HUGH 1969 B.S., Boston College
advertisement

. ON MEASURING OCEAN PHENOMENA
FROM SPACE
by
HUGH MICHAEL BYRNE
B.S.,
Boston College
1969
SUBMITTED IN PARTIAL FULFILLMENT
OF THE REQUIREMENTS FOR THE
DEGREE OF MASTER OF
SCIENCE
at the
Massachusetts Institute of
Technology
January,
1974
Signature of Author.
Department of Meteorology
January 15,1974
Certified by........
Thesis Supervisor
Accepted by.........
Chairman,
Lindgren
Departmental Committee
on Graduate Students
%
FEB
-0 R
IES
Table of Contents
page
4
Overview
7
Survey of Geophysical Phenomena
19
Satellite Borne Sensors
25
Orbital Considerations
33
Resolution
36
39
44
56
60
Mappinig
37Statistical Re-pr-esentations
Geoid and Tides
Gulf Stream Arga
Indian Ocean Response to the Monsoon
Antarctic Circumpolar Current
62
Summary
63
Appendix A Sea Level and the Geoid
65
Appendix B Representative Observations
66
Appendix C Calculation of Sample Densities
68
Appendix D Computer Program for Orbital Simulation
73
Bibliography
-2-71-
I-
M
E,1=
11111
..
_
-10-M-1-1,
-,FIGURES AND PLATES
Figure 1
Figure 1-2
Wavelength-Period Diagram of Geophysical
Phenomena
p.6
Dynamic topography of the Sea Surface in
the Arabian Sea for Summer 1963
p.10
Figure 1-3
Sea Surface Dynamic Height Anomaly relative
to the 2500dbar level in the Antarctic Ocean p.11
Figure 3-1
Satellite orbital Geometry
Figure 3-2
Satellite Period vs. Satellite Mean Altitude p.27
Figure 3-3
Sub-orbital track of high and low inclination orbits
p.29
Figure 3-4
Ground Coverage of 780 inclination orbit
p.29
Figure 3-5
Gulf Stream Meander Region
p. 4 3
Figure 3-6
Temperature Structure in a Cold Core Ring
p. 4 5
Figure 3-7
Schematic Relief Across the Gulf Stream
and a Meander
p. 4 9
Figure 3-8
Infra-Red Image of the Gulf Stream Meander
Region
p. 5 0
Figure 3-9
Derived Power Spectrum for Geoid Profiles
p.51
Figure 3-10
Dynamic Topography of the Indian Ocean
p. 5 7
-3-
p.26
OVERVIEW
Oceanography has been and is now largely a science of
men and ships.
It has been confined for the most part to
measure occurrences and dynamical phenomena that are limited
in time and space by scales characteristic of these components.
The new frontiers opened by recent advances in space
flight have now passed from their glamorous birth to a working
adolescence; as such they offer new tools to earth scientists,
including oceanographers.
The importance of the satellite in oceanography lies in
its ability to survey large areas rapidly so as to provide,
for the first time, almost simultaneous pictures of the state
of an entire ocean.
With sensors built to measure oceano-
graphic and meteorological data sufficiently accurately,
prediction of the future behavior of the ocean as well as
long-term weather forecasts, should be possible.
Using orbiting vehicles the earth sc.ientist can "see"
whole oceans and global dynamical systems.
The use of
orbiting sensor platforms will allow more accurate measurement of large-scale ocean dynamics.
The speed and synoptic
coverage will fill the gaps in conventional sampling systems
and very likely disclose new dynamical phenomena of space
and time scales previously unimagined.
The use of orbiting sensors to measure oceanographic
phenomena encompasses two problems, detection and resolution.
The phenomena must have a surface characteristic which is
measurable with an orbiting sensor, and the system of sensors
must sample often enough in space and time to resolve the
phenomena to a useful degree.
Measuring with orbiting sen-
sors does not preclude using ship and aircraft data, but extends and compliments it by making possible extensions in
time and space of conventional oceanographic measurements as
well as adding a previously unobtainable context in which to
place the more detailed ship measurements.
Detection is accomplished be sensing a different measure
from the norm or a relative change in space or time, or both,
of the characteristic being measured (i.e.,temperature gradient).
Implicit in the detecting is the definition of the
norm against which the observation is made and the fact that
the observation is representative of the phenomenon measured.
Appendix B discusses representative observations.
Two potentially significant measurements useful to oceanography are surface temperature and the height of the ocean
surface with reference to mean sea level.
The rigorous
definition of sea level and its relationship to geopotential
surfaces are treated in Appendix A.
Both surface temperature
and surface topography can be measured from sensors in orbit;
both will be treated in detail.
-
hanges in J2
Free Periods in North
Atlantic
105 KM-
Tides S2
Atmos.Rossby Waves
Frontal Passages-
2 K
Variations in Steric anomolies
02
'
Ice Ages
H
Hurricanes
Mnn
Re g im
Variations in ACC
Gulf Stream Rings
ulf Stream Meanders
Free Periods in ACC
Atmospheric
Pressure
Effects at
Sea Level
100 KM
Geoidal
Waves
Sea Level Var.
e
1 KM * Surges
100 M
-
Gravity Waves
Continental Drift
DAY
103 YR
YR
TIME
FIG 1
10R
--- iIsland Arc and Trench Signitures
.
ON MEASURING OCEAN PHENOMENA FROM SPACE
HUGH MICHAEL BYRNE
SUBMITTED TO THE DEPARTMENT OF METEOROLOGY IN PARTIAL
FULFILLMENT OF THE REQUIREMENTS FOR THE DEGREE OF
MASTER OF SCIENCE
Remote sensing of ocean phenomena from satellite borne
sensors is examined. It is shown that many phenomena
should be resolvable with these devices.
The possible formats of remote sensing data is discussed
It is shown that mapping is more useful than statistical
summaries for dynamical ocean monitoring. The sampling
criteria necessary for resolution of some ocean phenomena
is developed.
It is shown that some of the phenomena cannot be resolved
with a simple altimetric satellite, but a synergistic
combination of several sensors including VHRR and altimeter can resolve western boundary currents and the response of the Indian Ocean to the monsoonal wind changes.
Comparisons are done to show that ships and even aircraft
cannot provide the necessary coverage to adequately resolve
oteanogrTphic features on these scales.
The large dependence of satellite monitoring systems on
orbital parameters is shown with an example of how orbital
inclination affects the total sample density.
Thesis supervisor:
Title:
I oilwe""
Dr. William Von Arx
Oceanographer and Senior Scientist
PAR.
.7
SURVEY OF GEOPHYSICAL PHENOMENA
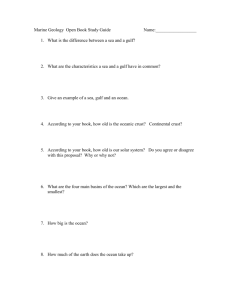
The dynamical phenomena in Fig. 1 are those which have
a signature on the ocean surface allowing detection of their
spatial and temporal time scales.
The spatial period along
the vertical axis is the characteristic linear measurement
or scale associated with the phenomena.
The temporal period
is the time for one cycle of each of the phenomena.
In the
case of moving atmospheric or ocean dynamical systems (i.e.,
hurricanes or cyclonic rings) it is the time required for the
event to move a distance equal to its characteristic spatial
dimension at its characteristic speed.
In general, the time
and spatial scales are those commonly followed in the literature.
The signatures due to the density inhomogeneities in
the earth have the longest temporal and spatial periods
Information on the geoid
will be gained
using the residuals of orbit perturbations
(Gaposchkin and
(geoidal waves).
Lambeck, 1970) and the data from satellite-borne altimeters
(Lundquist, 1968).
Use of the altimeter data for improving
the representation of the geoid accepts the concept that the
open ocean is an equipotential surface to an accuracy of a
few meters.
Determination of an accurate geoid is important to the
question of density distribution in the earth and of
1
See Appendix A
paramount importance to oceanography because it is the norm
used to define mean sea level.
Because of the lack of knowledge of a high resolution
geoid over the oceans, the first step in analyzing altimeter
data will be determining the geoid.
Those differences be-
tween sea level and the geoid that are time-varying can be
distinguished by repetitive altimetry.
By filtering out the
variations of the physical ocean surface, one can describe an
ideal mean sea level.
This is a simple direct way to isolate
factors such as sea state and tides.
This method will also
work for current systems with sufficient spatial variation
that a sample taken over several periods of a fluctuation
(i.e.,passage of several meanders) could separate the oceanographic contribution from the geoid.
However, a different
method will be needed to identify the more stable oceanographic
features.
Effects due to mean climatological influences such
as the water density distribution associated with meteorological centers of action and the effects of return flow in
the major ocean gyres are so nearly permanent that variations
in time are insignificant.
An independent method for deter-
mining the geoid in these areas will be necessary.
The ocean-
ographic contribution in these areas is characteristically
on the order of 10cm to 1 meter departure from the geoid.
Determination of a mean sea level is again possible, but
there will be some systematic deviation from the geoid.
Afterward, monitoring the deviations of the sea surface can
be done to the accuracy of the altimetric measurements.
changes should be detectable using this approach.
Any
The length
of the sample necessary to define such a mean sea level will
depend on the accuracy desired.
Sea Level Variations
Sea level variations over seasonal and yearly cycles
are the next ocean feature one sees moving left in Fig. 1.
Though not of immediate concern to the general circulation
of the oceans, detection of variations from orbiting sensors
in the deep ocean would be useful to solid earth studies of
mass distribution and apparent changes in moments of inertia
of the earth ocean atmosphere system (Kozai, 1970).
Pattullo
(1955) investigated some of these variations using coastal
tide records.
Measurements of the deep ocean tidal eleva-
tions or mean sea level far from coasts would give new information to this old problem.
Antarctic Circumpolar Current
The ACC has shown significant temporal variations in
position, intensity and transport.
Gordon (1967),using data
from hydrosections, has shown the transport to be of the order
of 200 Sverdrups.
However, more recently Mann (1972), using
direct-current measurements in the Drake Passage, has given
evidence that the 200 Sverdrup figure may be off by as much
as 50 -per cent.
10
-
f--I----
------
i
-
10*-ALL4
40.
60
50.
S
7
fafter
Duin
DYNAMIC TOPOGRAPHY OF THE SEA
SURFACE IN THE ARABIAN SEA FOR
SUMMER 1963
Fig.
