Taking ϕh 0, vh Rh − u1h in the first equation of 5.43 and using 2.3, we have
βηh1 ≤ ν σh∇eh1 σh∇u − u0h 2N ∇u0h ∇u − u1h 0
0
0
2
C0 λT − Th0 N ∇u − u0h .
0
0
5.52
0
By 4.1, 5.21, and 5.47, we can deduce
1
ηh ≤ Chr ur1 pr Tr1 Ch2 .
0
5.53
Mathematical Problems in Engineering
23
u1 u2 0
∂ T/∂ n 0
T 4y1 − y
u1 u2 0 T 0
u1 u2 0
∂ T/∂ n 0
u1 u2 0
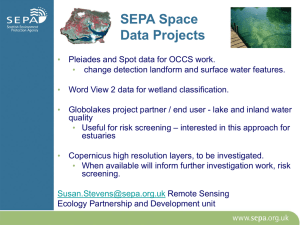
Figure 1: Physics model of the cavity flows.
0.4
5
1
0.2
0.35
0.3
1
0.4
4
0.45
4
3
0.8
0.6
0.6
0.7 5
0.75
0.8
0.85
0.
0.95 9
0.35
0.3
0.25
0.6
0.2
0.6
−14
0.4
0.1
0.4
0
−12
− 3 4
−−
−56
− −7
−8 9
− 10
− 11
− 12
− 3
−1
Y
0.15
Y
2
1
0.5
5
0.5
0.4
0.8
4
0.05
0.2
0
0.2
0
0.2
0.4
0.6
0.8
1
0
0
0.2
0.4
X
0.6
0.8
1
X
a
b
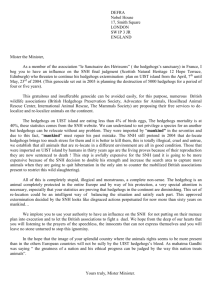
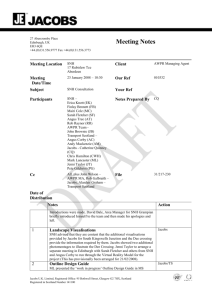
Figure 2: The numerical
Isotherms a and the numerical Isobar b for ν 1/2000 by the defect-correction
√
MFEM with h 2/40, σ 0.4.
Using 5.2 and triangle inequality, we can have
p − ph1 ≤ p − Qh 0 ηh1 ≤ Chr ur1 pr Tr1 Ch2 .
0
0
5.54
6. Numerical Experiments
In this section, we present some numerical examples with a physical model of square cavity
stationary flow. We choose different ν for comparison. The side length of the square cavity
and the boundary conditions are given by Figure 1. From Figure 1, we can see that the T 0
24
Mathematical Problems in Engineering
1
0.8
0.6
Y
0.4
0.2
0
0
0.2
0.4
0.6
0.8
1
X
√
2/40, σ 0.4.
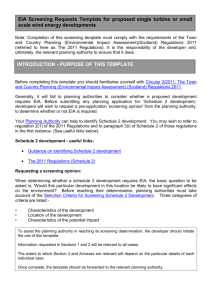
Figure 3: The numerical streamline for ν 1/2000 by the defect-correction MFEM with h 0.5
0.6
0.65
0.7
0.75
0.
0.85 8
5
0.3
173
0.6
0.9
0.3
13.6
0.8
0.5
5
0.4
0.6
13.6173
5
0.4
0.45
0.8
0.95
Y
1
5
0.2
5
0.3
0.4
1
0.2
5
13
10
.61
73
5
0
−5
−10
−15
−20
−25
−30
−35
−40
−45
Y
13.6173
0.2
0.4
5
0.1
0.4
0.1
5
0.0
0.2
0.2
13.61
0
0
0.2
0.4
0.6
0.8
1
0
0
73
0.2
0.4
X
a
0.6
0.8
1
X
b
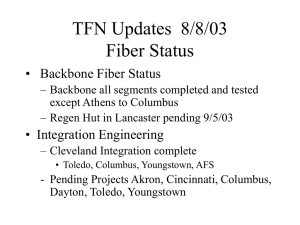
Figure 4: The numerical
Isotherms a and the numerical Isobar b for ν 1/5000 by the defect-correction
√
MFEM with h 2/100, σ 0.4.
on left and lower boundaries, ∂T/∂n 0 on upper boundary, and T 4y1 − y on right
boundary of the cavity. We use P2 − P1 − P2 finite element here.
