Model 6200 Optical Scanner ^ ^ Cambridge Technology, Inc.
advertisement

^ ^ Cambridge Technology, Inc.
-=
Tel: 617-441-0600
Fax: 617-497-8800
109 Smith Place, Cambridge, MA 02138
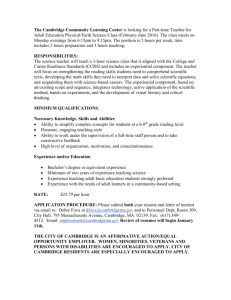
Model 6200 Optical Scanner
Preliminary Mechanical and Electrical Specifications
All angles are in mechanical degrees
Al! .specifications apply after a 30 second warm-up
Consult manual fi>r complete operating instructions
Mechanical Specifications
Rated Angular Excursion: 40'
Rotor Inertia: 0.012 gm*cm-, -i-/-10%
Torque Constant: 1.08x 10^ dyne-cm/amp, +/-10%
Maximum Coil Temperature: 110 "C
Thermal Resistance (Coil to Case): 7.5'C/Watt, Max
Electrical Specifications/Drive Mechanism
Coil Resistance: 2.4 Ohms, +/-10%
Coil Inductance: 96 uH, +/-10%
Back EMF Voltage: 18.9 mV/degree/sec, +/-\0%
RMS Current: 1.6 Amperes at Tease of 50''C. Max
Peak Current: 6 Amperes, Max
Small Angle Step Response Time: 0.3 ms, with balanced load
Position Detector
Linearity: 99.5 %, Minimum, over 40 degrees
Scale Drift: 75 PPM/"C, Maximum
Zero Drift: 25 urad/''C, Maximum
Repeatability, Short Term: 15 microradians
Output Signal, Common Mode: 155 microamperes with AGC current of 30mA, +/-20%
Output Signal, Differential Mode: 12 microamperes^', at common mode current of 155 microamperes, -i-/-20%
.04,)'
.<o
Z..;7-1 •9,'.'
I- o'
'ra
\'^t j ^ / /
.;:•(;•
hCLE Jl
1
" ?
.!
/;b
6
7
8
•o'
•1
; A . . . D M E N S I O S S Air"
JlSC<Pt'J\
tWOIOR
UOICIi
tMO-RR ( i M K N A . CCNNLCIOs;
-WOKH (IN;ERNA-. CONNFri'ONi
LCCl ANODl (1N1:.RNAL CON'jrCHCN)
LEDI CAIHODE (INIl^NAL CONNLC HON!
AGC ffl;T
cojE awou
In
"li:
si-inn
IN WO
hlASS = 12.5 O R W i
02/99
^
Cannbridge Technology Inc.
=
109 Smith Place, Cannbridge, MA 02138
Tel. 617-441-0600
Fax 617-497-8800
Cambridge Technology's line of Moving Magnet Optical
Scanners are designed for a wide variety of applications where
the predominant concern is scanning speed.
The selected magnetic material for the rotor is state of the
art neodymium-iron-boron. resulting in exceptional tlux
densities in the air gap. The intense magnetic field strength
combined with low rotor inertias gives these products
significantly higher torque to inertia ratios when compared
with competing products, resulting in superior peak accelerations.
The moving magnet scanner line uses an efficient low inertia
optical fKJsition detector design developed by Cambridge
Technology. This simple design allows us to offer an inexpensive
but fast and reliable closed loop product.
The product line was initiated with the Model 6800HP scanner.
The Model's 6810P and 6850P incorporate technical advances
that were originally developed in the 68()0HP. Consistent with
our moving coil scanner product line, the moving magnet scanners do not use torsion bars. The advantages of this technique are high
reliability, wide angle operation and that minimal power is required to achieve or hold any given fwsition.
Cambridge Technology offers a variety of supporting products for the moving magnet scanners including controlling electronics,
X/Y Mounts and mirror sets. Custom single and dual axis optical apertures can be supported, consult the factory for details.
SpeefflcaUons
All Specifications Apply After a 30 Second Warm-up. All Angles are in Mechanical Degrees
Mode
Mechanical and Electrical Speciflcations
Optical Apertures Supported, Two Axis
Maximum Recommended Load
6800HP
Units and Tolerances
3
0.18
6810P
5
1.0
6850P
10
5.0
Mechanical Specifications
Rated Angular Excursions
Rotor Inertia
Torque Constant
Coil Temperature
Thermal Resistance, Coil to Case
+/-20
0.018
2.5
110
4
+/-2()
0.1
.5.7
110
2
+/-20
0.5
9.5
Electrical Speciflcations, Drive Armature
Coil Resistance
Coil Inductance
Back EMF Voltage
Current, RMS
Current, Peak
Small Angle Step Response
4.2
96
0.04
1.6
6
0..^
3.4
160
0.10
2.6
12
0.4
1.5
160
0.16
4.3
25
0.5
Ohms. at25",C,+/-10<7r
uH,+/-I09(^
mV/Dcgree/Second, +/- 10<7f
A. Maximum
A, Maximum
mS, with balanced inertia matched load
Electrical Speciflcations, Position Detector
Linearity
Scale Drift
Zero Drift
Repeatability
Output Signal, Common Mode
Output Signal, Differential Mode
98
0.0.'5
0.01
20
.50
3.2
98
0.05
0.01
20
.50
3.2
98
0.05
0.01
20
50
3.2
%. Minimum, over 30 Degrees
%/" C, Maximum
Degree/" C, Maximum
Microradians, typical
uA, wiih AGC Voltage of lOV +/-\i)'/,
uA/Degree, with Common Mode of 50uA, +/-I0',
no
1.5
MM, Typical
C.M*CM-
Dcgrees
GM*CM-.+/-10'7r
X10* Dync-CM/Ampere. +/-1 ()%•
"C, Maximum
" CAVatt, Maximum
Features
Extremely high mirror speed positioning • Wide scanning angle of 80" optical
Precision mounting eliminates most optical realignment • Low wobble and jitter • Highest peak accelerations
Rugged and reliable design • Minimal power required to achieve and maintain any position
s = 3 ~ Cannbridge Technology Inc. i09 smith Place, Cambridge, MA 02138 USA
-5^-=
=
Tel (617) 441-0600/ Fax (617) 497-8800
\Neb Site Address: http://www.camtech.com
Dear Colleague:
Thank you for your inquiry concerning our line of galvanometer based optical scanners. Enclosed
with this letter is a brochure describing the full range of optical scanning products offered by
Cambridge Technology.