1-2
after Duing
0
Is
H
H
SEA SURFACE DYNAMIC HEIGHT ANOMALY RELATIVE TO THE 2500
DB
LEVEL
AFTER GORDON
FIG 1-3
1.
-
& BYE
1973
- - - __0
Moreover, McKee (1971) has noted from comparison of
tidal data across Drake Passage that the variation in sea
surface slope, if interpreted as due to barotropic set-up
from currents in geostrophic equilibrium, might account
for as much as 50 per cent of the estimated transport of the
ACC.
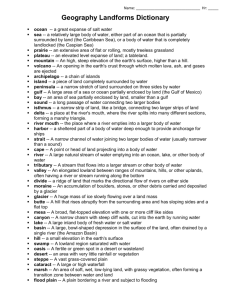
Gordon and Bye (1973) have recently compiled a study of
the circumpolar region and find intense currents with sea
surface slopes equal to one half the slopes of the western
boundary currents and surface topographic signatures which
they interpret as Rossby waves.
Fig. 1-3 shows at AA', BB',
and CC' the regions of largest slope as well as the wave
patterns between 950 and 1300 west.
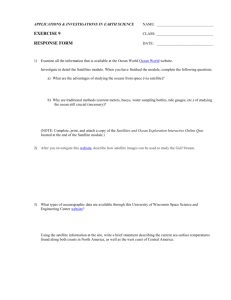
Monsoon Regime in the Western Indian Ocean
The area of the monsoon currents in the western Indian
Ocean has large variations in sea surface temperature and
dynamic topography from season to season (Bruce, 1968; Ding,
1970).
These variations are as large as 0.7 dynamic meters
with spatial wavelengths of approximately 900 km.
These variations are greater on the western than eastern
side of the basin.
Duing has shown that the dynamic height
variations sometimes look like a series of hills aligned
eastward across the Arabian Sea (Fig. 1-2).
There are also large surface temperature gradients across
the region 50N to 100 N which reflect the boundaries between
the east-flowing Somali Current and a more northern loop of
current during the summer monsoon (Bruce, 1965).
The temporal period of change for the monsoon is very
close to a year with some minor variations from year to
year.
Free Periods in the North Atlantic and the ACC
Theorists have long recognized that rotation of a globe
covered with a thin layer of uniform depth and density not
only introduces changes in the frequencies of long wave
standing oscillations which exist on the globe in the absence
of rotation (oscillations of the first class), but also
converts certain motions which are steady in the absence of
rotation into long period oscillations (oscillations of the
second class).
In the terrestrial ocean, waves of the first
class are usually called tidal waves, waves of the second
class are nearly in geostrophic balance and may therefore
appear as a moving current system in the ocean.
The ordinary
methods of ocean current determination (dynamic computations)
reveal only the internal mode of second class motion.
The
external mode of a second class motion must appear as a
relatively long period vertical oscillation of the freesurface; a barotropic Rossby wave.
The periods and wavelengths shown are those computed
for a a plane ocean by Arons and Stommel (1956). They are
probably less than realistic in view of the more recent
work of Rhines (1969) and others; however, they will serve
as representative models.
14
Tides
The spectral density of sea level variations at frequencies below 1 cph only exceeds the order of 1 cm 2 /cph
around the diurnal and semi-diurnal tidal peaks and the lowfrequency peak going toward 0 cph (Munk and Cartwright, 1966).
The variations combined with the astronomically derived knowledge of the frequencies of the discrete line part of the
driving forces make feasible the exploration of the tides
using sea surface altimetry.
Zetler and Maul (1971) have shown that advances could
be made in ocean tidal prediction with altimetric accuracies
of order 20 cm to 1 meter.
On the other hand, to compute from a global sea level
elevation the work done by the moon and the sun on the sea
(ocean tidal dissipation), very precise observations ±
in
phase, ±2 cm height would be necessary to detect any significant tidal dissipation outside the ocean (Munk and Cartwright, 1966).
Excluding noise, bias and orbital effects, the altimetric signal is the sum of three major effects:
time invariant
equipotential
topography
(geoidal waves)
+
dynamic topography of
the ocean
+
tidal
elevation
One option is not to attempt to separate the -global
tidal field from the long series of altimetric data, instead
use numerical models to calculate the global tide as a
15
function of position.
The tidal contribution can then be
subtracted from the data.
Hendershott (1970) has developed
some of these models.
All of the phenomena discussed above are shown by
changes in the geocentric radius of the ocean surface either
as a function of position or more often position and time.
The next group of physical features usually have other
characteristics in addition to the change in surface height
useful in identifying them, surface temperature gradients,
changes in color, surface roughness, etc.
They are also of
smaller scale and shorter period.
Gulf Stream Region
The Gulf Stream where it departs the continental shelf
north and east of Cape Hatteras, has several striking surface
characteristics which mark its presence.
It is generally
warmer than the water masses on either side of the flow, the
slope water to the north and Sargasso Sea to the south; it
is of different color than the slope water, the northern edge
being easily discernable.
Calculations from hydrographic
data predict a rise in the ocean surface to the right looking
downstream.
In an arbitrary local system the geostrophic
relation is:
? (2c WS')
o-
( 'Dt
2w
sin> *
/4'
in mid latitudes
where
16
4 is the angular velocity of the earth, and
geographic latitude.
f
is the
For velocities characteristic of the
Gulf Stream,100 to 250 cm/sec,we have;
is the width of the stream -'-100 km.
.There is
a surface slope of- 1 meter in
10 7 cm or 100 km.
S-track (1953) did an extensive study on the coincidence
of the maximum sea surface temperature gradient and the
position of the 100 isotherm at 200 m (defined by Fuglister
as the axis of the flow (Fuglister, 1963)),
and found them
to be within 10-15 km most of the year.
Surface temperature is an obvious, easily measured
indicator of the Stream position, although Luyten (1973) has
pointed out that, although a large surface gradient often
accompanies the Stream path, occasionally large surface
gradients exist independently, north of the Stream in slope
water.
The Gulf Stream offshore is believed to be approximately
100 km wide and several thousand km long; however, there are
1arge, sinuous turns in the axis of the Stream called
meanders (Fuglister,1963; Hansen, 1970) about which relatively little is known.
The meanders appear on Fig. 1 with scales of 40-300 km
and periods of 10-40 days.
These show themselves as changes
in the position of the stream axis.
Hansen )1970) has
measured their position over several months and they are
thought to propagate at a rate of 4-25 km/ day.
Occasionally meanders become very large in their cross
axis amplitude, pinch off, and form current rings to the
north or south of the stream axis (Fuglister 1971).
Meanders, because they are waves on the Gulf Stream,
have all the characteristics of the Gulf Stream mentioned
above.
Rings also have the same characteristics.
Immediatly
after the formation of rings the surface temperature gradients
and geostrophic slopeof the surface topography are both present.
Cold core rings south of the Stream are low to the center
and warm core rings to the north are higher in the center.
The surface temperature signiture
rapidly disappears
(Fuglister, 1973), but the dynamic surface signiture should
persist as long as there is appreciable velocities around
the ring.
Atmospheric Pressure Changes
Atmospheric pressure changes at sea level are most common in the form of an inverse barometer effect which keeps the
pressure on the ocean floor constant.
change in sea level of
This corresponds to a
1.01cm/mb of change in atmospheric
NOWIMPMpoop"
I I -WqPTIP"MI
18
pressure.
The inverse barometer relation should hold very
well over the open ocean.
The expected range of sea level
variations could be as large as 30 cm beneath moving tropical
low pressure systems and hurricanes.
'Over regions of continental shelf the atmospheric pressure cahnges can excite resonant trapped waves which propagate along the shelf out of phase with the forcing pressure
systems (Robinson,1964;Mysak & Hamon.1969).
These resonant
waves, when small, are termed continental shelf waves, but,
when generated by a large hurricane, they can become large
storm surges (Redfield & Miller,1951).
Finally, on the lower left of Fig. 1 are surface gravity
waves.
Because ocean surfacewaves are the sum of many wave
trains propagating in many directions, it is very difficult
to measure the surface wave filed and parametrize it systematically.
Nevertheless, there is a great necessity to know
about the status of the wave field as an input to any sea
state prediction program.
The waves exhibit a departure of the ocean surface from
level and a variation in slope.
Both of these effects can
be separated by suitable spectra S(w,h) nad S(w, h).
ax
How-
ever, predicting where the energy will be at a future time
requires a direction spectra of wavenumber S(O)
Detection of all the phenomena above cannot be done with
one sensor nor even two. A multiple synergistic use of different sensors on different satellites combined with conventional surface data from ships will be necessary.
19
SENSORS
This section describes the available satellite sensors,
their accuracies and applications to oceanography.
Section 1 has outlined many ocean features which can be
detected by measuring surface signature.
These include geo-
metric measurements of geocentric radius, surface temperature
or surface temperature gradients, surface slope relative to
a level surface, microwave emissivity or surface color.
Sur-
face color is the only observable which yields information
about the composition of the water; the others all give information about the state of the water mass.
From satellite altitudes (typically 800-1100 km) the fine
surface detail at scales less than 100 meters becomes difficult to observe.
For most physical oceanographic purposes,
this is not a serious limitation.
A more important considera-
tion is the fact that the radiation measured has to travel
through the entire depth of the atmosphere.
Clouds are opaque
to infrared and visible light and accurate IR temperature
measurements are affected by the value of the atmospheric
absorption.
The chance of any vertical line of sight being
cloud free is about 40-50% (Graves et al.,
1970); the chance
of observing a cloud-free area becomes increasingly smaller
with the increase of the size of the area.
The more important sensors for oceanographic work are
the spin scanning Very High Resolution Radiometer and the
orbiting radar altimeter.
The VHRR is currently operating on
20
the NOAA-2 satellite.
This instrument measures radiation in
two VHRR channels 0.5-0.7 ym and 10.5-12.5 Pm.
It has a
spatial resolution of less than 1 km at nadir and can resolve
difference of temperatures to order 0.50 k (NOAA Bulletin NESS
Maul and Sidran (1973) estimate absolute accuracies of
35).
approximately 20 k from theoretical conditions.
The question of whether useful geophysical measurements
of the surface of the solid earth and oceans can be made by
altimetry from orbiting vehicles was first examined by Frey
et al.
(1965).
If the path of a satellite can be determined
with sufficient precision, it can provide a reference line
for a measurement of the distance to the terrestrial surface
by a radar altimeter.
This would furnish a measure of the
geometric or geopotential height of the ocean surface.
