Tax Maximization and Investment Incentives by Means of Accelerated Depreciation 1. Introduction
advertisement

Tax Maximization and Investment Incentives by Means of
Accelerated Depreciation ∗
S.Arkina, A.Slastnikov†
Central Economics and Mathematics Institute, Russian Academy of Sciences, Moscow
1. Introduction
In the paper we propose a model of tax incentives for investment projects with
a help of the mechanism of accelerated depreciation. Unlike the tax holidays
which influence on effective income tax rate, accelerated depreciation affects on
taxable income.
According to the Russian Federation Government’s Decree No.967 from
19.08.1994 enterprises and organizations are granted a right to use accelerated
depreciation for active part of basic production assets. “While putting accelerated depreciation into operation, only straight-line (uniform) method may
be applied, and statutory annual depreciation rates may be increased by the
accelerated coefficient not greater than 2. The necessity of the greater accelerated depreciation must be agreed with financial authorities of the subjects of
Russian Federation.”
In modern economic practice the regions actively use for an attraction of
investment into the creation of new enterprises such mechanisms as accelerated
depreciation and tax holidays.
The problem under our consideration is the following. Assume that the state
∗
†
This work is supported by Russian Foundation for Humanities (project No. 01–02–00415)
For correspondence – e-mail: slast@cemi.rssi.ru, fax: 7(095)718-9615
1
(region) is interested in realization of a certain investment project, for example,
the creation of a new enterprise. In order to attract a potential investor the
state decides to use a mechanism of accelerated depreciation. The following
question arise. What is a reasonable principle for choosing depreciation rate?
From the state’s point of view the future investor’s behavior will be rational. It
means that while looking at economic environment the investor choose such a
moment for investment which maximizes his expected net present value (NPV)
from the given project. For this case both criteria and “investment rule” depend on proposed (by the state) depreciation policy. For the simplicity we will
suppose that the purpose of the state for a given project is a maximization of
a discounted tax payments into the budget from the enterprise after its creation. Of course, these payments depend on the moment of investor’s entry
and, therefore, on the depreciation policy established by the state.
We should note that tax privileges (in corporate income tax) issued from
the depreciated policy are related to a given project, not personal investor.
Thus, choosing a depreciation policy the state can combine (in principle) both
fiscal and incentive functions of Russian tax system. An investigation of the
conditions for such a combination is one of the main purposes of the given
paper.
Our approach is based on a model of the interaction between the state and
investor under uncertainty. Similar model was proposed by authors in [1]–[3]
for study of tax holidays mechanism. These models consist of three main parts:
description of an investment project as a random cash flow embedded into actual tax system; description of the behavior of potential investor (investment
waiting model); and description of the behavior of the state choosing by certain criteria parameters of the relevant tax incentives. Note that the model
describing behavior of investor who chooses optimal timing moment while looking at random economic environment (geometric Brownian motion) was firstly
proposed by McDonald and Siegel [4] (see also [5]).
2
The paper is organized as follows. Section 2 provides a formal description
of the model of the interaction between the state and investor, gives the basic
depreciation methods allowable by Russian tax system, formulates main assumptions. In our model we take in account Law of the Russian Federation
No.62 from 31.03.1999 concerning the exemption from corporate income tax for
new created enterprises within the payback period but not greater than three
years. In Section 3 we investigate this model (Theorem 1) and give explicit
dependencies of investor’s NPV and expected tax payments on parameters of
the model. The main result of this Section (and the whole paper) is a derivation of optimal depreciation policy which maximizes expected discounted tax
payments into the budget.
2. Description of the Model
2.1. General Scheme
It will be considered a project of creation of a new enterprise (in production)
in a certain region of a country as an object of investment.1 Investments I,
necessary for the project are considered to be instantaneous and irreversible,
so that they can not withdrawn from the project and used for other purposes
after the project was started (sunk costs).
One can think of an investment project as a certain sequence of costs and
outputs expressed in units (the technological description of the project). For
this reason while looking at the current prices on both input and output, the
investor can evaluate the cash flow from the project. The most important
feature of the model is the assumption that at any moment the investor can
either accept the project and start with the investment, or delay the decision
before obtaining new information on its environment (prices of the products,
1
We will refer to a creation of a new enterprise, not the reconstruction of an existing one, because we mean
that a new taxpayer will appear
3
demand, etc.). For example, if someone wish to invest in the creation of a
plant for fuel production, the prices of which increase, it makes sense to delay
the investment in order to receive greater virtual profit (but not for too long
because of the time discount effects).