We are presently manufacturing six different moving magnet and five different moving coil optical
scanners for driving mirror loads from 0.001 gm*cm- to over 100,000 gm*cm'. We also routinely
provide controlling electronics, mirrors, and X/Y mounts for all of our scanners.
When you compare Cambridge Technology's optical scanners to competing products, you will
find that ours are faster and more repeatable at very competitive prices. Our patented moving
dielectric "Butterfly" position sensing technology in the moving coil scanner line rivals the
accuracy of rotary interferometers. Our moving magnet scanner line offers some of the highest
peak accelerations of any closed loop galvanometer based scanner.
For further technical information, or for a quotation on a system or components to meet your
specific needs, please contact vowr Regional Representative by telephone, facsimile or letter.
Redmond P. Aylward
Vice President of Sales and Marketing
IG
w^^-^
crujujtiJiiiLij
LU cn to (/) I - 1 -
^^fi^^^
X(F^^^
^'
36
Lu »CO I/)-I I J
iiJt-|-f-OU
i{ijIijLy>:>:
(-.XIXUJLJ
^nci-yUi^-e,
4/1^^ ^ o j ^
21F ^ ^ 3
-Th
"7,//i
to
7,.\0
.-2 I
?oX?/f<5CX)
W
, \ ^ 0 o ',\
V^Wi^i-^ ^ -
O.Je^^^^^^P
i^^^
z\^'^(£)
i-OL,
Cambridge
Technology
109 Smith Place, Cambridge, MA 02138
617-441-0600
617-497-8800
www.cambridgetechnology.com
The 6200H Series Scanners
Moving Magnet
Series with
Advanced Optical
Position Detector
The 6200H Series of closed loop galvanometer based optical scanners combines our new moving magnet actuator
technology with our innovative patented
advanced optical position detector design.
This combination offers the highest torque
per watt and closed loop bandwidths, resulting in the highest positioning speed,
precision and reliability available in any
compact closed loop galvanometer in today's market.
The 6200H Series compact design and
material selection deliver the fastest
step response times and high RMS
speeds. The neodymium-iron boron rotor
material allows for exceptional flux densities in the air gap. The intense magnetic
field strength combined with the highest
rotor and mounted mirror resonant frequencies give the 6200H Series products
superior peak accelerations and the fastest
step response times possible in galvo technology.
Instrumentation level accuracy and stability. Exceptional closed loop positioning
accuracy and stability are achieved
through Cambridge Technology's patented
advanced optical position detector providing instrumentation level accuracy and
stability at a very cost effective price.
The fastest step response times. Sized for
the fastest step response times, high RMS
speeds at wide angles and for a broad range
of apertures with single and dual axis solutions from 3 to 25mm, the 6200H series
provides the broadest range of choices to
optimize your system price/performance
for any application. It is available in several different connector and cable options
to meet specific system requirements.
Designed for a wide variety of applications. The 6200H Series is the optimal
choice in for laser marking and material
processing, biomedical systems, imaging
and printing, semiconductor processing,
laser projection or any application where
speed, size and accuracy are critical to system performance.
Cambridge Technology, Inc. also offers
a variety of integral supporting products
for the 6200H Series, including servo
electronics, mirrors sets with coating options and X/Y system mounts. Custom
single and dual axis optical apertures
can be supported, consult the factory for
more details.
