Controls for the Cooling Systems ... Multiplicity and Vertex Detector Rachel Cunningham Ancillary
advertisement

Ancillary Controls for the Cooling Systems of the
Multiplicity and Vertex Detector
by
Rachel Cunningham
Submitted to the Department of Mechanical Engineering
in partial fulfillment of the requirements for the degrees of
Bachelor of Science
and
Master of Science in Mechanical Engineering
at the
MASSACHUSETTS INSTITUTE OF TECHNOLOGY
-- Iay 1999
© Massachusetts Institute &fTechnology 1999. All rights reserved.
Author ..........
Department of Mechanical Engineering
May 18, 1999
.
David L. Trumper
Rockwell International Associate Professor
Thesis Supervisor
Certified by .........................
"..
-....-
.........
.7 ...................
Ain A. Sonin
aduate Students
Chairman, Department Committee on
A ccepted by .............................
GY
ENG
LIBRARIES
Ancillary Controls for the Cooling Systems of the
Multiplicity and Vertex Detector
by
Rachel Cunningham
Submitted to the Department of Mechanical Engineering
on May 18, 1999, in partial fulfillment of the
requirements for the degrees of
Bachelor of Science
and
Master of Science in Mechanical Engineering
Abstract
This report presents a summary of the design process and performance of the ancillary controls for the cooling systems of the Multiplicity/Vertex detector. All cooling
systems are described in detail, and the determination of final components is explained. Results of the latest system tests are given for all systems. Sensors used
to monitor the system are described, and fault charts along with sensor placement
strategies are used to determine both the final sensors to be used and the logic of
controlling the systems. Results of control system testing are followed by conclusions
and recommendations for those continuing with this project.
Thesis Supervisor: David L. Trumper
Title: Rockwell International Associate Professor
2
Acknowledgments
This thesis could never have been written without the constant and encouraging input
of all the members of Led Zeppelin. Thanks especially for "Stairway to Heaven" and
the entirety of Disc 4 of their boxed set. The distributors of Green Mountain Coffee
also deserve a brief mention in the same spirit of gratitude.
Thanks are due to David Trumper (my thesis advisor at MIT) and Jehanne SimonGillo (my supervisor at LANL) for their help with the actual writing of this thesis.
Jehanne was a great help in organizing my thoughts and helping me get my facts
right, and as for Professor Trumper... well, Chapter 5 would never even have existed
without him. He caught all my silly mistakes and made sure the thesis was somewhat
well-rounded from an academic standpoint.
Many people helped me with the actual work done for this project; thanks to to
Hubert van Hecke, Jehanne Simon-Gillo, Jan Boissevain, Larry Marek, Dave Jaffe,
and Richard Conway, who was always willing to take a juggling break with me.
Morgan Wascko will always have a place in my heart for telling me what a sea quark
is.
Honorable mention for helping me goes to Luke Sosnowski, for telling me to "bring
a weapon and negotiate from a position of power" when I was stressing about meetings
with my advisor, and Michael McComas and Monica Bhattacharya and my parents,
who were just very nice to me all term even if they didn't help me write my thesis.
This list could not be complete without a mention of Serabi, whose small feline
life started when this thesis did; and Alan, who makes so many things seem possible.
Thanks for being my family this year.
3
Contents
1
Introduction
10
1.1
Overview of PHENIX . . . . . . . . . . . . . . . . . . . . . . . . . . .
11
1.2
Overview of MVD operation . . . . . . . . . . . . . . . . . . . . . . .
12
1.3
Overview of cooling and cooling-related ancillary systems . . . . . . .
15
2 The Liquid Cooling System
3
2.1
Introduction to the Liquid Cooling System . . . . . . . . . . . . . . .
20
2.2
Experimental Setup for Ancillary Tests . . . . . . . . . . . . . . . . .
21
2.2.1
24
Sensor placement for Liquid System . . . . . . . . . . . . . . .
The Air Cooling System
3.1
3.2
3.3
4
20
26
Introduction to Air Cooling System . . . . .
. . . . . .
26
3.1.1
Purpose and Requirements . . . . . .
. . . . . .
26
3.1.2
Challenges in Design . . . . . . . . .
. . . . . .
27
3.1.3
The Current Design . . . . . . . . . .
. . . . . .
29
Experimental Setup . . . . . . . . . . . . . .
. . . . . .
34
3.2.1
Sensor Placement for Cooling Tests
. . . . . .
38
3.2.2
Sensor Placement for Ancillary Tests
. . . . . .
39
. . . . . .
40
Ongoing Work . . . . . . . . . . . . . . . . .
The Ancillary Control System
42
4.1
System Requirements and Overview . . . . . . . . . . . . . . . . . . .
42
4.2
Logic of Sensor Placement . . . . . . . . . . . . . . . . . . . . . . . .
43
4
. . . . . . . .
47
The Test Setup . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
54
4.3.1
Selection and Installation of Sensors . . . . . . . . . . . . . . .
54
4.3.2
Insertion of Sensors into Cooling Systems . . . . . . . . . . . .
63
. . . . . . . . . . . . . .
66
4.2.1
4.3
4.4
4.5
5
Fault Charts With and Without Sensor Failure
Implementation of Controls and Monitoring
4.4.1
Hardware
. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
66
4.4.2
The Monitoring Program . . . . . . . . . . . . . . . . . . . . .
81
Conclusions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
83
84
Closed Loop Control
5.1
Modelling the Air Cooling System . . . . . . . . . . . . . . . . . . . .
84
Derivation of State Equation . . . . . . . . . . . . . . . . . . .
86
Closed-Loop Control . . . . . . . . . . . . . . . . . . . . . . . . . . .
89
Closed Loop Control . . . . . . . . . . . . . . . . . . . . . . .
91
C onclusions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
95
5.1.1
5.2
5.2.1
5.3
A Source Code for Monitoring Program
96
107
B Infinite Slab Analysis of MCMs
B.1 Assumptions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
107
B.2 Calculations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
108
5
List of Figures
1-1
The MVD, not showing the outer enclosure.
. . . . . . . . . . . . . .
1-2 The MVD, showing the outer enclosure but not the silicon detectors.
13
14
1-3 An overview of the air cooling system; the MVD, shown at the top of
the picture, is about 0.80 meters long.
. . . . . . . . . . . . . . . . .
16
1-4 A Rohacell C-cage populated with six silicon pad detectors, and connected to a plenum block containing six MCMs. . . . . . . . . . . . .
18
2-1 The schematic of the liquid cooling system. . . . . . . . . . . . . . . .
22
2-2 Assembly of the liquid cooling system.
. . . . . . . . . . . . . . . . .
23
2-3 The prototype of the liquid cooling system. . . . . . . . . . . . . . . .
24
2-4 The prototype of the liquid cooling system. . . . . . . . . . . . . . . .
25
3-1
The heat exchanger assembly, showing dehumidification coils . . . . .
30
3-2
A schematic of the air cooling system alone. . . . . . . . . . . . . . .
31
3-3
A cell from the Rohacell plenum, attached to a C-cage. . . . . . . . .
33
3-4 The blower assembly, with no visible means of support. . . . . . . . .
35
3-5
A schematic of the air cooling system alone. . . . . . . . . . . . . . .
36
3-6
The mockup of the air system (author included for scale). . . . .
37
3-7
Photograph of MVD mockup. Note horizontal plenum (white, near
bottom) and aluminum support member (near top). . . . . . . .
39
3-8
Schematic of air cooling system, showing sensors.
40
4-1
A conceptual representation of the ancillary control system.
. . . . .
43
4-2
Cooling system schematic showing sensors. . . . . . . . . . . . . . . .
45
6
. . . . . . . .
4-3
Pinout of the ADT14 (DIP package). . . . . . . . . . . . . . . . . . .
55
4-4
Circuit board for one ADT14 temperature sensor. . . . . . . . . . . .
56
4-5
One ADT14 temperature sensor attached to copper tubing. . . . . . .
57
4-6
Pinout for the TMP12 air flow sensor (DIP package).
. . . . . . . . .
58
4-7
Photograph of a sensor insertion board for ADT14 and TMP12.
. . .
59
4-8
Schematic of a sensor insertion board for ADT14 and TMP12. . . . .
60
4-9
The Omega HX-49-D-V humidity sensor, showing intended method of
mounting to a surface. . . . . . . . . . . . . . . . . . . . . . . . . . .
61
4-10 An illustration of the operation of the liquid level sensor. . . . . . . .
62
4-11 An Omega liquid flow sensor very similar to the one we used. . . . . .
63
4-12 A photograph of the liquid system used for testing the ancillary system. 64
66
4-13 Photograph of the sensor insertion board.....................
4-14 Schematic of the sensor insertion board.
. . . . . . . . . . . . . . . .
67
. . . . . . . .
68
. . . . . . . . . . . . . . . .
70
. . . . . . . . . . . . . . . . .
71
4-18 Connectors on the front of the distribution board. . . . . . . . . . . .
72
4-19 A photograph of the relay board as it was being tested. . . . . . . . .
73
4-20 A schematic of the relay board. . . . . . . . . . . . . . . . . . . . . .
74
4-21 Pinout and truth table for the latch (HCT74) chip. . . . . . . . . . .
76
4-22 A schematic of the latching circuit. . . . . . . . . . . . . . . . . . . .
77
4-23 Reset as opposed to propagate. .....
78
4-15 The sensor insertion board in 2" tubing (not to scale).
4-16 A photograph of the distribution board.
4-17 A schematic of the distribution board.
.....................
. . . . . . .
79
4-25 Photograph of relay boxes, showing one open and one closed. . . . . .
80
5-1
Diagram of the air cooling system for control analysis . . . . . . . . .
85
5-2
Step response of system to a 100 step in air temperature. . . . . . . .
89
5-3
Frequency plot of the uncompensated system.
. . . . . . . . . . . . .
91
5-4
The system with a pole added at the origin.
. . . . . . . . . . . . . .
92
5-5
Block diagram of the system with unity feedback and PI control. . . .
93
4-24 Photograph of dip switches used for testing relay board.
7
5-6
Frequency response of the system with PI control. . . . . . . . . . . .
94
5-7
Step response of the system with PI control. . . . . . . . . . . . . . .
94
B-i Electrical analogy for infinite slab analysis. . . . . . . . . . . . . . . . 108
8
List of Tables
. . . . . . .
46
. . . . . .
48
4.3
Fault chart for the air cooling system (continued). . . . . . . . . . . .
49
4.4
Fault chart for the air cooling system (continued). . . . . . . . . . . .
50
4.5
Fault chart for the liquid cooling system. . . . . . . . . . . . . . . . .
51
4.6
Fault chart for the air cooling system, allowing sensor failure. . . . . .
52
4.7
Fault chart for the liquid cooling system, allowing sensor failure. . . .
53
4.8
A listing of connector pins needed for the sensors. . . . . . . . . . . .
69
4.9
Sample output of current program for one half of the MVD.
82
5.1
Table of variables utilized in Chapter 5.. . . . . . . . . . . . . .
86
B.1 Table of values used in slab analysis of MCMs. . . . . . . . . . .
107
4.1
Minimal cut sets for shutdown of each half of the MVD.
4.2
Fault chart for the air cooling system (see also next page).
9
. . . . .
Chapter 1
Introduction
This thesis focuses on the design and implementation of an ancillary control system
for the two cooling systems of the Multiplicity and Vertex Detector (MVD), which
is being built at Los Alamos National Laboratory as part of a physics experiment.
In operation, the MVD generates approximately 710 W of heat, which is removed by
means of one air cooling system and one liquid cooling system. As the proper functioning of these systems is critical to the proper operation of the MVD, I developed a
system capable of monitoring the systems, making a logfile of their performance, and
shutting down power to the cooling systems and the MVD in the case of unacceptable
performance.
Chapters 2 and 3 describe the two cooling systems in detail. I spent the summers
of 1996 and 1997 helping to design these systems, and part of the summer of 1998
building a test setup for a nearly finalized design of the air cooling system.
Chapter 4 is an analysis of the air cooling system introducing the idea of ancillary
control for the two cooling systems. The chapter deals with both the logic and
implementation of the ancillary system, and describe the development of the system
from the most conceptual stages to the testing of a working prototype. The design is
being finalized at Los Alamos National Laboratory this spring (1999), and I include
some information on recent work that may be relevant.
In Chapter 5 I explore the idea of closed-loop control for the air cooling system
alone. The current system has a monitoring program and a hardware control system
10
that has power to shut the cooling systems down along with the rest of the MVD
if the system's performance is unacceptable, and uses feedback only in that human
operators have the ability to change system settings on the basis of visual readouts
from the system. Chapter 5 suggests a feedback control system using a temperature
sensor to control the operation of the system in a closed-loop fashion.
1.1
Overview of PHENIX
The PHENIX experiment at the Relativistic Heavy Ion Collider (RHIC) at Brookhaven National Laboratory is being built for the purpose of detecting a new phase
of matter, quark-gluon plasma, and investigating its properties. The collider will be
capable of accelerating gold ions to 100 GeV per nucleon in each colliding beam [8] .
Both RHIC and PHENIX are currently under construction, and their completion is
expected in 1999.
Because a quark-gluon plasma is believed to have existed in the early moments
of the universe after the Big Bang, the PHENIX experiment may help to answer
questions about the origins of the universe. PHENIX also hopes to determine the
spin structure of the proton, since it is currently known that the three component
quarks do not carry all of the spin. The rest of the spin might be carried by gluons, sea
quarksi, both of these in combination, or by a currently undiscovered mechanism [8].
PHENIX will employ three electromagnets, four instrumented spectrometers or arms,
and two inner detector systems.
The Multiplicity and Vertex Detector, or MVD, is the most central of the detectors
used by PHENIX. The P-25 group at Los Alamos National Laboratory is taking the
lead role in the design and construction of this detector. The MVD will employ
silicon sensors close to the point of beam collision to provide event characterization, a
centrality trigger, and the collision vertex position. It will also search for fluctuations
in the distribution of charged particles.
'A quark in a bound state which is not a valence quark [12].
11
1.2
Overview of MVD operation
The Multiplicity and Vertex Detector (MVD) is equipped with silicon strip detectors
arranged in two concentric barrels around the beam pipe in the center of PHENIX,
and endcaps consisting of a single layer of silicon pad detectors. These strip detectors, combined with suitable vertex finding algorithms, are intended to be capable of
determining the location of each collision to approximately 100 pum in each of three
dimensions [8].
The strip and pad detectors also measure the number of charged
particles created in the collision. This number correlates to the density of the system
formed in the collision, and thus yields information on the character of the event.
The detector system also utilizes custom designed front-end electronics boards called
multi-chip modules, or MCMs. Each of the four MVD endplates contains a motherboard capable of supplying power to the MCMs and transmitting information to and
from them via power/communication boards mounted below the MCM plenum.
In normal operation, the MVD will detect charged particles with the silicon strip
and pad detectors. This data will be read out by the MCMs, and passed through the
power/communication boards and other custom MVD interface modules before being
merged with the data coming from other PHENIX detectors. The data will be stored
at the RHIC Computing Facility. A database manager called EPICS will be used
to create an indefinitely expandable database containing the raw data, and various
software algorithms will be used to determine the vertex of the collision and other
relevant parameters. A continuous display of the state of the MVD and its subsystems
will be shown on a workstation in the PHENIX central control room. Various ancillary
systems, including one for the cooling systems presented in this thesis, will provide
automatic control of the MVD's environment and operation.
These systems will
have the authority to shut down part or all of the MVD in situations when further
operation would be hazardous to its electrical components or otherwise detrimental.
Each half of the MVD can operate independently of the other, so that data can be
taken with one half if the other half cannot continue operation.
Because all particles resulting from the collisions must pass through the MVD
12
I---------wn--
1
2
3
4
5
6
7
2
3
(D
1-1
6
-
0
8
4
9
10
11
5N-
1
1
1
4
8
1
1
1
1
6
6
002-0201-040,
002-0201-090,
002-0201-024,
002-0201-016,
002-0201-015,
002-0201-091,
002-0201-041,
002-0201-023,
002-0201-094,
002-0201-098,
002-0201-100,
ENDPLATE ASSY A
PAD DETECTOR ASSY A
TOP STRUT ASSY
FULL POP. CAGE ASSY
PART. POP. CAGE ASSY
PAD DETECTOR ASSY B
ENDPLATE ASSY B
BOTTOM STRUT ASSY
MOTHERBD SUPPORT BLOCK
POWER/COMM. CIR. BD A
POWER/COMM. CIR. BD B
4
C+
W
..--
(D
9
10
-
cAwrIATIns
szw1miM
clim Z
ofi
rVAI
o
U
MAT .
