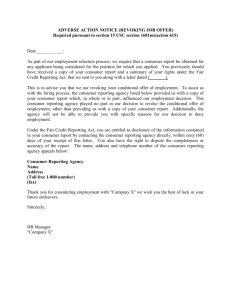
Conditionally Heteroskedastic Factor Model with Skewness and Leverage Effects Prosper Dovonon
advertisement

Conditionally Heteroskedastic Factor Model with Skewness and
Leverage Effects
Prosper Dovonon∗
CIREQ and Université de Montréal
prosper.dovonon@umontreal.ca
August 15, 2006
Abstract
Conditional heteroskedasticiy, skewness and leverage effects are well known features of financial
returns. The literature on factor models has often made assumptions that preclude the three effects to occur simultaneously. In this paper we propose a conditional heteroskedastic factor model
that takes into account the presence of both the skewness and the leverage effects. We show that
our model is robust to temporal aggregation. We then provide moment conditions that allow for
inference by the Generalized Method of Moments (GMM). We conduct a Monte Carlo experiment
to evaluate the finite sample properties of our estimation method. We also propose an extended
Kalman filter procedure that provides a filter for both the latent factor and the volatility processes.
We apply our model to a set of 24 U.K. indices, including the FTSE 350 and 23 U.K. sectorial
indices. Our results confirm, for conditionally heteroskedastic factor models for daily returns, the
main findings in Harvey and Siddique (1999) (see also Jondeau and Rockinger (2003)) for univariate
GARCH-type models for several data sets, namely that inclusion of conditional skewness impacts
the persistence in conditional variance. We also find evidence for persistent conditional skewness.
Moreover, the volatility process filtered by our model’s estimates seems to capture large shocks on
returns better than the one filtered by the Doz and Renault (2004) model’s estimates which ignore
both skewness and leverage in data.
Keywords: Dynamic heteroscedasticity; factor models; leverage; skewness; volatility; temporal
aggregation; generalized method of moments; extended Kalman filter.
∗
I thank my advisors Sı́lvia Gonçalves and Éric Renault for their guidance and support, and Nour Meddahi for helpful
comments.
1
1
Introduction
Conditional heteroskedasticiy is a well-known feature of financial returns. In addition, returns are
often characterized by the presence of skewness (i.e. returns have an asymmetric distribution) and
leverage effects (i.e. the fact that a negative shock on returns has a larger impact on volatility than
a positive shock of the same magnitude). See for example Nelson (1991), Glosten, Jagannathan and
Runkle (1993) and Engle and Ng (1993) for studies documenting the presence of leverage effects in
financial time series, and Ang and Chen (2002) and Harvey and Siddique (1999, 2000) for the skewness
effect.
The finance literature has recognized the importance of taking into account higher order moments
in asset pricing models. An early example is Rubinstein (1973) (see also Kraus and Litzenberger
(1976) for an empirical implementation of Rubinstein’s (1973) model), who proposes an extension of
the capital asset pricing model (CAPM) allowing for skewness in the unconditional distribution of
returns. More recently, Harvey and Siddique (2000) extend Kraus and Litzenberger’s (1976) model to
the dynamic context by allowing third conditional moments to be time varying. The option pricing
literature has also recognized the importance of modeling higher order moments. In particular, as
pointed out by Hull and White (1987), the misspecification of the third order conditional moment can
yield inaccurate option prices. This has motivated the development of option pricing models that take
into account the skewness effect in the underlying asset. One recent example is Christoffersen, Heston
and Jacobs (2006).
In the univariate context, Harvey and Siddique (1999) and Jondeau and Rockinger (2003) find
that taking into account the skewness effect has an impact on the volatility persistence estimates.
More specifically, for a set of daily and monthly index returns, Harvey and Siddique (1999) estimate
univariate GARCH-type models that allow for time-varying conditional third-order moments. Their
empirical results show that the estimates of volatility persistence decline when the model allows for
the presence of skewness. They also find that the leverage effect tends to disappear following the
introduction of skewness. These results are confirmed by Jondeau and Rockinger (2003), who also
consider the effects of modeling the kurtosis in addition to the skewness effect. These studies show that
empirically it is important to model the skewness and the leverage effects when building conditional
heteroskedastic models for asset returns.
Although the finance literature in the univariate context has recognized the importance of modeling
skewness and leverage effects, few attempts have been made to model both effects jointly in the
multivariate framework. This is the case in the conditionally heteroskedastic factor model literature.
In their seminal paper, Diebold and Nerlove (1989) assume Gaussianity and postulate that the common
factor follows an ARCH model, therefore not allowing for the presence of skewness nor leverage. More
recently, Fiorentini, Sentana and Shephard (2004) propose a conditionally heteroskedastic factor model
that allows for a dynamic leverage effect but impose a Gaussianity assumption that rules out skewness.
In this paper we extend the existing class of multivariate conditionally heteroskedastic factor models
by specifying simultaneously the skewness and the leverage effects. To the best of our knowledge, we
are the first to write and estimate a conditionally heteroskedastic factor model that specifies jointly
these two effects. In our model, all the dynamics in moments (and cross sectional, or co-moments) of
asset returns are driven by a common latent factor. The conditional heteroskedasticity of the common
factor follows a square root stochastic autoregressive volatility model (SR-SARV) as in Andersen
(1994), Meddahi and Renault (2004) and Doz and Renault (2004). The leverage effect is modelled
as an affine function of volatility. This specification encompasses many of the existing models in the
literature (e.g. the affine process of Dai and Singleton (2000)). The skewness effect is also modelled
as an affine function of volatility. We show that this specification is robust to temporal aggregation
when the leverage effect is present.
Recently, Doz and Renault (2004) (henceforth DR (2004)) study the identification and estimation
2
of a conditionally heteroskedastic factor model. Specifically, DR (2004) provide a set of moment
conditions that identify their factor model and allow for inference by Generalized Method of Moments
(GMM), thus avoiding restrictive distributional assumptions. Our model is an extension of DR’s
(2004) model that explicitly models the skewness and the leverage effects. We follow DR (2004) and
provide a set of moment conditions that identify the parameters of our extended model. We conduct
a Monte Carlo experiment to investigate the finite sample properties of our estimation procedure for
several values of the volatility persistence. We find that the method performs well in term of bias and
root mean square error (RMSE) across our different models, except when the volatility persistence is
very close to one.
We consider an empirical application of our model to a set of 24 daily stock index returns, including
the FTSE 350 stock index return and 23 sectorial U.K. index returns1 . A monthly version of these
data has previously been modelled by Harvey, Ruiz and Sentana (1992) and Fiorentini, Sentana and
Shephard (2004) with a conditional heteroskedastic factor model. Our empirical study differs from
theirs in that we analyze daily data and we model explicitly the dynamics of conditional higher order
moments beyond the first and the second moment. For our data, we document strong evidence of
conditional heteroskedasticity, as well as leverage and skewness effects for all series. We also find
evidence of co-skewness between the sectorial indices and the FTSE 350 index. We perform a test
developed by DR (2004) to test for conditional heteroskedasticity in the common factor and reject
the null of conditional homoskedasticity. Our empirical findings suggest the appropriateness of a
conditionally heteroskedastic factor model with asymmetries (i.e. with leverage and skewness effects).
We estimate our model by GMM. The fact that the volatility persistence for each asset is far away
from one suggests that our procedure is valid in this application, given our Monte Carlo results. We
also estimate the DR (2004) version of our model for which the skewness and leverage effects are not
explicitly modeled. We find that there is a significant leverage effect in sectorial returns through a
common factor confirming, for daily data the main result in Sentana (1995) for U.K. monthly index
excess returns. The factor’s volatility persistence estimates for both models appear to be very close
suggesting that the volatility persistence is not impacted by our models for skewness and leverage.
Furthermore, the volatility persistence we estimate is smaller than expected for daily returns. Because
none of the conditionally heteroskedastic factor models we estimate precludes the skewness, this low
volatility persistence agrees with the empirical fact documented by Harvey and Siddique (1999) and
Jondeau and Rockinger (2003) for univariate GARCH-type models, namely that conditional variance
is less persistent when the conditional skewness is not ruled out. We also document the fact that
larger volatility seems to announce more negatively skewed conditional distribution for the returns.
In our framework the common factor and the volatility for each asset are latent processes. We
therefore propose an extended Kalman filter algorithm that provides a filter for both the latent factor
and the volatility processes. Our filter algorithm is different from the filters proposed by Diebold and
Nerlove (1989) and King, Sentana and Wadhwani (1994), where the volatility process is a deterministic function of the latent factor process. Here both the latent factor and the volatility processes
are unobserved and need to be considered as state variables. We apply our filter to the conditionally
heteroskedastic factor model with the parameters estimated by the moment conditions given in DR
(2004). We then perform some diagnostic tests on the filtered factor and volatility processes. Based on
these tests, we cannot reject the correct specification of our models for the third conditional moments
and the leverage effects. Moreover, we find that the filtered volatility process by our model’s estimates
seems to perform better than the filtered volatility process by the DR (2004) model’s estimates particularly in the periods of large shocks on returns. We explain this performance by the effiency gain
resulting from the returns’ asymmetries modeling.
1
We consider in this application the 25 index excess returns listed in Appendix B except the FTSE All Share Ex. Inv.
Trusts index excess return because it is highly correlated with the FTSE 350 index excess return (.99) which is included
in the models estimation.
3
The remainder of the paper is organized as follows. In Section 2, we present the summary statistics
for the data used in our empirical application. We also document the presence of dynamic leverage
and skewness effects in our series. Section 3 presents our conditionally heteroskedastic factor model
with skewness and leverage effects. Section 4 studies its temporal aggregation properties. Section 5
discusses the identification and estimation of the model. Section 6 contains the Monte Carlo study
whereas Section 7 contains the empirical results. Section 8 concludes. The extended Kalman filter
algorithm is presented in Appendix A. Appendix B contains the data description and all the tables
with the empirical results. The proofs appear in Appendix C.
2
Empirical motivation
In this section we provide some empirical motivation for the need to account for asymmetric effects
in both the distribution (skewness) and the conditional variances (leverage) of the data used in our
empirical application. Our data set consists of 25 daily UK stock market index returns, including the
FTSE 350 and 24 other sectorial indices, all of which in the FTSE. The data source is Datastream.
Appendix B contains more details on the data. The period covered is January 2, 1986 to December
30, 2004, for a total of 4863 daily observations. Only trading days are considered. For each index, we
compute the daily log excess return, using the log return of the UK one month loan index, the JPM
UK CASH 1M, as the risk free interest rate. Appendix B contains all the tables with the empirical
results in the paper.
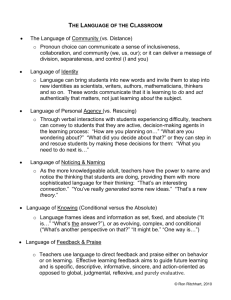
Figure 1: Q-Q plot of the FTSE 350 index daily excess return
3
FTSE350 Index Excess Return Quantiles
2
1
0
−1
−2
−3
−4
−5
−6
−4
−3
−2
−1
0
1
Standard Normal Quantiles
2
3
4
Table II gives some descriptive statistics for our data, including the sample skewness and the
kurtosis coefficients. We find that all indices have negative skewness except for the health sector
index, which has positive skewness. However, this is not statistically significant at the 10% level.
Out of the remaining 24 indices, 11 have statistically significant negative skewness. To test for the
significance of skewness, we use a Generalized Method of Moments-based test2 . Since the asymmetric
2
Skewness is a smoothed function of mean. The Generalized Method of Moment (GMM) theory (Hansen, 1982)
provides the asymptotic distribution of the error between sample and population mean. By the δ-method, we deduce
4
shape of a distribution can be seen through its third central moment, we also compute the third central
moments for our series which lead to the same conclusions as those from the skewness. The presence
of skewness in the distributions of the daily excess returns in the U.K. sectorial indices analyzed here
agrees with similar evidence for other financial return series found by Harvey and Siddique (1999),
Ang and Chen (2002) and Jondeau and Rockinger (2003), among others. Although the results in
Table II apply to excess returns, risk-free rate adjusted, we also found evidence of skewness for the
demeaned series, both adjusted for the day-of-the-week effect and filtered by autoregressions. Because
the results did not change substantially, we do not report these results here.
The coefficient of kurtosis is high for all series. Jointly with the values obtained for the skewness
coefficients, the excess kurtosis values suggest that the normal distribution is not an appropriate
description of our data, a stylized fact of many other financial time series. Figure 1 below confirms
this conjecture for the FTSE 350 stock index excess return. It gives the QQ plot for this series, i.e. it
plots the empirical quantiles of the FTSE 350 index excess returns against the corresponding quantiles
of the standard normal distribution. The departure from the normal3 distribution is clear and we can
also note the negative skewness of the FTSE 350 index.
Table II also shows strong evidence of conditional heteroskedasticity as indicated by Engle’s (1982)
Lagrange multipliers tests of orders 1 and 5, denoted Eng(1) and Eng(5), respectively. The values of
these statistics correspond to T R2 , where T is the sample size and R2 is the R-squared from the regression of squared returns on a constant in addition to one and five lagged squared return, respectively.
Under the null hypothesis of conditional homoskedasticity, T R2 follows a chi-squared distribution with
1 and 5 degrees of freedom, respectively. The results indicate strong rejection of the null hypothesis
of conditional homoskedasticity for all series. The Ljung-Box statistics for autocorrelation up to order
5 and 10 (QW(5) and QW(10) respectively) reveal the presence of potential autocorrelation in the
data. Similarly, the first order autocorrelation coefficients (ρ̂1 in the table) are statistically significant
for most time series, with some of the higher order autocorrelation coefficients remaining significant
for some of them. Nevertheless, their magnitude is not very large (for instance, ρ̂1 varies between 0.02
and 0.23).
In Table III we present the results of diagnostic tests for the impact of news on volatility, as
proposed by Engle and Ng (1993). These tests are the sign bias test, the negative size bias test, and
the positive size bias test. They test for the significance of including the level of past standardized
returns on the conditional variance equation and therefore can be used to test for the presence of
−
leverage effect. Specifically, the sign bias test is a t-test for the significance of a dummy variable St−1
(that takes the value one if the innovation to returns is negative and zero otherwise) in the regression
−
of squared standardized returns on St−1
. It checks whether volatility depends on the sign of the past
innovation to returns. The negative (positive) size bias test instead checks whether the size of a
negative (positive) return shock has an impact on volatility. We also include a joint test that tests
simultaneously if any of these effects is present. We performed the diagnostic tests on the standardized
excess return indexes (using a GARCH(1,1) model as the null model under consideration) and on a
filtered version of these, adjusted for the day-of-the-week and containing an autoregressive correction
term. Since the results are similar, we only report the results for the centered excess return series
in this paper. Table III shows that the sign bias test is significant for 10 out of the 25 time series
considered. Nevertheless, the negative and the positive size bias tests are strongly significant for nearly
all indices, which translates into significant joint tests for all of the series we analyze. We conclude
that a GARCH(1,1) model is not a good description of volatility for the UK sectorial indices because
from this distribution the asymptotic distribution of the error between the skewness and its sample estimate. We base
useful tests of skewness on this distribution. As Ang and Chen (2002), we estimate the long run variances by the 6-lags
Newey and West (1987) heteroskedasticity and autocorrelation robust estimator using the Bartlett kernel.
3
The Bera-Jarque normality test for dependent data proposed by Bai and Ng (2005) rejects the normality assumption
for all the series but we do not report the results here.
5
it misses important leverage effects present in the data.
Our results so far suggest that a realistic data generating process for our data set should incorporate
both leverage and skewness effects. Next we analyze the dynamic properties of these effects. In particular, we investigate the empirical content of two specifications for the conditional leverage and skewness
effects. We model the dynamic leverage and the skewness effects as affine functions of volatility. Specifically, let Yi,t+1 denote the excess return on the index i at time t+1 and let Σii,t+1 denote the conditional
variance of Yi,t+2 at t + 1. Let Jt denote the information set available at t. The conditional leverage
effect is given by Cov(Yi,t+1 , Σii,t+1 |Jt ), which we model as Cov(Yi,t+1 , Σii,t+1 |Jt ) = π0 + π1 Σii,t . We
test whether π1 is significantly different from zero by regressing ²i,t+1 × Σ̂ii,t+1 on 1 and Σ̂ii,t , where
²i,t+1 is the unanticipated part of Yi,t+1 , as measured by the centered excess return Yi,t+1 − Ȳ , and
where Σ̂ii,t+1 is the squared daily excess return at t + 2, used as a proxy4 for conditional volatility
Σii,t+1 of Yi,t+2 at t + 1. Similarly, we assume that the conditional skewness of excess returns is given
3
by E(Yi,t+1
|Jt ) = h0 + h1 Σii,t and test for the significance of h1 in the regression of ²3i,t+1 on 1 and
Σ̂ii,t .