Since
Frey's work, several investigations have been made of tracking
requirements and orbital analysis (Smith,1972; Siry,1972) and
engineering requirements (Stanley & McGoogan, 1972) necessary
for implementing an orbital altimeter system.
Wiffenback (1972) has outlined an observational philosophy for satellite altimetry and its use in geophysics.
The initial instrument used for altimetry will be a short
pulse 13.9 GHZ microwave radar.
This instrument gives a nadir
measurement from the satellite position to the earth's surface.
When operating over the ocean the shape of the return pulse
gives radar height distribution of the vertical ocean surface
structure.
This can be related to the spectrum of wave height
and sea state.
21
Another more promising altimeter is the coherent microwave radar system developed recently by Brown (1973)
Coherent radar systems have the ability to measure very small
of 3 cm)
changes (order/ in surface elevation continuously over long
baselines.
Coherent radar techniques can be applied to a
variety of remote sensing observations.
In the downward-
looking or vertical-incidence mode, it will determine altitude absolute to 10 cm and relative to within a few centimeters, surface roughness, atmospheric water vapor content,
and ice thickness.
In the off-vertical mode, ocean surface patterns produced by waves, currents, wakes, or surface winds can be
observed independently of cloud cover conditions.
Also the
same radar can be used simultaneously to measure altitude
(ocean level),
sea state and ocean wave patterns.
The space-
craft radar will operate from satellite altitude and most of
the imagery will be produced using off-nadir angles between
0 and 30 degrees.
Consequently, shadowing will not have a
strong effect and change in slope has a small effect.
The coherent radar is extremely sensitive to ocean surface
roughness.
Tests have shown it capable of detecting ship
wakes and patterns caused by local wind stresses and surface
films (pollution) (Brown, 1973).
The imaging capability of coherent radar also holds the
promise of providing the means to measure the directional
energy spectra of the sea surface from satellites.
The image
of the sea surface can be constructed using the imaging
capacity of the radar outlined by Brown (1972).
The two-
dimensional Fourier transform of such an image will give the
two-dimensional spectrum of the slope distribution of the
surface, including information of principal wave direction
and dominant wave number.
All or some subset of this informa-
tion can be transmitted to the ground.
A similar technique
has been used by Stilwell (1969) for photographic analysis of
local sea conditions.
The length scale of the sea surface variations that can
be resolved using this method falls in the range of surface
gravity waves.
The ocean wave patterns obtained from the
satellite along a long baseline can be used to locate storm
and the time the
they
waves will reach distant areas of the ocean; hence,/will assist
centers, determine the rate the storm moves
in predicting sea state (Brown, 1972).
Satellite altimetry will be the most significant step
forward that will be taken by remote sensing systems. Besides
contributing to the knowledge of the geoid shape, it will
provide for the first time a remote measure of the dynamical
systems in the ocean.
Visible Color Sensors
The visible imaging of a multi-spectral scanner system
provides an additional input in the sensing of ocean phenomena.
This instrument has multiple spectral band images to
measure the radiance of the imaged area.
Sensors currently
used on the ERTS satellite have four bands,
two
in the
visible and two infrared (NASA, 1970).
These four bands show
signatures of ocean color due to variations in chlorophyll
content and suspended
matter.
The images have shown tidal
currents moving sediment in estuaries, refraction of swell
over the bottom topography and interaction of internal waves
with the bottom (Apel, 1973).
The spatial resolution of the
sensors is approximately 50 meters.
The signature of some
current boundaries and demarkation of water masses otherwise
undetectable can be seen in the color changes evident in
ERTS data (Maul, 1973). Noble (1970), using a Fourier transform process of Apollo 7 color photographs, was able to detect
swell with a wavelength of 260 meters that had decreased by
5-10% in shallow water.
Microwave Sensors
Microwave radiometry provides a technique for the remote
measurement of sea-surface conditions such as thermodynamic
temperature, ice cover, wind speed (but not direction), and
salinity.
This technique also allows various atmospheric
parameters to be measured, such as the columnar water vapor
content, etc.
Such atmospheric measurements, though inter-
esting in themselves, are needed in order to remove the
perturbing influence of the atmosphere on the direct measurement of the sea-surface parameters.
A very important point
about these microwave measurements is that they can be carried
out on a nearly all-weather basis, which is certainly not
true of competitive infrared wavelength systems.
An indi-
cation of the precision that is attainable by microwave systems
is given by Gaut et al. (1972).
The brightness temperature of the ocean Tb can be related
to its thermodynamic temperature Ts through the use of Fresnel's
laws of reflection.
Studies have shown that ATb/ATs are maxi-
mum at a frequency of 5 GHz (APL SEASAT Mission,1973).
The
presence of wind blowing across the surface of the ocean
has a measurable influence on the observed brightness temperature at 5 GHz and
hence
must be taken into account if an
accurate measurement of Ts is to be made.
The treatment of
wind effects on microwave brightness separates into two
categories--surface roughness effect with wind speeds less
than 7 m/sec and the effects of foam which is present at
higher wind speeds.
Stogryn's (1967) model of surface rough-
ness provides valuable insight into the first problems, and
Droppleman (1970) has treated the effect of foam on surface
brightness.
Measurement of emissivity variations due to changes in
sea state and leading to near surface wind speed measurements
have been attempted by several investigators
Pierson, 1971, and Nordberg et al., 1971).
(Moore and
The observed
radiometric temperature should increase by 1 to 21k per m/sec
of wind speed.
Additionally, the high emissivity of foam
caused by whitecaps and the approximately linear relationship
of foam cover to wind speed above 8 m/sec makes the radiometers
a good wind-speed indicator for high wind conditions.
Micro-
wave scatterometry as shown below is a better anemometer for
low wind speeds.
25
The microwave scattering cross section function a versus
nadir angle e changes as a function of wind speed (APL, 1973)
By measuring the change in the cross section function,
the near-surface wind speed can be obtained.
The microwave
scatterometer is not expected to respond to wind vector
direction.
Its sensitivity to wind speed is expected to be
restricted to values less than 20 m/sec.
The full range of
speed may be obtained by combining the data with the microwave radiometer.
This instrument is currently being evalu-
ated on the Skylab mission.
Although microwave sensors have the advantage of allweather capability, the trade-off is in resolution of the
surface spot size due to the relatively long wavelengths used.
A two-meter antenna needed to give a 1-degree beam width at
3 cm wavelength gives a resolution of 20 km of the ocean for
an 1100km orbit.
For surface temperature mapping of the
entire ocean this is acceptable, but it is marginally useful
for the demarkation of current boundaries.
ORBITAL CONSIDERATIONS
Satellite orbits used to make geophysical measurements
serve a dual role.
Most obviously, they determine where and
when a satellite will be above a specific point on the earth;
additionally, changes in the orbital parameters provide information about the shape and density distribution of the earth
atmosphere system.
The field of satellite geophysics is de-
voted to using the orbital parameter data to gain insights
into the earth's gravitational field (Kaula,1966).
The analysis of satellite orbit dynamics follows well
established principles of celestial mechanics (Sterne, 1960;
Kaula, 1962).
To describe the motion of satellites in space, geocentric
coordinates are used (x, y, and z, Fig. 3-1) with the x,y
coordinates in the equatorial plane.
The angle which defines
the intersection of the orbit with the x-y plane is known as
the longitude of ascending node Q while i is the inclination
of the orbital plane.
The form and orientation of the ellipti-
cal orbit in its plane are specified by the eccentricity e, and
the argument of perihelion w.
The size of the orbit is usually
given in terms of mean distance a, which is the mean radius of
the orbit.
Focus,
Orbit
Equator
T
QNode
Equinox
x
Fig 3-1
There is an immutable relation between satellite height(a-R)
and orbital period.
Fig. 3-2 shows how satellite period
increases with increasing height.
The satellite circles the
earth in an orbit whose orientation is nearly stationary with
respect to the fixed stars.
The earth rotates within this
orbit with 24-hr period or 150 of long. per hour.
Thus a
satellite whose period is 1.5 hours crosses the equator 22.50
36000
27000
16000
L'l
9000
1800
]-
INSET
PERIOD
PERIOD
SATELLITE PERIOD
(INMINUTES)
VERSUS SATELLITE MEAN ALTITUDE
FIG 3-2
(KM)
further west on each successive orbit.
If a requirement
were to view the earth completely every day, the instrument
would have to have a field of view of 22.50 or 2250 km.
From
Fig. 3-2, we know that the satellite altitude is only 180 km;
therefore, the look angles exceed 800.
The observations made
at such large oblique angles would be of little value.
The
data obtained by a sensor viewing an area at large oblique
angles is seriously degraded.
This characteristic is one of
the important parameters affecting instrument design and orbit
selection.
An excessively high orbit also is unsuitable
because it circles the earth so slowly that again large angles
to the midpoint between passages occur.
The best compromise
between these effects, for a satellite which is to view the
whole earth, is an altitude of 1000 miles (Herbert, 1967);
however, for the other types of investigations of different
geographical extent, one may find other optimal altitudes.
The orbits of interest to remote sensing are nearly
circular.
Circular orbits have a near constant altitude and,
therefore,corrections to data that might be due to altitude
variations would be minimized.
In addition to altitude, the other orbital parameter of
interest is the inclination of the orbital plane to the
equatorial plane (see Fig. 3-1).
The inclination determines
the maximum latitude of the subsatellite track.
Fig. 3-3
shows the subsatellite track for one period for orbits of
various inclinations.
Fig. 3-4 shows the ground track of
.Dots represent 1 minute spacings along the orbital track
A
e5e
I
*
e
C
e.e....
30
..
.
.
00
~~. 7, o
3,-4/
300
900
900
300
00
30 0
90
3-3
several periods of a high-inclination orbit.
It is obvious
that the inclination determines the total coverage of any
particular satellite system.
Inclinations less than 90* are called prograde orbits;
inclinations greater than 900 are called retrograde.
in longitude of the ascending node,
for the two types of orbit.
The change
, has a different sign
Prograde orbits, as a result of
gravity differences between the earth's equatorial-bulge and
the flatter polar regions precess westward from day to day.
This is an
Retrograde orbits have an eastward precession.
important consideration if the orbits are to be synchronized
with the motions of the sun or moon.
Note that
=l 0 /day (east) defines the condition for a
sunsynchronous orbit--i.e., one which remains at a fixed
orientation with respect to the earth-sun line.
