Signature redacted
advertisement

A METHOD FOR EXPERIMENTALLY DETERMINING ROTATIONAL MOBILITIES
by
STANLEY SIMONV,ATTINGER
B.M.E., Georgia Institute of Technology
(1962)
M.S., Cornell Univeristy
(1964)
SUBMITTED IN PARTIAL FULFILLMENT
OF THE REQUIREMENTS FOR THE
DEGREE OF
MASTER OF SCIENCE
at the
MASSACHUSETTS INSTITUTE OF TECHNOLOGY
August, 1978
Signature redacted
Signature of Author ................... ...
........ r ....... ......
Department of Mechanifl Engine
ing' August 11, 1978
Signature redac ted
Certified By......................
Thes'is Supevisor
-
A
Signature redacted
.......................
Accepted By......... ..
Chairman, Department Committee on Graduate Students
ARCHIVES
OCT 2 7 1 7 8
A METHOD FOR EXPERIMENTALLY DETERMINING ROTATIONAL MOBILITIES
by
Stanley Simon Sattinger
Submitted to the Department of Mechanical Engineering on
August 11, 1978 in partial fulfillment of the requirements
for the Degree of Master of Science.
ABSTRACT
Mobility functions involving rotational velocities and
moment excitations must be determined for the prediction of the responses of certain types of structures in dynamic analyses.
Previous
investigators have approached the difficult task of experimentally
measuring such mobilities with the use of special fixturing attached
to the structures.
It is shown that rotational mobilities of
structures are equivalent to spatial derivatives of their translational mobilities.
The method of finite differences is adapted to
the approximation of these derivatives.
By this approach the
rotational mobilities are derived from sets of conventionally
measured translational mobilities, eliminating the need for special
fixturing.
This method of determining rotational mobilities is demonstrated in a set of experiments on a free-free beam.
Good agreement
is obtained between experimentally and theoretically generated
versions of two rotational velocity/force mobilities.
An experi-
mentally derived rotational velocity/moment mobility is found to
-
- 2
give reasonably good indications of resonances, but exhibits large
amounts of scatter in some frequency bands.
This scatter is attri-
buted to the subtraction of translational mobility quantities which
are nearly equal in magnitude with resultant magnification of minor
Further investigation is recommended
irregularities present in them.
to determine an effective method of smoothing the translational
mobility data before the differencing calculations to eliminate this
scatter.
The finite difference method of determining rotational
mobilities is seen to accommodate considerable variation in the
spacings of the points where the constituent translational mobilities
are measured.
Thesis Supervisor:
Richard H. Lyon
Title:
Professor, Department of Mechanical Engineering
-
- 3
ACKNOWLEDGEMENTS
I wish to thank Professor Richard H. Lyon for his guidance
and suggestions and for his willingness to support me in an area of
study which was of a great deal of personal interest to me.
I am also grateful to Professor Emmett A. Witmer of the
Department of Aeronautics and
Astronautics for his aid in connection
with the method of finite differences.
Many thanks go to fellow
student Charles Gedney for his pointers on the operation of the
Acoustics and Vibration Laboratory minicomputer; to Dr. Richard Dedong
of Cambridge Collaborative, Inc. for sharing some of his vibration
testing experience; and to Mary Toscano for her diligence in the typing
of this thesis.
I owe a debt of gratitude to my employer, Westinghouse
Electric Corporation, for having awarded me a B.G. Lamme Graduate
Scholarship enabling me to pursue a course of study in vibration and
acoustics at MIT.
I am especially thankful to my wife, Jerry, and to our
daughters, Julia and Allison, for the encouragement they gave me and
the many hours of family time they sacrificed throughout the year
of my studies at MIT.
-
- 4
TABLE OF CONTENTS
Page
ABSTRACT........................................................
2
ACKNOWLEDGEMENTS................................................
4
TABLE OF CONTENTS...............................................
5
LIST OF FIGURES.................................................
7
NOMENCLATURE.................................................... 10
II.
III.
IV.
INTRODUCTION............................................. 14
A.
Background........................................... 14
B.
Scope................................................ 17
DERIVING ROTATIONAL MOBILITIES FROM TRANSLATIONAL
MOBILITIES............................................... 18
A.
Rotational Velocity/Force Mobility................... 18
B.
Translational Velocity/Moment Mobility............... 20
C.
Rotational Velocity/Moment Mobility.................. 21
D.
Summary of Derivative Relationships.................. 22
E.
Implementation of Finite Difference Method........... 23
EXPERIMENTAL MOBILITY MEASUREMENTS ON A FREE-FREE BEAM... 28
A.
Test Specimen and Test Equipment..................... 28
B.
Test Procedure....................................... 30
C.
Measured Vs. Theoretical Translational Mobilities.... 32
D.
Experimentally Derived Vs. Theoretical Rotational
Mobilities...........................................
CONCLUSIONS..............................................
- 5
-
I.
37
41
TABLE OF CONTENTS (CONTINUED)
Page
..00.
.. . ...
REFERENCES..
. . ...
..
. ...
..
.....
42
.
FIGURES..... ............................
....
69
APPENDIX A:
THEORETICAL MOBILITIES OF A FREE-FREE BEAM.
71
APPENDIX B:
COMPUTER PROGRAM THEOR..... ................
81
APPENDIX C:
COMPUTER PROGRAM TRANS..... ................
85
APPENDIX D:
COMPUTER PROGRAM ROTAT..... ................
87
-
- 6
LIST OF FIGURES
No.
Page
Transfer Mobilities Involving Various Combinations
of Translational and Rotational Effects..............
42
Relationship of Rotational Velocity/Force Mobility
to Translational Mobility at a Single Frequency......
43
Relationship of Translational Velocity/Moment
Mobility to Translational Mobility at a Single
Frequency............................................
44
3,1
Test Beam Details.....................
45
3.2
Matrix of Desired Beam Mobilities.....
46
3.3
Test System Schematic Diagram......... ...............
47
3.4
Test Beam Translational Mobility 4,1 Before and
After Data Substitution.............. ...............
48
Test Beam Experimental and Theoretical Translational
Mobility 1 ,2 . ..
'
''
'. . .. . . . .
. '
..
49
Test Beam Experimental and Theoretical Transl1'ational
Mobilityik3 ,.' . '. . . . . ' . . . . . . . . . .
50
3.7
Test Beam Experimental and Theoretical Translational
Mobility 2,2'''''........
'......
51
3.8
Test Beam Experimental and Theoretical Trans1'ati'onal
Mobility 4 3 ,2 '''
.. . '''. .. . .. . . ' .. .
52
3.9
Test Beam Experimental and Theoretical Translational
Mobility 4 ,2. . . '' . .. . ''
.
. . .. . .. . .
53
3,10
Test Beam Experimental and Theoretical Translational
Transl1ati onal
Mobility'P3 3. . '. . . . ''' . '' . '. . '.
54
Test Beam Experimental and Theoretical
Mobility 44,3".....'...'.''..'..
55
1.1
2.1
2.2
3.5
'
'
3.6
- 7
-
3.11
LIST OF FIGURES (CONTINUED)
No.
Page
3.12
Test Beam Experimental and Theoretical
Translational Mobility p4 ,4.... ...... ............ .... 56
3.13
Test Beam Experimental and Theoretical Rotational
Velocity/Force Mobility Y
F(W) .....................
0BFA
3.14
Test Beam Experimental and Theoretical Rotational
Velocity/Force Mobility Y. F(()
3.15
8..................
Test Beam Experimental and Theoretical Rotational
Velocity/Moment Mobility Y
(W)....................
OBMB
3.16
3.17
Constituent Terms of Derived Experimental Mobility
Y
(,) Over a Frequency Band of Large Scatter:
0B MB
Real Components......................................
60
Constituent Terms of Derived Experimental Mobility
Y 0 M () Over a Frequency Band of Large Scatter:
Imaginary Components........................ ......... 61
3.18
Quadrature Components of the Derived Experimental
Mobility YBMB() Over the Frequency Band of
Figures 3.16 and 3.17................................62
3.19
Rotational Velocity/Force Mobility Y. F (W) Derived
by Differencing Theoretical Translational
Mobilities: An = AE = .044m.........................
Rotational Velocity/Moment Mobility Y0 BMB ()
Derived
by Differencing Theoretical Translational
Mobilities: An = AC = .044m............. ......... ..
- 8
-
3.20
63
64
LIST OF FIGURES (CONTINUED)
Page
No.
3.21
Rotational Velocity/Force Mobility Y 0 FB
Derived by Differencing Theoretical Translational
Mobilities: An = A = .088m........................65
3.22
Rotational Velocity/Moment Mobility Y MB
Derived by Differencing Theoretical Translational
Mobilities:
3,23
An = Ac = .088m.........................
Rotational Velocity/Force Mobility Y
66
F (W)
Derived by Differencing Theoretical Translational
Mobilities: An = AC = .022m........................67
(
Rotational Velocity/Moment Mobility Y0BMB
Derived by Differencing Theoretical Translational
Mobilities: An = A = .022m. .......................
- 9
-
3.24
68
NOMENCLATURE
A
Uniform beam cross-section area; also the complex
amplitude of acceleration
Constant coefficient of the ith term in the
expression for W(x)
4.
Arbitrary multiplier of the rth eigenfunction of a
free vibration problem
Modulus of elasticity of beam material
Base of natural logarithms
)
(no;
Complex amplitude of sinusoidally varying force
on a structure.
applied at position
Complex amplitude of the sinusoidally varying
force f(t)
W6
Cyclic frequency, Hz
f
Concentrated force applied at Point A on a structure
Distributed loading applied to a beam, including
damping forces
f(X)
fX (X
Distributed loading applied to beam, exclusive of
damping forces
Cross spectral density of stationary random
acceleration and random force (complex function
of cyclic frequency)
Power spectral density of stationary random force
(real function of cyclic frequency)
Uniform beam cross-section area moment of inertia
Length of beam
))
Complex amplitude of sinusoidally varying moment
on a structure
appli ed at position g
- 10
-
-I
NOMENCLATURE (Continued)
Complex amplitude of the sinusoidally varying
moment
Mr
Modal mass of the rth mode of vibration
/?7
Total mass of beam
Concentrated moment applied at Point A on a
structure
Mode number at which infinite series of modal
mobilities is truncated
Complex amplitude of the sinusoidally varying
force l(t)
One member of a force couple equivalent to
moment /7nA(t)
Pr
The rth eigenvalue of a free vibration problem
Modal force of the rth mode of vibration
t)
rZ
Modal force of the rth mode exclusive of damping
forces
Generalized coordinate or generalized displacement
of the rth mode of vibration
Time
W(X)
Complex amplitude of the sinusoidally varying
displacement W(X)
The rth eigenfunction of a free vibration problem
4(x)
-
X2
Complex amplitude of sinusoidally varying translational
velocity measured at position 1 on a structure
Complex amplitude of sinusoidally varying translational velocity measured at Point A on a
structure
NOMENCLATURE (Continued)
w(Xjt)
X74(w)
F
".WA
~AWX
Transverse displacement at location X. on a beam
Displacement measured at Point A on a structure
Complex amplitude of the sinusoidally varying
generalized displacement
(t
Coordinate of axial position on a structure
Translational velocity/force mobility:
measured at A, excitation applied at B
Translational velocity/moment mobility:
measured at A, excitation applied at B
Rotational velocity/force mobility:
at A, excitation applied at B
velocity
velocity
velocity measured
Rotational velocity/moment mobility: velocity
measured at A, excitation applied at B
Coordinate of transverse position on a structure
Dirac delta function of position coordinate x
6
'A
Spacing of the members p(t)
of a force couple
Equivalent viscous damping ratio of the rth mode of
vibration
Axial coordinate of point of velocity measurement on a
structure
e(y)
Spacing between adjacent velocity measurement locations
Complex amplitude of sinusoidally varying rotational
velocity measured at position 1 on a structure
Complex amplitude of sinusoidally varying rotational
velocity at Point A on a structure
Rotation occurring at Point A on a structure
Axial coordinate of point of excitation on a structure
-
- 12
NOMENCLATURE (Continued)
-\ $Spacing
between adjacent excitation points on a
structure
Mass density of beam material
Mobility phase angle
AF
4X X)
Acceleration/force cross spectral density phase
angle (function of cyclic frequency)
The portion of the rth eigenfunction WrX)exclusive of
the multiplerDr
One of a set of translational velocity/force
mobilities from which one or more rotational
motilities will be derived
4L)
Angular frequency, rad/sec
OJM
A particular value of frequency
-
- 13
I.