The results also appear in Table IV. Both π1 and h1 are significantly different from 0 for all indices.
These results suggest that the leverage and skewness effects are time varying and their dynamics are
well captured by an affine function of volatility.
All of the index excess returns we consider seem to share the heteroskedasticity, the skewness
and leverage effects features. A parsimonious representation for our data could be a factor model in
which the factor bears these features. The GMM-based test for heteroskedastic5 factor representation
proposed by DR (2004), with a p-Value of .012 rejects the null of homoskedasticity of Yt ; the vector
of the index excess returns we consider. This test compliments the Engle’s (1982) Lagrange multiplier
test for heteroskedasticity we perform for each index and support evidence of heteroskedastic factor
representation for our data.
Unfortunately, to the best of our knowledge, there is no test for skewness and leverage effects in the
factor of a multivariate factor representation. We perform some useful regressions to investigate the
empirical content of an asymmetric factor model for our data. We argue that if the data have a factor
representation, the FTSE 350 index excess return should be a good proxy for this factor. And, for such
an asymmetric factor model to hold, both the conditional leverage and skewness effects in our series
should significantly be explained by the factor or equivalently by the FTSE 350 index excess return’s
volatility. Let Y1,t denote the FTSE 350 index excess return at time t, Σ11,t the conditional variance
2
of Y1,t+1 at time t and Σ̂11,t = Y1,t+1
its proxy. We test whether πf,1 , the slope of the regression of
²i,t+1 × Σ̂11,t+1 on 1 and Σ̂11,t is statistically significant and we also test whether hf,1 , the slope of the
regression of ²3i,t+1 on 1 and Σ̂11,t is significantly different from 0.
The results appear in Table IV. Both πf 1 and hf 1 are statistically significant for all indices. These
results suggest that the dynamic of the leverage and skewness effects can also be well captured by an
affine function of a common heteroskedastic factor volatility.
In the next section we will propose a conditionally heteroskedastic factor model that incorporates
dynamic conditional leverage and skewness effects modeled as affine functions of volatility.
4
Even though this proxy is known to be noisy, it gives us some insights for the dynamics in the skewness and leverage
effects for our data. We will complement this preliminary analysis with more sophisticated diagnostic tests for our model
in Section 7.
5
Doz and Renault (2004) propose a sequential test for the number of conditional heteroskedastic factors in a factor
representation. The first step of this test that we perform is a multivariate test for heteroskedasticity. It tests a
constant conditional variance of Yt against dynamic conditional variance. Specifically, the null hypothesis is E[(Yt+1 −
E(Yt+1 |Jt ))(Yt+1 − E(Yt+1 |Jt ))0 |Jt ] = C; C a time-invariant variance matrix. With appropriate instruments this set of
moment conditions can be tested by the GMM overidentification test. We perform this test including 3 instruments: 1
a
and two lagged squared FTSE 350 index excess return. Under the null, J − Stat ∼ χ250 . We obtain J = 75.386 leading
to the rejection of the null hypothesis. Thus a conditional heteroskedastic factor representation may be suitable for our
data.
6
3
The model
The main goal of this section is to propose a conditionally heteroskedastic factor model with skewness
and leverage effects. To introduce some notation, we first present a conditionally heteroskedastic factor
model for which these effects are not explicitly present. This model was recently studied by DR (2004)
in the context of IV identification and estimation by GMM (see also Diebold and Nerlove (1989),
King, Sentana and Wadhwani (1994), and Fiorentini, Sentana and Shephard (2004) for a discussion
of conditionally heteroskedastic factor models). We will then present our model, which extends DR’s
(2004) model to include skewness and leverage dynamics.
3.1
A benchmark model
Let Yt+1 be a N × 1 vector of (excess) returns on N assets from time t until time t + 1, Ft+1 a K × 1
vector of K unobserved common factors, and Ut+1 a N × 1 vector of idiosyncratic shocks. DR (2004)
consider the following conditionally heteroskedastic factor model for Yt+1 ,
Yt+1 = µ(Jt ) + ΛFt+1 + Ut+1 ,
(1)
with
E (Ut+1 |Jt )
E ¡(Ft+1 |Jt )
¢
0 |J
E Ut+1 Ft+1
t
V ar (Ut+1 |Jt )
V ar (Ft+1 |Jt )
=
=
=
=
=
0
0
0
Ω
Dt ,
(2)
where Jt is a nondecreasing filtration defining the relevant conditioning information set containing
the past values of Yτ , τ ≤ t and and Fτ , τ ≤ t, µ(Jt ) is a N × 1 vector of Jt −adapted components
representing the risk premia, Λ is the N × K (N ≥ K) full column rank matrix of factor loadings,
Dt is a diagonal positive definite matrix of K time-varying factor variances, and Ω is the conditional
covariance matrix of the idiosyncratic shocks Ut+1 .
The existing literature has made several assumptions about Ω. The strict factor structures as
in Diebold and Nerlove (1989), King, Sentana and Wadhwani (1994) and Fiorentini, Sentana and
Shephard (2004) impose Ω to be diagonal. The approximate factor structures as in Chamberlain and
Rothschild (1983) and DR (2004) relax this assumption, allowing for nonzero off-diagonal elements.
An advantage of the approximate factor representation is that it is preserved by portfolio formation,
differently from the strict factor representation. (see Chamberlain and Rothschild (1983), DR (2004)
or Fiorentini, Sentana and Shephard (2004)).
Under (1) and (2), the conditional variance of Yt+1 given the information available at time t is
given by:
Σt = V ar (Yt+1 |Jt ) = Λ Dt Λ0 + Ω.
(3)
The decomposition in (3) shows that the conditional variance of Yt+1 is time-varying, thus explaining
why model (1) and (2) is called a conditionally heteroskedastic factor model.
For simplicity, we consider a constant risk premium for all assets, i.e. we assume µ (Jt ) = µ for
all t. Following Nardari and Scruggs (2006), this restriction allows for the pricing relation µ = Λτ ,
where τ is a K × 1 vector of time-invariant factor risk premia. To simplify the exposition, we also
assume a single factor representation, i.e. we will let K = 1 throughout. The generalization to K > 1
is nevertheless straightforward. Therefore, the model above specializes to
Yt+1 = µ + λft+1 + Ut+1 ,
7
(4)
where ft+1 is the single common latent factor and λ is a N × 1 vector of factor loadings. The moment
conditions in (2) can be rewritten as
E (ft+1 |Jt ) = 0
E (Ut+1 |Jt ) = 0
E (ft+1 Ut+1 |Jt ) = 0
(5)
V ar (Ut+1 |Jt ) = Ω
V ar (ft+1 |Jt ) = σt2 ,
implying that the conditional variance of Yt+1 given Jt is equal to
Σt = λλ0 σt2 + Ω.
(6)
To model σt2 , the conditional variance of ft+1 at time t, we follow DR (2004) and assume that
ft follows a square root-stochastic autoregressive volatility (SR-SARV(1)) model with respect to the
filtration Jt (see Andersen (1994) and Meddahi and Renault (2004) for more details on this class of
models), i.e.
ft+1 = σt ηt+1
where σt2 , the conditional variance of ft+1 , satisfies the following condition:
2
E(σt2 |Jt−1 ) = ω + γσt−1
,
ω ≥ 0, γ ∈ (0, 1),
and where ηt+1 is such that E(ηt+1 |Jt ) = 0 and V ar(ηt+1 |Jt ) = 1.
Equations (4) through (5) describe the conditionally heteroskedastic model considered by DR
(2004). Our main contribution in this section is to extend this model by explicitly modeling the
skewness and the leverage effects.
3.2
The leverage effect
Fiorentini, Sentana and Shephard (2004) consider a conditionally heteroskedastic factor model that
allows for a dynamic leverage effect. Nevertheless, in their model, the leverage effect is tightly linked
to the QGARCH specification of Sentana (1995) for the conditional variance of the common factor.
Here we adopt a different approach that disentangles these two features.
Given (6), we can write the conditional variance of asset i at time t + 1 as
2
Σii,t+1 = λ2i σt+1
+ Ωii ,
i = 1, · · · , N,
where Σii,t+1 denotes the element (i, i) of the matrix Σt+1 , and similarly for Ωii .
Let ui,t+1 be the i-th component of Ut+1 . The conditional leverage effect at t + 1 can be expressed
as the conditional covariance between Yi,t+1 and Σii,t+1 , given Jt , i.e.
¡
¢
2
Cov (Yi,t+1 , Σii,t+1 |Jt ) = Cov λi ft+1 + ui,t+1 , λ2i σt+1
+ Ωii |Jt
¡
¢
¡
¢
2
2
= λ3i Cov ft+1 , σt+1
|Jt + λ2i Cov ui,t+1 , σt+1
|Jt .
(7)
Equation (7) shows that the leverage effect for each return has two components. The first component
reflects the part of the leverage effect that is due to leverage in the common factor whereas the second
component is given by the conditional covariance between the idiosyncratic shock and the future
volatility of the factor. The dynamics of each component dictate the dynamics of the leverage effect.
In this paper we assume that the idiosyncratic shock is not conditionally correlated with the
conditional variance of the factor. We formally state this assumption below.
8
2
Assumption 1 The conditional correlation between ui,t+1 and σt+1
for each asset i is null:
2
ρi,t ≡ Corr(ui,t+1 , σt+1
|Jt ) = 0,
∀i = 1, . . . , N.
2 .
This assumption is equivalent to imposing a null correlation between ui,t and ft+1
The following assumption gives a model for the leverage effect for the latent factor.
2
Assumption 2 Cov(ft+1 , σt+1
|Jt ) = π0 + π1 σt2 , for some constants π0 and π1 .
According to this assumption, the leverage effect for the factor is an affine function of its conditional
variance. As we will show next, this specification holds for many models in the class of SR-SARV
processes6 :
Example 1 Affine process7 (Dai and Singleton (2000), Singleton (2001)).
Let ft+1 be defined by
ζt+1
ft+1 = δ ζt+1 ,
p
= γ1 + γ2 ζt + α + βζt vt+1 ;
vt+1 |Jt ∼ N (0, 1),
where (α, β, δ, γ1 , γ2 ) ∈ D, a conveniently restricted set contained in R5 . It follows that
2
Cov(ft+1 , σt+1
|Jt ) = δ β σt2 = π1 σt2 ,
where σt2 = V ar (ft+1 |Jt ) . Hence, the affine process satisfies Assumption 2.
Example 2 The Quadratic GARCH (QGARCH(1,1)) of Sentana (1995).
Let ft+1 be given by
ft+1 = σt ηt+1 ,
where σt2 is such that
ηt+1 |Jt ∼ N (0, 1) ,
2
σt2 = θ + β σt−1
+ α (ft − µ)2 ,
(θ, β, α, µ) ∈ D.
It follows that
2
Cov(ft+1 , σt+1
|Jt ) = −2αµσt2 = π1 σt2 ,
showing that QGARCH(1,1)
condition for this conclusion
¢
¢ Assumption 2. Note that
¡ 3 a crucial
¡ 3satisfies
is the proportionality of E ηt+1 |Jt to 1/σt . in this case, E ηt+1 |Jt = 0.
Example 3 Heston-Nandi’s (2000) GARCH process.
Let ft+1 be given by
ft+1 = σt ηt+1 ,
ηt+1 |Jt ∼ N (0, 1) ,
where σt2 is defined as follows:
2
σt+1
= ω + β σt2 + α (ηt − γσt )2 ,
(ω, β, α, γ) ∈ D.
We can show that
2
Cov(ft+1 , σt+1
|Jt ) = −2αγσt2 = π1 σt2 ,
proving that this model also satisfies our Assumption 2.
6
Many of our examples correspond to the discrete version of continuous time models used in finance.
Backus-Foresi-Telmer(2001) use the discrete time version of the Cox-Ingersoll-Ross’s (1985) diffusion process to
propose an affine model of currency. The affine process nests the square-root process of Heston (1993) and Cox-IngersollRoss (1985).
7
9
Example 4 The Inverse Gaussian GARCH(1,1) of Christoffersen, Heston and Jacobs (2006).
In the Inverse-Gaussian-GARCH(1,1) (IV-GARCH (1,1)) model proposed by Christoffersen, Heston and Jacobs (2006) for a random process ft+1 (e.g. a log return process), ft+1 is written as the sum
of a deterministic random process and an innovation which follows an Inverse Gaussian distribution.
They show that this model is embodied in the class of SR-SARV(1) models and allows for leverage
2 |J ) = π σ 2
effect of the type considered in Assumption 2. In particular, they show that Cov(ft+1 , σt+1
t
1 t
for some π1 where σt2 is the conditional variance of ft+1 .
Given equation (7) and Assumptions 1 and 2, we can write the leverage effect for asset i as follows:
¡
¢
Cov (Yi,t+1 , Σii,t+1 |Jt ) = λ3i π0 + π1 σt2 .
(8)
3.3
The skewness effect
In this section we propose a model for the dynamics in the conditional skewness of assets returns. This
effect has often been ruled out in the conditionally heteroskedastic factor literature, which typically
0 )0 . To the best of our knowledge, we are the first to
postulates the conditional normality of (ft+1 , Ut+1
model this effect in the conditionally heteroskedastic factor literature.
The finance literature on univariate processes has modelled the skewness effect by specifying conditional distributions which allow for time varying conditional third order moments. See for instance
Hansen (1994), Harvey and Siddique (1999) and Jondeau and Rockinger (2003). Because we would like
to avoid any distributional assumptions, we will follow an alternative approach in which the skewness
effect is specified through a conditional moment condition.
Without loss of generality, assume that µ(Jt ) = µ = 0. It follows that for each i = 1, . . . , N ,
¢
¢
¡
¢
¡ 2
¢
¡
¢
¡ 3
¡ 3
ui,t+1 |Jt + 3λi E ft+1 u2i,t+1 |Jt .
|Jt + E u3i,t+1 |Jt + 3λ2i E ft+1
E Yi,t+1
|Jt = λ3i E ft+1
³
´
3
In order to obtain a simplified expression for E Yi,t+1
|Jt , we make the following assumption.
Note that DR (2004) use a similar assumption (see their Assumption 3.6).
2
Assumption 3 ft+1 and ft+1
are conditionally uncorrelated with any polynomial function of ui,t+1 of
degree smaller than three.
2
Assumption 1 assumes that ft+1
is conditionally uncorrelated with uit . Assumption 3 extends
2
Assumption 1 by requiring that ft+1
be also conditionally uncorrelated with ui,t+1 . Assumptions 1
and 3 are satisfied if the latent factor is conditionally independent of the idiosyncratic shocks.
By Assumption 3,
¢
¡
¢
¡ 2
E ft+1
ui,t+1 |Jt = E ft+1 u2i,t+1 |Jt = 0,
which implies that
¡ 3
¢
¡ 3
¢
¡
¢
E Yi,t+1
|Jt = λ3i E ft+1
|Jt + E u3i,t+1 |Jt .
(9)
As a result, specifying the dynamics of the third order conditional moments of the factor and of the
idiosyncratic shocks is equivalent to model the third order conditional moment of the excess return.
We introduce the following assumption.
Assumption 4 For all i = 1, . . . , N ,
¡
¢
E u3i,t+1 |Jt = s0i ,
10
s0i ∈ R.
Assumption 4 assumes that the third order conditional moment of ui,t+1 is time-invariant. The
idiosyncratic shocks are therefore not necessarily (conditionally) Gaussian, although we assume that
their first three moments are not time varying.
To model the conditional skewness in the conditional distribution of ft+1 , we make the following
assumption.
Assumption 5
¡ 3
¢
E ft+1
|Jt = h0 + h1 σt2 ,
h0 , h1 ∈ R.
According to Assumption 5, the conditional skewness in ft+1 is an affine function of σt2 , the
conditional variance of the factor. As we will prove in Proposition 4.4 below, this specification is
robust to temporal aggregation of the model when the leverage effect is specified by Assumption 2.
Moreover, this model has good empirical support for our data, as showed by our empirical results in
Section 2.
Assumptions 3-5 imply that
3
E(Yi,t+1
|Jt ) = λ3i h1 σt2 + si ,
(10)
with si = λ3i h0 + s0i , for all i = 1, . . . , N. Equation (10) shows that the conditional skewness of Yi,t+1
is time varying. In particular, it is an affine function of σt2 .
