Document 10749108
advertisement

Electronic Journal of Differential Equations, Vol. 2001(2001), No. 78, pp. 1–23.
ISSN: 1072-6691. URL: http://ejde.math.swt.edu or http://ejde.math.unt.edu
ftp ejde.math.swt.edu (login: ftp)
Boundary stabilization of a linear elastodynamic
system with variable coefficients ∗
Rabah Bey, Amar Heminna & Jean-Pierre Lohéac
Abstract
We consider the boundary stabilization of a linear elastodynamic system, with variables coefficients, by natural feedback. In [5, 7], Guesmia
proved the boundary stabilization of the linear elastodynamic system,
with variables coefficients, under restrictive conditions on the shape of
the domain and on the data of the problem. Here, we propose using local
coordinates in the boundary integrals to obtain stability under conditions
that are only geometrical and less restrictive than those in [5, 7]. We also
extend the boundary stabilization result obtained in [2].
Introduction
Let Ω be a bounded open set of R3 such that its boundary Γ satisfies
Γ is of class C 2 , Γ = Γ0 ∪ Γ1 with meas(Γ1 ) 6= 0, Γ0 ∩ Γ1 = ∅.
(1)
Let aijkl (i, j, k, l = 1, 2, 3) be a set of functions in W 2,∞ (Ω × R) such that
aijkl = aklij = ajikl ,
in Ω × R ,
satisfying for some α > 0 the condition
aijkl εij εkl ≥ αεij εij ,
aijkl
´ εij εkl ≤ 0 ,
in Ω × R
(2)
for every symmetric tensor εij , where ´ denotes ∂/∂t (we use the summation
convention for repeated indices). Given x, a point on Γ, we denote by ν(x) the
normal unit vector pointing outward from Ω.
For a regular vector field v = (v1 , v2 , v3 ), we define
vi,j = ∂j vi ,
εij (v) =
1
(vi,j + vj,i ) ,
2
σij (v) = aijkl εkl (v) .
∗ Mathematics Subject Classifications: 93B03, 93B05, 93D15.
Key words: elastodynamic system, elasticity, boundary stabilization, feedback.
c
2001
Southwest Texas State University.
Submitted March 19, 2001. Published December 21, 2001.
1
2
Boundary stabilization of a linear systems
EJDE–2001/78
Let A and B be two positive constants. We consider the following problem
introduced by Lagnese [12]:
u00 − div σ(u) = 0 , in Ω × R+ ,
u = 0 , on Γ0 × R+ ,
σ(u)ν + Au + Bu0 = 0 , on Γ1 × R+ ,
(3)
0
u(0) = u , in Ω ,
u0 (0) = u1 ,
in Ω .
Let L2 (Ω) (resp. H1 (Ω)) be the space of vector fields v such that every component of v belongs to L2 (Ω) (resp. H1 (Ω)). We introduce the space H1Γ0 (Ω) =
{v ∈ H1 (Ω) / v = 0 , on Γ0 } and we assume
(u0 , u1 ) ∈ H1Γ0 (Ω) × L2 (Ω) .
(4)
Under this assumption, using semi-group theory, one can show that problem (3)
is well-posed.
The energy functional associated with this problem is
Z
Z
1
1
|u0 |2 + σ(u) : ε(u) dx +
A|u|2 dΓ .
E(u, t) =
2 Ω
2 Γ1
A boundary stabilization result for this system has been proved by Guesmia [4]
under restrictive conditions on the shape of Ω and on other data of the problem.
We propose here a direct approach by using local coordinates in the expression of
boundary integrals. Our conditions are only geometrical and are less restrictive
than those in works of Guesmia. Our proof is constructive. Furthermore, the
reader will observe that similar conditions have been introduced by Lagnese [11]
for some anisotropic linear elastodynamic systems and by Lasieka and Triggiani
[13] for the wave equation.
3
For a vector field h = (h1 , h2 , h3 ) ∈ C 1 (Ω) we denote by γh a small
(non-negative) number satisfying
|hm ∂m (aijkl ) εkl εij | ≤ γh aijkl εkl εij ,
for all symmetric tensor εij . We assume that there exists a vector field h =
(h1 , h2 , h3 ) such that
3
h ∈ C 1 (Ω) , h.ν ≤ 0 , on Γ0 , h.ν > 0 , on Γ1 ,
(5)
and furthermore, there exist αh > 0 and βh ∈ R such that
Z
Z
Z
3
1
∀ξ ∈ C (Ω) ,
σij (ξ)hk,j ξi,k dx ≥ αh
σ(ξ) : ε(ξ) dx + βh
Ω
Ω
max(div(h)) − min(div(h)) < 2αh − γh ,
Ω
Ω
|ξ|2 dΓ ,
Γ1
min(div(h)) > 0 ,
Ω
(6)
where we can choose βh = 0, if meas(Γ0 ) 6= 0.
Under the above assumptions, we obtain the following result.
EJDE–2001/78
R. Bey, A. Heminna & J.-P. Lohéac
3
Γ1
Ω
Γ0
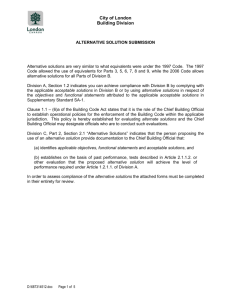
x0
Figure 1: An example of an open set Ω.
Theorem 1 Assume (1), (2) and (4). If there exists a vector field h satisfying
(5) and (6), then there exists some constant ω > 0 such that the solution u of
(3) satisfies
∀t ≥ 0 , E(u, t) ≤ E(u, 0) exp(1 − ωt) .
Remark 1 Since Ω is bounded and Γ satisfies (1), Γ1 is compact. Using continuity of h and ν given in (1) and (5), we get
∃k > 0 : h.ν ≥ k ,
on Γ1 .
Remark 2 This result can be applied when h(x) = x − x0 (αh = 1, βh = 0)
and
γh < 2 ,
Γ0 = {x ∈ Γ / h(x).ν(x) ≤ 0 } ,
Γ1 = {x ∈ Γ / h(x).ν(x) > 0 } .
Especially, a possible case is Ω = U1 \ U2 , where U1 is a convex open set, U2
is a closed set, star-shaped with respect to one of its points, x0 , such that
{x0 } ⊂ U2 ⊂ U1 . (see figure 1)
This case has been studied in [4] for a particular shape of Ω (Γ1 is supposed to
be close to a sphere). Furthermore, this remark can be extended as follows.
Theorem 2 Assume (1), (2), (4) and suppose that
γx−x0 < 2 ,
(x − x0 ).ν(x) ≤ 0 , if x ∈ Γ0 ,
(x − x0 ).ν(x) ≥ 0 , if x ∈ Γ1 .
Then there exists a constant ω > 0 such that the solution u of (3) satisfies
∀t ≥ 0 ,
E(u, t) ≤ E(u, 0) exp(1 − ωt) .