INTRODUCTION
A.
Background
The application of mobility functions* and their inverse
quantities, mechanical impedances,to practical problems in vibration,
shock, and acoustics has been treated extensively in the literature.
Mobility and impedance concepts are readily adaptable to dynamic
response predictions for assemblages of two or more component
structures.
A mobility function is a transfer function relating the
complex amplitude of motion at some point on a structure in response
to the complex amplitude of an excitation force applied at any point
on the same structure.
In the most commonly discussed type of
mobility the response motion is a translational component of velocity,
and the excitation is a translational force as illustrated in the
transfer mobility example of Figures 1.1(a).
However, the concept
of mobility can be extended to rotational velocities and moment
excitations as shown in the examples of Figures 1.1(b) through 1.1(d).
A matrix relationship involving the transfer mobilities thus defined
between the two points is shown in Figure 1.1(e).
The matrix formulation shown in Figure 1.1(e) can be
*
specialized to the case where the response measurement point, B,
Also denoted as admittances or receptances.
-
- 14
is coincident with the excitation point, A, i.e., each matrix element
is a driving point mobility; or it
can be generalized to include the
existence of motions and excitations at both points.
In the latter
instance the second order mobility matrix shown would be expanded
to the fourth order.
Generalizing still further, the transfer
mobility matrix shown in Figure 1.1(e) could be extended to the six
possible senses of motion and applied excitation in a three-dimensional
application, attaining order 6.
The mobility matrix would be enlarged
still further as additional locations for responses and excitations
would be considered.
In many instances the mobility or impedance quantities
are determined experimentally.
In cases such as the applications of
impedance methods to vibration testing described in References (1)
and (2), the motions and forces involved are limited to translational
effects directed along a single axis.
In the studies described in
References (3), (4), and (5), the applications are broadened to treat
the interconnection of components which may sustain rotational and
translational components of motion, but are assumed to have only
translational interaction effects.
For an assemblage to be
accurately modeled by such an approach, there must be negligibly
small moment reactions among components at each interface in the
actual system by virtue of joint configuration, symmetry, or other
factors.
-
- 15
Cantilevered assemblages can be readily conceived wherein
the most important interactions are rotational; in such cases there
must be compatibility of rotations at connections, and moment
reactions are far more significant than force interactions.
Ex-
tensions of mobility and impedance methods to response predictions in
these cases have been hampered by difficulties in experimentally
measuring the rotational mobilities.
Whereas the measurement of
translational velocities and forces is presently a routine process,
apparatus for the measurement of rotational velocities and moments in
structural dynamics applications is not commercially available.
Noiseux and Meyer (6) suggest that the lack of a general measurement
technique has retarded the application
of mobility concepts and in
some cases has distorted the applications by mandating the use of
what can be measured rather than what should be measured.
Explorations of methods for the measurement of moment
excitations and rotation responses are described in References (7),
(8) and (9).
In each of these studies a special fixture has been
attached to the structure being measured, and conventional linear
force gages and accelerometers have been, in turn, mounted at
By appropriate algebraic operations
various locations on the fixture.
on the data gathered in each of the various measurement configurations,
rotational mobilities have been obtained with varying degrees of
success.
Corrections for the dynamic influences of the fixturing
- 16
-
have been required in each case.
B.
Scope
The objective of this thesis is to improvise and demon-
strate a method of generating experimental rotational mobility
functions using conventional measurement techniques without a
requirement for the use of special fixturing.
The approach taken
has been to represent mobilities involving rotational velocities
and moment excitations as spatial derivatives of conventional
translational mobilities; the derivatives are approximated as
finite difference sums of sets of these translational mobilities.
In Section II, the theoretical basis and calculational methods
for these representations are developed.
Section III describes the
experimental and theoretical determination of mobilities of a
free-free beam demonstrating these methods.
the conclusions drawn.
-
- 17
Section IV presents
II.
A.
DERIVING ROTATIONAL MOBILITIES FROM TRANSLATIONAL MOBILITIES
Rotational Velocity/Force Mobility
Figure 2.1(a) depicts a segment of a structure which is
being driven by a sinusoidal translational force applied to Point A
and in which the resultant sinusoidal translational velocity is being
measured at Point B.
Considering momentarily that the excitation is at
a particular frequency&4)M, the value of the translational mobility
at that frequency is the complex quantity
4)/zM
M).
Now
suppose that the velocity measurement is made in turn at each point
of a set of points adjacent to Point B with the excitation maintained
at Point A as shown in Figure 2.1(b).
ratios
coordinate,
0;Je40)
The resulting complex amplitude
could be plotted as functions of the position
, of the measuring point as shown in Figure 2.1(c).
The real and imaginary mobility data, if carefully measured, would be
found to lie on smooth curves by virtue of the continuity of the wave
fields comprising the vibration of the structure..
Tangent lines
could be drawn to these curves at the coordinate X
of Point B.
The slopes of these tangents would have the following significance.
The instantaneous angular displacement of the structure at a
relative to its rest position would be given by:
0w
J
- 18
-
location
C/ d:ow
iJL4~
(2.1)
7
But, because the excitation is sinusoidal, this angular velocity
could be expressed as
(2.2)
)
=
By combining Eq. (2.2) and the relation
v
with Eq. (2.1), it is found that
d-) = 0'~4
141tIZ),
(2.3)
from which is formed the ratio of complex amplitudes
k41
t
allC' k/s-'(4
e
)
M4
,(a4)
1[i~dW)~l)
(2.4)
If the indicated measurements and calculations are performed at
intervals over a band of driving frequencies,60) , of interest,
the rotational velocity/force mobility function is thus derived from
the translational mobility symbolically as
(2,5)
I'&.SF
A
-19
-
=t
The time rate of change of this slope would be given by:
B.
Translational Velocity/Moment Mobility
In Figure 2.2(a) the structure is again shown with
translational excitation and response vectors at Points A and B,
respectively.
Again with the excitation frequency set at
AIM
suppose that the excitation force is applied in turn at each of a
set of points adjacent to
as shown in Figure 2.2(b).
A
4M
The resulting complex amplitude ratios
could be plotted as functions of the position
;6
coordinate,
A with responses measured at Point B
,
of the excitation point as shown in Figure 2.2(c).
The real and imaginary mobility components would again be found to
lie on smooth curves to which tangent lines could be drawn at the
coordinate
X
of Point A.
The significance of the tangent slopes to
these curves is explained as follows.
With reference to Figure 2.2(d) it is seen that an
instantaneous moment applied to the structure at Point A could be
equivalently represented as a pair of equal and opposite parallel
forces separated a small distance, E .
The response of the
structure at Point B to a sinusoidally varying moment at Point A
could then be expressed as follows:
F( 2
20 -(26
(2o
T hen
WB 20,
Av
B
7ra),44;
ci
=
49
Rrakm)
kme
k(cdM)
A4 A @
4)M)
7~FtWA4~)
I
(2.7)
from which is formed the ratio of complex amplitudes
-
d
W)
)
A4A (
Cc/T~T4~a60)
0
.;4*ZmfkIMW)7
(2.8)
If this ratio is evaluated over a band of driving frequencies, 4)
of interest, the translational velocity/moment mobility function is
thus derived from the translational mobility symbolically as
ci
YjF (a;
(2.9)
)
(4A
C.
Rotational Velocity/Moment Mobility
The structure will again be envisioned as being excited by
a sinusoidal translational force of frequency
4OM at Point A.
If the
location coordinate 5 of the force application point is then made
to vary about
X
, the resultant derivative of translational
mobility relates the complex amplitude of translational velocity
- 21
-
at Point B to the complex amplitude of applied moment at Point A in
accordance with Eq. (2.7). If Eq. (2.3) is written
for the case q=X
and is combined with Eq. (2.7), the result
O/ZF 4
YA(WA44)
&19m; 5)
(2.10)
is obtained.
If this ratio is evaluated over a band of driving
frequencies of interest, the rotational velocity/moment mobility
function is thus derived from the translational mobility symbolically
as:
GB(A
D.
)
eD (Z
~~2g4/)
(2.11)
Summary of Derivative Relationships
The mobility matrix relating the translational and
rotational velocity amplitudes at the response measuring Point B to
the amplitudes of force and moment at the excitation Point A on a
structure was shown in Figure 1.1(e).
In accordance with Eqs. (2.5),
(2.9) and (2.11) each element of this mobility matrix is a function
which can be re-expressed in terms of the translational velocity/
force mobility function, yielding the following:
-
- 22
<
AA(a14?
-
F~~
~~~
Y4(4~
C~f~
(2.12)
or, using more compact notation,
YWB
0
(2.13)
It is emphasized that each element in the mobility matrix represents
a function of angular frequency ) defined over some band of interest.
E.
Implementation by Finite Difference Method
The calculation of spatial derivatives of translational
velocity/force mobilities is the essence of the above described
approach to determining rotational mobilities.
For application
of this approach to the experimental determination of mobilities,
these derivatives must be approximated from conventional mobility
measurements made at a limited number of discrete locations on a
structure.
The method of finite differences,
(11), is used for this purpose.
23
-
-
References (10) and
f
Let the symbol
denote a translational velocity/force
mobility function to identify it
as
one of a set of conventional
mobilities from which one or more rotational mobilities will be
derived.
These conventional mobilities will be determined with re-
sponse velocity measurements made at locations ..
spaced
-
z
apart, and with force excitations applied at locations
spacedAJ
-/)$/.....
Thus the notation
apart.
will represent the mobility function V
P),
If ( were a function of only the single spatial coordinate
, each of the following expressions would approximate the continuous
ordinary first derivative of that function, correct to within truncation errors of the order
of
Central Difference:
C&&
_
;.
_
-.._
_
(2.14)
Forward Difference::-/
Backward Difference:
2
The choice of the approximation which would be used from among these
three would depend on whether the location
where the derivative is
desired happens to be an inboard location, and if an end location,
whether at the positive end or the negative end of the7 interval.
For the mobility function O(a-;A ) )in which two spatial coordinates
are involved, the first partial derivative approximations have
-
similar form to the ordinary derivative approximation:
- 24
Central Difference:
07I-v
fiml - &,0?
2417
_5M
Cao~j
JZA
=L
5-
Forward Difference:
Backward Difference:
-- "
___________
-4oi2/,
43
7
-
-%--
42A~
The latter expressions are directly usable in evaluating the rotational
velocity/force mobility and the translational velocity/moment mobility
as indicated in Eqs. (2.12) and (2.13) given that
or
n
m
and 15= 4)
p
The mixed second partial derivative can be approximated by
one of the following expressions:
Central Difference:
-
2AZ1/
2?z
Forward Difference:
+3~fr
/--/F
J2VI
nQ
-
25-
077-
#-Al
(2.16)
i~A4
'
Backward Difference:
cont'd)
The above central difference expression is usable for evaluating any
rotational velocity/moment mobility in which the hypothetical moment
excitation is applied at a point inboard of the ends and the rotational
velocity response is at the same point or any other inboard point.