7-2-9
~MP
P-25
ORIGINAL ISSUE
LOS ALAMOS
-
-
T1tLE
MVD
LOSALAMOS
NATIONAL
LABORATORYHALF
NEWMEXICO,87545
LOSALAMOS,
lamwmxi-n..... anmiau wival
.. __
x.6 O. .
0...
.Oc.
-
MEIX
MAUI
Em.s
ASSEMBLY
I.
002-0201- 141
=
Wt
0.
126Y267698
m
as=
B
0.
1
----P
1
523
'-1
1
2
1 002-0201-10,
3
1
4
2
5
r
i-
002-0201-042, MVD TRUSS ASSEMBLY
MVD INNER COVER ASSY
002-0201-113, MVD OUTER COVER ASSY
002-0201-105. INNER RETAINING RING
2 1002-0201-112, OUTER RETAINING RING
(D
0
r+~
cuestrTImls
awsms
NMIr TIuMeAcu
atleLOS
NOMa
_MEOS
ORIGINAL ISSUE
my
MvIsMSe
7-19-07
P-251LSAAO
:rwDISVI
mum
C+2
--
ALAMO
--
MN
-
gg
-
-
a
MVD RF ENCLOSURE
NATIONAL
LABORATORY
ASSEMBLY
LOS ALAMOS,NEW MEXICO,87545
=UAWMa-ms
MU=SU
= Wre:
eu camIM.~
o
002-020 1 -114
x-A__.O~AK -a_0
ea
s sA
mc
ISmM.
SIZENO.
.x.__o..a
,'.
126Y267679
[
1
----------------------------------------------------------------------------------------------------------------------------------------------------
I
before encountering other detectors in PHENIX, the MVD is designed to be as low
in mass as possible, consisting mainly of the instrumentation shown and an outer
enclosure that creates a controllable environment within the detector. The MVD has
been designed so that most of its mass falls outside the acceptance in which electron
and photon-sensitive detectors are located; these detectors are centrally located above
the MVD. Many of the electronic components and the majority of the MVD's metal
components are therefore located below the MVD or in the endplates.
1.3
Overview of cooling and cooling-related ancillary systems
The MVD requires cooling systems for two primary reasons. The first is that the
MVD contains electronics that have been fabricated using a CMOS procedure, and
these electronics cannot operate at temperatures above 50'C. In addition, if radiation
damage to the silicon detectors occurs, their signal-to-noise ratio can be improved by
lowering their temperature.
Due to these concerns, the cooling systems must be
capable of maintaining the temperature inside the MVD at 25'C or lower, preferably
with the capacity to cool it to 10*C in case of radiation damage.
The MVD produces approximately 710 W of heat that must be removed without
adding significantly to the mass of the MVD; therefore, the cooling system responsible
for removing most of the heat is a closed-loop air cooling system. This system removes
the majority of the heat produced by the MVD, as well as providing humidity control
inside the entire MVD (both the main enclosure and the horizontal plenum that
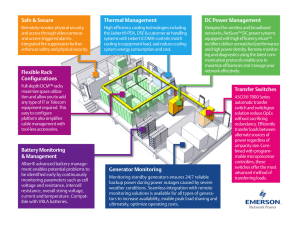
houses the MCMs). This system will be discussed in detail in Chapter 3; a large-scale
view of the system is shown in Figure 1-3. This picture shows the relative placing of
the air cooling components relative to the MVD, and gives an idea of the scale of the
project.
Humidity control within the enclosure is also necessary due to the nature of the
mechanical supports for the silicon strip detectors. These supports are C-shaped
15
DRAWINGSPARTe
SIGNATURE
ORIB
DRAWN
ORIGINAL ISSUE
EVIION
a MI_VEWREVISIONS
-
CLASSIFICATIONs
TITLE BLOCK
DATE
BOISSEVAIN 7-24-97
GRO
P-25
R
LOS ALAMOS
CHECKED
LOS ALAMOS NATIONAL LABORATORY
LOS ALAMOS, NEWMEXICO, 87545 1
PROJ
TOLEPAIICE-(UNLESS OTHEWISE N
APPROVED
X=
REEASED
.X=*
_
O.XX
=*
ANB*
O.X)O(=*
FIN=
TITLE
DAE
DATE
-1APPROVED
IC*{ANEDOCH-ECKED
BY
BY
BY
MVD
PHENIX DRAWING NO. 002
_
SCALE
TOTAL
- 020 1 - 1 46
ORAWING NO.
126 Y267699
SIZE
NO.
A
1
Figure 1-3: An overview of the air cooling system; the MVD, shown at the top of the
picture, is about 0.80 meters long.
16
cages made of Rohacell 71, a polymethacrylimide foam with very low mass and high
stiffness 2 . A typical Rohacell C-cage is shown in Figure 1-4. This foam is hygroscopic, so that large changes in specific humidity could cause changes in the shape
and position of the Rohacell barrel overall [7, 17]. This would shift the position of the
silicon strip detectors, resulting in reduced accuracy of the vertex finding algorithms
currently in place (vertex finding accuracy could be restored with proper recalibration). To avoid these events, the specific humidity within the MVD enclosure is to be
maintained at the same specific humidity the Rohacell cages were exposed to at the
time of machining. This value was chosen to be between 0.0045 and 0.009 kg water to
kg air, which corresponds to a relative humidity of approximately 30% at 230 C [10].
The second cooling system in the MVD is a liquid cooling system, designed to accomodate the low-voltage-dropout regulators, or LDOs, that supply regulated power
to the MCMs. The LDOs dissipate too much heat in a small area for air cooling to be
effective, according to a recent calculation by Jan Boissevain; however, their location
on the motherboards allowed the use of a liquid cooling system. They are outside
the electron acceptance, so that the extra mass is acceptable. Excess heat, amounting to a maximum of 30 W per motherboard, is removed from the LDOs via a 1/4"
aluminum tube carrying FC-75, an inert fluid that will not cause electrical shorts in
the case of leakage. This system will be described subsequently in Chapter 2.
Because the functions provided by these cooling systems are vital to the proper
functioning of the MVD, I developed an ancillary system to monitor the cooling
systems (with considerable assistance from Hubert van Hecke and Sangkoo Hahn,
among others). The ancillary system monitors vital parameters such as air temperature and humidity inside the air flow loop, and displays them on a screen in the
Countinghouses. This system also has authority to control the cooling systems under
normal operating conditions, and to shut down operation of the MVD if a serious
error state is detected in measurements deemed to be critical. The ancillary system
2
The grade of Rohacell we chose has a density of 75 kg/m 3, tensile strength of 270 psi, and a
coefficient of linear expansion measured at 3.3 x 10- 5 K 1 [7].
3
The Countinghouse is a room from which the various detectors of PHENIX can be monitored.
Access to the experimental hall itself is severely limited, as I discuss further in Section 3.1.2.
17
oT1
(D.
0
7Mm
O1
1
2
3
4
5
6
7
0
1
1
1
1
i
1
i3ii
cq
an"wrIM
002-0201-001,
002-0201-003,
002-0201-004,
002-0201-005,
002-0201-006,
002-0201-007,
002-0201-008,
002-0201-014,
ROHACELL FOAM CAGE
INNER BOT SILICON ASSY
INNER MID SILICON ASSY
INNER TOP SILICON ASSY
OUTER BOT SILICON ASSY
OUTER MID SILICON ASSY
OUTER TOP SILICON ASSY
CENTRAL PLENUM ASSY
0
OS
cn
O
(D
-
00
(D
0
z
CAmenIFe.Il
AMWtim
(D
4.0 TYP.
0
(D
(D
.m
TMtE ILMSC
77
.MT;x
.E
muJ
ArMm
mgaSeEmo
IGnA
mviVo Im
LOS ALAMOS
..
D
8.0
DI MENSIONS; MM
PAMTI
OIAN
7/l*AW
apega
CII0
ANE og
*MDa~AP
CENTRAL SILICON MODULE
P-= LOSALAMOS
NATIONAL
LABORATORY
FULLY POPULATED
fmaLOS ALAMOS,NEWMEXICO,87545
mx meIN No.002-0201
r
Ionm mm)
-m.*wm
.
ns-ae.Xa
.
c
a &.
o.jiDAl
M M.1
eIM.
- 016
s im
i
1 26Y267695B
.
for the cooling systems of the MVD is the main focus of this thesis.
19
Chapter 2
The Liquid Cooling System
2.1
Introduction to the Liquid Cooling System
The purpose of the liquid cooling system is to remove the heat loads imposed upon
the environment of the MVD by the low dropout regulators (LDOs) mounted on
each of its four motherboards. The LDOs themselves stop functioning at 70' C, and
they are physically close to CMOS electronic components that will cease to function
properly at about 500 C, so it is important that heat is not allowed to build up in
their vicinity.
Each of the MVD's four endplates contains a motherboard, which supply power
to the MCMs and transmit data to and from them. Because the MCMs require very
clean power, 35 low dropout regulators (LDOs) are mounted on each motherboard
to control the voltages supplied to the MCMs. For each set of six MCMs there is a
corresponding set of 5 LDOs, of which three dissipate significant waste heat (of at
most 1 W apiece). This waste heat must be removed to ensure reliable operation of
the motherboard and its associated CMOS electronic components. Because the MVD
may be run one half at a time, we are building two independent and identical liquid
cooling systems corresponding to the two halves of the MVD.
Convection air cooling was determined to be an inadequate means of temperature
control for the LDOs [6]. Unlike the MCMs and power/communication boards, the
LDOs dissipate a relatively large amount of heat over a small surface area (10 mm x
20
15 mm apiece). Space constraints also limit the size of any cooling system to an area
extending 9 mm from the motherboard on the side opposite the LDOs1 . However,
added mass was acceptable in this area due to the LDOs being outside the electron
arm acceptance. The feasibility of a liquid cooling system was therefore considered
and found satisfactory, and several studies by myself and others over the last three
years have validated the design concept [4, 3].
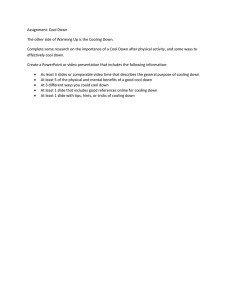
The schematic of the final design of this cooling system can be seen in Figure 2-1.
My primary contribution to the design, made during the summer of 1996, was the
shape and position of the tube carrying the cooling fluid. This shape minimizes the
distance between each of the LDOs and the tube, so as to enhance heat transfer
to the coolant, and eliminates the possibility of leaks within the MVD by placing
all tubing connections outside of the MVD. Later concerns about leakage led to the
decision to use FC-752 as the cooling fluid, so that any leakage would not lead to
shorts in electronic equipment. Because FC-75 has a lower heat capacity than water,
the projected flow rate of coolant must be 8 times greater than that required with
water [3], or approximately 1.31 m/s.
2.2
Experimental Setup for Ancillary Tests
For the purpose of testing a prototype control system, there was no need to assemble
the liquid cooling system with its final components. It was especially desirable to avoid
using a real motherboard or FC-75, due to the very high cost of these components.
Therefore, Hubert van Hecke and I constructed a prototype of the liquid cooling
system in such a way that the mechanisms for controlling it are identical to those
of the final system. The critical values of temperature and flow at which controlling
action takes place are of necessity different from those expected in the final system.
'These same space constraints as well as the limit on the MVD's mass prevented us from simply
mounting the LDOs on an aluminum heat sink, which would have aided the removal of heat from
the area.
2
A fluid from 3M Electronic Products Division. Its low dielectric constant of 1.86 at 250 C
significantly reduces the chance of electrical shorting in the case that the liquid leaks out onto
electrical components[4].
21
T5
F4I
Water/FC-75 heat exchanger
Figure 2-1: The schematic of the liquid cooling system.
A picture of the experimental setup can be seen in Figure 2-3. The tubing lengths
are considerably shorter than those in the final system, and water was used to cool
the loop instead of FC-75. These modifications allowed the system to be tested in
a convenient location and reduced the cost of coolant spills considerably, while not
changing the basic operation of the system. An Omega LX70 centrifugal pump was
used to circulate the water, as will be the case in the final system. The one functional
difference was the absence of a heat load, which has since been added to the system3 .
At the time we were most concerned with proper operation of the sensors and were
not concerned with reproducing realistic temperatures.
In constructing this prototype, we found that the centrifugal pump tends to collect
any air in the lines. This causes unacceptable liquid velocity, and makes it difficult
to get all the air out of the system. Since no prototype of the liquid system so far
had utilized this pump, we had not predicted the problem. We now know to watch
3
The heat load consists simply of six resistors wired so that they are capable of evenly distributing
heat loads over the range expected from the real LDOs (10 to 30 W total). These are mounted in
a realistic geometry on one side of a piece of G10, the material used to make the motherboard, and
the cooling tube passes by them on the other side of the G1O
22
|---------m
54.4-
-
1 1 002-0201-046, MOTHERBOARD A
2
1 002-0201-049, LDO COOLING TUBE A
134.3-
100.0
*
2.
0~
0oD C3C
1ae.0
o0
0-
uO rM. er.
i-iR
___u__
MAil
i
-
cLAuWICCAI,
T:1E..fx=<
i i
ISEVAIN 7-17-07
am
-mj
n
--
ORIGINAL ISSUE
LOS ALAMOS
P-25
I
-
-
-
M=::a
owse
my
%as T
MVD
MOTHERBOARD
LOSALAMOS
NATIONAL
LABORATORY
ASSEMBLY
A
87545
LOSALAMOS.
NEWMEXICO,
ND-m-naenem
x..
o.ot..
na..
.x..
o.s-a.
rnf.
si., neux AUIU I. 002-0201 -050
s___
1er6
mann
W.
12BY267892
.s
B
W.
4
Figure 2-3: The prototype of the liquid cooling system.
for this in the final production of the system.
2.2.1
Sensor placement for Liquid System
The flow and temperature sensors in the flow loop are labelled in Figure 2-4 as F4,
T4, and T5, 4 where T represents a temperature sensor and F represents a flow sensor.
Several sensors not affiliated with ancillary controls will also supply analog indications
of temperatures on the motherboards.
The temperature sensors are positioned as near to the MVD as possible so that the
total heat load imposed by the motherboard can be monitored accurately. Section 4.2
provides more detail on the logic of sensor placement for both cooling systems.
4
The numbering here is based on a schematic shown later in Figure 4-2, which contains both
liquid cooling systems and both air cooling systems.
24
Figure 2-4: The prototype of the liquid cooling system.
25
Chapter 3
The Air Cooling System
3.1
3.1.1
Introduction to Air Cooling System
Purpose and Requirements
The purpose of the air cooling system is to control the humidity inside the enclosure
of the MVD while removing the heat loads imposed upon the MVD by the MCMs,
the power/communication boards, and the environment.
Control of the humidity
inside the enclosure ensures proper positioning of the Rohacell cages and therefore
the silicon strip detectors, as discussed in Section 1.3. Control over the temperature of
the enclosure is necessary both to ensure the continued function of CMOS electronic
components, which fail to perform properly beginning at 50' C, and to allow for
the possibility of radiation damage to the silicon pad and strip detectors (if damage
occurs, lowering the temperature of the detectors will improve their signal-to-noise
ratio and thus their ability to transmit accurate data).
Because each half of the
MVD must be able to function independently of the other, there are two identical
and independent air cooling systems corresponding to the two halves.
Aspects of several systems designed to perform these functions have been investigated by myself and others [3, 4, 8, 10]; however, recent design changes now call upon
one unified system to handle all the above tasks [6]. This thesis therefore goes into
some detail regarding the design of the air cooling system and the performance of a
26
new prototype designed to mimic the final system as closely as possible.
3.1.2
Challenges in Design
The task of designing the air cooling system was made more difficult by the fact that
it had to be compatible with the other systems in PHENIX. Because the majority of
my work with the air cooling system was done in 1997 and is now out of date, I will
not go into the details of this work or the selection of the final components of the
system. However, a brief overview of the challenges we faced in designing the system
may help to clarify the ideas behind the design.
The mass constraints on the MVD have already been briefly mentioned; they have
to do with a limit on the radiation length' of the parts of the MVD within the electron
arm acceptance. The design team is trying to limit the absorption length of the MVD
to about 1% of a radiation length and the current design uses 0.756% to 0.993% of a
radiation length depending on the radial direction [9]. This limit effectively removes
the possibility of using a heat sink to help cool the MCMs due to the added mass it
would entail.
