-an experimental and computational investigation
advertisement

In-vivo Cartilage Contact Biomechanics
-an experimental and computational investigation
of human ankle joint complex
by
Lu Wan
B.S. University of Science and Technology of China, 2002
Submitted to the Department of Physics in Partial Fulfillment of the
Requirements for the Degree of Doctor of Philosophy in Physics
at the
Massachusetts Institute of Technology
June 2008
o 2008 Lu Wan. All rights reserved
The author hereby grants to MIT permission to reproduce and to distribute publicly paper
and electronic copies of this thesis document in whole or in part in any medium now
known or hereaftreated.
Signature of Author: ..........
.... ..
.............
Department of Physics
February 25, 2008
(N
Certified by: ...
..................
feUUoa
LI
Associate Profestr of Orthopaedic Surgery/Bioengineering
Harvard Medical School
/0) /Jhesis Supervisor
Certified by: .....
........................
6k'exander van Oudenaarden
Associate Professor of Physics
Thesis Co-Supervisor
4
Accepted by: ................................
T omas J. reytak
*
Professor 6rPhysics
Associate Department Head for Education
MASSACHUSETTS INSTITUTE
OF TECHNOLOGY
OCT 0 9 2008
LIBRARIES
ARCHIVES
In-vivo Cartilage Contact Biomechanics
-an experimental and computational investigation
of human ankle joint complex
by
Lu Wan
Submitted to the Department of Physics
on February 25, 2008, in Partial Fulfillment of the Requirements
for the Degree of Doctor of Philosophy in Physics
ABSTRACT
Osteoarthritis is affecting over 20 million people in the United States, the etiology
of which is still unclear. As abnormal stress is believed to be one of the factors
causing the degeneration of cartilage, the combined dual-orthogonal fluoroscopic
and magnetic resonance imaging technique was applied to investigate the in-vivo
biomechanics of human ankle joint complex in this work. The in-vivo kinematic
data showed that the talocrural joint contributes more in dorsi/plantarflexion,
while the subtalar joint is more responsible for inversion/eversion and
internal/external rotation of the joint. During the stance phase of walking there is
a complicated combination of the motion of the talocrural and subtalar joints.
Cartilage-to-cartilage contact area during the stance phase of walking was
determined by quantifying the amount of overlap of the cartilage surfaces of the
tibia and talus. The in-vivo cartilage contact data showed significant changes in
cartilage contact areas at different positions during the stance phase of walking.
The articular cartilage contact was only observed in less than 50% of the
cartilage coverage areas in the talocrural joint at various positions of the
simulated stance phase of walking. The 3D compressive contact strain
distribution within the ankle joint was determined under full body weight based on
the thickness distribution and the deformation of the cartilage layers. The mean
of the average cartilage contact strain of the entire contact area was only 7.5%
whereas the mean peak contact strain reached 34.5%. With Young's modulus as
7.5 MPa and Poisson's ratio as 0.4, the average peak pressure was 6.87 ± 1.76
MPa and the average joint contact force was 1.66 ± 0.12 body weight.
The in-vivo creep test of human ankle joint was also carried out and the contact
deformation occurred mostly in early 30 to 40 seconds after loading the ankle
joints. The in-vivo material properties was calculated and compared with the invitro data. More computational research was performed focusing on the finite
element analysis of the in-vivo ankle cartilage with biphasic/poroelastic material
properties. The variation of the cartilage surface layer permeability was shown to
have significant effects on the biomechanics behavior of human ankle cartilage.
Thesis Supervisor: Guoan Li
Title: Associate Professor of Orthopaedic Surgery/Bioengineering
Thesis Co-Supervisor: Alexander van Oudenaarden
Title: Associate Professor of Physics
Acknowledgements
This thesis would not have been possible without the support of many
people.
I would like to give many thanks to my thesis advisor, Dr. Guoan Li for his
excellent guidance and great advices through the work. He has taught me
everything I know about musculoskeletal biomechanics. I am very thankful to him
for giving me the opportunity to work on this research and helping me when I
encounter difficulties. Without his valuable guidance and generous support, I
would not have reached this point.
I am truly grateful to Professor Alexander van Oudenaarden for his helpful
suggestions and valuable comments while chairing the thesis committee. I would
also like to thank my committee members, Professor Michael Feld, and Professor
Leonid Mirny for their precious time on reviewing my thesis work and helpful
suggestions.
I am grateful to the friendships and discussion from my colleagues at the
Bioengineering Laboratory: Dr. Louis E. Defrate, Dr. Jeremy F. Suggs, Jeffrey
Bingham, Ramprasad Pappanagari, Sam Van de Velde, Daniel Massimini, Ali
Hosseini, Michal Kozanek, Shaobai Wang, George Hanson, Angela Moynihan,
Katrik Varadarajan, Gang Li, Dr. Nha, Dr. Richard de Asia, and Dr. Harry E.
Rubash. I have benefited a lot from working with you all.
I would like to thank my aunt, Professor Fang Liu, who helped me start
this journey and guided me through it. I would also like to thank my parents,
Qingrong Wan and Pingshu Guo, for their love, support and encouragement.
Without them I would never have accomplished this work. This thesis is
dedicated to them.
Table of Contents
Acknowledgements ...............................................................
5..
Table of Contents ................................................................... 7
List of Figures ....................................................................
12
List of Tables ...................................................................
17
Chapter1: Introduction .................................................
...........21
1.1 Motivation and Objectives.............................
...... 21
1.2 Organization .....................................................
.......23
1.3 Human Ankle Joint Complex (AJC) ................................ 25
1.4 Articular Cartilage......................................................... 29
1.5 Abbreviations............................................................36
Chapter 2: In-Vivo Kinematics of the Human Ankle Joint Complex...37
2.1 Introduction........................... .......................
37
2.2 Methodology....................................................... ...... 40
2.2.1 3D Magnetic Resonance Imaging and Model of Human
Ankle Joint Complex................................... ....... 40
2.2.2 Dual Orthogonal Fluoroscopic System .........
..... 43
2.2.3 Matching Process of the AJC .............................
49
2.2.4 Kinematics of the AJC..........................................50
2.3 Results .................................................................
55
2.3.1 Kinematics of Non-weight Bearing Positions...........55
2.3.2 Kinematics of Stance Phase of Gait ...................... 58
2.4 Discussion..............................................
61
Chapter 3: In-vivo Cartilage Contact of the Human Ankle Joint.......71
3.1 Introduction........................... .................
71
3.2 Methodology...........................................
74
3.2.1 MR Imaging and 3D Model.................................74
3.2.2 Dual Orthogonal Fluoroscopic System................... 78
3.2.3 Determination of In-vivo cartilage Contact Area..........81
3.2.4 System Validation .............................................. 87
3.2.5 Data Analysis.................
................................ 91
3.3 Results .................................................................
3.3.1 System Validation..............................
92
...... 92
3.3.2 In-vivo Cartilage Contact Area at Talocrural Joint.......97
3.3.3 In-vivo Cartilage Contact Patterns at Talocrural Joint
.......................................
...... .. .. ............ 98
3.4 Discussion ............................................................. 101
Chapter 4: In-vivo Cartilage Stress-Strain Distribution of the Human
A nkle Joint ........................................................
106
4.1 Introduction ............................................................... 106
4.2 Methodology ............................................................. 09
4.2.1 MR Imaging and 3D Model................................ 109
4.2.2 Dual-orthogonal Fluoroscopic System and In-vivo Ankle
Position..........................................
116
4.2.3 Determination of In-vivo Cartilage Contact Strain
Distribution ..................................................... 118
4.3 Results ................................................................ 121
4.3.1 Cartilage Thickness Distribution..........................121
4.3.2 In-vivo Cartilage Strain Distribution ........................ 127
4.3.3 Accuracy of Cartilage Thickness Measurement ......... 128
4.3.4 Precision of Cartilage Thickness Measurement ......... 130
4.4 Discussion ............................................................... 137
43
Chapter 5: In-vivo Creep Test of Human Ankle Joint ................ 1...
5.1 Introduction .............................................................. 143
5.2 Methodology ............................................................ 146
5.2.1 MR Scan and 3D Ankle Model .............................. 146
5.2.2 Dual-orthogonal fluoroscopic Imaging .........
.. 150
5.2.3 Ankle Imaging under In-vivo Loading Conditions......153
5.2.4 In-vivo Ankle Joint Kinematics Using Image Matching
...................................................................... 154
5.2.5 In-vivo Cartilage Contact Deformation ................. 158
5.3 Results ................................................................ 161
5.3.1 Cartilage Deformation with Time ................ .........162
5.3.2 Deformation Rate .............................................. 169
5.4 Discussion ...................................................
......... 170
Chapter 6: Validation of the Cartilage Deformation Measurement
..................................................... . . . .
...... 176
6.1 Introduction .............................................................. 176
6.2 Methodology ................................................
.............178
6.3 Results .................................................................
182
6.4 Discussion .............................................................. 183
Chapter 7: Modeling of Human Ankle Cartilage ...................
7.1 Introduction .............................................................
1......84
184
7.1.1 General Information ........................................... 184
7.1.2 Rigid Body Spring Model (RBSM) .......................... 185
7.1.3 Finite Element Model with Linear Elastic Material
Properties ....................................................... 1..86
7.1.4 Biphasic/Poroelastic Model with Finite Element
Analysis ........................................................
10
187
7.2 The Effect of Permeability of Cartilage Superficial Zone on the
Behavior of Stress Relaxation and Creep of Human Ankle
Joint .............................................................. .....
19 1
7.2.1 Stress Relaxation .............................................. 197
7.2.2 Creep.............................................
207
7.2.3 Discussion......................................... 217
7.3 In-vivo Real Time Human Ankle Cartilage Material Properties
..............................................................................
22 1
Chapter 8: Conclusion.........................................229
8.1 Summary..............................................229
8.2 Future Steps.............................................234
Reference ...............................................
11
....................... 236
List of Figures
Fig. 1.1 The anatomic structure of human ankle joint complex (PTFL and deltoid
ligaments are not shown).........................................
27
Fig.1.2 Microstructure of articular cartilage............................................... 31
Fig. 2.1 (a) MR image of the AJC; (b) 3D anatomic model of the AJC.............41
Fig. 2.2 Schematic illustration of using dual-orthogonal fluoroscopic system to
image the AJC.................................
..................... .................. 45
Fig. 2.3 Reproduction of the in-vivo AJC position .......................... 47
Fig. 2.4 (a) Fitting circular arc to the trochlea tali; (b) anatomically based
coordinate system and rotation angles (fibula not shown)..............51
Fig. 2.5 Medial view of the AJC during the stance phase of walking with tibia
fixed (fibula not shown). Blue: Heel Strike; Red: Mid-Stance; Green:
Toe Off.........................................................69
Fig. 3.1 (a)A typical sagittal plane MR image of the talocrural joint;
(b) 3D bony and cartilage models of the talocrural joint ..................... 75
Fig. 3.2 (a) The dual-orthogonal fluoroscopic system setup for measurement of
in-vivo ankle joint kinematics. (b) three weightbearing positions of the
foot captured in this chapter....................
.................................. 79
Fig. 3.3 (a) The virtual dual fluoroscopic system used to reproduce the in-vivo
talocrural position; (b) medial view of the talocrural joint during the
stance phase of walking (cartilage not shown) reproduced using the
virtual dual fluoroscopic system .................... ........................... 83
Fig.3.4 (a) Nine sub-regions of the distal tibial cartilage surface; (b) nine subregions of the proximal talar cartilage surface. The 9 sub-regions are
identified by the letters on both the tibial and talar cartilage surfaces.
.................................................
............
..
.................... 8 5
Fig.3.5 (a) the contact pattern measured using silicone casting method in a
cadaveric foot specimen; (b) 3D talus model with blue contour
representing the contact pattern from silicone casting method and green
contours representing the contact patterns obtained from five image
matching processes.............................
...............
89
Fig.3.6 In-vivo cartilage contact patterns during the simulated stance phase of
walking of a typical talocrural joint .............................................. 93
Fig.3.7 Talocrural cartilage contact areas during the simulated stance phase of
walking. *p<0.05.............................................
95
Fig. 4.1 (a)A typical sagittal plane MR image of the talocrural joint; (b) 3D bony
and cartilage models of the talocrural joint .................................. 111
Fig. 4.2 Regional ankle cartilage thickness distribution. (a) definition of tibial
cartilage regions; (b) tibial cartilage thickness distribution in different
regions; (c) definition of talar cartilage regions; (d) talar cartilage
thickness distribution in different regions. *p<0.05 ...................... 113
Fig.4.3 (a) Experimental setup using the dual-orthogonal fluoroscopic system to
capture the in-vivo ankle joint position. (b) The virtual dual-orthogonal
fluoroscopic system created to reproduce the actual experimental setup.
The 3D ankle models can be manipulated in 6 DOF so that their
projections match the actual ankle images on the two virtual image
inte nsifiers ........................................................................... . 119
Fig. 4.4 (a) Tibial cartilage thickness distribution of one typical subject; (b) talar
cartilage thickness distribution of the same subject .................... 123
Fig. 4.5 (a) Strain distribution on the talar cartilage surface of one typical subject
and (b) strain distribution along cross-section line "b", (c) along crosssection line "c" and (d) along cross-section line "d". "0" on x-axis
corresponds to the location of the peak strain ............................ 125
Fig. 4.6 (a) Cadaveric talus specimen cut by a band saw; (b) MRI model of the
cadaveric talus with the cutting plane.................................131
Fig. 4.7 (a) Cross section of the cadaveric talus; (b) cross section of the MRI
model of the cadaveric talus. The cartilage thickness measured from
the above two cross sections were compared .............................133
Fig.4.8 (a) Ten times digitization of cartilage surface; (b) a close look of one
location of the cartilage surface (only five digitization are shown). Note
the definition of the normal line, intersections and average intersection
point ........................................................................ .......... 135
Fig. 5.1 (a)A typical sagittal plane MR image of the ankle joint; (b) the 3D ankle
joint model constructed using the 3D MR images of the ankle joint.
......................................................
.......... ............ 147
Fig. 5.2 Experimental setup using the dual-orthogonal fluoroscopic system to
capture the in-vivo ankle joint position.....................151
Fig. 5.3 The virtual dual-orthogonal fluoroscopic system created to reproduce the
actual experimental setup. The 3D ankle models can be manipulated in
6 DOF so that their projections match the actual ankle images on the two
virtual image intensifiers ...................................................... .... 155
Fig. 5.4 Cartilage contact was defined as overlapping of the counter cartilage
surfaces ........................................................................... ..159
Fig. 5.5 Compressive cartilage contact deformation distributions of Ankle 1 were
plotted on the tibial cartilage surface at different time intervals after
loading ............................................................................. .. 163
Fig. 5.6 (a)Average cartilage contact areas and (b) peak contact compressive
strain of the ankles change with time after loading.......................165
Fig. 5.7 The changing rates of (a)cartilage contact area and (b) peak contact
compressive strain of the ankles ............................................... 167
Fig. 6.1 Comparison of cartilage contact deformation measured using model
matching method and beads position method. (a) Experimental setup;
and (b) measured cartilage contact deformation data using the two
methods under different loading levels.......................................179
Fig. 7.1 Electron photomicrograph of collagens at (a) the articular surface; (b)
deep layer of the articular cartilage of the lateral femoral condyle of a 41
year old man ...............................
.......................
..........
193
Fig.7.2 (a)MR image of the ankle joint; (b)cartilage model of the ankle joint
created from (a)........................................................ ............ 195
Fig. 7.3 The displacement curve applied to the top of the tibia ..................
199
Fig. 7.4 Reaction force curves for different surface layer permeability during
stress relaxation............................ ................
201
Fig. 7.5 Peak reaction forces at to=1s for different surface layer permeability.
.......................................................
........... ............ 203
Fig. 7.6 The pore pressure distribution for different surface layer permeability at
to=ls during stress relaxation....................................205
Fig. 7.7 The vertical load curve applied to the top of the tibia.....................209
Fig. 7.8 Displacement curves for different surface layer permeability during creep.
........................................................... ............................... .2 11
Fig. 7.9 Tibia displacements at to=ls for different surface layer permeability.
............................................................... 213
Fig. 7.10 The pore pressure distribution for different surface layer permeability at
to=ls during creep................................. .............
215
Fig. 7.11 The pore pressure distribution for 3D finite element model during stress
relaxation..................................................219
Fig. 7.12 Compressive cartilage contact deformation distributions of one subject
plotted on the tibial cartilage surface at different time intervals after
loading....................................................223
Fig. 7.13 Young's modulus of in-vivo ankle cartilage as a function of loading time.
....................................................................
227
List of Tables
Table 1.1 Abbreviations used in this thesis........................................... .. 36
Table 2.1 Range of motion of the AJC, talocrural and subtalar joints from
maximum dorsiflexion to maximum plantarflexion. Italic numbers
show statistically significant difference between the motion of the
talocrural and subtalar joints. ..........................
.........56
Table 2.2 Range of motion of the AJC, talocrural and subtalar joints from
maximum supination to maximum pronation. Italic numbers show
statistically significant difference between the motion of the
talocrural and subtalar joints .................. ............................. 57
Table 2.3 Range of motion of the AJC, talocrural and subtalar joints during the
stance phase of walking. Italic numbers show statistically significant
difference between the motion of the talocrural and subtalar joints.
..........
. ........................................................5 8
Table 3.1 (a) the modified contact frequencies (%) at the sub-regions of tibial
cartilage surface corresponding to Figure 4(a) at different positions of
the simulated stance phase of walking; (b) the modified contact
frequencies (%) at the sub-regions of talar cartilage surface
corresponding to Figure 3.4(b) at different positions of the simulated
stance phase of walking ........................................................ 100
Table 4.1 (a) average cartilage coverage areas (mm2 ) of the 9 regions of the
tibial cartilage; (b) average cartilage coverage areas (mm2) of the 9
regions of the talar cartilage ................................................ 122
Table 4.2 Cartilage thickness (mm) measured at different locations on the talus
surface. The thickness was measured using the digital picture of the
actual specimen and the 3D MR image model. The differences
between the two methods were also calculated ................ ........129
Table 5.1 Data of contact area and contact strain as well as their change rates
as a function of time under target loading conditions..................161
Table 6.1 The displacements measure by the radiostereometric analysis (RSA)
with the beads and the combined MR and fluoroscopic imaging
technique ..... ................
................. 182
Table 7.1 Cartilage biphasic/poroelastic model parameters ......................... 190
Chapter 1: Introduction
1.1 Motivation and Objectives
Osteoarthritis is affecting over 20 million people in the United States,
which accounts for approximately 60-70% of known cases of joint diseases. The
disease is characterized by the pain in the affected joints after repetitive use,
swelling, warmth, and creaking of the affected joints as well as the limited
mobility of the joints. Abnormal contact stress has been widely assumed as the
initial cause of osteoarthritis. There has been no cure for osteoarthritis, as
cartilage has not been induced to regenerate. This disease leads to total joint
replacement in a half-million Americans each year (Krasnokutsky, Samuels et al.
2007).
As one of the joints in human lower extremities, ankle joint is surprising
more robust than other joints in the lower extremities, such as the hips and knees.
The rate of the primary ankle osteoarthritis is very low compared with those of
the primary hip and knee osteoarthritis (Treppo, Koepp et al. 2000). The
mechanism underneath this phenomenon is still unclear as we use all these
joints during our daily life. Compared with the knee joint, the ankle provides an
excellent model for the study of articular cartilage since the force transmitted
within the ankle joint is purely by cartilage-to-cartilage contact. Compared with
the human knee joint, there is no meniscus in the ankle joint. All these factors
motivate us to carry out this research to improve our understanding of the
biomechanics of human articular cartilage.
The objectives of this study are to measure the in vivo kinematics of
human ankle joint complex, the cartilage contact area and deformation, estimate
the stress distribution in the cartilage and the material properties of the articular
cartilage. All kinds of experimental and computational techniques have been
applied to achieve these objectives. We believe that all these information
provided by this study would be beneficial to the biomechanics research by
stepping one step further towards the understanding of the mechanism of
osteoarthritis. The ultimate goal of this study would be to compare the healthy
and osteoarthritic subjects for their in vivo cartilage deformation and mechanical
properties, design in vitro experiments to simulate the in vivo mechanical
environment in order to seek the cure of osteoarthritis.
1.2 Organization
This thesis has four main sections. As the first section, Chapter 2 studies
the in vivo kinematics of human ankle joints during the stance phase of walking.
Chapter 3 and 4 investigate the in vivo human ankle cartilage contact area,
stress and strain (the deformation of materials caused by stress) distribution
during the stance phase of walking. Chapter 5 and 6 look into the in vivo creep
test of the human ankle joint cartilage and validation study of the cartilage
deformation measurement. The last section, Chapter 8, focuses on the various
modeling techniques of human ankle cartilage. As the title of the this thesis
suggests, we could also divide it into two parts: the experimental part, which
includes Chapter 2, 3, 5, 6 and part of Chapter 4; the computational part, which
includes Chapter 7 and part of Chapter 4. Part of the thesis is based on the
following papers:
Wan L, de Asia RJ, Rubash HE, Li G In-vivo Cartilage Contact Deformation of
Human Ankle Joints under Full Body Weight. Journal of Orthopaedic Research.
In Press.
Li G, Wan L, Kozanek M Determination of Real Time In-vivo Cartilage Contact
Deformation in the Ankle Joint. Journal of Biomechanics. 2008; 41(1):128-36.
Wan L, de Asia RJ, Rubash HE, Li G Determination of in-vivo articular cartilage
contact areas joint under weightbearing conditions. Osteoarthritis and Cartilage.
2006; 14(12):1294-301
de Asia RJ, Wan L, Rubash HE, Li, G 6 DOF In-vivo Kinematics of the Ankle
Joint Complex: application of a combined dual-orthogonal fluoroscopic and MR
imaging technique. Journal of Orthopaedic Research. 2006; 24(5):1019-27.
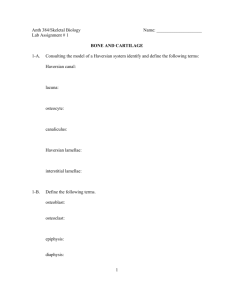
1.3 Human Ankle Joint Complex (AJC)
The human ankle joint complex is a complicated anatomical structure
combining various mechanically coupled joints. Its motion results from interplay
of several articulating joint surfaces and restraining ligaments (Fig. 1.1). It plays a
fundamental role in human locomotion (Gage, Deluca et al. 1995). In
combination with the knee and hip joints it enables locomotion in various forms
and transmits forces and moments during the foot-ground contact when the foot
can be regarded as the interface of the human locomotor system with the
environment. Malfunction or pain of the ankle joint complex leads to severe
impairment of gait and consequently to a reduction of individual mobility. The
clinical goal of surgeries to the ankles is to restore a fully functional locomotor
system and to provide a recovering patient with the most possible and ideally
unrestrained and painless mobility.
The human ankle-joint complex, comprising ankle (talocrural) and subtalar
(talocalcaneal) joints, is a complicated joint consisting of multi-bony segments.
The talocrural joint is defined as the articulation between the tibia and the talus
while the subtalar joint is referred to as the articulation between the talus and the
calcaneus. Gross motion between the foot and the shank, which is defined as the
motion between the calcaneus and the tibia, is the result of movements at these
two different joints. The passive structural integrity and stability of these joints are
primarily the result of the geometry of the joints and the support provided by the
ligaments surrounding them, such as the calcaneofibular ligament (CFL), anterior
talofibular ligament (ATFL), posterior talofibular ligament (PTFL) and the deltoid
ligament (Fig. 1.1). Ankle injuries are among the most common, particularly in
sports. They constitute between 10% and 15% of all injuries in sport with 85% of
these involving sprains of the lateral ligament complex (Renstrom, Wertz et al.
1988; Cawley and France 1991). Unsatisfactory results of total ankle
replacement arthroplasty (Lachiewicz 1994; Lewis 1994; Kitaoka and Patzer
1996; Kotnis, Pasapula et al. 2006) also highlight the need for more adequate
knowledge of the anatomical and biomechanical characteristics of the AJC. We
will discuss the in vivo kinematics of human AJC in Chapter 2.
Fig. 1.1 The anatomic structure of human ankle joint complex (PTFL
and deltoid ligaments are not shown).
27
1.4 Articular Cartilage
Articular cartilage is a highly specialized avascular, aneural, thin (1 to 5
mm) tissue precisely suited to withstand the rigorous joint environment without
failing during an average person's lifetime (Fig. 1.2). It covers the articulating
bone ends of diarthrodial joints. The primary functions of this tissue are to
distribute mechanical stresses by the contacting joint surfaces (Askew and Mow
1980) and to provide a low-friction surface for joint motion with minimum wear
(Mow, Ratcliffe et al. 1992). It responds to alterations in use, and allows pain-free
movement with a level of friction less than that of any prosthetic joint surface. We
will talk about the in vivo cartilage contact of human ankle joint in Chapter 3.
