Modeling of Asymmetry between Gasoline and Crude oil
advertisement

Modeling of Asymmetry between Gasoline and Crude oil
prices: A Monte Carlo Comparison
Afshin Honarvar
University of Calgary
An Engle-Granger two-step procedure is commonly used to estimate
cointegrating vectors and consequently error-correction models. This paper uses Monte
Carlo methods to demonstrate that the Engle-Granger two step method leads to biased
estimates of asymmetric parameters and in some cases suggests symmetry in the
estimated parameters. In contrast, the single equation error correction model (SEECM)
and nonlinear least square (NLS) methods for simultaneous estimation of the
cointegrating vector and the ECM, perform better in estimating the asymmetric
parameters and making inferences on existence of asymmetry when the error terms in
DGP are white noise. When the error terms in DGP are auto-correlated, NLS estimations
are less biased and inferences are less likely to be misleading compared with SEECM
and the Engle-Granger two-step procedures.
1. Introduction:
Some observers perceive that retail gasoline prices are more responsive to
increases in crude oil prices than they are to decreases. The perceived asymmetric
relationship between gasoline and crude oil prices has been interpreted by some authors
as the evidence that the petroleum industry is monopolistic and takes advantage of its
market power. Thus consumers and politicians in countries like U.S., Canada and the
Netherlands have called for policies to put a stop to what is seen as unfair pricing
practices for petroleum products.1 There is no consensus as to the existence of asymmetry
between gasoline and crude oil prices. Bacon (1991) finds evidence of asymmetry for the
U.K. gasoline market; Karrenbock (1991); Borenstein, Cameron, and Gilbert (1997);
Balke, Brown, and Yücel (1998); Brown, and Yücel (2000); Borenstein and Shepard
(2002) and Radchenko (2005) all find evidence of asymmetric responses in U.S. gasoline
markets to changes in crude oil prices. Galeotti, Lanza and Manera (2003) find some
1
evidence of asymmetry between crude oil and spot gasoline prices in international
markets.2
In contrast with the other studies, Godby, Stengos, Lintner and Wandschnider
(2000) find no evidence of asymmetry in the Canadian retail gasoline market. Shin
(1994), Bachmiere and Griffin (2003) find a symmetric response in U.S. gasoline market.
Bettendorf, Van der Geest and Varkevisser (2003) find mixed evidence of symmetry and
asymmetry for Dutch retail gasoline market.
Confounding our ability to determine from the literature whether the asymmetric
relationship between gasoline and oil prices exists is the fact that studies listed above use
data sets for different time spans, different locations and different market stages. The
studies also employ a range of estimation strategies for accounting for the existence of
cointegration and asymmetry.
It is difficult to assess whether the variation in findings
across studies is due to the data set used or statistical procedure employed.
We also lack a basic understanding of which estimation strategies can be expected
to yield the “best” results. In fact the focus of debate in this literature (gasoline – crude
oil price asymmetry) is concentrated on seeking for the most reliable and powerful tests
of determining asymmetry. For instance Bachmiere and Griffin (2003) use two different
models to test for asymmetry in one data set and faced contradictory results. Godby et al.
(2000) believe that using a threshold of zero for splitting the direction of movements in
prices (which is frequently used by researchers) imposes too much restriction on the
model; therefore they suggest threshold autoregressive (TAR) models.
Meanwhile
Granger and Yoon (2002) suggest that asymmetry might exist in cointegrating vectors as
2
well as in adjustments, so they propose a CECM (crouching error correction model)
based on a hidden cointegrated vector.3
In the current econometric literature there are many nonlinear approaches to the
estimation of asymmetry, and in Hamilton’s (1993) words “an unbounded universe of
alternative different specifications”. Asymmetric ECM and threshold regime switching
models (TAR,MTAR,…) are two general types of models that have been frequently
employed in the literature of gasoline and crude oil price asymmetry. According to Fan
and Yao (2003), “the usefulness of TAR models is due to the fact that the class of
piecewise linear functions, may typically provide a simple and easy-to-handle
approximation to a more sophisticated nonlinear function”. Furthermore, most of the
authors in the literature of gasoline and crude oil asymmetry believe that, there is a longrun equilibrium between prices of these two commodities and any deviation from it will
result into the adjustment to the equilibrium sooner or later.4
In line with this literature, I follow the common belief of existence of a long-run
equilibrium between prices of gasoline and crude oil and investigate the properties of the
asymmetric ECM and TAR models. Asymmetric ECM and TAR models have not been
compared in a single study under the same conditions. The purpose of this research at the
first step is to compare these two simple asymmetric models by using Monte Carlo
experiments to determine which one uncovers asymmetry better. It is well known that
tests of asymmetry suffer from low power of the test, but there are comparative
advantages for some of these techniques.
This paper is structured as follows. In the next section, I will describe the
implications of this study on past applied studies. A brief overview of asymmetric ECMs
3
is presented in section 3. In section 4, I review the small sample bias in Engle-Granger
two-step procedure which is frequently used in asymmetric ECMs for estimations. Two
currently used methods of simultaneous estimations of cointegrating vector and ECM are
extended to an asymmetric environment in section 5. Section 6 presents Monte Carlo
experiments and simulation results for different assumptions about the error terms and
some cases of interest. Concluding remarks close the paper.
2. Implications for the empirical research:
Most of the empirical studies address asymmetry between gasoline and crude oil
prices by questioning whether gasoline prices symmetrically respond to an increase or
decrease in crude oil prices. Among these studies most of the researchers concentrate on
estimates of different short-run adjustments and speeds of adjustments to positive and
negative shocks in crude oil prices. Due to fact that most of the economic data series are
integrated with order one, this type of research is embedded in the literature of
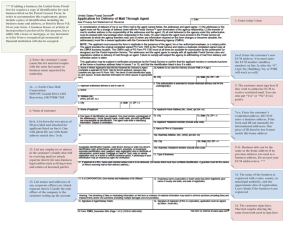
cointegration and ECM.5 The major findings and methodologies of the most cited studies
are summarized in table (1). As a result, table (1) shows that the majority of the
estimations are based on Engle-Granger two-step procedure to uncover the asymmetry.
However, Borenstein et al. (1997) and (2002) are exceptions such that their specifications
are non-standard with respect to general form of asymmetric ECM and they are incapable
of tracking asymmetries in speeds of adjustment. In both of these papers short-run
adjustments are modeled asymmetrically but speeds of adjustment are modeled
symmetrically. Therefore in my study I avoid unnecessary complexities and specifically
designed models and concentrate on general and commonly used forms of asymmetric
models to show the inappropriateness of Engle-Granger two-step. Meanwhile using
4
Engle-Granger is very common not only in this literature but also in recent time series
literature for instance MTAR modeling introduced by Enders and Siklos (2001).
Table 1- A summery on some of the previous empirical papers
Author(s)
Data /
methodology
Estimation Major findings related to asymmetry
Country
1-Bacon (1991)
Fortnightly
Quadratic partial
Asymmetry between retail price of gasoline and its cost
NLS6
1982-1989
adjustment
of production.
U.K.
model
2- Galeotti,
Monthly
Asymmetric
Evidence for asymmetry between prices of “retail
Lanza, Manera
1985-2000
ECM based on
gasoline and spot gasoline” and also “spot gasoline and
OLS
(2003)
Germany,
EG two-step and
crude oil” for 5 European countries.
France, UK, bootstrapped
Italy, Spain
F-tests
3- Godby,
Weekly
Error correction
No Asymmetry between retail gasoline prices (regular or
Stengos, Lintner, 1990-1996
TAR model
premium) and crude oil prices.
Wandschnider
Canada
based on EngleOLS
Granger two-step
(2000)
method
Evidence of asymmetry depends on the choice of the
4-Bettendorf,
Weekly
Asymmetric
day in the week, as a representative price of the week.
Van der Geest
1996-2001
ECM based on
OLS
Choice of Monday, Thursday & Friday reveals asymmetry
and Varkevisser
Netherlands EG two-step
between retail and spot gasoline prices in Dutch market.
(2002)
5- Karrenbock
Monthly
Distributed lag
Asymmetry between retail and wholesale gasoline prices.
(1991)
1983-1990
model
OLS
USA
6- Shin (1994)
Monthly
Quadratic partial
No asymmetry between wholesale gasoline and crude oil
NLS
1986-1992
adjustment
price.
USA
model
Asymmetry between prices of :
7- Borenstein,
Weekly &
Non-standard
spot gasoline & spot crude oil (inventory adjustment)
Cameron, Gilbert Semi
Asymmetric
retail gasoline & wholesale gasoline (indication of market
(1997)
monthly
ECM
power).
1986- 1992
2SLS
No strong evidence of asymmetry in other relationships.
USA
They treat price of crude oil as endogenous and use crude
oil price in international markets and futures market as
instruments.
Asymmetry between retail gasoline price and crude oil
8- Balke, Brown, Weekly
VAR in levels
price, when using first difference data.
and Yücel (1998) 1987-1996
and Asymmetric
OLS
No asymmetry when using data in levels.
USA
ECM based on
EG two-step
Asymmetry between crude oil price and gasoline terminal
9- Borenstein,
Weekly
Non-standard
prices. They treat price of crude oil as endogenous and use
Shepard (2002)
1986-1992
asymmetric
2SLS
crude oil price in international markets and futures market
USA
ECM & VAR
as instruments.
model
10-Bachmiere,
Daily
Asymmetric
No evidence of asymmetry in the response of regional
Griffin (2002)
1985-1998
ECM based on
OLS
spot gasoline prices to crude oil price shocks.
USA
EG two-step
11- Radchenko
Weekly
Asymmetric
Asymmetry between crude oil price and retail regular
OLS
(2005)
1991-2003
ECM based on
gasoline price is attributed to oligopolistic theory.
