Mapping Russian Olive Using Remote Sensing to map an Invasive Tree
advertisement

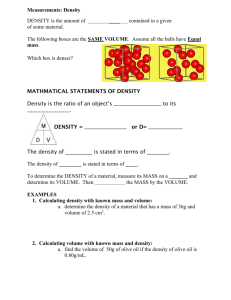
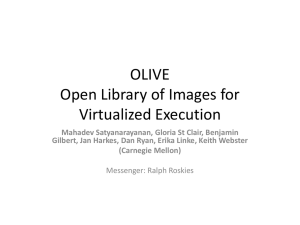
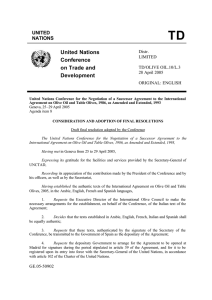
Mapping Russian Olive Using Remote Sensing to map an Invasive Tree September 2006 RSAC-0087-RPT1 1 United States Department of Agriculture Forest Service Remote Sensing Applications Center Abstract Hamilton, R.; Megown, K.; Lachowski, H.; Campbell, R. 2006. Mapping Russian olive: using remote sensing to map an invasive tree. RSAC-0087-RPT1. Salt Lake City, UT: U.S. Department of Agriculture Forest Service, Remote Sensing Application Center. 7 p. With funding from the Remote Sensing Steering Committee, a pilot project was initiated to develop a cost-effective method for mapping Russian olive (Elaeagnus angustifolia L.), an invasive tree species, from scanned large-scale aerial photographs. A study area was established along a riparian zone within a semiarid region of the Fishlake National Forest, located in central Utah. Two scales of natural color aerial photographs (1:4,000 and 1:12,000) were evaluated as part of the project. Feature Analyst, an extension for ArcGIS and several image processing software packages, was used to map the invasive tree. Overall, Feature Analyst located Russian olive (RO) throughout the imagery with a relatively high degree of accuracy. For the map derived from 1:4,000-scale photographs, the software correctly located the tree in 85 percent of all 4-by-4 meter transect cells where Russian olive was actually present. However, smaller trees were sometimes missed and the size of trees and groups of trees were frequently underestimated. The map derived from 1:4,000-scale photographs was only slightly more accurate than the map derived from 1:12,000-scale photographs, suggesting that the smaller scale photography may be adequate for mapping Russian olive. Key Words Russian olive, invasive species, remote sensing, Feature Analyst, large scale photos, accuracy assessment Authors Randy Hamilton is an Entomologist and Remote Sensing Specialist working at the Remote Sensing Applications Center and employed by RedCastle Resources. Kevin Megown is a Senior Project Leader and Biometrician working at the Remote Sensing Applications Center and employed by RedCastle Resources. Henry Lachowski is Program Leader for the Integration of Remote Sensing Program at the Remote Sensing Applications Center in Salt Lake City, Utah. Robert B. Campbell is an Ecologist working at the Fishlake National Forest in the Intermountain Region in Richfield, Utah. ii Table of Contents Abstract . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . ii Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1 Methods . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2 Results and Discussion . . . . . . . . . . . . . . . . . . . . . . . . . . . .4 Costs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .6 Conclusions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .7 References . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .7 iii iv Introduction Invasive plants (weeds) have infested hundreds of millions of acres of forest, rangeland, and grassland throughout the United States and pose a serious threat to ecosystem health and function, biodiversity, and endangered species (USDA Forest Service 2004). Annually, invasive plants invade an estimated 700,000 hectares of U.S. wildlife habitat (Babbitt 1998). The best defenses against invasive weeds are prevention, early detection, and eradication. However, once populations become well established, management objectives shift from eradication to containment—establishing a perimeter around the infestation, eliminating small outlying patches, and gradually reducing the perimeter of the primary infestation. At this stage, mapping established populations becomes critical. An accurate map provides baseline information and becomes a strategic planning tool for future management efforts. Combating invasive weeds without accurate baseline maps has been likened to fighting wildfires without knowledge of their locations (Dewey 1995). Unfortunately, the cost of traditional field-based mapping can, in some cases, be prohibitive. Russian olive (Elaeagnus angustifolia L.), a thorny shrub or tree with origins in