Mechanical and Electrical Specifications
Optical Apertures Supported, Two Axis
Maximum Recommended Inertial Load
Mechanical Specifications
Rated Angular Excursions
Rotor Inertia
Torque Constant
Coil Temperature
Thermal Resistance. Coil to Case
Electrical Specifications, Drive Armature
Coil Resistance
Coil Inductance
Back EMF Voltage
Current, RMS
Current, Peak
Small Angle Step Response
Electrical Specifications, Position Detector
Linearity
Scale Drift
Zero Drift
Repeatability
Output Signal, Common Mode
Output Signal, Differential Mode
<^2QQH
3,5,6
0.13
$21QH
,3,5,6
'0.2
6215H
3. 5 ,6
0.28
$22QH
5,8, 10
1.25
Units and Tolerances
MM
gm*cm-,+/-10%
±20
.±20
0.018
2.79
±20
±20
0.028
3.78
0.125
6.17
110
110
1
110
1
Degrees
gm*cm-,+/-I0%
lO'Dyne-cm/Amp, +/-\0%
°C, Maximum
"CAVatt, Maximum
0.013
1.2
110
3.8
•2
2.1
52
Mechanical Specifications
Rated Angular Excursions
Rotor Inertia
Torque Constant
Coil Temperature
Thermal Resistance, Coil to Case
Electrical Specifications, Drive Armature
Coil Resistance
Coil Inductance
Back EMF Voltage
Current, RMS
Current, Peak
Small Angle Step Response
Electrical Specifications, Position Detector
Linearity
Scale Drift
Zero Drift
Repeatability
Output Signal, Common Mode
Output Signal, Differential Mode
2.79
180
108
3.9
20
200
Ohms,+/-10%
fiH,+/-10%
^V/Degree/Second, +/-10%
A, Maximum
A, Maximum
fjLS, with appropriate CTI Y mirror
99.9
%, minimum, over 40" optical
20.9
2.3
6
130
2.4
8
100
94
66
4.1
20
130
99.9
99.9
99.9
50
15
8
155
12
50
50
50
15
15
8
8
155
155
12 ,.-•: 12
• 15
8
155
• 12
&}im
Optical Apertures Supported. Two Axis
Maximum Recommended Inertial Load
2.53
,3.72
'109
48.7
8,10,12,15
i»m
8.10.12.15
6240H
12,15,20,25
8
10
24
±20
±20
0.82
1.11
0.97
1.31
±20
2.4
110
1
110
110
0.80
0.62
2.00
1.2
176
195
5.8
25
250
1.07
1.03
173
229
7.1
25
250
350
346
8.2
25
350
99.9
99.9
99.9
50
15
8
155
50
15
8
155
12
12
;
50
15
8
155
12
PPM/°C, Maximum
Microradians/^, Maximum
Microradians, Maximum
fiA, with AGC Voltage of 30mA, +/-20%
fiA/Deg.. with Common Mode of I55ftA,± 20%
Units and Tolerances
MM
gm*cm',+/- 10%
Degrees
gm*cm-,+/-10%
ia''Dyne-cm/Amp, +/-I0%
°C, Maximum
°C/Watt, Maximum
Ohms,+/-10%
/iH,+/-I0%.
/iV/Degree/Second, +/-10%.
A, Maximum
A, Maximum
^s, with appropriate CTI Y mirror
7c. minimum, over 40" optical
PPM/<:, Maximum
Microradians/''C, Maximum
Microradians, Maximum
liA, with AGC Voltage of 30mA, +/-20%
fiAJDeg., with Common Mode of 155/iA, ±20%'
3/11/05
Cambridge Technology Inc.
109 Smith Place, Cannbridge, (VIA 02138
Tei. 617-441-0600
Fax 617-497-8800
Cambridge Technology's line of Moving Magnet Optical
Scanners are designed for a wide variety of applications where
the predominant concern is scanning speed.
The selected magnetic material for the rotor is state ofthe
art neodymium-iron-boron, resulting in exceptional flux
densities in the air gap. The intense magnetic field strength
combined with low rotor inertias gives these products
significantly higher torque to inertia ratios when compared
with competing products, resulting in superior peak accelerations.
The moving magnet scanner line uses an efficient low inertia
optical position detector design developed by Cambridge
Technology. This simple design allows us to offer an inexpensive
but fast and reliable closed loop product.
The product line was initiated with the Model 6800HP scanner.
CTI's Moving Magnet Optical Scanners and controlling electronics
The Models 681 OP and 6850P incorporate technical advances
that were originally developed in the 6800HR Consistent with
our moving coil scanner product line, the moving magnet scanners do not use torsion bars. The advantages of this technique are high
reliability, wide angle operation and that minimal power is required to achieve or hold any given position.
Cambridge Technology offers a variety of supporting products for the moving magnet scanners including controlling electronics,
X/Y Mounts and mirror sets. Custom single and dual axis optical apertures can be supported, consult the factory for details.
Specifications
All Specifications Apply After a 30 Second Warm-up. All Angles are in Mechanical Degrees
Model
Mechanical and Electrical Specifications
Optical Apertures Supported, Two Axis
Recommended Inertial Load
Maximum Inertial Load
6800 HP
3
0.016
0.15
Mechanical Specifications
Rated Angular Excursions
Rotor Inertia
Torque Constant
Coil Temperature
Thermal Conductivity, Coil to Case
4/-20
0.016
2.5
110
4
Electrical Specifications, Drive Armature
Coil Resistance
Coil Inductance
Back EMF Voltage
Current, RMS
Current, Peak
Small Angle Step Response
Electrical Specifications, Position Detector
Linearity
Scale Drift
Zero Drift
Repeatability
Output Signal, Common Mode
Output Signal, Diflerential Mode
68I0P
5
0.1
1.0
68.S0P
10
0.5
5.0
Units and Tolerances
MM. Typical
GM*CM=
GM*CM-
H-20
0.1
5.7
110
2
+/-20
0.5
9.3
110
1.25
Degrees
GM*CM-,+/-10%
xlO^ Dyne-CM/Ampere, +/-10%
" C, Maximum
" C/Watt, Maximum
4.0
120
0.04
1.6
6
0.3
.V4
250
0.10
2.6
12
0.5
1.4
350
0.16
5.0
25
1.0
Ohms, at 25", C,+/-10%
uH,+/-10%
mV/Degree/Second, +/-10%
A, Maximum
A, Maximum
mS, with balanced inertia matched load
98
0.05
0.01
20
58
1.2
98
0.05
0.01
20
58
1.2
98
0.05
0.01
20
58
1.2
%, Minimum, over 40 Degrees
%/° C, Maximum
Degree/" C, Maximum
Microradians, typical
uA, with AGC Voltage of lOV +/-10%
uA/Degree, with Common Mode of 58uA, +/-10%
Featares
Extremely high mirror speed positioning • Wide scanning angle of 80° optical
Precision mounting eliminates most optical realignment • Low wobble and jitter • Highest peak accelerations
Rugged and reliable design • Minimal power required to achieve and maintain any position
Iheae drowtrtgt and «p«dfloalkMis ore Ihe property of
CAMBfOOCE TECHNOLOGY ond 9(108 not be reproduced,
or copied, or used aa the boala tor the manufacture
or sole of opparatut without the tfrltten permlailon o l
CAIUBWDCE TEOWOLOGT. INC.
