EXAMINATION OF ARRIVAL AND DEPARTURE TAXI TRAJECTORIES FOR
EARTH-MARS CIRCULATING ORBITS
by
ANDREW JAMES KNOEDLER
B.S. AERO/ASTRO, MASSACHUSETTS INSTITUTE OF TECHNOLOGY
(1990)
SUBMITTED TO THE DEPARTMENT OF
AERONAUTICS AND ASTRONAUTICS
IN PARTIAL FULFILLMENT OF THE
REQUIREMENTS FOR THE DEGREE OF
MASTER OF SCIENCE
at the
MASSACHUSETTS INSTITUTE OF TECHNOLOGY
June, 1991
© Andrew James Knoedler, 1991. All rights reserved
The author hereby grants to MIT permission to reproduce and to
distribute copies of this thesis document in whole or in part.
n,
Signature of Author
Department of Aeronautics and Astronautics
February, 1991
Certified by
Walter M. Hollister
Professor, Aeronautics and Astronautics
Thesis Supervisor
Certified by
David Farless
Group Supervisor, Jet Propulsion Laboratory
Thesis Supervisor
Accepted by
A&CO
Professor Harold Y. Wachman
Chairman, Department Graduate Committee
IMASSACriUSETTS i STI•
OF TECHNOLOGY
JUN 14 1991
LIBRARIES
artment of Aeronautics and Astronautics
EXAMINATION OF ARRIVAL AND DEPARTURE TAXI TRAJECTORIES FOR
EARTH-MARS CIRCULATING ORBITS
by
ANDREW JAMES KNOEDLER
Submitted to the Department of Aeronautics and Astronautics
February, 1991 in partial fulfillment of the
requirements for the Degree of Master of Science in
Aeronautics and Astronautics
ABSTRACT
In the last five years two new types of repeating, gravity-assist orbits between the Earth
and Mars have been identified. These Cycler and VISIT orbits repeatedly pass by the Earth
and Mars at set intervals. The circulating orbits can be used by large spacecraft,
"CASTLEs in space", to provide comfortable crew accommodations for the long journeys
between Earth and Mars. The two main studies previously performed on this subject left
some details to be worked out.
The main detail to be considered was the transfer of personnel between the CASTLE in its
circulating trajectory and local planetary spaceports. This study examines the trajectory of
the personnel transfer vehicle, a "Taxi", between a spacecraft in a circulating orbit and a
spaceport in orbit around a planet. Specific attention was paid to resolving the problems of
plane changes, time delays, and phasing of the Taxi trajectory. A three-impulse trajectory
was used to look at the transfers between the VISIT and Cycler circulating orbits and the
spaceports in various orbits around both the Earth and Mars.
The results, which are shown in a series of graphs depicting total AV, transfer time, and
initial transfer orbit orientation, show that minimum AV trajectories exist for each orbit of
the spaceport. Plane changes are solved within the three-impulse transfer while the phasing
and launch delays can be solved by adjusting the impulses in the trajectory. The work done
in this study gives needed information for future studies comparing the feasibility of
transportation system between Earth and Mars using circulating trajectories versus a system
using direct trajectories.
Thesis Supervisor: Prof. Walter M. Hollister
Title: Professor of Aeronautics and Astronautics
ACKNOWLEDGEMENTS
This thesis would not have been possible without the generous support of many people,
each making unique contributions. I would like to thank the people of the MIT Engineering
Internship Program and the Jet Propulsion Laboratory EIP coordinator, Cheryl Hanson,
for providing support in this special cooperative education program. I would like to thank
Dave Farless, my JPL thesis supervisor, for his support, guidance, and advice through my
thesis research and writing period. I would also like to thank all the JPL employees who
gave their expertise, Paul Penzo, Dennis Byrnes, Laura Bass, and others. I am also
indebted to Sam Wilson of TRW, Jim Knoedler, my father, of Rockwell International, and
Prof. Walter Hollister, my MIT thesis supervisor, for their advice and technical critiques of
my thesis. I would also like to thank Audra Garner for her proofreading help and
constructive criticism. Finally, I would like to thank my parents, Jim and Britta, and my
sisters, Alicia and Kristen, for their continued support and encouragement.
TABLE OF CONTENTS
1. INTRODUCTION .......................................................................... 9
1.1 CIRCULATION ORBITS ................................................... 9
1.2 TAXI TRAJECTORIES..........................................
....... 12
2. ASSUMPTIONS AND METHODS ........................................................ 13
3. OPTIMIZATION SCHEMES .........................................
....... 15
3.1 PRIMER VECTOR THEORY .................................................... 15
3.2 PARAMETERIZATION .........................................
16
3.3 THREE-IMPULSE STRATEGY ................................................ 16
4. CASTLE APPROACH SCENARIOS ...................................................... 18
4.1 LOW PLANETARY PARKING ORBITS.......................................19
4.1.1 Earth Fly-by of Cycler Orbits.................................20
4.1.2 Earth Fly-by of VISIT Orbit ....................................... 21
4.1.3 Mars Fly-by of Cycler Orbits.......... ........................................
21
4.1.4 Mars Fly-by of VISIT Orbit ............................................ 21
4.2 PHOBOS ORBIT ...............................................................
21
4.2.1 Mars Fly-by of Cycler Orbits .......................................... 22
4.2.2 Mars Fly-by of VISIT Orbit ............................................ 22
4.3 L1 LAGRANGIAN POINT............................23
4.3.1 Earth Fly-by of Cycler Orbits ........................................... 24
4.3.2 Earth Fly-by of VISIT Orbit .............. .................... 25
5. THREE-IMPULSE PROGRAM ......................................................
28
6. APPLYING THE PROGRAM ............................................................ 31
6.1 SPACEPORT IN LOW EARTH ORBIT..................................
32
6.1.1 Cycler Orbits....................................... ...................... 32
6.1.2 VISIT Orbit...............................................................36
6.2 SPACEPORT IN LOW MARS ORBIT .......................................... 39
6.2.1 Cycler Orbits............................................................ 39
6.2.2 VISIT Orbit .....................................................
........41
6.3 SPACEPORT NEAR PHOBOS..................................
............ 41
6.3.1 Cycler Orbits...........
..................... ....................... 42
6.3.2 VISIT Orbit ............................................................. 43
6.4 SPACEPORT AT L1 .........................................
45
6.5 COMPARISON TO PSEUDO-HOHMANN ................................ 51
7. LAUNCH DELAYS AND TIME PHASING ........................................... 54
7.1 LAUNCH DELAYS .................................................. 54
7.2 BEHAVIOR OF FIRST IMPULSE CONSTRAINED
TRAJECTORIES .................................................................... 57
7.2.1 Earth Encounters ....................................................... 57
7.2.2 Mars Encounters ........................................
58
7.3 PRACTICAL FIXED FIRST IMPULSE TRAJECTORIES...................60
7.3.1 Low Earth Orbit ........................................................ 60
7.3.2 Phobos ................................................................... 62
8. PARAMETRIC STUDY ................................................................. 63
8.1 EARTH ENCOUNTERS .................................................
... 63
8.2 MARS ENCOUNTERS..........................................................65
9. DISCUSSION FOR FURTHER STUDY ................................................. 68
9.1 LAGRANGIAN POINTS ......................................................... 68
9.2 OTHER SPACEPORT LOCATIONS ............................................ 69
9.3 MASS RATIO STUDY........................................... 70
10. SUMMARY AND CONCLUSIONS ...................................................... 71
10.1 SUMMARY ....................................................................... 71
10.2 CONCLUSIONS ................................................................ 72
APPENDIX A DATA AND GRAPHS ......................................................... 75
APPENDIX B PROGRAM EQUATIONS ..................................................... 89
REFERENCES .................................................................................... 93
LIST OF FIGURES
Figure 1 VISIT Orbit (Friedlander, et al., 1986) ............................................. 10
Figure 2 Up and Down Cycler Orbits (Friedlander, et al., 1986) .......................11
Figure 3 Possible Earth Spaceport Locations ................................................ 12
Figure 4 Possible Mars Spaceport Locations ........................................ 12
Figure 5 Three-Impulse Trajectory (Gerbracht, 1968).................................
17
Figure 6 Two Dimensional Rendezvous at Periapse ...........
.
............ 19
Figure 7 Two Dimensional Rendezvous at Intersection of Hyperbolas..................20
Figure 8 Two Rendezvous Options for the Taxi Around Mars ......................... 22
Figure 9 Lagrangian Point Positions in the Earth-Moon System .......................23
Figure 10 Various Positions of L1 with Respect to the CASTLE Hyperbola ............ 24
Figure 11 Possible Taxi Trajectories To and From L1 ..................................... 25
Figure 12 Initial Conditions (Gerbracht, 1968) .......................... .................... 29
Figure 13 Detail of First Impulse (Gerbracht, 1968) ....................................... 30
Figure 14 Detail of Second Impulse (Gerbracht, 1968).................................
31
Figure 15 Detail of Third Impulse (Gerbracht, 1968) ...................................... 31
Figure 16 AV vs Apoapse for the First Earth Encounter - Up Cycler Orbit ......
.......33
Figure 17 Transfer Time vs Apoapse for the First Earth Encounter - Up Cycler
O rbit .................................................................................... 34
Figure 18 Optimum 01 vs Apoapse for the First Earth Encounter - Up Cycler
O rbit.................................................................................... 34
35
Figure 19 AV vs Apoapse for the All Earth Encounters - Up Cycler Orbit ...........
Figure 20 Transfer Time vs Apoapse for 1st and 2nd Earth Encounters - Down
Cycler Orbit ........................................................................... 36
Figure 21 AV vs Apoapse for First Earth Encounter - All Circulation Orbits ........... 37
Figure 22 Transfer Time vs Apoapse for the Two Rendezvous Options ...
..........
37
Figure 23 AV vs Apoapse for the Two Rendezvous Options - All Circulation
Orbits .................................................................................. 38
Figure 24 AV vs Apoapse for All Mars Encounters - Down Cycler Orbit ..............40
Figure 25 Transfer Time vs Apoapse for Some Mars Encounters - Up Cycler
O rbit................................................................................... 40
Figure 26 AV vs Apoapse for Two Mars Encounters - All Circulation Orbits ............ 41
Figure 27 Transfer Time vs Apoapse for Two Mars Encounters - Up Cycler
Orbits .................................................................................. 42
Figure 28 AV vs Apoapse for All Phobos Encounters - VISIT Orbit ...................... 43
Figure 29
Figure 30
Figure 31
Figure 32
Figure 33
Figure 34
Figure 35
Figure 36
Figure 37
Figure 38
Figure 39
Figure 40
Figure 41
Figure 42
Figure 43
Figure 44
Figure 45
AV vs Apoapse for Two Phobos Encounters - All Circulation Orbits ......... 44
AV vs Apoapse for Two Rendezvous Options - All Circulation Orbits........44
Two-Impulse Transfer from L1 to the CASTLE ................................. 46
AV vs Transfer Angle for the L1 Encounters - Up Cycler Orbit................ 47
Two-Ellipse Transfer Between L1 and the CASTLE ............................ 48
Second Option on Two-Ellipse Transfer .......................................... 48
Difference Between Two and Three-Ellipse Transfer ....................... 49
AV vs Transfer Angle Comparing Three Methods for 6th L1 Encounter Up Cycler Orbit................................................................
..........50
Pseudo-Hohmann Transfer ......................................................... 51
Transfer With Hyperbola Below Parking Orbit...............................52
Pseudo-Hohmann Comparison to 3-Impulse for Earth Encounters ............ 53
Pseudo-Hohmann Comparison to 3-Impulse for Mars Encounters ............ 53
AV Penalty for Launch Delays for the 1st Encounters of Earth and Mars ..... 56
AV vs Position of 01 for All Earth Encounters - Down Cycler Orbit .......... 57
AV vs Position of 01 for the 2nd Earth Encounter - Up Cycler Orbit..........58
AV vs 01 for Two Rendezvous Options at Earth - Up Cycler Orbit ........... 59
AV vs Position of 01 for All Mars Encounters - Up Cycler Orbit..............59
Figure 46 True Anomaly of Spaceport versus the Apoapse for the 1st and 3rd
Earth Encounters of the Up Cycler Orbit ..........................
............. 61
Figure 47 True Anomaly of Spaceport versus the Apoapse for the 1st and 5th Mars
Encounters of the Up Cycler Orbit ................................................. 62
Figure 48 AV and Transfer Time vs Right Ascension of the V-infinity Vector .........64
Figure 49 Earth-Moon Cycler Orbit (Niehoff, 1986) ........................................ 70
LIST OF TABLES
Table 1 Up Cycler Orbit..........................................................................26
Table 2 Down Cycler Orbit....................................................................... 27
Table 3 VISIT Orbit ................... ............... .........................................28
Table 4 Parameter Partials for Earth Hyperbolic Intercept .....................66
Table 5 Parameter Partials for Earth Periapse Intercept ........ ..............
66
Table 6 Parameter Partials for Mars Hyperbolic Intercept ......
......................67
Table 7 Parameter Partials for Mars Periapse Intercept ....................................... 67
Table Al Right Ascension Variation for Hyperbolic Intercept........................ 80
Table A2 Right Ascension Variation for Periapse Intercept.............................80
Table A3 Declination Variation for Hyperbolic Intercept
...................................
80
Table A4 Declination Variation for Periapse Intercept ...................................... 81
Table A5 V-infinity Variation for Hyperbolic Intercept.............................81
Table A6 V-infinity Variation for Periapse Intercept.........................................81
Table A7 Parking Orbit Radius Variation for Hyperbolic Intercept ..................... 81
Table A8 Parking Orbit Radius Variation for Periapse Intercept ........................... 82
Table A9 CASTLE Closest Approach Radius Variation for Hyperbolic Intercept ........ 82
Table A10 CASTLE Closest Approach Radius Variation for Periapse Intercept ........... 82
Table All Right Ascension Variation for Hyperbolic Intercept ...................... 82
Table A12 Right Ascension Variation for Periapse Intercept.......................... 83
Table A13 Declination Variation for Hyperbolic Intercept....................................83
Table A14 Declination Variation for Periapse Intercept .........
................. 83
Table A15 V-infinity Variation for Hyperbolic Intercept .................................... 83
Table A16 V-infinity Variation for Periapse Intercept.........................................84
Table A17 Parking Orbit Radius Variation for Hyperbolic Intercept.............
.. 84
Table A18 Parking Orbit Radius Variation for Periapse Intercept ............................ 84
Table A19 CASTLE Closest Approach Radius Variation for Hyperbolic Intercept.......84
Table A20 CASTLE Closest Approach Radius Variation for Periapse Intercept .......... 85
1. INTRODUCTION
In 1990 President George Bush outlined goals for the US Space Program; the first goal
being a return to the Moon followed by the second goal of a manned mission to Mars.
Returning to the Moon would help to mature the technology needed to go to Mars. The
mission to Mars might then act as a forward base for further exploration of the solar
system.
To many, the goals are admirable ones and the missions will challenge the scientists and
engineers. One of the greater challenges is to overcome the problems associated with longterm human endurance in space. Preliminary studies have shown that a roundtrip to Mars
with a stopover time of about a month will take approximately two years to complete
(TRW, 1964, Niehoff, 1986, and Nock, 1987). Two years in the closed environment of a
spacecraft will definitely tax the physiological and psychological limits of astronauts. To
alleviate some of the stress, large CASTLEs (Cycling Astronautical Spaceships for
Transplanetary Long-duration Excursions) have been envisioned that carry crews to and
from Mars in relative comfort (Hollister, 1967 and Hoffman, 1986). The CASTLEs would
be properly shielded against radiation and provide artificial gravity to ensure the health of
the crew.
The CASTLE spacecraft would not be expendable but rather would be very durable ships
capable of being used for tens of years. The key to the CASTLEs and the missions to Mars
are the circulating or cyclical orbits which can be established between the Earth and Mars.
The work done in 1986 by Friedlander, et al. has shown that two practical types of
circulating orbits exist for the CASTLE to follow (Friedlander, 1986).
1.1
CIRCULATION ORBITS
Circulating orbits are an offshoot from planetary swingbys or gravity assisted orbits.
Some of the early pioneers in the study of planetary swingbys include R. H. Battin and G.
A. Crocco. Repeatable swingby orbits around the planets had been identified in the 1960s
(Rall, 1971, Hollister 1968, 69, and Ross, 1963). New variations to these orbits have
recently been found in which the CASTLE will be able to orbit between the Earth and Mars
with lower propulsive requirements. The two types of circulating orbits that have been
studied recently are VISIT (Versatile International Station for Interplanetary Transport)
orbits and Up/Down Cycler orbits (Niehoff (a,b), 1985 and 1986 and Aldrin, 1985).
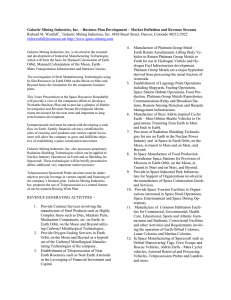
The VISIT types of circulating orbits which take advantage of the 2.14 year synodical
period of Mars, were first proposed by Niehoff in 1985. The VISIT-1 orbit encounters
the Earth every five years and Mars every 3.75 years. The VISIT-2 orbit encounters the
Earth every three years and Mars every 7.5 years. The transfer time for Earth to Mars or
Mars to Earth varies from 0.5 to 3.3 years. The retrograde shift of the encounter
longitudes of the Earth and Mars requires minor velocity corrections about every 15 years
for the VISIT class of orbits (Friedlander, 1986). See Figure 1 below.
Mars Orbit
Earth
Encountt
iters
Figure 1 VISIT Orbit (Friedlander, et al., 1986)
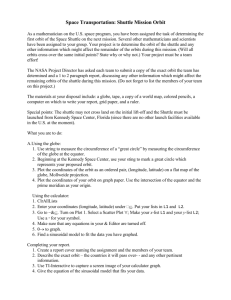
The Up/Down Cycler orbits, first proposed by Dr. E. E. Aldrin, are orbits which are
designed to exploit synodical precession of the line of apsides (Aldrin, 1985). The Cycler
orbits have more frequent encounters with the Earth and Mars but at the price of additional
AV requirements. Over a Cycler's 15 year cycle, three propulsive maneuvers have to be
used to supplement the no-cost, gravity assist swingbys of the Earth (Byrnes, 1990). In a
Mars mission scenario the two Cycler orbits have the same period but are oriented
differently in order to preserve short outbound and inbound transfer times. Either way the
Up Cycler (Earth-to-Mars) and the Down Cycler (Mars to Earth) transfers encounter the
Earth or Mars every 2.14 years with a transfer time of 0.43 years (Friedlander, 1986).