Suppose that the project is started at the moment τ .
Let the gross income from the project at time t be (xτt , t ≥ τ ), and produc-
tion cost at this moment is equal to ytτ +Aτt , where ytτ is material cost (including
both wages and allowable taxes), and Aτt is depreciation charge. If γ denotes
corporate income tax rate net after tax cash flow of investor at moment t equals
xτt − ytτ − γ(xτt − ytτ − Aτt ) = (1 − γ)πtτ + γAτt ,
where πtτ = xτt − ytτ .
Economic environment can be influenced by different stochastic factors (uncertainty in market prices, demand, etc.). For this reason we consider that the
“profits” (πtτ , t ≥ τ, τ ≥ 0) are described by a family of random processes,
defined in some probability space (Ω, F , P) with the flow of σ-fields (Ft , t ≥ 0).
Ft can be considered as available information on the system up to the moment
t, and random variables πtτ are supposed Ft -measurable.
According to current Russian laws newly created enterprises are exempted
from corporate income tax for some time after its creation (tax holidays). Let
ν be a duration of such tax holidays.
The expected present value of investor from the project discounted to the
investment moment is written by the following formula
Vτ = E
τZ+ν
τ
πtτ e−ρ(t−τ ) dt +
Z∞
τ +ν
[(1 − γ)πtτ +
¯
¯
¯
,
γAτt ]e−ρ(t−τ ) dt¯¯¯ Fτ
¯
(1)
where ρ is the discount rate, and the notation E(·|Fτ ) stands for the conditional
expectation provided the information about the system until the moment τ .
4
At the same time we can calculate the tax payments into the budget that
can be made by the project after investment. The expected tax payments from
the firm into the budget discounted to the moment τ are equal to
Tτ = E
Z∞
τ +ν
γ(πtτ − Aτt )e−ρ(t−τ ) dt
¯
¯
¯
¯
¯ Fτ ,
¯
¯
(2)
that is the tax on cumulative discounted taxable income from the project started
at the moment τ .
2.2. Depreciation
We will represent the depreciation at moment t for the project launched at
moment τ as Aτt = Kat−τ , where K is initial depreciation base, and (at , t ≥ 0)
is the deterministic depreciation flow such that
at ≥ 0,
Z ∞
0
at dt = 1.
(3)
This scheme contains various depreciation methods (in continuous time)
which are used in reality. Some of them are described below.
1. Straight-line method (SL).
If L is a useful life of the asset, and λ = 1/L, then
λ, when 0 ≤ t ≤ L
0, when t > L
at =
(4)
2. Declining-balance method (DB).
According to this method the flow of depreciation charges at any time is
calculated as a fixed proportion of the net of amortization cost of assets. Thus
at the moment of time t after the beginning of the assets exploration the
following relation holdsÃKat Z = ηK!
t , where η is an instantaneous depreciation rate, and Kt = K 1 −
t
0
as ds is a book value of assets. This implies
5
Ã
at = η 1 −
Z t
0
!
as ds , therefore ȧt = −ηat , i.e.
at = ηe−ηt .
(5)
For this method the book value of assets at the moment t is Kt = Ke−ηt and
the sum of depreciation charges at the interval (t, t + ∆) is equal to χKt where
χ = 1 − e−η∆ does not depend on the moment t.
3. Sum-of-years-digits method.
According this method assets are depreciated with linear decreasing rate. If
L is a useful life of the asset then
(L − t)/M, when 0 ≤ t ≤ L
0,
at =
where M =
Z L
0
when t > L
(6)
t dt = L2 /2 is an analogue of “sum of years digits” during the
useful life for continuous time.
There are, of course, another methods embedding into above scheme. Such
is, for example, a combination of DB and SL methods when for a certain period
of time the depreciation charges are computed by declining-balance, and then
the residual value of an asset is depreciated by straight-line method.
2.3. Purposes of the Participants
Active participants of the model, which pursue their own interests are the investor and the state.
The purpose of the investor is to find a moment for investment (the rule
of investing), which depends on previous (but not future) observations of the
environment, so that its net present value (NPV) will be maximal within given
tax system, i.e.
6
E (Vτ − I) e−ρτ → max
,
τ
(7)
where E = E(·|F0 ) is the sign of an expectation (provided the known data
about the system at moment t = 0), and maximum is considered over all the
“investment rules”, i.e. moments τ , depending only on observations of the
environment up to this moment (the Markovian moment, i.e. such that an
event {τ ≤ t} belongs to σ-algebra Ft for all t).