4
Boundary stabilization of a linear systems
EJDE–2001/78
This paper is mainly devoted to the proof of Theorem 1. After introducing
some notations and definitions (section 1), we deal with the well-posedness in
section 2 and conclude with the stabilization in section 3 where the proofs of
Theorems 1 and 2 are given.
1
Notation
In this paper, we use the convention of repeated indices. As usual, we write
tr(τ ) = τ11 + τ22 + . . . = τii , v.w = vi wi , σ(v) : ε(v) = σij (v)εij (v).
Geometrical notation
We define Ω, Γ, ν as above. Since Γ is of class C 2 , for every point x of Γ, we
can build a local C 2 -diffeomorphism φ from an open subset Γ̂ of R2 onto some
open neighbourhood of x in Γ. Then, the following vectors
aα (x) =
∂φ
φ−1 (x) ,
∂ξα
α ∈ {1, 2} ,
are independent and generate the tangent plane to Γ at x, Tx (Γ). Furthermore,
we denote by T (Γ) the tangent bundle (see [14] and [18]).
Then, we define
• The metric tensor g related to φ: gαβ = aα .aβ , for all (α, β) in {1, 2}2 ,
• The inverse tensor of g: g αβ 1≤α,β≤2 .
We denote by π(x) the orthogonal projection on Tx (Γ) and, for a given vector
field v : Ω → R3 , we will write
∀x ∈ Γ , v(x) = vT (x) + vν (x)ν(x) ,
with vT (x) = π(x)v(x) , vν (x) = v(x).ν(x) .
We denote by ∂T (resp. ∂ν ) the tangential (resp. normal) derivative. If v is
some regular function, the transposed vector of ∂T v is the tangential gradient
of v and is denoted by ∇T v. We have
∇v = ∇T v + ∂ν v ν ,
on Γ .
(7)
Strain and stress
If the vector field v is regular enough, as in [14] and [18], we can write
dv =π(∂T vT )π + vν (∂T ν) + (∂ν vT )ν
+ ν ((∂T vν ) − vT (∂T ν) + (∂ν vν )ν) ,
on Γ ,
(8)
where v (resp. τ ) is the transposed vector (resp. matrix) of v (resp. τ ). The
strain tensor ε(v) can be written on Γ as follows
ε(v) = εT (v) + νεS (v) + εS (v)ν + εν (v)νν ,
on Γ ,
EJDE–2001/78
R. Bey, A. Heminna & J.-P. Lohéac
5
with
2εT (v) =π(∂T vT )π + π∂T vT π + 2vν ∂T ν ,
2εS (v) =∂ν vT + ∇T vν − (∂T ν)vT ,
εν (v) =∂ν vν .
Similarly, we can write
σ(v) = σT (v) + νσS (v) + σS (v)ν + σν (v)νν ,
on Γ ,
where σT (v) is a linear symmetric operator field on the tangent plane, σS (v) is
a tangent vector field and σν (v) is a scalar field.
Remark 3 Let v be in H1 (Ω). From the previous formulæ, we deduce
ε(v) : ε(v) = εT (v) : εT (v) + 2|εS (v)|2 + |εν (v)|2 ,
on Γ ,
σ(v) : ε(v) = σT (v) : εT (v) + 2σS (v)εS (v) + σν (v)εν (v) ,
on Γ .
We will consider the following vector spaces.
• Ls (Tx (Γ)) is the space of linear symmetric operators of Tx (Γ),
• Ls (T (Γ)) is the space of symmetric operators of T (Γ).
Remark 4 ∂T ν(x) belongs to Ls (Tx (Γ)); its eigenvalues are principal curvatures of Γ at x.
Some function spaces
Consider a tangent field vT : Γ → T (Γ) with: vT = v 1 a1 + v 2 a2 . We will say
that vT belongs to L2 (Γ, T (Γ)) if v 1 and v 2 belong to L2 (Γ). In L2 (Γ, T (Γ)),
we define the following norm
Z
1/2
kvT kL2 (Γ,T (Γ)) =
|vT |2 dΓ
,
(9)
Γ
1/2
which is equivalent to the norm: vT 7→ kv 1 k2L2 (Γ) + kv 2 k2L2 (Γ)
. Similarly,
vT belongs to H1 (Γ, T (Γ)) if v 1 and v 2 belong to H1 (Γ) and we define a norm
in H1 (Γ, T (Γ)) by
kvT kH1 (Γ,T (Γ)) = kv 1 k2H1 (Γ) + kv 2 k2H1 (Γ)
1/2
.
(10)
A field τT : Γ → Ls (T (Γ)) belongs to L2 (Γ, Ls (T (Γ))) if (τT : τT )1/2 : Γ → R
belongs to L2 (Γ). We take
kτT kL2 (Γ,Ls (T (Γ))) = k(τT : τT )1/2 kL2 (Γ) .
Remark 5 If vT ∈ H1 (Γ, T (Γ)), then εT (vT ) ∈ L2 (Γ, Ls (T (Γ))).
(11)
6
Boundary stabilization of a linear systems
EJDE–2001/78
Another useful space is V = {v ∈ H1 (Ω) / vT ∈ H1 (Γ, T (Γ))} with the norm
kvkV = kvk2H1 (Ω) + kvT k2H1 (Γ,T (Γ))
1/2
.
(12)
Proposition 1 The expression
Z
kvT k21 =
|vT |2 + εT (vT ) : εT (vT ) dΓ .
Γ
constitutes a norm equivalent to (10).
Proof. We only need to prove that there exists a constant C > 0 such that
kvT kH1 (Γ,T (Γ)) ≤ CkvT k1 ,
∀vT ∈ H1 (Γ, T (Γ)) .
(k) Assume that such a constant does not exist. Then there exits a sequence vT
such that
(k)
kvT kH1 (Γ,T (Γ)) = 1 , ∀k ∈ N ,
(k)
εT (vT ) → 0 , in L2 (Γ, Ls (T (Γ))) ,
(k)
vT
→ 0 , in L2 (Γ, T (Γ)) .
(k)
kα
Setting vT = v k1 a1 + v k2 a2 and v,β
=
∂v kα
∂ξβ ,
kµ
kα
v,β
+ g λα gβµ v,λ
→ 0,
we get
in L2 (Γ) .
k1
k2
With α = β, we easily get v,1
+ v,2
→ 0, in L2 (Γ). We have
kµ
kα
kα
kµ
gαη v,β
+ g λα gβµ v,λ
= gαη v,β
+ gβµ v,η
.
This expression vanishes in L2 (Γ) as k → ∞.
(2, 2) and (β, η) = (1, 2) and get
k1
k2
g11 v,1
+ g21 v,1
→ 0,
k2
k1
g22 v,2 + g21 v,2 → 0 ,
k1
k2
g11 v,2
+ g22 v,1
→ 0,
k1
k2
v,1 + v,2 → 0 , in
We use (β, η) = (1, 1), (β, η) =
in L2 (Γ) ,
in L2 (Γ) ,
in L2 (Γ) ,
L2 (Γ) .