√ Firstly, we choose ν 1/2000, σ 0.4 and divide the cavity into M×N 40×40, that is,
h 2/40. Figure 2 gives the numerical isotherms a and the numerical isobar b. Figure 3
gives the numerical streamline. From the numerical results, we can see that our method is
stable and has a good precision.
Secondly, we choose ν 1/5000, σ 0.4 to show our our method suiting for solving
the conduction convection problems with small viscosity. It is well known that it is more and
more difficult to solve the problem by numerical method as ν changing smaller and smaller.
Mathematical Problems in Engineering
25
1
0.8
0.6
Y
0.4
0.2
0
0
0.2
0.4
0.6
0.8
1
X
Figure 5: The numerical streamline for ν 1/5000 by the defect-correction MFEM with h σ 0.4.
1
5
0.4
0.2
0.3.35
0
0.4
1
15
659
0.5
0.5
5
0.8
0.6
0.65
0.7
0.75
0.8
0.
0.9 85
0.6
0.95
Y
0.2
5
59
5
0.3
.46
0.4
0.3
0.6
10
5
0
−5
−10
−15
20
−25
30
−35
−40
−45
−50
16.4
16
0.45
0.8
√
2/100,
−55
Y
0.2
0.1
16.4659
0.4
5
0.1
0.4
5
0.0
0.2
0.2
659
16.4
0
0
0.2
0.4
0.6
0.8
1
0
0
0.2
16.4659
0.4
X
a
0.6
0.8
1
X
b
Figure 6: The numerical
Isotherms a and the numerical Isobar b for ν 1/6000 by the defect-correction
√
MFEM with h 2/100, σ 0.4.
√
Hence, we divide the cavity into M × N 100 × 100, namely h 2/100. Figure 4 gives
the numerical isotherms a and the numerical isobar b, and Figure 5 shows the numerical
streamline. At last, we choose ν 1/6000, σ 0.4. Figure 6 gives the numerical isotherms a
and the numerical isobar b, and Figure 7 shows the numerical streamline.
Just as Remark 3.1, we only use one correction step in our numerical experiments.
From the numerical, we can see that when ν 0.5 × 10−3 the numerical streamline is very
regular. The pressure is small near the wall. But the numerical streamline changes more and
more immethodical with ν changing smaller and smaller. And the pressure changes bigger
26
Mathematical Problems in Engineering
1
0.8
0.6
Y
0.4
0.2
0
0
0.2
0.4
0.6
0.8
1
X
Figure 7: The numerical streamline for ν 1/6000 by the defect-correction MFEM with h σ 0.4.
√
2/100,
near the wall. In conclusion, the defect-correction MFEM is highly efficient for the stationary
conduction-convection problems and it can be used for solving the convection-conduction
problems with much small viscosity.
Acknowledgments
The authors would like to thank the editor and the referees for their criticism, valuable
comments, which led to the improvement of this paper. This work is supported by the NSF of
China no. 10971166 and the National High Technology Research and Development program
of China 863 program, no. 2009AA01A135.
References
1 J. A. M. Garcı́a, J. M. G. Cabeza, and A. C. Rodrı́guez, “Two-dimensional non-linear inverse heat
conduction problem based on the singular value decomposition,” International Journal of Thermal
Sciences, vol. 48, no. 6, pp. 1081–1093, 2009.
2 Z. D. Luo and X. M. Lu, “A least-squares Galerkin/Petrov mixed finite element method for stationary
conduction-convection problems,” Mathematica Numerica Sinica, vol. 25, no. 2, pp. 231–244, 2003.
3 M. S. Mesquita and M. J. S. de Lemos, “Optimal multigrid solutions of two-dimensional convectioncondition problems,” Applied Mathematics and Computation, vol. 152, no. 3, pp. 725–742, 2004.
4 C. P. Naveira, M. Lachi, R. M. Cotta, and J. Padet, “Hybrid formulation and solution for transient
conjugated conduction-external convection,” International Journal of Heat and Mass Transfer, vol. 52,
no. 1-2, pp. 112–123, 2009.
5 Q. W. Wang, M. Yang, and W. Q. Tao, “Natural convection in a square enclosure with an internal
isolated vertical plate,” Wärme- und Stoffübertragung, vol. 29, no. 3, pp. 161–169, 1994.