Figure 2 shows the trajectories of the CASTLE in the Up and Down Cycler Orbits. The
drawing-gives the heliocentric view of the Cycler orbits while the graph shows distance
from the Sun versus time for the Up Cycler orbit. The tic marks and numbers on the
drawing show the locations and order of the encounters. If the Mars encounters were
n Cycler
C'.
I-
C.)
0
5000
0000
3000
4000
1000
Time Fro m
n Start of Escalator (days)
Figure 2 Up and Down Cy ler Orbits (Friedlander, et al., 1986)
shifted to the descending leg of the repeating curve, the graph would represent the Down
Cycler orbit The combination of the two gives a clear indication of the timing of the Earth
and Mars encounters.
The circulating VISIT and Cycler orbits are well defined for continuing service between the
Earth and Mars. However, the trajectories to get on and off the circulating orbits have not
been studied in great detail. The CASTLEs follow the circulating orbits but they are not
designed to stop at the planet; they just pass close to the planet. A smaller 'Taxi' vehicle
transports crews from the CASTLE to the spaceport orbiting in the vicinity of the planet
and vice versa. The Taxi trajectories need to be optimized for hyperbolic approaches and
departures to account plane changes, time-phasing, and launch delays.
1.2 TAXI TRAJECTORIES
This thesis will focus primarily on the analysis of the Taxi trajectories with the goal to
optimize the planetocentric maneuver strategies for arriving at and departing from the
orbiting spaceports. The locations of the spaceports are important parameters to define.
Suggested locations for the spaceport around the Earth include Low Earth Orbit (LEO), the
Moon, an Earth-Moon Lagrangian point, the Earth-Sun Lagrangian point, and Earth-Moon
cyclic orbits. Suggested locations for the Mars spaceport include a near-Phobos location,
Sun-Mars L1 location, and highly elliptic orbits around Mars (Friedlander, 1986). See
Figures 3 and 4 which follow.
I r'
Rarth Orhit
w Lunar Orbit
L2
Orbit
Figure 3 Possible Earth Spaceport Locations
Phobos Ort
Low Martian Orbit
Figure 4 Possible Mars Spaceport Locations
This study will analyze the Taxi trajectories for the VISIT and Cycler orbits for spaceports
located in LEO, the Earth-Moon L1 point, a low Mars orbit, and Phobos. The VISIT and
Cycler orbits must first be reproduced to get initial conditions before the analysis to
determine the Taxi trajectories can begin. A parametric study will be performed to get an
insight into the general case: and the effects of plane changes, time-phasing, and launch
delays will be included in order to find the optimum transfers. The input parameters will be
varied over their limits, and the outputs will be examined and will be extrapolated to predict
the behavior of other encounter orientations.
The final results will be in the form of a set of Taxi trajectories for each spaceport. The
change in the total AV and transfer time of the trajectories for each encounter will be
analyzed. For one spaceport location at both Earth and Mars, the time phasing problem
will be examined in detail. Finally, the practical aspects of the Taxi trajectories will be
discussed with respect to the trade-offs between the two types of circulating orbits.
2.
ASSUMPTIONS AND METHODS
The stated problem of optimizing transfer between spaceports and vehicles in cycling orbits
requires that a number of assumptions be made to confine the solutions to more practical
possibilities. After the assumptions are stated, the operational constraints of the CASTLE
and Taxi spacecraft will follow. Lastly, the details of the circulating and taxi orbits will be
discussed along with the methods for optimizing the taxi trajectories.
As discussed and analyzed in the paper by Hoffman, et al. in 1986, a few assumptions
have to be made for this study of circulating orbits between Earth and Mars; and these
assumptions are summarized here for clarity. It is assumed that a permanently manned
base on Mars does exist and is in regular operation along with an orbiting spaceport or
space station in the vicinity of Mars to support hydrogen and oxygen mining on Phobos or
the Martian polar caps. It is also assumed that a spaceport is orbiting in the Earth-Moon
system to support Earth and Moon operations. Both spaceports will serve as staging points
for the Taxi spacecraft.
Mining for propellant (hydrogen and oxygen) on Mars or Phobos and on the Moon is
understood to be feasible and operational and will be the main source of hydrogen and
oxygen to get the Taxi spacecraft to and from the CASTLE. However, the location of the
propellant mining affects the location of the spaceports. In the near-Mars location the
spaceport could be located in a low Mars orbit or in a highly elliptical Mars orbit, if the
mining occurs near the Martian poles. If, on the other hand, the mining operations are
based on Phobos, then a spaceport in orbit near Phobos makes the most sense. In the
Earth-Moon system, the spaceport could be located at the Earth-Moon L1 Lagrangian point
or in a Earth-Moon cycler orbit, if oxygen is mined on the Moon. A low Earth orbit would
make sense if no mining occurred on the Moon. For this study each location mentioned
will serve as a possible staging point for the Taxi spacecraft on its journeys to and from the
CASTLE.
The specific purpose of this thesis is to find the families of optimum trajectories for the
Taxis which are traveling between the CASTLE and the designated spaceports. The
question is 'What optimization criteria should be applied in design of the Taxi trajectories?',
and the answer can be found in an examination of the purpose of the Taxi spacecraft. Its
name says much. The main mission of the Taxi is not to provide comfort for the crew but
to provide a quick, inexpensive way to get to the CASTLE. This provides one possible
optimization criterion: Find the trajectory which gets the Taxi from the spaceport to the
CASTLE (or vice versa) in the shortest amount of time. However, this minimum-time
approach is very costly in AV. Therefore, a trade-off study between time and AV is a more
appropriate approach to the problem of optimization. Limits on AV and transfer time will
have to be imposed in order to get meaningful results.
Before the search for the Taxi trajectories can begin, the VISIT and Cycler orbits have to be
generated to get the proper orbital elements during the approaches and departures around
Earth and Mars. The procedure for producing the orbits uses software developed by the Jet
Propulsion Laboratory's Mission Design section. A library of routines which aides
astrodynamic calculations exists in the Mission Design section. The routines are written so
that they can be integrated into other FORTRAN programs written on various computer
systems at JPL. The library also includes routines that solve Lambert's problem and
provide planetary ephemerides which are particularly useful for reproducing the circulating
orbits.
The VISIT and Cycler orbits will then provide initial or final boundary conditions
depending upon whether the Taxi is departing or arriving at the CASTLE. With the
boundary conditions defined at both the CASTLE and the spaceport, transfer taxi
trajectories can be generated between the two. The trajectories will then be subjected to
optimization schemes to find the optimum transfer(s).
3. OPTIMIZATION SCHEMES
Initially, two different optimization schemes, primer vector and parameterization, were
examined to determine which method works best under the present assumptions. Primer
vector theory finds the optimal trajectory based upon the magnitude of the vector containing
the three adjoint variables related to the velocity vector of the trajectory (Lawden, 1963 and
Lion, 1967). Parameterization may be used for a variety of variable constraint problems
such as totally unconstrained, linear constrained, and non-linear constrained. Each method
has many different solutions.
3.1 PRIMER VECTOR THEORY
The primer vector method was introduced in the early 1960s as a useful mathematical tool
to determine an optimal trajectory between two boundary points. The theory uses the
equations of motion and the position and velocity vectors at each boundary in a rectangular
Cartesian coordinate frame. The primer vector arises from the Lagrange multipliers used in
minimizing parts of the equations of motion (Lion, 1967).
The present structure of the problem at hand, i.e. getting from the CASTLE to a spaceport,
is not set up to handle a primer vector solution. Two boundary points do exist but they
result from the patched conic solution of the circulating orbits in a spherical coordinate
system. The boundary points could easily be changed into a rectangular Cartesian frame
with just position and velocity components. The primer vector theory could then be applied
to find an optimum trajectory. However, this technique does not aid in the visualization of
the problem and its solution.
The problem can be better visualized by realizing that the end conditions vary when any of
the initial conditions are changed. In the primer vector procedure, however, only the
components of position and velocity can be changed. A change in one of the initial velocity
components will change the trajectory, however, the effects of a change of, for example,
100 m/s in the y-component of the first boundary point is harder to visualize than the
effects of a change in the parking orbit apoapse (a Keplerian orbital element). For this
reason the primer vector theory was dropped in favor of parameterization.
3.2
PARAMETERIZATION
Parameterization, as its name implies, uses the various independent variables or parameters
of a problem to optimize the trajectory for some dependent variable. The Taxi trajectory
problem can be considered a non-linear constrained problem in which the starting and
ending points are constrained within certain limits, and the behavior of the variables is nonlinear. The parameters that will be used to optimize the Taxi trajectory come from the
patched conic analysis of the path of the Taxi.
The CASTLE approaches and departs the Earth or Mars on a planetocentric hyperbolic
path. Differences in the hyperbolic path for each fly-by makes each approach or departure
of the Taxi a different situation.
Ideally, the trajectory taken by the Taxi should be optimized for the smallest amount of
change in velocity (AV) in order to get from the spaceport to the CASTLE or vice versa for
a given transfer time. The Taxi can make as few as two velocity changes (a bum or
impulse) or as many as needed. However, fewer burns are desired for operational
simplicity. Somewhere between two and many burns is a number that has the potential to
give the smallest overall AV. Studies have been done that show a three-impulse technique
for transferring between elliptical (or circular) orbits and a given non-coplanar V-infinity
vector is better than one- or two-impulse transfer (Wilson, 1967, Penzo, 1988). The
advantage of the three-impulse transfer is that the additional impulse can be used to make
any needed plane change thus making the total AV less (Penzo, 1988). More than three
impulses does not significantly further reduce the total AV. The geometry of the threeimpulse transfer is shown in Figure 5.
3.3 THREE-IMPULSE STRATEGY
The three-impulse strategy patches together a number of conic trajectories in order to get the
desired trajectory. For a departure from a planetary circular or elliptical orbit to a given Vinfinity vector, an initial burn is made to transfer into a larger intermediate elliptical orbit.
Near the apoapse of the intermediate ellipse a second impulse is made to rotate the orbit into
the plane of the V-infinity vector. Finally, a third impulse is made to transfer from the
rotated intermediate ellipse to the orbit defined by the V-infinity vector.
The complexity of the optimization of the three-impulse trajectory is proportional to the
number of parameters used in the procedure. Assuming that the bums cause a velocity
impulse at a point, constraining the positions of the points affects the optimization
procedure. If all the impulses occur along the line of apsides and the flight path angles of
the hyperbola and ellipse match at the last burn, then no optimization of variables occurs.
This is not to say that an optimum trajectory could not occur in this situation, rather an
optimization process was not used. When the impulses are not constrained and are
CASTLE Hyperbola
pulse
Figure 5 Three-Impulse Trajectory (Gerbracht, 1968)
positioned away from the line of apsides, the trajectory can be optimized. The transfer can
be optimized with more variables by not constraining the flight path angles of the ellipse
and hyperbola to exactly match at the third impulse and by allowing some of the plane
change to be taken out at the first burn.
A number of programs were examined to determine their usefulness with respect to this
problem. A program written by Paul Penzo and modified by Andrei Sergeyevsky both of
JPL, finds one-, two-, and three-impulse transfers, but only the two-impulse transfer is
optimized. Sam Wilson from NASA/JSC has developed a quasi-optimum three-impulse
trajectory program which minimizes total AV by optimizing the placement of the second
impulse. The program also constrains the first and third impulses to be colinear while
forcing the flight path angles to match at the third impulse. The third program considered
was written in 1968 by R. Gerbracht from TRW. This program optimizes the threeimpulse trajectory by minimizing AV over five variables (Gerbracht, 1968) and seems to be
the best candidate for solving the problem. However, the geometry of the Taxi trajectories
with respect to the planetary parking orbit and the V-infinity vector should be further
analyzed before an attempt is made to find optimal transfers using the programs mentioned.
4. CASTLE APPROACH SCENARIOS
As was stated earlier, every arrival or departure opportunity is different because of the
different fly-by hyperbolic trajectory of the CASTLE as viewed from the planet. The
characteristics of the parking orbit also play a part in the design of the Taxi trajectory.
VISIT and Cycler orbits produce different fly-bys so approaches/departures will be
discussed in reference to various combinations of circulation orbit, planet, and spaceport
position.
The approaches to the planet are the inbound legs of the hyperbolic fly-bys, and the
departures are the outbound legs. The Taxi can rendezvous with the CASTLE hyperbola
on either the outbound or inbound leg. The Taxi could rendezvous with the CASTLE on
its inbound leg, but the mismatch of flight path angles would make the rendezvous
expensive in AV. The Taxi could also fly a retrograde trajectory to meet the CASTLE on its
inbound leg. However, the Taxi has to essentially stop and then speed up in the other
direction just to catch the CASTLE. Rendezvousing with the CASTLE at its periapse or
along its outbound leg is both easier because no retrograde orbit is used and more
economical because the Taxi only has to speed up. The same reasoning is used to justify
leaving the CASTLE on its inbound leg when rendezvousing with the spaceport. Whether
the rendezvous is with the CASTLE or the spaceport, the three-impulse strategy is the
same. Therefore, an approach can be considered the same as a departure except that the
order of the burns is reversed.
4.1 LOW PLANETARY PARKING ORBITS
The following sections examine the relative orientations of low planetary parking orbits and
the hyperbolic fly-by of the CASTLE. For the low planetary parking orbits, the Taxi can
use two approaches to rendezvous with the CASTLE. The first is rendezvousing with the
CASTLE at the periapse of the hyperbolic fly-by (see Figure 6). The second approach
allows the Taxi to get on its own hyperbolic escape trajectory and then rendezvous with the
CASTLE later. Figure 7 shows this option. This option requires a fourth impulse at the
intersection of the hyperbolas.
Hyperb
Planet
Transfer ellipse
Impulse
Figure 6 Two Dimensional Rendezvous at Periapse
Selecting a rendezvous option becomes a trade-off task. Rendezvousing at periapse has a
higher AV than the hyperbolic intercept but, in most cases, an additional one to two days is
cut off the transfer time by using this option.
4.1.1 Earth Fly-by of Cycler Orbits
The Cycler orbits come within 1.2 to 1.9 Earth radii which means the closest approach
radius is between approximately 7650 km and 12,120 km. A Low Earth Orbit (LEO) is
established at a tentative Space Station altitude of 370 km (Sharma, 1990, Henry, et al,
1989, and Sergeyevsky, 1989). The geometry between the V-infinity vector and the
parking orbit allows the three-impulse trajectory to be implemented quite easily. The only
tradeoff to be made is whether to meet the CASTLE at its perigee or to intercept the
CASTLE later on an intersecting hyperbola.
CASCTLE
PHvnerhnblic (Whit
-s.
Planet
Detail of Hyperbola
Intercept
Parking Orbit
Transfer ellipse
Impulse
Figure 7 Two Dimensional Rendezvous at Intersection of Hyperbolas
4.1.2
Earth Fly-by of VISIT Orbit
The VISIT orbits come within 40 to 270 Earth radii which translates to approximately
255,000 km to 1,722,000 km. Assuming that the LEO is the same circular 370 km orbit a
tradeoff again has to be made between AV and time. The closest approach radius is so
large in some cases that transfer time using the three-impulse trajectory would be about the
same for both the intercepting hyperbola option and the intercept at periapse option. This
situation will be analyzed further when the actual transfer AVs and times are calculated.
4.1.3
Mars Fly-by of Cycler Orbits
For Mars, the Cycler orbits close within 1.3 to 29.1 Mars radii (4420 km to 99,000 km).
A circular orbit around Mars was arbitrarily selected at an altitude of 200 km. The
geometry between the parking orbit and the V-infinity vector is very similar to the
orientation around the Earth. Therefore, the three-impulse trajectory can also be applied to
this situation. Similar to the argument for Earth fly-bys, a tradeoff has to be made between
meeting.the CASTLE at its perigee or whether to intercept the CASTLE later on an
intersecting hyperbola. Again the perigee intercept is expected to cost more AV but the
hyperbola intercept requires a longer transfer time.
4.1.4
Mars Fly-by of VISIT Orbit
The CASTLE passes within 5100 km to 77,200 km (1.5 to 27.2 Mars radii) when it
follows the VISIT circulating orbit. When the closest approach is greater, the time saved
by rendezvousing directly with the CASTLE (rather than getting on the hyperbola that
intersects the CASTLE's path at a great distance) becomes smaller. Even though the
periapse of the CASTLE may pass at a large distance from Mars, that geometry does not
prevent the three-impulse trajectory from being used.
4.2 PHOBOS ORBIT
A spaceport is located in the orbit of Phobos which has a semi-major axis of 9400 km and
an inclination of 10. The spaceport will be trailing Phobos far enough to avoid any adverse
the gravitational perturbations.
4.2.1
Mars Fly-by of Cycler Orbits
The radius of closest approach for the Mars fly-by of the Cycler orbits vary from 4420 to
99,000 kmn. Since the altitude of Phobos is a medium altitude as compared to a low Mars
orbit or a very high Mars orbit, the hyperbolic fly-by of the Cycler orbits may pass through
the interior or the exterior of the orbit of Phobos. In either case, the three-impulse
procedure works well because the geometry of the situation fits the normal profile used by
the method. There are three intercept options to be considered. The Taxi can intercept or
rendezvous with the CASTLE at nearly the same altitude, outside the Phobos orbit, or
inside the Phobos orbit. In other words, the Taxi can rendezvous with the CASTLE at the
periapse of its hyperbolic fly-by no matter what the periapse radius is in comparison with
the radius of the spaceport's orbit. Alternately, the Taxi can get on an intercept hyperbola
at the radius of Phobos' orbit allowing the Taxi to rendezvous with the CASTLE later. The
third option is the Taxi can lower its periapse while doing a plane change at the second
impulse to establish an intercept hyperbola with a periapse considerably lower than
Phobos' orbit. See Figure 8 for the periapse and the low hyperbola rendezvous.
