Journal of Inequalities in Pure and
Applied Mathematics
http://jipam.vu.edu.au/
Volume 4, Issue 1, Article 9, 2003
FUNDAMENTAL INEQUALITIES ON FIRMLY STRATIFIED SETS AND SOME
APPLICATIONS
SERGE NICAISE AND OLEG M. PENKIN
U NIVERSITÉ DE VALENCIENNES ET DU H AINAUT C AMBRÉSIS
MACS
I NSTITUT DES S CIENCES ET T ECHNIQUES DE VALENCIENNES
59313 - VALENCIENNES C EDEX 9, F RANCE .
serge.nicaise@univ-valenciennes.fr
VORONEZH S TATE U NIVERSITY
U NIVERSITETSKAJA PL ., 1
394000 VORONEZH , RUSSIA .
Received 13 May, 2002; accepted 11 October, 2002
Communicated by M.Z. Nashed
A BSTRACT. We establish different fundamental inequalities on a class of multistructures, more
precisely Poincaré’s inequality for second and fourth order (scalar) operators as well as Korn’s
inequality for the elasticity systems. Some consequences to the corresponding variational problems are deduced.
Key words and phrases: Poincaré’s inequality, Korn’s inequality, Multistructures.
2000 Mathematics Subject Classification. 35J50, 35R05, 35Q72.
1. I NTRODUCTION
Partial differential equations on multistructures is one of the most popular areas of the general theory of differential equations with a wide range of applications in continuous mechanics,
aerodynamics, biology, and others (see for example [3]). In that field the important problems
are solvability, regularity of the solution, spectral theory, control problems and numerical approximations of the solutions. For different aspects of that kind of considerations we may refer
to [2, 3, 4, 5, 7, 15, 17] and the references cited there.
As usual, the first step is to look at the solvability of the boundary value problems which
depends on the smoothness of the coefficients of the differential equations and on the regularity
of the boundaries of the domains where the differential equations are considered. For multistructures these aspects have to be combined with the geometry and the algebraic structure of
the domain. The main goal of that paper is to answer to this question for different operators on
a class of multistructures, called stratified sets. For both examples the main ingredient is the
ISSN (electronic): 1443-5756
c 2003 Victoria University. All rights reserved.
This work was supported by Grant of Russian Foundation of Basic Researches: 01-01-00417.
051-02
2
S ERGE N ICAISE AND O LEG M. P ENKIN
validity of a fundamental inequality of Poincaré’s type that we first establish. Analogous results were presented in [12] in pure geometrical form where we proved that the so-called firmly
connectedness of the stratified set guarantees the validity of Poincaré’s inequality and then the
solvability of the Dirichlet problems in Sobolev’s type spaces. For perforated domains a similar
answer was found by V.V. Zhikov [23] in a pure analytical form.
This paper may be then considered as a second part of [12] but is devoted to new developments and applications of our previous results. Indeed the results given here are more general
on several aspects: first we extend our notion of firmly connectedness, this new notion allows
us to combine the algebraic structure and the geometry of the domains with mechanical considerations. We further give applications to second order elliptic (scalar) operators but also to
fourth order elliptic (scalar) operators (models of beams and plates) as well as for the elasticity
system.
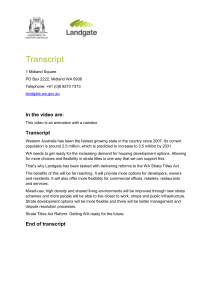
Figure 1.1: An example of stratified set
Before going on let us illustrate our considerations by the following example: consider a
mechanical system Ω, lying in the plain Π and consisting of strings and membranes as shown in
Figure 1.1. Dotted lines on this figure are the places where the membranes adjoin to each other
directly. Full lines represent the strings, in that last case the membranes adjoin to each other
indirectly. In both cases we assume that there exist a one-dimensional element (stratum) σ1i
between two-dimensional ones. In the case when σ1i is a string we call it elastic, in the opposite
case, i.e. when σ1i is a place of direct adjoining of membranes we call it a soft stratum. On the
above figure σ12 is an elastic stratum and σ11 is a soft one. It is convenient to imagine that in
both cases we have strings but the soft ones are not stretched. We assume all membranes to be
stretched (i.e. all two-dimensional strata are elastic).
Let us denote by p : Ω → R a function which describes the elasticity of the system. The
function p then vanishes in the interior of the soft strata and is a positive constant pki in the
elastic stratum σki . Let f be a small force which acts orthogonally to the plane Π. Small
displacements u : Ω → R caused by this force are solution of the following collection of
differential relations (the notation σ2j σ1i means that σ1i adjoins to σ2j ):
−p∆u(x) = f (x)
on two-dimensional strata and
X ∂u ∂2u
−p 2 (x) −
p
(x) = f (x),
∂τ
∂ν |2j
σ σ
2j
1i
when x lies in the one-dimensional stratum σ1i . When x lies in σ1i we denote by ~τ (x) any
tangent direction to σ1i . Besides we denote by ~ν the unit vector directed to the interior of some
σk+1j σki orthogonally to σki . The notation
w|kj (x)
J. Inequal. Pure and Appl. Math., 4(1) Art. 9, 2003
http://jipam.vu.edu.au/
F UNDAMENTAL I NEQUALITIES ON F IRMLY S TRATIFIED S ETS AND S OME A PPLICATIONS
3
means the extension of the restriction w|σkj by continuity to σ kj . When x belongs to some
null-dimensional stratum σ0i (like σ01 on the above figure), we have
X ∂u −
p
(x) = f (x).
∂ν
|1j
σ σ
1j
0i
One can show (see [22]) that the left-hand sides of the last three equations may be rewritten
in the divergence form
−∇(p∇u) = f,
where the divergence operator ∇ may be defined in a classical manner, as the density of the
flow of the vector field with respect to a special “stratified” measure on Ω (more details will be
given in the next section).
