Parameters that Affect the Digging of a BiologicallyInspired Underwater Borrowing Robot
ARC-HVE
MAssACHU TTF ISTITI IToE
by
OF TECHNULOLGY
JUN 2 4 2015
Steven Paul Guitron
Submitted to the Department of Mechanical Engineering
in Partial Fulfillment of the Requirements for the Degree of
Bachelor of Science in Mechanical Engineering
LIBRARIES
at the
MASSACHUSETTS INSTITUTE OF TECHNOLOGY
June 2015
0 2015 Massachusetts Institute of Technology. All Rights Reserved.
redacted
Author..................Signature
Department
Mechanical Engineering
May 18, 2015
Certified by ................
Signature redacted
Daniel S. Dorsch
Ph.D. Student in Mechanical Engineering
Certified by .........
Signature redacted.
Amos oi Wider, V
Assistant Professor of Mechanical Engineering
Accepted by .........
Signature redacted
Anette Hosoi
Professor of Mechanical Engineering
Undergraduate Officer
MITLibraries
77 Massachusetts Avenue
Cambridge, MA 02139
http://Iibraries.mit.edu/ask
DISCLAIMER NOTICE
Due to the condition of the original material, there are unavoidable
flaws in this reproduction. We have made every effort possible to
provide you with the best copy available.
Thank you.
The images contained in this document are of the
best quality available.
Parameters that Affect the Digging of a Biologically-Inspired
Underwater Borrowing Robot
by
Steven Paul Guitron
Submitted to the Department of Mechanical Engineering
on May 18, 2015 in Partial Fulfillment of the
Requirements for the Degree of
Bachelor of Science in Mechanical Engineering
Abstract
RoboClam 2 is a device that burrows based on the movement of the Atlantic razor clam. A functional
RoboClam 2 has been built. Testing was conducted in a controlled laboratory environment to
determine what parameters of the device and its operation affect its ability to dig both speedily,
deeply, and efficiently. Smaller contraction and dilation volume, heavier device weight, and longer
contractions above a theoretically calculated minimum fluidizing velocity were all found to correlate
with faster digging speed. Future work will involve experimentally determining the minimum
fluidizing velocity and the effect of contraction speed on digging ability.
Thesis Supervisor: Daniel S. Dorsch
Title: Ph.D. Student in Mechanical Engineering
Thesis Supervisor: Amos G. Winter, V
Title: Assistant Professor of Mechanical Engineering
3
4
Contents
1
Introduction
11
2
Modeling RoboClam 2
12
3
2.1
Dynamics of Digging . . . . . . . . . . . . . . . . . . . . .
12
2.2
Minimum Fluidization Velocity . . . . . . . . . . . . . . . .
14
2.3
Energy Consumption. . . . . . . . . . . . . . . . . . . . .
17
Device
17
3.1
Device Specifications . . . . . . . . . . . . . . . . . . . . .
17
3.2
Control Method . . . . . . . . . . . . . . . . . . . . . . .
18
4
Testing Environment
18
5
Experimental Procedure
20
6
Problems during Testing
21
7
Results and Discussion
22
7.1
Contraction Distances and Diameters . . . . . . . . . . . . .
22
7.2
Large versus Small Contraction Diameters . . . . . . . . . . .
23
7.3
Fluidization Time and Digging Speed . . . . . . . . . . . . .
24
7.4
Effect of Downward Force . . . . . . . . . . .. . . . . . . .
26
8
Conclusions
27
9
Future Work
27
5
6
List of Figures
1-1
ROBOCLAM 2. RoboClam 2 is a robot designed to dig through sand in the
ocean by fluidizing the surrounding sand. By fluidizing the soil, RoboClam 2
can save an order of magnitude of energy versus conventional methods of
digging. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2-1
CONTROL VOLUME IN FLUIDIZED ZONE. Ergun's equation can be used
on a small control volume in the fluidized region of RoboClam 2 as its radius
contracts. By solving for the minimum contraction velocity needed to induce
fluidization, we can determine how fast we need to contract to dig
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
effectively.