USA
EG two-step7
5
In table 1 we find mixed results of symmetry and asymmetry, such that existence
of asymmetry and its magnitude remains as a question. This is partly due to inability of
asymmetric ECM to find asymmetry. In Galeotti et al. (2003) word “A few applied
studies employing the asymmetric ECM model have recently documented that the
commonly used F-tests of equality among coefficients accounting for the asymmetries are
biased toward accepting null of symmetry in small samples”. Consequently, Galeotti et
al. bootstrapped F-tests to overcome this problem. As we will see later, this problem
might be due to modeling approach and estimation method; not in F-test tabulations.
Therefore there are grounds to be suspicious of the obtained results in tables 1 and 2.
Hence new applied investigations based on different specifications and estimation
methods are required. In summary; even if asymmetry is found we have to be suspicious
about the magnitude of the asymmetry (bias in estimations).
In table 2, the reported asymmetric short-run and speed of adjustment parameters
are presented. Only the studies that potentially can report such parameters are included.
Note that these parameters are incomparable because of the different approaches;
different time data sets, different market stages and so on.
Finally; the diversity of the obtained results and presence of a wide range of
estimated parameters persuade us to perform a new empirical study in this literature in
the next chapter.
6
Table 2- Summary of the parameter estimates in the related papers
Asymmetric Short-run parameters
Lagged dependent variable
Study
Borenstein, Cameron,
Gilbert (1997)(spot-crude)
(retail – crude)
Bachmiere and Griffin
(2002)(spot-crude)
Borenstein and Shepard
(2002)
Godby et al. (2000)
Galeotti, Lanza, Manera
(2003)(spot crude)
(retail-crude)
Bettendorf and Van der
Geest and Varkevisser
(2002) (retail-spot)
Radchenko (2005)
Asymmetric Speed of
adjustment parameters
Contemporaneous Independent
variable
Positive
Negative
movements
movements
Positive
movements
Negative
movements
-0.055
-0.314
-0.070
0.127
0.888
0.549
1.088
-0.181
0.139
0.154
0.748
0.799
Positive
movements
Negative
movements
-0.183
-0.175
-0.017
-0.025
They did not report these coefficients because their paper designed to answer lags in adjustment.
Therefore they just test asymmetry but did not report the results in the way to be useful for us.
They just report P-Values of the test and nothing more.
NA
NA
NA
NA
[0.76 0.88]
[0.20 0.79]
[0.58 1.16]
[0.16 0.55]
NA
NA
[0.27 0.717]
[0.41 0.50]
[-0.85 -0.35]
[-1.37 -0.15]
[-0.58 -0.27]
[-1.36 -0.12]
[-0.918 -0.836]
Although he use asymmetric ECM but he does not report the coefficients because he introduces
some measures based on unreported coefficients and reports the measures instead.
3. An overview of test procedures:
The asymmetric ECM and asymmetric ECM with TAR are extensions of the
symmetric ECM that model asymmetry as the existence of two or more different linear
regimes. Thus, the simplest way to motivate the strategy for estimating asymmetric
ECMs and to demonstrate the potential advantages and disadvantages with two-step
versus single step estimation methods is to begin with a presentation of the symmetric
ECM.
Equation (1) shows a cointegration between two I(1) series of Y and X. Engle and
Granger (1987) propose a two step procedure for estimating the ECM in (4). In the first
step, equation (1) is estimated by OLS to yield the estimates α̂ and β̂ . These estimates
are used to calculate Zt, the sequence of residuals (estimates of ut), as shown in (2). A
7
unit root test is performed to assess if Zt is stationary as per equation (3) where the null
hypothesis for the test is one of no cointegration (HN: ρ=0). So long as the Zt are
stationary, according to Granger’s Representation Theorem (Engle and Granger (1987)),
we can estimate the ECM as per equation (4) by OLS in the second step. 8 Note that
when cointegration exists, Zt can be used as error correcting term in equation (4). Thus Zt
is stationary in the presence of cointegration and ε1t is a white noise disturbance term.
(1)
(2) OLS estimations
(3) Unit root test:
(4)
⇒
Yt = α + β Xt + u t
Zt = Y t − αˆ − βˆ X t
∆Zt=ρZt-1+εt
k
n
i =1
i =1
∆Yt = θ0 + θ1 Zt −1 + ∑ β ix ∆X t −i + ∑ β iy ∆Yt −i + ε1t
Equation 4 specifies that any changes in Yt can originate from one of three sources; first
from Zt-1 (i.e. deviations from equilibrium in last period); second, from ∆Yt-i and third,
from ∆Xt-i (i.e. changes in lagged dependent and independent variables). θ1 is interpreted
as the coefficient of speed of adjustment to the long-run equilibrium; however βxs and βys
are called short-run adjustment coefficients with respect to short-term dynamics of Yt and
∆Xt.
Moving beyond the symmetric ECM environment to an asymmetric ECM
increases the complexity of the estimation problem, but these models are commonly
based on existence of a linear cointegration between levels of two I(1) series as in
equation (1).9 Zt is a stationary process, ε1t is a white noise disturbance and X and Y are
integrated I(1). As described in (5), in its general form, the asymmetric error correction
8
model specifies the response of Yt to positive and negative shocks to right hand side
variables.
(5)
k
n
k
n
i =0
i =1
i =0
i =1
∆Yt = θ1+ Z+t −1 + θ1− Z−t −1 + ∑ β ix+ ∆X t −i + ∑ β iy+ ∆Yt −i + ∑ β ix− ∆X t −i + ∑ β iy− ∆Yt −i + ε1t
Where Z +t −1 = max{0,Zt-1} and Z −t − 1 = min{0,Zt-1}.
β +x applies when ∆X t −i > 0
; β +y applies when ∆Yt −i > 0
β −x applies when ∆X t −i < 0
; β −y applies when ∆Yt −i < 0
We estimate equation (5) by OLS, and if β +x ≠ β −x and β +y ≠ β −y and θ+≠ θ-, then we can
say that asymmetry exists. This is an application of Engle-Granger two-step procedure,
because, the estimated residuals in equation (2) are used as error correcting terms in (5).
Hence the conventional testing procedure for asymmetry in the adjustment speed
coefficients is to begin with following null and alternative hypothesis.
HN: θ+= θHA: θ+≠ θThreshold autoregressive (TAR) in ECM: Godby, Lintner, Stengos and Wandschneider
(2000) have a model based on threshold adjustments to estimate the relationship between
retail gasoline prices and crude oil prices. Their TAR model can be described as follows.
First, they test for the existence of the cointegration (1) between levels of variables.
After finding the cointegration they specify an asymmetric ECM that embeds a TAR
model in it (6). Therefore this is an application of Engle-Granger two-step procedure,
because the obtained residuals from (2) are used as error correcting terms in (6).*
* Hereafter, in order not clutter notation I try to maintain the same symbols for coefficients and disturbance
terms as long as it does not mislead the reader. But this does not mean that coefficients have the same
values in all models.
9
(6)
k
∆Yt = γ 0 + γ sp Z t −1 + ∑ γ i ∆X t − i + ε1t
i =1
k
∆ Yt = δ 0 + δsp Z t −1 + ∑ δi ∆ X t − i + ε1t
i =1
∆X<τ
∆X≥τ
Zt-1 is the error correcting term Y t −1 − αˆ − βˆ X t −1 and τ is the threshold value. The TAR
model is less restrictive in the sense that the threshold is not necessarily set equal to zero.
In this model the null hypothesis of symmetry is expressed as:
H N : γ = δ
H A : γ ≠ δ
Where γ = (γ0,γSP, γ1 ,…, γ k ) and δ = (δ0,δSP, δ1 ,…, δk ). They use a test based on
bootstrapped critical values of Hansen’s (1997) Wald type heteroskedasticity-consistent
test of the above null hypothesis against TAR alternative. In this investigation, existence
of asymmetry in the unit-root test for cointegration is not investigated and TAR is applied
only for ECM.10
4. The problems of small sample bias and low power in Engle-Granger two-step:
In the last section we saw that asymmetric ECM and asymmetric regime
switching models are mainly based on Engle-Granger two-step procedure, where the
estimated residuals of the long-run equilibrium were used as the error correcting term in
ECM. Although Engle-Granger two step estimations are consistent for estimating the
symmetric ECM, Banerjee et al. (1986) present Monte Carlo simulation results showing
that the Engle-Granger procedure may lead to substantial biases in the estimation of
cointegrating vector in finite samples, when there is a symmetric regime. To show this,
they start with the following Data Generating Process (DGP) for their experiments.
10
(7)
Yt=γ0+γ1Yt-1+γ2Xt+γ3Xt-1+ε1t
(8)
Xt=Xt-1+ε2t
Equation (8) states that Xt is a random walk process and is an exogenous variable.
Equation (7) satisfies existence of ECM with an underlying cointegrating vector like
equation (1). It can be shown that existence of cointegrating vector β=1, requires γ1+γ2+γ3
=1.11 A stability condition requires that -1<γ1<1. As a result we can derive equation (9)
from equations (7) and (8) when β=1 and Xt is exogenous. Subtracting Yt-1 from both
sides of (7), adding and subtracting (γ1 -1)Xt-1 to its right hand side, and imposing the
homogeneity condition γ3 =1-(γ1+γ2) yields:
(9)
∆Yt= γ0+ (γ1 -1) (Yt-1 - Xt-1) +γ2 ∆Xt+ε1t
Adding Yt-1 to both sides of (9), and adding and subtracting Xt to the right hand side
yields (10):
(10) Yt= γ0+Xt +γ1(Yt-1 - Xt-1) + (γ2-1) ∆Xt+ε1t
Comparison between (10) and (1) shows that estimation of (1), when β=1, results in the
dynamics described by ∆Xt and (Yt-1 - Xt-1) are all captured in the residual Zt.
