When a body is loaded and deforms, elements of that... distorted. The quantity that we use to measure the changes... Strains in Three Dimensions

EM 424: 3-D Strains
Strains in Three Dimensions
Definitions of normal and shear strains
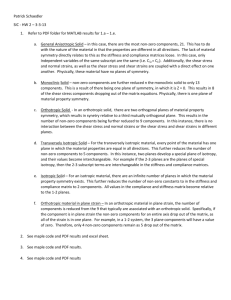
When a body is loaded and deforms, elements of that body elongate or contract and are distorted. The quantity that we use to measure the changes of length occurring in the body is called the normal strain. Consider for example, a small directed line segment d r n between two very close points P and Q in the undeformed body. We will define the length of this small segment as ds n
and its direction by the unit vector is loaded and deforms, point P will move to a new point P * and Q n . When this body
to a new point Q * and n = d r /ds n ds n
P d r n
Q dS
P* d R n n
Q* undeformed body deformed body the original line segment will change to a new segment d R n
of length dS n
(see Figure)
Normal Strain
We will measure the change of length occurring for this small line segment in terms of the normal strain, E nn
, at point P which is defined as
EM 424: 3-D Strains
E nn
=
=
= dS n
2 −
2 ds n
2 ds 2 n d R n
⋅ d R n
2 ds
− d r n
2 n
1
2
d R
ds n n
2
− 1
⋅ d r n
This definition can be used regardless of the size of the strain, so that it is a measure of the deformation that is useful in general. However, if the changes of lengths occurring in the body are very small, as often occurs in practice, this normal strain reduces to the normal small strain, e nn
, defined as the relative elongation of the line segment, i.e.
E
≅ nn e nn
=
=
( dS n
− ds n
2 dS n
− ds n ds n
) ( ds dS
2 n n
+ ds n
)
Shear Strain
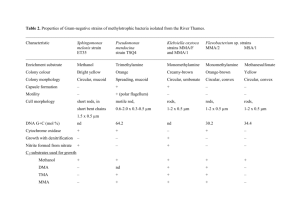
In addition to changes of length occurring in the body, there are distortions (changes of angle) which also must be characterized. The shear strain will be the quantity we use to define these changes. To obtain the shear strain we consider two line segments in the undeformed body along the n and t directions which initially are at right angles to each other (see Figure). In the deformed body, these line segments will no longer be othogonal. We will let θ nt
be the new angle between the two distorted line segments. t = d r /ds t n = d r /ds n ds
R d r t t
P ds n d r n
Q
R
* d R t
θ
P* d R nt n dS t dS
Q* n undeformed body deformed body
EM 424: 3-D Strains
The shear strain, E nt
, will then be defined as
E nt
=
1
2 d R ds n n ⋅ d R ds t t
This shear strain is related to the angular distortions occurring in the body since the cosine of the angle between two unit vectors is just the dot product of those two vectors.
Thus d R n ⋅ d R t
cos θ nt
= sin
π
2
− θ nt ds n d R n d ds t
R t ds n ds t
Using the definitions of the normal and shear strains for the n and t directions, then
sin
π
2
− θ nt
2 E nt
1 + 2 E nn
1 + 2 E tt which shows that if shear stress E nt
θ nt
=
π
2
so that there is no angular distortion of these two lines, the
indeed is zero. When the strains are small we have sin
π
2
− θ nt
π
2
− θ nt
E nn
<< 1, E tt
<< 1 so that
E nt
≅ e nt
=
γ
2 nt =
1
2
π
2
− θ nt
i.e. the small strain approximation for E nt engineering shear strain, γ nt
is e nt
which just one half the ordinary
, defined as the change of the angle (from ninety degrees) of two originally orthogonal line segments. As we will see when we talk about strain transformations, it is more convenient to use the shear strain e nt engineering shear strain γ nt
.