Let us denote the optimal moment for the investment (investment rule) in
the problem (7) under given depreciation flow D = (at , t ≥ 0) as τ ∗ (D).
The state can have many motives for the attraction of the investor, other
than the purely fiscal (such as increase in employment, improvements in infrastructure, etc.). However, in this paper we will focus on the fiscal interest
of the state. Namely, knowing the optimal behavior of the investor (optimal
investment rule in (7)), the state will try to choose such depreciation policy
that maximizes discounted tax payments from this project into the budget over
all D from a given set of available depreciation flows D
³
E Tτ ∗ (D) e−ητ
∗
(D)
´
→ max,
D∈D
(8)
where Tτ is determined by the formula (2).
Let D ∗ be optimal depreciation flow for this project, i.e. solution of the
problem (8) (if it exists).
The interaction of the investor and the state can be interpreted from the
game-theoretical point of view. One player (investor) chooses the optimal strategy (moment for investment) depending on the strategy of the other player
(depreciation flow, established by the state), and the other player, who knows
the optimal reply of the first one, chooses his own strategy which maximizes
his gain. In this situation “the state” is the dominant player and the pair
(D∗ , τ ∗ (D ∗ )) can be viewed as a Stackelberg equilibrium (see, for example, [6])
in the game “state–investor”.
7
2.4. Main Assumptions
The amount of investment I is constant (in time).
We assume that initial depreciation base is a fixed share of total amount of
investment, i.e. K = ψI where 0 ≤ ψ ≤ 1.
Investor’s cash flow at moment t after investment (started at moment τ ) is
described by the following stochastic equation:
πtτ
= πτ +
Zt
τ
πsτ (α ds + σ dws ),
t ≥ τ,
(9)
where α and σ are real numbers (σ ≥ 0), (ws , s ≥ 0) is a standard Wiener
process (Brownian motion), and the process (πt , t ≥ 0) is specified by the
equation
πt = π0 +
Zt
πs (α ds + σ dws ),
t ≥ 0,
0
with given initial state π0 , or, equivalently (by Ito formula),
σ2
πt = π0 exp{(α − )t + σwt },
2
t ≥ 0.
(10)
We consider that watching the current prices on both input and output,
the investor can evaluate the initial cash flow from the project πτ = πττ before
investment will be made. So we will refer to the process (πt , t ≥ 0) as “virtual”
profits process. We assume also that the investor takes his decisions on the
project observing the virtual profits. Thus it is natural to consider that σ-field
Ft is generated by the values of the process πs up to the moment t, i.e. Ft =
σ(πs , 0 ≤ s ≤ t). Knowing the information about virtual profits investor can
calculate (see formula (1)) the present value from the project provided it would
be started at that moment.
As one can see from formulas (9) and (10) both “virtual profits” process
(πt , t ≥ 0) and the conditional (regarded Ft ) distribution of “real profits” πtτ
are geometric Brownian motion with parameters (α, σ). The hypothesis of
8
geometric Brownian motion is typical for many financial models (in particular,
real options theory). As it was noted (see, e.g. [3]) such a hypothesis follows
from a general assumptions about stochastic process (independence, homogeneity, continuity). The parameters of the geometric Brownian motion α and σ
have a natural economic interpretation, namely, α is an expected instantaneous
rate of profits change; σ 2 is an instantaneous variance of rate of profits change
(volatility of the project).
We should emphasize, that the expected rate of profits change does not have
to be positive. Negative α means that profits flow decreases with time (on
average); and when α = 0 it changes around the initial mean.
Now we can write the explicit formulas for investor’s Present Value (1) and
tax payments into the budget (2). We have
E(πtτ | Fτ ) = πτ eα(t−τ ) ,
Vτ =
τZ+ν
τ
E(πtτ |
Z∞
+ γK
τ +ν
Fτ )e
−ρ(t−τ )
dt + (1 − γ)
at−τ e−ρ(t−τ ) dt = πτ
+ (1 − γ)πτ
Z∞
e
dt + γK
0
1 − γb
+ γKA,
= πτ
ρ−α
Tτ = γ
= γ
Z∞
Z∞
τ +ν
E(πtτ | Fτ )e−ρ(t−τ ) dt
e−(ρ−α)t dt
Z∞
ν
at e−ρt dt
where γb = γe
−(ρ−α)ν
,
A=
Z∞
ν
at e−ρt dt;
(11)
(E(πtτ | Fτ ) − Aτt ) e−ρ(t−τ ) dt
τ +ν
Z∞ ³
τ +ν
Ã
Zν
0
−(ρ−α)t
t ≥ τ.