(k)
(k)
(k) Set wT = gvT = wk1 a1 + wk2 a2 . From vT
→ 0, in L2 (Γ, T(Γ)) and
previous computations, one can easily deduce that sequences wk1 , wk1 ,
k1
k2
k2
k1
w,1
+ w,2
, w,1
+ w,2
vanish in L2 (Γ). Thanks to Korn’s inequality in Γ̂,
we get that sequences wk1 , wk2 vanish in H1 (Γ). Hence, v k1 , v k2 vanish
in H1 (Γ). This is impossible.
EJDE–2001/78
2
R. Bey, A. Heminna & J.-P. Lohéac
7
Well-posedness
By using semi-group theory [17], we can show that problem (3) is well-posed.
Proposition 2 Assume (2). If (u0 , u1 ) belongs to H1Γ0 (Ω) × L2 (Ω), then problem (3) has one and only one (weak) solution u which satisfies
u ∈ C 0 (R+ , H1Γ0 (Ω)) ∩ C 1 (R+ , L2 (Ω)) .
If (u0 , u1 ) belongs to (H2 (Ω) ∩ H1Γ0 (Ω)) × H1Γ0 (Ω) and if
σ(u0 ).ν + Au0 + Bu1 = 0 ,
on Γ1 ,
then the (strong) solution of (3) satisfies
(u, u0 , u00 ) ∈ C 0 (R+ , (H2 (Ω) ∩ H1Γ0 (Ω)) × H1Γ0 (Ω) × L2 (Ω)) .
3
Stabilization
Following Komornik [9], we will prove here that the energy functional is exponentially decreasing with respect to time. From Lemma 5, to be proved later,
it is sufficient to consider the case meas(Γ0 ) 6= 0. We recall the following fundamental result [9].
Lemma 1 Let E : R+ → R+ be a non-increasing function and assume that
there exists T > 0 such that
Z ∞
E(s) ds ≤ T E(t) , ∀t ≥ 0 .
t
Then we have
t
E(t) ≤ E(0) exp 1 −
,
T
∀t ≥ T .
First, we prove that the energy functional is non-increasing.
Proposition
√ 3 Under assumptions (1), (2), (4), the weak solution u of (3) is
such that u0 B belongs to L2loc (R+ , L2 (Γ1 )) and aijkl
´ εij εkl belongs to the space
L1loc (R+ , L1 (Ω)). The energy functional is non-increasing and satisfies
E(u, T ) − E(u, S) = −
Z
T
S
for 0 ≤ S < T < +∞.
Z
Γ1
B|u0 |2 dΓ dt +
1
2
Z
T
S
Z
Ω
aijkl
´ εij (u) εkl (u) dx dt ,
8
Boundary stabilization of a linear systems
EJDE–2001/78
Proof. Assume first that u is a strong solution of (3) (with appropriate initial
data). We can write
Z Z
1
E 0 (u, t) =
u0 .u00 + σ(u) : ε(u0 ) + aijkl
´ εij (u) εkl (u) dx +
Au.u0 dΓ
2
Ω
Γ1
Z
Z
1
=
(u0 . div(σ(u)) + σ(u) : ε(u0 )) dx +
aijkl
´ εij (u) εkl (u) dx
2 Ω
Ω
Z
+
Au.u0 dΓ
Γ1
Z
Z
Z
1
=
(σ(u)ν) .u0 +
aijkl
´ εij (u) εkl (u) dx dΓ +
Au.u0 dΓ
2
Γ1
Γ1
Z
ZΩ
1
0 2
aijkl
´ εij (u) εkl (u) dx .
=−
B|u | dΓ +
2 Ω
Γ1
We obtain the result by integrating the time variable from S to T . A density
argument completes the proof.
In order to apply Lemma 1, we have to prove the following results.
Preliminary results
In this subsection, we assume (1) and
(u0 , u1 ) ∈ H2 (Ω) ∩ H1Γ0 (Ω) × H1Γ0 (Ω) ,
σ(u0 )ν + Au0 + Bu1 = 0 ,
on Γ1 ,
(13)
and consider the (strong) solution of (3). Let h be a vector field satisfying (5)
and (6). For some positive constant β, define
M u = 2(h.∇)u + βu .
The value of β will be chosen later.
Lemma 2 The strong solution u of (3) satisfies
Z TZ
(div(h) − β) (|u0 |2 − σ(u) : ε(u)) dx dt
S
+2
Z
Ω
T
Z
σi,j (u)hk,j ui,k dx dt −
S
Ω
= −
Z
+
Z
Z
T
S
T Z
u M udx +
T
0
Ω
T Z
S
S
S
Z
Z
hm ∂m (aijkl )εkl (u)εij (u) dx dt
Ω
((σ(u).ν)M u − h.νσ(u) : ε(u)) dx dt .
Γ
h.ν|u0 |2 dΓdt .
Γ
Proof. We use the multipliers method (see [9], [15]). Thanks to the first equation
in (3), we may write
Z TZ
Z TZ
00
u .M u dx dt =
div(σ(u)).M u dx dt .
(14)
S
Ω
S
Ω
EJDE–2001/78
R. Bey, A. Heminna & J.-P. Lohéac
9
Consider the left-hand side of the above equation.
T
Z
hZ
iT Z T Z
u00 .M u dx dt =
u0 .M u dx −
u0 .M u0 dx dt
S
Ω
Ω
S
Ω
hZ
iT
=
u0 .M u dx
Z
S
S
Ω
−2
T
Z
Z
S
u0i hj u0i,j dx dt − β
Z
Ω
T
S
Z
|u0 |2 dx dt .
Ω
We have
2
Z
T
Z
S
u0i hj u0i,j
dx dt =
Z
=
Z
Ω
T
S
T
Z
hj ∂j |u0 |2 dx dt
Ω
Z
S
0 2
h.ν |u | dΓ dt −
Z
T
Γ
S
iT Z
hZ
u0 .M u dx −
u00 .M u dx dt =
T
Z
div(h)|u0 |2 dx dt .
Ω
Hence
T
Z
Z
S
Ω
S
Ω
+
Z
T
S
Z
S
Z
h.ν |u0 |2 dΓ dt
Γ
0 2
(div(h) − β) |u | dx dt .
Ω
Now, we consider the right-hand side of (14):
Z
T
Z
div(σ(u)).M u dx dt =2
Ω
S
T
Z
Z
S
+β
σij,j (u)hm ui,m dx dt
Ω
T
Z
Z
S
u. div(σ(u)) dx dt .