Adding boundary conditions to the above system, the goal is to find sufficient conditions
guaranteeing the solvability of that problem. A positive answer of that problem is given in [12]
if all strata are elastic. In the next sections we will extend these results to the case explained
here, i.e., when some strata are soft.
The schedule of the paper is the following one: After recalling some basic notions in Section
2, we prove in Section 3 the “standard” Poincaré’s inequality on stratified sets under a firmly
connectedness property. In Section 4 we give applications to some variational inequalities.
Section 5 is devoted to Poincaré’s inequality for fourth order operators and an application to
the solvability of some boundary value problems with such operators. Finally in Section 6 we
prove Korn’s inequality on stratified sets and present applications to the elasticity system.
2. S OME P RELIMINARIES
Here we recall some basic definitions on stratified sets. For more details we refer to [12].
Since our considerations are rather sophisticated we also present some examples (see also the
simple example of the previous section).
A connected set Ω in Rn is said to be stratified if there exists a finite sequence of closed
subsets of Rn
(2.1)
Ωk0 ⊂ Ωk1 ⊂ · · · ⊂ Ωkm = Ω when k0 < k1 < · · · < km ,
with the following properties:
i) Ωki \ Ωki−1 is a smooth submanifold in Rn of dimension ki . Its connected components
will be called ki -dimensional strata and will be denoted by σki j . The second index serves
for the numeration of the strata. We shall assume that there is a finite number of strata
in Ω and that each of them has a compact closure in Rn . It is important to notice that
the boundary of the stratum is piecewise smooth, because it consists of strata. However,
it could have some singularities like cracks, cuspidal edges and so on. In order to avoid
some serious difficulties we then assume that the boundary of the strata is Lipschitz.
ii) The boundary ∂σki = σ ki \ σki of each stratum σki with k ≥ 1 is a union of strata σmj
with m < k. We write σmj ≺ σki if σmj ⊂ ∂σki .
iii) If σk−1,j ≺ σki and y ∈ σki tends to x ∈ σk−1,j along some continuous curve, then
the tangent space Ty σki has a limit position lim Ty σki which contains the tangent space
y→x
Tx σk−1,j .
The sequence (2.1) is called a stratification of Ω. Each set can be stratified in several ways.
More exactly a stratified set is a triple (Ω, S, φ), where Ω is an initial set, S is a stratification
like (2.1) and φ describes how to construct Ω using all the pieces σki . Nevertheless we shall
refer to Ω itself as a stratified set (with fixed S and φ).
Before going on, let us present some examples of stratified sets:
J. Inequal. Pure and Appl. Math., 4(1) Art. 9, 2003
http://jipam.vu.edu.au/
4
S ERGE N ICAISE AND O LEG M. P ENKIN
• One-dimensional networks (see [2, 4, 15, 16, 17, 21]), where 0-d strata are the vertices
and 1-d strata are the edges.
• Two-dimensional polygonal topological networks in the sense of [17], in that case, 1-d
strata are the edges and 2-d strata are the faces of the network.
• Take the unit cube of R3 with the following stratification: the vertices are the 0-d strata,
the edges are the 1-d strata, the faces are the 2-d strata and finally the interior of the
cube is the 3-d stratum.
• Take for 1-d strata two concentric circles of the plane and as 2-d stratum the area between them.
• In the plane, take as 0-d strata the points σ04 = (0, 0), σ02 = (1, 0), σ01 = (2, 0) and
σ03 = (0, 1), as 1-d strata the intervals (σ04 , σ02 ), (σ02 , σ01 ), (σ02 , σ03 ) and (σ04 , σ03 )
and finally as 2-d stratum the triangle of vertices σ02 , σ03 , σ04 .
• Take as n-d stratum (n ≥ 1) a bounded open set O of Rn with a smooth boundary and
as (n − 1)-d stratum the boundary of O.
The set Ω inherits the topology from Rn . In terms of this topology we fix in Ω some connected
and open subset Ω0 consisting of some strata of Ω and such that Ω0 = Ω. The complement
Ω \ Ω0 = ∂Ω0 is the boundary of Ω0 in Ω. The set Ω0 plays the role of a classical domain where
a partial differential equation is considered while ∂Ω0 corresponds to the classical boundary. In
this paper we always assume that Ω 6= Ω0 , i.e. ∂Ω0 6= ∅.
The set of strata of Ω0 is divided in two groups. The first one consists of so-called elastic
strata. The second one is the set of so-called soft strata. That division is motivated by the
example of the previous section as well as problems considered in [1, 6, 7, 9, 17, 18, 20].
We assume null-dimensional strata to be soft (since a point has no mechanical properties like
elasticity). So, in contrast to [12] the set Ω0 has an additional mechanical structure in form of
the above mentioned division in elastic and soft strata. In the sequel E(Ω0 ) will denote the set
of elastic strata and S(Ω0 ) the set of soft strata.
Now we introduce in Ω a “stratified” measure µ by means of the following expression
X
µ(ω) =
µk (ω ∩ σki ),
σki ⊂Ω
where µk is the usual k-dimensional Lebesgue measure on σki . A subset ω of Ω for which
this formula makes sense will be called µ-measurable. Obviously the µ-measurability of ω is
equivalent to the measurability in the Lebesgue sense of all “traces” ω ∩ σki .
We can then define Lebesgue’s integral with respect to this measure. One can show that for
an integrable function f : Ω → R its integral is equal to the sum of the Lebesgue integrals over
the sets σki . In other words we have
Z
XZ
f dµ.
f dµ =
Ω
σki
In the right-hand side we write dµ instead of dµk because dµ(ω ∩σki ) = dµk (ω ∩σki ) according
to our definition.
We now introduce some functional spaces on a stratified set that will be useful later on.
• Cσ (Ω0 ) is the set of functions with continuous restrictions uki (such restrictions might
also be denoted by u|σki or u|ki ).
• C(Ω0 ) is the set of continuous functions on Ω0 .