Southeastern Europe and Western Asia, was intentionally introduced and planted in the United States for windbreaks, erosion control, wildlife habitat, and other horticultural purposes (figure 1) (Katz and Shafroth 2003). The tree is particularly well adapted to semiarid and saline environments. Early in the 20th century, Russian olive escaped cultivation and spread, particularly into moist riparian environments in arid or semiarid regions of the western United States (Stannard and others 2002). Although the invasive nature of Russian olive was known years ago, public and private agencies continued to promote planting it for various purposes as recently as the 1990s, and it is still commercially available (Katz and Shafroth 2003). Figure 1—Russian olive, an invasive tree, invades riparian environments in semiarid regions of the western United States. Photo courtesy of J. Scott Peterson, USDA NRCS, www.forestryimages.org Within the Fishlake National Forest (FLNF), located in central Utah, Russian olive invaded and became wellestablished in riparian zones of the more arid regions of the Forest. Because this tree was largely ignored until recently, when Sevier County designated it as a noxious weed, FLNF had not mapped the location and extent of the invasion. The Fishlake National Forest is proactive and has an aggressive weed management program. Nevertheless, budgetary constraints severely limit the scope of their weed management activities. The need to map Russian olive placed additional strain on the Forest’s limited budget. In 2005, the USDA Forest Service Remote Sensing Steering Committee awarded funding for a proposal submitted by the Fishlake National Forest to, in part, develop a cost-effective remote sensing alternative to field surveys for mapping Russian olive. Remote sensing has been used with varying degrees of success to map weed infestations (Hunt and others 2003; 1 | RSAC-0087-RPT1 Casady and others 2005; Lass and others 2005; Maheu-Girouxa and de Blois 2005). Biological and phenological characteristics that distinguish a weed from its surroundings, as viewed from above, are critical for successful mapping using remote sensing. Russian olive on the Fishlake National Forest was considered a good candidate for mapping because of the distinctive silver-gray color of its leaves, petioles, and current-year branchlets (figure 2) (Katz and Shafroth 2003). In addition, Russian olive trees are large compared to other invasive weeds and occur in dense stands. On the Fishlake National Forest, these trees are generally confined to sparsely vegetated areas along riparian corridors, which further increases the ease of mapping them using remote sensing. Specific objectives of this study were to evaluate and compare the utility of two scales of scanned natural color aerial photography for mapping Russian olive infestations within a pilot study area on the Fishlake National Forest. process of noting a few features that were correctly identified and others that were incorrectly identified; digitizing additional samples when features were missed in the classification; and finally, reprocessing the image. This iterative process continues until a satisfactory result is achieved. Although the output from Feature Analyst can be remarkably good, some manual editing may be required to produce the final map. Figure 2—The distinct silver/gray coloration of Russian olive foliage can distinguish it from its surroundings, making it a good target for mapping using remote sensing. Photo courtesy of Paul Wray, Iowa State University, www.forestryimages.org. Methods A pilot study area was established within the Fishlake National Forest along a six-mile segment of Salina Creek, just east of Richfield, Utah (figure 3). Natural color aerial photographs were acquired at 1:4,000 and 1:12,000 scales over the area on 11 September 2005 using a Zeiss RMK-A camera equipped with an 80mm lens. Negatives were subsequently scanned at 14 microns yielding 5.6 and 16.8 centimeter (0.18 and 0.55 foot) pixels for the respective scales. The digital images were then orthorectified using the Leica Photogrammetry Suite. For this study, Feature Analyst 4.0, an extension for ArcGIS, ERDAS Imagine, and other image processing software packages, was used to map Russian olive. The image