In addition, there are severe space constraints due to the existing geometry of
PHENIX. The MVD cannot place its cooling components within about 3 meters of the
detector due to the other detectors in the system and the geometry of PHENIX; it has
instead been allotted some of the pockets near the base of PHENIX, as shown earlier
in Figure 1-3. These space constraints contributed to problems with the design of the
blower and heat exchanger assemblies, which will be discussed further in Section 3.1.3.
The final constraints on the design are imposed by the management of PHENIX. In
theory, personnel will only be allowed into the main experimental hall once every three
months2 for maintenance and/or repair of the equipment. This required us to choose
components requiring as little maintenance as possible. In addition, as of 1998 all
motors are required to be explosion-proof, because another detector contains several
'The expected distance an electron can travel through a material before it is absorbed.
2
Access may be even more rare than this, because procedures are still being finalized by PHENIX
management.
27
cubic meters of an ethane mixture that could escape and subsequently explode if a
spark were produced in the hall. All components were already required to be fireproof
or extremely fire resistant.
Humidity Control Issues
I performed several tests on the air cooling systems of the MVD in the summers of
1997 and 1998.3 One of the most important goals of these tests was to ensure that
that the humidity in the cooling loop and the MVD can be reduced to approximately
0.007 kg water per kg air and maintained at that level, as mentioned above.
Experimental investigations of several different methods of humidity control have
shown that the only reliable method was the use of an air/fluid heat exchanger consisting of a copper coil maintained at about -10' C [10]. Other methods, such as the
insertion of nitrogen into the flow loop or the use of dessicant, proved to be very sensitive to small leaks in the loop. These also would require more frequent maintenance
and be harder to control than an additional flow loop of cold fluid.
Although icing can be expected with the use of the -100 C copper coil, we do not
anticipate this to be a serious problem because the humidity system will not need
to run continuously. My testing of the system in the summer of 1998 showed that
it takes less than 15 minutes for the humidity in the cooling loop to come down to
acceptable levels. Once most of the water is removed from the loop, we can expect the
humidity in the loop to grow quite slowly unless the system is much leakier than we
anticipate. When we are not actively dehumidifying the system, the chiller involved
in the process can simply be turned off for short periods of time, 4 and the coils will
then be temporarily warmed to the temperature of the rest of the loop (10 to 200
C). The dehumidifier removes only about 11% of the total heat removed by the heat
exchanger box, according to recent tests performed by Hubert van Hecke. However,
earlier experiments show that icing on the coil may not be a problem, and it is unclear
3
Working
4
with John Bernardin in 1997, and Lary Marek and Hubert van Hecke in 1998.
The dehumidifier removes only about 11% of the total heat removed by the heat exchanger box,
according to recent tests performed by Hubert van Hecke.
28
whether such a plan will need to be implemented.
The current design combines the dehumidifying coils with pre-existing heat exchangers that cool the air without incurring condensation, so that all chilled surfaces
reside within one insulated box. This heat exchanger box is shown in Figure 3-1. A
drip pan below the copper coils catches the condensed water, and a liquid level sensor
controls a valve that drains the water out when it has filled the pan to a certain level.
3.1.3
The Current Design
A schematic of the final design of the cooling system is shown in Figure 3-2. Because
each half of the MVD must be capable of taking data without the other, separate air
flow loops are used for each half of the MVD to maximize the independence of the
two halves. The large heat loads and pressure drops in the system also made it easier
to find suitable components for a system designed to cool half the MVD. Each air
cooling loop consists of an air blower, an air/water heat exchanger, a dehumidifying
unit, two water chillers, and insulated tubing, as well as sensors used to detect flow,
temperature and humidity at various locations in the loop. The loop splits into two
parallel flow channels after passing through the heat exchanger box; one channel
goes through horizonal and radial plenums containing the MCMs, while the other
channel is directed through the main enclosure of the MVD. This second channel is
responsible for removing the heat loads imposed by the power/comm boards and the
environment. The two loops share a joint return line to the blower.
Within the MVD, the air flow is distributed unevenly to cool the various electronic
components. About 2/3 of the air flow is confined to channels that surround the
electronics with the highest heat loads [2], namely the MCMs and the pad detector
MCMs, which together account for 272 W per MVD half. The remaining air is
diverted into the main enclosure of the MVD. This air stream has a much lower
velocity than the first.
It must effectively remove environmentally imposed heat
as well as the heat load of the power/communication boards, a total of about 130
W, while not introducing vibration significant to the positioning of the silicon strip
29
HEAT EXCHANGERS
SUPPLY & RETURN
DEHUMIDIFIER COILS
SUPPLY & RETURN
DEHUMIDIFIER COILS
LYTRON 6210
HEAT EXCHANGERS
MCM COOLING
OUTLET
DEHUMIDIFIER
DRIP TRAY
MVD ENCLOSURE
COOLING OUTLET
Figure 3-1: The heat exchanger assembly, showing dehumidification coils.
30
MVD main enclosure (100 W)
MCM plenum (272 W)
Filter
Air/water heat exchanger
Dehumidify
0
Cool
Figure 3-2: A schematic of the air cooling system alone.
31
detectors.5
The silicon detectors operate at the ambient enclosure temperature and are connected to the front-end electronics (MCMs) by kapton cables. The MCMs are spaced
evenly within a foam plenum that provides a clear channel for cooling air, and the
cables enter through the top of this plenum as shown in Figure 3-3. This physical
separation provides thermal isolation of the silicon and reduces any vibratory impact
the air flow might have on the detectors themselves. Studies have shown that this
induced vibration is slight enough so as not to impact the structural integrity of the
Rohacell C-cages or the collection of data [5].
Recent Contributions to Design
While my testing of the air cooling system in 1998 was not extensive, some design
changes were implemented on the basis of my work assembling the system described
above.
The blower assembly shown in Figure 3-4 has a very compact design due to the
space constraints described above in Section 3.1.2. However, the motor induces significant vibration in the heat exchanger box and filter. I suggested that a support
be built into the pocket containing the blower assembly in such a way that the heat
exchanger box was firmly supported while the motor itself was allowed to vibrate on
its castings. This was easily implemented by the use of a flexible coupling between
the blower and filter. The supports for the blower are mounted on the sides of the
pocket that the assembly fits into.
The other meaningful contribution I made in the last year was in response to an
unexpected distribution of pressure drop in the air cooling loop. The MVD's enclosure
should have atmospheric or slightly above atmospheric pressure, due to the flexibility
of the barriers between the two halves. These barriers are laminates of aluminum and
Mylar, and could easily be pulled away from each other if pressure in the MVD is
5
Vibration is only slightly less important to the MCMs themselves, since they have surfacemounted components which may loosen or detach. However, their positioning is less critical than
that of the silicon detectors.
32
O
CD
2
3
4
5
6
7
a
CD
3
0
1
1
1
1
1
1
1
002-0201-001,
ROHACELL FOAM CAGE
002-0201-003,
002-0201-004,
002-0201-005,
002-0201-006,
002-0201-007,
002-0201-007,
002-0201-014,
INNER BOT SILICON ASSY
INNER MID SILICON ASSY
INNER TOP SILICON ASSY
OUTER BOT SILICON ASSY
OUTER MID SILICON ASSY
OUTER TOP SILICON ASSY
CENTRAL PLENUM ASSY
(D
0
CAD
(D
ENAE
cLAW~IArICoI.
PAro
CeIrIU
0
C--
4.0
e+
Tve.
ORIGINAL ISSUE
TMn
11
x
LOS ALAMOS
N
0VAIN
MM
/MN
TYP.
I___.0
7//
P-25
dmcn
_ _m__ _ _.
x
O.CC
.2
O.xK-a
NRW)
D
AWdE
M..
riN.
,98
E
D
MYIA'U
CENTRAL SILICON MODULE
LOSALAMOS
NATIONAL
LABORATORY
FULLY
LOSALAMOS,
NEWMEXICO,87545
1raimRn-man=M.n
m6
7-0-97
- -
mD
MV
V IGaD
-6.0
DIMENSwIONS;
MVISIONB
PENIX
POPULATED
U.
002-0201 -016
AmIe so.
126Y267695
EU
B
NO.
1
negative. We would prefer to have these two surfaces in gentle contact, corresponding
to the condition of approximately atmospheric pressure. However, tests of the system
immediately showed that the pressure drop across the heat exchanger box was significantly greater than the drop across the filter, resulting in a very negative pressure at
the MVD itself. In response to this problem, two ball valves have been added to the
two return lines. The air flow in the two streams can now be adjusted independently,
so that the pressure in the MVD can be regulated by adjusting the resistance to the
airstream flowing through the main enclosure, while still permitting sufficient airflow
past the MCMs. These two valves are shown as V1 and V2 for one half of the MVD
in Figure 4-2.
3.2
Experimental Setup
The experimental setup described here is serving both as a final test setup for the
air cooling system itself and as a platform for testing the appropriate segment of the
ancillary control system. Unlike the prototype of the liquid system described in the
last chapter, this system conforms closely with the expected final geometry and heat
loads of the system. The mockup is doubly instrumented with temperature and flow
sensors, one set to test the air system itself and the other set being tested as part of
the ancillary tests. There is also a single humidity sensor that is being used for both
purposes.
This experimental setup utilized a full-scale mockup of the PHENIX nose cones, to
which the MVD mounts, and a prototype of one half of the MVD enclosure. A picture
of the mockup can be seen in Figure 3-6. The MVD outer and inner enclosure walls
were fabricated from 6.35 mm (0.25 in) thick Rohacell sheet and covered with 0.0005
inch thick aluminum foil that was attached using a dry adhesive.6 This aluminum
foil will act both as an RF shield for the instrumentation inside the MVD [9] and
as a barrier against moisture from the environment. The flat surface where the two
halves of the MVD would normally be in contact, forming an adiabatic plane, was
6
NT988-2 from Dielectric Polymers, Inc.
34
HEAT EXCHANGER
BLOWER
MCM COOL ING---AIR OUTLET
AIR
INLET
FILTER
HOUSING
Co*
5HP MOTOR
BLOWER DRIVE BELT HOUSING
Figure 3-4: The blower assembly, with no visible means of support.
35
MVD main enclosure (100 W)
MCM plenum (272 W)
Filter
Air/water heat exchanger
Dehumidify
0
Cool
Figure 3-5: A schematic of the air cooling system alone.
also formed of aluminum-covered 6.35 mm Rohacell to simulate the case when only
one half of the MVD is running, so that the outer enclosure of the other half presents
the main resistance to heat entering the operational half. The Rohacell enclosure
walls were attached to the metal endplates of the MVD to form a complete enclosure,
which was then mounted to the nose cones.
A schematic of the experimental apparatus used is shown in Figure 3-5. Air flow
was provided by one Sonic SAS 700 blower powered by a 6 hp motor (the motor specifications have changed since, as described in Section 3.3). The air then passed through
a custom-made heat exchanger and dehumidifier consisting of one pass through two
Lytron 6210G1SB heat exhangers and two dehumidification coils made of 3/8" copper
tubing. The Lytron heat exchangers were supplied with water at 0' C at a rate of X
gal/min by an FTS Systems water chiller. The dehumidification coils were supplied
with a water and antifreeze mixture at -10'
36
degrees C at a rate of X gal/min by
Figure 3-6: The mockup of the air system (author included for scale).
37
another FTS Systems chiller.
The chilled air was forced through a closed loop of tubing that closely resembled
the geometry of the anticipated final system. The air flowed up 10 m to the MVD
through two 2" tubes in parallel, and back down 6.3 m through two 2" tubes in
parallel that merged into one 3" tube for the last four meters of flow back to the
blower's filter.
Inside the MVD itself, the supply of cooling air splits into two streams as described
previously, and the portion directed to the areas of highest heat load splits again. The
majority of the airflow passes through the horizontal MCM plenum, where most of the
heat load is generated. A secondary stream is directed through the radial plenum in
one endplate, through the upper aluminum support member, and down through the
radial plenum in the second endplate. This air stream removes heat from the MCMs
associated with the pad detectors in the endplates. Figure 3-7 shows the prototype
half-MVD that we built during the summer of 1998, with the major components of
the air cooling passages visible.
Heat Loads
The heat loads associated with the electronics of the MVD were sup-
plied by Minco resistance heaters capable of dissipating 5 W apiece. One heater was
attached to each prototype MCM in the radial plenums, and to 68 out of 72 MCMs
in the horizontal plenum according to the expected pattern of use. Each MCM was
fabricated from aluminum sheet of the correct dimensions. Chapter 5 will also use
the properties of aluminum to model the MCMs in heat transfer analysis.
The power communications boards were fabricated from cardboard covered with
aluminum foil, and utilized 12 Minco heaters to supply the required 36.4 W of heat.
3.2.1
Sensor Placement for Cooling Tests
For the purpose of testing the performance of the air cooling system itself, we were
able to simply use sensors that had been used earlier in similar tests [2] and which
we knew to be reliable.
38
Figure 3-7: Photograph of MVD mockup. Note horizontal plenum (white, near bottom) and aluminum support member (near top).
One Sper Scientific 84003 anemometer 7 was used to monitor the air flow into the
main enclosure of the MVD, and another was used to monitor the air flow into the
MCM plenums.
Type T thermocouples, with an accuracy of
+0.50
C, were used to record the
temperatures of the air at both inlets and outlets of the MVD, as well as within the
radial MCM plenums on each end. An Omega HX49 Series humidity transducer was
used to monitor the humidity level inside the main enclosure of the MVD.
3.2.2
Sensor Placement for Ancillary Tests
The flow and temperature sensors in the flow loop are labelled in Figure 3-8 as TIF1,
T2F2, and T3F3, where T represents a temperature sensor and F represents a flow
sensor. Temperature and flow sensors are labelled together here because they share a
7
capable of measuring flows of 0 to 44.8 m/s, 0.1 m/s resolution with ±3%accuracy.
39
MVD main enclosure (100 W)
T3F3
MCM plenum (272 W)
T2F2
HI
- TIFI
Air/water heat exchanger
-
Filter
0
Dehumidify
Figure 3-8: Schematic of air cooling system, showing sensors.
circuit board, as will be discussed in Section 4.3.2. The temperature and flow sensors
are placed such that information will be provided with respect to both the airstreams
on the return side of the MVD as well as at the outlet of the heat exchanger.
There is only one humidity sensor in the loop, which due to its size and mass
could not be placed near the MVD; instead it will be mounted in the filter housing
of the blower. Section 4.2 provides more detail on the logic of sensor placement for
both cooling systems.
3.3
Ongoing Work
The design of the cooling system is still being continuously changed.
Since I left
Los Alamos at the end of January 1999, Hubert van Hecke has taken charge of the
40
testing and development of this system. 8 He found that the air blower discussed in
this chapter was adding approximately 2 kW of heat to the system and that a smaller
fan could provide the necessary airflow, so a smaller fan unit is being obtained for
the final system. This means that the drawings of the blower assembly shown here
are obsolete, but I have chosen to present the state of the system as it was when I
used it as a platform to perform my tests of the ancillary control system.
8
Further information on Hubert's work can be found at
http://p25ext.lanl.gov/phenix/mvd/cooling/cooling.html
41
Chapter 4
The Ancillary Control System
4.1
System Requirements and Overview
The ancillary control system for the cooling systems of the MVD performs two important functions; it monitors the state of both cooling systems at all times and makes
that information available to human operators, and it shuts down the operation of
either or both halves of the MVD when unacceptable operating conditions exist. Conditions are considered unacceptable for continued operation when any MCM or LDO
is above its maximum operating temperature,' when any flow of coolant is interrupted
or insufficient. All controlling software and hardware for this system resides in a VME
crate in a rack provided by PHENIX in the main experimental hall.
Early in the planning stages of the ancillary system, the design was split along
functional lines. A program running in the VME crate monitors both cooling systems
and passes the results to a database in EPICS, as well as providing a few critical pieces
of data to a computer screen in the Countinghouse where it is visible to human operators. My thesis work included a prototype version of this program, which recorded all
measurements for one half of the MVD at 30-second intervals and produced a logfile
as well as a text-only screen display.