4
Periapse Rendezvous
Low Hyperbolic Rendezvous
Figure 8 Two Rendezvous Options for the Taxi Around Mars
4.2.2 Mars Fly-by of VISIT Orbit
For this scenario it is assumed the CASTLE flies past Mars at distances of 5100 km to
77,200 km, and the spaceport is established in Phobos' orbit at 9400 km. Two of the
VISIT encounters pass below the orbit of Phobos so three rendezvous options can be used
in some of these encounters. A three-impulse Taxi trajectory variation should work well in
all the orientations of the parking orbit and the V-infinity vector of the CASTLE hyperbola.
Another tradeoff between three options occurs here. The Taxi can try to meet the CASTLE
at the periapse of the hyperbolic fly-by. The Taxi can get on an intercept hyperbola at the
radius of Phobos' orbit. The third option is the Taxi can lower its periapse while doing a
plane change at the second impulse and then get on an intercept hyperbola with a periapse
considerably lower than Phobos' orbit.
4.3 LI LAGRANGIAN POINT
The Lagrangian points have been mentioned previously as locations for spaceports but
without much rationale. The Lagrangian points are a set of stable and unstable equilibrium
points in the Earth-Moon system. They are not unique to the Earth-Moon system but are
present in any two or more body system. The points arise from the equations of
gravitational attraction between any two bodies. The positions of the points are shown in
Figure 9.
LA
L3
L1MO
MOON
EARTH
(not to scale)
L5
Figure 9 Lagrangian Point Positions in the Earth-Moon System
Points 4 and 5 are stable while points 1,2, and 3 are unstable. In practical terms, an object
placed at L4 or L5 will remain there in the absence of outside perturbations. At L1, L2,
and L3 an object can remain at that point with a small expenditure of energy (Brykov,
L2
1981). Section 6.4 will go further into detail about the practical aspects of a spaceport at
L1.
The answer to the question "why would anyone want to put a spaceport at a Lagrangian
point?" is not part of this analysis. Other studies have concerned themselves with the
practical aspects of spaceport operations at Lagrangian points (Hoffman, et al., 1986).
Another article in a recent Air and Space mentions using L2 as a spaceport location in
conjunction with cycler orbits (Aldrin, 1990).
4.3.1 Earth Fly-by of Cycler Orbits
The previously described Cycler orbits would pass inside the orbits containing the
Lagrangian points. Given that the L1 Lagrangian point is at a distance of 326,000 km from
the Earth, the Taxi would follow a trajectory whose periapse would be well inside the L1
distance. A three-impulse trajectory is not practical here since all the plane change could be
taken out in the first impulse because the Taxi is so far from the Earth. The plane change
statement is based upon a spaceport being located at L1 with the capability of launching the
Taxi in any direction. A two-impulse trajectory is an appropriate approach. However,
most of encounters with the Earth will require trajectories that use non-apse bums because
the relative orientations will not support pseudo-Hohmann trajectories. Figure 10 shows
two of the possible encounter geometries for a spaceport located at L1.
Hyperbolic CASTLE Orbit
•m
-6
0
ioJ
Figure 10 Various Positions of L1 with Respect to the CASTLE Hyperbola
Up to this point not much has been said about spaceport orbits with fixed phasing but a
spaceport at L1 would have specified phasing. L1 sweeps out the same angle as the Moon
does in its orbit, so the position of L1 can be predicted with planetary tables. The timing of
the Taxi transfer becomes more critical than in the other transfers in which the parking
orbits had unspecified phasing. The two-impulse Taxi trajectories and the phasing problem
will be discussed further in Section 6.4.
4.3.2 Earth Fly-by of VISIT Orbit
The VISIT orbits pass the Earth at a radius of 250,000 to 1,722,000 km. In order to catch
the CASTLE at its closest approach, a Taxi leaving L1 would have to follow a trajectory
which would require the lowering of the perigee from the L1 altitude or raising apogee as
the CASTLE approaches the distance dictated. In some cases a pseudo-Hohmann transfer
might be feasible, but a two- or three-impulse trajectory with an intercepting hyperbola
would be the general scenario (see Figure 11).
I
Figure 11 Possible Taxi Trajectories To and From L1
The majority of the cases presented in this section can be solved by a variation of the threeimpulse transfer: meeting the CASTLE at its periapse or intercepting the CASTLE
hyperbola with another hyperbola. When the phasing of the initial spaceport is known (L1
and Phobos parking orbits), the three-impulse transfer will be expanded to include an
additional iteration step to ensure that the Taxi trajectory has the right conditions to
rendezvous with the CASTLE. More will be said about this added step in Section 7.3.
The Cycler orbits both span 15 years and both start and end at the Earth which means the
first planetary encounter will occur at Mars. For both the Up and Down Cycler orbits there
are seven fly-bys of Mars and six of Earth. For the postulated VISIT orbit the time
spanned is about 20 years, beginning and ending at Earth. The fly-bys are not as frequent
as the Cycler orbits being five Mars fly-bys and three Earth fly-bys. The following tables
contain the relevant information for all the encounters used in this study. The data was
generated using a FORTRAN program using initial conditions from the paper by Hoffman,
et al. The declination and right ascension in the following tables are measured from the
planet's equator and equinox of epoch.
Table 1 Up Cycler Orbit
Encounter
Planet
Date
Periapse
radius
(km)
V-infinity Declination
Right
magnitude (incoming Ascension
(km/sec)
outgoing) (incoming
(deg)
outgoing)
(deg)
Mars
1 May 97
19541.41
10.73
-15.71
13.58
285.88
105.73
Earth
1 Jan 99
8505.39
5.92
14.83
16.74
160.21
43.26
Mars
28 May 99
98940.0
11.75
14.76
-14.72
246.91
67.06
Earth
8 Feb 01
7650.0
6.18
-8.35
33.70
197.85
101.80
Mars
6 Jul01
4420.0
10.22
18.42
-17.63
305.06
130.40
Earth
16 Apr 03
7650.0
5.67
-31.01
18.38
253.43
175.36
Mars
12 Sep 03
4420.0
7.23
33.94
-34.60
356.41
193.30
Earth
7 Jul 05
7650.0
5.87
-19.44
-25.81
335.41
240.09
Mars
13 Dec 05
11560.0
6.05
-4.04
2.77
87.37
274.30
IEarth
6 Sep 07
12000.0
5.87
16.99
-36.67
32.85
290.05
Mars
16 Feb 08
21812.20
7.47
-11.47
7.87
201.20
22.17
IEarth
10 Oct 09
11986.78
5.89
32.99
-30.96
73.99
324.41
Mars
28 Mar 10
17163.92
8.66
-17.78
14.20
240.71
61.37
Table 2 Down Cycler Orbit
Encounter
Planet
Date
Periapse
radius
(km)
Right
V-infinity Declination
magnitude (incoming Ascension
(km/sec)
outgoing) (incoming
outgoing)
(deg)
(deg)
Mars
20 Jan 97
18705.71
8.53
28.92
-32.40
71.63
251.24
Earth
9 Jul 97
11418.15
5.92
-18.50
-10.83
354.94
227.92
Mars
7 Mar 99
31960.0
7.37
25.05
-27.66
117.14
297.87
Earth
17 Aug 99
8930.0
5.98
-1.02
-25.78
21.23
272.22
Mars
15 May 01
17680.0
6.60
-37.86
39.60
222.13
45.27
Earth
8 Oct 01
7650.0
5.87
21.28
-16.31
53.31
346.13
Mars
7 Aug 03
4420.0
7.3
-71.11
71.82
315.42
166.23
Earth
2 Jan 04
8930.0
5.39
28.73
14.02
146.74
51.35
Mars
10 Oct 05
4420.0
9.96
-20.61
18.97
19.84
206.35
Earth
12 Mar 06
9840.26
5.45
-6.50
27.64
214.35
105.63
Mars
19 Nov 07
28560.0
11.59
18.53
-19.88
358.78
178.88
Earth
16 Apr 08
9567.0
5.96
-29.23
21.38
260.0
152.36
Mars
13 Dec 09
17149.82
10.55
16.62
-18.92
24.27
203.19
Table 3 VISIT Orbit
Encounter
Planet
Date
Periapse
radius
(kIn)
1
Mars
5 Jan 98
8160.0
4.03
1.17
-1.08
1.73
135.30
2
Earth
21 Mar 01
43727.69
4.19
-41.52
80.64
195.47
37.67
3
Mars
28 Oct 01
5021.35
4.09
24.08
14.79
333.78
147.15
4
Mars
20 Jun 05
52266.74
4.08
-3.30
-.76
350.71
167.17
5
Earth
13 Apr06 945164.26
4.42
-18.03
19.80
233.86
52.11
6
Mars
18 Apr 09
68000.0
3.79
-4.02
2.58
327.88
143.99
7
Earth
6 Apr 11
711784.8
4.23
-50.10
45.88
212.64
32.43
8
Mars
30 Dec 12
92480.0
3.84
-.28
1.19
341.06
159.51
V-infinity Declination
magnitude (incoming
(km/sec)
outgoing)
(deg)
L_(deg)
Right
Ascension
(incoming
outgoing)
5. THREE-IMPULSE PROGRAM
The foundation for the three-impulse trajectory program used to find the Taxi trajectories is
the routine described in a 1968 TRW memo. The routine became the "Generalized ThreeImpulse Processor (GTIP)" which served as a fast, stand alone module that could easily aid
any planetary mission planning (Gerbracht (b), 1968). The actual working program or
program listing could not be produced so the equations from the memo were used as a
basis for the program used here. Gerbracht and Penzo's papers provide a complete
discussion of the original routine. A brief explanation of the program used follows. A
listing of the equations and a program listing can be found in the appendices.
The parking orbit is defined by its periapse, apoapse, latitude, and longitude with respect
to some reference frame. The V-infinity vector is defined by its magnitude, latitude, and
longitude with respect to the same reference frame. Other initial conditions include the
inclination and ascending node of the parking orbit and the apoapse of the intermediate
ellipse. See Figure 12 for a description of the orientation of the initial conditions.
Iv'
rp = periapse of parking orbit
V. = V-infinity vector
L = realtive declination
oa.= angle between ip and V*
Q = ascending node
i = inclination
t..= declination of V..
1.*= right ascension of V*.
Pp = latitude of Ip
hp = argument of periapse
Figure 12 Initial Conditions (Gerbracht, 1968)
A transfer of coordinates from planetary latitude and longitude to relative coordinates
between the parking orbit and the V-infinity vector is made before the optimization of the
five variables is begun. The variables are: 1) 01 - angle between the V-infinity vector and
the first impulse, 2) AP - the change in flight path angle at the first impulse, 3) AA1 - the
plane change of the first impulse, 4) T12 - the angle between the periapse of the intermediate
ellipse and the second impulse, and 5) r13 - the angle between the periapse of the
intermediate ellipse and the third impulse. A "Golden ratio" algorithm is used to find the
minimum of the function used to calculate AV (Wilson, 1990). First r13 is optimized using
the algorithm to find the minimum AV3. Then the three variables 01, 112, AA1 are
optimized in a linear walk fashion, one variable at a time so that the change in total AV is
less than 1 m/sec. Each time one of the three variables above is optimized, 113 is also
optimized. Finally, AL3 is optimized in the outermost loop so that the change in total AV is
less than 1 m/sec. Each time the outer loop is performed, the entire four variable
optimization above has to be done. A more detailed explanation of the optimization process
can be found in the reference by Gerbracht and Penzo (1968). Figures 13, 14, and 15
depict the details of the 1st, 2nd, and 3rd impulses.
Int
1st Impulse
Figure 13 Detail of First Impulse (Gerbracht, 1968)
The Golden Ratio is related to the Golden Section, and both are roots of the Fibonacci
quadratic equation. Its interesting applications and historical origins can be found in the
references (Vajda, 1989, Battin, 1987, and Hoggatt, 1969). The algorithm's main
advantage is the need to calculate only one value each iteration because the other value in
the search is used from the previous iteration. However, the Golden Ratio minimization
routine only works well when the function has one minimum, but it will not find the
absolute minimum in a series of minimums (Wilson, 1990). The present situation was not
guaranteed to have single minimums so a number of alternate test routines were run to
verify the entire program. The function to be minimized was given a series of inputs over
the range searched by the original program. The minimum value of the function found by
the test was compared to the value found by the program. No major discrepancies were
encountered during the verification process.
Periapse of 1st
Intern
k2
dImpulse
Figure 14 Detail of Second Impulse (Gerbracht, 1968)
Figure 15 Detail of Third Impulse (Gerbracht, 1968)
6. APPLYING THE PROGRAM
The CASTLE passes by Earth or Mars at various altitudes which range from near surface
(= 2000 km) to very high altitudes (= 700,000 km for Earth and = 100,000 km for Mars).
The transfer with the shortest transfer time will rendezvous with the CASTLE at its
periapse (See Figure 6 in Section 4.1). However, if the periapse is quite high, the transfer
time increases a great deal. In that case a separate hyperbolic escape trajectory can be used
to intercept the CASTLE at some far distance like the sphere of influence where
perturbations would be smaller than if the intercept occurred close to the planet (see Figure
7). The program used both options in all encounters. Then the trade-offs between the two
intercept options and between AV and transfer time can be examined.
The spaceport orbits to be discussed in this section are a low Earth orbit, a low Mars orbit,
and a Phobos orbit. The scenarios with the spaceport located at L1 will be discussed later
because .the three-impulse program is not well suited to look at the behavior of the Taxi
trajectory. The graphs presented in this section give a sense of the behavior of AV, time
and 01 vs the apoapse of the intermediate ellipse. Appendix A contains the graphs for all
the encounters for all the circulating orbits. The comments made in this section refer to the
graphs presented in the main text but are backed by the graphs in the appendix. The tradeoff between transfer time and AV has to be determined from the data in the graphs. Also,
the choice between a hyperbola rendezvous and a periapse rendezvous has to be made for
each encounter based upon these graphs.
6.1 SPACEPORT IN LOW EARTH ORBIT
The placement of the spaceport in low Earth orbit is important because of the concerns with
getting supplies from Earth's surface or the Moon. The consensus of researchers in the
area of circulating orbits reason that the easiest orbit to get into is one launched from Cape
Canaveral (Friedlander, 1990). Buzz Aldrin's recent article in Air and Space mentions the
use of Space Station Freedom as a possible spaceport for staging from LEO (Aldrin,1990).
The Low Earth Orbit used for this study was a potential Space Station circular orbit of 370
km inclined at 28.50.
6.1.1
Cycler Orbits
The program was applied to the first fly-by of the Earth by the CASTLE in the Up Cycler
orbit. The fly-by was characterized by a V-infinity vector with magnitude 5.92 km/sec,
inclination 14.830, right ascension 160.210 and a periapse radius of 8505.39 km.
The orbit of the spaceport was assumed not to be defined in time (i.e. it had unspecified
phasing and its orbit did not regress because of the Earth's oblateness). Later the spaceport
orbit will have a specified phasing to examine actual trajectories between the Taxi and the
CASTLE. The main independent variable was the apoapse of the intermediate ellipse (ra')
which was varied to achieve a spread of transfer times and total AV. Values from 50,000
to 300,000 km were input into the optimum three-impulse trajectory program. A graph of
AV vs ra' is shown in Figure 16. The program gives the optimum angular distance (01)
between the longitude of the first impulse and the longitude of the V-infinity vector.
A comment should be made at this time about the presentation of data. When looking at
interplanetary trajectories, the common method of graphical presentation are contour plots
of C3 for launch and arrival dates in reference to some other parameters such as declination
or right ascension of launch and arrival V-infinities. The key to the contour plots is that the
V-infinity vector changes for each combination of launch and arrival dates. The vector is
never one set value as it is here for each encounter. Therefore, the data can not be presented
in a contoured format but will show a profile of a single V-infinity contour.
The graph depicting AV vs Apoapse in Figure 16 shows nothing unusual. The total AV
decreases as the apoapse of the intermediate ellipse increases. This happens because the
plane change at the second impulse becomes less costly as the distance from the Earth
increases. The transfer time shown in Figure 17 on the following page has the opposite
result. As the apoapse increases, the time for the entire transfer increases also.
A
S
II
I
I
ii
I(I
I I
II
i I
0
2108
i I0
I I
I
I
I
I IIII ii
I
i
l
4.775
4.75
4.725
A 7"
4.-,
I IIIII
0
I7
70000
I 1I
140000
210000
280000
1
t--
00lll
350000
Apoapse of Intermediate Ellipse (km)
Figure 16 AV vs Apoapse for the First Earth Encounter - Up Cycler Orbit
200
175
h 150
o125
100 I
9;
F1
50
25
0
0
70000
140000
210000
280000
350000
Apoapse of Intermediate Ellipse (kmn)
Figure 17 Transfer Time vs Apoapse for the First Earth Encounter - Up Cycler Orbit
128.6
128.4
bO
a)
128.2
128
.1
127.8
0
127.6
127.4
127.2
0
70000
140000
210000
280000
350000
Apoapse of Intermediate Ellipse (kmn)
Figure 18 Optimum 01 vs Apoapse for the First Earth Encounter - Up Cycler Orbit
If Figure 13 is recalled along with the explanation of the three-impulse optimization routine,
01 is the angle between the first impulse and the projection of the V-infinity vector onto the
parking orbit plane. According to Figure 18, 01 follows a smooth path upward as the
apoapse increases but as the apoapse reaches its largest values, 01 experiences some
discontinuities. Although not confirmed, the discontinuities may arises from the numerical
procedures in the optimization process (e.g. the tolerances on various comparisons).
Figure 19 combines all the Earth encounters for the Up Cycler Orbit. The behavior of the
AV is identical to Figure 16. Two things should be noted here. The first is in the legend
where the encounter numbers, El, E2, etc., are followed by 'hyp'. That identifies the plot
as depicting the intercept hyperbola option (see Figure 7). This option requires an
additional rendezvous (fourth) impulse at the Earth's sphere of influence to rendezvous
with the CASTLE. The second are the differences between the curves for the different
encounters. The flatter curves represent encounters where the relative declination between
the parking orbit inclination and the declination of the V-infinity vector are small. Smaller
relative declinations mean a smaller plane change and thus a smaller second impulse.