Articular cartilage is subjected to a wide range of static and dynamic mechanical
loads. More details about in vivo human ankle cartilage stress and strain
distribution under physiological loading condition will be discussed in Chapters 4
and 5.
Although cartilage varies in thickness, cell density, matrix composition,
and mechanical properties within the same joint, among joints, and among
species (Athanasiou, Rosenwasser et al. 1991), its cellular density is less than
that of any other tissue. The cells in articular cartilage, named chondrocytes, only
make up only about 1% of the volume of adult human articular cartilage
(Stockwell 1967; Stockwell 1978) while the extracellular matrix (ECM) makes the
rest of it (Stockwell 1979). Despite their sparse distribution and small changes in
size, location, appearance, and activity for decades, chondrocytes play an
essential role during the lifetime of cartilage, since they manufacture, secrete,
and maintain the organic component of the extracellular matrix. To accomplish
these activities, the cells must sense changes from the ECM caused by the
degradation of macromolecules and the mechanical loading on the articular
surface, and then respond by synthesizing appropriate types and amounts of
macromolecules.
The extracellular matrix consists of a dense network of type II collagen
fibrils enmeshed in a concentrated solution of negatively-charged proteoglycans
(polysaccharide chain structures). The interaction of the fluid and the
macromolecular framework give the tissue its mechanical properties of stiffness
and resilience (Linn and Sokoloff 1965; Lai, Mow et al. 1981; Maroudas and
Schneiderman 1987). The collagen accounts for 10-30% of articular cartilage by
net weight while the remaining 60-87% is water, inorganic salts, and small
amounts of other matrix proteins, glycoproteins, and lipids(Linn and Sokoloff
1965; Armstrong and Mow 1982). Because of the negatively charged
proteoglycans, the concentration of positive ions, such as sodium, increases
whereas the concentration of negative ions, such as chloride, decreases. The
increase in total inorganic ion concentration creates a Donnan osmotic pressure,
which is resisted by the collagen network. Collagen fibrils and proteoglycans are
considered to be the structural components of particular cartilage, which support
the internal mechanical stresses caused by the loads applied to the articular
cartilage (Mow, Holmes et al. 1984). Collagens contribute about 60% of the dry
weight of articular cartilage while proteoglycans contribute 25% to 35% and the
AiCuar srvfacW -
SiurOcial tqangtiai lonr
(10-20%)
Lmddl
de rnwkCakitdw cartilage -
can
(40-60%)
Demp zOne
Subchondral bone CancduIo
bone -
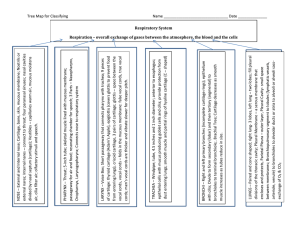
Fig.1.2 Microstructure of articular cartilage
noncollagenous proteins and glycoproteins contribute 15% to 20% (Buckwalter,
Rosenberg et al. 1990). The collagen meshwork gives cartilage its form and
tensile strength whereas proteoglycans are responsible for the compression
strength (Buckwalter and Mow 1992).
In order to form articular cartilage, chondrocytes organize the collagen
and proteoglycans into a unique, highly ordered structure (Buckwalter,
Rosenberg et al. 1990). The matrix composition, organization, and mechanical
properties as well as the cell morphology vary with the depth from the articular
surface (Fig. 1.2). The morphology changes in chondrocytes and matrix from the
articular surface to the subchondral bone makes the tissue stratified. The
microstructure of articular cartilage is highly organized into four distinct zones:
the superficial zone, middle zone, deep zone, and calcified cartilage zone as
shown schematically in Fig. 1.2 (Mow and Lai 1974; Eggli, Hunziker et al. 1988;
Hwang, Li et al. 1992). The relative size and appearance of theses zones vary
among species and among joints within the same species. The matrix differ in
water, collagen and proteoglycan (Buckwalter, Rosenberg et al. 1990).
Chondrocytes in different zones differ not only in shape, size and orientation
relative to the articular surface but also in metabolic activities (Aydelotte,
Schumacher et al. 1992).
In the superficial tangential zone, which represents 10 to 20% of the total
thickness, are sheets of fine, densely packed fibers randomly woven in planes
parallel to the articular surface (Weiss, Rosenberg et al. 1968; Redler and Zimny
1970) (Fig. 1.2). Chondrocytes in this zone synthesize a matrix that has a high
collagen concentration and a low proteoglycan concentration relative to the other
cartilage zones. It is also shown that they degrade proteoglycans more rapidly
and synthesize less collagen and proteoglycans than those from deeper zones
(Aydelotte, Schumacher et al. 1992). The dense mat of collagen fibrils lying
parallel to the articular surface gives this zone greater tensile stiffness and
strength than the deeper zones and resists shear forces generated during joint
function (Roth and Mow 1980). Removal of this zone increases tissue
permeability as we will discuss in more details in Chapter 7. Since the disruption
and remodeling of the superficial zone is one of the first detectable structural
changes in experimentally induced articular cartilage, it is believed that
alternations in this zone may contribute to the development of osteoarthritis by
changing the mechanical behavior of the tissue (Guilak, Ratcliffe et al. 1994).
In the middle zone (40 to 60% of the total thickness) the randomly
oriented and homogeneously dispersed collagen fibers are farther apart. This
zone contains the largest diameter collagen fibrils, the highest concentration of
proteoglycans, and the lowest concentration of water. The chondrocytes in this
zone are spheroidal in shape, and tend to align in columns perpendicular to the
articular surface (Fig. 1.2). Below this in the deep zone (about 30% of the total
thickness), the fibers come together, forming larger, radially oriented fiber
bundles; these bundles then cross the tidemark (Bullough and Jagannath 1983),
which is a thin basophilic line seen on light microscopic sections of decalcified
articular cartilage that roughly corresponds to the boundary between articular
cartilage and the calcified cartilage. These collagen fibrils form an interlocking
system that anchors the cartilage to the underlying bone. The thin calcified
cartilage zone separates the uncalcified cartilage and the subchondral bone. The
cells in the calcified cartilage zone have a smaller volume than the cells in other
zones. Overall, the inhomogeneity of fiber orientation is accompanied by zonal
variations in the collagen content, which is highest at the surface and the remains
relatively constant throughout the deeper zones (Lipshitz, Etheredge et al. 1975).
It is believed that stratified structure serves an important function by distributing
the stress more uniformly across the joint (Greco, Specchia et al. 1992). In
Chapter 7, we discuss more about this layering inhomogeneity and how it affects
the biomechanical behavior of joints.
1.5 Abbreviations
Several abbreviations are used in this thesis. Usually they are presented
in full name at the first time they appear. A table of all the abbreviations is listed
below for the reader's convenience.
Table 1.1 Abbreviations used in this thesis
Abbreviation
Full Name
AJC
Ankle Joint Complex
ATFL
Anterior Talofibular Ligament
CFL
Calcaneofibular Ligament
CV
Coefficient of Variance
DOF
Degree-Of-Freedom
MR
Magnetic Resonance
MRI
Magnetic Resonance Imaging
PTFL
Posterior Talofibular Ligament
RSA
Radiostereometric Analysis
SD
Standard Deviation
3D
Three-dimensional
Chapter 2: In-vivo Kinematics of
the Human Ankle Joint Complex
2.1 Introduction
Understanding of the mechanical characteristics of the ankle joint complex
(AJC, including talocrural and subtalar joints) is fundamental to facilitate both
diagnosis and restoration of various foot pathologies. The AJC kinematics has
been investigated extensively in-vitro using cadaveric ankle experiments
(Engsberg 1987; Siegler, Chen et al. 1988; Kitaoka, Lundberg et al. 1995;
Kitaoka, Luo et al. 1997; Parenteau, Viano et al. 1998; Leardini, O'Connor et al.
1999; Leardini, Stagni et al. 2001). However, the in-vitro situation bears little
resemblance to the in-vivo ankle due to its complicated anatomy and functional
loading conditions. In-vivo ankle joint kinematics has been studied using
superficial markers and video cameras during gait analysis (Kepple, Stanhope et
al. 1990; Moseley, Smith et al. 1996). Because of the difficulty of finding the
external landmark on the talus, the gait analysis method is limited to distinguish
the motion between talocrural and subtalar joints. To overcome this limitation,
tantalum intraossesous markers have been used to measure the kinematics of
AJC with roentgen sterophotogrammetry(Lundberg 1989; Lundberg, Goldie et al.
1989; Lundberg, Svensson et al. 1989; Lundberg, Svensson et al. 1989). Other
bone-anchored markers, such as intracortical pins(Westblad, Hashimoto et al.
2002; Arndt, Westblad et al. 2004) were also used to measure the in-vivo AJC
kinematics.
Recently, new imaging techniques, such as computed tomography (CT) and
magnetic resonance (MR) imaging, have been introduced into the in vivo
musculoskeletal joint biomechanics studies(Hirsch, Udupa et al. 1989; Hirsch,
Udupa et al. 1996; Hirsch, Udupa et al. 2000; Siegler, Udupa et al. 2005;
Mattingly In Press). These techniques have offered 3D quantification of the invivo morphology and positions of the AJC without using invasive markers. Using
these techniques, the joint has to be fixed in one position during CT or MR
scanning, limiting the flexibility of the techniques to study various functional
activities of the ankle. Li et al. (DeFrate, Sun et al. 2004) combined the 3D MR
and fluoroscopic imaging techniques to investigate the in-vivo joint kinematics
during knee flexion. It highlighted the possibility to detect the AJC kinematics
during foot motion.
In this chapter, we applied the combined 3D MR and fluoroscopic imaging
technique to measure 6 DOF AJC kinematics during various in-vivo activities of
the foot. The 3D AJC model was created from a 3D MR scan of the foot. The invivo AJC motion was captured using two orthogonally positioned fluoroscopes.
The 3D AJC model was then adjusted in 6 DOF in space to replicate the in-vivo
AJC positions captured on the dual fluoroscopic images (DeFrate, Sun et al.
2004). This chapter investigated the 6 degree-of-freedom (DOF) kinematics of
the AJC during maximum plantarflexion and dorsiflexion, maximum inversion and
eversion, and the stance phase of walking. Quantitative data were provided for
both the rotation and translation of the tibia, talus and calcaneus.
2.2 Methodology
2.2.1 3D Magnetic Resonance Imaging and Model of
Human Ankle Joint Complex
Five healthy ankles (3 left and 2 right) were investigated with the Internal
Review Board (IRB) approval of Massachusetts General Hospital (MGH). Four
ankles were from male and one was from female subjects (ages from 32 to 43
years old). Each ankle was MR imaged on a 1.5-T magnet (GE, Milwaukee, WI)
using a surface coil and three-dimensional spoiled gradient-recalled (3D SPGR)
sequence with the subject lying supine. A cubic viewing volume (16x16x10 cm3)
of the AJC was created from the MR scan with the distances of anterior-posterior
and proximal-distal as 16 cm and the distance of medial-lateral as 10 cm. Parallel
images are separated as 1-mm intervals and with a resolution of 512x512 pixels
(Fig. 2.1a). The imaging signals were generated from the water in the body.
Since the cartilage has more water content compared with the bones, it looks
brighter than the bones on the image ((Fig. 2.1a). The MR images were input into
a solid modeling software package (Rhinoceros@, Seattle, WA) and digitized to
outline the tibia, fibular, talus and calcaneus. Afterwards these outlines were used
to reconstruct the 3D geometric bony models of the tibia, fibular, talus and
calcaneus. The AJC of a typical subject reconstructed from MR images is shown
in Fig. 2.1b.
(a)
Tibii
bula
(b)
aneus
Talu!
Fig. 2.1 (a) MR image of the AJC; (b) 3D anatomic model of
the AJC.
2.2.2 Dual Orthogonal Fluoroscopic System
Two fluoroscopes (OEC@ 9800 ESP, GE, Salt Lake City) were positioned
in an orthogonal way to capture two orthogonal images of the AJC at different
foot positions (Fig. 2.2). During the experiment, the subject stood upright on a
platform, while the C-arms of the two fluoroscopes were both positioned at the
horizontal plane with the two intensifiers orthogonal to each other. Once the
ankle is at the target position, two orthogonal images were recorded
simultaneously by the two fluoroscopes from anteromedial and anterolateral
views of the ankle (Fig. 2.2).
For each subject, four non-weight-bearing positions of the AJC were
recorded using the fluoroscopes to study the full range of active motion of the
AJC including: maximum plantarflexion (rotation around the medial-lateral axis
with the foot turning downward), maximum dorsiflexion (rotation around the
medial-lateral axis with the foot turning upward), maximum supination (foot
position that combines inversion, plantarflexion, and internal rotation), and
maximum pronation (foot position that combines eversion, dorsiflexion, and
external rotation). During these non-weight-bearing tests, the subject lifted the
testing foot and actively performed the target motion. There was no apparatus to
restrict the motion of the foot.
To investigate the weight-bearing activities of the AJC, three positions in a
simulated stance phases of gait were recorded: heel strike (only the heel of the
target foot touches the ground in partial weight bearing), mid-stance (the
subjects' foot bears f'll body weight), and toe off (only the toes of the subjects'
foot touch the ground in partial weight bearing). During the weight-bearing tests,
the subject walked into the fluoroscopic system, but paused at the three positions
for the fluoroscopes to capture the images of the testing foot. There was no strict
positioning control across subjects.
1
2
Fig. 2.2 Schematic illustration of using dual-orthogonal
fluoroscopic system to image the AJC.
Fig. 2.3 Reproduction of the in-vivo AJC position.
47
2.2.3 Matching Process of the AJC
The 3D AJC model and the orthogonal fluoroscopic images were input into
the solid modeling software to create a virtual dual-orthogonal fluoroscopic
system (DeFrate, Sun et al. 2004). Two virtual cameras were created to
represent the X-ray sources of the two fluoroscopes. The orthogonal images
were then placed to reproduce the position of the two intensifiers of the two
fluoroscopes. Afterwards the 3D AJC model was imported into the virtual space
and viewed from the 2 virtual cameras and projected onto the corresponding
virtual image intensifiers. The position of the talus, fibular, talus and calcaneus
models were adjusted in 6 degree-of-freedom (DOF) until the projected outlines
of the AJC model matched the actual AJC on the orthogonal images (Fig. 2.3).
The similar procedures were repeated for each foot position. Hence the active
positions of the AJC were reproduced by a series of 3D AJC models. The
method has been demonstrated to be able to determine an object pose in space
with an accuracy of 0.1 mm in position and 0.1 in orientation (DeFrate, Sun et al.
2004).
2.2.4 Kinematics of the AJC
To describe the relative motion of the bones of the AJC, an anatomically
based Cartesian coordinate system was constructed for each subject. The
position of the foot during MR scanning was used as a reference (neutral)
position. Using the 3D model of the talus, a transverse plane containing both
apices of the medial and lateral aspects of the trochlea tali was first determined.
The profile of the trochlea tali was fitted into a series of circular arcs from the
medial to the lateral, which were perpendicular to this transverse plane. The
lowest arc was specified and the plane of this arc was defined as the sagittal
plane of the coordinate system (Fig. 2.4a). Due to talar anatomy, the chosen arc
was always at the middle of the trochlea tali. The center of the arc was used as
the origin of the coordinate system. The Y-axis (medial-lateral axis) was defined
as orthogonal to the sagittal plane from the origin and pointing to the left of the
subject (Fig. 2.4b). At the neutral position, a line on the proximal posterior wall of
the tibia where the sagittal plane intersected the tibia was chosen to represent
the proximal-distal direction. We defined the X-axis (proximal-distal axis) as the
line that was parallel to the proximal-distal line, but passed the origin point. The
Z-axis (anterior-posterior axis) was the product of the X- and Y-axis, which
pointed posteriorly. At the reference position, this coordinate system was
assigned individually to each of the four bones (tibia, fibula, talus and calcaneus)
as body fixed coordinate system (Fig. 2.4b). The reference coordinate system
fixed to the tibia was considered as the fixed laboratory coordinate system.
Therefore at the neutral position all the coordinate systems coincided.
-Origin
(a)
Fitting circular arc
rientation line for X-axis
(b)
Sagittal Plane
I'
Fig. 2.4 (a) Fitting circular arc to the trochlea tali;
(b) anatomically based coordinate system and
rotation angles (fibula not shown).
The AJC motion was defined in two parts, the talocrural joint motion (relative
motion of the talus with respect to the tibia) and subtalar joint motion (relative
motion of the calcaneus with respective to the talus). The ranges of motion of the
talocrural and subtalar joints from maximum dorsiflexion to maximum
plantarflexion, from maximum inversion to maximum eversion, from heel strike to
mid-stance, and from mid-stance to toe off were determined. The total range of
the AJC motion (relative motion of the calcaneus with respect to the tibia) was
also measured in order to examine the contributions of the talocrural and
subtalar joints to the overall AJC motion. Kinematics of each joint was measured
as the rotation and translation of the distal segment coordinate system with
respect to the proximal segment coordinate system.
To make the results easy to present, all the kinematics data about the left
ankles are flipped into right ankles accordingly. Translation was defined as the
origin position of the distal segment coordinate system in the proximal segment
coordinate system. Three rotation angles were used to define the joint rotation in
space (Fig. 2.4b): a described internal-external rotation (rotation around the Xaxis) with positive values corresponding to internal rotation and negative values
corresponding to external rotation; P described plantar-dorsiflexion (rotation
around the Y-axis) with positive values corresponding to plantarflexion and
negative values corresponding to dorsiflexion; y described eversion-inversion
(rotation around the Z-axis) with positive values corresponding to eversion and
negative values corresponding to inversion. The relative rotation between any
two bones was determined using Euler angles(a,3P, y) using a Y-Z-X sequence:
R =R.(a)R, (y)R, ()
(2.1)
where R is the rotation matrix and
10
0
Rx(a) = 0 cosa -sina
(2.2)
0 sina cosa
cos p 0sin,
R,(f8) =
0
1 0
(2.3)
- sin , 0 cos iJ
cosy - sin y 0
R, ()= siny cosy 0
L0
(2.4)
00
A repeated measure ANOVA was used to compare the motion of the
talocrural and subtalar joints. The statistically significant difference was defined
as p < 0.05.
2.3 Results
2.3.1 Kinematics of Non-weight Bearing Positions
Dorsiflexion to Plantarflexion
From maximum dorsiflexion to maximum plantarflexion (Table 2.1), the
AJC (calcaneus motion relative to the tibia) showed 10.8± 9.80 of internal rotation,
50.1 ± 8.70 of plantarflexion and 6.2 ± 7.0 ° of inversion. The translation of the
calcaneus with respect to the tibia was within 2.0 mm.
The motion of the talocrural joint (talus motion with respect to the tibia)
showed 6.7* + 7.1 of internal rotation, 47.5 ± 2.20 of plantarflexion and 1.5 ± 1.4*
of eversion. The talus translated distally (along X-axis) by 0.2 ± 1.0 mm, laterally
(along Y- axis) by 0.5 ± 1.6 mm, and posteriorly (along Z-axis) 0.8 ± 1.4 mm. The
motion of the subtalar joint (calcaneus motion with respect to the talus) during the
same foot motion is 2.8 ± 4.70 of internal rotation, 3.1" ± 6.80 of plantarflexion
and 0.9 ± 10.00 of inversion. The translation of the calcaneus with respect to the
talus included 0.5 ± 0.9 mm of proximal translation, 1.8 ± 2.3 mm of lateral
translation, and 1.2 ± 1.4 mm of posterior translation.
The difference in plantarflexion motion between the talocrural and subtalar
joints was found to be statistically significant (p<=0.00007) (Table 1). The
internal/external rotation and inversion/eversion angles of the two joints were
shown to be statistically similar (p > 0.05). All relative translations of the two
joints were also shown to be similar (p>0.05).
AJC
ER(-)IIR(+)
DF(-)/PF(+))
IV(-)IEV(+)
D(-)/P(+)
L(-)/M(+)
A(-)/P(+)
(")
(0)
(")
(mm)
(mm)
(mm)
10.8±9.8
50.1±8.7
6.2±7.0
1.0±1.9
-1.4±1.8
1.0±2.5
Talocrural
6.7±7.1
47.5._2.2
1.5 1.4
-0.2±1.0 -0.5±1.6
0.8±1.4
Subtalar
2.8±4.7
3.1±6.8
0.5±0.9
1.2±1.4
ER/IR: External Rotation/ Internal Rotation
DF/PF: Dorsiflexion/Plantarflexion
IVIEV: Inversion/Eversion
-0.9±10.0
-1.8±2.3
DIP: Distal/Proximal translation
LIM: Lateral/Medial translation
A/P: Anterior/Posterior translation
Table 2.1 Range of motion of the AJC, talocrural and subtalar joints from
maximum dorsiflexion to maximum plantarflexion. Italic numbers
show statistically significant difference between the motion of the
talocrural and subtalar joints.
Supination to Pronation
From maximum supination to maximum pronation (Table 2.2), the AJC
joint demonstrated 17.2* + 7.50 of external rotation, 10.30 ± 3.00 of dorsiflexion
and 24.5 ± 1.80 of eversion. The translation of the calcaneus with respect to the
tibia was within 5.0 mm.
Motion of the talocrural joint showed 2.40 + 5.40 of external rotation, 1.20 ±
3.50 of dorsiflexion and 2.70 ± 1.80 of eversion. The talus translated proximally by
0.1 ± 0.4 mm, laterally by 0.7 ± 1.1 mm, and posteriorly by 0.2 + 1.0 mm. Motion
of the subtalar joint during the same foot motion was 15.00 ± 6.20 of external
rotation, 9.90 ± 1.70 of dorsiflexion and 21.70 ± 3.20 of eversion. Translation of
the calcaneus with respect to the talus included 1.9 ± 0.9 mm of proximal
translation, 1.5 ± 2.3 mm of medial translation, and 4.2 ± 0.8 mm of posterior
translation.
The external rotation, dorsiflexion and eversion motions of the subtalar
joint were statistically significantly larger than those of the talocrural joint
(p=0.040, 0.015, 0.001). Proximal, medial and posterior translations of the
subtalar joint were significantly higher than those of the talocrural joint (p=0.017,
0.042, 0.005).
AJC
Talocrural
Subtalar
ER(-)/IR(+)
DF(-)IPF(+)
IV(-)/EV(+)
D(-)IP(+)
L(-)/M(+)
A(-)/P(+)
(")
(0)
(0)
(mm)
(mm)
(mm)
-17.2±7.5
-10.3±3.0
24.5±1.8
1.8±1.2
1.0±3.2
4.5±0.5
-2.4±5.4
-1.2±3.5
2.7± 1.8
0. 1±0.4
-0.7±1.1
0.2±1.0
-15.0A
-9.9± 1.7
21.7±3.2
1.9±0.9
1.5±2.3
4.2f0.8
6.2
ERIIR: External Rotation/ Internal Rotation
DFIPF: Dorsiflexion/Plantarfiexion
IVIEV: Inversion/Eversion
DIP: DistallProximal translation
LIM: Lateral/Medial translation
ANP: Anterior/Posterior translation
Table 2.2 Range of motion of the AJC, talocrural and subtalar joints from
maximum supination to maximum pronation. Italic numbers show
statistically significant difference between the motion of the
talocrural and subtalar joints.
2.3.2 Kinematics of Stance Phases of Gait
Heel Strike to Mid-Stance
From heel strike to mid-stance (Table 2.3), the AJC joint demonstrated
3.80 ± 4.60 of internal rotation, 7.50 + 3.0 ° of plantarflexion and 2.30 + 3.20 of
eversion. Translation of the calcaneus with respect to the tibia was within 1.0 mm.
AJC
Talocrural
Subtalar
AJC
Talocrural
Subtalar
ER(-)IIR(+)
DF(-)/PF(+)
(")
(")
IV(-)IEV(+)
(0)
D(-)IP(+)
L(-)/M(+)
A(-)/P(+)
(mm)
(mm)
(mm)
From Heel Strike to Mid-Stance
0.9±0.7 -0.3±0.8
7.5±3.0
2.3±3.2
3.8±4.6
0.1±0.3 0.3±0.8
3.8±8.2
9.1-5.3
-0.1 ±2.6
1.7±2.7
0.6±0.6 -0.5±1.1
-1.5±9.9
-0.9+ 1.2
From Mid-Stance to Toe Off
11.5±10.3 13.4±14.4 -9.9±3.2 -1.5±0.6 0.6±3.3
-2.5±2.0
0.0±0.3
0.4±3.4
-0.3±1.2
-2.1±1.6
-1.6±-5.9
12.3±8.3
4.4±13.0
8.5±2.9
ER/IR: External Rotation/ Internal Rotation
DFIPF: Dorsiflexion/Plantarflexion
IVIEV: Inversion/Eversion
-1.7±2.7
-10.7±3.8
0.0±1.0
-1.5±0.8
0.2±1.1
0.2±1.3
0.2±0.7
DIP: Distal/Proximal translation
L/M: Lateral/Medial translation
A/P: Anterior/Posterior translation
Table 2.3 Range of motion of the AJC, talocrural and subtalar joints during the
stance phase of walking. Italic numbers show statistically significant
difference between the motion of the talocrural and subtalar joints.