Ω
We have
Z
T
S
Z
σij,j (u)hk ui,k dx dt
Ω
T
=
Z
=
S
Z T
Z
Z
Γ
Z
S
−
σij (u)νj hk ui,k dΓ dt −
Z
σ(u)ν.(h.∇)u dΓ dt −
Γ
T Z
S
Ω
Z
S
T
S
σij (u)hk ui,jk dx dt ,
T
Z
σij (u)∂j (hk ui,k ) dx dt
Ω
Z
Ω
σij (u)hk,j ui,k dx dt
(15)
10
Boundary stabilization of a linear systems
EJDE–2001/78
and
T
Z
−
Z
S
σij (u)hk ui,jk dx dt
Ω
Z Z
Z Z
1 T
1 T
=−
hk ∂k (σ(u) : ε(u)) dx dt +
hm ∂m (aijkl )εkl (u)εij (u) dx dt
2 S Ω
2 S Ω
Z TZ
Z TZ
1
1
=
div(h) σ(u) : ε(u) dx dt −
h.ν σ(u) : ε(u) dΓ dt
2 S Ω
2 S Γ
Z Z
1 T
+
hm ∂m (aijkl )εkl (u)εij (u) dx dt .
2 S Ω
Furthermore,
Z
T
Z
S
u. div(σ(u)) dx dt =
Z
Ω
T
Z
S
(σ(u)ν).u dΓ dt −
T
Z
Γ
S
Z
σ(u) : ε(u) dx dt .
Ω
Hence
Z
T
Z
S
div(σ(u)).M u dx dt
Ω
=
Z
T
Z
S
(div(h) − β) σ(u) : ε(u) dx dt − 2
Ω
T Z
+
Z
+
S
Z T
Z
T
Z
S
σij (u)hk,j ui,k dx dt
Ω
hm ∂m (aijkl )εkl (u)εij (u) dx dt
Ω
Z
S
((σ(u)ν).M u − h.ν σ(u) : ε(u)) dΓdt .
Γ
(16)
We deduce the desired result from (14), (15) and (16).
Lemma 3 There exist β > 0 and C1 > 0 such that
C1
Z
T
E dt
≤
−
Z
+
Z
+
Z
−
S
Z T
S
T
u .M u dx
0
Ω
T Z
S
T
S
Γ0
Z
Γ1
Z
Γ1
S
h.ν µ|∂ν uT |2 + (2µ + λ)|∂ν uν |2 dΓ dt
C1
− β A|u|2 − βBu.u0 + h.ν |u0 |2
2
dΓ dt
(2(Au + Bu0 ).(h.∇)u + h.ν σ(u) : ε(u)) dΓ dt .
EJDE–2001/78
R. Bey, A. Heminna & J.-P. Lohéac
11
Proof. Lemma 2, (5) and (6) give
Z TZ
(div(h) − β) |u0 |2 − σ(u) : ε(u) + (2αh − γh ) σ(u) : ε(u) dx dt
S
Ω
≤−
+
Z
Z
T Z
u0 .M u dx +
Ω
T Z
S
T
Z
S
S
h.ν |u0 |2 dΓ dt
Γ1
((σ(u)ν).M u − h.ν σ(u) : ε(u)) dΓ dt .
Γ
Since (6) is satisfied, we can choose β > 0 such that
β < div(h) < 2αh + β − γh ,
in Ω ,
(17)
and choose C1 > 0 such that
Z T
hZ
iT
C1
E dt ≤ −
u0 .M u dx
S
S
Ω
T Z
+
Z
+
S
Z T
S
1
Γ1
Z
C
2
A|u|2 + h.ν |u0 |2 dΓ dt
(18)
((σ(u)ν).M u − h.ν σ(u) : ε(u)) dΓ dt .
Γ
We write u = uT + uν ν and h = hT + hν ν on Γ. With Dirichlet boundary
condition, we get on Γ0
M u = 2(h.∇)u = 2h.ν ∂ν u ,
εT (u) = 0 ,
2εS (u) = ∂ν uT .
and, with our notations, using Remark 3, we get
(σ(u)ν).M u = 2h.ν σS (u)∂ν uT + σν (u)∂ν uν ,
on Γ0 ,
σ(u) : ε(u) = σS (u)∂ν uT + σν (u)∂ν uν , on Γ0 ,
(σ(u)ν).M u − h.ν σ(u) : ε(u) = h.ν σ(u) : ε(u) , on Γ0 .
Hence
Z
((σ(u)ν).M u − h.ν σ(u) : ε(u)) dΓ =
Γ0
Z
h.ν σ(u) : ε(u) dΓ .
(19)
Γ0
Using the boundary conditon on Γ1 , we get
Z
Z
Z
(σ(u)ν).M u dΓ = −
2(Au + Bu0 ).(h.∇)u dΓ − β
Γ1
Γ1
u.(Au + Bu0 ) dΓ .
Γ1
(20)
We deduce the result from (18), (19) and (20).
Lemma 4 There exists C2 > 0 such that
Z
u0 (t).M u(t) dx ≤ C2 E(u, t) ,
Ω
∀t ≥ 0 .
12
Boundary stabilization of a linear systems
EJDE–2001/78
Proof. Given t ≥ 0, for every η > 0, we can write
Z
η
1
u0 .M u dx ≤ ku0 k2L2 (Ω) + kM uk2L2 (Ω) .
2
2η
Ω
We have
kM uk2L2 (Ω)
=
Z
(|2(h.∇)u|2 + β 2 |u|2 + 4βu.(h.∇)u) dx
Ω
=
Z
(|2(h.∇)u|2 + β 2 |u|2 + 2β∇(|u|2 )h) dx
=
ZΩ
(|2(h.∇)u|2 + β(β − 2 div(h))|u|2 ) dx + 2β
Ω
Z
h.ν |u|2 dΓ .
Γ1
Setting R = supΩ |h|, from (17), we get
Z
Z
kM uk2L2 (Ω) ≤ 4R2
|∇u|2 dx + 2β
Ω
h.ν |u|2 dΓ .
Γ1
With Korn’s inequality, we can find the smallest positive real number R1 (depending on h and β) such that for all v ∈ H1Γ0 (Γ),
Z
Z
Z
Z
2
2
2
2
4R1
σ(v) : ε(v) dx +
A|v| dΓ ≥ 4R
|∇v| dx + 2β
h.ν |v|2 dΓ .
Ω
Γ1
Ω
Γ1
It follows that
Z
Z
Z
η
2R12 u0 .M u dx ≤ ku0 k2L2 (Ω) +
σ(u) : ε(u) dx +
A|u|2 dΓ .
2
η
Ω
Ω
Γ1
The choice η = 2R1 gives the result with C2 = 2R1 .
Lemma 5 There exists C3 > 0 such that, for every η in (0, 1),
Z TZ
Z T
C3
|u|2 dΓ dt ≤
E(u, S) + η
E(u, t) dt , 0 ≤ S < T < +∞ .
η
S
Γ1
S
Proof. We proceed as in [9]. We define z, depending on t, as follows:
div(σ(z)) = 0 , in Ω ,
z = u , on Γ .
We have
Z
z. div(σ(v)) dx =
Z
u.(σ(v)ν) dΓ ,
∀v ∈ H2 (Ω) ∩ H10 (Ω) .