The specifications we propose by Assumptions 2 and 5 for ft+1 nest the standard Gaussian
GARCH(1,1) model (eventually with skewness) when ft+1 ’s standardized innovation, ηt+1 , has its
3 |J ), proportional to 1/σ . This is the case for the standard Gausthird conditional moment, E(ηt+1
t
t
sian GARCH(1,1). However the standard GARCH(1,1) model (eventually with skewness) does not
disentangle the skewness effect
from the ¢leverage.¡ Under¢ usual notations and conditions, if ft+1 is a
¡
2 |J = α E f 3 |J . This is rather a drawback for this class of
GARCH(1,1) process, Cov ft+1 , σt+1
t
t+1 t
models as pointed out by Alami and Renault (2001). Moreover, all of the usual models we introduced
in Examples 1-4 above satisfy our Assumption 5 in addition to our Assumption 2.
3.4
Our model
The following equations summarize our conditionally heteroskedastic factor model with asymmetries.
Yt+1 = µ + λft+1 + Ut+1
(11a)
E (ft+1 |Jt ) = 0
(11b)
E (Ut+1 |Jt ) = 0
(11c)
V ar (Ut+1 |Jt ) = Ω
(11d)
E (ft+1 Ut+1 |Jt ) = 0
(11e)
V ar (ft+1 |Jt ) ≡ σt2
¡ 2
¢
E σt+1
|Jt = 1 − γ + γσt2 ,
£
¤
E (Yi,t+1 − µ)3 |Jt = λ3i h1 σt2 + si ,
¡
¢
2
Cov ft+1 , σt+1
|Jt = π0 + π1 σt2 .
(11f)
γ ∈ (0, 1)
(11g)
i = 1, . . . , N
(11h)
(11i)
The skewness effect depends on the parameters h1 and si , for i = 1, . . . , N , while π0 and π1 characterize
the leverage dynamics. Equation (11g) sets the factor volatility dynamic. In the SR-SARV(1) model
we adopt for the factor, we restrict the volatility intercept ω to 1 − γ, where γ is the factor’s volatility
persistence, such that Eσt2 = Eft2 = 1. This condition identifies the factor loadings vector λ up to the
sign of each of them. This sign indeterminacy is solved, as proposed by Geweke and Zhou (1996), by
11
restricting a particular factor loading’s sign to be positive. We impose λ1 > 0. For a more extensive
discussion about this identification issue, one can refer to Geweke and Zhou (1996) and Aguilar and
West (2000).
Equations (11f) through (11i) show that the common factor drives the dynamics in the conditional
variance, the conditional skewness and the conditional leverage of assets returns. In particular, as we
showed in (8), the leverage effect for asset i can be expressed as
lii,t = λ3i lt ,
¡
¢
2 |J
where lii,t ≡ Cov (Yi,t+1 , Σii,t+1 |Jt ) denotes the leverage effect for the asset and lt ≡ Cov ft+1 , σt+1
t
denotes the leverage effect for the factor. Therefore, if an asset has a positive factor loading, its leverage
effect is positively correlated with the leverage effect for the factor. Instead, a negative relationship
holds between the two leverage effects if the factor loading is negative.
We can also define the co-leverage (or transversal leverage) between two assets i and j. This is
given by lij,t ≡ Cov (yi,t+1 , Σjj,t+1 |Jt ) and it measures the impact of a shock on the return of asset i
today on the volatility of asset j tomorrow. Under our assumptions, it follows that
¡
¢
2
lij,t ≡ Cov (yi,t+1 , Σjj,t+1 |Jt ) = Cov λi ft+1 + ui,t+1 , λ2j σt+1
+ Ωjj |Jt
¡
¢
2
= λi λ2j Cov ft+1 , σt+1
|Jt
≡ λi λ2j lt =
λ2j ¡ 3 ¢
λ lt ,
λ2i i
implying that
lij,t =
λ2j
λ2i
lii,t .
(12)
Equation (12) shows that the co-leverage of asset i on asset j has the same sign as the leverage effect
for asset i. Thus, if asset i has a negative leverage effect, a positive shock on asset i’ s return lowers
its future volatility, which increases the confidence level in asset i’s market, which ceteris paribus,
propagates to the entire financial market. Thus, a positive shock on asset i’s return reduces future
volatility for all other assets, including asset j.
4
Temporal aggregation results
Asset returns are available at many different frequencies. For instance, financial data are often available
at the daily, weekly, or monthly level, not to mention the fact that higher frequency data at the
intraday level are also increasingly available in finance. Because lower frequency returns are just a
temporal aggregation of the higher frequency returns, an internally consistent model should be robust
to temporal aggregation. Drost and Nijman (1993) show that the standard GARCH model is not
robust to temporal aggregation and propose the weak GARCH model, which is robust to temporal
aggregation. More recently, Meddahi and Renault (2004) propose the SR-SARV class of volatility
processes and show that these processes are closed under temporal aggregation. See also Engle and
Patton (2001) for a discussion of the merits of temporal aggregation.
In this section, we show that the conditionally heteroskedastic factor model with asymmetries we
propose in this paper is robust to temporal aggregation.
Suppose we observe returns at t = 1, 2, . . .. The relevant conditioning information set at time t is
Jt , which contains the past observations dated at times t and before. Suppose now we observe returns
at a lower frequency, in particular we observe returns at tm intervals, where t = 1, 2, . . ., and m is the
12
time horizon. For example, if we move from the daily to the weekly frequency, m = 5. In this case,
the relevant conditioning information set depends on the observations dated at times tm. We will call
(m)
(m)
this information set Jtm . In order to define Jtm , we need to introduce some additional notation.
Pm
(m)
In particular, following Meddahi and Renault (2004), let Ytm ≡
l=1 αl Y(t−1)m+l , t ≥ 1, denote
the process resulting from temporal aggregation of Yt over the time horizon m. The coefficients αl ,
l = 1, . . . , m, are the aggregation coefficients. For a flow variable such as a log return, αl = 1, for all
l = 1, . . . , m, whereas for a stock variable we have that αl = 1 for l = m and 0 otherwise. Similarly, let
P
Pm
(m)
(m)
Ftm ≡ m
aggregation analogues of Ft
l=1 αl F(t−1)m+l and Utm ≡
l=1 αl U(t−1)m+l be the temporal
³
´
(m)
(m)
(m)
(m)
and Ut . Following Meddahi and Renault (2004), we define Jtm ≡ σ Yτ m , Fτ m , Uτ m , Dτ m ; τ ≤ t ,
where, for any integer τ , Dτ m = V ar (Fτ m+1 |Jτ m ), Jτ m is the same information set as Jt with t = τ m
and σ(X) denotes the σ-algebra generated by X. Meddahi and Renault (2004) show that the SR(m)
SARV(1) model is robust to temporal aggregation with respect to the increasing filtration Jtm .
Proposition 4.1 Let Yt be defined by (1) and (2). Assume Yt has a constant conditional mean
(m)
µ. Then the temporally aggregated process Ytm of Yt over the time horizon m has the following
representation
(m)
(m)
(m)
Ytm = µ(m) + ΛFtm + Utm ,
(13)
such that
³
´
(m)
(m)
E U(t+1)m |Jtm
³
´
(m)
(m)
E F(t+1)m |Jtm
³
´
(m)
(m)0
(m)
E U(t+1)m F(t+1)m |Jtm
³
´
(m)
(m)
V ar U(t+1)m |Jtm
³
´
(m)
(m)
V ar F(t+1)m |Jtm
= 0
= 0
= 0
¡Pm 2 ¢
=
l=1 αl Ω
(14)
(m)
= Dtm ,
P
(m)
where Dtm is a diagonal matrix and µ(m) is a time-invariant vector equal to ( m
l=1 αl ) µ.
(m)
Proposition 4.1 shows that Ytm , the temporal aggregation of Yt over the horizon m, has the same
factor representation as Yt , where the idiosyncratic shocks and the latent factors are the temporal
aggregation analogues of the higher frequency idiosyncratic shocks and factors, respectively. Meddahi
and Renault (2004) show that the SR-SARV(1) process is robust to temporal aggregation. Hence,
if we assume that each factor, component of Ft , follows a SR-SARV(1) model, as in our model in
(11) for the single factor, the results in Meddahi and Renault (2004) imply that each component of
(m)
Ftm inherits the SR-SARV(1) dynamics. We can therefore conclude that under our assumptions the
volatility specification assumed for the factor representation of Yt in our model in (11) is robust to
temporal aggregation.
Next we study the properties of temporal aggregation of the models assumed for the leverage and
skewness effects (Assumptions 2 and 5, respectively). For simplicity we assume a single factor model
and let µ = 0.
The following proposition is auxiliary in proving the robustness of the skewness and leverage
models to temporal aggregation. It provides some useful properties of the SR-SARV(1) process not yet
established in the literature. In particular, this proposition gives the expected value of the conditional
variance conditional on the information available at any earlier period, and it also expresses the
conditional variance of an aggregated SR-SARV(1) process in terms of the conditional variance of the
original process.
13
Proposition 4.2 Let ft+1 follow a SR-SARV(1) model with volatility persistence and intercept parameter γ and 1 − γ, respectively and with conditional variance σt2 . Then, for all l ≥ 1, we have
that
2
2
E(σtm+l−1
|Jtm ) = 1 − γ l−1 + γ l−1 σtm
,
and
(m)2
σtm
≡V
(m)
(m)
ar(f(t+1)m |Jtm )
=
m
X
αl2
m
³
´
X
(m)
(m) 2
l−1
2
1−γ
+ σtm
αl2 γ l−1 ≡ S1 + S2 σtm
.
l=1
l=1
(m)
The leverage effect in the aggregated return Yi,tm of asset i is defined as
´
³
(m)
(m)2
(m)
Cov Yi,(t+1)m , σi,(t+1)m |Jtm ,
³
´
(m)2
(m)
(m)
where σi,tm ≡ V ar Yi,(t+1)m |Jtm .
Given Assumption 1, it suffices to examine the leverage effect in the factor
³
´
(m)
(m)2
(m)
Cov f(t+1)m , σ(t+1)m |Jtm .
Proposition 4.3 Let ft+1 follow a SR-SARV(1) model with volatility persistence and intercept parameter γ and 1 − γ, respectively and satisfy Assumptions 2. It follows that
´
³
(m)
(m)
(m) (m)2
(m)
(m)
(m)2
(m)
π0 and π1 ∈ R.
Cov f(t+1)m , σ(t+1)m |Jtm = π0 + π1 σtm ;
Proposition 4.3 shows that the leverage model assumed in Assumption 2 is robust to temporal
aggregation for the class of SR-SARV(1) processes. Similarly, we can show that the equation (12)
describing the co-leverage effect for asset i on asset j holds for the aggregated process provided Assumption 1 is satisfied.
The next result establishes the robustness to temporal aggregation of the third order conditional
moment dynamics assumed in Assumption 5.
Proposition 4.4 Let ft+1 follow a SR-SARV(1) model with volatility persistence and intercept parameter γ and 1 − γ, respectively and satisfy Assumptions 2 and 5. It follows that
·³
¸
´3
(m)
(m)
(m) (m)2
(m)
E f(t+1)m |Jtm = h1 σtm + h0 ,
and
·³
E
´3
(m)
(m)
Yi,(t+1)m |Jtm
for i = 1, . . . , N and t = 1, 2, . . ., where
m
X
(m)
h1 = h1
αl3 γ l−1 + 3π1 ×
A(m)
(m)
(m)
0
αl αl20 γ l −2 /S2
(m)
,
,
(m) (m)
Ã
(m)
= λ3i h0
+ s0i
m
X
h
i
0
αl αl20 γ l −l−1 π0 + π1 (1 − γ l−1 ) ,
l<l0 ; l,l0 =1
!
αl3
m
X
,
l=1
and where S1
(m)
+ si
m
X
= A(m) − h1 S1 ,
m
X
=
αl3 [h0 + (1 − γ l−1 )h1 ] + 3 ×
l=1
si
(m) (m)2
= λ3i h1 σtm
l<l0 ; l,l0 =1
l=1
(m)
h0
¸
(m)
and S2
are as defined in Proposition 4.2.
14
Proposition 4.4 shows that the conditional third moment dynamic postulated in Assumption 5 is
robust to temporal aggregation in the set of SR-SARV(1) processes that have a conditional leverage
dynamic according to Assumption 2. In particular, the third conditional moments of excess aggregated returns follow an affine function of volatility. Moreover, if the conditional third moment of the
underlying factor is time varying, it follows that the aggregated factor also has a dynamic conditional
third moment given that the aggregation coefficients αl , l = 1, . . . , m are nonnegative.
We can summarize the temporal aggregation properties of the temporally aggregated model as
follows. First, the factor representation is preserved for the aggregated model, with the same factor
loadings. Second, the aggregated factor has a leverage effect and a skewness effect whose specifications
are affine functions of its volatility, just as assumed for the original factor itself. Third, the conditional
skewness of the idiosyncratic shocks is constant if the same is true for the underlying non aggregated
shocks, as assumed by Assumption 1. These properties, together with the property of robustness to
temporal aggregation of SR-SARV models for conditional heteroskedasticiy established by Meddahi
and Renault (2004), prove that our conditionally heteroskedastic factor model with asymmetries is
robust to temporal aggregation.
5
Generalized Method of Moments-based inference for the model
The main goal of this section is to present some valid moment conditions that characterize our model
and on which we can base GMM inference. The GMM-based inference is robust to distribution misspecification and also easier to perform than alternative methods often used in the conditionally heteroskedastic factor model literature which widely rely on distributional assumption. To the best of our
knowledge, DR (2004) are the first to propose GMM-based inference for conditionally heteroskedastic
factor model.
Our model, as we mentioned, is close to the DR (2004) model and both share (11a)-(11g). Therefore, the DR (2004) moment conditions are useful here to identify λ, γ and Ω. However, in the
conditionally heteroskedastic latent factor model, as pointed out by DR (2004), the factor is not observable, therefore, it is impossible to set moment conditions only based on mean and variance to
characterize these parameters without additional restrictions. They propose two approaches. The
first calibrates one factor loading and thus allows the identification of the whole model by appropriate moment conditions. The second approach restricts the factor’s conditional kurtosis to be time
invariant and propose a dynamic for the conditional variance of the factor’s conditional variance. This
allows the full identification of the model through suitable moment conditions.
5.1
Inference by calibration
This approach sets the factor loading of a given excess return process where we will look for one with
a factor loading different from 0 (e.g. Y1,t ) to an arbitrary value λ: 0 < λ2 < V ar(Y1,t ). The following
moment conditions proposed by DR (2004) characterize λ−1 = (λ2 , · · · , λN ), γ and Ω (we assume
without loss of generality that µ = 0):
V ecE
£¡
¢ 0
¤
£
¤
Y−1,t+1 − λ−1 λ−1 Y1,t+1 Yt+1
|Jt = V ec Ω2. − λ−1 λ−1 Ω1.
¯
£
£
¢
0 ¯
V echE (1 − γL)Yt+1 Yt+1
Jt−1 ] = V ech (1 − γ)(λλ0 + Ω ]
(15a)
(15b)
where L is the usual lag operator, Ω1. is the 1×N-matrix equal to the first row of Ω, Ω2. is the N-1×Nmatrix of the last N-1 rows of Ω while V ec and V ech are the usual vectorizing and half-vectorizing
operators.
15
In practice, instead of (15a), we can use
¢
¤
£
¤
£¡
V ecE Y−1,t+1 − λ−1 λ−1 Y1,t+1 Y1,t+1 |Jt = V ec Ω2:N,1 − λ−1 λ−1 Ω11 ,
where Ω2:N,1 is the submatrix of Ω defined by its first column and its second to its last rows, to avoid
the risk of near collinearity in the resulting unconditional moment conditions. Instead of the Vech
operator in (15b), the Diag operator is recommended where large dimension processes are used. The
Diag operator transforms a square matrix into a vector of its diagonal entries.
The leverage in excess returns as given £by ¡(8) provides
conditions characterizing π0 and
¢ moment
¤
2
2
π1 . With Σii,t = E(Yi,t+1
|Jt ) and σt2 = λ−2 E Y1,t+1
|Jt − Ω11 , these moment conditions are:
¡
¢
£
¡ 2
¢¤
2
E Yi,t+1 Yi,t+2
|Jt = λ3i π00 + π10 E Y1,t+1
|Jt ,
∀i = 1, · · · , N
(16)
where π00 = π0 − π1 (Ω11 /λ2 ) and π10 = π1 /λ2 .