(11)
Zt = γ1(Yt-1 - Xt-1) + (γ2-1) ∆Xt+ε1t
In general, the Zt’s will be serially correlated, and then Banerjee et al. (1986) propose to
estimate the long-run parameters of (10) by estimating the specification (12) in a single
stage.
(12)
∆Yt=a+ b (Yt-1 - Xt-1) +c ∆Xt+ dXt-1 + υt
Then the cointegrating coefficient β is estimated by computing 1 −
d̂
b̂
. This single equation
estimation of long-run parameter and its variants is known as Single Equation ECM or
11
(SEECM).12 Finally Phillips and Loretan (1991) suggest that simultaneous estimation of
cointegrating vector and ECM should be estimated by non-linear least square (NLS)
methods since NLS estimators are asymptotically consistent, normally distributed and
efficient.13
Cook, Holly and Turner (1999) explain that it is difficult to reject the null
hypothesis of symmetry when Engle-Granger two-step procedure is employed. Using a
Monte Carlo simulation they conclude that tests of asymmetry which start from the null
of symmetry are likely to have low power, and if we incorrectly accept the null of
symmetry then we choose models which ignore important information about the short run
dynamics of the variable of interest. As a result Holly, Turner and Weeks (2003), suggest
that simultaneous estimation of long-run equilibrium and adjustments process using NLS
estimator decreases long-run equilibrium estimation bias and increase power of the test in
asymmetric ECM.
5- Simultaneous estimation of ECM and cointegrating vector in a TAR asymmetric
environment:
For the case of a linear ECM, Banerjee et al. (1986) claim using single equation ECM
gives better small sample estimations than Engle-Granger two-step procedure. Also
Phillips and Loretan (1991) use nonlinear least square estimators to correct
misspecification of Engle-Granger two-step procedure in a linear environment. To my
knowledge these models have not been developed for application in an asymmetric
adjustment movement or at least have not been applied to the study of gasoline and crude
relationships. Since the performance of these approaches in the asymmetric environment
12
has not been investigated, I suggest using of Banerjee’s SEECM and Phillips and
Loretan’s NLS in a TAR asymmetric environment.
In single equation ECM (SEECM), long-run and short-run adjustments are
estimated by running an OLS on (12), and then cointegration coefficient is computed by
expression 1 −
d̂
b̂
.
We can extend Banerjee’s SEECM for a single regime to an
asymmetric TAR model which is based on two different regimes. The asymmetric model
with TAR is presented as two SEECM for two different regimes as follows:
(13)
∆Yt = It[γ0+ γSP(Yt-1 - Xt-1) +γ2 ∆Xt+ γ3Xt-1]
+ (1- It) [δ0+ δSP(Yt-1 - Xt-1) +δ2 ∆Xt+ δ3Xt-1] +εt
Where It =1 if ∆Xt>τ and It =0 if ∆Xt≤τ. In this case γ0, γSP, γ2, γ3, δ0, δSP, δ2 and δ3 are
estimated by OLS. Then we can compute long-run equilibrium coefficients (like β in
equation (1)) for two different regimes by 1 −
ˆ
γˆ 3
and 1 − δ3 . Note that there is a small
γˆ sp
δˆ sp
difference between (6) and (13). The error correcting term in (6) is ( Y t −1 − αˆ − βˆ X t −1 ) and
in (13) is (Yt-1 - Xt-1). Finally if γSP ≠δSP and γ2≠δ2 we have asymmetry in speeds and
short-run adjustment.
A nonlinear least square estimation method is applied to general form of equation
(9) with an unknown cointegrating vector.14 Starting from DGP (7) and (8) we can derive
the following ECM for a cointegrating vectorβ.
(14)
∆Yt= γ0+(γ1 -1) (Yt-1 -β Xt-1) +γ2 ∆Xt+ε1t
13
As a result we estimate single equation of (14) by using NLS. Therefore I suggest to
estimate (15) by NLS for each regime.
(15) ∆Yt= a+b (Yt-1 - βXt-1) +c ∆Xt+ε1t
Comparison between (4) and (15) shows that these two models are basically the same.
But (4) is estimated by using Engle-Granger two-step procedure and (15) is estimated by
NLS. Here is the specification for an asymmetric two-regime model with TAR.
(16) ∆Yt = It[γ0+γSP(Yt-1 -β1Xt-1) +γ2 ∆Xt]
+ (1- It) [δ0+δSP(Yt-1 -β2Xt-1) +δ2 ∆Xt] +εt
Where It =1 if ∆Xt>τ and It =0 if ∆Xt≤τ. In this case γ0, γ1, γ2, γsp, β1, δ0, δ1, δ2, δsp and β2
are estimated. Evidently by comparing (14) and (16), γSP= γ1 -1 and δSP= δ1 -1. Therefore
γSP and δSP are speeds of adjustments and γ2 and δ2 are short-run adjustments under two
different regimes. Note that this model is equivalent to Godby et al.’s model, except that
we estimate cointegrating vector and ECM in this model in a single step. If γSP= δSP and
γ2 = δ2, relationship is symmetric.
Note that both models (13) and (16) are based on single equation estimations of
cointegrating vector and ECM but (13) is estimated by OLS and (16) is estimated by NLS
estimators. Meanwhile cointegrating vectors are estimated differently in these two
models. In (16) they are estimated directly along with other parameters, but in (13) they
are computed by using the estimated parameters.
6. Monte Carlo simulations:
6.1. When error terms are white noise:
To compare the performance of the asymmetric estimation methods I perform
Monte Carlo experiments. I compare the estimates obtained from an asymmetric error
14
correction model, a TAR model which is used by Godby et al. (2000) and two single
stage estimation variants of TAR model.
To compare the models, I expand the autoregressive-distributed lag (ARDL)
model in (7) along with the equation (8) from Banerjee et al. (1993) to generate data for
two different regimes. Thus I use the following asymmetric DGP to generate data for two
different regimes.15
if ∆Xt >0
(17)
Yt=γ0+γ1Yt-1+γ2Xt+γ3Xt-1+ε1t
(18)
Yt=δ0+δ1Yt-1+δ2Xt+δ3Xt-1+ε1t if ∆Xt ≤ 0
(19)
Xt=Xt-1+ε2t
Where γ1+γ2 +γ3 =1, δ1+δ2 +δ3 =1, -1<γ1<1 and -1<δ1<1. Meanwhile ε1t and ε2t are
generated by using normal distribution with mean zero and standard deviation of 1.
Satisfaction of the above restrictions guarantees existence of two cointegrating vectors
with β=1 and two ECM’s with different speed and short-run adjustments in two different
regimes. Different speeds of adjustment and short-run adjustments, is interpreted as
asymmetric response of Y with respect to positive and negative shocks to X.
Based on DGP in (17), (18) and (19) we have the following cointegrating vectors
for each of the above regimes (β=1).
(20)
Yt=αi+Xt+uit i =1,2
When cointegration exists uit’s are stationary terms. In appendix one it is shown
that when Y and X are cointegrated with same cointegrating vector in two sub-samples,
Y and X will be cointegrated in the whole sample. As a result this type of DGP allows me
to generate one unique data set for whole sample, which is created by two different
regimes, and guarantees existence of cointegration and ECM’s for whole sample.
15
Remember that estimating asymmetric ECM and asymmetric TAR model requires
existence of cointegration between data at the first stage.
Hence γ1≠δ1 and γ2≠δ2 mean different speed and short run adjustment in Y to
positive and negative shocks in X (i.e. there is asymmetry). However values of γ1=δ1 and
γ2=δ2 means that we have symmetry in adjustments with respect to changes in X.
Therefore when ∆Xt >0, the first regime is active and we have the following ECM.
From (17) →
(21) ∆Yt=γ0+γSP (Yt-1 - Xt-1) +γ2 ∆Xt+ε1t where γSP= γ1 -1
And when ∆Xt ≤ 0, the second regime is active and we can derive the following ECM:
From (18) →
(22) ∆Yt= δ0+δSP (Yt-1 - Xt-1) +δ2 ∆Xt+ε1t
where δSP = δ1 -1
Derivation of (21) and (22) helps the reader to understand how our DGP creates different
speeds of adjustment (i.e. γSP and δSP) and different short-run adjustments (i.e. γ2 and δ2 )
to the equilibrium.
For example when γ2 =0.4 and δ2=0.3, it means that a change in Xt (crude oil
price) will be reflected in Yt (gasoline price) more quickly in the first regime (21) than in
the second one (22). Also values of γ1 = 0.9 and δ1 =0.5 (γ1-1 = -0.1 and δ1 -1= -0.5) mean
that in the positive shocks regime, (when we have positive deviation from equilibrium, so
Yt will be falling to move toward equilibrium) the adjustment of Y to the equilibrium will
be slower than in the negative shocks regime.
I generate 1000 samples of 200 observations. The data are generated according to
the equations (17), (18) and (19) with several sets of values for γ0, γ1, γ2, γ3, δ0 δ1,δ2 and
δ3. All of the above values are chosen based on satisfaction of homogeneity and stability
conditions. After data generation, four models are estimated. First, a general asymmetric
ECM; second, Godby et al. (2000) TAR model; third, a TAR model based on SEECM of
16
Banerjee (1986) and fourth, a TAR model based on Phillips and Loretan (1991) NLS
estimation of ECM. Thus estimations of the first two models are based on Engle-Granger
two-step procedure and the last models are based on simultaneous estimation of
cointegrating vectors and ECMs.