Shutdown capability is provided independently of software, because we judged
1500 C for the LDOs and 40' C for the MCMS [4].
42
Figure 4-1: A conceptual representation of the ancillary control system.
it desirable to keep the cooling systems running when the computers go down for
reasons unrelated to the state of the MVD. A hardware solution was implemented
that simply shuts down both the electronics and the cooling systems of the MVD
when critical temperature or flow thresholds are exceeded in certain combinations
(discussed in detail in Section 4.2). This part of the system has no function other
than to turn off various components, and currently must be reset by a human operator
through software or the push of a button. As with the cooling systems, it is desirable
to be able to run one half of the MVD at a time. 2 Therefore, the hardware shutdown
system consists of two identical systems in parallel, corresponding to the two halves
of the MVD.
The two functions both rely on signals from the same sensors, so we built a distribution board to take in all signals from one half of the MVD and send the appropriate
signals to the relay board (for hardware shutdown) and to the AMU/ADC board (for
software processing). Figure 4-1 shows a conceptual drawing of this operation.
4.2
Logic of Sensor Placement
To maximize the effectiveness of the monitoring system, we wanted to place sensors
in such a way that most possible malfunctions of the system could be diagnosed by
the program. At the same time, a shortage of real estate in the VME crate made it
2
The air cooling system has one water chiller that controls humidity and is shared by both halves
of the MVD, which will not turn off unless both halves of the MVD are shut down.
43
advisable to use as few sensors as possible. In this section I will discuss placement of
all sensors associated with both the liquid and air cooling systems.
The schematic of the cooling systems, this time showing all associated sensors, is
shown below in Figure 4-2. There are very few sensors, only 19 per MVD half. System
redundancy is provided not by multiple sensors on each site, but by voting among
sensors in different parts of the flow loop; for example, two out of three temperature
sensors in one air loop would have to report unacceptably high temperatures with
respect to their part of the flow loop for the system to shut down. Critical readouts
will vary around the flow loop, but the differences can easily be cancelled out in
software; in hardware the shutdown will depend upon setpoints for each individual
sensor, as described in Section 4.3.1.
In the air cooling system, we had allocated only one temperature sensor to place
at the outlet of the heat exchanger box and two tubes to choose from,3 so we chose
to place it in the air flow leading to the plenum housing the MCMs on the basis
that that tube is slightly more critical in terms of cooling. The temperature reading
should be the same at either outlet of the heat exchanger box. The two temperature
readings in the return streams should be different, due to their different heat loads,
and so those temperatures are measured separately.
The humidity sensor is placed on the return side of the air flow loop so that a
leak in any part of the flow loop will be detected. It could not be placed in the MVD
itself because of its size and mass (see Section 4.3.1), so it was placed as near to the
inlet side of the heat exchanger as possible, in the filter housing of the blower. The
ideal situation would have been to have at least two humidity sensors in each loop,
preferably with one measuring the humidity in the MVD; however, since the humidity
will be near constant around the loop, we expect that one sensor will be adequate.
The humidity sensor is also less critical than the others because, as discussed below
in section 4.2.1, no readout from the humidity sensor can directly cause the system
3
This discrepancy arose from the order in which various parts of the system were designed; the
conceptual positioning of the temperature sensors was decided upon before the heat exchanger box
design was complete. The box has two outlets so as to reduce the resistance to air flow in the 2"
tubing leading up to the MVD.
44
T5- -
T4
a
Sim2
N IMMS
MVD ENCLOSURE
MVD ENCLOSURE
CENTRAL PLENUM
CENTRAL PLENUM
T9-
N
V!,
-TIO
V4
T3
V2
V5
T2
F2
T7
F7
FILTER
HI
-I
-S
DEHUMID
F4
12-
COOL
DEHUMID
V3
T11-
FILTER
HEAT EXCHANGER
HEAT EXCHANGER
COOL
H2
T1
V6
T14 -%
T3
<
F9
-T
5
-
_W
DRAIN
T17
RETURN
BUILDING COOLING WATER
TIO
SUPPLY
Figure 4-2: Cooling system schematic showing sensors.
45
Unacceptable
condition
Air temperature
Air flow
Liquid temperature
Liquid flow
Minimal
MVD half 1
T1T2, T1T3, T2T3
T1F2, F1F3, F2F3
T4T5
F4T4
cut sets
MVD half 2
T6T7, T6T8, T7T8
F6F7, F6F8, F7F8
T9T10
F9T9
Table 4.1: Minimal cut sets for shutdown of each half of the MVD.
to shut down. Of course, humidity is still a very important factor to monitor since a
high level of humidity will invalidate the current algorithms for vertex location.
The liquid cooling system requires the placement of only three sensors: two temperature sensors, one on either side of the heat load, and a flow sensor upstream of
the pump. The two temperature sensors allow an observer to determine whether the
expected heat transfer is taking place in the heat exchanger as well as whether the
LDOs are imposing the expected heat load upon the cooling system.
In the case of the liquid system, one temperature sensor votes with the flowmeter,
because the flowmeter is mechanical and may not be as reliable as the purely electronic
temperature sensors (see Section 4.3.1 for details). If either both temperature sensors
or one temperature sensor (T9 or T5) and the flowmeter indicate that the system is
not operating as expected, the relay board will shut off power to the appropriate half
of the MVD as well as to the cooling systems related to that half. A temperature rise
would of course follow quickly upon any blockage of the cooling flow, which is why
the flowmeter is allowed some shutdown capabilities. However, this system of sensor
voting does mean that the two liquid cooling loops rely on T5 and T9 to operate
correctly.
In reading the following sections, it may be helpful to refer to the table of minimal
cut sets for the MVD shown in Table 4.1. This is a list of the sets of sensors that
have the power to shut down the MVD if each member in the set reports unacceptable
conditions.
46
4.2.1
Fault Charts With and Without Sensor Failure
Tables 4.2 and 4.5 below show fault charts I wrote in January of 1998 and later
modified to include consequences of all given failures. These two fault charts was
taken to the PHENIX Collaboration Meeting in spring of 1998 and accepted fairly
widely as the standard when other subsystems were required to make similar charts.
The only sensors that cannot vote to shut down the system under any circumstances are the humidity sensor and the liquid level sensor, which together provide
the input by which humidity in the loop is controlled. High or fluctuating humidity
cannot cause the electronics to fail, nor can it cause structural damage to the MVD; 4
therefore, no reading from the associated sensors (resulting either from undesirable
conditions or failure of the sensors) will be considered sufficient reason to shut down
the MVD. However, as mentioned previously, the vertex finding algorithms would
have to be recalibrated in the case of a major change in humidity. This would be difficult and time-consuming, and interpretation of data would be delayed significantly
as new algorithms were developed.
Tables 4.6 and 4.7 below investigate the consequences of sensor failure within the
ancillary system as outlined above. No changes to the system were made based on
this brief analysis, but it helped us determine that we were not taking unacceptable
risk in our level of sensor redundancy.
4
Well, unless there's a flood at BNL.
47
Unified Air Cooling System
System failure
mode
What the
system sees
Automatic system
response
Consequences of failure
onsequ
Immediate shutdown of
Blower failure or
change in power
level
Fan bearing
overheats
Chiller failure or
unexpected
change in power
level
Sudden drop in
air flow
Slow rise in
temperature of
MCNIs
cooling system and
electronics if air flow drops
too much
If change is gradual,
temperature sensors will see
it and issue a
warning/shutdown
While electronics are down,
no data can be taken. The
blower will need to be
reaircaor replaced, or the
reier
repaed.
r h
Signal from the
built-in
temperature
sensor
Warning at one temperature
Shutdown of fan and
electronics of the affected
half at a higher temperature
In the case of slight
overheating, water supply to
the bearing should be
confirmed to be at a standard
level. In the case of
shutdown, no data can be
taken, and water flow will
need to be investigated. The
problem could also be in the
blower itself.
Rise in
temperature of
MCMs
Warning when temperature
spec is exceeded
Shutdown when highest
acceptable operating
temperature is reached
Temperatures requiring only
a warning will not affect data
or its acquisition. In the case
of failure and subsequent
shutdown, no data can be
taken. The chiller may have
to be accessed and repaired or
replaced.
Table 4.2: Fault chart for the air cooling system (see also next page).
48
Unified Air Cooling System (Continued)
System failure
mode
What the
Automatic system
system sees
response
to
Not applicableto
Very gradual rise
Loss of efficiency in in temperature of
MCMs and flow
heat exchanger
loop
anc llar controls hould
sure air is very clean in
the first place, filters,
and/or regular
maintenance
Leak to the outside
world
Failure of chiller
used for humidity
control or leak in
that chiller's water
lines
Warning when
temperature inside
Rise in temperature enclosure rises above
of main enclosure
spec
of MVD
Warning if MCM
Eventual rise in
temperature rises above
temperature of
spec
MCMs
Notification if humidity
Rise in humidity of rises above spec
Highly unlikely that this
flow loop
would bring about
shutdown conditions
Rise in humidity in
flow loop
Warning when humidity
spec is exceeded in either
direction
This should never cause
shutdown, since we can
recover good data if we
know how much the
.
.s
Rohacell is changing
Consequences of failure
Electronics will be operating
at temperatures higher than
initially specified. There is no
physical damage to the
cooling system. If radiation
damage to the silicon
detectors has occurred, a
worsened signal-to-noise
ratio may result from the
higher temperature.
Vertex finding algorithms
may need to be adjusted to
account for change in
dimensions of Rohacell
components. The leak should
be found and repaired at the
earliest convenience.
Vertex finding algorithms
will need to be adjusted to
account for change in
dimensions of Rohacell
components. Humidity chiller
will have to be accessed and
repaired. Note: this failure
mode affects both halves of
the MVD.
Table 4.3: Fault chart for the air cooling system (continued).
49
Unified Air Cooling System (Continued)
System failure
mode
What the system
Automatic system
sees
I
response
The liquid level
Buildup of ice, mold,
or other obstruction
on the dehumidifying
coils
Loss of "dirty" power
sensor in the heat
exchanger will signal
at a different rate,
which will be noticed
in software
Rise in humidity in
flow loop
Air cooling system
goes down: sTurn
Flowmeter shows loss
Temperature of
MCMs begins to rise
Consequences of
failure
We will try to fix the
problem by instructing
the chiller to cool the
coils further. If the
problem is
uncontrollable, the
temperature will rise
until temperature
sensors notice trouble
and turn the system off.
off all electronics
Cooling system is down
already
If the problem is severe,
the heat exchanger will
have to be accessed and
cleaned out.
No data can be taken until
power comes back up.
There is no physical
damage to cooling
systems.
No data can be taken until
Leave system running
uncontrolled (it can turn
power comes back up.
There is no physical
Loss of "clean"
Electronics are down
along with detailed
power supply
sensors, but F, T, H
itself off if limits are
damage to cooling
sensors are up
exceeded)
systems. If system shuts
down, it will need to be
restarted.
Table 4.4: Fault chart for the air cooling system (continued).
50
FC-17 liquid cooling system
System failure
mode
What the
system sees
Automatic system
response
Consequences of
failure
.1
Without electronics, no
Leak in tubing to
the outside world
(impossible for leak
to be inside MVD)
Drop in fluid
pressure (timing
depends on
location of sensor)
Shutdown of fluid cooling
system
Shutdown of all electronics
Air cooling system remains
on
data can be taken until leak
is fixed. Electrolytic fluid
li
i ie.Eetoyi
will not cause electrical
shorts, but will require
cleanup.
Pump failure or
change in pump
power level
Howmeter shows
change in flow
-Immediate shutdown of
cooling system and
electronics in case of failure
~If change is gradual,
temperature sensors will
sense trouble and issue a
warning/shutdown
Without electronics, no
data can be taken. Pump
will have to be accessed
and repaired or replaced.
when temperature
Warning
Warni
secingxeee
spec is exceeded
Shutdown when highest
acceptable operating
temperature of electronics is
reached
Temperatures requiring
only a warning will not
impact data or its
acquisition. In the case of
failure and subsequent
shutdown, no data can be
taken. The chiller may need
to be accessed and repaired
or replaced.
Chiller failure or
unexpected change
in power level
Rise in
temperature of
LDOs and in flow
loop
Loss of "dirty"
power supply
Cooling system
goes down:
Flowmeter shows
asit Turn off all electronics
Air cooling system is down
loss of flow as it
already
turns off
Temperature of
LDOs begins to
rise
Loss of "clean"
power supply
Electronics are
down, but flow,
temp sensors are
up
data can be taken until
FNo
power comes back up.
There is no physical
damage to cooling systems.
No data can be taken until
power comes back up.
Leave cooling system
genophysicas
will
(it
running uncontrolled
If cooling system shuts
turn itself off if limits are
exceeded)
down, it will need to be
restarted.
Table 4.5: Fault chart for the liquid cooling system.
51
Unified Air Cooling System Sensors
Failing
Fan
Capabilities of that sensor
Means of
diagnosing or
Consequences of
Sdouble checking
The
humidity
sensor
A flowmeter
(one of 3)
One MCM
temp sensor
fails
Liquid level
sensor
No direct double check;
there is only one
humidity sensor. The
time between signals
from the liquid level
sensoris
humidity-related and
We would have to run
system uncontrolled or
go in to fix the sensor.
High humidity could
affect the placement of
the detectors, requiring
changes in vertex finding
may help.
algorithms.
Hardware shutdown if 2 out of
3 report trouble
There are 3 flowmeters
such that F1 = F2 + F3.
If one fails, we can fill in
its measurements using
easy math. If another
also fails, we can't.
Eventual software shutdown
(algorithm
undetermined--probably shut
down in blocks of six MCMs)
Can check MCM
above/below
that one in
aboelblowtha
on in
flowstream; if there is a
discrepancy, ignore the
failing temp sensor from
then on. Also can check
signal to noise ratio for
the affected MCM.
One temp sensor doesn't
work and can't be used
for measurements or to
double check another
do
k
sensor.
Controls a valve that drains
water out of loop
If average time between
signals is recorded, can
sense deviation from
The draining of water
normal schedule. Can
from the dehumidifier
also keep draining
will be less controlled.
system at intervals in the
absence of signals from
the sensor.
Talk only--no automated
shutdown under any
circumstances
Temp
sensors in
Hardware shutdown if 2 out of
the flow loop 3 report trouble
T
Temp sensors in the
loop should have some
correlation between
readouts.
Any one failure is okay,
but system has one less
sem soels
don
sechec
Table 4.6: Fault chart for the air cooling system, allowing sensor failure.
52
FC-75 liquid cooling system sensors
Failing sensor
of
ICapabilities
that sensor
Means of diagnosing Consequences of failure
or double checking
Hardware shutdown
with flow sensor (F7
and T8, F8 and T1O)
Temp sensors on
motherboard, and
Temp sensor in
requiring both to show
flow loop (one of
trouble before shutdown.
2)
Hardware shutdown if Can still control with
both temp sensors
only one working.
report trouble
Flowmeter
Motherboard
(one of 3)
Hardware shutdown
with temp sensor (
and T8, F8 and T10)
Software shutdown
undetermined)
No direct backup; only
one flowmeter. Temp
sensors double check to
some degree.
As with MCMs, make
sure they agree
n
ochecking.
Less redundancy in liquid
system control; if T8 or T1O
goes town, the flowmeter
will be able to act alone.
Pump would have to run
uncontrolled, and system
could not directly detect
leaks in the liquid loop
As with MCMs, there's one
fewer temp sensor for
measurement and double
Table 4.7: Fault chart for the liquid cooling system, allowing sensor failure.
53
4.3
4.3.1
The Test Setup
Selection and Installation of Sensors
This section discusses the characteristics of the sensors chosen for the ancillary system.
These sensors were chosen primarily by Jan Boissevain based on initial research by
John Bernardin and myself. All of them were required to give a voltage output
between 0 and 5 V so that they could be read by the AMU/ADC board and thus by
the software; some of them also had to directly activate TTL logic, which requires
approximately the same voltage range. With the exception of the humidity sensor,
they were also chosen for small physical size so that they could be inserted into the
air flow without disrupting it.
Temperature
The temperature sensors used for both the liquid and air cooling loops are ADT14s
from Analog Devices, Inc. Each is equipped with four digital outputs, corresponding
to user-defined trip points, and one analog readout. They are ideal for the ancillary
system because the four user-defined setpoints can trigger TTL logic chips directly;
therefore, a setpoint set to the highest acceptable temperature can be connected
directly to the relay board. At the same time the analog readout can be recorded in
software and displayed in the Countinghouse.
The ADT14 is packaged as a standard DIP chip. In standard usage, it is inserted
into an airstream or mounted in such a way that its top surface is exposed to the
temperature to be measured. A pinout of the chip 5 is shown below in figure 4-3. The
pin labeled "hysteresis" (pin 11) sets the hysteresis for all four user-defined trip points
simultaneously when it is connected to various voltages. For the purposes of the tests
described in this thesis, the hysteresis was set at 1.50C by leaving the hysteresis pin
open.