classification method implemented in Feature Analyst is known as feature extraction. Unlike traditional image classification, feature extraction uses both spectral and spatial properties of an image to identify the feature of interest (tree crowns in our case). Feature Analyst “learns” to recognize features of interest through an iterative “training” process. First, the user digitizes a few sample features. Using the spectral and spatial information contained in the samples, Feature Analyst attempts to identify similar features in the imagery. The user then proceeds through an iterative Feature Analyst provides the user with several parameters to fine-tune the classifier to achieve optimal results. First, the user specifies a kernel or input representation, which approximates the size and shape of the feature of interest. To accommodate the circular shape of the Russian olive tree crowns, we used a circle input representation with a sevenpixel diameter for the 1:4,000-scale photography and a five-pixel diameter for the 1:12,000-scale photography (figure 4). Because Feature Analyst currently cannot process data sets larger than 2 GB, the imagery was cropped, eliminating some areas unsuitable for Russian olive establishment, then subset into sections slightly less than 2 GB in size. To increase processing speed, a resampling factor was set, which Figure 3—The study area, a six-mile section of Salina Creek, is located east of Richfield, Utah within the Fishlake National Forest. Natural color 1:4,000-scale scanned and orthorectified aerial photographs of the study area are shown overlaid on a shaded relief of the area. 2 | RSAC-0087-RPT1 Figure 4—A circle input representation, 7 pixels in diameter, was used to accommodate the circular shape of Russian olive tree crowns in the 1:4,000scale imagery. effectively allows the software to resample the imagery to a larger pixel size, thereby reducing the amount of data that is processed. For this study, resampling factors of 4 and 2 were set respectively for the 1:4,000 and 1:12,000-scale data. Default settings were accepted for all other parameters. The processing time was further reduced by creating a polygon mask to eliminate other regions of the imagery not suited for Russian olive establishment. imagery, no field visits were made prior to classifying the imagery. However, we visited the site as part of an accuracy assessment. To assess the accuracy of the map, the study area was sampled using a transect design. First, the study area was divided into 1-kilometer segments. Line transect (100-meters in length by 4meters wide, subdivided in 4-meter segments) were randomly located on the imagery within the riparian zone of every other 1-kilometer segment (figure 5). Transects were not allowed to cross the stream due to high water. Because of this constraint and because the riparian zone was relatively narrow (usually less than 100-meters on either side of the stream), transects generally paralleled the stream. The orientations of transects were fixed at some whole number multiple of 22.5 degrees from north. For each transect, a field datasheet with transect overlaid on the imagery was printed on a color laser printer. In July 2006, transects were located on the ground using a combination of GPS (global positioning system) units, transect locator maps, and the individual field datasheets. We walked the length of each transect. When Russian olive was encountered, the tree was outlined directly on the transect datasheet. Back at the office, outlines drawn on the transect datasheets were manually digitized over the imagery in ArcGIS. The digital transects were intersected with the digitized Russian olive tree outlines and with the Feature Analyst classification of Russian olive (figure 5). The percent composition of digitized and classified Russian olive was computed for each 4-by-4 meter transect cell. These data were then categorized using three different scales (for comparison). (A) the Daubenmire cover class scale, frequently used for collecting ecological data (0, <1, 1–5, 5–25, 25–50, 50–75, 75–95, and 95– 100 percent); (B) 10-percent intervals or classes (0, 0–10, 10–20, 20–30, 40– 50, 50–60, 60–70, 70–80, 80–90, and 90–100 percent); and (C) present/ absent intervals (classes). Contingency tables