Models:
(A):Asymmetric ECM model
After estimation of cointegrating vector (1) in Engle-Granger two-step method, we can
split changes in independent variable (∆Xt) and cointegrating vector’s residuals (Zt-1) to
positive and negative components and then estimate (23).
(23)
−
( Zt −1 )− + η
∆ Y t = γ 0 + γ 2+ (∆ X t )+ + γ 2− (∆ X t )− + γsp+ ( Zt −1 )+ + γ sp
Where Z +t −1 = max{ 0, Z t −1} ,
−
Z t − 1 = min{ 0 , Z t − 1} ,
∆ X +t =max{0,∆Xt}
and
∆ X −t = min{0, ∆Xt}.
(B): Godby et al. TAR model:
After estimating cointegrating vector (1), Zt is estimated as per equation (2). Then lagged
estimated residuals are presented in the following equation as error correcting terms. The
parameters in (24) are estimated by OLS.
(24)
∆Yt= It [γ0+γSP Zt-1 +γ2 ∆Xt] +(1- It) [δ0+δSP Zt-1 +δ2 ∆Xt]+εt
Where It =1 if ∆Xt>τ and It =0 if ∆Xt≤τ. Zt-1 is the lagged residual of cointegrating
vector.16 We estimate this model based on the thresholds to be ∆Xt-1, ∆Xt-2 and zero in
accordance to the Godby et al. (2000) paper. Although we set the correct threshold is τ=0
in DGP, other thresholds are included in our estimation to investigate how a wrong
threshold selection affects estimations.
(C): TAR model based on Banerjee et al. SEECM
17
We estimate equation (13) directly by OLS, without need of estimating cointegrating
vector (i.e. equation(1)) separately. Then we can compute cointegrating vector
parameters by using the mentioned method in section 5.
∆Yt = It[γ0+ γSP(Yt-1 - Xt-1) +γ2 ∆Xt+ γ3Xt-1]
+ (1- It) [δ0+ δSP(Yt-1 - Xt-1) +δ2 ∆Xt+ δ3Xt-1] +εt
Where It =1 if ∆Xt>τ and It =0 if ∆Xt≤τ. I estimate this model based on thresholds of
∆Xt-1, ∆Xt-2 and zero. It seems that even if we know the threshold we have to use nonstandard critical values for the inference because t statistic of cointegration test is not
asymptotically normally distributed under the null. But we know that cointegration exists
by construction, therefore we can use standard F-tests in Monte Carlo simulation to make
inference about symmetry.
(D): TAR model based on Phillips and Loretan’s NLS
We estimate (16) for thresholds of ∆Xt-1, ∆Xt-2 and zero by NLS. Cointegrating vector is
estimated simultaneously along with other parameters estimation. Thus there is no need
of estimating cointegrating vector (equation (1)) primarily.
∆Yt = It[γ0+γSP(Yt-1 -β1Xt-1) +γ2 ∆Xt]
+ (1- It) [δ0+δSP(Yt-1 -β2Xt-1) +δ2 ∆Xt] +εt
Where It =1 if ∆Xt>τ and It =0 if ∆Xt≤τ. When the threshold is known, as it is the case in
our Monte Carlo experiment, we can use standard F-tests to make inference about
symmetry; otherwise we have to make inference based on their empirical distribution.
Unconstrained NLS in the TAR environment performs badly, unless we put restrictions
which are implying that some parameters can not take some values. For example stability
condition requires that -2< γsp<0 and -2 <δsp<0, otherwise model will not have a stable
18
equilibrium. From (14) we realize that γsp and δsp are γ1 -1 and δ1 -1 correspondingly, and
we know γ1 and δ1 must lie within interval (-1,1) to have a non-exploding system.17
Furthermore, we know that Engle – Granger estimations are consistent; hence we can
extract some information from OLS regression of Y on X such as sign of relationship
between X and Y and use them as some additional information for NLS estimations.
Following (17), (18) and (19), table (3) shows simulation results based on values
of γ0=1, γ1=0.9, γ2 =0.07, γ3=0.03, δ0=1, δ1=0.6,δ2 =0.04, δ3=0.36 and τ=0. Also Table(4)
shows simulation results based on values of γ0=1, γ1=0.7, γ2 =0.27, γ3=0.03, δ0=1,
δ1=0.5,δ2 =0.14, δ3=0.36 and τ=0. In this literature intercept can be interpreted as the cost
of refining crude oil and/or refinery or outlet margins (Godby et al. 2000). Therefore
equal constant terms in data generating process means that refinery margins and refining
costs will not be affected by shocks in crude oil price. Furthermore different intercepts
across regimes is not necessarily an interesting question as none of the authors focused on
it. I test the following null hypothesis of symmetry against alternatives of asymmetry for
parameters in (17) and (18), for each model in all replications and report frequency of the
rejection of null of symmetry in 5% significance level. It is possible to find symmetry in
some of these tests and asymmetry in the others, however, a completely symmetric model
is the case that we can not reject any of null hypotheses.
H0N : γ 0 = δ0
(25) 0
H A : γ 0 ≠ δ0
H1N : γ sp = δsp
1
H A : γ sp ≠ δsp
H 2N : γ 2 = δ2
2
H A : γ 2 ≠ δ 2
All the inferences are made based on p-values of standard F-tests, because in our
experiment threshold is known and for SEECM inferences we are confident of existence
a cointegrating vector too.
19
The simulation results are reported in tables (3) and (4). The first six columns
report average estimates across replications. The second six columns report bias
percentage of average estimates (reported in first six columns) from true values of the
parameters. The final four columns report the test results of symmetry in various
parameters and residual sum of squares for each model.
The results in these two tables are almost the same. Thus I focus on explanation
of table (3), and mention its difference with table (4) whenever is necessary. Less biased
estimations and best results are highlighted in tables (3) and (4), which mean that for the
sake of obtaining less biased asymmetric parameters; choice of the true threshold is
crucial. Evidently a wrong selection of threshold may result in largely biased estimations.
In tables (3) and (4), the asymmetric ECM (i.e. model A) always gives biased
estimates for the constant term, short-run adjustment and speed of adjustment
coefficients. The percentage of bias is large and hypothesis testing rarely rejects the null
hypothesis of symmetry when the true model is asymmetric. Therefore model A is not
only biased but also misleadingly suggests symmetry. Meanwhile estimates of the
constant terms in tables (3) and (4) are substantially biased in the TAR model based on
Engle-Granger two-step procedure (i.e. model B). But this problem does not exist in
single equation models like C and D. Furthermore we know that the data is generated
based on similar intercepts in two regimes (i.e. γ0=δ0=1), but the null hypothesis of
equality of intercepts in two regimes ( H0N ) is rejected more often (99.7% of time in table
(3)) in model B. As a result estimations of intercepts are not only biased in model B, but
also they may result in wrong inferences frequently. However the null hypothesis of
equality of intercepts ( H0N ) are rarely rejected in NLS and SEECM (relatively 12.4% and
20
4.3% of time in table (3)). Therefore estimations of intercept in models C and D are not
only less biased but also they rarely end up with wrong inferences. However SEECM
(model C) gives better results than D. We can also correct intercept bias in EngleGranger two-step models very easily by using (Yt-1- β̂ Xt-1) instead of (Yt-1- α̂ -β̂ Xt-1) as
the error correcting term. However this modification only corrects the intercept term and
it does not affect estimations of the speed of adjustment and short-run coefficients.18
In both tables of (3) and (4), when the threshold value is correctly selected, longrun adjustment coefficients are estimated relatively with small bias percentages in all
models except model A. Furthermore the null hypothesis of symmetry in speeds of
adjustment ( H1N ) are rejected frequently in all models except model A. For instance
rejection frequencies are 94%, 95% and 99% for models B, C and D in table (3). Thus
NLS model with 99% rejection frequency, among the other models, offer more reliable
inferences.
Choosing the correct threshold value, short-run adjustment coefficients are
estimated relatively with small bias percentages in all models except in model A.
However, the null hypothesis of symmetry is rejected rarely by any of the models.
Rejection frequencies in table (3) are 5.2%, 5.2% and 8.6% for models B, C and D
correspondingly. This is mainly because of the close values of short-run adjustments (i.e.
0.07 and 0.04) in DGP of two regimes. However NLS (model D) offers the highest
rejection percentage for H 2N , amongst all models. In table (4), it is shown that with larger
differences in the values of short-run adjustments (i.e. 0.27 and 0.14), the rejection
frequency increases to 9.6%, 9% and 15.9% for models B, C and D correspondingly. But,
they are still small.
21
Godby et al.’s model rejects correctly the null hypothesis of symmetry in speeds
of adjustment more frequently in table (3); about 94% of time. However, the rejection
frequency of the null hypothesis of symmetric short-run adjustment is relatively low.
Moreover in 99.7% of time, the model wrongly infers non-equality of constant terms.
However in table (4), with larger differences between parameters, rejection frequency of
null hypothesis of H1N substantially declines to 47.9%. Also frequency of wrong inference
about the constant terms declines to 57.4%. As a result (from table(3) and table(4)) when
the error terms are white-noise, Monte Carlo experiment suggests that Godby et al.’s
model has no remarkable advantage to models (C) and (D), however it still estimates the
parameters with small biases. Although small average biases in this model are good but
they are just mathematical average of estimation biases and can not be used for making
inferences.
Banerjee et al.’s SEECM
model rejects
correctly the null
hypothesis of
symmetry in speeds of adjustment more frequently, about 95% of time in table(3).
However, the rejection frequency for the null
hypothesis of symmetric
adjustment is low (5.2%) like other models. Moreover in 4.3% of
short-run
time the model
wrongly infer on non-equality of constant terms. As a result (from tables (3) and (4))
when the error terms are white-noise, Monte Carlo experiment suggests that inference
in speeds of adjustment and constant terms might be illuminating in this model.