´
πτ eα(t−τ ) − Kat−τ e−ρ(t−τ ) dt
!
πτ −(ρ−α)ν
= γ
e
− KA .
ρ−α
9
(12)
From these formulas one can see that both Present Value of the investor and
cumulative tax payments into the budget which define the criteria in behavior
of the participants (7) and (8) depend only on discounted depreciation shares
A (not on the whole depreciation flow D).
3. Investigation of the Model
In this section we provide a solution of the model formulated above. As it
turned out, it can be obtained in an explicit (analytical) form.
3.1. Solution of the Investor Problem
The problem which the investor faces is an optimal stopping problem for the
stochastic process. The relevant theory is well developed (see, for example, [7]),
but there are very few problems which have a solution in an explicit form, and
problem (7) belongs to this type.
Let β be a positive root of the quadratic equation
1 2
(13)
σ β(β − 1) + αβ − ρ = 0.
2
We should point out that β > 1 whenever ρ > α. If σ = 0, then β = ρ/α
whenever α > 0, and there is no positive root of the equation (13) whenever
α ≤ 0, but we find it convenient to consider β = ∞.
Let us denote k = β/(β − 1).
Theorem 1. Let the virtual profits from the project (πt , t ≥ 0) evolved
according to the geometric Brownian motion (10), and ρ > α.
Then the optimal moment for the investment is
τ ∗ (D) = min{t ≥ 0 : πt ≥ π ∗ (D)}2 ,
2
If a set of such t is empty, then put τ ∗ (D) = ∞
10
(14)
Z ∞
ρ−α
−(ρ−α)ν
b
where π (D) = (1 − γψA)π̃, π̃ = k
, A=
at e−ρt dt.
I, γ = γe
ν
1 − γb
∗
This theorem shows that the optimal moment for the investment begins
when the virtual profit achieves a critical level π ∗ (D). Formulas of this type
(for the case of geometric Brownian motion) are given in [4], [5] (for a more
simple model of the investor) and for a close model in [1], [3].
One can look at formula (14) from another point of view.
Using equality (11) for the investor’s Present Value Vτ one can see that
Vτ − I =
1 − γb
πτ − (1 − γψA)I.
ρ−α
Applying known results on the optimal stopping for geometric Brownian
motion we have that the optimal moment for the investment equals to the first
moment when the Profitability Index for the project Vτ /I achieves threshold
level q = k(1 − γψA) + γψA (which is greater than one). Detailed analysis
of this phenomenon and its connection with the known Jorgenson rules and
Tobin’s ratio q can be found in [5].
In order to avoid trivial moment of investment τ ∗ (D) = 0, we will further
suppose that the initial value of the virtual profit π0 satisfies π0 < π ∗ (D).
The optimal moment for the investment τ ∗ (D) is not always finite. If parameters of the process are such that α < σ 2 /2, then with the positive probability
1 − exp{(1 − 2α/σ 2 ) log(π0 /π ∗ (D))}, the project can remain non-invested; if the
expected rate of profits change is large enough regarded its volatility, α ≥ σ 2 /2,
then the project will be invested in (with the probability one)3 .
If we know the optimal moment for the investment, we can find the expected
optimal net income for the investor as well as the relevant expected tax payments from the project into the budget. Let us denote the expected discounted
net income of the investor under the condition of optimal behavior (i.e. max³
imal value of the function in (7)) as V(D), and let T (D) = E Tτ ∗ (D) e−ρτ
3
Similar formulas for a close model see, for example in [3, p.23]
11
∗
(D)
´
be the discounted tax payments into the budget under the optimal behavior.
Theorem 2. Let the virtual profits from the project (πt , t ≥ 0) be a process
of geometric Brownian motion (10), and ρ > α. Then, the following formulas
hold:
1) V(D) = (1 − γψA)
−β+1
b
2) T (D) = γ(1
− γψA)
−β
Ã
π0
(k − 1)
π̃
Ã
π0
π̃
I,
!β Ã
1
π ∗ (D)
3) Eτ (D) =
log
α − σ 2 /2
π0
∗
!β
!
1 − γψA γψA
−
k
I,
1 − γb
γb
σ2
if α > ,
2
∗
Eτ (D) = ∞
σ2
if α ≤ ,
2
where π ∗ (D) and π̃ are defined in Theorem 1.
This theorem is proved analogously to [3, Theorem 2] using formulas (11)–
(12).