-
El AV hyp
4.85
AV
hyp.E2
E3 AV hyp
E43 AV hyp
4.8
E5 AV hyp
4.75
E6 AV hyp
4.7
4.65
4.6
4.55
0
70000 140000 210000 280000 350000
Apoapse of Intermediate Ellipse (km)
Figure 19 AV vs Apoapse for the All Earth Encounters - Up Cycler Orbit
Figure 20 depicts the Taxi transfer time for rendezvousing with the CASTLE versus the
increasing length of the apoapse. This graph differs from the one in Appendix A because
both the hyperbolic and the periapse rendezvous options are shown. In Appendix A, the
transfer time is only the time up to the third impulse which does not include the additional
time it takes for the Taxi to travel along its hyperbola toward the rendezvous with the
CASTLE. The additional time on the hyperbolic rendezvous case is a constant 41.48 hours
for the first Earth encounter on the Down Cycler orbit and 41.04 hours for the second
encounter. The difference in the time between the two encounters is a result of the different
V-infinity vectors.
0
70000
140000
210000
280000
350000
Apoapse of Intermediate Ellipse (kmn)
Figure 20 Transfer Time vs Apoapse for 1st and 2nd Earth Encounters - Down Cycler
Orbit
6.1.2
VISIT Orbit
The program was applied next to the first Earth approach of the VISIT orbit. The fly-by
was characterized by a V-infinity vector with magnitude 4.19 km/sec, inclination -41.52',
and right ascension 195.470. The spaceport was in a circular 370 km Earth orbit inclined at
28.50. Figure 21 shows AV vs Apoapse length for the first Earth encounter of the VISIT
orbit .
The figure also includes Earth encounters from the Up and Down Cycler orbits for
comparison. The AV is much lower for the VISIT orbit than the Cycler orbits because the
magnitude of the V-infinity vector is on the average 1 km/sec slower (see Tables 1,2, and
3). The VISIT curve is steeper because of its large initial relative declination.
5.2
5
4.8
4.6
4.4
4.2
4
0
70000
140000
210000
280000
350000
Apoapse of Intermediate Ellipse (kmn)
Figure 21 AV vs Apoapse for First Earth Encounter - All Circulation Orbits
250
200
150
100
0
70000
140000 210000 280000
Apoapse of Intermediate Ellipse (kin)
350000
Figure 22 Transfer Time vs Apoapse for the Two Rendezvous Options
Figure 22 page is the corresponding transfer time versus apoapse graph for all three
circulating orbits. The first Earth encounter is shown for the Down Cycler and the both the
Cycler orbits are almost identical because the V-infinity vectors for the encounters are fairly
similar. The time for the periapse rendezvous of the VISIT orbit is longer because of the
higher periapse radius of the CASTLEs fly-by. Again the time for the hyperbolic
rendezvous option is higher.
Figure 23 is a continuation of the circulation orbit comparison. The graph shows AV vs
Apoapse for the second Earth encounters for the Up and Down Cycler orbits and the first
Earth encounter for the VISIT orbit. Hyp is the hyperbolic intercept case and peri is the
CASTLE hyperbola periapse rendezvous case. The added fourth impulse for the
hyperbolic intercept case is on the order of 100 m/sec and increases with the radius of the
CASTLEs closest approach. The AV for periapse rendezvous case also increases with the
closest approach radius.
7
6.5
6
5.5
5
4.5
4
0
70000
140000
210000
280000
350000
Apoapse of Intermediate Ellipse (km)
Figure 23 AV vs Apoapse for the Two Rendezvous Options - All Circulation Orbits
More than likely, two Taxis will rendezvous with the CASTLE at each encounter. A
manned Taxi will transfer the crew and an unmanned Taxi will transport supplies. AV
requirements need to be minimized for both Taxis but transfer time is more critical on the
manned Taxi. The shorter transfer time will expose the crew to less space radiation and
less time in a zero-g environment. The unmanned Taxi does not have to worry about the
radiation so it can take a longer time to rendezvous. This means that the manned Taxi will
have to expend extra AV to use the periapse rendezvous to avoid the extra 40 hours of
exposure the hyperbola intercept causes (24 hours for Mars encounters). The cargo Taxi
can use the hyperbola intercept to take advantage of the lower AV values without having to
worry about exposure time.
6.2 SPACEPORT IN LOW MARS ORBIT
The spaceport orbit around Mars was arbitrarily chosen to be at an altitude of 200 km with
00 inclination. A base on Mars would most likely be located at the equator to take
advantage of the planetary rotation when launching from Mars to orbit. This section will
follow a similar format as Section 6.1 when discussing the behavior of the different
encounters at Mars.
6.2.1
Cycler Orbits
For a spaceport located in a low Mars orbit the curves for AV vs Apoapse are relatively flat
as compared to the graphs for Earth (See Figure 24 on the following page). The figure
shows all the encounters of Mars by the CASTLE on the Down Cycler orbit. The curves
are flatter than those for Earth encounters because the parking orbit has 00 inclination so the
relative declination varies less.
A comparison of the Up and Down Cycler orbits show that for Mars the Down Cycler orbit
has lower AV values for many of the encounters. The figures in Appendix A substantiate
this. The lower AV values make the Down Cycler orbit more economical than the Up
Cycler orbit for return trips because the Taxi will not have the larger V-infinity magnitudes.
See Tables 1 and 2 and consult the references by Friedlander and Hoffman for a detailed
discussion of this topic.
Figure 25 shows the transfer times for four Mars encounters of the Up Cycler Orbit. The
times, from the hyperbolic rendezvous option, all follow a similar curve but initial times
vary from 25.1 hrs to 37.7 hrs.
-Ml
-M2
-M3
-M4
-M5
-M6
-M7
8
0
50000
100000
150000
200000
AV
AV
AV
AV
AV
AV
AV
hyp
hyp
hyp
hyp
hyp
hyp
hyp
250000
Apoapse of Intermediate Ellipse (kim)
Figure 24 AV vs Apoapse for All Mars Encounters - Down Cycler Orbit
I I I I
350
-M2 time hyp(4)
- e-MS time hyp(4)
300
250
I--------------
-. -
M6 time hyp(4) .........................
.....
-*-
M7 time hyp(4)
200
150
.. .. . .. .. . .. .. .
100
. . . . . . . . . .
50
0
-------------------------
. . . .
-------------
.........................................................
I
I I
I
I
I
50000
I
II
I I I 1 1 1 1i
100000
150000
I
I
200000
250000
Apoapse of Intermediate Ellipse (kin)
Figure 25 Transfer Time vs Apoapse for Some Mars Encounters - Up Cycler Orbit
6.2.2
VISIT Orbit
Figure 26 shows a comparison between the Up and Down Cycler orbits and the VISIT
orbit for AV vs Apoapse length. The encounters were selected to show that , for the most
part, the Up Cycler encounters have higher AV totals than either the Down Cycler or the
VISIT encounters. The number following the Up, Down, or VISIT indicate the encounter
number.
-n-C-Up
1
.................................................................
..
.....
--- --Down 1
........................
---...................................
VISIT
--
Up 2
S---..-Down 2
VISIT 2
-------
...
h.
........
..L.
..............
........
.
..
.
.
m
m
: -7
0
I
I
..
II----------I
....
I-T-T-r
I...
50000
100000
..-----------
II
150000
1 11
200000
FlT7
250000
Apoapse of Intermediate Ellipse (km)
Figure 26 AV vs Apoapse for Two Mars Encounters - All Circulation Orbits
6.3 SPACEPORT NEAR PHOBOS
As mentioned before, the location of a spaceport near Phobos would support a fuel mining
operation. The orbit of Phobos is inclined approximately 10 and has a semi-major axis of
=9400 lan. The spaceport would be located very near Phobos but not near enough to run
into any gravitational attraction problems.
A third intercept option exists for the Taxi, besides the periapse intercept and the hyperbolic
intercept, in which the three-impulse trajectory would be followed, except the second
impulse would not only perform a plane change but also lower the periapse from =9400 km
to 3600 km. The lower periapse will lower the total AV because the speed at a 3600 km
radius is much faster than at 9400 km. The gain in speed cuts the third impulse which
moves the Taxi onto a hyperbolic escape path.
6.3.1
Cycler Orbits
For the encounter at Mars on the Cycler orbit with the spaceport near Phobos, the threeimpulse program has produced optimum values of 01 for a range of ra' from 20,000 km to
200,000 km. Appendix A contains the graphs of the Cycler orbits for AV, time, and
optimum 01 vs the apoapse of the intermediate ellipse. Figure 27 gives a sample of the
transfer times for the Taxi trajectories seen in the Mars encounters of the Down Cycler
orbit. The transfer times are for the first and second Mars encounters for a spaceport in
Phobos' orbit and include the hyperbolic and low hyperbolic rendezvous options. The low
hyperbolic rendezvous has a periapse below the radius of Phobos' orbit. The transfer
times in this graph do not include the approximately 19 extra hours it takes the Taxi to go
along its hyperbola to rendezvous with the CASTLE. The time comparison for the two
rendezvous options reveals nothing concrete because in one encounter the transfer time for
the normal hyperbolic option is longer than the low hyperbolic option while in the other
encounter the opposite is true. The times all depend upon the initial orientations of the Vinfinity vector.
mII I I
350
-"---pl
time low
tc
---v-p 2 time hyp
-
----------------------------------------------............ ...............................
-
-----..
.......
.-
150 -
C
r
r
p2 time low
--
200
I I........
r
300 250
S
pl time hyp
---------
.................................................................
.. ..........
C
F
...............
...........
100 - ..................................................
t
-----------------------------------------------------------il.................
fc
50
-
t-
-----------------..........................
.......................
..........................
.................
I
0-
I
0
50000
100000
150000
1rI
200000
250000
Apoapse of Intermediate Ellipse (km)
Figure 27 Transfer Time vs Apoapse for Two Mars Encounters - Up Cycler Orbits
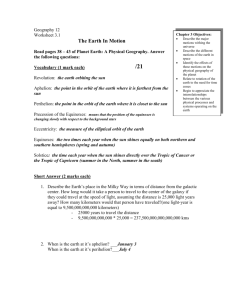
6.3.2
VISIT Orbit
Figure 28 shows the Mars encounters of the VISIT orbit in relation to a spaceport located in
the orbit of Phobos. Phobos' orbit is inclined slightly with respect to Mars' equator so the
relative declination can vary a great deal to produce a large plane change angle as shown in
the behavior of the second encounter
I
3.5
II
I I
I I
I I I1
I
I
I I II
I
I
I
pl AV hyp
..........
.............
---------·---------............
........
-- p2 AV hyp
3.3
--.-- p3 AV hyp
----------
..
.-.....
pp4 AV hyp
.............
C........
3.2
...
.....
......
3:1
%.
-- o--p5 Av hyp
'---------------·-----------------------
3
2.9 -1................
.....................
-
-
-
.
2.7
I
-
3.4
2.8
I I
.........
..............
I I I50000
I'
I
100000
4...............
III0I
00 II1I
2000000
15060
I
I
___
250000
Apoapse of Intermediate Ellipse (km)
Figure 28 AV vs Apoapse for All Phobos Encounters - VISIT Orbit
Figure 29 depicts the comparison of the three circulating orbits for the second and third
Mars encounters. Again the encounters by the CASTLE in the VISIT orbit have lower AV
values due to the lower V-infinity magnitudes.
Figure 30, like Figure 29, shows all the circulating orbits. However, in this figure two of
the three rendezvous options for Phobos are shown rather than the different encounters.
The "hyp" represents a hyperbola rendezvous with the Taxi's hyperbola having a periapse
equal to the radius of Phobos' orbit (= 9400 km). The "low" represents a different
hyperbola rendezvous with the periapse of the hyperbola equal to a much lower 3600 km.
The figure shows quite clearly that a low hyperbola rendezvous offers a lower total AV
because of the lower AV needed at the third impulse.
I
I
I
I
I
i
i
i
I
I I I
I
I
I
I
I
I
I
I
I
I
---- Up 2
-
*-
......... -w
---- Down 2
VISIT 2
..............
p........
..........
--
Up 3
---
Down 3
-- e-- VISIT 3
p.p.....
i------------------------------..........................
v:
I
I
I
F
I
III
50000
v
I
I
F
I
I
I
I
I
I
100000
I
I
150000
I
I
I
200000
250000
Apoapse of Intermediate Ellipse (lan)
Figure 29 AV vs Apoapse for Two Phobos Encounters - All Circulation Orbits
LLLLI
I
1U
LL
V
VI
I
LL L
IL
I
II
-
9na
----
Up hyp
--
Up low
...........................
.......................---------------------..
: ............
.............
..........
--Down hyp
............------- -----
Down low
.
VISIT hyp
----
VISIT low
--
----- E
6"
5-
....................
........................
. ...........
. . . .. . . .. . . .. . .. ... ... . .. . . .. . . .. . . . .. . . .. . ......
. .. . .p..... . . .. . . .. . . .. . . .
2
T
I
0
I
I
I
I
I
50000
I
I
I I I
100000
I
I
I
I
150000
I
I I I
200000
I
I
I
250000
Apoapse of Intermediate Ellipse (man)
Figure 30 AV vs Apoapse for Two Rendezvous Options - All Circulation Orbits
6.4 SPACEPORT AT L1
The spaceport at L1 presents the most complex Taxi trajectories in this analysis. A
literature search did not produce any papers that examined ways to launch from L1 to a
specified V-infinity vector. However, trajectories to and from L1 to LEO and to the Moon
are well documented (Eagle Engineering (a,b), 1988). The combination of elliptical orbits
provides many solutions but common sense dictates that some trajectories have to be better
than others.
A spaceport at L1 does not have the same velocity or period as an object in a circular orbit
around the Earth at the same altitude. A spaceport at L1 would be travelling with the period
of the Moon (=27.5 days) and at velocity of approximately 1.02 km/sec. The spaceport
would be travelling slower at L1 than if it was in a circular orbit at the same altitude relative
to the Earth. If the Moon suddenly disappeared or if the spaceport was jolted out of its
semi-stable position, the spaceport would enter an elliptic orbit with L1 at the apoapse.
Conversely a spaceport located at L2 would be travelling with a velocity that is faster than if
it was in a circular altitude. Then the spaceport would be in an elliptical orbit with the
periapse located at the distance of L2 if the Moon disappeared.
Since the three-impulse method is not well suited for the spaceport located at a Lagrangian
point, the behavior just mentioned might be exploited to aid in the Taxi trajectories from
Lagrangian points. The Taxi would just have to nudge itself from the spaceport and would
automatically enter an elliptical orbit because it does not have the stability the spaceport
provided in order to stay at L1. Another condition to be exploited is the distance of L1
from the Earth. The distance, which is on the order of 300,000 km, allows an inexpensive
plane change. The AV for a plane change is
AV = 2 Ve sin
where Vc is the circular velocity of L1 and 8. is the plane change angle.
The maximum the AV could be is 2.04 km/sec with a 8 = 1800. In any type of trajectory
the first impulse will be a plane change along with AV to alter the periapse of the elliptical
orbit the Taxi entered when it left the spaceport.
A different approach is required for the L1 to CASTLE trajectories because the threeimpulse program is not suited to the initial conditions. The large distance of L1 from the
Earth does not make L1 a low planetary parking orbit. A separate program was written to
look at the various paths the Taxi could follow from L1 to the CASTLE hyperbola. The
first trajectory is a simple point-to-point path from L1 to the periapse of the CASTLE
hyperbola. See Figure 31.
Figure 31 Two-Impulse Transfer from L1 to the CASTLE
To calculate the trajectory, a routine was written from the Improved Method of Gauss
(Battin, 1987). Gauss' method takes two distances, a transfer angle, and a transfer time to
produce a connecting trajectory. The transfer angle was varied from 0' - 3600 and the time
from 20 -200 hours. The orbits produced from this routine included some hyperbolas and
high elliptic orbits which would be of questionable use for Taxi transfers. The routine was
then modified to identify the possible two impulse transfers for each Earth Encounter. The
relative position of L1 to the axis of the CASTLE hyperbola was calculated for the date of
closest approach. Then a time increment was selected and L1 was moved backward from
the time before closest approach. At each new position, the transfer angle was calculated
along with another trajectory. The total time was limited to the period of the ellipse with a
semi-major axis of the sum of the closest approach radius and the radius of L1. That
number was longest time the Taxi had to make its rendezvous. For each Earth encounter
20 trajectories were calculated.
Figure 32 depicts the AV needed for a Taxi trajectory from L1 using the Improved Method
of Gauss. The transfer angles were adjusted to make the graph readable (where appropriate
negative angles and angles greater than 3600 were used to eliminate discontinuities). For
some of the encounters a minimum AV does exist, but in most cases the resulting trajectory
is a rectilinear ellipse. After examining the data using Gauss' method, a low AV trajectory
is a rare find.
II III III I I I II
-El
AV
----- E2 AV
...............
--.-E3 AV
--++-E4 AV
-- E--E5 AV
----- E6 AV
-------------------
....
... . . . .
............... i
..................................
-- ....
..............
.............. L............. ..............
.......
*"
...
.r...
.....
.....
..
...
11II[Ill
-50
0
50
100
150
Iijli
200
250
11I
300
iii
350
400
Transfer Angle (deg)
Figure 32 AV vs Transfer Angle for the L1 Encounters - Up Cycler Orbit
The second path type uses two ellipses to travel from L1 to the periapse of the CASTLE
hyperbola. One ellipse is assumed to have a periapse that coincides with the periapse of the
hyperbola. Figure 33 shows this trajectory type.
The second ellipse connects L1 and the first ellipse. The angular position of L1 at the Taxi
launch to the axis of the hyperbola at Taxi arrival is the main variable. The relative
positioning determines the difference in flight path angles between the two ellipses (Abeta).