rather than the
EM 424: 3-D Strains
Strain-Displacement Relations
Although the normal strains and shear strains completely define the deformation locally everywhere in the body, knowing these strains it is not easy to directly determine what the shape of the deformed body actually is. A more convenient way to define the deformation is to describe the displacement vector, u ( x, y, z ) for every point P = (x, y, z) in the undeformed body undeformed body deformed body x
2
(x, y, z) u (x, y, z) P * r
P e
2
R (x, y, z) e
3 e
1 x
1 x
3
Obviously the strains are related to the displacements, so we need to determine these strain-displacement relations. From the geometry we see that
R
( x
1
, x
2
, x
3
) = r + u
( x
1
, x
2
, x
3
)
=
3
∑ i = 1 x i e i
+ u
( x
1
, x
2
, x
3
) so that if r changes by a small amount d r n d R n
= d r n
in the
+ d u n direction, we have or, dividing by the length of d r n
, ds n
EM 424: 3-D Strains d R ds n n = d r ds n n + d ds u n
= n + d u ds n
Thus, using this result in the definition of the normal strain we have
E nn
= n ⋅ d u ds n
+
1
2 d u ds n
⋅ d u ds n
Similarly, if we let r change by a small amount d r t d R ds t t = d r ds t t +
= t + d u ds t so that we can also write the shear strain as d u ds t
E nt
=
1
2
t ⋅ d ds u n
+ n ⋅ d ds u t
+ d ds u n
in the t direction we have
⋅ d u ds t
If the strains are small enough so that we can neglect the products of the displacement gradients in these definitions, which is often the case, then we see that for small normal and shear strains we have e nn
= n ⋅ d u ds n e nt
=
1
2
n ⋅ d ds u t
+ t ⋅ d ds u n
Since these results are valid for any directions n and t , we can compute the strains (both finite and small) for line segments along the Cartesian (x, y, z) axes by simply making particular choices for n and t . Consider, for example, letting n lie along the x -axis and t along the y axis. Then n = e
1
, t = e
2
and we have
EM 424: 3-D Strains
E xx e xx
=
= E
11 e
11
=
= e
1 e
1
⋅
⋅
∂ u
∂ x
1
∂ u
∂ x
1
E xy
= E
12
=
1
2
e
2
+
⋅
∂ u
∂ x
2
1
2
∂
∂ x u
1
⋅
+ e
1
⋅
∂ u
∂ x
1
∂ u
∂ x
1
+
∂ u
∂ x
1
⋅
∂
∂ u x
2
e xy
= e
12
=
1
2
e
2
⋅ ∂ u
∂ x
2
+ e
1
⋅ ∂ u
∂ x
1
In exactly the same fashion we can obtain the other normal stresses and shear stresses.
Note that we can write both the normal strains and shear strains in exactly the same form since we have
E e ij ij
=
=
1
2
1
2
e i
e i
⋅
∂ x
∂ u
∂ x j u j
+ e
+ e j j
⋅
⋅ ∂
∂ x u x
∂ u i i
+ ∂ x
( i u
, i j
⋅ ∂ x
= u j
1,2,3
)
( i , j = 1,2,3
)
These results are still in vector notation. However, if we write the displacement vector u in terms of its scalar components along the (x, y, z) axes, i.e. we let u =
3
∑ i = 1 u i e
∂
∂ x u j
=
3
∑ i = 1 i
∂ u i
∂ x j e i then the strains can be written directly in terms of these components as
E e ij ij
=
=
1
2
1
2
∂ u i
∂ x j
∂ u i
∂ x j
+
+
∂
∂
∂ u x u
∂ x i i j j
3
+ ∂ k = 1 u x k i
∂ u k
∂ x j
In a similar fashion we can write the strains E nn of the displacement components. Consider first
and E nt
E nn
in purely scalar forms in terms
. Since
EM 424: 3-D Strains n =
3
∑ i = 1 n i e i
= d ds u n
=
3
∑ i = 1 du i ds n d r n ds n e i
=
3
∑ i = 1 dx i ds n e
=
3
∑ i = 1
3
∑ j = 1
∂ u i dx j i dx ds n j
e
i
=
3
∑ i = 1
3
∑ j = 1
∂ u i
∂ x j n j e i
we find
E nn
=
3
∑ i = 1
3
∑ j = 1
∂ u i
∂ x j
+
1
2
3
∑ k = 1
∂ u k
∂ x i
∂ u k