3.2. Solution of the State Problem: Optimal Depreciation Flow
In this Section we find an optimal depreciation flow D = (at , t ≥ 0) that
provides maximal expected discounted tax payments from the project into the
budget.
Let D be a given set of all available (for the state control) depreciation flows
D, A be a discounted depreciation (as it is defined in (11)) after tax holidays
A = A(D) =
Z∞
ν
at e−ρt dt,
and
min A(D) = A,
D∈D
max A(D) = Ā.
4
D∈D
We assume that the set of available depreciation flows is enough “rich” and
A in the following sense.
4
If min and/or max are not attained for some sets D, one can say about inf and/or sup
12
(C1) For any value a, A < a < Ā there exists depreciation flow D ∈ D
such that A(D) = a.
In other words, set {a : a = A(D), D ∈ D} will be the interval [A, Ā].
As one can see from Theorem 2 the expected discounted tax payments from
the project into the budget under optimal behavior of the investor can be written as follows
Ã
π0
b
T (D) = γg(u)
π̃
!β
I,
where u = γψA,
Ã
!
1−u u
k
.
(15)
g(u) = (1 − u)
−
1 − γb γb
Thus the problem of finding an optimal depreciation policy by the state (see
−β
Section 2.3)
T (D) → max,
D∈D
is reduced (due to formula (14)) to a more simple problem of maximization of
a function at some interval, namely,
g(u) → max,
where u = γψA,
u ≤ u ≤ ū,
(16)
ū = γψ Ā.
We have from relation (15)
0
g (u) =
=
G(u) =
=
=
Ã
!
Ã
k
1
1−u u
−
+
β(1 − u)
k
− (1 − u)−β
1 − γb γb
1 − γb γb
(1 − u)−β−1 G(u),
Ã
!
Ã
!
k
1
1−u u
β k
−
+
− (1 − u)
1 − γb γb
1 − γb γb
u 1−u
1−u
−β −
(β − 1)k
1 − γb
γb
γb
Ã
!
1−u
1−u u
γb − u
1−u
β
−
−
=β
−
.
b
b
1 − γb γb
γb
γ(1
− γ)
γb
−β−1
!
b − (β − 1)/γ
b < 0.
G(u) is decreasing function since G0 (u) = −β/(1 − γ)
13
(17)
(18)
For the work simplification we assume that the following requirement holds.
(C2) ψ Āe(ρ−α)ν < 1.
This condition is obviously valid when tax holidays are absent (ν = 0). Note
that (19) implies γb > u for u ≤ ū.
Let us pass to solving the maximization problem (16). Let u∗ denote an
optimal solution in (16).
If G(u) ≤ 0 then G(u) ≤ 0 whenever u > u, and due to (17) g(u) decreases
in u, therefore u∗ = u. Formula (18) and condition (C2) imply that G(u) ≤ 0
is equivalent to
β≤β=
1−u
1 − γb
1 − γψA
1 − γb
·
=
·
.
γb
1 − u/γb
γb
1 − ψAe(ρ−α)ν
(19)
Similarly one can obtain that G(u) > 0 whenever u ≤ ū is equivalent to
β ≥ β̄ =
1 − γb
1 − ū
1 − γb
1 − γψ Ā
.
·
=
·
γb
1 − ū/γb
γb
1 − ψ Āe(ρ−α)ν
(20)
Hence, in this case g(u) increases in u, and therefore, u∗ = ū.
If β < β ≤ β̄ then g(u) attains maximum at the point u∗ such that G(u∗ ) = 0,
and
Ã
!
β γb − 1 + γb
1 − γb
b .
= γb β −
u =
/(β − 1 + γ)
β − 1 + γb
γb
Collect the above results we have the following
∗
(21)
Theorem 3. Let conditions (C1)–(C2) hold. Then depreciation flow D ∗ =
(a∗t , t ≥ 0) is optimal if and only if the discounted depreciation flow A∗ =
Z∞
ν
a∗t e−ρt dt satisfies the following relations
14
A,
when β ≤ β
b
b
b
A∗ = γ · β − (1 − γ)/γ , when β < β ≤ β̄
γψ
β − 1 + γb
Ā,
when β > β̄
where boundaries β and β̄ are defined in (19) and (20) respectively.
Now we give the relevant results for the major classes of depreciation methods, specified in Section 2.2.
In further we will consider the case when tax holidays are absent, i.e. ν = 0.
For the straight-line method with depreciation rate λ (see (4)) we have
A = ASL (λ) =
´
λ³
1 − e−ρ/λ .