Similarly, the third conditional moment of asset excess returns as given by (10) characterizes the
skewness parameters h1 , s1 , · · · , sN :
¡ 3
¢
¡ 2
¢
E Yi,t+1
|Jt = λ3i h01 E Y1,t+1
|Jt + s1i ,
∀i = 1, · · · , N
(17)
where h01 = h1 λ−2 and s1i = si − h1 λ3i λ−2 Ω11 .
In a more general case where µ 6= 0, one can note that the moment condition E(Yt+1 |Jt ) = µ
identifies µ and therefore has to be completed in (15). Moreover Yt+1 , Y−1,t+1 and Y1,t+1 have to be
replaced by Yt+1 − µ, Y−1,t+1 − µ−1 and Y1,t+1 − µ1 , respectively.
The moment conditions in Equations (16)-(17) can be written as:
E (gφ1 (Yt+1 , Yt+2 , φ2 |Jt )) = 0
with φ1 = (λ0−1 , γ, V ech(Ω)0 )0 and φ2 = (π0 , π1 , s1 , · · · , sN , h1 ). For a Jt -measurable vector of instruments zt including 1, this conditional moment condition implies:
Ezt ⊗ gφ1 (Yt+1 , Yt+2 , φ2 ) = 0
(18)
which, in turn, is an unconditional moment condition allowing for the application of Hansen’s (1982) results. The following proposition suggests an instrument that could validate the application of Hansen’s
(1982) results.
Proposition ¡5.1 Let¢ zt be an I-vector of Jt -measurable instruments including 1 and z1,t (I ≥ 2)
such that Cov z1,t , σt2 6= 0. Then, for any φ1 , the moment condition in (18) identifies φ2 at the first
order i.-e.:
(∂/∂φ02 ) [Ezt ⊗ gφ1 (Yt+1 , Yt+2 , φ2 )] has full column rank.
The factor (ft+1 ) follows an SR-SARV(1) model and therefore its square has an ARMA represen2 also has an ARMA representation as the
tation (Meddahi and Renault (2004)). Because λ 6= 0, Y1,t
2 is correlated with σ 2 . Consequently, any lag of Y 2 is a valid instrument that
factor square. Thus, Y1,t
t
1,t
may help to first-order identify φ2 by (18).
On the other hand, since the moment conditions in (15) identify φ1 at the first order (see DR
(2004)) and do not share any component of φ2 , we can show that, jointly, the moment conditions in
(15) and (18) identify φ = (φ01 , φ02 )0 at the first order. By joining (15) and (18), the global moment
condition is written:
Egt (φ) = 0.
16
(19)
Let kXk2 = X 0 X where X is a vector. If Ekgt (φ)k2 < ∞ (which involves a finite sixth moment of
Yt ), Hansen (1982) applies and, with φ̂ being the efficient GMM estimator of φ based on this moment
condition:
√
¡
¢
d
T (φ̂ − φ) → N 0, (D0 W −1 D)−1
√
P
where W = limT →∞ V ar Tt=1 gt (φ)/ T and D = (∂/∂φ0 )Egt (φ).
5.2
Inference through higher order moments
The second approach proposed by DR (2004) completes their model given by Equations (11a)-(11g)
by using a dynamic specification for the conditional variance of the factor’s conditional variance. With
the additional constant conditional kurtosis assumption for the factor, DR (2004) propose moment
conditions that identify λ, γ and Ω.
2
They assume that the conditional variance of σt+1
is a quadratic function of σt2 :
¡ 2
¢
V ar σt+1
|Jt = α + βσt2 + δσt4 .
(20)
This specification embodies affine process of conditional variance as considered by Heston (1993) and
also the Ornstein-Uhlenbeck like Levy-process of conditional variance as introduced by BarndorffNielsen and Shephard (2001).
In our temporal aggregation robust framework, if we complete our conditionally heteroskedastic
factor model with asymmetries in (11) with the conditional variance specification in (20) for the factor,
it turns out that the whole framework is modified and must re-evaluate the temporal aggregation
property of this new model. The following proposition insures that the conditional variance dynamic in
(20) is robust to temporal aggregation in the class of the SR-SARV(1) processes. As a consequence, the
new model we obtain by completing our model in (11) by (20) is also robust to temporal aggregation.
Proposition 5.2 Let (ft+1 ) follow a SR-SARV(1) model with volatility persistence and intercept
parameters γ and 1 − γ, respectively and σt2 = V ar(ft+1 |Jt ). If there exist α, β and γ ∈ R such that:
2
V ar(σt+1
|Jt ) = α + β σt2 + δ σt4
Then, for all l ≥ 2, there exist H1l , H2l and H3l ∈ R such that
2
V ar(σt+l−1
|Jt ) = H1l + H2l σt2 + H3l σt4 .
Proposition 5.2 shows how the conditional variance (conditionally on earlier information) of the
conditional variance of a SR-SARV(1) process is expressed in terms of the past conditional variance
if this SR-SARV(1) process has a quadratic variance of variance. Since the quadratic specification is
preserved in this basic temporal aggregation frame, it is also preserved, in a more general temporal
aggregation frame as the one we studied in the previous section. The following moment conditions
identify λ, Ω, γ, a, b and c at the first order:
£¡
¢ 0
¤
£
¤
−1
V ecE Y−1,t+1 − λ−1 λ−1
(21a)
1 Y1,t+1 Yt+1 |Jt = V ec Ω2. − λ−1 λ1 Ω1.
¯
£
£
¤
0 ¯
0
V echE (1 − γL)Yt+1 Yt+1 Jt−1 ] = V ech (1 − γ)(λλ + Ω)
(21b)
¯
£
4
2
2 2 ¯
E (1 − cL)(y1,t+1 − 6Ω11 y1,t ) − bλ1 y1,t Jt−1 ] = a
(21c)
where λ−1 and Y−1,t have the same definition as in (15) and we also assume µ = 0.
In addition, by putting all these parameters in a vector φ1 , the conclusion of the Proposition 5.1
is still valid. However, the conditions needed for an asymptotic normal distribution of the efficient
17
GMM estimator φ̂ are more stringent and include finite eighth moments for Yt which may not be
realistic for GARCH processes with high volatility persistence. For this reason, the previous approach
for identification seems more practical.
Before leaving this identification discussion, some remarks are noteworthy. First, the number of
parameters can grow very quickly with the number of assets in the factor structure depending on the
restrictions on the idiosyncratic shock’s variance matrix Ω. Typically, without any restriction on Ω,
the number of parameters is of order O(N2 ) against O(N) if we restrict this variance matrix making
it diagonal. Thus, a free semi positive definite matrix Ω is practically tractable only in the case of
a reasonable number of assets (e.g. N≤ 5). But, for a larger number of assets, it would be more
convenient to restrict Ω making it diagonal or even block diagonal.
Second, the moment condition based inference method, the so-called Iterated GMM proposed by
Ogaki (1993), is also reliable for our framework. The Iterated GMM may consist here on estimating φ1
from (15) or (21) by the usual GMM technique and plugging φ̂1 in the remaining moment condition
and then estimating φ2 also by using the usual GMM procedure. It has been proved (See Ogaki
1993) that the resulting estimate (φ̂01 , φ̂02 )0 is asymptotically normally distributed. Even though this
approach involves more optimization problems than the usual GMM, the dimension of the parameter
spaces on which these optimizations are performed are smaller than in the usual GMM. Therefore,
this technique may be easier to implement. However, due to its two-step approach, the Iterated GMM
is less efficient than the usual GMM.
6
Monte Carlo experiments
The main goal of this section is to assess the finite sample performance of our estimation procedure for
different values of the factor volatility persistence. Because the GMM inference results are known to be
sensitive to the set of valid instruments that are used (see e.g. Andersen and Sørensen (1996)), we first
investigate the relative performance of 4 sets of valid instruments. We evaluate the performance of each
instrument set by the simulated bias and the root mean square error (RMSE) of parameter estimates
it provides for both the DR (2004) model and our conditionally heteroskedastic factor model with
asymmetries. The best of these instrument sets is subsequently used in our experiments for assessing
our inference procedure’s sensitivity to the factor’s volatility persistence.
In all our Monte Carlo experiments, we simulate trivariate samples of 3 asset excess returns with
null risk premia (µ = 0) from a single factor model. The model considered is the following:
Yi,t = λft + ui,t
(i = 1, 2, 3)
with λ = (1, 1, 1)0 and Ut ∼ i.i.d.N (0, ωI3 ); ω = .5 and I3 is the identity matrix of size 3. ui,t is the
i-th component of Ut . ft is a standard Gaussian GARCH process i.e. ft = σt−1 ηt , ηt ∼ i.i.d.N (0, 1)
2 ; 0 < α + β < 1. This GARCH(1,1) process is an SR-SARV(1)
and σt2 = 1 − α − β + αft2 + βσt−1
process with persistence γ = α + β.
The three experiments we conduct differ by the factor volatility persistence γ:
Experiment 1: α = .20, β = .60; γ = .80;
Experiment 2: α = .20, β = .70; γ = .90;
Experiment 3: α = .20, β = .75; γ = .95.
γ = .80 matches approximately the factor’s volatility persistence estimate by Fiorentini, Sentana and
Shephard (2004) for monthly U.K. index excess returns. γ = .90 and γ = .95 are the usual range of
the standard GARCH volatility persistence estimate in the empirical literature for daily returns (see
e.g. Harvey and Siddique (1999)). We set the number of replications to 400, and the sample size is
T = 5, 000 which roughly matches the length of the data set used in our empirical application.
18
We make inference by the calibration approach we describe in Section 5 and we set the first asset
factor loading to λ = 1. We estimate the DR (2004) model by the moment conditions given in
Equation (15) and our conditionally heteroskedastic factor model with asymmetries (CHFA) by the
moment conditions given by Equations (15)-(16)-(17). The parameters of interest in DR (2004) model
are λ2 , λ3 , ω and γ. In our Monte Carlo experiments, s1 = s2 = s3 = s = 0, h1 = 0 and π0 = π1 = 0.
Therefore, as far as the Monte Carlo designs are concerned, λ2 , λ3 , ω, γ, s, h1 , π0 and π1 are the only
relevant parameters of our conditionally heteroskedastic factor model with asymmetries (CHFA).
The valid instrument sets that we select forP
our study about relative finite sample performance
i 2
2
2
2
of instruments are: z1,t = (1, Y1,t ), z2,t = (1, 20
i=1 ρ Y1,t−i+1 ; ρ = .9), z3,t = (1, Y1,t , Y1,t−1 ) and
2
2
2
z4,t = (1, Y1,t , Y1,t−1 , Y1,t−2 ). We use each of these instrument sets to fit simulated data from our
Experiment 1 pattern.
Table V in Appendix B presents the results for this investigation. The factor loadings λ2 and λ3
and the idiosyncratic shocks volatility ω exhibit bias and root mean square (RMSE) which are of the
same range for all of the instrument sets and for both models. In contrast, the volatility persistence
(γ) estimate distinguishes these instrument sets. z2,t yields the largest of bias and RMSE for both
models followed by z1,t . Even though z3,t and z4,t seem to provide the same performance, z4,t is slightly
better due to the smaller bias that it yields. This ranking is also valid for the other parameters that
appear only in the CHFA model with z4,t being the best set of instruments among those we consider
in term of bias and RMSE for both models. This result suggests the use of z4,t as instrument set for
both our next experiment and our empirical work.
Table VI in Appendix B presents the results for our next Monte Carlo experiment. This Monte
Carlo experiment assesses our estimation procedure’s finite sample performance for several values
for the volatility persistence through Experiment 1, 2 and 3. The factor loadings λ2 and λ3 and
the idiosyncratic shocks variance ω exhibit small bias and RMSE of the same range in our different
patterns. But the estimated γ shows a negative bias which increases with the true value for γ while its
RMSE decreases. Among the CHFA model specific parameters, only s has a decreasing bias with the
true value of γ while h1 , π0 and π1 have increasing biases. The larger bias are observed for Experiment
3 where γ = .95. We also notice an increasing RMSE for all these specific parameters; the worst RMSE
occurring with γ = .95 in Experiment 3.
This Monte Carlo experiment suggests that our inference procedure is reliable particularly for
volatility persistence which are not close to 1 for both models, whereas the inference could be inaccurate
for persistence values larger than .95. This observation seems to confirm a well known drawback of
the GMM method application in volatility literature which delivers bad results when the volatility
persistence is close to 1 (see e.g. Broto and Ruiz (2004)).
7
Application to daily U.K. stock market excess returns
In our empirical work, we estimate both the conditionally heteroskedastic factor model proposed by
DR (2004) and our conditionally heteroskedastic factor model with asymmetries (CHFA) for stock
excess returns on 24 U.K. sectors. We use all the series described in Data Appendix (see Appendix
B) except the FTSE All Share Ex. Inv. Trusts index excess return because it exhibits a correlation of
.99 with the FTSE 350 index excess return (see Table 1 Appendix B) which is included in the models.
In both models, following Nardari and Scruggs (2006), we restrict µ = λτ ; where λ is the factor
loadings vector and τ is interpreted as the price of the systematic risk. The FTSE 350 index excess
return plays the role of Y1,t and we use z4,t as valid instrument set (see Section 5). The DR (2004)
model has 49 parameters while the CHFA model has 76 parameters.
19
7.1
Results
Tables VII in Appendix B presents our estimation results. The price of risk τ with a t-stat of .373
and .006 for the DR (2004) model and our CHFA model respectively is not significant. This is in line
with the result by Harvey and Siddique (1999) in an univariate framework for the daily returns on
both S&P 500 and Nikkei 225 indices. The noncentral-t model they consider for these indices does not
yield a significant mean equation. Even though the factor loadings and idiosyncratic shocks’ variance
estimates by both models are different for most of the excess returns, their average difference across
the returns are .0012 and .0040 for the factor loadings and the idiosyncratic shocks, respectively.
The factor volatility persistence estimates for the two models we consider are .685 for the DR
(2004) model and .684 for our CHFA model. Two remarks are noteworthy: first, our specifications
for asymmetries do not seem to change the persistence estimate. Second, the persistence we find is
low with respect to what is found in empirical literature for daily data. Engle and Ng (1993) found a
volatility persistence of .916 in a standard GARCH(1,1) model for the daily return of the TOPIX index
and both Harvey, Ruiz and Sentana (1992) and Fiorentini, Sentana and Shephard (2004) found about
.80 for the volatility persistence in their QGARCH(1,1) factor model for monthly U.K. stock market
index returns; the volatility of monthly returns is known to be less persistent than the volatility of
daily returns. The main difference between these models we quote and the models we estimate in this
paper is the way in which they treat conditional skewness. The first models rule out the conditional
skewness in the data while the latter are consistent with this empirical fact. Our data seem to confirm
the findings by Harvey and Siddique (1999) who observe that skewness inclusion impacts persistence in
conditional variance. Our findings also suggest that not being consistent with presence of conditional
skewness could alter inference about conditional variance persistence.
The leverage effect parameters in the CHFA model π0 and π1 are both significant implying that
the leverage effect in our data is dynamic and can be captured by the common factor’s dynamic. Our
findings confirm, for daily data, the result by Sentana (1995) for monthly U.K. index excess returns,
namely that there is significant leverage effect in sectorial returns through a common factor. We also
are in line with Black (1976) and Nelson (1991). The slope h1 of the factor’s third conditional moment
is significant and negative (-6.36). This confirms a dynamic conditional skewness in our series as
Harvey and Siddique (1999, 2000) and Jondeau and Rockinger (2003) have also found for their data.
Moreover, due to the positive estimates we get for our series’ factor loadings, the negativity of h1
implies that periods of high volatility are followed by high negative conditional third moment. Hence,
a larger volatility seems to announce more negatively skewed conditional distribution for the returns
series that we consider.
7.2
Diagnostic tests
We propose an extended Kalman filter to filter simultanously the latent factor and the conditional
variance processes using the GMM estimates of either the DR (2004) model or our CHFA model (see
Appendix A). This algorithm circumvents the GMM procedure drawback which does not carry out
an estimate for the factor process nor for the conditional variance process. This filter allows us to
perform some useful diagnostic tests.
Figure 2 shows the QQ plot of the filtered latent factor using the DR (2004) model parameters
estimates. This filtered factor is multiplied by the FTSE 350 factor loading λ=.35 to allow for direct
comparison with the FTSE 350 QQ plot showed in Figure 1. This factor shows the same fat tail
and asymmetry behavior as the FTSE 350 and thus validates the choice of an asymmetric factor
representation in our CHFA model. The correlation with the FTSE 350 index excess return of the
factor processes extracted with the DR (2004) model estimates and the CHFA model estimates are
.922 and .897, respectively (see Table VIII). These correlations have the same order of magnitude
20
as the correlations obtained by Sentana (1995) for both the QGARCH(1,1) latent factor and the
GARCH(1,1) latent factor with the FTA 500 monthly index excess return (.984 for both).