The four outputs in the corners correspond to the four user-defined setpoints,
5Taken from the technical note
from Analog Devices.
54
which are simply voltage levels corresponding to the desired temperature trip points
according to the formula
Vset
= (Tset + 273.15)(.005mV/ 0 K).
(4.1)
The voltages at the setpoints are compared to a voltage proportional to absolute
temperature (VPTAT) generated inside the chip, and each open-collector output goes
to its open state when measured temperatures exceed the corresponding setpoint.
Output 4
Output 1
Setpoint 1
ADT14
Setpoint 4
N/C
Vref (2.5 V)
N/C
N/C
Power (5V)
Ground
VPTAT
Hysteresis
Setpoint 2
Setpoint 3
Output 3
Output 2
Figure 4-3: Pinout of the ADT14 (DIP package).
Installation of ADT14s
These sensors require a small circuit board in their vicin-
ity to allow ajustment of their setpoints, as well as the conversion of their opencollector outputs to more robust voltage signals.
To minimize the risk of signal
corruption between the sensor and its circuit board, the board is placed as near to
the sensor as possible, on the outside of the foam insulation surrounding the tubing
of the flow loop in question.
A schematic of the board used for the temperature sensors of the liquid system,
which accomodates the pins of a single ADT14, is shown below in figure 4-4. Identical
circuitry is used for the temperature sensors in the air cooling loop, with the addition
of some components corresponding to the air flow sensors.
55
0
ADT14 (T)
Vref (2.5 V)
C)
power
setpoint I
oututV
setpolflt 2
output 2
setpoint 3
output_ 31
setpoint 4
output 4
__________________
__
__
groundVPTAT
Figure 4-4: Circuit board for one ADT14 temperature sensor.
The ADT14 generates a reference voltage (Vef) of 2.5 V, from which a voltage
divider ladder to ground can be used to set the four temperature setpoints. The total
current flowing through such a ladder must be within the range 50p-A < I < 200pA
to ensure proper operation of the chip. I chose to use a parallel array of potentiometers in place of the recommended voltage dividers. Potentiometers corresponding to
each setpoint allow the setpoints to be adjusted at any time, while keeping the total
current constant and therefore within the desired range. The independence of voltage setpoints and current proved indispensable when testing the sensors, and Analog
Devices technical support is considering including this method of installation in its
next version of the ADT14 data sheet.
In the liquid cooling system, these sensors are affixed with thermal epoxy to short
sections of copper tubing in the flow loop. About an inch of the copper tubing is
flattened to assure good contact with the surface. The circuit board is connected to
the sensor by a flexible ribbon, to assure that any jarring of the circuit board will not
56
Figure 4-5: One ADT14 temperature sensor attached to copper tubing.
57
Power
Vref
TMP12
Setpoint 1
Over
Setpoint 2
Under
Ground
FHeater
Figure 4-6: Pinout for the TMP12 air flow sensor (DIP package).
cause the sensor to break free of the copper tubing. The picture in Figure 4-5 shows
this method of attachment.
I will discuss the insertion of ADT14s into the air cooling loop in the next section,
as they are mounted together with the air flow sensors.
Air flow
The air flow sensors chosen for use in the air cooling system are TMP12s from Analog
Devices, Inc. These sensors resemble the ADT14s closely in their method of operation; they come in an 8-pin DIP package and are designed to be placed directly in
the airflow being measured. An internal heater raises the temperature of the chip
by about 22' in still air, and the chip then simply measures its temperature and
compares it to each of two user-defined setpoints that are set in the same way as the
ADT14 setpoints. The outputs are open-collector outputs corresponding to "over"
and "under" conditions with respect to expected temperature; both setpoints will be
closed when the temperature is within the expected range. Unlike the ADT14s, the
TMP12s do not have an analog readout of any kind; however, the blowers in the air
cooling system blow at a steady rate and cannot be adjusted. Therefore, the air flow
sensors simply test that flow is present and adequate.
A pinout of the TMP12 is
shown below in Figure 4-6.
These sensors, like the ADT14s, require a small circuit board in their vicinity.
Since these are only used in the air flow loop, and only in the same places as the air
temperature is measured, I made a combined circuit board that contains the compo-
58
nents required for one ADT14 and one TMP12, a picture of which is shown below in
figure 4-7. This arrangement lowers the number of connector pins and ribbons needed
to service both sensors. These circuit boards also contain projections containing the
chips themselves, so that a combined board is more resistant to externally applied
torque than either board would be alone.
Note that the two projections are rather far apart; this is to provide some thermal
isolation between the heater in the TMP12 and the temperature sensor. These boards
also must be installed so that the air flow encounters the temperature sensor before
the air flow sensor. This prevents the ADT14 from encountering air that has been
warmed by the heater in the TMP12, thus generating an artificially high temperature
reading.
Figure 4-7: Photograph of a sensor insertion board for ADT14 and TMP12.
59
Schematic of sensor insertion board
w . oM
.i
-
.i
.
Figure 4-8: Schematic of a sensor insertion board for ADT14 and TMP12.
60
Humidity and Liquid Level
The Omega HX-49-D-V was selected as the humidity sensor to be used for the air
cooling system; a picture is shown below in Figure 4-9. It provides one analog output
that varies from 0 to 5 V in direct proportion to relative humidity; since we wish to
control for specific humidity, the conversion must be made in software.
The humidity sensor will be mounted in one end of the blower's filter housing,
which is shown in Figure 3-4 in Section 3.1.3; for the purpose of the testing done
for this thesis, the sensor was mounted in the side of the prototype MVD itself for
accuracy in monitoring and because the filter housing had not yet been machined to
accomodate the sensor.
Figure 4-9: The Omega HX-49-D-V humidity sensor, showing intended method of
mounting to a surface.
61
Liquid Level Sensor
The liquid level sensor is also closely related to humidity
issues; this sensor resides in the bottom of the drip pan in the heat exchanger box
and tells the software when to drain the drip pan. This will be done by sending a
signal to Valve 3 or Valve 6 in Figure 4-2. The sensor chosen is an Omega LV171
because it was small and robust.
This sensor operates by means of light refraction, as shown in Figure 4-10; a
prism serves to reflect light internally only as long as the sensor is out of liquid, and
an internal solid-state light sensor registers the presence of the light. When the sensor
is immersed in liquid, the signal is refracted out into the liquid.
Photosensitive
receptor
Light source-\
I I
Figure 4-10: An illustration of the operation of the liquid level sensor.
Liquid flow
A drawing of the Omega FPR121 flowmeter can be seen in Figure 4-11. This flowmeter is rated for the appropriate range of flows and is relatively small; it provides a
single DC voltage output that is high or low depending on the relation of the flow
to a user-defined setpoint. This setpoint is set manually by setting the flow to be
measured to the desired critical level, then adjusting a built-in potentiometer until an
62
Figure 4-11: An Omega liquid flow sensor very similar to the one we used.
indicator LED on the flowmeter changes state. The flowmeter has two output wires
corresponding to the two correlations of voltage to flow; we chose to use an output
such that high voltage indicated acceptable flow, as this would be in line with the
outputs of the setpoints on the TMP12s and ADT14s.
The placement of this flowmeter is not as sensitive as the placement of the temperature sensors due to the incompressibility of water, but it is significantly larger
than the temperature sensors. It is therefore placed close to the pump, in an area
where excess mass is noncritical. A voltage divider is used to reduce the output signal
from 12 V to 5 V. A small circuit board houses the voltage divider and a connector
for a 3-pin ribbon leading to the distribution board.
4.3.2
Insertion of Sensors into Cooling Systems
The next step in assembling a complete ancillary system was to insert the sensors
in the cooling systems in a realistic way and assure ourselves that they worked as
expected. This section describes the process of installation and testing of the sensors only; connections to the rest of the hardware and software will be described in
63
Figure 4-12: A photograph of the liquid system used for testing the ancillary system.
Sections 4.4.1 and 4.4.2 respectively.
Liquid System
The design of the liquid cooling system was completed in 1997, and no further testing
of the basic design is being performed;' therefore, for the purposes of testing the
prototype ancillary system, we did not find it necessary to build a realistic model of
the liquid cooling system. Instead, we built the scaled-down prototype pictured below
in Figure 4-12, as described in Section 2.2. It utilizes the pump we expect to use in
the final system, which must be turned off by the ancillary system as described earlier.
The two temperature sensors and one flowmeter described above are employed as we
expect them to be in the final system, and cooling is supplied to loop via a Lytron
6210 heat exchanger as described in the final design.
To test each sensor, we first checked the analog temperature output (VPTAT) with
a voltmeter to see that it agreed with a mercury thermometer at room temperature.
We then adjusted each setpoint until the setpoint voltage had passed the VPTAT,
and saw that the corresponding outputs changed state appropriately.
6
It is currently being tested in conjunction with the air cooling system and the ancillary system, however, to be sure that all interactions between the systems function in accordance with
expectations.
64
We then connected the sensors to the distribution board and measured all outputs
again at the input and output ends of the distribution board, at the same time
connecting the distribution board to the AMU/ADC board and attempting to read
the sensor outputs through the monitoring program 7 . At this point we discovered
several shorts and false connections in the distribution board, some of which exposed
an output from an ADT14 to 5V and caused the corresponding setpoint to stop
functioning. The other three setpoints and outputs on the chip continued to work
normally when one was blown out in this way.
Air System
We inserted three of the combined ADT14/TMP12 circuit boards into the airstream
using the sensor insertion boards shown in Figures 4-13 and 4-14, taking care to
always place the ADT14 upstream of the TMP12 so that air heated by the TMP12's
internal heater would not result in false temperature readings. A representation of
the method of insertion is shown in Figure 4-15.
Before insertion we tested the ADT14s in the same way as those in the liquid
system, but we avoided damaging them during their connection to the distribution
board. We did find anomalies in T2 that we were unable to fix, but this only seemed
to affect the analog temperature readout; it did not affect the four setpoints or the
tests we had to run with the relay board and the software.
The TMP12s differ from the ADT14s in having an internal heater, so we first
verified that the chips were warm to the touch as we expected. We then adjusted the
setpoints individually until we could see the outputs indicating a change, as we had
done for the ADT14s.
7
Development of the monitoring program proceeded roughly in parallel with the installation of
sensors into both systems.
65
Figure 4-13: Photograph of the sensor insertion board.
4.4
Implementation of Controls and Monitoring
In this section I discuss the details of the proof-of-concept models we developed for
the ancillary system. These include the hardware used for shutdown of the MVD's
cooling system and the software used to monitor signals coming from the sensors. I
also describe in detail the methods we used to test both functions.
4.4.1
Hardware
The objective of the hardware subsystem is to be able to shut down the electronics
of the MVD and all components of the cooling system in the case of unacceptable
conditions arising in the absence of monitoring software. We developed this subsystem
so that a computer crash would not necessarily require the shutdown of the cooling
systems; rather, the cooling systems will be allowed to run unattended under the
limited control of the water chillers themselves. If something goes wrong, it will simply
shut down both the cooling system and its associated heat loads. All components of
this subsystem reside in the single VME crate we will have in the experimental hall.
66
a 0
Schematic of sensor insertion board
Figure 4-14: Schematic of the sensor insertion board.
67
Direction
of air flow
ADT14
LII
LIZ
LIZ
[L
TMP12
r
Figure 4-15: The sensor insertion board in 2" tubing (not to scale).
To accomplish this goal, trouble signals from the sensors must successfully pass
from the sensors through the distribution board to the relay board, which then sends
out an irrevocable shutdown command to the various components of the cooling
systems. Lastly, power to these components had to switch in response to commands
generated by TTL logic chips. This section describes how we met these challenges.
The Distribution Board
The distribution board is a simple board responsible for sending all sensor signals
where they need to go-the relay board, the AMU/ADC board, or both in a few
cases.
The distribution board described in this section was built by Hubert van
Hecke and designed and tested by both of us. It is capable of handling all sensor
signals corresponding to one half of the MVD, 8 and resides in the VME crate.
The following table lists the ribbon cables coming from the sensors. We used 10 m
of ribbon to connect each sensor to the distribution board, because this is the expected
8
With the exception of the liquid level sensor, which we didn't include in these experiments
because it wasn't considered critical to the concepts being tested. We plan to bundle it onto a single
ribbon with the humidity sensor.
68
maximum ribbon length for the sensors. Each of these ribbons was connected to a
10-pin connector at each end.
sensorsenso
air flow: tmpl2
air temp: adt14
humidity:
liquid temp: adt14
liquid flow:
leads ribbon
total
-- outputs
output
quantity
analog
quatitydigital
3
3
1
2
2
2
4
4
1
1
1
1
1
6
15
1
10
4
4
7
3
7
4?
9*
3
7
4
36 readout channels
total field sensors: 10
**
* When combining tmpl2 and adt14, power and ground are shared.
** We will only send 32 of these to the ADC module.
Table 4.8: A listing of connector pins needed for the sensors.
Note that one signal from the ADT14s is not being used in the cases where they are
bundled on the same ribbon with a TMP12, in the interest of using 10-pin ribbons for
all sensors. This signal, the output corresponding to the lowest of the four setpoints,
does not have any hardware shutdown capacity and in fact has no real value as a
warning indicator because we expect overcooling of the MVD to be a very rare failure
mode. The ADT14's four setpoints correspond to two conditions above the expected
operating conditions, referred to hereafter as the high and high-high setpoints, and
two conditions below the expected operating conditions. These setpoints, the low
and the low-low, serve the same basic function of telling operators that the MVD is
colder than expected, so we decided that one such warning would be enough.
The two setpoints above the expected operating conditions do serve different functions. A "high" signal from any ADT14 is considered a warning to human operators,
whereas all "high-high" signals are routed to the relay board and have the power to
shut down the system without operator intervention. This is typical of the operation
of the distribution board; all signals are reordered and routed to the AMU/ADC
board for reading by the software and human operators, and the most critical of the
69
Figure 4-16: A photograph of the distribution board.
signals are split and also given to the relay board. There are no signals that are seen
by the relay board but not by the ADC board.
A schematic and a picture of the distribution board are shown below. Note the use
of "condo connectors", which can be stacked on the circuit board, and the mezzanine
board used to make the distribution board doubly thick. Space in the VME crate
is limited enough that condo connectors were the only way all components could fit
into the allotted space.
The Relay Board
The relay board is connected to the distribution board by means of a single 18-pin
ribbon carrying the critical readouts from all sensors from one half of the MVD. The
final version of the relay board will have two input ribbons corresponding to the two
halves of the MVD. A picture of the current form of the relay board is shown below in
figure 4-19. I built this on a blank VME board using wirewrap and HTC logic chips.
The geometry of the logic maps almost directly from the schematic shown above. I
70
power
2 ground
3 threshold 1
4 threshold 2
5 threshold 3
6 threshold 4
7 analog out
1
ADT14 (T)
TMP12 (F)
8 NC
6U VME
.?
GEL
9 xxxxx
10 xxxxx
x3
1 power
2 ground
humidity
x1
D
Fl-
:' 3analog out
1 power
ADT14 (T)
x2
7
4L
2 ground
3 threshold 1
4 threshold 2
5 threshold 3
6 threshold 4
7 analog out
n-- -
-
--
HJ[]
1 power
2 ground
3 threshold
liquid flow
x2
relay
board
custom
ADC
board
D
'4 analog out
D
D
D
channel 1-18
K
channel 1-16
channel 17-32
K!
'CE
C1
0
Figure 4-17: A schematic of the distribution board.
71
+5V
+12V
gnd
Figure 4-18: Connectors on the front of the distribution board.
72
Figure 4-19: A photograph of the relay board as it was being tested.
also placed .068pF capacitors over each chip and a 33 mF capacitor near the power
source to protect the chips from noise.
The logic of the relay board is a simple realization of the concepts outlined above
in Section 4.2 and Table 4.1, in which the minimal cut sets of the cooling systems were
defined and discussed. A schematic of the relay board is shown below in Figure 4-20.
In interpreting the figure, note that a high signal from the sensors indicates normal
operation and a low signal indicates unacceptable conditions. However, in the rest of
the circuitry a high signal indicates trouble.