15
MINIMUM CONTRACTION VELOCITY VS DEPTH. RoboClam 2 must
contract its exterior plates at a minimum velocity to attain fluidization. Using
Ergun's equation, minimum contraction velocity for fluidization can be
calculated from the depth of RoboClam 2 beneath the surface of the
sand . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
16
TESTING ENVIRONMENT. To ensure repeatability and ease of testing, a
laboratory-based testing environment was made. The blue barrel is filled with
sand and water; the sand is able to be fluidized using a pump attached to the
barrel. The end of the piston was attached to RoboClam 2 and was used to
both impart downward force and, using a string potentiometer, record the depth
of RoboClam 2 over time . . . . . . . . . . . . . . . . . . . . . . . . . .
19
DEPTH VS CYCLE FOR DIFFERENT CONTRACTION DIAMETERS. The
large diameter test involved RoboClam 2 cycling between diameters of 62.3 mm
and 66.4 mm. The small diameter test cycled between 58.2 mm and 61.2 mm.
The small diameter test resulted in faster digging because the same weight of
the device is concentrated on a smaller area. Since RoboClamn 2's digging is
primarily inhibited by the sand below the device (when the exterior of the device
is fluidized), a more concentrated force results in more penetration of the sand.
It is currently unknown why the data is so noisy . . . . . . . . . . . . . . .
24
.11
2-2
4-1
7-1
7
7-2
7-3
7-4
DIGGING SPEED VS TIME FLUIDIZED. "Time fluidized" represents the
time that the plates spent moving above the minimal fluidization velocity, which
in our calculation was found to be 15 mm/s. This graph shows that RoboClam
2 needs to move its plate past the minimal fluidization velocity and for a certain
amount of time (around 0.02 s) for the digging speed to be anything
m eaningful. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
25
TOTAL ENERGY EXPENDED UP TO DEPTH VS DEPTH. From the shape
of the graph, as RoboClam 2 digs to deeper depths, it needs exponentially more
energy to continue digging. While this is not a problem with current testing, it
will become a problem when a future iteration of RoboClam is tested at far
greater depths due to the looming energy requirement . . . . . . . . . . . . .
25
DEPTH PER CYCLE AT DIFFERENT DOWNWARD FORCES. Imparting
downward force increased the chance of device failure, which is why the trial
length was shortened as the force was increased. Each trial required around the
same energy per cycle. . . . . . . . . . . . . . . . . . . . . . . . . . . .
26
8
7.1
Examination of Speed to Energy Ratio . . . . . . . . . . . . .
9
.
List of Tables
22
10
1
Introduction
The Atlantic razor clam (Ensis directus) has been studied extensively due to its
ability to dig into soil with an order of magnitude less energy than conventional
methods of digging. This ability comes from the razor clam's ability to fluidize the
soil around it, and as a result, it can dig deeper and more efficiently than if it were
to dig through packed soil [1].
A device that takes advantage of the Atlantic razor clam's method of digging
would be useful in applications such as laying cables or anchoring vessels to the
seafloor. Because of the efficiency of this natural design, this type of device would
be especially useful as an anchor in energy-strapped autonomous underwater vehicles
(AUVs) due to their reliance on batteries and their small size.
The breadth of applications and practicality of the design inspired the biomimetic
devices "RoboClam" and its second iteration "RoboClam 2," which were made to
take advantage of the Atlantic razor clam's energy efficient digging ability. Much
of the theory behind the mechanics of RoboClam has been devised [1]. Using the
current RoboClam 2 model, this theory will be validated through testing in the
laboratory within a controlled sand bed. The goal is to adjust operation parameters
to maximize real life performance of RoboClam 2.
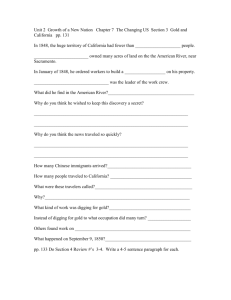
Figure 1-1: ROBOCLAM 2. RoboClam 2 is a robot designed to dig through sand in the ocean by
fluidizing the surrounding sand. By fluidizing the soil, RoboClam 2 can dig with an order of
magnitude less energy versus conventional methods of digging.