Γ1
Ω
Using the definition of the energy functional and Proposition 3, we can find
some positive constants c1 , c2 , c01 , c02 such that
Z
Z
|z|2 dx ≤ c1
|u|2 dΓ ≤ c2 E ;
Ω
Γ
Z
Z 1
0 2
0
|z | dx ≤ c1
|u0 |2 dΓ ≤ c02 (−E 0 ) .
Ω
Γ1
EJDE–2001/78
R. Bey, A. Heminna & J.-P. Lohéac
13
Furthermore, we have
Z
Z
Z
σ(z) : ε(u − z) dx = − (u − z). div(σ(z)) dx +
(u − z).(σ(z)ν) dΓ = 0 .
Ω
Ω
Γ1
Then
Z
σ(z) : ε(u) dx =
Z
Ω
σ(z) : ε(z) dx ≥ 0 .
Ω
From (3), we deduce
Z
z.(u00 − div(σ(u)) dx dt
ZΩ
Z
Z
=
z.u00 dx +
σ(z) : ε(u) dx −
z.(σ(u)ν) dΓ
Ω
Ω
Γ1
Z
Z
Z
=
z.u00 dx +
σ(z) : ε(u) dx +
u.(Au + Bu0 ) dΓ .
0=
Ω
Ω
Γ1
Hence
Z
Z
2
A|u| dΓ ≤ −
Γ1
00
z.u dx −
Z
Ω
Bu.u0 dΓ .
Γ1
For 0 < S < T < ∞, we obtain
Z
T
Z
S
2
A|u| dΓ dt ≤ −
Γ1
hZ
iT Z
z.u dx +
T
0
Ω
S
Z
S
0
0
z .u dx dt−
Ω
T
Z
S
Z
Bu.u0 dΓ dt .
Γ1
Let C be a positive constant, large enough. Using the Cauchy-Schwarz inequality and the estimates obtained above, we can write for every θ > 0,
Z
T
Z
S
2
A|u| dΓ dt
≤ CE(u, S) + C
Z
Γ1
T
(−E 0 (u, t))1/2 (E(u, t))1/2 dt
S
+B
Z
T
S
Z
|u| |u0 | dΓ dt
Γ1
Z
C
Cθ T
≤ CE(u, S) +
E(u, t) dt + E(u, S)
2 S
2θ
Z Z
Z Z
1 T
B2 T
2
+
A|u| dΓ dt +
|u0 |2 dΓ dt .
2 S Γ1
2A S Γ1
From Proposition 3, we get
Z
T
S
Z
2
|u| dΓ dt ≤
Γ1
We now choose θ =
Aη
C
2C
C
B
+
+
A
Aθ A2
Cθ
E(u, S) +
A
and obtain the desired result.
Z
T
E(u, t) dt .
S
14
Boundary stabilization of a linear systems
EJDE–2001/78
Proof of Theorem 1
We assume (1) and that h satisfies (5) and (6). From Lemma 5, it suffices to
consider the case meas(Γ0 ) 6= 0. We first suppose (13) and we consider the
(strong) solution u of (3).
The energy functional is non-increasing (Proposition 3). From Lemma 4, we
deduce
hZ
iT
−
u0 .M u dx ≤ 2C2 E(u, S) .
S
Ω
Since h.ν ≤ 0 on Γ0 , Lemma 3 gives
Z T
C1
E dt ≤ 2C2 E(u, S)
S
+
Z
T
Z C1
− β A|u|2 − βBu.u0 + h.ν |u0 |2 dΓ dt
2
Γ1
Z
(2(Au + Bu0 ).(h.∇)u + h.ν σ(u) : ε(u)) dΓ dt .
S
T
Z
−
S
Γ1
There exists c > 0 such that
Z Z
Z
T
0
βu.u dΓ dt ≤
S
Γ1
T
Z
S
2
|u| dΓ dt + c
Γ1
Z
T
S
Z
|u0 |2 dΓ dt .
Γ1
Hence, using Proposition 3, we can find C4 > 0 and C5 > 0 such that
Z TZ
Z T
C1
E dt ≤C4 E(u, S) + C5
|u|2 dΓ dt
S
S
T
Z
−
S
Z
Γ1
(2(Au + Bu0 ).(h.∇)u + h.ν σ(u) : ε(u)) dΓ dt .
Γ1
From (2), Remarks 1 and 3, we get
Z T
Z TZ
C1
E dt ≤C4 E(u, S) + C5
S
S
−
Z
T
Z
S
− kα
Z
Γ1
2(Au + Bu0 ).(h.∇)u dΓ dt
Γ1
T Z
S
|u|2 dΓ dt
Γ1
(21)
εT (u) : εT (u) + 2|εS (u)|2 + |εν (u)|2 dΓ dt .
Now, we estimate two integrals which appear on the right hand side (second
line of the above formula).
RT R
Estimation of I1 = S Γ1 2Au.(h.∇)u dΓ dt.
We denote by C some positive constant which is independent of u and large
enough. We have u.(h.∇)u = 21 h.∇(|u|2 ). Setting u = uT + uν ν and h =
hT + hν ν on Γ1 , we use (7) and get
u.(h.∇)u =
1
∇T (|u|2 ).hT + hν uT .(∂ν uT ) + hν uν (∂ν uν ) ,
2
on Γ1 .
EJDE–2001/78
Since
R. Bey, A. Heminna & J.-P. Lohéac
Z
2
A∇T (|u| ).hT dΓ = −
Γ1
Z
A|u|2 div(hT ) dΓ ,
T
Γ1
hence
Z
2
Γ1
15
A∇T (|u| ).hT dΓ ≤ C
Z
|u|2 dΓ .
(22)
Γ1
Using εS (u) (see subsection 1.2), we can write
hν uT .∂ν uT = hν uT .(2εS (u) + (∂T ν)uT − ∇T uν ) ,
on Γ1 .
Let θ be some positive number. We have
Z
Z
Z
C
|uT |2 dΓ .
4Ahν uT .εS (u) dΓ ≤ θ
|εS (u)|2 dΓ +
θ
Γ1
Γ1
Γ1
Since hν and ∂T ν are bounded, we get
Z
Z
2Ahν uT .(∂T ν)uT dΓ ≤ C
Γ1
|uT |2 dΓ .
(23)
(24)
Γ1
Now, observe
Z
Z
hν uT .∇T uν dΓ = −
uν div(hν uT ) dΓ
T
Γ1
ZΓ1
Z
=−
hν uν div(uT ) dΓ −
T
Γ1
uν ∇T hν .uT dΓ .
Γ1
Proposition 1 implies
Z
Z
C
|u|2 dΓ .