The Abeta in turn affects the second AV given by
AV =VV1 +V,,
2 -2VeVe2 cos Abeta
where Ve1 and Ve2 are the velocities on the 1st and 2nd ellipses respectively
CASTLE HvDerbolic Path
Orbit of L1
L1
2nd Ellipse
Figure 33 Two-Ellipse Transfer Between L1 and the CASTLE
The apoapse of the first ellipse also affects the total AV be changing the velocity at the
periapse of the 2nd ellipse. To calculate the trajectory a patched-conic routine was used
which varied the relative position angle between L1 and the axis of the hyperbola from 00 to
3600. Therefore, the total AV was made up of the plane change, ellipse to ellipse AV, and
ellipse to hyperbola AV.
I
ASTLE Hyperbolic Path
Relative Position Angle
lipse
2nd Ellipse
Figure 34 Second Option on Two-Ellipse Transfer
An addition was made to the routine to see if any savings could be made when the
hyperbola was between the Earth and L1. Instead of the periapse of the ellipse coinciding
with the periapse of the hyperbola, the apoapse would. See Figure 34.
This option was used only when the relative position angle is between 900 and 2700. When
the position is outside that limit the hyperbola is not between the Earth and L1.
Additionally, this option is not used when the periapse of the hyperbola is greater than the
distance to L1.
osition Angle
I
:Path
L
1st Ellipse
2nd
Clear View of Intersections
Figure 35 Difference Between Two and Three-Ellipse Transfer
The third path examined tried to exploit any savings found in making a three ellipse
trajectory. The rationale behind trying this three ellipse approach is the hope that breaking
up the large position angle into two smaller angles will reduce Abeta, the change in flight
path angles between the ellipses. The smaller Abetas would in turn produce a smaller total
AV than the original AV with only two ellipses. Figure 35 illustrates the two and three
ellipse trajectory.
The three options were all integrated into one program. The program made no attempt to
optimize the AV. The only optimization that could be made is have the relative position
angle equal 1800. However, the position is fixed within the encounter. L1 has a position
when the CASTLE arrives and a position when the Taxi leaves. The encounters of Earth by
the different circulating orbits do not produce a relative angle of 1800 every time. The
departure position is the only thing that can be varied to achieve the proper position angle.
Again a trade off must be made between transfer time on the Taxi and the AV needed to
make the transfer.
14
I
I
. .
. .
.
_
12
10
6
4
--
Gauss' method AV
...........................
---E-- Two-ellipse AV
--- +- Three-ellipse AV
0
20
40
60
80
100
.... . .. ....
120
I
140
Transfer angle (deg)
Figure 36 AVvs Transfer Angle Comparing Three Methods for 6th L1 Encounter - Up
Cycler Orbit
The program was run first as a general case for all relative position angle. Then it was
modified to look at each Earth encounter. Figure 36 uses the results of the program in a
comparison of three of the methods used to calculate the AV for the Taxi trajectory between
L1 and the CASTLE. At some angles the two-ellipse method produces a AV which is
lower than Gauss' method, and even the three-ellipse method produces some AVs that are
lower than the first method. The conclusion to be drawn here is that a number of methods
have to be analyzed to find the minimum AV trajectory from L1.
6.5
COMPARISON TO PSEUDO-HOHMANN
This section will compare some of the results from the three-impulse program to PseudoHohmann trajectories for the various cases already discussed.
The situation here is a transfer from an elliptical or circular parking orbit to a hyperbolic
orbit. In reality, the transfer is not, in the strictest sense, a pure elliptical Hohmann transfer
from one circular orbit to another. However, that does not take away the usefulness from
the comparison of a pseudo-Hohmann orbit to another non-Hohmann transfer. In the
analysis the transfer angle is assumed to be 1800, and the impulses are at the periapse of the
parking orbit / periapse of the transfer ellipse and at the periapse of the hyperbola / apoapse
of the ellipse. Figure 37 depicts the geometry. In some cases in which the hyperbola flies
below the parking orbit the apoapse and the periapse of the transfer ellipse will switch
pairings (see Figure 38).
Hyperbolic Orbit
Transfer ellipse
Parking Orbit
Planet
Figure 37 Pseudo-Hohmann Transfer
Hyp
Hype
Transfer ellipse
Figure 38 Transfer With Hyperbola Below Parking Orbit
The speed at the periapse of the parking orbit is
Vppo =
1o
apo
)
The speed at the periapse of the hyperbola is
Vph
rh
V
The semi-major axis of the transfer ellipse is the sum of the two periapses.
ae = rppo + rph and rpe = rppo rae = rph
The velocities at the periapse and apoapse of the transfer ellipse respectively are
Vp= -Tpj--pe
V,=J
a and
ndaae
=-aeý
The total AV is the sum of the differences of the velocities at each impulse.
Total AV = (Vppo - Vpe) + (Vph - Vae)
The equations above came from astrodynamic textbooks (Bate, et. al, 1971 and Roy,
1988).
Examining the scatter graphs in Figures 39 and 40 reveal that the Pseudo-Hohmann
trajectories can not compete with the three-impulse trajectories. The advantage of reducing
the plane change AV in the three-impulse trajectory can readily be seen in the following
figures. This section may be considered to be trivial but it is the verification of the choice
of the three-impulse trajectory in this situation.
I I I I SI I I
7.5
I I I I I
-·1
7
*
eup
a
e down
x e visit
~---------------·------------------
6.5
.................
.................
---.....
.................
:.......................
...... .................I ................
....
L.................
L.......
.................
* e up 3-imp
o
···....
··-.....-....
..-...........
·............
6
5.5-· ....................
Se visit 3-imp
...........................
5-2................ •,...............
23
e down 3-imp
i............... •,...............
i
_.
............... . ................
i
!
P
a3 ............... ".................".................... ................ .................
.
. . . . . . . . + .. ....................
._-------------.. ....
. . . . .. . .. ......
-- .
+
1
0
1
2
3
4
5
6
7
Encounter Number
Figure 39 Pseudo-Hohmann Comparison to 3-Impulse for Earth Encounters
14
111111111111
-
111(1111111111
1111(111
11111
I
1
C
4
12
-
..............................
10
8
...............
............... .............................................
--.....
[p
*
0·-
r
..............
E.
i .......
...........
........
.
S
o
i
i
.
i
m up
o
m down
,x
6
m visit
0
4
...........
......
.
m up 3-imp
0--------------m down
3-imp
m visit 3-imp
2
0
1
2
3
4
5
6
7
8
Encounter Number
Figure 40 Pseudo-Hohmann Comparison to 3-Impulse for Mars Encounters
7. LAUNCH DELAYS AND TIME PHASING
In the Introduction a number of problems with the Taxi trajectories were mentioned as
points for the analysis to address. The problem of plane changes has been successfully
solved by the use of the three-impulse trajectory. Launch delays and time phasing are the
other two serious problems that have to be addressed in order to achieve the initial goals of
this thesis. Launch delays can be considered the penalty AV incurred when the Taxi leaves
at a position other than the optimal position and the associated problems of catching the
CASTLE on an outbound trip when the launch is delayed. The time phasing problem
occurs because of the orbit of the spaceport which restricts the position the Taxi can launch
from. The timing of the launch of the Taxi is critical for rendezvous because a late Taxi
may not be able to rendezvous with the CASTLE. Launch windows have to be defined for
each encounter to locate when the Taxi can leave or arrive at the spaceport.
7.1
LAUNCH DELAYS
Launch delays are both easy to define and visualize in this situation. However, different
options exist to correct for the delays. Given the situation where the Taxi is going from a
spaceport in low Earth orbit to the CASTLE. The Taxi has the option of rendezvousing
with the CASTLE at the periapse of the hyperbolic fly-by or rendezvousing by getting on a
hyperbola that will intercept the CASTLEs hyperbola at a specified point. If the
rendezvous is with the periapse, then the transfer has to be very precise because one error
will result in the Taxi missing the CASTLE as it passes its periapse at about 10 km/sec. If
the rendezvous is carried out by using an intercepting hyperbola, mistakes can be corrected
more easily.
The mistakes that are alluded to are the launch delays which include errors made at any of
the impulses. In real operations the burn could be started or stopped early or late which
made the position of the burn incorrect. Options for correcting for these mistakes are
critical in order for the Taxi to rendezvous with the CASTLE. Mistakes such as complete
mechanical failures which can be fixed in a set time can be accommodated for by allowing
the spaceport to orbit once or more times around to allow the Taxi to launch later but at an
optimum position. The opportunities to launch on every spaceport orbit will be addressed
in Section 7.3.
The timing of the rendezvous is critical because the CASTLE encounters the Earth or Mars
only once every couple of years. Options are needed to correct for launch delays in order
to complete the rendezvous. The options available to correct the delays will depend on the
delays themselves. In this analysis of launch delays the burns will be considered to cause
velocity impulses so the error can be either a burn that has not occurred in the proper
position or one that has not occurred at the proper time. The time when the error was
recognized will also contribute to the options. If the first or second burn is misplaced and
the error is not discovered until just before the third burn is to be made, the only correction
that can be made is at the third impulse. If the rendezvous had been set up for a periapse
rendezvous then the only option available is to enter a short phasing orbit in order to get on
a different hyperbola that would intercept the CASTLE many days later. If the rendezvous
was a hyperbola intercept, the correction can be made in two parts. The first being an
adjustment at the third burn to boost the hyperbola to achieve a new V-infinity vector
(Wilson, 1990). The second correction can be made at the fourth impulse that Taxi makes
to turn its hyperbola into the CASTLE hyperbola.
In a simple linearized model of the AV penalties for launch delays found just before the
third impulse, the major contributors are the time delay (at), the magnitude of the V-infinity
vector, and the time it takes to go from point of getting on the hyperbola to the point of
intercept (T). The linearized equation is
ad at V.
AV -=-T
T
T
Using this equation for various encounters, hypothetical time delays, and hyperbolic
transfer time, AV penalties were calculated. For Earth encounters the time delays were
every 20 minutes up to 80 minutes which is slightly less than the period of the LEO
spaceport orbit. For the Mars encounters the delays were every hour up to 4 hours which
is about half of the period of Phobos' orbit. The hyperbolic transfer times or catch up days
were varied from one to ten days. All outside perturbations were ignored in this analysis.
Figure 41 show the results of the launch delays.
The AV shown in the graphs is the additional AV that is needed beyond the normal AV of
the transfer. The AV penalty for leaving late increases as the delay increases. However, as
the time the Taxi has to travel for the rendezvous with the CASTLE, the AV penalty
decreases. The penalty for leaving late from the spaceport near Phobos is greater than at
LEO because the V-infinity magnitude is greater. Therefore, the penalties would vary from
encounter to encounter depending upon the V-infinity vector.
0.35
2-
0.3
1.81.6-
....
------ -
........
-*-2 bmam
0.25
1.4-
I0.2
1.2-
0.15
4
..... ...
. . . . . . .. . . i...--
.
.
...
.....
....
--.....
...........
:
:
:
:
i
:
i
:
I'-"··-~"'-··('-'····)···-·-C-·-···
0.6..
1~-:
0.1
s
--......
:
:
:
:
0.4-
0.05
0.2-
0"
0
0
1
2
3
4
5
6
7
Catch Up Days
Delay at Earth
8
9
10
I.'.I
0
2
' I.'.
3
4
.
5
'
6
.'.I.'.I
.I...
7
8
9
10
cch Up Days
Delay at Mars
Figure 41 AV Penalty for Launch Delays for the 1st Encounters of Earth and Mars
If the first impulse is in error and the error is caught before the second impulse, then two
options exist. The correction can be made, as discussed before, at the third and fourth
impulses if a hyperbola rendezvous is used. Alternately, the correction can be made at the
second impulse by changing the length of the apoapse of the intermediate ellipse to achieve
the proper transfer time.
The options to correct for a mistake at the third impulse are very limited. For a periapse
rendezvous nothing can be done if the Taxi does not get onto the CASTLEs hyperbola at
the instant when the CASTLE passes through periapse. If the error at third burn during a
hyperbolic rendezvous does not prevent an interception of the two hyperbolas, the fourth
burn can accommodate the extra AV needed. However, if the intercept occurs after the
passage of the CASTLE by the intercept point, then nothing can be done to rendezvous
with the CASTLE.
The possibility of launch delays has to be considered when choosing the trajectory for both
the manned and unmanned Taxi. In Section 6.1.2, the lengthy transfer time for a
hyperbolic rendezvous made the shorter periapse rendezvous option look better for the
manned Taxi. However, the likelihood of rendezvousing with the CASTLE at its periapse
in the event of a launch delay at the second or third impulse is slim compared with the
hyperbolic rendezvous. Depending upon the reliability of the Taxi propulsion system, the
manned Taxi may have to endure long transfer times to ensure rendezvousing with the
CASTLE.
7.2 BEHAVIOR OF FIRST IMPULSE CONSTRAINED TRAJECTORIES
The most critical optimized variable in the three-impulse program is 01 (Gerbracht, 1968).
01, as mentioned before, is the angle between the projection of the V-infinity vector onto
the parking orbit plane and the location of the first impulse. Since it is unreasonable to
assume that the Taxi will be able to leave at exactly the optimal 01 value, the behavior of
the other variables should be examined for a fixed value for 01.
The three-impulse program was altered by simply ignoring one of the subroutine calls that
optimizes the value for 01. Then 01 was used as an input that could be varied along with
all the other inputs. For encounters both at the Earth and Mars, 01 was varied from 0o
through 3600 by 100 increments.
7.2.1
Earth Encounters
Figure 42 depicts total AV vs the position of 01 for all the encounters of Earth for the
Down Cycler orbit. The apoapse radius of the intermediate ellipse was fixed at 50,000 km
for all the encounters. Generally as 01 increases around the optimal value, the AV
increases. The shape of the curve is sinusoidal with the amplitude proportional to the
relative declination of the encounter.
0
60
120
180
240
300
360
Fixed Position of Theta 1(deg)
Figure 42 AV vs Position of 01 for All Earth Encounters - Down Cycler Orbit
The next graph seen in Figure 43 shows the same AV vs 01 for different values of the
apoapse of the intermediate ellipse. The second Earth encounter by the Up Cycler orbit
was used for this graph. The scale of the graph is too large to show the variation of the
optimal 01 value for the various values of the apoapse. The straight portions of the curve
near the optimum is caused by the large 100 increments of 01 used to produce the graph.
l iii
9
-
8.5
-
-
I
--
-- I---------------------------
--- -
-
t
-
8
7.5 7-
--c-50,000 Ian
6.5-
---- 60,000 km ....
6-
--.-
70,000 km
5.5
5
4.5
0
60
120
180
240
300
360
Fixed Position of Theta, (deg)
Figure 43 AV vs Position of 01 for the 2nd Earth Encounter - Up Cycler Orbit
The first figure on the next page (Figure 44) shows AV vs 01 for the first two Earth
encounters of the Up Cycler orbit for an apoapse value of 50,000 km. The additional
comparison here is between the hyperbola rendezvous and the periapse rendezvous. Only a
small difference in AV separate the periapse and hyperbola rendezvous options at the
optimal 01 position.
7.2.2
Mars Encounters
Figure 45 is a graph of AV vs 01 for the Mars encounters by the CASTLE on the Up
Cycler orbit. The shape is similar to the graphs of the Earth encounters, but the amplitude
is smaller because of the smaller variations in the relative declination at Mars. Data is also
missing from two of the encounters for higher values of 01 because the three-impulse
program fails to converge. As mentioned before, the three-impulse program is not
guaranteed to converge for every situation that is input. Again the values of AV increase
around the optimal 01 but not as severely as in the graphs for the Earth encounters.
0
60
120
180
240
300
360
Fixed Position of Theta 1 (deg)
Figure 44 AV vs 01 for Two Rendezvous Options at Earth - Up Cycler Orbit
0
60
120
180
240
300
360
Fixed Poistion of Theta (deg)
Figure 45 AV vs Position of 01 for All Mars Encounters - Up Cycler Orbit
7.3 PRACTICAL FIXED FIRST IMPULSE TRAJECTORIES
Time phasing is knowing when and where to leave the parking orbit so that the Taxi can
rendezvous with the CASTLE most economically. Transfer time has been mentioned but
only as a trip length for the Taxi and not as a precise launch time. In order for the position
in the orbit and the launch time to be calculated, the parking orbits must be defined in space
as well as in time. The spaceport orbit which would have been ideal were L1 and Phobos.
Since L1 was not a good location to use with the three-impulse program, a low Earth orbit
was arbitrarily defined to use in this section. Phobos remained a good choice because it
could be used with the three-impulse program, and the planetary ephemerides could
provide its location at any time.
To perform this analysis the three-impulse program was again modified from its original
form to search for the possibility of leaving at the optimal 01 on every orbit of the parking
orbit prior to the approach of the CASTLE. The program would initially calculate the
positions of the spaceport for a given range of values for 01. A corresponding time before
the arrival of the CASTLE at its periapse is also calculated. Those values are compared to
the values calculated by the program for a certain value for the apoapse of the intermediate
ellipse. If the transfer time differs somewhat from the time when the spaceport is in
position, the apoapse is increased or decreased appropriately; and the program recalculates
values for AV, transfer time, and 01. The increase or decrease in the apoapse may produce
a change in 01, so careful attention must be paid to the initial range of 01. The iteration
process is continued until the difference between the transfer time and the time at which the
spaceport is in the correct position is less than .005 hours. The result of the iteration
process will be optimal position (01), apoapse of intermediate ellipse, time (hours before
periapse passage of the CASTLE), and AV.
7.3.1 Low Earth Orbit
The low Earth orbit defined was a 370 km circular orbit inclined at 28.50 with the ascending
node and the argument of periapse defined to be at 00 with respect to the equinox when the
CASTLE is at its periapse. The opportunities for the Taxi to launch are found by selecting
the number of revolutions of the parking orbit that precede the the CASTLE passing
through its periapse. The number of revolutions correspond to a position of the spaceport
in its orbit and to a time before the CASTLE passes through its periapse. If the time of
periapse passage is considered to be zero, then all the time before the passage should be
negative. However, for convenience sake, all time before passage will be the absolute
value of the time.
An initial guess is made for the number of revolutions of the LEO so that the corresponding
position of the spaceport will be the optimal 01 value. An initial apoapse of the
intermediate ellipse is also input into the program. The program will output a transfer time
needed for the Taxi to complete its transfer. Most of the time, this transfer time and the
time before periapse passage will not match. The two times will be resolved by changing
the length of the apoapse to change the transfer time.