11
2
Modeling RoboClam 2
While RoboClam 2's abilities can be tested and verified experimentally, it is still
beneficial to consider different models that describe RoboClam 2's dynamics. If we
find the models to be practically useful after comparing them with experimentally
obtained data, then the models can be used to predict behavior in situations that
were possibly not tested, such as situations that may allow for maximum
performance.
This proves especially useful before testing RoboClam 2 in risky
situations, such as digging so deep that it would be difficult to pull the device out of
the sand without fluidization.
The actual device can be simplified in our model. RoboClam 2 is essentially a
weighted cylinder with an adjustable diameter.
This adjustment is accomplished
using curved plates that conform to the shape of the device.
These plates can be
pulled into or pushed out of the device maintaining a relatively cylindrical profile.
2.1
Dynamics of Digging
As RoboClam 2's radius contracts, a fluidized zone is created around the device,
allowing RoboClam 2 to sink through the fluidized sand like the device would sink
through a liquid. However, RoboClam 2 stops sinking once it reaches a certain depth
in the packed sand below. The depth to which it sinks per contraction is governed
by the weight of the device, the area impacting the sand, the velocity when it hits
the surface of the sand, and the amount of fluidization around the device.
The drag force FD in the fluidized liquid determines the velocity v at which
RoboClam 2 falls into the packed sand and is given as
F IpAC~2
FD
(2.1)
where pP is the density of the water-bead mixture upon fluidization (with an
estimated void fraction of between 40% and 45%), A is the circular cross-sectional
area of RoboClam 2, and CD is the coefficient of drag for the water-bead mixture.
12
The drag coefficient for these types of beads at various void fractions has been
determined experimentally [2].
Conducting a force balance of RoboClam 2 sinking through the medium gives us
M
dv
= (m -
Vp,)g - F
(2.2)
where m is the mass of RoboClam 2 and V is its volume.
Combining (2.1) and (2.2) and solving the differential equation for v allows us to
find the depth the device would fall given complete fluidization of the medium. Using
the parameters of the setup and RoboClam 2, the device would sink about 50 mm
in 0.1 seconds (which is about the time a contraction takes) if fluidized sand was the
only thing hampering RoboClam 2's digging speed.
From this calculation, we can see that the drag force is not the limiting factor in
digging speed (RoboClam 2 digs at about an order of magnitude slower than this
speed). RoboClam 2's digging speed is instead likely governed by the properties of
the packed soil beneath it. The soil at the tip of RoboClam 2 is like the soil at the
surface when RoboClam 2 fluidizes the surrounding soil. The device sinks into the
soil, but once in the packed soil, the device is greatly slowed.
If the cross-sectional area of RoboClam 2 is smaller, then the force from its weight
is more concentrated, resulting in greater stress on the sand below it. This will cause
the sand to fail until a deeper depth, resulting in a greater digging speed. Likewise,
a heavier RoboClam 2 with the same cross sectional area as a lighter RoboClam 2
would be expected to dig faster because of the greater stress imparted on the sand.
This greater stress will cause the device to sink further below in the sand each cycle
based on its own weight.
Theoretically, a heavy RoboClam with a small diameter that could create a
certain minimum plate contraction velocity for the longest possible time would be
ideal.
13
2.2
Minimum Fluidizing Velocity
To dig as efficiently as possible, RoboClam 2 needs to contract its radius within a
specific range of velocities.
If the radius is contracted too quickly, the water and
particles will not have time to move.
If the radius is contracted too slowly, the
fluidized zone will not be created [1].
RoboClam 2 moves down when the sand
around it is fluidized. Therefore, it is necessary to maximize the time that the soil
is fluidized. To do this, the radius of RoboClam 2 would have to be contracted at
the slowest speed that would allow fluidization. This would also allow the device to
use lower power accelerating and decelerating the plates during a contraction. The
speed that RoboClam 2 digs is governed by the time that fluidization is allowed to
occur during each contraction cycle as well as the properties of the sand around and
beneath RoboClam 2.