comparing the Feature Analyst classification to the field observations were created for the three different data categorizations for each scale of imagery as well as for the unedited and manually edited maps. The time required to train Feature Analyst can be reduced by training first on a small representative subset of the imagery, then applying the resulting model to the rest of the imagery. We evaluated this approach in several areas, but the results were generally unsatisfactory. Therefore, Feature Analyst was trained using an entire 2 GB section of imagery and retrained for each additional section. After Russian olive was mapped by Feature Analyst, the maps for the two scales of imagery were manually edited to eliminate obvious errors in the classification. Because of the high spatial resolution of the imagery and the relative ease of recognizing Russian olive on the Figure 5—A 100-meter accuracy assessment transect overlaid on 1:4,000-scale imagery. Transects were intersected with the Feature Analyst classification of Russian olive (blue) and the digitized polygons of Russian olive identified in the field (yellow). 3 | RSAC-0087-RPT1 Producer’s, user’s, and overall accuracy were computed from each contingency table as well as the kappa statistic (Lillesand and Kiefer 1994). To accommodate measurement errors resulting from sketching and digitizing the field data, the accuracy statistics were also computed using a 10-percent fuzzy tolerance applied to the 10percent interval categorization. In other words, we assumed that the true percentage of Russian olive in a cell could deviate from its computed percent-RO interval by as much as 10 percent, or one 10 percent interval above or below the computed interval. For example, if the percent Russian olive computed from digitized field data was in the 80–90 percent interval, then we assumed that the true value could fall within the 70–80, 80–90, or 90– 100 percent intervals. things as Russian olive. These errors of commission are addressed by the user’s accuracy. A high user’s accuracy, for example, tells us that almost everything mapped as Russian olive is Russian olive and that the analyst mislabeled very few other things as Russian olive. The kappa statistic measures the extent to which the accuracies are due to true agreement between the map and field verification data versus chance agreement. Kappa typically ranges between 0 and 1. A high kappa value indicates that the classification is much better than could be achieved by chance alone. Producer’s and user’s accuracies are measures of accuracy computed for each map class (e.g. each percent-RO class) in a classification, while overall accuracy is a summary statistic of the accuracies of all classes combined. Fundamentally, producer’s accuracy tells us how well the analyst mapped Russian olive actually found in the transects. For example, a high producer’s accuracy indicates that the analyst’s map correctly identified most Russian olive trees or, in other words, very few Russian olive trees were omitted or missed by the analyst’s map. However, producer’s accuracy does not tell us whether the analyst committed errors by incorrectly labeling other Results and Discussion The final output from Feature Analyst consisted of sets of polygons outlining Russian olive tree crowns or clumps of trees (figure 6). Depending on the specific data categorization and whether or not the map was edited, overall accuracies ranged from 70–91 percent for the 1:4,000-scale imagery and 67– 88 percent for the 1:12,000-scale imagery, with respective kappa statistics ranging from 0.49–0.81 and 0.39–0.73 (table 1). In general, the accuracy of the map derived from 1:4,000-scale imagery Figure 6—Map of Russian olive (blue outlines) created from 1:4,000-scale scanned aerial photographs using Feature Analyst. Table 1—Overall accuracies and kappa statistics for the edited and unedited Russian olive classifications derived from 1:4,000 and 1:12,000-scale imagery for each percent-RO categorization, as well as the fuzzy assessment of the 10-percent interval categorization. 