22
Table3: Monte Carlo simulation results for average estimation’s bias in different asymmetric models for the following values when the error terms are white
noises.
Null
Null
Null
Model / Values
γ0
δ0
γ1-1
δ1-1
γ2
δ2
γ0
δ0
γ1-1
δ1-1
γ2
δ2
0
1
2
HN
HN
HN
Value of coefficients
Rejection Frequency of
1
1
-0.1
-0.4
0.07
0.04
from DGP((17), (18) and
ϕ − ϕˆ
%Bias= (
)*100
(19)) (True Values)
Null Hypothesis (%)
ϕ
Symmetric ECM using
0.064
-0.271
0.531
Engle-Granger two-step
(A) Asymmetric ECM
0.013
-0.275 -0.273
0.545
0.513
99
-175
32
-678 -1181
4.4
6.3
(23)
(B) Godby et al. (24)
τ = ∆Xt-2
-0.336
0.558
0.447
98
106
-95
15.9 -698 -1018
-0.06 -0.195
0.02
τ = ∆Xt-1
0.02
-0.06 -0.185
-0.339
0.564
0.438
98
107
-86
15.1 -706
-994
99.7
5.2
τ =0
0.59
-0.57 -0.118
40
157
94
-0.415
0.075
0.0402
-18.5
-3.8
-6.8
-0.48
(C) TAR model based on
Banerjee et al. (13)
SEECM
τ = ∆Xt-2
0.791
1.24
-0.195
-0.335
0.561
0.450
21
-24
-95
16.1 -701 -1024
τ = ∆Xt-1
0.75
1.25
-0.185
-0.339
0.566
0.439
25.3 -24.5
-85
15.3 -709
-999
τ =0
5.2
1.06
1.07
-0.118
-0.416
0.077
0.044
-5.5
-6.77 -18.1 -4.01 -9.97 -11.7
4.3
95
(D) TAR model based on
Phillips and Loretan (16)
NLS
τ = ∆Xt-2
0.789
1.24
-0.194
-0.334
0.561
0.449
21
-24.0
-94
16.4 -701 -1024
τ = ∆Xt-1
1.24
-0.184
-0.338
0.567
0.439
26
-24.3
-84
15.5 -710
-999
0.742
τ =0
8.6*
1.06
1.06
-0.118
-0.414
0.077
0.045
-5.6
-6.13 -18.4
-3.5 -10.4 -11.7
12.4
99
* 8.6% in model (D) is relatively better than 5.2% in models (B) and (C).
Models A and B are based on Engle-Granger Two-Step procedure. The suggested models C and D are based on simultaneous estimation of cointegrating vector
and ECM.
Although I know the correct threshold value is zero in DGP, but I have included two arbitrary threshold values to show how a wrong threshold affects
estimations. Since the hypothesis testing under incorrect threshold does not have a known distribution, the test results are not reported for them.
23
RSS
234
232
228
227
193.4
225
225
190.7
226
225
190.9
Table4: Monte Carlo simulation results for average estimation’s bias in different asymmetric models for the following values when the error terms are white
noises.
Null
Null
Null
Model / Values
γ0
δ0
γ1-1
δ1-1
γ2
δ2
γ0
δ0
γ1-1
δ1-1
γ2
δ2
0
1
2
HN
HN
HN
Value of coefficients
Rejection Frequency of
1
1
-0.3
-0.5
0.27
0.14
from DGP((17), (18) and
ϕ − ϕˆ
%Bias= (
)*100
(19))(True Values)
Null Hypothesis (%)
ϕ
Symmetric ECM using
0.023
-0.418
0.410
Engle-Granger two-step
(A) Asymmetric ECM
-0.056
-0.422
0.480
0.331
106
-41
-78
-136
3.8
9.6
-0.418
16.3
(23)
(B) Godby et al. (24)
τ = ∆Xt-2
-0.029 -0.05 -0.372
-0.462
0.461
0.335
103
105
-24
7.6
-71
-139
τ = ∆Xt-1
-0.045 -0.07 -0.366
-0.466
0.478
0.320
105
107
-22
6.7
-77
-129
57.4
47.9
9.6
τ =0
0.20
-0.30 -0.321
80
131
-0.512
0.271
0.129
-6.9
-2.5
-0.3
8.1
(C) TAR model based on
Banerjee et al. (13)
SEECM
τ = ∆Xt-2
0.941
1.15
-0.372
-0.462
0.463
0.338
5.9
-14.9
-24
7.6
-72
-141
τ = ∆Xt-1
0.911
1.14
-0.366
-0.466
0.480
0.322
8.9
-14.1
-22
6.7
-78
-130
τ =0
47.7
9.0
1.03
1.03
-0.320
-0.513
0.275
0.136
-3.5
-2.7
-6.7
-2.5
-1.7
3.0
4.9
(D) TAR model based on
Phillips and Loretan (16)
NLS
τ = ∆Xt-2
0.935
1.15
-0.369
-0.461
0.464
0.338
6.5
-14.6
-23
7.8
-72
-141
τ = ∆Xt-1
0.910
1.14
-0.365
-0.465
0.480
0.323
8.9
-13.8
-22
7.1
-78
-131
τ =0
15.9*
1.03
1.02
-0.319
-0.512
0.274
0.136
-3.3
-2.5
-6.4
-2.5
-1.6
2.9
12.7
69.9
* 15.9% in model (D) is relatively better than 9.6% and 9% in models (B) and (C).
Models A and B are based on Engle-Granger Two-Step procedure. The suggested models C and D are based on simultaneous estimation of cointegrating vector
and ECM.
Although I know the correct threshold value is zero in DGP, but I have included two arbitrary threshold values to show how a wrong threshold affects
estimations. Since the hypothesis testing under incorrect threshold does not have a known distribution, the test results are not reported for them.
24
RSS
204
203
201
201
193.4
199
199
191.2
199
199
191.4
Phillips and Loretan’s NLS model rejects correctly null hypothesis of symmetry
in speeds of adjustment more frequently; about 99% of time in table(3). However, the
rejection frequency for the null hypothesis of symmetric short-run adjustment is as low as
8.6%. Moreover in 12.4% of instances the model wrongly infers on non-equality of
constant terms. However in table (4), with larger differences, the rejection frequency of
null hypothesis H 2N increases and rejection frequency of null hypothesis H1N decreases.
As a result when the error terms are white-noise (tables(3) and (4)), Monte Carlo
experiment suggests that inference in speeds of adjustment can be informative in models
B, C and D, but inference on short-run coefficients might be misleading, albeit NLS still
reveals short-run asymmetry more frequent than the other models. While some of the
investigated models (B, C and D) estimate short-run adjustments, on average, with small
biases, but all of them are weak in detecting the asymmetry by using statistical
inferences.
6.2. When error terms are non white noise stationary:
What happens to the estimations, if the existing error terms show some degree of
persistence between periods? I generate the second data set based on the assumption that
current disturbance terms are dependent to the last period’s disturbance terms.
(26)
Yt=γ0+γ1Yt-1+γ2Xt+γ3Xt-1+ε1t
if ∆Xt >0
(27)
Yt=δ0+δ1Yt-1+δ2Xt+δ3Xt-1+ε2t
if ∆Xt ≤ 0
(28)
Xt=Xt-1+ε3t
(29) ε1t =ρ1ε1t -1 + ν1t and ε2t =ρ2ε2t -1 + ν2t and ε3t =ρ3ε3t -1 + ν3t
25
ν1t, ν2t and ν3t are generated randomly by using random normal distribution generator
with mean zero and standard deviation 1. Meanwhile ρ1, ρ2 and ρ3 are less than 1 to
satisfy stationarity of error terms.
I start with specifying the ECM for one of the above regimes. For instance
standard ECM for equation (26) is presented as per equation (9). Remember equation (9)
is derived based on the existence of a cointegrating vector β=1 and satisfaction of the
homogeneity condition:
∆Yt= γ0+ (γ1 -1) (Yt-1 - Xt-1) +γ2 ∆Xt+ε1t
But there is an autocorrelation structure according to (29). In this case the least squares
estimations of (9) are inefficient, hence the model must be corrected.
Remedy:
From (29) we have an existent autocorrelation problem in ECM (9). One remedy for the
existent autocorrelation is to include higher order autoregressive terms in the regression.
To show this, we can modify the model by subtracting ρ1∆Yt-1 from both sides of (9) to
obtain white-noise errors.
(30)∆Yt - ρ1∆Yt-1 = γ0 -ρ1γ0 +(γ1 -1)(Yt-1 - Xt-1) -ρ1(γ1 -1)(Yt-2 - Xt-2)+γ2 ∆Xt -ρ1γ2 ∆Xt-1 +ν1t
As a result, (30) is rearranged in the following format.
(31)∆Yt = γ0 -ρ1γ0 +(γ1 -1)(Yt-1 - Xt-1) -ρ1(γ1 -1)(Yt-2 - Xt-2)+γ2 ∆Xt -ρ1γ2 ∆Xt-1 +ρ1∆Yt-1+ν1t
Meanwhile from (28) we have Xt=Xt-1+ε3t, and according to (29) there is an
autocorrelation problem here. We can rewrite (28) as (32).
(32) ∆Xt=ε3t → ∆Xt= ρ3ε3t -1 + ν3t → ∆Xt= ρ3∆Xt-1+ ν3t → ∆Xt-ρ3∆Xt-1= ν3t
26
As result controlling of autocorrelation requires adding higher lag orders into the
standard ECM equation. This remedy first proposed by Phillips and Loretan (1991) for
the models which are estimated by NLS.