REVISION
ECO REV
14U
DESCRIPTION
APPR DATE
PTM
PMS 9.10 & 11 CORRCCIED
i/99
4-INT CONN
CABLE 1
+MOTOR 1-RED
3-INT CONN
-MOTOR 2-BLACK
AGC OUT 7-GRN
DIOOE COMMON 8-WHT
5-INT CONN
lb 10-BLK
6-INT CONN
SHiaO 11-HT5HRNK
la 9-RED
HaEi
C8Lf
1
1
—
—
—
—
BLACK
-ubm
MYCtiNAL CMMeCYIM
—
—
—
—
GRCEN
i
kHitt
i
m
^
2
OESCRIPTJON
-t-MOTOR
2
2
!J
MRE CaOR
RED
HTS»fiNK
UNLESS OTHERVHISE SPEOFIED
TOLERANCES
.XX1:.010
.XXXi:.005
( > INDICATES m m
ANGLESA 0 * - 3 0 * „ SURf AOE ROIGHNCSS
V
BREAK A U SHARP EDGES
mStHiS. t t m i f M M
MYCfolAL MfMtCKVM
MTERHAL CONNECTKM
AGC OUT
t)ld»MUMON
lo
^
DRN
12/30/98
DES
PTH
CAMBRIOGe TECHNOLOGY. INC.
109 SMITH PLACE
CAMBRIDGE. MA. 0 2 1 3 8 - USA
CHK
ENG
APPR
PROJECTION
62XX/6010-8L
WIRING DIAGRAM
MATERIAL
^EU>
D03762
REVISION
USED ON
RNISH
B
SCALE : NTS
SHEET
1
OF
I
These dnnrings and apedflcoUoM o-e Ihe property of
CAUORCOE ICCHNQljOOY < n i ahol not b« reproduced, or
eepteii or used as (be btaia tar the momifoctyr^ or
ECO REV
sole of ofparatus nnhout the wriUen pemJeibn of
CAMeRPOE TECHNOtOCY. W g
J=2.4MGM*CM2
.480-
.0394±.002
REVISION
OESCRIPTIOH
ann)--
T
.050-f
(4 PLCS)
.200
.100 (2 PLCS)
J_
APPR DATE
J.
-A
— .100 (® 27*)
(4 PLCS)
COATING SUmX TABLE
ocscnnxM
WffW
-y
NOTES:
nutuNcm
IHOaOSS
ROUCIMTY
4S(M7Snm
WLlKlAYa
taXMN
-s
- mf>
-A
-C
(SUBSTRATE)
1) FLATNESS: LAMBDA/2 ® 633NM
2) SCRATCH/DIG: 6 0 / 4 0
i ) MAXIMUM CHAMFER .DOS
4) POUSH BOTH SIDES
1000 A
oBtta
!
\Mm
UNLESS OTHGRIMSC SPECFCO
TOLERANCES
XXi
.010
(COATING)
4) RERECTIVE COATING ON ONE 9 0 E
ONLY PER SUmX TABLE.
5) CONSULT CTI ENGINEERING FOR IRRADIANCE
POWER RATINGS.
yxx± .005
( ) INOKATtS mm
ANCUS± 0 - 3 0 '
MATERIAL
PKOr CQAIVC
SO
Mof
SO
CO$A
- '"
-[
^OTMOOOCC
16J' TO 65-
ORN
02/03/99
OES
AMB CAMBRIDGE TECHNOLOGY. INC.
23 ElM ST.
WATERTOW. MA. 02172 - USA
CHK
CNG
APPR
PROJECTION
6200/6210 3mm STANDARD Y
.0394 THK. SUBSTRATE
FUSED SILICA
FINISH
liSEO ON
SEE NOTES
REVISION
D03783
<;rAir nfvif^
TTTri
J=2.1MGM*CM2
These drawings and apedflcotlms ore the properly of
CAMBROMX TECWIOLOGY and ahol not be reproduced, or
copied, or used os the bails for the manufacture or
ECO
sole of opporahis alUiaut ihe w H t a n penniaion of
CAIIBRB?CC TECHHaOCY. IMC.
REVISON
DESCRIPTION
REV
APPR DATE
— .0394±.002 (1mm)
MIRROR COATING SUFFIX TABLE
DEScnpnoN
SUFFK
-V
-S
-A
-5
-Y
-c
-^
NOTES:
(SUBSTRATE)
1) FLATNESS: LAMBDA/2 © 633NM
2) SCRATCH/DIG: 6 0 / 4 0
3) MAXIMUM CHAMFER .005
4) POLISH BOTH SIDES
(COATING)
4) REFLECTIVE COATING ON ONE SIDE
ONLY PER SUFRX TABLf.
5) CONSULT CTI ENGINEERING FOR IRRADIANCE
POWER RATINGS,
iSaKMlfflf
PROTECTED ALUUMM
DBUcmcan
IHCKNESS RtRECTWIIY
MULTI-UYCF
450-673nni
400am-ia6uin
1000 A
1000 A
30O-6O0nm
ziiimi
1666 A
iJOtun
lOJun
98% UM
zoFwaoENce
PROr. COAIING
16.S' TO a -
SK>
Urf
SiO
OMIT
UNLESS OTHERVH^ SPEOFEO
TOLERANCES
X K ± .010
JOO(±.005
( ) INDICATES m m
DRN 0 2 / 2 / 9 9
DES
CHK
ANClESt 0 - 3 0 '
MATERIAL
APPR
PROJECTION
FUSED SILICA
RNISH
USED ON
WAVBiNGTH
SEE NOTES
ENC
AMB
0 2 / 2 / 9 9 AMB
CAMBRIOGE TECHNOLOGY, INC.