1:4,000 Edited Categorization Overall (Percent) Kappa 1:4,000 Unedited Overall (Percent) Kappa 1:12,000 Edited Overall (Percent) Kappa 1:12,000 Unedited Overall (Percent) Kappa (A) Daubenmire classes 75 0.55 73 0.53 71 0.44 68 0.42 (B) 10 percent intervals* 74 (41) 0.52 (0.33) 70 (40) 0.49 (0.32) 69 (29) 0.42 (0.19) 67 (28) 0.39 (0.18) (B) 10 percent intervals* (fuzzy tolerance) 86 (71) 0.85 (0.60) 82 (71) 0.81 (0.61) 80 (54) 0.79 (0.37) 77 (54) 0.76 (0.37) (C) Present/ absent 91 0.81 88 0.75 88 0.73 86 0.69 * Overall accuracies and kappa statistics are presented both with and without (in parentheses) the 0-percent or absent class. The absent class had a disproportionately high 4 | RSAC-0087-RPT1 was better than that of the map derived from the 1:12,000-scale imagery. Nevertheless, the increase in accuracy was modest, suggesting that 1:12,000scale photography may be adequate for mapping Russian olive in many cases. Except for intervals (classes) containing either no Russian olive or a very high percentage of Russian olive, producer’s and user’s accuracies were quite low, ranging from only 3–46 percent and 4–48 percent respectively for the Daubenmire and 10-percent (nonfuzzy) categorizations (tables 2 and 3). In many cases, it appeared that the low accuracies for intermediate values of percent-RO were due to variability in how the field data were digitized and in how Feature Analyst drew the polygons. Because of this, we imposed a 10-percent fuzzy tolerance to the 10percent interval categorization (categorization B) accuracy assessment data. In addition to imposing the fuzzy tolerance, we also eliminated the 0percent or “absent” category from the fuzzy tolerance contingency table. This category had an exceptionally high number of samples (n=889) compared to the other categories (n<105), which confounded the accuracies (particularly the overall accuracies) and kappa statistics. The influence of the disproportionate number of samples on overall accuracy and the kappa statistic is illustrated in table 1, where these statistics are presented for the 10percent categorizations both with and without the absent category. Applying the fuzzy tolerance and removing the “absent” category increased the producer’s and user’s accuracies of the percent-RO intervals substantially, (compare tables 3 and 4). The overall ability of Feature Analyst to locate Russian olive was assessed by collapsing the contingency tables to two classes—present and absent. For both scales of imagery, overall accuracies were in excess of 85 percent (table 1). User’s Table 2—User’s and producer’s accuracies for Daubenmire percent-RO intervals (categorization A) for edited and non-edited RO classifications derived from 1:4,000 and 1:12,000-scale imagery. 1:4,000 Edited 1:4,000 Unedited 1:12,000 Edited 1:12,000 Unedited Percent-RO Intervals User’s Producer’s User’s Producer’s User’s Producer’s User’s Producer’s Absent 92% 95% 92% 90% 87% 96% 88% 91% <1 5% 5% 11% 14% 6% 10% 6% 10% 1–4.9 13% 19% 11% 16% 12% 8% 10% 8% 5–24.9 35% 35% 34% 41% 27% 27% 25% 29% 25–49.9 40% 36% 36% 36% 28% 21% 24% 22% 50–74.9 45% 43% 42% 46% 16% 11% 19% 14% 75–94.9 43% 41% 48% 43% 29% 29% 27% 27% 95–100 85% 57% 85% 66% 76% 45% 76% 45% Table 3—User’s and producer’s accuracies for 10 percent-RO intervals (categorization B) for edited and non-edited RO classifications derived from 1:4,000 and 1:12,000-scale imagery. 1:4,000 Edited 1:4,000 Unedited 1:12,000 Edited 1:12,000 Unedited Percent-RO Intervals User’s Producer’s User’s Producer’s User’s Producer’s User’s Producer’s Absent 92% 95% 92% 90% 87% 96% 88% 91% 0.01–9.9 40% 42% 33% 40% 32% 29% 29% 29% 10–19.9 21% 23% 20% 27% 17% 23% 14% 23% 20–29.9 19% 19% 19% 19% 14% 10% 12% 13% 30–39.9 16% 16% 15% 16% 7% 5% 6% 5% 40–49.9 18% 17% 16% 19% 11% 8% 10% 8% 50–59.9 29% 27% 21% 23% 5% 4% 4% 4% 60–69.9 25% 24% 23% 24% 7% 3% 6% 3% 70–79.9 19% 15% 18% 15% 10% 11% 10% 11% 80–89.9 30% 29% 30% 29% 9% 9% 6% 6% 90–100 87% 65% 82% 67% 73% 47% 73% 47% 5 | RSAC-0087-RPT1 Table 4—User’s and producer’s accuracies computed with a 10 percent fuzzy tolerance for 10 percent-RO intervals (categorization B) with the absent category removed for edited and non-edited RO classifications derived from 1:4,000 and 1:12,000-scale imagery. 