Safety, Injury & Countermeasures Astronaut Extravehicular Activity -
advertisement

Astronaut Extravehicular Activity - Safety, Injury & Countermeasures
&
Orbital Collisions & Space Debris - Incidence, Impact & International Policy
by
Roedolph A. Opperman
B.Eng., Mechanical Engineering
University of Pretoria, South Africa, 2006
Submitted to the Department of Aeronautics and Astronautics and the Engineering Systems Division
in Partial Fulfillment of the Requirements for the Degrees of
Master of Science in Aeronautics and Astronautics
MASSACHUSETTSNNS TUTE
and
Master of Science in Technology and Policy
OCT 1
at the
LIBRARIES
MASSACHUSETTS INSTITUTE OF TECHNOLOGY
ARCHIVES
September 2010
© 2010 Massachusetts Institute of Technology. All Rights Reserved.
Author ................................... *...................................
Department of Aeronlities.&-Astronautics, and Engineering Systems Division
August 6, 2010
Certifie i by .....................................
. .. .
Dava J.Newman, Ph.D.
Professor, MacVicar Faculty Fellow, HST Affiliate
Department of Aeronautics & Astronautics, and Engineering Systems Division
Thesis Supervisor
A ccepted by ..............................................
Dava J. Newman, Ph.D.
Professor of Aeronautics and Astronautics and Engineering Systems
Director, Technology and Policy Program
7
Accepted by .........................
/
s
........
Eytan H. Modiano, Ph.D.
ssoiate Professor of Aeronautics and Astronautics,
Chair, Graduate Program Committee
Astronaut Extravehicular Activity - Safety, Injury & Countermeasures
&
Orbital Collisions & Space Debris - Incidence, Impact & International Policy
by
Roedolph A. Opperman
Submitted to the Department of Aeronautics and Astronautics and the
Engineering Systems Division on August 6, 2010 in partial fulfillment of the
Requirements for the Degrees of Master of Science in Aeronautics and
Astronautics and Master of Science in Technology and Policy
Engineering Abstract
Extravehicular Activity (EVA) spacesuits are a key enabling technology which allow astronauts
to survive and work in the harsh environment of space. Of the entire spacesuit, the gloves may
perhaps be considered the most difficult engineering design issue. A significant number of
astronauts sustain hand and shoulder injuries during extravehicular activity (EVA) training and
operations. In extreme cases these injuries lead to fingernail delamination (onycholysis) or
rotator cuff tears and require medical or surgical intervention. In an effort to better understand
the causal mechanisms of injury, a study consisting of modeling, statistical and experimental
analyses was performed in section I of this thesis.
A cursory musculoskeletal modeling tool was developed for use in comparing various
spacesuit hard upper torso designs. The modeling effort focuses on optimizing comfort and range
of motion of the shoulder joint within the suit.
The statistical analysis investigated correlations between the anthropometrics of the hand
and susceptibility to injury. A database of 192 male crewmembers' injury records and
anthropometrics was sourced from NASA's Johnson Space Center. Hand circumference and
width of the metacarpophalangeal (MCP) joint were found to be significantly associated with
injuries by the Kruskal-Wallis test.
Experimental testing was conducted to characterize skin blood flow and contact pressure
inside the glove. This was done as part of NASA's effort to evaluate a hypothesis that fingernail
delamination is caused by decreasing blood flow in the finger tips due to compression of the skin
inside the extravehicular mobility unit (EMU) glove. The initial investigation consisted of a
series of skin blood flow and contact pressure tests of the bare finger, and showed that blood
flow decreased to approximately 60% of baseline value with increasing force, however, this
occurred more rapidly for finger pads (4N) than for finger tips (ION). A gripping test of a
pressure bulb using the bare hand was also performed at a moderate pressure of 13.33kPa
(100mmHg) and at a high pressure of 26.66kPa (200mmHg), and showed that blood flow
decreased 50% and 45%, respectively. Excessive hyperperfusion was observed for all tests
following contact force or pressure, which may also contribute to the onset of delamination.
Preliminary data from gripping tests inside the EMU glove in a hypobaric chamber at NASA's
Johnson Space Center show that skin blood flow decreased by 45% and 40% when gripping at
3
moderate and high pressures, respectively. These tests show that finger skin blood flow is
significantly altered by contact force/pressure, and that occlusion is more sensitive when it is
applied to the finger pad than the finger tip. Our results indicate that the pressure on the finger
pads required to articulate stiff gloves is more likely to impact blood flow than the pressure on
the fingertips associated with tight or ill-fitting gloves. Improving the flexibility of the gloves
will therefore not only benefit operational performance, but may also be an effective approach in
reducing the incidence of finger injury.
Space Policy Abstract
EVA injury is only one of many dangers astronauts face in the extreme environment of space.
Orbital debris presents a significant threat to astronaut safety and is a growing cause of concern.
Since the dawn of satellites in the early 1950's, space debris from intentionally exploded
spacecraft, dead satellites, and on-orbit collisions has significantly increased and currently
outnumbers operational space hardware. Adding to this phenomenon, the advent of commercial
spaceflight and the recent space activities in China and India to establish themselves as spacefairing nations are bound to accelerate the rate of space debris accumulating in low Earth orbit,
thus, exacerbating the problem. The policies regulating orbital debris were drafted in the 1960s
and 1970s and fail to effectively address the dynamic nature of the debris problem. These
policies are not legally enforced under international law and implementation is entirely
voluntary.
Space debris is a relevant issue in international space cooperation. Unless regulated, some
projections indicate space debris will reach a point of critical density, after which the debris will
grow exponentially, as more fragments are generated by collisions than are removed by
atmospheric drag. Space debris proliferation negatively impacts human spaceflight safety,
presents a hazard to orbiting space assets, and may lead to portions of near-Earth orbit becoming
inaccessible, thus limiting mission operations.
The aim of this research effort was to review current international space policy,
legislation and mitigation strategies in light of two recent orbital collision episodes. The first is
the February 2009 collision between a defunct Russian Cosmos spacecraft and a commercial
Iridium satellite. The second is China's display of technological prowess during the January
2007 intentional demolition of its inactive Fengyun-IC weather satellite using a SC-19 antisatellite (ASAT) missile. In each case the stakeholders, politics, policies, and consequences of
the collision are analyzed.
The results of this analysis as well as recommendations for alternative mitigation and
regulatory strategies are presented.
Thesis Supervisor: Dava J. Newman, Ph.D.
Title: Professor, MacVicar Faculty Fellow, HST Affiliate
MIT Department of Aeronautics & Astronautics, and Engineering Systems Division
ACKNOWLEDGEMENTS
While spending the past three years surrounded by thick, windowless concrete walls that allow
for no cell phone reception, accumulating long hours of research conducted in artificial lab
lighting and many a late nights - some without sleep, others spent sleeping on a lab couch, desk,
or the occasional centrifuge - I came to realize that I could not have kept this up without the help
that I received from so many. I would like to thank the following people without whom this work
would not have come to fruition.
Professor Dava Newman, my academic advisor for her active support and guidance for both the
engineering and policy sections of this work. Thank you for teaching me so much about not only
scholarly research but also life in general. Thank you for inspiring me, driving me, and igniting
my passion for space flight. Before I came to MIT it had been the farthest thing in my mind to
get involved in this field, thinking that a young guy from a small country at the southern tip of
Africa does not stand a chance. You were the one who proved me wrong and who introduced me
to this amazing adventure. Thank you for all that you have done for me on so many occasions
and for your big role in preparing me for the future. I deeply appreciate all that you have done for
me and I will never forget it.
Dr. James Waldie for all your support and advice throughout this study. You have always
shown a keen interest in my work and at so many occasions guided me to ask the right questions
and helped me to overcome hurdles along the way. Thank you for being such a great role model
to look up to, not only in a professional setting but also a personal one. You have definitely left a
lasting impression on my life.
Dr. Alan Natapoff for being such a great resource and mentor when it comes to all things
statistical and also for being a good friend, someone with a sincere interest in my life and who
always makes time to help. I really appreciate all your guidance and assistance and I will truly
miss our talks.
Dr. Jeff Jones for making it possible for me to spend a summer at NASA's Johnson Space
Center and for entrusting to me such great responsibilities throughout the astronaut hand injury
study. I appreciate all that you have done.
Dr. Rafat Ansari for inviting me to spend a summer at NASA's Glenn Research Center and for
the opportunity to learn about the technical side of our study. Thank you for all your invaluable
advice and wisdom regarding my future career, for fueling my interest in becoming a pilot and
for believing in me.
My funding sources: ILC Dover, the MIT Portugal Program (MPP) and the National Space
Biomedical Research Institute (NSBRI) for funding my research efforts.
The people at ILC Dover, especially Phil Spampinato, Keith Splawn and George Sharpe, for
their support.
Acknowledgements
Dr. Luca Pollonini, Jim King and Jason Hochstein, my colleagues with whom I worked
closely while at the two NASA centers. I really appreciate all your help and hope to work with
you again in the future.
All the NASA folks for helping me throughout this research effort. Dr. Michael Gernhardt who
is the lead from the NASA Johnson Space Center's Extravehicular Activity Physiology System
and Performance (EPSP) Project, for his input and suggestions in this work. Thanks also in
particular to Lesley Lee, who was my point of contact at EPSP, for all her support and help with
badging, shipping equipment etc. Other members of EPSP include Drs. Jennifer Tuxhorn,
Jennifer Jadwick and Jason Norcross. Dr. John Dewitt with NASA-JSC's Exercise
Physiology Lab, for his help with signal processing and experimental design of the pilot study.
Dr. Rick Scheuring for his suggestions, valuable knowledge on crewmember injury and for
including me in his daily activities at JSC. Dr. Sam Strauss for his work in contributing findings
to the EVA injury database and with the NBL and Dr. Robert Ploutz-Snyder for his helpful
comments and suggestions in our statistical analysis. Elisca Hicks for helping with the badging
process on countless occasions.
Angela Lesser and Trent Barret from the ILC field office at Johnson Space Center, as well as
the glove box technicians for their support and helpfulness in scheduling and running sessions in
the glovebox room.
Ed Hodgson and Steven Dionne from Hamilton Sundstrand for their input and for loaning the
suit hardware used in a preliminary glove study at MIT.
Holzbaur et al. (2005) for making available the SIMM upper extremity model used in this study.
Sofia d'Orey, my office mate, research colleague and close friend. Thank you for all the
countless things you have done for me - be it showing me how to optimize my matlab code,
providing an ear to listen to my problems, or making me smile with a witty comment or
attempting to make me look when you are taking photographs. Obrigado! ©
All of my fellow MVL'ers, especially the EVA group (Brad Holschuh, Allie Anderson and
Aaron Johnson) for all the adventures in the lab and during our EVA meetings. MVL rocks!!!
Brad especially, for being my partner in crime when it comes to EMU spacesuit research. It was
the many hours of CoD that pulled me through. I salute you: Underpants!
Past MVL students, including JunJay Tan (My first officemate, the person who introduced me
to the nerf gun, and a good friend), Chris Oravetz (who's lifestyle serves as a great inspiration
and who helped me achieve my goal of skydiving before the age of 25 (2 more since and
counting...)), Dr. Jessica (Edmonds) Duda, who has always been very helpful and with whom I
had the privilege to work in tackling 2.183. Drs. Leia Stirling and Erika Wagner, for their
examples and helpfulness.
Anthony Wicht and Stephen Zoepf, fellow graduate students who were very helpful in
developing the course of my space policy research.
Acknowledgements
All the MIT administrative and support staff, especially Sally Chapman, Sydney Miller, Ed
Ballo, and Liz Zotos to whom I am eternally grateful for all their help on countless occasions.
Also Barbara Lechner, Beth Marois, Marie Stuppard and Robin Pringle for all their
helpfulness.
Tod Billing and Dave Robertson, for their technical expertise and guidance in design and
fabrication projects.
All my homes away from home: The de Jagers, to whom I was able to make many memorable
trips in Philly and for having South African beer on hand. Baie dankie! Mr. & Mrs. Robinson
for their generous hospitality throughout my stay in Cleveland. The Whitley's for hosting me in
Houston, and The Railstons who often invite me to Wellesley to break away from the often
stressful campus environment.
The Portuguese taxpayers, who indirectly funded me through the MIT Portugal Program to
perform my research here in the States.
Denel Dynamics, for allowing me to pursue this great opportunity of coming to the U.S. for
graduate studies and for funding part of it.
Werner Hugo van Vuuren, my good high school friend for his example, inspiration, advice,
and patience throughout my stay in Harvard. Jy het my laat besef dat ek 'n sukses kan maak hier
in die VSA.
Definitely not at the end of the list due to unimportance, my friends and family back home, for
your encouragement and support even from afar. Ek sou dit nie sonder julle ondersteuning kon
doen nie. Ek waardeer dit opreg en in my hart was ek altyd by julle.
Anyone whom I may have forgotten, please know that I appreciate all the support, guidance and
impact you all had on my work.
Most importantly, my Father in Heaven, without Whose guidance, mercy and blessing none of
this would have been possible.
Reik na die Sterre
Biographical Note
Roedolph Opperman was born in 1984 in Pretoria, South Africa, where he lived up until the time
he moved to the United States in the fall of 2007. From 2003 to 2006, he attended the University
of Pretoria, earning a Bachelor's degree in Mechanical Engineering with a minor in aeronautics
and control. Upon graduation he worked for Denel Dynamics, a South African Aerospace
company, where he stayed for about a year before enrolling to MIT to begin graduate studies as a
dual Master of Science degree candidate in Aeronautics & Astronautics and Technology &
Policy.
Acknowledgements
8
TABLE OF CONTENTS
5
ACKNOW LEDGEM ENTS ......................................................................................
9
.....
TABLE OF CONTENTS........................................................................................
... --------------------............ 13
INDEX OF FIGURES ...........................................................................
------------................. 17
INDEX OF TABLES.............................................................................-...
19
LIST OF ACRONYM S AND ABBREVIATIONS ...............................................................
1. INTRODUCTION
Background..............................................................................................................23
EVA Injury Problem Statement & M otivation ..........................................................
1.2.1 EVA Training-related Shoulder Injury ...........................................................
1.2.2 EVA Hand Injury..........................................................................................
1.3 Space Policy Problem Statement & M otivation.........................................................25
1.3.1 Orbital Collisions............................................................................................25
1.3.2 Regulation of Space Debris.............................................................................25
1.4 Hypotheses & Research Objectives......................................................................
1.4.1 Research Objective: Engineering Section.......................................................
1.4.2 Research Objective: Space Policy Section.....................................................
1.4.3 Research Questions........................................................................................
1.4.4 M ethodology...................................................................................................27
1.4.5 Hypotheses ....................................................................................................
1.4.5.1 EVA Suit Design Tool.................................................................................28
1.4.5.2 Statistical Analysis......................................................................................
1.4.5.3 EVA Glove Task Study...............................................................................
1.4.5.4 Regulation of Space Debris........................................................................
1.5 Thesis Outline ..........................................................................................................
1.6 Contributions............................................................................................................31
1.1
1.2
23
24
24
24
26
26
26
26
28
28
29
29
29
SECTION I: ENGINEERING ANALYSIS
33
2. EVA BACKGROUND
37
2.1 Extravehicular Activity..........................................................................................37
2.3.1 EVA & NBL Injury .......................................................................................
2.3.2 Current Countermeasures...............................................................................
2.3.3 Proposed Countermeasures ............................................................................
2.4 EVA Hand Injury ..................................................................................................
2.4.1 Hand Injury in Spacesuit Gloves - Literature Review ....................................
2.4.2 Fingernail Delamination Incidence..................................................................51
2.4.3 Hand Injury Countermeasures........................................................................
2 .5 C on clu sion ...............................................................................................................
3. MUSCULOSKELETAL DESIGN TOOL
41
43
46
49
50
52
53
55
9
Table of Contents
3.1 Design Tool Developm ent .....------ .
. ----................ .........................................
3.1.1 Musculoskeletal M odeling in SIM M .............................................................
3.1.2 M odeling Strategy .........................................................................................
3.1.3 Hard Upper
g ..........................................................................
3.1.4 Assum ptions and M odel Lim itations.............................................................
3.2 Com fort Envelope ......---------------------..... -.............. ..............................................
3.2.1 Range of Motion............................................62
3.2.2 Joint Torque Calculations...............................................................................
3.3 Conclusion ...............................................................................................................
3.4 Limitations and Future Work.................................................................................
55
56
56
57
61
62
63
64
65
4. STATISTICAL ANALYSIS OF EVA HAND INJURY DATA
4.1 Background - M etric Predictive Study ..................................................................
4.2 Statistical Analysis of Crewm em ber Hand Data.....................................................
4.3 Results....................................................................................................................70
4.4 Discussion......................
. ---..... ------....................................................................
4.5 Conclusion ......................................-...................................................................
67
5. EXPERIMENTAL ANALYSIS OF EVA GLOVE TASKS
5.1 Prelim inary Finger Contact Pressure Investigation.................................................
5.1.1 Test Equipm ent...............................................................................................
5.1.2 M ethod ..............................................................................................................
5.1.3 Results...............................................................................................................83
5.1.4 Discussion of Pilot Study Results....................................................................
5.2 Hand Injury Pilot Study at Johnson Space Center ..................................................
5.2.1 M ethod ..............................................................................................................
5.2.1.1 Test Equipm ent............................................................................................
5.2.1.2 Subjects..........................................................................................................91
5.2.1.3 Testing Procedure.......................................................................................
5.2.1.4 Finger Pad vs. Fingertip Tests ...................... ............ ..................................
5.2.1.5 Pressure Bulb Test.....................................................................................
5.2.2 Results...............................................................................................................95
5.2.3 Discussion .....................................................................................................
5.2.4 Conclusion.........................................................................................................99
79
6. SUMMARY AND CONCLUSIONS
6.1
6.2
6.3
Summ ary................................................................................................................101
Contributions..........................................................................................................
Lim itations and Future W ork..................................................................................
67
68
75
78
79
79
83
85
86
86
87
92
94
94
97
101
101
102
SECTION II: POLICY ANALYSIS
105
7. ORBITAL COLLISIONS & SPACE DEBRIS
109
7.1 Introduction and Background..................................................................................
7.2 Tracking, M itigation & Protection Strategies ..........................................................
7.2.1 Tracking of Orbiting Bodies ..................................................................................
10
109
114
114
Table of Contents
115
7.2.2 Technical M itigation and Cleanup Strategies .........................................................
116
Atm ospheric Drag - N ature's Vacuum .............................................................
7.2.2.1
7.2.2.2 D e-orbiting of Space Hardware........................................................................116
116
7.2.2.3 Re-orbiting of Space H ardware ........................................................................
117
7.2.2.4 Passivation...................................................................................
117
7.2.2.5 On-orbit M aneuvering......................................................................................
117
7.2.2.6 M inimizing Release of Operational Debris.......................................................
118
7.2.2.7 Space Traffic M anagem ent ..............................................................................
118
7.2.3 Shielding ...............................................................................................................
119
7.3 Latest Space D ebris M itigation Concepts................................................................
122
7.4 Orbital Collision Exam ples.....................................................................................
7.4.1 Example #1: February 2009 Orbital Collision between Cosmos and Iridium
-.... --------........ 122
Satellites...................................................................................................124
7.4.1.1 Second-party Liability......................................................................................
124
........................................................................................
Liability
7.4.1.2 Third-party
124
7.4.1.3 Insurance Coverage..........................................................................................
7.4.2 Example #2: Chinese Anti-Satellite Incident during January of 2007.....................124
126
7.5 Conclusion .............................................................................................................
8. INTERNATIONAL & DOMESTIC U.S. SPACE POLICY
127
127
8.1 Introduction............................................................................................................
128
8.2 Background on Space Law and Space Policy..........................................................
128
8.2.1 International Space Law ...................................................................................
129
8.2.1.1 The Outer Space Treaty ................................................................................
130
8.2.1.2 The Rescue A greem ent .................................................................................
131
8.2.1.3 The Liability Convention ..............................................................................
Convention.........................................................................131
8.2.1.4 The Registration
132
8.2.1.5 The M oon Treaty ..........................................................................................
Debris....................................................132
Orbital
on
Policy
Space
International
8.2.2
8.2.3 Current U .S. Space Policy................................................................................134
139
8.2.4 Current NA SA Policy ......................................................................................
140
8.3 Advent of Com m ercial Spaceflight.........................................................................
142
8.4 Conclusion .............................................................................................................
9. POLICY DISCUSSION & CONCLUSIONS
9.1 Introduction............................................................................................................
9.1.1 Shortcomings of the Current Space Debris Policy Framework ...............................
9.1.1.1 N on-Quantifiable .............................................................................................
...........................................
9.1.1.2 Non-Enforceable
9.1.1.3 N ot Taken Seriously ........................................................................................
9.2 OBJECTIVE: New Policy Architecture Recommendations.................
9.2.1 Stakeholders and Intended Audience......................................................................
9.2.2 Antitrust Issues ......................................................................................................
9.3 Policy Architecture Analysis ..................................................................................
9.3.1 Tragedy of the Com mons.......................................................................................
9.3.2 Comparison with Common Resource and Pollution Policies ..................................
9.4 Policy Fram ework Recom mendations.....................................................................148
143
143
143
143
144
144
144
144
145
145
146
146
11
Table of Contents
9.4.1 Recommendation #1: Exhort Insurers to Adopt a Bond System .............................
9.4.2 Recommendation #2: Facilitate Debris X-Prize Competition .................................
9.4.3 Recommendation #3: Tailor an International Treaty to Meet the Needs of all
S tak eh old ers....................................................................................................................
9.4.4 Recommendation #4: Foster Research to Upgrade Debris Monitoring System.......
9.4.5 Recommendation #5: Actively Promote Mitigation & Protection Strategies...........
9.5 Conclusion and Summary of Contributions.............................................................
9.5.1 Problem Statem ent.................................................................................................
9.5.2 Thesis Question .....................................................................................................
9.5.3 Hypotheses .......................................
. . --........ ..................................................
9.5.4 Study M ethodology ...............................................................................................
9.5.5 Sum mary of Contributions.....................................................................................
9.6 Lim itations and Future Work..................................................................................
148
149
14 9
150
151
151
151
151
152
152
153
153
FINAL REMARKS
154
ASTRONAUT INJURY REFERENCES
155
SPACE POLICY REFERENCES
159
APPENDIX A: HAND INJURY PILOT STUDY EXPERIMENTAL PROTOCOL ........ 162
APPENDIX B: HAND INJURY PILOT STUDY TEST MATRIX .................................... 172
APPENDIX C: HAND INJURY PILOT STUDY DATA....................................................174
APPENDIX D: HAND INJURY PILOT STUDY CPHS APPROVAL .............................. 179
APPENDIX E: TEKSCAN VASCULAR SENSOR DATA SHEET...................................181
12
INDEX OF FIGURES
Figure 1: a) Hard upper torso (HUT) restricting motion of the glenohumeral joint b) Lateral
position of scye bearing joint for the three HUT sizes [EMU Shoulder Injury Tiger Team Report
42
p.34 (W illiam s, D . & Johnson, B., 2003)] ............................................................................
Figure 2: a) Glenohumeral joint b) Rotator cuff impingement c) Rotator cuff tear [EMU
Shoulder Injury Tiger Team Report p.2 7 (Williams, D. & Johnson, B., 2003)] ......................
43
Figure 3: Cut-away view of the planar HUT with the shoulder harness visible [Evaluationof the
44
Hard Upper Torso Shoulder Harnessp.2 (De Witt, J. D., & Jones, J. (2007)] ......................
Figure 4: The a) -335/-336 and b) -338 shoulder pad configurations used inside the
HUT (Williams, D. & Johnson, B., 2003)..............................................................................
45
Figure 5: Combination of -335/-336 and -338 padding [EMU Shoulder Injury Tiger Team Report
46
p.51 (Williams, D . & Johnson, B., 2003)] ..............................................................................
Figure 6: Hip-support assembly concept by Grant Schaffner [Evaluationof the Hard Upper
Torso Shoulder Harnessp.30 (De Witt, J. & Jones, J. 2007)]...............................................47
Figure 7: Concept testing of the Festo fluidic muscles on the morphing SUT [Development of a
Space Suit Soft Upper Torso Mobility/Sizing Actuation System with Focus on Prototype
Development and Manned Testing p.3 (Jones et al., 2007)]..................................................48
Figure 8: Measurement of the SUT with the passive cable system [Development of a Space Suit
Soft Upper Torso Mobility/Sizing Actuation System with Focus on PrototypeDevelopment and
49
Manned Testing p.11 (Jones et al., 2007)] ............................................................................
Figure 9: Example of fingernail delamination [Extravehicularmobility unit trainingsuit
symptom study reportp.13 (Strauss, S. 2004)]......................................................................
51
Figure 10: Example of fingernail delamination of a female crewmember ..............................
52
Figure 11: Examples of countermeasures for fingernail delamination [Extravehicular mobility
unit training suit symptom study report p.18 (Strauss, S. 2004)]...........................................53
Figure 12: a) Laser-scanned model of pivoted HUT b) & c) HUT overlaid on musculoskeletal
.-. ---------........ 58
m odel in SIMM ...........................................................................................
Figure 13: a) & b) Hard point locations of scye bearings from the prototype SUT overlaid on the
...... ---.. ----------............ 60
upper body model..................................................................................
Figure 14: Range of motion cone superimposed on model with ellipsoidal constraint object
............... - . --------------...................
shown ...................................................................................
62
13
Index of Figures
Figure 15: Shoulder joint torque plotted against shoulder flexion angle.................................64
Figure 16: Measured hand parameters for EMU glove sizing ...............................................
68
Figure 17: Injury distribution vs. finger-to-hand ratio...........................................................
71
Figure 18: Injury distribution vs. hand circumference...........................................................72
Figure 19: Injury distribution vs. hand width........................................................................
72
Figure 20: ROC Curve from logistic regression analysis (Area under ROC curve = 0.73).........74
Figure 21: Cumulative Fraction of right hand circumference for injured and uninjured
crew mem bers............................................................................................................................75
Figure 22: Tekscan (Boston, MA) series 4305 vascular sensor to be used inside the EMU glove
for measuring pressure distribution over the finger (with dimensions in millimeters).............79
Figure 23: Testing hardware and sensors that include the EMU glove and arm assembly,
aluminum ring that fits on hypobaric chamber seal, and Tekscan pressure sensors. ...............
80
Figure 24 a) Vascular pressure sensor positioned over middle finger b) Hand inserted into
surgical glove for ease of donning/doffing of EMU glove. ...................................................
81
Figure 25 a) EMU assembly inside hypobaric pressure chamber b) Pressure sensor on subject's
hand inside EM U arm -glove assembly ...................................................................................
82
Figure 26: Glove data recorded at the 3 pressure levels for a) relaxed & b) clasped hand.....84
Figure 27: Tekscan series 4305 vascular sensor with handle and control box (Scale indicated in
cm ) ...........................................................................................................................................
87
Figure 28: Series 4305 vascular sensor with handle and EMU comfort glove (Scale indicated in
cm ) ...........................................................................................................................................
88
Figure 29: Laser Doppler Flowmetry Probe with protective sheath.......................................88
Figure 30: Vascular sensor and LDF probe positioned on the right middle finger such that no
transducers are present on the finger tip ................................................................................
90
Figure 31: Digital countertop scale and bulb-gauge assembly of the sphygmomanometer used for
compression and gripping tests (Scale indicated in cm)........................................................91
Figure 32: Subject applies pressure to scale using the finger tip while wearing instrumentation
and the EM U com fort glove..................................................................................................
93
Figure 33: Subject demonstrating use of the sphygmomanometer assembly during the 100 mmHg
test ............................................................................................................................................