2 3 ELM ST.
WATERTOVWJ, M A . 0 2 1 7 2 - USA
6200/6210 3 m m STANDARD X
.0394 THK SUBSTRATE
-E3D03782
REVISION
SCALE
NONE
ISHEET
1
OF 1
• «wta4« « i r t « » e a ^ l « mam
'!»»»
JO-SL.
0.125 THRU
(2)PLC'S
1.41
I4-40UNC-2B
INPUT BEAM
.266
1.39
.909
I
#4-40UNC-2B
BLACK ALLOY ONLY
TIGHTEN TO 14 IN-LBS
TYP(2)PLC*S
1 332 TYP
1
EO-
""»
asMOO* v - j t r . . .
unamnmM V
M3x0.5-6H X .30"DP
TYP(3)PLC'S
BS.
-E3jooja.
nar
6210 XY INTERFACE RH
l a m t I S ' UECH
O
D03793
WWltl
hhBT ' «f
These drawings ond specificotions ore the property of
CAUeRIDGC TCCHNaOCr ond thofl not be reproduced,
or copied, or used os the bosis for the monufocture,
or sole o l t ^ a r o l u s wthout Ihe written permission of
CAMBRIDGE TECHNaOGYjWa
REVISION
ECO
Af-Pft DATE
DESCRIPTION
REV
PIri
.88 WAS .89. .95 WAS .96
. 0 4 3 ! ! " WAS .0341
IO/S18
PIH
ROI 9 0 '
2/9J
0.093
+.002
— — .043-.001
HaE
9—.
1
2
3
4
5
6
7
8
9
.000
-.001
lb
ti
1
DESCRIPTION
+MOTOR
-MOTOR
+MOTCR (INTERNAL CONNECTION
-MOTOR (INTERNAL CONNECTlOtJ
LEDI ANODE (INTERNAL CONNECTION)
LEDI CATHODE (INTERNAL COliliECTiai)
AGC OUT
D(00£ COUUON
lo
lb
SHiao
(ALL OlMEIJSlONS ARE IN INCHES)
MASS = 17 GRAMS
UNLESS OTHERWISE SPEaFIED
TOLERANCES
.XXt.OtO
.XXX±.005
( ) INDICATES m m
ANGLES* 0 - 3 0 '
, .
SURFACE ROUGHNESS
V
BREAK A a SHARP EDGES
DRN
DES
CAMBRIDGE
TECMNOLOOT.
INC
109 SMITH PLACE
CAMBRIDGE, MA. 0 2 1 3 S . -
USA
CHK
ENC
APPR
PROJECTION
6210
OUTLINE DWG.
MATERIAL
D03628
REVISION
FINISH
USED ON
SCALE NONE
IsHEET
I
OF
I
These drowings and specifications ore the property of
CAMBRIDGE TECHNOLOGY and shall not be reproduced, or
copied, or used os the basis for the manufacture, or
ECO
sale of apparatus without the written permission of
CAMBRIDGE TECHNOLOGY, INC.
REVISION
REV
APPR DATE
DESCRIPTION
0.375/0.376 THRU
#4-40UNC-2B X .63DP
0.125 THRU TO SLOT
0.25 C'BORE X .13DP
BLACK ALLOY SCREW ONLY
TIGHTEN TO 14 IN-LB
06W SAWCUT
— .38
—
.75
UNLESS OTHERWISE SPECIRED
TOLERANCES
.XX±.010
,XXX±.005
( ) INDICATES nnm
ANGLES± 0 - 3 0 '
MATERIAL
DRN
02/11/99
FINISH
REVISION
DES
CHK
ENG
APPR
PROJECTION
A
PTH
CAMBRIDGE TECHNOLOGY. INC
109 SMITH PLACE
CAMBRIDGE, MA. 02138 - USA
6210
PREFERRED MOUNTING
SCHEME
D03800
SCALE ; NONE
SHEET 1
OF 1
• —•••««.• r
f
ttnrVK
0.125 THRU
(2)PLC'S
#4-40UNC-2B
BLACK ALLOY ONLY
TIGHTEN TO 14 IN-LB
TYP(2)PLC'S
INPUT BEAM
#4-40UNC-2B
•332 TYP 1
.909
I
M3x0.5-6H X .30"DP
TYP(3)PLC'S
tnm
liocuia—
V
HI Bmm
tB&
f&mr
6210 XY IN1ERFACE LH
3mm ±15* UECH
003807
Thoretical scanner angle limit for sin drive
£. -
!•
•
\ .?]
'v-J ^ . , '' ' V " -'<
V *' '
<fl.*.>•
«*-. ll
.*. ,.
*
'. * :i .^* ' •' w [ :. o' V
'!*• 1 T - V
?>'•
-;.'
^
.^ f , r - f ' • **^
r
' '
•1 a _ -^ - ' i
'",«
.*-^
* ". .- .. "i ]
. \
nr -"^i-'
•i " * *t
1.0 ^
.. ^
i
\
- * ^',
* , '*.* * . . N^
fc"
'
.
•^
'
""
\
*
'•
•" * ^ -^
•
*.
*', - . ^:
*u.• „,, ''• \V. H
.
,^^ ' ••vl
' J
t
•,"
! ". :'
,-'
. . i *..-'..
'•
if-.
' \ .. ' • « ' ' . tr
-^
.- : '
*
> V' ' l"
1.6 ' u . .
• .":•••;
\
*»f
• r
A
,
««.