The forward difference expression applies only to the case in which
both 1
and
5
coincide with the negative ends of their ranges;
i.e., the hypothetical moment excitation is applied and the rotational
velocity response is measured at the left end of the structure.
Similarly, the backward difference expression applies only in the
case where both the hypothetical moment excitation and the rotational
velocity response locations are at the right (positive) end of the
structure.
Such end-located rotational mobilities would be of main
importance in analyzing the dynamic response of cantilevered structures.
However, in instances where the moment excitation would be applied at
an end point and the rotational velocity response would be measured at
some other location,
or vice-versa, none of the above difference
Reference (11) contains other
expressions would be applicable.
finite difference formulations which would apply in these instances.
In summary, the evaluation of a particular rotational
26
-
-
mobility using the above finite difference approximation methods
requires the prior determination of between two and nine conventional
translational mobilities, the quantity depending on the location and
type of rotational mobility desired.
For driving point rotational
velocity/moment mobilities the number of translational mobilities
needed may be cut almost in half by resort to the use of the
,
'
reciprocal theorem for dynamic loads, Reference (12); because
as a consequency of this theorem, either of these mobilities may be
substituted for the other.
It is further noted that several dif-
ferent rotational mobilities can be evaluated using a common set of
translational mobilities.
The selection of response measurement and excitation
location spacingsl 7 andA f , must achieve a balance between
resolution and proper approximation of derivatives across the number
of natural modes of vibration encompassed in the band of frequencies.
Some analytically or experimentally obtained knowledge of mode shapes
is desirable for use in the determination of the point spacings.
The
results of Section III.D demonstrate that this balance is achievable
with latitude in the selectionat least in cases where a limited
number of resonances are included in the frequency band.
-
- 27
III.
A.
EXPERIMENTAL MOBILITY MEASUREMENTS ON A FREE-FREE BEAM
Test Specimen and Test Equipment
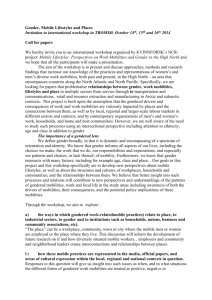
Figure 3.1 depicts the beam which was prepared from cold
rolled steel rectangular bar stock for experiments to demonstrate
the previously described approach to obtaining rotational mobilities.
Excitation point and motion monitoring point locations were established for experimental measurements of all the conventional translational mobilities needed to generate the rotational mobilities identified
in Figure 3.2 by the methods of backward differences.
The mobilities
included therein would be among those required to predict the translational motion at Point A due to cantilever attachment of the beam
to a moving foundation or other component at Point B.
The particular set of beam cross section dimensions was
chosen such that the off-axis (stiff direction) natural vibration
frequencies would not coincide with the drive direction (flexible
direction) natural frequencies.
The tapped holes shown in Figure 3.1
were added to enable stud attachment of an impedance head for force
measurements at each drive point location in turn.
Because most of
the required translational mobilities were to be transfer
mobilities, all motion measurements were made by attaching the
accelerometer to the opposite side of the beam from the impedance
head using beeswax.
Accurate placement of the accelerometer was
facilitated by lines scribed on the surface coincident with the
-
- 28
driving stud hole centers.
It is seen in Figure 3.1 that the outer-
most drive points were located as close to the beam ends as possible
with assurance of proper seating of the instrumentation at these end
locations.
The .044m spacing of the driving and measuring points
at End B was established by first sketching the mode shape of the
expected highest resonance within the planned test frequency band of
0-2000 Hz.
The three driving points were then spaced at the widest
distance where the backward difference method could be expected to
approximate the slope of this mode shape reasonably well.
This
spacing was chosen as wide as possible to provide resolution for
accuracy in the approximation of slopes at the frequency of the
lowest resonance.
The mobility tests were conducted using broad band
The force and acceleration signals
stationary random excitation.
were recorded and processed by a minicomputer using the fast Fourier
transform coherence/cross spectral density program COHER previously
developed for the Acoustics and Vibration Laboratory in conjunction
with the Reference (5)
ScD dissertation.
The overall test system
with identification of the test equipment used is shown in Figure 3.3.
The test beam, which weighed 5.64 kg, was suspended
yertically from one end by means of elastic bands and was driven
horizontally to effect the intended free-free boundary conditions.
which
The horizontally oriented shaker,
was capable of generating
a maximum force amplitude of about 25 nt, was connected to the stud29
-
-
mounted impedance head by means of a .05m long by .002m diameter
shaft capble of accommodating minor misalignments between shaker
and beam.
The beeswax-mounted accelerometer was of 2 grams mass,
and the total mass of the impedance head was 60 grams.
B.
Test Procedure
Calibration of the accelerometer signal channel was
performed by temporarily mounting the accelerometer on a General
Radio Model 1557A calibrator.
Subsequently, the force signal
channel was calibrated by connecting a rigid disk of known mass to
the impedance head and exciting it sinusoidally; the calibrated
accelerometer signal and the known mass were used to establish the
actual force amplitude represented by a given force signal.
calibration values obtained were found to be close to(
The
the trans-
The proper functioning of the entire
ducer manufacturers' ratings,
test system was later verified by driving the rigid disk with
random force input; the mobility data generated by the system were
matched very closely by the theoretical mobility of a pure mass of
the same value.
To maximize the dynamic range of the measurement system,
it was necessary to make the frequency spectrum of both channels
simultaneously as flat as possible across the 0-2000 Hz band of
interest,
The test beam was instrumented at typical driving and
response locations, and the signal spectra were monitored in real
30
-
-
time using the spectrum analyzer.
It was found that adequate flatness
could be obtained with the use of one signal generator output bandpass
A 63 Hz high pass corner frequency
filter as shown in Figure 3.3.
setting and a 1600 Hz low pass corner frequency setting were used for
this filter throughout the beam mobility testing.
These settings
provided the required flatness of signal spectra from 0 to 2000 Hz
while providing desired roll-off in driving force above 2000 Hz and
precluding large-amplitude,low-frequency rigid body motions of the
beam.
Prior to the start of each mobility data acquisition run
the signal channel gains were adjusted until the signal levels,
monitored on the oscilloscope, seldom exceeded the 5 volt maximum
input level of the analog to digital converters.
The channel gain
values and transducer sensitivity values were then specified as input data to the computer along with the desired number of averages
(400. for each run).
Also specified was the maximum frequency value
(one-half the sampling rate), which was
2560 Hz for all runs.
The
force and acceleration signal channel bandpass filters were
accordingly set at corner frequencies of 2 Hz (high pass) and
2000 Hz (low pass) for both channels.
The latter setting was con-
sistent with the Reference (5) recommendation that the high frequency roll-off point be set at 0.4 times the sampling rate to
-
31
-
eliminate aliasing effects,
C.
Measured Vs. Theoretical Translational Mobilities
For each mobility test run, the minicomputer calculated
power spectral densities and cross spectral densities of the force
and acceleration signals along with their relative phase and coherence
These outputs were generated at discrete frequencies spaced
values.
10 Hz apart over a band extending from 10 Hz to 2000 Hz and were
converted into translational mobilities as explained below.
In the definition of a translational mobility as a transfer
function relating sinusoidal force and velocity quantities, the
acceleration corresponding to the velocity W,
= 44C)
L)
= Aew
irit
is given as
(3,
)
W
*
Then the translational mobility is related to the acceleration/force
, and the power spectral density of the
cross spectral density,G-force,
G,
_ T
in accordance with
i_
/ A
/
-
--
-
A
A
(3.2)
Separating these complex quantities into their magnitude and phase
components, we obtain
/ -.--.- (3.3)
=..-.-
32
-
-
w here
:XAF.
Ais the phase angle of the complex cross spectral density
The, magnitude portion of Eq.(3.3)can be re-expressed in
terms of the frequency and spectral density quantities in the form
0 utput
by the COHER program:
(3.4)
/64!),
F
(1/6
which yields
2O/oy4
/o/
//
1 0 1A A
Fo
-D/T7
(3.5)
The phase portion of (3.3) is simply
5
=
-
Frequently the force and acceleration signals in mobility
measurements are corrected for the mass and flexibility effects of
the portion of the impedance head below the force gage.
Such cor-
rections are described in Reference (5), but the corrections therein
pertain to driving point mobilities only.
In transfer mobility
measurements these effects cannot be determined with the test
system described, as the measured accelerations are different from
those sustained by the impedance head.
Because the bulk of
the
mobilities measured were transfer mobilities, no impedance head
- 33
-
490
(3.6)
a
corrections were made in any of the runs.
The computer program TRANS, listed in Appendix C,.was
written to convert the spectral density output data from COHER into
translational mobilities per Eqs.(3.5) and (3.6)
and to create plots
and store the results in quadrature form on disk for later manipulation.
Data input to the TRANS program is via punched cards.
A separate pro-
gram, THEOR, listed in Appendix B,was written to generate theoretical
translational and rotational mobility functions for Bernoulli-Euler
beams and to store them on disk in magnitude and phase form for use
in comparison with the experimental results.
The derivation of the
equations programmed in THEOR is presented in Appendix A.
By virtue of the reciprocal theorem for dynamic loads,
Reference (12), mobility matrices such. as given in Figure 3.2 are
symmetric.
Thus all elements of the matrix shown would be established
if only the upper or lower triangular portion were evaluated.
If
arbitrarily the lower triangular portion is chosen to be evaluated,
the translational mobilities needed to establish this matrix are
as follows:
()
A
Y
(4t))3)1)BA2)1
4:
-223
- 34
-
Y
Z2
A further consequence of the reciprocal theorem is the symmetry of translational mobilities, i.e.,
.
Also, by
Combining these com-
geometric symmetry it is seen that
monalities, the entire nine-element mobility matrix shown in Figure 3.2
would be established by measurement of the following nine translational
mobilities or their reciprocals:
Theoretical and experimental versions of these translational
mobilities were generated as explained above.
A tendency toward
erratic results was observed in the experimental magnitude data in
regions of resonances.
It was found that these erratic results occur-
red at frequencies where the coherence values fell to low levels
(less than .50).
The low coherences were attributable to the force
signal spectra having decayed to the level of the background noise
floor at the resonances; this
tendency is more pronounced with items
having low damping such as the test beam.
In an attempt to obtain
the best possible translational mobility data for subsequent use in
deriyjng rotational mobilities, replacenent magnitude data for the
more noticeably erratic regions were obtained using sinusoidal excitation,
A sine wave generator was substituted for the random
signal generator and bandpass filter, and the acceleration and force
signal peak values were read from the oscilloscope without the use
-
- 35
No revised phase measurements were made.
of the computer.
A typical
the substituted-data version of the same mobility is shown for
in Figure 3.4.
/
comparison of the original random excitation mboility results with
Magnitude data substitutions- were made in the experi-
mental mobilities as follows:
Frequency Range(s) of Substitution
Mobility
/" 2
None
330-530, 770-960
300-530 , 750-950
None
None
None
130-220, 380-520
93
330-520
430-540, 790-960
The substitutions were made over wide enough bands of frequencies
so that the sinusoidally generated data merged with the randomexcitation data with minimal discontinuities.
Figures 3.5 through 3.12 show plots of the substituted
data versions of the remaining experimental translational mobilities.
All theoretical mobility plots are comprised of straight line segments connecting data points at 10 Hz intervals
and are calculated
based on an assumed equivalent viscous damping ratio of .005 for
In general, the agreement between the experi-
36
-
each elastic mode.
mental and the theoretical results is good up to the third
resonance (approximately 850 Hz); however, there are noticeable
discrepancies in frequency at the fourth resonance.