When RoboClam 2's radius contracts, water is pulled through the beads creating
a void fraction just around the device of about 40% to 45%. Ergun's equation [5]
E3,+ DP
E
23)
AP =
150ov,9AX (1 -
_)2
0
1.75pv, 2 AX (1
+1
2
_
)
describes both laminar and turbulent flow behavior of fluids through packed beds
0
where AP is the pressure drop across the fluidized bed, p is the dynamic
viscosity, V. is the superficial velocity, Ax is the length of the bed, p is the density
of the fluid, DP is the equivalent spherical diameter of the beads, and E is the void
fraction of the bed. Ergun's equation is specified for a tube, but we can describe a
control volume, as in Figure 2-1, and use Ergun's equation as an approximation of
the fluid flow through it.
Contracting the radius faster than the water can accelerate will result in
cavitation [1]. The fluid's maximum velocity is bounded by the contraction velocity
of the radius.
14
Fluidized Zone
Flow direction
P
tdz
d~P
dO
= pgh
Figure 2-1: CONTROL VOLUME IN FLUIDIZED ZONE. Ergun's equation can be used on a
small control volume in the fluidized region of RoboClam 2 as its radius contracts. By solving for
the minimum contraction velocity needed to induce fluidization, we can determine how fast we need
to contract to dig effectively.
The pressure drop across the fluidized bed can be found by examining a control
volume drawn around RoboClam 2, as seen in Figure 2-1. By approximating the
pressure on the plates of RoboClam 2 as negligible during its contraction (a limit
case in which cavitation is just on the verge of happening), the pressure drop would
be the hydrostatic pressure exerted on a segment of the boundary of the control
volume, the surface of the large cylinder that represents the extent of the fluidized
zone around RoboClam 2
d AP = pgh dA = pgz dO dz
(2.4)
where h is the depth of the segment of the control volume. Integrating over z
from the submerged depth of the top of RoboClam 2 to the depth of its bottom
would give the pressure profile for a vertical slice of RoboClam 2; integrating again
around the device would give the total pressure drop needed to solve Ergun's
equation.
15
Alternatively, Ergun's equation can be used on a small segment at the very
bottom of the fluidized region around RoboClam 2.
Since pressure is greatest on
this segment, the most minimal contraction velocity needed for complete fluidization
around RoboClam 2 can be found.
The pressure drop across this small segment is
AP = pgh
(2.5)
Solving Ergun's equation [3] at a depth of 0.05 m gives a minimum velocity for
fluidization of 0.015 m/s.
140
r120
i100
80
RoboClam 2
60
Maximum
Achievable
40
Depth:
323 nun
20
0
100
200
300
400
500
Depth (mm)
Figure 2-2: MINIMUM CONTRACTION VELOCITY VS DEPTH. RoboClam 2 must contract
its exterior plates at a minimum velocity to attain fluidization. Using Ergun's equation, minimum
contraction velocity for fluidization can be calculated from the depth of RoboClam 2 beneath the
surface of the sand.
16
Energy Consumption
2.3
Considering the environments where RoboClam 2 would be used, energy efficiency
is of great importance.
The goal would be to maximize speed and minimize the
energy required to attain that speed, for a period of time it takes to get to a sufficient
depth.
Examining
the
needed
energy,
we
calculate
the
force
during
a
contraction/dilation cycle, given as
F = IKt
(2.6)
where F is the force applied by the actuator, I is the instantaneous current
flowing to the device, and Kt is the motor constant.
Recorded position data was
used to calculate a velocity profile over time for the actuator.
Multiplying the
instantaneous velocity v by (2.6) at the corresponding instantaneous current gives
an expression for the instantaneous power, given as
P = IKtv
(2.7)
We can then integrate the total power curve over time to get the total energy
used to run the trial.
3
Device
3.1
Device Specifications
RoboClam 2 is a cylindrically-shaped device with an adjustable radius.
An interior
Linmot electric linear actuator adjusts the diameter using a wedge system that
translates lateral movement of the actuator to radial movement of the three outer
plates.
When the plates are contracted at a certain speed, the sand is fluidized
around RoboClam 2. The plates conform to the cylindrical shape of the device, and
the gaps between the plates are sealed with silicone.
relatively even fluidization on all sides of the device.
17
This ensures that there is
The device is capable of contracting to a diameter of 55.9 mil and dilating to a
diameter of 68.6 mm. The device contracts at a maximum rate of 54 mm/s. It has
a dry weight of 3.6 kg and a wet weight of 2.4 kg. The device is 0.38 m long.