This orbit
always sees the ground at the same local time and would make
it impossible to measure solar tides.
A crucial question is the pattern of ground track
coverage achieved by the various orbit possibilities.
Although
the parameters are all interdependent, the critical quantity
in determining the ground track is the altitude (i.e., the
orbital period).
In the altitude range 300 to 1100 km, the
orbital period goes from 101.05 to 106.6 minutes corresponding
to a range of 14.25 to 13.50 orbits per day.
Thus, one can
select ground track patterns which repeat daily, every other
day, every third day, etc., and,additionally, one can control
IN i Will -g
'RI"I
to some extent the rate at which the basic pattern moves across
the surface.
It is not useful here to say exactly what type
of orbit be specified, but to point out that care must be taken
to avoid getting locked into repetitive patterns which may
leave large holes in the coverage.
There are four general classes of orbits:
polar, high
inclination, low inclination, and equatorial.
have prograde or retrograde configurations.
All classes can
Polar orbits
have the advantage of total earth coverage and are used for
meteorological satellites.
High inclinations 781 >
i >
450
cover all of the earth except the polar regions and have the
advantage of denser sampling in the area covered.
Low inclina-
tion orbits are useful if the phenomena is obviously in the
owe-r latitudes and one wishes to trade sample density for
total earth coverage.
Finally, equatorial orbits have the
unique capability of being geosynchronous;that is, when the
orbital period is 24 hours, the satellite is stationary above
some point on the equator.
Different configurations of geo-
synchronous satellites give an uninterrupted sample of the
tropical and subtropical earth surface north and south of the
equator.
Systems of relay satellites in geosynchronous orbits
allow continuous tracking and relay of data from satellites in
lower orbits (Siry, 1972).
It is important to point out that use of an orbiting
platform to carry sensors is dependent on knowledge of the
satellite's orbit.
Because there are only a limited number of
ground tracking stations, there are times when a satellite
- __
- .
-
I--,
. 1,
-
1
-1
.
_7
-_-
_
WWOM
01%-MIN,
M9 MR-
I
32
orbit cannot be measured directly; therefore, accurate knowledge of its position and altitude depend on accurately
knowing the orbit which depends on knowing the gravitational
field.
By far the easiest way to measure the earth's gravitational
field, on the scales which effect satellite orbits, is with
satellites.
If the earth were a uniform sphere, with corres-
ponding spherically symmetric gravity field, satellites would
describe elliptical orbits about it, according to Kepler's
Because of departures of the geopotential field from
laws.
the spherical case, the orbits are perturbed.
If the geo-
potential is expanded in spherical harmonics (Kaula, 1966),
observations of the actual orbits corrected for effects of
air resistance and radiation pressure can be used to determine
the coefficients of the expansion.
The coefficients can be
used to calculate the surface gravity field and geoidal
relief
(Gaposchkin and Lambeck, 1970).
It must be emphasized that satellite orbit perturbations
are a particular transform of the spectrum of variations in the
surface gravity field.
Orbit perturbations are the result
of an effective low pass filter acting on the surface gravity
field.
Different types of satellites (drag free, passive,
altimetric) can selectively examine different parts of this
spectrum.
However, it is the low frequency, long spatial
wavelength contributions which most effect the orbit parameters.
The acceleration field at satellite altitudes damps
as a function of altitude and wavelength according to Kaula (1969)
33
(ae/a)k+ 1
k =
2 TRae/A
X = wavelength on
surface
ae = earth radius
Long wavelength, relatively small surface anomalies such as
those over ocean basins are more effective than shorter,
more intense anomalies (i.e., island arc-trench anomalies)
in disturbing satellite orbits.
RESOLUTION
The resolution of geophysical phenomena is complicated
because the events vary in time and space.
The resulting
signatures, as can be seen from Fig. 1, have common time and
spatial scales.
This section will outline how combinations
of sensors and orbits can resolve some of the phenomena.
Technical limitations will not be considered in examining the
resolution problem.
Only limitations inherent in the physics
of the process and dictated by the choice of orbital parameters will be dealt with.
Many of the characteristics of time-space variability in
the ocean have been described by Stommel (1963).
He also
commented on the importance of suitable measuring to resolve
the various phenomena in the ocean.
The Nyquist sampling theorems show that phenomena can be
adequately resolved only if they are measured more than twice
as fast as they occur in space and/or time.
34
Awareness of space variability of the oceans was known
to the earliest mariners.
Early scientific measurement of
the spatial variability was limited by the mobility of sailing
vessels and limited accuracy of the measuring instruments.
Likewise, because of the long periods between observations,
an implicit assumption of temporal stationarity was necessary.
More recently, advances have been made in measuring
quickly varying ocean phenomena through the use of multiple
ship operations (Fuglister and Worthington, 1951), Bomex
(1970) and by deploying vast arrays of instrumented moorings
(MODE 1972-73).
Both of these methods come closer to measuring with the
necessary continuity in space and time needed to resolve the
shorter period phenomena in the ocean.
Also, both methods
revealed new previously unsuspected phenomena (i.e., rings
and 30-da. eddies).
The point is clear and has been made before (Ewing, 1961;
Stommel, 1963; Kaula, 1969); for both space and time scales,
every new advance in measuring capability, new and significant
insights are produced into oceanographic processes.
Whereas new insights will come from an increased capacity
to measure larger scales and shorter periods, one must not
assume that it would be desirable to measure everything, all
the time, everywhere.
Information theory shows that insertion of data beyond
the load capacity of the channel produces a degradation of the
transmitted information that is indistinguishable from the
effect of extraneous noise (Shannon and Weaver, 1964).
To
avoid overloading the processing capacity of the system,
acquisition of usable data from the whole world ocean must be
derived from appropriately chosen samples of the oceanic
universe.
The sampling plan obviously depends on the intended
use of the data.
The presentation of oceanographic data can take many
forms, such as time histories, graphs and tables.
The two
formats most useful for remote sensing are surface maps and
statistical analyses of values from discrete data points.
Maps are subsets of the data
space in which every sample unit
is represented, and the whole assemblage is configured so as
to retain the relative position of the sample units or some
transformation of the original positions (i.e., Mercator
projections).
For time varying populations, cinematographic
series of maps must be provided at intervals commensurate with
the time rate of change of the population.
Of the two, the
map is usually more expensive to produce than a statistical
model.
It is quite impossible to know whether or not the
results are worth the extra effort unless the use is specified.
Ewing (1969) has shown that the extra effort of mapping is not
warranted if it serves only as a format for presenting a statistical model in which the particular ordered arrangements of
the elements are not needed.
We will consider maps of horizontal surfaces and compare
the ability of satellites, ships, aircraft and buoys to resolve
the dynamical phenomena in Fig. 1.
36
MAPPING
The procedure used will follow the method and terminology
of Ewing (1969).
Since a map is of a specified area, its
extent A is known a priori.
The overall area is divided into
subareas a, that constitute the sample unit available and
define the spatial resolution of the map.
The resolution
wave number k is the reciprocal of the diameter of the sample
unit and N; the total number of samples is A/a.
The fre-
quency with which the map must be updated depends on w, the
reciprocal of the characteristic duration of the units of
size a.
The data rate of the ocean is then
R
=
s
Nw =
LA.
a
The rate at which the system, sampling with speed of advance,
S, and scan width, W, can measure is
SW
R_
a
a
If all the units a are to be sampled during each cycle, the
two rates can be equated and W set equal to
-.
The required
K
track distance D then is
D
S
m
r
= AK = A
and the required speed is
a
s=
AK
= A
a
a
-
-1 - -
-
-
IM In I
_"P9M R11100
---
.
For oceanographic phenomena the variation in the geographical position and the time of occurrence are equally important.
But measurements of the geoidal variations, which for human
time scales are effectively frozen, can be made at any time.
All one needs is a sufficient number of measurements to reduce
random errors.
Similarly, the tides with their constant
frequencies can be measured at random times and, with a large
enough data set, be resolved to great accuracy.
The freedom from the chronological dimension allows a
statistical sample to be used for finding the geoid height
value and in a round about manner for the tides.
*The time
variability of the ocean contribution makes it necessary to
map the ocean in space and time to adequately resolve these
phenomena and show the progression of events in the ocean.
STATISTICAL REPRESENTATIONS
Sampling theory shows that the necessary sample size
depends on the variance of the parameters, which deterinifk.tihe*phenomena and the required precision of the results.
For'
estimating the most likely value of any quantity, the configuration of specific data points is not required; only a
subset of the points need be included so the effort is less
than that for mapping.
This is especially obvious when one
remembers that it is a four-dimensional sample space that we
are dealing with, and being able to take data from different
points in time without regard for where makes the phenomena
easier to measure.
Knowing the distribution and variance of the variable,
calculating the sample size necessary to determine the
requisite information is straightforward (Bendat and Piersol,
1966).
It is equally simple to compute from the time variance
the frequency with which the sampling must be repeated and
the length of the necessary record.
In contrast to a map model, it is possible in constructing
a statistical model to limit the sample size by specifying the
limit of acceptable error of the estimate of the mean L.
The
estimation of an interval, as opposed to a single point value,
which will include the parameter being estimated with a known
degree of uncertainty is a more complete and meaningful
procedure for estimating parameters of random variables.
For instance, at the 95% confidence level, we may put
L 2ax
so the sample size
n = L- 2
a
4a 2
is the standard deviation of the sampled population.
The standard deviation is not known, of course, in advance.
It must be either estimated from previous studies or from the
range of the samples measured.
Sampling plans contain an
implicit assumption as to the variance,and it is better to
express this explicitly if only as a precaution against overconfidence in the interpretation of the data.
If the sampling
"am.
III-INNIVANNIN
IN
program is repeated or is long enough so the samples can be
treated as two independent data sets, then the variance
a2 of
one can be estimated from the sample variance S2 of the other.
The search speed of the measuring vehicle depends on how
large a sample is required, how the samples are chosen, and
One must also assume that
how quickly they must be measured.
the selection results in a representative sample
When the search distance is defined in terms of the desired
number of samples with some average separation approximately
equally spaced, the track distance is
D
=nd =2A
and the required speed
s
r
-
2a
L
-
/A
,
o
Comparisons show the ratio of track distances for sampling to
that of mapping is
Ds
Dm
=2a
LK/A
Turning to specific phenomena, the first to be treated
will be the geoidal waves.
three groups by wavelength.
Geoid waves can be separated into
Long waves with X > 2000 km,
intermediate waves 2000 km > X >
X < 200 km.