The reason for
the discrepancies is not clear; possibly the impedance head
rotational inertia became significant in this higher mode, where
rotational kinetic energy acquired its greatest proportion of the
total kinetic energy.
It was concluded that the portions of the experimental
data below 1000 Hz could be considered "good" data for generating
rotational mobilities, but that satisfactory results could not be
expected above 1000 Hz,
D.
Experimentally Derived Vs. Theoretical Rotational Mobilities
The computer program ROTAT listed in Appendix D was
written to perform the backward difference calculations indicated
in Eqs. (2.15) and (2.16), which generate right-end rotational mobilities
such as those indicated in Figure 3.2 from an appropriately chosen
set of translational mobilities,
The translational mobilities are
read by the computer from storage on disk in quadrature component
form over a set of discrete frequencies.
The output rotational
mobilities are plotted in magnitude and phase form and can be stored
on disk for subsequent manipulation if desired.
The previously discussed experimental translational
mobilities were read by this program for calculation of the test beam
37
-
-
rotational mobilities
F,
and Y
14.
The results are shown plotted in Figures 3.13, 3.14 and 3.15,
respectively, along with corresponding theoretical mobility functions
generated with the use of the previously mentioned computer program
THEOR.
Again a damping ratio value of .005 was used for each
elastic mode in calculating the theoretical mobilities.
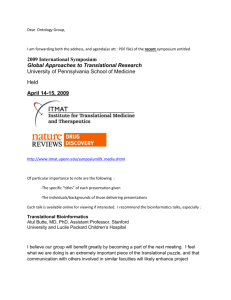
The agreement between the experimental and theoretical
versions of the rotational velocity/force mobilities
and
over the previously cited 0-1000 Hz band of "good"
translational mobility data is reasonably close.
Although the experi-
mentally derived rotational velocity/moment mobility
gives, reasonably clear and accurate, indications of resonances, it
exhibits a great deal of scatter in both magnitude and phase in some
regions,
This
latter mobility function and its constituent
translational mobilities were examined closely in the frequency band
230 to 300 Hz, where there was a marked degree of scatter
in both
the magnitude and phase plots,
The translational mobility data in this band were generated
entirely by random excitation with no substitution of sinusoidally
generated data.
The scatter in the derived mobility data in this band
seems at first glance to be inconsistent with the smoothness of the
translational nobility data, Figures 3.4 through 3.12, within the
same band.
The quadrature components of the constituent trans-
-
lational mobilities over this band are plotted on expanded scales in
- 38
Figures 3.16 and 3.17, and the quadrature components of the resultant
rotational mobility are shown in Figure 3.18.
It is seen that the
translational mobilities had been nearly purely imaginary, but the
algebraic summation of these numbers gave a resultant imaginary
component which was much smaller than most of the individual constituents, magnifying the minor degrees of irregularity present in
them.
The scatter in the real components of the constituents,
Figure 3.16, had been present due to minor deviations in measured
The scatter in the quadrature com-
phase from the ideal value, -90'.
ponents of the resultant mobility Y,
Figure 3.18,is the
source of the scatter in the magnitude and phase noted in Figure 3.15.
This examination of scatter in the Y45t 4W
mobility shows that the stability of derived rotational mobilities,
would be enhanced by performing smoothing operations on the translational mobility data before the differencing calculations.
An
effective approach to smoothing might be to fit analytical mobility
expressions to a number of data points in each experimental mobility
as described in References (4) and (9),
Examples of the resultant
rotational mobilities which can be derived by the differencing method
from translational mobilities which are smooth and accurate are shown
in Figures 3,19 and 3,20, The THEOR program was temporarily modified
to establish quadrature versions of the theoretical translational
mobiliti es of Figures 3.4 through 3.12 on disk files, and the
-
- 39
mobility data points in
.g8A4)
and
3F (4)
Figures 3.19 and 3.20 were generated by having the ROTAT program
process these files in the same manner as it had processed the experimental data.
With the exception of small deviations in anti-
resonant frequencies seen in Figure 3.20, the agreement between the
theoretical and derived mobilities is excellent.
Figures 3.21 through 3.24 show
Y49
f
C
)
and
rotational mobili'ty results similarly derived from
theoretical translational mobilities which were calculated at
locations corresponding toA8.038MandA
2
.02z%/
or twice and one-half the spacing of the experimental measurement
points.
The results for the wide spacing, Figures 3.21 and 3,22,
show additional degrees of the antiresonant frequency deviation
noted in Figure 3.20, but the more important matching of resonant
frequencies is again achieved.
The results for close spacing,
Figures 3.23 and 3.24, show excellent agreement throughout,
Thus
the latitude of the differencing method of deriving rotational
mobilities in accommodating variation in measurement location
- 40
-
spacings is demonstrated.
IV.
CONCLUSIONS
Rotational mobilities of structures are equivalent to
spatial derivatives of their translational mobilities and can be
determined experimentally by finite difference approximations involving
sets of measured translational mobilities.
Good agreement was ob-
tained between experimentally and theoretically generated versions of
two rotational velocity/force mobilities of a free-free beam.
An
experimentally derived rotational velocity/moment mobility gave
reasonably good indications of resonance, but exhibited large amounts
of scatter in some frequency bands.
This scatter was found to result
from the subtraction of nearly equal translational mobility quantities
in the differencing operation, magnifying minor irregularities present
in them.
It is believed that this scatter in the rotational
mobilities can be eliminated by smoothing operations on the translational mobility data such as curve fitting before the differencing
calculations.
However, further investigation should be conducted to
determine an efficient algorithm for performing the smoothing and to
evaluate its effectiveness in reproducing the magnitudes and trends
that characterize the experimental data.
It has been shown that the differencing method of determining rotati onal mobilities can accommodate considerable variation
in the spacings of the points where the constituent translational
- 41
-
mobilities are measured,
Excitation:
B
A
4w
Response:
Mobility:
(a)
r4wA
Y1I-,F Y(a)
Translational Velocity/Force Mobility
Excitation:
Response:
(
Mobility:
(b)
Rotational Velocity/Force Mobility
7A(t)
Excitation:
An.-
Response:
Mobility:
(c)
72~
BA AW
Translational Velocity/Moment Mobility
4() ei
Excitation:
AB
Response:
e w
Mobility:
(d)
Rotational Velocity/Moment Mobility
FT,4o)
8,A50
=
C9 8(w~)
j14
Yc7
V, A
Matrix Equation Involving Combined Mobilities
FIGURE 1.1:
Transfer Mobilities Involving Various Combinations
of Translational and Rotational Effects
- 42
-
(e)
Kaidoj)1JAI
Exci tation
tiw
(a)
Response
fA(t)
()
,
4
Fixed Response Measurement Location
Excitation
2 W
Re
nse
~~7(
i()M)
e ia)44t
WM)
2
(b)
Mo. '4C
4 4UM
ara)
( 44 ; 1 )a
Varying Response Measurement Location.
Imaginary Component
,4
Real Component
X8
Plot of Resultant Complex Amplitude Ratios
FIGURE 2.1:
Relationship of Rotational Velocity/Force Mobility
to Translational Mobility at a Single Frequency
- 43
-
(c)
f4
1'
Excitation
~2W
)
Response
)
A
I
(a)
0
A)
e 64f-u
Xz
I
Fixed Excitation Location
Excitation
iYt)
)
A
Response
w ZZ)
NI)e
0
I
)
(b)
24-ICA
Varying Excitation Location
K%
N
I i i
(c)
Plot of Resultant Comolex
~?
1
Real Component
Imaginary Component
I
Amolitude Ratios
A
/19?
A
Substitution of Equivalent Force Pair for Moment
FIGURE 2.2:
Relationship of Translational Velocity/Moment Mobility
to Translational Mobility at a Single Frequency
- 44
-
(d)
N
-A.0318m
.90m
.009m typ-+
.L,
10-24NC x .25 in deep thd. 4 places
Excitation pt. #4
.inaeep t. 4pc
Excitation pt. #3
Excitation tt. #2
Excitation pt. #1
.0254m
Light scribe lines coincident with hole centerlines
Measurement pt. #4
Measurement pt. #3
Measurement pt. #2
Measurement pt. #1
Material:
1.00 in. x 1.25 in. cold rolled steel
FIGURE 3.1:
Test Beam Details
An = 6
.044m
typ.
=
I
W3
AV
I-*
T
;F3
()
W-4da)
HA)
Y
B
I~f
wwJ3
YOS a)
ynk1
Matrix of Desired Beam Mobilities
-.
46
,
FIGURE 3.2:
WA A
,
YA,
MB
4
Random Signal
Generator
General Radio 1390-A
I
Accelerometer
Bandpass Filter
Ithaco 4213
Impedance
B&K
4344
Head
WilI co xon
Power Amplifier
McIntosh MC40
Shaker
Ling
203
-------
Z602
Beam
Buffer/Attenuator
Homemade
Bandpass Filter
Krohn-Hite 3550
I
Spectrum Analyzer
Federal Scientific
UA-15A
[
Two Channel
A/D Converter
I
II
Minicomputer
Interdata M70
H-
Teletype
Test System Schematic Diagram
- 47
-
FIGURE 3.3:
Bandpass Filter
Krohn-Hite 3550
I
X-Y
Plotter
Oscilloscope
Acceleration Signal
Preamplifier
Ithaco 432
-30
LJ
-35
_*
Theoretical Magnitude
Experimental Magnitude
-40
Ui
-4b
-50
-55
-70
- 70
7
0
-75
-80
0
1500
1000
500
FREOUENCY,
(a)
2000
HZ
Original Mobility Obtained with Random Excitation
-30
1
U
LJ
S
-35
-
*
z
-45
0
-50
-
*
z -60
*
wI
Li
Theoretical Magnitude
Experimental Magnitude
-40
-65
X
-70CO
0 95-
E
Respons
-
-
>
0
FREQUENCY,
(b)
1500
1000
500
2000
HZ
After Substitution of Sinusoidally Generated Data
.
200
LO
-
-100
X
0
CL
7
-100
-Theoretical Phase
4A Experimental Phase
m
-200
0
FREOUENCY,
2000
HZ
Mobility Phase Plot
FIGURE 3.4:
Test Beam Translational Mobility *4
After Data Substitution
48
-
(c)
1500
1000
500
Before and
-40
LU
Lfl
-X
-50
H-
z
-60
X-
-70
-80
z
-90
H-
-- Theoretical
-100
-Experimental
Magnitude
Magnitude
F-4
oJ
*
tResponse
-110
gniud
Exeimta
-
0
-120
0
500
-Tereia
1500
1000
FREQUENCY,
Phs
2000
HZ
200
--- Theoretical Phase
ID
LU
6 Experimental Phase
100
0
H-
0A
W
a_
-100
AA
-200
0
500
FREOUENCY,
FIGURE 3.5:
1500
1000
HZ
Test Beam Experimental and Theoretical Transl ational
Mobility 1,2
49
2000
-30
---
z
*
-40
Theoretical Magnitude
Experimental Magnitude
Response
50
Excitation
-60
-70
-80
F-1
CD
o
-90
-100
500
0
1000
FREOUENCY,
1500
2000
1500
2000
HZ
200
Theoretical Phase
L--
A Experimental Phase
A
100
0~
H
-100
-200
0
500
1000
FREOUENCY,
FIGURE 3.6:
HZ
Test Beam Experimental and Theoretical Translational
Mobility *3,l
50
-40
LJ
-50.)
*
Theoretical Magnitude
Experimental Magnitude
z
-60
-*
co
-70
-
-.