• Cσ1 (Ω0 ) is the set of functions u : Ω → R such that for each σkj the restriction ukj has
continuous first order partial derivatives with respect to the local coordinates on σkj and
these derivatives may be extended by continuity to those σk−1i ≺ σkj which are not
J. Inequal. Pure and Appl. Math., 4(1) Art. 9, 2003
http://jipam.vu.edu.au/
F UNDAMENTAL I NEQUALITIES ON F IRMLY S TRATIFIED S ETS AND S OME A PPLICATIONS
5
in ∂Ω0 . Note that a function in Cσ1 (Ω0 ) may be discontinuous (jumps are possible by
passage from one stratum to another one).
• C 1 (Ω0 ) = Cσ1 (Ω0 ) ∩ C(Ω).
• C01 (Ω0 ) is the set of functions from C 1 (Ω0 ) vanishing on the boundary ∂Ω0 .
• L2µ (Ω0 ) is the completion of C(Ω0 ) with respect to the norm in C(Ω0 ) generated by the
inner product
Z
(u, v) =
uvdµ.
Ω0
◦
• H 1µ (Ω0 ) is the completion of C01 (Ω0 ) with respect to the norm k·k<> in C01 (Ω0 ) induced
by the inner product
Z
Z
hu, vi = uvdµ +
∇u · ∇vdµ.
Ω0
E(Ω0 )
Here above and below, for f ∈ C 1 (Ω0 ), the gradient ∇f is the collection of gradients on each
stratum, i.e. on the stratum σki it is the usual gradient of the restriction f|σki of f to σki .
Let F~ be a tangent vector field on Ω0 in the sense that for each x ∈ σk−1i ⊂ Ω0 , F~ (x)
belongs to the tangent space Tx (σk−1i ). Let x ∈ σk−1i and ω be a small portion of Ω0 containing
x. We should imagine ω as the intersection of Ω0 with some smooth domain G of Rn . If we
calculate the flow of F~ through the surface of ω and divide it by µ(ω) then we shall obtain an
approximated value of the divergence ∇F~ (x). Exact calculations give the following expression
for the divergence
X
∇F~ (x) = ∇k−1 F~ (x) +
~ν · F~|kj (x),
σkj σk−1i
where ∇k−1 is the usual (k − 1)-dimensional divergence operator on σk−1i . Note that we use
the tradition of Physicians to denote the divergence and the gradient by the same symbol ∇.
For some function p ∈ Cσ (Ω0 ) we can now define the elliptic operator
∆p u = ∇(p∇u)
on Ω0 . In the full paper we will assume that p ≡ 0 on the soft strata and that p is positive on the
elastic ones.
In [12] we have considered the Dirichlet problem
∆p u(x) = f (x)
u=0
x ∈ Ω0 ,
on ∂Ω0 ,
when the set of soft strata is empty. The solvability of that problem is based on the so-called
Poincaré inequality in Ω0 . Therefore our first goal is to extend this inequality to the case when
the set of soft strata is not empty.
3. P OINCARÉ ’ S I NEQUALITY
We start with the following definition:
Definition 3.1. The triplet (E(Ω0 ), S(Ω0 ), ∂Ω0 ) is said to be firmly connected if for any stratum
σki of Ω0 , there exists a stratum σmj of ∂Ω0 and a firm chain joining σki to σmj in the following
sense: there exists a connected sequence σk1 i1 , σk2 i2 . . . , σkp ip with the following properties:
• σk1 i1 = σki , σkp ip = σmj and σkq iq ⊂ Ω0 when q 6= p,
• |kq+1 − kq | = 1 for each q < p and either σkq iq ≺ σkq+1 iq+1 or σkq iq σkq+1 iq+1 ,
J. Inequal. Pure and Appl. Math., 4(1) Art. 9, 2003
http://jipam.vu.edu.au/
6
S ERGE N ICAISE AND O LEG M. P ENKIN
• For 1 ≤ q ≤ p − 1, if σkq iq is a soft stratum then both σkq−1 iq−1 and σkq+1 iq+1 are elastic
and have a dimension equal to kq + 1 (except if q = 1 when only σk2 i2 is elastic and is
of dimension equal to k1 + 1).
We remark that in the above definition σkp−1 ip−1 is always elastic (since σkp ip is not elastic).
This implies that each stratum σki such that ∂σki ∩ ∂Ω0 6= ∅ is elastic. We further remark that
from this definition strata of higher dimension are elastic as well.
Remark 3.1. In [12] we take a subdomain Ω1 of Ω with the same properties than Ω0 and assume
that ∂Ω1 = ΓD ∪ ΓN (ΓD and ΓN being also union of strata of Ω), we finally introduce the
notion of a firmly connected pair (Ω1 , ΓD ). This definition is a particular case of our definition
since we can verify that if (Ω1 , ΓD ) is firmly connected (in the sense of [12]), then the triplet
(E(Ω0 ), S(Ω0 ), ∂Ω0 ) is firmly connected with the choice: E(Ω0 ) = Ω1 , S(Ω0 ) = ΓN and
∂Ω0 = ΓD . The applications given in [12] are also particular cases of applications given below.
Figure 3.1: Firm and not firm triplets
Figure 3.1 shows examples of firm and not firm triplets. The right example presents a non
firm triplet (E(Ω0 ), S(Ω0 ), ∂Ω0 ), when E(Ω0 ) = σ21 ∪ σ22 ∪ σ11 , S(Ω0 ) = σ12 ∪ σ02 and
∂Ω0 = σ01 ∪ σ03 , since there exists no firm chain joining σ21 to σ01 . On the left we can see a
firm triplet (E(Ω0 ), S(Ω0 ), ∂Ω0 ), with E(Ω0 ) = σ21 ∪ σ22 ∪ σ11 ∪ σ12 , S(Ω0 ) = σ02 and ∂Ω0
as before (the desired chain joining σ21 to σ01 is here σ21 , σ12 , σ02 , σ11 , σ01 ).