1:4,000 Edited 1:4,000 Unedited 1:12,000 Edited 1:12,000 Unedited Percent-RO Intervals User’s Producer’s User’s Producer’s User’s Producer’s User’s Producer’s 0.01–9.9 71% 89% 78% 85% 53% 79% 54% 77% 10–19.9 68% 82% 73% 80% 51% 71% 51% 72% 20–29.9 60% 72% 65% 72% 46% 55% 44% 57% 30–39.9 53% 57% 52% 57% 39% 41% 36% 42% 40–49.9 54% 56% 51% 55% 33% 33% 33% 31% 50–59.9 52% 55% 48% 55% 30% 29% 31% 29% 60–69.9 59% 54% 55% 59% 32% 25% 34% 25% 70–79.9 69% 57% 68% 62% 55% 35% 55% 35% 80–89.9 90% 73% 88% 76% 75% 59% 75% 58% 90–100 96% 78% 96% 80% 85% 65% 85% 64% Table 5—User’s and producer’s accuracies for a present/absent categorization (categorization C) for edited and non-edited RO classifications derived from 1:4,000 and 1:12,000-scale imagery. 1:4,000 Edited 1:4,000 Unedited 1:12,000 Edited 1:12,000 Unedited Percent-RO Intervals User’s Producer’s User’s Producer’s User’s Producer’s User’s Producer’s Present 91% 85% 82% 86% 90% 74% 83% 77% Absent 92% 95% 92% 90% 87% 96% 88% 91% and producer’s accuracies ranged between 74 and 96 percent, depending on the scale of the imagery and whether the map was edited (table 5). For the edited map derived from the 1:4,000scale imagery, Feature Analyst correctly identified Russian olive in 85 percent of transect cells where it occurred, while 91 percent of cells where Feature Analyst mapped Russian olive contained Russian olive. Overall, Feature Analyst located Russian olive throughout the imagery with a relatively high degree of accuracy. However, some trees (especially smaller trees) were occasionally not identified by Feature Analyst. Also, the polygons created by Feature Analyst often underestimated the actual area occupied by the particular tree or group of trees. In other words, errors of omission were usually greater than errors of commission. This is illustrated by the fact that within transects, the total area of Russian olive observed in the field was 15 or 25 percent higher than the edited area mapped by Feature analyst from the 1:4,000 and 1:12,000-scale photography respectively. Costs The expenses involved with mapping an invasive plant using remote sensing can vary widely depending on the specific objectives, imagery requirements, vendor availability, location, availability of an in-house analyst, the analyst’s level of experience, and a variety of other factors. In addition, the per-acre cost of aerial photography is scale-dependent and decreases with increasing acreage. Our pilot study area was very small, yielding a high cost per acre. Because of the many variables that can affect the cost, the economics and feasibility of any proposed weed mapping project should be carefully evaluated before selecting a specific mapping method. In some cases, remote sensing may prove to be the best and most economical approach, while in 6 | RSAC-0087-RPT1 other cases it may not. For reference, the two scales of scanned photography for this project were acquired at a cost of approximately $5,100. Acquiring a single scale of photography over a larger area would decrease the relative cost (e.g., cost per acre) of acquisition. It is estimated that three full-time person weeks would be required to processes the scanned imagery, with an additional 1–2 person weeks to complete an accuracy assessment. At a cost of $300 per day, processing would cost $4,500, with an additional $3,000 for an accuracy assessment. Using these estimates, the total cost, including imagery, processing, and accuracy assessment is estimated at $12,600. The Fishlake National Forest estimated that doing a ground survey to map this same region of Salina creek would cost between $12,000 and $14,000. Compared to field surveys, one benefit of mapping Russian olive from aerial photography is that the image processing and analysis can be done during winter months. This frees field crews for other projects during summer months and allows the bulk of the work to be done during the winter when personnel are less busy. Conclusions Russian olive within riparian areas of semiarid regions of the Fishlake National Forest proved to be a good target for mapping using large-scale, scanned, natural color aerial photography. In particular, the silver/ gray foliage of Russian olive coupled with its large size and clumped distribution distinguished the tree from its surroundings. Also, its preference for moist riparian areas allowed us to simplify the image processing by excluding non-riparian areas from further analysis. Feature Analyst proved to be an effective tool for mapping Russian olive. Overall, the software was able to