Figure 2: Q-Q plot of the filtered factor from DR (2004) model’s estimates (scaled by λ = .35)
3
2
Filtered Factor Quantiles
1
0
−1
−2
−3
−4
−5
−6
−4
−3
−2
−1
0
1
Standard Normal Quantiles
2
3
4
Figure 3: Daily FTSE 350 index excess return and filtered standard deviations by the DR (2004)
model and the CHFA model’s estimates
Daily FTSE350 Index Excess Return (%)
2
0
−2
−4
−6
1987
1990
1992
1995
1997
2000
2002
2005
Filtered Conditional Standard Deviation from DR Model estimates
10
5
0
1987
1990
1992
1995
1997
2000
2002
2005
Filtered Conditional Standard Deviation from CHFA Model estimates
10
5
0
1987
1990
1992
1995
21
1997
2000
2002
2005
Figure 3 shows the FTSE 350 index excess returns and the filtered standard deviations processes
with the DR (2004) model estimates and our CHFA model estimates respectively. The volatility
processes seem to adequately follow the returns series in the sense that periods of large variations in
returns correspond to periods of large volatility. However, for extreme variation in returns, our CHFA
model seems to predict larger volatility than the DR (2004) model. This is the case with the October
1987 financial crisis. For the purpose of comparison, Figure 4 shows the filtered standard deviation
from both models’ estimates and the FTSE 350 index excess returns for a one year period around
October 1987; specifically, from April 1, 1987 through April 30, 1988. When the market is smooth,
the two models predict roughly the same level of volatility. In contrary, in the periods of large shocks,
the CHFA model seems to predict larger volatility. Yet, our model may be more realistic. Between
October 20, 1987 and November 30, 1987, the FTSE 350 index excess return rises by 63.21% while
the in-sample forecasted standard deviation drops by 20.62% for the DR (2004) model and 50.77% for
our CHFA model.
Figure 4: Filtered standard deviations by the DR (2004) model’s and the CHFA model’s estimates
and the FTSE 350 index excess return. April 1, 1987 through April 30, 1988
12
Filt. Cond. Sd. D. (CHFA)
Filt. Cond. Sd. D. (DR)
FTSE 350 Exc. return
10
8
6
4
2
0
−2
−4
−6
Apr87
Jul87
Oct87
Jan88
Apr88
We also obtain two estimates for the FTSE 350 idiosyncratic shocks processes. One is obtained
by the filtered factor from the DR (2004) model estimates (udr,t+1 ) and the second is from our CHFA
model (uchf a,t+1 ). Table IX shows a non significant skewness for both processes. The skewness in
uchf a,t+1 is even less significant. This also validates the choice of asymmetric factor in our model. The
results of the Engle’s Lagrange multiplier test for heteroskedasticity are not clear. Even though the
evidence of heteroskedasticity is not strong for these idiosyncratic shock processes, homoskedasticity
is hardly accepted at 1% level for udr,t+1 and at .1% for uchf a,t+1 . This may suggest the inclusion of
an additional factor for heteroskedasticity and paves the way for future work.
22
8
Conclusion
In this paper, we extend the existing class of conditionally heteroskedastic factor model by specifying the skewness and leverage effects dynamic in return processes. We show that our conditionally
heteroskedastic factor model with asymmetries is robust to temporal aggregation. In addition, our
specifications are robust to any dynamic in the conditional kurtosis or even higher moments. We
also provide moment conditions allowing for GMM inference. We propose an extended Kalman filter
algorithm that filters the latent factor and the volatility processes simultaneously. Moreover, the conditional third moment specification can serve in asset pricing framework with higher order conditional
moments in the pricing equation. Our empirical application involves 24 index excess returns from
U.K. stock market and confirms some useful results in the volatility model literature. Typically, our
data confirm Harvey and Siddique (1999, 2000) and Jondeau and Rockinger (2003) for the conditionally heteroskedastic factor model framework. We find a lower volatility persistence for our common
factor than what is obtained commonly for daily data in models that rule out the skewness effect.
Our findings also confirm, for daily data, the result by Sentana (1995) for monthly U.K. index excess
returns, namely that there is significant leverage effect in sectorial returns through a common factor.
This work also helps to learn more about the relationship between asset returns’ third conditional
moment and their volatility in presence of leverage effect. Our empirical application suggests that it
may be beneficial to incorporate this relation for efficiency gain purpose. The filtered volatility process
by CHFA model estimates seems more realistic in period of large shocks than the filtered volatility
from the DR (2004) model estimates. Furthermore, this empirical application also suggests that larger
volatility announces more negatively skewed conditional distribution for the returns series.
On the other hand, it is worth noting that the dynamics we postulate for the factor’s conditional variance, leverage and third moment are all compatible with the univariate Inverse Gaussian
GARCH(1,1) model proposed by Christoffersen, Heston and Jacobs (2006) for asset return. For that
reason, an Inverse Gaussian GARCH(1,1) factor model could be a suitable parametric counterpart
for our conditionally heteroskedastic factor model with asymmetries of which investigation is left for
future research.
Another possible extension of this work that we plan for future work is its extension to more
than one factor. Even though a multi factor extension is straightforward, estimation and inference
are fundamental issues which need to be discussed carefully. This extension to more than one heteroskedastic factor is in particular motivated by the residual heteroskedasticity that may exists in the
fitted idiosyncratic shock process from our data.
23
References
Aguilar, J. and Zhou, G. (2000). Measuring the pricing error of the arbitrage pricing theory. Review
of Financial Studies, 9:557–587.
Alami, A. and Renault, E. Risque de modèle de volatilité. Working Paper. CIRANO.
Andersen, T. G. (1994). Stochastic autoregressive volatility: A framework for volatility modeling.
Mathematical Finance, 4:75–102.
Andersen, T. G. and Sørensen, B. E. (1996). gmm estimation of a stochastic volatility model: A
monte carlo study. Journal of Business and Economic Statistics, 14:328–352.
Ang, A. and Chen, J. (2002). Asymmetric correlation of equity portfolios. Journal of Financial
Economics, 63:443–494.
Backus, D., Foresi, S., and Telmer, C. (2001). Affine models of currency pricing: Accounting for
the forward premium anomaly. Journal of Finance, 56:279–304.
Bai, J. and Ng, S. (2005). Tests for skewness, kurtosis, and normality for time series data. Journal
of Business and Economic Statistics, 23:49–61.
Barndorff-Nielsen, O. E. and Shephard, N. (2001). Non-gaussian Ornstein-Uhlenbeck-based
models and some of their uses in financial economics. J. R. Statist. Soc. B, 63:167–241.
Barone-Adesi, G. (1985). Arbitrage equilibrium with skewed asset returns. Journal of Financial
and Quantitative Analysis, 20:299–313.
Black, F. (1976). Studies of stock market volatility changes. 1976 Proceedings of the American
Statistical Association, Business and Economic Statistics Section, pages 177–181.
Bollerslev, T. (1990). Modelling the coherence in short-run nominal exchange rates: A multivariate
generalized arch appraoch. Review of Economic Studies, 72:498–505.
Bollerslev, T. and Zhou, H. (2006). Volatility puzzles: A unified framework for gauging returnvolatility regressions. Journal of Econometrics, 131:123–150.
Broto, C. and Ruiz, E. (2004). Estimation methods for stochastic volatility models: A survey.
Journal of Economic Surveys, 18:613–649.
Campbell, J. Y., Lo, A. W., and MacKinlay, A. C. (1997). The Econometrics of Financial Markets.
Princeton University Press.
Chamberlain, G. and Rothschild, M. (1983). Arbitrage, factor structure and mean-variance analysis in large asset markets. Econometrica, 53:1305–1324.
christoffersen, P., Heston, S., and Jacobs, K. (2006). Option valuation with conditional skewness. Journal of Econometrics, 131:253–284.
Cox, J. C., J. E. Ingersoll, J., and Ross, S. A. (1985). A theory of term structure of interest rates.
Econometrica, 53-2:385–408.
Dai, Q. and Singleton, K. (2000). Specification analysis of affine term structure models. Journal of
Finance, 55:1943–1978.
24
Diebold, F. and Nerlove, M. (1989). The dynamics of exchange rate volatility: A multivariate
latent factor arch model. Journal of Applied Econometrics, 4:1–21.
Doz, C. and Renault, E. (2004). Conditionally heteroskedastic factor models: Identification and
instrumental variables estimation. Working Paper. CIRANO.
Drost, F. C. and Nijman, T. E. (1993). Temporal aggregation of garch processes. Econometrica,
61:909–927.
Duffie, D., Pan, J., and Singleton, K. (2000). Transform analysis and asset pricing for affine
jump-diffusions. Econometrica, 68-6:1343–1376.
Duffie, D. and Singleton, K. (1997). An econometric model of the term structure of interest-rate
swap yields. Journal of Finance, 52-4:1287–1321.
Engle, R. F. (1982). Autoregressive conditional heteroscedasticity with estimates of variance of
United Kingdom inflation. Econometrica, 50:987–1007.
Engle, R. F. and Kroner, F. K. (1995). Multivariate simultaneous generalized arch. Econometric
Theory, 11:122–150.
Engle, R. F. and Patton, A. J. (2001). What good is a volatility model? Quantitative Finance,
1:237–245.
Eraker, B. (2004). Do stock prices and volatility jump? reconciling evidence from spot and option
prices. Journal of Finance, 59-3:1367–1403.
Fiorentini, G., Sentana, E., and Shephard, N. (2004). Likelihood-based estimation of generalised
arch structures. Econometrica, 72:1481–1517.
Geweke, O. and West, M. (2000). Bayesian dynamic factor models and variance matrix discounting
for portfolio allocation. Journal of Business and Economic Statistics, 18:338–357.
Glosten, L. R., Jaganathan, R., and Runkle, D. E. (1993). On the relation between the expected
value and the volatility of the nominal excess return on shocks. Journal of Finance, 48:1779–1801.
Hansen, B. E. (1994). Autoregressive conditional density estimation. International Economic Review,
35:705–730.
Hansen, L. P. (1982). Large properties of generalized method of moments estimators. Econometrica,
50:1029–1054.
Harvey, A. C. and Shephard, N. (1996). The estimation of an asymmetric stochastic volatility
model for asset returns. Journal of Business and Economic Statistics, 14:429–434.
Harvey, C. R. and Siddique, A. (1999). Autoregressive conditional skewness. Journal of Financial
and Quantitative Analysis, 34:465–487.
Harvey, C. R. and Siddique, A. (2000). Conditional skewness in asset pricing tests. Journal of
Finance, 55:1263–1295.
Hayashi, F. (2000). Econometrics. Princeton University Press.
Henry, O. (1998). Modelling the the asymmetry of stock market volatility. Applied Financial Economics, 8:145–153.
25
Heston, S. L. (1993). A closed-form solution for options with stochastic volatility with applications
to bond and currency options. Review of Financial Studies, 6-2:327–343.
Heston, S. L. and Nandi, S. (2000). A closed-form garch option pricing model. Review of Financial
Studies, 13-3:585–625.
Hull, J. and White, A. (1987). The pricing of options on assets with stochastic volatilities. Journal
of Finance, 42-2:281–300.
Jondeau, E. and Rockinger, M. (2003). Conditional volatility, skewness, and kurtosis: Existence,
persistence, and comovements. Journal of Economic Dynamics and Control, 27:1699–1737.
Kalimipalli, M. and Sivakumar, R. (2003). Does skewness matter? evidence from index options
market. Working Paper. University of Waterloo.
Kim, S., Shephard, N., and Chib, S. (1998). Stochastic volatility: Likelihood inference and comparison with arch models. 45:361–393.
King, M. A., Sentana, E., and Wadhwani, S. B. (1994). Volatility and links between national stock
markets. Econometrica, 62:901–933.
Kraus, A. and Litzenberger, R. (1976). Skewness preference and valuation of risk assets. Journal
of Finance, 31:1085–1100.
Kroner, K. F. and Ng, V. K. (1998). Modelling asymmetric comovements of asset returns. Review
of Financial Studies, 11:817–844.
Mandelbrot, B. (1963). The variation of certain speculative prices. Journal of Business, 36:394–419.
Meddahi, N. and Renault, E. (1997). Aggregations and marginalization of garch and stochastic
volatility models. Working Paper. Université de Montréal.
Meddahi, N. and Renault, E. (2004). Temporal aggregation of volatility models. Journal of Econometrics, 119:355–379.
Melino, A. and Turnbull, S. (1990). Pricing foreign currency options with stochastic volatility.
Journal of Econometrics, 45:239–265.
Nardari, F. and Scruggs, J. T. (2006). Bayesian analysis of linear factor models with latent
factors, multivariate stochastic volatility, and apt pricing restrictions. Journal of Financial and
Quantitative Analysis. Forthcoming.
Nelson, D. (1991). Conditional heteroskedasticity in asset returns: A new approach. Econometrica,
59:347–370.
Ogaki, M. (1993). Generalized method of moments: Econometric applications. Handbook of Statistics,
11:455–488.
Pieró, A. (1999). Skewness in financial returns. Journal of Banking and Finance, 23:847–862.
Ross, S. A. (1976). The arbitrage theory of asset pricing. Journal of Economic Theory, 13:641–660.
Rubinstein, M. E. (1973). The fundamental theorem of parameter-preference security valuation.
Journal of Financial and Quantitative Analysis, 8:61–69.
26
Ruiz, E. (1994). Quasi-maximum likelihood estimation of stochastic volatility models. Journal of
Econometrics, 63:289–306.
Sentana, E. (1995). Quadratic garch models. Review of Economic Studies, 62:639–661.
Sentana, E., Calzolari, G., and Fiorentini, G. (2004). Indirect estimation of conditionally heteroscedastic factor models. Working Paper. CEMFI.
Sentana, E. and Fiorentini, G. (2001). Identification, estimation and testing of conditionally
heteroscedastic factor models. Journal of Econometrics, 102:143–164.
Singleton, K. (2001). Estimation of affine asset pricing models using the empirical characteristic
function. Journal of Finance, 102:111–141.
Taylor, S. J. (1986). Modeling Financial Time Series. John Wiley.
27
A
An Extended Kalman Filter for the latent common factor and
volatility processes
The heteroskedastic factor model is defined by:
2
ft+1 = σt ²t+1
σt+1
= 1 − γ + γσt2 + wt+1
(22a)
Yt+1 = µ + λft+1 + Ut+1
(22b)
¡ 2
¢
with: E (wt+1 |Jt ) = E (²t+1 |Jt ) = 0, E (Ut+1 |Jt ) = 0, E ²t+1 |Jt = 1, V ar (Ut+1 |Jt ) = Ω.
2
are unobservable; in fact, only the multivariate return
In this factor representation, both ft+1 and σt+1
process (Yt+1 ) is observable. However, the latent bi-dimensional process Zt = (ft , σt2 )0 depend nonlinearly on
its past value up to some shocks. The Extend Kalman Filter’s algorithm (see Sorensen, 1985) is an attractive
algorithm for this framework to filter Zt from the observations provided that the parameters are known. The
state equation is given by equations in (22a) while the measurement equation is (22b).
Still, the problem that occurs in a such procedure is the positivity of σt2 . A naive filter could lead to negative
2
σt . For that reason, we propose to filter zt = (ft , xt )0 and then, we can deduce σt2 ≡ x2t ; taking advantage from
the following result:
p
√
2
If (xt+1 ) is such that xt+1 = γxt + 1 − γ 2 vt+1 ; E(vt+1 |Jt ) = 0, E(vt+1
|Jt ) = 1; Jt an increasing filtration
2
as the one introduced in the body of this paper, then (xt+1 ) is an SR-SARV(1) process with persistence γ and
intercept 1 − γ with respect to Jt .
Our state-space representation is:
q
ft+1 =
x2t ²t+1
xt+1 =
√
γxt +
p
1 − γ 2 vt+1
Yt+1 = µ + λft+1 + Ut+1
(23a)
(23b)
¢
¢
¡ 2
¡
|Jt = 1 V ar (Ut+1 |Jt ) = Ω.