2Ahν uν div(uT ) dΓ ≤ θkuT k21 +
T
θ Γ1
Γ1
Hence
Z
Z
2Ahν uT .∇T uν dΓ ≤ θ
Γ1
εT (uT ) : εT (uT ) dΓ +
Γ1
We can also write
Z
Z
2Ahν uν (∂ν uν ) dΓ ≤ θ
Γ1
Γ1
|∂ν uν |2 dΓ +
C
θ
C
θ
Z
Z
|u|2 dΓ .
(25)
Γ1
|u|2 dΓ .
(26)
Γ1
Finally, (22)–(26) give
|I1 | ≤θ
Z
T
Z
S
+
C
θ
Z
Γ1
T
S
|∂ν uν |2 + εT (uT ) : εT (uT ) + |εS (u)|2 dΓ dt
Z
Γ1
|u|2 dΓ dt .
(27)
16
Boundary stabilization of a linear systems
EJDE–2001/78
We emphasize that, in (27), θ is a positive number to be chosen later and C is
a positive constant which does not depend on u.
RT R
Estimation of I2 = S Γ1 2Bu0 .(h.∇)u dΓ dt.
Here, we use (8) and get
u0 .(h.∇)u =u0T (∂T uT )hT + uν u0T (∂T ν)hT + hν u0T ∂ν uT
+ u0ν (∂T uν )hT − u0ν uT (∂T ν)hT + u0ν (∂ν uν )hν ,
on Γ1 .
This can be rewritten as
u0 .(h.∇)u =u0T .(∂T uT )hT + (uν u0T − u0ν uT ).(∂T ν)hT
+ u0ν ∇T uν .hT + hν (u0T .∂ν uT + u0ν (∂ν uν )) ,
on Γ1 .
Since h and ∂T ν are bounded, we get
Z
Z
θ
2C
2Bu0T .(∂T uT )hT dΓ ≤ kuT k21 +
|u0 |2 dΓ ,
2
θ Γ1 T
Γ1
Z
Z
Z
2B(uν u0T − u0ν uT ).(∂T ν)hT dΓ ≤ C
|u|2 dΓ +
|u0 |2 dΓ .
Γ1
Γ1
(28)
(29)
Γ1
Under the assumptions about Ω, we observe that Γ1 is a compact manifold
of dimension 2. So, we can build a finite number of local maps (U1 , φ1 ), . . . ,
(Uk , φk ) and an associated partition of unity (ϑ1 , . . . , ϑk ). We have
Z
Γ1
2Bu0ν ∇T uν .hT dΓ =
X̀ Z
j=1
2Bϑj u0ν ∇T uν .hT dΓ .
Uj
Consider
R one of the ` terms of the previous sum. Omitting the index j, we
denote U 2Bϑu0ν ∇T uν .hT dΓ . Using the notation introduced in section 1, we
write hT = h1 a1 + h2 a2 . Setting |g| = | det(g)|, W = φ−1 (U ), we get
Z
2Bϑu0ν ∇T uν .hT dΓ
U
Z
∂(u ◦ φ)
∂(uν ◦ φ) 2 1/2
ν
h1 +
h |g| dξ1 dξ2 .
=
2B(ϑ ◦ φ)(u0ν ◦ φ)
∂ξ1
∂ξ2
W
Since ϑ ◦ φ is continuous and compactly supported, vν = uν ◦ φ belongs to
H1/2 (W ) and kvν kH1/2 (W ) ≤ Ckuν kH1/2 (U ) . Let us define two subsets of W
W + = {(ξ1 , ξ2 ) ∈ W / h1 (ξ1 , ξ2 ) > 0} ,
W − = {(ξ1 , ξ2 ) ∈ W / h1 (ξ1 , ξ2 ) < 0} .
We have
Z
Z
∂vν 1 1/2
0 ∂vν 1
1/2
2B(ϑ ◦ φ)vν
h |g| dξ1 dξ2 =
2B(ϑ ◦ φ)vν0
h |g| dξ1 dξ2
∂ξ
∂ξ1
1
W
W+
Z
∂vν 1 1/2
+
2B(ϑ ◦ φ)vν0
h |g| dξ1 dξ2 .
∂ξ1
−
W
EJDE–2001/78
R. Bey, A. Heminna & J.-P. Lohéac
17
1/2
Setting ψ = (ϑ ◦ φ)h1 |g|1/2
, in W + , we have
Z
∂vν 1 1/2
2B(ϑ ◦ φ)vν0
h |g| dξ1 dξ2
∂ξ1
W+
Z
∂vν
=
2Bψ 2 vν0
dξ1 dξ2
∂ξ1
+
ZW
Z
0 ∂ψ
0 ∂(ψvν )
=
2Bψvν
dξ1 dξ2 −
Bψ |vν |2
dξ1 dξ2 .
∂ξ
∂ξ1
+
+
1
W
W
Thus
h Z
Bψ|vν |2
W+
iT ∂ψ
dξ1 dξ2 ≤ CE(u, S) .
∂ξ1
S
We know that ψ is compactly supported in W , and ψ = 0, on ∂W + . Define
function
G = ψvν , in W + × R+ ,
We have
Z
W+
2Bψvν0
G = 0 , in (R2 \ W + ) × R+ .
∂(ψvν )
dξ1 dξ2 =
∂ξ1
Z
2BG0
R2
∂G
dξ1 dξ2 .
∂ξ1
Let Ĝ be the Fourier transform of G, with respect to ξ1 . We write
Z
Z
0 ∂(ψvν )
dξ1 dξ2 =
4Biπη1 Ĝ0 Ĝ dη1 dξ2 .
2Bψvν
∂ξ1
R2
W+
This implies
Z TZ
W+
S
But
Z
R2
2Bψvν0
h
∂(ψvν )
dξ1 dξ2 dt =
∂ξ1
Z
2Biπη1 |Ĝ|2 dη1 dξ2
R2
iT
.
S
η1 |Ĝ|2 dη1 dξ2 ≤ C1 kGk2H1/2 (R2 ) ≤ C2 kuν k2H1/2 (Γ1 ) .
Hence, using the energy functional and Proposition 3, we get
Z T Z
∂(ψvν )
2Bψvν0
dξ1 dξ2 dt ≤ CE(u, S) .
∂ξ
+
1
S
W
For the integral in W − , we replace a1 by −a1 , h1 by −h1 , respectively and
proceed as above. We can also get a similar result concerning the integral terms
containing h2 .
Finally, we obtain
Z T Z
2Bu0ν ∇T uν .hT dΓ dt ≤ CE(u, S) .
(30)
S
Γ1
Using εS (u),
hν u0T .∂ν uT = hν u0T .(2εS (u) − (∇T uν ) + ∂T νuT ) ,
on Γ1 ,
18
Boundary stabilization of a linear systems
EJDE–2001/78
and, for (23) and (24), respectively,
Z
Z
Z
C
0
2
4Bhν uT .εS (u) dΓ ≤ θ
|εS (u)| dΓ +
|u0 |2 dΓ ,
θ Γ1 T
Γ1
Γ1
Z
Z
0
2Bhν uT .(∂T ν)uT dΓ ≤ C
|u0T |2 + |uT |2 dΓ .