The OR gates at the output of the relay board take input from the logic circuits
of the relay board and from the software. They serve two functions. The first is to
provide a way for the software to shut down each component of the cooling system,
either automatically 9 or by command of a human operator. The second function
9
At the moment there is no situation that would cause the software to shut down the systems
autonomously, but there has been discussion of software that could recognize situations such as a
trend toward overheating. In this case, the software might act to shut down the cooling systems
before the relay board sees the problem.
73
1/O in:
42-37
36-01
-mbl-1-1
-mb 1-1-2
mbl-2-1
mbl-2-2
(2 out of 3 agree)
T1
T4
<C' T2
CD T3
mbl-3-1
mb2 -3-2
-mbl-4-1
-
mb2 -4-2 (spare)
--
mb2-1 -1
mb2-1-2
mb2-2-1
mb2-2-2
mb2-3-1
F mb2-3-2
mb-120
mb2-4-1
mb2-4-2 (spare)
T4
Cn TCO T6
5T
-M-T9
cc
CD
T8
T9
F4
CW F7
mb3-1 -1
I
CD
)F
.-
M.
C
:
-mb3-3-2
mb3-4-1
mb3-4-2 (spare)
-
3
CD F1
=3 F2
ws hmb4-1
eastF3hf
s
0
CD
mb2-1-2
mb3-2-1
-mb3-2-2
mb3-3-13
(D T10
0
0
-1
-2
mb4-2-1
mb4-2-2
mb4-3-1
mb4-3-2
mb2Tmonito
shtdw
F5
-mb4-1
F6
shutdwn
east alf
shutdwn
- mb4-4-1
- mb4-4-2 (spare)
mbl monitor
-mb2 monitor
-mb3 monitor
-mb4 monitor
___________________mbl
mb2
mb3
Legend:
'and' gate
ED
Dor'
mb4
mb monitor
gate
interf. crate
ED'
'nand' gate
chiller 1
1"
'nor' gate
chiller 3
chiller 2
- blower 1
blower 2
Figure 4-20: A schematic of the relay board.
74
to power
supplies
via Rack
Monitor
is to ensure that every individual shutdown signal is propagated by an independent
transistor (one in each OR gate). These shutdown signals and the relays they drive
will be described in detail in Section 4.4.1.
The latching circuit Early in the development of the relay board, we realized
that the board's direct connection with the power supplies of the cooling system
components could cause problems if the relay board was capable of switching the
power both off and on. For example, if the system overheated, the relay board would
cut power to the cooling system only until 2 of the 3 temperature sensors reported
acceptable temperatures (this would be possible under some circumstances if the
environmental hall was cold). The system would then run until it overheated again,
and its power would continue to cycle until human operators intervened.
To avoid this problem, I decided to implement a latching circuit that could pass
a rising edge but not a falling edge. In this way the relay board becomes capable
of turning the cooling systems off, but never on. A reset signal from software or a
human operator would then restore the state of the latching circuit to normalcy after
the state of the system is acceptable again.10
We found a logic chip that seemed to have the required attributes,11 namely an
output that does not always reflect the input and a reset function. Its pinout and
associated truth table are shown in Figure 4-21.
The logic of the relay board provides only one signal I designed a latching circuit
having two separate delays as shown below in Figure 4-22. The first delay, composed
simply of two logic inverters, ensures that any change in the state of the input reaches
the data pin before anything else. The second delay is used along with an AND gate1 2
to generate a pulse when a rising edge comes down the data line (no pulse will be
generated in response to a falling edge). This delayed pulse then enters the clock line
10 This does raise the question of what to do when the system is initially being started, when
conditions will temporarily be "unacceptable" as the cooling loops cool down from room temperature
to operating temperature. I discuss this situation in the next section.
"Recommended to us by Sangkoo Hahn, lead electrical engineer for the MVD.
12
The capacitors shown have no logical function, serving only to generate a longer delay due to
the time it takes the transistors in the NOT gates to charge them up; the original design did not call
for the capacitors, but did not generate a pulse long enough for the AND gate to recognize reliably.
75
Inputs
Outputs
Set
Reset
Clock
Data
Q
Q
Reset 2
L
H
X
X
H
L
Clock 1
Data 2
H
L
X
X
L
H
Set 1
Clock 2
L
L
X
X
H*
H*
Q1
Set2
H
H
*
H
H
L
Q1
Q2
H
H
*
L
L
H
Ground
Q2
H
H
L
X
Qo
Qo
Reset 1
Vcc
HCT74
Data 1
* Nonstable configuration; that is, it will not persist when
Set or Reset returns to its inactive (high) level.
Figure 4-21: Pinout and truth table for the latch (HCT74) chip.
of the chip.
The pulse in turn performs two functions; its rising edge causes the signal on the
data line to appear on the output line
Q, and
its subsequent low reading sets the
output to whatever it was when the clock line was high. The duration of the pulse
is about 150 ns, and we expect the signal on the data line to be changing with a
much slower frequency because it depends on the state of the cooling systems. When
there is a rising edge on the data line, therefore, the output line will also go high and
remain high even if the data line subsequently goes down. The relay board is thus
capable of shutting down the cooling systems but not restoring them to an operative
state.
Reset vs. Propagate
Providing an inverted pulse to the reset line causes the
output line to be set low, restoring the relay board to its original state as long as
conditions in the cooling system are in fact within normal operating range.
The
set and reset lines on the chip are meant to remain high under normal operating
conditions; in this case we will tie the set line high and control the reset line via
software. For the purposes of the tests performed this year, we simply arranged a
76
Latching circuit on relay board
Set-Reset Flip-Flop
shutdown signal
from hardware
data
cpF
2022
reset signal
from software
rret
Q (output)
Figure 4-22: A schematic of the latching circuit.
push button that would pulse the line appropriately.
However, during the building of the relay board we discovered that a failure mode
exists in which the reset line is pulsed when the cooling systems are not in an acceptable state. In this case the relay board sees the unacceptable state but is not given
the edge it needs to shut down the system. It then allows the cooling systems to
restart in spite of the unacceptable state, and will not shut down the systems until
their state has cycled from unacceptable to acceptable to unacceptable. This cycle is
very unlikely to occur given that cooling system failure is the most probably cause
of an unacceptable state; the electronic components of the MVD could then be in
danger of overheating as they continue to operate without sufficent cooling.
We worked around this problem by deciding that the software should not pulse the
reset line but instead provide a (positive) pulse to the clock. This action serves the
same purpose as before, in that it propagates the signal on the data line to the output
line
Q and
therefore resets the system when conditions are acceptable. However, in
this case the system will not be allowed to restart if conditions are unacceptable.1 3
Figure 4-23 shows schematics of the experimental setup we used to implement the
propagate and reset functions.
Note that the propagate function also provides a pulse to the output of the AND
3
This can be overridden by using the original "reset" function, if it is ever necessary to run the
system when conditions are considered unacceptable; one example of this might be when we are first
starting the system and it has not yet cooled down to operating temperatures.
1
77
Reset (produces inverted pulse on reset line)
10 K
+5V
Reset
Propagate
(produces pulse on clock line)
Switch
+5V
Clock
Figure 4-23: Reset as opposed to propagate.
gate of the latching circuit. It was determined by experiment that this does not seem
to hurt the chip.
Testing of the Relay Board
The relay board was tested extensively at each stage
of construction, beginning when only the logic was in place. To test the logic of the
relay board, I contructed an array of 18 DIP switches, pictured in Figure 4-24, in such
a way that they could be switched from 0 to 5 V. These simulated the signals that
would later come from sensors. I connected them to the relay board with a 36-pin
ribbon, alternating signals with grounds, and tested that appropriate combinations
of low signals produced a high signal on the output line.
Relay boxes
The relay boxes performed the final step of using TTL signals from the relay board
to switch the power to the components of the cooling systems.
requiring such switching were:
78
The components
Figure 4-24: Photograph of dip switches used for testing relay board.
" The liquid pump, running on 110 V
* The air blower, running on 3-phase 240 V, and
" The water chillers, running on 220 V.
We found relays from Newark 14 that were capable of using a TTL signal to switch
voltages from 24 V to 240V. Larry Marek then fabricated three relay boxes that the
water chillers and liquid pump could plug into, such that a Newark relay in the box
was capable of cutting power to the plug. These boxes were mounted near the water
chillers and the liquid pump, and we tested their ability to switch power by providing
the boxes alternately with 0 and 5 V and seeing that the components turned on and
off.
A photograph of these boxes is shown in Figure 4-25.
"Opto 22, Model 240D45-17.
79
Figure 4-25: Photograph of relay boxes, showing one open and one closed.
Testing of the assembled hardware
Having first tested each stage of the hardware alone or in short chains, we finally
performed a chain test in which input to the sensors resulted in the shutdown of
both water chillers and the liquid pump. We repeated such testing several times,
generally causing unacceptable conditions by adjusting the setpoints of the sensors
rather than by actually adjusting the conditions seen by the sensors. In the course
of this testing, we found that the sensors themselves seemed to be the least reliable
part of the process; for example, we found a problem in which some temperature
sensors required a ribbon cable length of 5 m or less in order to reliably get signals
to the distribution board, when identical sensors worked well with 10 m of ribbon.
However, the distribution board and relay board worked very reliably, as did the
monitoring program described Section 4.4.2 when we ran it in parallel with the chain
test described here. Initial testing seems to support the concepts explored in this
section.
80
4.4.2
The Monitoring Program
The monitoring program has two main functions; the first is to continuously monitor
the performance of the cooling systems of the MVD, displaying a few critical values to
human operators on a constant basis and providing a warning when certain thresholds
are exceeded (such as the "high" reading on any ADT14). It also makes a logfile of
the state of the system at some constant time interval, and gives that data to an
expandable database in EPICS.
The program runs on a CPU in the VME crate, and requires a cross-compiler. The
language used is C, but only integers are allowed in operations. The program reads
voltages from the AMU/ADC board, which acts as a voltmeter capable of reading 32
channels. It also serves to protect the CPU from voltage spikes on the channels.
My work on the program
I modified a currently existing program that read out the voltages on all the channels
of the AMU/ADC board and displayed those values on the screen. After determining
the mapping of the AMU/ADC output, I converted the appropriate voltage readings from AMU units" to meaningful values and assigned them to variable names
corresponding to the sensors. The voltage readings were converted either to a binary reading (1 or 0) based on whether they were over or under 3 V. The analog
temperature readings were converted to temperature readings based on Equation 4.1.
The program as written was capable of monitoring both halves of the MVD at once;
we tested this capability by simply moving the ribbon connectors to inputs on the
distribution board reserved for the second half of the MVD and checking that the
system was interpreting those values correctly. In one case, this method of testing
also helped us determine that an ADC channel was inoperative and not the sensor to
which it corresponded.
The program checked data from the sensors either when it was explicitly told to
151000 times the measured voltage, for reasons having to do with the cross-compiler. It could only
understand integers, so multiplying the voltages by 1000 allowed programmers to work with voltage
increments of .001 V.
81
Sensor
A
i
r
L
i
q
u
24.32 C
| T=
I T2 = 25.43 C
I T3 = 28.39 C
|F1
|F2
|F3
I H1 = 10.00 RH
Low
High
d
d
d
d
d
d
d
d
d
d
d
d
d
d
d
d
d
d
d
d
d
d
High-high
I
| T4 = 30.58 C
I T5 = 27.87 C
|F4
i|
d|
Table 4.9: Sample output of current program for one half of the MVD.
do so from its prompt or automatically every few seconds. The program in Appendix
A is set up so that any command is executed when it is typed at the prompt or
when an incrementing variable cnt is at a certain value or values. For example, the
program will execute the function "display" every time the count is divisible by 10,
and stop displaying when the count goes above 500. To run the program this way, it
was necessary to comment out the lines that display the prompt and wait for input,
as well as the line showing an error message when no input was given.
A later version of the program simply had a "loop" function that took number
of loops as its argument, making it easy to simply make the program run for a few
minutes while we adjusted sensors or operating conditions of the cooling systems.
Testing of Software
Testing of the software proceeded in parallel with the testing of the distribution
board. We tested it by simply running the program while we manipulated the sensors,
and looked for such things as changing setpoints and reasonable analog temperature
readings. The program proved itself to be reliable very early in the overall testing
82
process.
Continuing work
Plans are underway to continue to improve and modify the monitoring software.
PHENIX has decided on a graphical interface package to be used with EPICS, and a
user interface has to be developed.
Other more technical areas of potential improvement include changing the logfile
to a format EPICS can recognize, and possibly modifying the program to recognize
worsening trends in the system so that failures can be recognized before system conditions become unacceptable.
4.5
Conclusions
The ancillary control system as currently designed is capable of performing the tasks
it was designed to do, namely monitoring the cooling systems of the MVD and shutting them down without dependence on software when conditions spiral out of control.
While more work remains to be done, especially in the development of the user interface, the concepts have been proven applicable to the problem at hand.
83
Chapter 5
Closed Loop Control
The present design of the air cooling system incorporates closed-loop control only in
that the water chillers themselves use PID control to help them maintain a constant
output temperature in the fluid they cool. The design of the system is basically
open loop in that a human operator is required to fine tune the system settings.
This chapter briefly explores the consequences of implementing closed-loop control of
MCM temperatures.
The primary advantages of closed-loop control are that the system can automatically compensate for disturbances without human intervention, and generally
responds more quickly to user input. While speed is not anticipated to be an important consideration, disturbance rejection may prove to be extremely important if
conditions in the experimental hall are found to change frequently, or if the Countinghouse cannot be staffed on a constant basis.
5.1
Modelling the Air Cooling System
The air cooling system contains several components for which temperature is critical:
the MCMs in the plenum and in the endplates, the power/communications boards,
and the air inside the main enclosure of the MVD. This analysis will focus on the
MCMs in the horizontal plenum alone, as a first step toward understanding the entire
system. Figure 5-1 shows some aspects of the system relevant to the control system
84
capacitance)T
Air takes
0.15 seconds
Temperature
to reach
sensor reports
|
MCMs
actual MCM temp
to chillers without
delay
|
|
Water chillers
and heat
exchangers
- - ------------
\ -- - -- -- -- -- -- -- -- -
Figure 5-1: Diagram of the air cooling system for control analysis.
analysis in this chapter.
The physical properties of MCMs are approximated by those of aluminum, and
these numbers can be found in Appendix B (Table B.1). For simplicity's sake, I have
also assumed that the MCMs are at an equal and uniform temperature, and can be
modelled as a single lumped capacitance. 1
The system also contains a pure time delay of 0.15 s caused by the time it takes air
to travel from the heat exchangers to the MCMs. 2 This time delay has an important
effect on the control of the system, serving to limit the attainable bandwidth to
approximately 10 Hz. While there is also a similar delay on the return side, this
is ignored because the analysis assumes instantaneous feedback from a temperature
sensor at the MCMs.
1The Biot number for one MCM is
very low, about 0.0004, and justifies this assumption; however,
in the actual system there is significant variance in temperature between MCMs according to their
position along the primary line of air flow. This assumption is made for the current first-order
analysis only.
2
We expect a maximum airflow of about 0.015 m 3/s, which flows through 2" I.D. tubing at
approximately 20 m/s. This air will therefore take about 0.15 s to traverse the 3 meters of tubing
between the heat exchangers and the MVD.
85
Lastly, the heat load of the air returning from the MCMs is ignored, as we assume
that we can directly control the temperature of the cooling air. This assumption may
not be entirely realistic due to limitations on the control of the temperature of the
cooling air itself. The heat exchangers currently in use can remove about 1550 W from
the air according to recent work by Hubert van Hecke. However, for the purposes of
this analysis I assume that the temperature of the cooling air can be controlled with
arbitrary speed and without regard to the heat in the air return line.
A listing of variables used in this chapter follows, for use in later subsections.
Values corresponding to some of these variables may be found in Table B.1.
Symbol
Definition
V
Total volume of MCMs (m 3 )
As
Total surface area of MCMs (m2 )
Total heat dissipation in MCMs (W)
Heat generation by volume (W/m 3 )
Heat flux through surface (W/m 2 )
Coefficient of heat transfer (W/m 2 o K)
Q
q9
q"
h
p
c,
k
T
T
TOO
E
Density (kg/m 3 )
0
Heat capacity (J/kg K)
Thermal conductivity (W/m 0 K)
Temperature of MCMs ('K)
Offset temperature of MCMs (OK)
Temperature of cooling air (OK)
Normalized temperature difference (OK)
Table 5.1: Table of variables utilized in Chapter 5.
5.1.1
Derivation of State Equation
To derive the system equation for the temperature of the MCMs, I start with a basic
energy balance; energy generated by the material minus energy removed by convection
must equal stored energy.