3.2
Control Method
A MATLAB
script was written to control the linear actuator using serial
commands sent to the motor driver from the computer. The same script was used
to collect data from both the linear actuator
and a Celesco SP2-50
string
potentiometer so that actuator data could be compared with depth data. The end
of the string potentiometer was attached to the posterior of RoboClam 2.
As
RoboClam 2 dug into the sand, the string would extend from the potentiometer,
allowing us to record RoboClam 2's vertical position. The position of the actuator,
the force imposed, as well as the current drawn from the actuator was collected.
Power and logic (such as commanded position) were sent to the actuator via a
waterproof serial cable.
4
Testing Environment
RoboClam 2 would most likely be used in large bodies of water such as lakes or
oceans. Because of the difficulty of finding human-accessible spots where RoboClam
2 can dig repeatedly, a testing environment was constructed to test different
RoboClam models under controlled parameters [4].
A 96 gallon barrel filled with small beads and tap water was used to simulate the
type of environment where RoboClam 2 would be used.
The beads were each
between 0.595 and 0.841 mm in diameter and filled the barrel to a level deep enough
for RoboClam 2 to dig a complete body length without obstruction from the base of
the barrel [1]. The water level was set about a body length above the surface of the
sand, allowing RoboClam 2's exhaust vents to be completely submerged within the
water.
RoboClam 2 was kept vertically upright via a metal rod connected to a piston,
which was used to impart force downward (to aid in digging) as well as upward (to
18
aid in removing RoboClam 2 after a digging test was completed).
The pressure to
the piston was controlled by a pressure regulator, and this allowed us to test
RoboClam 2 under different downward loads.
As RoboClam 2 dug, the piston would extend.
Using a string potentiometer
attached to the piston, the vertical position of RoboClam 2 could be measured.
String
Piston
Potentiometer
Pressure
Regulators
Drain
Cable to
RoboClam 2
Pipes (to
fluidization
system)
Barrel
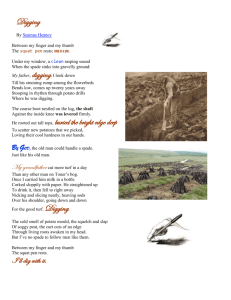
Figure 4-1: TESTING ENVIRONMENT. To ensure repeatability and ease of testing, a laboratorybased testing environment was made. The blue barrel is filled with beads and water; the sand is able
to be fluidized using a pump attached to the barrel. The end of the piston was attached to RoboClam
2 and was used to both impart downward force and, using a string potentiometer, record the depth
of RoboClam 2 over time.
19
To ensure repeatability of tests and to simulate an ocean environment to a greater
degree, the beads were fluidized and the barrel was vibrated before another test was
conducted. Fluidization was done via a pump that accelerated water into the bottom
of the barrel.
The pump was turned on for 30 seconds after each test.
The water
flows through the sand particles, eliminating previous cavities imparted from digging.
Excess water was released through a side drain, located at the top of the barrel, into
a reservoir where the pump circulated it back into the barrel for fluidization.
A
vibration motor was fixed to a frame attached to the base of the barrel. The motor
was activated during fluidization and for at least 30 seconds after the pump was shut
off to further ensure that the beads would be evenly dispersed before a new test could
be conducted.
5
Experimental Procedure
RoboClam 2 was controlled by changing various parameters within a MATLAB
script that communicated with the linear actuator. The parameters "cycles", "speed",
"acceleration", "inward position", and "outward position" were set prior to testing.
The "cycles" parameter defines how many times RoboClam 2 would dilate and
contract; a dilation and contraction each count for one cycle each, so that a
contraction followed by a dilation counts as two cycles. During a cycle, RoboClam
2 dilates to an "outward position" or contracts to an "inward position." The "speed"
parameter
represents
how
fast the dilation and contraction
occur,
and
the
"acceleration" parameter sets the time it takes to get to the defined "speed."
The sand was fluidized for 30 seconds, with the vibration motor remaining on for
another 30 seconds to allow the sand to settle more evenly. RoboClamn 2 was then
lowered slowly until it rested on the sand bed.