ρ
Note that ASL (λ) is increasing (in λ) function. We can also put ASL (0) = 0,
ASL (∞) = 1.
Assume that available depreciation rates have to place between two boundaries λ and λ̄, i.e. 0 < λ ≤ λ ≤ λ̄ < ∞. As one can easy see the conditions
(C1)–(C2) are valid for this case. Let us denote
β SL =
1 − γ 1 − γψASL (λ)
·
,
γ
1 − ψASL (λ)
β̄ SL =
1 − γ 1 − γψASL (λ̄)
·
.
γ
1 − ψASL (λ̄)
Corollary 1. An optimal depreciation rate λ for SL method under restrictions λ ≤ λ ≤ λ̄ has the following form
λ,
λ∗ = λ̃,
λ̄,
when β ≤ β SL
when β SL < β ≤ β̄ SL
when β > β̄ SL
15
Ã
!
1−γ
where λ̃ is a root of the equation ψA (λ) = β −
/(β − 1 + γ)
γ
SL
For the declining-balance method described in Section 2.2 (see formula (5))
we have
A = ADB (η) =
η
.
ρ+η
The function ADB (η) also increases (in η).
If there are certain restrictions on depreciation rate η ≤ η ≤ η̄, then (C1)–
(C2) are also satisfy. Similar to previous consideration let us denote
β
DB
1 − γ 1 − γψADB (η)
·
,
=
γ
1 − ψADB (η)
β̄
DB
1 − γ 1 − γψADB (η̄)
·
.
=
γ
1 − ψADB (η̄)
Corollary 2. An optimal depreciation rate η for DB method under restrictions η ≤ η ≤ η̄ is the following
η,
∗
∗
η ∗ = ρb /(1 − b ),
Ã
η̄,
when β ≤ β DB
when β DB < β ≤ β̄ DB
when β > β̄ DB
!
1
1−γ
where b =
β−
/(β − 1 + γ).
ψ
γ
∗
3.3. Positivity of Taxable Income in Average
In previous Section where we derive an optimal depreciation flow we took into
account some exogenous restrictions at the depreciation rate. However, there is
restrictions which follows from the model itself, and one of these will be consider
in this Section.
It is well known that underdeclaration of income in order to escape from
the taxes is often announce as illegal and is punished by tax authorities. As a
16
minimal requirement to avoid this situation we will consider a positivity (nonnegativity) of the taxable income in average: E(πtτ | Fτ ) − Aτt ≥ 0 (a.s.) at
any moment after investment t ≥ τ (briefly in further, PTIA condition). This
implies the following condition
πτ eαt ≥ ψIat ,
t ≥ 0 (a.s.).
Applying Theorem 1 for the value of πτ at optimal investment moment we
have the relation
ρ − α αt
(22)
e ≥ ψat , t ≥ 0.
1−γ
We will study which restrictions are induced by (22) for the major depreci(1 − γψA)k
ation schemes — DB and SL methods.
1. DB method
For this case at = ηe−ηt ,
A = η/(ρ + η), and (22) can be rewritten as
follows
Ã
!
η
ρ−α
.
1 − γψ
Be(α+η)t ≥ ψη, where B = k
ρ+η
1−γ
The latter inequality holds for any t ≥ 0 if and only if two following conditions are valid:
α + η ≥ 0,
Ã
or η ≥ −α,
!
(23)
η
B ≥ ψη.
(24)
ρ+η
We should note that (23) is nonsignificant restriction and fulfills as a rule in
1 − γψ
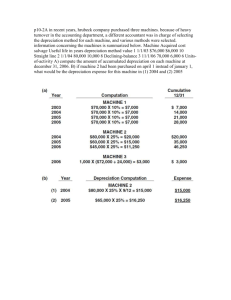
practice. As for another inequality that (24) will be valid for η ≤ η0 (see Figure
1) where η0 is a root of the quadratic equation
Ã
!
η
1 − γψ
B = ψη.
ρ+η
17
(25)
6
ψη
µ
B 1−
η
γψ ρ+η
¶
η0
0
-
η
Figure 1:
Moreover, since B is decreasing (in β) function then (24) implies that η0
decreases in β.
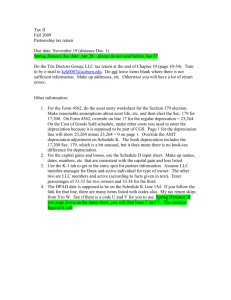
Thus under the PTIA condition the optimal depreciation rate for DB method
equals to η ∗∗ = min(η ∗ , η0 ) where η ∗ is defined in Corollary 2, and η0 is a root
of the equation (25) — PTIA-optimal DB depreciation rate. Graphs of η ∗ , η0
and η ∗∗ as functions of β are displayed at Figure 2.