-x
-80
-*
z
-50
LD
F-4
ED
0
-100
Excitation
Response
-
-110
~-
-120
0
1500
1000
500
FREOUENCY,
2000
HZ
200
LO
wj
-
Theoretical Phase
A Experimental Phase
100
wn
0
U,
-
I
1000
1500
-100
-200
0
500
FREQUENCY, HZ
Test Beam Experimental and Theoretical Translational
Mobility ' ,
2 2
- 51
-
FIGURE 3.7:
2000
-40
Li
w-
Theoretical Magnitude
Experimental Magnitude
*
-50
z
Response
w1
0
0Excitation
-70
z
-80
M
-00
-100
0
500
1000
FREQUENLY,
1500
2000
HZ
200
Theoretical Phase
-
LD
w0J
A
100
Experimental Phase
A
A
-Ru20
7
-100'
:3
0
500
FREOUENLY,
FIGURE 3.8:
1500
1000
HZ
Test Beam Experimental and Theoretical Translational
Mobility V3,2
- 52
2000
-40
-
*
U
Theoretical Magnitude
Experimental Magnitude
-
-50
Li
-70
z
S
OD
-80
X
-90
tResponse
Excitation
1X
-100
0
500
1000
FREOUENLY,
1500
2000
1500
2000
HZ
200
--
LiA
Theoretical Phase
Experimental Phase
100
0F-
3
2
-
-100
-200
0
500
1000
FREOUENCY,
Test Beam Experimental and Theoretical Translational
Mobility *4,2
- 53
-
FIGURE 3.9:
HZ
-40
Li
-X- Experimental Magnitude
-
Theoretical Magni tude
-
z
*-
-60
Excitation,
Response I
-70
z
-80
C
-
*
-90
100
0
500
1000
FREOUENCY,
1500
2000
HZ
200
Li
-
A
100
Theoretical Phase
Experimental Phase
Lfl
0
0
-100
:-
-200
0
500
1000
FREOUENCY,
FIGURE 3.10:
1500
HZ
Test Beam Experimental and Theoretical Translational
Mobility *3,3
-
54
2000
-30
LiJ
Ln
- Theoretical Magnitude
-X- Experimental Magnitude
-40
Response
CD
50
E Exci tation
z
Lii
M
60
-X-
70
CD
*X
-
80
90
100
1000
500
0
1500
2000
FREOUENEY, HZ
200
-- Theoretical Phase
Li
100
&
0
Phase
Experimental
A
A
0
A
-100
::-
-200
0
1000
500
1500
FREQUENEY, HZ
FIGURE 3.11:
Test Beam Experimental and Theoretical Translational
Mobility 4,3
-55
2000
LJ
--
S-X-
Theoretical Magnitude
Experimental Magnitude
40
Exci tation,
Response
-
-50
6-
*X
ED
-70
>_
-80
-
z
X
-X_
*
H4
mX
X0010020
X0
0
-100
0
1500
1000
500
FREQUENLY,
2000
HZ
200
--
A
100
Li
n
>_
A
7
-
0
Experimental Phase
-N-
0
n
Theoretical Phase
-100'
-200
0
FREQUENLY,
HZ
Test Beam Experimental and Theoretical Translational
Mobility 4
4
-
56
-
FIGURE 3.12:
1500
1000
500
2000
-15
I
-
Theoretical Magnitude
X Experimentally Derived
U~
wL
Magnitude
x
x
MX
x
2-
30
xx
Xx
xX
L:7
T
x
x
xx
x
x x
x
X
XX
X
x
-45
0
500
1i000
FrE0JENCY,
1500
2000
1500
E000
HZ
LID
200
- Response
Excitation
IF
100
IL
0
-j
1-4
-100
-
Theoretical Phase
v Experimentally Derived
Phase
-200
0
1000
500
FR n
FIGURE 3.13:
LE NE Y,
HZ
Test Beam Experimental and Theoretical Rotational Velocity/
Force Mobility YB FA
- 57
0
Response
f
Excitation
Li
w
-- Theoretical Magnitude
X Experimentally Derived
Magnitude
10
Ln
z
X
Lii
fm
Kx
I
-30
X
xX
XX
Ix
SXX
X
-40C
-
XX
X
X
X
Mi
x
X
x
I
X
FT-
-EO
X
X
X
X
X
LL
x
X
x
-70
x
x
-
BO
0
1000
500
FRECU ENEY,
1500
2000
1500
2000
HZ
Li
200
VI/,
Li
Tj
.0
t-i
CD
-100
v
-200
n
Theoretical Phase
Experimentally Derived
Phase
1000
500
R7PEOUENCY,
(
Test Beam Experimental and Theoretical Rotational
Velocity/Force Mobility YOFB
- 58
-
FIGURE 3.14:
HZ
LP
0
z
x
x
xX
X
x
X
-10
xY
X
-
z
F-
-J
-20
XXX
-30
x
X
X
%X
X
x
X
-40
-50
0'
ii
-
X
-60
Excitation
Response
Theoretical Magnitude
Experimentally Derived
Magnitude
-
w
x
x
X
-70
FREQUENCY,
2000
1500
1000
500
0
HZ
200
Experimentally Derived
Phase
LI
v
100
L1-
0
1V
-100
I
CD
-- Theoreti cal Phase
-200
0
FREQUENCY,
FIGURE 3.15:
1500
1000
500
2000
HZ
Test Beam Experimental and Theoretical Rotational Velocity/
Moment Mobility YOM ()
- 59
-
?XX
X
~
10
Li
I
I
i
.
.0006
I
.0004 F-
.0002 I0
a,
(A
*1-~
.0000
imt-
dMP-
ak.
-
WP
PO
-
E
-Q
0
'4-
-. 0002
0
4-,
C
a,
0
0~
E
0
-. 0004
1-
O---O
2x(-4)x"3,2
L2~-~ ~2x3x$ 4, 2
0-lx16x ,
a,
3 3
7
-. 0006
-. 0008
7
0-cD---O
I
220
I
2x(-12)x 4,3
lx9x$ 44
1xl x 2 , 2
I
260
Frequency,
|
240
I
280
Hz
FIGURE 3.16: Constituent Terms of Derived Experimental
Vbbility Y
MB(w) Over a ftrequency Band
- 60
-
of Large Scatter:
Real
omponents
II
300
.020
-
I
II_
I
p
0
I
2x(-12 )x 4,93
.015 I0
aw
0l
4--)
E
.010 I-
-o
.005 F0
2x(-4)xiP3
2
0
4-)
.000
lxlx
E-
2 ,2
-. 005
1x9x M4
-. 010 1-
lx16x
-. 015
3 ,3
I
240
220
I
260
I
280
I
300
Frequency, Hz
Constituent Terms of Derived Experimental
Mobility Y0 BM (w) Over a Frequency Band of
Scatter:
Large
-
61
-
FIGURE 3.17:
Imaginary Components
I
I
I
iI
I
i
I
.120 I-
.080 1Imaginary
Component
E
W%-
.040
-
a-)
.000
C,
--
-. 040 1-0
Real Component
-.080-
-. 120
|I
220
240
260
Frequency,
I
300
Hz
Quadrature Components of the Derived Experimental
Mobility YBMB (w) Over the Frequency Band of
Figures 3.16 and 3.17
- 62
-
FIGURE 3.18:
I
280
0
II
A= AE
Lfl
I
= .044m
Magnitude
[---Theoretical
-10
Derived Magnitude
-)--Response
z
!
Excitation
-20
x-
-
'N
wf
-40
-50
-70
-BO
0
500
1000
1500
FREOUENEY,
2000
HZ
w
200
-J
100
Theoretical Phase
v Derived Phase
0
m
-100
11
-200
0
500
1000
FREOUENCY,
HZ
Rotational Velocity/Force Mobility YB F (w) Derived by
Differencing Theoretical Translational Mobilities:
An = AE = .044m
- 63
-
FIGURE 3.19
1500
2000'
10
X
X
U
LF)
0
z
-10
-20
M
F-l
xx
-40
zx
<
X
-50
-80
=
T
KExcitation,
--Theoretical
at= .044m
Magnitude
x Derived Magnitude
)Response
I
-70
0
500
1000
FRE0UEN[Y,
1500
2000
HZ
L
200
<
I
100
-100
D
- Theoretical Phase
Derived Phase
Ax
K
-200
I
0
500
1000
FREOUENCY,
FIGURE 3:20:
1500
2000
HZ
Rotational Velocity/Moment Mobility Y0B (w) Derived by
Mobil ities:
Di fferenci ng Theoretical Translational
a= at=
.044m
-
64
0
An=AE
Li
wL
Lfl
=.088m
-10
z
Theoretical Magnitude
X Derived Magnitude
Response
Excitation
L-
----
x
X
-20
-30
x
-40
CD
-50
-S0
x
x
-
-70
-80
0
500
1500
1000
FREOUENCY,
2000
HZ
200
-
L:
Ln
71C
Theoretical Phase
V Derived Phase
100
a-
0
CD
HA
=5
-100
-200
0
500
1500
1000
FREOUENCY,
HZ
FIGURE 3.21: Rotational Velocity/Force Mobility Y BFB(w) Derived by
0BFB
Differencing Theoretical Translational Mobilities:
An =A = .088m
. 65
2000
X
X
,
10
Li
AX
0
z
-10
LiJ
-20
C13
-30
-
xX
xx
xMxn
xd
x
x
-40
x
x
-50
E
Theoretical Magnitude
-.088n
X
[j Excitation,
-
-
-F0
X Derived Magnitude
Response
-70
0
1500
1000
500
FREOLENCY,
2000
HZ
Li
200
100
CD
0
T
-.100
Theoretical Phase
v Derived Phase
0
IFREOUENEY,
2000
HZ
Rotational Velocity/Moment Mobility YEB
(40) Derived by
Differencing Theoretical Translational Mobilities:
An = A = .088m
- 66
-
FIGURE 3.22:
15Ij00
1000
500
u
----- Theoretical Magnitude
Derived Magnitude
A022AC
Response
E
Excitation|
-10
-20
0
frn
-
z
-30
-30
-40
-9-
500
0
1000
1500
FREOL-ENEY,
2000
HZ
CL
200
- -Theore ti cal Phase
Derived Phase
-100
-0
0
500
1000
FREUENCY,
HZ
Rotational Velocity/Force Mobility YOBF B(w) Derived by
Differencing Theoretical Translational Mobilities:
An = A
= .022m
_ 67
-
FIGURE 3.23:
1500
2000
10
Li
0
FY
Mu
-10
- 20
Lu
-30
-40
X
-50
An
=
A
9
022m.
---
Excitation,
Response
Theoretical Magnitude
X Derived MagnitLude
- -70C
7O
0
1500
1000
500
FREOUENEY,
2000
HZ
Lu
200
LJ
Lu
n
<_
100
0Q
0
100
-
-00
0
Theoretical Phase
Derived Phase
1500
1000
500
FYEQLFNEY,
2000
HZ
Rotational Velocity/Moment Mobility Y
B (W) Deriv ed by
Differencing Theoretical Translational Mobilities:
An = AE = .022m
- 68
-
FIGURE 3.24:
v
REFERENCES
1.
W. C. Ballard, S. L. Casey, and J. D. Clausen, "Vibration
Testing with Mechanical Impedance Methods," Sound and
Vibration, January, 1969, pp 10-21.
2.
J. V. Otts and C. E. Nuckolls, "A Progress Report on ForceControlled Vibration Testing," J. Environmental Science,
December, 1965, pp 24-28.
3.
R. M. Mains, "The Application of Impedance Techniques to a
Shipboard Vibration Absorber", Shock and Vibration Bulletin,
33, 4, March, 1964.
4.
A. L. Klosterman and J. R. Lemon, "Dynamic Design Analysis
Via the Building Block Approach", Shock and Vibration Bulletin,
42, 1, January, 1972.