200 km, and short waves with
From Fig. 1, it is obvious that the altimetric
1
See appendix B about representative observations.
40
measurements will see a combination of geoid, tides, oceanographic phenomena and atmospheric response.
In determining
the geoid, all of the other contributions to the signal are
treated as noise.
The characteristics of the noise are
important in determining the size of the data sample necessary
to represent the geoid to any given accuracy.
Tidal elevations will contribute a large amount to the
error signal.
But tidal contributions are not random noise.
They are summations of nearly sinusoidal components.
Sinusoidal
data are those types of periodic data which can be defined
by a time varying function
x(t) = X sin(27rf 0 t + 0).
X = amplitude
f
= cyclical frequency
0 = initial phase angle w.r.t. the origin in
radians
x(t) = instantaneous value at t
Sinusoidal data have line spectra.
Complex data consist of a static component and an infinite
number of sinusoidal components with amplitudes Xn and phases
On*
Complex data are those types of periodic data which can
be defined mathematically by a time-varying function whose
waveform exactly repeats itself at regular intervals such that
x(t) = x(t±n T )
n = 1,2,3
TP = period
The number of cycles per limit time is called the fundamental
frequency f1 = f 0*
With few exceptions in practice, complex data may be
expanded into a Fourier Series according to
z~l~I
k-
1T
n -.
t o0 ,00
'' ..
.J
S
IJ13,l
Alternatively, the Fourier Series may- be expressed as
y~o
57
)7)(23
Zetler (1965) has shown how tide observations at random times
for the components M 2 , N 2 ' S2' kl' 02, and zo (a fixed datum)
may be analyzed using Fourier analysis.
This type of analysis,
when applied to altimetric data, would allow the tidal contribution to be calculated and subtracted from the signal, the
residue would then consist of
geoid + atmospheric response + surface topography + noise
The atmospheric response is fairly small over the ocean
(Hamon, 1968), and can be calculated from synoptic weather
maps.
Separating the remaining constituents can be done by
examining altimetry records taken at different times.
variations in the geoid are extremely slow (Fig. 1).
Time
It will
be possible to extract the time varying features due to
oceanographic effects.
This will require substantial data
sets taken over the lifetime of the altimetric device.
Also,
a different method than time-averaging will be needed to
separate the more permanent (periods >
features from the geoid.
1 year ) oceanographic
Surface gravity measurements (Vincent
and Strange, 1973) or solution of the downward continuation
problem (Chovitz, 1973) offer alternative methods of finding
the geoid in the presence of permanent oceanographic signals.
We will confine attention to those areas where the ocean
phenomena are varying with periods less than one year.
In
this case the signal, if averaged over two years, should show
the mean to be the geoidal value.
Eustatic changes in sea
5 0
400
300
GULF STREAM MEANDER REGION
Fig 3-5
44
le.vel cannot be resolved in this manner, but,since sea level
changes can be monitored reasonably well by filtering longterm tide records, this effect can be accounted for, or at
least detected.
GULF STREAM AREA
We shall consider the area of the Gulf Stream north and
east of Cape Hatteras and west of the 500 W meridian.
shown in dotted rectangle in Fig. 3-5
The area
encompasses several
phenomena of interest--the Gulf Stream and meanders of the
stream axis, rings or eddies produced when the stream meanders
break off, and the background geoid.
The measurement of the geoid will require a series of
altimetric dbservations from which the tides and other extraneous noise is filtered.
A long time series can be analyzed
for tidal signals by the methods outlined by Zetler (1972) and
Zetler et al. (1968).
We shall consider the tides subtracted
from the data; similarly, the atmospheric pressure effects will
be considered known from synoptic weather information and
filtered out.
The altimetric signal then consists of:
geoid topography + ocean dynamic topography + noise
The noisewill be considered stationary random noise, and the
ocean signal from the surface set of currents in geostrophic
equilibrium.
By averaging the error due to the noise will
oo
We
____
____
\
-40
-
_
3d
64626
MEAN TEMERATURE ('F) IN THE UPPER 200 M LAYER ON
17 JUNE 1950 CURRENT DIRECTION FROM GEK (AFTER VON ARX,1950)
Fig 3-6
-45-
eventually go to zero if the sample is large enough.
The
contribution of the surface dynamic topography will delay or
prevent the convergence of the measurement series because
the contributions from the ocean will not be truly random.
Knowledge of the particular ocean phenomena present would
simplify the interpretation of the data and make possible an
estimate of the ocean contribution to the signal.
By sub-
tracting the ocean contribution from the total signal, an
uncontaminated measurement of the geoid would then be available.
A series of this type of measurements would make it
easier to
resolve the geoid than one for which the ocean signal were not
compensated .
Alternatively, the measurement (if it was
over an oceanographic feature as a meander or ring) could be
.discounted as a ,geoid measurement altogether.
The area in question is
element is 10x10 km.
2500 x 1000 km and the necessary
From Fig. 1, the shortest period of
change in the Gulf Stream area is the meander motion with a
minimum period of ten days.
There are 2.5 x 104 resolution
elements in the mapping area, with a period of 10 days,and
sampling four times per period requires 104 elements per day
have to be sampled for adequate resolution of the ocean
phenomena.
length of 10
With the resolution size stated, this means a track
5
km/day has to be sampled.
Although
mapping
the area on a ten-day time scale
is much faster than necessary to resolve the geoid, it is
necessary to resolve the ocean features which alias the
geoidal signal.
.
my
11.1
Pw'qp
POOMPM-WIPWRIN
RELATIVE FRACTION OF THE TOTAL ORBIT SPENT BETWEEN LATITUDES
Lat. Deg.0/10
10/20
20/30
30/4d
40/50
50/60
280
.229
.291
.479
45 0
.145
.166
.197
.218
.276
60
.145
.125
.125
.125
.166
.312
740
.1041
.125
.125
.125
.125
.125
TABLE
1
60/70
.166
70/74
.104
48
With the subtraction of a good guess of the ocean effects
and the resultant treatment of the signal as geoid and noise,
the next consideration is to maximize the sample size to reduce
the error as far as possible by averaging many measurements.
The sample size will be determined by the number of passes over
a given area during some specified lifetime of the altimetric
device (for instance, two years).
At this juncture the orbital
parameters become important because they determine the fraction
of time per orbit spent between latitude circles.
It is
evident from Table I that the largest proportion of time is
spent in the latitude band just below the inclination of the
satellite.
The procedure for calculating the sample size and
density is given in Appendix C.
For the Gulf Stream region,
,the -number of samples -per 1Ox-lG-km square varies from 621/day
to 190/day, depending on whether the inclination is 450 or 740.
Given a constant standard deviation of the measurements, the
error can be reduced by averaging from 86 per cent to 65 per
cent for a 450 or 740 inclination orbit respectively.
Since the interest is mainly in oceanic phenomena and the
determination of the geoid is a necessary step in the process
of finding the ocean effects, the principle question is how to
accurately map the ocean features in the time scales dictated,
so first they can be subtracted for the initial geoid determination and subsequently for the near real time monitoring of
the ocean features.
'A resolution trace of 105 km per day exceeds the track
capacity of one altimetric satellite.
A reliable resolution
requires the synergistic use of additional sensors with greater
80 KM
1. 0,'j
SCHEMATIC RELIEF ACROSS THE GULF STREAM AND A MEANDER
FIG 3-17
ihg:%
ar.w-
tN
Figure 3-8 Infra-red Image of
The Gulf Stream
DERIVED POWER SPECTRUM FOR GEOID PROFILES
10,000
1,000
100
(D
0
10.0
1.0
0.1
0.03
.05
0.1
0.2
0.3 0.4 0.5
CYCLES/ARC DEGREE
2000
1000
500
WAVELENGTH IN KILOMETERS
FIG 3-9
200
after Brown &
Vincent 1973
52
sampling capacity.
Ocean phenomena in the Gulf Stream area
have surface temperature signatures as was shown above.
VHRR
data with a swath width of 1500 km and resolution of lxl km
in a near sun-synchronous orbit gives twice-daily coverage of
the whole earth and can accurately map the temperature
delineations of the Gulf Stream features when there is no
cloud cover.
Figure 3-6 shows the details of the temperature field at
200 meters depth in a ring with superimposed current vectors
from a geomagnetic electrokinetograph (GEK).
The heavy lines
are the subsatellite track of an altimetric satellite.
Figure 3-7 is the measured relief of the sea surface expected
Fig. 3-6
Figure 3-8 is an infraalong the track designated AA' in /.
red image of the Gulf Stream meander region taken by the NOAA-2
VHRR on August29, 1973.
Clearly visible is the east coast of
the U.S. and the remnants of a warm ring north of the Gulf
Stream and due south of Nantucket island.
The temperature signature of the Gulf Stream clearly
shows the boundary between the slope water and the stream from
Cape Hatteras to 700 W, 38 N and the boundary between the
warmer Gulf Stream and the cooler Sargasso Sea.
The most striking phenomenanis a cold, elliptical ring
in the final stages of formation centered at 68.260 W, 36.50N
with the cold filament of slope water discernable and
to the
extending/north. The presence of the ring was verified by
a surface temperature measurement of a passing ocean vessel.
* The Gulf Stream, Vol. 8, No. 8, August 1973
Greaves et al.
(1969) have shown that a five-day composite
of data taken at 12-hour intervals has a 95 per cent probability of mapping 90 per cent of the area over the Gulf Stream
with the cloud cover.
There is some degradation in resolution
using five-day composites, but the composited temperature map
greatly complements the altimetric data.
Detection of surface features which are caused by dynamical phenomena such as Gulf Stream rings, meanders,.and the
position of the stream axis can be accomplished using altimeter data alone, sensing the change in sea level as mentioned
above.
Knowing what the altimeter
is looking at would be
a large step towards interpreting the signal.
Elementary cal-
_culations show a rise in ,sea level across the Gulf Stream,
but knowledge of the crossing angle
(the angle between the
orbital track and the stream axis) is helpful in interpreting
the data, especially if one is building a sample to find the
components of the signal which is generated by the geoidal
contribution.
There is a definite spectrum of geoid variations as
in
shown in Fig. 3-9. One sees that/moving to shorter wavelengths
(200 km) the projected changes in geoid height go to zero
very quickly.