* *' - j " ' *,^ . '
^
. .^.....,1;
1 . t
- •1
-^
.
' T * '•*
*--V.
•.*. *
r ..
\. 7
,
**.'
*
^
^
'
-„..
••-•i'
,i;
,i„:;it; - .
", '. • **
' f ••
1 A
*
*
.
•' 1
~t
,x" ;• •*
. , ..
'
^'
*
*
. i+
• f
J
,^
,**,
.•
'.
,-•• '
. I
• -'l '
•I
*
\
'f^
S''
./
,;
\.\.. r-.
"
. , .^ ." J^ •" ,'.'" •,
•5
^
\^
L*^
1.2 - ^- : . •-•i,
:
Ir \ . '^f ' \ \ t . "
• V
,
\
*
*
,'.
*
••
*
.* ;..
•
f . •"
i .
:".">
•;«.
• . ,
- *'
\^ - N k,*^. ... 1
*
»- '
.',
-, .
^'.-..
J-' ' •.
.. . . . [ > . . ., ^•'. •
'. ... J\ , / '
.-. -1
.^.
V ^ i..••
i
'•'S.
.-.
*
'
>'
.•
^
u
' t 4^
"
^
'
.
.
'
'
'
.
;
''v.
- '
"^ .
-•
* •''.
'
"V 1
^<>.
,CT
•
",
.
'
•
^
.:0>
"T"***,,^^
1
t\ Q
<. .'
',
**- :•**
.
,
i a
U.o ,
.
>
*
^
^
^
'^
1
h
'
..'•
.
'.
,,
.. .J
*•<:.
•
*
. .- :
, •
\ ••••^
,
• '
>
*
•
.
•
"
'
•
r
—
^
t
—r-1," - » ;
' ' -..';
.. ,
.*.*. • '•! • .. •
.-. r—
U.O -•
-*,
•
*
^
•. . - t l .
•• L
K"
'
*1
'
. ' ,' ^- ,
*t .
* .- ^ .:
•
'.••
+
."
.•• • •.' { " t
' ^ 1 TJ!* .,.•
. ..
I "
'>"' •• -.- • - , J * i ,•
C\ A A
».
,
.'
.* *• . ,-..
+^
f 1 .
".'t^
U.4 -'
' .,
'
... • • „ j "
^\ •• r-'- 1- ••• 'A:,•**"
!. ' ^
" i ,-,.•,
i-- ^
1
.
t."
V
"* '-.*
' t
•
•
I
< '•,7-r,*
• . t -.1
V
l
.
.
.-. <.'i^
(\ 0
"!.-"*"
,
** '
* - IP
.' . ^
. -*
i " ' •""
. r ••
•' / r - i •' ^ \
\i.£. ^ r
- .^
• '"
» * - J , r * r J .,
"
,*
."
'1
- .
.' ,
^
.
^
'
*
*
•'
.
*
r
.
".„
.
•'
• %"V
-". ...
r- -'>ll ••'• 1
r
.
_
, -.
"**
: -.
- *1
4* t
,.;___]
1
•1 . *
' . ^
0 - ^
10
li
25
20
-'
"
*
*
J
'• ,1,
»
'
^'„^"
—r
/•:
?
•
",
•
•
- ^
,
•
•
*
" •
-
^
•
4
• •
•
L>
•*
«
H
'
H
*
,
•
^
•
*
*
*
•
-
•
'
/
•••
•
•
•
*
.
^
•
*
*
'
•
•
•
1
»
.
•.
•"
•1
•
\
•
•
,
1
•
•
'
'
•
4
•
*
*
-
•
•
*
*
*
.
*
**.
••-
, .
•
* .
;
* i
•
*
•
.
1
•
/
•
•
•
^
*
•
•
.
'
,
-
;
:
•
• * ^
t'
^
.
'
•
*•'•
^
• •
•*
_
J
1
k
1
1
••%•
!
t
^
^ -
•
.
^
••
,
•
* '
-
.
•"
T
^
.
'
.
.
'
•
,
"
•
.-
1
•^
.
il
'
•
^
•
.
•
,
*
.
'
_••
•
*
' •
fl
*
•
*
•
;
'
*
•
•
»
.
^
'
•
• ! ;
-
•
*
•
.
^
.
, '
• - ,
•i
.
^ ^
4
-r.
•4
- . ' . J
• •
J •
.
t
•
4
' • . - « ' .
• - .
•
•
•
:
•
.
.
•
•
• •
•i
>.
r-
•"•'"';••
:'•
1
4 -
t
< * ' "
'
^
••
•
\
•
. - .
•
•
, - ' •
1
• ' •
,
;
•
;
l*
_ - •
_
•
.
•
1
•.
•
•'
•
•
•
;
•
• •
-
•
'
*
.
'
I
:
"
.•
,
*
•
" 1
•
.
"
•
•'.
.
•
-
•
.
5 1 . .
• .
•
•
'
- . . : •
*
•
*•
"
^
• •
•
1
i - 1 , . . . *
r'=3-
:
t
-
1
i>
.
•'•;•,
'
•
-
••'
: . %
"
t
•-,
•
•
•
^
1.
,
'
' •
•
14
,.
•. ' •
'..•;
1.
•
* .
• > . ' , 4.
" '
* y
*-y
r
• • '
•x*
' '
• • *
-
• ,
•
>
-
.
I-
•»!
.
•
^
• -
V.
•
• .
**
• l .
•
•'
•
^
' '
.
• ,
-
.
•
=
»
-
• ;
•••
.
i
•
' 1 - "
,
• ' \ ^
>
• •
•
• '
•
'
4 -
*
•
•
-
•
*
'
•
.•
, - •
:
.