6 M. Yang, W. Q. Tao, Q. W. Wang, and S. S. Lue, “On identical problems of natural convection in
enclosures and applications of the identity character,” Journal of Thermal Science, vol. 2, no. 2, pp. 116–
125, 1993.
7 Z. D. Luo, The Bases and Applications of Mixed Finite Element Methods, Science Press, Beijing, China,
2006.
Mathematical Problems in Engineering
27
8 Z. Luo, J. Chen, I. M. Navon, and J. Zhu, “An optimizing reduced PLSMFE formulation for nonstationary conduction-convection problems,” International Journal for Numerical Methods in Fluids, vol.
60, no. 4, pp. 409–436, 2009.
9 J. N. Reddy and D. K. Gartling, The Finite Element Method Transfer and Fluid Dunamics, CRC Pess,
Washington, DC, USA, 2nd edition, 2000.
10 L. Q. Tang and T. T. H. Tsang, “A least-squares finite element method for time-dependent
incompressible flows with thermal convection,” International Journal for Numerical Methods in Fluids,
vol. 17, no. 4, pp. 271–289, 1993.
11 D. C. Kim and Y. D. Choi, “Analysis of conduction-natural convection conjugate heat transfer in the
gap between concentric cylinders under solar irradiation,” International Journal of Thermal Sciences,
vol. 48, no. 6, pp. 1247–1258, 2009.
12 Z. Si, T. Zhang, and K. Wang, “A Newton iterative mixed finite element method for stationary
conduction-convection problems,” International Journal of Computational Fluid Dynamics, vol. 24, no.
3-4, pp. 135–141, 2010.
13 Z. Si and Y. He, “A coupled Newton iterative mixed fixed element method for stationary conductionconvection problems,” Computing, vol. 89, no. 1-2, pp. 1–25, 2010.
14 O. Axelsson and M. Nikolova, “Adaptive refinement for convection-diffusion problems based on a
defect-correction technique and finite difference method,” Computing, vol. 58, no. 1, pp. 1–30, 1997.
15 V. Ervin and W. Layton, “An analysis of a defect-correction method for a model convection-diffusion
equation,” SIAM Journal on Numerical Analysis, vol. 26, no. 1, pp. 169–179, 1989.
16 V. J. Ervin, W. J. Layton, and J. M. Maubach, “Adaptive defect-correction methods for viscous
incompressible flow problems,” SIAM Journal on Numerical Analysis, vol. 37, no. 4, pp. 1165–1185,
2000.
17 V. J. Ervin, J. S. Howell, and H. Lee, “A two-parameter defect-correction method for computation of
steady-state viscoelastic fluid flow,” Applied Mathematics and Computation, vol. 196, no. 2, pp. 818–834,
2008.
18 R. Frank, J. Hertling, and J. P. Monnet, “The application of iterated defect correction to variational
methods for elliptic boundary value problems,” Computing, vol. 30, no. 2, pp. 121–135, 1983.
19 J. L. Gracia and E. O’Riordan, “A defect correction parameter-uniform numerical method for a
singularly perturbed convection diffusion problem in one dimension,” Numerical Algorithms, vol. 41,
no. 4, pp. 359–385, 2006.
20 W. Heinrichs, “Defect correction for convection-dominated flow,” SIAM Journal on Scientific
Computing, vol. 17, no. 5, pp. 1082–1091, 1996.
21 W. Kramer, R. Minero, H. J. H. Clercx, and R. M. M. Mattheij, “A finite volume local defect correction
method for solving the transport equation,” Computers and Fluids, vol. 38, no. 3, pp. 533–543, 2009.
22 O. Koch and E. B. Weinmüller, “Iterated defect correction for the solution of singular initial value
problems,” SIAM Journal on Numerical Analysis, vol. 38, no. 6, pp. 1784–1799, 2001.
23 A. Labovschii, “A defect correction method for the time-dependent Navier-Stokes equations,”
Numerical Methods for Partial Differential Equations, vol. 25, no. 1, pp. 1–25, 2009.
24 W. Layton, H. K. Lee, and J. Peterson, “A defect-correction method for the incompressible NavierStokes equations,” Applied Mathematics and Computation, vol. 129, no. 1, pp. 1–19, 2002.