Therefore we use this type of remedy for our NLS estimations. In models which are
estimated by OLS, however, we use the usual remedy of adding lags of variables (not
adding more lags of error correcting structure) to the model.19
Models:
I compare four previously mentioned models (i.e. models A, B, C and D) and add more
lag structure to them to resolve autocorrelation problem. For our specific DGP, according
to (31) we have to include first and second lags of error correcting terms and first lag of
dependent variable and present and lagged independent variables to get white noise error
terms in NLS models. In OLS based estimations (i.e. models A′, B′ and C′) we add 3 lags
of dependent and independent variables, however, adding more lag structure does not
change the estimates of parameters of interest more significantly in our case.
(A′): Asymmetric ECM model
After estimation of cointegrating vector (1) in Engle-Granger two-step method and
obtaining the residuals from equation (2), we estimate (33) by OLS.
3
3
3
3
i =0
i =0
j=1
j=1
(33) ∆ Yt = γ0 + γsp+ (Zt −1 )+ + γsp− (Zt −1 )− + ∑ γ+2i(∆ Xt −i )+ + ∑ γ−2i(∆ Xt −i )− + ∑ γ+4 j (∆ Yt − j )+ + ∑ γ−4 j (∆ Yt − j )− + εt
Where Z+t − j = max{0, Zt − j} , Z−t − j = min{0, Zt − j} , ∆ X +t = max{0, ∆Xt} and ∆ X −t = min{0,
∆Xt}.
(B′): Godby et al. TAR model:
After estimating of cointegrating vector (1) and obtaining the residuals from equation (2)
we can estimate the following by OLS.
27
(34)
3
3
∆Yt= It [γ0+γSP1 Zt-1 + ∑ γ2i ∆Xt-i+ ∑ γ4j ∆Yt-j+γ3 Xt-1]
j=1
i =0
3
3
i =0
i =0
+(1- It) [δ0+δSP1 Zt-1 + ∑ δ2i ∆Xt-i+ ∑ δ4j ∆Yt-j+γ3 Xt-1]+εt
Where It =1 if ∆Xt>τ and It =0 if ∆Xt≤τ. Zt-1 is the lagged residual of cointegrating vector
in equation (1) (i.e. Yt-1- α̂ - β̂ Xt-1). The model is estimated for the thresholds of ∆Xt-1,
∆Xt-2 and zero.
(C′): TAR model based on Banerjee et al.’s SEECM
We estimate equation (13) with a modification for autocorrelation by OLS.
3
3
(35) ∆Yt = It[γ0+γSP1(Yt-1 - Xt-1) +γ ∑ γ2i ∆Xt-i+ ∑ γ4j ∆Yt-j]
i =0
j=1
3
3
i =0
i =0
+ (1- It) [δ0+ δSP1(Yt-1 - Xt-1) + ∑ δ2i ∆Xt-i+ ∑ δ4j ∆Yt-j] +εt
Where It =1 if ∆Xt>τ and It =0 if ∆Xt≤τ. In this model the thresholds are set to be ∆Xt-1,
∆Xt-2 and zero.
(D′): TAR model based on Phillips and Loretan’s NLS
We estimate (16) for thresholds of ∆Xt-1, ∆Xt-2 and zero with a modification to control
autocorrelation problem.
(36) ∆Yt = It[γ0+γSP1(Yt-1 -β1Xt-1) +γ20 ∆Xt+γSP2(Yt-2 -β1Xt-2) +γ21 ∆Xt-1 +γ4 ∆Yt-1]
+ (1- It) [δ0+δSP1(Yt-1 -β2Xt-1) +δ20 ∆Xt +δSP2(Yt-2 -β2Xt-2) +δ21 ∆Xt-1 +δ4 ∆Yt-1] +εt
Where It =1 if ∆Xt>τ and It =0 if ∆Xt≤τ.
Having DGP equations (26), (27), (28) and (29); table (5) shows simulation
results based on values of γ0=1, γ1=0.9, γ2 =0.07, γ3=0.03, δ0=1, δ1=0.6,δ2 =0.04, δ3=0.36 ,
τ=0 , ρ1=0.5, ρ2=0.5 and ρ3=0.2 . Also Table (6) presents simulation results for values of
γ0=1, γ1=0.7, γ2 =0.27, γ3=0.03, δ0=1, δ1=0.5,δ2 =0.14, δ3=0.36 , τ=0 , ρ1=0.5, ρ2=0.5 and
28
ρ3=0.2
I test the following Null hypothesis of symmetry against alternatives of
asymmetry for parameters in (26) and (27) for each model in all replications and report
frequency of the rejection in 5% significance level after the experiment is completed.
H0N : γ 0 = δ0
(37) 0
H A : γ 0 ≠ δ0
H1N : γ sp = δsp
1
H A : γ sp ≠ δsp
H 2N : γ 2 = δ2
2
H A : γ 2 ≠ δ 2
All the inferences are made based on p-values of standard F-tests. The simulation results
are reported in tables (5) and (6) and are nearly the same. Thus I focus on explanation of
table (5), and point out its differences with table (6) whenever it is necessary.
Less biased estimations and best results are highlighted in tables (5) and (6). The
highlighted results reveal that for obtaining less biased asymmetric parameters; choice of
the true threshold is crucial. Selection of a wrong threshold may result in largely biased
estimations.
Like the white-noise error terms case, the asymmetric ECM (i.e. model A′) in
tables(5) and (6) give biased estimations for constant term, short-run adjustment, and
speed of adjustment coefficients. The biases are large and hypothesis testing rarely rejects
the null hypothesis of symmetry when the true model is asymmetric. Therefore model A′
is not only biased but also misleadingly suggest symmetry.
Estimations of constant terms are generally biased with opposite signs in TAR
model based on Engle-Granger two-step procedure (i.e. model B′); even if we find the
correct threshold value. But single equation models like C′ and D′ estimate constant term
with smaller biases (look at bias percentages for γ0 and δ0 in all models). Meanwhile the
null hypothesis of equality of intercepts (i.e. γ0=δ0) is rejected more often in model B′
than models C′ and D′ (look at under column H0N ). In table(5), under correct choice of
29
threshold, B′ rejects null of symmetry (equality) in intercepts, 65.7% of the time,
compare with 9.7% and 17.8% in models C′ and D′. But we know that true values of
intercepts are 1 for both regimes. As a result estimations of intercepts are not only biased
in model B′, but also they result in wrong inference of non-equality of intercepts most of
the time. Therefore estimations of intercept in models C′ and D′ are not only less biased
but also they rarely end up with wrong inference. However SEECM (model C′) shows
better inferences than NLS (model D′) for constant terms. Remember that we can correct
Engle-Granger two-step method to get unbiased estimations for intercept by the method
which is already mentioned in subsection 6.1.
When the threshold value is correctly selected, long-run adjustment coefficients
are estimated with small biases, always by NLS model (D′) (see bias percentages under
γ1-1 and δ1-1 in tables 5 and 6). Furthermore, the null hypothesis of symmetry in speeds
of adjustment ( H1N ) is rejected frequently in all models except model A′ in table (5).
Since the data are generated based on asymmetry in speeds of adjustment, the best model
must offer the highest rejection frequency of null of symmetry. Rejection frequencies are
58.6%, 59.1% and 62.3%in models B′, C′ and D′ correspondingly. Among all these
models NLS gives the highest rejection of H 1N . However table (6) with new sets of
parameters, suggest that null hypothesis of symmetry is rejected frequently merely by
NLS. Look at column under H1N in table (6).
In tables (5) and (6), when the choice of threshold value is correct, short-run
adjustment coefficients are estimated with relatively small bias percentages in all models
except in model A′. Meanwhile the null hypothesis of symmetry is rejected rarely
30
amongst all the models. Rejection frequencies are 3.5%, 2.8% and 4.8% for models B′,
C′ and D′ correspondingly in table (5). However NLS (model D′) gives the highest
rejection percentage for H 2N , among all models (4.8% and 9.9% in tables (5) and (6)).
Godby et al.’s model rejects correctly null hypothesis of symmetry in speeds of
adjustment frequently (about 58.6% of time) in table(5) and less frequently(about 41.1%
of time) in table(6). However, the rejection frequency for the null hypothesis of
symmetric short-run adjustment is extremely low in both tables (5) and (6). Although this
model in 65.7% of time wrongly infers on non-equality of constant terms in table (5), but
this problem is partly mitigated in table (6). As a result (from tables (5) and (6)) when
the disturbance terms are stationary and auto-correlated, Monte Carlo experiments
suggest that inference in speeds of adjustment, constant terms and short-run coefficients
can be misleading in Godby et al. model.
Banerjee et al.’s SEECM model rejects correctly null hypothesis of symmetry in
speeds of adjustment frequently in table (5) (59.1% of time) and infrequently in table (6)
(42.4% of time). However, the rejection frequency for the null hypothesis of symmetric
short-run adjustment is extremely low in both tables (5) and (6). Moreover in 9.7% and
11.8% of time the model wrongly infer on non-equality of constant terms in tables (5)
and (6). As a result (from tables (5) and (6)), when the error terms are auto-correlated
stationary, Monte Carlo experiments suggest that inferences on long-term and short-term
adjustment coefficients might be relatively less illuminating in this model.
31
Table5: Monte Carlo simulation results for average estimation’s bias in different asymmetric models for the following values, when there is an autocorrelation in
the error terms.