2. SL method
For this case we have: for some λ > 0
λ, when 0 ≤ t ≤ 1/λ
at = 0, when t > 1/λ
and A =
´
λ³
1 − e−ρ/λ .
ρ
Now the relation (22) can be written in a following way
"
#
´
λ³
ρ − α αt
e ≥ ψat , for all t ≥ 0.
1 − γψ 1 − e−ρ/λ k
(26)
ρ
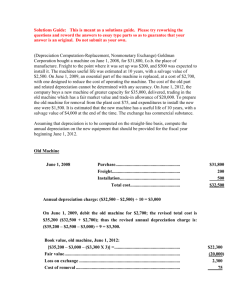
1−γ
An investigation of this inequality will be carried out separately for the cases
of negative and non-negative exponent α — see Figure 3.
18
6
η̄
η0
η∗
η ∗∗
η
-
β
Figure 2:
6
α≥0
α<0
λ
-
0
1/λ
t
Figure 3:
19
6
6
ψλ
h(λ)
h(λ)
a)
ψλe−α/λ
b)
-
λ0
-
λ0
λ
λ
Figure 4:
If α ≥ 0 then (26) will be hold when
"
h(λ) ≥ ψλ,
#
´
λ³
ρ−α
,
where h(λ) = 1 − γψ 1 − e−ρ/λ k
ρ
1−γ
(27)
and the latter inequality will be valid whenever λ ≤ λ0 where λ0 is a root of
the equation h(λ) = ψλ (see Figure 4a).
If α < 0 then inequality (26) will be valid if and only if when
h(λ)eα/λ ≥ ψλ,
or h(λ) ≥ ψλe−α/λ ,
and, therefore, whenever λ ≤ λ0 where λ0 is a root of the equation h(λ) = ψλe−α/λ
(see Figure 4b).
Finally, combining these two cases we get that a restriction at depreciation
rate λ for SL method which provides PTIA condition has the form λ ≤ λ0
where λ0 is a root of the equation
"
#
´
λ³
ρ − α min(0,α)/λ
e
1 − γψ 1 − e−ρ/λ k
= ψλ.
(28)
ρ
1−γ
Taking into account this restriction one can see that the optimal depreciation
rate λ for SL method under PTIA condition will be λ∗∗ = min(λ∗ , λ0 ) where λ∗
is specified in Corollary 1 — PTIA- optimal SL depreciation rate.
20
We should point out that instead of positivity of taxable income in average
one can consider a more strict condition: expected value of taxable income at
any moment after investment is no less than a given positive value. In this way
it is not difficult to obtain the relevant modifications of the relations (22)–(27)
and the corresponding restrictions for depreciation rate in SL- and DB methods.
4. Some Numeric Examples
In this Section we calculate optimal depreciation rates in some examples using
adjusted real data. As reasonable sets of the parameter values, we will consider
(similar as in [8],[3]) investment projects with expected growth rate varying
from -3% to 3%, volatility σ ∼ 0.1 ÷ 0.2, and discount rate ρ from 10% to
20% (all parameters here and further will be annual). Let us remember that
corporate income tax in Russia γ is equal now to 30%.
In the Tables below we provide some values of optimal depreciation rates
for SL and DB methods under various combinations of parameters α, σ, ψ
and ρ. For the simplicity we use Corollaries 1 and 2 with trivial restrictions:
λ = η = 0, λ̄ = η̄ = ∞. So, λ∗ will denote the optimal SL depreciation rate from
Corollary 1, and λ0 — the corresponding PTIA condition (a root of equation
(28)). As for DB method we shall consider annual optimal depreciation rate
∗
χ∗ = 1 − e−η where η ∗ is taken from Corollary 2. As we pointed out in Section
2.2, this rate can be considered as a share of a book value of an assets which
has been depreciating during a unit period of time (year). Respectively, χ will
be denote the associated PTIA condition, i.e. χ0 = 1 − e−η0 where η0 is a root
of equation (25).
Table 1 shows the dependence of the annual optimal depreciation rates λ∗
and χ∗ as well as appropriate PTIA conditions λ0 and χ0 on the expected growth
rate in profits (α). Volatility of the project is taken as σ = 0.15, discount rate
is equal to 15%, and share of initial depreciation base in total amount of in21
vestment ψ = 0.8.