This process can be repeated for every orbit of the spaceport in LEO. Each opportunity to
launch or arrive at the spaceport will be represented by a AV, a time before the CASTLE
passes its periapse (which is equal to the transfer time of the Taxi), and the position of the
spaceport either relative to the planet or to the V-infinity vector. Depending upon the AV
capability and the maximum allowable transfer time of the Taxi, a large window will open
many days (=10) before periapse passage. It is at this time when Taxi transfers can begin
between the CASTLE and the spaceport. A smaller window exists for each orbit of the
spaceport defined by the AV capability of the Taxi. The larger window will close several
hours before periapse passage due to the larger AV needed to make short time transfers.
Figure 46 shows AV vs the true anomaly of the spaceport in the low Earth orbit for the first
Earth encounter of the Up Cycler orbit.
75
i
........................................................
.
I1
I
I.
U-
I"Ui
I
65
I
........ .. ..... .......
60
--
....... ...............
55
...... ...
......... .
50
-
45
4o
.. .. ..
..
0I
0
70000
140000 210000 280000 350000
Apoapse of Intemediate Elipse (kn)
0
70000
I I
I . .....
140000
rrl
I
III
210000 280000
Apoapse of Intemediate Ellipse (km)
ITr
350000
Figure 46 True Anomaly of Spaceport versus the Apoapse for the 1st and 3rd Earth Encounters of
the Up Cycler Orbit
The circular parking orbit was given a slight eccentricity of 0.0001 to define the existence of an
argument of periapse and to provide consistency between the graphs presented in this subsection.
Now, the positions of the spaceport around the Earth and Mars are both defined by the true
anomaly of the respective parking orbits. The increasing curve seen in Figure 46 can be explained
by the cancelling effects of the regression of the node and progression of the argument of periapse.
The node regresses at a rate of -0.2990/hr while the argument of periapse progresses at 0.487 0/hr.
The net result is a decreasing true anomaly for the spaceport as the transfer time and apoapse
decrease.
7.3.2
Phobos
The same procedure that was used for the LEO spaceport is used for the spaceport in the
orbit of Phobos just behind the moon. The position of Phobos was generated by using an
analytical ephemeris found in the JPL software libraries. Again the number of revolutions
of Phobos in its orbit and the apoapse of the intermediate ellipse are input into the program
to get a transfer time, total AV, and 01. The two times are then matched by changing the
length of the apoapse.
The opening for the large window still depends on maximum exposure time (maximum
transfer time) and the small window length depends upon the AV capability of the Taxi.
However, since the period of Phobos' orbit (7.65 hours) is much larger compared with the
1.53 hours of the spaceport in LEO, the number of opportunities that exist for a Taxi
transfer at Mars encounters is smaller.
295
1ill
1IIIIIIII I.Lt
157
294
..
..
....
...----------- ...
156
293
-155
292
154
291
153
290
152
289
"
288
..
..
..
..
..
..
....
................ . ....
.....
151
150
287
149
0
Apope flntmedie
ise ()
00
50000
50000
100000
100000
150000
150000
200000
200000
Apoapse of Intamediate Ellipe (kcm)
Figure 47 True Anomaly of Spaceport versus the Apoapse for the 1st and 5th Mars Encounters of
the Up Cycler Orbit
Figure 47 shows the true anomaly of Phobos in its orbit (with the spaceport just behind the
moon) versus the apoapse of the intermediate ellipse of the Taxi trajectory. These two
graphs exhibit the same behavior as seen in the graphs for the LEO spaceport. In this case
the regression of the node of Phobos' orbit is only 0.4340 /day while the progression of the
argument of periapse is 0.871 0/day. Again the true anomaly of the spaceport in its parking
orbit decreases as the apoapse of the intermediate ellipse decreases. Another way to
describe this behavior is as the time to the CASTLEs closest approach gets shorter the
parking orbit rotates in such a way that the position of the spaceport at the time of launch
changes.
8. PARAMETRIC STUDY
The situations already examined are fairly unique. Several examples do not show the
behavior for the whole realm of possibilities. Varying the inputs of the program over a
range of values helps to give insight into other scenarios.
As was mentioned previously in Section 5, the inputs to the program which define the
initial conditions are the characteristics of the parking orbit and the V-infinity vector. The
parking orbit is defined by its apoapse, periapse, inclination, ascending node, latitude, and
longitude with respect to the planet's equator and equinox. The V-infinity vector is defined
by its speed, radius of periapse, latitude, and longitude with respect to the planet equator
and equinox (i.e. declination and right ascension with respect to the planet equator and
equinox).
8.1
EARTH ENCOUNTERS
To show the effects of the various inputs, only one was varied while the others where held
constant. The inputs were fixed at the following values: V-infinity magnitude = 5.8
km/sec, CASTLE periapse = 16,000 km, right ascension = 2500 ,declination = 150, parking
orbit radius = 6748 km with inclination of 28.50. Each run included the two methods by
which the Taxi can rendezvous with the CASTLE: an intercept at the periapse of the
CASTLE fly-by and an intercept of the CASTLE hyperbola by another hyperbola. Recall
Figures 6 and 7 in Section 4. The high, low, and the range are shown in the tables in
Appendix A. The other tables in Appendix A show the variation of the other parameters.
Graphs of the corresponding tables are also included in the appendix.
Some comments can be made relating the different effects of the inputs. Changing the Vinfinity magnitude had the most dramatic variations and will be discussed first. The
differences between the highs and lows for this case are greatest for AV and 01. The
magnitude was varied from 3 to 11 kmn/sec by 1 km/sec increments. A small V-infinity
produces a small AV and a large 01. On the whole as V-infinity increases, AV and transfer
time increase almost linearly while 01 decreases.
The periapse of the CASTLE was varied from 8000 to 56,000 km by 4000 km increments.
The range did not cover the entire range seen in the actual encounters of the Earth by the
circulating orbits, but the range is large enough to show the general behavior. For the
hyperbola rendezvous case, all the outputs remained constant because the Taxi gets onto a
hyperbola that is independent of the CASTLE hyperbolic fly-by. For the periapse
rendezvous case both AV and transfer time increased while 01 decreased for the increasing
values of the periapse of the CASTLE.
The right ascension was varied from 00 to 3600 by 100 increments. The behavior of the
outputs was not very smooth as compared to the other input variations. The behavior the
AV and transfer time for the variation of the right ascension is shown in the following
graph.
7.5
20
7
18
6.5
16
6
14
5.5
F-e
12
5
10
4.5
0
60
120
180
240
300
360
Right Ascension of V-infinity Vector (deg)
Figure 48 AV and Transfer Time vs Right Ascension of the V-infinity Vector
The highs and lows of the AV and time correspond to the highs and low of the relative
declination. A low AV and long transfer time correspond to a low relative declination.
The key to declination variation is the relative declination between the V-infinity vector and
the parking orbit The declination was varied from -800 to 800 in 100 increments and the
corresponding relative declination varied from 00 to 800 but without a one to one
correspondence. The smaller the relative declination, the smaller the plane change has to be
and consequently smaller AV. The transfer time increases as the relative declination
decreases. Both intercept cases behave the same way for AV and time. The behavior of 01
was odd in that its curve had relative maximums at both the high and low values of the
relative declination.
When the parking orbit radius was increased from 6678 to 9078 km at 200 km increments,
the AV decreases for the hyperbolic intercept case while the AV decreases with a steeper
slope for the periapse intercept. The AV for the hyperbolic intercept will be less than the
periapse intercept unless the periapse of the CASTLE is the same as the radius of the
parking orbit. As the parking orbit increases, 01 decreases for the hyperbolic intercept but
remains constant for the periapse intercept.
8.2
MARS ENCOUNTERS
The same procedure was used for a Mars encounter. The V-infinity characteristics that
were used are as follows: V-infinity magnitude = 10.5 kmn/sec, CASTLE periapse =
10,000 km, right ascension = 2500, declination = 150, and parking orbit radius = 3600 km
with 00 inclination. The apoapse of the intermediate ellipse was held at 50,000 km. Again
each run included the two methods by which the Taxi can rendezvous with the CASTLE:
an intercept at the periapse of the CASTLE fly-by and an intercept of the CASTLE
hyperbola by another hyperbola. The high, low, and range for Mars encounters are shown
in the tables in Appendix A for the variation of the right ascension between 00 and 3600.
The rest of the tables in Appendix A show the variation of the other parameters. Graphs of
the corresponding tables are also included in the appendix.
The behavior of the outputs does not greatly differ from the Earth case. The only thing that
can be seen is the lack of large differences between the maximum and minimum values of
AV, time, and 01 for the right ascension variation. If the inputs were plotted against AV,
transfer time, and 01, many of the graphs would be flat in contrast to the same graphs
plotted for the Earth case. The lack of an inclination on the parking orbit around Mars
causes little variation in the relative declination and thus not much change in AV. Another
difference is in the variation of the parking orbit radius. For the hyperbolic rendezvous
case the AV increases rather than decreases as it does for the parking orbit around the Earth.
Common sense could have produced most of the answers without the data. If a entirely
new set of planetary encounters were given to be analyzed a number of generalized
statements could be made. Over the set of encounters, the encounter that will have the
lowest AV and the shortest transfer time will be the one with the smallest relative
declination, smallest V-infinity, lowest parking orbit radius, and the lowest CASTLE
periapse. The right ascension of the V-infinity vector must also be compared with the
parking orbit to find the relative declination.
An attempt was made to qualify the results of the parametric study by looking at the partials
created in each parameter variation. The partials may give some clue to the sensitivity of
the outputs of AV, transfer time, and optimal 01 to certain variations in the parking orbit
and V-infinity vector. The following tables give the partials in a matrix-like format.
Table 4 Parameter Partials for Earth Hyperbolic Intercept
Optimal 01
Transfer Time
AV
V-infinity Magnitude
.16897
.16118
-6.3053
Right Ascension of
-.02406
-.0342
.02591
V-infinity
Declination of V.027
-.04734
.1432
infinity
Radius of Parking
1.1085 E-4
-6.0595 E-4
.004108
Orbit
Closest Approach of
1 E-8
1 E-6
1 E-7
CASTLE Hyperbola
Table 5 Parameter Partials for Earth Periapse Intercept
Optimal 01
Transfer Time
AV
V-infinity Magnitude
.38028
.74574
-5.3020
Right Ascension of
-.01596
.01586
.06784
V-infinity
Declination of V.03366
-.0269
-.05377
infinity
Radius of Parking
Orbit
Closest Approach of
CASTLE Hyperbola
2.818 E-4
-1.296 E-4
0
-1.478 E-4
-4.889 E-4
.002524
Table 6 Parameter Partials for Mars Hyperbolic Intercept
Optimal 01
AV
Transfer Time
V-infinity Magnitude
.5728
1.305
-9.310
0
-0
-0
Right Ascension of
V-infinity
Declination of Vinfinity
Radius of Parking
Orbit
Closest Approach of
CASTLE Hyperbola
.00484
-.0935
.3590
1.985 E-4
.00118
-.001485
0
5 E-7
7.5 E-7
Table 7 Parameter Partials for Mars Periapse Intercept
Optimal 01
AV
Transfer Time
V-infinity Magnitude
.7614
.860
-5.800
Right Ascension of
0
0
0
V-infinity
Declination of V.007 6
-.01222
.0663
infinity
Radius of Parking
-2.135 E-4
3.4 E-4
0
Orbit
Closest Approach of
2.4522 E-4
.001071
-6.2825 E-4
CASTLE Hyperbola
The numbers in the matrices back up the comments already made about the behavior of the
parameters. In general, the greater the number, the more sensitive that output is to a change
in the input. However, not much can be done with the partials because not all the partials
behave in a linear fashion. If they had, then a variation in the outputs could have been
calculated from the matrix and the parametric study would have produced a good
mathematical tool for predicting the behavior of the three-impulse transfer. With a little
more mathematical ingenuity a weighting factor might be devised so that these matrices
could produce output variations with an error matrix input.
9.
DISCUSSION FOR FURTHER STUDY
This thesis has analyzed Taxi trajectories between planetary spaceports and the CASTLE on
a circulating trajectory. The suggestions made by Hoffman et al. have been expanded upon
but there is still room for a more detailed analysis in the areas analyzed here and other
related areas. In general, the three-impulse routine can be improved by switching it from a
patched-conic routine with a numerical integration routine. Other extensions of this study
include making a very detailed study of the usefulness of Lagrangian points as a spaceport
location, looking at other locations for spaceports, and an overall mass study needs to be
made to compare the circulating system with a traditional mass transport system.
9.1
LAGRANGIAN POINTS
Two areas need to be investigated in the future in reference to using Lagrangian points as
spaceport locations. The first area is to justify, without a doubt, that having a manned
spaceport at these locations is practical and useful in terms of a Earth-Mars Transportation
System. The next area to investigate are trajectory studies which include transfers from all
Earth-Moon Lagrangian points to a hyperbolic escape V-infinity vector.
The studies made to justify placing a spaceport at the Lagrangian points are not numerous
according to the literature search made of the international aerospace papers. A Soviet
paper was found whose abstract mentioned that spaceports at Earth-Moon Lagrangian
points will be an integral part of any manned exploration of the solar system (Brykov,
1981). Most of the other papers found did not touch on the issue of practicality but rather
on the necessary station keeping problem of keeping a large object at stable and unstable
libration points (Seward, et. al, 1971). One of the papers mentioned in the introduction
said that L1 was chosen as a spaceport location because of the relative low AV needed to
get mass to L1 from Earth's surface and the Lunar surface (Hoffman, 1986). That was the
only reason stated. Future studies in this area will have to incorporate all of the factors, AV
to get there, AV to keep it there, space radiation protection, abort constraints, and other
concerns of constructing a space station.
Trajectories to the Earth-Moon Lagrangian points from the Earth or from the Moon have
already been defined (Eagle Engineering (a, b), 1988). However, the literature search did
not produce any studies of launching spacecraft from a Lagrangian point on an escape
trajectory. Concerns for finding these trajectories include using the Moon and/or the Earth
for gravity assistance, worrying about all the perturbations at the Lagrangian points
especially at L1 where the point is inside the Lunar sphere of influence, and looking at time
phasing.
9.2 OTHER SPACEPORT LOCATIONS
In this study the spaceport for Taxi staging has been located at two locations at each planet.
At Earth the spaceport was located at L1, the Lagrangian point between the Earth and the
Moon, and in a potential Space Station Freedom orbit. At Mars the spaceport was
following just behind Phobos and in a low Mars orbit arbitrarily selected at a 200 km
altitude. In the introduction several other locations were mentioned. This section will
make additional comments on those potential spaceport location that were not studied in
detail.
Suggested locations that were not examined were a low Lunar orbit, an Earth-Sun
Lagrangian point, and Earth-Moon cycler orbit. The first to be examined is an Earth-Sun
Lagrangian point. That point whether it is mathematically stable or not would most likely
be unstable in the real word because of the numerous perturbations felt that far from the
Earth. The Trojan asteroids exist at the Jupiter-Sun Lagrangian points but a spaceport at an
Earth-Sun Lagrangian point may be more trouble than first anticipated. The unstable
colinear Earth-Sun Lagrangian points would experience perturbations from Jupiter and
would be subject to solar radiation pressure. Those factors have to be examined even
though they may turn out to be insignificant over the lifetime of the spaceport
Next is a low Lunar orbit. Such an orbit would present a doubly difficult phasing problem
as compared to the L1 position. Not only must the position of the Moon relative to the
Earth be taken into account but also the position of the spaceport in its orbit around the
Moon. The spaceport will have to be in the right position to encounter the Earth and the
Moon has to be in the right position to allow a transfer to the hyperbolic fly-by. To ease
the timing constraints that may occur, phasing orbits around the Earth may be used to wait
for the proper moment to start the Taxi's rendezvous with the CASTLE.
The last location is a spaceport located in an Earth-Moon Cycler orbit (see Figure 49). The
numbers in the figure show the progression of spaceport in the orbit. A more detailed
discussion of the Earth-Moon Cycler can be found in one of the references (Niehoff,
1986). The Earth-Moon Cycler orbit has both advantages and disadvantages. Its main
disadvantage is the complexity of getting a spaceport in that repeating trajectory. The level
of difficulty would probably be on the same level as putting a CASTLE in a Earth-Mars
circulating orbit. One advantage is found in the AV requirements to transport material
between the spaceport and the Moon or the Earth. That AV is the lowest among all
spaceport locations in the Earth-Moon system (Hoffman, et al., 1986). The opportunities
to launch a Taxi between the CASTLE and the spaceport may be extremely limited because
the geometry of the Earth-Moon Cycler does not allow frequent chances to launch or
receive a Taxi during a CASTLE fly-by.
n+1 Lunar Swingby
nth Lunar
N
Lunar Orbit
Phasing Orbit
Earth-Mo
Cycler Oi
Figure 49 Earth-Moon Cycler Orbit (Niehoff, 1986)
9.3 MASS RATIO STUDY
As was performed for the Cycler and VISIT orbits, a new mass study needs to be
performed to include the new data on the Taxi trajectories. The study performed by
Hoffman, et al. compared interplanetary transportation systems over 15 to 20 years. In that
study over the time period the Cycler and VISIT orbits provide some AV savings as
compared to normal conjunction and opposition class trajectories over the same time
period. The details of the Taxi trajectory study would be included to again verify the
savings or lack of savings between the two transportation systems. This future mass study
would also take on the added responsibility of looking at a transportation system where no
extra-terrestrial propellants are used. Another point that would be addressed in this study is
the comparison of an Earth launched Taxi with a spaceport launched Taxi. A Taxi using a
direct ascent trajectory from the Earth's surface would enter into the plane containing the
CASTLE fly-by and would then later get onto a hyperbola to rendezvous with the
CASTLE. From launch-to-orbit theory, two launch windows usually occur every day that
allow the Taxi to launch into the proper plane. The length of the windows are constrained
by launch azimuth limits for range safety, lighting restrictions at the launch site, and other
constraints (Sergeyevsky, 1983). Once the Taxi has entered the plane containing the Vinfinity vector, it will wait for the proper time to enter a phasing orbit which would enable
the Taxi to properly time the rendezvous with the CASTLE. A comparison would decide
whether a system which transports astronauts from the Earth to a spaceport and transports
them to the CASTLE is more economical than a non-stop ride from the Earth's surface to
the CASTLE.