RoboClam 2's own weight and
possibly the downward force from lowering the device as well as from the piston
caused RoboClam 2 to rest slightly below the surface of the sand.
The testing procedure was activated, allowing RoboClam 2 to automatically dig.
When the procedure was finished, the piston and rod (attached to RoboClam 2)
20
pulled the device from the sand and water.
The cycle continued as different
parameters were changed and tested.
6
Problems during Testing
While RoboClam 2 operated well without any force imparted upon it, RoboClam 2
faced problems when the downward forces were too great. During a test with 83 N
of force applied to RoboClam 2, the device suddenly stopped operating.
Upon
removal from the sand (during a test, when RoboClam 2 was still receiving
commands from the computer), RoboClam 2 failed to resume.
However, upon
squeezing the side shells of the device, RoboClam 2 suddenly resumed its operation.
Removing the pressure after RoboClam 2 had failed (while RoboClam 2 was still
partially submerged in the sand) did not cause RoboClam 2 to resume.
However,
squeezing the panels of the device again (while it was partially submerged) caused
the device to resume operation.
RoboClam 2 would always fail after an inward stroke (the diameter going from
large to small). In fact, squeezing the device suddenly after failure would cause the
device to resume, no matter what depth RoboClam 2 was submerged.
The most likely reason for this failure is a problem with the actuator controller.
With extra downward force, the controller may not compensate enough for the
current that the actuator may need to get to the commanded "inward position."
Previous calculations based on the capabilities of the actuator estimate the maximum
depth that RoboClam 2 can dig at 0.323 meters [1].
This is not that deep, and in
fact RoboClam may fail if more force is imparted from the top (as this calculation
was made given the weight of RoboClam 2 exclusively). Nevertheless, more analysis
will need to be conducted to figure out what is causing this problem.
If RoboClam 2 failed during a test, resuming the test was attempted so that
digging at deeper depths could be conducted. For some tests, the graph of depth vs.
time has gaps in otherwise sound data.
The recorded data also seemed to be more noisy than expected.
This could be
due to the small distances that the string was being extended during actual tests.
21
Results and Discussion
7
Contraction Distances and Diameters
7.1
Since RoboClam 2 can contract through a large range of diameters, several tests
were conducted to determine the similarities and differences when contracting to a
small diameter versus contracting to a large diameter. It was also of interest to learn
if the difference between the contraction and dilation diameters affected digging
speed or energy efficiency.
All of these tests were conducted with the same
contraction speed and acceleration.
The fastest digging speed, 0.06 mm/s, was obtained by contracting to 56.5 mm
from 62.1 mm. Its speed to energy ratio was only surpassed by trials where there
was less than a 2 mm difference in contraction and dilation diameters. It was also
interesting that contracting to 58.1 mm from 64.5 mm resulted in a third of the
digging speed and energy efficiency. Another trial with about a 6 mm difference in
the contraction and dilation diameters (62.5 mm and 68.4 mm) achieved only two
thirds the speed as the smallest diameter case.
Table 7.1: Examination of Speed to Energy Ratio
Contraction
Diameter
Dilation
Diameter
Contracted
Distance
(mm)
(mm)
56.5
57.8
58.1
58.2
60.4
60.5
62.5
62.6
65.1
66.1
67.3
62.1
59.5
64.5
62.0
68.2
68.4
68.4
68.3
68.2
68.4
68.4
(mm)
Average
Downward
Speed
Average
Energy
Used
Speed to
Energy
Ratio
5.6
1.7
6.4
3.8
7.8
7.9
5.9
5.7
3.1
2.3
1.1
(mm/s)
0.06
0.01
0.02
0.02
0.04
0.05
0.04
0.03
0.006
0.02
0.006
(J/cycle)
0.50
0.15
0.54
0.34
0.65
0.63
0.41
0.41
0.17
0.07
0.02
0.11
0.09
0.04
0.07
0.06
0.07
0.10
0.07
0.03
0.26
0.38
22
Considering the variety of results obtained in these diameter tests, the 56.5 mm
contraction diameter test may have been an outlier in terms of speed and energy
efficiency.
While the energy calculations seem to stay constant with respect to the
difference in contraction and dilation diameters, the recorded digging speeds seem to
differ more than they should.