Γ1
(32)
Γ1
Now compute
Z TZ
S
(31)
hν u0T .∇T uν dΓ dt
Γ1
=
hZ
iT Z
hν uT .∇T uν dΓ −
hZ
iT
hν uT .∇T uν dΓ +
Γ1
=
Γ1
S
S
T
S
Z T
S
Z
hν uT .(∇T u0ν ) dΓ dt
Γ1
Z
u0ν div(kuT ) dΓ dt .
Γ1
T
Since divT (hν uT ) = hν divT (uT ) + ∇T hν .uT , Proposition 1 gives
Z
Z
θ
2C
|u0 |2 dΓ .
(33)
2Bu0ν div(hν uT ) dΓ ≤ kuT k21 +
T
2
θ
Γ1
Γ1
R
Now consider Γ1 hν uT .∇T uν dΓ. Given t > 0, let ζ be in H1 (Γ1 ) (notice that
H1 (Γ1 ) = H10 (Γ1 )) such that
ζ − ∆T ζ = div(uT )(t) .
T
Since divT (uT )(t) belongs to H−1/2 (Γ1 ), ζ satisfies
kζkH1 (Γ1 ) ≤ CkuT (t)kL2 (Γ1 ,T (Γ1 )) ,
3/2
ζ∈H
(Γ1 ) and kζkH3/2 (Γ1 ) ≤ CkuT (t)kH1/2 (Γ1 ,T (Γ1 )) .
Then we have
Z
hν uT .∇T uν dΓ
Γ1
Z
= −
uν div(hν uT ) dΓ
T
Γ1
Z
Z
= −
uν ∇T hν .uT dΓ −
Γ1
Γ1
uν hν ζ dΓ +
Z
uν hν ∆T ζ dΓ .
Γ1
First, thanks to (34), we have
Z
Z
uν ∇T hν .uT dΓ ≤ C
|u|2 dΓ ,
Γ1
Γ1
Z
Z
Z
2
2
uν hν ζ dΓ ≤ C
(|uν | + |ζ| ) dΓ ≤ C
|u|2 dΓ .
Γ1
Γ1
Γ1
(34)
EJDE–2001/78
R. Bey, A. Heminna & J.-P. Lohéac
19
Second
−
Z
uν hν ∆T ζ dΓ =
Z
Γ1
(−∆T )1/4 (uν hν )(−∆T )3/4 ζ dΓ ,
Γ1
and, again with (34),
Z
uν hν ∆ζ dΓ ≤ Ckuν kH1/2 (Γ1 ) kζkH3/2 (Γ1 ) ≤ Ckuk2H1 (Ω) .
Γ1
Hence
Z
hν uT .∇T uν dΓ ≤ C
Γ1
Z
Γ1
|u|2 dΓ + kuk2H1 (Ω) .
Using Poincaré’s inequality and Korn’s inequality, we finally get
Z
2Bhν uT .∇T uν dΓ ≤ CE(u, t) .
(35)
Γ1
Observing that the energy functional is non-increasing and using (33), (35), we
obtain
Z T
Z Z
T
0
2Bhν uT .∇T uν dΓ dt ≤CE(u, S) + θ
kuT k21 dt
S
Γ1
S
C
+
θ
Z
T
S
Z
|u | dΓ dt .
Γ1
Again, we use boundedness of h and get
Z
Z
Z
C
0
2
2Bhν uν ∂ν uν dΓ ≤ θ
|∂ν uν | dΓ +
|u0 |2 dΓ .
θ
Γ1
Γ1
Γ1
Finally, with (28)–(32), (36) and (37), we obtain
Z TZ
|I2 | ≤θ
εT (uT ) : εT (uT ) + |εS (u)|2 + |∂ν uν |2 dΓ dt
S
C
+
θ
Z
Γ1
T
S
Z
2
(36)
0 2
(37)
(38)
0 2
(|u| + |u | ) dΓ dt + CE(u, S) .
Γ1
Again, we emphasize that, in (38), θ is a positive number to be chosen later and
C is a positive constant which does not depend on u.
Final segment of the proof.
From (21), (27), (38), we obtain two positive constants C6 and C7 such that
Z Z
Z T
C7 T
C1
E dt ≤C6 E(u, S) +
(|u|2 + |u0 |2 ) dΓ dt
θ
S
S
Γ1
Z TZ
+ 2θ
εT (uT ) : εT (uT ) + |εS (u)|2 + |∂ν uν |2 dΓ dt (39)
S
− kα
Z
Γ1
T
S
Z
Γ1
εT (u) : εT (u) + 2|εS (u)|2 + |∂ν uν |2 dΓ dt .
20
Boundary stabilization of a linear systems
EJDE–2001/78
From the relations εT (u) = εT (uT ) + εT (uν ν) = εT (uT ) + uν ∂T ν on Γ, we have
εT (u) : εT (u)
= εT (uT ) : εT (uT ) + 2εT (uT ) : εT (uν ν) + εT (uν ν) : εT (uν ν) , on Γ1 .
Using |εT (uT ) : εT (uν ν)| ≤ θεT (uT ) : εT (uT ) + (4θ)−1 εT (uν ν) : εT (uν ν), we get
1
εT (uν ν) : εT (uν ν) , on Γ1 .
2θ
R
R
R
Since Γ1 εT (uν ν) : εT (uν ν) dΓ = Γ1 |uν |2 (∂T ν : ∂T ν) dΓ ≤ C Γ1 |uν |2 dΓ, we deduce from (39) that there exists C8 > 0 such that
εT (u) : εT (u) ≥ (1 − 2θ)εT (uT ) : εT (uT ) + 1 −
C1
Z
T
E dt
S
≤ C6 E(u, S) +
+2θ
T
Z
Z
S
−kα
Γ1
T
Z
S
Z
Γ1
C8
θ
Z
T
S
Z
(|u|2 + |u0 |2 ) dΓ dt
Γ1
εT (uT ) : εT (uT ) + |εS (u)|2 + |εν (u)|2 dΓ dt
(1 − 2θ)εT (uT ) : εT (uT ) + 2|εS (u)|2 + |εν (u)|2 dΓ dt .
Then, for θ > 0 small enough, we can find a positive constant C9 such that
C1
Z
T
E dt ≤ C6 E(u, S) + C9
S
Z
T
S
Z
(|u|2 + |u0 |2 ) dΓ dt .
Γ1
From Proposition 3 and Lemma 5, there exists C10 > 0 such that, for every
η > 0,
Z T
Z T
C10
E(u, S) + η
C1
E dt ≤
E dt .
η
S
S
Hence, for η small enough, we get the theorem by applying Lemma 1 with
ω = (C1 − η)η/C10 . Now, we can observe that all above constants do not
depend on the strong solution u of (3). Hence, by a denseness argument, this
result can be extended to a weak solution of (3).