If Ω0 is a 1-d network (with the stratification described above) with elastic strata equal to 1-d
strata, with a nonempty boundary ∂Ω0 equal to a subset of 0-d strata, the other 0-d strata being
soft, then the triplet (E(Ω0 ), S(Ω0 ), ∂Ω0 ) is firmly connected. Let Ω0 be a two-dimensional
polygonal topological network Ω0 (with the stratification described above), and take as elastic
strata the two-dimensional strata, as well as a part of the one-dimensional strata, the other ones
being either soft or on the external boundary, then we get a firmly connected triplet.
Now we can formulate the main result of this section.
Theorem 3.2. Let (E(Ω0 ), S(Ω0 ), ∂Ω0 ) be a firmly connected stratified triplet. Then there
exists a positive constant C such that
Z
Z
2
u dµ ≤ C
|∇u|2 dµ
(3.1)
Ω0
E(Ω0 )
◦
for all u ∈ H 1µ (Ω0 ).
Our proof is based on the following two lemmas proved in [12].
J. Inequal. Pure and Appl. Math., 4(1) Art. 9, 2003
http://jipam.vu.edu.au/
F UNDAMENTAL I NEQUALITIES ON F IRMLY S TRATIFIED S ETS AND S OME A PPLICATIONS
7
Lemma 3.3. Let σk−1i ≺ σkj . Then there exists a positive constant C such that for all u ∈
H 1 (σkj ) the following inequality holds
Z
Z
Z
(3.2)
u2 dµ ≤ C u2 dµ + |∇u|2 dµ .
σk−1i
σkj
σkj
Lemma 3.4. Under the assumption of the previous lemma the following inequality also holds
Z
Z
Z
(3.3)
u2 dµ ≤ C
u2 dµ + |∇u|2 dµ .
σkj
σk−1i
σkj
Now we are ready to prove (3.1).
Proof of Theorem 3.2. Let σkj be an arbitrary stratum of Ω0 . We can connect it with some
stratum in ∂Ω0 by means of a firm chain of strata σk1 i1 , . . . σkp ip like in Definition 3.1. For
1 ≤ q < p we consider the stratum σkq iq . If σkq iq ⊂ S(Ω0 ) then σkq+1 iq+1 ⊂ E(Ω0 ) and
kq+1 = kq + 1 according to the definition of firmly connectedness and we can apply (3.2) to the
pair σkq iq , σkq+1 iq+1 . As a result we have
Z
Z
Z
|∇u|2 dµ ,
u2 dµ +
u2 dµ ≤ Cq
(3.4)
σkq+1 iq+1
σkq+1 iq+1
σkq iq
for some Cq > 0. In the case σkq iq ⊂ E(Ω0 ) and σkq+1 iq+1 ⊂ S(Ω0 ) (or ∂Ω0 ) we have kq+1 =
kq − 1 and we can apply (3.3) to obtain
Z
Z
Z
|∇u|2 dµ .
u2 dµ +
u2 dµ ≤ Cq
(3.5)
σkq iq
σkq+1 iq+1
σkq iq
Finally let us consider the case when both σkq iq and σkq+1 iq+1 are included in E(Ω0 ). In this case
both possibilities kq+1 = kq + 1 and kq+1 = kq − 1 are possible. Using (3.2) or (3.3) we obtain
(3.4) or (3.5).
It is important to note that in the right-hand sides of (3.4) and (3.5) we have integrals of |∇u|2
only over elastic strata, in other words (3.4) or (3.5) implies that
Z
Z
Z
X
|∇u|2 dµ .
u2 dµ ≤ Cq
u2 dµ +
(3.6)
σkq iq
q 0 =q,q+1:σk
q 0 iq 0
σkq+1 iq+1
⊂E(Ω0 )σ
kq 0 iq 0
By induction we get
Z
(3.7)
σkj
u2 dµ ≤ Ckj
Z
X
u2 dµ +
1≤q 0 ≤p−1:σk
q 0 iq 0
σkp ip
Z
⊂E(Ω0 )σ
|∇u|2 dµ ,
kq 0 iq 0
with Ckj = 2 max {C1 · · · Ci }. Taking into account that u vanishes on ∂Ω0 we obtain
1≤i≤p−1
Z
Z
Z
X
2
2
|∇u| dµ ≤ Ckj
|∇u|2 dµ.
u dµ ≤ Ckj
σkj
1≤q 0 ≤p−1:σk
J. Inequal. Pure and Appl. Math., 4(1) Art. 9, 2003
q 0 iq 0
⊂E(Ω0 )σ
kq 0 iq 0
E(Ω0 )
http://jipam.vu.edu.au/
8
S ERGE N ICAISE AND O LEG M. P ENKIN
Taking the sum on all strata we obtain (3.1) with C =
P
Ckj .
4. A PPLICATION TO S OME VARIATIONAL I NEQUALITIES
Here we discuss a standard obstacle problem. This is a generalization of the mechanical
problem illustrated by Figure 4.1 consisting of a finite number of membranes (two-dimensional
strata) and strings (one dimensional strata) initially stretched in the plane. For a general stratified
set Ω0 subdivided into the elastic strata E(Ω0 ) and the soft ones S(Ω0 ), let us fix p, q ∈ Cσ (Ω0 )
such that q ≥ 0 on Ω0 , p > 0 on E(Ω0 ) and p ≡ 0 on S(Ω0 ). Consider further f ∈ L2µ (Ω0 ) as
◦
a small force acting on our system and let φ be the obstacle which is assumed to be in H 1µ (Ω0 ).
Then the displacement u of the points of Ω0 is described by means of the following variational
problem
Z
Z
2
2
(4.1)
(p|∇u| + qu − 2f u)dµ = min (p|∇v|2 + qv 2 − 2f v)dµ,
v∈K
Ω0
Ω0
◦
where K is the convex and closed subset of H 1µ (Ω0 ) defined by
◦
(4.2)
K = {u ∈ H 1µ (Ω0 ) : u(x) ≥ φ(x) (x ∈ Ω0 )}.