Motion of the talocrural joint showed 3.80 ± 8.20 of internal rotation, 9.10 +
5.30 of plantarflexion and 0.1
2.60 of inversion. The talus translated proximally
by 0.1 ± 0.3 mm, medially by 0.3 ± 0.8 mm, and posteriorly by 0.2 ± 1.3 mm. The
motion of the subtalar joint during the same foot motion was 1.50"
9.90 of
external rotation, 0.9* ± 1.20 of dorsiflexion and 1.70 ± 2.7" of eversion.
Translation of the calcaneus with respect to the talus was 0.6 ± 0.7 mm
proximally, 0.5 ± 1.1 mm laterally, and 0.2 ± 0.7 mm posteriorly.
The plantarflexion motion of the talocrural joint was statistically
significantly larger than that of the subtalar joint (p=0.021). The internal-external
rotation and inversion-eversion angles of the two joints were statistically similar
(p > 0.05). All translations of the two joints were shown to be similar (p> 0.05).
Mid-Stance to Toe-Off
From mid-stance to toe-off (Table 2.3), the AJC joint demonstrated 11.5* +
10.3* of internal rotation, 13.40 + 14.40 of plantarflexion and 9.90 ± 3.20 of
inversion. Translation of the calcaneus with respect to the tibia was within 3.0
mm.
Motion of the talocrural joint showed 1.6* + 5.90 of external rotation, 4.40 ±
13.20 of plantarflexion and 1.70 ± 2.70 of inversion. The talus translated
proximally 0.0 ± 1.0 mm, medially 0.0 ± 0.3 mm, and anteriorly 0.3 ± 1.2 mm. The
motion of the subtalar joint during the same foot motion was 12.30"
8.30 of
internal rotation, 8.50 ± 2.90 of plantarflexion, and 10.7* ± 3.80 of inversion.
Translation of the calcaneus with respect to the talus demonstrated 1.5 ± 0.8 mm
of distal translation, 0.4 ± 3.4 mm of lateral translation, and 2.1 ± 1.6 mm of
anterior translation.
The internal rotation and inversion motions of the subtalar joint were
statistically significantly larger than that of the talocrural joint (p=0.046, 0.020).
The dorsi/plantarflexion motions of the two joint were shown to be statistically
similar (p > 0.05). All translations of the two joints were also shown to be
statistically similar (p > 0.05).
2.4 Discussion
The AJC is a complicated joint consisting of multi-bony segments. Previous
studies extensively used cadaveric experimental setups to measure ankle joint
kinematics (Engsberg 1987; Siegler, Chen et al. 1988; Kitaoka, Lundberg et al.
1995; Kitaoka, Luo et al. 1997; Parenteau, Viano et al. 1998; Leardini, O'Connor
et al. 1999; Leardini, Stagni et al. 2001) . In-vivo ankle joint motion has also been
reported in literature (Lundberg 1989; Lundberg, Goldie et al. 1989; Lundberg,
Svensson et al. 1989; Lundberg, Svensson et al. 1989; Kepple, Stanhope et al.
1990; Scott and Winter 1991; Nigg, Fisher et al. 1992; Moseley, Smith et al. 1996;
Reinschmidt 1997; Reinschmidt, van Den Bogert et al. 1997; Westblad,
Hashimoto et al. 2002; Siegler, Udupa et al. 2005; Mattingly In Press). However,
accurate description of the AJC kinematics during functional activities still
presents a challenge in biomedical engineering. This Chapter investigated the invivo AJC kinematics during various ankle joint motions using a newly developed
dual-orthogonal fluoroscopic and MR imaging technique(DeFrate, Sun et al.
2004). The data demonstrated that the AJC motion is represented by coupled
motion of the talocrural and subtalar joints during active AJC motion.
Our data showed that from active maximum dorsiflexion to maximum
plantarflexion, the AJC had a plantarflexion angle of 50.1 ± 8.70, where the
talocrural joint plantarflexed by 47.50 while the subtalar joint only plantarflexed by
3.10. The talocrural internally rotated and everted while the subtalar internally
rotated and inverted during this AJC motion even though in smaller scales
compared to the sagittal plane rotation. This indicated that the rotation of the AJC
in the sagittal plane is mostly due to the talocrural joint during active dorsiflexion
and plantarflexion of the AJC.
Lundberg et al. (Lundberg, Goldie et al. 1989; Lundberg, Svensson et al.
1989) have investigated the range of in-vivo talocrural and subtalar joints motion
under body weight using radiostereometric analysis (RSA) technique. For ±30*
dorsi/plantarflexion of the foot position (approximately from 20.9" dorsiflexion to
30.10 plantarflexion of the AJC), the talocrural joint internally rotated,
plantarflexed and everted while the subtalar joint internally rotated, plantarflexed
and inverted. Their data showed similar motion pattern as our data (Table 2.1). In
another in-vivo study, Mattingly et al. (Mattingly, Talwalkar et al. 2006) performed
a 3D
MR
imaging
kinematic study of the AJC during
constrained
dorsi/plantarflexion. Virtually no subtalar joint motion was observed in this study.
The constraint to the AJC motion in other planes in this experiment might be the
factor that limited the subtalar joint motion.
From active maximum inversion to maximum eversion motion of the foot, the
AJC had statistically significantly higher external rotation, dorsiflexion and
eversion angles than those of the talocrucral joint. These results reveal that most
rotation caused by active inversion and eversion took place in the subtalar joint.
This motion is analogous to a counter-clockwise corkscrew rotation. The hollow
of sinus tarsi affords space for the anterior process of the calcaneus to migrate
into during this action.
However,
between
±200
inversion/eversion
(pronation/supination
in
(Lundberg, Svensson et al. 1989)) of the foot position (approximately from 5.90
inversion to 3.6° eversion of the AJC), Lundberg et al. (Lundberg, Svensson et al.
1989) reported lower ranges of internal/external rotation, dorsi/plantarflexion and
inversion/eversion of the subtalar joint compared to our data as presented in
Table 2. This difference may be due to the fact that our subjects performed
maximum active inversion and eversion motion while the subjects in (Lundberg,
Svensson et al. 1989) performed much less range of inversion and eversion.
Recently Siegler et al. (Siegler, Udupa et al. 2005) studied the AJC kinematics
during inversion with 3D MR imaging. In response to an inversion moment, this
study showed that internal rotation and plantarfiexion occurred at the talocrural
joint while the subtalar joint internal rotated without plantarflexion. However, our
data showed that both the talocrural and subtalar joints externally rotated and
dorsiflexed during inversion-to-eversion motion. Higher range of motion at the
subtalar joint than that at the talocrural joint was observed in our study. This
difference may be due to the fact that their data was obtained from inversion
motion only while our data also included eversion motion.
From heel strike to mid-stance during the stance phase of walking, the
talocrural joint plantarflexed by 9.10 while the subtalar joint dorsiflexed by 0.9°.
The talocrural joint also internally rotated and inverted while the subtalar joint
externally rotated and everted. In average, the rotations around the three axes
were opposite for the two joints. From mid-stance to toe off, the talocrural joint
only externally rotated by 1.60 and inverted by 1.70, while the subtalar joint
internally rotated by 12.30 and inverted by 10.70. Both of them also plantarflexed.
These data indicate that during the stance phase of walking there is a
complicated combination of the motion of the talocrural and subtalar joints (Fig.
2.5). The talocrural and subtalar joints function synergistically to transfer the
ground reaction forces through the ankle joint complex and keep the body stable.
Since the load on the foot changes from low load at heel strike, to full body
weight at mid-stance, and to minimal bodyweight at toe off (Chao, Laughman et
al. 1983), the motion patterns of the talocrural and subtalar joints indicate that
subtalar joint's internal rotation and inversion increased significantly during midstance to toe-off. This motion pattern suggests that the weightbearing condition
has a strong effect on subtalar joint motion. Talocrural internal/external rotation
and inversion/eversion however, was far less influenced by the weightbearing
condition.
Few studies have reported AJC motion during walking cycles. With the
intracortical pins, Arndt et al. (Arndt, Westblad et al. 2004) investigated the
kinematics of AJC as talocrural and subtalar joints separately during the stance
phase of walking. Equal proportion of internal/external rotation was found at the
subtalar joint and the talocrural joint, which was different from our results. We
found statistically significantly larger internal rotation and eversion at the subtalar
joint than those at the talocrural joint from mid-stance to toe off. The difference
might attribute to different coordinate systems used in our study and their study. It
might also be caused by the intracortical pins inserted on the bones thus
interfering bone motion in (Arndt, Westblad et al. 2004) while our study was non-
invasive in nature.
The data in this chapter shows that the talocrural joint contributes more in
dorsi/plantarfiexion,
while
the
subtalar joint is
more
responsible for
inversion/eversion and internal/external rotation of the AJC joint. The data
quantitatively highlights the well-accepted role the subtalar joint plays in
balancing the body during functional activities, especially when ground reaction
forces generate an inversion or eversion moment on the foot (e.g., when
stepping on an uneven road). Since there is no extrinsic or intrinsic muscle
inserting on the talus except ligament connections, the talus plays a passive, but
crucial role in transferring motion between the tibia and calcaneus. Proper
subtalar joint positioning may be necessary to keep body upright during walking,
running, especially on uneven ground.
The kinematic data in this chapter might have important clinical implications.
Besides highlighting the knowledge of the in-vivo AJC motion both during normal
open kinematic chain motion (plantarflexion, dorsiflexion, inversion, eversion)
and normal closed kinematic chain motion (stance phase of walking), the results
may provide an in-vivo database to the quantitative clinical diagnosis, treatment
and evaluation of the AJC. Geometrical changes to the subtalar joint could affect
the overall AJC function. For example, after the subtalar fusion surgery, the talus
and the calcaneus are fused together and move as a rigid body. Based on the
functional kinematics pattern of the subtalar joint observed in this chapter, the
fusion might limit the ankle joint motion, and cause stressing on the other
structures, such as ligaments and cartilage. This may be part of the reason to the
abnormal ankle function and post-operative osteoarthritis caused by the subtalar
fusion surgery fusion and triple arthrodesis (Graves, Mann et al. 1993; Saltzman,
Fehrle et al. 1999; Thermann, Hufner et al. 1999). Therefore, a surgical treatment
of the AJC should be aimed at restoring the normal geometrical relationship of
the joints, so that normal AJC kinematics could be recovered.
The technique described in this chapter has multiple advantages: it allows for
in-vivo measuring in weight-bearing and nonweightbearing positions; it allows for
muscle contraction during measurements;
and it allows for quantitative
measurements of rotation and translation in all planes of motion. The technique
is noninvasive, thus making subject recruitment easier. The 3D anatomic AJC
model can also include the ligaments and cartilage, therefore, providing the
capability to investigate in-vivo ligament elongation and articulate cartilage
contact kinematics (DeFrate, Gill et al. 2004; Li, DeFrate et al. 2005; Li, Defrate
et al. 2005).
In summary, a new fluoroscopic and MR imaging technique was used to
investigate the in-vivo kinematics of the talocrural and subtalar joints. The results
concluded that there is a strong coupling between the talocrural and subtalar
joints during normal function of the AJC. Talocrural joint contributes more to the
input of plantarldorsiflexion while the subtalar joint contributes more to the input
of inversion/eversion. The motion of the talocrural joint is more significant during
the early period of the stance phase of walking (from heel strike to mid-stance).
However, the subtalar joint rotates more during the later period of the stance
phase of walking (form mid-stance to toe off). The data may help to understand
normal ankle joint function and provide indications for surgical treatment of ankle
injuries. Ultimately, it is our goal to study various disease states and operative
interventions as they relate to AJC kinematics.
Hen•l
I ll
E
-Stance
,
I, I rl%
Fig. 2.5 Medial view of the AJC during the stance phase of
walking with tibia fixed (fibula not shown). Blue: Heel
Strike; Red: Mid-Stance; Green: Toe Off.
Chapter 3:
In-vivo Cartilage
Contact of the Human Ankle Joint
3.1 Introduction
The talocrural (ankle) joint is an important weightbearing articulation in the
human body. Ground reaction forces transmitted through the talocrural joint were
reported to be two to three times the body weight during gait (Procter and Paul
1982; Nuber 1988). However, very few studies have reported on in-vivo articular
cartilage contact behavior of the talocrural joint. This knowledge is critical for
understanding the pathogenesis of joint diseases such as osteoarthritis and for
the design of ankle joint arthroplasties since abnormal contact mechanics is
generally believed to cause osteoarthritis (Llinas, McKellop et al. 1993).
Talocrural joint contact has been studied mostly using in-vitro cadaveric
ankle specimens (Ramsey and Hamilton 1976; Wagner, Tarr et al. 1984; Tarr,
Resnick et al. 1985; Ting, Tarr et al. 1987; Bruns and Rosenbach 1990;
Beaudoin, Fiore et al. 1991; Calhoun, Li et al. 1994; Christensen, Driscoll et al.
1994; Driscoll, Christensen et al. 1994; Pereira, Koval et al. 1996; Steffensmeier,
Saltzman et al. 1996; Kura, Kitaoka et al. 1998; Michelson, Checcone et al. 2001;
Corazza, Stagni et al. 2005). For example, Ramsey and Hamilton (Ramsey and
Hamilton 1976) used carbon black transference techniques to determine the
contact area in the tibiotalar articulations with the talus in its neutral position and
displaced laterally. Others used pressure sensors or pressure-sensitive film to
determine the contact areas and pressure distributions on the proximal talar
surface under various simulated talocrural conditions (Wagner, Tarr et al. 1984;
Tarr, Resnick et al. 1985; Ting, Tarr et al. 1987; Bruns and Rosenbach 1990;
Beaudoin, Fiore et al. 1991; Calhoun, Li et al. 1994; Christensen, Driscoll et al.
1994; Driscoll, Christensen et al. 1994; Pereira, Koval et al. 1996; Steffensmeier,
Saltzman et al. 1996; Michelson, Checcone et al. 2001). Kinematic tracking
methods have also been used to determine ankle joint contact area (Kura,
Kitaoka et al. 1998; Corazza, Stagni et al. 2005), such as the magnetic tracking
device combined with proximity calculations of digitized joint surfaces used by
Kura et al. (Kura, Kitaoka et al. 1998); the combining radiostereometric analysis
(RSA) and 3-dimensional (3D) surface modeling method used by Corazza et al.
(Corazza, Stagni et al. 2005). Despite these various in-vitro investigations,
measurement of in-vivo cartilage contact areas of the talocrural joint under
functional loading conditions remains a challenge in biomedical engineering.
Recently, the novel technique using dual-orthogonal fluoroscopic images
and magnetic resonance (MR) image-based computer models as described in
chapter 2 was introduced to study in-vivo articular cartilage contact kinematics of
the knee (DeFrate, Sun et al. 2004; Li, Wuerz et al. 2004; Li, DeFrate et al. 2005).
In this chapter, this method was adapted to study the in-vivo articular cartilage
contact patterns of the talocrural joint on both the distal tibia and proximal talus_at
three weightbearing positions that simulated three positions of the stance phase
of walking. MR image-based talocrural joint models were used to reproduce the 6
degrees-of-freedom (DOF) in-vivo ankle positions. Cartilage-to-cartilage contact
area was then determined by quantifying the amount of overlap of the cartilage
surfaces of the tibia and talus. The methodology used to measure talocrural
cartilage contact area was validated using an in-vitro experimental setup.
3.2 Methodology
3.2.1 MR Imaging and 3D Model
Nine normal ankles from 7 healthy volunteers (3 males and 4 females, 24
to 45 years old) were recruited with the approval of our institutional review board
(IRB). The averaged body weight of the volunteers was 67.4±13.1 kg and the
averaged height was 169.3 ± 10.3 cm. The averaged body mass index (BMI) was
23.9 ± 4.4. Two male volunteers had both of their ankles studied while others had
only one. Four ankles were left and five were right. The ankles had no history of
injuries and no signs of osteoarthritis.
Each ankle recruited for this chapter was MR imaged on a 1.5-T magnet
(GE, Milwaukee, WI) using a surface coil and three-dimensional spoiled gradientrecalled (3D SPGR) sequence with the subject lying supine (TR=48ms,
TE=4.3ms, Flip Angle=45 0 , FOV=16x16cm 2 ). A cubic volume (16 x 16x 10cm 3)
enclosing the talocrural joint was MR scanned with 16 cm in both anteriorposterior and proximal-distal directions (Fig. 3.1a) and 10 cm in medial-lateral
direction. Parallel sagittal images with a resolution of 512x512 pixels were
separated at 1 mm intervals. For each ankle, the scan time was approximately 11
minutes. The MR images were imported into a solid modeling software package
(Rhinoceros@, Seattle, WA) for digitization of the outlines of the tibia, talus and
their cartilage surfaces. The digitized spatial data (x, y, z coordinates) were then
linked using B-spline curves to reproduce the contours of the tibia and talus.
Bone and cartilage surfaces of the tibia and talus were created from the contours
1
L
(a)
(b)
istal tibial
cartilage
roximal talar
cartilage
us
Fig. 3.1 (a) A typical sagittal plane MR image of the talocrural
joint; (b) 3D bony and cartilage models of the talocrural
joint.
using polygon mesh. This method has been used extensively in previous
publication (Li, Lopez et al. 2001). A typical talocrural joint model constructed
from MR images is shown in Fig. 3.1b.
3.2.2 Dual Orthogonal Fluoroscopic System
A dual-orthogonal fluoroscopic imaging system was used to measure invivo ankle joint kinematics (de Asia, Wan et al. 2005). In this system, two
fluoroscopes (OEC@ 9800 ESP, GE, Salt Lake City) were positioned in such a
way that the two image intensifiers were perpendicular to each other in the
horizontal plane (Hanson, Suggs et al. 2005). During the experiment, the subject
walked on a platform and once the ankle was in front of the two image
intensifiers, the ankle positions were recorded simultaneously from anteromedial
and anterolateral directions by the two fluoroscopes (Fig. 3.2). The resolution of
the images collected from the fluoroscopes was 1000x1000 pixels. Various ankle
positions during functional activities can be recorded using this system. In this
chapter, each subject was instructed to reproduce three ankle positions
representative during the stance phase of level walking: heel strike (at the early
phase of walking, the heel of the target foot touches the ground and carries
partial body weight), mid-stance (at the middle phase of walking, the target foot
carries full body weight), and toe off (at the late phase of walking, only the toes of
the target foot touch the ground and carry partial body weight). At each of these
positions, the ankle was held still for one second for the two fluoroscopes to
capture the ankle position.
(a)
(b)
Heel Strike
Mid-stance
Toe Off
Fig. 3.2 (a) The dual-orthogonal fluoroscopic system setup for
measurement of in-vivo ankle joint kinematics. (b) three
weightbearing positions of the foot captured in this chapter.
3.2.3 Determination of In-vivo Cartilage Contact Area
To determine in-vivo talocrural joint kinematics, the 3D talocrural joint
model and the orthogonal fluoroscopic images were imported into the solid
modeling software to create a virtual dual-orthogonal fluoroscopic system (de
Asia, Wan et al. 2005). Two virtual cameras were created to reproduce the
positions of the X-ray sources of the two fluoroscopes during the imaging
acquisition. The orthogonal images were placed as two virtual image intensifiers
(Fig. 3.3a). The 3D talocrural joint model was then imported into the virtual space.
The virtual cameras projected the joint model onto the corresponding virtual
image intensifiers (Fig. 3.3a). The positions of the tibial and talus models were
manually adjusted individually in 6DOF until their projections matched the
contours of the actual talocrural joint on the two fluoroscopic images (Fig. 3.3a).
The 3D talocrural joint model then reproduced the in-vivo ankle position recorded
on the dual fluoroscopic images (Fig. 3.3b).
Once the talocrural joint positions were determined, the relative positions
of the cartilage surfaces of the tibia and talus were determined. At each ankle
position reproduced in the virtual space, the tibial and talar cartilage surfaces (of
the ankle model) showed partial overlap. In this chapter, this overlap was
assumed to indicate the locations where the articular surfaces were in contact.
The area was determined by identifying the intersection of the cartilage surfaces,
with the use of the solid modeling software.
To study the contact patterns at the talocrural joint, both tibial and talar
surfaces were evenly divided into nine sub-regions (Fig. 3.4(a) and 3.4(b)). Each
sub-region was labeled by two letters in vertical and horizontal directions,
respectively. Similar to the contact frequency as defined in previously published
data on ankle and shoulder joints (Soslowsky, Flatow et al. 1992; Kura, Kitaoka
et al. 1998), we defined a modified contact frequency to describe the contact
patterns at the talocrural joint in this chapter as the percentage of the contact
area at a sub-region with respect to the overall contact.
z
(a)
(b)
Heel Strike
Mid-stance
Toe Off
Fig. 3.3 (a) The virtual dual fluoroscopic system used to reproduce
the in-vivo talocrural position; (b) medial view of the
talocrural joint during the stance phase of walking (cartilage
not shown) reproduced using the virtual dual fluoroscopic
system.
(a)
Posterior
I
Lateral
\
Anterior
Medial
I
(b)
i
Tal
Posterior
Fig.3.4 (a) Nine sub-regions of the distal tibial cartilage surface; (b)
nine sub-regions of the proximal talar cartilage surface. The 9
sub-regions are identified by the letters on both the tibial and
talar cartilage surfaces.
3.2.4 System Validation
A validation was performed to assess the accuracy of the combined MR
and fluoroscopic imaging technique when used to measure cartilage contact
areas of the talocrural joint. A human cadaveric foot specimen (male, 68 years
old) with a 40 cm tibia shaft was MR imaged and a 3D anatomic talocrural joint
model was constructed, including the bony surfaces of the tibia and talus, as well
as the corresponding cartilage surfaces.
After the MR imaging scan, the talocrural joint was separated at the
talocrural joint line and installed on a robotic testing system (Li, Most et al. 2004).
In this setup, the foot of the specimen was rigidly fixed on a pedestal while the
tibia was fixed to the robot through a 6 DOF load cell. The talus was left on the
foot and not fixed using additional constraints. The robot could apply a load to the
tibia, causing talocrural joint compression. In this validation study, the ankle was
loaded along the tibial axis to about 200N. The robot recorded the ankle position
under the load. The talocrural joint was then separated and liquid silicone rubber
(Stormont, An et al. 1985) was placed between the tibia and the talus. The tibia
was returned to the position measured by the robot under the 200N axial load.
The silicon rubber was squeezed away from the area of articular cartilage contact
and was kept in that position for 1 minute until the rubber hardened. The
talocrural joint was then imaged using the dual-orthogonal fluoroscopic image
system. The ankle was separated immediately to digitize the contact area. The
entire procedure took less than 5 minutes. The ankle joint was sprayed regularly
with saline to keep the joint from dehydrating. The cartilage contact area was
represented by a hole in the silicone rubber (Fig. 3.5a), which was digitized using
a stylus (Microscribe 3DX@, Immersion Technologies, San Jose, CA). In addition,
anatomic landmarks on the tibia and talus were also digitized so that the contact
area measured from the silicone casting method could be aligned with the 3D
talocrural model. The actual contact area could be compared to that obtained
from the image matching method.
The pair of fluoroscopic images of the ankle captured when the ankle joint
was under compression and the 3D models of the tibia and talus were used to
reproduce the ankle position in the virtual fluoroscopic system using the same
procedures as for the in-vivo study mentioned before. The ankle position under
load was matched five times independently in this validation study to evaluate the
repeatability of the matching process in determination of cartilage contact area.
The cartilage contact area determined in this fashion was then compared with
that measured from the silicone casting method, which represented a rigorous
validation of the contact area obtained using the combined MR and dualorthogonal fluoroscopic imaging technique.
Contour from silicon casting
I\
urs from
ing processes
(a)
(b)
Fig.3.5 (a) the contact pattern measured using silicone casting
method in a cadaveric foot specimen; (b) 3D talus model
with blue contour representing the contact pattern from
silicone casting method and green contours representing the
contact patterns obtained from five image matching
processes
3.2.5 Data Analysis
Inthis chapter, I first presented the data that validated the accuracy of the
image matching method in determination of the articular cartilage contact area.
We then presented the cartilage contact areas of the talocrural joint at various
weightbearing conditions, i.e., simulated heel strike, mid-stance and toe off
positions. The cartilage contact frequencies on both the tibial and talar surfaces
were calculated to describe cartilage contact patterns. A repeated measure
ANOVA was used to compare the cartilage contact areas between different foot
positions. The statistically significant difference was defined as p < 0.05.