5.
R. DeJong, "Vibration Energy Transfer in a Diesel Engine",
ScD Thesis, MIT, Dept. of Mech. Eng., 1976.
6.
D. U. Noiseux and E. B. Meyer, "Application of Impedance
Theory and Measurements to Structural Vibration, U.S. Air
Force Flight Dynamics Laboratory Tech. Rept. AFFDL-TR-67-182.
7.
F. J. On, "Preliminary Study of an Experimental Method in
Multidimensional Mechanical Impedance Determination",
Shock and Vibration Bulletin, 34, 3, December, 1964.
8.
J. E. Smith, "Measurement of the Total Structural Mobility
Matrix," Shock and Vibration Bulletin, 40, 7, December, 1969.
9.
D. J. Ewins and P. T. Gleeson, "Experimental Determination of
Multidirectional Mobility Data for Beams", Shock and Vibration
Bulletin, 45, 5, June, 1975.
10.
E. Isaacson and H. B. Keller, Analysis of Nwnerical Methods,
John Wiley & Sons, Inc., New York, 1966.
11.
J. W. Leech, L. Morino, and E. A. Witmer, "PETROS 2: A New
Finite-Difference Method and Program for the Calculation of
Large Elastic-Plastic Dynamically-Induced Deformations of
General Thin Shells," U. S. Army Ballistic Research Laboratories,
ASRL TR152, Contract Report No. 12, December, 1969.
-
- 69
REFERENCES (Continued)
12.
S. Timoshenko, D. H. Young and W. Weaver, Jr., Vibration
Problems in Engineering, 4th Ed., John Wiley & Sons, Inc.,
New York, 1974.
13.
L. Meirovitch, Analytical Methods in Vibrations, Macmillan
Company, 1967.
R. D. Cavanaugh and J. E. Ruzicka, "Vibration Isolation of
Non-Rigid Bodies", Colloquium on Mechanical Impedance Methods,
ASME, New York,1958.
-
70
-
14.
APPENDIX A
THEORETICAL MOBILITIES OF A FREE-FREE BEAM
I
The governing partial differential equation for the
free vibration of an undamped uniform beam is given by Eq. (5.82) of
Ref. (12) as
42
T 0-&(A.1)
The derivation of this equation, referred to as the Bernoulli-Euler
beam equation, is based on the assumption that the effects of rotary
inertia and shearing deformations are negligible in comparison with
the effects of translational inertia and flexural deformations (i.e.,
the beam is slender).
The free vibration mode shapes and frequencies are obtained by first assuming a harmonic solution of the form
-
71
-
(A.2)
Substitution of this expression into Eq. (A.1) results in the ordinary
differential equation
B~I,",~a
(A.3)
where the prime notation indicates differentiation with respect to x.
Setting
.10oa.~)
)
(A.4)
the general solution of Eq. (4.3) can be written
Tex) -/s>,
4
1pR
+GCOSCpx+C 3 s-- px+C4 cospx
A.5)
for which the first three derivatives are:
h(?x') =?
(
)
SkzA lK +COZ COsyx -p 6 4 s/fX
osCh~w
71x' 4p
CO
?
e
COS/?x
35/''Px->C
-p 7Lh
IX-
CO5XS
P
.6)
(A
S/f
The boundary conditions for a free-free beam are as follows:
- 72
-
W&I() =
Z-
2.
oy,
L0
=L=0
4J
(A.7)
or, simplifying slightly,
W/o) = 0
,W()=0
(A. 8)
W"'()=O
Inserting the Eq.
(
W'"(O)=
A.8) boundary conditions into Eq. (A.5) and (A.6)
gives the system of equations
5ifA
cos4ifA
si;7p1
-
-C
5ky2~/
0
Ca.
-
/
0
cas/i
C
0
0
=0
Cl
-coy/v 1
0
0
O
(A.9)
For nontrivial results, the determinant of the above 4 x 4 matrix must
be equal to zero; effecting this condition yields the characteristic
equation
co&4,
(A.10)
/
COSg>d
The roots of this characteristic equation are the eigenvalues of the
problem and are given in p. 165 of Ref. (13) as follows:
-
- 73
(rigid body modes)
,zI IP, 73= 0
,Vz? 3 =
A 2 (?r/4
4763
(first elastic mode)
(A.ll)
(second elastic mode)
r >4
The natural frequencies are given by:
-
r4
*EI(Pr~)4
~.AA
or
64-4
(A.12)
The eigenfunctions are found by arbitrarily setting
and using the first two of Eqs. (A.9) to determine that
and
6c=0.
When these results are inserted into the third of
Eq. (A.9) it is determined that:
Cas pI
/
- C0
IZ
3
Then, the rth eigenfunction of the problem is:
4z[cos/A
+ COS~rY
~p
- 74
-
(A .13)
for each eigenvalue
,- r
...
,
where.4.- is an arbitrary
For the special case of the rigid body modes
multiplier.
the eigenfunctions are:
()
=
(rigid body translation)
(rigid body rotation).
W )..
Let
(A.14)
,A(Y)denotethe bracketed quantity in Eq. (A.13)
for modes r=,23 .. ,,
Per Appendix B of Ref.(14) the functions
have the orthogonality properties
el (y4 0
g /V
= dX
ny#?
(A.15)
Also, per p. 164 of Ref.i(13), the functions $/
are orthogonal to each other and to the functions
these functions also
and
4.X)
have the properties
3
(A.16)
At this point the forced vibration response for the undamped beam can be evaluated in terms of the preceding eigenfunctions.
-
- 75
Let
w(x~,zt)
(A.17)
(x4
Ar
where the %,() quantities are time-varying generalized coordinates
Placing this expression into the governing partial
to be determined.
differential equation with forcing term,
$f~4A-f4
=(
-
7
)
(A,18)
yields
19;0
1,
2I~-
74-
0
Now each term is multiplied by
(A.19)
4x)
and the resultant expression is
integrated with respect to x:
r=O
Y
I 444Z~- 1JSX,t-=O
If the eigenpair
4
AX4.
. satisfies the undamped homogeneous
differential Eq. (A.), then
-a
P 4-=0
- 76
-
z1~r,""
(A.20)
and
5 C
4-,
(A.21)
J.
substitutingjq. (A.21) into Eq. (A.20) t en yields
,
DOA
4-~
1~~
f0
(A.22)
Applying the orthogonality properties, this result reduces to the normal
mode equations of motion,
S))=
~~WO4
It1p
=
where
..
is the modal force of the rth mode.
X
Damping of the elastic modes can be taken into account by modifying
Eq. (A.23) to the form
+o__)__+A
(A.23)
is th-e modal mass of the rth mode
rX
and
,/
)Z(A.24)
is the revised modal force,
where
is the prescribed excitation loading exclusive of damping forces, and
2$, is the equivalent viscous damping ratio of the rth mode.
To obtain mobilities we will apply loads
i(t)C(_ I
-
- 77
denotes the Diract delta function at
where
4Wr
location X-
X
The pertinent response for each mode will be the steady-state sinusoidal
generalized displacement
>) ot
-f-t) = XPO
'I,-6
where amplitude
X, (W)
(A.25)
is complex.
We will examine this
response mode by mode:
r= 0
a*
0
#1.m
7..)
-
(A.26)
r=
J2
/Z
/2-
4)
40t',6i -a)(
- 78
-
0'
I 2aj)e
'5
Z'XL7)
(A. 27)
r = 2,3,...
Or
4'(>) Mr"fdx-)4,()<d~41-n
=
aeo't#,g
P(),4V
.-. X ()
(A. 28)
As a consequence of Eqs. (A.17) and (A.25), it follows
that
(&t-)
.A
=E
r=0O
A
(
c.40).X(a)e
i
l!t
(A. 29)
The mobility is then the ratio of the complex amplitude of the transverse velocity at / to the amplitude of the transverse force at 9 :
F>)
Using Eqs.
&0v 047(/)
_01>)
r=O
(A.26), (A.27) and (A.28), we obtain the resulting
expression for translational mobility:
-
- 79
(A. 30)
/
_
W(W)
9
-
)
a()
IZTI1.A/
jWb7
(A. 31)
In accordance with Eqs.
(2.5), (2.9) and (2.11), the rotational
Tca>)
c?
-
)
mobilities are given by:
iw nI /2
~~
'
10-2
.(v)
&f&)
0()
Mw)
"7 r-=2
/A
=? aZkIw
4~ 4(i)
2
(A. 32)
&32--w U 2? .S',~i4-io
Z
~$g(/7)4iv
4rgOgZZa>
iWr~ 2 W
l~,LLZ SrWrW
The series terms in the above expressions are truncated to highest
mode numbers r = N for computation, where
,
<9
.
N
is determined such that
The latter condition, in turn, ensures
that the exact mobilities are approximated by the truncated series
results within much less than 0.5 dB deviation.
-
- 80
APPENDIX B
COMPUTER PROGRAM THEOR
C
C *****.*******pIRevRqM
THEOP
************
C PDvGRAm TO CAICUIATr, STORF, E PLOT TBEOPETICAT
C
NOnTTITTFS (rAfrNTTUDP & PHASE)
INTEGEP*2 PUTNTD1(40), CASETD(40)
INTFGWT*2 YLA4), XLP(40)
'lTVNSI0N
TRANSLATIONAL AND ROTAlTONAt
OnECR(25),ANUF1(2c),ANU?2(25), ANUM3(25),
ANUM4(25)
AMM1B(1,210), PgrTB(1,210), 75(4)
CV!PLFX kDEND, AMOP
D-"BTF OPFCTSTON 7,DPPL,A1PHA,PP,PRT,P3XT
DnTIPLF rP1RCISION PHY, PHXT, PHPPX, PHDP7I,RCSH,DBSNH
C D7FTN7 DOUPE PRECTSIWN SIWH , COSH ARTTHMWTIC STATEMENT FTNCTTONS
DT1FNSION
DCSH(Z)= (DEXP(Z)+rEXP(-7))/2.
nl SvH(7)= (DETP(Z)-DEXP(-7))/2.
DATA XF/ 0.,2000.,-400.,400./
DErTNF rITP l (15,420,U,NPP)
C
)'AI PPTPEPTES: r=(N/**2), AT= I (***4),
"),
7ETA= AFSTUED
VAVPING RATTO
CELCU-
AM= TOTAL MASS (rG), Al= IF GT4
(
C NqP7QZ= Nn. 07 FORCTNM. FPEQS. (INTECER) FOP WITCH Mf)PILITIFS WIII BE
LATED, !PACED TNIFOPMLY, UP TO F1AX (FLOATING)
C
CHECW DIVENSTON STATEMENT FOP ARRAY SIZE
C CAUTIOnRVAD (P,8r') RIIRTD1
P AD (8,95) NCASES
D-AD
(9,130) vrPEQS, FvAX
or -1. (0,100) 7,kTI,AM, lT,,FT A
Q
F "rAT(40A2)
95 F')RvAT(T10)
130 FOUAT (I10, F10.0)
1lrv F0nP'ATr (F10.1, F10.2, 3F10.3)
WQTTE (5,qC)
UNTNID1
WRTpF (5,140) E,AI,AM,AL,7FTA
WTrTE (5,160) NqREQS,FVAX.