95
14
Index of Figures
Figure 34: Epidermal blood flow in the finger
-
Fingertip vs. Finger pad......
Figure 35: Pulsatile flow in the finger - Fingertip vs. Finger pad.
.......... 96
..................................
96
Figure 36: Skin compression and blood flow for different regions of the hand and middle finger
measured at no gripping (0 mmHg), moderate gripping (100 mmHg), and high gripping pressure
97
-------------...................--(200 mm H g). .......................................................................---------...
Figure 37: Hypobaric chamber (or Glovebox) at NASA's Johnson Space Center in Houston,
103
.. . . ----------------------.............................
T exas ..............................................................-------Figure 38: Subject applies pressure to the digital scale inside the glovebox with EMU gloves
. ---------------------------........................ 104
.
donned ........................................................................---Figure 39: Position of all objects surrounding the Earth as contained in the Space Command
Satellite Catalog at 0000 GMT (McNutt, 1992). Image courtesy NASA Orbital Debris Program
112
---------------........................
. ----...
O ffice .......................................................................--.......
Figure 40: The damage caused by a 0.2 mm paint fleck impact on the shuttle window during the
STS-7 mission required a $50,000 repair (McNutt, 1992) Image courtesy NASA....................113
Figure 41: Damage caused by a 1 gram Tantalum pellet that impacted six 2 mm aluminum plates
with an impact velocity of 6.54 km/sec (McDonnell Douglass Corp, 1990).............................119
Figure 42: Cubesail concept demonstrated with a nanosatellite in front of a 5x5 m deployed solar
sail (Image courtesy of engadget.com )....................................................................................121
Figure 43: Mock-up of the Iridium 33 Satellite with scale of actual satellite indicated (Image
C redit: N A SA )........................................................................................................................123
Figure 44: The Fengyun FY-IC weather Satellite with a deployed length of 10 m. The
dimensions of the hexahedron is 1.42x1.42x1.2 m (Image Courtesy: NASA)..........................125
Figure 45: Estimated growth of passenger demand for suborbital space tourism over the next
decade (extracted from SuborbitalSpace Tourism Demand Revisited (Futron, 2006)). ............ 141
Figure 46: Tekscan sensor and LDF probe placement on finger...............................................164
Figure 47: Layout of measurement and data analysis equipment .............................................
166
Figure 48: a) Contact pressure and b) blood flow for finger pad configuration.........................174
Figure 49: a) Contact pressure and b) blood flow for finger tip configuration..........................175
Figure 50: a) Pressure and b) Blood flow data for Sphygmomanometer test ............................ 175
Figure 51: Pressure Distribution over different regions of the hand .........................................
176
Figure 52: Occlusion sets in at about 240 seconds in the finger pad configuration...................176
15
Index of Figures
Figure 53: a) Pressure and b) blood flow data for astronaut subject while performing typical
E VA tasks inside the glovebox................................................................................................177
16
INDEX OF TABLES
Table 1: Sum mary of Literature Review ...............................................................................
54
Table 2: Numbers of injured and uninjured crewmembers who have complete anthropometric
69
.- . . . -----------------------.............................
data...................................................................--Table 3: Significant (p = 0.0 167) Parametric and Nonparametric Statistical Results for Fingernail
... ... 71
Injury in M ale Crew mem bers...................................................................................
Table 4: Logistic regression results for hand circumference and body mass index (BMI) .....
73
Table 5: Hand data for subjects (n=7) and crewmembers whose records are complete (n=216) .92
Table 6: Comparison between space debris mitigation, common resource and pollution
-. --......--- 147
m anagem ent policies.......................................................................................-
17
Index of Tables
LIST OF ACRONYMS AND ABBREVIATIONS
C
CAD
Computer Aided Design
CEV
Crew Exploration Vehicle
COPUOS
Committee on the Peaceful Uses of Outer Space
CPHS
Committee for the Protection of Human Subjects
E
EMR
Electronic Medical Records
EMU
Extravehicular Mobility Unit
EPSP
EVA Physiology, Systems, and Performance
ESA
European Space Agency
EVA
Extravehicular Activity
EU
European Union
F
FAA
Federal Aviation Administration
FCC
Federal Communications Commission
FFT
Fast-Fourier-Transform
G
G
Gravity
GRC
Glenn Research Center
H
H/A
Hazard Assessment
HS
Hamilton Sundstrand
19
List of Acronyms and Abbreviations
HST
Hubble Space Telescope
HUT
Hard Upper Torso
I
IRB
Internal Review Board
ILC
International Latex Corporation
ISS
International Space Station
ITU
International Telecommunications Union
ITS
Injury Tracking System
J
JAXA
Japanese Aerospace Exploration Agency
JSC
Johnson Space Center
K
kPa
Kilopascal (1 kPa = 0.1450378 psi)
L
LCVG
Liquid Cooling and Ventilation Garment
LDF
Laser-Doppler Flowmetry
M
MCP
Metacarpophalangeal
mmHg
Millimeters of Mercury
MIT
Massachusetts Institute of Technology
MVL
Man-Vehicle Laboratory
NASA
National Aeronautical and Space Administration
20
List of Acronyms and Abbreviations
NBL
Neutral Buoyancy Laboratory
NSBRI
National Space Biomedical Research Institute
psi
Pounds per Square Inch (1 psi = 6.894757 kPa)
psia
Pounds per Square Inch Absolute
R
RBC
Red Blood Cells
RSA
Russian Space Agency
SIMM
Software for Interactive Musculoskeletal Modeling
SUT
Soft Upper Torso
TMG
Thermal Micrometeoroid Garment
TRR
Technology Readiness Review
UN
United Nations
UNCOPUOS
United Nations Committee on the Peaceful Uses of Outer Space
USRA
Universities Space Research Association
U.S.
United States
UTMB
University of Texas - Medical Branch
UTHS
United Technologies Hamilton Sundstrand a
Greek Symbols
pt-g
Microgravity
21
List of Acronyms and Abbreviations
22
CHAPTER
"Space is to place as eternity is
to time."
- Joseph Joubert
INTRODUCTION
Ever
since Ed White's venture into the vacuum of space on June 3, 1965, marking the
first American spacewalk, mankind's dreams of space exploration outside the limits of
a rigid spacecraft became more tangible. When Neil Armstrong left his first bootprint
on the surface of the moon on July 20, 1969 during the Apollo 11 mission, the dream of
exploring other worlds became a reality. Integral to all of the momentous achievements of the
Gemini and Apollo programs, is the separation of astronaut and spacecraft, known as
extravehicular activity or EVA.
1.1
Background
With President Obama's new U.S. space policy on human space flight that includes sending
humans to an asteroid by 2025 and to Mars by the mid-2030s, EVA will once again play a major
role in exploration (U.S. Office of the Press Secretary, 2010). This time though, EVA will be
much more significant. Throughout the entire Apollo era, fewer than 20 EVA's were performed
in contrast to the 2000 plus EVA's that are projected for a future exploration program that would
result in a sustained presence of humans on another celestial body (Gernhardt, 2007).
Another aspect of continued advances in space exploration that is not always as readily realized
is that of space debris and orbital collisions. Throughout mankind's endeavors to explore and
conquer the heavens, we have been leaving behind hardware that seems insignificant at first, but
slowly accumulates as more companies, conglomerates, and nations join in with their own spacefaring vessels - many of which stay in orbit decades after it has reached the end of its useful life.
This growing number of old and new spacecraft being launched poses a threat to human safety in
space as well as to the Low Earth Orbit (LEO) environment as orbital collisions become more
23
Chapter 1: Introduction
prevalent. Effective regulation of decommissioned spacecraft is essential to ensure future human
and planetary safety.
1.2
EVA Injury Problem Statement & Motivation
With such an expected escalation of EVA hours, it is absolutely essential to re-assess the in-use
EVA hardware and procedures in order to minimize and preferably eliminate spacesuit trauma
that is experienced by astronauts training and performing EVA's in the current spacesuit known
as the extravehicular mobility unit or EMU.
1.2.1
EVA Training-related Shoulder Injury
The literature shows that a significant number of EVA crewmembers experience suit-induced
shoulder trauma while training in the Neutral Buoyancy Laboratory. The goal of this study is to
assess the causal mechanisms associated with the reported injury and to mitigate this through
improved suit design and enhanced training operations.
1.2.2
EVA Hand Injury
Suit-induced fingernail delamination and other injuries sustained inside the EMU glove pose a
significant threat to extended EVA's planned for long duration lunar and Mars missions. The
hand is not only the most complex geometry of the human body, but it is also used extensively
during EVA tasks. By investigating the causal mechanisms of EVA-related finger injury,
recommendations can be made for future glove designs that will provide the suited crewmember
with enhanced comfort and protection.
24
Chapter 1: Introduction
1.3
Space Policy Problem Statement & Motivation
Since the dawn of satellites in the early 1950's, space debris from intentionally exploded
spacecraft, dead satellites, and on-orbit collisions has significantly increased and currently
outnumbers operational space hardware. Adding to this phenomenon, the advent of commercial
spaceflight and the recent space activities in China and India to establish themselves as spacefairing nations are bound to accelerate the rate of space debris accumulating in low Earth orbit,
thus, exacerbating the problem. The policies regulating orbital debris were drafted in the 1960s
and 1970s and fail to effectively address the dynamic nature of the debris problem. These
policies are not legally enforced under international law and implementation is entirely
voluntary.
1.3.1
Orbital Collisions
Orbital collisions are directly linked to space debris and threaten human life, space hardware and
ultimately mission success. In an effort to better understand the complexities and incidence of
orbital collisions this thesis reviews current international space policy, legislation and mitigation
strategies in light of the past half-century of United States space flight and two recent orbital
collision episodes. The first example is the February 2009 collision between a defunct Russian
Cosmos spacecraft and a commercial Iridium satellite. The second is China's display of
technological prowess during the January 2007 intentional demolition of its inactive Fengyun- 1C
weather satellite using an SC-19 anti-satellite (ASAT) missile. In each case the stakeholders,
politics, policies, and the aftermath of the collision were analyzed and recommendations for
alternative preventative and regulatory strategies set forth.
1.3.2
Regulation of Space Debris
Space debris is a relevant issue in international space cooperation. Unless regulated, some
estimations indicate space debris will reach a point of critical density, after which point the
debris will grow exponentially, as more fragments are generated by collisions than are removed
25
Chapter 1: Introduction
by atmospheric drag. Space debris proliferation negatively impacts human spaceflight safety,
presents a hazard to orbiting space assets, and may lead to portions of near-Earth orbit becoming
inaccessible, thus limiting mission operations.
1.4
Hypotheses & Research Objectives
1.4.1
Research Objective: Engineering Section
The aim of the engineering section of this study was to investigate EVA-related injury in order to
gain a more in-depth understanding of the underlying causal mechanisms and to better realize
techniques for enhanced injury mitigation, comfort and protection.
1.4.2
Research Objective: Space Policy Section
The research aim of the space policy sections was to review current literature pertaining to the
regulation of space debris and prevention of orbital collisions and to propose possible future
policy and regulatory mechanisms for implementation.
1.4.3
Research Questions
The two main areas of injury identified are EVA training related shoulder injuries and hand
injuries sustained inside the EMU glove. Questions that are relevant to this study are:
>
Could a musculoskeletal modeling tool be developed and utilized to enhance the fit and
comfort of the space suit torso?
>
How can the suit be outfitted with sufficient comfort layers while not surrendering
mobility?
26
Chapter 1: Introduction
>
What role does finger skin blood flow, contact pressure and hand anthropometricsplay
in the incidence offingernail delamination sustainedfrom EVA operations and training
in the EMU glove?
With regard to space policy the following questions require answers:
>
How does current internationalspace law address the issue of orbitaldebris, if at all?
>
What is the official view of the United States with regardto space debris mitigation?
>
What are currentand proposed technicalmitigation strategies?
>
In the light of recent collision incidents, are these efforts successful?
>
What policy measures should be put in placefor the effective regulationof space debris?
1.4.4
o
What should be the procedurefor decommissioning old satellites/spacecraft?
o
What are the impacts on human safety and the environment?
o
What are the foreseeable consequences?
Methodology
This thesis has been divided into 4 distinct parts:
>
The development of a cursory musculoskeletal design tool for comparing different suit
concepts while optimizing comfort and mobility.
>
A statistical analysis of EVA crewmember anthropometric and injury data to investigate
possible correlations between fingernail delamination and hand size.
27
Chapter 1: Introduction
>
Experimental testing to evaluate changes in blood flow and contact pressure in the finger
tips due to compression of the skin inside the EMU glove while performing simulated
EVA tasks.
>
A detailed look at past and current policy and regulatory measures pertaining to orbital
collisions. This literature review forms the foundation of recommendations for future
space policy.
1.4.5
1.4.5.1
Hypotheses
EVA Suit Design Tool
Hypothesis 1:
The musculoskeletal design tool will enable the user to develop a spacesuit
Hard Upper Torso or HUT assembly with increasedrange of motion when
compared to the currentEMU HUT.
Hypothesis 2:
The musculoskeletal design tool will facilitateplacement of simulatedcomfort
padding andprotection that will result in a significant increase in
crewmember comfort.
1.4.5.2
Statistical Analysis
Hypothesis 3:
NASA personnel hypothesize that the crewmemberfinger-to-handlength ratio
is significantly correlatedto fingernail delamination. This thesis aims to test
this hypothesis.
Hypothesis 4:
Crewmembers with largerhand dimensions are more likely to sustain
fingernailtrauma during EVA missions and trainingsessions.
28
Chapter 1: Introduction
EVA Glove Task Study
1.4.5.3
Hypothesis 5:
A significant decrease in bloodflow is expected during grippingandpressing
tasks both in and outside of the hypobaric chamber.
Hypothesis 6:
Bloodflow occlusion effects are significantly more pronounced duringfinger
pad compression as opposed to finger tip compression.
Regulation of Space Debris
1.4.5.4
Hypothesis 7:
No clearset of spacepolicy regulationsis actively being enforced to regulate
the ownership and decommissioning of redundant orbitingspacecraft,
satellites and associateddebris.
Hypothesis 8:
A combination of technicalmitigation techniques and clear international
policy strategies/legislationis neededfor the space industry to limitfurther
debris growth.
1.5
Thesis Outline
Chapter 1 contains the introduction and problem statement of the study on EVA injury, comfort
and protection as well as the space policy problem statement pertaining to orbital collisions and
space debris.
Chapter 2 takes a historic look at shoulder injuries sustained during EVA training. Main causes
for injury and implemented countermeasures are identified. The effectiveness of current
countermeasures is discussed as well as new alternatives to the current EMU hard upper torso
(HUT). Hand injury, specifically fingernail delamination, and implemented countermeasures are
discussed.
29
Chapter 1: Introduction
In the quest of mitigating shoulder injury inside the suit, a cursory musculoskeletal model was
developed to aid in the design of new HUT's that will allow for maximum mobility while
protecting the suited astronaut from being exposed to excessive joint torques. Chapter 3
discusses the modeling strategy and implementation.
To further understand the causal mechanisms of these hand injuries, a statistical analysis was
performed to investigate possible correlations between astronaut anthropometric data and
susceptibility to fingernail delamination. The details of the analysis with its results are presented
in the first section of Chapter 4.
Results from a preliminary study in the hypobaric chamber of MIT's Man-Vehicle Laboratory
are presented in Chapter 5. The second section of Chapter 5 discusses a study that was conducted
during the summer of 2008 at NASA's Johnson Space Center, Houston TX, where skin blood
flow and contact pressure was recorded for 7 subjects. The goal of the study was to investigate
the correlation between blood flow and contact pressure inside the glove. The pilot study was
also used to validate hardware for subsequent testing on astronaut subjects to determine whether
differences in blood flow and contact pressure exists between uninjured and injured
crewmembers.
Chapter 6 contains the conclusions for both the shoulder and hand injury sections of the thesis.
The chapter summarizes the conclusions of the preceding chapters and discusses future work and
limitations.
Chapter 7 provides an introduction to space policy and presents current space treaties and
conventions that may be applied to the regulation of space debris.
Chapter 8 involves a deeper look into the topic of space debris and orbital collisions. Examples
of past collisions are considered and the relevant regulatory statuses (if any) are discussed. The
effect of debris on human safety and the environment is discussed and future policy measures for
regulating this rising concern are presented.
30
Chapter 1: Introduction
The thesis concludes with Chapter 9 that contains a discussion on the relevant debris policy
issues, briefly summarizes section II of this thesis and recommends further work that may follow
from this policy analysis.
Contributions
1.6
The following contributions are made in this thesis:
>
A cursory musculoskeletal design tool is developed that may be used to get a sense of
range of motion and comfort consideration during the initial stages of new hard upper
torso spacesuit concepts. The tool allows the user to optimize comfort and mobility
before the design leaves the digital drawing board.
>
Results of the statistical analysis of EVA crewmember anthropometric and injury data
indicate that the ratio of finger-to-hand length is not a significant contributing factor to
the onset of fingernail delamination. Hand width and hand circumference, however, were
found to be significantly associated with injury. A cut-off hand circumference value was
identified that may serve as an early warning indicator of crewmembers that may be
prone to fingernail delamination within the current EMU glove.
>
The experimental testing with blood flow and contact pressure in the finger tips serves as
a pilot study and protocol validation for ongoing research efforts at NASA's Johnson
Space Center. The study reveals correlations between blood flow and skin contact
pressure that may contribute to the onset of fingernail delamination.
>
A detailed look at past and current policy and regulatory measures pertaining to orbital
collisions, discussion thereof and recommendations of mitigation and policy strategies
that may serve as the basis for international discussion makers to formulate future space
debris policy.
31
Chapter 1: Introduction
32
SECTION
I: ENGINEERING
ANALYSIS
34
"As soon as somebody demonstrates the art of flying, settlers from our species of
man will not be lacking [on the moon and Jupiter]... Given ships or sails adapted to
the breezes of heaven, there will be those who will not shrink from even that vast
expanse."
- Johannes Kepler, letter to Galileo, 1610
35
36
CHAPTER
"To go places and do things that
have never been done before about."
that's what living is all
- Michael Collins
EVA BACKGROUND
2.1
Extravehicular
Extravehicular Activity
Activity or EVA spacesuits are a key enabling technology for space
operations, particularly during construction, maintenance and exploration missions
(Newman & Barratt, 1997). The NASA EVA suit, called the Extravehicular Mobility
Unit (EMU), is a 14 layer body-shaped enclosure pressurized with 100% oxygen at 29.6 kPa (4.3
psi) (Newman, 2000). The design of the EMU gloves is regarded as the most challenging
"softgoods" part of the suit, and developing a small tactile joint for the fingers has been
extremely challenging (Newman & Barratt, 1997; Harris, 2001; Sietzen, 1999; Scheuring et al.,
2009).
The current EMU glove is the Phase VI, which was first flown in December 1998. The Phase VI
is the successor of the 4000 series glove, and was at first custom-made for crewmembers using
hand casting, laser scanning, stereo lithography, 3D computer modeling, laser cutting and CNC
machining. According to Graziosi, these processes result in a better fit and improve comfort and
mobility in the glove compared to the 4000 series gloves. At the same time, the Phase VI gloves
can be produced faster and at lower cost (Graziosi et al., 2001). Through the years the range of
available glove sizes increased, eliminating the need to fabricate a custom glove for certain
crewmembers. When selected for an EVA mission, a crewmember is fit checked in "close-fit"
gloves that have been customized for other crewmembers. However, customizations are
performed if no adequate glove fit can be achieved. One pair of gloves will only be used for
training, while other pairs are crafted for flight use (Splawn, 2009).
As almost all EVA tasks require some form of hand function, effective suit gloves are critical to
successful EVA performance (Cadogan et al., 1993; Graziosi et al., 2001). Improvements in
37
Chapter 2: EVA Background
glove flexibility, dexterity, tactility and comfort, with a reduction in muscle fatigue and injury,
would have the greatest impact on astronaut productivity (Scheuring et al., 2007; Jones &
Schmitt, 1992; Shepherd & Lednicky, 1990). With the one to two orders of magnitude increase
in EVAs required for imminent and complex Asteroid and Mars missions, the demands on safe
and effective hand function will also increase (Viegas et al., 2004); it is therefore essential that
glove performance be improved for both Asteroid and Mars EVA missions and EVA training.
The primary NASA EVA training facility is the Neutral Buoyancy Laboratory (NBL) at Johnson
Space Center, Houston, TX, which simulates the weightless conditions of orbital operations. The
NBL is a 23.5 million liter water tank that contains full-sized mock-ups of the Space Shuttle
cargo bay, flight payloads, and the International Space Station (ISS). The spacesuit assemblies
used in the NBL are certified for training only, and accept the custom training gloves. Initial
crewmember EVA qualification, evaluation and skills training consists of -65 hours in the NBL,
while specific mission training consists on average of 11.6 hours per hour of flight EVA
(Williams & Johnson, 2003). Mission training usually starts approximately 1 year before the
scheduled spaceflight.
Despite the advances in spacesuit glove technology and fabrication, astronauts still claim that the
hardest part of any EVA is working with the hands (Chaikin, 1999). Hand dexterity, tactility,
strength and endurance are impeded because of the force required to bend the rigid, gas
pressurized materials from the neutral position (Sorenson et al., 1997; Eckart, 1996; Welsh &
Akin, 2001). In addition, the gloves are often uncomfortable to the point of pain and/or minor
physical injury to the hand: they cause calluses, abrasions, contusions, fingernail trauma, wrist
and forearm muscle stress and nerve impingements between the thumb and forefinger (Viegas et
al., 2004; Welsh & Akin, 2001; Lee, 2001; Strauss, 2004; Strauss et al., 2005). In a study of inflight EVA injuries to U.S. astronauts, 20 instances of hand injury were reported, followed by 12
to the foot (Scheuring et al., 2009).
Strauss et al., (2005) found that in 770 EVA training
sessions conducted from 2002 to 2004, 352 injury symptoms were reported. Of those, the largest
number, 47.2% were complaints about the hand, and 20.7% concerned the shoulders. Of the
hand symptoms, more than half were due to fingertip and nail contact inside the glove. During
the study period 18 astronauts required continued medical care for hand issues, 13 of which were
38
Chapter 2: EVA Background
for fingernail delamination from the nail bed (onycholysis) (Strauss et al., 2005). At least one
astronaut has had fingernails removed before an EVA mission to prevent pain, obstruction of the
fingertip by the loose/protruding nail inside the glove, and the risk of secondary bacterial or yeast
infection of the exposed bed in the moist conditions in the glove (Gernhardt, 2009). In sum,
EVA injuries have become more prominent since 2002, probably due to the unprecedented
increase in training to support construction and maintenance of the ISS (Williams & Johnson,
2003; Strauss et al., 2005).
Onycholysis or fingernail delamination is caused by axial loading of the fingernails during hard
contact with the inside of the glove when the fingers are reaching or forcefully grasping an object
(Strauss, 2004). Additional factors that may contribute to onycholysis are the local presence of
moisture (Jones et al., 2008), and reduced/occluded perfusion to the fingernail bed due to contact
pressure inside the glove. The most effective countermeasure for onycholysis as reported by
Strauss is to provide optimal glove fit. Other countermeasures are for the crewmembers to keep
their fingernails short, to apply dressings to fingertips for protection and to keep the fingers free
of moisture.
A potential mechanism of pain in the fingertip, found after EVA training or activity in some
crewmembers, is an intermittent restriction of blood in the finger tissue due to gripping and
relaxing of the hand inside the pressurized glove. This is analogous to reperfusion injury
commonly observed following organs such as the liver that have been made transiently ischemic
(Jones, 2009). Following post-ischemia reperfusion, there is capillary fluid and cellular leak,
which could result in increased interstitial fluid pressure or swelling. In a fingertip with an intact
nail, the increased tissue pressure against the rigid nail could be sensed by the pain fibers in the
nailbed, thus causing crewmember discomfort. This reperfusion induced pressure increase in the
nail matrix is hypothesized to cause the nail to detach from the nailbed, resulting in the onset of
fingernail delamination. Hyperperfusion, the term used for the fierce return of once constricted
blood to a blood-deprived in vivo tissue region is hypothesized to intensify these effects.
Beyond the glove design, a fundamental challenge to glove performance is the complexity of
joints and dimensions inherent in the hand. Recent experience and observations by NASA EVA
39
Chapter 2: EVA Background
personnel seem to support a hypothesis that crewmembers with long fingers and short palms are
more likely to sustain finger injury as they are not able to utilize muscles in the palm to close the
glove (Gernhardt, 2009). If this hypothesis is true, then crewmembers with short fingers and
larger palms may unload their finger pad pressure by grasping objects more in the palm of the
gloved hand, while subjects with longer fingers and shorter palms will require more fingertip
pressure application to surround and compress the same object. Thus a prospective study
evaluating differences in the pressure-perfusion relationship between crewmembers with varying
hand anthropometrics (finger-length-to-hand-circumference ratio, hand-length-to-circumference
ratio, etc.) is needed to better define which anthropometric and glove factors are contributory to
space suit hand injury.
A database of injury records and anthropometrics was compiled from EVA logs at NASA
Johnson Space Center and the Neutral Buoyancy Laboratory training facility (Hochstein, 2008,
Scheuring et al., 2009). Crewmember anthropometric and injury data were analyzed, exploring
the hypothesis that crewmembers with a high finger-to-hand length ratio are more likely to
experience EVA-related fingernail injuries, as early evaluation of the data suggested this trend.
In the more complete data review, this hypothesis has not been confirmed, however results show
that hand circumference may be a predictive factor for injuries in the hand. The finger length to
hand circumference ratio relationship to injury is being explored during the analysis.
2.2
Apollo Program Interview
Dr. Richard Scheuring of NASA's Johnson Space Center recently interviewed 14 of the 22
surviving Apollo crewmembers in an effort to hear firsthand their recommendations for going
back to the moon. Below is an excerpt that captures the key findings relevant to this thesis work:
"According to the Apollo lunar crews, the most fatiguing part of all surface EVA tasks was
repetitive gripping inside the glove. One crewmember stated, "Efficiency was no more than 10% of
the use of the hand" The fingernails generally tended to be pulled back resulting in separation of
the nail from the bed, or onycholysis. Additionally, the skin frequently was abraded from the top of
the knuckles. This event took on operational and potentially mission significance as several lunar
40
Chapter 2: EVA Background
walkers stated that they would not be able to work in the glove beyond the two to three EVAs they
completed due to the swelling and pain over the bony prominences of the metacarpal phalangeal
(MCP) and proximal interphalangeal (PIP) joints (knuckles), although had they been asked, it is
probably that at least one more EVA would have been possible" (Scheuring, 2007).
Another area that needs significant improvement according to the Apollo crewmembers is
mobility within the suit. This brings us to another area of injury within the suit: shoulder injury.