Figure 4.1: A mechanical system with an obstacle.
◦
Remark 4.1. We give the weak formulation (in H 1µ (Ω0 )) of the problem, because it has no
classical solution even in the case when our mechanical system has no contact with the obstacle.
The classical solvability requires stronger conditions than firmly connectedness.
By the standard approach problem (4.1) may be reduced to the variational inequality: Find
u ∈ K solution of
(4.3)
a(u, v − u) − (f, v − u)µ ≥ 0, ∀v ∈ K,
where the form a(u, v) is defined by
Z
(4.4)
(p∇u · ∇v + quv)dµ.
a(u, v) =
Ω0
Theorem 4.2. Under the above assumptions if the triplet (E(Ω0 ), S(Ω0 ), ∂Ω0 ) is firmly connected, then the problem (4.3) has a unique solution in K.
J. Inequal. Pure and Appl. Math., 4(1) Art. 9, 2003
http://jipam.vu.edu.au/
F UNDAMENTAL I NEQUALITIES ON F IRMLY S TRATIFIED S ETS AND S OME A PPLICATIONS
9
Proof. The bounded and bilinear form a(u, v) is clearly coercive as an easy consequence of
Poincaré’s inequality. So, the assertion is a consequence of the well-known theorem about
variational inequalities in a Hilbert space (see, for example [10, 11]).
Remark 4.3. The set N = {x ∈ Ω0 : u(x) > φ(x)} is called the noncoincidence set of the
solution u. This set is clearly open and one can show that the above mentioned solution u of the
variational inequality (4.3) is a weak solution of
Z
Z
(p∇u∇ϕ + quϕ)dµ = f ϕdµ, ∀ϕ ∈ D(N ).
N
N
◦
If we take K = H 1µ (Ω0 ), then the variational inequality (4.3) becomes the variational identity:
◦
a(u, v) = (f, v)µ , ∀v ∈ H 1µ (Ω0 ).
In this case using Green’s formula on each stratum, u is a weak solution of
X
∂
−∆p uki + quki −
pk+1,j
uk+1,j
= fki in σki ,
∂ν
|σ
ki
σ ≺σ
ki
k+1,j
u = 0 on ∂Ω0 .
In the setting of Remark 3.1 this problem is exactly the one studied in Section 5 of [12]. Let us
further remark that this problem extends particular problems considered in [2, 4, 7, 15, 17, 19].
5. P OINCARÉ ’ S I NEQUALITY FOR F OURTH O RDER O PERATORS
In this section and the next one, we assume that the strata are flat in the sense that each σki
is included into a hyperplane of Rn of dimension k. Consequently we may fix a global system
of Cartesian coordinates on each stratum. Under this assumption we shall prove the following
Poincaré inequality, useful for boundary value problems involving fourth order operators (see
below for some applications).
As before we introduce the space Hµ2 (Ω0 ) as the closure of C 2 (Ω0 ) for the norm k·k2 induced
by the inner product
Z
Z
2
2
(u, v)2 = (u + |∇u| )dµ +
kH(u)k2 dµ,
Ω0
E(Ω0 )
where H(u) is the Hessian matrix of u defined on each stratum σki with Cartesian coordinates
(y1 , . . . , yk ) by
2
∂ uki
H(uki ) =
.
∂yl ∂ym l,m=1,...,k
The space C 2 (Ω0 ) is defined exactly as C 1 (Ω0 ) replacing first order derivatives by first and
second order derivatives.
Theorem 5.1. Let the triplet (E(Ω0 ), S(Ω0 ), ∂Ω0 ) be firmly connected such that each stratum
is flat in the above sense. Then there exists a positive constant C such that
Z
Z
2
2
(5.1)
(u + |∇u| )dµ ≤ C
kH(u)k2 dµ,
Ω0
E(Ω0 )
◦
for all u ∈ Hµ2 (Ω0 ) ∩ H 1µ (Ω0 ).
The proof of this estimate relies on Lemmas 3.3 and 3.4 as well as the so-called interpolation
inequalities (see for instance Theorem 1.4.3.3 of [14]):
J. Inequal. Pure and Appl. Math., 4(1) Art. 9, 2003
http://jipam.vu.edu.au/
10
S ERGE N ICAISE AND O LEG M. P ENKIN
Lemma 5.2. There exists a constant C such that for all > 0 and all u ∈ H 2 (σki ) it holds
Z
Z
Z
C
2
2
(5.2)
|∇u| dµ ≤ u dµ + 2 kH(u)k2 dµ.
σki
σki
σki
Lemma 5.3. Let σk−1,i ≺ σkj . Then there exists a constant C such that for all u ∈ H 2 (σkj ) we
have
Z
Z
Z
(5.3)
(u2 + |∇u|2 )dµ ≤ C u2 dµ + kH(u)k2 dµ .
σk−1,i
σkj
Proof. Applying Lemma 3.3 to
Z
2
|∇u| dµ ≤
∂u
∂yl
Z
k
X
l=1 σ
σk−1,i
σkj
with l = 1, . . . , k and summing on l, we may write
2
Z
Z
∂u
2
2
∂yl dµ ≤ C |∇u| dµ + kH(u)k dµ .
σkj
k−1,i
σkj
Thanks to the estimate (5.2) we obtain
Z
(5.4)
|∇u|2 dµ ≤ C
Z
u2 dµ +
σkj
σk−1,i
Z
kH(u)k2 dµ .
σkj
The estimates (3.2) and (5.2) directly yields
Z
Z
Z
(5.5)
u2 dµ ≤ C u2 dµ + kH(u)k2 dµ .
σk−1,i
σkj
σkj
We conclude by taking the sum of (5.4) and (5.5).
Lemma 5.4. Under the assumptions of the previous lemma the following inequality holds
Z
Z
Z
(5.6)
(u2 + |∇u|2 )dµ ≤ C
u2 dµ + kH(u)k2 dµ .