locate Russian olive with a high degree of accuracy; however, smaller trees were sometimes missed and the size of trees and groups of trees was frequently underestimated. Training the classifier on a subset of the imagery and applying the model to the rest of the imagery in a batch processing mode did not produce reliable results. Therefore, the classifier had to be retrained for each section of imagery, which is a time-consuming process. References Babbitt, B. 1998. Statement by Secretary of the Interior on invasive alien species. Proceedings, National Weed Symposium, BLM Weed Page. April 8-10. Casady, G.M.; Hanley, R.S.; Seelan, S.K. 2005. Detection of leafy spurge (Euphorbia esula) using multidate high-resolution satellite imagery. Weed Technology 19:462-467. For additional information, contact: Henry Lachowski Remote Sensing Applications Center 2222 West 2300 South Salt Lake City, UT 84119 phone: 801-975-3750 e-mail: hlachowski@fs.fed.us. This publication can be downloaded from the RSAC Web sites: http://fsweb.rsac.fs.fed.us and http://www.fs.fed.us/eng/rsac Dewey, S.A.; Jenkins, M.J.; Tonioli, R.C. 1995. Wildfire suppression - a paradigm for noxious weed management. Weed Technology 9:621-627. Hunt, E.R. Jr.; Everitt, J.H.; Ritchie, J.C.; Moran, M. S.; Booth, D.T.; Anderson, G.L.; Clark, P.E.; Seyfried, M.S. 2003. Applications and research using remote sensing for rangeland management. Photogrammetric Engineering and Remote Sensing 69:675-693. Katz, G.L.; Shafroth, P.B. 2003. Biology, ecology and management of Elaeagnus angustifolia L. (Russian olive) in western North America. Wetlands 23:763-777. Lass, L.W.; Prather, T.S.; Glenn, N.F.; Weber, K.T.; Mundt, J.T.; Pettingill, J. 2005. A review of remote sensing of invasive weeds and example of the early detection of spotted knapweed (Centaurea maculosa) and babysbreath (Gypsophila paniculata) with a hyperspectral sensor. Weed Science 53:242-251. Lillesand, T.M.; Kiefer, R.W. 1994. Remote Sensing and Image Interpretation, 3rd ed. John Wiley and Sons, Inc. New York, NY. 750 pp. Maheu-Girouxa, M.; de Blois, S. 2005. Mapping the invasive species Phragmites australis in linear wetland corridors. Aquatic Biology 83:310-320. Stannard, M.; Ogle, D.; Holzworth, L.; Scianna J.; Sunleaf, E. 2002. History, biology, ecology, suppression and revegetation of Russian-olive sites (Elaeagnus angustifolia L.). Plant Materials Technical Note No. 47. Boise, ID. U.S. Department of Agriculture, Natural Resources Conservation Service, 14 p. U.S. Department of Agriculture, Forest Service. 2004. National Strategy and Implementation Plan for Invasive Species Management. Rep. FS-805. Washington, DC: U.S. Department of Agriculture, Forest Service. 17 p. 7 | RSAC-0087-RPT1 The Forest Service, United States Department of Agriculture (USDA), has developed this information for the guidance of its employees, its contractors, and its cooperating Federal and State agencies and is not responsible for the interpretation or use of this information by anyone except its own employees. The use of trade, firm, or corporation names in this document is for the information and convenience of the reader. Such use does not constitute an official evaluation, conclusion, recommendation, endorsement, or approval by the Department of any product or service to the exclusion of others that may be suitable. The U.S. Department of Agriculture (USDA) prohibits discrimination in all its programs and activities on the basis of race, color, national origin, age, disability, and where applicable, sex, marital status, familial status, parental status, religion, sexual orientation, genetic information, political beliefs, reprisal, or because all or part of an individual’s income is derived from any public assistance program. (Not all prohibited bases apply to all programs). Persons with disabilities who require alternative means for communication of program information (Braille, large print, audiotape, etc.) should contact USDA’s TARGET Center at (202) 720–2600 (voice and TDD). To file a complaint of discrimination, write to USDA, Director, Office of Civil Rights, 1400 Independence Avenue, S.W., Washington, D.C. 20250– 9410, or call (800) 795–3272 (voice) or (202) 720–6382 (TDD). USDA is an equal opportunity provider and employer. 8 | RSAC-0087-RPT1