Shoulder Injury in Shuttle and ISS Programs
2.3
2.3.1
EVA & NBL Injury
A significant number of astronauts who undergo EVA training at the Neutral Buoyancy
Laboratory (NBL) testing facility at Johnson Space Center sustain significant shoulder injuries
that in some cases even require surgical intervention (Strauss et al., 2004). After mounting
anecdotal evidence had been raised by crewmembers, trainers and physicians, a multi-directorate
tiger team was formed that collected data, interviewed crewmembers and performed tests to
determine whether a causal relationship existed between training in the NBL and the observed
shoulder injuries (Johnson et al., 2004)
The study found that EVA training related shoulder injuries were attributed to the following six
main causes (Williams & Johnson 2003):
-
The EMIU Planar HUT design restricts normal scapulothoracic motion of the shoulder joint,
resulting in rotator cuff impingement when the arm is abducted (Figure 1)
-
Suboptimal suit fit - Only three sizes of the HUT is available, thus not all crewmembers
are accommodated in the suits and these are more prone to injury
-
Inverted body orientations of the astronauts while training inside the tank
-
Performing overhead tasks while inverted
-
The frequency of the NBL training runs - Frequent runs prevented crewmembers from
recovering completely from minor injuries, leading to more serious injuries
-
Heavy EVA training tools that are used during training sessions
41
Chapter 2: EVA Background
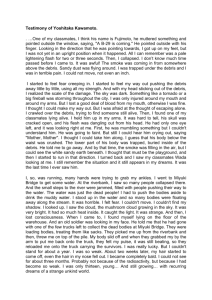
The design of the planar HUT shoulder joint is a significant factor that contributes to the risk of
EVA training-related injury. Figure 1 shows the restricted scapulothoracic motion caused by the
HUT as well as the lateral position of the scye bearing joint that gives rise to a concentrated
pressure points on the shoulder when inverted. (Williams & Johnson, 2003).
b)
Figure 1: a) Hard upper torso (HUT) restricting motion of the glenohumeral joint b) Lateral position of scye
bearing joint for the three HUT sizes [EMU Shoulder Injury Tiger Team Report p.34 (Williams, D. &
Johnson, B., 2003)]
Chapter 2: EVA Background
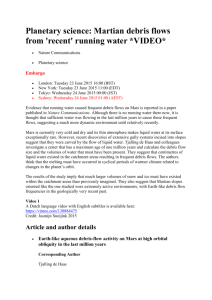
Excessive loading of the shoulder joint and repetitive overhead arm motion can lead to chronic
irritation of the rotator cuff tendon, resulting in rotator cuff tendonitis. The glenohumeral
(shoulder joint) with surrounding muscle and bone is shown in Figure 2 a). Figure 2 b) and c)
depict rotator cuff impingement and ultimate tear that occurs when no appropriate intervention
steps are taken.
I
Figure 2: a) Glenohumeral joint b) Rotator cuff impingement c) Rotator cuff tear [EMU Shoulder Injury
Tiger Team Report p.27 (Williams, D. & Johnson, B., 2003)J
2.3.2
Current Countermeasures
The current countermeasures that are used to mitigate injury sustained in the NBL are:
-
Hard Upper Torso (HUT) Shoulder Harness
-
Removable Shoulder Pads
>
Hard Upper Torso Shoulder Harness
The HUT shoulder harness incorporates Teflon strips at the shoulder regions with the purpose of
distributing the loading from the scye bearings on the crewmember's shoulders when inverted.
Figure 3 shows the placement of the shoulder harness inside the HUT.
De Witt & Jones (2007) performed a study to evaluate the effectiveness of the shoulder harness.
Their findings revealed that, although the harness reduces crewmember discomfort, it does not
Chapter 2: EVA Background
completely eliminate pain, it may affect arm range of motion, and it does not reduce total
shoulder loading, which suggests that the shoulder harness may not eliminate the incidence of
shoulder injury.
ADJUSTMENT
BRACKET
BIC ATTACHtMENT
BRACKETS
(FRONT)
ATTACHMENT
PIN (BACK)
LONG
STRAP
Figure 3: Cut-away view of the planar HUT with the shoulder harness visible [Evaluation of the Hard Upper
Torso Shoulder Harness p.2 (De Witt, J. D., & Jones, J. (2007)]
Williams and Johnson (2003) also came to a similar conclusion in addition to their observation
that many crewmembers were unaware that the harness was available as a means to alleviate the
pressure points on their shoulders. Johnson et al., (2004) states "It appears that this portion of the
suit design was given little to no thought over the years because it was deemed a crew comfort or
preference item. In fact certain items like the HUT harness had been almost erased from the
corporate memory of the program."
44
Chapter 2: EVA Background
> Removable Shoulder Pads
An alternative way to alleviate pressure points created by suit contact with the shoulder is the
addition of padding inside the shoulder region of the HUT (See Figure 4 and Figure 5). These
mosite pads are fitted with Teflon inserts and stitched to the LCVG.
a)
b)
Figure 4: The a) -335/-336 and b) -338 shoulder pad configurations used inside the HUT(Wiliams, D. &
Johnson, B., 2003)
45
Chapter 2: EVA Background
Figure 5: Combination of -335/-336 and -338 padding [EMU Shoulder Injury Tiger Team Reportp.51
(Williams, D. & Johnson, B., 2003)1
As in the case of the shoulder harness, these padding configurations are used to relieve pressure
points and to position the crewmember's upper torso inside the suit.
Williams and Johnson (2003) reported that a combination of the shoulder harness and various
pad configurations could be effective in reducing the loading of the scye bearing joint on the
crewmember's shoulders, but that no single combination of the harness and pads would work for
the entire astronaut population. Additional modifications to these countermeasures were
suggested but on the condition that it does not impair donning, doffing and range of motion in
the suit.
2.3.3
Proposed Countermeasures
Two proposed countermeasures are considered:
-
Hip-support assembly
-
Soft upper torso (SUT) concept
Chapter 2: EVA Background
>
Hip-Support Assembly
A hip-support assembly concept is mentioned by De Witt & Jones (2007) as a potential method
to help reduce shoulder joint injury. The assembly can be incorporated in a NBL training suit to
reduce loading on the shoulders during inverted tasks under water (see Figure 6). The problems
experienced with shoulder injuries inside the NBL are due to the presence of gravity and the hipsupport assembly would therefore only be needed inside the tank and not during actual EVA's.
'7
Figure 6: Hip-support assembly concept by Grant Schaffner [Evaluation of the Hard Upper Torso Shoulder
Harnessp.3 0 (De Witt, J. & Jones, J. 2007)]
> Soft Upper Torso (SUT)
The state of the art in spacesuit pressure garment technology is the soft upper torso (SUT). The
SUT is non-rigid and by incorporating actuators into the design, it can be altered in real time to
change the angle of the scye bearings, thus enhancing mobility inside the suit. (Jones et al.,
2007).
Chapter 2: EVA Background
This technology might help in alleviating shoulder injuries as it is a morphing upper torso as
compared to the rigid shape of the current HUT. The ability to change the location of the scye
bearings also makes it an attractive alternative to the HUT as more crewmembers can be
accommodated with fewer suit sizes (Jones et al., 2007).
Figure 7 and Figure 8 show the Festo fluidic muscle actuator and the passive cable system
respectively that are utilized to change the shape of the SUT and thus the position and orientation
of the scye bearings.
Figure 7: Concept testing of the Festo fluidic muscles on the morphing SUT [Development of a Space Suit Soft
Upper Torso Mobility/Sizing Actuation System with Focus on Prototype Development and Manned Testing p.3
(Jones et al., 2007)].
48
Chapter 2: EVA Background
Figure 8: Measurement of the SUT with the passive cable system [Development of a Space Suit Soft Upper
Torso Mobility/Sizing Actuation System with Focus on Prototype Development and Manned Testing p.11 (Jones
et aL, 2007)].
2.4
EVA Hand Injury
A spacesuit injury symptom study conducted by Strauss et al., (2004) indicates that hand injury
and more specifically fingernail delamination (onycholysis) is by far the most common injury
reported among astronauts training in the NBL and performing EVA tasks.
The EMU glove is arguably the most complex and most critical component of the entire suit.
Twenty two Apollo-era astronauts, when interviewed recently, made a consensus statement that
of all the future improvements in the EMU suit improving the glove is the most important
(Scheuring et al., 2007). Design engineers are faced with the nontrivial task of designing gloves
that approximate Earth-normal use of the hand in terms of flexibility, dexterity and fit, while
protecting the crewmembers from the harsh vacuum environment of space.
Chapter 2: EVA Background
2.4.1
Hand Injury in Spacesuit Gloves - Literature Review
The spacesuit glove is the medium through which the astronaut manipulates the space
environment around him/her. For this reason gloves with high dexterity are essential for
successful EVAs as virtually all EVA tasks require some degree of hand function. (Cadogan et
al., 1993; Graziosi et al., 2001).
According to Gemini astronauts that got to use the first U.S.-made gloves during EVA's, these
were "as stiff as the cast on a broken arm", and could not be satisfactorily improved for the
Apollo program (Cernan & Davis, 1999). Chaikin reports that the EMU gloves used during the
Apollo era caused intense soreness and fatigue in the forearm muscles after only several hours of
EVA (Chaikin, 1998).
The Phase 6 EMU gloves in use today are preferable to the 4000 series, and wrist torques are
lower, but they are still known to be highly fatiguing and a severe hindrance to normal function
(Graziosi et al., 2001; Cadogan & Graziosi, 1996; Harris, 2001). Existing EVA gloves
significantly reduce hand dexterity, range of motion, tactility, strength and endurance. In
addition, they are often uncomfortable to the point of pain and/or minor physical injury to the
hand (Welsh & Akin, 2001).
A key contributor to hand injury in the glove is its stiffness due to pressure - similar in concept
to a long inflatable balloon that resists bending motion around a lateral axis. The pressureinduced rigidity of the glove causes sensory degradation and reduces dexterity, strength and
endurance compared to the naked hand (Eckart, 1996). Sorenson adds that finger and hand
articulation is impeded because of the required force to bend the rigid, gas-pressurized materials
from the neutral position (Sorenson et al., 1997).
Hand injury is not only constrained to U.S. gloves. Russian cosmonauts have suffered hand
bruising and painful abrasions from gloves as well (Dionne, 1994). Like their U.S. counterparts,
"the Russians have achieved no great breakthroughs in EVA glove design, although they realize
that glove design is paramount." (Harris, 2001, p. 311). Cosmonauts have reported great
50
Chapter 2: EVA Background
difficulty in using tools, especially the URI, which is a universal hand-operated power tool and
the most commonly used during EVA (Newman & Barratt, 1997).
When considering future glove developments, improvements in glove flexibility, dexterity,
tactility and comfort, with a reduction in muscle fatigue and abrasion-induced injury, would have
the greatest impact on astronaut productivity (Jones & Schmitt, 1992; Shepherd & Lednicky,
1990). With the expected increase in EVA and future human planetary exploration, it is therefore
essential that EVA glove design be improved to allow better hand performance. The design of
the gloves, however, is the hardest engineering challenge of the suit (Newman & Barratt, 1997).
2.4.2
Fingernail Delamination Incidence
Strauss et al., (2004) performed a suit symptom study showing that fingernail delamination or
onycholysis is experienced by crewmembers due to axial loading of the fingernails when the
gloved hand is closed repeatedly to grasp an object. An additional factor that leads to
onycholysis is the presence of moisture inside the comfort gloves. Figure 9 and Figure 10 show
the delaminated fingernails of an injured male and female crewmember, respectively.
Figure 9: Example of fingernail delamination [Extravehicular mobility unit training suit symptom study report
p.13 (Strauss, S. 2004)]
Chapter 2: EVA Background
Figure 10: Example of fingernail delamination of a female crewmember
Fingertip pain was attributed to hard contact to the fingertips with extended reaching and forceful
grasping. Other hand injuries that were reported include superficial abrasions, contusions, and
nerve impingements (Strauss et al., 2004).
2.4.3
Hand Injury Countermeasures
The most effective countermeasure for onycholysis as reported in this suit symptom study is to
provide optimal glove fit. Other countermeasures are for the crewmembers to keep their
fingernails short and to apply dressings to fingertips for protection and to keep the fingers free of
moisture. The following types of dressings are used by crewmembers:
52
-
DERMABONDTM topical skin adhesive (New Brunswick, NJ)
-
TegadermTM (St. Paul, MN)
-
Band-Aid® (Langhorne, PA)
-
Medfix Moleskin adhesive bandage (Indianapolis, IN)
Chapter 2: EVA Background
Figure 11 shows examples of dressing that are used by crewmembers to counteract the onset of
fingernail delamination and contact- and compression injuries.
Figure 11: Examples of countermeasures for fingernail delamination [Extravehicular mobility unit training suit
symptom study report p.18 (Strauss, S. 2004)]
2.5
Conclusion
A variety of factors including the design of the planar HUT, suit fit, inverted body orientations,
and NBL training procedures contribute to restricted scapulothoracic motion that results in EVA
related shoulder injury.
Although all current countermeasures reduce the effects of point loading on the shoulders, these
are only temporary solutions to an underlying problem - the scye bearing impinging on the
rotator cuff. This results in restricted range of motion and excessive loading on the shoulder joint
during EVA.
By optimizing the suit crewmember's range of motion while preventing point loading from the
scye bearings, this problem could be solved before rather than after injury occurs. This is the
rationale behind the development of the musculoskeletal model tool for design the next
generation HUT, which is discussed in the following chapter.
Chapter 2: EVA Background
Current gloves are not adequately designed for comfort and protection. Improving the spacesuit
glove for future EVA's is considered of paramount importance by most references. Fingernail
delamination is caused by axial loading of the fingertips during repetitive gripping inside the
glove. On-the-fly countermeasures have been devised but are not sufficient in completely
removing the risk of injury and only serve as a temporary solution that does not address the
underlying problems. An enhanced glove design would therefore be required.
Table 1 shows a summary of the literature review on spacesuit glove-related injury. References
are listed for each topic with the respective data sources shown. The gaps in the literature are
shown and the area where this thesis work is contributing is indicated.
Table 1: Summa
y
of Literature Review
Gemini, Apollo
Series 4000
Current Phase VI
Russian Orlan
Program Glove
Glove
EMU Glove
Glove
Issues
Reported
with Glove
Scheuring, 2007;
Newman & Barratt,
1997; Harris, 2001;
Sietzen, 1999;
Scheuring et al.,
2009; Cernan &
Davis, 1999
Williams &
Johnson, 2003;
Strauss et al.,
2005; Viegas et
al., 2004;
Welsh & Akin,
2001; Lee,
2001; Strauss,
2004; Strauss et
al., 2005
Graziosi et al, 2001;
Cadogan & Graziosi,
1996; Harris, 2001;
Williams & Johnson,
2003; Strauss et al.,
2005; Scheuring et
al., 2009; Jones &
Schmitt, 1992;
Shepherd &
Lednicky, 1990;
Data Source
Interviews with
astronauts; JSC
medical records
Scheuring, 2007
Welsh & Akin, 2001
Cause of
NBL injury
records, post
flight briefings
Jones et al.,
2008
Technique
Used in this
-
thesis
Countermeasures2005;Scheur
54
Strauss, 2004
_______
NBL injury records,
post flight briefings
-
Contribution of this
-
Graziosiet
thesis
Statistical Analysis;
Experimental
Williams&JohnsonBa7Testing
Scheuring, 2007
Dionne,1994
Harris, 2001;
Newman &
Barratt, 1997
GeShardt, 2009
-
CHAPTER
3-
"Never fly the 'A' model of
anything."
Ed Thompson
MUSCULOSKELETAL DESIGN TOOL
3.1
Design Tool Development
One
of the core considerations for designing a new spacesuit for NASA's future
planetary exploration efforts is that of comfort and injury prevention. Shoulder injury
sustained in the suit is only surpassed by hand injury in its prevalence amongst
crewmembers training in the NBL and in some cases even requires surgical intervention (Strauss
et al., 2005, Williams and Johnson, 2003). These shoulder injuries are primarily caused by
contact between the shoulder and the HUT scye bearings during inverted training regimes.
During these inverted regimes crewmembers are upside down while performing simulated EVA
tasks inside the NBL water tank. They are inverted due to limited space to work inside the tank,
especially when working around large ISS and shuttle mockups. Though neutrally buoyant,
gravity is still present, resulting in the majority of the crewmembers' body weight pressing down
on their shoulders that in turn press into the scye bearings.
A cursory musculoskeletal model has been developed to analyze and compare the effects of scye
bearing placement on shoulder range of motion and shoulder torque to see how this influences
comfort and possible injury. The model enables the user to import different HUT designs into the
modeling environment, to scale the human torso and HUT model relative to each other, and then
to determined how scye bearing orientation influences range of motion and joint torque. Thus the
user can identify the optimum scye bearing size and orientation that maximizes range of motion
and crewmember comfort.
The torque and range of motion analysis is done using SIMM (Software for Interactive
Musculoskeletal Modeling, Santa Rosa, CA). Differences in the design of previous, current and
55
Chapter 3: Musculoskeletal Design Tool
future upper torso suit models can be considered for the joint torque and range of motion
analysis. In analyzing the HUT design, contact with hard points inside the suit can be identified
and the influence of added protective padding on the range of motion can be assessed, thus
aiding in optimal placement of the padding.
3.1.1
Musculoskeletal Modeling in SIMM
The goal of the modeling and simulation section of the project is to create a tool to evaluate how
different upper torso bearing configurations influence the range of motion of a crewmember
inside the suit. The model also considers the torque experienced at the shoulder joint while
performing certain motions. This range of motion vector combined with the shoulder joint torque
forms what is referred to as the comfort envelope.
The comfort envelope can be defined as a cone-shaped volume surrounding the suited astronaut's
shoulder and upper arm that encompasses all possible reach locations for the elbow in which the
astronaut can comfortably do work. Comfort can be quantified by combining the torque required in
the shoulder joint to reach a certain location in the comfort envelope with a metric of acceptable
contact force. In other words, the comfort envelope will include all reachable points that do not
require excessive torques nor result in concentrated loading due to contact with hard points in the
suit.
3.1.2
Modeling Strategy
The upper extremity model that is used for this analysis was developed at Stanford University
(Holzbaur et al., 2005). The model contains 15 degrees of freedom that includes the kinematics
of the shoulder, elbow, forearm wrist, thumb, and index finger. It models the strength of a young,
adult male (1.8m tall) and experimental data was used to develop the 50 muscle-tendon
actuators.
A kinematic approach is followed to determine the range of motion of the shoulder joint while
the upper extremity model is suited with the HUT model. Contact between the humerus/clavicle
56
Chapter 3: Musculoskeletal Design Tool
bones and the scye bearing hard points of the HUT is recorded while the arm of the model is
maneuvered in the space confined by the scye bearing interacting with the humerus. These
contact regions determine the boundary for the cone-shaped volume that will form the basis of
the comfort envelope.
3.1.3
Hard Upper Torso Modeling
The CAD models of the planar HUT, pivoted HUT and prototype Soft Upper Torso (SUT)
obtained from ILC Dover are converted to object file format in order to import the geometries
into the SIMM environment. It is recommended that the HUT model should be as simple as
possible. Laser-scanned models require too many resources when used in SIMM. Ideally only
the scye bearing rings, neck- and waist ring should be included.
Figure 12 a) depicts a laser-scanned model of the pivoted HUT. The complexity of the scanned
geometries may prove to be difficult to import into the SIMM environment and a simplified
version of the HUT is required. Figure 12 b) and c) show the simplified HUT overlaid on the
model. Muscles are visualized by their lines of action connected between the muscle contact
points i.e. thin red lines in the SIMM environment as shown in the figures.
57
Chapter 3: Musculoskeletal Design Tool
a)
b)
c)
Figure 12: a) Laser-scanned model of pivoted HUT b) & c) HUT overlaid on musculoskeletal model in SIMM
Any high-end CAD software can be used to save the CAD file in either object (OBJ) or DXF file
format. The OBJ file can then be converted to ASCII format prior to importing to the SIMM
environment. A SIMM utility program called S-norm was used to convert the file. The program
is run in an MS DOS window and the command for conversion is:
58
Chapter 3: Musculoskeletal Design Tool
norm <HUT Model Name>.obj <Converted HUT Model Name>.asc -tol 0.00001
The "-tol 0.00001" option removes nearly-coincident vertices, with the result of merging the 30
pieces of the suit into one polyhedron. Visualization of the shading in SIMM is greatly enhanced
when the pieces are merged.
Once the HUT model is converted, it can be saved in SIMM's bone directory. The software
considers the HUT as yet another 'bone' to be included in the model by use of the Bone Editor
tool. Its color and material properties can be changed by opening the ASCII file while its visual
presentation in the SIMM environment can be altered by using the Model Viewer window
(SIMM 4.0 User manual, 2004). The HUT can be rotated, translated and scaled relative to the
upper extremity model by use of the Bone Editor tool. Constraints or hard-stops on the scye
bearings are created by superimposing cylindrical or ellipsoidal constraint geometries on the
HUT by using the Constraint Editor tool. Figure 14, presented towards the end of this chapter,
depicts such an ellipsoidal constraint for the neck opening of the SUT model.
Once a HUT model is positioned over the musculoskeletal model, constraint surfaces are added
at the location of the suit hard points to simulate contact surfaces for constraining the motion of
the arm. These objects could also be used to represent additional padding inside the HUT that
would affect range of motion.
With the constraint areas specified the model arm can then be moved within the scye and the
resulting range of motion cone can be created by recording the position of the elbow joint for all
possible orientations that do not result in the humerus bone touching the scye bearing.
The prototype SUT hard points are shown in Figure 13. The scye bearings are shown at the level
of the shoulder joint and the green disk that intersects the ribcage represents the base of the SUT.
The green disk at the top represents the plane where the helmet attaches to the SUT. The
allowable range of motion of the arm is obtained by changing the respective joint degree-offreedom angles and recording arm orientation where contact with the scye bearing occurs.
59
Chapter 3: Musculoskeletal Design Tool
a)
b)
Figure 13: a) & b) Hard point locations of scye bearings from the prototype SUT overlaid on the upper body model
60
Chapter 3: Musculoskeletal Design Tool
SIMM's plot maker tool can subsequently be used to plot range of motion and shoulder joint
torque for any allowable model arm orientation to be compared to that of other HUT designs.
3.1.4
Assumptions and Model Limitations
In order to model the comfort envelope, a number of assumptions have to be made and
limitations identified:
1.
SIMM is not designed for modeling skin or tissue contact. Contact is therefore
assumed to occur when a bone touches a hard point. This is considered to be the
extreme case as discomfort would be experienced before the bone touches the hard
point, i.e. when muscle or skin is pressing against a hard point. By including a
reduction factor in the resulting reach envelope this approximation can be
compensated for.
2.
The thorax in the model has no muscles and is connected to ground as a rigid body, as
is the case with the imported HUT/SUT model. This implies that only the shoulder
joint and the rest of the arm is free to move with respect to the HUT, resulting in less
mobility than would be the case if a suited human subject reaches. Though the thorax
does not move, the movement of the scapula over the ribcage is modeled accurately
to give a realistic representation of human shoulder movement.
3.
The model kinematics includes joint limits but is not limited to anthropometric torque
limits. This implies that the final comfort envelope may be smaller than that
calculated with SIMM due to the removal of reach positions resulting in excessive
torque.
4.
The HUT models obtained from ILC Dover are for large HUT's and the SIMM
musculoskeletal model is that of a 1.8m tall male. Both of these could be scaled
61
Chapter 3: Musculoskeletal Design Tool
relative to each other when analyzing optimal suit fit for the entire astronaut
population.
Soft padding cannot be modeled in SIMM. Its influence on the range of motion can
5.
be assessed by inserting geometries that represent the compressed pads over the body.
3.2
Comfort Envelope
3.2.1
Range of Motion
Figure 14 shows the red path line of the elbow joint that coincides with the allowable range of
motion of the arm. Also shown is the ellipsoidal constraint geometry representing the neck
opening hard-stop.
Figure 14: Range of motion cone superimposed on model with ellipsoidal constraint object shown
62
Chapter 3: Musculoskeletal Design Tool
3.2.2
Joint Torque Calculations
Each joint's torque is calculated from the input joint angles by making use of the inverse
dynamic equations. The scye bearing hard points are modeled as constraints to ensure that the
arm is confined to the scye bearing opening throughout the motion.
The graph in Figure 15 shows the resulting shoulder torque that is a combination of torques
generated by all the different muscle groups of the shoulder joint for the entire range of shoulder
flexion angle.
63
Chapter 3: Musculoskeletal Design Tool
Shoulder Torque Data
80
75
70
E
0
65
60
0
-3
0n
50
60
80
100
120
140
Elevation Angle (deg)
Figure 15: Shoulder joint torque plotted against shoulder flexion angle
3.3
Conclusion
A cursory musculoskeletal model was developed to aid in optimizing future HUT designs while
considering range of motion and joint torque. The model has limited application as it cannot
Chapter 3: Musculoskeletal Design Tool
model skin and tissue contact between the HUT and the suited subject. The thorax of the model
is connected to ground and exhibits less freedom of movement than an actual suited subject. The
modeling strategy followed is a kinematic approach that makes use of the inverse dynamics
equations to calculate joint torques with arm orientation as input. The musculoskeletal model has
an integrated physics-based joint torque calculator that facilitates a quantitative analysis. The
results may serve as input for spacesuit designers' concept refinement processes.
Limitations and Future Work
3.4
-
The current model includes a 3D skeletal structure and a model of the Hard Upper
Torso. Muscles are presented through action lines and are not accurately portrayed in
either shape or volume. Skin is not modeled and contact between the humerus and
HUT only occurs when the bone intersects the HUT hard stop. By including a
cylinder around the humerus the arm volume may be approximated. Future work
could involve improving the software to include a skin model and foam insert models
that deform when contacting a solid object such as a HUT scye bearing.
-
Model validation is necessary and may be achieved by comparing the resulting joint
torques to values obtained from actual spacesuit data. A further method of refinement
may involve comparison between results from the model and average human joint
torques documented for ergonomic design purposes. This would enable the user to
determine whether a specific HUT design would cause the crewmember to exert
excessive joint torques while reaching.
-
The current model is optimized for a large male body structure. The model may be
expanded to include
5 th
percentile female up to
9 5th
percentile male crewmembers,
thus allowing it to be applied to for suit range of motion optimization for the entire
astronaut corps.
65
Chapter 3: Musculoskeletal Design Tool
66
CHAPTER
"He uses statistics as a drunken
man uses lampposts-for support
rather than for illumination."
- Andrew Lang
STATISTICAL ANALYSIS OF EVA
HAND INJURY DATA
4.1
Background - Metric Predictive Study
Collaboration
with NASA personnel at Johnson Space Center provided access to
astronaut anthropometric data as well as hand injury data for the entire astronaut
population. Using this data, a statistical analysis was performed to investigate possible
correlations between crewmember hand dimensions and the crewmember's susceptibility to
fingernail delamination.
Correspondence with Dr. Mike Gernhardt, who is leading the EVA Physiology System and
Performance Project team at NASA's Johnson Space Center, Houston, confirmed his hypothesis
that astronauts with long fingers and short palm lengths are more susceptible to injury (i.e., their
hand-to-finger ratio is smaller than that of the average crewmember.). An idea proposed for
glove enhancement is for the next generation spacesuit gloves to be designed to assist the fingers
in closing the hand when gripping objects. The palm section of the glove would extend over the
base of the fingers so that the fingers of the glove are shorter than the fingers of the crewmember
- resembling a mitten with short, stubby fingers. This could result in the hand muscles assisting
the finger muscles during grasping tasks. Furthermore, the Russian Orlan glove is designed
somewhat in this fashion and this may be the reason why astronauts who trained with both the
EMU and Orlan gloves experienced discomfort and pain in the EMU glove.
67
Chapter 4: Statistical Analysis of EVA Hand Injury Data
4.2
Statistical Analysis of Crewmember Hand Data
Injury data was collected from the Injury Tracking System (ITS) at NASA Johnson Space Center
(JSC).
This database, recently compiled by Wyle Laboratories (Houston, TX) from several
existing medical logs, is the most comprehensive injury archive for U.S. astronauts (Hochstein,
2008). ITS data sources include JSC EVA logs, NBL training reports, flight surgeon records in
the Electronic Medical Records (EMR) during ISS and Space Shuttle missions, and from other
NASA or NASA-sponsored physiologic research projects. Anthropometric data was obtained
from JSC sizing measurements taken during the custom glove fitting process for each hand. A
NASA flight surgeon reviewed the ITS for completeness and accuracy, recorded the
anthropometric data to each subject, and anonymized the archive before release.