With: E (vt+1 |Jt ) = E (²t+1 |Jt ) = 0, E (Ut+1 |Jt ) = 0, E ²2t+1 |Jt = 1, E vt+1
To allow for leverage, we will set Cov(²t+1 , vt+1 |Jt ) = α where α has any negative value. In our applications,
we choose α =µ−.5. ¶
¶
µ
¶
µp 2
0 0
1
−.5
xt p 0
√ , Wt =
For: A =
,
H
=
(λ|0),
Q
=
, the Extended Kalman Filter
0
−.5
1
γ
1 − γ2
0
algorithm is the following:
p
µ
¶
1
− .5(1 + γ)
0
p
Initial value: ẑ0 = (0, 1) , P0 =
,
− .5(1 + γ)
1+γ
Time Update (”Predict”)
1. Project the state ahead:
zt− = Aẑt−1
2. Project the error covariance ahead:
Pt− = APt−1 A0 + Wt QWt0
Measurement Update (”Correct”)
3. Compute Kalman Gain:
Kt = Pt− H 0 (HPt− H 0 + Ω)−1
4. Update estimate with measurement Yt : ẑt = zt− + Kt (Yt − µ − Hzt− )
5. Update the error covariance:
Pt = Pt− − Kt HPt−
6. t = t + 1, Go To 1.
In this algorithm, the parameters are considered as known. In our application, we either use the GMM
parameter estimates of the Doz and Renault (2004) model (DR) which lead to the filtered process zdr,t or the
GMM parameter estimates of our conditionally heteroskedastic factor model with asymmetries (CHFA) which
lead to the filtered process zas,t for both the factor and volatility.
B
Data Appendix and Tables
The following table presents the indices we use in this paper. The first index listed refers to the FTSE 350
index. All of 24 sectorial indices listed are in FTSE while 14 of them are in the FTSE 350. The sectorial
28
indices which are not in FTSE 350 are the following: (-)-All Share Ex. Inv. Trusts, 13- FTSE Financials,
14-Transport, 15-Speciality & Other Finc., 16-Prsnl. Care & Hhld. Prods., 17-General Industrials, 18-General
Retailers, 19-Household Goods & Text. 20-Oil & Gas, 24-Support Services.
Our Data are obtained from Datastream. With pi,t being the index i level at day t, we obtain the daily
log-return series ri,t (in %) by: ri,t = 100 × (log pi,t − log pi,t−1 ). We use the log-return of the UK one month
loan index JPM UK CASH 1M (rt ) as safe interest rate. The log-excess return of the index i is Yi,t = ri,t − rt .
Our daily excess returns cover the period from January 2, 1986 through December 30, 2004. Only the 4863
trading days are considered.
Number
1
2
3
4
5
6
7
8
9
10
11
12
-
Corresponding
Sectorial index
FTSE Actuaries 350
Banks
Beverages
Cnstr. & Bldg. Mats.
Chemicals
Eng. & Machinery
Food & Drug Retailers
Food Prod. & Procr
Insurance
Life Assurance
Investment Companies
Leisure & Hotels
All Share Ex. Inv. Trusts
Number
13
14
15
16
17
18
19
20
21
22
23
24
29
Corresponding
Sectorial index
FTSE Financials
Transport
Speciality & Other Finc.
Prsnl. Care & Hhld. Prods.
General Industrials
General Retailers
Household Goods & Text.
Oil & Gas
Forestry & Paper
Health
Pharm. & Biotec
Support Services
30
Indices 1
1 1.0
2 0.8
3 0.6
4 0.7
5 0.7
6 0.6
7 0.6
8 0.7
9 0.7
10 0.8
11 0.8
12 0.7
- 1.0
13 0.9
14 0.7
15 0.7
16 0.4
17 0.8
18 0.7
19 0.4
20 0.6
21 0.3
22 0.6
23 0.7
24 0.7
3
1.0
0.4
0.4
0.4
0.5
0.6
0.4
0.5
0.5
0.5
0.6
0.5
0.5
0.4
0.4
0.5
0.5
0.3
0.4
0.2
0.4
0.4
0.4
2
1.0
0.5
0.5
0.5
0.5
0.5
0.5
0.6
0.7
0.7
0.6
0.8
0.9
0.6
0.6
0.3
0.6
0.6
0.3
0.5
0.3
0.4
0.5
0.6
1.0
0.5
0.6
0.4
0.5
0.5
0.5
0.6
0.6
0.7
0.6
0.6
0.5
0.3
0.7
0.6
0.5
0.4
0.4
0.4
0.4
0.6
4
1.0
0.6
0.4
0.5
0.5
0.5
0.6
0.5
0.7
0.6
0.6
0.5
0.3
0.6
0.5
0.4
0.4
0.3
0.4
0.5
0.5
5
1.0
0.4
0.5
0.5
0.5
0.6
0.5
0.6
0.6
0.6
0.5
0.3
0.8
0.5
0.4
0.4
0.4
0.4
0.4
0.6
6
1.0
0.5
0.4
0.5
0.4
0.4
0.6
0.5
0.4
0.3
0.3
0.4
0.5
0.3
0.3
0.2
0.3
0.4
0.4
7
1.0
0.5
0.5
0.5
0.5
0.7
0.6
0.5
0.4
0.4
0.5
0.5
0.4
0.4
0.2
0.4
0.5
0.5
8
1.0
0.7
0.6
0.5
0.7
0.7
0.5
0.5
0.3
0.6
0.5
0.3
0.4
0.3
0.4
0.4
0.5
9
1.0
0.6
0.5
0.8
0.8
0.6
0.6
0.3
0.6
0.6
0.3
0.4
0.2
0.4
0.5
0.5
10
1.0
0.6
0.8
0.8
0.6
0.7
0.3
0.7
0.6
0.4
0.5
0.4
0.5
0.5
0.7
11
1.0
0.7
0.6
0.6
0.6
0.3
0.6
0.6
0.4
0.4
0.3
0.4
0.4
0.6
12
1.0
0.9
0.7
0.7
0.4
0.8
0.7
0.4
0.6
0.3
0.6
0.7
0.7
-
1.0
0.7
0.7
0.4
0.7
0.6
0.4
0.5
0.3
0.5
0.6
0.7
13
1.0
0.6
0.3
0.7
0.6
0.4
0.4
0.3
0.5
0.5
0.6
14
1.0
0.2
0.6
0.5
0.4
0.4
0.3
0.4
0.4
0.6
15
1.0
0.3
0.3
0.2
0.3
0.2
0.3
0.3
0.3
16
Sample correlation matrix of indices excess returns.
Table I
1.0
0.6
0.4
0.4
0.3
0.5
0.5
0.6
17
1.0
0.4
0.4
0.3
0.4
0.4
0.5
18
1.0
0.2
0.2
0.3
0.3
0.4
19
1.0
0.2
0.3
0.4
0.4
20
1.0
0.2
0.2
0.3
21
1.0
0.4
0.5
22
1.0
0.5
23
1.0
24
31
S.d.
0.43
0.64
0.59
0.50
0.51
0.52
0.56
0.47
0.69
0.68
0.41
0.52
0.42
0.51
0.44
0.50
0.62
0.47
0.50
0.46
0.60
0.78
0.57
0.67
0.46
Min
-5.22
-6.02
-6.59
-4.88
-5.12
-5.84
-4.67
-4.41
-6.68
-6.19
-5.33
-4.98
-5.12
-5.28
-4.96
-5.45
-7.59
-5.61
-5.91
-4.85
-4.73
-10.66
-5.98
-7.30
-5.44
Max
2.50
4.37
5.46
4.36
2.83
4.67
3.50
2.82
4.62
4.26
2.66
3.77
2.46
3.18
3.29
3.85
6.41
2.50
3.17
4.71
4.01
9.43
6.22
6.66
2.91
Skew.
-0.88c
-0.14
-0.15
-0.16
-0.68c
-0.46
-0.24c
-0.57c
-0.53c
-0.28
-1.07b
-0.33
-0.91c
-0.47
-0.60c
-0.82b
-0.36
-1.00b
-0.45
-0.31
-0.17
0.00
0.02
-0.23
-1.17b
NOTES: S.d.: Standard deviation; Skew.: Skewness; Kurt.: Kurtosis.
Sector
Mean
FTSE actuaries 350 0.0051
Banks
0.0157
Beverages
0.0063
Cnstr. & Bld. Mat. 0.0031
Chemicals
0.0006
Eng. & Machinery 0.0020
Food & Drug Ret. 0.0040
Food Prod. & Pr. 0.0046
Insurance
-0.0074
Life Assurance
0.0083
Investment Cies
0.0037
Leisure & Hotels
0.0066
All Share Ex. Inv. 0.0050
FTSE Financials
0.0093
Transport
0.0018
Speciality & Fin.
0.0072
Prsnl. Care & Hlhd. 0.0074
General Industr.
-0.0011
General Retailers
0.0003
Hhld. Goods & Tex.-0.0024
Oil & Gas
0.0096
Forestry & Paper
0.0020
Health
0.0032
Pharm. & Biotec
0.0093
Support Services
0.0005
a
Kurt.
13.72
8.80
11.41
11.54
11.13
15.25
6.72
10.78
12.19
9.08
14.82
10.52
14.05
11.07
11.46
15.23
16.30
13.64
10.35
18.62
7.16
19.93
18.31
12.91
16.07
b
Eng(1)
991.76a
563.79a
446.71a
593.69a
555.30a
250.18a
369.04a
542.73a
207.09a
437.14a
369.27a
638.59a
986.94a
559.65a
445.47a
451.21a
144.00a
659.92a
456.48a
377.43a
348.89a
34.59a
415.23a
1119.87a
647.02a
denotes significance at 1%;
m̂3
-0.07c
-0.04
-0.03
-0.02
-0.09c
-0.07
-0.04c
-0.06c
-0.18c
-0.09
-0.07b
-0.05
-0.07c
-0.06
-0.05c
-0.10b
-0.09
-0.11b
-0.06
-0.03
-0.04
0.00
0.00
-0.07
-0.11b
ρ̂1
0.06a
0.09a
0.04b
0.23a
0.09a
0.20a
0.02
0.06a
0.10a
0.05a
0.10a
0.10a
0.06a
0.10a
0.13a
0.16a
0.04b
0.15a
0.08a
0.16a
0.05a
0.12a
0.03b
0.05b
0.12a
significance at 5% and
Eng(5)
1108.39a
662.52a
508.58a
787.08a
764.20a
581.27a
455.57a
644.55a
477.98a
675.70a
585.52a
851.52a
1116.07a
746.96a
615.20a
609.49a
214.19a
846.00a
531.52a
762.23a
611.46a
136.26a
566.44a
1169.80a
975.25a
c
ρ̂3
-0.03
-0.04c
-0.04c
0.04
0.04c
0.04c
-0.04
-0.01
-0.01
-0.05a
0.04c
0.01
-0.03
-0.03
0.05a
0.03
-0.01
0.03
-0.02
0.06a
-0.05a
-0.02
0.01
-0.02
0.02
significance at 10%.
ρ̂2
-0.01
-0.04c
-0.05b
0.09a
0.05b
0.08a
0.00
0.01
-0.03
0.00
0.05b
0.01
0.00
-0.01
0.03
0.05b
0.01
0.04a
0.01
0.05b
-0.04b
0.04b
-0.02
-0.06a
0.02
QW(5)
32.51a
60.06a
26.33a
324.88a
67.17a
259.56a
11.84b
23.56a
52.55a
36.22a
104.31a
63.34a
35.46a
66.30a
117.40a
169.45a
14.49b
138.96a
39.43a
197.04a
37.91a
81.91a
10.72c
29.01a
77.86a
QW(10)
54.76a
71.46a
32.18a
338.57a
77.67a
296.05a
17.32c
35.94a
66.64a
54.77a
142.90a
90.46a
59.83a
90.66a
133.16a
248.94a
14.84
159.68a
45.42a
249.96a
44.79a
96.85a
32.11a
30.32a
91.18a
Descriptive statistics for the daily indices excess returns (in %). All series start at January 2, 1986 through December 30, 2004. The number of observations
¤3
¤4
PT £
PT £
is 4863. The sample Skewness and Kurtosis are given by: Skew= t=1 (Yi,t − Yi )/σYi /T and Kurt= t=1 (Yi,t − Y i )/σYi /T , respectively. Yi is the
sample mean and σY2 i the sample variance of Yi . m̂3 is the sample third central moment. The significance tests for the Skewness and the third central
moment have been performed by Moment method-based asymptotic distribution of sample mean and δ−method.
Eng(1) and Eng(5) are the Engle’s Lagrange Multiplier tests statistics for conditional heteroskedasticity (Engle, 1982). 1 and 5 lags have been
considered, respectively. ρ̂1 , ρ̂2 and ρ̂3 are the first three sample autocorrelations. QW(5) and QW(10) are the Ljung -Box statistics for autocorrelation.
Table II
Table III
Engle and Ng Diagnostic Test for the Impact of News on Volatility (Engle an Ng, 1993)
This Table displays, for each index excess return, the diagnostic test results for respectively the Sign Bias, The
Negative Size Bias, the Positive Size Bias and the joint test. The volatility dynamic under the null we assume
is the standard Gaussian GARCH(1,1).
FTSE Actuaries 350
Banks
Beverages
Cnstr. & Bldg. Mats.
Chemicals
Eng. & Machinery
Food & Drug Retailers
Food Prod. & Procr.
Insurance
Life Assurance
Investment Companies
Leisure & Hotels
All Share Ex. Inv. Trusts
FTSE Financials
Transport
Speciality & Other Finc.
Prsnl. Care & Hhld. Prods.
General Industrials
General Retailers
Household Goods & Text.
Oil & Gas
Forestry & Paper
Health
Pharm. & Biotec
Support Services
NOTES: a ,
b
and
c
Sign
Bias
2.18b
1.22
1.26
1.62
1.32
1.71c
2.54b
0.65
1.57
1.18
2.65a
1.61
2.22b
2.69a
2.32b
2.11b
-0.07
1.88c
1.34
0.62
0.53
-0.22
-0.47
1.50
2.21b
Diagnostic Test Results
Negative Positive
Joint
Size Bias Size Bias
Test
-2.26b
-5.03a
96.53a
-4.30a
-5.45a
94.09a
a
a
-6.23
-8.47
115.38a
a
a
-3.92
-3.13
17.41a
b
a
-2.18
-3.76
36.09a
b
a
-1.92
-4.21
45.54a
a
a
-4.22
-4.88
37.64a
c
0.56
-1.74
27.98a
a
a
-3.44
-3.43
16.70a
a
a
-3.07
-5.05
38.56a
a
a
-4.43
-6.29
48.98a
b
-0.26
-2.45
30.04a
b
a
-2.24
-5.03
91.75a
a
a
-4.65
-6.16
67.79a
a
a
-4.17
-5.27
34.41a
a
a
-5.48
-6.49
58.26a
b
1.36
2.20
14.05a
a
a
-3.03
-4.68
46.04a
c
a
-1.88
-5.06
56.55a
a
a
-3.44
-3.59
22.86a
a
-0.98
-3.45
33.14a
c
-0.91
-1.79
27.25a
a
a
3.07
2.57
26.85a
a
a
-6.85
-8.61
223.87a
a
a
-2.72
-4.17
41.03a
denote significance at 1%, 5% and 10%, respectively.
32
Table IV
This Table presents, for each sectorial index and the market index FTSE 350, π̂1 and ĥ1 , ordinary
£ least square
¤
estimates of π1 and h1 respectively in the regressions E [²i,t Σii,t |Σii,t−1 ] = π0 + π1 Σii,t−1 and E ²3i,t |Σii,t−1 =
h0 + h1 Σii,t−1 . ²i,t ≡ Yi,t − Y i , Yi,t is the excess return of the index i at date t, Y i is the sample mean of the
excess return of i and Σii,t is the conditional variance of Yi,t+1 . As a proxy for Σii,t , we use the daily Square
2
excess return: Yi,t+1
.
π̂f,1 and ĥf,1 , ordinary least£ square estimates
of πf,1 and hf,1 respectively in the regressions E [²i,t Σ11,t |Σ11,t−1 ] =
¤
πf,0 + πf,1 Σ11,t−1 and E ²3i,t |Σ11,t−1 = hf,0 + hf,1 Σ11,t−1 . Σ11,t is the FTSE 350 index excess return’s
2
conditional variance. The proxy used for this conditional variance is Y1,t+1
where Y1,t+1 is the FTSE 350
index excess return. Co-Skewness of the sectorial index excess return Yi,t with the FTSE 350 index excess return
by Co-Skewness(Yi,t , Y1,t ) = E[(Yi,t − E(Yi,t ))(Y1,t −
hpY1,t is given, as in Ang and Chen (2002),
i
2
2
2
EY1,t ) ]/
E(Yi,t − E(Yi,t )) E(Y1,t − E(Y1,t )) . The significance tests for the Co-Skewness have been performed by Moment method-based asymptotic distribution of sample mean and the δ−method.