This study would also be an appropriate place to discuss in detail the options for
aerobraking the Taxi for transfers to the spaceports. The Taxi spacecraft both in its manned
and unmanned versions should be capable of aerobraking in both the Martian and Earth
atmospheres. The aerobraking should almost eliminate the large first impulse going from a
hyperbolic to an elliptical orbit. Drawing from other recent aerobraking studies should
provide enough information to determine whether the heat shield would be ablative or
completely reusable. Over a long period, the aerobraking Taxis may save enough to make
the circulating orbit transportation system to be the more economical one.
10.
SUMMARY AND CONCLUSIONS
This section will give an overview of the tasks analyzed and provide some concluding
remarks on the Taxi trajectories between planetary spaceports and circulating orbits.
10.1
SUMMARY
This thesis began with an introduction to circulation orbits and their potential for routine
travel between the Earth and Mars. Up and Down Cycler orbits along with VISIT orbits
provide repeating trajectories between Earth and Mars for a large spacecraft (CASTLE) to
follow year after year. The trajectories between Earth and Mars are well defined, but the
trajectories for the spacecraft (Taxi) which travels between the circulating trajectories and
the orbiting planetary spaceports have not been well defined.
Previously only cursory examinations of the Taxi trajectories have been made to get ballpark AV figures for a large mass ratio study. The details of plane changes, time phasing,
and launch penalties had not been examined in great detail. This thesis examined the details
of the Taxi trajectories. A three-impulse conic trajectory routine was used to optimize the
Taxi trajectories between the planetary spaceports and the outgoing V-infinity vector of the
circulating interplanetary orbits. Each encounter of Earth and Mars by the circulating orbits
provides a different V-infinity vector for the Taxi to match. Two spaceport orbits were
chosen at each planet; one a low planetary orbit and the other a high planetary orbit. Each
encounter was examined for a total AV value, a total transfer time, and an optimal position
from which to leave the spaceport to achieve the optimum AV.
A parametric study was also performed to analyze the relationship between the output
parameters of AV, time, and position to the orientation of the parking orbit and the Vinfinity vector. The study helps to give some insight into the behavior for a generalized
planetary encounter. Two other tasks were performed to look at the practical side of the
Taxi trajectories. The first examined the penalties encountered if the Taxi could not leave
the spaceport at the optimal position. The second looked at a parking orbit fixed in time to
observe the affects of nodal regression on the number and length of the optimal windows
for the Taxi trajectories.
10.2
CONCLUSIONS
First and foremost, Taxi trajectories are available despite the difficulties of plane changes,
time phasing, and launch delays. The difficulties just make the Taxi trajectories more
complex and more costly. The costs and complexity of the Taxi trajectories are best
illustrated through a typical encounter scenario. The encounter used is the second Earth
fly-by of the CASTLE on the Up Cycler orbit. As the CASTLE approaches within 7 days
of its closest approach of the Earth, a large window opens for a Taxi departing from its
spaceport in LEO. This window can open earlier depending upon factors not explicitly
discussed here such as maximum time limits for crew exposure in an unprotected Taxi or
gravitational perturbations from the Moon or the Sun. The gravitational effects only come
into play when the apoapse of the intermediate ellipse is close to the Moon or is larger than
the Earth's sphere of influence. The departing Taxi has been given a certain AV capability
of 6 km/sec to perform its rendezvous with the CASTLE. The Taxi can leave on any orbit
of the spaceport until the transfer time to rendezvous is so short that more than the allotted
AV is needed. At that point in time the large window closes. However, the taxi can not
leave at just any time within the large window because a small window opens and closes on
each spaceport orbit. For this scenario, the small window stays open a total of 28 minutes,
10 minutes before the optimum time and 18 minutes after. If the Taxi waits for another
orbit to launch, the small window will shorten in length but not by much. The window's
size is also proportional to the amount of extra AV over the minimum value. Sometime
during the period when both windows are open the Taxi will depart the spaceport on its
three-impulse trajectory. If mechanical problems arise, the Taxi can wait for several
spaceport revolutions to try to launch again. If all is well with the trajectory, the Taxi will
transfer onto an intercept hyperbola at the same time the CASTLE passes through its
perigee. The Taxi then continues on for 43 hours until a fourth impulse of 7 m/sec matches
the two hyperbolas of the Taxi and CASTLE. The fourth impulse increases as the periapse
of the CASTLE fly-by increases.
When the CASTLE crosses the Earth's sphere of influence, about 40 hours before closest
approach, another Taxi will depart the CASTLE on its trip to the spaceport. Therefore, two
Taxis will be in flight around the Earth at the same time. The three-impulse trajectory is
performed in reverse order. As the CASTLE passes through its periapse, the arrival Taxi
transfers from its hyperbola to the intermediate ellipse. Depending upon the structure of the
Taxi, it may use aerobraking or propulsive braking to get onto the intermediate ellipse.
More braking at this impulse will result in a shorter transfer time to the spaceport. With a
AV capability of 6 knVsec, the Taxi can arrive at the spaceport in as few a 55 hours after
leaving the CASTLE. If any delays occur at the CASTLE, the Taxi can leave at any time
until the CASTLE crosses its periapse. As the delay increases, the AV requirement for the
trajectory increases.
The case just presented was one of the more expensive Earth encounters. A AV capability
of 6 knm/sec during any other Earth encounter will increase the size of both windows. The
encounters by the VISIT circulating orbit will provide the longest windows (up to 7.5 days
and 43 minutes for the 2nd Earth encounter) with the stated AV capability. However, it the
Taxi has the same capability at Mars, it would only be able to transfer from the VISIT orbit
and one or two of the seven encounters of Mars by the Up / Down Cycler orbits.
The V-infinity magnitudes are so high for the Cycler orbits that in some cases 10 km/sec is
needed to make the rendezvous. An encounter of the third fly-by of Mars by the Up Cycler
will need 9 kmn/sec to provide ample window lengths. At approximately 12 days before the
CASTLE reaches the periapse of its Hyperbolic fly-by, the departure Taxi at the spaceport
behind Phobos can start its preparations to leave. In other words, the large window
opened. The AV capability provides a small window of 2.8 hours every spaceport orbit,
1.3 hours before the optimum time and 1.5 hours after. The large window will close about
10 hours prior to the closest approach of the CASTLE.
The arrival Taxi will leave the CASTLE when the orbit crosses Mars' sphere of influence,
15 hours prior to closest approach. Leaving later will use AV capability leaving shorter
windows for rendezvousing with the spaceport. The Taxi will have to propulsively brake
or aerobrake to slow itself down in the transition from the hyperbolic trajectory to the
ellipse.
The other encounters at Mars are both better and worse in terms of AV requirements. At
the bad end, a AV capability of 9 km/sec will not even allow completion of the transfer. At
the opposite end, 9 km/sec will allow a transfer at just about any time once the large
window opens.
The interplanetary transportation system needed is one that uses little AV and takes little
time, but this system has not been found yet. A trade off between AV and time always
appears. In this analysis more AV will get the Taxi to the CASTLE faster and more time
will allow for delays but at the price of added AV. The trade off comes down to a decision
between human endurance in space and energy costs. The energy cost in terms of AV will
be low if long-term human exposure to the space environment is safe. The system with the
circulating orbits and Taxis is expensive in terms of AV and it does not set any speed
records. The VISIT circulating orbit would be the best choice if low AV of the Taxi is top
priority. However, the time between interplanetary encounters on the VISIT orbit would
be several years. One possibility is to find a circulating orbit with low V-infinity
magnitudes that has short transfer times between Earth and Mars. Just such a possibility
might exist in a Cycler-type orbit that uses a combination of Venus and Earth gravityassists. Such an orbit would probably have lower V-infinity magnitudes at the Earth and
Mars which means lower Taxi AV requirements. The orbit also allows fly-bys of Venus
which might be of some scientific use.
APPENDIX A DATA AND GRAPHS
Earth and Mars Encounter graphs for AV, Transfer Time, and Optimum 01. The graphs in this
appendix include the Earth and Mars encounters by the Up and Down Cycler orbits as well as the
VISIT orbit for spaceports in low planetary orbits.
AV vs Apoapse for All LEO Encounters
Down Cycler Orbit
AV vs Apoapse for All LEO Encounters
S•
.......
............................
-ElB1
AV hype
-- -
AV hyp
--4.--ES AV hyp
4.714.-
-- B4 AV hyp
i...i....i......
--
............... i...............
EAsV hyp
-*--E6
4.7-
AV hyp
4I
4.6-
....... ...........
...... ..
..
0
0
Apoap, c.flntermediateElipse..m)
280000 350000
210000
140000
70000
7
0
140000
2100
Apoapse of Intenediate Ellipse (kin)
Time vs Apoapse for All LEO Encounters
T•n V-l-P
20 0
lr-h;tf
-
1752
E1 tim. hyp
---------------......
-- ------i--- .............
E2 time hyp
E-b
El time hyp
50-
s E- tim hyp
-- E3
ti&m
hyp
25-
.
il..il
tilt---.......
o
1
70000
i
i
140000
... 1
l
210000
1
11
E6 tum hyp
1
280000
1
350000
ApoapseofIntermediateEllipse(km)
Apoapse
Optimum
Theta
of
Intermediate
vs
Apoapse
Ellipse
for
(km)
All
LEO
Encounters
O
pI
timum
Theta
vs
Apoapse
for
All
LE
thet hyp
thet hyp
ihet hyp
that hyp
ithethyp
Apoapse of Intermediate Ellipse (km)
Apoapse of Intermediate Ellipse (mn)
s
AV vs Apoapse for All LMO Encounters
Up.Cycler Mrbit
AV vs Apoapse for All LEO Encounters
VISIT Orbit
Iw
SMI
AVhyper
M2 AV hyp
0
............
7--
-----
. .
·- -
.............
--- M3 AV hyp
.....................
4
AV hyp
0 GMS
--
6-
.............
..........
5--=
· l
.
.
M6 AV hyp
S.............. ..... -- M7 Vhyp
...............
F
!I-
1 1. 1I I. .1 .1 ..
.
50000
AV hyp
-
III
1111111
11111
100000 150000 200000 250000
Apoapse of Intermediare Ellipse (km)
Time vs Apoapse for All LMO Encounters
Up Cycler Orbit
300
250
200
150
100
50
0
0
70000 140000 210000 280000 350000
Apoapse of Intermediate Ellipse (can)
Optimum Theta vs Apoapse for All LEO Encounters
Apoapse of Intermediate Ellipse (kin)
Optimum Theta I vs Apoapse for All LMO Encounters
120-
I
II
, , UpI
•• rIi
, rit,, , . . I
115-
-
110105-
-
70000
140000
210000
280000
350000
Apoapse of Intemediate Ellipse (kmn)
M3 tthyp
M4 tetbhyp
MteS t hyp
-
-
M6 lt hyp
M7 tlbthyp
g
95
0
---
....
..........
.......
.......
---------........
~ . --------·-C-.-
100-
go
MI tethyp
-
00
o100000
150;o00
200';•0
250)00
Apoapse of Intermediate Ellipse (km)
AV vs Apoapse for All LMO Encounters
Down Cycler Orbit
AV vs Apoapse for All LMO Encounters
Orhit
YT ITojajuuufu
S,, , , ,VISIT
11111
3.4.
Ml AV hyper
M2
M3
M4
MS
M6
M7
AV hyp
AV hyp
AV hyp
AV hyp
AV hyp
AV hyp
-M1
-------------
.4.
--.-
AV hyper
--- M2 AVhyp
S---M3 AV hyp
-nx- M4AVhyp
-- ar-M5AVhyp
_.,M
Vh
.-_..............
..............
.........................
-
......--.....
-i------------I
---- (------·-----------4
'''
00nnn0n
r
-
fn 200000 250 00
50nnnnn
Apoapse of Intermediate Ellipse (kin)
Apoapse of Intermediate Ellipse (kin)
me hyp
me hyp
me hyp
me hyp
me hyp
0
100000 150000 200000
50000
Apopse of Intemediate Ellipse (kan)
250000
0
50000 100000 150000 200000 250000
Apoapse of Intermediate Ellipse (kin)
Optimum Theta1 vs Apoapse for All LMO Encounters
Optimum Theta1 vs Apoapse for All LMO Encounters
Down Cycler Orbit
125
110
.
105
--
MI diathyp
M2 tht hyp
M3 hethyp
--- MS thst hyp
85
10000
50000 90000 130000 170000 210000 250000
Apoapse oflntemnediate Ellipse (n)
0
50000 100000
150000 200000 250000
Apoapse of Intermediate Ellipse (kn)
AV vs Apoapse for All Phobos Encounters
Down Cycler Orbit
AV vs Apoapse for All Phobos Encounters
Up Cycler Orbit
11
11
10
10
-
g
S-----......
........
I
*
I
..............
Ip
.
,
-
•.
-
hyp
......--
--
.......
--.---
4-.........
"--"
SAV
hyp
-------i
i...---p
... 2 AVhyp
avbop
p3AVhyp
--
S-.--p4AVhyp
%7
SA byp
..
...
..
...
..
...
....
. .. . .. . .. .. . .. . .. . .. . .. . -rP
7
6
5
-
AVhp
-plkV
-------.......-..
.....
. .
---
-
p7 Avhyp
.
·--------------Cru---------------C1-~·~
I
.
---
-
4
5
50000
100000
150000
200000
II I I
250000
0
Apoapse of Intermdatl Ellipse (km)
,
50000
I . I-. . .
100000
AVhp
b
-c-41 AXV
. . . r.
150000
. . -..- I
200000
250000
Apospse of Innnedim llipse 0in)
Time vs Apoapse for All Phobos Encounters
Up Cycler Orbit
350
l I l
350
300
300
250
260
dmne
byp
dimebyp
9!00
50
a200
dtimbyp
dimebyp
50
time hyp
dimebyp
................
. .
.
. . ..
.
.
-
-
..
..
.....
-pttihehyp
.... p2te hyp
-
--
--
-----
-
-p3
.150
100
Time vs Apoapse for All Phobos Encounters
Down Cycler Orbit
I
-
timebyp
p4the hyp
,i
-i-- i------------------:ii
-.
--- p ithshyp
100
-- -p
50
ise hLyp
-pltsehyp
0
0
50000
100000
150000
200000
Apoape ofIntmediam Ellipe (kin)
50000
250000
100000
160000
200000
Apopse of Inrmediau Ellipse (km)
260000
Optimum Theta1 vs Apoapse for All Phobos Encounters
Optimum Theta1 vs Apoapse for All Phobs Encounters
Up Cycler Orbit
Down Cycler Orbit
96
94
dsbyp
92
abhyp
'90
"00
t-hyp
so
hebyp
i-byp
86
I-byp
bet
by
84
50000100000
150000
200000
Appose of Jnmedise Eipse (hnm)
250000
S
oo000o 100000
150000
200000
Apoape of lham•dirae
ElHipse
qm)
250000
AV vs Apoapse for All Phobos Encounters
VISITOrbit
,,
I
4.0 -
1(I
II
LI
II
II
I" "
"
I
hyp
---- pl AV
3.4
.......
3.3
.............
--- p3 AV
hyp
L
4
3.2
------------,:
-p
AVhy
..........
.............
...............
--p4 AV
hyp
-- o-p5
Av hyp
3.1
-------------
3
L
2.9
2.8
-
2.7
-- ---
..
I I I1 .
0 I. 1 . 1I 1 . 1 1 I' ' I I
50000 100000 150000 200000 250000
0
Apoapse ofIntermediate Ellipse (kan)
Apoapse of Intermediate Ellipse (kmn)
Optimum Theta1 vs Apoapse for All Phobos Encounters
VITqT Orhit
li;•'l
.l''
I I I I Ii
1 '''
I
10098-
-
-pithchy
---
gso
96-
-pl
that hyp
-~p4
tht hyp
-
----
9492-
- p 2thct hyp
.............-....................
- o-- p5 that hyp -------
vu
.
0
..
IIIII''''I''''I''''
..
50000
..
..
100000
.........
I''
| i
150000 200000 250000
Apoapse of Intrmediate Ellipse (kan)
The data produced in the parameter study is shown in the tables that follow. Each table
contains the high and low values and the range of the three outputs.
The right ascension was varied from 0o to 3600. The high, low, and range of the AV,
transfer time, and optimal 01 are shown in the two tables that follow
Table Al Right Ascension Variation for Hyperbolic Intercept
AV (klan/sec)
Transfer time (hrs)
01 (deg)
high
5.817
13.205
129.093
low
4.635
10.893
126.739
A
1.182
2.312
2.354
Table A2 Right Ascension Variation for Periapse Intercept
AV (km/sec)
Transfer time (hrs)
01 (deg)
high
7.059
16.626
120.533
low
5.606
15.422
108.016
A
1.453
1.204
12.517
The declination was varied next from -800 to 800 by increments of 100. In turn the relative
declination varied from 2.930 to 80.15". The high, low, and the range are shown in the
tables.
Table A3 Declination Variation for Hyperbolic Intercept
AV (km/sec)
Transfer time (hrs)
01 (deg)
high
6.783
13.308
144.361
low
4.692
9.341
126.724
A
2.091
3.967
17.637
Table A4 Declination Variation for Periapse Intercept
AV (klan/sec)
Transfer time (hrs)
01 (deg)
high
8.180
16.869
113.651
low
5.652
14.408
108.035
A
2.528
2.461
5.616
The magnitude of the V-infinity vector was varied from 3 km/sec to 11 km/sec every 1
km/sec. The results are shown in Tables A5 and A6.
Table A5 V-infinity Variation for Hyperbolic Intercept
AV (km/sec)
Transfer time (hrs)
01 (deg)
high
8.763
12.609
145.999
low
5.003
10.097
108.728
A
3.760
2.512
37.271
Table A6 V-infinity Variation for Periapse Intercept
AV (kni/sec)
Transfer time (hrs)
01 (deg)
high
10.878
16.656
121.100
low
5.644
13.544
97.704
A
5.234
3.112
23.396
Finally the radius of the parking orbit was varied from 6678 km to 9078 km every 200 km.