Figure 16
shows the 22 hand parameters recorded for each hand of each astronaut in that process, which
were combined with subject height and weight to form the complete individual anthropometric
variables included in this study. The finger-to-hand ratio is the length of the lateral side of the
middle finger [metric 12] divided by the total hand length [metric 22].
2120
Figure 16: Measured hand parameters for EMU glove sizing
68
Chapter 4: Statistical Analysis of EVA Hand Injury Data
A total of 192 male and 40 female crewmembers have complete injury- and anthropometric
records. Among them, 20 males (10.4%) and 2 females (5.0%) showed at least one instance of
fingernail delamination. Table 2 shows the composition of the two cohorts.
Table 2: Numbers of injured and uninjured crewmembers who have complete anthropometric data
%
Uninjured
Injured
Handedness
Gender
Injured
crew
crew
Male right hand (MRH)
Male left hand (MLH)
Male unknown hand (MXH)
M
M
M
Male fingernail delamination (DELAM M)
M
Female right hand (FRH)
Female left hand (FLH)
Female unknown hand (FXH)
F
F
F
Female fingernail delamination (DELAM F)
TOTAL
Right
Left
Unknown
Right
Left
Unknown
16
3
1
141
16
15
10.2
15.8
6.3
20
172
10.4
1
0
1
27
6
5
3.6
0.0
16.7
F
2
38
5.0
M&F
22
210
9.5
Several statistical tests were performed using SYSTAT 12 software (Systat Software Inc., San
Datasets were formed for the left and right hands from all subjects for each
anthropometric metric and the finger-to-hand ratio, and further divided into injured and
Jose, CA).
uninjured (or control) sub-groups. As the number of female crewmembers and injuries was too
small to support reliable analysis, only the male population was considered. We found no
difference between the results for right-handed male crewmembers and for the average of all
male crewmembers. Our analysis focused on the right-handed male crewmembers, as this
constitutes the largest group of subjects.
Before the experiment we expected that hand length, hand circumference, and finger-to-hand
ratio would be most closely related to delamination. Therefore, to insure a family significance
level of 0.05, we applied a Bonferroni correction that requires p < 0.05/3 = 0.0167 separately for
each measure.
If the distributions of a measure, injured and uninjured, were consistent with a normal
distribution (1-sample Kolmogorov-Smirnov (KS) test) we applied a 2-sample t-test. Otherwise,
we applied a Kruskal-Wallis (KW, i.e. the Mann-Whitney test in this special case of one degree
of freedom) test. It is also possible to have significant differences between (e.g., variances of) the
injured and control subgroups even if their means are identical. The 2-sample Kolmogorov-
69
Chapter 4: Statistical Analysis of EVA Hand Injury Data
Smirnov (KS) nonparametric test was applied to rule out anomalies arising from differences in
the distributions of the injured and control groups.
A multivariate logistic regression analysis and receiver operating characteristic (ROC) analysis
was performed to assess the contributions of these independent variables as predictors of a
"not/injured" (0/1) outcome. A standard significance level of p < 0.05 was used for the
regression analysis.
A cumulative fraction plot was generated to identify possible cut-off values of relevant
anthropometric parameters that relate to higher probability of finger injury. The cut-off point
may be used during glove fitting for new crewmembers to identify individuals with a high
probability of injury.
4.3
Results
Single results are considered significant if p < 0.0167, with results shown as p = left hand, right
hand. Two measurements (denoted by number as shown in Figure 16) were not rejected by the
KS
test of normality:
distance between
proximal
interphalangeal
thumb joint and
metacarpophalangeal (MCP) joint [4] and finger-to-hand ratio [12/221. No measurements were
found to have significantly different means under the 2-sample t-test as between the injured and
control sub-groups. The finger-to-hand ratio showed no significant difference (p = 0.80, 0.99).
After Bonferroni correction there were no significant control/delaminated differences in
distribution on the 2-sample KS test for the remaining metrics. The KW test (which does not
presume normal distributions) indicated a significant effect of hand circumference [21] (p =
0.009, 0.007) and hand width [20] (p
=
0.02, 0.01) for both hands and left ring finger
circumference [14] at the distal interphalangeal (DIP) joint (p = 0.002, 0.04), on the Bonferronicorrected p < 0.0167 criterion.
Table 3 summarizes the significant results. Figure 17 through Figure 19 show the injury
Chapter 4: Statistical Analysis of EVA Hand Injury Data
distributions for finger-to-hand ratio, hand circumference, and hand width, respectively.
Table 3: Significant (p = 0.0167) Parametric and Nonparametric Statistical Results for Fingernail Injury in
Male Crewmembers
Kruskal-Wallis
#
Two sample t-test Two sample KolmogorovHand Parameter
Smirnov
Left
Right
Left
Right
Left
Right
A Priori
Hand circumference
21
-
-
0.111
0.054
0.009
0.007
Hand width
20
-
-
0.103
0.106
0.021
0.010
Total hand length
22
0.341
-
0.721
0.061
0.293
0.061
12/22
0.801
0.993
0.338
0.402
0.480
0.513
Right Middle Finger Circ (DIP)
R10
-
-
-
0.243
-
0.046
Left Middle Finger Circ (PIP)
L11
-
-
0.154
-
0.030
-
Ring Finger Circ (DIP)
14
-
-
0.037
0.031
0.002
0.042
Ring Finger Circ (PIP)
15
-
-
0.208
0.170
0.052
0.037
R18
-
-
-
0.225
-
0.025
0.55
40 L0.35
Finger-to-hand ratio
ccidentals
Right Little Finger Circ (DIP)
40
30
4W
0
20
10
0
10
30.3
0.35
0.40
0.45
0.50
Left Finger-to-Hand Ratio
0.40
0.45
0.50
Right Finger-to-Hand Ratio
Figure 17: Injury distribution vs. finger-to-hand ratio
0.55
Chapter 4: Statistical Analysis of EVA Hand Injury Data
Uninjured
Injured
L21
9
8
7
8
1(
Left Hand Circumference (Inches)
9
Right Hand Circumference (Inches)
Figure 18: Injury distribution vs. hand circumference
40
1
30 -
Uninjt
Uninjured
20 -
10 0
10-
Injured
Injurj
20 R20
L20
30 40
2.5
3.0
3.5
4.0
Left Hand Width (inches)
2.5
3.0
3.5
4.0
Right Hand Width (Inches)
Figure 19: Injury distribution vs. hand width
4.
Chapter 4: Statistical Analysis of EVA Hand Injury Data
Upon observing the marginal significance of height and weight we investigated further by
subjecting the body mass index (BMI) of each crewmember to the two sample t-test. The body
mass index is given as
BMJ
=
weight(lb)
height2 (in 2 ) x 2.2 x 0.02542
The BMI is given in SI units and calculated from imperial units by dividing by 2.2 for pounds
and 0.02542 for inches squared.
Table 4 contains the results of the logistic regression analysis and Figure 20 shows the ROC
density curve with a maximum area under the curve of 0.73. While hand circumference is the
dominant variable, adding BMI to the model increases the area under the (ROC) curve slightly.
Table 4: Logistic regression results for hand circumference and body mass index (BMI)
Parameter
Constant
Hand Circumference (R21)
Body Mass Index
=
weight
(lb) x
Estimate
Standard Error
Z
p-Value
-13.637
1.890
-0.206
5.339
0.645
0.135
-2.554
2.928
-1.523
0.011
0.003
0.128
703 / height2 (in2)
73
Chapter 4: Statistical Analysis of EVA Hand Injury Data
Receiver Operating Characteristic Curve
1.0
0.8
0.6
0i.4
0.2
0.0-'
0.0
0.2
0.4
0.6
0.8
1.0
1-Specificity
Figure 20: ROC Curve from logistic regression analysis (Area under ROC curve = 0.73)
Younger crewmember age seemed to increase the area of the ROC curve as well, implying that
younger astronauts are more susceptible to injury - a suspicious result. Our data on age was
doubtful perhaps because records of the older astronauts may not have been obtained through the
same measures and protocols that are currently in use.
The result of the cumulative fraction analysis is presented in Figure 21. The graph shows that
more than 50% of all delamination cases are reported for hand circumferences > 22.86 cm (9 in)
and an increasing fraction of the crewmembers with hand circumferences larger than 20.32 cm (8
in) are injured.
74
Chapter 4: Statistical Analysis of EVA Hand Injury Data
1.0-
0.8-
0
Injured
m
Uninjured
El
E
C
0
13
4-J
E
0.6U-
El
EE
0.4
-
0.2 -
0.01
6
El
7
8
9
10
Right Hand Circumference (inches)
Figure 21: Cumulative Fraction of right hand circumference for injured and uninjured crewmembers
4.4
Discussion
Effective gloves are critical to successful EVA performance (Cadogan et al., 1993; Graziosi et
al., 2001). Improvements in glove flexibility, dexterity, tactility and comfort, with a reduction in
muscle fatigue and injury, will therefore have great impact on astronaut productivity (Scheuring,
2007; Jones & Schmitt, 1992; Shepherd & Lednicky, 1990). With the expected dramatic increase
in EVAs required for imminent planetary exploration missions, the demands on safe and
effective hand function will also increase (Viegas, 2004).
Nevertheless, EVA injuries have
actually become more prominent since 2002, probably due to the unprecedented increase in
training to support construction and maintenance of the ISS (Williams, 2003; Strauss, 2005). It is
therefore essential that new studies and protocols be applied to address the high incidence of
onycholysis injuries among astronauts..
We found no significant difference in the number of cases of onycholysis between short and long
Chapter 4: Statistical Analysis of EVA Hand Injury Data
handed astronauts in our sample. Our original hypothesis based on finger length was not
sustained by the data, but several hand anthropometrics based on width and circumference have
been found to be significantly different as between injured and uninjured groups in our sample.
The most significant anthropometric factor in injury prevalence is hand circumference. The KW
test found the magnitude of (right, left) hand circumference is significantly greater p = (0.009,
0.007) for the injured astronauts in our sample than for the uninjured. The 2-sample KS test
found (marginally) no significant difference between injured and uninjured distributions. Table 3
shows the KW and KS results and Figure 18 clearly shows that the injured sample has larger
hand circumferences. It is reassuring that both hands give the same significant result.
The cumulative fraction analysis shows that crewmembers with a hand circumference of 22.86
cm (9 in) or above are almost four times more likely to be injured as those below 22.86 cm (9
in), with injury rates of 19.6% (11 out of 56) and 5.7% (9 out of 157) respectively. The injury
rate for female crewmembers in ITS is low (5.0%), which is consistent with the low rate for male
crewmembers with comparable hand circumference.
Our logistic regression suggests that large hand circumference is the dominant effect on the
likelihood of onycholysis, and that crewmembers who have a lower body-mass index (BMI)
(taller, lighter crewmembers) are marginally more susceptible to injury.
Hand width was found to have a significant effect (p = 0.02, 0.01) on injury (See Table 3 and
Figure 19), but width and circumference measured at the knuckles are in the same family. The
results find that large size of the metacarpophalangeal (MCP) joint is associated with more finger
injuries whereas large finger size is not. This finding suggests that onycholysis may be caused in
part by the impact on finger perfusion of the glove's constricting of the hand around the MCP
joint - perhaps when clasping. Increasing the contact pressure on the MCP area may reduce (or
even occlude) venous blood flow from the fingers (Opperman et al., 2009). This, combined with
agitation of the fingertips due to axial loading inside the glove and the presence of moisture,
76
Chapter 4: Statistical Analysis of EVA Hand Injury Data
ultimately irritates the nail bed.
Removing the constriction after clasping may result in
hyperfusion of the fingers, and cause further injury. Thumbnail delamination is extremely rare,
and is documented in only a single case. This supports the suggestion that the MCP joint plays a
significant role in injury.
Viegas (2004) believes that onycholysis has only occurred in Phase VI spacesuit gloves
(gradually introduced from 1998), and not in the preceding Series 4000 gloves. Moreover, since
the incidence of delamination is very low in older astronauts, it is possible that the design of the
older gloves also inhibits injury. This contrast between gloves suggests that the Phase VI custom
glove sizing protocols do not sufficiently accommodate larger MCP joints. Current sizing
protocols increase glove width as hand width increases, but hand thickness is not addressed
(Hodgson, 2009). The new glove may also impose increased contact force on larger knuckles due
to different bending characteristics of the bladder or restraint structure (such as the palm bar).
The increase in EVA injuries since 2002, noted above, may therefore also be due in part to the
dominance of the Phase VI glove since that date, rather than solely due to increased training. The
reduced rates of finger injury in the Russian Orlan gloves also suggests MCP constriction may be
a contributory factor, as that design provides greater accommodation around the MCP joint.
Of the remaining metrics, only the ring finger circumference (at the distal interphalangeal joint)
[14] showed a significant difference between the injured and the control group (p
=
0.04, 0.03)
by 2-sample KS test. The KW test also indicates a significant difference for the left ring finger
circumference at the DIP joint (p = 0.002, 0.04). The ITS reports unfortunately rarely specify
which finger(s) were injured. NASA flight surgeons and crewmembers indicate that multiple
fingers on each hand are usually affected.
77
Chapter 4: Statistical Analysis of EVA Hand Injury Data
4.5
Conclusion
In summary, our results show that finger length was not correlated with higher injury rates
among crewmembers, but we infer that MCP joint width and circumference have a significant
effect on the onset of onycholysis from our statistical analysis. Hand width also narrowly meets
the Bonferroni corrected criterion. It is likely that the current EMU Phase VI gloves constrict
large MCP joints and impede perfusion to the fingers. Crewmembers with a MCP joint
circumference of more than 22.86 cm (9 in) are approximately four times more likely to suffer
onycholysis than those of 22.86 cm (9 in) or less. The increase in onycholysis injuries coincides
with the replacement of the series 4000 with the Phase VI glove, and the associated closer-fitting
custom sizing protocols. Injury rates are also subjectively lower with the Russian Orlan glove,
which provides generous accommodation around the MCP joint. This finding suggests that the
Phase VI sizing protocol should allow for increased accommodation around the MCP joint to
reduce constriction. Crewmembers with MCP joints greater than 22.86 cm (9 in) should also be
especially diligent in using current fingernail injury countermeasures. The results of this study
may assist in the selection of EVA crewmembers, decrease the incidence of medical
interventions (by suggesting early use of onycholysis countermeasures for those at higher risk),
and highlight specific glove sizing configurations in which design improvements could
significantly improve performance and decrease injury.
78
CHAPTER
"All life is an experiment. The more
experiments you make the better."
5
- Ralph Waldo Emerson
EXPERIMENTAL ANALYSIS OF EVA
GLOVE TASKS
In
5.1
Preliminary Finger Contact Pressure Investigation
the quest to understand what causal mechanisms may be pertinent to the study of finger
injury inside the EMU glove, a set of tests are to be conducted on both injured and
noninjured crewmembers. Testing of the gloved hand is performed within a hypobaric
chamber with the goal of establishing whether a correlation exists
between skin blood flow, glove contact pressure and injuries in thee1
crewmember's hands during NBL training and EVA missions.
21
The first step in performing skin blood flow tests within the gloves
worn by astronaut subjects was to identify what suitable equipment
is needed and to develop the experimental protocol for the test.
5.1.1
Preliminary
Test Equipment
testing was
conducted
480
at MIT's Man-Vehicle
721
Laboratory to determine how skin contact pressures are distributed
inside the EMU glove, both in ambient conditions and in a
pressurized glove scenario. Figure 22 shows the EMU hardware and
sensors used for this test.
228
Figure 22: Tekscan (Boston, MA) series 4305 vascular sensor to be used inside
the EMU glove for measuring pressure distribution over the finger (with
dimensions in millimeters)
79
Chapter 5: Experimental Analysis of EVA Glove Tasks
The I-Scan@ pressure measurement system, developed by Tekscan, Inc. (South Boston, MA), is
used for collecting the pressure distribution data. A series 4305 vascular sensor (Figure 23)
consisting of an array of sensels is placed over the dorsum, around the middle finger and under
the palmar region of the hand (Figure 24a). Each sensel contains an enclosed volume of pressuresensitive resistive ink that's conductive ability increases as pressure is increased. The 0.2 mm
thick 4305 sensor is ideal for this analysis as it is thin enough to be placed between the skin
surface and the glove without interfering with the glove fit.
Figure 23: Testing hardware and sensors that include the EMU glove and arm assembly, aluminum ring
that fits on hypobaric chamber seal, and Tekscan pressure sensors.
Despite its benefits and wide range of applications, the sensor does have a drawback in the fact
that it cannot accurately measure pressures over tight radii, such as the tip of the finger. This is
due to an artifact of the sensels being bent; creating tension and a change in the resistive ink's
properties. The sensor has two sections that do not contain sensels. Figure 24a shows the 1st
Chapter 5: Experimental Analysis of EVA Glove Tasks
section positioned on top of the dorsum in such a way that the
2 nd
sensel-less section covers the
tip of the finger, thus preventing the sensor from including these inaccurate data points.
A surgical glove covers the hand for ease of donning and doffing the series 4000 EMU glove
used for this test. The surgical glove also aids in keeping the sensor from being displaced
throughout the duration of the experiment. Figure 24b shows the hand and sensor inside the
surgical glove.
a)
b)
Figure 24 a) Vascular pressure sensor positioned over middle finger b) Hand inserted into surgical glove for
ease of donning/doffing of EMU glove.
Chapter 5: Experimental Analysis of EVA Glove Tasks
A large series 4000 EMU glove and arm assembly provided by Hamilton Sundstrand (Windsor
Locks, CT) was used during testing inside the hypobaric chamber. Figure 25a shows the EMU
assembly inside the chamber and Figure 25b depicts the layout of the pressure measurement
system on the subject's hand, as it is being inserted into the glove.
a)
b)
Figure 25 a) EMU assembly inside hypobaric pressure chamber b) Pressure sensor on subject's hand inside
EMU arm-glove assembly
82
Chapter 5: Experimental Analysis of EVA Glove Tasks
5.1.2
Method
The subject used for this study was a 24 year old, average sized male with hand dimensions that
are considered within the normal range of that of the astronaut population. Data was collected for
3 cases: At ambient pressure (no chamber evacuation), at a pressure differential of 2.17 psid (15
kPa) and 4.3 psid (30 kPa). The latter case represents the pressure difference between the inside
and outside of the suit as experienced in the vacuum of space during EVA. Two scenarios were
considered for the preliminary test: The subject's hand in a relaxed position and then clasped
with the middle finger and thumb pressed together; thus 6 sets of data were collected.
5.1.3
Results
Figure 26 shows the resulting plots for this preliminary testing. From the graphs it can be seen
that peak pressures are measured on the top and bottom of the distal segment of the finger (up to
640 mmHg (85 kPa) in the case of the clasped hand). This data was presented at part of a poster
at the annual SAE International Conference on Environmental Systems (ICES) in San Francisco
on July 1, 2008 (Opperman et al., 2008).
Notice the outlier data points that are recorded for the clasped hand at sensel number 27 with
pressures ranging from 640 to 750 mmHg. These values are considered to be inaccurate as sensel
number 27 is positioned over the Metacarpophalangeal joint (i.e. the knuckle). As the sensel is
bent around this joint when the hand is clasped, this results in sensel saturation. This
phenomenon is also observable to a lesser extent in the case of the relaxed hand as seen in Figure
26a.
The hand graphic in Figure 26a illustrates how the sensels are numbered on the hand while the
hand graphic in Figure 26b explains the technical terms for describing different regions of the
hand.
83
Chapter 5: Experimental Analysis of EVA Glove Tasks
Glove contact pressure data - Relaxed Hand
Sensel #
400
I
E
E
-'
-;)
350
Ambient
760 mmHg
(101.235 kPa)
300
-114 mmHg
(-15 kPa)
250
- -223 mmHg
53
Sensel # 35
i
I
I
I
47
I
I
I
(-30 kPa)
:3
2 200
8
I
I
I
I
i
40
W
33
22
O
27
150
20
100
13
50
0
20
10
0
50
40
30
60
Sensel Number
Wrist and dorsum
Distal &
Top of distal, middle Bottom of
& proximal phalanx distal, middle& proximal
proximal phalanx palmar
Glove contact pressure data - Clasped Hand
Dorsal
Proximal
800
i 700
600
-
$ 500
0.
- Distal T 107
Ambient
760 mmHg
(10 1.235 kPa)
-14
4Pamar
mmHg
(-15 kPa)
-,-223
I
1
I
mmHg
(-30 kPa)
400
80
I
'4
I
I
.
53
e
CL
0.
0
300
67
40
K i
1 0*1
0 200
27
100
''
-
I
13
I
0
0
0
10
20
30
40
50
60
70
Sensel Number
Figure 26: Glove data recorded at the 3 pressure levels for a) relaxed & b) clasped hand
*
Chapter 5: Experimental Analysis of EVA Glove Tasks
5.1.4
Discussion of Pilot Study Results
This set of results allows for the following five observations to be made:
1. As expected, peak pressures on the hand are experienced when the hand is clasped into a
fist, regardless of whether the EMU glove is pressurized or not.
2. Contact pressure is most severe on the finger while the palmar and dorsal regions of the
hand experiences little increase in contact loading.
3. Lower suit pressure reduces loading on the finger, thus a lower operating pressure is
beneficial as it also improves dexterity. However, the physiological limit of the human
body exposed to low pressures poses a trade-off for this benefit.
4. The vascular pressure sensor is not able to give an accurate measurement of contact
forces on the tip of the finger where pressure is believed to be a maximum, as high
average pressures are observed in the region of the sensor gap on the fingertip.
5. Future experiments that make use of laser Doppler flowmetry to measure blood flow
inside the finger might aid in identifying finger tip forces that cause injury if a correlation
exists.
Consideration should be given, however, to the following points when making the above
observations:
1. Only one subject was used for this test, thus no statistical significance can be obtained
from this preliminary study.
2. The 4305 vascular sensor had been used for other studies prior to this one and may have
outlived its useful life period, so its accuracy is not guaranteed.
3. The pressure with which the subject pressed his fingers together during the clasped test
was not controlled. This may explain why higher pressures are recorded for the ambient
case than for the reduced pressure cases as observed in figure 3a. Future tests will include
a means to control the applied pressure to be constant for all subjects.
The lessons learned from this pilot test prepared the researchers for the subsequent glovebox
pilot study conducted at NASA's Johnson Space Center, discussed in the following section.
85
Chapter 5: Experimental Analysis of EVA Glove Tasks
5.2
Hand Injury Pilot Study at Johnson Space Center
5.2.1
Method
Compression on the fingers can be categorized as axial compression experienced at the fingertip,
and perpendicular compression on the fingertip pad (or fingerprint). Axial compression is present
as astronauts try to optimize tactility in the bulky gloves by forcing the fingers all the way into
the glove fingertips. In addition, flexing the fingers can cause a change in length, further
increasing axial pressure. Perpendicular compression is caused by articulating the glove, thus
applying a torque around the metacarpophalangeal or knuckle joint where the finger serves as the
moment arm and the contact force acts on the finger pad. The study involved the measuring of
skin blood flow and contact pressure of the finger tip and finger pad to examine the vascular
response to axial and perpendicular compression. Please refer to Appendix A. 1 Hand Injury Pilot
Study Experimental Protocol for detail on the experiment design.
Blood flow occlusion effects were investigated by imposing axial (fingertip) and perpendicular
(finger pad) compression on the middle finger of the dominant hand. The effects of gripping a
tool in a similar fashion to that during EVA operations were also studied. All tests were
performed in ambient (or tabletop) conditions. Subjects performed three types of tests while
fitted with a skin contact pressure sensor, a skin blood flow sensor positioned on the medial side
of the fingertip, and the EMU comfort glove - a thin cotton glove worn over the hand inside the
glove for ease of donning and doffing.
1. Axial Loading Test - Subjects were instructed to press down on a digital scale using only
the tip of their middle fingers. Loading conditions that were considered include 1 N
incremental loading, 10 N moderate loads and 20 N extreme loads.
2. Perpendicular Loading Test - Subjects pressed down on the scale using only the pad of
the middle finger with loading conditions similar to those of the axial loading test.
86
Chapter 5: Experimental Analysis of EVA Glove Tasks
3. Bulb Compression Test - This test involved the compression of a pressure bulb in the
dominant hand's palm to simulate gripping of EVA tools.
5.2.1.1
Test Equipment
The I-Scan@ pressure measurement system, developed by Tekscan, Inc. (Boston, MA), was used
for collecting skin contact pressure data. A series 4305 vascular sensor (Figure 27) consisting of
an array of 55 pressure transducers is placed longitudinally over the dorsum of the hand and
folded over the tip of the middle finger so that the sensor tip is located on the palmar region of
the hand. Please refer to Appendix E for a data sheet of this sensor. As the sensor is 0.2 mm
thick, it can be placed between the skin surface and the glove without interfering with the glove
fit. However, pressure on the fingertip cannot be measured by the sensor array, due to the tight
radius bending of the individual transducers.
1 1 2 3 4 5 6 7 8 91V1112|
Figure 27: Tekscan series 4305 vascular sensor with handle and control box (Scale indicated in cm)
The sensor is connected to a laptop computer through a sensor handle for transmitting pressure
data at 8 Hz. Figure 28 shows the sensor with its handle as well as the comfort glove used to
keep it in position.
Chapter 5: Experimental Analysis of EVA Glove Tasks
0 1 2 3 4 5 6 7 89 101112
Sensor Handle
EMU Comfort Glove
-
J|Series 4305 Vascular SensorK
Figure 28: Series 4305 vascular sensor with handle and EMU comfort glove (Scale indicated in cm)
In addition to the pressure measurement system, a Laser Doppler Flowmetry (LDF) probe,
developed at NASA's Glenn Research Center and the University of Texas, Houston by Ansari et
al., (2009), is used to measure microvascular blood flow in the fingertip at a rate of 12 Hz
(Shown in Figure 29). Similar tests were performed by Tanaka et al., (2002) and Opperman et
al., (2008) proving that both the Tekscan pressure measurement and LDF sensors could
successfully be used for tests inside a glove.
Figure 29: Laser Doppler Flowmetry Probe with protective sheath
88
Chapter 5: Experimental Analysis of EVA Glove Tasks
The LDF probe measures microvascular red blood cell (RBC) perfusion inside the finger tissue.
It consists of a pair of optic fibers connected to a set of prisms that deflect light traveling
longitudinally along the finger, through a 900 angle, and into the skin. A 780nm wavelength low
power laser illuminates the tissue through one of the fibers, resulting in laser light being scattered
by the tissue, while the other fiber transports reflected rays back to a light-sensitive diode. The
majority of scattered rays are caused by stationary tissue but a small percentage is due to moving
RBC's. By comparing the input and output signals, the Doppler shift of the moving blood cells is
inferred and blood flow or blood cell flux can be determined (Holloway & Watkins, 1977).
A close-up view of the sensor and the probe positioned on the finger is shown in Figure 30. The
vascular sensor wraps around the middle finger longitudinally and is positioned as shown to
prevent transducers from being subjected to excessive bending around the fingertip. The figure
also shows the LDF probe positioned on the lateral side of the distal segment of the middle
finger, just below the fingernail, in order to obtain blood flow data as close to the fingertip as
possible.
Care is taken in placement of the probe to prevent it from interfering with the vascular sensor
and the probe itself being in the way when the subject is applying a load to the scale or bulb. The
probe is placed on a flat section of the skin surface and secured in place with medical tape to
ensure a strong signal while data is being collected. Note however that if the tape is applied to
tightly, this will result in additional pressure being exerted on the skin in the region of the LDF
sensor and will have a negative effect on blood flow readings in the finger.