3.1
Proof of Theorem 2
We now show that Theorem 1 can be applied with the vector field
e
h(x) = (x − x0 ) + ρh(x)
,
e ∈ C 1 (Ω)
where ρ is some positive constant and h
e = 0,
h
on Γ0 ,
e =ν,
h
3
is such that
on Γ1 .
EJDE–2001/78
R. Bey, A. Heminna & J.-P. Lohéac
21
Note that h satisfies (5). Indeed,
h(x).ν(x) = (x − x0 ).ν(x) ≤ 0 , if x ∈ Γ0 ,
h(x).ν(x) = (x − x0 ).ν(x) + ρ > 0 , if x ∈ Γ1 .
Also note that h satisfies (6). We will consider two cases.
First case: meas(Γ0 ) 6= 0. Here we choose βh = 0. Then
Z
Z
Z
σij (ξ)hk,j ξi,k dx =
σij (ξ)ξi,j dx + ρ
σij (ξ)e
hk,j ξi,k dx .
Ω
Ω
Ω
3
e ∈ C 1 (Ω) , using Korn’s inequality, we can find a
Since ξ ∈ H1Γ0 (Ω) and h
e > 0 such that
constant C(h)
Z
Z
e
σij (ξ)e
hk,j ξi,k dx ≤ C(h)
σ(ξ) : ε(ξ) dx ,
Ω
and
Z
Ω
Ω
e
σij (ξ)hk,j ξi,k dx ≥ 1 − ρC(h)
Z
σ(ξ) : ε(ξ) dx .
Ω
e and get αh > 0 for ρ small enough.
We choose αh = 1 − ρC(h)
Second case: meas(Γ0 ) = 0. Since meas(Γ1 ) 6= 0, the map
Z
Z
1/2
ξ 7→
σ(ξ) : ε(ξ) dx +
|ξ|2 dΓ
Ω
Γ1
defines an equivalent norm on H1 (Ω) [15]. We have
Z
Z
Z
σij (ξ)hk,j ξi,k dx =
σij (ξ)ξi,j dx + ρ
σij (ξ)e
hk,j ξi,k dx .
Ω
Ω
Ω
3
e > 0 such that
e ∈ C 1 (Ω) , we can find a constant C(h)
Since ξ ∈ H1 (Ω) and h
Z
Z
Z
e
e
σij (ξ)hk,j ξi,k dx ≤ C(h)
σ(ξ) : ε(ξ) dx +
|ξ|2 dΓ ,
Ω
Ω
Γ1
and
Z
Ω
e
σij (ξ)hk,j ξi,k dx ≥ 1 − ρC(h)
Z
Ω
e
σ(ξ) : ε(ξ) dx − C(h)
Z
|ξ|2 dΓ .
Γ1
e which is positive for ρ small enough, and
Then we choose αh = 1 − ρC(h),
e
βh = −C(h).
Now one can easily show that the other conditions in (6) are satisfied if
1
2 − γx−x0
3
ρ < min
,
,
.
e 1 + 2C(h)
e + max (div(h))
e − min (div(h))
e
e
C(h)
|minΩ (div(h))|
Ω
Ω
This completes the proof.
22
Boundary stabilization of a linear systems
EJDE–2001/78
References
[1] F. Alabau, V. Komornik: Boundary observability, controllability, and stabilization of linear elastodynamic systems, SIAM Journal on Control and
Optimization, Vol. 37, Nr 2, 1999, 521–542.
[2] R. Bey, A. Heminna, J.-P. Lohéac: Stabilisation frontière du système de
l’élasticité. Nouvelle approche, C.R. Acad. Sci. Paris, série I Math. 330,
2000, 563–566.
[3] R. Bey, A. Heminna, J.-P. Lohéac: Stabilisation frontière du système de
l’élasticité linéaire anisotrope, C.R. Acad. Sci. Paris, to appear.
[4] A. Guesmia: On linear elasticity systems with variable coefficients, Kyushu
J. Math., 52 (1998), 227-248.
[5] A. Guesmia: Observability, controllability and boundary stabilization of
some linear elasticity systems, Acta Scientiarum Mathematicarum, Vol.
64, Nr 1-2, 1998, 109–120.
[6] A. Guesmia: Existence globale et stabilisation frontière non lináire d’un
système d’élasticité, Portugaliæ Mathematica, Vol. 56, Nr 3, 1999, 361–
379.
[7] A. Guesmia: On the decay estimates for elasticity systems with some localized dissipations, Asymptotic Analysis, Vol. 22, Nr 1, 2000, 1–14.
[8] M.A. Horn: Implications of sharp trace regularity results on boundary
stabilization of the system of linear elasticity, Journal of Mathematical
Analysis and Applications , 223, (1998), p. 126-150.
[9] V. Komornik: Exact controllability and stabilization; the multiplier
method, Masson-John Wiley, Paris, 1994.
[10] V. Komornik: Stabilisation rapide de problèmes d’évolution linéaires,
C.R.Acad. Sci. Paris, 321, série I (1995) p. 581-586.
[11] J.E. Lagnese: Boundary stabilization of linear elastodynamic systems.
SIAM J. Control Opt., 21, 1983, 968–984.
[12] J.E. Lagnese: Uniform asymptotic energy estimates for solutions of the
equations of dynamic plane elasticity with nonlinear dissipation at the
boundary, Nonlinear Anal. TMA, 16, 1991, 35–54.
[13] I. Lasiecka, R. Triggiani: Uniform exponential energy decay of wave equations in a bounded region with L2 (0, ∞; L2 (Γ))-feedback control in the
Dirichlet boundary conditions, Journal of Differential Equations, 66, 1987,
340–390.
EJDE–2001/78
R. Bey, A. Heminna & J.-P. Lohéac
23
[14] K. Lemrabet: Étude de divers problèmes aux limites de Ventcel d’origine
physique ou mécanique dans des domaines non réguliers,
Thesis,
U.S.T.H.B., Alger, 1987.
[15] J.-L. Lions: Contrôlabilité exacte, perturbation et stabilisation de systèmes
distribués, Masson, Paris, 1986.
[16] J.-L. Lions, E. Magenes: Problèmes aux limites non homogènes et leurs
applications, Dunod, Paris, 1968.
[17] A. Pazy: Semigroups of Linear Operators and Applications to Partial Differential Equations (Applied Mathmatical Science, 44) Springer, New York,
1983.
[18] R. Valid: La mécanique des milieux continus et le calcul des structures,
Eyrolles, Paris, 1977.
Rabah Bey (e-mail: bey@ec-lyon.fr)
Jean-Pierre Lohéac (e-mail: loheac@ec-lyon.fr)
E.C.L., D.M.I., C.N.R.S. U.M.R. 5585,
B.P. 163, 69131
Écully Cedex, France
Amar Heminna
U.S.T.H.B., Institut de Mathématiques,
B.P. 32, El-Alia, 16111 Alger, Algeria
e-mail: ahemina@hotmail.com