3.3 Result
3.3.1 System Validation
in the in-vitro validation study, the cartilage contact area at the talocrural
joint measured using the silicon casting method was 579.1 mm2 under a 200 N
compressive load (Fig. 3.5a). The contact area measures obtained from the five
independent image matching processes averaged 568.9 ± 22.2 mm2 (Fig. 3.5b).
The coefficient of variance (the ratio of the standard deviation to the mean value,
as a percentage) was 3.9%. This area measurement (by the computational
method) was approximately 3.4% smaller than the physical measurement by the
silicon casting method (579.1 mm2).
Posterior
Tibia
Medial
Anterior
Lateral
Talus
Posterior
Heel Strike
Mid-stance
Toe Off
Fig.3.6 In-vivo cartilage contact patterns during the simulated stance
phase of walking of a typical talocrural joint.
500UU
N
I
*
I
I
450
E 400*
m 350-
* 300-
m
I
I
5 2500 200-
o150: 100o
50
v
Heel Strike
Mid-stance
Toe Off
Fig.3.7 Talocrural cartilage contact areas during the simulated stance
phase of walking. *p<0.05.
3.3.2 In-vivo Cartilage Contact Area at Talocrural
Joint
Cartilage coverage areas of each talocrural joint were calculated. The
average cartilage coverage area of the nine ankles was 964.9 ± 156.1 mm2 on
the tibial surface and 1304.8 ± 208.4 mm2 on the talar surface.
The cartilage contact areas of a typical talocrural joint during the simulated
stance phase of walking are illustrated in Fig. 3.6. At heel strike position, the
average contact area of the nine ankles was 272.7 ± 61.1 mm2 (Fig. 3.7), which
accounted for 28.2 ± 4.2% of the tibial cartilage surface area and 20.9 ± 3.6% of
the talar cartilage surface area. At mid-stance position, the cartilage contact area
was 416.8 ± 51.7 mm2, which accounted for 43.7 ± 5.5% of the tibial cartilage
surface area and 31.0 ± 5.0% of the talar cartilage surface area. At toe off
position, the cartilage contact area was 335.7 ± 64.5 mm2, which accounted for
34.8 ± 4.1% of the tibial cartilage surface area and 25.8 ± 3.9% of the talar
cartilage surface area. The contact area at simulated mid-stance was
significantly larger than those at simulated heel strike (p=0.0001) and toe off
(p=0.0004), while the contact area at simulated heel strike was significantly
smaller than that at simulated toe off (p=0.0028) (Fig. 3.7).
3.3.3 In-vivo Cartilage Contact Patterns at Talocrural
Joint
Cartilage contact frequencies of the talocrural joint at different foot
positions during the simulated stance phase of walking are shown in Table
3.1. The average flexion angles of the talocrural joint was calculated using
the same protocol as in our previous work (de Asia, Wan et al. 2005).
From heel strike to mid-stance, the talocrural joint plantarflexed 4.9 ± 8.10
in these nine subjects. From mid-stance to toe off, the talocrural joint only
plantarflexed 0.2 ± 12.50. At the simulated heel strike position, the highest
contact frequency on the tibial surface was observed at the lateral-central
sub-region (18.9 ± 13.4%) and lowest at the medial-posterior sub-region
(3.5 ± 9.6%). On the talar surface, the highest contact frequency was also
measured at the lateral-central sub-region (22.1 ± 15.0%) and the lowest
was at the medial-posterior sub-region (0.6 ± 1.7%). At the simulated midstance position, the highest contact frequency was observed at the lateralcentral sub-region (21.4 ± 3.9%) and the lowest was at the medialposterior sub-region (1.4 ± 3.7%) of the tibial surface. On the talar surface,
the highest contact frequency was found also at the lateral-central subregion (24.5 ± 7.8%) and lowest at the medial-posterior sub-region (1.4 ±
2.5%). At the simulated toe off position, the highest contact frequency was
measured at the central-central sub-region of the tibial surface (18.5 +
7.1%) and the lowest was at the lateral-posterior sub-region (1.7 ± 1.9%).
On the talar surface, the highest contact frequency was also at the centralcentral sub-region (17.8 ± 11.9%) and lowest at the lateral-posterior subregion (5.5 ± 5.6%).
(a)
9.3±10.3
4.4±4.3
1.7±1.9
13.8±12.8
10.0±11.5
10.6±10.5
3.5±9.6
1.4±3.7
6.1±9.1
Heel Strike 18.9±13.4
Mid-stance 21.4±3.9
Toe Off 15.9±10.9
Heel Strike 10.0+9.2
Mid-stance 13.8±6.9
13.2±8.5
Toe Off
11.4±7.5
20.0+5.6
18.5±7.1
7.7±13.4
17.8±15.3
15.5±6.4
18.2±10.5
7.6±6.9
8.4±7.1
7.5±5.7
Heel Strike
Mid-stance
Toe Off
(b)
H
G
Heel Strike 9.6±10.4
Mid-stance 7.8±5.5
Toe Off
10.8±12.8
Heel Strike 22.1+15.0
Mid-stance 24.5±7.8
16.2±12.8
Toe Off
Heel Strike 8.0+7.9
Mid-stance 5.7±4.7
5.5±5.6
Toe Off
5.1± 4.6
8.3±7.7
D
E
F
I
17.1+_19.1
10.9±8.8
13.7±116.1
7.6±9.6
5.8±6.7
5.9±7.3
J
13.3+_11.5
22.6±4.9
17.8±11.9
11.4±22.2
9.8±8.1
9.7±+13.5
K
10.3±11.7
11.4±12.7
12.6±16.0
0.6± 1.7
1.4±2.5
7.8±12.6
L
Table 3.1 (a) the modified contact frequencies (%) at the sub-regions of tibial
cartilage surface corresponding to Figure 4(a) at different positions of
the simulated stance phase of walking; (b) the modified contact
frequencies (%) at the sub-regions of talar cartilage surface
corresponding to Figure 3.4(b) at different positions of the simulated
stance phase of walking.
100
3.4 Discussion
This chapter investigated the in-vivo articular cartilage contact area at the
talocrural joint under weightbearing conditions that simulated the stance phase of
walking using a combined MR and dual-orthogonal fluoroscopic imaging
technique. Our validation demonstrated that the cartilage contact area at the
talocrural joint could be accurately determined using this imaging technique.
Coverage areas of cartilage surfaces of the talocrural joint have been
reported in several studies (Greenwald, Matejczyk et al. 1976; Bruns and
Rosenbach 1990; Kura, Kitaoka et al. 1998; Al-Ali, Graichen et al. 2002). Al-Ali et
al. (Al-Ali, Graichen et al. 2002) reported a 1020 ± 188 mm2 of cartilage coverage
area at the tibial mortise and 1390 ± 274 mm2 at the trochlea tali in 16 talocrural
joints. Kura et al. (Kura, Kitaoka et al. 1998) reported a central tibial mortise
cartilage coverage area of 922 ± 120 mm2. Greenwald et al. (Greenwald,
Matejczyk et al. 1976) measured a 1329.0 ± 167.7 mm2 of the trochlea tali
cartilage coverage area, while Bruns et al (Bruns and Rosenbach 1990)
measured a 1196.7 ± 190.4 mm2 of trochlea tali cartilage coverage area.
Although there is no unique standard on definition of the boundaries of cartilage
coverage areas of the tibial mortise and trochlea tali, all these data were similar
with ours, where a 964.9 ± 156.1 mm2 was measured for the tibial mortise and
1304.8 ± 208.4 mm2 for the trochlea tali cartilage areas.
Cadaveric experimental setups have been used in various studies to
estimate cartilage contact areas at the talocrural joint (Ramsey and Hamilton
101
1976; Kimizuka, Kurosawa et al. 1980; Bruns and Rosenbach 1990; Driscoll,
Christensen et al. 1994). Most of these experiments used pressure sensors or
pressure-sensitive film. Kimizuka et al. (Kimizuka, Kurosawa et al. 1980)
measured average in-vitro talocrural contact areas of 434 mm 2 and 484 mm2
under 1000N and 1500N compressive loads, respectively. Driscoll et al. (Driscoll,
Christensen et al. 1994) measured a total contact area of 327.4 ± 31.9 mm 2
under a compressive load of 800N with 10% of the load applied through the
fibula. Ramsey et al. (Ramsey and Hamilton 1976) reported a contact area of
440 ± 121 mm 2 under a compressive load of 700 N. Under a 500 N loading,
Kimizuka et al. (Kimizuka, Kurosawa et al. 1980) measured a contact area of 343
mm 2 in the talocrural joint while Bruns et al. (Bruns and Rosenbach 1990)
measured a contact area of 155.1 ± 60.3 mm 2 under the same load later. Our
data indicated that under weightbearing conditions that simulated the stance
phase of walking, the mean cartilage contact area of the talocrural joint was
between 272 and 417 mm 2 . All these various studies demonstrated that the
cartilage contact areas were less than 500 mm 2 at the talocrural joint.
The results of this chapter indicated that articular cartilage contact was
only observed in less than 50% of the cartilage coverage areas in the talocrural
joint at various positions of the simulated stance phase of walking. Since the
exact in-vivo loading condition at the talocrural joint is unknown, it is difficult to
compare our data with those reported in the literature. Our in-vivo cartilage
contact data showed significant changes in cartilage contact areas at different
positions that simulated those during the stance phase of walking (Fig. 3.7). This
102
might be indicative of the effect of the varying loading conditions throughout the
simulated stance phase of walking as well as the complicated geometry of the
joint. The cartilage of the talocrural joint was only partially loaded during the
various in-vivo loading conditions.
Contact frequency has been used in literature to represent the locations of
cartilage contact in articular joints such as the ankle (Kura, Kitaoka et al. 1998)
and the shoulder (Soslowsky, Flatow et al. 1992). In this chapter, we divided the
cartilage surfaces of the talocrural joint into 9 sub-regions. The percentage of the
contact area in a sub-region was defined as the contact frequency in the subregion. In the three ankle positions studied in this chapter, the highest contact
frequency was less than 25%, indicating no dominancy of the contact locations
was found. The lowest contact frequencies were always found at the posterior
regions on both the tibial and talar surfaces. In general, the contact areas were
found to be slightly more lateral and central at heel strike and mid-stance
positions (Fig. 3.4). This contact pattern might correlate to the ankle kinematics
during the gait. Eversion (valgus) positioned hindfeet were generally observed
from heel strike to mid-stance during the stance phase of walking (Moseley,
Smith et al. 1996; Arndt, Westblad et al. 2004; de Asia, Wan et al. 2005). As
reported in our previous work about the 6 DOF kinematics of human ankle joint
complex (de Asia, Wan et al. 2005), the motion of the joint at these positions was
not simply dorsi-plantar flexion, inversion-eversion or internal-external rotation,
but rather a coupled motion. Small joint position changes may cause significant
changes of contact area. Our data indicated that an eversion ankle position
103
might shift the in-vivo talocrural joint contact more laterally, which has also been
observed in previous cadaveric experiments (Moseley, Smith et al. 1996; Arndt,
Westblad et al. 2004; de Asia, Wan et al. 2005). From mid-stance to toe off
positions, the most frequent contact region slightly shifted to more central. This
might be caused by the reduced eversion of the ankle during this motion as
stated in other literature (Calhoun, Li et al. 1994).
There are several limitations that should be noted in this chapter. We used
overlap of two cartilage surfaces to represent the cartilage contact area. This
might underestimate the contact area since the cartilage deforms under load.
Deformation of the cartilage might result in larger contact area than the
overlapping area. This method was only validated under a static loading
condition. The validation test indicated that the image matching method caused a
3.4% underestimate in the contact area under a 200N load. Therefore, the image
matching method could provide a useful estimation of the in-vivo talocrural
cartilage contact areas.
The contact stress distributions in the cartilage layers were not obtained in
this chapter. However, the contact kinematics of the talocrural joint determined
from this chapter may be used as a displacement boundary condition for a 3D
finite element analysis to calculate the actual cartilage contact areas and stress
distributions within the talocrural joint. To do this, the constitutive behavior of the
in-vivo cartilage must be known a priori, which makes the in-vivo finite element
analysis challenging. Another limitation of this chapter is that we only
investigated three positions during the simulated stance phase of walking and
104
none of these positions were captured in real time during walking (de Asia, Wan
et al. 2005). It is known that the cartilage deformation is time-dependent.
Cartilage contact behavior may need to be described as a function of loading
history of the functional activity. Future study will investigate the talocrural
cartilage contact areas and stress distributions during the real dynamic stance
phase of walking using cine-fluoroscopy.
Inconclusion, the combined MR and dual-orthogonal fluoroscopic imaging
method was shown to be a valuable tool for the determination of the in-vivo
articular cartilage contact areas of the talocrural joint at various weightbearing
ankle positions. At the positions that simulated the stance phase of walking, the
contact area was less than half of the cartilage coverage areas of the tibial and
talar surfaces. The contact areas were shown to be slightly more lateral and
central on the talocrural joint surfaces; and in general, the posterior portion of the
talocrural joint showed lower contact frequencies as compared with other regions.
These quantitative data may be useful for the development of 3D finite element
modeling of in-vivo cartilage contact stress. This methodology can also be used
to investigate the contact biomechanics of ankle joints with osteoarthritis.
105
In-vivo Cartilage
Chapter 4:
Stress-Strain Distribution of the
Human Ankle Joint
4.1 Introduction
The clinical incidence of osteoarthritis was reported to be 4.4% in the
ankle (Cushnaghan and Dieppe 1991). Abnormal mechanics and trauma were
considered as the major risk factors causing osteoarthritis in the ankle joint
(Walter and Spector 1991). Investigations into the etiology of degenerative joint
diseases demand knowledge of the deformation of the articular cartilage of the
joint, especially under the in-vivo physiological loading conditions. Extensive invitro investigations have reported on ankle articular cartilage biomechanics using
cadaveric experimental setup (Ramsey and Hamilton 1976; Wagner, Tarr et al.
1984; Tarr, Resnick et al. 1985; Ting, Tarr et al. 1987; Bruns and Rosenbach
1990; Beaudoin, Fiore et al. 1991; Calhoun, Li et al. 1994; Christensen, Driscoll
et al. 1994; Driscoll, Christensen et al. 1994; Pereira, Koval et al. 1996;
Steffensmeier, Saltzman et al. 1996; Kura, Kitaoka et al. 1998; Michelson,
Checcone et al. 2001; Corazza, Stagni et al. 2005; Anderson, Goldsworthy et al.
2006). Carbon black transference techniques have been used to determine the
contact area in the tibiotalar articulations (Ramsey and Hamilton 1976). Pressure
sensors or pressure-sensitive film have been used to determine the contact
areas and surface pressure distributions on the trochlea tali(Wagner, Tarr et al.
1984; Tarr, Resnick et al. 1985; Ting, Tarr et al. 1987; Bruns and Rosenbach
106
1990; Beaudoin, Fiore et al. 1991; Calhoun, Li et al. 1994; Christensen, Driscoll
et al. 1994; Driscoll, Christensen et al. 1994; Pereira, Koval et al. 1996;
Steffensmeier, Saltzman et al. 1996; Michelson, Checcone et al. 2001).
Kinematic tracking methods have also been used to determine ankle joint contact
areas(Kura, Kitaoka et al. 1998; Corazza, Stagni et al. 2005), such as
radiostereometric analysis (RSA) combined with 3-dimensinal (3D) surface
modeling method(Corazza, Stagni et al. 2005); magnetic tracking device
combined with proximity calculations of digitized joint surfaces(Kura, Kitaoka et al.
1998). However, no study has investigated the in-vivo articular cartilage contact
biomechanics in the ankle joint.
Hodge et al. pioneered the study of in-vivo human hip joint contact
pressure using an instrumented femoral head prosthesis(Hodge, Fijan et al. 1986;
Hodge, Carlson et al. 1989). Subsequently, with the development of various
telemetric instrumented joint implants and surgical interventions, several studies
have reported in-vivo joint contact force in the human hip(Davy, Kotzar et al.
1988), spine(Rohlmann, Bergmann et al. 1995; Wilke, Neef et al. 1999), and
knee(Lu, Taylor et al. 1997; Taylor and Walker 2001; D'Lima, Patil et al. 2006)
joints during different activities. Magnetic resonance (MR) imaging technique has
been recently used to investigate the morphology of articular cartilage in various
musculoskeletal joints of living subjects(Peterfy, van Dijke et al. 1994; Piplani,
Disler et al. 1996; Tan, Wilcox et al. 1996; Nishii, Nakanishi et al. 1998; Cicuttini,
Forbes et al. 1999; Cohen, McCarthy et al. 1999; Nakanishi, Tanaka et al. 1999;
Faber, Eckstein et al. 2001; AI-Ali, Graichen et al. 2002; Graichen, Jakob et al.
107
2003; McGibbon, Bencardino et al. 2003; Nishii, Sugano et al. 2004; Jaremko,
Cheng et al. 2006; Naish, Xanthopoulos et al. 2006). MR imaging has also been
used to evaluate the effects of various exercises on knee joint cartilage volume
and average thickness(Waterton, Solloway et al. 2000; Eckstein, Hudelmaier et
al. 2006). Besides these various advancements in articular cartilage
biomechanics, measurement of the strain distributions in articular cartilage of
living subjects still presents a challenge for contemporary biomedical engineering.
Recently, a combined dual-orthogonal fluoroscopic and MR imaging
technique has been used to investigate the 6 degrees of freedom (DOF)
kinematics and articular cartilage contact areas of human ankle joints(de Asia,
Wan et al. 2006; Wan, de Asia et al. 2006). In this chapter, we used this
technique to determine the articular cartilage contact strain and stress distribution
in the human ankle joint at a simulated mid-stance phase of walking (under the
full body weight loading condition). We hypothesized that both the tibial and talar
cartilage experience small deformation under normal functional loading
conditions. The cartilage thickness distribution of the ankle joint was specifically
reported in this chapter.
108
4.2 Methodology
4.2.1 MR Imaging and 3D Model
Six normal ankles (4 from males and 2 from females, 24 to 42 years old)
were recruited with the approval of our institutional review board (IRB). The
average body weight was 765 ± 64N. Four ankles were left and two were right.
The ankles had no history of injuries and no signs of osteoarthritis when
participating in this study.
Each ankle was scanned using a 1.5 Tesla MR scanner (GE, Milwaukee,
Wi) with a surface coil and fat suppress three-dimensional (3D) spoiled gradientrecalled (SPGR) sequence (Repetition Time = 48ms, Echo Time = 4.3ms, Flip
Angle=450 , Field of View = 16x16cm 2). The subjects rested their ankles
approximately one hour before the MR imaging. While the subject was lying
supine, the ankle joint was in the neutral position and no loading was applied to
the foot during imaging. The cubic volume enclosing the talocrural joint for MR
imaging was 16 x 16 x 10 cm3 with 16 cm in both anterior-posterior and proximaldistal directions and 10 cm in medial-lateral direction. Parallel sagittal plane
images at 1 mm intervals with a resolution of 512 x 512 pixels were acquired (Fig.
4.1(a)). The scan time was approximately 11 minutes for the entire ankle joint.
The MR images were imported into a solid modeling software package
(Rhinoceros@, Seattle, WA) and the contours of the tibia, talus, and their
cartilage surfaces were digitized using B-spline curves. Bone and cartilage
surfaces of the tibia and talus were created from the contours using polygon
109
mesh. Points on the B-spline curves were sampled as vertexes of the polygon
mesh. All the points were connected to create the polygon mesh so that the
digitization data of the cartilage surface could be included in the polygon mesh.
This method has been applied extensively in previous research(Li, Lopez et al.
2001; Li, DeFrate et al. 2005; Li, Moses et al. 2006). A typical talocrural joint
model constructed from MR images is shown in Fig. 4.1(b).
The cartilage surfaces constructed from MR images were used as
references or zero strain status of the cartilage since the ankle was scanned in a
relaxed, no load condition and the cartilage interface could be delineated within
the talocrural joint. Cartilage thickness distribution was calculated at each point
on the tibial and talar cartilage surface meshes. The thickness was determined
as the shortest distance from the point on the cartilage surface to the cartilagebony interface(Li, Park et al. 2005). The mean thicknesses of the distal tibial
cartilage and the proximal talar cartilage were averaged among all the subjects.
Repeated measurement analysis of variance (ANOVA) was used to compare the
average thickness between the distal tibial and proximal talar cartilage layers.
In order to compare the cartilage thickness among different regions, each
cartilage surface was divided into 9 regions. In the anterior-posterior direction,
the cartilage layers were evenly divided into three portions. In the medial-lateral
direction, the cartilage layers were also evenly divided into three parts. The
separation planes along the anterior-posterior and medial-lateral directions
divided the tibial and talar cartilage layers into 9 regions as depicted in Figs. 4.2
(a) and (c) (Wan, de Asia et al. 2006).
110
Distal tibial
cartilage
Proximal talar
cartilage
Y
Talus
(a)
(b)
Fig.4.1 (a) A typical sagittal plane MR image of the talocrural joint; (b)
3D bony and cartilage models of the talocrural joint.
112
(a)
t
Posterior
Central
Anterior
Lateral Central
Medial
(b)3
E 2.5
E
2
U,
V
1.5
-1
1
0.5
0
(c)
t
Anterior
Central
Posterior
Lateral Central Medial
(d)
*
2.5
E
E
V
V)
Anterior
r•-
Central
2
I1€
I··r -I
, II
II
I
T
I
DPosterior
I
T T
r-
c
I-
0.5
I~
Lateral
7,
Central
Medial
Fig. 4.2 Regional ankle cartilage thickness distribution. (a) definition
of tibial cartilage regions; (b) tibial cartilage thickness
distribution in different regions; (c) definition of talar cartilage
regions; (d) talar cartilage thickness distribution in different
regions. *p<0.05.
113
114
The cartilage thickness at the center of each region was calculated(Li,
DeFrate et al. 2005) and averaged among the different subjects. The differences
in thickness between different regions were analyzed using repeated
measurement analysis of variance (ANOVA), followed by the Student NewmanKeuls test. Statistical significance was set as P<0.05.
115
4.2.2 Dual-orthogonal Fluoroscopic System and Invivo Ankle Position
A dual-orthogonal fluoroscopic imaging system was used to measure the
in-vivo ankle joint kinematics(de Asia, Wan et al. 2006). The system was
composed of two fluoroscopes (OEC® 9800 ESP, GE, Salt Lake City), which
were positioned in such a way that the two image intensifiers were perpendicular
to each other in the horizontal plane(Hanson, Suggs et al. 2006). During the
experiment, the subject walked on a platform and ankle positions were recorded
simultaneously from anteromedial and anterolateral directions by the two
fluoroscopes (Fig. 4.3(a)). In this study, each subject was instructed to walk into
the fluoroscopic system from heel strike to toe off using the target foot. However,
in order to image the foot at mid-stance, the subject was asked to pause shortly
(- 1 second) at the mid-stance for the fluoroscopic imaging(Wan, de Asia et al.
2006) while full body weight was supported by the foot. Therefore, the ankle
positions studied in this chapter only represented a 'simulated' mid-stance phase
of walking cycle(de Asia, Wan et al. 2006; Wan, de Asia et al. 2006).
To determine the in-vivo ankle joint kinematics, the 3D talocrural joint
model and the orthogonal fluoroscopic images were imported into the solid
modeling software to create a virtual dual-orthogonal fluoroscopic system. The
orthogonal images were placed as two virtual image intensifiers while two virtual
cameras were created to reproduce the positions of the X-ray sources of the two
fluoroscopes during the image acquisition (Fig. 4.3(b)). The 3D ankle joint model
116
was then imported into the virtual space so that the virtual cameras projected the
joint model onto the corresponding virtual image intensifiers (Fig. 4.3(b)). The
positions of the tibial and talus models were adjusted individually in 6DOF until
their projections matched the contours of the actual ankle joint on the two
fluoroscopic images concurrently (Fig. 4.3(b)). The 3D talocrural joint model then
reproduced the in-vivo ankle position recorded by the dual-orthogonal
fluoroscopic imaging system.
The accuracy of the above procedure in reproducing joint kinematics has
been reported in various studies (Li, Wuerz et al. 2004; Bingham and Li 2006;
Defrate, Papannagari et al. 2006; Hanson, Suggs et al. 2006; Wan, de Asia et al.
2006). In a study of human knee joints, the accuracy of this procedure was
reported to be within 0.1 mm in translation and 0.3Oin rotation in determination of
knee joint position in space (Defrate, Papannagari et al. 2006). Further, as an
overall validation of the procedure, the accuracy for measurement of ankle
cartilage contact area was performed using a cadaveric ankle specimen (Wan,
de Asia et al. 2006), where a 3.4% difference in contact area was measured
between the above procedure and the silicone casting measurement technique.