This could be due to the impreciseness of the string
potentiometer or to imperfections in attaining similar conditions for each test.
As the difference between contraction and dilation diameter got smaller, the
amount of energy used per cycle fell quite quickly.
If energy efficiency is the top
concern (with little regard for digging speed), then it would be best to operate
RoboClam 2 at the minimum speed in which fluidization is induced. If digging speed
is a top priority, then contracting to a small diameter from a comparatively larger
one seems to be the best choice.
Contracting 6 mm actually resulted in greater
digging speed and less energy used than both trials that contracted 8 mm.
It's
possible that contracting for any greater distance than 6 mm to 7 mm may actually
use more energy than it's worth.
Large versus Small Contraction Diameters
7.2
The large diameter test involved RoboClam 2 cycling between diameters of 62.3 mm
and 66.4 mm. The small diameter test cycled between 58.2 mm and 61.2 mm. The
data was quite noisy, and among the many trials, only a slight advantage was found
with a small diameter versus a larger diameter.
Both trials had roughly the same
energy usage.
The small advantage may be accentuated if the difference between the small and
large diameter tests was more extreme.
23
0
-Small
5
Diameter
-15
-20
-30
-35
-40
0
20
40
60
80
100 120
140 160
180 200 220 240
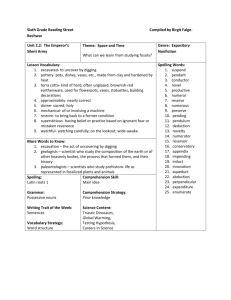
Figure 7-1: DEPTH VS CYCLE FOR DIFFERENT CONTRACTION DIAMETERS. The large
diameter test involved RoboClam 2 cycling between diameters of 62.3 mm and 66.4 mm. The small
diameter test cycled between 58.2 mm and 61.2 mm. The small diameter test resulted in faster
digging because the same weight of the device is concentrated on a smaller area. Since RoboClam
2's digging is primarily inhibited by the sand below the device (when the exterior of the device is
fluidized), a more concentrated force results in more penetration of the sand. Only two tests are
shown, but other tests produced comparable data. It is currently unknown why the data is so noisy.
7.3
Fluidization Time and Digging Speed
During a contraction, the plates accelerate to a constant speed and then decelerate
to a stop. Using the calculated minimum fluidization velocity from section 2.2, the
digging speed was plotted against the time that the plates were moving above the
minimum fluidization velocity during an average contraction cycle.
A linear
relationship was found between the two parameters, and by extrapolating a linear
fit, the minimum time that the plates must be moving past the minimum fluidization
velocity was found to be approximately 0.02 s.
24
0.07
0
0.06
.0.05
~0.04
@~@
r0.03
6
0.02
9
0,01
0
0
0.04
0.12
0.08
0.2 1
0.16
Time Fluidized (s)
Figure 7-2: DIGGING SPEED VS TIME FLUIDIZED. "Time fluidized" represents the time that
the plates spent moving above the minimal fluidization velocity, which in our calculation was found
to be 15 mm/s. This graph shows that RoboClam 2 needs to move its plate past the minimal
fluidization velocity and for a certain amount of time (around 0.02 s) for the digging speed to be
anything meaningful.
70
60
a
50
40
.~
a
30
20
a,
ii
'S
5.10
0
0
'30
15
45
Depth (mi)
Figure 7-3: TOTAL ENERGY EXPENDED UP TO DEPTH VS DEPTH. The energy cycle
required per cycle should be constant with depth, and therefore a graph of total energy expended vs
depth should be a line with constant positive slope. From the shape of the graph, as RoboClam 2
digs to deeper depths, it needs exponentially more energy to continue digging. This discrepancy could
be caused by a number of things. For example, the starting position during this test was when
RoboClam 2 was sitting on the surface of the sand, and so as RoboClam 2 digs, more of the device
becomes surrounded by sand (and energy use increases since the plates move against sand rather than
water).
25
0
-15
-30
-45
-0
N
-60
-47
N
-83
N
-90
0
20
60
40
80
100
Cycle
Imparting
Figure 7-4: DEPTH PER CYCLE AT DIFFERENT DOWNWARD FORCES.
as
shortened
was
length
trial
the
why
is
which
failure,
device
downward force increased the chance of
J/cycle.