90 F"R?4AT (21 ,4042)
14V FOPVAT(3H0P=,E10.3,4H
I
C
I=,10.3,4F
M=,F5.2,4
L=,F5.3,
ZE"A=,F7.4)
vAy rpEO =,F5.O///)
Dl F000 NCA17E= 1,NCASES
X= 10CATION OF VElOCITY,'XT= lCfATION OF FORCE OR MOMENT, KWF THRU XTHV ARE
CONTPOLS OF WHICH TYPEF. OF WCRILITIES ARE GENERATED (1 FOR YES, 0 FCR NO),
NSWF, ETC. ARE NOV. OF PLCTS CF EACR TYPE DESIPED: 0= NONF,1= MAGN. ONTY,
2= MAGN. C DRASE
160
C
c
7P
FnPMAT(14HOWO Or FPEQS =,I4,12H
81
-
C
C CAUTTIN- PIOT CONTROl DATA AND IARFL CARDS PUST BE PROVIDFD CCNSISTFNT WTTH
C
ABOVE INPUTS
C LCWr, ETC. ARE DISY lOCATIONS FOR STORACE OF RPSULTS- SUPPIY0'' WHEN MCMLITTES APE NOT TO BE STCRED
C
READ (R,80) CASEIT
PEAD (p,110) X,XI,KVF,YWF,YTHF,KTffM
READ (P,120) VPWF,NDWM,NPTHF,NPTHM
AAD (R,120) ISWF,LSWW,LSTHF,LSTHM
110 FODRAT (2F10.2, 4110)
120 FCORAT(4I10)
PDT= 3.141593
R!I0= AM/AL
,PDAD
(F*RT/(pHOA*AL**4))**Q*I5
Rv.AY= C.54(1./PTE)*(4.*PTF*r~WAX/PPAP))**0.5
?qv'WX= RMAX+ 1.
qRITF'(c~r0) CASFTD
WPTTE (5,150) XXI, KWFrXW~rKTHVFTHN
W'vTTE(fi,155) 'FPVFrNDW!rNPTVFoNPTP!
WPTTF( 5 ,156) Tl-wF,1c~wLTFISTVMJ
KT1P'=t
KW=,12r7H
150C F rI.wAT (3V Y= , 6 .3 5F YT=,6.3,6H YWF=,T2,6H
'I T 2, 74
TWO! =, T 2)
WPT'I=,I1)
NPWT=,T,9H,
T'P TF=,T1,9H,
155 Fn?'IAT(6H0VJPWF=,I1,%IH,
LSTH=,pT1)
TSTHr= ,T I 9R,
15)( FrP JT(6PCTWF,1,PV,, LSWV=,T1,0H,
C'ILCUIATE WfDRL PARPFTFPS OF PFCU1RPTNG USF
WPTTr (5,17f))
VPFQUJERCTFS OF VTPPATrPY MODES,14%/)
110 r',PI!AT(i4P0
WJUAI
Dn 400 VR= 2, NRMAX
IF M~-3) 210,220,230
210 PT=4.730
t7 '
TO
0 7 W
214n nm7Vp(NP)= (PPL)**2*PPA)
WD.TT7
3:0 F0P!4AT
(c',3n)
r'pEox
(20 y,F10.1)
?djP"A= (DJz'SNq(pDDp)+DSTV(DPPt))/(!Ml3CSP(DPRT)-DCoS(DPrRL))
)
FT 0= D PI F'( P t/A
PPXT= r~PtF(PRL*X/A)
PIXYDPCS(PP)+DCINPR)-AIPHA*(DPSH(PP!)4DSIM(PRX!))
'OUYT=D' 7rS1J(PPXT +~SPY)AtH*DSPPTT+SFPY)
PTIPRXI=PR*(DB5FW14(PRXT)-DSTV(PPXT ))--!LPPA*PD*
1(DPC'SH(DvXT)+DC09(PRXT))
T
VITJ?02(wP)= 1.NLPR*"R
ANT1V3(VR)= SN!PPXDFT
AkU?44(NR)= SV17h(PPPRX*P4PPXT)
CALCUIA"E W/F VOBTLTTTFS TF S"r-CTFTED TN TNPUT DATA
1000 II' (KWV-1) 2000,101001010
11,10 D!1 15CC NPT= 1,FFREOS
0m~rA= 2.*T*vAX*rCATIPT)/FLOIT(NFPF0S)
BNU! = (X-A/2.)*(XT-AL/2.)
BI)Fg r~ECA*Av*(Al**2)/12.
Aw)+CVPI ( Ulf0 0)/CwPIX
Awoq= p ly ( 1 .0 ,0 .0) /CVP IX(0. 0 ,OFA
D!' 140fi NRP= 2, NRM'AX
PDEN~= (0MEGRUJRR))**2 -rOI'RGA**2
C~vWV 2.0*ZFTA*0ME9R(NRP)*!MEGA
UD1 "D= CP'DtYUNUTM1(WRP) ,0.0)/CPL(PDW,CDF'f)
CCnvEW= ONEGA/Am
14,10 A~nR= AT0R+CNLX(0.fl,CCOEF)*ADWD
A~MO(1,NT)=20 .*AL01~10 (CABS (ANO0B))
C MVr4ITI"DE Tn DR RE 1 M~/ NT SEC
-82
Es
-
-
Avwd'(
dih Qvt1E UC
soad~lbN 'L =&Wt
iii SaILI1I~a0W avlaiil
'DOSE ;VQ OLG
a
.
t.lvcI .fldAI ki1 GadI3~ds
~Fl2V,)X)
&dIX (OYS'b) Cli'?z0 i O9~
oOYz'OOOE'CdJOE (L-Aridi4) at
W/
=OAhcad
aI XU
j1% V Y VLMi
(L-dc~oN) 0* ),
X('a'Xit) d da V k
i
(. d
-Z
Jc~) GLd"
s
(kXoAA)ZN*J1V
= AlI1
*dk)5i
OLO~~2OLO
atiaa9'O(Qw'UO
I a - dk)
d, ti ) l akUO)
V a*,
a i
O
=
~.))ti^
;t
.* I C D
i d
(
) IuII 176 k
iiid0
j Z 0 ikfli0t Xrla U
ViY
s it t
afit")IIvtto3 cQQOS
009ti'000'000 (L-khldM.)
(sLcjt7'c.3)
(iihl~i lsO
ilOA
a.L1'am
N ID-Li?
i
SLiTII.t
L -I.
i
hi a flIN
V
Z-
iSt ,i
(L-AniLA)
E
(o'/
aI
avihi 1
I=Qb u.L
id,
ElfVl
Xl1111'(d
OLS17
0im4)D1t.a =,kA
/4id
t717.T
/~C;
(Gt'O)~d/O'0dhLAiaA..
OLO00i04Oot1'u
ildt t[ G~i~X~S
,YE
s
o z~ dc rJI flLI t
of iu-a
OECOGtt
(Md'G
3LS
Appfi1 C
COmPVT
C
C
C**********PRGRA
PINM TRMS
TRANS************
PROGRAM TO CALWULATE, STORE, - PLOT TRANSLATIONAL MOBILITY FUNCTIONS FFON
CCRER PROCRAP ETP*TAt SPECTRAl DATA- ALSO PLrTS STORED THEOR. NOBIIITIES
INTEGFR*2 IDTAPE(40),XLA(40),TLPP(40)
DTrENSICN AR!AY(7,210),AWSCL(4),PHSCL(4)
C
C
C
C
C
C
C
C
C
C
C
-
85
-
C
DATA PHSCL/ O.,2000.,-400.,400./
DEFINE rTIE 10(20,420,U,NRP)
DEFINE FILE 11(15,420,U,NRQ)
READ NO. OF TAPES TO BE PROCESSED IN THIS RUW
READ(8,100) NTAPES
100 FORMAT(M2)
DO 1000 NT=1,NTAPES
READ IN CONTROL DATA FOP EACH TAPE
TAvSCL=1 FOR AUTOSCALED PAGNITUDE PLOT; -2 FOP SCALING PER AMSCL DATA
LLAR=-4 FCR EXP'TAL DATA TO BE CCNNECTED PY LINES; -4004 FOR DATA SYMF#LS;
THEOR. DATA CONNECTED RY LINES IN EITHER CASF
IAMCCN=-10 TO PLOT EXP'TAL 9 THEOR. WAGNITUDE5; -8 FOR EXPITAL ONLY
FOR EXP*TAL ONLY
TPHCnN=-68 TO PLOT EXP*TAL & THEOR. PHASE; -6
LSM,NWFRFQSNPLOTS,NLISTNPRLSTHEOFNAX
IDTAPE,
P"AD (P,200)
READ (q,205) (AMSCL(I),Izl,4),IANSCL,LLAP,IANCOW,IPHCON
200 FORMAT( 40A2/6110,F10.O)
205 FORMAT (4F10.0,4I10)
READ PLOT 1ABELS IF APPLICABLE
IF (NPLOTS-1) 240,210,210
210 READ (9,220) XLA
220 FORnMAT(40A2)
IF (NP!OTS-1) 240,240,230
230 READ (8,220) YLPH
PFAD ONE TAPE'S DATA FIOR CARDS
240 PEAD(P,300)((ARRAY(TJ),If1,4),J=,NFREOS)
300 FORMAT (F6.OF6.1,6X,2F6.1)
I (NILTST) 400,400,350
LTST INPUT DATA I? SPECIFIED (NLIST = 1)
350 WRITE (5,360) (fARRAY(I,J),I=1,4),J=1,NFRErS)
PHIAF$
CPSDAF
PSDF
FEQ
360 FORMAT ('
1//(71,F5.0,3E15.4))
REDUCE COHERENCE PROGRAM DATA
NOTE- NO IMPEDANCE READ MASS OR FLEXIBILITY CORRECTIONS INCLUDED
4)0 DO 500 I=1,NFREQS
W= 6.2R318*ARRAY(,I)
ALP = 2.*(ARRAY(3,I)-ARRAY(2,I)) -20.*ALOG10(W)
PHASE = ARRAY(41,I) - 90.
ARFAY(4,I) = ALM
IF (PHASE - IO.) 420,420,410
410 PHASE = PHASE - 360.
420 IF (PHASE + 180.) 430,440,440
430 PHASE = PHASE + 360.
440 ARRAY(7,I) = PHASE
AM9N = 10.**(ALM/20.)