In a cadaveric ankle experiment, the ankle compressive kinematics was
compared to those measured using a traditional RSA method using spherical
beads(Li, Wan et al. 2007). This comparison demonstrated that the ankle
kinematics was determined within a difference of 0.05 ± 0.01 mm (range
0.04-0.06 mm) compared to that measured using the RSA method when the
ankle was subjected up to a -800N load.
117
4.2.3 Determination of In-vivo Cartilage Contact Strain
Distribution
Once the ankle joint position was determined, the relative positions of the
cartilage layers of the tibia and the talus were also decided. The two cartilage
surfaces would overlap each other at the area with cartilage contact between the
tibia and talus(Wan, de Asia et al. 2006). The contact deformation of the cartilage
was defined as the depth of the overlapping area of the tibial and talar cartilage
layers. The depth of cartilage overlapping was calculated using the same
algorithm as for the cartilage thickness distribution, i.e., the shortest distance of a
point on one surface to the opposite overlapping surface at the contact area. The
compressive contact strain was defined as the cartilage penetration divided by
the thickness of the two cartilage layers. Therefore, the strain determined in this
chapter combined the deformation of both the tibial and talar cartilage layers. The
peak contact strain and the average contact strain were calculated for each
subject once the compressive contact strain distribution was obtained.
118
(a)
rluuroscope z
(b)
Fig.4.3 (a) Experimental setup using the dual-orthogonal fluoroscopic system to
capture the in-vivo ankle joint position. (b) The virtual dual-orthogonal
fluoroscopic system created to reproduce the actual experimental setup.
The 3D ankle models can be manipulated in 6 DOF so that their
projections match the actual ankle images on the two virtual image
intensifiers.
119
120
4.3 Result
4.3.1 Cartilage Thickness Distribution
The cartilage thickness distribution of one typical subject is shown in Figs.
4.4(a) and 4.4(b). The mean thickness of the distal tibial cartilage layers was 1.43
± 0.15 mm. The mean thickness of the proximal talar cartilage layers was 1.42 ±
0.18 mm. There was no statistically significant difference between the
thicknesses of the distal tibial and proximal talar cartilage layers.
Table 4.1 includes the average cartilage coverage areas of the 9 regions
of the tibial and talar cartilage surfaces. The average regional ankle cartilage
thickness is shown in Fig. 4.2. For the distal tibial cartilage layer, no statistically
significant difference was detected among the different regions of cartilage in this
group of subjects. In the lateral portion, the thickness of the anterior region was
1.45 ± 0.18 mm, the central region was 1.45 ± 0.24 mm, and the posterior region
was 1.46 ± 0.32 mm (Figs. 4.2(a) and 4.2(b)). Inthe central portion, the thickness
of the anterior region was 1.35 ± 0.34 mm, the central region was 1.37 ± 0.17
mm, and the posterior region was 1.42 ± 0.22 mm. In the medial portion of the
distal tibial cartilage layer, the thickness of the anterior region was 1.46 ± 0.26
mm, the central region was 1.40 ± 0.25 mm, and the posterior region was 1.54 +
0.24 mm.
For the proximal talar cartilage layer, the posterior-lateral region (1.64 ±
0.21 mm) was significantly thicker than the anterior-lateral (1.17 ± 0.18mm)
121
(p=0.002), central-lateral (1.22 ± 0.21 mm) (p=0.0006), and anterior-central (1.32
± 0.23 mm) (p=0.04) regions (Figs. 4.2(c) and 4.2(d)). The posterior-medial
region (1.56 ± 0.34 mm) was also significantly thicker than the anterior-lateral
(p=0.007) and central-lateral regions (p=0.02). The thicknesses of the centraland posterior-central regions were 1.39 ± 0.36 mm and 1.41 ± 0.31 mm,
respectively. The thicknesses of the anterior- and central-medial regions were
1.38 ± 0.32 mm and 1.42 ± 0.31 mm, respectively.
Posterior
80.4±8.8
122.4±16.6
131.6+25.0
108.9±20.4
98.7±19.6
116.0±30.1
114.0±18.0
124.5+18.9
130.1±23.8
Anterior
Lateral
(b)
144.6±34.1
137.4±23.3
109.9±34.6
159.6±15.0
140.9±24.7
170.3±24.6
Medial
182.1+35.6
149.0±15.5
161.8+11.8
Posterior
Table 4.1 (a) average cartilage coverage areas (mm2) of the 9 regions of the
tibial cartilage; (b) average cartilage coverage areas (mm2) of the 9
regions of the talar cartilage.
122
A9
A
R
0%
1%
3 C 1
1 IIIII
(a)
Lateral
Anterior
Medial
(b)
Posterior
Fig. 4.4 (a)Tibial cartilage thickness distribution of one typical subject;
(b) talar cartilage thickness distribution of the same subject.
123
124
(b)
30%
D
25
25
20
15
62
S515
S
10
5
5
0
0
N
~L___.__.~_~
-5
L
0
A
5
D12an(me
(d)
35
35
30
30
25
251
20
20
15
15
10
101
5]
5
0
5
L
0
5
10
15
Distance (mm)
20
25
30
-5
M
AL
0
5
10
15
20
25
Distance (mm)
Fig. 4.5 (a) Strain distribution on the talar cartilage surface of one
typical subject and (b) strain distribution along cross-section
line "b", (c) along cross-section line "c" and (d) along crosssection line "d". "0" on x-axis corresponds to the location of
the peak strain.
125
126
4.3.2 In-vivo Cartilage Strain Distribution
Under the full body weight, the cartilage contact strain distribution was not
homogeneous as shown in Fig. 4.5(a) for a typical subject. Cartilage contact area
covered from lateral to medial regions of the joint surface. The average cartilage
contact strain over the entire cartilage area was 7.46 ± 0.74%. The peak contact
strain was seen to occur at the lateral side of the joint for all the subjects. The
peak contact strain of the six subjects was 34.5 ± 7.3% under the full body weight
loading.
The compressive strain continuously varied in the contact regions (Fig. 4.5(a)).
The strain distributions along three cross-sections of the cartilage of the same
subject are shown in Figs. 4.5(b)-(d), which represent different strain gradients at
the edge of the contact area. On average, 42.4 ± 15.7% of the contact area has
contact strain level larger than 15% (Armstrong, Bahrani et al. 1979).
127
4.3.3 Accuracy of Cartilage Thickness Measurement
An accuracy study on the cartilage thickness constructed using MR
images was conducted using a cadaveric ankle specimen. The first step was to
acquire MR images of the intact ankle specimen using the protocol described in
the Materials and Method Section. The specimen was then disarticulated and the
talus was cut into two pieces in coronal plane using a band saw (Fig. 4.6a). A
digital image of the cross section was captured, calibrated, and used to measure
the cartilage thickness in this cross section (Fig. 4.7a). A 3D model of the ankle
joint was constructed using the MR images, including both bony surfaces and
cartilage boundaries (Fig. 4.6b). Since the actual cartilage boundaries can be
clearly delineated from the specimen, this study used the digital image as a gold
standard to validate the cartilage thickness constructed from MR images. The
next step was to determine the same cross section of the talus cartilage in the
MR image model. To do this, one piece of the talus was CT scanned. The bony
model of the piece of the talus was constructed using a threshold algorithm
implemented in the Matlab software. The partial bony model was then mapped to
the MR image model of the talus.
A plane was constructed along the cutting cross section of the CT bony
model. This plane was used to separate the MR image model (Fig. 4.6b). The
cartilage model on this plane (Fig. 4.7B) was compared to the actual cartilage
captured on the digital image (Fig. 4.7A). To quantify this comparison, cartilage
thickness was measured at 10 locations of the cartilage along the cross section
(Table 4.2). The thickness of the actual specimen measured from the digital
128
image was 1.81 ± 0.11 mm and the MR image cartilage thickness was 1.77 ±
0.17 mm. The MR image model of the talus cartilage was, on average, 0.04 ±
0.07 mm thinner than the actual image (range: -0.04-0.13mm) (p<0.05).
On average the MR image based cartilage was about 2.4 ± 4% thinner
compared to that captured from the actual specimen. The above comparison
demonstrated that the MR image based cartilage model is close to the actual
cartilage.
Location
1
Digital
2.021
2
1.732
3
1.745
4
1.714
5
1.694
6
1.794
7
8
9
10
1.828
1.78
1.835
2.002
1.622
1.72
1.704
1.641
1.693
1.775
1.673
1.704
2.105
1.77
0.17101
0.11
0.025
0.01
0.053
0.101
0.053
0.107
0.131
-0.103
0.0445
0.0744
picture
model
2.063
Difference -0.042
Mean
SD
1.8145 0.11366
Table 4.2 Cartilage thickness (mm) measured at different locations on the talus
surface. The thickness was measured using the digital picture of the
actual specimen and the 3D MR image model. The differences
between the two methods were also calculated
129
4.3.4 Precision of Cartilage Thickness Measurement
The variation of the constructed 3D cartilage surfaces caused by MR
image digitization was examined by delineating the boundaries of cartilage from
the same set of MR images ten times. Five evenly distributed locations on the
arch of cartilage were selected to investigate the digitization variation. At each
location, a line normal to the cartilage layer was drawn (Fig. 4.8). Each digitized
contour intersected this line. The average of all the intersection points on the
normal line and the standard deviation (SD) of the distances from all intersection
points to the corresponding average points were calculated (Fig. 4.8). The
variation was represented by the standard deviation, which was 0.04 mm. Since
the cartilage thickness in this chapter was determined by two digitized surfaces
(cartilage surface and cartilage-bone interface), the precision of 0.08 mm or 5.6
% for the mean cartilage thickness was obtained, which is similar to 3.7%-10.9%
reported by Al-Ali et al. (AI-Ali, Graichen et al. 2002) and 8% by Li et al. (Li,
Lopez et al. 2001).
130
(a)
(b)
Fig. 4.6 (a) Cadaveric talus specimen cut by a band saw; (b)
MRI model of the cadaveric talus with the cutting plane.
131
132
(a)
(b)
Fig. 4.7 (a) Cross section of the cadaveric talus; (b) cross section of
the MRI model of the cadaveric talus. The cartilage
thickness measured from the above two cross sections were
compared
133
134
SI
(a)
I'lJII1
L..II
Iu
i "%VuIl
v
i
-i LI-t
(b)
Fig.4.8 (a) Ten times digitization of cartilage surface; (b) a close look
of one location of the cartilage surface (only five digitization
are shown). Note the definition of the normal line,
intersections and average intersection point.
135
136
4.4 Discussion
This chapter experimentally determined the articular cartilage thickness
distribution and contact strain distribution in human ankle joints at a simulated
mid-stance phase of walking using a combined dual-orthogonal fluoroscopic and
MR imaging technique. The articular cartilage contact strain was calculated
based on the penetration of the distal tibial and proximal talar cartilage layers and
the thicknesses of the two cartilage layers.
Ankle cartilage thickness has been reported in various studies(Adam,
Eckstein et al. 1998; Shepherd and Seedhom 1999; AI-Ali, Graichen et al. 2002).
Adam et al. measured the cartilage thickness in human cadaveric ankle
specimens using an A-mode ultrasound(Adam, Eckstein et al. 1998). They
reported the mean thickness of the ankle cartilage layers to be 1.0 + 0.16 mm.
AI-Ali et al. studied the cartilage thickness distribution in living human ankles
using a water-excitation MR technique and reported the average thickness of
0.82 ± 0.15 mm for the distal tibial cartilage layer and 0.89 ± 0.19 mm for the
proximal talar cartilage layer(Al-Ali, Graichen et al. 2002). Using a needle probe
technique, Shepherd and Seedom(Shepherd and Seedhom 1999) reported that
the mean cartilage thickness of the ankle was in the range of 1.0 to 1.62 mm.
In this chapter, the mean cartilage thickness was calculated using the 3D
cartilage models of each subject. The mean thickness of the distal tibial cartilage
layer for all the subjects was 1.43 ± 0.15 mm and the mean thickness of the
proximal talar cartilage layer was 1.42 ± 0.18 mm. Cartilage thicknesses were
137
similar between the tibia and talus. Furthermore, the cartilage thickness was
more homogeneous in the distal tibial layer than the proximal talar layer.
Our thickness data is slightly greater than those of AI-Ali et al. and Adam
et al. (Adam, Eckstein et al. 1998; AI-Ali, Graichen et al. 2002), which might be
caused by the different methodologies used in these studies for the
measurements of cartilage thickness as well as the variance among subjects. In
our study, we manually examined and digitized every image of the ankle joints
and constructed 3D models of the cartilage layers. In Section 4.3.3, we validated
the accuracy for the measurement of the cartilage thickness from the MR images.
On average, the cartilage thickness of one layer was 0.04 ± 0.07 mm (range: 0.04-0.13mm) less than that obtained from a direct measurement. The precision
of digitizing the cartilage surfaces was presented in Section 4.3.4. These result
showed that the cartilage thickness could be accurately measured from MR
images. Our data also lend credence to those physically measured by Shepherd
et al.(Shepherd and Seedhom 1999) and Athanasiou et al.(Athanasiou,
Niederauer et al. 1995) using needle probes.
The 3D compressive contact strain distribution within the ankle joint was
determined under full body weight in this chapter. The mean of the average
cartilage contact strain of the entire contact area was only 7.5%. However, the
mean peak contact strain reached 34.5% for these subjects. The cartilage
contact strain measurement can be affected by the measurement of both the
cartilage thickness and the kinematics of the joint. The cartilage contact
compression error could be estimated by adding the kinematics (average
138
accuracy error 0.05 mm) and cartilage thickness (average error of 0.08 mm)
together, which would cause about ±4% difference in the contact strain
measurement. Under this consideration, the mean peak contact strain would be
in the range of 30 to 38%.
The difference between the peak cartilage contact strain and mean
cartilage contact strain indicates that the in-vivo cartilage deformation was not
homogeneous in the ankle joint, despite the fact that the ankle joint has been
considered to be a relatively congruent and homogeneous joint in terms of the
cartilage thickness distribution, which was also demonstrated in this work. This
reveals that certain areas of the articular cartilage in the ankle joint might
experience large deformations during daily activities (Fig. 4.5). In this chapter,
42.4 ± 15.7 % of the contact area experienced a contact strain larger than 15%.
These data disapproved of our hypothesis that cartilage would undergo small
deformation under normal functional loads.
Armstrong and co-workers(Armstrong, Bahrani et al. 1979) observed that
the cartilage in a cadaveric femoral head could deform by almost 14% under a
load of five times body weight within 2400 seconds. Herberhold et al.(Herberhold,
Stammberger et al. 1998) investigated the cartilage deformation of patellofemoral
joint in situ using MR imaging and reported that under a 150% body weight,
analysis of the central 2D slice revealed a mean reduction of 44 ± 15% of the
initial thickness in the patella and 30 ± 10% in the femoral trocheal after 3.5
hours of static loading. It should be noted that most in-vivo MR studies of
cartilage deformation have focused on knee joint cartilage. MR imaging
139
technique has also been extensively applied to study the in-vivo residual
deformation of joint cartilage after various activities(Waterton, Solloway et al.
2000; Eckstein, Hudelmaier et al. 2006). Most of these studies have focused on
measurements of cartilage volume or overall average thickness change after a
specific exercise regimen(Eckstein, Hudelmaier et al. 2006). These studies
represented the long term responses of the cartilage to an applied loading history.
For example, a residual reduction of 2.4-8.6% (mean 6.0%) in cartilage volume in
the patella cartilage after 50 knee bending has been reported(Eckstein, Tieschky
et al. 1998).
It is difficult to quantitatively compare our data with those reported in
literature. MR imaging in general takes minutes to scan the joint. It does not
capture the real time responses of the cartilage to the applied loads. Most of
these studies did not report local cartilage responses. The data reported in this
chapter included the contact strain distributions in the ankle joint cartilage
measured under a full body weight loading condition. The cartilage response was
captured simultaneously as the loading was applied. Therefore, the data
represented in-vivo cartilage contact deformation at each point along the
cartilage surfaces. This data showed that large cartilage deformation could be
reached during daily activities.
It is interesting to notice that the peak contact strain occurred at the lateral
side of the ankle joint (Fig. 4.5(a)). This might be attributed to the kinematics of
the ankle joint in order to keep body balance under full body weight (de Asia,
Wan et al. 2006; Wan, de Asia et al. 2006). An eversion ankle position might shift
140
the in-vivo talocrural joint contact more laterally(Wan, de Asia et al. 2006). Under
the loading condition considered in this chapter, we did not find a correlation
between the peak contact strain location and the thicker cartilage areas as
noticed in the knee joint (Li, Park et al. 2005). This may be due to the relatively
even cartilage thickness distribution and the conforming nature of the ankle joint.
These data only represent the cartilage deformation under one loading condition.
Investigation of the ankle joint response to various functional loading conditions
may be necessary to draw a more general conclusion.
In a recent in-vivo experiment of creep deformation of the ankle joint, it
was found that the talocrural joint reached - 24-38% peak strain at first 20
seconds after loading the joint to full body weight (Li, Wan et al. 2007). This study
measured 34% peak strain at the simulated stance phase of gait. This
phenomenon indicated that the joint experiences large residual contact
deformation during daily function. It is therefore important to determine
deformation history of the joint during the entire functional activity.
One limitation of the current study needs to be discussed. The cartilage
contact strain was defined as the cartilage penetration (overlapping) divided by
the thickness of the two cartilage layers. The cartilage strains from the talar and
tibial sides of the joint were not separated. This definition does not provide 3D
strain distributions inside the tibial and talar cartilage layers and may cause
inaccuracy in strain distribution at the edge of the contact area (Wan, de Asia et
al. 2006). In order to improve the accuracy of the in-vivo cartilage contact strain
measurements, a 3D finite element calculation, which incorporates the biphasic
141
material properties of the cartilage, should be carried out. This finite element
calculation can use the cartilage overlapping as a displacement boundary
condition to calculate in-vivo cartilage contact stresses. Another limitation of the
current study is that only a "simulated" mid-stance phase of walking was
investigated. Cartilage response to various in-vivo loading conditions, such as
entire gait cycle, stair climbing, running, etc., should be measured in order to
quantify the dynamic cartilage deformation history.
In conclusion, this chapter has experimentally determined the in-vivo
cartilage thickness distribution and articular cartilage contact strain distribution in
human ankle joints under a physiological loading condition. The cartilage
thickness was found to be similar between the distal tibial and proximal talar
cartilage layers. The data revealed that the cartilage experienced large
deformation under the full body weight loading in living subjects. This data could
provide quantitative guidelines for the design of loading conditions in ex-vivo
cartilage biomechanics experiments to simulate an in-vivo biomechanical
environment. Inthe future, biphasic finite element modeling should be carried out
using the actual in-vivo cartilage contact deformation determined in this chapter
as displacement boundary conditions to calculate the in-vivo 3D articular
cartilage contact stress/strain distributions in human ankle joints under
physiological loading conditions.
142
Chapter 5: In-vivo Creep Test of
Human Ankle Joint
5.1 Introduction
Knowledge of in-vivo articular cartilage contact deformation is critical for
understanding normal cartilage function and the etiology of osteoarthritis
(Buckwalter, Mankin et al. 2005; Vignon, Valat et al. 2006). This knowledge is
also instrumental for design of ex-vivo experiment to investigate the chondrocyte
mechanotransductions under physiological loading conditions (Frank and
Grodzinsky 1987; Frank and Grodzinsky 1987; Salter, Millward-Sadler et al. 2002;
Szafranski, Grodzinsky et al. 2004). Further, in-vivo cartilage contact data is
necessary for validation of 3D computational models used to predict intrinsic
biomechanical responses of the articular joints (Ateshian, Lai et al. 1994; Donzelli,
Gallo et al. 2004; Wu and Herzog 2006).
In literature, numerous studies have used magnetic resonance (MR)
imaging technique to investigate the morphology of articular cartilage in various
musculoskeletal joints (Stammberger, Eckstein et al. 1999; Potter and Foo 2006).
Early studies have focused on measurements of the articular surface shapes,
cartilage volume as well as thickness in the knee (Peterfy, van Dijke et al. 1994;
Piplani, Disler et al. 1996; Cicuttini, Forbes et al. 1999; Cohen, McCarthy et al.
1999; Faber, Eckstein et al. 2001; Jaremko, Cheng et al. 2006), ankle (Tan,
Wilcox et al. 1996; Al-Ali, Graichen et al. 2002), shoulder (Graichen, Jakob et al.
143
2003) and hip (McGibbon, Dupuy et al. 1998; Nishii, Nakanishi et al. 1998;
Nakanishi, Tanaka et al. 1999; McGibbon, Bencardino et al. 2003; Nishii, Sugano
et al. 2004; Naish, Xanthopoulos et al. 2006). Cartilage response to various
loading conditions has also attracted increasing attention in order to understand
injury mechanism as well as functional adaptation of the cartilage (Brommer,
Brama et al. 2005; Plochocki, Riscigno et al. 2006). Most of the in-vitro studies
subjected the joint to a designed loading history and then subjected the joint to
MR imaging to examine the loading effect on cartilage volume and thickness
(Rubenstein, Kim et al. 1996; Herberhold, Faber et al. 1999). A recent in-vivo
study has also attempted to correlate the cartilage thickness distribution to
articular contact kinematics in human knee joints (Li, Park et al. 2005). However,
due to the complexity of in-vivo joint loading conditions as well as the
complicated joint geometry, little information is available on in-vivo cartilage
deformation in literature (Wan, de Asia et al. 2006). In-vivo cartilage deformation
as a function of loading history has not been delineated.
Therefore, the objective of this chapter was to investigate real time in-vivo
cartilage contact deformation of human ankle joint under physiological loading
conditions using a combined dual-orthogonal fluoroscopic and MR imaging
technique that was recently developed in our laboratory (Li, Wuerz et al. 2004; de
Asia, Wan et al. 2006; Wan, de Asia et al. 2006). This imaging technique has
been shown to be accurate in determination of 6DOF kinematics and contact
areas of human knee and ankle joints (de Asia, Wan et al. 2006; Defrate,
Papannagari et al. 2006; Wan, de Asia et al. 2006). In this chapter, the in-vivo
144
articular cartilage contact deformation of human ankle joint was determined as a
function of time along the loading history. The cartilage contact area and peak
contact compressive strain were determined at different time intervals after the
ankle joint was loaded.
145
5.2 Methodology
The combined dual-orthogonal fluoroscopic and MR imaging technique (Li,
Wuerz et al. 2004; Bingham and Li 2006) was used in this chapter to determine
the continuous deformation of articular cartilage of human ankle joints under a
constant load. Four ankles from health living subjects (male, 32-42 years old)
were recruited for this study. Prior to participation, the subjects were informed
and signed a consent form approved by MGH institutional review board. All
ankles were screened for a negative history of injury and osteoarthritis using
physical examination, radiography and MRI.
5.2.1 MR Scan and 3D Ankle Model
The first step of the study was to obtain 3D MR images of the ankles in
order to construct 3D anatomic models of the ankle joints (Li, Gil et al. 1999; Li,
Lopez et al. 2001; DeFrate, Sun et al. 2004). Each ankle was scanned with the
ankle in a relaxed, neutral position. The MR images were acquired by a 1.5 Tesla
scanner (GE, Milwaukee, WI) with a surface coil and three-dimensional spoiled
gradient-recalled (3D SPGR) sequence. The MR image spanned the medial and
lateral extremes of the ankle, enclosing a cubic viewing volume of approximately
16 cm on each side. It consisted of parallel digital images separated at 1.0 mm
intervals with a resolution of 512 x 512 pixels. This process has been used
extensively in our previous studies (DeFrate, Sun et al. 2004; Li, DeFrate et al.
2005b; Li, Defrate et al. 2005a). A typical ankle image is shown in Fig. 5.1a.
146
Distal tibial
cartilage
3roximal
talar
cartilage
Talus
Fig. 5.1 (a) A typical sagittal plane MR image of the ankle joint; (b)
the 3D ankle joint model constructed using the 3D MR
images of the ankle joint.
147
148
The images of each ankle were imported into a solid modeling software
(Rhinoceros@, Robert McNeel & Associates, Seattle, WA) to construct a 3D
anatomical model of the ankle using a protocol established in our laboratory
(DeFrate, Sun et al. 2004; Li, DeFrate et al. 2005; Li, Defrate et al. 2005). The
contours of the tibia, talus and their articular cartilage surfaces were digitized
within each image. The digitized spatial data (x, y, z coordinates) were then
linked using B-Spline curves to reproduce the contours of the tibia, talus as well
as their cartilage surfaces. Polygon mesh surfaces were then created using the
contour lines to construct geometric models of the tibia, talus and the cartilage
layers. A typical 3D ankle joint model with cartilage coverage is shown in Fig.
5.1B.