σkj
σk−1i
σkj
Proof. By the estimate (5.2), for any > 0 we have
Z
Z
Z
C
2
2
kH(u)k2 dµ.
|∇u| dµ ≤ u dµ + 2
σkj
Lemma 3.4 then yields
Z
Z
2
|∇u| dµ ≤ C
σkj
σkj
σkj
Z
2
u dµ + C
σk−1i
C
|∇u| dµ + 2
2
σkj
Z
kH(u)k2 dµ.
σkj
Choosing > 0 such that C < 1/2 we obtain
Z
Z
Z
|∇u|2 dµ ≤ C
u2 dµ + kH(u)k2 dµ .
σkj
σk−1i
This estimate and (3.3) directly yield (5.6).
J. Inequal. Pure and Appl. Math., 4(1) Art. 9, 2003
σkj
http://jipam.vu.edu.au/
F UNDAMENTAL I NEQUALITIES ON F IRMLY S TRATIFIED S ETS AND S OME A PPLICATIONS
11
Proof of Theorem 5.1. The arguments of Theorem 3.2 replacing Lemma 3.3 (resp. Lemma 3.4)
by Lemma 5.3 (resp. Lemma 5.4) directly lead to the conclusion.
Let us shortly give an application of the above Poincaré inequality to some boundary value
problems with fourth order operators. The problem considered below is actually an extension
of particular problems studied in [17, 18, 7, 9]. For each elastic stratum σki we introduce the
Young modulus Eki > 0 and the Poisson coefficient νki ∈ (0, 1) of the constitutive material of
Eki
the stratum σki . We then set pki = 1−ν
2 for each elastic stratum σki and pki = 0 for each soft
ki
stratum σki . With these notation we define the bilinear form a on any closed subspace V of
◦
Hµ2 (Ω0 ) ∩ H 1µ (Ω0 ) by
X
a(u, v) =
pki aki (uki , vki ),
σki ⊂E(Ω0 )
where we set
Z
aki (u, v) =
σki
(
)
X ∂2u ∂2v
∂2u
∂2v
∆u∆v − (1 − νki )
−
dy.
2
∂yl2 ∂ym
∂yl ∂ym ∂yl ∂ym
l6=m
Owing to Theorem 5.1 we shall show that this bilinear form is coercive on V , namely we
have (compare with Lemma 2.5 of [17] or Lemma 2.1 of [18]):
Lemma 5.5. There exists a positive constant α such that for all u ∈ V we have
a(u, u) ≥ αkuk22 .
(5.7)
Proof. By direct calculations we see that
)
Z (X
k 2 2
X ∂ 2 u 2
X ∂2u ∂2u
∂ u
aki (u, u) =
+(1 − νki )
dy.
∂y 2 + νki
2
∂yl2 ∂ym
∂yl ∂ym
σki
l
l=1
l6=m
l6=m
By Young’s type inequality
X
al am ≥ −
l6=m
k
X
|al |2 ,
l=1
valid for all real numbers al , we arrive at
)
Z (X
k 2 2
X ∂ 2 u 2
∂ u
aki (u, u) ≥ (1 − νki )
dy
∂y 2 +
∂yl ∂ym
σki
l
l6=m
l=1
Z
≥ (1 − νki )
kH(u)k2 dy.
σki
The conclusion follows from Poincaré’s inequality (5.1).
The so-called Lax-Milgram lemma allows to conclude the existence and uniqueness of the
solution u ∈ V of
Z
(5.8)
a(u, v) =
f v dµ, ∀v ∈ V,
Ω0
L2µ (Ω0 ).
for any f ∈
Let us give the interpretation of problem (5.8) in terms of partial differential equations in
◦
the special case V = Hµ2 (Ω0 ) ∩ H 1µ (Ω0 ). In that case for each stratum σki we introduce the
J. Inequal. Pure and Appl. Math., 4(1) Art. 9, 2003
http://jipam.vu.edu.au/
12
S ERGE N ICAISE AND O LEG M. P ENKIN
boundary operators
∂2u
(5.9)
Mki u := pki νki ∆u + (1 − νki ) 2 ,
∂ν
∂∆u
∂u
(5.10)
Nki u := pki
+ (1 − νki )∆T
∂ν
∂ν
on its boundary. Then by applications of Green’s formula we see that for u and v sufficiently
regular we have
Z
Z
∂v
2
− Nki uv dσ
pki aki (u, v) = pki
∆ uvdy −
Mki u
∂ν
σki
∂σki
Z
∂ ∂u
+ pki (1 − νki )
vdσ.
∂ν |∂σki
∂(∂σki ) ∂ν
◦
Using this identity in (5.8) we see that the solution u ∈ Hµ2 (Ω0 ) ∩ H 1µ (Ω0 ) of (5.8) is a weak
solution of
X
pki ∆2 uki +
Nk+1,j uk+1,j
σki ≺σk+1,j
+
X
σki ≺σk+1,j ≺σk+2,l
∂
pk+2,l (1 − νk+2,l )
∂ν
∂u
∂ν |σk+1,j
= fki in σki ,
|σki
Mki uki = 0 on ∂σki ,
u = 0 on ∂Ω0 .
Note that this problem extends boundary value problems studied in [7, 9] on one-dimensional
networks and in [17, 18] on two-dimensional ones.
6. KORN ’ S I NEQUALITY
The so-called Korn’s inequality is the basic ingredient for coerciveness property of problems
involving the elasticity system [8, 11]. We now show that this inequality is also valid on stratified sets. An application to the elasticity system on such sets will be presented at the end of the
section.