Sector
FTSE Actuaries 350
Banks
Beverages
Cnstr. & Bldg. Mats.
Chemicals
Eng. & Machinery
Food & Drug Retailers
Food Prod. & Procr.
Insurance
Life Assurance
Investment Companies
Leisure & Hotels
All Share Ex. Inv. Trusts
FTSE Financials
Transport
Speciality & Other Finc.
Prsnl. Care & Hhld. Prods.
General Industrials
General Retailers
Household Goods & Text.
Oil & Gas
Forestry & Paper
Health
Pharm. & Biotec
Support Services
NOTES: a ,
b
and
c
π̂1
-1.74a
-1.29a
-1.26a
-0.41a
-1.26a
-0.36a
-0.66a
-0.79a
-0.73a
-0.82a
-0.79a
-0.82a
-1.70a
-1.09a
-0.83a
-0.85a
0.06a
-1.37a
-0.92a
-0.82a
-0.61a
-0.23a
0.49a
-2.82a
-1.52a
ĥ1
-3.13a
-1.64a
-1.27a
-0.58a
-2.70a
-1.66a
-0.99a
-1.78a
-2.87a
-1.52a
-2.96a
-1.52a
-3.07a
-2.10a
-2.17a
-2.12a
-2.21a
-3.19a
-2.67a
-1.14a
-0.96a
-1.70a
0.37a
-1.59a
-3.50a
π̂f,1
-1.74a
-1.97a
-1.74a
-1.38a
-1.87a
-1.58a
-1.31a
-1.60a
-2.20a
-1.75a
-1.39a
-1.76a
-1.71a
-1.73a
-1.42a
-1.64a
-1.54a
-1.75a
-1.49a
-1.67a
-1.68a
-0.94a
-1.97a
-2.45a
-1.86a
ĥf,1
-3.13a
-4.57a
-4.52a
-1.95a
-3.40a
-4.02a
-1.76a
-2.18a
-5.06a
-3.96a
-2.59a
-2.80a
-2.98a
-3.16a
-2.20a
-3.49a
-2.33a
-3.59a
-3.25a
-3.09a
-2.44a
-0.77c
-3.31a
-7.73a
-4.00a
denote significance at 1%, 5% and 10%, respectively.
33
Co-Skewness
-0.88c
-0.39
-0.49
-0.46
-0.68c
-0.69c
-0.30
-0.56c
-0.42
-0.36
-0.96b
-0.53
-0.90c
-0.61
-0.66c
-0.82b
-0.30
-0.81c
-0.53
-0.81c
-0.40c
-0.13
-0.46
-0.48
-0.95c
Table V
Simulated bias, root mean square error (RMSE), median and least absolute deviation (LAD) of generalized
method of moments (GMM) parameter estimates of Doz and Renault (2004) model (DR) and our conditionally
heteroskedastic factor model with asymmetries (CHFA). We report the results from GMM estimates using 4
P20
2
2
2
2
different sets of valid instruments: z1,t = (1, Y1,t
), z2,t = (1, i=1 Y1,t−1+1
); ρ = .9, z3,t = (1, Y1,t
, Y1,t−1
) and
2
2
2
z4,t = (1, Y1,t , Y1,t−1 , Y1,t−2 ).
The simulated data are obtained by the parameter set given in Experiment 1: (λ1 , λ2 , λ3 , ω, α, β, γ, s, h1 , π0 ,
π1 )=(1, 1, 1, .5, .2, .6, .8, 0, 0, 0, 0). We use the moment conditions proposed under the calibration approach
we present in Section 5. The estimated parameters are: λ2 , λ3 , ω, γ for DR (2004) model and λ2 , λ3 , ω, α, β,
γ, s, h1 , π0 , π1 for CHFA model.
Parameter
z1,t
γ
λ2
λ3
ω
s
h1
π0
π1
Bias
DR
RMSE Median
LAD
Bias
CHFA
RMSE Median
LAD
0.042
0.000
0.000
-0.001
-
0.146
0.016
0.016
0.007
-
0.850
0.999
1.000
0.499
-
0.125
0.012
0.013
0.006
-
0.045
0.000
0.000
-0.002
0.103
-0.069
0.027
-0.017
0.147
0.015
0.016
0.007
1.186
0.820
0.718
0.494
0.857
1.000
0.999
0.498
0.054
-0.035
0.058
-0.028
0.125
0.012
0.013
0.006
0.925
0.644
0.530
0.366
γ
λ2
λ3
ω
s
h1
π0
π1
0.080
-0.001
0.000
-0.001
-
0.154
0.016
0.016
0.007
-
0.891
0.999
1.000
0.499
-
0.112
0.013
0.013
0.006
-
0.103
0.000
-0.001
-0.004
0.036
-0.025
-0.007
0.007
0.129
0.019
0.020
0.008
1.180
0.842
0.773
0.538
0.905
1.000
1.000
0.496
0.065
-0.034
0.029
-0.025
0.112
0.014
0.015
0.007
0.867
0.631
0.460
0.335
γ
λ2
λ3
ω
s
h1
π0
π1
0.012
0.000
0.000
-0.002
-
0.110
0.016
0.016
0.007
-
0.813
0.999
1.000
0.498
-
0.090
0.013
0.013
0.006
-
0.022
0.000
-0.001
-0.003
0.104
-0.071
0.044
-0.027
0.112
0.016
0.017
0.008
1.061
0.747
0.629
0.437
0.820
1.000
1.000
0.497
0.080
-0.061
0.044
-0.009
0.092
0.012
0.013
0.006
0.833
0.591
0.439
0.309
γ
λ2
λ3
ω
s
h1
π0
π1
0.001
0.000
0.000
-0.003
-
0.101
0.016
0.016
0.008
-
0.797
0.999
1.000
0.497
-
0.082
0.013
0.013
0.006
-
0.014
0.000
-0.001
-0.004
0.098
-0.068
0.040
-0.025
0.101
0.016
0.017
0.008
1.009
0.720
0.572
0.402
0.808
1.001
1.000
0.496
0.077
-0.082
0.033
-0.016
0.081
0.012
0.013
0.006
0.787
0.567
0.406
0.289
z2,t
z3,t
z4,t
34
Table VI
Simulated Bias, root mean square error (RMSE), median and least absolute deviation (LAD) of generalized
method of moments (GMM) parameter estimates of Doz and Renault (2004) model (DR) and our conditionally
heteroskedastic factor model with asymmetries (CHFA). We report the results from GMM estimates using
2
2
2
z4,t = (1, Y1,t
, Y1,t−1
, Y1,t−2
) as valid instrument set in Experiments 1 through 3.
The simulated data in Experiment 1, are obtained by the parameters: (λ1 , λ2 , λ3 , ω, α, β, γ, s, h1 , π0 , π1 )=(1,
1, 1, .5, .2, .6, .8, 0, 0, 0, 0). In Experiment 2, the parameter value we use for simulation are: (λ1 , λ2 , λ3 , ω, α,
β, γ, s, h1 , π0 , π1 ) =(1, 1, 1, .5, .2, .7, .9, 0, 0, 0, 0) while in Experiment 3 (λ1 , λ2 , λ3 , ω, α, β, γ, s, h1 , π0 ,
π1 )=(1, 1, 1, .5, .2, .75, .95, 0, 0, 0, 0). These three experiments are different from their volatility persistence
which is .80, .90 and .95, respectively. We use the moment conditions proposed under the calibration approach
we present in Section 5. The estimated parameters are: λ2 , λ3 , ω, γ for DR (2004) model and λ2 , λ3 , ω, α, β,
γ, s, h1 , π0 , π1 for CHFA model.
Bias
DR
RMSE Median
Parameter
Exp. 1
γ
λ2
λ3
ω
s
h1
π0
π1
0.001
0.000
0.000
-0.003
-
0.101
0.016
0.016
0.008
-
Exp. 2
γ
λ2
λ3
ω
s
h1
π0
π1
-0.007
0.000
0.000
-0.003
-
Exp. 3
γ
λ2
λ3
ω
s
h1
π0
π1
-0.018
0.000
0.000
-0.003
-
CHFA
RMSE Median
LAD
Bias
0.797
0.999
1.000
0.497
-
0.082
0.013
0.013
0.006
-
0.014
0.000
-0.001
-0.004
0.098
-0.068
0.040
-0.025
0.101
0.016
0.017
0.008
1.009
0.720
0.572
0.402
0.808
1.001
1.000
0.496
0.077
-0.082
0.033
-0.016
0.081
0.012
0.013
0.006
0.787
0.567
0.406
0.289
0.075
0.016
0.017
0.008
-
0.889
1.000
1.001
0.497
-
0.063
0.013
0.013
0.006
-
0.003
0.000
-0.001
-0.004
0.036
-0.025
-0.007
0.007
0.079
0.019
0.020
0.008
1.180
0.842
0.773
0.538
0.905
1.000
1.000
0.496
0.065
-0.034
0.029
-0.025
0.064
0.014
0.015
0.007
0.867
0.631
0.460
0.335
0.065
0.017
0.017
0.008
-
0.936
1.000
1.001
0.497
-
0.051
0.014
0.014
0.006
-
-0.016
0.002
0.000
-0.004
0.007
0.052
-0.152
0.047
0.066
0.026
0.024
0.010
3.631
1.426
2.211
0.875
0.944
1.001
1.001
0.496
-0.046
0.056
0.010
-0.006
0.052
0.018
0.017
0.007
1.342
0.872
0.701
0.454
NOTES: Exp. denotes Experiment.
35
LAD
36
T=
τ=
γ=
J=
4863
3.36E-03
0.685
111.59 [p − V alue]= .999
NOTES: Estimated GMM standard errors in parenthesis.
DR:
Idiosyncratic
DR
est. s.e.
0.02 0.07
0.23 0.93
0.19 1.08
0.22 0.82
0.20 0.80
0.23 0.96
0.20 0.85
0.15 0.71
0.40 1.47
0.25 1.13
0.08 0.41
0.20 0.69
0.13 0.49
0.13 0.47
0.19 0.86
0.31 1.95
0.12 0.58
0.12 0.64
0.21 0.86
0.28 1.08
0.56 3.53
0.27 1.74
0.15 1.34
0.15 0.55
Variances
CHFA
est. s.e.
0.03 0.05
0.31 0.70
0.17 0.87
0.20 0.58
0.16 0.61
0.16 0.63
0.21 0.69
0.15 0.55
0.42 1.05
0.31 0.94
0.05 0.33
0.21 0.49
0.16 0.34
0.09 0.35
0.15 0.69
0.30 1.50
0.10 0.45
0.08 0.51
0.15 0.69
0.30 0.81
0.58 2.76
0.33 1.19
0.35 1.15
0.12 0.46
si
CHFA
est. s.e.
0.30 0.43
0.37 0.75
0.56 1.21
0.33 0.57
0.36 0.64
0.56 0.93
0.16 0.56
0.15 0.51
0.13 1.31
0.43 1.17
0.32 0.49
0.21 0.43
0.31 0.52
0.31 0.47
0.39 0.79
0.16 1.57
0.36 0.70
0.43 0.73
0.35 0.82
0.19 0.75
0.08 4.09
0.10 1.22
0.18 1.52
0.32 0.64
(0.0090)
(0.0030)
CHFA:
T=
τ=
γ=
h1 =
4863
1.72E-04
0.684
-6.394
(0.0026)
(0.0015)
(0.0131)
π0 =
π1 =
J=
0.7724
(0.0247)
-1.458
(0.0035)
117.75 [p − V alue]= .999
NOTES: est.: Estimate; s.e.: Estimated GMM standard error×100; si : Conditional third moment model’s intercept.
Sector
FTSE Actuaries 350
Banks
Beverages
Cnstr. & Bldg. Mats.
Chemicals
Eng. & Machinery
Food & Drug Retailers
Food Prod. & Procr.
Insurance
Life Assurance
Investment Companies
Leisure & Hotels
FTSE Financials
Transport
Speciality & Other Finc.
Prsnl. Care & Hhld. Prods.
General Industrials
General Retailers
Household Goods & Text.
Oil & Gas
Forestry & Paper
Health
Pharm. & Biotec
Support Services
Factor Loadings
DR
CHFA
est. s.e.
est. s.e.
0.35
0.35
0.43 0.08
0.34 0.02
0.37 0.12
0.40 0.03
0.31 0.11
0.35 0.02
0.33 0.10
0.39 0.03
0.33 0.11
0.43 0.02
0.29 0.12
0.28 0.04
0.30 0.08
0.29 0.02
0.34 0.15
0.34 0.05
0.46 0.12
0.39 0.04
0.30 0.07
0.36 0.01
0.33 0.10
0.32 0.02
0.38 0.06
0.35 0.01
0.29 0.07
0.35 0.01
0.33 0.10
0.39 0.03
0.27 0.13
0.31 0.05
0.35 0.07
0.39 0.02
0.33 0.09
0.38 0.02
0.28 0.18
0.37 0.03
0.31 0.12
0.30 0.05
0.19 0.17
0.19 0.09
0.34 0.10
0.25 0.05
0.48 0.11
0.15 0.07
0.33 0.08
0.37 0.02
Generalized method of moments parameter estimates of Doz and Renault (2004) model (DR) and our conditionally heteroskedastic factor model with
asymmetries (CHFA).
Table VII
Table VIII
Descriptive statistics of the filtered factors and their correlation with the FTSE 350 index excess return. The
filtered factors are obtained by the extended Kalman filter algorithm we propose (see Appendix A) and we
use the generalized method of moments (GMM) parameter estimates from the Doz and Renault (2004) model
(DR) and the GMM parameter estimates from our conditionally heteroskedastic factor model with asymmetries
(CHFA).
Mean
Standard error
Skewness
Corr. with FTSE 350
Filtered Factor from :
DR estimates CHFA estimates
0.003
0.004
0.971
0.901
-1.712
-1.844
0.922
0.897
NOTES: Corr. denotes Correlation.
Table IX
Descriptive statistics of the filtered FTSE 350 index excess return idiosyncratic shocks. These filtered idiosyncratic shocks are given by udr,t+1 = Y1,t+1 − λfdr,t+1 and uchf a,t+1 = Y1,t+1 − λfchf a,t+1 where Y1,t+1 is the
FTSE 350 index excess return, fdr,t+1 is the filtered factor using the GMM parameter estimates from DR (2004)
model and fchf a,t+1 the filtered factor using the GMM parameter estimates from our conditionally heteroskedastic factor model with asymmetries (CHFA). Eng(1) is the lag 1 Engle’s Lagrange Multiplier test statistics for
conditional heteroskedasticity (Engle, 1982).
udr,t+1
Mean
Standard error
Skewness
Corr. with FTSE 350
Eng(1)
0.004
0.163
0.465
0.610
5.200
[p − V alue]=0.459
[p − V alue]=0.023
uchf a,t+1
0.003
0.187
-0.140
0.711
9.437
[p − V alue]=0.798
[p − V alue]=0.002
NOTES: Corr. denotes Correlation.
C
Proofs of propositions
Proof of proposition 4.1: The expression given in (13) is obvious and arises out from the sum of (1) over
the time
period:
³
´ τ =
³ (t − 1)m
´ + 1 through tm with the respective aggregation coefficients αl and µ(Jt ) = µ.
(m)
(m)
(m)
(m)
Let F(t+1)m and U(t+1)m be the resulting factor and the idiosyncratic shocks and let Dtm be the Jtm conditional variance of this factor.
³
´
³
´ ³
´
(m)
(m)
(m)0
(m)
(m)
(m)
(m)0
(m)
Dtm = E F(t+1)m F(t+1)m |Jtm − E F(t+1)m |Jtm E F(t+1)m |Jtm .
On the other hand,
³
´
(m)
E F(t+1)m |Jtm
=
=
Pm
Pm
E (( l=1 αl Ftm+l ) |Jtm ) = l=1 αl E (Ftm+l |Jtm )
Pm
l=1 αl E (E (Ftm+l |Jtm+l−1 ) |Jtm ) = 0.
(m)
The last equality holds by the law of iterated expectations and the last is from (2). Since Jtm ³is included in Jtm
´
(m)
(m)
by definition, the law of iterated expectations also applies the following way: E(X|Jtm ) = E E(X|Jtm )|Jtm
³
´
(m)
(m)
for any measurable X. Therefore, E F(t+1)m |Jtm = 0.
37
Let us consider k and k 0 such that k 6= k 0 .