25 R. Minero, M. J. H. Anthonissen, and R. M. M. Mattheij, “A local defect correction technique for timedependent problems,” Numerical Methods for Partial Differential Equations, vol. 22, no. 1, pp. 128–144,
2006.
26 R. Martin and H. Guillard, “A second order defect correction scheme for unsteady problems,”
Computers and Fluids, vol. 25, no. 1, pp. 9–27, 1996.
27 L. Shen and A. Zhou, “A defect correction scheme for finite element eigenvalues with applications to
quantum chemistry,” SIAM Journal on Scientific Computing, vol. 28, no. 1, pp. 321–338, 2006.
28 H. J. Stetter, “The defect correction principle and discretization methods,” Numerische Mathematik, vol.
29, no. 4, pp. 425–443, 1978.
29 R. A. Adams, Sobolev Spaces, Pure and Applied Mathematics, vol. 6, Academic Press, New York, NY,
USA, 1975.
30 Y. He and J. Li, “Convergence of three iterative methods based on the finite element discretization for
the stationary Navier-Stokes equations,” Computer Methods in Applied Mechanics and Engineering, vol.
198, no. 15-16, pp. 1351–1359, 2009.
31 R. Temam, Navier-Stokes Equations: Theory and Numerical Analysis, vol. 2 of Studies in Mathematics and
Its Applications, North-Holland, Amsterdam, The Netherlands, 3rd edition, 1984.
28
Mathematical Problems in Engineering
32 Y. He, “Two-level method based on finite element and Crank-Nicolson extrapolation for the timedependent Navier-Stokes equations,” SIAM Journal on Numerical Analysis, vol. 41, no. 4, pp. 1263–
1285, 2003.
33 Y. He and W. Sun, “Stability and convergence of the Crank-Nicolson/Adams-Bashforth scheme for
the time-dependent Navier-Stokes equations,” SIAM Journal on Numerical Analysis, vol. 45, no. 2, pp.
837–869, 2007.
34 A. T. Hill and E. Süli, “Approximation of the global attractor for the incompressible Navier-Stokes
equations,” IMA Journal of Numerical Analysis, vol. 20, no. 4, pp. 633–667, 2000.
35 V. Girault and P.-A. Raviart, Finite Element Methods for Navier-Stokes Equations: Theory and Algorithms,
vol. 5 of Springer Series in Computational Mathematics, Springer, Berlin, Germany, 1986.
36 Y. He and K. Li, “Two-level stabilized finite element methods for the steady Navier-Stokes problem,”
Computing, vol. 74, no. 4, pp. 337–351, 2005.
37 Y. He and A. Wang, “A simplified two-level method for the steady Navier-Stokes equations,”
Computer Methods in Applied Mechanics and Engineering, vol. 197, no. 17-18, pp. 1568–1576, 2008.
38 J. Li and Z. Chen, “A new local stabilized nonconforming finite element method for the Stokes
equations,” Computing, vol. 82, no. 2-3, pp. 157–170, 2008.
Advances in
Operations Research
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Advances in
Decision Sciences
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Mathematical Problems
in Engineering
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Journal of
Algebra
Hindawi Publishing Corporation
http://www.hindawi.com
Probability and Statistics
Volume 2014
The Scientific
World Journal
Hindawi Publishing Corporation
http://www.hindawi.com
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
International Journal of
Differential Equations
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Volume 2014
Submit your manuscripts at
http://www.hindawi.com
International Journal of
Advances in
Combinatorics
Hindawi Publishing Corporation
http://www.hindawi.com
Mathematical Physics
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Journal of
Complex Analysis
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
International
Journal of
Mathematics and
Mathematical
Sciences
Journal of
Hindawi Publishing Corporation
http://www.hindawi.com
Stochastic Analysis
Abstract and
Applied Analysis
Hindawi Publishing Corporation
http://www.hindawi.com
Hindawi Publishing Corporation
http://www.hindawi.com
International Journal of
Mathematics
Volume 2014
Volume 2014
Discrete Dynamics in
Nature and Society
Volume 2014
Volume 2014
Journal of
Journal of
Discrete Mathematics
Journal of
Volume 2014
Hindawi Publishing Corporation
http://www.hindawi.com
Applied Mathematics
Journal of
Function Spaces
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Optimization
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014