•
- • •
-
4
-
•
*
* ' H
_
\
^
-
_
-
* 4 : * - . .
-
f
" : - i -
;
\
•
•
•H4
•
• * • • * *
1
.
•
f*^
*
• • :
•
•
^
•
• ' • -
*i*i
.
"
'
-
•
1
'
,
<+
•
;
' \ ,
l.-ii
i**"-ji. f
,
4
-
'
•
• ( •
J
'
y '
*
' r
V
."•"
• ; • : • •
<
TTT
* :
•••
. ' . . ".*.-.
• -
^1 •
•
,
,
,
. > • ; • '
t
••
;
•
•
'
-
.
•f
•
•
»
* •
. - - .
•
1 -"
,
•
V
H
• •
•
t "
. - . ' •
<
.
-
•
,
•
•
•
'
*
•
.
•
•
*
1
j _
'
.
,,.
•
•
1
1
• •
•
•
•
'
- * /
'
J"
' " ' 4 = * '
•
" .
-
•
•.
1
•.-*'.
.
:
*
'
.
-
• .
•
•
•
;
'
^ '
1
..3
-
.
•
•
:
'
•
y
*
_ ^
•
-
•
'
•
•
•'^
•
" - • " • •
'
•
-
• •
-
J
• ;
•
*
* •
.
•
. * •
"
-
*
•
^ . •
/ •
".
•
•
•
"
•
Angle in Degrees
•,
•
,
• •
4»
i'n"
,• J • _
^
1
-Thoretical scanner limit
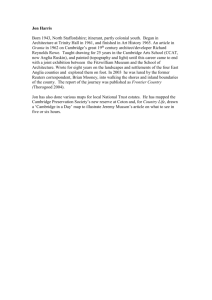
E R R O R V.
0 027-j
POSITION
Run Time
0 Hour
.
6 Minutes
j S il m p I c #
0 024"
j iSl o f S J
"
Stage
0 022
i ""
1
Model
C_MA-25PP
0 0 2 0 " ""
i S t a g e S/N
0 018
012550
0.016
T a r g e t / Init P o s i t i o n
0.0000
0.014
0.012
Measured
r
Position
I
0.0064
0.010
ESP Position
0.008
L
0.0000
•
0.006 !
Error
—
0.004 "i
0.0064
Forward
10.0
12.5
;5.o
17.5
20.0
22.5
25.0 ;
Reverse
.•\bsolute A c c u r a c y
0.0067
0.0269
il
I !i
STOP
<'
"x"' |
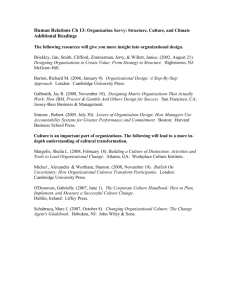
E R R O R V.
POSITION
Run T i m e
0.026:
0 Hour 6 Miniites..
^-'
1
^
,.-<T'
0.024
-'
-•X
Sample #
.;>
5 1 of 51
Jj
Stage Model
0.022"
CJIiflA-2^PP
-^
0.020
I S t a g e S/N
0.018"
012553
0.016"
Target / Init Position
0.014
0.0000
0.012"!
Measured Position
|-
0.00361
0.010
0.008
-
^
.
•
ESP Position
'
0.0000
L.
0.006
Error
0.004
0.0036
0.002
Forward
0.000
0.0
2.5
5.0
7.5
10.0
12.5
15.0
17.5
20.0
22.5
Max Hysteresis
Avg Hysteresis
Absolute Accuracy
\[f
0.0046
0.0042
0.0264
01
25.0
Reverse
STOP
y
Thoretical scanner angle limit for sin drive
£. -
,I
1
^ .
'
H",'
1.8^ , ^
,.,'
-
*,•*
, 1
-
-
'
,'
i O _.
1.2
>
o
c
:.
,'.
1 -- '
0
\
*:
'
*
-. -
h- "
,
'
•
•
*
\
•.
• *
: .\
r
i:
,
r
1 '
-
•
V
\
\
r
L " ••••-•
\
S
.
U.D -
1
'
"•
"
n o
Kj.d. -
0 J
1
.
•
-
^
.•
'
y: . '
" T '
it..
*
•Y * •
..'
• .
• 4-
i,
•
•
.
. " ...i
-
',
.
•
•
•
4
••
^»
'i
• * - ,
\
- ,
' - ,
',
^
", ' •
*.
' *
:.
* ^fl
.:.....
'•" .
•
N ""*"
i
'
^ ^ - ^ N ^
' " • •
>•
*
;
-•
•,"L
.
-^ \
* '-I
• !
•
'
• ;
'
^-
t
4
;
-
•'
.
••
"••
:-.* *
..
.,
*
•
i
'r
" t
••
.••.
.-•••
•
1
^
•
•
J...-
-
•
•
.'^ ' -.L
.
• •
4 ' - *
•
L
,i
• • .
'
•
•
*
'
*
.
;
*+
'
•
•
T
»k
. ,
,
• .
_
r
-.<
-
•
'
"
*
-FT.
•
.
•
^ • • \
• • > - ' ^
*
irf
.^
•
-
* ' i .
•
•
•Thoretical scanner limit
-A
"+ 4
' \
. 1
•
.1^
.
.
-
" , •
.
-
i
'
A
• . '
:
•
•
•
'
• *
•
-
*
*
f
.
•
•
*
••
• • •
•
•
.
'
•
* "
.
" .
1
*
'
,
• .
1'
, 4 . ,
4-
,
, 1
*
. . ' • •
"i
•
-
i.
•
•
•
' .4
^" '
..
.'*
-*
, -;
' '
,-;
'
•
,
• '
- ^
• • *
•••-.,..•
1
i
*
• .