By utilizing this characteristic, we can see
that the 1-m variations in the signal with spatial wavelengths
1
Knowledge of the crossing angle can be obtained if the outline of the stream has been found using VHRR temperature data
or some other thermal sensor, and the orbital ground trace is
known.
on the order of 200 km or less are due to oceanographic effects.
This method of detection coupled with the time variation of
the ocean's dynamic height will allow separation of the two
signal components in the vicinity of western boundary currents.
The satellite VHRR systems can resolve ocean features adequately in the Gulf Stream area if five-day composites of the
surface temperature are available.
A consideration of the same problem using aircraft to
cover the area with a surface temperature survey shows that
the normal ART (Richardson et al., 1956) type of survey done
with conventional 555 km/hr aircraft allows only 55 elements
per hour or 1320 elements per day to be sampled, which is far
short of the number necessary for adequate resolution.
A non-conventional aircraft such as the Lockheed SR-71
flying at 21 km altitude and utilizing a spin scan radiometer
and ground speeds of 3600 km/hr could cover, with a 40-km
swath width, 34,560 elements per day; but again this is less
than the sample necessary for adequate resolution and does not
even consider the degradation of the sample due to cloud cover.
Ships come nowhere near the speed required to sample the
whole region.
They can, however, provide very accurate,
concentrated measurements of smaller areas of greatest interest.
The best utilization to be made of them is in con-
junction with satellite surveys, the satellite data providing
the context in which to view the more concentrated and more
accurate ship information.
55
Moorings can be constructed to measure temperature along
a vertical section at one geographical location.
The number
needed to sample with adequate resolution , 0(104),
is pro-
hibitive even if the logistical problems of placing and
servicing them could be overcome.
INDIAN OCEAN
The ocean response to the seasonal monsoon in the Western
Indian Ocean is quite a different situation from the Gulf
Stream Area.
The response is accompanied by changes in the
surface topography (Fig. 3-10) and generation of western
boundary currents off the Somali Coast (Bruce,1965).
An
analysis of an altimetric survey of the region to detect the
changes in the surface topography can be done most optimally
0
with a vehicle in an orbit having approximately 20
ation.
inclin-
However, such an orbit is very restricted in its
coverage; therefore, an example will be treated which utilizes
a 280 inclination.
The calculation to determine the sample size obtainable
from an-orbit with 280 inclination is done in appendix C.
The area covered is approximately 2200 km x 2700km, a
total area of 5.9 x10 6 km 2 . Using a resolution element
of 10 x 10 km we have
5.9 x 104 elements and from Fig. 1 we
find that a time scale of six months to one year is indicated.
For purposes of geoidal determination in the area, a
100 x 100 km resolution element would be adequate.
will be approximatly 1000 measurements over each
There
100 x 100 km
element in the course of two years with a 280 inclination
orbit.
The measurements will not all be independent since
some will be from groups taken in one passage of the satellite
across the element.
However, the groups can be averaged and
57
The dynamic topography of the sea surface for Spring
r-H
The dynamic topography of the sea surface for Autumn
Fig 3-10
after Duing
the averaged values will be independent.
The seasonal changes in the surface topography(see Fig
3-10) necessitate a sampling frequency of 45 days to adequately
resolve them.
Calculations in appendix C show that in 45
days'approximately 61 samples are made in each 100 x 100 km
element.
This gives a reduction in the scatter of the
measurement of almost 90%, implying that a +50 cm measurement resolution could be easily reduced to +10 cm by
averaging.
Determination of the geoid to this accuracy will give
a useful baseline from which to measure the seasonal changes
of surface topography due to the ocean contribution.
If the same geographic area were sampled with a satellite
in a 600 inclination orbit
smaller.
,
the total sample would be much
Appendix C shows that the decrease in sample is
close to 40%.
An alternative to the satellite surveilence is ship
or aircraft observations to measure the total area in 45 days.
Aircraft traveling 555 km/hr cover 1320 10xlOkm elements in
one day.
This would be adequate to resolve the surface ele-
vations if there existed a means for measuring geocentric
radius from an aircraft.
exist.
Presently such a means does not
In the Gulf Stream case it was surface temperature
that was being measured by the aircraft system.
In the area
of the Somali .Current such temperature measurements would
be very useful and could be made be aircraft since, unlike
the Gulf Stream meander region, the changes are thought to
be slow enough t6 make adequate resolution possible. However
the VHRR system which measures the Gulf Stream area can also
measure the Somali Current region.
Both regions can be mea-
sured with more than adequate resolution at the same time
even though they are half a world apart,
Ships could provide a measure of the surface topography
since it appears that most of the contributions to the
change in sea surface topography are reflected in the baroclinic structure in the upper
1968),.
1000 meters of the water column (Bruce
The figure 3-10 was derived from hydrographic data
taken in the usual manner.
However, several years of data
were used to construct the charts and many ships were
I
necessary to gather the data for even this quasi-synoptic
representation.
A
modern ship can average 21km/hr.straight steaming and
perhaps 384km/day while doing shallow
stations every 60 km.
(1000m) hydrographic
To cover 13,200 km/day adequately,
thirty-five ships would be needed to make the measurements.
It is obvious that the best use of ships in the datagathering system is to look closely at a small interesting
part of some large dynamical system which is measured as a
whole by satellite-borne sensors.
THE ANTARCTIC CIRCUMPOLAR CURRENT
The ACC system is largely between the latitudes of 450600 south.
Altimetric measurement of changes in surface
elevations across the ACC will show changes in the ocean flow
due to geostrophic currents and possibly detect the axis of
the current in regions of high shear (Gordon & Bye,1973).
The high latitude of the current necessitates an orbital
inclination of at least 600.
With an inclination of 600,31% of each sub-orbital
track is between 500 and 600 latitude, or 15% between 500
and 600south.
There are 2.5 x 105 10xlkm elements in the
area 500-600south.
The satellite makes 5.9 x 106 samples in
*two years or #v23.6 samples/element.
The samples at each
element are uncorrelated due to the small element size.
The
size of the sample could reduce the scatter in the mean
geoid measurement by 80%. But first the ocean contribution
be
has to Cubtracted. McKee(1972) has shown from tide records
that there is an approximately 60 day period fluctuation
in the slopeacross the ACC in the Drake Passage.
By increas-
ing the size of the resolution element to 50x5Okm, we find
there are tv 24 samples/month in each element, easily adequate
to resolve any changes in the slope across the passage.
The surface topography contribution due to dynamical
oceanographic effects can therefore be mapped.
And, once
the maps are made, the contributions of the changes subtracted to find a large sample of uncontaminated geoid measurements
61
which can be statistically treated for a best value.
It is fortunate that there is such a high sample rate
in the region from a 600 inclination orbit, since the area
is usually cloud- covered and auxiliary information from
infra-red surface temperature measurements would be difficult
if not impossible to procure.
Microwave surface temperature
measurements might be possible , but the large size of the
resolution element (100xlOOkm) would be of only marginal
significance in connection with this particular problem.
62
SUMMARY
We have examined some possible applications of remote
sensing to scan phenomena which are well known in the literature and have shown that they should be resolvable with
these devices.
We have discussed the possible formats of remote sensing
data and have shown the resolution criteria for mapping versus
statistical summaries.
Mapping is much more useful for
dynamical ocean monitoring.
The sampling criteria necessary
for resolution of some oceanographic phenomena was developed.
It was shown that some of the phenomena cannot be resolved
with a simple altimetric satellite, but a synergistic combination of several sensors including VHRR and altimeter can
resolve western boundary currents and the response of the
Indian Ocean to the monsoonal wind changes.
Comparisons were
done to show that ships and even aircraft cannot provide the
necessary coverage to adequately resolve oceanographic features
on these scales.
The large dependence of satellite monitoring systems on
orbital parameters was shown with an example of how orbital
inclination affects the total sample density.
APPENDIX A.
SEA LEVEL AND THE GEOID
The surface.of the ocean which forms a boundary between
the atmosphere and the ocean is in a physical sense a free
boundary that may take different forms at different times
responding to various internal and external forces.
boundary surface is called "sea level".
The
If the earth was
completely covered by a homogeneous ocean unaffected by
atmospheric pressure gradients and winds, or tidal forces,
the shape of the sea surface would respond only to gravity.
In such an equilibrium state there is no component of gravity
along the surface of the ocean and the plumb line is everywhere perpendicular to the surface.
This
"ideal" sea level
is a geopotential surface.
If there were no density inhomogeneities in the earth's
structure, the figure of the geopotential surfaces would be
that of a rotational ellipsoid.
However, due to the inhomo-
geneities in the crust and upper mantle,.the equipotential
surfaces do depart from the rotational ellipsoid.
The irreg-
ular geopotential surface which coincides with ideal sea
level is called the geoid.
The shape of the geoid can be considered time independent;
it is therefore the natural reference surface for physical
sea level.
A detailed geoid at sea is known only in a few
areas of the world such as the Puerto Rico Trench (von Arx,
1967), where intensive geodetic surveys allowed computations
of local geoids.
In other areas only the large-scale, long-wavelength features
of the geoid are known.
The geoid has been determined to
within + 3 meters for wavelengths on the order of 11
0
by
reduction of time variations in the orbital parameters of
satellites (Gaposchkin and Lambeck, 1970).
The shape of the earth as defined very closely by the
geoid, or mean sea level, is determined not only by the
gravitational potential V but also by the potential of
rotation.
These two potentials combine to make what is called
the potential of gravity,
W= V +
2 r2 cos 2p
where w is the rate of rotation.
It is an observed fact that the geoid is approximated
within about 10-5 of the radius vector by an ellipsoid of
revolution.
This best fitting ellipsoid is centered at the
center of mass of the earth and it is relative to the ellipsoid that the geoid undulations are measured.
Usually the
geoid height N is measured along the normal to the ellipsoid
and positive when the geoid radius is greater than that of
the ellipsoid at the same location.
65
APPENDIX B.
REPRESENTATIVE OBSERVATIONS
The use of any device to make observations assumes the
objective existence of a measurable real phenomena over the
space under consideration.
It is further assumed that the
value of the variable measured is of interest at all its
space time arguments and values at neighboring points are
somewhat correlated, so that a finite density of sampling
can give usable information about the variable over all space.
Peterson and Middleton (1963) have addressed the problem of
defining a representative observation and have given a
rigorous workable definition.
The resolution problem requires a sufficient number of
representative
-obsrva-tins
from -the -raw -data set to recon-
struct the total field of the measured variable to a useful
degree of accuracy.