The results are shown in Tables A7 and A8.
Table A7 Parking Orbit Radius Variation for Hyperbolic Intercept
AV (km/sec)
Transfer time (hrs)
01 (deg)
high
5.767
12.350
128.914
low
5.587
10.851
120.627
A
.18
1.499
8.287
Table A8 Parking Orbit Radius Variation for Periapse Intercept
AV (knm/sec)
Transfer time (hrs)
01 (deg)
high
7.007
15.685
108.155
low
6.446
15.355
108.155
A
.561
.330
0
Finally the closest approach of the CASTLE was varied from 8000 km to 56,000 km by
increments of 4000 km. The results are shown in Tables A9 and A10
Table A9 CASTLE Closest Approach Radius Variation for Hyperbolic Intercept
AV (knm/sec)
Transfer time (hrs)
01 (deg)
high
5.759
10.894
128.618
low
5.759
10.872
128.553
A
0
.022
.065
Table A10 CASTLE Closest Approach Radius Variation for Periapse Intercept
AV (kn/sec)
Transfer time (hrs)
01 (deg)
high
9.069
31.552
124.309
low
5.972
11.514
67.669
A
3.097
20.038
56.640
The parameter data for Mars Encounters are found in the following tables. The first two
tables are the result of varying the right ascension of the V-infinity vector through 3600.
Table All Right Ascension Variation for Hyperbolic Intercept
AV (km/sec)
Transfer time (hrs)
01 (deg)
high
8.209
39.041
106.588
low
8.209
36.872
95.162
A
0
2.169
11.426
Table A12 Right Ascension Variation for Periapse Intercept
AV (km/sec)
Transfer time (hrs)
01 (deg)
high
9.904
47.266
108.299
low
9.636
42.579
91.895
A
.268
4.687
16.404
The declination was varied next from -800 to 800 by increments of 100. In turn the relative
declination varied from 00 to 800. The high, low, and the range are shown in the tables.
Table A13 Declination Variation for Hyperbolic Intercept
AV (knm/sec)
Transfer time (hrs)
01 (deg)
high
8.562
37.727
105.057
low
8.126
35.661
95.191
A
.436
2.066
9.866
Table A14 Declination Variation for Periapse Intercept
AV (km/sec)
Transfer time (hrs)
01 (deg)
high
10.190
44.500
93.642
low
9.509
43.942
91.906
A
.681
.538
1.736
The magnitude of the V-infinity vector was varied from 3 km/sec to 11 km/sec every 1
km/sec. The results are shown in Tables A15 and A16.
Table A15 V-infinity Variation for Hyperbolic Intercept
AV (km/sec)
Transfer time (hrs)
01 (deg)
high
9.584
37.551
123.943
low
2.380
34.499
94.048
A
7.204
3.052
29.895
Table A16 V-infmity Variation for Periapse Intercept
AV (kn/sec)
Transfer time (hrs)
01 (deg)
high
11.087
44.438
106.614
low
2.935
42.431
91.539
A
8.152
2.007
15.075
The radius of the parking orbit was varied from 3600 km to 6000 km every 200 km. The
results are shown in Tables A17 and A18.
Table A17 Parking Orbit Radius Variation for Hyperbolic Intercept
AV (kn/sec)
Transfer time (hrs)
01 (deg)
high
8.587
40.923
95.191
low
8.209
37.454
92.976
A
.378
3.469
2.215
Table A18 Parking Orbit Radius Variation for Periapse Intercept
AV (kn/sec)
Transfer time (hrs)
01 (deg)
high
9.636
45.226
91.906
low
9.265
44.307
91.906
A
.371
.919
0
Finally the closest approach of the CASTLE was varied from 4000 km to 52,000 km by
increments of 4000 km. The results are shown in Tables A19 and A20.
Table A19 CASTLE Closest Approach Radius Variation for Hyperbolic Intercept
AV (knm/sec)
Transfer time (hrs)
01 (deg)
high
8.209
37.455
95.195
low
8.209
37.442
95.163
A
0
.013
.032
Table A20 CASTLE Closest Approach Radius Variation for Periapse Intercept
AV (km/sec)
Transfer time (hrs)
01 (deg)
high
11.232
97.534
95.012
low
8.370
37.864
89.987
A
2.862
59.67
5.025
The data from the parameter study produced the following graphs. The graphs of the Earth encounters
are shown first followed by the graphs for the Mars encounters. Transfer time and AV grouped
together when an input parameter is varied. The optimal 01 is not grouped with another output
parameter.
17
16
15
14
d
13 b
12
11
10
2
4
6
8
10
12
2
4
0
10000
V-infinity (kCI/sc)
6
8
V-Infinity (krmsec)
10
12
9.5
9
30
8.5
30
i 110
25
87
7.5
20
6.5
6
5.5
10
0
10000
20000
30000
40000
50000
CASTIIBQ et Appm•ah (km)
60000
20000
30000
40000
50000 60000
CASTLE Clomc Approach (km)
----
AVhyp
----
Time hyp
7.5
7
18
6.5
0
90
180
270
1is
120
14
115
360
0
90
Vector (deg)
Right Ascension of V-infinity
v hyp
--
270
14'5
----- m-ehyp
---ave=i i ll,I
180
Right Ascension of V-infinity Vector (deg)
l .- -Tipoi
17
140
b 135
,: ,
-- 15
-..-
130
.........
.................
14
............
125
r
...............
......
........
--
--
13
12
0
115
i-
12
-
110
10
105
-50
0
SO
100
Declination of V-infinity
Vector (deg)
-100
-100
-50
130
JIhJWItJAWLULLIIJAAAIALLLi ThL
7.5
0
50
Dedlinatin of V-infinity Vector (deg)
I
I
I
I
I
I i
I- .
125
--
7-
6.5 -
S
AV hyp
Time hyp
120
..
115
-
1111
I
III
~IIII
I
II
III
,, ,,i ,i ,, 8000850090009500
i ,, T , ,M , ,
650070007500
Parking Orbit Radius (kn)
"10
.
---.
......
110
5.5-
............ ............
..........
- --'lihewt hyp
105
i
6500
7000
I I
7500
I
I I
8000
I
I I
8500
I
9000
I
Parking Orbit Radius (kmlan)
9500
Mars parameter graphs.
95.5
95 -
..........
........... ..
.........
1
a pri
-- -
-----------
94.5 ----94
--
93.5
-.....................
93
-
---
92.5
4000
4500
5000
5500
6000
6500
-
--
923500
...........
91.5
Parking Orbit Radius (kin)
3500
4000
4500
5000
5500
6000
6500
Parking Orbit Radius (kmn)
I,
I I,I
10.5
9.5
-AV
8.5
,II
,
-
.
9
I I,
I II, I,
hyp
--
AV pe
. .
.
-s-Tim hyp
-a-Time prii
-
-
8-
-100
. . . ...I....
-50
0
I .
...
50
-100
100
-50
0
50
Declination od V-infinity Vector (deg)
Declination of V-infinity Vector (deg)
IIIII III
11.5
11
II,
I
IIII II
95
10.5
94-
10
>
I IIIIII
.............
i ............
.......
....
.......
......
.............
93
9.5
92 -
9
91-
8.5
90 -
"-i-,"
*-----------------harpen
8
8c
0
10000
20000 30000 40000
50000
CASTLE Closest Approach (Imn)
60000
I
0
ij
111111
10000
20000
I
30000
Ilij
liii
40000
1I
50000
CASTLE Closest Approach (kim)
60000
8-I gh
10.5-t
I II
I
I iI
II I ,
48f
40
. -48
o- ....... -- av r ..... ................. i
44
- ------- -9.5- f .......................
-42 E
-
•Te
~1---·-1--
i
I
I
I
180
90
0
i-40
1-~
-
i
8
p
36
I
I
0
360
270
Right Ascension of•V-infinity Vector (deg)
270
180
90
Right Ascension of V-infinity Vector (deg)
360
12
14
46
12
44
10
42
40
38
4
36
34
2
2
4
6
10
8
V-infmity (km•ec)
12
14
2
88
4
10
8
6
V-infinity (kinsec)
APPENDIX B
PROGRAM EOUATIONS
V-infinity characteristics
V. = V. magnitude
•. right ascension
c. declination
Parking Orbit characteristics
rp = rp periapse
Xp longitude
gp latitude
i - inclination of parking orbit
9 - ascending node of parking orbit
ra - apoapse of the initial ellipse
ra - apoapse of the intermediate ellipse
g - gravitational constant
The relative declination is
8. = sin -1( sin p.cos i - cos
i.sin i sin (. - Q))
and the argument of periapse is
S= cos -1 (cos u cos ()p - 2) )
y = cos -1
cos
C.* cos
(L.- )
)
cos
The angle between the periapse of the parking orbit and the projection of the V-infinity
vector onto the parking orbit plane is given by
The
follows
of
=parametersthe
parking
orbit
are
as
The parameters of the parking orbit are as follows
2rarp
ra+rp
2
ra - rp
ra+rp
r
=
+rp
The true anomaly at the first impulse is
T11 = X.-
-1
where 01 is the angle between V and the 1st impulse.
Then the radius and the velocity at the first impulse can be found by
ri
V11=gL( ri2 1a
1 +ecosl
The flight path angle at the impulse can be found using
VI sin pi --
=+1
rl
COO
e sin 11
2 +2 e cos
ee11
1+2+
2 e cos Tl
which enables the radius and flight path angle of the intermediate ellipse to be defined by
Srl (ra - rl) sin 01
rp=
r
2
ra - rlsin 01
1i = 31+ A,
Next the characteristics of the intermediate ellipse can be calculated
I IF
I p
2 ra rp
aa ra +rp
2
er raa +-rp
rp
+rarp
2
ra+rp
P
= 4r
r
A
'1 = cos -1 J-l
a()
a
The AV for the first impulse is found by
Avl =
[V2
,2
,
+V, - 2VIV 1 cos AP + 2(Vlsin
90
,
,
13)(Vlsin I1)(1 - cos
1
_
AA1)] 2
The next thing to calculate is the plane change angle using two of the degrees of freedom
tan 8. - tan AA1 sin 01
AA2 = tan -1[
sin (112 - rll) cos 01
- cos (112 - r 1)(sin 01 + tan 8. tan AA1)
cos AA1
The radius and the AV of the second impulse are found by
r2 =
P
V2 sinf
1 + e' cos 112
AV2 = 2 r2
r2
2
sin
(AA
2)
2
Next the angle between the V-infinity vector and the second impulse is calculated using
V = cos -1[sin (12 - 1rl) (cos 8. cos AA1 sin 01 +sin 8. sin AA1) + cos (112 - 111) cos 6. cos 01
and then the angle between the V-infinity vector and the periapse of the intermediate ellipse
is
02 = 112 + V
The following are calculated for convenience to speed computer calculations
cos v = cos (02 - 713)
sin v = sin (02 - 13)
where v is the angle between V* and the 3rd impulse.
Now the radius and velocity at the third impulse can be calculated as follows
r3 =
v2 = ( 2
1 + e' cos 113
a'
The flight path angle at the third ellipse is
sin 3-
s0,p'
=
r3V3
COS 3 =
and the velocity of the hyperbola at the third impulse is
h V
r3
1 - (in 3)2
To calculate the third and final AV the following intermediate variables have to be found
first.
r3V!
A=
h- 1 is given by q=
and q -
sin P3h=
AV 3 =
r3VhV.
Ssin v + ( + 2)2 - (cos v + 2)2
COS P3h
1=- (sin h)2
-IV 2 + V2 - 2 Vh V3(sin 03 sin Ph + COS 03COS Ph)
AVTotal = AV 1 + AV 2 + AV3
REFERENCES
Aldrin, E. E., "Cyclic Trajectory Concepts," SAIC Presentation to the
Interplanetary Rapid Transit Study Meeting, Jet Propulsion Laboratory, October 28, 1985.
Aldrin, E. E., "The Mars Transit System", Air and Space, pp41-47, Oct/Nov 1990.
Bate, R., Mueller, D., and White, J., Fundamentals of Astrodynamics, Dover
Publications Inc., New York, 1971.
Battin, R., An Introduction the the Mathematics and Methods of Astrodynamics,
AIAA Inc., New York, 1987.
Brykov, A., "Advantages of Space Stations at the Earth-Moon Libration Points",
Joint Publications Research Service in its USSR Report: Space No. 14 (JPRS-7971 1),
July 1981.
Byrnes, D. V., Personal Communication, June 15, 1990.
Crocco, G. A. "One Year Exploration Trip Earth-Mars-Venus-Earth", Proceedings
of the Seventh International Astronautical Congress, Rome, 1956, pp. 227-52.
a) Eagle Engineering, "Velocity Deltas for LEO to L2, L3, L4, and L5, and LLO to
L1 and L2", Eagle Engineering Report No. 88-208, September 30, 1988.
b) Eagle Engineering, "LEO to L1 Trajectory Program", Eagle Engineering Report
No. 88-219, October 30, 1988.
Friedlander, A. L., Niehoff, J. C., Byrnes, D. V., and Longuski, J. M.,
"Circulating Transportation Orbits Between Earth and Mars," AIAA Paper No. 86-2009CP, AIAA/AAS Astrodynamics Conference, Williamsburg, VA, August 18-20, 1986.
Friedlander, A. L., Telephone Conversation, June 15, 1990.
Gerbracht, R. J., "Three Impulse Transfers Between Elliptic and Hyperbolic
Trajectories", TRW Interoffice Correspondence, January 31, 1968.
Gerbracht, R. J., Penzo, P. A., "Optimum Three Impulse Transfer Between
Elliptic and Non-Coplanar Escape Asymptote", AAS 68-084, presented at the AAS/AIAA
Astrodynamics Specialist Conference, Jackson, WY, September 3-5, 1968.
Henry, P. K., Sergeyevsky, A.B., and Sharma, J., "Planetary Exploration
Departures from the Space Station: Trajectory Effects on Station Operations", JPL D6896-90 (Internal), Jet Propulsion Laboratory, Pasadena, CA, November 1989.
Hoffman, S. J., Friedlander, A. L., and Nock, K. T., "Transportation Mode and
Performance Comparison for a Sustained Manned Mars Base," AIAA Paper No. 86-2016CP, AIAA/AAS Astrodynamics Conference, Williamsburg, VA, August 18-20, 1986.
Hoggatt, V. E. and Meder, A. E. (ed), Fibonacci and Lucas Numbers, Houghton
Mifflin, Boston, 1969.
Hollister, W. M., "Castles in Space," Astronautica Acta., January 1967.
Hollister, W. M., "Periodic Orbits for Interplanetary Flight," AAS Paper No.68102, AAS/AIAA Astrodynamics Specialist Conference, Jackson, WY, September 3-5,
1968.
Hollister, W. M. and Menning, M. D., "Interplanetary Orbits for Multiple Swingby
Missions," AIAA Paper No. 69-931, AIAA/AIAA Astrodynamics Conference, Princeton,
NJ, August 1969.
Lawden, D. F., Optimal Trajectories for Space Navigation, Butterworths, London,
1963.
Lion, P. M.,"A Primer on the Primer", Aerospace Systems and Mission Analysis
Research Program, STAR Memo No. 1,Princeton University, 21 April 1967.
a) Niehoff, J., "Manned Mars Mission Design," Steps to Mars, Joint
AIAA/Planetary Society Conference, National Academy of Science, Washington DC, July
1985.
b) Niehoff, J., "Integrated Mars Unmanned Surface Exploration (IMUSE), A New
Strategy for the Intensive Science Exploration of Mars," Space Science Board, Woods
Hole, MA, July 1985.
Niehoff, J., "Pathways to Mars: New Trajectory Opportunities", The NASA Mars
Conference. AAS Science and Technology Series Vol 71, Washington D.C., July 21-23,
1986.
Nock, K. T., and Friedlander, A. L., "Elements of a Mars Transportation System",
Acta Astronautica, Vol 15 No 6/7, pp 505-522, 1987
Penzo, P.A., "Orbit/Deorbit Analysis for Mars Rover Sample Return Mission",
AIAA Paper No. 88-4231-CP, AIAA/AAS Astrodynamics Conference, Minneapolis, MN,
August 15-17, 1988.
Rall, C.S. and Hollister, W.M., "Free-fall periodic orbits connecting Earth and
Mars", AIAA Paper No. 71-92, 9th Aerospace Sciences Meeting, New York, N.Y.,
January 25-27, 1971.
Ross, S., "A Systematic Approach to the Study of Non-stop Interplanetary Round
Trips," Interplanetary Missions Conference (9th Annual AAS Meeting), Los Angeles, CA,
January 1963.
Roy, A.E., Orbital Motion, Adam Hilger, Philadelphia, 1988.
Sergeyevsky, A. B., Snyder, G. C., and Cunniff, R. A., Interplanetary Mission
Design Handbook, Vol 1,Part 2, Jet Propulsion Laboratory, JPL Publication 82-43, 15
September 1983.
Sergeyevsky, A. B., "Planetary Mission Departures from Space Station Orbit",
AIAA Paper No. 89-0345, Presented at the 27th AIAA Aerospace Sciences Meeting, Reno,
NV, January 9-12, 1989.
Seward, W.D., Steinberg, I.R., and Wolaver, L.E.,"Optimal Control of Libration
Point Space Station", Aerospace Research Labs Report No. ARL-71-0016, WrightPatterson AFB, OH.
Sharma, J., "Asteroid Mission Departure Strategies from a Precessing Space
Station Orbit", AIAA Paper No. 90-2913 , AAS/AIAA Astrodynamic Conference,
Portland, OR, August 20-22, 1990.
TRW, "Mars Mission Report" under Marshall SFC contract, 1964.
Vajda, S., Fibonacci and Lucas Numbers and the Golden Section, Halsted Press,
New York, 1989.
Wilson, S. W., "Analysis of Planetary Hyperbolic Departure Techniques", TRW
Note No. 67-FMT-591, December 22, 1967.
Wilson, S. W., Personal Communication, June-December 1990.