• •
"
•'
15
'
•
.
.*•"
•i'
•
.
. -.
.. .
>
. "
*•
..r-H
""
20
. •
*^
'
• t :
•.
•*:
,
'l
.-ir
I • "
.
Angle in Degrees
" * * .
,.•"•
T
10
.':
•
.. .,*.. r*
.. S-.
i - :
'
'
<j <
i
%
t
*
.'•
.
r*
4 . '
' •
^.
'
=
F.*.
•
•
; •
•
-t
.- t
'-'^•-^
*
T-V*.
*
•
' •
•
,
H
H
J
- • .
•
•
^
».'
A
. .-.:
"
,,*..-.
* . *
.. . ^ „ _ _ j •*: '
•,
* '
*
'
• " ;
*.. .
-,.
'
•4'
'
'
.•" '" f >, "-^
-^
<
•!
-^;
;
.*:*
."• '. ,> *
.. - ._
_ ,/
^
.rrf'-..*
\
-•*
.'**
-,
' ' ' .*
.. . ^ , ^ * ' "
\..*' ".
' '.
-.
1 _ .
* „*
'•*",
„*'
,'-:
- ','
•
•
^
•' 1
;.
^ .J
-.
.. '
" .-•
,»
•
'
"i
-
-
?!
.
*
5
. - •
•-'-.?
'^"i
!^'
'.*: - < ;-
-
'...'
^
.> ' •
. -
••.'.•
^^
.
-4-
••••':i
;
-.
'
•
f
.
"T
' , :
J*
V
* 1.
1
.
„
."v •
"**.
"•'*;
.'•
.v.V.-.
- < •
.'
ii
\ 4 t '
>
'
.• •
:•.*.
\.i
•
•
, . . . : • • " .
* . ' T
.,o
'*
;
.. . '
"t
.
' **
* * •
•
••
. J l
• *
, . ' * • •
•' M
:
•,•
T, , • *
•
'•^/'••'
• • . . • .
•h\
^':T^
' I
• •
•••
*
- t i "
* -t
*
•
• * • , • •
•
-",
.
T
••
>
: p.,;;
i^V
*T
. - . .
• t •••
/
»
•
*
"
.
•
•
'
•
.'- i •
^ -^
-
'^
*.
' ^ w
" •
'*! '
" i
•
^'
.
•
,"
.:
>
• f
• '
*• . T
•
'
"y.y
-.-.s
•
•
••
r
•
. .I..fi'
*•.-.
ir 9
•
« •
'.
"
•,?
J
•'J.'V
, ... - - - ' ] * ' * •
( ..
^- ' ' . « ^
.
•
••
-
»
+ .1
•'
• ' ;
'
•
"T7T
r
-*:''j.
- " • *
•*
IT*
*
. '
'.if! '
- '., "•-^
-'
1
.
''
-•
,
^
,
*
•
1
-
• 1
/ V H
"
.
..'.'.S
1.
-"iK
v . - . "'4*
•r . . f s
.'< V
•
,
•
•
•
i~*
t
,"
•
'
•
i
" ^ .
•
V
•
*•;
.
t
-
^
't
.
•.
*
, *.*,
•
•.
•-.•
•
•
.
'„ ,t • " '
^
'.--i
•:..'
-.-.J
'
r-:-
1,..
f
* • .-
^
* '
",
-"•
1
* ' '
+
^ '
•
*
^
" • ' •;•
li
V
^''.
.
'-
*
*
•
4h
. '
•-.
•
< • ' • ,
>•.
. '
,
-
.' V i
' •
•
fl
;
. *,
" •
.
* *
'
'
•
••-^
•
•
\ *.
, '
*
••
-
-••
• * ,
•
If
*
^ • *
•
1-
'
'"
'
*.
4M
T
t '
'"
'
—» * •
•
~
4
• . -
T»
,.
f
. .
.
•L'-
;
•
i
^
\
••
• f
N . . ,.
^ ••• . 1 '
:- "
.. , ^ *' *-
•
•
4 ,
*
^
"h*
„.
^''^^•nj
:.
.'-;- .'
l^"
- ..
:
-1'
I*
,
1:
:
U.4 -'
.*
s_
\^ >^ v
1
•
•
-£» .
„
Tj
1
'**
:' '
.-," ,
•
_
*
. ' *
• -*
i'.
•
tk
.
r-
- - • ' .
"
~t
•
•, ] •
-*
•'T'
"
,-: -*
**.
'
" "
--
••
'
- •
-.
\ v
• •.
"'. *
,
''.. -' "
y
• *
•
\
-
i' •
:
•
" '
..
* -. -
•>
-
• ' ^
/
\'
.*
• • • • . •
•
••
.
.-"• •
'^
•.•
'
t "
•
* " -
*v
\
*
,
-
f
'V
•
^^
•
t\ Q
0) U.O I
'
1
:
•^
.....
=.'^*. <;
\.. .
- . , : • -
*
•
^- ^
i
-
* V
\
f
•
:r.>
•-.-*.
±
'
*•
1 v
** i;.'
•
•*-
.
•
\
,-
3
t
'
1
;
^
'• ; >
*
... • \*
' '
•
-
•
•
.,* _
•\ A
•
* , .
\ * ' v;
\
•
1.4
»
J
i
,
1.6- ^.-
•
i
,,•
."- - ^* -I-.
. <*_"
;
V
*
^
i
t
"-..-..1
• . . ' .
^. ......
' . : • (
•
'•
» .
. ....
_i_J
\-
•
^ J
t .
-- *
•-
•
*^
.-• .**^.
- '^
-l
-
*
-1
.
*
.
"
.
.
.
.
•
25