89
Chapter 5: Experimental Analysis of EVA Glove Tasks
Figure 30: Vascular sensor and LDF probe positioned on the right middle finger such that no transducers are
present on the finger tip
Figure 31 shows the equipment that was used for measuring applied compression loads on the
fingertip, pad, and hand during scale and grip tests. A digital countertop scale was used during
the fingertip and finger pad tests while a sphygmomanometer gauge was attached to a pressure
bulb to measure compression during the grip test.
90
Chapter 5: Experimental Analysis of EVA Glove Tasks
Figure 31: Digital countertop scale and bulb-gauge assembly of the sphygmomanometer used for compression
and gripping tests (Scale indicated in cm)
The study protocol was reviewed and approved by the Johnson Space Center Committee for the
Protection of Human Subjects (CPHS) in July of 2008. A copy of the protocol is attached as
Appendix A, the test matrix is included in Appendix B with an example of the raw data
presented in Appendix C. The CPHS approval letter is attached as Appendix D.
5.2.1.2
Subjects
Seven healthy subjects (6 male and 1 female), aged 24-52 years, were used for the analysis.
Their hand dimensions fell within the range of the astronaut population as determined from the
JSC crewmember anthropometric database, as shown in Table 5.
91
Chapter 5: Experimental Analysis of EVA Glove Tasks
Table 5: Hand data for subjects (n=7) and crewmembers whose records are complete (n=216)
Hand Length [mm] (inches)
5.2.1.3
Subjects
Crewmembers
Minimum
165 (6.5)
160 (6.3)
Maximum
218 (8.6)
225 (8.9)
Arithmetic Mean
195 (7.7)
191 (7.5)
Standard Deviation
17.3 (0.7)
11.3 (0.4)
Testing Procedure
The digital scale was used in measuring the pressure applied by the subject for the following two
configurations:
1. Finger pad - where the subject, while holding his/her dominant hand in a horizontal
position, presses down on the scale with the distal segment of the middle finger.
2. Finger tip - where the fingers are held in a vertical position and the subject presses down
onto the scale with the tip of the dominant hand's middle finger.
Figure 32 shows the subject pressing down with the fingertip while fitted with the pressure- and
LDF sensors.
92
Chapter 5: Experimental Analysis of EVA Glove Tasks
Figure 32: Subject applies pressure to scale using the finger tip while wearing instrumentation and the EMU
comfort glove
A distinction is made between two aspects of microvascular blood flow, referred to as total blood
flow or blood cell flux and pulsatile flow. Blood flow is the total volume of blood that flows
through the venous region directly under the LDF probe (up to 2 mm in depth). Pulsatile flow or
pulsation effects however are present in the blood flow data and are a measure of systolic and
diastolic cycles in pumping of blood through the heart.
When adequate pressure is applied to a part of the skin, pulsation effects are no longer observed,
indicating that the region is cut off from any fresh blood supply. In this study the loading
scenario that is associated with this point where pulsation ceases, is of interest as it may explain
the differences between crewmembers that are susceptible to fingernail delamination and those
that are not. This level of loading can be identified by having the subject increase applied
pressure by small increments until pulsation effects diminish.
Chapter 5: Experimental Analysis of EVA Glove Tasks
5.2.1.4
Finger Pad vs. Fingertip Tests
Subjects wore an EMU comfort glove and were instructed to press down on the scale, first with
the pad of the dominant hand's middle finger, then with the fingertip. Measurements were taken
as the applied load was increased from 0 to 10 N with 1 N increments, each of 20-second
duration to eliminate any transient responses. An end loading value of 10 N was selected as it
was found that 10 N is an easily attainable load that subjects can maintain for long periods of
time. 1 N increments also proved to be a sufficient resolution for capturing the pulsation drop-off
or occlusion point.
Subsequently three measurements were taken for a 10 N loading and another three at 20 N.
Three measurements at each load allowed us to use reliable average values. The 20 N load was
chosen because it demands substantial effort from the subject and could be used to compare flow
characteristics in the fingertip and in the pad at high loading. This procedure was followed for
both the finger pad and tip configuration; blood flow was measured on the medial side of the tip
of the same finger.
The digital scale served as a control to ensure that all subjects apply the same pressure and also
to determine at what load level occlusion sets in. Subjects were instructed to maintain a reading
on the scale that is within 20% of the desired load.
5.2.1.5
Pressure Bulb Test
The second test required subjects to compress the bulb of a sphygmomanometer to 100 mmHg
(13.3 kPa) and also to 200 mmHg (26.7 kPa). This task represents gripping of an EVA tool. Both
load conditions were repeated three times with 20-second loading intervals to obtain average
values. The 100 mmHg compression was selected because it is the force needed to grip an object
while manipulating it. The 200 mmHg value represents a tight grip that may influence blood
flow and the possible onset of fingernail delamination. The gauge allows us to specify a constant
94
Chapter 5: Experimental Analysis of EVA Glove Tasks
pressure that all subjects are to apply during each stage of the test. Subjects are required to keep
the constant pressure value within a 20% error margin as in the case of the compression tests.
Figure 33 shows the subject's hand fitted with the vascular .sensor and LDF probe, wearing an
EMU comfort glove while compressing the sphygmomanometer bulb to a pressure of 100 mmHg
(13.3 kPa). This value correlates to exerting a moderate gripping pressure.
Figure 33: Subject demonstrating use of the sphygmomanometer assembly during the 100 mmHg test
5.2.2
Results
All subjects successfully completed the test procedure.
Figure 34 shows the results of average epidermal blood flow for the finger pad and fingertip
configuration as obtained from the scale tests. Blood flow is normalized for its baseline value
taken at rest. Error bars denote standard errors of the mean at each load increment.
95
Chapter 5: Experimental Analysis of EVA Glove Tasks
1.4
1.2
1.0
0.8
0.6
0.4
0.2
0.0
0
1
2
3
4
5
6
7
8
9
10
20
Contact Force (Newton)
Figure 34: Epidermal blood flow in the finger - Fingertip vs. Finger pad
Figure 35 shows the effects of pulsation in the superficial venous region of the finger for the
range of applied pressure to the digital scale. Error bars denote standard errors of the mean at
each load increment.
1.2
-
Finger Tip
i.0
I I
~'
0.8
0.6
-
0.4
-
0.2
-
Finger Pad
0.0
0
1
2
3
4
5
6
7
8
9
10 20
Contact Force (N)
Figure 35: Pulsatile flow in the finger - Fingertip vs. Finger pad
96
Chapter 5: Experimental Analysis of EVA Glove Tasks
Skin compression and normalized blood flow variation for the different regions of the hand is
presented in Figure 36. This data was recorded on the dominant hand of each subject during the
sphygmomanometer grip tests. Error bars denote standard errors of the mean.
Data from the individual transducers of the vascular pressure sensor array were averaged for the
different regions of the hand, namely the dorsum and palm sections of the hand, and the top and
bottom of the middle finger. The results shown in Figure 36 depict averages of these values for
all subjects.
(mmHg) (kPa)
250
UDorsum1
U Top of Flnger
0 Bottom of Finger
30
*Pain
200
0O
1 Skin Blood Flow
& 150-20
C
-0.75
#
100
C
0.60 g
-~10
so
-0.25Z
0
0
0
100
Bulb Pressure Inunmg)
200
Figure 36: Skin compression and blood flow for different regions of the hand and middle finger measured at
no gripping (0 mmHg), moderate gripping (100 mmHg), and high gripping pressure (200 mmHg).
5.2.3
Discussion
Results shown in Figure 34 indicate that blood flow drops more rapidly in the case of the finger
pad and stabilizes at a value of -38% of the baseline blood flow when a contact force load of -6
N is exerted on the scale. Blood flow does increase again for the 20 N loading condition, but this
is not observed in the fingertip -
the decrease in blood flow is more gradual there. Only at the
Chapter 5: Experimental Analysis of EVA Glove Tasks
20 N loading point does the fingertip blood flow drop below the -38% level of the finger pad
blood flow.
Pulsation is assumed to have ceased when a subject's heart rate is no longer distinguishable from
signal noise and the skin pulsatile flow gradient approaches zero. In Figure 35 this minimum
gradient region is observed where the pulsatile flow has decreased to just over 20 percent of the
normalized baseline value in the case of the finger pad. This event coincides with a reduction in
standard error range to about 5 percent of the baseline pulsatile flow. Such an occurrence is
observed in Figure 35 at a contact force of 6 N. The data in this figure show a similar trend in the
occlusion effects as to that of Figure 34, namely that pulsation diminishes where the reduction in
blood flow stabilizes at about 6 N for the finger pad. The data show that while pad pulsation
ceases at around 6 N, fingertip pulsation is still present at 20 N loading. Notice the recovery in
pad pulsation when the finger is loaded to 20 N. In the figures both for blood flow and for
pulsation an increase is observed at 10 N loading for the finger pad. This suggests that a
minimum in blood flow and pulsation in the finger pad occurs in the 6-9 N range, after which
both tend to increase again.
These results indicate that applying a load with the finger pad as opposed to the fingertip results
in distinct changes in blood flow occlusion. As shown in Figure 34 and Figure 35, in the case of
the finger pad, pulsation diminishes as reduced blood flow stabilizes at around 38% of the
baseline blood flow value. The apparent rise in blood flow and pulsation around 20 N in the case
of the finger pad could be attributed to tremors of the hand. Some subjects reported that they had
difficulty in maintaining the 20 N loading for an extended period of time. With the fingertip,
however, blood flow as well as pulsation effects are still prominent at a contact force loading of
20 N, indicating that axial loading on the fingertip has a substantially less significant effect on
blood flow than perpendicular loading on the finger pad.
Pronounced hyperperfusion is also observed when the finger is removed from the scale so that
contact force loading is interrupted. This violent return of blood to the distal segment of the
finger may be a contributing cause of the injury sustained.
98
Chapter 5: Experimental Analysis of EVA Glove Tasks
Figure 36 shows that blood flow reduces by ~50% for the 100 mmHg (13.3 kPa) compression
but increases again to only 45% reduction for the 200 mmHg (26.7 kPa) compression. This
follows the trend found in the finger pad and tip experiments. The graph indicates that the
bottom of the middle finger experiences the highest compression levels, followed by the palmar
region of the hand. This is expected as the palm and bottom of the fingers are in contact with the
bulb when it is being compressed. The dorsum and back of the fingers are subjected only to
tension from the EMU comfort glove, and did not experience a significant increase in surface
pressure. It is also evident that the reduction in blood flow in the case of the pressure bulb (50%)
is not as low as in the scale tests (60%).
5.2.4
Conclusion
This investigation intended to help understand and ultimately reduce the number of hand injuries
astronauts sustain during EVA training and operations. As finger injury may be caused by
variations in normal blood flow, the contact pressures imposed by the EMU glove on the hand
may be a causal factor of finger injury (and particularly fingernail delamination) in the EVA
astronaut population. This study showed that blood flow in the finger is more sensitive to
perpendicular loading on the finger pad than to axial loading on the fingertip. Further, mild
gripping caused a 50% reduction in skin blood flow. Excessive hyperperfusion was observed for
all tests following contact force or pressure, which may also contribute to the onset of
delamination. These results indicate that the pressure on the finger pads required to articulate
stiff gloves is more likely to impact blood flow than the pressure on the fingertips associated
with tight or ill-fitting gloves. Improving the flexibility of the gloves will therefore not only
benefit operational performance, but may also be an effective approach in reducing the incidence
of finger injury.
99
Chapter 5: Experimental Analysis of EVA Glove Tasks
100
CHAPTER
6
"If you do not change direction, you may end up where
you are heading."
-
Lao Tzu (Chinese taoistPhilosopher)
SUMMARY AND CONCLUSIONS
6.1
Three
Summary
areas pertaining to astronaut extravehicular activity-related injuries were covered
in the engineering section of this thesis. The analyses were focused on hand injuries
inside the EMU spacesuit glove and EVA training-related shoulder injuries - the two
major categories of injuries recorded in the astronaut corps's injury database. The research
effort included modeling, statistical analysis and experimental testing and was subdivided as
follows:
>The
development of a cursory musculoskeletal design tool for comparing different suit
concepts while optimizing comfort and mobility.
>
A statistical analysis of EVA crewmember anthropometric and injury data to investigate
possible correlations between fingernail delamination and hand size.
>
Experimental testing to evaluate changes in blood flow and contact pressure in the finger
tips due to compression of the skin inside the EMU glove while performing simulated
EVA tasks.
Contributions
6.2
The following three contributions were made with this thesis:
>
A cursory musculoskeletal design tool was developed that may be used to get a sense of
range of motion and comfort consideration during the initial stages of new hard upper
101
Chapter 6: Summary and Conclusions
torso suit concepts. The tool allows the user to optimize comfort and mobility before the
design leaves the digital drawing board.
>
Results of the statistical analysis of EVA crewmember anthropometric and injury data
indicate that the ratio of finger-to-hand length is not a significant contributing factor to
the onset of fingernail delamination. Hand width and hand circumference however were
found to be significantly associated with injury. A cut-off hand circumference value was
identified that may serve as an early warning indicator of crewmembers that may be
prone to fingernail delamination.
>
The experimental testing with blood flow and contact pressure in the finger tips serves as
a pilot study and protocol validation for ongoing research efforts at NASA's Johnson
Space Center. The study revealed correlations between blood flow and skin contact
pressure that may contribute to the onset of fingernail delamination.
6.3
Limitations and Future Work
The protocol for the skin blood flow and contact pressure study has been modified for use in a
future test that involves astronaut subjects. By comparing blood flow and contact pressure
characteristics of uninjured crewmembers to that of injured crewmembers, we hope to determine
what the salient differences are between these two groups. Ideally 8 or more crewmembers will
be tested: 4 with past fingernail injuries related to the EMU glove and 4 with no prior injuries.
Subjects will be asked to perform tasks similar to those performed during NBL runs and actual
EVA missions while blood flow and skin contact pressure is measured.
Tests will be conducted in both ambient (tabletop) conditions as was done during this study as
well as in an EMU glove inside a hypobaric chamber (or glovebox) that creates the same
pressure differential between the in and outside of the glove as that encountered during orbital
missions.
102
Chapter 6: Summary and Conclusions
It should be kept in mind that the gloves are certified with the full suit and that glove dynamics
in the glovebox are different to that of the gloves in full suit configuration. This fact should be
considered during future efforts.
Figure 37 is a photograph of the JSC hypobaric chamber that will be used for the crewmember
study. Figure 38 shows a subject's hands with the Phase VI EMU gloves donned inside the
chamber while pressing down on the digital scale with the fingertip.
Figure 37: Hypobaric chamber (or Glovebox) at NASA's Johnson Space Center in Houston, Texas
103
Chapter 6: Summary and Conclusions
Figure 38: Subject applies pressure to the digital scale inside the glovebox with EMU gloves donned
By measuring blood flow and contact pressure for these two groups, data obtained from these
tests may aid in explaining the causal mechanism for EVA hand injuries and how glove designs
may be improved to mitigate them.
104
SECTION II: POLICY
ANALYSIS
105
106
"A policy is a temporary creed liable to be changed, but while it holds good it has
got to be pursued with apostolic zeal."
- Mohandas Gandhi
107
108
CHAPTER
"Although we have been thrust into this prominent place,
we are still merely dust within the vacuum of space."
7
- Anonymous
ORBITAL COLLISIONS & SPACE
DEBRIS
7.1
Introduction and Background
pace debris has been present in Earth's orbit since the first object made by man was
launched into space. The Explorer 1 satellite that was used to discover the Van Allen
radiation belts was the third satellite ever launched and is still in orbit today after more
than 50 years. In its current orbit, this satellite should continue circling the Earth for the next
several thousand years and serves as an example of how manmade satellites may influence our
future use of our immediate surroundings in space (McNutt, 1992). This section of the thesis
considers the effects of space debris as promulgated by recent events occurring in Earth orbit.
Technical mitigation methods and policy strategies are presented and recommendations are made
on how to effectively address the problem of space debris.
Before delving into the topic, however, one first needs to answer the question: What exactly
constitutes space debris? The U.S. Space command formally defines space debris as
"Any object that is in orbit around the Earth not in use, or controlled, or of any scientific or
economic value"
-
U.S. Space Command Catalog, 1992
Recent estimates indicate that about 90% of all objects in outer space are classified as debris
(Masson-Zwaan, 2009). In additional to active space hardware such as satellites, the ISS and
space shuttle, examples of debris include:
109
Chapter 7: Orbital Collisions & Space Debris
-Old,
non-operational satellites
-
Spent rocket boosters
-
Operational debris: explosive bolts, fasteners, tools dropped by astronauts
-
Approximately 600,000 objects above 1 cm are orbiting the earth and 100,000 of
these orbiting fragments are between 1 and 10 cm. These objects typically consist
of metals like aluminum, steel, or titanium and have a high ballistic coefficient
that prolongs their orbital lifetime (Oswald et al., 2006; ESA, 1988)
-
Tens of millions of particles < 1 cm such as paint chips and small solid rocket
exhaust particles (Senechal, 2007)
-
It is generally accepted that the debris population dominates the natural meteoroid
population for object sizes 1 mm and larger and an estimate of the mass of nearEarth meteoroids (within a 2000 km radius) is about 200 kg at any given time as
compared to the 3,000,000 kg of manmade debris (Grossman et al., 2010;
McNutt, 1992; Kessler et al., 1989)
Meteoroids tend to follow a hyperbolic trajectory with high velocities as it passes Earth, while
manmade debris is typically found in near-Earth orbit. The average orbital velocity of these
objects is in the order of 20 km/sec so that even a very small object contains a high amount of
kinetic energy and can generate substantial structural damage when impacting other orbiting
space systems.
Meteoroids only have one opportunity to collide with valuable space systems in orbit before they
leave the vicinity of the Earth while on their hyperbolic trajectory. The probability of a
meteoroid impacting space hardware is therefore far less than that of manmade debris
continually orbiting the Earth for tens, hundreds, or even thousands of years. As Taylor points
out:
110
Chapter 7: Orbital Collisions & Space Debris
"...everything orbiting around Earthposes some level of risk to every other object in orbit. This
issue is which of those objects should be classified as orbital debris. At the outset, objects and
particles that occur naturally in space, even though they do pose some risk to satellites, should
be excluded from the definition of orbital debris because humans have no way to control the
creation, movement, or removal of those types of objects in space" (Taylor, 2006).
For this reason, and also because this thesis focuses on the regulation and mitigation strategies
concerning manmade debris, natural debris like meteoroids and comet particles are not
considered at this time.
Figure 39 shows a model of the debris population around Earth as reported by the U.S. Space
Command Catalog. A dense concentration of debris is present in low Earth orbit while the ring
of satellites lining the geostationary orbit is clearly visible. The orbital trajectories of these debris
objects vary from highly elliptical to nearly completely circular.
Earth orbit may be considered as a tragedy of the commons case. Currently there is no cost
associated with the right to use space (in addition to basic launch and operation costs). This
scenario, as is the case with many natural resources on Earth, leads to over-usage that in turn
proves to be equally detrimental to all parties involved unless regulated appropriately.
111
Chapter 7: Orbital Collisions & Space Debris
ate,
ua
cAD
The hyper velocities and crisscrossing orbital trajectories of space debris make them particularly
hazardous for space operations. These objects' orbital speeds of up to 20 km/sec present a very
real risk of significant damage to spacecraft and satellites, resulting in millions of dollars being
spent to replace or repair space hardware.
Not only does orbital debris pose a risk to mission-critical components, but may be lifethreatening to astronauts. Figure 40 shows damaged caused to a side window of the space shuttle
Challenger during mission STS-7 that flew in 1983. The debris object that impacted the window
was a 0.2 mm paint fleck traveling at hyper velocity. While the debris particle did not penetrate
the window completely, that may have lead to an emergency scenario with depressurization of
the shuttle, it did require replacing the window upon return to Earth, costing about $50 000.
112
Chapter 7: Orbital Collisions & Space Debris
Figure 40: The damage caused by a 0.2 mm paint fleck impact on the shuttle window during the STS-7
mission required a $50,000 repair (McNutt, 1992) Image courtesy NASA
While the inherent dangers of debris are clear, an even more ominous scenario may be at hand one with potentially devastating consequences - the onset of the menacing Kessler effect. The
Kessler effect, also known as Kessler syndrome or Collisional Cascading, was first coined by
Donald Kessler, former NASA Orbital Debris Program Office head and is defined as "a chainreaction of collisions leading to an exponentialgrowth of self-generatingdebrispopulation once
critical density is reached" (Kessler et al., 1989).
Critical density is defined in turn by the U.S. National Research Council's Committee on Space
Debris as "the point at which more fragments will be generated by collisions than will be
removed by atmospheric drag, even if no further objects are added" (U.S. National Research
Council, 1995).
113
Chapter 7: Orbital Collisions & Space Debris
MIT Aeronautics and Astronautics professor Dava Newman adds that a subtler problem with
space debris lies in the fact that the hazards are nondeterministic. She explains that this is due to
the fact that "space debris is more the result of fragmentation or breakup of satellites than
deterioration and out-phasing of satellites. Typically a single breakup can result in as many as
500 or more observed pieces. Each piece is free to settle in a new unpredictable orbit, creating a
nonlocalized potential danger for operational satellites (i.e., an impact can come from
anywhere)" (Newman, 2002).
Not all debris particles cause the same amount of damage. Hypervelocity impact damage may
vary from penetration, perforation, detached spall, local deformation, erosion and fractures.
Objects smaller than 1 cm in diameter that travel at higher speeds than 20 km/sec such as
micrometeoroids tend to vaporize on contact and do not cause significant damage.
The size of a debris particle also governs its destructive capability. Fragmentation debris ranging
between 1 and 5 cm is considered to be the most dangerous as objects larger than 5 cm can be
detected with radar and thus potentially avoided through maneuvering of the spacecraft and the
effects of objects smaller than 1 cm can be minimized by shielding and satellite design (McNutt,
1992).
Various techniques have been developed in an attempt to monitor, mitigate and protect against
the effects of orbit debris. The next section considers each of these in more detail.
7.2
Tracking, Mitigation & Protection Strategies
The potential hazards associated with space debris may be avoided by one (or a combination) of
three ways: Debris tracking, mitigation, and space system protection.
7.2.1 Tracking of Orbiting Bodies
114
Chapter 7: Orbital Collisions & Space Debris
Space surveillance involves the detection, tracking, cataloging and identification of man-made
objects orbiting Earth. By far the bulk monitoring of all space objects (including debris) is
performed by the Space Surveillance Network (SSN). The SSN, which falls under the U.S.
Strategic Command, is a worldwide network of 29 ground-based optical and radar sensors as
well as one space-based sensor. These sensors include phased-array radars, conventional radars,
electro-optical sensors and the Midcourse Space Experiment (MSX) satellite that contains a
variety of sensors. Monitored objects include active and inactive satellites, operational
spacecraft, spent rocket bodies, and debris fragments 5 cm and larger. (USSTRATCOM, 2008).
Space surveillance accomplishes the following according to Senechal (2007):
-
Predict when and where a decaying space object will reenter the Earth's atmosphere
-
Prevent a returning space object, which to radar looks like a missile, from triggering a
false alarm in missile-attack warning sensors of the U.S. and other countries
-
Chart the present position of space objects and plot their anticipated orbital paths
-
Detect new man-made objects in space
-
Produce a running catalog of manmade space objects
-
Determine which country owns a re-entering space object
-
Inform NASA whether objects may interfere with the orbits of the Space Shuttle and the
International Space Station.
7.2.2 Technical Mitigation and Cleanup Strategies
A variety of mitigation strategies are in existence today. The most prominent ones are discussed
here to give the reader a sense of what is currently being done to fight the orbital debris problem.
115
Chapter 7: Orbital Collisions & Space Debris
7.2.2.1 Atmospheric Drag - Nature's Vacuum
Atmospheric drag is considered the most efficient tool in the struggle against space debris, as it
slows down objects in their orbits around the Earth, causing them to spiral inwards, thus losing
altitude and ultimately reentering the Earth's atmosphere where they burn up harmlessly.
Atmospheric drag only influences objects in Low Earth Orbit or LEO and is most effective at an
altitude of 400 km (250 miles) and below. LEO spans from 160 to 2,000 km (100 - 1,240 miles)
above the earth's surface so debris in higher orbits such as Geostationary Earth Orbit or GEO
with an altitude of 35,786 km (22,236 miles) will experience a rate of orbital decay orders of
magnitude slower, thus staying in orbit for hundreds or even thousands of years. It is worth
noting however the Earth's atmosphere expands and contracts in conjunction with the 11-year
solar cycle that causes the thermospheric density to increase with a factor of up to 5 during major
solar/geomagnetic storms, thus affecting objects in higher orbits as well (Knowles et al., 2001).
7.2.2.2 De-orbiting of Space Hardware
It is this cheap debris-cleaning feature of our planet that first promoted the idea of de-orbiting
retired space hardware, causing it to burn up during re-entry. The MIR space station is a good
example of decommissioned space hardware that was given just such a burial at the end of its
useful life of 15 years when, on March 23, 2001, it re-entered Earth's atmosphere over the
Southern Pacific Ocean. Most of the station burned up in the atmosphere but a small residue of
unburned fragments harmlessly splashed down in the sea.
7.2.2.3 Re-orbiting of Space Hardware
Certain satellites orbit the Earth too far away for de-orbiting to be a viable option. Examples
include the satellites in geosynchronous orbit or GEO. Such satellites, when reaching the end of
their operational lifetimes, become debris pieces that may pose a threat to still active satellites in
the same vicinity. By rather re-orbiting such satellites to a higher, less populated or 'graveyard
orbit', usually about 300 km above GEO or 35,000 km above the earth, right before the last
116
Chapter 7: Orbital Collisions & Space Debris
amount of onboard fuel used for orbital maneuvering is used up, this threat is reduced
substantially.
7.2.2.4 Passivation
A third technique used to reduce the debris population involves the passivation of rocket
bodies. Booster stages that contain some leftover propellant may explode due to harsh thermal
fluctuations in space and are thus considered a threat. By allowing rocket bodies to burn up their
fuel reserves entirely while re-orbiting/de-orbiting, this threat is eliminated.
7.2.2.5 On-orbit Maneuvering
On-orbit maneuvering is another option that requires an additional reserve of fuel. By
monitoring debris and providing early warning of potential collisions, a satellite or spacecraft
may be directed to change its orbit prior to impact. This option does include the additional uplift
cost associated with launching the added weight in fuel and only a limited number of
maneuvering procedures may be performed on a fixed amount of fuel.
7.2.2.6 Minimizing Release of Operational Debris
One debris mitigation technique that is receiving widespread attention is that of minimizing
operational debris by designing satellites to be launched and deployed with the minimum
amount of operational debris being released into orbit. Instead, fasteners and other components
are designed to stay attached to the satellite after they have completed their role in keeping the
craft connected to the booster stage during launch. This approach is actively promoted in the
orbital debris mitigation guidelines discussed in chapter 8, though, seeing as it involves
additional development cost, not all stakeholders are keen on implementing such precautionary
measures, especially as it is not mandatory.
117
Chapter 7: Orbital Collisions & Space Debris
7.2.2.7 Space Traffic Management
The risk associated with debris may be reduced through effective space traffic management.