Egen
-
out
Estored
(5.1)
The proper form of this equation specifies the specific mode of energy loss, which
in this case is forced convection, so that
86
4gV - hAd(T - T.) = pVcp
(5.2)
dt
where all variables are defined in Table 5.1. Now, as in the standard derivation
for the lumped capacitance response [13, page 213], we introduce a new variable
such that
E
= T - T,
and recognize that
d
is equal to
d.
E
Substituting this into
the above equation and rearranging, we obtain the following:
de
+
dt
hAs 0
pVcp
8 =)
4g
.
PCp
(5.3)
The solution to this equation takes the form of an exponential convergence to a
constant final temperature. The offset between this final temperature and the temperature of the cooling air is the result of the heat generated within the MCMs, and
here it is assumed that process properties affecting the offset do not vary significantly
over the expected range of operating temperatures. In terms of E, the solution is of
the form
O(t)
-
hAs
+ Ce A.
(5.4)
Here C is a constant of integration, which in any particular solution will be the
value of the step change in T,.
For example, let us examine a step change in the
temperature of the cooling air between two temperatures T and T2 . For clarity, I
will redefine T, as
To = T1 + (T2 - T1 )us(t)
(5.5)
where us (t) is a unit step change in temperature. The solution to Equation 5.3
now will be the sum of its particular and homogenous solutions, which I denote as
T, and Th respectively. For the case when t < 0, there is only a particular solution
showing the temperature of the MCMs to be somewhat higher than the cooling air,
as we expect. Since
=-0 and T,
=
T1 , we obtain the following:
87
T - Too = "
hAs
T(t) = T
42 +T1.
hAs
-
(5.6)
(5.7)
For the case when t > 0, the particular solution is found as for the prior case.
Again we have a constant temperature in the cooling air so that 4- = 0, but now
To= T2 because of the step change. The particular solution is then
4,gV
hA8
Tp = hgV + T2
(5.8)
by the same analysis as above. However, there is also a transient response to the
step function, such that
Th
=
Ce~
.
(5.9)
At last we obtain the following formula for temperature change of the MCMs in
response to a step change in the temperature of the cooling air, by summing the
particular and homogeneous solutions:
T(t) =IT +T
where the constant C
=
=T 2 +
hA8
+ (T1 - T2 )ePhA" t
(5.10)
Ti - T2was found by examining the initial condition of
T = hA + T1 at
t = 0.
0
3
1 att
The plot of such a step response is shown in Figure 5-2. The numbers used here
can be found in Table B.1 in Appendix B, and assume that the MCMs have thermal
properties similar to those of aluminum. The drop in Too from 200 C to 10' C is used as
an example because both temperatures are in the expected temperature range of the
operational MVD; it is therefore a fairly realistic example. Note that the permanent
temperature offset at 100 C is approximately 11.25' C according to Equation 5.10
as well as according to an analysis treating the MCMs as a single infinite slab with
internal heat generation, which can be found in Appendix B. In both cases, the surface
88
temperature offset is denoted by the same term.
Response of MCMs to a drop in Air Temp from 20 C to 10 C
32 -
30-
28a)
C)
26a)
CL
E
024-
22-
200
20
40
60
Time (s)
80
100
120
Figure 5-2: Step response of system to a 100 step in air temperature.
A lumped capacitance model was not assumed in the slab analysis, and instead I
assumed a parabolic temperature profile in the MCMs. This analysis showed the highest internal temperature to be only about 0.0014' C above the surface temperature,
supporting the earlier decision to use a lumped capacitance model.
5.2
Closed-Loop Control
As mentioned previously, there is currently no closed-loop control of the system.
This section briefly explores the idea of implementing closed-loop control using the
temperature of the cooling air as an input variable and the temperature of the MCMs
as an output variable (see Figure 5-1).
Some of these results may not be entirely realistic due to limitations on the control
89
of the temperature of the cooling air itself. The heat exchangers currently in use can
remove about 1550 W from the air according to recent work by Hubert van Hecke.
However, for the purposes of this analysis I assume that the temperature of the cooling
air can be controlled with arbitrary speed and without regard to the heat in the air
return line.
The first step in this analysis is to derive the transfer function for the system. Substituting appropriate numbers into Equation 5.3 and converting back to temperature
notation, we obtain the following equation:
29.627
dT
+ T - .0033 = To
dt
(5.11)
where T, is the temperature of the cooling air, which is the input to the system.
We recognize that there is an offset in temperature, and set T - .0033 = t where
dtdT All further analysis controls for this offset temperature rather
than T.
dt
dT
-
dT
29.627- +
dt
= T
T
(5.12)
Putting this in the form of a transfer function in s, we obtain the equation below.
Note that a term representing a pure time delay has been added to the numerator of
the transfer function, to account for the fact that cooling air has to travel from the
heat exchangers to the MCMs when any controlling action is taken, and this process
takes approximately 0.15 seconds as derived earlier.
(.03375)e-0- 15 s
s+.03375
(513)
This system has one real axis pole at s = -0.03375 with a corresponding time
constant of about 30 seconds. A frequency response plot of the uncompensated system
is shown in Figure 5-3.
90
Uncompensated system
.........
........
.
.
..
.
.
...
......
.....
..
..
...
.....
.
.......
...
..
.
...
.....
....
W
...
.
:
...........
.....
.......
.....
.
...........
.......
...
...
I1
.......
....
..........
........ ...
...
....
........
..
......
10
..
...
..
...
...
...
.......
...
.
....
.....
...... .........
...
...
...
..
...
........
....
.........
......
........... ..........
...........
..
........
C
..
..
.
.
.
.
.
...........
cc
..
...
..
......
...
..
..
..
..
.....
...
....
10-2
..... ......
..
..
..
....
....
.................
...
...
...
......
...
....
. ...
:.
.....
'
.'
'..
.... : . : ..
'
'
'
'.
'
'
'
.-.-.-'
'
'
'
..
.
.
.
..
.
..
..
. ......
..
...
...
..
..
........
......
......
..
........
..
.. ....
..............
.........
......
.....
..
..........
....
.
......
..
..........
..
.....
..
........
100 ..
...
...
...
....
. ....
...
..
.
103
-3
10
102
100
10
10
0
-... .
- ...
-. .
-50 - . . . .. . .
-- - .......
Co-100
-150 - . . ... ...
-
.-.-.-
...
......
. . . ..
.. . . .
-
.
-
.
-200
10-3
10-2
10u
100
10
frequency (rad/s)
Figure 5-3: Frequency plot of the uncompensated system.
5.2.1
Closed Loop Control
The system with no controller is simply a low-pass filter with a single pole at s
-0.03375.
=
There is also a pure time delay of about 0.15 s due to the time it takes
air to travel from the heat exchangers to the MCMs. The effects of the time delay
become evident at about 1 Hz and dominate the frequency response by 10 Hz, as can
be seen in Figure 5-3.
As shown above in Figure 5-2, the system takes about 120 seconds to respond to a
step change in the temperature of the cooling air. If we wish to improve this response
time as well as reduce the constant steady-state error resulting from the MCMs'
internal heat generation, some form of closed-loop control must be implemented.
One appropriate mode of control would be PI control. Some form of integral
control will eliminate steady-state error in the step response, and we place the zero in
such a way as to extend the bandwidth, which is severely limited by the time delay,
91
as much as possible. To design this system, we first place a pole at zero to provide an
integral component to the response, and examine the resulting system to determine
the optimal zero location and proportional gain. The open-loop transfer function of
the system is now of the form
.03375e- 0.15s
s(s + .03375)
System with pole added at the origin
102
10
10 2
0
-10
0)
_3
10
10
10-2
101
Ca
-0c
- . . . .. . . .
.
-........
-.
-50
10
-3
.. .
..
.... . . . . . . . .
-.
......
.......
10-2
10-1
-
-.
.... .......
-..
100
101
frequency (rad/s)
Figure 5-4: The system with a pole added at the origin.
Figure 5-4 shows a frequency response plot of the system with a pole added at
the origin. It has now lost some bandwidth due to increased attenuation at high
frequencies, but this will be cancelled out when we add the zero. More importantly,
we can now look at the phase to see where that zero should be placed to maximize
bandwidth (which of course must be before the phase crossover frequency wPc, where
the phase shift is -1800).
The real limit on the bandwidth of the system is the time
delay, which imposes an ever-increasing phase lag with increasing frequency.
92
T desired.
T MCM
Figure 5-5: Block diagram of the system with unity feedback and PI control.
Keeping in mind that a zero induces a slope in the phase plot for about a decade
before and after its location, the bode plot in Figure 5-4 suggests placing a zero with
an associated breakpoint at about w = 0.1 or w
=
0.2. Experimentation shows that
these values do result in a near optimal increase in wpc, which cannot be increased
beyond about 10 rad/s due to the time delay. I chose to place the zero breakpoint
at w
=
0.1 because it increases w,c as much as any other value and does not let the
phase lag more than 1200 at any point before wc, the gain crossover frequency where
gain
=
0 dB. The last step in the design of the system is to add a proportional gain of
100, which allows for a phase margin of about 60'. The system loop transfer function
is then given by
0 15
GG~ =(3.375s + 0.3375)e- - "
s2 + 0.03375s
(515)
The frequency response plot for this PI-controlled system is shown in Figure 5-6,
along with a step response. It is clear that the response of the system is faster, and
that steady-state error has been reduced or eliminated. 3 The bandwidth has been
increased by approximately two decades, from w - 0.1 Hz to w r 10 Hz.
3
0f course, there is still an 11.250 C difference between the air temperature and the MCM
temperature, but this should not really be considered an error.
93
System with P control (zero at 0.1, gain of 100)
104
102
II)
-o
C
01
In
100
1021
102
10
100
101
101
100
101
WD
10-3
10-2
frequency (rad/s)
Figure 5-6: Frequency response of the system with PI control.
Step response of PI-controlled system, showing time delay
1.21
6
(D
5D
.~0.8
C
0
CL
0.6
(-
E
S?
U)
0.4
0.2
0L
0
2
3
4
Time (s)
5
6
Figure 5-7: Step response of the system with PI control.
94
8
5.3
Conclusions
The primary function of the air cooling systems is to keep the MCMs at a constant temperature while the MVD is in operation over a period of weeks or months.
Moreover, the MCMs are generating a constant heat load during this time, and no
fluctuations in this or any other heat load are expected. Even in the case of catastrophic cooling system failure or unexpected increases in heat load, it will almost
certainly take several minutes for the relevant CMOS components to overheat. It
is therefore far from evident that the cooling systems of the MVD need to respond
extremely quickly to changes either in the desired temperature or the heat load.
However, it is also clear from the above analysis that closed loop control could decrease the response time of the system should the requirements of the system change
in some way, as well as eliminating the need for a human operator to intervene whenever the system encounters some disturbance that could be remedied by automatic
control.
Since the implementation of such systems is generally fairly straightfor-
ward and inexpensive, future developers of the MVD might well choose to implement
closed-loop control on the cooling systems for these reasons.
95
Appendix A
Source Code for Monitoring
Program
This is the source code for the monitoring of the cooling systems. There is a more
recent version of this code, but this is the last version I worked on myself at Los
Alamos.
/*
C version for the multiplexed serial readout of the MB votages */
/* running on VME cpu
*I get hint from xil.c.
*/
/*
*/
*/
/* June, 1998, YG.KIM
*/
*1
/*
/* copied to custom adc.c, nov20 98 HvH, and slightly modified:
/*
swapped sclk and din lines
/*
16 chips instead of 12
/*
differential instead of single-ended
/*
/
*/
*/
*
*/
10
* Copied to rccooling.c by Rachel Cunningham, Jan 1999; readout */
/*
/*
modified to show temperature,flow, etc.
/I* t seems that VME cpu doesn't like
/* substituted it with a 'For' loop.
*/
'pow' function. So I simply
*/
*/
*/
/*
/* compile command ------*
/ * cc68k -c -o -DCPU=MC68020 -1$ VX VW BASE/h rc-cooling.c
*
20
#include <stdio.h>
#include <stdlib.h>
#include <math.h>
#include <sys/types.h>
96
#include "/usrl/coda-vl.4/VXWORKS68K51/include/ca.h"
#include "vxWorks .h"
#include "taskLib.h"
int analog(int);
int setpt(int);
void show options(void);
30
void killtime(void);
STATUS rc_cooling(){
int ij,k,m,n,ichan,index;
int fO,f2,f17;
int
int
int
int
int
int
/*
port[4];
q,data,ibit,goon,power,cmpdata;
bO,cl;
aO,al,a2,a3;
slotl,slot16;
regport,regnimin;
int ival[16][8] = { 0*128 };
float ival2 [16][8]; */
/*int icontrol[8]=
1 ,0,0,0,1,1,1,1
40
};
int icontrol[8] = { 1,0,0,0,1,0,1,0 }; /* switch to differential */
/*
int jcontrol[8][3] = { {0,,0}, {1,0,0}, {0,0,1}, {1,0,1},
{0,1,0}, {1,1,0}, {0,1,1}, {1,1,1} }; */
int jcontrol[4][3] = { {0,0,0}, {0,0,1},{0,1,0}, {0,1,1} } ;
/*
int jcontrol[4][3] = { {1,0,0}, {1,0,1},{1,1,0}, {11,11} }; *1
50
char c,command[50];
int dinon = 16;
int sclk_on = 32;
int alloff = 0;
int both_off = 15;
int sclk_off = 31;
60
int
int
int
int
int
int
T1_l, T1_h, T1_hh;
Fl 1,F1_h;
T2_l, T2_h T2_hh;
F2_1, F2_h;
T3_1, T3_h, T3_hh;
F3_1, F3_h;
int H1_a;
int T4_l, T4_h, T4_hh;
int T5_l, T5_h, T5_hh;
int F4_1;
70
int Ti_a, T2_a, T3_a, T4_a, T5_a;
int voltage, M, cnt;
int
int
int
int
int
T6_l,
F6_1,
T7_l,
F7_1,
T8_1,
T6_h, T6_hh;
F6_h;
T7_h, T7_hh;
F7_h;
T8_h, T8_hh;
97
int F8_l, F8_h;
int H2_a;
int T9_1, T9_h, T9_hh;
int T10_l, T10_h, T10_hh;
int F9_1;
int T6_a, T7_a, T8_a, T9_a, T10_a;
FILE *log;
80
fO = 0;
f2
2;
f17
17;
a0 =0;
al = 1;
a2 = 2;
a3 = 3;
bO = 0;
cl = 1;
sloti = 1;
slot16 = 16;
M = 1000;
90
/*
*/
100
puts(" Press Enter to continue...\n");
while ((c = getchar() != \n') { }
printf("Init process starts. . .1");
cdreg(&port[0], bO, c1, sloti, a0);
cdreg(&port[1], bO, c1, sloti, al);
cdreg(&port[2], bO, c1, sloti, a2);
cdreg(&port[3], bO, c1, sloti, a3);
cdreg(&reg-nimin, bO, c1, slot16, a0);
printf(" done.