0.65
of
6.6%
within
requirements,
energy
similar
had
trial
Each
the force was increased.
7.4
Effect of Downward Force
Applying a downward force caused the digging speed to increase proportionally.
With the weight of RoboClam 2 and the piston, the digging speed was 0.057".
With a downward force of 47 N, the speed increased to 0.1182". At 83 N of force,
the speed increased to 0.269"n. The average energy used per cycle by RoboClam
2 also stayed about the same, meaning pressing down on the device doesn't make it
work harder. This also means that a heavier RoboClam should dig faster than a
lighter RoboClam given the same body shape and actuator movement parameters.
This response was expected; increasing the downward force causes the device to
impart more force on the soil below, which causes more stress and subsequently
quicker failure throughout the granular medium. As was observed, energy is not
expected to be affected with varying downward force since the direction of the force
is not in the same direction as the radial contraction and dilation of the plates.
26
8
Conclusions
Based on the results, and considering the energy limited environment that a future
RoboClam would be used in, there are a number of recommendations that can be
made to optimize the performance of the device.
For fast digging, a heavier device with a small full contraction radius is
encouraged.
The weight of the device is the primary driver for pushing the device
through the soil once it is fluidized around RoboClam. The small contraction radius
allows more of the weight to be concentrated in a smaller area on the soil. This will
impart more stress on the soil and make the soil fail to a greater depth in the vertical
direction below the tip of the device. RoboClam 2 sinks to the depth of soil failure.
Breaking the failure stress of the packed sand below RoboClam is essential to digging.
Contraction speed of the device is not so important so long as it is above the
minimum fluidizing velocity for the surrounding medium. However, the plates should
contract at this speed for as long as possible, which means the plates must accelerate
to this speed as fast as possible.
The optimum difference between contraction and dilation diameter for RoboClam
2 was found to be around 6 mm. Contracting over a larger difference actually worked
to hinder the device's speed and cost much more energy than what was needed for
that particular digging speed.
While lower differences between contraction and
dilation diameters were found to have greater digging speed to energy expended
ratios, the speed was too low for any sort of practical purpose.
9
Future Work
Modeling RoboClam showed us that RoboClam 2's plates need to be contracted at
a higher speed as it digs to greater depths.
It would be interesting to design a
program that takes data from the depth sensor and uses it as feedback to increase
the contraction speed.
Depth data was taken only once per contraction (right after the contraction was
completed). It would be interesting to record depth data at a much higher frequency
27
and during the contraction cycle so that we can derive a better model for RoboClai
2's digging.
From this model, we can determine what aspects of RoboClam 2's
digging routine need to be accentuated and what aspects offer little importance.
Without vertical force or some kind of propellant, RoboClam 2's maximum speed
is the speed at which it can fall through fluidized sand before the vertical stress in
the soil matches the weight of the device.
One way to increase the digging speed
closer to this maximum speed is to shorten the pause time between contraction and
dilation and to decrease dilation time (increase dilation speed). The objective would
be to increase total contraction time, increasing the time that RoboClam 2 fluidizes
the soil around itself and actively digs.
RoboClam
2
should
also be tested
at far
lower
experimentally determine the minimum fluidization velocity.
28
contraction
speeds
to
Bibliography
[1] Dorsch, Daniel S.
Robot
with
"Design of a Biologically-Inspired Underwater Borrowing
On-Board
Actuation."
Thesis.
Massachusetts
Institute
of
Technology, 2015.
[2] Becker,
Christopher R. "Drag Coefficients on Razor Clams in Slightly
Fluidized Granular Media." Thesis. Massachusetts Institute of Technology,
2008.
[3] Maycock, Andrew. Minimum Fluidizing Velocities for Various Bed Packings,
2006.
[4] Dorsch, Daniel S. "The Design of a Fluidized Bed for Testing of a Robotic
Burrowing Device which Mimics Razor Clams." Thesis.
Massachusetts
Institute of Technology, 2012.
[5] Jia, Yuan, Yan Li, and David Hlavka. "Flow through Packed Beds." 2009.
29