Tracking debris with the SSN and allocating orbital slots to specific satellites spreads the
distribution of active satellites, thus decreasing the probability of collisions. It should be noted
however that space traffic management may impact national security aspects of various
stakeholders as it would include tracking of military satellites, thus international consensus needs
to be reached for such an effort to be successful. Also note that if debris proliferation is left
unchecked, an inevitable consequence would be that even if satellites are spaced far enough
apart, crisscrossing debris fragments will make such precautions ineffective and lead to less safe
orbits as collisions produce ever more fast-flying debris pieces.
7.2.3 Shielding
Shielding is an effective strategy for dealing with orbital debris less than 1 cm in size. It usually
consists of multiple layers of aluminum or other metals that absorb the energy of fast moving
debris fragments as they impact a satellite. Figure 41 shows the damage that results from a 1gram debris pellet impacting a multi-layered debris shield. Notice that the bottom layer was not
penetrated by the particle.
118
Chapter 7: Orbital Collisions & Space Debris
Figure 41: Damage caused by a 1 gram Tantalum pellet that impacted six 2 mm aluminum plates with an
impact velocity of 6.54 km/sec (McDonnell Douglass Corp, 1990)
While shielding may present substantial uplift costs due to the additional weight of the satellite,
improved satellite design combined with shielding of mission critical and unstable parts of the
satellite, such as fuel lines, electronics and propellant tanks, may present a viable protection
strategy.
7.3
Latest Space Debris Mitigation Concepts
Increased public awareness and rising concern regarding space debris has led to some innovate
and at times far-fetched ideas for addressing this growing environmental problem. The
potentially most promising as well as a few outlandish proposals are discussed in this section.
119
Chapter 7: Orbital Collisions & Space Debris
>
Laser Broom
Campbell et al., (2009) are developing a laser broom at NASA's Marshall Space Flight Center.
The laser's intended use is for ablating debris so that when the laser light hits a fragment, one
side of the fragment would ablate, creating a thrust that would change the eccentricity of the
fragment's orbit until it would re-enter Earth's atmosphere and bum-up harmlessly.
>
Low Cost Unmanned Aerial Vehicles
Jereome Pearson, an engineer best known for coming up with the space elevator concept in the
1970s, proposes a seven-year mission in which a dozen suitcase-sized spacecraft would be
launched on larger payload flights with some room to spare. Every one of these spacecraft would
hold 100 lightweight nets, each large enough to contain the volume of a mid-sized house. Using
remote control these unmanned aerial vehicles or UAVs can then be maneuvered to capture
debris and drag it down to the atmosphere. The estimated cost for the entire project is $240
million (Schwartz, 2010).
>
Nanosatellites Gone Fishing
Some NASA scientists proposed that a 10-ton 'mothership' be fitted with legions of massproduced nanosatellites that would target debris fragments lighter than 2 pounds, catching them
in lightweight nets and dragging them to the Earth's atmosphere to be burnt up.
>
Tethers
This concept envisions trailing electrodynamic tethers being attached to space debris. The tether
is basically a wire-mesh kite trailing up to 6 miles long. By applying a current to the mesh, it is
caused to interact with the Earth's magnetic field, resulting in a drag effect that would pull the
debris towards the Earth.
>
Giant Aerogel Balls
Some in the debris community propose that giant sticky aerogel balls be launched into orbit and
then serve as huge catcher's mitts, adhering to objects and dragging them out of orbit. It is worth
mentioning though that this approach could present a hazard to active space hardware (Schwartz,
2010).
120
Chapter 7: Orbital Collisions & Space Debris
>
Cubesail Concept
The Cubesail concept involves a giant solar sail that is to be deployed at the end of a satellite's
operational life. The drag of the sail would then gradually pull it down to Earth. Figure 42 shows
a graphical depiction of this idea with the satellite shown in the center of the sail.
Figure 42: Cubesail concept demonstrated with a nanosatellite in front of a 5x5 m deployed solar sail (Image
courtesy of engadget.com)
121
Chapter 7: Orbital Collisions & Space Debris
7.4
Orbital Collision Examples
Two recent orbital collisions are considered in this section in an effort to obtain better
understanding of the effectiveness of current space debris mitigation efforts.
7.4.1 Example #1: February 2009 Orbital Collision between Cosmos
and Iridium Satellites
The spectacular collision between the defunct Russian Cosmos 2251 and commercial U.S.
Iridium 33 satellites that occurred on February 10, 2009 is an unprecedented event in the history
of space travel as this marked the first recorded time that two satellites collided on orbit.
The delta-V (difference in velocities of the respective satellites) at the time of impact was 11.6
km/s (26,170 mph) at an altitude of 788 km over northern Siberia and caused the 560 kg Iridium
and 950 kg Cosmos satellites to disintegrate completely. The SSN cataloged 386 pieces of debris
from the Iridium and 927 pieces from the Cosmos satellites (Kelso, 2009). Keep in mind that the
SSN can only detect debris pieces larger than 5 cm so this indicates that far more smaller debris
particles were dispersed as a result of this collision. It is estimated that this collision resulted in
an increase of 50% in collision risk for the remaining 65 Iridium constellation satellites that are
deployed in the same orbital region (Oliver, 2009). Figure 43 shows a model of the Iridium 33
satellite.
122
Chapter 7: Orbital Collisions & Space Debris
Figure 43: Mock-up of the Iridium 33 Satellite with scale of actual satellite indicated (Image Credit: NASA)
It is interesting to note that neither satellite was insured (Masson-Zwaan, 2009) while both states
involved, the USA and Russia, are parties to the 1967 Outer Space Treaty, the 1972 Liability
Convention and the 1975 Registration Convention (Each of these Treaties are discussed in more
detail in the following chapter).
Under the 1972 Liability Convention, there are three potential legal areas that may be applicable
to this case. These include:
-
Second-party Liability
-
Third-party Liability
-
Insurance Coverage
123
Chapter 7: Orbital Collisions & Space Debris
7.4.1.1 Second-party Liability
Second-party liability covers the question of who should be blamed for the collision among the
parties involved and thus which party should be compensate by the other for the lost satellite. It
has been argued in the past that 'dead' satellites might no longer qualify as 'space objects' for
which a state can be held responsible and liable, since it has no means of controlling it. The same
would apply to pieces of debris. If it can be established that a certain piece of debris belonged to
a certain space object, can the launching state of that initial object still be held responsible and
liable for the piece of debris? The concepts of 'abandonment' and 'salvage' come into play here
and parallels with the law of the sea can be made. Still, there may be difficulty or impossibility
of identification of a small piece of debris as belonging to a certain space object (Masson-Zwaan,
2009). .
7.4.1.2 Third-party Liability
It is possible that an outside party (such as an agency monitoring objects) might have been
negligent in warning Iridium of the imminent collision (Masson-Zwaan, 2009), which is an
example of third-party liability.
7.4.1.3 Insurance Coverage
While neither satellite was insured at the time of the collision, it is currently becoming more
common to extend the initial launch policy also to cover a satellite's life-in-orbit, but it is not
(yet) common practice to continue coverage beyond the useful life of a satellite, nor does this
seem probable (Masson-Zwaan, 2009).
7.4.2 Example #2: Chinese Anti-Satellite Incident during January of
2007
On January 11, 2007 China stunned the world by executing an anti-satellite (ASAT) Test when it
shot down its own Fengyun FY-IC weather Satellite. The FY-IC, a 750 kg polar orbit weather
124
Chapter 7: Orbital Collisions & Space Debris
satellite, was destroyed by a SC- 19 kinetic kill vehicle. The Delta-V between the satellite and the
missile at impact was 8 km/s (17 895 mph) (Leonard, 2009). Figure 44 shows an artist's
rendition of the Fengyun FY-IC satellite.
Figure 44: The Fengyun FY-1C weather Satellite with a deployed length of 10 m. The dimensions of the
hexahedron is 1.42x1.42x1.2 m (Image Courtesy: NASA)
After the collision, 2,087 pieces of debris large enough to be routinely tracked by the SSN was
observed. The NASA Orbital Debris Program Office estimated that the event generated over
35,000 pieces of debris down to 1 centimeter in size (Kelso, 2007).
China's action was sternly condemned by several nations and lamented for undoing years of
progress that was made earlier in mitigating debris growth on orbit.
This event also sparked the renewed interest in the so-called Space Preservation Treaty proposed
by Congressman Dennis Kucinich (Democrat of Ohio) where he proposes the banning of space
weapons. The Space Preservation Treaty has been proposed four times, the last in May of 2005.
To date it has not been ratified.
One would expect that if such a Treaty was to be entered into force, it would be as a result of an
incident such as this ASAT test by China when space debris is a big concern. However, no
significant steps were taken as a result of this collision, indicating that the current legal and
policy framework in place to deal with debris generation and mitigation is not adequate at all.
125
Chapter 7: Orbital Collisions & Space Debris
7.5
Conclusion
It is very clear that orbital debris poses a significant threat to space hardware and human life.
Increasing activity in space near Earth may hasten the onset of the ominous and imminent
Kessler effect unless decisive action is taken to reduce the size of the debris cloud currently
surrounding our planet and additional debris prevented from being introduced to this debris
environment.
While various mitigation, tracking, and protection techniques are in place to deter debris
proliferation and damage to valuable space assets, this alone is not enough to effectively deal
with the environmental problem that is space debris.
The two examples considered in this chapter demonstrate the extent of the damage and
consequences of orbital collisions. In the case of the satellite collision, the issue arises regarding
who is to be held responsible and what steps need to be taken to prevent such an event from
reoccurring. While the international community is condemning China's actions, no regulatory
process is apparent to disincentivize nations from performing anti-satellite tests.
126
CHAPTER
8
"We are at a point in history where a proper attention to
space, and especially near space, may be absolutely
crucial in bringing the world together."
- MargaretMead
INTERNATIONAL & DOMESTIC U.S.
SPACE POLICY
Ever
8.1
Introduction
since the characteristic beeping sound of Sputnik I, the first Earth-orbiting artificial
satellite launched in 1957 by the Russians, could be detected by ham radio around the
globe, the way mankind viewed space would never be the same again. This watershed
moment marked the dawn of the space age and brought with it the beginning of a race for
security and prestige between two superpowers - the United States of America and the Soviet
Union. The grand prize of the race was won on July 20, 1969 when Neil Armstrong and Buzz
Aldrin, the first two humans to walk on the Moon, saluted the U.S. flag planted in the lunar
regolith.
Mankind's venture into space not only led to significant technological advances that transformed
how we live on Earth, but also opened a whole new realm for exploration and discovery. Since
the 1950s, space-based systems have illuminated our cosmos in ways never seen before,
shedding light on the answers to mankind's fundamental questions concerning our beginnings
and our place in the universe. It enabled us to visit other celestial bodies and explore foreign
worlds while accurately navigating our own with the help of satellite-based global positioning
systems.
Despite all the benefits reaped from space exploration, it has always carried an inherent factor of
risk. Such risk would apply to the well-being of both astronauts in space as well as Earthdwellers who may be exposed to falling space debris derived from space exploration alike and
also to space hardware with financial, environmental, and national security implications. A threat
127
Chapter 8: Introduction to Space Policy
to both human safety and hardware protection that has been receiving much attention lately is
that of space debris.
Now that we have introduced the topic of space debris, we turn to the areas of space policy and
space law that needs to be considered in more detail if one is to understand if and how said laws
and policy affect orbital debris.
8.2
Background on Space Law and Space Policy
Early on both Russia and the US, the space-fairing superpowers of the day, realized that an
effective space policy needed to be formulated to regulate the safe and responsible use of space.
It was with this realization, despite the ever-present threat that was the Cold War, that space
policy was developed and international space law introduced and ultimately ratified by
stakeholder nations. The following section focuses on space law that is in effect at this time as
well as the U.S. space policy as it stands today.
8.2.1
International Space Law
A key international entity in the realm of space policy and space law is the United Nations (UN)
Committee on the Peaceful Uses of Outer Space (UNCOPUOS). The Committee was first
established as an ad hoc Committee of the UN General Assembly by General Assembly
resolution 1348(XIII), adopted on December 13, 1958 and later confirmed as a permanent body
of the General Assembly through General Assembly resolution 1472 (XIV), adopted on
December 12, 1959 (Balough & Hedman, 2009).
The Committee was given the mandate to "review, as appropriate,the area of international
cooperation, and to study practical and feasible means for giving effect to programs in the
peaceful uses of outer space which could appropriately be undertaken under United Nations
auspices", as well as to "study the nature of legal problems which may arise from the
exploration of outer space". UNCOPUOS initially consisted of about twenty member states,
which enabled the Committee to reach consensus with relatively little effort. This resulted in the
128
Chapter 8: Introduction to Space Policy
adoption of as many as five UN Treaties between 1967 and 1979 (Masson-Zwaan, 2009,
Balough & Hedman, 2009). Early on UNCOPUOS realized that it had to focus both on scientific
and technical issues as well as legal issues to effectively carry out its mandate and this realization
lead to the creation of two subsidiary bodies, the Scientific and Technical Subcommittee and the
Legal Subcommittee.
From the 1980s onwards the COPUOS membership has grown to over seventy states, among
them many non-space-faring nations. The addition of these member states made reaching
consensus more difficult as not everyone shared the same space exploration objectives and led to
no further treaties being adopted from 1979 up to today. Thus the only treaties in existence today
are the five drafted during the 1960s and 1970s. These are:
- The Outer Space Treaty (ratified in October, 1967)
- The Rescue Agreement (1968)
- The Liability Convention (1971)
- The Registration Convention (1976)
- The Moon Treaty (1984)
The first three treaties were ratified by close to ninety states, the fourth by around fifty and the
last by only thirteen states (Masson-Zwaan, 2009). None of the treaties adequately addresses
orbital debris directly.
8.2.1.1
The Outer Space Treaty
Entered into force or agreement on October 10, 1967 and formally known as the Treaty on
Principles Governing the Activities of States in the Exploration and Use of Outer Space,
including the Moon and Other Celestial Bodies, the Outer Space Treaty is considered to be the
'Constitution' of space law. The main objective of the treaty is to establish a framework for
international space law, provide that space shall not be subject to national appropriation and that
129
Chapter 8: Introduction to Space Policy
exploration and use of space shall be for the benefit of all countries (Senechal, 2007).
Furthermore, the treaty limits military use of space.
The first and, therefore possibly, the most important principle of space law is contained in
paragraph 1 of Article I of the Outer Space Treaty. It provides that "the exploration and use of
outer space [...] shall be carried out for the benefit and in the interests of all countries [... } and
shall be the province of all mankind" (Masson-Zwaan, 2009). Thus it is clear that the use of
space should benefit all mankind without discrimination and on a basis of equality.
The second most important principle of space law is contained in Article II, which declares that
outer space and celestial bodies cannot be subject to appropriation by any means (MassonZwaan, 2009). This means that no country or private entity can claim ownership of any part of
outer space.
Lastly, in the context of space debris, it is necessary to mention Article IX of the Outer Space
Treaty, which says that states must avoid the contamination of celestial bodies and adverse
changes to the Earth (Masson-Zwaan, 2009).
8.2.1.2
The Rescue Agreement
Entered into force on December 19, 1967 and also known as the Agreement on the Rescue of
Astronauts, the Return of Astronauts and the Return of Objects Launched into Outer
Space, this treaty mainly deals with the legal status of astronauts in case of an accident. The
treaty sets forth rights and obligations of states concerning the rescue of persons in space. This
includes cases where, during off-nominal landings, astronauts end up in foreign or even hostile
territories. The treaty provides that state parties cannot deny astronauts the right to return to their
home state and obligates state parties to disclose information about astronauts in distress to the
launching authority and the Secretary General of the UN.
States are also obligated to provide all possible assistance to astronauts in the event of an
accident, distress or emergency landing. The treaty further establishes a procedure for returning
130
Chapter 8: Introduction to Space Policy
space objects found beyond the territorial limits of the launching authority (Senechal, 2007).
Seeing as this treaty does not really apply to the case of orbital debris, we do not consider it in
further detail.
The Liability Convention
8.2.1.3
Entered into force on September 1, 1971 and formally known as the Convention on
International Liability for Damage Caused by Space Objects, this treaty provides that the
launching State is liable for damage caused by its space objects on the Earth's surface or to
aircraft in flight and also to space objects of another State or property onboard such objects
(Senechal, 2007). It is a treaty that expands on the liability rules created in the Outer Space
Treaty of 1967. Due to relatively few accidents that involved space objects, the treaty has not
been invoked, though a crash of the nuclear-powered Soviet satellite Cosmos 954 in Canada in
1978 almost led to a claim under the Convention.
During 1979 the Skylab module crash-landed in Western Australia but with no injuries or severe
damage reported. The shire of Esperance in which territory Skylab fell, did fine the U.S.
Government $400 for littering but NASA never paid the fine. In 2008 a California DJ collected
donation from listeners and paid the Shire of Esperance on behalf of NASA (O'Neill, 2009). It
can be seen that that the Liability Convention may be invoked in the case of orbital collision
though the Convention does not explicitly deal with space debris.
8.2.1.4
The Registration Convention
Entered into force on November 12, 1974 and formally known as the Convention on
Registration of Objects Launched into Outer Space. The Convention provides that launching
States shall maintain registries of space objects and furnish specified information on each space
object launched, including details about the orbit of each space object, for inclusion in a central
UN register as well as at the national level (Senechal, 2007). The register is kept by the United
Nations Office for Outer Space Affairs (UNOOSA) and includes:
-
Name of launching State
131
Chapter 8: Introduction to Space Policy
-
An appropriate designator of the space object or its registration number
-
Date and territory or location of launch
-
Basic orbital parameters (Nodal period, Inclination, Apogee and Perigee)
-
General function of the space object
When considering the treaty in the light of orbital debris, it may be viewed as a tool for
categorizing new space hardware being introduced to orbit and serves as the first step in tracking
active and passive space objects, including debris.
8.2.1.5
The Moon Treaty
Entered into force on July 11, 1984 and also known as the Agreement Governing the Activities
of States on the Moon and Other Celestial Bodies, this treaty is the most recently adopted
space law that is still in effect today. It provides that the Moon and its natural resources are "the
common heritage of mankind" and that an international regime should be established to govern
the exploitation of such resources when such exploitation is about to become feasible (Senechal,
2007). As in the case of the Rescue Agreement, this treaty is not applicable to orbital debris and
will not be discussed in further detail.
When considering the five conventions that make up international space law one cannot help but
notice that while certain aspects may be applied to the special case of space debris, no specific
laws exist to address the growing problem of space debris and to enforce mitigation strategies to
effectively reduce the creation of debris and the frequency of orbital collisions. This is a key
point that will be addressed further in the thesis. Next we turn to international space policy that
may be relevant in the space debris discussion.
8.2.2
International Space Policy on Orbital Debris
Since the 1980s, several sets of 'Principles' in the form of non-binding UN Resolutions related to
space policy have been adopted on several topics. Specifically applicable to orbital debris,
COPUOS adopted the UN Space Debris Mitigation Guidelines in 2007 on the basis of guidelines
132
Chapter 8: Introduction to Space Policy
adopted earlier by the IADC (Inter-Agency Space Debris Coordination Committee), an
international governmental forum for the worldwide coordination of activities related to the
issues of man-made and natural debris in space (Masson-Zwaan, 2009). These Space Debris
Mitigation Guidelines may be summarized as follows:
(1) Limit debris released during normal operations.
(2) Minimize the potential for break-ups during operational phases.
(3) Limit the probability of accidental collision in orbit.
(4) Avoid intentional destruction and other harmful activities.
(5) Minimize the potential for post-mission break-ups resulting from stored energy.
(6) Limit the long-term presence of spacecraft and launch vehicle orbital stages in LEO after
the end of the mission.
(7) Limit the long-term interference of space- craft and launch vehicle orbital stages within
the GEO region after the end of the mission.
While these guidelines are useful for reducing the rate of growth of orbital debris, all mitigation
efforts that comply with the guidelines set forth by both COPUOS and IADC are entirely
voluntary and no accountability is required by any State (Balogh & Hedman, 2009). This means
that many present day space-faring nations do not always comply with the guidelines set out
above, thus, debris mitigation practices are not followed by all nor actively enforced.
Nations that only recently joined the ranks of space travelers, argue that the majority of space
junk in orbit today was caused by the U.S. and the USSR during the last half century, where each
contributed approximately 40% of the total amount of space debris (Senechal, 2007), and that
they should therefore be held responsible while the more recent space fairing nations should be
allowed additional leeway to 'fill their reserve of debris quota'. This approach will ultimately
only exacerbate the problem and speed up the accumulation of space debris in orbit. Nonetheless,
133
Chapter 8: Introduction to Space Policy
the allocation of responsibility for current debris clouds should be taken into consideration when
formulating a solution for this problem.
Next we turn to U.S. Space Policy to investigate how the problem of space debris is viewed by
the leading space-fairing nation of our time.
8.2.3
Current U.S. Space Policy
In 2008 the Massachusetts Institute of Technology's Space, Policy and Society Research Group
released a whitepaper on "The Future of Human Spaceflight". This document is basically a call
to re-examine former president Bush's Vision for Space Exploration with the aim of revamping
and extending it in light of U.S. presidential elections (Mindell et al., 2009). The MIT
researchers recommend that:
1.
The Space Shuttle should be retired in 2010 as planned.
2.
The International Space Station should be used by the U.S. and its international
partners through 2020 to support human spaceflight research.
3.
The Bush Vision of Moon exploration should be clarified and expanded so that it is
"more, and not less ambitious." The MIT Report does not advocate deemphasizing
lunar surface infrastructure in favor of a Mars program thrust, but it does recommend
that the Moon vs. Mars issue be specifically examined.
4.
International partnerships should be expanded because they are the optimal way to
focus U.S. and global assets on an ambitious, long-term program of human
exploration of the solar system.
The report goes on to say that we find ourselves in the threshold of a new era and that, within a
deep recession, the Obama administration will make the most important decision in U.S. human
134
Chapter 8: Introduction to Space Policy
spaceflight in a generation (Mindell et al., 2009). The report also urges Congress and the White
House to reduce the "too much with too little" pressure on NASA by ensuring that resources
match expectations, to strengthen international relationships and for the U.S. to retain its global
leadership in human spaceflight but lead in innovative ways.
It would seem that the report did not go unnoticed, for during his speech at Kennedy Space
Center on April 15, 2010, President Barack Obama made the following statement:
"Ffty years after the creation of NASA, our goal is no longerjust a destination to
reach. Our goal is the capacityfor people to work and learn and operate and live
safely beyond the Earthfor extended periods of time, ultimately in ways that are
more sustainable and even indefinite. And in fufilling this task, we will not only
extend humanity's reach in space - we will strengthen America's leadership here on
Earth."
-
PresidentBarack Obana,April15, 2010
This statement was influenced by the president being briefed on the recommendations set forth
by the Review of U.S. Human Spaceflight Plans Committee, more widely known as the
Augustine Committee, named after Committee Chairman Norman Augustine (The Committee's
final report was presented in Washington on October 22, 2009).
While not explicitly mentioned, this goal of enabling people to live beyond the Earth can only be
accomplished if the growing threat of space debris is reduced in time to prevent certain orbits
from becoming inaccessible to humans due to hypervelocity objects careening through space in
an unpredictable fashion. With the White House's June 28, 2010 release of the National Space
Policy of the United States of America, President Obama again makes clear his intentions to
establish a long-term human presence beyond Earth's orbit and he also makes mention of the fact
that decades of space activity have littered Earth's orbit with debris and that as the world's
space-faring nations continue to increase activities in space, the probability of collisions
increases correspondingly (U.S. Office of the Press Secretary, 2010).
135
Chapter 8: Introduction to Space Policy
President Obama's space policy includes the following principles (U.S. Office of the Press
Secretary, 2010):
1.
It is in the shared interest of all nations to act responsibly in space to help prevent
mishaps, misperceptions and mistrust. The U.S. considers the sustainability, stability,
and free access to, and use of, space vital to its national interests. Space operations
should be conducted in ways that emphasize openness and transparency.
2.
A robust and competitive commercial space sector is vital to continued progress in
space. The U.S. is committed to encouraging and facilitating the growth of a U.S.
commercial space sector that supports U.S. needs, is globally competitive, and
advances U.S. leadership in the generation of new markets and innovation-driven
entrepreneurship.
3.
All nations have the right to explore and use space for peaceful purposes, and for the
benefit of all humanity, in accordance with international law. Consistent with this
principle, "peaceful purposes" allows for space to be used for national and homeland
security activities.
4.
As established in international law, there shall be no national claims of sovereignty
over outer space or any celestial bodies. The U.S. considers the space systems of all
nations to have the rights of passage through, and conduct of operations in, space
without interference.
Purposeful
interference
with space systems,
including
supporting infrastructure, will be considered an infringement of a nation's rights.
5.
The U.S. will employ a variety of measures to help assure the use of space for all
responsible parties, and, consistent with the inherent right of self-defense, deter others
136
Chapter 8: Introduction to Space Policy
from interference and attack, defend our space systems and contribute to the defense
of allied space systems, and, if deterrence fails, defeat efforts to attack them.
Consistent with these principles, the National Policy report includes a set of goals to pursue in its
national space programs (U.S. Office of the Press Secretary, 2010):
1.
Energize competitive domestic industries to participate in global markets and
advance the development of: satellite manufacturing; satellite-based services; space
launch; terrestrial applications; and increased entrepreneurship.
2.
Expand international cooperation on mutually beneficial space activities to:
broaden and extend the benefits of space; further the peaceful use of space; and
enhance collection and partnership in sharing of space-derived information.
3.
Strengthen stability in space through: domestic and international measures to
promote safe and responsible operations in space; improved information collection
and sharing for space object collision avoidance; protection of critical space systems
and supporting infrastructures, with special attention to the critical interdependence of
space and information systems; and strengthening measures to mitigate orbital debris.
4.
Increase assurance and resilience of mission-essential functions enabled by
commercial, civil, scientific, and national security spacecraft and supporting
infrastructure against disruption, degradation, and destruction, whether from
environmental, mechanical, electronic, or hostile causes.
5.
Pursue human and robotic initiatives to develop innovative technologies, foster
new industries, strengthen international partnerships, inspire our Nation and the
137
Chapter 8: Introduction to Space Policy
world, increase humanity's understanding of the Earth, enhance scientific discovery,
and explore our solar system and the universe beyond.
6.
Improve space-based Earth and solar observation capabilities needed to conduct
science, forecast terrestrial and near-Earth space weather, monitor climate and global
change, manage natural resources, and support disaster response and recovery.
Goal number 3 above is of particular interest as it explicitly defines the U.S. space policy with
regard to orbital debris mitigation. The policy report further delves down into the topic of
responsible use of space and preserving the space environment, stating that the United States
will:
-
Lead the continued development and adoption of international and industry standards and
policies to minimize debris, such as the United Nations Space Debris Mitigation
Guidelines;
-
Develop, maintain, and use space situational awareness (SSA) information from
commercial, civil, and national security sources to detect, identify, and attribute actions in
space that are contrary to responsible use and the long-term sustainability of the space
environment
-
Continue to follow the United States Government Orbital Debris Mitigation Standard
Practices, consistent with mission requirements
and cost effectiveness,
in the
procurement and operation of spacecraft, launch services, and the conduct of tests and
experiments in space
-
Pursue research and development of technologies and techniques, through the
Administrator of the National Aeronautics and Space Administration (NASA) and the
Secretary of Defense, to mitigate and remove on-orbit debris, reduce hazards, and
increase understanding of the current and future debris environment
138
Chapter 8: Introduction to Space Policy
-
Require the head of the sponsoting department or agency to approve exceptions to the
United States Government Orbital Debris Mitigation Standard Practices and notify the
Secretary of State.