149
5.2.2 Dual-orthogonal Fluoroscopic Imaging
A dual fluoroscope system was formulated using two fluoroscopes (BV
Pulsera@, Philips, Netherlands), which were positioned to record two orthogonal
images of the ankle simultaneously (Fig. 5.2), enclosing a cubic imaging space of
approximately 30cm x 30cm x 30cm. The fluoroscope offered a real-time 1K x 1K
imaging resolution. A force plate constructed using a 6 DOF load cell (JR3 Inc,
Woodland, CA) was incorporated into the fluoroscopic system to measure ground
reaction forces during experiment (Fig. 5.2). The load cell had a resolution of 0.5
N and collects data at a rate of 500 Hz. The load measured from the load cell
could be simultaneously shown on a monitor that was installed in front of the
fluoroscopic system.
150
Fig. 5.2 Experimental setup using the dual-orthogonal fluoroscopic
system to capture the in-vivo ankle joint position.
151
152
5.2.3 Ankle Imaging under In-vivo Loading Conditions
Before the experiment, the subject sat closely to the testing platform for 60 minutes with target ankle in a relaxed, non-weightbearing position. The
subject then positioned the ankle within the common imaging zone of the two
fluoroscopes. The foot only slightly touched on the force plate initially. When the
force plate started to measure a load of less than 5N, the ankle position was
imaged simultaneously by the dual fluoroscopes to represent the nonweightbearing condition of the ankle. The subject then quickly applied the
designed load to the foot. In this experiment, the 4 ankles were loaded using
different target loads, the first - 820N, the second - 700, the third - 800N and
the fourth - 780N, which were monitored by the force plate. In all experiment, the
target load was controlled within +1ON around the target load.
The foot under body weight was imaged within 1 second after being
loaded. While a constant ground reaction force was maintained, the ankle was
imaged in every 2 seconds for 5 times and followed by every 10 second for 5
times. Thereafter, the ankle joint was imaged at every 60 seconds until the
subject felt difficult to maintain the ankle joint stability.
153
5.2.4 In-vivo Ankle Joint Kinematics Using Image
Matching
The orthogonal images acquired above and the 3D ankle models were
used to create a "virtual" fluoroscopic system in the Rhinoceros@ software (Li,
Wuerz et al. 2004). A pair of acquired orthogonal images was input into the
software to recreate two virtual image intensifiers, and two virtual cameras were
created to represent the x-ray sources of the fluoroscopes (Fig. 5.3), based on
the geometry of the dual fluoroscopes. The two virtual cameras enabled 3D
objects created within the software to be viewed from the two orthogonal
directions and projected onto the corresponding virtual image planes. The
software allows for the adjustment of the positions of the model in 6DOF,
including translations (inincrements of less than 0.01 mm) along and rotations (in
increments of less than 0.010) about the three axes of the coordinate system of
the virtual space (Li, Wuerz et al. 2004). After both the tibia and talus models are
matched to the orthogonal images, the in-vivo ankle position was then
reproduced by the 3D ankle model. The ankle positions at different time intervals
were then reproduced in the same way by a series of 3D ankle models.
154
)I
Fig. 5.3 The virtual dual-orthogonal fluoroscopic system created to
reproduce the actual experimental setup. The 3D ankle
models can be manipulated in 6 DOF so that their
projections match the actual ankle images on the two virtual
image intensifiers.
155
156
The accuracy of the imaging method in reproducing joint kinematics has been
validated extensively in previous studies (DeFrate, Sun et al. 2004; Li, Wuerz et
al. 2004; Li, DeFrate et al. 2005; Li, Defrate et al. 2005). Using standard
geometries, the system has an accuracy of 0.1 mm in position and 0.10 in
orientation in reproducing the position and orientation of the subject in space.
Recently, a validation using a cadaveric ankle specimen demonstrated that the
system has an accuracy of smaller than 3%in determination of articular cartilage
contact area (Wan, de Asia et al. 2006).
157
5.2.5 In-vivo Cartilage Contact Deformation
After reproducing the in-vivo positions of the ankle at each time point, the
relative positions of the cartilage layers of the tibia and talus were also
determined. If there is cartilage contact, the cartilage layers will overlap each
other (Fig. 5.4). In this chapter, the contact area was defined as the area of
overlapping of the two cartilage layers (Wan, de Asia et al. 2006). The contact
deformation was calculated as the depth of the overlapping area. The peak
contact deformation was defined as the maximal penetration of the two cartilage
surfaces (Fig. 5.4). Compressive peak contact strain was defined by dividing the
peak contact deformation (maximal penetration) by the cartilage thickness at the
peak contact deformation location. Inthis chapter, the cartilage contact area and
compressive peak contact strain as functions of time were measured from the
series of ankle joint models. The cartilage deformation rate was calculated as the
changing rates of contact area and compressive contact strain with time.
158
Tibia
00
Cartilage
Contact
Cartilage Contact
Talus
Fig. 5.4 Cartilage contact was defined as overlapping of the counter
cartilage surfaces.
159
160
5.3 Result
Since loading levels were different among the tested ankles, we presented
the data of cartilage contact deformation for each individual ankle in Table 5.1
and graphically plotted the average data of all Ankles in Figs. 5.5, 5.6 and 5.7 as
an illustration. All ankles were able to sustain the target loading for about 5
minutes. Therefore, we reported in-vivo ankle contact data of all ankles from the
first second after loading to 5 minutes (300 seconds) after loading.
Time (sec) Ankle 1
1 99.5
5 114.8
10 160.4
15 199.5
20 276.6
25 339.2
30 361.8
40 275.2
50 376.9
100 380.5
150 383.1
200 384.9
250 384.7
300 384.6
Time (sec)
1
5
10
15
20
25
30
40
50
100
150
200
250
300
Contact area (mm*mm)
Ankle 2 Ankle 3 Ankle 4
77.4
332.8
91
125.9
365.5
150.5
189.1
359.6
208.2
228.1
375.8
267.9
234.8
384.2
299.3
238.1
405.3
304.5
238.5
416.8
277.8
246.8
451
319.1
257.8
468.2
324.1
267.5
477.5
329.5
274.5
477.1
331.4
274.9
479.9
343.7
277.7
484.8
353.1
280.8
484.4
359
Rate of contact area change
(mm*mmlsec)
Ankle 1 Ankle 2 Ankle 3
99.5
79.4
332.8
25.5
23.1
2.5
9.2
7.8
2.5
11.6
4.6
2.1
11.3
1
2.6
8.8
0.1
3.4
3.8
3
0.9
0.9
3.1
0.8
0.8
0.6
1.3
0.48
0.22
0.38
0.152
0.09
0.16
0.04
0.051
0.035
0.02
0.044
0.051
0.001
0.05
0.025
Ankle 4
91.0
26.1
11.2
10.9
3
0.9
0.9
0.9
0.5
0.04
0.145
0.18
0.2
0.2001
Contact strain (%)
Ankle 2 Ankle 3
13.1
24.7
17.9
26.8
23.1
27.5
24.2
28.1
25.8
27
27
30.9
25.8
33.3
27.3
38.8
28.9
40.1
29.3
41.3
27.9
40.2
40.1
27
26.9
40.9
27.2
40
Ankle 4
14.9
16.1
19.2
19.1
20.7
20.6
23.1
23.2
22.3
21.9
27
23.6
22.3
22.9
Rate of contact strain change
(%Isec)
Ankle 1 Ankle 2 Ankle 3
22.3
13.0
24.72
4.8
3.45
0.29
1.001
1.18
0.035
0.39
0.635
-0.09
0.04
0.34
0.06
-0.03
0.318
0.63
0.005
0.308
0.615
0.062
0.163
0.449
0.059
0.062
0.164
0.035
0.012
0.108
0.0108
0.017
0.035
0.0018
-0.0108
-0.008
0.004
-0.0135
0.003
0.008
-0.0078
0.002
Ankle 4
14.9
2.9
0.125
0.745
0.057
-0.08
0.14
-0.013
0.017
0.01
0.0109
-0.054
-0.076
-0.0801
Ankle 1
22.3
26.6
33.2
36.7
37.1
36.6
36.1
37
37.1
37.2
37.3
37.6
38.1
38.6
Table 5.1 Data of contact area and contact strain as well as their change rates
as a function of time under target loading conditions.
161
5.3.1 Cartilage Deformation with Time
Cartilage contact area and peak compressive contact strain of the ankles
vary with time (Figs. 5.5, 5.6 and Table 5.1). Contact areas were similarly located
at the anterior-lateral portion of the tibial cartilage surface in all the ankles. The
contact area in each ankle does not change location dramatically during the
loading history in this study.
In first second, a contact area of 150.2 ± 122.1 mm2 was measured at the
ankles (Fig. 5.5A). At 10 seconds after loading, the cartilage contact area sharply
increased to 229.3 ± 89.0 mm2, representing a 53% increase in magnitude
compared to that measured at the first second. At 15 seconds after loading, the
contact area continued to increase to 267.8 ± 77.3 mm2 (a 78% increase). The
contact area further increased to 323.7 ± 80.6 mm2 at 30 seconds, a 116%
increase compared to that measured at the first second of loading. Thereafter,
the contact area was rather constant. At 300 seconds, the contact area was
measured to be 377.2 ± 84.0 mm2, a 151% increase.
The peak contact compressive strain was 18.8 ± 5.6% at the first second
after loading (Fig. 5.5B). At 10 seconds after loading, the peak contact strain
increased to 25.8 ± 6.0%, a 37% increase from that measured at the first second.
The peak contact strain was measured to be 27.0 ± 7.4% at 15 seconds after
loading. Beyond this time point, the peak contact penetration was relative
constant. At 300 seconds, the peak contact penetration was measured to be 32.2
± 8.4%.
162
Tibial Cartilage
Anterior
I~
ICJ
Q)
I.J
I
Posterior
Time
(seconds)
(seconds)
1
10
20
300
Fig. 5.5 Compressive cartilage contact deformation distributions of
Ankle 1 were plotted on the tibial cartilage surface at
different time intervals after loading.
163
164
DUU
400
N
300
E
E
200
S100
100
-100
-200
Time (second)
b)
40
30
20
0. 10
0
-In
Time (second)
Fig. 5.6 (a) Average cartilage contact areas and (b) peak contact
compressive strain of the ankles change with time after
loading.
165
166
20,,V
15
100
0o
- --
HI
b
~
1
I
~rrr
Ak
Ak
A&
AL
A.r
50
100
150
200
250
200
250
I
r
-5
-100
0
-15
Time (second)
b
2D
20
4
I
t
01
I
6
50
100
150
J
3'
L
Time (second)
Fig. 5.7 The changing rates of (a) cartilage contact area and (b) peak
contact compressive strain of the ankles.
167
168
5.3.2 Deformation Rate
Cartilage contact deformation rate, represented by the variation rates of
contact area and peak compressive contact strain with time in this chapter,
increased dramatically at early time after loading (Fig. 5.7 and Table 5.1). The
increasing rate of contact areas was 150.7 ± 121.2 mm2/second at first second
after loading. The increasing rate then quickly decreased to 7.7 ± 3.7
mm2/second at 10 seconds after loading. Beyond about 50 seconds, the
changing rate of contact area was almost zero. At 300 seconds, the changing
rate of the contact area was 0.07 ± 0.09 mm2/second.
The increasing rate of peak contact strain was 18.7 ± 5.7%/second at the
first second after loading (Fig. 5.7). The increasing rates of the peak contact
compressive strain also quickly dropped to 0.6 ± 0.6%/second at 10 seconds
after loading. Beyond 50 seconds, the changing rate of the compressive strain
was reduced to less than 0.1%/second. At 300 seconds, the changing rate of the
compressive strain was 0.0 ± 0.04%/second.
169
5.4 Discussion
This chapter investigated the real time deformation of articular cartilage of
human ankle joints using a combined dual-orthogonal fluoroscopic and MR
imaging technique (Li, Wuerz et al. 2004; Bingham and Li 2006). The MR
imaging was used to construct 3D anatomic models of the ankle joint and the
corresponding cartilage surfaces, and the dual-orthogonal fluoroscopes were
used to capture images of the ankle joint at real time during weight bearing
standing of the ankle (de Asia, Wan et al. 2006; Defrate, Papannagari et al. 2006;
Wan, de Asia et al. 2006). The in-vivo position of the ankle was recorded at
about 1 second after loading and at different time intervals until the subject could
not hold stable of the joints. In this experiment, all ankles were able to be kept in
position under the target load for more than 300 seconds. In-vivo ankle positions
with time were reproduced using the 3D ankle joint model and the captured
fluoroscopic images. The series of ankle joint models that reproduced the in-vivo
joint positions at different time intervals under the controlled loading conditions
were used to calculate the in-vivo cartilage deformation response as a function of
time.
The cartilage deformation, which was represented using cartilage contact
area and peak compressive contact strain in this chapter, quickly increased with
time (within first 20-50 seconds) after the ankle was subjected to the target load.
The cartilage deformation rate reached a peak value at the first second after
loading. Thereafter, the cartilage deformation rate sharply decreased. Both
170
contact area and peak contact compressive strain had variation rates close to
zero beyond 40 seconds after loading as shown in Fig. 5.7. For example,
between 1 second and 40 seconds after loading, the cartilage contact area of
Ankle 1 increased by 278% (Table 5.1). Thereafter, little change was measured
in the contact area. From 40 to 300 seconds, the cartilage contact area changed
only by 2.6%.
It has been a challenge in biomedical engineering to determine in-vivo
contact deformation of articular joints under physiological loading conditions. A
literature review indicated that MR imaging has been the most widely used
technique to determine the loading effect on cartilage morphology (Eckstein,
Lemberger et al. 2000; Eckstein, Lemberger et al. 2005; Naish, Xanthopoulos et
al. 2006). Using cadaveric specimens, a joint could be loaded under a constant
load for hours and scanned using MR imaging (Herberhold, Stammberger et al.
1998; Herberhold, Faber et al. 1999). In living human subjects, it is impossible to
accurately scan a joint under loading conditions, especially under body weight,
since the time-dependent biphasic behavior of the cartilage causes continuous
cartilage deformation during loading and the MR imaging always takes minutes
to scan the joint. Therefore, most of the in-vivo MR imaging studies loaded the
joint for designed period of time and then scanned the joint using MR imaging
(Naish, Xanthopoulos et al. 2006). Using this type of protocols, numerous data
have been reported on the volume and average thickness changes of the human
knee joint cartilage after bending, squatting, running, etc. (Eckstein, Tieschky et
al. 1998; Eckstein, Tieschky et al. 1999; Eckstein, Lemberger et al. 2005).
171
Even though MR imaging technique has been widely used to investigate
cartilage deformation under various joint conditions (Herberhold, Stammberger et
al. 1998), no data, however, has been reported on 3D real time cartilage
deformation in response to a physiological loading history. The long image
acquisition time limits the contemporary MR technique to determine short term
deformation of the joint. Our data indicated that quick deformation occurred at the
initial seconds after loading of living ankle joints and very small deformation
change occurred after 40 seconds of loading (Figs. 5.6 and 5.7). Therefore, the
MR imaging technique might only be able to examine the long term response of
the cartilage to applied loads.
Many in-vitro studies have investigated cartilage deformation
in
musculoskeletal joints using various methods (Fukubayashi and Kurosawa 1980;
Black, Matejczyk et al. 1981; Ahmed 1983; Brown and Shaw 1983; Brown and
Shaw 1984; Hodge, Fijan et al. 1986; Ateshian, Soslowsky et al. 1991; Corazza,
Stagni et al. 2005; Eckstein, Lemberger et al. 2005). Comparisons between
these studies have to take into consideration of the different experimental setups
and different joint geometries. While a quantitative comparison is difficult to make,
it might be interesting to discuss the contact behaviors qualitatively among these
studies.
In in-vitro cartilage contact experiment, confined/unconfined compression
or indentation tests have been used to apply a constant loads on cartilage to
simulate creep behavior of the cartilage (Mow, Kuei et al. 1980; Armstrong and
Mow 1982; Armstrong, Lai et al. 1984; Frank and Grodzinsky 1987; Frank and
172
Grodzinsky 1987; Mow, Gibbs et al. 1989; Boschetti, Pennati et al. 2004). Due to
in-vitro nature, these experiments could last from minutes to hours to simulate
short term and long term responses of the cartilage under an applied load.
Typically, a sharp increase in deformation was always observed at initial seconds
after a load being applied, followed by a continuous creeping for a long time. In
this type of experiment, the contact area is constant. This feature represents a
different biomechanical contact condition as compared to the anatomic joint
contact behavior. In a joint contact experiment, the contact area consistently
increases with time as shown inour data.
Cartilage creep behavior was also investigated using cadaveric hip joints
(Armstrong, Bahrani et al. 1979) and patellofemoral joints (Armstrong, Bahrani et
al. 1979) when the joint was subjected to an applied load. These studies also
measured a quick increase in deformation after application of loads, which was
followed by a slow creep deformation. These in-vitro experimental data are
qualitatively consistent with the observations of our study on in-vivo ankle
cartilage deformation. However, some differences might need to be noted.
We found that the contact deformation occurred mostly in early 30 to 40
seconds after loading the ankle joints. The deformation rate was high in early
several seconds after loading. This may be explained that as the joint started to
contact, the contact area was small. As the load continued with time, the contact
area also increased. The increasing contact area slowed down the peak cartilage
deformation. Therefore, the deformation rate dropped quickly in the ankle joint as
shown on Figs. 5.5 to 5.7. In all ankles, the deformation rates dropped to almost
173
zero beyond 50 seconds. In comparison with the data measured from cadaveric
specimens (Armstrong, Bahrani et al. 1979), our data showed higher peak
contact strain (between 23 to 39%) at 300 seconds. Besides the differences in
specimen geometry and experimental setup, one reason for the different contact
strain levels may be due to the differences in measurement of cartilage contact
strains among these studies. In our study, we determined the 3D contact strain
distribution on the cartilage surfaces and then selected the peak contact strain at
each time interval during the experiment. However, in cadaveric experimental
setup, the contact strain was measured at pre-determined area or locations on
the cartilage surface. Therefore, the data measured from cadaveric specimens
might not be the actual peak contact strain as reported in our study.
It should be noted that there are certain limitations in this chapter that
need to be further improved in future investigation. The in-vivo cartilage contact
was investigated under constant loads. The subject might not be able to keep the
body weight center absolutely static while applying most of the body weight on
the testing ankle. A technique needs to be established in future to monitor the
body weight center change. Future studies should also examine the cartilage
deformation under various dynamic loading conditions. Sharp deformation rate
change was seen at early seconds after loading in the ankle joints. Our data
collection did not collect the images between the 0 to 1 second during loading. In
future, we should apply the cine-function of the fluoroscopes to capture the
details of deformation during early period of time after load application. The
cartilage contact area was determined as the overlapping of the opposing
174
cartilage layers, which represented a "theoretical" contact area. This treatment
might result in an under estimation of the contact area since the actual cartilage
deformation will cause deformation beyond the edge of the overlapping area. To
overcome this limitation, a 3D finite element calculation needs to be carried out
using the cartilage overlapping as a displacement boundary condition to calculate
the actual 3D cartilage contact deformation.
In conclusion, this chapter investigated the in-vivo ankle joint cartilage
deformation under a constant body weight loading. Quick deformation responses
of the cartilage, including contact area and peak contact compressive strain, to
the loading were observed in early 50 seconds. Much slower responses were
observed thereafter. These data demonstrated a physiological response of
cartilage in living articular joints when subjected to a time-dependent loading.
These data may provide actual in-vivo boundary conditions for finite element
simulation of biphasic behavior of the human cartilage. Therefore, the combined
dual-fluoroscopic and MR imaging technique provided a powerful tool for
investigation of the real time deformation in living human joints. This technique
can be further used to investigate the cartilage deformation in osteoarthritic joints.
175
Chapter 6: Validation of the Cartilage Deformation Measurement
6.1 Introduction
As a novel technique, the combined MR and dual-orthogonal fluoroscopic
imaging system has been extensively used to measure the kinematics, cartilage
contact pattern, and cartilage deformation of human joints in various papers (Li,
DeFrate et al. 2004; Li, DeFrate et al. 2005; Li, Defrate et al. 2005; Li, Park et al.
2005; de Asia, Wan et al. 2006; Wan, de Asia et al. 2006)as well as in Chapter 2,
3, 4 and 5. However, it is necessary to access the accuracy of this system in
order to give credibility to all its application. Li et al. (Li, Wuerz et al. 2004)
determined that this technique has an accuracy of 0.1 mm and 0.10 in
determining the positions and orientations of the regular objects, respectively.
Furthermore, an other study (Defrate, Papannagari et al. 2006) showed that with
a cadaveric knee specimen the average error in displacement for each of the
joint's positions was 0.04 ± 0.06 mm while the standard deviation of the relative
orientation of the tibia and femur was less than 0.3 ° using this imaging system. In
Chapter 3, a silicon rubber technique has been applied to study the accuracy of
the system to measure the cartilage contact area. It showed that the difference
between the imaging technique and the silicon rubber technique was
approximately 3.4%. All these validation studies have showed that our imaging
176
technique is capable to determine the joints' kinematics as well as cartilage
contact areas.
However,
since
our
ultimate
goal
is to
determine
cartilage
deformation/strain and stress in the joint under physiological loading conditions, it
necessary to evaluate the accuracy of the cartilage deformation measurement
besides the kinematics and cartilage contact area. Hence this chapter is
designated to discuss the validation study about the cartilage deformation
measurement with the combined MR and dual-orthogonal fluoroscopic imaging
system.
177
6.2 Methodology
A human cadaveric foot specimen (male, 68 years old) with a 40 cm tibia
shaft was MR imaged and a 3D anatomic talocrural joint model was constructed,
including the bony surfaces of the tibia and talus, as well as the corresponding
cartilage surfaces. The ankle was then dissected down to the talocrural joint,
leaving the soft tissue around the joint intact. Two spherical ceramic beads (2.5
mm in diameter, 0.0001 mm in manufacturing tolerance) were imbedded in the
tibia and talus separately. The talocrural joint was fixed on a MTS material testing
machine (MTS Qtest, Eden Prairie, MN) and was positioned inside the field view
of the dual-orthogonal fluoroscopic system. In this experimental setup, the talus
was fixed to the base of the material testing machine and the tibial shaft was
fixed to the load cell that can move up and down in displacement control (Fig.
6.1A).
The MTS machine initially measured zero load in the talocrural joint to
ensure no contact between the tibia and talus. The ankle was then left in the
position for 10 minutes. The joint was sprayed using saline to prevent
dehydration during the experiment. The talocrural joint was compressed by
moving the tibia down. The tibia was moved down slowly until the load cell
detected a minimal load (-2 N in this study) and the joint was imaged by the dual
fluoroscopes to create a reference position. The tibia was then moved down and
imaged at different compressive loading levels. The maximal load was 860 N.
The dual fluoroscopic images and the MRI model of the talocrural joint were used
178
a/
b)
0.2
E
E
0
0-
'
E
-0.2
0
-0.4
-0.6
U
- u.o
Compressive load (N)
Fig. 6.1 Comparison of cartilage contact deformation measured using
model matching method and beads position method. (a)
Experimental setup; and (b) measured cartilage contact
deformation data using the two methods under different
loading levels.
179
180
to setup a virtual fluoroscopic system for reproducing the joint motions at all
loading positions as described in Section 2.2.3. These matched model positions
were used to determine the cartilage contact deformation using the method
described in Chapter 4 and 5.
To validate the cartilage contact deformation determined using the model
matching method, the contact deformation was also determined using the beads
positions captured in the fluoroscopic images (Defrate, van der Ven et al. 2006).
The distance along vertical direction between the centers of the beads was
determined at each loading interval. Using the distance measured under minimal
load as a reference, the relative distance change at each loading point was
calculated. The relative distance change represented the cartilage contact
deformation.
181
6.3 Result
Figure 6.1b showed the cartilage contact deformation measured by
the model matching method and the beads distances. The two methods
measured similar deformation values along the loading path. Under an
860N compressive load, the beads distance method measured a 0.55mm
compressive deformation while the model matching method measured a
0.6mm compressive deformation in the joint. Overall, the average
difference between the two method at all loading levels was 0.05 ±
0.01mm (Table 6.1). The peak contact strain was measured to be 28%
and 26%, respectively by the model matching and beads distance
methods.
Force (N) RSA (mm) 3D Model (mm)
0
0
0
37
-0.014
-0.05
180
-0.439
-0.5
840
-0.546
-0.6
Difference (mm)
0
-0.036
-0.061
-0.054
Table 6.1 The displacements measure by the radiostereometric
analysis (RSA) with the beads and the combined MR and
fluoroscopic imaging technique.
182
6.4 Discussion
Radiostereometric analysis (RSA) has a long history in the biomechanics
research and its applicability in in-vivo kinematics measurement is well
established (Selvik, Alberius et al. 1983; van Langelaan 1983; Benink 1985;
Karrholm, Hansson et al. 1985; Ahl, Dalen et al. 1987; Lundberg 1989; Lundberg,
Goldie et al. 1989; Lundberg, Svensson et al. 1989; Lundberg, Svensson et al.