Table 1
Exp.rate of growth
α
Optimal SL
λ∗
PTIA SL
λ0
Optimal DB
χ∗
PTIA DB
χ0
-3%
0.48
0.28
0.60
0.28
-2%
0.33
0.28
0.46
0.27
-1%
0.24
0.28
0.35
0.26
0%
0.17
0.29
0.26
0.26
1%
0.12
0.28
0.18
0.25
2%
0.08
0.27
0.12
0.25
3%
0.05
0.27
0.07
0.24
We emphasize at this and other tables by a boldface font the minimum
of optimal depreciation rate and relevant PTIA condition (i.e. PTIA-optimal
depreciation rate).
As one can see from this table, the optimal depreciation rate for the projects
with low expected growth rate α should be enough high that coflicts with positivity of expected taxable income. Thus, for such a project PTIA condition
has a crucial role. When expected growth rate in profits increases optimal
depreciation rate decreases and begins satisfy PTIA condition.
The next table illustrates the dependence of the same indicators on the share
of initial depreciation base in total amount of investment ψ. We take the project
with parameters α = 0,
σ = 0.15 and discount – 15%.
22
Table 2
Share of deprec. assets
ψ
Optimal SL
λ∗
PTIA SL
λ0
Optimal DB
χ∗
PTIA DB
χ0
1
0.10
0.22
0.16
0.21
0.9
0.13
0.25
0.19
0.23
0.8
0.17
0.29
0.26
0.26
0.7
0.26
0.33
0.38
0.29
0.6
0.60
0.40
0.67
0.33
0.5
∞
0.49
1.00
0.39
Increasing of optimal depreciation when ψ decreases is a simple consequence
of Corollaries 1 and 2. Let us remember that we consider the case when upper
boundaries λ̄, η̄ for depreciation rates are absent (or, equal to infinity). Thus,
value ∞ in the table means that β belong to the domain {β > β̄} and the
optimal depreciation rate will coincide with upper restriction λ̄.
Table 3 demonstrates the dependence of the above mentioned indicators both
on the discount ρ and expected growth rate in profits α. As in previous tables
we put volatilityσ = 0.15 and share ψ = 0.8.
23
Table 3
Discount
ρ
Optimal SL
λ∗
PTIA SL
λ0
Optimal DB
χ∗
PTIA DB
χ0
(α = −3%)
10%
0.28
0.20
0.35
0.21
15%
0.48
0.28
0.60
0.28
20%
0.87
0.37
0.81
0.34
10%
0.07
0.20
0.11
0.19
15%
0.17
0.29
0.26
0.26
20%
0.32
0.37
0.44
0.33
10%
0
0.18
0
0.17
15%
0.05
0.27
0.07
0.24
20%
0.13
0.39
0.19
0.30
(α = 0%)
(α = 3%)
We should note that optimal annual DB depreciation rates χ∗ are equal to
about 1.5 times of corresponding SL depreciation rates, as it established in tax
systems of Australia and, partially, France and Spain (the data are taken from
[9]).
References
[1] Arkin V.I., Slastnikov A.D. Waiting to invest and tax exemptions // Working Paper WP/97/033. ., CEMI Russian Academy of Sciences, 1997.
[2] Arkin V.I., Slastnikov A.D. Tax incentives for investments into Russian
economy // Working Paper WP/98/057. ., CEMI Russian Academy of
Sciences, 1998.
[3] Arkin V., Slastnikov A., Shevtsova E. Tax incentives for investment
projects in the Russian economy. Working Papers Series No 99/03. Moscow:
24
EERC, 1999.
[4] McDonald R., Siegel D. The value of waiting to invest // Quarterly Journal
of Economics. 1986. V.CI. No.4.
[5] Dixit A.K., Pindyck R.S. Investment under Uncertainty. Princeton: Princeton University Press, 1994.
[6] Aubin J.- P. Nonlinear analysis with economic applications. Moscow: Mir,
1988.
[7] Shiryaev A.N. Statistical sequential analysis. Moscow: Nauka, 1969
[8] McDonald R. Real options and rules of thumb in capital budgeting. In:
M.J.Brennan and L.Trigeorgis, eds. Project Flexability, Agency, and Competition (New Developments in the Theory and Application of Real Options). Oxford University Press, 1999.
[9] Cummins J.G., Hassett K.A., Hubbard R.G. Tax reforms and investment:
A cross-country comparison // Journal of Public Economics. 1996. V.62.
No.3.
25