Null
Null
Null
Model / Values
γ0
δ0
γ1-1
δ1-1
γ2
δ2
γ0
δ0
γ1-1
δ1-1
γ2
δ2
0
1
2
HN
HN
HN
Value of coefficients
from DGP((26), (27),
Rejection Frequency of
1
1
-0.1
-0.4
0.07
0.04
ϕ − ϕˆ
(28) and (29))(True
Average %Bias= (
)*100
Null Hypothesis (%)
Values)
ϕ
Symmetric ECM using
0.009
-0.138
0.355
Engle-Granger two-step
(A′)Asymmetric ECM
0.011
-0.152
-0.135
0.356
0.356
99
-0.52
66
-408
-789
4.2
4.3
(33)
(B′) Godby et al. (34)
τ = ∆Xt-2
0.04
-0.08 -0.079
-0.185
0.359
0.285
96
108
21
54
-413
-615
τ = ∆Xt-1
0.018 -0.06 -0.074
-0.187
0.372
0.292
98
106
26
53
-431
-630
τ =0
0.409 -0.39 -0.039
-0.237
59
139
61
41
65.7
3.5
0.049
0.024
30
41
58.6
(C′) TAR model based on
Banerjee et al. (35)
SEECM
τ = ∆Xt-2
0.348
0.65
-0.079
-0.185
0.36
0.288
65
35
21
54
-415
-620
τ = ∆Xt-1
0.302
0.69
-0.074
-0.188
0.373
0.295
70
31
26
53
-434
-638
τ =0
0.565
0.54
-0.039
-0.238
43
46
61
40
2.8
0.049
0.026
30
35
9.7
59.1
(D′) TAR model based on
Phillips and Loretan (36)
NLS
τ = ∆Xt-2
0.27
0.64
-0.12
-0.294
0.381
0.302
72
36
-20
26
-445
-654
τ = ∆Xt-1
0.26
0.64
-0.119
-0.267
0.373
0.296
36
-19.4
33
73
-434
-639
0.516
0.5
48
50
τ =0
4.8*
-0.081
-0.362
0.049
0.026
19.1
9.5
30
35
17.8
62.3
*4.8% in model (D′) is relatively better than 3.5% and 2.8% in models (B′) and (C′).
Models A′ and B′ are based on Engle-Granger Two-Step procedure. The suggested models C′ and D′ are based on simultaneous estimation of cointegrating
vector and ECM.
Although I know the correct threshold value is zero in DGP, but I have included two arbitrary threshold values to show how a wrong threshold affects
estimations. Since the hypothesis testing under incorrect threshold does not have a known distribution, the test results are not reported for them.
32
RSS
193
184
178
178
150
176
177
148
188
188
157
Table6: Monte Carlo simulation results for average estimation’s bias in different asymmetric models for the following values, when there is an autocorrelation in
error terms.
Null
Null
Null
Model / Values
γ0
δ0
γ1-1
δ1-1
γ2
δ2
γ0
δ0
γ1-1
δ1-1
γ2
δ2
0
1
2
HN
HN
HN
Value of coefficients
Rejection Frequency of
from DGP((26), (27),
1
1
-0.3
-0.5
0.27
0.14
ϕ − ϕˆ
(28) and (29))(True
%Bias= (
)*100
Null Hypothesis (%)
Values)
ϕ
Symmetric ECM using
0.01
-0.3
0.403
Engle-Granger two-step
(A′)Asymmetric ECM
0
-0.308
-0.303
0.46
0.353
100
-2.7
39
-70
-152
5.5
7.3
(33)
(B′) Godby et al. (34)
τ = ∆Xt-2
-0.029 -0.05 -0.092
-0.199
0.467
0.332
102
105
69
60
-73
-137
τ = ∆Xt-1
-0.020 -0.08 -0.098
-0.184
0.473
0.302
103
108
67
63
-75
-115
τ =0
0.225 -0.28
78
128
45.9
41.1
7.9
-0.21
-0.395
0.265
0.136
30
21
2.0
2.7
(C′) TAR model based on
Banerjee et al. (35)
SEECM
τ = ∆Xt-2
0.587 0.806 -0.095
-0.204
0.470
0.334
41
19.4
68
59
-74
-139
τ = ∆Xt-1
0.581
0.78
-0.1
-0.186
0.479
0.308
42
22
67
63
-77
-120
τ =0
42.4
7.1
0.762 0.734 -0.211
-0.399
0.267
0.141
24
27
30
20
1.0
-0.6
11.8
(D′) TAR model based on
Phillips and Loretan (36)
NLS
τ = ∆Xt-2
0.553 0.792 -0.306
-0.491
0.472
0.336
45
21
-2
1.8
-75
-140
τ = ∆Xt-1
0.557 0.764 -0.314
-0.459
0.478
0.307
44
24
-4.7
8.3
-77
-119
τ =0
9.9*
0.704 0.674 -0.252
-0.552
0.269
0.14
30
33
15.9 -10.3
0.3
0.2
20.2
69.3
* 9.9% in model (D′) is relatively better than 7.9% and 7.1% in models (B′) and (C′).
Models A′ and B′ are based on Engle-Granger Two-Step procedure. The suggested models C′ and D′ are based on simultaneous estimation of cointegrating
vector and ECM.
Although I know the correct threshold value is zero in DGP, but I have included two arbitrary threshold values to show how a wrong threshold affects
estimations. Since the hypothesis testing under incorrect threshold does not have a known distribution, the test results are not reported for them.
33
RSS
238
231
237
237
214
234
235
211
235
236
225
Phillips and Loretan’s NLS model rejects correctly null hypothesis of symmetry
in speeds of adjustment more frequently, 62.3% and 69.9% of time in tables (5) and (6).
However, the rejection frequency for the null hypothesis of symmetric short-run
adjustment is extremely low in both tables (5) and (6). Moreover in 17.8% and 20.2 % of
time the model wrongly infers on non-equality of constant terms in tables (5) and (6). As
a result when the error terms are non white-noise but stationary, Monte Carlo
experiments suggest that inferences in speeds of adjustment and constant terms can be
relatively illuminating, but inference in short-run coefficients can be misleading for low
rejection frequency of linearity. However NLS still reveals short-run asymmetry more
frequent than the others.
6.3. Other simulations:
In addition to the above simulations, three other sets of simulations are
performed; the simulation results are available upon request from the author. The first
group of Monte Carlo experiments deals with different sample sizes. In a separate set of
experiments, I have shown that power of the null hypothesis of symmetry is increasing by
sample; however, estimation bias shows no tendency to decline with the sample size,
similar to results of Holly, Turner and Weeks (2003). As a result we have faced with a
special type of small sample property.
The second group of Monte Carlo experiments deals with estimates, bias
percentage and rejection frequency of the following null hypothesis for cointegrating
vectors (i.e. βs). According to what is mentioned in subsections 6.1 and 6.2, Monte Carlo
experiments furnishes us with the estimates of cointegrating vectors in all models.
Remember in the models based on EG two-step procedure we estimate cointegrating
34
vector primarily and then estimate ECM, therefore we have a single estimate for β in all
models A, B, A′ and B′. When we estimate cointegrating vectors simultaneously in two
regime models (models C, D, C′, and D′ ) we have estimates of two βs for the relevant
regimes. As we generate data based on true values of β =1, we can test these null
hypothesis H0: β=1 (for models A, B, A′ and B′) and H′0: β+ regime=β- regime=1 (for models
C, D, C′, and D′) for the known threshold τ=0. The simulation results indicate that βs
estimates of NLS are slightly better (less biased) than other models. Furthermore the true
null hypothesis of H′0 is infrequently rejected by NLS, compare with frequent rejection of
H0, especially when the error terms are autocorrelated.
The third group of simulations deals with symmetric DGP. The results indicate
that simultaneous estimation of cointegrating vector and ECM performs as good as linear
models (bias percentages are about the same). Furthermore hypothesis testing of null of
symmetry in NLS model does not work as well as OLS based models; however, they
generally confirm existence of a linear (symmetric) DGP. Meanwhile to ensure that we
are dealing with a nonlinear model we can perform a nonlinearity test, like RESET which
traces nonlinearity at the beginning, to avoid misleading inferences.
7. Conclusion:
It seems that part of the estimation bias in asymmetric parameters reflects the bias
associated with Engle-Granger estimations in small samples. As it is shown in the
simulation results, in none of the cases asymmetric ECM and Godby et al. model (2000)
(i.e. most of the studies presented in tables 1 and 2) which are based on Engle-Granger
two step estimation of cointegrating vector, have a substantial advantage to the others.
Furthermore, constant terms are estimated with large bias in models that are based on
35
Engle-Granger two-step procedure; although there is simple remedy for that. But, single
step estimations of ECM like SEECM and NLS are relatively superior based on their bias
percentage and inferences.
Among all the models in table 1, asymmetric ECM usually returns the most
biased estimations and wrong inferences of symmetry; however, TAR ECM returns better
estimates and inferences. TAR ECM model (Godby et al.(2000) model in table1) estimate
speeds of adjustment and short-run run coefficients with small biases when the error
terms are white-noise. While error terms are auto-correlated, this model can usually
estimate short-run adjustment coefficients with small bias. Experiment results show that
when error-terms are auto-correlated, TAR ECM models might support more often
symmetry than asymmetry. However, simultaneous estimations of cointegrating vector
and ECM by SEECM and NLS methods result in relatively smaller bias and stronger
inferences, when the error terms are white-noise. But, when we include auto-correlation
into the data, SEECM returns larger bias in speeds of adjustment estimation in some
cases. Nevertheless, NLS returns relatively better results, almost in all cases.
Furthermore, all of the results in the tables 3, 4, 5 and 6 testify on undeniable importance
of the choice of threshold value. Bias increases when we select incorrect threshold
values.
Finally it seems that asymmetric ECM and TAR ECM models that are based on
Engle-Granger two-step are affected and can be improved by NLS estimations, however,
for other nonlinear procedures which do not use the above mentioned approaches a
further investigation is needed.