³
´
³P
´
Pm
(m)
(m)
(m)
(m)
m
E Fk,(t+1)m Fk0 ,(t+1)m |Jtm = E ( l=1 αl Fk,tm+l ) ( l=1 αl Fk0 ,tm+l ) |Jtm
=
E
+
hP
m
l<l0 ;l,l0 =1
Pm
αl αl0 (Fk,tm+l Fk0 ,tm+l0 + Fk0 ,tm+l Fk,tm+l0 )
(m)
l=1
αl2 Fk,tm+l Fk0 ,tm+l |Jtm
i
.
But, from the law of iterated expectations and (2), for l < l0 ,
E (Fk,tm+l Fk0 ,tm+l0 |Jtm ) = E (Fk,tm+l E (Fk0 ,tm+l0 |Jtm+l0 −1 ) |Jtm ) = 0 and in addition, as Dt is diagonal for all
t from (2), E (Fk,tm+l Fk0 ,tm+l |Jtm ) = E (E (Fk,tm+l Fk0 ,tm+l |Jtm+l−1
³ ) |Jtm ) = E (Dk,k0 ,tm+l−1
´ |Jtm ) = 0.
(m)
(m)
(m)
By the law of iterated expectations as above we can deduce that E Fk,(t+1)m Fk0 ,(t+1)m |Jtm
= 0 and therefore
(m)
Dtm
is diagonal.
³
´
(m)
(m)
By the law of iterated expectations and simple product expansion, we easily show that E U(t+1)m |Jtm = 0
³
´
(m)
(m)0
(m)
and E U(t+1)m F(t+1)m |Jtm = 0. On the other hand,
³
´
³P
´
Pm
0
(m)
(m)
(m)
m
V ar U(t+1)m |Jtm
= E ( l=1 αl Utm+l ) ( l=1 αl Utm+l ) |Jtm
= E
³P
m
l<l0 ;l,l0 =1
0
0
αl αl0 (Utm+l Utm+l
0 + Utm+l0 Utm+l )
´
(m)
0
αl2 Utm+l Utm+l
|Jtm
¡
¢
¡
¡ 0
¢
¢
0
For l < l0 , E Utm+l Utm+l
= E Utm+l E Utm+l
=0
0 |Jtm
0 |Jtm+l0 −1 |Jtm
³
´
¡
¢
¡ ¡
¢
¢
(m)
(m)
0
0
and E Utm+l Utm+l |Jtm = E E Utm+l Utm+l |Jtm+l−1 |Jtm = E (Ω|Jtm ) = Ω thus, V ar U(t+1)m |Jtm =
Pm
Ω l=1 αl2 completing the proof of Proposition 4.1¤
+
Pm
l=1
2
− (1 − γ) − γσt2 , we
Proof of proposition 4.2: Since (ft+1 ) has a SR-SARV(1) dynamic, with vt+1 ≡ σt+1
2
have: E(vt+1 |Jt ) = 0. For l = 1, the first conclusion of the proposition is obvious since σtm is Jtm -measurable.
For l ≥ 2, by writing vt+1 for different time and making some simple substitutions, we can write:
2
2
+ γ l−2 vtm+1 + γ l−3 vtm+2 + · · · + vtm+l−1 .
= (1 − γ)(1 + γ + γ 2 + · · · + γ l−2 ) + γ l−1 σtm
σtm+l−1
By taking the expectation conditionally on Jtm and by the law of iterated expectations, we have:
2
E(σtm+l−1
|Jtm )
=
2
(1 − γ)(1 + γ + γ 2 + · · · + γ l−2 ) + γ l−1 σtm
l−1
l−1 2
σtm
= (1 − γ) 1−γ
1−γ + γ
2
= 1 − γ l−1 + γ l−1 σtm
.
The first conclusion is then established. On the other hand,
³
´
¡Pm
¢
(m)
2
E (f(t+1)m )2 |Jtm
= E
l=1 (αl ftm+l ) |Jtm ,
ft (is conditionally non-autocorrelated)
=
=
=
=
Pm
l=1
Pm
l=1
Pm
l=1
Pm
l=1
2
αl2 E(ftm+l
|Jtm )
2
αl2 E(E(ftm+l
|Jtm+l−1 )|Jtm )
2
αl2 E(σtm+l−1
|Jtm )
2
]
αl2 [(1 − γ l−1 ) + γ l−1 σtm
38
³
´ P
(m)
(m)
(m)
m
2
2
Since σtm
is Jtm -measurable, E (f(t+1)m )2 |Jtm = l=1 αl2 [(1 − γ l−1 ) + γ l−1 σtm
]. Hence,
³
´
(m)2
(m)
(m)
(m)
(m) 2
σtm ≡ V ar f(t+1)m |Jtm = S1 + S2 σtm
(m)
with S1
=
Pm
l=1
(m)
αl2 [(1 − γ l−1 ) and S2
Proof of proposition 4.3:
³
´
(m)
(m)2
Cov f(t+1)m , σ(t+1)m |Jtm
=
=
=
=
=
=
=
=
=
=
=
Pm
l=1
³
´
(m)2
α
Cov
f
,
σ
|J
l
tm+l
tm
l=1
(t+1)m
Pm
³
´
(m)
(m) 2
αl Cov ftm+l , S1 + S2 σ(t+1)m
|Jtm
(from Proposition 4.2)
Pm
l=1
Pm
(m)
³
´
2
Cov ftm+l , σ(t+1)m
|Jtm
(m)
³
´
2
E ftm+l σ(t+1)m
|Jtm
(m)
³
³
´
´
2
E ftm+l E σ(t+1)m
|Jtm+l |Jtm
(m)
¡
¡
¢
¢
2
E ftm+l 1 − γ m−l + γ m−l σtm+l
|Jtm
l=1 αl S2
Pm
l=1
αl S2
Pm
l=1 αl S2
Pm
l=1
Pm
l=1
Pm
l=1
αl S2
(m) m−l
¡
¢
2
E ftm+l σtm+l
|Jtm
(m) m−l
¡ ¡
¢
¢
2
E E ftm+l σtm+l
|Jtm+l−1 |Jtm
αl S2
αl S2
γ
γ
¡
¢
(m)
2
|Jtm
αl S2 γ m−l E π0 + π1 σtm+l−1
(from Assumption 2)
Pm
l=1
Pm
l=1
(m)
≡ l1
On the other hand,
³
´
(m)
(m)2
(m)
Cov f(t+1)m , σ(t+1)m |Jtm
αl2 γ l−1 ¤
(m) m−l
αl S2
γ
(m) 2
σtm ,
+ l2
¡
¡ 2
¢
¢
π0 + π1 E σtm+l−1
|Jtm |Jtm
(m)
(Proposition 4.2); l1
(m)
and l2
two scalars.
³
´
h ³
´
i
(m)
(m)2
(m)
(m)
(m)2
(m)
= E f(t+1)m σ(t+1)m |Jtm = E E f(t+1)m σ(t+1)m |Jtm |Jtm
h
i
(m)
(m) 2
(m)
= E l1 + l2 σtm
|Jtm .
³
´
(m)
(m)
(m)2
(m)
(m)
(m) 2
2
Since σtm
is Jtm -measurable, Cov f(t+1)m , σ(t+1)m |Jtm = l1 + l2 σtm
and from the one to one mapping
(m)2
(m)
2
between σ³tm
and σtm from Proposition
4.2 we can deduce that there exists two scalars π0
´
(m)
(m)2
(m)
(m)
(m) (m)2
that Cov f(t+1)m , σ(t+1)m |Jtm ≡ π0 + π1 σtm ¤
(m)
and π1
Proof of proposition 4.4:
·³
´3 ¸
hP
i
3
(m)
m
Etm f(t+1)m
= Etm ( l=1 αl ftm+l )
=
=
Pm
3
)+3×
αl3 Etm (ftm+l
by the conditions in (2)
l=1
Pm
3
3
l=1 αl Etm (ftm+l ) + 3 ×
39
P
1≤l<l0 ≤m
P
1≤l<l0 ≤m
2
αl αl20 Etm (ftm+l ftm+l
0)
´
³
2
αl αl20 Etm ftm+l Etm+l0 −1 (fk,tm+l
0)
such
=
=
=
=
=
Pm
l=1
Pm
l=1
Pm
l=1
Pm
l=1
Pm
l=1
3
αl3 Etm (ftm+l
)+3×
3
αl3 Etm (ftm+l
)+3×
P
1≤l<l0 ≤m
P
1≤l<l0 ≤m
3
αl3 Etm (Etm+l−1 ftm+l
)+3×
¡
¢
2
αl αl20 Etm ftm+l Etm+l σtm+l
0 −1
³
´
0
2
αl αl20 Etm ftm+l γ l −l−1 σtm+l
P
2
αl3 Etm (h0 + h1 σtm+l−1
)+3×
0
1≤l<l0 ≤m
P
2
αl αl20 γ l −l−1 Etm (Etm+l−1 (ftm+l σtm+l
))
¢
¡
0
2
αl αl20 γ l −l−1 Etm π0 + π1 σtm+l−1
2
αl3 [h0 + h1 (1 − γ l−1 + γ l−1 σtm
)]
¢¤
£
¡
P
0
2
+3 × 1≤l<l0 ≤m αl αl20 γ l −l−1 π0 + π1 1 − γ l−1 + γ l−1 σtm
(from proposition 4.2)
=
Pm
l=1
£
¤
P
0
αl3 h0 + (1 − γ l−1 )h1 + 3 1≤l<l0 ≤m αl αl20 γ l −l−1 [π0 + π1 (1 − γ l−1 )]
h P
i
P
0
m
2
+ h1 l=1 αl3 γ l−1 + 3π1 1≤l<l0 ≤m αl αl20 γ l −2 σtm
≡
(m)
B0
(m) 2
σtm
+ B1
³
´
(m)
(m)
(m)
(m)
2
is Jtm -measurable, the law of iterated expectations implies that E (f(t+1)m )3 |Jtm
= B0 +
Since σtm
³
´
(m) 2
(m)
(m)
(m)
(m) (m)2
(m)
(m)
(m) (m)
B1 σtm
. By Proposition 4.2, E (f(t+1)m )3 |Jtm
= h0 + h1 σtm with h0 = B0 − h1 S1 and
(m)
(m)
h1 = B 1
E(X|Jt ).
(m)
/S2
µ³
E
(m)
; S1
(m)
Ui,(t+1)m
(m)
and S2
´3
are defined as in Proposition 4.2. In the calculations above, Et X stands for
¶
|Jtm
hence,
=
´
i
3 3
α
U
|J
(from (2))
tm
l=1 l i,tm+l
´
i
h³P
m
3
3
α
E(U
|J
)
|J
E
tm
i,tm+l tm+l−1
l=1 l
=
E
=
E
h³P
m
£¡Pm
l=1
¡Pm 3 ¢
¢
¤
αl3 s0i |Jtm = s0i
l=1 αl , (from Assumption 4)
!
Ãm
µ³
¶
´3
X
(m)
(m)
3
0
αl .
E
Ui,(t+1)m |Jtm = si
l=1
From Assumption 3 and Equations (2),
µ³
¶
µ³
¶
´3
´3 ³
´3
(m)
(m)
(m)
E
Yi,(t+1)m |Jtm
= E
λi f(t+1)m + Ui,(t+1)m |Jtm
= λ3i E
µ³
Thus, E
(m)
Yi,(t+1)m
´3
µ³
(m)
f(t+1)m
¶
(m)
|Jtm
(m)
2
= λ3i h1 σtm
+ λ3i h0 + s0i
´3
¶
|Jtm
¡Pm
l=1
µ³
+E
(m)
Ui,(t+1)m
´3
¶
|Jtm
¢
αl3 for all i and t ¤
0
0
0 1
1
0 0
Proof of proposition 5.1: ³
Since there
´ is a one to one linear relationship between φ2 and φ2 = (π0 , π1 , s1 , . . . , sN , h1 ) ,
0
it is sufficient to prove that ∂/∂φ02 [Ezt ⊗ g(Yt+1 , Yt+2 , φ02 )] has rank N + 3.
µ
¶
³
´
0
A 0
∂/∂φ02 [Ezt ⊗ g(Yt+1 , Yt+2 , φ02 )] =
with A(2N × 2), C(2N × N + 1) given by:
0 C
40
2
−Ezt
−λ3 Ezt Y1,t+1
3
2
−λ2 Ezt Y1,t+1
0
and C =
..
.
.
..
3
2
−λN Ezt Y1,t+1
0
−λ3 Ezt
−λ32 Ezt
A=
..
.
−λ3N Ezt
0
−Ezt
..
.
...
···
..
.
..
.
0
2
−λ3 Ezt Y1,t+1
0
..
.
2
−λ32 Ezt Y1,t+1
.
..
.
0
−Ezt
2
−λ3N Ezt Y1,t+1
We just need to show that A has rank 2 and C has rank N + 1. Since zt = (1, z1,t )0 ,
µ
As = −λ3
1
Ez1,t
2
EY1,t+1
2
Ez1,t Y1,t+1
¶
and Cs =
−1
0
···
..
.
−1
..
..
.
.
... 0
0 ...
0
..
.
0
−Ez1,t
2
−λ3 EY1,t+1
0
..
.
0
−1
0
2
−λ32 EY1,t+1
..
.
2
−λ3N EY1,t+1
3
2
−λ Ez1,t Y1,t+1
are two submatrix respectively of A and C (As (2 × 2) and Cs (N + 1 × N + 1)). Let Det(X) be the determinant of the matrix X. Det(As ) = λ8 Cov(z1,t , σt2 ) 6= 0. On the other hand, the rank of Cs is greater or
equals to N and equals N if and only in its last column belongs to the sub-space spanned by the N first
2
2
columns. This happens only if −λ3 EY1,t+1
(−Ez1,t ) − λ3 Ez1,t Y1,t+1
= 0 i.-e. Cov(z1,t , σt2 ) = 0 which is impossi³
´
0
ble by assumption. Thus Cs if of rank N +1. As a result the rank of ∂/∂φ02 [Ezt ⊗g(Yt+1 , Yt+2 , φ02 )] is N +3 ¤
Proof of proposition 5.2: For l ¡= 2, there¢is nothing to do from the hypothesis. For l ≥ 3, from Proposition
4
4.2, it is sufficient to show that E σt+l−1
|Jt = hl1 + hl2 σt2 + hl3 σt4 with hli , hl2 and hl3 ∈ R.
¢
¡ 4
2
|Jt = A1 +A2 σt2 +A3 σt4
|Jt ) = α+β σt2 +δ σt4 implies E σt+1
Since (ft ) follows a SR-SRAV(1)¡model, V ar(σt+1
¢
4
2
4
(A1 , A2 and A3 ∈ R). Hence, E σt+l−1
|Jt+l−2 = A1 + A2 σt+l−2
+ A3 σt+l−2
.
We will get the expected result by a backward iteration of the last equality:
4
E(σt+l−1
|Jt ) =
2
4
A1 + A2 E(σt+l−2
|Jt ) +A3 E(σt+l−2
|Jt )
{z
}
|
≡Et,l−2
=
¡
¢
4
A1 + A2 Et,l−2 + A3 A1 + A2 Et,l−3 + A3 E(σt+l−3
|Jt )
=
4
|Jt )
A1 (1 + A3 ) + A2 (Et,l−2 + A3 Et,l−3 ) + A23 E(σt+l−3
=
=
...¡
¢
¡
¢
l−1 4
+ A2 Et,l−2 + A3 Et,l−3 + · · · + Al−2
A1 1 + A3 + A23 + · · · + Al−2
3
3 Et,0 + A3 σt
=
¢
£
¡
+ A2 1 − γ l−2 + γ l−2 σt2 + A3 (1 − γ l−3 + γ l−3 σt2 )
A1 1 + A3 + A23 + · · · + Al−2
3
=
¡
¤
l−1 4
2
+A23 (1 − γ l−4 + γ l−4 σt2 ) + · · · + Al−2
3 σt + A3 σt
¢
l−2
A1 1 + A3 + A23 + · · · + A3
µ
µ
l−3
l−2
+A2 1 + A3 + · · · + A3 − γ
1+
µ
+A2 γ
4
|Jt ) =
E(σt+l−1
l−2
1+
A3
γ
hl1 + hl2 σt2 + hl3 σt4 ,
³
+
A3
γ
´2
³
+ ··· +
A3
γ
hl1 , hl2 and hl3 ∈ R¤
41
A3
γ
³
+
´l−2 ¶
A3
γ
´2
³
+ ··· +
4
σt2 + Al−1
3 σt
A3
γ
´l−3 ¶¶