1989; Lundberg, Svensson et al. 1989). In this chapter, we used this
methodology to validate the accuracy of the cartilage deformation measurement
with the combined MR and fluoroscopic imaging technique. Based on our results,
the displacement difference between these two techniques was 0.05 mm, which
was within the accuracy of the RSA. Hence we are confident to draw the
conclusion that the combined MR and fluoroscopic imaging technique should be
at least as accurate as the RSA in term of investigation of the in-vivo kinematics.
Furthermore, the peak contact strain measured by these two techniques differed
by about 2% in this validation study. All these data supports the validity of the
cartilage deformation measurement in Chapter 4 and 5.
183
Chapter 7:
Modeling of Human
Ankle Cartilage
7.1 Introduction
7.1.1 General Information
Computational modeling is commonly used in all science and engineering
disciplines to represent complex systems. As discussed in Chapter 1, articular
cartilage is a heterogeneous material. Various constitutive models have been
developed to investigate the mechanical behavior of articular cartilage under a
wide range of static and dynamic mechanical loads. It has been widely accepted
that articular cartilage is a biphasic material that consists of a solid matrix and a
fluid phase (Mow, Kuei et al. 1980). Both phases contribute to the mechanical
properties of the articular cartilage. However, a large amount of researchers
simply treat the cartilage as a single solid phase, elastic material due to its
simplicity and the fact that under high loading rates, the mechanical behavior of
the cartilage does not deviate much from a linear elastic model (Eberhardt, Keer
et al. 1990; Blankevoort, Kuiper et al. 1991; Hirokawa 1991). An improvement is
made by incorporating the viscosity into the elastic model so that the timedepend properties of the cartilage could be described (Woo, Simon et al. 1980; Li
and Herzog 2004; Baek, Wells et al. 2005; Park and Ateshian 2006). In this
Chapter, several computational models will be discussed to investigate the
mechanical behavior of human ankle cartilage.
184
7.1.2 Rigid Body Spring Model (RBSM)
We have already discussed RBSM in Chapter 4. It will be used again later
in this Chapter to investigate the in vivo human ankle cartilage material
properties. In this model, the elastic cartilage layer is simulated by a series of
compressive spring while the bony segments are modeled as rigid bodies. The
deformation of the springs is then determined by the relative displacement
between the rigid bodies. The RBSM model has certain preferences due to its
simplicity and computational efficiency and has been introduced to the study of
various joint surface contact pressure for human hip, knee, shoulder, and wrist
joints (An, Himeno et al. 1990; Horii, Garcia-Elias et al. 1990; Blankevoort, Kuiper
et al. 1991; Schuind, Cooney et al. 1995; Li, Sakamoto et al. 1997). However, the
shortcoming of this model is that it so oversimplifies the problem that it could not
retrieve any information within the cartilage. It also neglects the bulge due to the
Poisson's effect, which is unrealistic.
185
7.1.3 Finite Element Model with Linear Elastic
Material Properties
Finite element method is a widely accepted technique in articular joint
contact analysis. Finite element model with linear elastic material properties is an
improvement from the RBSM. Although it uses the same cartilage material
property parameters: Young's modulus E and Poisson's ratio v as the RBSM, it
gives out more information, such as the stress/strain distribution within the
cartilage layer. It also considers the bulge effect of cartilage. Various models
have been developed for the foot and ankle to study the stress distribution within
the cartilage layer under different loading conditions (Jacob and Patil 1999; Chen,
Tang et al. 2001; Cheung, Zhang et al. 2005). The trade-off of this model
compared with RMSB is that it is more computationally expensive, especially
when the geometries of the models are irregular. Another shortcoming of finite
element model with linear elastic material properties is that it ignores the timedependent nature of cartilage. As cartilage is composed by both solid and liquid
phases, the loading history of the cartilage affects the stress-strain distribution. In
order to overcome this, a more complicated model is discussed in next section.
186
7.1.4 Biphasic/Poroelastic Model with Finite Element
Analysis
Biphasic/poroelastic model is currently the most popular constitutive model
for cartilage. Van der Voet et al. (van der Voet, Shrive et al. 1993) showed that
ABAQUS (Providence, RI) gave similar results to those of Spilker et al. (Spilker,
Suh et al. 1988). Prendergast et al. (Prendergast, van Driel et al. 1996) used
MARC, DIANA, SWANDYNE to study a confined cartilage compression test.
Both linear and non-linear strain-dependent permeability were investigated. Their
results were close to Spilker et al. (Spilker, Suh et al. 1988) for both linear case
and for the non-linear case. The unappreciable difference among each codes
and Spilker et al. (Spilker, Suh et al. 1988) was concluded to be caused by the
penalty parameter Spilker et al. (Spilker, Suh et al. 1988) used and the different
integration schemes in the time domain. Shortly van der Voet (van der Voet 1997)
reported that the ABAQUS results compared very favorably with Spilker et al.
(Spilker, Suh et al. 1988) and other codes used by Prendergast et al.
(Prendergast, van Driel et al. 1996) for both linear and non-linear straindependent permeability. It also noticed that ABAQUS includes strain-dependent
permeability directly without resorting to user-written subroutines compared with
other codes. Wu et al. (Wu, Herzog et al. 1998) compared the results from
ABAQUS with the analytical solutions of three linear cartilage deformation
problems: an unconfined indentation test, the contact of a spherical bone
covered with a cartilage layer with a rigid plate, and an axi-symmetric joint
187
contact test. All the finite element modeling (FEM) predictions and the analytical
solutions were in good agreement for small strains (e<10%) and limited time
periods. The discrepancy most likely lies in the fact that all the analytical
solutions are based on infinitesimal strain theory. Non-linear problem was not
investigated because all the analytical solutions with strain-dependent
permeability are not available. Later on Wu et al. (Wu, Herzog et al. 1999)
incorporated chondrocytes into the cartilage model and used ABAQUS to study
the deformation of the cell during a confined compression test and an unconfined
compression. A macroscopic model was used first to calculate the stress-strain
and fluid pressure around the cell's location. Then the FEA was carried out to
calculate the deformation of the cell with a microscopic model. Permeability was
assumed to be strain-independent for both cartilage and chondrocytes. Recently
Wu et al. (Wu and Herzog 2000) incorporated the stain-dependent permeability
into the cell deformation problem during a unconfined compression test and also
studied the deformation of chondrocytes in unconfined compression tests for
cyclic loading (Wu and Herzog 2006).
The biphasic model parameters: HA, v,,k and poroelastic model parameters:
Es,v s , k' are equivalent with the following relationship(Wu, Herzog et al. 1998):
HA =
s
+ 2p
s ,
Es =
PS (3 s + 2p,)
188
, Vs=
AS
where
HA
s,
and p,are the first and second Lame's constants of the solid phase,
is the aggregate modulus of the solid phase, Es is Young's modulus of the
solid phase and v, is the Poisson's ratio of the solid phase.
The biphasic permeability k is related to the poroelastic permeability k' by
k'= yk
where volume weight of the interstitial fluid y = 9.81 x 10- 6 Nmm - 3
A review for all the material
parameters used in literature for
biphasic/poroelastic models is shown in Table 7.1. The solid volume fraction ,
is set to be 0.2 for cartilage.
189
Table 7.1 CARTILAGE biphasic/poroelastic model parameters
(Ea)
vs
l
k'(mm s )
As (MPa)
Ps (MPa)
0.1
0.2
(m4 N ks')
O =0.2
Spilker 1988
For nonlinear
permeability
ko=7.5*105 s,M=10
0.167
K = Ko Exp (Me)
7.358*10 8
Van der Voet 1993
s = 0.2
0.467
0.1667
Predergast 1996
For nonlinear
permeability
5F s,M=10
ko = 7.5*10
0.4667
0.1667
0.1
0.2
7.5*10 - i
-+eV
s
void ratione =
0.4667
0.1667
0.1
0.2
7.5*10.'5
Unconfined indention
Spherical bone with
0.55
2.787* 10. 7
0.0
Wu 1998
cartilage
Contacts
with a rigid
0.5
1.962*10.8
0.0
0.5
1.962*10.8
0.10
Wu 1999
Axi-symmetrical joint
contact
For the matrix only
ko =1.0*10s15
S= K o Exp(Me)
K=
Van der Voet 1997
+e
o
M
plate
eo
=
0.4
0.1
1.0"10
0.5
0.1
1.0*10 15
0.675
0.125
'
4*10 14
0.450
0.106
1.16*1015
0.450
0.106
0.5
0.1
4.0
K = 0.0848
M
Wu 2000
4.638
eXK
eo
K
exp
=
-
)~e
-[(
2 )+eO
0, = 0.2
Donzelli 2004
eo = 4.2
K = 0.0848
M = 4.638
Han 2005
K=Ket 0
-
eo
exp{M ( l+e) _
2
Federico 2005
Wu 2006
I+eo
Same as Han 2005
For the matrix only
s= 0.2
For nonlinear
permeability same as
Wu 2000
190
0.055
0.203
1.16*10
7.2 The Effect of Permeability of Cartilage
Superficial Zone on the Behavior of Stress
Relaxation and Creep of Human Ankle Joint
The microstructure of articular cartilage could be divided into four distinct
zones: the superficial zone, middle zone, deep zone, and calcified cartilage zone
as discussed in Chapter 1. It is believed that the superficial zone of articular
cartilage has a lower permeability, which may be related to the close packing of
the collagen fibrils resulting in a system of much narrow channels which offer a
greater resistance to flow (Maroudas, Bullough et al. 1968). The collagen fibrils at
the surface have much smaller diameter and are more closely packed (Fig. 7.1).
This section investigated the influence of permeability of the superficial zone on
the behavior of cartilage stress relaxation and creep of human ankle joint using a
2D biphasic poroelastic finite element model (FEM) that was created from a living
human ankle joint.
The 2D geometry of the tibial cartilage and talar cartilage layers was
digitized from a MR image of a living subject's ankle joint and then imported into
ABAQUS finite element software (ABAQUS, Inc., Providence, RI) to create a
plane-strain mesh model (Fig. 7.2). The top 0.1mm of the cartilage was defined
as the superficial zone (Fetter, Leddy et al. 2006). The articular cartilage was
modeled as being attached to a cortical bone of approximate 6 mm thickness.
Elastic material properties were used for the bone with Young's modulus as
191
2GPa and Poisson's ratio as 0.2 (Han, Federico et al. 2005). Poroelastic material
properties were used for the superficial zone and the other zones of the cartilage.
The Young's modulus and the Poisson's ratio were E=0.4667 MPa and u =
0.1667 throughout the cartilage. The permeability of the cartilage except the
superficial zone was k = 7.5 x10-1 5m 4 / Ns (Spilker, Suh et al. 1988). The
permeability k' of the cartilage surface layer was assigned to be 0.2k, 0.4k, 0.6k,
0.8k and k, respectively. The cartilage contact was assumed to be frictionless.
The bottom of the talus cortical bone was fixed all the time for all the cases.
192
(a)
(b)
Fig. 7.1 Electron photomicrograph of collagens at (a) the articular
surface; (b) deep layer of the articular cartilage of the
lateral femoral condyle of a 41 year old man.
193
194
.Tibial Cartilaqe
Talar Cartilage
(a)
(b)
Fig.7.2 (a) MR image of the ankle joint; (b) cartilage model of the
ankle joint created from (a).
195
196
7.2.1 Stress Relaxation
A total vertical displacement of 0.15 mm (corresponding to an approximate
5%compression ratio) was completed on the top of tibia within a ramp time to=ls.
(Fig. 7.3). The tibia was kept in equilibrium for a further 500s. The reaction force
on the contact surface was predicted as a function of time (Fig.7.4). The pore
pressure distributions at to=1s were compared between different surface layer
permeability.
The peak reaction force (at time to=ls) were 6.08, 5.85, 5.63, 5.45,
5.28N/mm for k'=0.2k, 0.4k, 0.6k, 0.8k and k, respectively (Fig.7.5). The reaction
force increased monotonically while the surface layer permeability decreased.
When the surface layer permeability was reduced to 20% of the cartilage
permeability, the reaction force increased by 62% at 50s relaxation. At to=ls, the
maximum pore pressure were 0.341, 0.323, 0.308, 0.294, 0.281 MPa for k'=0.2k,
0.4k, 0.6k, 0.8k and k, respectively (Fig. 7.6).
197
198
Displacement (mm)
0.15
1
500
Time (s)
Fig. 7.3 The displacement curve applied to the top of the tibia
199
200
A
E5
03
CO
0
2E
0
100
200 300
Time (s)
400
500
Fig. 7.4 Reaction force curves for different surface layer permeability
during stress relaxation.
201
202
Reaction Force (N/mm)
6.Z I
6.0
5.85.6
5.4.
52 v.l
0
Fig. 7.5
I
I
_
0.2
0.4
0.6
I
0.8
_
_
1 Normalized
Surface Layer
Permeability (k)
Peak reaction forces at t0=ls for different surface layer
permeability.
203
204
k'=O.2k
POR(MPa)
+3 .500e-01
+3.143e-01
+2. 786e-01
+2.428e-01
+2.071e-01
+1.714e-01
+1.357e-01
+9.996e-02
+6.424e-02
+2. 52e-02
-7.200e-03
k'=0.4k
k'=0.6k
k'=0.8k
k'=k
40·4
Fig. 7.6 The pore pressure distribution for different surface layer
permeability at to=ls during stress relaxation.
205
206
7.2.2 Creep
A vertical 5N/mm load was evenly applied to the top of tibia within a ramp
time to=ls (Fig. 7.7). The load was kept constant for 500s. The displacement of
the tibia was predicted as a function of time (Fig.7.8). The pore pressure
distributions at t0=1s were compared between different surface layer permeability.
The tibia displacement at time to=ls were 0.179, 0.183, 0.187, 0.190,
0.194mm for K'=0.2K, 0.4K, 0.6k, 0.8k and k, respectively (Fig. 7.9). The
displacement decreased monotonically while the surface layer permeability
decreased. When the surface layer permeability was reduced to 20% of the
cartilage permeability, the tibia creep displacement decreased by 8% at time
t=51s. At to=ls, the maximum pore pressure were 0.299, 0.293, 0.288, 0.283,
0.277 MPa for K'=0.2K, 0.4k, 0.6k, 0.8k and k, respectively (Fig. 7.10).
207
208
Force (N/mm)
5
500
1
Time (s)
Fig. 7.7 The vertical load curve applied to the top of the tibia
209
210
0.15
E 0.10
00
SAA
I
0
100
200 300
Time (s)
400
500
Fig. 7.8 Displacement curves for different surface layer permeability
during creep.
211
212
Displacement (mm)
,A ri-,
-•
U.II30
1
0.190
0.1850.180
0.175
I
"1
0
·
·
·
1
0.2 0.4 0.6 0.8 1.0
Normalized
Surface Layer
Permeability (k)
Fig. 7.9 Tibia displacements at to=ls for different surface layer
permeability.
213
214
PoR(MPa)
k'=O.2k
+3.000e-01
+2.694e-01
+2.387e-01
+2.081e-01
+1.774e-01
+1.468e-01
+1.161e-01
+8.545e-02
+5.480e-02
+2.415e-02
-6.500e-03
k'=O.4k
k'=0.6k
k'=0.8k
k'=k
40lP
Fig. 7.10 The pore pressure distribution for different surface layer
permeability at to=ls during creep.
215
216
7.2.3 Discussion
Although it is well known that articular cartilage is a heterogeneous
material due to its microstructure, people usually simplify it as a homogeneous
material with uniform permeability throughout the cartilage layers for finite
element analysis of anatomic joint contact problems (Donzelli, Gallo et al. 2004;
Han, Federico et al. 2005). This study showed that the variation of the
permeability of the surface cartilage layer could cause significant differences of
the joint contact problems, such as stress relaxation and creep. Further
experimental investigation of the permeability variation in the intact joints might
be helpful to facilitate the finite element analysis of joint contact problems. In the
future, a 3D FEM calculation will be performed to investigate the effect of
permeability change of cartilage superficial zone on the joint contact deformation
(Fig. 7.11).
217
218
POR(MPa)
+1.248e-01
+1.135e-01
+1.022e-01
+9.096e-02
+7.967e-02
+6.839e-02
+5.711e-02
+4.583e-02
+3.455e-02
+2.327e-02
+1.198e-02
+7.017e-04
-1.058e-02
-1.058e-02
Fig. 7.11 The pore pressure distribution for 3D finite element
model during stress relaxation.
219
220
7.3
In-Vivo Real Time
Human
Ankle
Cartilage Material Properties
Study of the response of human synovial joints to imposed loads requires
quantitative information on the material properties of the articular cartilage.
Normal articular cartilage shows a time-dependent response to mechanical
loading. Although cartilage material property has been extensively investigated,
no data has been reported on in-vivo cartilage material properties as a function of
loading history. This section investigated in-vivo cartilage material properties of
human ankle joints in real time under weightbearing condition using the
combined MR and dual-orthogonal fluoroscopic imaging technique.
Four healthy ankles of male subjects (38-44 years old) were scanned
using a 1.5 Tesla scanner (GE, Milwaukee, WI) with a surface coil and threedimensional (3D) spoiled gradient-recalled (SPGR) sequence while the subject
lying supine. Sagittal plane images at 1 mm intervals with a resolution of 512 x
512 pixels were acquired. A 3D anatomic model, including the tibia, talus and
their cartilage layers, was constructed from the MR images for each ankle. The
thickness distribution of both the distal tibial cartilage layer and the proximal talar
cartilage layer were calculated using a point-to-surface projection algorithm.
Before the experiment, the subject sat closely to the testing platform for - 60
minutes with target ankle in a relaxed, non-weightbearing position. The subject
then positioned the ankle within the common imaging zone of the two
221
fluoroscopes. Then the in-vivo ankle positions were captured under constant
weightbearing condition using a dual-orthogonal fluoroscopic imaging technique
(Wan, de Asia et al. 2006; Wan, de Asia et al. 2007; Li, Wan et al. 2008). A force
plate constructed using a 6 DOF load cell (JR3 Inc, Woodland, CA) was
incorporated into the fluoroscopic system to measure ground reaction forces
during experiment. The subject then quickly applied the designed load to the foot.
In this experiment, the 4 ankles were loaded using different target loads, the first
- 820N, the second - 700, the third - 800N and the fourth - 780N, which were
monitored by the force plate. In all experiment, the target load was controlled
within ±10N around the target load. The foot under body weight was imaged
within 1 second after being loaded. While a constant ground reaction force was
maintained, the ankle was imaged in every 2 seconds for 5 times and followed by
every 10 second for 5 times. Thereafter, the ankle joint was imaged at every 60
seconds until the subject felt difficult to maintain the ankle joint stability.
In-vivo ankle configuration was then reproduced by manipulating the 3D
ankle joint models in the virtual space until their projected contours matched the
two sets of the orthogonal fluoroscopic images concurrently. Once the ankle joint
position was known, the relative positions of the cartilage layers were also
determined. The contact deformation was defined as the overlapping of the tibial
and talar cartilage layers (Fig. 7.12). The contact strain
was defined as the
cartilage penetration divided by the thickness of the two cartilage layers. To
investigate the cartilage material properties, the bones were assumed to be rigid
bodies and the cartilage layers were considered as isotropic, homogeneous and
222
M: Medial
L: Lateral
0
0.2 0.4 0.6 0.8
Anterior
1 1.2 mm
Posterior
300
T(s)
Fig. 7.12 Compressive cartilage contact deformation distributions of
one subject plotted on the tibial cartilage surface at
different time intervals after loading.
223
linear-elastic. Nonlinear stress-strain relationship, which considers the effect of
finite strain, was introduced to calculate the pressure distribution (Hayes and
Mockros 1971):
o-=-S ln(1- e)
(7.1)
with:
(1- v) E
(1+ v) (1- 2v)
Where E is the Young's modulus and v is the Poisson's ratio of the
articular cartilage. The joint contact force was calculated based on the pressure
distribution and the geometry of the articular cartilage layer. For v=0.1, 0.2, 0.3,
0.4, 0.45, 0.49, E was calculated so that the joint contact force matched the force
recorded by the force plate (Fig. 7.13).
For v = 0.1, the Young's modulus decreased from 44.52 MPa at T=ls to
19.98 MPa at T=10s with an average change rate r as -2.73MPa/s (Fig. 7.13).
Then it decreased to 12.81 MPa at T=50s with r = -0.18 MPa/s. Afterwards it
decreased to 12.50 MPa at T=300s with r = -0.0012 MPa/s.
For v = 0.2, the Young's modulus decreased from 40.98 MPa at T=ls to
18.39 MPa at T=10s with r = -2.51 MPa/s (Fig. 7.13). Then it decreased to 11.79
MPa at T=50s with r = -0.17 MPa/s. Afterwards it decreased to 11.51 MPa at
T=300s with r = -0.0011 MPa/s.
224
For v = 0.3, the Young's modulus decreased from 33.82 MPa at T=ls to
15.18 MPa at T=10s with r = -2.07 MPa/s (Fig. 7.13). Then it decreased to 9.73
MPa at T=50s with r = -0.14MPa/s. Afterwards it decreased to 9.50 MPa at
T=300s with r = -0.0009 MPa/s.
For v = 0.4, the Young's modulus decreased from 21.25 MPa at T=1s to
9.54 MPa at T=10s with r = -1.3 MPa/s (Fig. 7.13). Then it decreased to 6.12
MPa at T=50s with r =0.086MPa/s. Afterwards it decreased to 5.97 MPa at
T=300s with r = -0.0006 MPa/s.
For v = 0.45, the Young's modulus decreased from 12.00 MPa at T=ls to
5.39 MPa at T=10s with r = -0.73 MPa/s (Fig. 7.13). Then it decreased to 3.45
MPa at T=50s with r = -0.049MPa/s. Afterwards it decreased to 3.37 MPa at
T=300s with r= -0.00018 MPa/s.
For v = 0.49, the Young's modulus decreased from 2.66 MPa at T=ls to
1.19 MPa at T=10s with r = -0.16 MPa/s (Fig. 7.13). Then it decreased to 0.77
MPa at T=50s with r = -0.011 MPa/s. Afterwards it decreased to 0.75 MPa at
T=300s with r = -0.00008 MPa/s.
The Young's Modulus of the ankle cartilage quickly decreased with time
after the ankle was subjected to the target load. The quick decrease was
observed within first 10s. Much slower change was observed thereafter. The
cartilage reached equilibrium after about 50s. Our data was consistent with the
previous in-vitro experimental data for both long (E = 12MPa, v = 0.42) and short
(E = 7.1, v = 0.37) terms (Hayes and Mockros 1971), although our data has
225
provided more data points of the in-vivo cartilage material properties. Since the
Young's modulus and Poisson's came in together as the aggregate modulus S in
our model, it was difficult to separate one from the other. Biphasic material
properties will be incorporated into the model in the future. These data may
provide actual in-vivo boundary conditions for finite element simulation of
biphasic behavior of the human cartilage. We will also look into the mechanical
effects of the degenerated in-vivo cartilage in the future.
226
40
3o
20
10
0
0
so
100
150
200
250
300
T(s)
Fig. 7.13 Young's modulus of in-vivo ankle cartilage as a function of
loading time
227
228
Chapter 8:
Conclusions
8.1 Summary
This thesis completes my research work carried out in the past 3 years,
which is focused on the in vivo biomechanics of human ankle joint complex. In
Chapter 2,the kinematics of in vivo human ankle joint complex was studied using
a combined MR and fluoroscopic imaging technique. This methodology was
shown to have the accuracy of 0.1mm in translation and 0.10 in rotation to
determine an object pose in space (Li, Wuerz et al. 2004) while the average
errors for human joints was reported to be 0.04 mm for translation and 0.30 for
rotation (Defrate, Papannagari et al. 2006). Our results show that the talocrural
joint contributes more in dorsi/plantarflexion, while the subtalar joint is more
responsible for inversion/eversion and internal/external rotation of the AJC joint.
In addition, during the stance phase of walking there is a complicated
combination of the motion of the talocrural and subtalar joints. The talocrural and
subtalar joints function synergistically to transfer the ground reaction forces
through the ankle joint complex and keep the body stable.
In Chapter 3, Cartilage-to-cartilage contact area during the stance phase
of walking was determined by quantifying the amount of overlap of the cartilage
surfaces of the tibia and talus after the 6 DOF in-vivo ankle positions were
reproduced by the MR image-based talocrural joint models using the combined
MR and fluoroscopic imaging technique described in Chapter 2. The in-vivo
cartilage contact data showed significant changes in cartilage contact areas at
229
different positions during the stance phase of walking. The articular cartilage
contact was only observed in less than 50% of the cartilage coverage areas in
the talocrural joint at various positions of the simulated stance phase of walking.