Let us first recall Korn’s inequality on one stratum σki (see for instance [13] for a proof of the
estimate below in the case of domains with a Lipschitz boundary), which says that there exists
a positive constant C such that
Z
Z
Z
2
2
2
(6.1)
|∇u| dy ≤ C
k(u)k dy +
|u| dy , ∀u ∈ H 1 (σki )k ,
σki
σki
σki
∂ul
∂um
where, as usual, (u) = (lm (u))kl,m=1 is the strain tensor: lm (u) = 12 ∂y
+
and for
∂yl
m
P
∂ul 2
shorthness we write |∇u|2 = kl,m=1 ∂y
.
m
This estimate and Lemma 3.3 directly lead to
Lemma 6.1. Let σk−1i ≺ σkj . Then there exists a constant C such that for all u ∈ H 1 (σkj )k
Z
Z
Z
(6.2)
|u|2 dµ ≤ C |u|2 dµ + k(u)k2 dµ .
σk−1i
J. Inequal. Pure and Appl. Math., 4(1) Art. 9, 2003
σkj
σkj
http://jipam.vu.edu.au/
F UNDAMENTAL I NEQUALITIES ON F IRMLY S TRATIFIED S ETS AND S OME A PPLICATIONS
13
The equivalent of Lemma 3.4 requires a more careful analysis and, to our knowledge, seems
to be new:
Lemma 6.2. Under the assumptions of the previous lemma we have
Z
Z
Z
(6.3)
|u|2 dµ ≤ C
|ut |2 dµ + k(u)k2 dµ ,
σkj
σk−1i
σkj
where ut is the tangent component of u on σk−1i , i.e.,
ut = u − (u · νkj )νkj on σk−1i .
Proof. Assume that the estimate (6.3) does not hold then there exists a sequence (un ) such that
Z
(6.4)
|un |2 dµ = 1,
σkj
Z
|ut,n |2 dµ +
(6.5)
σk−1i
Z
k(un )k2 dµ =
1
.
n
σkj
By Korn’s inequality (6.1) the sequence (un ) is bounded in H 1 (σkj )k and by the compact embedding of H 1 (σkj ) into L2 (σkj ) (Rellich-Kondrasov’s theorem), there exists a subsequence,
still denoted by (un ), which is convergent in L2 (σkj )k . By (6.5) and (6.1) the sequence is
convergent in H 1 (σkj )k . Denote its limit by u. By (6.4) and (6.5) it fulfils
Z
(6.6)
|u|2 dµ = 1,
σkj
ut = 0 on σk−1i ,
(6.7)
(u) = 0 in σkj .
(6.8)
This last property implies that u is a rigid body motion, i.e.,
u(y) = Ay + b, ∀y ∈ σkj ,
for some b ∈ Rk and an antisymmetric matrix A. Owing to the boundary condition (6.7), we
conclude that b = 0 and A = 0 and so u = 0, which is in contradiction with (6.6).
Now we define the space of vector valued functions on Ω0 : We first define C(Ω0 ) as the set
of functions such that its restriction uki to σki is in C(σki , Rk ) and such that for any strata σki
and σki0 with a common boundary σk−1,j , we have the “continuity” conditions:
uki = uki0 on σk−1,j ,
uk−1,j = uki − (uki · νki )νki on σk−1,j .
Note that the first condition implies that
uki − (uki · νki )νki = uki0 − (uki0 · νki0 )νki0 on σk−1,j .
We may now define C1 (Ω0 ) as the subspace of C(Ω0 ) such that its restriction uki to σki is
in C 1 (σki , Rk ), while C10 (Ω0 ) is the subspace of C1 (Ω0 ) of functions which are zero on ∂Ω0 .
◦
Finally we take H1µ (Ω0 ) as the closure of C10 (Ω0 ) for the norm induced by the inner product
Z
k
X Z X
∂ul ∂vl
(u, v) =
uvdµ +
dy.
Ω0
σki l,m=1 ∂ym ∂ym
σki ⊂E(Ω0 )
J. Inequal. Pure and Appl. Math., 4(1) Art. 9, 2003
http://jipam.vu.edu.au/
14
S ERGE N ICAISE AND O LEG M. P ENKIN
The arguments of the proof of Theorem 3.2 replacing Lemma 3.3 (resp. Lemma 3.4) by
Lemma 6.1 (resp. Lemma 6.2) lead to the following result that we may call Korn’s inequality
on stratified sets.
Theorem 6.3. Let the triplet (E(Ω0 ), S(Ω0 ), ∂Ω0 ) be firmly connected such that each stratum
is flat in the above sense. Then there exists a constant C such that
Z
Z
2
(6.9)
|u| dµ ≤ C
k(u)k2 dµ
Ω0
E(Ω0 )
◦
for all u ∈ H1µ (Ω0 ).
We finish this paper with an application to the elasticity system, extension of the notion
of transmission problems for the elasticity operators considered in [19, 20]: For each elastic stratum σki , we suppose that Hooke’s law holds, namely the stress tensor σ (ki) (uki ) =
(σlm (uki ))l,m=1,...,k is related to the strain tensor by the relation
(ki)
σlm (uki )
k
X
=
(ki)
clml0 m0 l0 m0 (uki ),
l0 ,m0 =1
(ki)
where the elastic moduli clml0 m0 are real constants, satisfy the standard symmetry relations
(ki)
(ki)
(ki)
(ki)
clml0 m0 = cl0 m0 lm = cmll0 m0 = clmm0 l0 , and the positiveness condition: there exists α > 0
such that
X
X
(ki)
|ξlm |2 , ∀ξlm ∈ R.
clml0 m0 ξlm ξl0 m0 ≥ α
l,m,l0 ,m0 =1,...,k
l,m=1,...,k
1
k
We now introduce the bilinear form ak on H (σki ) by
Z
X
(ki)
σlm (u)lm (v) dy.
aki (u, v) =
σki l,m=1,...,k
Note that the Lamé system is a particular case of the above one for a particular choice of
in that case one has
)
Z (
k
X
λki div u div v + 2µki
lm (u)lm (v) dy,
ak (u, v) =
(ki)
clml0 m0 ,
σki
l,m=1
where λki > 0 and µki > 0 are the Lamé constants of σki .