∂ x j
n i n j
Note that we can write
∂ u i
∂ x j
=
1
2
∂ u i
∂ x j
+
∂ u j
∂ x i
1
2
∂ u i
∂ x j
−
∂ u j
∂ x i
= e ij
+ ω ij where e ij
are the small strain components we defined earlier and the location average rotation in the body. But the matrix of ω
ω ij
can be shown to be ij
terms is antisymmetric, i.e. ω ij
= − ω ji
so that
3
∑ i = 1
3
∑ j = 1
ω ij n i n j
= 0
This means that we can rewrite the expression for E nn
E nn
=
3
∑ i = 1
3
∑ j = 1
1
2
∂ u i
∂ x j
+
∂ u
∂ x i j
3
+ ∂ k = 1 u x i k
∂ u k
∂ x j
n i
in the form n j
=
3
∑ i = 1
3
∑ j = 1
E ij n i n j or, equivalently
E nn
= { } T [ ] { }
In an entirely similar fashion we find the shear strain E nt
E nt
=
3
∑ i = 1
3
∑ j = 1
1
2
∂ u i
∂ x j
+
∂ u j
∂ x i
+
3
∑ k = 1
∂ u
∂ x i k
∂ u k
∂ x j
n i t j
becomes
=
3
∑ i = 1
3
∑ j = 1
E ij n i t j
EM 424: 3-D Strains or
E nt
= { } T [ ] {}
When the strains are small, we can simply neglect the product of displacement derivatives and find, analogously e nn
=
3
∑ i = 1
3
∑ j = 1
1
2
∂ u
∂ x i j
+
∂ u j
∂ x i
n i n j
=
3
∑ i = 1
3
∑ j = 1 e ij n i n j e nt
=
3
∑ i = 1
3
∑ j = 1
1
2
∂ u i
∂ x j
+
∂ u j
∂ x i
n i t j
=
3
∑ i = 1
3
∑ j = 1 e ij n i t j
or, in matrix notation again e nn
= { }
= { } T
T e
[ ] n
{ } e nt
If we compare these results to our previous results for stresses, we see that they are identical in form if we simply make the replacements σ nn
, σ nt
→ E nn
, E nt
, σ ij
→ E ij
(or
σ nn
, σ nt
→ e nn
, e nt
, σ ij
→ e ij
). Thus all our previous equations involving stress transformations, principal stresses, Mohr’s circles, etc. remain valid in terms of strains as well. For example, using these replacements we can write the strain transformation equations relating the small strains e ij
( along a set of
( x
1
, x
2
, x
3 e ij
′ (along a set of
( x
1
′ , x
2
′ , x
3
′
)
axes) to the small strains
)
axes) through the direction cosines as e ′ =
3
∑ i = 1
3
∑ j = 1 l im l jn e ij or
[ ] = l
T [ ] [ ]
EM 424: 3-D Strains
Dilatation
Since the normal strains are measures of changes of length, they are also related to the change of volume occurring in the body. We have from the definitions of the strains
∆ ′ ≅ ∆ x + e xx
∆ x
∆ ′ ≅ ∆ y + e yy
∆ y
∆ ′ ≅ ∆ z + e zz
∆ z so that to first order (neglecting products of small strains)
∆ ′ ∆ ′ ∆ ′ = ∆ x ∆ y ∆ z +
( e xx
+ e yy
+ e zz
)
∆ x ∆ y ∆ z
For a small element volume V = ∆ x ∆ y ∆ z , the relative change of volume of that element is defined as the dilatation, ∆ , given by
V
V
= e xx
+ e yy
=
∂ u x
∂ x
+
∂ u y
∂
+ y e zz
+
∂
∂ u z z
Summary – small strains
Since all the problems we will solve will make the small strain assumption, below we have summarized the results obtained previously for small strains in explicit component forms. e xx
=
∂ u x
∂ x
, e yy
=
∂ u y
∂ y
, e zz
=
∂ u z
∂ z e xy
=
γ
2 xy e xz
= e yz
=
γ
2 xz
γ yz
2
=
1
2
∂ u x
∂ y
+
∂ u y
∂ x
=
1
2
∂ u x
∂ z
=
1
2
∂ u y
∂ z
+
∂ u z
∂ x
+ ∂ u
∂ y z
EM 424: 3-D Strains
e ′ e ′ e ′ e ′ e ′ e ′ e ′ e ′ e ′
=
l
xx l xy l xz e nn e nt
= e xx n 2 x
+ e yy n 2 y
+ 2 e xy n x n y
+ 2 e
+ xz e zz n n x n z z
2
+ 2 e yz n y n z
= e xx n x t x
+ e xy
( n x t y
+ e xz
( n x t z
+ e yz
( n y t z
+ e yy n y t y
+ n y t x
+ n z t x
+ n z t y
)
)
)
+ e zz n z t z l yx l yy l yz l l zx l zy zz
e xx e e yx zx e xy e yy e zy e xz e yz e zz
l xx
l yx l zx l xy l yy l zy l xz l yz
l zz