\n\n");
/* 42 */
110
show options();
go-on =1;
cnt=0;
log = fopen("/usr1/mvdonl/camac/logf ile.txt", "w");
if (log == NULL){
printf("File error\n");
120
}
/**
WHILE LOOP BEGINS **/
while(go on)
{
cnt++;
killtime(;
printf("\nADC>> ");
gets(command);
130
98
/ *** READ COMMAND ***|
if ( strstr(command, "read")
for ( i = 0 ; i <16 ; i++
for (j = 0 ; j < 8 ; j++)
ival[i][j]
I cnt==1 ) {
)
0;
=
puts("\n Starting serial communication...
regport = port[0];
cmpdata = alloff;
data = ~(cmpdata);
cfsa(f17,reg-port,&data,&q);
for ( i= 0; i < 16 ;i++
/
*
){ /* loop over ADCs */
cmpdata = cmpdata I i
data = ~(cmpdata) ;
cfsa(f17,regport,&data,&q);
for ( ichan = 0; ichan < 8 ; ichan++ ){
for ( ichan
=
140
");
loop over channels */
){ /* now only 0-3
0; ichan < 4 ; ichan++
150
*/
for ( j = 0 ; j < 3 ; j++ )
icontrol[j+1] = jcontrol[ichan][j];
/ * printf("Control word:");
for (j= 0 ; j < 8 ; j++)
printf("%d ",icontrol[j]); */
for ( k = 0 ;k < 8 ;k++ ){ /* clock out the control bits */
if ( icontrol[k] == 0 ) {
cmpdata = cmpdata & bothoff;
160
data = ~(cmpdata);
cfsa(f17,regport,&data,&q);
}
if ( icontrol[k] == 1
){
cmpdata = cmpdata I din-on;
cmpdata = cmpdata & sclk_off;
data = -(cmpdata);
cfsa(f17,regport,&data,&q);
}
cmpdata = cmpdata I sclk on;
data = ~(cmpdata);
cfsa(f17,regport,&data,&q);
}
cmpdata = cmpdata & both_off
data = ~(cmpdata);
cfsa(f17,regport,&data,&q);
/* din; off, sclk; off */
cmpdata = cmpdata I sclk on;
data = ~(cmpdata);
cfsa(fl7,regport,&data,&q);
180
/ * printf("\nclock data out; "); */
for ( j = 0 ; j < 16 ;j++)
170
{
cmpdata = cmpdata & sclk_off;
data = ~(cmpdata);
cfsa(fl 7,regport,&data,&q);
99
cmpdata = cmpdata
I sclk on;
data = ~(cmpdata);
cfsa(f17,regport,&data,&q);
190
cfsa(f,regnimin,&ibit,&q);
index = 11 -j;
k = 0;
power = 1;
while (k < index)
{
power = power << 1;
k = k + 1;
}
200
ival[i][ichan} = ival[i][ichan] + ibit*power;
} /* loop for 12 bits */
for ( j = 0 ; j < 4 ; j++ ) {
cmpdata = cmpdata | sclk on;
data = ~(cmpdata);
cfsa(f17,regport,&data,&q);
cmpdata = cmpdata & sclk_off;
data = ~(cmpdata);
cfsa(f17,regport,&data,&q);
}
210
/* printf("chip#,chan#,ival : %d %d %d\n",i+1,ichan,ival[i][ichan]);*/
} /* loop over channels */
cmpdata = alloff;
}1* loop over ADCs */
printf(" ADCs have been read.\n");
}
220
/**
THE DISPLAY COMMAND ***
else if (strstr(command, "display") | cnt % 100
/*
puts("In display routine\n");
==
0)
{
*/
T1_a = analog(ival[9][3]);
T1l = setpt(ival[8][1]);
T1_h = setpt(ival[8][3]);
Tlhh = setpt(ival[9][1]);
230
F1l = setpt(ival[10][1]);
Flh = setpt(ival[10][3]);
T21 = setpt(ival[11j[1]);
T2h = setpt(ival[11][3]);
T2_hh = setpt(ival[12][1]);
T2_a = analog(ival[12][3]);
F21
=
setpt(ival[13][1]);
240
100
F2_h = setpt(ival[13][3]);
T3_1 = setpt(ival[14][1]);
T3_h setpt(ival[14][3]);
T3_hh = setpt(ival[15][1]);
T3_a = analog(ival[15][3]);
F3_1 = setpt(ival[8][0]);
F3_h = setpt(ival[8][2]);
250
H1_a
=
(ival[9][0] * 20);
T4_1 = setpt(ival[9][2]);
T4_h = setpt(ival[10][0]);
T4_hh = setpt(ival[10][2]);
T4_a = analog(ival[11][0]);
T5_1 = setpt(ival[11][2]);
T5_h = setpt(ival[12][0]);
T5_hh = setpt(ival[12][2]);
T5_a = analog(ival[13][0]);
F4_1
=
260
setpt(ival[13][2]);
High High-high\n");
Low
Sensor
printf("\n
printf("--------------------------------------\n");
printf("
printf("
printf("
printf("
I Ti = %d.X2d C", Tla/1000, (T1_a % 1000)/10);
%d", T1_l);
%d", Tlh);
%d\n", Tlhh);
printf("
printf("
printf("
printf("
I T2 = %d.X2d C", T2_a/1000, (T2_a % 1000)/10);
Xd", T2_1);
%d", T2_h);
Xd\n", T2_hh);
printf( "A
printf("
printf("
printf("
| T3 = %d.7X2d C", T3_a/1000, (T3_a % 1000)/10);
printf("i
Xd", T3_1);
%dld", T3_h);
%d\n", T3_hh);
printf("r
%d",Fl!);
%d\n",Flh);
| F2");
%d",F2_1);
printf("
printf("
280
| Fl");
printf("
printf("
270
%d\n", F2_h);
290
printf("
printf("
printf("
|F3"1);
%d", F3_1);
Xd\n", F3_h);
101
printf("
I H1 = %d.%2d RH\n", Hla/1000, (H1_a % 1000)/10);
printf("-----------------------------------------\n)
printf("L
\n");
300
printf("i
printf("
printf("
printf("
I T4 = %d.%2d C", T4_a/1000, (T4_a % 1000)/10);
Xd", T4_1);
%d", T4_h);
%d\n", T4_hh);
printf("q
printf("
printf("
printf("
I T5 = %d.7X2d C", T5_a/1000, (T5_a % 1000)/10);
%d", T5_1);
Xd", T5_h);
%d\n", T5_hh);
printf("u
printf("
| F4");
310
Xd\n", F4_1);
printf("i I\n");
printf("d I\n");
printf("-----------------------------------------\n");
/***
End half one, start half two***/
T6_a = analog(ival[1][3]);
T6_1
setpt(ival[0][1]);
T6_h = setpt(ival[0][3]);
T6_hh = setpt(ival[1][1]);
320
F6_1 = setpt(ival[2][1]);
F6_h = setpt(ival[2][3]);
T7_1 = setpt(ival[3][1]);
T7_h setpt(ival[3][3]);
T7_hh = setpt(ival[4][1]);
T7_a = analog(ival[4][3]);
330
F7_1 = setpt(ival[5][1]);
F7_h = setpt(ival[5][3]);
T8_1 = setpt(ival[6][1]);
T8_h
setpt(ival[6][3]);
T8_hh = setpt(ival[7][1]);
T8_a = analog(ival[7][3]);
340
F8_1 = setpt(ival[0][0]);
F8_h = setpt(ival[0][2]);
H2_a
=
(ival[1][0] * 20);
T9_I = setpt(ival[1][2]);
T9_h = setpt(ival[2][0]);
T9_hh = setpt(ival[2][2]);
102
T9_a
=
analog(ival[3][0]);
350
T10_1 = setpt(ival[3][2]);
T10_h = setpt(ival[4][0]);
T10_hh = setpt(ival[4][2]);
T10_a = analog(ival[5][0]);
F9_1 = setpt(ival[5][2]);
printf("\n
Sensor
Low
High
High-high\n");
printf( "---------------------------------------\n");
printf(" I
printf("
printf("
printf("
T6 = %d.%2d C", T6_a/1000, (T6_a % 1000)/10);
%d",T6_1);
%d",T6_h);
%d\n", T6_hh);
printf("
printf("
printf("
printf("
| T7 = %d.%2d C", T7_a/1000, (T7 a % 1000)/10);
Xd", T7_1);
Xd", T7_h);
%d\n", T7_hh);
printf("A
printf("
printf("
printf("
I T8 = %d.YX2d C", T8_a/1000, (T8_a % 1000)/10);
%d", T81);
%d",T8_h);
Xd\n", T8_hh);
printf("i
printf("
printf("
|F6");
printf("r
|F7");
printf("
printf("
printf("
printf("
printf("
%d",F7_1);
Xd\n", F7_h);
|F8");
%d",F8_1);
%d\n", F8_h);
printf("
| H2 = %d.X2d RH\n", H2_a/1000, (H2_a % 1000)/10);
360
370
%d", F6_1);
%d\n", F6_h);
380
printf("-----------------------------------------\n");
printf("L
|\n");
printf("i
printf("
printf("
printf("
| T9 = Xd.7X2d C", T9_a/1000, (T9_a % 1000)/10);
Xd", T9_1);
Xd", T9_h);
%d\n", T9_hh);
printf("q
printf("
printf("
printf("
| T10 = Xd.X2d C", T10a/1000, (T10_a % 1000)/10);
%d", T10_1);
%fd",T10_h);
Xd\n", T10_hh);
390
103
400
printf("u
F9");
printf("
%d\n", F9_1);
printf("i
|\n");
printf("d I \n");
printf("-----------------------------------------\n");
410
} /*End display command*/
/ ***
CHANNELS COMMAND
***/
else if (strstr(command, "channels")){
printf("\n-------------------------------\n");
printf("chip#
|
CH3
CH2\n");
printf("
CH1
CHO\n");
printf("--------------------------------\n");
420
for ( i =15 ; i >=0 ;i-- ) {
printf(" UX2d
I %4d %4d\n",i+5,ival[i][3],ival[i][2]);
printf("
X4d X4d\n",ival[i][1],ival[i][0]);
%
if (i==8) printf("------------------------------\n");
}
printf("--------------------------------\n");
430
}
*** EXIT COMMAND *
else if ( strstr(command, "exit") | cnt >= 500)
go-on = 0;
puts("\n Bye.\n");
{
}
/*
440
SET CLOCK MODES
***/
else if ( strstr(command, "int") ) {
puts("\n Set Internal clock mode.
icontrol[7] = 0;
\n");
I
else if ( strstr(command, "ext") ) {
puts("\n Set External clock mode.
icontrol[7] = 1;
\n");
450
}
/*
LOGFILE COMMAND *
else if (strstr(command, "log") ) {
fprintf(log, "I 'm a logf ile . . %d\n", 5);
104
printf("I'm a log!\n");
}
/ ***INVALID COMMAND *
460
{
else
show options();
}
} / * while loop closed */
return(OK);
}
int setpt(int voltage){
if (voltage >= 3000){
470
return 1;
}
return 0;
}
int analog(int voltage){
int temp;
int M;
M = 1000;
temp = voltage*200 - 273*M;
if (temp>0)
return temp;
return 10000;
480
I
void show-options(void)
puts("\n
puts("
puts("
puts("
puts("
puts("
puts("
{
Accepted commands are:\n");
read - read voltages\n
exit - exit program");
display - display sensor readings");
channels - display channel readouts");
int - reset internal clock");
ext - reset external clock");
channels - show channel readings\n");
490
}
void killtime(void) {
int i, j, k, 1;
for (i = 0; i < 32000; i++){
for (j = 0; j < 1000; j++){
500
k = 1;
}
}
printf("Waste that time.\n");
I
510
105
106
Appendix B
Infinite Slab Analysis of MCMs
B.1
Assumptions
This appendix documents another approximate calculation of the state of the MCMs,
based on the assumption that they will have the same temperature as an infinite slab
of aluminum with internal heat generation but using the same coefficent of heat
transfer to air as is used in Chapter 5. This analysis does not make any assumption
of lumped capacitance, expecting rather that the distribution of temperature inside
the slab will be parabolic.
Values used for this calculation (as well as the calculations in Chapter 5) can
be found in Table B.1. The thermal values used are those of aluminum, and the
dimensions of an MCM are 50 mm x 48 mm x 1.7 mm.
Sym bol
V
As
Property of MCMs
Total volume
Value
Total surface area
Q
Total heat dissipation
0.3456 m 2
272 W
q11
Heat generation by volume
Heat flux through surface
h
p
cp
k
2.938 x 10-4 m 3
Coefficient of heat transfer
Density
9.26 x 105 W/m 3
787 W/m 2
70 W/m 2 oK
2702 kg/m 3
Heat capacity
Thermal conductivity
903 J/kg0 K
237 W/m 0 K
Table B.1: Table of values used in slab analysis of MCMs.
107
B.2
Calculations
First we obtain the surface temperature T, from the electrical analogy shown in
Figure B-1. Too denotes the temperature of the cooling air flowing over the slab.
q"
Ts
T0
1/h
Figure B-1: Electrical analogy for infinite slab analysis.
T = Too + (1/h)q"
(B.1)
If T, is 100 , for example, the surface temperature will be 21.25' by this analysis.
Finally, assuming a parabolic distribution of temperature inside the slab, we can
derive the temperature in the center of the slab using the equation
TO =
2
2k
+TS
(B.2)
Where L is half the thickness of the slab (0.85 mm) and To is the temperature at
the center of the slab, where temperature is highest. Continuing with the example of
Too = 100 , the temperature in the center of the slab is .0014 higher than the surface
temperature, or again about 210C.
The surface temperature offset term in Equation B.1 is the same as the one derived
in Equation 5.10,1 and the small temperature difference between the edge of the slab
and the center lends further support to the assumption of lumped capacitance made
at the beginning of Chapter 5.
'This may not be immediately obvious because the notation is slightly different, but note that
4h A.
Q
h A,
-~
h
108
Bibliography
[1] Multiplicity and Vertex Detector web site: http://p2hp2.lanl.gov/phenix/mvd.
[2] J.D. Bernardin, E. Bosze, D. Clark, J. Boissevain, and J. Simon-Gillo, 1997, "An
Experimental Investigation of an Air Cooling Scheme for the Multichip Modules
of the Multiplicity and Vertex Detector," Technical Note LA-13320-MS, Los
Alamos National Laboratory, Los Alamos, NM 87545.
[3] J.D. Bernardin and E. Bosze, 1997, "An Experimental Investigation of a Liquid
Cooling Scheme for the Low Dropout Voltage Regulators of the Multiplicity
and Vertex Detector," PHENIX Note #329, PHENIX-MVD-97-43, Los Alamos
National Laboratory, Los Alamos, NM 87545.
[4] J.D. Bernardin and R. Cunningham, 1997, "Design of the Cooling Systems for
the Multiplicity and Vertex Detector," Phenix Note #330, PHENIX-MVD-97-44,
Los Alamos National Laboratory, Los Alamos, NM 87545.
[5] J.D. Bernardin, E. Bosze, J. Boissevain, J. Simon-Gillo, 1997, "An Experimental
Investigation of Airflow-Induced Vibrations within the Multiplicity and Vertex
Detector."
[6] Jan Boissevan, 1998, "Revisions to the Design of the Cooling Systems for the
MVD."
[7] E. Bosze, J. Simon-Gillo, J. Boissevain, J. Chang, R. Seto, "Rohacell Foam
as a Silicon Support Structure Material for the PHENIX Multiplicity Vertex
Detector," Nuclear Instruments and Methods (in Press).
109
[8] Z. Chen and W. Gregory, 1996, "Electronics Cooling of PHENIX MVD," Internal design report, Engineering Sciences and Applications Division, Design
Engineering, Los Alamos National Laboratory, Los Alamos, NM 87545.
[9] R. Conway, 1999, "Developing a Radio Frequency Enclosure for the Multiplicity
Vertex Detector."
[10] R. Cunningham, J.D. Bernardin, and J. Simon-Gillo, 1997, "An Experimental Investigation of an Air Cooling Scheme for Removing Environmentally Imposed Heat Loads from the Multiplicity and Vertex Detector's Main Enclosure,"
PHENIX Note #328, PHENIX-MVD-97-42, Los Alamos National Laboratory,
Los Alamos, NM 87545.
[11] Dorf, R.C. and Bishop, R.H., 1995, Modern Control Systems, 7th Ed., AddisonWesley Publishing Company Inc.
[12] Francis Halzen and Alan Martin, 1984, John Wiley and Sons, Inc, Quarks and
Leptons: An Introductory Course in Modern Particle Physics.
[13] Incropera, F.P. and DeWitt, D.P., 1987, Fundamentals of Heat and Mass Transfer, 2nd Ed., John Wiley and Sons, Inc., New York.
[14] J. Kapustinsky et al, 1997, "A Multiplicity-Vertex Detector for the PHENIX
Experiment at RHIC," Phenix Note #312, PHENIX-MVD-97-29
[15] J.S. Lock, E. Bertson, J. Boissevain, D.J. Clark, W. Collier, R. Hammock, B.V.
Jacak, A. Morgan, P. Roybal, S. Shaheen, J. Simon-Gillo, and J. P. Sullivan,
1994, "Air Cooling of Front-End Electronics for Silicon Detectors in a Collider
Experiment," PHENIX MVD Technical Note, NIM A 345, 284, Los Alamos
National Laboratory.
[16] L. Parietti, C. Potter, T. Thompson, and R. Martin, 1996, "ESA-DE PHENIX
MVD Design Review," Internal design report, Engineering Sciences and Applications Division, Design Engineering, Los Alamos National Laboratory, Los
Alamos, NM 87544.
110
[17] van Hecke, H., 1997, "MVD Technical Tolerance Studies," PHENIX Technical
Note, PHENIX-MVD-97-24, PHENIX Note #307, Los Alamos National Laboratory, Los Alamos, NM, 87545.
111