◦
Finally we define the bilinear form a on the space H1µ (Ω0 ) by
X
a(u, v) =
aki (uki , vki ).
σki ⊂E(Ω0 )
(ki)
The positiveness assumption on clml0 m0 and Korn’s inequality (6.9) lead to the coerciveness
of the form a. Consequently by the Lax-Milgram lemma, there exists a unique solution u ∈
◦
H1µ (Ω0 ) of
(6.10)
a(u, v) =
XZ
ki
◦
fki · vki dy, ∀v ∈ H1µ (Ω0 ),
σki
for any fki ∈ L2 (σki )k .
J. Inequal. Pure and Appl. Math., 4(1) Art. 9, 2003
http://jipam.vu.edu.au/
F UNDAMENTAL I NEQUALITIES ON F IRMLY S TRATIFIED S ETS AND S OME A PPLICATIONS
15
Applying Green’s formula we see that
Z
Z X
k
∂ (ki)
ak (u, v) = −
σlm (u)vm dy −
(σ (ki) (u) · ν) · vdσ.
∂y
l
∂σki
σki l=1
◦
Therefore the solution u ∈ H1µ (Ω0 ) of (6.10) is a weak solution of
k
X
X
∂ (ki)
−
σlm (uki ) −
∂yl
σ ≺σ
l=1
ki
(σ (k+1,j) (uk+1,j ) · ν)t = fki in σki ,
k+1,j
(σ (ki) (uk+1,j ) · ν) · ν = 0 on ∂σki ⊂ Ω0 ,
u = 0 on ∂Ω0 ,
with the convention that σ (ki) (uki ) = 0 on a soft stratum σki .
R EFERENCES
[1] F. ALI MEHMETI, Regular solutions of transmission and interaction problems for wave equations,
Math. Meth. Appl. Sc., 11 (1989), 665–685.
[2] F. ALI MEHMETI, Nonlinear Waves in Networks, Akademie-Verlag, 1994.
[3] F. ALI MEHMETI, J. VON BELOW AND S. NICAISE, (Eds), Partial differential equations on
multistructures, Lect. Notes in Pure and Appl. Math., 219, Marcel Dekker, 2001.
[4] J. VON BELOW, A characteristic equation associated to an eigenvalue problem on c2 -networks,
Linear Algebra and Appl., 71 (1985), 309–325.
[5] J. VON BELOW, Parabolic Network Equations, Habilitation Thesis, Eberhard-Karls-Universität
Tübingen, 1993.
[6] J. VON BELOW AND S. NICAISE, Dynamical interface transition with diffusion in ramified media, Communications in Partial Differential Equations, 21 (1996), 255–279.
[7] A. BOROVSKIKH, R. MUSTAFOKULOV, K. LAZAREV AND YU. POKORNYI, A class of
fourth-order differential equations on a spatial net, Doklady Math., 52 (1995), 433–435.
[8] P.G. CIARLET, The finite element method for elliptic problems, St. in Math. and its Appl., 4 (1978),
North-Holland.
[9] B. DEKONINCK AND S. NICAISE, The eigenvalue problem for networks of beams, Linear Algebra and its Applications, 314 (2000), 165–189.
[10] A. FRIEDMAN, Variation Principles and Free-boundary Problems, John Wiley and Sons, 1982.
[11] G. FICHERA, Existence Theorems in Elasticity, Handbuch der physik, Bd. 6a/2, Springer-Verlag,
1972.
[12] A. GAVRILOV, S. NICAISE AND O. PENKIN, Poincaré’s inequality on stratified sets and applications, Proceedings of the 7th International Conference EVEQ2000, to appear.
[13] J. GOBERT, Une inégalité fondamentale de la théorie de l’élasticité, Bull. Soc. Royale des Sciences
de Liège, 3-4 (1962), 182–191.
[14] P. GRISVARD, Elliptic Problems in Nonsmooth Domains, Pitman, Boston-London-Melbourne,
1985.
[15] J.E. LAGNESE, G. LEUGERING AND E.J.P.G. SCHMIDT, Modeling, Analysis and Control of
Dynamic Elastic Multi-link Structures, Birkhäuser, Boston, 1994.
J. Inequal. Pure and Appl. Math., 4(1) Art. 9, 2003
http://jipam.vu.edu.au/
16
S ERGE N ICAISE AND O LEG M. P ENKIN
[16] G. LUMER, Espaces ramifiés et diffusions sur les réseaux topologiques, C.R. Acad. Sc. Paris, Série
A, 291 (1980), 627–630.
[17] S. NICAISE, Polygonal interface problems, Methoden und Verfahren Math. Physik, 39 (1993),
Peter Lang Verlag.
[18] S. NICAISE, Polygonal interface problems for the biharmonic operator, Mathematical Methods in
the Applied Sciences, 17 (1994), 21–39.
[19] S. NICAISE AND A.M. SÄNDIG, General interface problems I-II, Mathematical Methods in the
Applied Sciences, 17 (1994), 395–429, 431–450.
[20] S. NICAISE AND A.M. SÄNDIG, Transmission problems for the Laplace and elasticity operators: Regularity and boundary integral formulation, Mathematical Models and Methods in Applied
Sciences, 9 (1999), 855–898.
[21] O.M. PENKIN, YU.V. POKORNYI AND E.N. PROVOTOROVA, On a vectorial boundary value
problem, Boundary value problems, Interuniv. Collect. Sci. Works, Perm’ 1983, 64–70.
[22] O. PENKIN, About a geometrical approach to multistructures and some qualitative properties of
solutions, in: F. Ali Mehmeti, J. von Belov and S. Nicaise (Eds.), Partial Differential Equations on
Multistructures, Marcel Dekker, 2001, 183–191.
[23] V.V. ZHIKOV, Connectedness and homogenization. Examples of fractal conductivity, Sb. Math.,
187(8) (1996), 1109–1147.
J. Inequal. Pure and Appl. Math., 4(1) Art. 9, 2003
http://jipam.vu.edu.au/