For the most part we will assume that
the measurements made by the orbiting sensors are representative of the variable's value for a small volume in space
time.
66
APPENDIX
C.
The following is a calculation of the sample rate for
a 450 inclination orbit with 96-minute period.
The specific
area being referred to is the rectangle in Fig. 3-5, the Gulf
Stream meander region.
From Table I, .276 of the orbit is
between 40 -45
latitude and .138 of it-between 40 -45 N.
2
7
o
o
The total surface area between 40 -45 N is 1.6 x 10 km
There are then 1.6 x 105 10x10-km resolution elements in the
latitudes considered.
The part of the total surface area we
are interested in is 1.3 x 106 km2 or 1.3 x 104 resolution
elements, approximately 7.5 per cent of the total number of
0
o
elements between 40 -45 N.
Therefore, of the 4,000 resolution elements passed per
orbit, 4-.010 or 41.4 are on the average in the area in question.
With 15 orbits per day there are 621 samples each day taken
in the area of interest, a total of 6210 km of track sampled
per day.
Assuming a useful lifetime of two years, there will be
5
4.5 x 10 measurements made in the Gulf Stream area, an average
of 34.6 per element.
When looking at geoidal variations, a more realistic
element size is 100xlOO km; then, of course, the number of
samples increases by a hundredfold.
A similar calculation
done with an orbital inclination of 600 shows that the total
time per orbit spent between 400 and 45 N is approximately
four minutes, or .042 of the total.
This is 168 elements/orbit.
The number of elements sampled per orbit in the area in question
This implies 204.7 samples per day on the average
5.
and 1.49 x 10 in two years, an average of 11.5 samples per
is 13.6.
10xlO-km element.
.The same calculations for the same area using a satellite
0
in a 74
inclination orbit showed only 1.02 x 10
5
samples
would be taken in two years, or 7.9 per element.
Calculations for the sampling problem over the western Indian
Ocean with a satellite in a 280 inclination orbit.
From Table I the total fraction of the orbit spent between
0 and 20 N is .26.
This implies 1040 lOxlO-km elements per
orbit are sampled on the average.
00 and 20 N is
8.6 x 10
The total area between
km2 or 8.6 x 105 elements of which
5.9 x 104 are of interest.
There are then approximately
62.9 samples per orbit in the area of interest, over two years
this amounts to 5.9 x 105 samples or -10 per element.
0
inclination orbit has
5
samples in two years
10
x
3.9
and
orbit
only 37 samples per
The same area sampled with a 60
or 6.4 samples per element.
Appendix D is a listing of the computer program used to
simulate the satellite orbits.
68
APPENDIX D.
The following is a listing of the computer program used to
simulate the coverage possible with different orbital parameters.
w~w
0
~jb
A AL& ?b,
][', 1zC1F1'uG C
14 -, , 4
2.
1%C,' rAtfE
AS'; I
0
0
IVF-SJ
4
y
0
0
0
0
0
0
0
0
0
0
0
0
0
Ii
I'
16
17
,
IN
1,0
fL.t'UAL-
1
lVi
ARE-A PRf+JE7,CTtJN-LARtH
Lit ';TrACK
(,(,p)-
vJ,~ L ,I!)tiTAV
'i
FfiRTRAN (-oLi
ExTo F itkAN
tt2IS
Vj-H'IVi DCC
F)
ORBI1T.
I
e
C 0mr 9 1 IPU FF 100 C)
3iOC.) CDf"CNSIf'N L4UFFERj(3!GO:))
1.
4
C) I fSI ON -DATA1
2.
3
3.
4.
ErU!VALLNCE
kFAL
69
(0ATA, lf!FFFk1
-j
INCLINLAM)A
k'f"AL LATO.LATM LWNDoLONA
7.
0
-
9.
0
14.
15.
16.
17.
VCLj ;xTtNCLIN/k1AD1Afi
LUT1-Ll 'TARNp 'T
20COC
-I
I -oSTEPS ILL
FliRVAT(j(,INCjL1NAI0K
6~ rAt)I ANS
N
O3RBIT RATE
'
3-,Co Ff'R['ATC loX*r5.2?XF89.4)
18.
19.
I
0
C SI Nr~e>3S ( I NCL IN)
S IN Ir3' .I N, NCL IN)
--
Uir) UTSTF*~x0ST
SIft.
--.---
--
?4.
?80
29.
TI-ETAx Tr ,~kAF
C
C
CO. P(,If Tilr Af4~GLiS OF TKF 'RFIT
Cp~kuTE~ THE SINtS AND (A~b1jLS
LI uCtJ,(LA~1)A)
Lc'*CUS~(THV-TA)
3:
3
29.
c
361s
-
A= jM *R.A-
LAM
3.
-
AND TFE LARTH
M~S-tJ;-Tl4EA
-
SIr5I N C A'i.)A)
SS4( rHETA)
C'ijf'UTE THE P-NERTIAL P3
I TIVNS
oiF THE FEVICE
Yac ;-,*,") CFISt NCe-2*C I
39.
ZxASIN(Z)
4.
419
~46.
J.4
43,
C
44o
41.
10
43o
44.
luOl
40
4!QO
O
499
tc.
-CALC~aLAT,
THEaaTCEAOH--IN.
ALATxlkACIANS*Z
CATA ( I ) TSTLP
(ATAJ1+1)aALATIDATAI142)aANGLE
'~ TL )8#4000)
~--LATt -IN MIN.
Flk'f(AT(t0X,#TIME,N!TE(1,i;i5,-'o)))ATA1(4J),L)ATA1(j+l)iDATAIhj+2)D
..
..*jv:3'TAT.3*(STLIW.START),3 ..
END
L0UPLS
..--
S
I
I
I
-
--
-
.4
53.
54.
C
C
'57.
C0
(00
61
C
C
C
C
A U4,RT f'N RFAPO FRfROR
.4
0
CALL PL6TS(1dUFF#w.1(J%-C)
1 ~FR 6NID LINE-5
Q FU TIC 'ARK'
IK(iNkt. I;
I i IFT Li.U I,- L>sliN D
tNLA!.
yfiis D STRLD Y CvttRUNArr OFi PLOTTLR, URIGININ ?.1L FROM PAPLN4 Ldft
...
.
.---
--
..-
c
S
663.
b6.#
S
~K-AU
(1,1b,3pENDc2Q0C)1
3
'A T(10 A4)
Ff-31R
1
FIR"'vlAT(,-i 10'C)
2
lfRWAT( 4 110)
.
-.
.
)ALA TNPAL ATSJALtNVALq~NE
kAt;( I C-
.----
.
.
.
.
h9t
700
( IQ4) I1t) 1 Cv,
kAU
73.
74.
7b.
760
77o
78.
19.
0
0
HTW.'
GY-.)
CL-
4RI'1N
CALL PL'-T(xMVIYfRG-YG#G,-3 ).~.....
Ei~1I.D LArNt; vASS rAPL
W-I TE ( I 0., P1)
.
.
-
.
.-
-
-
-
ID#ALAT~ -
-.
-
--
-.-.
--..--
21
S
C
~65
C
b7o
1580
C
C
96.
97o
98.
990
0
0
*
luk.
1010.
K~" TU~,tLAND* MSG
ULWLUT IPP43j* P IrINCHo LMo, ID)i (
829
833o
900
92.
93.
0
0
C S T PLt$TIR
C
CMmR
4 IT:
C
C
C.
120
HfAr)INGi
ON PLftPT
-
.
.
-.
,
-
.
yL(.DHstU,..CCALL PL'lT(O.,C*#3)
CALL
cHAW
-
.
-
------
-
-
---..
.
A'
CALL 1A(LTPLToLNjLN-DNHIR,#M
IF UNGRI U' J 0) CALL. MAPLAUL(HTNUt1
IF (N(JRIDOEt2.1) CALL 4PRDCj~N
IF (NLAN0.EQ~l)-CALL MtAPLAN()(tAS0)
FIN~D
THE
CraRDINATES
-.
..
.
---..-..----
CO 4.061 Jxl*3*STeP#3CALL LtJCATE (B'JFFER1(J4'k),1eUFFERI(.J+2) ,XPYP)
C ALL 5 Y ?tL ( P#-YPD.o7 e c.,1........
-.-----
C
C
C
CALL PLt-T(xMtVEapO.,@3l)
CALL
rL';r(0-O,Oso,9991
-
---
--.-.-
a
107.
108.
1, 9 .
110.
lit19
2
RIT FO(10sF4PLOT TAPE tLOSLO)
ARITEi1 "sSI
0)4
8C'00 FORtAT(10xof eRi1T RUN tOPFLETL
CALL EXIT
OU
0
0
.0
~~Ak2~ ~
S~~~1~~~
A
-~
5
pI,
PONS-OTD.
PONSLTTD)
73
BIBLIOGRAPHY
APL (1973) The SEASAT-A Mission Report of Phase A Study,
vol. I, sdo 3539, July
Barrick, Donald E. (1972) Determination of Mean Surface
Position and Sea State from the Radar Return of a
Short-Pulse Satellite Altimeter; in Sea Surface
Topography from Space, ed. Apel, NOAA, ERL 228-AOML 7-2.
Brouwer, Dirk (1959) Solution of the Problem of Artificial
Satellite Theory without Drag; Astron. J., Vol. 64,
pp. 378-397
Brouwer, Dirk, and Clemence, G. M.,
(1961) Methods of
Celestial Mechanics; New York, Academic Press
Brown, W. E. (1973) Global Measurements of Ocean Parameters
with Spacecraft Radar; Jet Propulsion Lab. Tech. Report
(unpublished manuscript)
Bruce, J. G. (1965) Near Surface Currents off the Somali
Coast in the Summer Monsoon, August 1964; WHOI Tech.