PHASE = PHASE / 57.29578
ARRAY(2,I) = AWGN * COS(PHASE)
ARRAY(3,I) = ANGI * SIN (PHASE)
500 CCfININD
ITr (t5v) 565,565,550
CWPTTE WOBIITY CO C QUPP COMPI~'NTS ONTO DISY IF tSN>o
550 WPTTF(10LSI-Z) U(ARRAY(IJ),,T2,3),J,NFES)
WPITF (5,o560)
560 FOR*AT (tryPEPTNENTAL !NCBTIITY FTLED')
r,65 It' (tSTuEC) 575,575,57M
c P1'AD THF'ORETTCAL TMOBTITTY FROr DTSK IF LSTPFr>r
570 READ (11'tSTHEO)((ARRAY(I,,J),I=2,3),J=1,NFPEQS)
572 POPPAT ('TT~rOPFTTCA1 14(R)'TITY PEAD FpOr FIFI)
57F WPTTE(c-,60f)) TDTA PF,LS14 f 'rFrQS M LOTStFNR XLSTHFO
FlqAY=ItFc5.oo
13,' NPL0TS=',I,Tl
TV (NPP) 650,650,625i
(NPR=1)
C PT'T OUJTPUT1 n;ATA IF SrrCTFIF)
625 WPTTF(5,640) (~PYIJ,=,)J1N'E~
CO
t'RFO
6L40 FORWAT(*
3E15.LI,,F1O.2))
1 'PSFIf/(3Y, F5.O,
650 Tr, (NPT"'TS-1) 1000,700,700
CPIOT MOS'ILITY ~ICNITUDE IF NPLCTS1l OR 2
1
LSTPEO=o,12///)'
oQuTAq
1
It' WNPOTS-1) 1000,1000v9Z0
C t'IIT !qniJl.ITY PHASE IF NPIOTS= 2
900 C'LL PICTP(PRPY7YLPPPSCIPCONN'RFO-r,O,-1LBr,2,F'AX,1)
1%0 C"IIVTI~ur
STI"P
F
I'
r
-86
APPEIIX D
CUWviER PSNM ROTAT
C
* ***
* * ** ****P1GV
ROTAT************
TO CAtCULATf, STORF, 9 PLOT ROTATIONAL FOBILITIFS FROM STfRFD IRANSLAC PROGRK
C
TI'NAL MOBILITIES USIN' BACKWARD DIFFERENCEr
INTrGEP*2 PUNTD(40), tANAG(40),LAfPH(40)
DT"ENSION SYMN(2,210),SYNNI(2,210),SYPN2(2,210)
nTvWNSIN SYVIN(2,210),SY'INI(2,210),SY1WN2(2,210)
D)TMENSION SYM2N(2,210),SYW2N1(2,210),SYw2N2(2,210)
DIVENSIIN PHS(4), WrS(4), WNSM4, THFS(4), THMS(4)
DATA P45/O.,2000.,-400.,40C./
DEFINF VILE 10 (20,420,U,NRP)
DEPINE FT1Y 11 (6,470,U,WRC)
C RSAD RUN IDENTIFICATION DATA
RPAD (P,90) RUNID
q0 FCRNAT(40A2)
t EXCITATION LOCATION NOS. AND WPICP TYPES OF MOPILITY ELtFENTS
C RrAD NOTIC
C
'RA To 3E CREATED:
READ(R,100) NY,XI,KWFEX,KWWEX,KTHFEX,KTPPFX
1)0 FOPFMAT(AT5)
1 RFAD mASUR1?WENT POTNT NUMPERS W, ?-I, M-2, pNr DRIVING POINT NUMBERS %,
N-1, N-2; 1TPPIY 1O' WHERE NUMPBR IS N/A:
C
P7AD (P,1rO)
,,2,,,2
C RFAr POINT SPACING VALUES (UNITS- M.), NO. OF FPEOS., MAX. FREO.:
C CAUTI'N: CPECK DIWENSION STATFMENTS FOP APPAY 'IZFS VS. INPUT NO. OF FFEOS.
priD (p,225) PELTX,DELTXI,NFRQS,FrAX
225 FCR!AT(2F5.3,T5,F5.0)
C R'AD DTSK ICCATIOW NUMPEFRS OF TPAVSLAT. MOPTIITY FILES TO RE READ- SU;PIY
C
'O'
WHER7 NUMBER IS N/A:
READ (8,25O)LSMN,LSV1N,LSM2N,LSNM1 ,ISW1N1,ISR2N1,LSNN2,tS1I1N2,
1
TSW2W2
WPITE(5,45O)LSNN,LSW1N,LSN2N,LSMN1,tSW1N1,1SN2N1,LSN2,LSW1N
ltSr2W2
WPITF(9,50) tSWFX,LSWFX,LSTHFX,LSTRlX
W6ITE(5,525) NPWF,NPWM,NPTHF,NPTHW
-
- 87
,
25C FCRWAT(915)
WHFRE NUMBER IS N/A:
C READ DISK IOCATIOVS FCP STORAGE OF RESULTS- SUPPLY 0
READ (8,300) ISWFX,LSWMX,LSTHFX,LSTHNI
300 FCRMAT(4IS)
C RrAD NO. OF PLOTS OF EACH TYPE OF MOBTLITY DESTRED: O-NONE; 1= MAGN. CNLT;
MAGN. AND PPASE
2
C
Rt"AD (A,300) NPWF,NPW!,NPTHF,NPTPN
C READ SCALE DATA FOR MAGNITUDE PLOTS
PFAD (0,320) ( WFS(I), 1-1,4)
RrAD (9,320) ( WNS(T), T=1,4)
READ (8,320) (THFS(I), 1=1,4)
READ (P,320) (TRMS(I), I=1,4)
320 FOPMAT (4F10.O)
C PRINT OUT INPUT CONTROL DATA
WPITE(!,325) RUNID
32S FORMAT(IH1,402)
WRITE(5,350)NX,WXI,KWFEV,KWMEX,KTHFEX,TPMrX
WTITE(5,400) M,M1,M2,N,NI,N2
WPITE(5,425) DELTX,DELTXI,NFREQS,FNAX
2
3%, FrnPAT(O0COPUTF
MBIlITTIES FOR MOTTON LCCATION' ,T2,' AND FXCTTAT
I TON i'"ATT'Y' ,12//*P
KWFFX=',I1,',
vNmFX=',Ii,',
'THFEX='
KTPM-tY=',T'/)
?2,T 1,*,1
4*-'C PCRMAT(20
' EASUBrMENT PT!7.: 19 IS ',T2,0,
til T!;.',T2,',
wl2
1I
',T2/9
rORCTN(' ?TS.:
N IS ',12,',
Ni IS ',T2,',
N2 IS
2, T2/)
42r FnrTMhAT('O
POTNT SPACTNq VALUES:
DFLT=',F5.3,",
ELTYT
=',
N. OF FPEQS.=',13,',
MIX. FPEC.=',F5.0/)
4%0 FCP'AT(OI4NPUT TRANSL. MnOBILITY DTS'3 STOPA-F LOCATIONS:'/20X,'(",N
1)
T! ',I2,,
(VP-1) IS ',T2,',
(r,N-2) IS ',I2/20X,'(1-1,N) I
2 -,2,',
(
P1,N-1) IS ',T2,',
(T-1,N-2)
IS f,12/20X,'(M-2,V)
3 ',T2,',
(V-2,o-1) IS O,2,',
(W-2,N-2) IS ',T2/)
q'O PPMAT('0CJTPTJT MOPTIITY TDISY STORAGE LOCA IONS:'/*
W/F IS ',
1?,',
W/W IF ',12,',
TM/F IS *,T2,',
TR/M IS ',12/)
52r FP AT('CvPETRIMENTAL PICTS TO BF MADF:
W/F:',I1,',
W/M:',Ti,',
1 TJ/F:I, T1,I
Tq/14:',Tl)
C P-An T.INFI. MnPIITTY rITA FPOX DISK nVTO APPAYS:
TT (KTHMEX-1) 60,550o,550
55 r AD (10'LSVN
((SYIIN
(IJ ),oT=1,2 ),J=l ,'NFPEQS)
TA (1!1 1 9 ) (- V V V N (IJ),T=1,2 ,J 1,FREOS)
P% PFM (10*1720
P107
(17'7
A,? (1
) ((SY MN
(I,J),T=1,2),J=I, FREoS)
rSMIN (SYVIN1
(1,JI=I,2),J=
1,FPE5S)
2 "1I1) (SY N 1 1 IJ), =I ,2),J= 1, vFR EOS
DAn )
v121 )
P6CCIt (19~ (KT'c~Y-1
7((SYMN21(T,J),1=1,2),J=1,vrREoS)
,6O,
CCD (1 1,,; 1 2 (17
)(SY ! 1;2 ( 7,1J),T=, p2 ),J =I,WF REQS)
T)A 1 1 -'m2w,2) ((SY!02N2(T,J),T=1,7),J=1,fwrREOS)
1 0
r Cr I'F (KT'PTri-1l) 700,6T0,650
6 10
PrAp ( 1011,17NE ((SY*N
T ,J ),T=1,2),J=1I, ' FPEOS)
v) n (
)N(('PY=N
(1,J),T=1,2),J=1,EFREQS)
(-
TO
PrEAD (10'17F2n)
((cYy2N (TJ),I=1,2),J=1,vFREQS)
7 I0 TF (KWvrEX-1) PO00,175,75
71C PAD (10'ISyN
) (()3Y1
(T,J),T=1,2),J=1,
Y
(FREQS)
P2AD ( 1Of ')S'N 1
) ( )(1NI (TvJ)=1f2)J=IvFE
S
A(1**SVN 2N ) ((SYM2 (,J),T=1(,),J=1,FE()
80 P -A D ( 10 ' "M N
)
(rM
(IJ),T=
I,2),J=1I, VFP 1QS)
RUAT
OTATIONAL MILTIES:
C
10'0 nDY 2N2
IF
11(O C
NFP=1,NrPEQ
(KTP4EI-1) 1400,1100,1l0
=(.*SYN(1,RFR)-12.*SYN(1,NFP)+.*N22(1,NF
P)-2.*ELT!)
2(2,NFP)+SYw!2N2(2,FlFR))/(4.*rELTX*DFtTXT)
SY M 7N7(1,FR)= CO
SYM2N2(2,NFP)= QUAD
14'j IF (KTPFEY-1) 1800,1500o,10O
1500 Cn
= (3.*SYNN(1,?FR)-4.*SYNN(i,NFP)+SYW2(1,WFR))/(2.*DELT
SYIA2N(1,NFP)= Cl)
SYNf2N(2,MFl)= OUAD
1190 TF (KWNrX-1) 2000,1q0o,1900
3*YN1.F)4*YN(,NP+YN(,F)/2*ETI
i9oo Cn
-
- 88
)
2(1,NIFP)+SY,12N2(1,NFP))/(4.*DE.LTX*DFT-TXT)
OUAD=(.**YmN(2,NFP)-12.*SYNW1(2,NFP)+3.*S(MN2(2NFR)-12.*SMLN(2,
-
,68
) . aA.j^
Zh
Ilk~i.
Zii~(
i
L-4 o I soAdih
uia
aio)
sz*'~ s
17~I
0 iEi1 0hc 'wa i t- 0 L L - i H I Ji li J
~l
z-'s'vLi
tLhGiid odt*
0q'04!UkY 'Si
:)3S IN AAO
~id
hii
Aok1'I/m
1.i
GN.At
'Gi
-
3k
L+dk
(..~1L0CtUo
.
0UIu
)J
;,LlIa>uW
Al*
L~li Zkj.
hA)J~V
O'OO'OOWUE (L-)%hidI)
aI
u1
I''L),w
03ajv
',0,LAMAG,0,80)
*Tq/F MCTITTY MAGN., DE PE 1/ NT SEC
FPEQUENCT, HZ
CALL VCVE (
',0,tAPf,0,R0)
DEC.
TH/F MOBTLTTY PHASE,
*
CALL PICTP(SY2N,1,LAMAC,THFS,-1,NEPEQS,0,-1,-1)O4,-2,FMX,1)
IF (NPTHF-1) 3500,3500,3460
3460 CALL PTCTP(SYMN1,2,LAPH,PHS,-2,NFPEQS,0,-1,-2004,-2,FA,1)
3500 Ir (NPTqM-1) 3700,3600,3600
365r NFP= 1,WFREQS
36^0 T)
AmnR2=SYF2N2(1,NFR)**2 +SYF2N2(2,NFP)**2
AmAGN= 10.*ALOG10(AqOP2+1.E-30)
SYm2N2(2,NFP)= ATAN2(STM2N2(2,NFP),SYM2N2(1,NFP))*57.29578
3650 SYM1N2(1,NFP)= A'AGN
FPEQUENCY, HZ
9
CALL VCVE (
',rLARAG,0,80)
*TT/r qC'TTTTY FAGNr., ,P PE 1/ NT M SEC
FDEQUENCY, H?
CALL %0VE (
DEC.
fptpH,0,0)
*
TH/M MOPTLITY PHASE,
-
90
-
CALL PTCTP(SYM1N2,1,LAMAG ,THMS,-1,NFPEQS,0,-1,-100(,-2,FRA!,1)
TV (NPTHM-I) 37m0,370r,3660
3660 CALL PTCTP(SYM2N2,2,LAPH,37r% CALL rXTT
FND