-
Foster the Development of Space Collision Warning Measures. The Secretary of
Defense, in consultation with the Director of National Intelligence, the Administrator of
NASA, and other departments and agencies, may collaborate with industry and foreign
nations to:
o
maintain and improve space object databases
o pursue common international data standards and data integrity measures
o provide services and disseminate orbital tracking information to commercial and
international entities, including predictions of space object conjunction.
It is clear from the White House report that the Obama administration intends to promote the
commercial space sector substantially while renewing efforts to mitigate on-orbit debris. It is
however important to note that no word is mentioned about actively enforcing debris mitigation
procedure compliance on a national level. With the expected increase in commercial spaceflight
activity, it is reasonable to expect that the rate at which new debris is currently being introduced
to orbit will only increase in the future unless substantial measures are taken to prevent further
debris generation and to reduce the debris already present around the Earth.
8.2.4
Current NASA Policy
NASA follows a set of mandatory guidelines contained in an official agency document known as
NASA Procedural Requirements (NPR) for Limiting Orbital Debris Responsible Office: Office
of Safety and Mission Assurance (NASA NPR 8715.6A, 2008). The document contains rules and
procedures that fall in line with the broader U.S. space policy as set forth by the executive branch
of the U.S. government and is applicable to NASA headquarters as well as all the NASA centers.
139
Chapter 8: Introduction to Space Policy
The purpose of this NASA NPR is to "provide requirements to implement NASA's policy for
limiting orbital debris generation per the U.S. National Space Policy of 2006, Section 11, the
U.S. Government OrbitalDebris Mitigation StandardPractices,and as a part of NASA's policy
for safety and mission assuranceprograms as defined in NASA Policy Directive (NPD) 8700.1,
paragraph ]a ". While this NPR has not yet been updated to encompass the new U.S. space
policy released during June of 2010, the trend would be similar to that set forth by the previous
administration.
This brings us to the next important point touched on in both the MIT and White House reports,
namely the new trend of commercialization of space and space tourism rapidly gaining ground
and support on a national level. The next section briefly looks at recent developments in this
area.
8.3
Advent of Commercial Spaceflight
Arguably the most exciting moment to date in the area of commercial (human) spaceflight
occurred on June 21, 2004 when Burt Rutan's aviation company known as Scaled Composites
made history by achieving the first privately funded human spaceflight with its SpaceShipOne
spaceplane. On October 4, another entry for the history books occurred when it won the $10
million Ansari X PRIZE by achieving 100 km in altitude twice in two consecutive weeks. This
watershed moment proved that nongovernmental organizations (NGOs) could reach great heights
(literally!) without the size and budget of a big, bureaucratically tied-down government agency.
SpaceShipOne has since been acquisitioned by Richard Branson who started the company Virgin
Galactic with the aim of selling suborbital flights to space tourists. Final testing on the next
generation spaceplane, SpaceShipTwo, is currently underway and within the near future many
other companies will be joining this novel market.
Today the space private sector is growing at a rapid pace and companies like SpaceX, Bigelow
Aerospace, Armadillo Aerospace, Arianespace, SeaLauncher and Kistler have made great strides
140
Chapter 8: Introduction to Space Policy
in establishing themselves in this market. Projections of future growth in suborbital space
tourism passenger demand alone are exponential in shape for a period reaching up to 2021 as
shown in Figure 45. This expected growth in suborbital space tourism is bound to expand to
orbital and further destinations as these companies grow and develop farther-reaching
technologies.
16,000
14,000
12,000
10,000
8,000
6,000
4,000
2,000
0
I
2006 2007 2008 2009 2010 2011 2012 2013 2014 2015 2016 2017 2018 2019 2020 2021
Figure 45: Estimated growth of passenger demand for suborbital space tourism over the next decade
(extracted from Suborbital Space Tourism Demand Revisited (Futron, 2006)).
In addition to this increase in space activity, the world satellite market is growing with almost
300 new launches per year (Senechal, 2007), space operations conducted by rising space nations
like India and China are increasing and new space-fairing nations are bound to emerge. It is
therefore not far-fetched to assume that, unless significant steps are taken in the immediate
future, space debris would also increase exponentially, significantly increasing the threat to
human safety and operational space systems.
141
Chapter 8: Introduction to Space Policy
8.4
Conclusion
This chapter focused on the international space laws in effect today as set up by the UN and how
they apply to the problem of orbital debris. It was found that while certain laws like the Liability
Convention could potentially be applied to cases where debris resulted in damage, no law exists
that specifically regulates space debris.
Both international and U.S. space policy recognizes the threat associated with orbital debris and
while both frameworks set forth guidelines to address the issue, compliance by government
agencies and private entities alike are purely voluntary and no accountability measures exist.
In addition to rising space nations like India and China, the advent of commercial spaceflight
will lead to significantly more space debris unless effective mitigation strategies are introduced.
142
CHAPTER
9
"The ultimate test of man's conscience may be his
willingness to sacrifice something today for future
generations whose words of thanks will not be heard."
- GaylordNelson
POLICY DISCUSSION & CONCLUSIONS
Introduction
9.1
pace debris is a serious environmental problem with substantial economic, safety and
international policy implications. Unless acted upon as a first priority, the space debris
treat is bound to grow exponentially and may seriously jeopardize mankind's future
space endeavors, safety or even the ability to reach beyond Earth orbit.
9.1.1 Shortcomings of the Current Space Debris Policy Framework
It has been shown throughout the previous two chapters that the current international space
policy framework, while broadly encompasses orbital debris, does not specifically address it.
Technical mitigation strategies exist to limit and reduce debris proliferation but are not
implemented by all space-users. The framework has the following problems when it comes to
effectively addressing orbital debris:
-
Non-quantifiable
-
Non-enforceable
-
Not taken seriously by all stakeholders
9.1.1.1 Non-Quantifiable
Stakeholder participation is not measured effectively and so inhibits the ability of determining
responsibility/accountability for space debris.
143
Chapter 9: Policy Discussion & Conclusions
9.1.1.2 Non-Enforceable
Existing treaties are vague and open to interpretation. None of them directly address the detailed
issue of space debris.
9.1.1.3 Not Taken Seriously
As was seen from the second example that covered China's ASAT test, nations consider the
reduction of orbital debris secondary to profits, prestige, and scientific and military
achievements.
It is in the light of these shortcomings that we investigate possible analog policy architectures
and propose a set of recommendations that may enhance the efficacy of debris mitigation.
9.2
OBJECTIVE: New Policy Architecture Recommendations
9.2.1 Stakeholders and Intended Audience
First and foremost, the stakeholders that are to be considered during the recommendation
drafting process need to be identified. The relevant stakeholders include:
144
-
International and federal policy makers
-
Regulatory bodies and international organizations like the United Nations
Governments - specifically space-fairing nations like the U.S., E.U., Russia, and China
-
The commercial satellite industry
-
Military & scientific space users
-
The private space sector
-
Satellite insurance companies
-
Technical experts in the field of debris mitigation
-
Environmental groups that focus on the Earth's surrounding orbits
Chapter 9: Policy Discussion & Conclusions
The recommendations will affect each of these groups and though the policy decisions will be
made on the national and international regulatory level, each stakeholder needs to be considered
for this effort to be successful.
9.2.2 Antitrust Issues
It is worth mentioning that various degrees of antitrust may manifest itself within the realm of
the debris regulatory process. First, reiterating a statement made earlier in the policy section of
this thesis, countries that only recently joined the ranks of the space-fairing nations, may insist
that, should debris mitigation efforts be made mandatory, they would be placed at a competitive
disadvantage with respect to more established space nations such as the U.S. and Russia. In
forging new debris policy standards, this should be taken into account.
A second area where antitrust may be present is between emerging private space companies.
Unless regulated on an international level, certain governments may require more stringent
compliance to debris mitigation guidelines while other countries do not, this placing the former
constituent companies at a competitive disadvantage, resulting in them being unilaterally pushed
out of the market. Such behavior may lead to companies moving abroad to 'debris haven'
countries where debris mitigation is not enforced.
9.3
Policy Architecture Analysis
One effective way of evaluating a certain policy architecture is by comparing it to policy
frameworks in other fields that are similar in their application. The orbit around the earth is a
common property resource and this categorizes it in the same area as crude oil, international
fishing grounds, and air pollution.
145
Chapter 9: Policy Discussion & Conclusions
9.3.1 Tragedy of the Commons
Earth orbit is the perfect example of the tragedy of the commons. At present no overhead fee
exists for utilizing space that results in the existence of an externality. Stakeholders, that include
nations, government agencies and the private space sector, will continue to use space until the
marginal cost associated with its use equals the marginal rate of return generated from space
activities. While space is a common property resource that benefits all parties, orbital debris has
a social cost that affects every stakeholder equally. Unless a concerted effort is carried out
through the collaboration of multiple stakeholders, this cost associated with debris will increase
to the point where the usage of space is no longer viably profitable.
9.3.2 Comparison with Common Resource and Pollution Policies
Table 6 presents a comparison between various domestic U.S. and international common
resource treaties. The U.S. plays a prominent role in each of these cases despite the fact that it
has not ratified the Kyoto Protocol and, while assisting with the Law of the Sea Treaty enactment
and signing of its 1994 Agreement on Implementation, did not ratify this treaty either.
146
Chapter 9: Policy Discussion & Conclusions
Table 6: Comparison between space debris mitigation, common resource
Incentive
Treaty
Year ratified/ came
and pollution management policies
International
Crude Oil
Space Debris
Carbon
Mitigation
Emission
Pollution
Fishing
Policies
Trading
Management
Grounds
None
Economic
$75 million
Economic
incentive to trade
fine + clean
incentive to
carbon permits
up cost
comply
None (Outer Space
Kyoto Protocol
Oil Pollution
Law of the
Treaty closest)
(International)
Act
Sea Treaty
1967
2005
1990
1994
Yes
No
Yes, U.S.-
No
into force
Ratified by the U.S.
instituted
Reference
UNCOOSA, 2010
UNFCCC, 2010
EPA, 2009
UN, 2010
Four key takeaways from this comparison are:
1.
Unlike any of the other treaties/legislations, the space mitigation policies do not
create an economic incentive for stakeholders to comply with the mitigation
guidelines. While this might be the case for government agencies such as NASA that
is regulated by the federal government, private space tourism and satellite companies
are not bound by this policy.
2.
In all cases a treaty or protocol was created to deal with a specific common resource
threat. Not so in the case of space debris. The Outer Space Treaty is currently the
closest legislation that may be applied to space debris, though it does not address it
specifically nor does it enforce compliance.
3.
The United States did not ratify two of these conventions, namely the Kyoto Protocol
and the Law of the Sea Treaty - both areas that may have a negative impact on
current U.S. market share in the global market, should the U.S. be constrained by
147
Chapter 9: Policy Discussion & Conclusions
these treaties. This analog suggests that the U.S. may choose not to ratify a newly
proposed space debris mitigation treaty should it in any way limit the U.S.'s activities
in space. A similar argument could be made for other countries such as Russia or
China.
4.
Freshly joined space-fairing nations may disagree on the distribution of debris
compensation, arguing that nations like the U.S. and Russia should be held
responsible for a larger percentage of debris. This view is analogous to arguments
between third world and developed nations regarding greenhouse warming and
carbon emission trading and is related to the antitrust issue mentioned in the previous
section
9.4
Policy Framework Recommendations
In the light of the previous two chapters as well as the preceding sections of this chapter, the
following policy framework recommendations are presented.
9.4.1 Recommendation #1: Exhort Insurers to Adopt a Bond System
A key factor in inhibiting future debris proliferation is lies in addressing the expected boom in
commercial space flight. Governments are advised to work with space insurance companies to
formulate a bond system that may be employed to enforce debris mitigation practices.
Involvement of the federal government will insure that insurance premiums aren't pushed too
high while at the same time creating an incentive for stakeholders to comply with mitigation
guidelines in order to qualify for subsidized insurance premiums.
The proposed bond system may be set up in such a way that if a launching company can prove
that it has complied with all mitigation guidelines and, after its useful life, safely discarded of a
dead satellite by either de-orbiting/re-orbiting it, said company may receive a substantial rebate.
This proposed solution would create an economic incentive for commercial and private sector
148
Chapter 9: Policy Discussion & Conclusions
stakeholders - players who would under normal circumstances not be compelled to act - to
mitigate debris generation.
9.4.2 Recommendation #2: Facilitate Debris X-Prize Competition
The roaring success of the Ansari X-prize competition that led to the creation of SpaceShipOne,
serves as inspiration for a similar competition in the area of orbital debris mitigation and
reduction. Possible contribution of federal government funding may facilitate the timely
execution of such a competition, stimulate innovation and inspire bright minds to design, build
and test debris cleanup systems.
Such a competition may result in the long term contracting of orbital 'garbage trucks' - either
automated or manually operated - to clean up rubble from key orbits. Governments may invite
bids and select the cheapest contractor to perform the cleanup operations or alternatively create a
"bounty hunter" market for debris cleanup, providing compensation on a $/lbs basis. Cost may
be covered either by the federal government, or divided according to users that benefit from the
orbit that is being clean, or, if identifiable, the country from there the debris originated may be
liable to pay up.
9.4.3 Recommendation #3: Tailor an International Treaty to Meet
the Needs of all Stakeholders
As was seen in chapter 7, creating a new international treaty that focuses explicitly on orbital
debris may prove difficult. Not only do all member states have to be in agreement, but also
ratifying said treaty does not guarantee that it will come into force. The antitrust issue again
comes into play.
Furthermore, regulating rogue countries like Iran and North Korea, notorious for defying
international sanctions related to nuclear weapon development and destabilizing surrounding
149
Chapter 9: Policy Discussion & Conclusions
regions, may prove hard to do. The treaty would be ineffective if member states that overstep
their bounds in space get away with it without any penalty.
Barriers to entry by established space-fairing nations and companies may deter newer/non-flying
nations from agreeing to a treaty that hold no benefit to them.
The incentives of profits, prestige and scientific achievements vis-A-vis the disincentives of being
fined for non-compliance all need to be taken into account when drafting such a treaty.
Lastly, unless each regulated by its own member state, commercial satellite (comsat) companies
may avoid the additional cost associated with debris mitigation. One solution to such a problem
would be to incorporate the jurisdiction of the International Telecommunications Union or ITU
to regulate spectrum allocations of comsats and remote sensing satellites. Similarly the FCC and
FAA (and their equivalent international counterparts) may be tasked with licensing the launches
of commercial space flight vehicles - only once compliance to debris mitigation guidelines has
been proven.
9.4.4 Recommendation #4: Foster Research to Upgrade Debris
Monitoring System
Current radar technology allows for the tracking of debris fragments 5 cm and up. The range of
debris sizes that prove most dangerous is between 1 and 5 cm so it would be beneficial to
enhance the resolution of both ground and space-based radar systems. By funding research
efforts with this goal in mind, 'space situational awareness' may be increased significantly and
the U.S. Space Command Catalog upgraded for monitoring current debris of even smaller sizes.
International collaboration in this area may also produce a space traffic management that can
provide early warning of impending impacts and better allocate safe orbits to newly launched
space hardware.
150
Chapter 9: Policy Discussion & Conclusions
9.4.5 Recommendation
#5:
Actively
Promote
Mitigation
&
Protection Strategies
Considered to complement recommendations #1 and #3, this recommendation is for seasoned
stakeholders including long-term space-faring entities and government agencies such as NASA
to transfer space system protection know-how and experience to younger entities such as the
emerging space tourism sector in an effort to better protect space systems, thus preventing
unwanted further debris generation. Concepts for protecting against the current debris cloud
would include shielding, carrying additional fuel onboard for de-orbiting/re-orbiting, and onorbit maneuvering.
9.5
Conclusion and Summary of Contributions
This section of the chapter provides a summary of the initial thesis questions and hypotheses as
well as a summary of the contributions made with this work.
9.5.1 Problem Statement
In the light of a significant increase in orbital activity, space debris together with the likely onset
of the Kessler effect presents a real threat to space operations and continued safe access to all
orbits.
9.5.2 Thesis Question
What mitigation, regulatory and international space policy strategies are currently in place to
address the space debris problem?
5 Treaties exist today but none explicitly address the issue of debris.
Are these measures effective in mitigating the problem?
No, all treaties are vague and may be appliedto debris but none can be enforced.
If not, what could be done to improve them?
151
Chapter 9: Policy Discussion & Conclusions
Space laws need to be refined to explicitly address the accountability and mitigation aspects
relatingto the debris environment.
9.5.3 Hypotheses
Hypothesis 1
No clear set of space policy regulations are actively being enforced to regulate the
ownership and decommissioning of redundant orbiting spacecraft, satellites and associated
debris.
Hypothesis accepted.
Hypothesis 2
A combination of technical mitigation techniques and clear international policy
strategies/legislation is needed for the space industry to limit further debris growth.
Hypothesis accepted
9.5.4 Study Methodology
A review of literature, current legislation and international law pertaining to the regulation of
space debris and prevention of orbital collisions was performed.
Two examples were considered - In each case the stakeholders, politics, policies, regulations and
consequences of the collision was discussed:
1.
February 2009 collision between defunct Russian Cosmos spacecraft and commercial
Iridium satellite (Masson-Zwaan, 2009).
2.
China's display of technological prowess during the January 2007 intentional demolition
of its inactive Fengyun-1C weather satellite using a SC-19 anti-satellite (ASAT) missile
(Leonard, 2009).
152
Chapter 9: Policy Discussion & Conclusions
Recommendations for alternative preventative and regulatory strategies in debris mitigation were
set forth.
9.5.5 Summary of Contributions
The following contributions were made with the policy section of this thesis:
-
Review of current international and U.S. space law and policies regulating space debris.
-
Identification of gaps in the general legal framework for space activities under public
international law.
-
Review of past, current, and proposed future countermeasures for on-orbit collisions and
space debris.
-
9.6
Recommendation of a set of debris reduction strategies for worldwide implementation.
Limitations and Future Work
This analysis focused on manmade debris with the realization that meteoroid modeling may
contribute to a more complete picture of the orbital debris environment.
The space policy section of this thesis focused on international space law and national space
policy of the United States. An in-depth analysis of other space-faring nations such as Europe
and Russia is beyond the scope of this work but may be very insightful as a next step.
Future work may include more extensive comparisons to equivalent policy regulating common
resources such as deforestation, recycling strategies etc.
153
Chapter 9: Policy Discussion & Conclusions
Final Remarks
The harsh environment of space may seem formidable at times and while there will always
remain some degree of inherent risk associated with space travel, we as a species are not deterred
from breaking away from this planet to explore and exploit the vastness that surrounds us. I have
full confidence that our human ingenuity will overcome any and all obstacles, be it injury
sustained during space travel or space debris posing a threat, for we arefearfully and wonderfully
made (Ps. 139:14).
154
ASTRONAUT INJURY REFFERENCES
Ansari RR, Jones JA, Pollonini L, Rodriguez M, Opperman RA, Hochstein J. A non-invasive
Miniaturized-Wireless Laser-Doppler Fiber-Optic Sensor for Distal Fingertip Injuries in
Astronauts, SPIE Proceedings Paper, Vol 7186 (2009).
Cadogan D, Bradley D, Kosmo J. Spacesuit Glove Manufacturing Enhancements through the use
of Advanced Technologies. National Aeronautics and Space Administration: 1993;
Astronomy Database Journal ISSN 0148-7191, 00/1993.
Cadogan D, Graziosi D. Recent Advances in the Development of Spacesuit Gloves. SAE Paper
961424, International Conference on Environmental Systems, Monterey, CA, July 1996.
Cernan G, Davis D. The Last Man on the Moon, Published by St. Martin's Press, New York.
(1999)
Chaikin A. A Man on the Moon, Published by Penguin Books, Australia; 1998:233-84.
De Witt JD, Jones J. Evaluation of the Hard Upper Torso Shoulder Harness (No. NASA/TP2007-214753) (2007).
Dionne S. Evaluationof the Orlan-DMA Space Suit Assembly. Project Engineer EMU Program
presentation at Hamilton Sundstrand Space Systems International, 23 Dec 1994.
Eckart P. Spaceflight Life Support and Biospherics. Kluwer Academic Publishers, Dordecht,
(1996).
Gernhardt M. ExtravehicularActivities (EVA) andPressurizedRovers. Paper presented at the
AIAA Space 2007 Exploration Systems Mission Directorate - Lunar Architecture
Update.53-57. (2007).
Gernhardt M.L., PhD., Project Scientist, EVA Physiology, Systems & Performance (EPSP)
Project at Johnson Space Center Head, Environmental Physiology Laboratory at JSC,
Personal Correspondence, Human Research program Investigation Workshop, League
City, TX, Feb 3 (2009).
Graziosi D, Ferl J, Splawn K. Development of a Space Suit Soft Upper Torso Mobility/Sizing
Actuation System. Paper presented at the SAE International Conference on
Environmental Systems. Doc no. 2004-01-2342 (2004).
Graziosi D, Ferl J, Splawn K. Evaluation of a Rear Entry System for an Advanced Spacesuit.
Paper presented at the SAE International Conference on Environmental Systems. (2005).
155
Astronaut Injury References
Graziosi D, Stein J, Ross A, Kosmo J. Phase VI Advanced EVA Glove Development and
Certification for the International Space Station. Society of Automotive Engineers, 200101-2163, (2001).
Harris G. The Origins and Technology of the Advanced Extravehicular Space Suit, AAS History
Series, American Astronautical Society, San Diego, (2001).
Hochstein J. Astronaut Total Injuries Database and Finger/Hand Injuries during EVA Training
and Tasks, Individual Project Report, M.Sc. Space Studies, Strasbourg, France:
International Space University, (2008) 3-23.
Holloway GA, Watkins DW, Laser Doppler Measurement of Cutaneous Blood Flow. The
Journal of Investigative Dermatology, (1977) 69:306-309.
Holzbaur KR, Murray WM, Delp SL. A Model of the Upper Extremityfor Simulating
Musculoskeletal Surgery andAnalyzing Neuromuscular Control. Annals of Biomedical
Engineering, Vol. 33, No. 6 (2005) pp. 829-840
Johnson BJ, Cupples JS, Williams D. Results from an Investigationinto Extra-Vehicular Activity
(EVA) Training-RelatedShoulder Injuries. Paper presented at the Space 2004 Conference
and Exhibit. (2004).
Jones E, Schmitt H. Pressure Suit Requirements for Moon and Mars EVAs. In: Space '92
Proceedings, American Society of Civil Engineers, Paper number LA-UR-91-3083,
Denver, Colorado, (1992).
Jones J.A., MD, MS, FACS, Medical Officer/Flight Surgeon, NASA Johnson Space Center,
Houston, TX, Personal communication, 15 March 2009,
Jones JA, Hoffman RB, Harvey CM, Bowen CK, Hudy CE, Strauss S, Gernhardt ML,
Mechanisms of Injury and Countermeasures for EVA Associated Upper Extremity
Medical Issues: Extended Vent Tube Study, Acta Astronautica (2008).
Jones R, Graziosi D, Splawn K, Ferl J. Development of a Space Suit Soft Upper Torso
Mobility/Sizing Actuation System with Focus on Prototype Development and Manned
Testing. Paper presented at the SAE International Conference on Environmental Systems.
Doc no. 2007-01-3169 (2007).
Lee S.M.C., M.S., Wyle Laboratories, Houston, TX, Personal Communication, 25 Jan 2001.
NASA. The Vision for Space Exploration. Washington, DC. (2004).
Newman D, Barratt M. Life Support and Performance Issues for Extravehicular Activity (EVA).
In: S. Churchill, 0. Heinz, eds. Fundamentals of Space Life Sciences, Chapter 22,
Krieger Publishing Company; 1997:355-64.
156
Astronaut Injury References
Newman D, Schmidt P, Rahn D. Modeling the ExtravehicularMobility Unit (EMU) Space Suit:
PhysiologicalImplicationsfor ExtravehicularActivity (Eva). Paper presented at the SAE
International Conference on Environmental Systems. Doc no. 2000-01-2257. (2000).
Newman D. Life in Extreme Environments: How Will Humans Perform on Mars? Gravitational
and Space Biology Bulletin 2000; 13(2):35-48.
Opperman RA, Waldie JM, Natapoff A, Newman DJ, Hochstein J, Pollonini L, Ansari RR, Jones
JA. Anthropometric and Blood Flow Characteristics Leading to EVA Hand Injury.
Proceedings of the 39th International Conference on Environmental Systems (ICES);
2009 July 12-16; Savannah, GA: Society of Automotive Engineers; 2009:1-8.
Opperman RA, Waldie JM, Natapoff A, Newman DJ, Jones JA. Statistical Analysis of SuitInduced Fingernail Trauma in U.S. Astronauts. (Paper in draft for the Journal of
Aviation, Space, and Environmental Medicine - Sept 2009).
Opperman RA, Waldie JM, Newman DJ, Natapoff A. EVA Injury, Comfort and Protection:
Improving the Plight for the Hand and Shoulder for the Constellation Program. Poster
presented at the 38th International Conference on Environmental Systems (ICES); 2008
June 29-July 3; San Francisco, CA: Society of Automotive Engineers; 2008.
Pheasant S. Bodyspace: Anthropometry, Ergonomics, and the Design of Work, 2 nd edition,
Taylor and Francis, Bristol, (2006) p. 84
Scheuring RA, Jones JA, Polk JD, Gillis DB, Schmid J, Duncan JM, Davis JR, Novak JD. The
Apollo Medical Operations Project: Recommendations to Improve Crew Health and
Performance for Future Exploration Missions and Lunar Surface Operations, Technical
Memorandum NASA/TM-2007-214755 (2007) 2-9.
Scheuring RA, Mathers CH, Jones JA, Wear ML. Musculoskeletal injuries and minor trauma in
space: incidence and injury mechanisms in U.S. astronauts, Aviat Space Environ Med
2009; 80: (2009) 1-8.
Shepherd C, Lednicky C.EVA Gloves: History, Status and Recommendations for Future NASA
Research. Lockheed Engineering and Sciences Company, NASA JSC-23733, (1990).
Sietzen F. The Future of Spacesuits [online]. Available from:
http://www.space.com/scienceastronomy/ generalscience/spacesuits.html [Accessed 30
January 2009], (1999).
SIMM 4.0: Software for Interactive Musculoskeletal Modeling User's Manual. June, 2004.
Sorenson EA, Sanner RM, C.U. Ranniger, Experimental Testing of a Power-Assisted Space Suit
Glove Joint, IEEE International Conference on Systems, Man and Cybernetics, Orlando,
FL, (1997) 2619-25.
157
Astronaut Injury References
Splawn K. Senior Glove Design Engineer, ILC Dover, Frederica, DE, Personal Communication,
15 Jan 2009.
Strauss S, Krog RL, Feiveson AH. Extravehicular Mobility Unit Training and Astronaut Injuries,
Aviat Space Environ Med 76-5 (2005) 469-474.
Strauss S. Extravehicular mobility unit training suit symptom study report, Technical Report
NASA/TP-2004-212075, Lyndon B. Johnson Space Center Houston, Texas, USA (2004)
13-22.
Tanaka K, Waldie J, Steinbach GC, Webb P, Tourbier D, Knudsen J, Jarvis CW, Hargens AR.
Skin microvascular flow during hypobaric exposure with and without a mechanical
counter-pressure space suit glove. Aviat Space Environ Med (2002); 73: 1074-8.
Viegas SF, Williams D, Jones D, Strauss S, Clark J. Physical Demands and Injuries to the Upper
Extremity Associated with the Space Program, J Hand Surg 2004; 29A, (2004) 359-366.
Waldie J. The Viability of Mechanical Counter Pressure Spacesuits, Doctoral Thesis, RMIT
University. (2005) Ph.D.