Report 65-66 (unpublished manuscript)
Bruce, J. G. (1968) Comparison of Near Surface Dynamic Topography during the Two Monsoons in the Western Indian
Ocean; Deep Sea Res., vol. 15, pp. 665-677
Chovitz, Bernard H. (1973) Downward Continuation of the
Potential from Satellite Altitudes; presented to 5th
Symposium on Mathematical Geodesy 25-26 Oct. 1972,
Florence, Italy
Droppleman, J. D. (1970) Apparent Microwave Emissivity of
Sea Foam; J. Geophys. Res., vol. 75, pp. 696
Duing, W. (1970) The Monsoon Regime of the Currents in the
Indian Ocean; East-West Center Press, Honolulu, Oahu,
Hawaii
Ewing, Gifford C. (1969) On the Design Efficiency of Rapid
Oceanographic Data Acquisition Systems; Deep Sea
Research, Supplement to vol. 16, pp. 35-44
Frey, E. J., Harrington, J. V., and von Arx, W. S. (1965)
A Study of Satellite Altimetry for Geophysical and
Oceanographic Measurement; presented at Inter. Astronaut. Federation, 16th Inter. Astronaut. Cong., Athens,
Greece
Fuglister, F. C. (1963) Gulf Stream '60 in Progress in Oceanography, 1, pp. 265-283
Fuglister, F. C. (1971) Cyclonic Rings Formed by the Gulf
Stream 1965-67; in Studies in Physical Oceanography;
A Tribute to Georg Wust on His 80th Birthday, Gordon
and Breach, New York
Fuglister, F. C., and Voorhis, A. D.,
(1965) A New Method for
Tracking the Gulf Stream; Limnol. Oceanogr. Suppl.,
vol. 10, pp. 115-124
Fuglister, F. C., and Worthington, L. V. (1951) Some Results
of a Multiple Ship Survey of the Gulf Stream; Tellus,
vol. 3, pp. 1-14
Gaposchkin, E. M., and Lambeck, K. (1970) Smithsonian 1969
Standard Earth; S.A.O. Special Report #315
Gaut et al. (1972) Microwave Properties of the Atmosphere,
Clouds and the Oceans; Final Report Contract No.
NAS5-21624, March
Gordon, A. L. (1967) Geostrophic Transport through Drake
Passage; Science, vol. 156, pp. 1732-1734
Gordon, A. (
) Recent Physical Oceanographic Studies of
Antarctic Water; in Amer. Assoc. for Advancement of
Science, Washington, D.C., Pub. No. 93, Research in
the Antarctic
Greaves, James R., et al. (1970) Cloud Cover Statistics
and Their Use in the Planning of Remote Sensing Missions;
Remote Sensing of the Environment, vol. 1
Groves and Hannon (1968) Times Series Regression of Sea Level
on Weather; Rev. Geophys. and Space Physics, Vol. 6,
p. 129
Hamon, B. V. (1966) Continental Shelf Waves and the Effects
of Atmospheric Pressure and Wind Stress on Sea Level;
J. Geophys. Res., vol. 71, no. 12, pp. 2883-2893
Hansen, D. V. (1970) Gulf Stream Meanders between Cape
Hatteras and the Grand Banks; Deep Sea Res., vol. 17,
pp. 495-511
Hendershott, M., and Munk, Walter (gqo ) Tides; in Annual
Review of Fluid Mechanics, vol. 2, pp. 205-224
Kaula, W. (1963) Determination of the Earth's Gravitational
Field; Revs. Geophys., Vol. 1, pp. 507-552
Kaula, W. (1966) Theory of Satellite Geodesy; Blaisdell
Publishing Co., Waltham, Mass.
Kaula, W. (1970) Earth's Gravity Field: Relation to Global
Tectonics; in The Nature of the Solid Earth: Proceedings
of a Symposium in the Honor of Francis Birch, E.C.
Robertson, ed., McGraw-Hill, New York
Kozai, Y. (
;')
Seasonal Variations of the Geopotential
Inferred from Satellite Observations; Smithsonian
Astrophysical Observatory, Special Report
Lundquist, C. A. (1968) Satellite Altimetry and Orbit Determination; Smithsonian Astrophysical Observatory,
No. 248
Lundquist, C. A., and Friedman, H. D. (1966) Scientific
Horizons from Satellite Tracking; Smithsonian Astrophysical Observatory, Special Report No. 236
Mann, C. R.,
(1967) The Termination of the Gulf Stream and the
Beginning of the North Atlantic Current; Deep-Sea
Res., Vol. 14, pp. 337-359
Mann, C. R. (1972) The Antarctic Circumpolar Current; Direct
Measurements in Drake Passage: presented at the WHOI
Physical Oceanography Seminar, Summer
McKee, W. D. (1971) A Note on the Sea Level Oscillation in
the Neighborhood of Drake Passage; Deep Sea Res., Vol. 18,
pp. 547-549
Moore, R. K.,
and Pierson, W. J.,
(1971) Worldwide Oceanic
Wind and Wave Predictions Using a Satellite RadarRadiometer; J. of Hydronautics, Vol. 5, No. 2, pp. 52-60
Munk, W. H., and Cartwright, D. E. (1966) Tidal Spectroscopy
-and Prediction; Proc. Roy. Soc. A, Vol. 259, p. 1105
Mysak, and Hamon, B. V. (1969) Low Frequency Sea Level
Behavior and Continental Shelf Waves off North Carolina;
J. Geophys. Res., Vol. 74, pp. 1397-1405
Niiler, P.,
and Mysak (1971) Barotrophic Waves Along an
Eastern Continental Shelf; Geophysical Fluid Dyn.,
Vol. 2, pp. 273-288
Noble, V. E. (1970) Ocean Swell Measurements from Satellite
Photographs; Remote Sensing of the Environment, Vol. 1,
pp. 151
Nordberg, W., Conway, J., Ross, Duncan, T. Wilheit (1971)
Measurements of Microwave Emission from a Foam-Covered
Wind Driven Sea; J. Atmos. Sci., Vol. 28, pp. 429-435
Orlanski, I. (1969) The Influence of Bottom Topography on the
Stability of Jets in a Baroclinic Fluid; J. Atmos. Sci.,
Vol. 26, pp. 1216-1232
Pattulo, J., et al. (1955) The Seasonal Oscillation of Sea
Level; J. Marine Res., Vol. 14, No. 1, pp. 88-155
Peterson, D. P.,
and Middleton, David (1963) On-Representative
Observations; Tellus XV, p. 4
Peterson, D. P.., Daniel, P., and Middleton, David (1964)
Reconstruction of Multidimensional Stochastic Fields from
Discrete Measurements of Amplitude and Gradient; Information and Control, Vol. 7, pp. 445-476
78
Rao, P. K., et al. (1971) Gulf Stream Meanders and Eddies as
Seen in Satellite Infrared Imagery; J. Phys. Oceanog.,
Vol. 1, p. 237
Redfield, A. C.,
and Miller, A. R. (1957) Water Levels
Accompanying Atlantic Coast Hurricanes; Amer. Met. Soc.,
Met. Monog., Vol. 2, No. 10, pp. 1-23
Rhines, P. B. (1969) Slow Oscillations in an Ocean of Varying
Depth, Parts I, II; J. Fluid Mech., Vol. 37, p. 161
Richardson, W. S.,
von Arx, W. S.,
and Stommel, H.(1954)
A Radio Survey of the Gulf Stream with Camera and
Radiation Thermometer; Science, Vol. 117, p. 639
Robinson, A. R. (1964) Continental Shelf Waves and the Response
of Sea Level to Weather Systems; J. Geophys. Res.,
Vol. 69, No. 2, pp. 367-368
Robinson, A. R., Luyten, J. R., and Fuglister (1973) Transient
Gulf Stream Meandering; Part I, An Observational Experiment; submitted for publication
Saunders, P. M. (1971) Anticyclonic Eddies Formed from the
Shoreward Meanders of the Gulf Stream; Deep Sea Res.,
Vol. 18, pp. 1207-1219
Saunders, P. M.,
(
) The Instability of a Baroclinic
Vortex, Vol. 3, No. 1, J. Phys. Oceanog., pp. 61-65
Shannon, C. E.,
and Weaver, Warren (1964) The Mathematical
Theory of Communication; U. of Ill. Press
Sidran, M., and Hebard, F. (1972) Charting the Loop
Current
by Satellite; presented at the Remote Sensing Symposium,
Ann Arbor, Michigan, October
79
Siry, J. W. (1972) Satellite Altitude Determination Uncertainties; in Sea Surface Topography from Space, ed. by
J. Apel, NOAA, Pub. ERL-228-AOML-7-2
Smith, D. E. (1972) Precision Tracking Systems of the Immediate Future: A Discussion; in Sea Surface Topography
From Space, Ed. by Apel, NOAA Pub. ERL-228-AOML 7-2
Smith, R. (
) Non-Linear Kelvin and Continental Shelf Waves;
J. Fluid Mech., Vol. 52, pp. 379-391
Stanley, H. R., and McGoogan, J. T. (1972) The Skylab Radar
Altimeter; in Sea Surface Topography from Space, ed. by
Apel, NOAA Pub. ERL-228-AOML 7-2
Sterne, T. E. (1960) An Introduction to Celestial Mechanics;
Interscience Publishers, New York
Stillwell, D. (1969) Directional Energy Spectra of the Sea
From Photographs; J. Geophys. Res., Vol. 74, No. 8,
pp. 1974-1986
Stogryn, A. (1967) The Apparent Temperature of the Sea at
Microwave Frequencies; IEEE Trans., Antennas Propagation
AP-15, p. 278
Stommel, Henry (1963) Varieties of Oceanographic Experience;
Science, Vol. 139, pp. 572-576
Strack, S. L. (1953) Sea Surface Temperature Gradients as
Indicators of the Position of the Gulf Stream; WHOI,
Tech. Report, No. 53-53
R. D.
Samir
Vincent/and Brown/(1972) Power Spectra of Geoid Undulations;
unpublished manuscript
Vincent, S.,
and W. E. Strange (1973) A Detailed Gravimetric
geoid of North America, North Atlantic, Eurasia, and
Australia; presented at the Inter.
Sym. on Earth Gravity
Models and Related Problems, August 16-18, Saint Louis,
Missouri
von Arx, W. S. (1966) Level Surface Profiles Across the Puerto
Rico Trench; Science, Vol. 154, pp. 1651-1654
Wiffenbach, G. C. (1972) An Observational Philosophy for
GEOS-C Satellite Altimetry, in Sea Surface Topography
228
from Space, ed. by J. Apel, NOAA TR ERL/AOML 7-2
Zetler, Bernard D. (1972) Tides and Tsunamis, in Sea Surface
Topography from Space, ed. by J. Apel, NOAA Pub. ERL228-AOML 7-2
Zetler, Bernard, et al. (1965) Harmonic Analysis of Tides from
Data Randomly Spaced in Time; J. Geophys. Res., Vol. 70
Zetler, Bernard D., and Maul, G. (1971) Precision Requirements
for a Spacecraft Tide Program; J. Geophys. Res., Vol. 76,
pp. 6601-6605