36
Appendix 1:
Suppose we have two different samples of one data set. Sample one with T1 observations
and sample two with T2 observations. Therefore we use X1 and Y1 for sample 1 and X2
and Y2 for sample 2. As a result we have Y= Y1+ Y2 and X= X1+ X2 with T = T1+ T2
observations. If Y1 and X1 are cointegrated with a cointegrating vectorβ, as well as Y2
and X2 we have the following relations.
(I)
Y1= βX1 + υ1
where υ1 is stationary
(II)
Y2= βX2 + υ2
where υ2 is stationary
We can show that Y and X will be cointegrated with the same cointegrating vector. We
can rearrange (I) as
Y-Y2= β(X-X2) + υ1
Thus
Y=Y2+ β(X-X2) + υ1
And then replace (II) in the last relation and we have
Y=βX + υ1+υ2
We can replace υ = υ1+υ2, and it is stationary. As a result we have the following
cointegrating vector.
(III)
Y= βX + υ
37
References:
Bachmeier, L. and Griffin, J. “New Evidence on Asymmetric Gasoline Price Responses”, Review
of economics and Statistics, 85 (2003) 772-776.
Bacon, R.W. “Rockets and Feathers: the asymmetric speed of adjustment of UK Retail Gasoline
Prices to Cost Changes”, Energy Economics, vol.13 (3) (1991) 211-218.
Balke, N., Brown, S. and Yucel, M. “Crude Oil and Gasoline Prices: An Asymmetric
Relationship?” Federal Reserve Bank of Dallas Economic Review, (1998) First Quarter 2-11.
Banerjee, A., Dolado, J., Galbraith, J. W. and Hendry, D. F. “Co-Integration, Error-Correction,
and the Econometric Analysis of Non-stationary Data”, Oxford University Press (1993), reprinted
2003.
Banerjee, A., Dolado, J., Hendry, D. F. and Smith G.W. “Exploring Equilibrium Relationships in
Econometrics through Static Models: some Monte Carlo Evidence”, Oxford Bulletin of
Economics and Statistics, 48(1986) 253-278.
Bettendorf, L., Van der Geest, S. and Varkevisser, M. “Price Asymmetry in the Dutch retail
gasoline market” Energy Economics 25(2003) 175-190.
Borenstein, S., Cameron, A.C., and Gilbert, R. “Do Gasoline Prices respond symmetrically to
Crude Oil Price Changes?” Quarterly Journal of Economics, vol 112(1997) 305-339.
Borenstein ,S. and Shepard, A., “Sticky Prices, Inventories, and Market Power in Wholesale
Gasoline Markets”, RAND Journal of Economics, vol33(2002) 116-139.
Brown, S. and Yucel, M. “Gasoline and Crude Oil Prices: Why the Asymmetry?”, Economic
and Financial Review , 3rd Q (2000) 23-29.
Cook, S., Holly, S. and Turner, P. “The power of tests for non-linearity: the case of Granger-Lee
asymmetry”, Economics Letters, 62(1999), 155-159.
Enders, W. and Granger, C. W. J. “Unit-Root tests and asymmetric adjustment With an Example
using the Term Structure of Interest Rates”, Journal of Business & Economic Statistics, July
(1998) 304-311.
Enders, W. and Siklos, P.L. “Cointegration and Threshold adjustment”, Journal of Business &
Economic Statistics, April(2001) 166-176.
Engle, R.F. and Granger, C.W.J. “Co-integration and Error Correction: Representation,
Estimation and Testing”, Econometrica, 55(1987) 251-276.
Ericsson, N.R. and MacKinnon, J.G. “Distributions of error correction tests for Cointegration”,
Econometrics Journal, 5(2002) 285-318.
Fan, J. and Yao,Q. " Nonlinear time series Nonparametric and Parametric methods”, Springer
Verlag, (2005).
38
Galeotti, M., Lansa, A., and Manera, M. “Rockets and feathers revisited: An international
comparison on European gasoline market”, Energy Economics, 25 (2003) 175-190.
Godby, R., Lintner, A.M., Stengos, T. and Wandschneider, B. “Testing for Asymmetric Pricing in
Canadian Retail Gasoline Market”, Energy Economics, vol 22(2000) 251-276.
Granger,C.W. and Yoon, G. “Hidden cointegration” University of California, San Diego,
Department of Economics Working Paper, 2002.
Hamilton, J. “What is an oil shock?” Journal of Econometrics, 113(2003) 363– 398.
Holly, S., Turner, P. and Weeks, M. “Asymmetric Adjustment and Bias in Estimation of an
Equilibrium Relationship from a Cointegrating Regression”, Computational Economics 21(2003)
195-202.
Karrenbrock, J. “The behavior of retail gasoline prices: symmetric or not?” Federal Reserve Bank
of St. Louis, July/August 1991, 19-29.
Phillips, P.C.B. and Loretan, M. “Estimating long-run economic equilibria”, Review of Economic
Studies, 58(1991), 407-436.
Rodchenko, S. “Oil price volatility and the asymmetric response of gasoline prices to oil price
increases and decreases”, Energy Economics, vol 27(2005) 708-730.
Shin, D. “Do product prices respond symmetrically to changes in crude prices?”, OPEC Review ,
summer (1994) 137-154.
Notes:
1- For U.S., look at Karrenbock (1991) or Balke, Brown, and Yücel (1998). For Canada, look at Godby,
Stengos, Lintner, Wandschnider (2000). For Dutch look at Bettendorf, Van der Geest and Varkevisser
(2003). For the other countries although this is not stated explicitly, perception of the existent noncompetitive gasoline market persuade governments to intervene.
2- Borenstein, Cameron, Gilbert (1997) found an asymmetric relationship between weekly wholesale, retail
gasoline and crude oil prices in U.S. market. Brown and Yucel (2000) find an asymmetric relationship for
weekly data. Borenstein and Shepard (2002) find evidence of asymmetry between wholesale gasoline and
crude oil prices for U.S. They also find that firms with market power adjust prices more slowly than
competitive firms. Radchenko (2005) find evidence of asymmetry for U.S. weekly data and attribute it to
the market power.
3- Commonly used methods are concentrated only on asymmetric adjustment to a long-run equilibrium,
and not on asymmetric cointegrating vectors.
4 - See for instance, Bacon (1991), Shin (1994), Borenstein, et al. (1997), Godby et al. (2000), Bachmiere
and Griffin (2003), Galeotti et al. (2003) and Radchenko (2005).
5- Therefore I do not compare some other types of models that have been employed in this literature, which
are inconsistent or they ignore existence of unit root in the time series. For example: Bacon (1991) and Shin
(1994) estimate the model using structural econometric methods, without testing for the stationarity of
series. Moreover Balke, Brown, and Yücel (1998), work with stationary price series and estimate a VAR
model in levels, but we know that prices are usually treated as I(1) in the economics. Also Karrenbrock
(1991), without testing for Unit Root in the series, uses a model (single equation VAR), with no tendency
to return to equilibrium level after a shock.
39
6- Although NLS is applied in Bacon (1991), quadratic partial adjustment model has other weaknesses like
asymmetry grows with an increase in the difference between current and long-run equilibrium prices
(Boresnstein et al. 1997).
7- In fact, he uses a VAR model to trace source of asymmetry, but for creating proxies of the gasoline price
asymmetry he follows the asymmetric ECM procedure and use an OLS estimation procedure in estimating
cointegration and ECM.
8 - Granger representation theorem, states that for any set of I(1) variables, error correction and
cointegration are equivalent representations.
9 -Borenstein, Cameron and Gilbert (1997), Brown and Yücel (1998), Bachmeier and Griffin (2003),
Bettendorf, van der Geest and Varkevisser (2003), Galeotti, Lanza and Manera (2003) and Radchenko
(2005) have used a variety of this type of model.
10- Enders and Granger (1998) introduce an asymmetric unit root test, and Enders and Siklos (2001) derive
an asymmetric ECM on that basis. Their asymmetric ECM (MTAR model) reveals asymmetry only in the
speeds of adjustment and not in short-run adjustment. Therefore the studied models have advantage on
MTAR, because they include asymmetry in short-run adjustments as well.
11- see Banerjee et al. (1986). This type of condition is called homogeneity restriction
12- In this model testing for the cointegration is based on null of no cointegration H0: b = 0, for which the t
statistic is not asymptotically normally distributed under the null. Therefore we need to use critical values
other than standard t distribution. These critical values are tabulated for this symmetric SEECM by
Banerjee et al. (1993) and Ericsson and MacKinnon (2002).
13- Thus the t distributions are still asymptotically reliable when we are dealing with non-linear model
estimations.
14 - Remember equation (9) is designed for the cointegrating vector β=1.
15- I have adapted this type of DGP, because the exogenity assumption is in line with general perception
that causality goes from input price (crude oil) to output price (gasoline). Also it is in line with the majority
of studies in this area. Nonetheless, Borenstein et al. (1997) and Borenstein et al. (2002) use a type of nonstandard ECM in which they believe on existence of endogenity. But most of the authors in this literature
believe on the existence of the long-run the relation (1). Meanwhile, the Banerjee et al. DGP, guarantees
existence of such long-run equilibrium (equation 1) at the presence of exogenous crude oil prices.
16- Whereas variances of all the generated random numbers in DGP are 1, we can rewrite (6) as single
equation (24).
17- When a system is exploding, consequences of a shock into the system not only does not die, but also
increases over time.
18- Results of Monte Carlo simulation for this modification are not reported here, because it does not affect
estimations of other parameters of interest. The estimation results are available from the author upon
request.
19- This is the reason behind adding more lag structure in ADF unit-root test compare with DF test. To
investigate how ECMs are treated at the presence of autocorrelation, consult with Phillips and Loretan
(1991), for instance.
40