Waldie JM. Mechanical CounterPressureSpace Suits: Advantages, Limitations and Concepts
[online]. In: 5th NSSA Australian Space Science Conference: 14 to 16 September 2005
Hosted by RMIT University, Melbourne, Australia; (2005) pages: [70-89].
Welsh M, Akin D. The Effects of Extravehicular Activity Gloves on Human Hand Performance,
Society of Automotive Engineers, 2001-01-2164, (2001).
Williams DR, Johnson BJ. EMU shoulder injury tiger team report. Houston, Texas, USA
Technical Memorandum TM-2003-212058, (2003).
158
SPACE POLICY REFFERENCES
AIAA (American Institute of Aeronautics and Astronautics), 1992, OrbitalDebris Mitigation
Techniques: Technical, Economic, andLegalAspects. SP-016-1992, Washington, D.C.:
AIAA.
Balogh, W., Hedman, N., Review of the work of COPUOS in 2009, Space Policy, Volume 25,
Issue 2, May 2009, pp. 128-132.
Chan, K., 2001, Analytical expressionsfor computing spacecraftcollision probabilities,
Proceedings of the 11th Annual AAS/AIAA Space Flight Mechanics Meeting, Santa
Barbara, CA; USA; 11-15 Feb. 2001. pp. 305-320.
European Space Agency, Space Debris: A Report from the European Space Agency Space
15
Debris Working Group, ESA SP- 1109, European Space Agency, November 1988, p. .
Futron Corp. 2006, Suborbital Space Tourism Demand Revisited, Bethesda, MD, Futron
Corporation.
Grossman, E., Gouzman, I., Verker, R., 2010, Debris/MicrometeoroidImpacts and Synergistic
Effects on Spacecraft Materials,Materials Research Society Bulletin, Vol 35, p. 41-47.
Kelso, T.S., Analysis of the 2007 Chinese ASAT Test and the Impact of its Debris on the Space
Environment,presented at the 8th Advanced Maui Optical and Space Surveillance
Technologies Conference, Maui, HI, 2007 September 14.
Kenyon, S.J., Bromley, B.C., 2005, Prospectsfor Detection of CatastrophicCollisions in Debris
Disks, The Astronomical Journal 130 269-279.
Kessler, D.J., Reynolds, R.C., Anz-Meador, P.D., 1989, OrbitalDebris Environmentfor
SpacecraftDesigned to Operate in Low Earth Orbit,NASA Technical Memorandum 100
471, Lyndon B. Johnson Space Center Houston, TX 77058
Knowles, S.H., Picone, J.M., Thonnard, S.E., Nicolas, A.C., 2001, The Effect ofAtmospheric Drag
on Satellite Orbits during the Bastille Day Event, Solar Physics 204: 387-397.
Leonard, D., 2009, Space Debris:A Growing Challenge, American Institute of Aeronautics and
Astronautics, Aerospace America, October, p. 30-36.
Loftus, J.P., 1993, The NASA Debris Handbook. Presented at the National Research Council
Committee on Space Debris Workshop, Irvine, California, November 18.
159
Space Policy References
Masson-Zwaan, T., Space Law and the Satellite Collision of 10 February2009, Space Research
Today Volume 174, April 2009, p. 4-11.
McDonnell Douglas Corporation, 1990, ASA T Technology - Lethality, McDonnell Douglas
Corp, Space Systems Company, Electronic Systems Company, Presented to Electronic
Systems Division Director of Intelligence, Hanscom Air Force Base, 26 July 1990
McNutt, R.T., 1992, OrbitingSpace Debris:Dangers,Measurement and Mitigation.M.S.
Thesis, MIT.
Mindell, D.A., Uebelhart, S.A., Siddiqi, A.A., Gerovitch, S., 2009, The FutureofHuman
Spaceflight: Objectives and Policy Implications in a Global Context, American Acadamy
of Arts and Sciences.
NASA NPR, 2008, NASA ProceduralRequirementsfor Limiting OrbitalDebrisResponsible
Office: Office ofSafety and Mission Assurance, NASA Online Directives Information
System, Released February 19,2008, <http://nodis3.gsfc.nasa.gov> (visited June 30,
2010).
National Research Council (U.S.), Committee on Space Debris, 1995, OrbitalDebris:A
Technical Assessment, National Academy Press, Washington, D.C.
Newman, D., 2002, InteractiveAerospace Engineering andDesign, McGraw Hill, p. 187.
O'Neill, I., CelebratingJuly 13, "Skylab-EsperanceDay ", Published July 14, 2009,
<http://news.discovery.com/space/celebrating-july- 13-skylab-esperance-day.html>
(visited 24 July, 2010).
Olivier, S.S., A Simulation and Modeling FrameworkforSpace SituationalAwareness.
Proceedings of the Advanced Maui Optical and Space Surveillance Technologies
Conference, Wailea, Maui, Hawaii, 2008.
Oswald, M., Stabroth, S., Wiedemann, C., Wegener, P., Martin, C., 2006, Upgradeof the
MASTER Model, Final Report of ESA Contract No. 18014/03/D/HK(SC), Braunschweig,
Germany.
Schwartz, E.I., 2010, Waste Management, Wired Magazine, Advanced Publications Inc. San
Francisco, USA, June 2010 issue, p. 173-180.
Senechal, T., 2007, OrbitalDebris: Drafting,Negotiating,Implementing of a Convention. PhD.
Thesis, MIT, pp. 48-55.
Su, S.-Y., 1993, On Runaway Conditions of OrbitalDebris Environment Management, Journal
of Spacecraft and Rockets 29(4):508-513.
160
Space Policy References
Taylor, M.W., OrbitalDebris: Technical and Legal Issues and Solutions, Institute of Air and
Space Law Faculty of Law, McGill University, Montreal, p. 22.
U.S. Office of Technology Assessment, 1990, OrbitingDebris:A Space Environmental
Problem. Background Paper OTA-BP-ISC-72, September, Washington, D.C.: U.S.
Government Printing Office.
U.S. Office of the Press Secretary, 2010, National Space Policy of the United States ofAmerica,
Released June 28, 2010, <http://www.whitehouse.gov/the-press-office/fact-sheetnational-space-policy> (visited June 30, 2010).
U.S. Space Command, 1994, U.S. Space Command Satellite Catalog.Cheyenne Mountain Air
Force Base, Colorado: U.S. Space Command.
U.S. Strategic Command, 2008, USSTRATCOM Space Control and Space Surveillance,Released
February 19,2008, <http://www.stratcom.mil/files/STRATCOMSpace-andControl_
Fact_ Sheet-25_Feb_08.doc> (visited July 30, 2010).
161
APPENDIX A
A.1
HAND INJURY PILOT STUDY
EXPERIMENTAL PROTOCOL
JSC Hand Injury Experimental Protocol
July 16, 2008
Roedolph Opperman
James Waldie
Jason Hochstein
Introduction
This document proposes a protocol to be followed during a pilot study that will seek to establish
the correlation between skin blood flow and contact pressure and injuries in the hands during
NBL training and EVA. Preliminary studies and other experiment considerations are summarized
before the detailed protocol is listed. Additionally, several other issues that may be pertinent to
the study of finger injury causal mechanisms are discussed. A separate paper study is being
conducted to analyze the correlation between hand anthropometrics, training frequency, and
finger injuries.
Hypothesis
Finger trauma experienced during EVA and NBL training is due to reduced skin blood flow
caused by contact pressure.
162
Appendix A
Aim 1: Determine if any difference in finger blood flow exists between injured and noninjured crewmembers due to physiology. Blood flow will be measured by a laser
Doppler flowmetry (LDF) probe while subjects press down at various set forces on a
precision scale.
Aim 2: Determine a correlation between skin blood flow and contact force. This will be
determined using the results of Aim 1.
Aim 3: Determine if the EMU glove reduces skin blood flow to the fingertips. Subjects will
clasp a pressure bulb with the naked hand and also inside a hypobaric chamber with
the EMU glove. Differences in blood flow can be attributed to EVA hardware.
Aim 4: Characterize the contact force on the finger by the EMU glove. Tekscan sensors will
be worn inside the glove in the chamber.
Preliminary study issues
The following have been considered in the derivation of the study protocol:
Trials have demonstrated that the optimal position of the LDF sensor is on the lateral side
of the finger close to the tip and below the nail bed (see Figure 46). In this configuration,
there is no interference when applying contact pressure to the fingertip or pad. Changes
in blood flow are quickly apparent following application of force to the tip or pad of the
finger. Additionally, the Tekscan 4305 vascular sensor can easily be placed along the
dorsal and palmar sides of the finger. The sensor must be placed squarely on the skin, and
lightly taped to avoid compression of the underlying tissue via the (small) bulk of the
sensor.
163
Appendix A
Figure 46: Tekscan sensor and LDF probe placement on finger
-
Based on preliminary trials and consultation with physiologists, there is reason to believe
that hyperperfusion may contribute to finger injuries as well as occlusion. Therefore,
when recording the LDF data, both occlusion during the force application and
hyperperfusion regimes after the force application will be considered.
-
As part of the preliminary study, a baseline skin blood flow measurement was recorded
from one of the researchers over 500 seconds. Data collected did not converge to constant
value and showed no recurring patterns. Subsequently, a Fast Fourier Transform (FFT)
analysis was performed to identify possible component frequencies; the only component
was the heart rate occurring at approximately 1 Hz. Results showed that noise sources
were not significant and that skin blood flow at rest varied significantly over 500
seconds. These results, however, are believed to be erroneous after repeating the
measurements a second time with the same subject as well as with two other researchers.
The large variance of the first study is attributed to poor attachment of the LDF sensor,
and the subject talking occasionally during the test. It is apparent that there is
unpredictable variance of the steady-state blood flow over time.
-
A baseline measurement will be taken immediately before each test to obtain a reference
with which relative decreases in blood flow between subjects can be measured. Quick
measurements of new blood flows will be take after pressure is applied to the finger,
thereby minimizing artifacts due to the blood flow variance over time.
164
Appendix A
-
Measurements of blood flow and contact pressure should be taken from the middle
finger. This is due to propensity of the middle finger for injury based on examination of
fingertip injury photos.
-
Correspondence with ILC Dover indicated that Phase VI gloves are custom fitted to each
astronaut according to hand circumference and middle finger length, and are not
produced in discrete sizes. For this reason it has been decided to accept subjects of any
hand size since gloves are fitted proportionally the same to each astronaut. This may
assist in finding suitable astronaut subjects, as size is not a selection criterion.
-
Specific attention must be made when applying the sensors to the finger. The shape of
adhesive tape used to apply the LDF sensor to the finger should conform as closely as
possible to the shape of the finger so as to avoid any point pressures. Additionally,
preliminary samples showed that surgical gloves used to keep the sensors in place, if too
tight, might restrict blood flow, especially when fingers are bent. For this reason, it is
recommended to use individual finger cots instead. Comfort gloves will be used in the
EVA glove condition.
-
Because the LDF probe has a penetration of only -2mm, it must be stated clearly that
measurements of blood flow are limited to the epidermis tissue.
-
Subjects will trim fingernails to approximately the same length as during NBL training
and EVA mission(s) to help simulate training and EVA blood flow.
-
All tests are to be done with the hand the same vertical distance from the heart, as
determined by the setup of the hypobaric chamber.
-
For the sake of convenience in moving equipment, a small precision digital scale should
be used, rather than a large scale.
-
The Tekscan 4305 sensor will be placed on the middle finger such that the minimum
number of sensels covers the finger tip. When sensels are bent in tight radii, inaccurate
data is given.
-
Subjects and lab should be at stable temperature throughout protocol.
165
Appendix A
Planned tests
- Outside the hypobaric chamber, with LDF sensor:
1. Blood flow measurements for finger pad and tip force, 1 and 2 kg. This will determine if
there are any basic differences in finger circulation of injured and non-injured
crewmembers.
2. Middle finger and thumb bulb clasp at 100 and 200 mmHg (15 and 30 kPa).
- Inside the hypobaric chamber, evacuated of 222mmHg (30 kPa), with LDF/Tekscan sensors,
comfort and EMU glove:
3. Blood flow measurements for finger pad and tip force, 1 and 2 kg.
4. Middle finger and thumb bulb clasp at 100 and 200 mmHg (15 and 30 kPa).
Equipment
Figure 47 shows the hardware and sensor used in this study. From left to right:
Figure 47: Layout of measurement and data analysis equipment
166
Appendix A
1.
White, high resolution scale (on floor)
2.
Bulb and gauge assembly of the sphygmomanometer
3.
Surgical gloves used to keep sensors from moving on the hand
4.
Display box for scale
5.
Fiber optic cable with Laser Doppler probe
6.
Laser detector box (white)
7.
Laser generation box (black)
8.
Series 4305 vascular sensor attached to Tekscan handle (in foreground)
9.
Laptop for recording blood flow data
10.
Laptop for recording Tekscan contact pressure data (right)
Additionally, (but not shown) we will be using a small battery-operated digital scale reading to 2
kg to be used inside the hypobaric chamber.
Subjects
2 researchers with large size Phase VI gloves. Male.
Preliminary Test Protocol
Pretest Checklist
1. Inform subjects of experiment protocol, hazards (including laser hazards), emergency
protocol and experiment termination criteria, and have consent form signed. Instruct
subjects to avoid looking directly at the laser.
167
Appendix A
2. Stress that laser should NEVER be on while the LDF sensor is detached from the
subject's hand and the covering comfort glove is removed. Laser key shall be turned to
off and removed before the sensor is exposed.
3. Should the subject feel any discomfort or hot spots while in the gloves, or wish to
discontinue the experiment for any other reason, the experiment will be terminated upon
request. Additionally, should data collection equipment fail, or in the event of an
emergency, the experiment will also be stopped immediately.
4. Close off laser area with a sign indicating that the laser is in use.
Data Collection
5. Ensure that laser is switched off before applying sensor to the subject's hand
6. Attach LDF sensor to lateral side of middle finger close to the fingertip and below the
nail bed on the dominant hand. Sensor should be positioned on flattest part of finger area
to ensure full contact between sensor and finger surface. Adhesive tape should be cut to
conform as closely to the contours of the skin as possible while ensuring that the sensor is
properly held in place.
7. Cover hand with comfort glove to hold sensor in place and to protect subjects from laser
exposure.
8. Start the laser
a. Confirm that laser is not directed at humans or reflective surfaces before starting
laser (sensor should be attached to finger and covered with comfort glove)
b. Activate power supply to laser generator box
c. Wait approximately 30 seconds before inserting laser key
d. Turn laser key to "on" position
e. Laser is now operational and ready for use
168
Appendix A
9. Allow subject to rest for -3 minutes without the hand resting on any surface. Subject is
to minimize talking and moving during the test.
10. Begin new data acquisition.
11. Have subject place fingertip on scale to 1kg. After data settles (-5 seconds), instruct
subject to relax again (but not rest hand on any surface).
12. After second settlement, repeat step 8 subsequently for 1kg on the fingerpad, and 2kg on
the fingertip and finger pad.
13. Repeat step 8 but have the subject squeeze the bulb of a sphygmomanometer between the
middle finger and thumb to 100 and 200 mmHg.
14. Save data.
15. Shut down the laser.
a. Turn laser key to "off' position and remove key from laser.
b. Disconnect power supply to laser and verbally confirm that it is now safe to
detach sensor from hand.
c. Stow laser system in a secure location.
16. Remove hand from comfort glove.
17. Attach Tekscan 4305 vascular sensor to the middle finger using medical adhesive. It
should be wrapped over the dorsal and palmar sides of the finger with the tip of the
sensor attached to the palm. The tip of the finger should match the distal gap in the
sensor array to avoid artifacts, and also to help connect the sensor to the handle as afar
away from the hand as possible.
18. Place a finger cot and comfort glove on the subject's hand.
19. Attach the EMU glove of the subject to the glovebox arm, and place the subject's hand
into the EMU glove box assembly.
169
Appendix A
20. Completely open the bulb relief valve before pressure chamber is evacuated to avoid any
pressure effects to the bulb or gauge.
21. Depressurize glovebox to 4.3 psid.
22. Tighten bulb relief valve.
23. Repeat step 5 to safely start the laser.
24. Begin new data acquisition.
25. Perform steps 8-10.
26. Save data.
27. Reopen the bulb relief valve before re-pressurizing chamber.
28. Pressurize chamber to ambient pressure.
29. Repeat step 12 to safely turn off laser.
30. Remove hand from EMU glove and comfort glove.
31. Remove sensors.
Emergency Procedure
1. Immediately turn laser key to "off' position and remove key from laser.
2. Followed by disconnecting the power supply
Experiment Termination Criteria
170
-
If subjects experience any discomfort or hotspots while wearing gloves and sensors.
-
If hardware malfunction occurs
-
If emergency situation occurs (e.g., fire alarm)
-
If any other off-nominal circumstance occurs
-
If subject requests experiment termination
Appendix A
Dates
Pilot test with glovebox is planned for Friday, August 1, contingent on glovebox paperwork.
Actual testing TBD, contingent on CPHS/IRB approval, subject/glovebox/investigator
availability and badging.
Further studies
-
Compare gloves (EMU vs. Orlan).
-
The question of technique as a contributor to the change in blood flow also arose.
Astronauts who, for example, grip a tool more tightly than necessary, may experience
higher blood flow occlusion and consequently more finger injuries.
Instead of
prescribing a pressure and force, a new protocol would prescribe a task. The magnitude
of the force exerted b the astronauts to achieve the same task can be compared, and
perhaps a correlation of skin blood flow with EVA technique derived.
171
APPENDIX B
B.1 HAND INJURY PILOT STUDY TEST MATRIX
Number of trials
Number of subjects
Procedure between trials
Setup
12 trials per subject (6
outside glovebox, 6 inside
glovebox)
2
Subject rest for 20 sec between each trial to
allow blood flow to return to baseline value.
(Relaxed hand placed on surface next to
±15 min
per
subject
Time
scale/bulb)
Subject Trial Glovebox Donned
Order Utilized
EMU
Allowable
Error*
Test trail Description
Trail
Time
Glove
#1
#2
*
1
2
3
4
5
6
No
No
No
No
No
No
No
No
No
No
No
No
7
Yes
Yes
8
Yes
Yes
9
10
11
12
Yes
Yes
Yes
Yes
1
2
3
4
5
6
7
8
9
10
11
12
No
No
No
No
No
No
Yes
Yes
Yes
Yes
Yes
Yes
Finger pad on scale to 1 kg for 10 sec x 5
150 sec
Finger pad on scale to 2 kg for 10 sec x 5
150 sec
Finger tip on scale to 1 kg for 10 sec x 5
150 sec
Finger tip on scale to 2 kg for 10 sec x 5
150 sec
Press down on bulb to 100 mmHg for 10 sec x 5 150 sec
Press down on bulb to 200 mmHg for 10 sec x 5 150 sec
Finger pad on scale to 1 kg for 10 sec x 5
150 sec
Yes
Yes
Yes
Yes
± 100g
± 15Og
± 100g
± 150g
± 5mmHg
10mmHg
± 100g
± 150g
± 100g
± 150g
5mmHg
± 10mmHg
No
No
No
No
No
No
Yes
Yes
Yes
Yes
Yes
Yes
± 100g
± 150g
± 100g
± 150g
5mmHg
10mmHg
± 100g
± 150g
± 100g
± 150g
± 5mmHg
±10mmHg
Finger pad on scale to 2 kg for 10 sec x 5
150 sec
Finger tip on scale to 1 kg for 10 sec x 5
Finger tip on scale to 2 kg for 10 sec x 5
Press down on bulb to 100 mmHg for 10 sec x 5
Press down on bulb to 200 mmHg for 10 sec x 5
150 sec
150 sec
150 sec
150 sec
Finger pad on scale to 1 kg for 10 sec x 5
Finger pad on scale to 2 kg for 10 sec x 5
Finger tip on scale to 1 kg for 10 sec x 5
Finger tip on scale to 2 kg for 10 sec x 5
Press down on bulb to 100 mmHg for 10 sec x 5
Press down on bulb to 200 mmHg for 10 sec x 5
Finger pad on scale to 1 kg for 10 sec x 5
Finger pad on scale to 2 kg for 10 sec x 5
Finger tip on scale to 1 kg for 10 sec x 5
Finger tip on scale to 2 kg for 10 sec x 5
Press down on bulb to 100 mmHg for 10 sec x 5
Press down on bulb to 200 mmHg for 10 sec x 5
150 sec
150 sec
150 sec
150 sec
150 sec
150 sec
150 sec
150 sec
150 sec
150 sec
150 sec
150 sec
Acceptable error in keeping scale/bulb reading constant
172
Total recording time:
60 min
Total duration of test:
±90 min
Appendix B
173
APPENDIX C
C.1
HAND INJURY PILOT STUDY DATA
This data has been recorded for one subject. Figure 48 a & b shows the skin contact pressure and
skin blood flow data for the finger pad configuration.
Average Finger Pad Pressure
9
150
10
Time (sec)
Finger Pad Blood Flow
120
S00
60
'L.
40
ii
20
a...,
m
Time (sec)
Figure 48: a) Contact pressure and b) blood flow for finger pad configuration
174
Appendix C
Figure 49 shows the skin contact pressure and skin blood flow data for the finger tip
configuration.
Average Finger Pad Pressure
300 -
S
E
E 250
S200
150
100
Time (sec)
Figure 49: a) Contact pressure and b) blood flow for finger tip configuration
Average Finger Pad Pressure
2507
00
150
100
S50
Time (sec)
Finger Pad
Blood Flow for Bulb Trails
10
100
S70
50
40
00
0aA30
20
10
Time (sec)
Figure 50: a) Pressure and b) Blood flow data for Sphygmomanometer test
175
Appendix C
Figure 50 and Figure 51 show the data obtained for the Sphygmomanometer tests.
Skin Pressure for different sections of the hand
250.00
-
200.00
150.00
Do
mAv
E
0
C
0
.
100.00
0
50.00
Iq
o
0~C')
7
CM
'7
CP ILO
M'
0
CO
1P
q
10
0N0
) U
0)
0
--
0
(D
LO
C-' 0 V
MCo
Co
0
0
C
-
N
Co
0
-
0
-
0)
P-
C'Co
Mo M
Cr)
q
0
0
00
C)
C-.
V
LC) V
O
W)
04
Time (sec)
Figure 51: Pressure Distribution over different regions of the hand
Figure 52 clearly shows how pulsation diminishes as loading is increased.
Gradual Drop In Blood Flow - Showing Transistion point in Pulsation Flow
C)
(N(N
(N
N
(N CO '
(NJ
(N (N
(N
(N (N
Co
(N
C4
(N
(0
CA
CA
r-
M0C 3
(N
0 M
C4 (N (N
n)
N
CI) (N
n)
(N
0)
N
0
0
(N
C
n)
(N
(0D rM)
n'
(N (N
CO 0 C D
M)
nC
)
-T
CN (N C4
:C
CN
4N(N )
:T T
(N C4
T
IT
(N
U-)
1:T
(N
Co
(4
rIT
(N
03
(N
C)
Co o
(N
(N
(N
) C4)
Co) Co Co
CA (N (N
Co C--COC0
UC) Co )
(n
CN 0
(N (N
0
) o
C
C)
C
(N
Time (sec)
Figure 52: Occlusion sets in at about 240 seconds in the finger pad configuration
Figure 53shows the pressure and blood flow data for an astronaut subject while performing typical
EVA tasks inside the glovebox. Notice how pulsation diminishes and skin contact pressure
shoots up when gripping and manipulating an EVA tool (90-135 seconds on blood flow graph).
176
Appendix C
Also observed is the subsequent hyperperfusion of blood into the finger tip (13 5-140 seconds).
This hyperperfusion effect is believed to be the main contributor to fingernail delamination.
Average Finger Pad Pressure
250
E
200
150-
1000-
Time (sec)
Finger Pad Blood Flow
120
100
80
-0
60
40
a20
1
0
Time (sec)
Figure 53: a) Pressure and b) blood flow data for astronaut subject while performing typical EVA tasks
inside the glovebox
177
Appendix C
178
APPENDIX D
D.1 HAND INJURY STUDY CPHS APPROVAL
National Acronautics and
Sjce Admtnistraxion
Lyndon R. Johnon Space Center
2101 NASA Parkway
Houston. Texas 77058-36%
JUL24
uy 24, 2008
Jeffrey A Jones, M.DJSD2
Spce Medicine Division
Lyndon B. Johnson Spac Center
Houston, TX 77058
RE:
Expedited Approval to Allow for Enginering Evaluation of New Pressue and Blod Flow Sen=V
Hardware in AssocIation with NSBR Protacol "Mechanismu ofksjry and CatereS
fa.
Extravehicular Acuivites (EVA) Asociated Upper Extremity Medical asses"
Current Potocol Approval valid from July 24,2008 to My 24,2009
Dear Dr, Jones:
1 The Johnson Space CeanQe(SC) Comminttee for the Protection of Humn Sulcts (CPS)has
taken the following action with reaped to the above naned proposal:
) Accept the governance of the loal Institutional Review Board (IRs).
(X) Proposed engineeing evaluation of new pressure and blood flow seing hadware is approved.
( ) Proposal is approved with minor Board recommendations (See CPHS minute).
actions(See CPHS nmnutes),
(
Prosal is tabled with Board
()Proposa is rejected (See CPHS minutes).
(X) Medical Monitoring designation;( )Not Required;( ) LevelI;( ) Level It
(X) Lcvel;Il( ) Level IV
2. Additional review of this prposal will be required:
(X) Annually.
(X) If there is any substantive change in protocot
(X) Should unexpected problerms or unusual conplications develop.
3 Method of review utilized:
)JSC CPHS Screening Process (NASA Funded Grants)
S) JSC CPHS full Board Review.
() JSC CPUS Expedited Review.
Jerry UHitomic*h.D.
Chair
( SC Coomiue for the Protection of Human Subjects
Date
179
Appendix D
180
APPENDIX E
E.1 TEKSCAN VASCULAR SENSOR DATA SHEET
4300, 4305,4308
VASCULAR
MAP AND SENSOR MODEL NUMBER:
SENSOR NAME:
a veOra1Widh (W)
CoLumn
wdth (cwI
Molt Q*)
0AA
IL
txplodod View
Overn L"nI
I
(0
ILI
.........
Tab Lergtr, (A)
Sening 11.glon Dmensions
General Dilmensions
COmrall Oeral
Tab Matrix Matix
Columns
Type Length Width Length Width Height
L
W
A
Aft
&*1
CW
CS
Oty. FW
us
(0)
(in)
)
((
(W9
(0)
(in)
(O)
0.8
9.0
18.9 0.100
1 0.160
4300 28.4
24.5
0.8
8.9
18.1 0.100
1 0.160
4305
4308
16.6
0.8
9.7
6.4 0.100
1 0.160
Metric (net
(M"mi(ni-)
{ru
(nu
(rm
(anl
(fr~r
721
21
228
4300
480
2.54
1 4.06
623
20
225
4305
409
2.54
1 4.06
422
21
246
4308
163
2.54
1 4.06
Summary
Rows
4S
No. of
Sensels
Senset
Density
(sensel per in)
09)
0.250
0.250
0.250
7
55
26
87
6.35
6.35
8.35
67
55
28
67
55
26
4
4
4
55
26
(sensel per
0.6
0.6
0.6
Application Examples: Garment pressures. Three sizes for finger, arm and leg.
Special Features: Low pressure.
-
Internal vents.
Tekscm Inc., 307 Wen FirstStreet, South Botn MA
02127
Phone:617-464-4500 Fax 617-464-4266 Website www.temksc
com
181
Appendix E
182
"The heavens declare the glory of God; and the firmament sheweth His handywork."
- Psalms 19:1