Contact frequency was also used to describe the contact pattern of the cartilage.
No dominancy of the contact locations was found.
In Chapter 4, the 3D compressive contact strain distribution within the
ankle joint was determined under full body weight based on the thickness
distribution and the deformation of the cartilage layers. The mean of the average
cartilage contact strain of the entire contact area was only 7.5% whereas the
mean peak contact strain reached 34.5%. The in-vivo cartilage deformation was
not homogeneous in the ankle joint, although the ankle joint has been considered
as a relatively congruent and homogeneous joint due to the cartilage thickness
distribution. This data showed that large cartilage deformation could be reached
during daily activities. The peak contact strain occurred at the lateral side of the
ankle joint, which might be attributed to the kinematics of the ankle joint in order
to keep body balance under full body weight as described in Chapter 1. As large
stain was observed, non-linear stress-strain relationship was used to estimate
the contact pressure distribution within the joint. With Young's modulus as 7.5
MPa and Poisson's ratio as 0.4, the average peak pressure was 6.87 ± 1.76 MPa
and the average joint contact force was 1.66 ± 0.12 body weight.
Chapter 5 discusses the in vivo creep test of human ankle joint. With the
combined fluoroscopic and magnetic imaging technique used in previous
chapters, a constant load was applied to the in vivo ankle joint and a series of
230
fluoroscopic images were taken to investigate the creep behavior of the cartilage
layers. This creep phenomenon is caused by the biphasic/poroelastic nature of
the cartilage. From 0 to 300 seconds, a 151% increase was observed for the
contact area while the peak contact penetration increased from 18.8 ± 5.6% to
32.2 ± 8.4%. The contact deformation occurred mostly in early 30 to 40 seconds
after loading the ankle joints. The deformation rate was high in early several
seconds after loading. In all ankles, the deformation rates dropped to almost zero
beyond 50 seconds. These data demonstrated a physiological response of
cartilage in living articular joints when subjected to a time-dependent loading and
provided the boundary conditions for the computation of in vivo cartilage material
properties in Chapter 7.
In Chapter 6, a series of validation studies have been assessed to
evaluate the power of this combined MR and fluoroscopic imaging technique.
Previous study has already shown that this technique has an accuracy of 0.1 mm
and 0.1' in determining the positions and orientations of the regular objects,
respectively (Li, Wuerz et al. 2004). For cadaveric joints (Defrate, Papannagari et
al. 2006), the average error in displacement for each of the joint's positions was
0.04 ± 0.06 mm while the standard deviation of the relative orientation was less
than 0.3 ° . The novel imaging technique was compared with the silicon rubber
technique in term of measuring the cartilage contact area using a cadaveric
human ankle specimen. This area measurement by the imaging technique was
approximately 3.4% smaller than the physical measurement by the silicon casting
method. In addition, Furthermore, an accuracy study of the cartilage thickness
231
measurement showed that on average the MR image based cartilage was about
2.4 ± 4% thinner compared to that captured from the actual specimen, which
means that the MR image based cartilage model is close to the actual cartilage.
In addition, the precision of 0.08 mm or 5.6 % for the mean cartilage thickness
was also obtained. A more complicated experiment was conducted to compare
the radiostereometric technique and the imaging technique. The result shows
that the average difference between displacements determined by the two
method at all loading levels was 0.05 ± 0.01mm. The peak contact strain
was measured to be 28% and 26%, respectively by the model matching
and RSA methods. All these studies shows that the combined MR and
fluoroscopic has the acceptable accuracy in determining ankle joint
kinematics, cartilage contact area, deformation and strain.
In Chapter 7, various computation models have been discussed to
investigate the mechanical behavior of cartilage, such as the RBSM, linear
elastic, and biphasic/poroelastic. A 2D finite element model based on the
in vivo cartilage geometry was developed with biphasic/poroelastic
material properties to investigate the effect of the permeability of the
cartilage superficial zone on the behavior of stress relaxation and creep of
human ankle joint. This study showed that the variation of the permeability of the
surface cartilage layer could cause significant differences of the joint contact
problems, such as stress relaxation and creep. Another 3D RBSM model was
also developed to study the material properties of in vivo human ankle cartilage
232
based on the data of the in vivo creep test discussed in Chapter 5. The results
showed the time evolution curves of the Young's modulus of the in vivo ankle
cartilage with different constant Poisson's ratios under a constant loading.
233
8.2 Future Steps
To further understand the mechanism causing osteoarthritis, we have
started analyzing a group of ankle osteoarthritic patients. Patients first undergo
MR imaging and then perform functional activities, while being dynamically
imaged using the dual orthogonal fluoroscopic system. The images from MR
scan will be used to build a three dimensional model of the patients' ankle joint
complex, which will then be matched to the fluoroscopic images as for the
healthy subjects discussed in the previous chapters. The results will be
compared with those of the healthy subjects. This information will provide insight
into the etiology and surgical treatment to osteoarthritis.
With the development of the dual-orthogonal fluoroscopic imaging system,
the subject could be imaged at 30 frames/second. This enables the subject to
perform more complicated physiological motions than simulated walking, such as
running and stair climbing, within the fluoroscopic imaging system. With the
analysis of all these motion, we could acquire the kinematics of the joint as well
as the stress-strain distribution of the cartilage during the daily life of people and
investigate the biomechanics of in vivo cartilage in a broad picture.
Another direction of future research would be the development of a welldefined patient-specific 3D finite element model which incorporates the
biphasic/poroelastic material properties of cartilage as shown in Fig. 7.X. With
this model, the material properties of cartilage could be studied in depth. The
effect of the permeability of cartilage superficial zone on the biomechanical
behavior of human ankle joint should first be studied in 3D as in Section 7.2.
234
Later on with similar algorithm discussed in section 7.3, the in vivo material
properties could be back out as functions of time. As it is suggested that the
change of the cartilage material properties might be a sign of the early
degeneration of cartilage (Brommer, Laasanen et al. 2006), the development of
this technique might lead to a breakthrough in the diagnosis and treatment of
osteoarthritis. However, we have to admit that all these investigation will be very
computational expensive and might require further advancement of the capability
of the computers as well as the computational algorithms.
As all the methodologies mentioned above could be applied to other joints
of the human body, such as the knee, hip, shoulder, and wrist, the ultimate goal
of this research would be to investigate the mechanobiology of in vivo articular
cartilage under all kinds of physiological loading condition. With the combined
MR and fluoroscopic imaging system, we have accessed the in vivo stress-strain,
and material properties of articular cartilage. The next step would be using all
these information as guide lines to design both in vitro and in vivo experiments to
study the response of the chondrocytes and extracellular matrix to the in vivo
stress-strain obtained from the research mentioned above in order to understand
the etiology of osteoarthritis, to improve the current medical treatment, to
diagnose the osteoarthritis at early stages, and to prevent the further
degeneration of articular cartilage.
235
Reference
Adam, C., F. Eckstein, et al. (1998). "The distribution of cartilage thickness within
the joints of the lower limb of elderly individuals." J Anat 193 :203-14.
Ahl, T., N. Dalen, et al. (1987). "Mobility of the ankle mortise. A roentgen
stereophotogrammetric analysis." Acta Orthop Scand 58(4): 401-2.
Ahmed, A. M. (1983). "A pressure distribution transducer for in-vitro static
measurements in synovial joints." J Biomech Eng 105(3): 309-14.
AI-Ali, D., H. Graichen, et al. (2002). "Quantitative cartilage imaging of the human
hind foot: precision and inter-subject variability." J Orthop Res 20(2): 24956.
An, K. N., S. Himeno, et al. (1990). "Pressure distribution on articular surfaces:
application to joint stability evaluation." J Biomech 23(10): 1013-20.
Anderson, D. D., J. K. Goldsworthy, et al. (2006). "Intra-articular contact stress
distributions at the ankle throughout stance phase-patient-specific finite
element analysis as a metric of degeneration propensity." Biomech Model
Mechanobiol 5(2-3): 82-9.
Armstrong, C. G., A. S. Bahrani, et al. (1979). "In vitro measurement of articular
cartilage deformations in the intact human hip joint under load." J Bone
Joint Surg Am 61(5): 744-55.
Armstrong, C. G., W. M. Lai, et al. (1984). "An analysis of the unconfined
compression of articular cartilage." J Biomech Eng 106(2): 165-73.
236
Armstrong, C. G. and V. C. Mow (1982). "Variations in the intrinsic mechanical
properties of human articular cartilage with age, degeneration, and water
content." J Bone Joint Surg Am 64(1): 88-94.
Arndt, A., P. Westblad, et al. (2004). "Ankle and subtalar kinematics measured
with intracortical pins during the stance phase of walking." Foot Ankle Int
25(5): 357-64.
Askew, M. J. and V. C. Mow (1980). "The biomechanical function of the collage
ultrastructure of articular cartilage." J Biomech Eng: 100-105.
Ateshian, G.A., W. M. Lai, et al. (1994). "An asymptotic solution for the contact
of two biphasic cartilage layers." J Biomech 27(11): 1347-60.
Ateshian, G. A., L. J. Soslowsky, et al. (1991). "Quantitation of articular surface
topography
and
cartilage
thickness
in
knee
joints
using
stereophotogrammetry." J Biomech 24(8): 761-76.
Athanasiou, K.A., G. G. Niederauer, et al. (1995). "Biomechanical topography of
human ankle cartilage." Ann Biomed Eng 23(5): 697-704.
Athanasiou, K. A., M. P. Rosenwasser, et al. (1991). "lInterspecies comparisons
of in situ intrinsic mechanical properties of distal femoral cartilage." J
Orthop Res 9(3): 330-40.
Aydelotte, M. B., B. L. Schumacher, et al. (1992). "Heterogeneity of articular
chondrocytes." Articular Cartilage and Osteoarthritis: 237-249.
Baek, S., P. B. Wells, et al. (2005). "Heat-induced changes in the finite strain
viscoelastic behavior of a collagenous tissue." J Biomech Eng 127(4):
580-6.
237
Beaudoin, A. J., S. M. Fiore, et al. (1991). "Effect of isolated talocalcaneal fusion
on contact in the ankle and talonavicular joints." Foot Ankle 12(1): 19-25.
Benink, R. J. (1985). "The constraint-mechanism of the human tarsus. A
roentgenological experimental study." Acta Orthop Scand Suppl 215: 1135.
Bingham, J. and G. Li (2006). "An optimized image matching method for
determining in-vivo TKA kinematics with a dual-orthogonal fluoroscopic
imaging system." J Biomech Eng 128(4): 588-95.
Black, J. D., M. B. Matejczyk, et al. (1981). "Reversible cartilage staining
technique for defining articular weight-bearing surfaces." Clin Orthop Relat
Res(159): 265-7.
Blankevoort, L., J. H. Kuiper, et al. (1991). "Articular contact in a threedimensional model of the knee." J Biomech 24(11): 1019-31.
Boschetti, F., G. Pennati, et al. (2004). "Biomechanical properties of human
articular cartilage under compressive loads." Biorheology 41(3-4): 159-66.
Brommer, H., P. A. Brama, et al. (2005). "Functional adaptation of articular
cartilage from birth to maturity under the influence of loading: a
biomechanical analysis." Equine Vet J 37(2): 148-54.
Brommer, H., M. S. Laasanen, et al. (2006). "In situ and ex vivo evaluation of an
arthroscopic indentation instrument to estimate the health status of
articular cartilage in the equine metacarpophalangeal joint." Vet Surg
35(3): 259-66.
238
Brown, T. D. and D. T. Shaw (1983). "In vitro contact stress distributions in the
natural human hip." J Biomech 16(6): 373-84.
Brown, T. D. and D. T. Shaw (1984). "In vitro contact stress distribution on the
femoral condyles." J Orthop Res 2(2): 190-9.
Bruns, J. and B. Rosenbach (1990). "Pressure distribution at the ankle joint." Clin
Biomech 5: 153-161.
Buckwalter, J. A., H. J. Mankin, et al. (2005). "Articular cartilage and
osteoarthritis." instr Course Lect 54: 465-80.
Buckwalter, J. A. and V. C. Mow (1992). "Cartilage repair in osteoarthritis."
Osteoarthritis :Diagnosis and Management: 71-107.
Buckwalter, J. A., L. A. Rosenberg, et al. (1990). "Articular cartilage: Composition,
structure, response to injury, and methods of facilitation repair." Articular
Cartilage and Knee Joint Function: Basic Science and Arthroscopy.: 19-56.
Bullough, P. G. and A. Jagannath (1983). "The morphology of the calcification
front in articular cartilage. Its significance in joint function." J Bone Joint
Surg Br 65(1): 72-8.
Calhoun, J. H., F. Li, et al. (1994). "A comprehensive study of pressure
distribution in the ankle joint with inversion and eversion." Foot Ankle Int
15(3): 125-33.
Cawley, P. W. and E. P. France (1991). "Biomechanics of the lateral ligaments of
the ankle: an evaluation of the effects of axial load and single plane
motions on ligament strain patterns." Foot Ankle 12(2): 92-9.
239
Chao, E. Y., R. K. Laughman, et al. (1983). "Normative data of knee joint motion
and ground reaction forces in adult level walking." J Biomech 16(3): 21933.
Chen, W. P., F. T. Tang, et al. (2001). "Stress distribution of the foot during midstance to push-off in barefoot gait: a 3-D finite element analysis." Clin
Biomech (Bristol, Avon) 16(7): 614-20.
Cheung, J. T., M. Zhang, et al. (2005). "Three-dimensional finite element analysis
of the foot during standing--a material sensitivity study." J Biomech 38(5):
1045-54.
Christensen, J. C., H. L. Driscoll, et al. (1994). "Contact characteristics of the
ankle joint. Part 2. The effects of talar dome cartilage defects." J Am
Podiatr Med Assoc 84(11): 537-47.
Cicuttini, F., A. Forbes, et al. (1999). "Gender differences in knee cartilage
volume as measured by magnetic resonance imaging." Osteoarthritis
Cartilage 7(3): 265-71.
Cohen, Z. A., D. M. McCarthy, et al. (1999). "Knee cartilage topography,
thickness, and contact areas from MRI: in-vitro calibration and in-vivo
measurements." Osteoarthritis Cartilage 7(1): 95-109.
Corazza, F., R. Stagni, et al. (2005). "Articular contact at the tibiotalar joint in
passive flexion." J Biomech 38(6): 1205-12.
Cushnaghan, J. and P. Dieppe (1991). "Study of 500 patients with limb joint
osteoarthritis. I. Analysis by age, sex, and distribution of symptomatic joint
sites." Ann Rheum Dis 50(1): 8-13.
240
Davy, D. T., G. M. Kotzar, et al. (1988). "Telemetric force measurements across
the hip after total arthroplasty." J Bone Joint Surg Am 70(1): 45-50.
de Asia, R.J., L. Wan, et al. (2005). "6DOF In-vivo Kinematics of the Ankle Joint
Complex - application of a combined dual-orthogonal fluoroscopic and MR
imaging technique." J Orthop Res Accepted.
de Asia, R.J., L. Wan, et al. (2006). "Six DOF in vivo kinematics of the ankle joint
complex: Application of a combined dual-orthogonal fluoroscopic and
magnetic resonance imaging technique." J Orthop Res 24(5): 1019-27.
DeFrate, L. E., T. J. Gill, et al. (2004). "In vivo function of the posterior cruciate
ligament during weightbearing knee flexion." Am J Sports Med 32(8):
1923-8.
Defrate, L. E., R. Papannagari, et al. (2006). "The 6 degrees of freedom
kinematics of the knee after anterior cruciate ligament deficiency: an in
vivo imaging analysis." Am J Sports Med 34(8): 1240-6.
Defrate, L. E., R. Papannagari, et al. (2006). "The 6 Degrees of Freedom
Kinematics of the Knee After Anterior Cruciate Ligament Deficiency: An In
Vivo Imaging Analysis." Am J Sports Med.
DeFrate, L. E., H. Sun, et al. (2004). "In vivo tibiofemoral contact analysis using
3D MRI-based knee models." J Biomech 37(10): 1499-504.
Defrate, L. E., A. van der Ven, et al. (2006). "The measurement of the variation in
the surface strains of Achilles tendon grafts using imaging techniques." J
Biomech 39(3): 399-405.
241
D'Lima, D. D., S. Patil, et al. (2006). "Tibial forces measured in vivo after total
knee arthroplasty." J Arthroplasty 21(2): 255-62.
Donzelli, P. S., L. M. Gallo, et al. (2004). "Biphasic finite element simulation of
the TMJ disc from in vivo kinematic and geometric measurements." J
Biomech 37(11): 1787-91.
Driscoll, H. L., J. C. Christensen, et al. (1994). "Contact characteristics of the
ankle joint. Part 1. The normal joint." J Am Podiatr Med Assoc 84(10):
491-8.
Eberhardt, A. W., L. M. Keer, et al. (1990). "An analytical model of joint contact."
J Biomech Eng 112(4): 407-13.
Eckstein, F., M. Hudelmaier, et al. (2006). "The effects of exercise on human
articular cartilage." J Anat 208(4): 491-512.
Eckstein, F., B. Lemberger, et al. (2005). "In vivo cartilage deformation after
different types of activity and its dependence on physical training status."
Ann Rheum Dis 64(2): 291-5.
Eckstein, F., B. Lemberger, et al. (2000). "Patellar cartilage deformation in vivo
after static versus dynamic loading." J Biomech 33(7): 819-25.
Eckstein, F., M. Tieschky, et al. (1999). "Functional analysis of articular cartilage
deformation, recovery, and fluid flow following dynamic exercise in vivo."
Anat Embryol (Berl) 200(4): 419-24.
Eckstein, F., M. Tieschky, et al. (1998). "Effect of physical exercise on cartilage
volume and thickness in vivo: MR imaging study." Radiology 207(1): 243-8.
242
Eggli, P. S., E. B. Hunziker, et al. (1988). "Quantitation of structural features
characterizing weight- and less-weight-bearing regions in articular
cartilage: a stereological analysis of medial femoral condyles in young
adult rabbits." Anat Rec 222(3): 217-27.
Engsberg, J. R. (1987). "A biomechanical analysis of the talocalcaneal joint--in
vitro." J Biomech 20(4): 429-42.
Faber, S. C., F. Eckstein, et al. (2001). "Gender differences in knee joint cartilage
thickness, volume and articular surface areas: assessment with
quantitative three-dimensional MR imaging." Skeletal Radiol 30(3): 144-50.
Fetter, N. L., H. A. Leddy, et al. (2006). "Composition and transport properties of
human ankle and knee cartilage." J Orthop Res 24(2): 211-9.
Frank, E. H. and A. J. Grodzinsky (1987). "Cartilage electromechanics--l.
Electrokinetic transduction and the effects of electrolyte pH and ionic
strength." J Biomech 20(6): 615-27.
Frank, E. H. and A. J. Grodzinsky (1987). "Cartilage electromechanics--IIl. A
continuum model of cartilage electrokinetics and correlation with
experiments." J Biomech 20(6): 629-39.
Fukubayashi, T. and H. Kurosawa (1980). "The contact area and pressure
distribution pattern of the knee. A study of normal and osteoarthritic knee
joints." Acta Orthop Scand 51(6): 871-9.
Gage, J. R., P. A. Deluca, et al. (1995). "Gait analysis: principles and
applications." J Bone Joint Surg Am 77(10): 1607-23.
243
Graichen, H., J. Jakob, et al. (2003). "Validation of cartilage volume and
thickness measurements in the human shoulder with quantitative
magnetic resonance imaging." Osteoarthritis Cartilage 11(7): 475-82.
Graves, S. C., R. A. Mann, et al. (1993). "Triple arthrodesis in older adults.
Results after long-term follow-up." J Bone Joint Surg Am 75(3): 355-62.
Greco, F., N. Specchia, et al. (1992). "Ultrastructural analysis of the adaptation of
articular cartilage to mechanical stimulation." Ital J Orthop Traumatol 18(3):
311-21.
Greenwald, A. S., M. B. Matejczyk, et al. (1976). "Preliminary observations on the
weight-bearing surfaces of the human ankle joint." Surg Forum 27(62):
505-6.
Guilak, F., A. Ratcliffe, et al. (1994). "Mechanical and biochemical changes in the
superficial zone of articular cartilage in canine experimental osteoarthritis."
J Orthop Res 12(4): 474-84.
Han, S. K., S. Federico, et al. (2005). "An articular cartilage contact model based
on real surface geometry." J Biomech 38(1): 179-84.
Hanson, G. R., J. F. Suggs, et al. (2005). "Investigate of in vivo 6DOF TKA
kinematics using a dual orthogonal fluoroscopic system." J Orthop Res
Accepted.
Hanson, G. R., J. F. Suggs, et al. (2006). "Investigation of in vivo 6DOF total
knee arthoplasty kinematics using a dual orthogonal fluoroscopic system."
J Orthop Res 24(5): 974-81.
244
Hayes, W. C. and L. F. Mockros (1971). "Viscoelastic properties of human
articular cartilage." J Appl Physiol 31(4): 562-8.
Herberhold, C., S. Faber, et al. (1999). "In situ measurement of articular cartilage
deformation in intact femoropatellar joints under static loading." J Biomech
32(12): 1287-95.
Herberhold, C., T. Stammberger, et al. (1998). "An MR-based technique for
quantifying the deformation of articular cartilage during mechanical loading
in an intact cadaver joint." Magn Reson Med 39(5): 843-50.
Hirokawa, S. (1991). "Three-dimensional mathematical model analysis of the
patellofemoral joint." J Biomech 24(8): 659-71.
Hirsch, B. E., J. K. Udupa, et al. (1989). "Three-dimensional reconstruction of the
foot from computed tomography scans." J Am Podiatr Med Assoc 79(8):
384-94.
Hirsch, B. E., J. K. Udupa, et al. (1996). "New method of studying joint kinematics
from three-dimensional reconstructions of MRI data." J Am Podiatr Med
Assoc 86(1): 4-15.
Hirsch, B. E., J. K. Udupa, et al. (2000). "Tarsal joint kinematics via 3D imaging."
Crit Rev Diagn Imaging 41(6): 403-49.
Hodge, W. A., K. L. Carlson, et al. (1989). "Contact pressures from an
instrumented hip endoprosthesis." J Bone Joint Surg Am 71(9): 1378-86.
Hodge, W. A., R. S. Fijan, et al. (1986). "Contact pressures in the human hip joint
measured in vivo." Proc Natl Acad Sci U S A 83(9): 2879-83.
245
Horii, E., M. Garcia-Elias, et al. (1990). "Effect on force transmission across the
carpus in procedures used to treat Kienbock's disease." J Hand Surg [Am]
15(3): 393-400.
Hwang, W. S., B. Li, et al. (1992). "Collagen fibril structure of normal, aging, and
osteoarthritic cartilage." J Pathol 167(4): 425-33.
Jacob, S. and M. K. Patil (1999). "Stress analysis in three-dimensional foot
models of normal and diabetic neuropathy." Front Med Biol Eng 9(3): 21127.
Jaremko, J. L., R. W. Cheng, et al. (2006). "Reliability of an efficient MRI-based
method for estimation of knee cartilage volume using surface registration."
Osteoarthritis Cartilage.
Karrholm, J., L. i. Hansson, et al. (1985). "Mobility of the lateral malleolus. A
roentgen stereophotogrammetric analysis." Acta Orthop Scand 56(6): 47983.
Kepple, T. M., S. J. Stanhope, et al. (1990). "A video-based technique for
measuring ankle-subtalar motion during stance." J Biomed Eng 12(4):
273-80.
Kimizuka, M., H. Kurosawa, et al. (1980). "Load-bearing pattern of the ankle joint.
Contact area and pressure distribution." Arch Orthop Trauma Surg 96(1):
45-9.
Kitaoka, H. B., A. Lundberg, et al. (1995). "Kinematics of the normal arch of the
foot and ankle under physiologic loading." Foot Ankle Int 16(8): 492-9.
246
Kitaoka, H. B., Z. P. Luo, et al. (1997). "Three-dimensional analysis of normal
ankle and foot mobility." Am J Sports Med 25(2): 238-42.
Kitaoka, H. B. and G. L. Patzer (1996). "Clinical results of the Mayo total ankle
arthroplasty." J Bone Joint Surg Am 78(11): 1658-64.
Kotnis, R., C. Pasapula, et al. (2006). "The management of failed ankle
replacement." J Bone Joint Surg Br 88(8): 1039-47.
Krasnokutsky, S., J. Samuels, et al. (2007). "Osteoarthritis in 2007." Bull NYU
Hosp Jt Dis 65(3): 222-8.
Kura, H., H. B. Kitaoka, et al. (1998). "Measurement of surface contact area of
the ankle joint." Clin Biomech (Bristol, Avon) 13(4-5): 365-370.
Lachiewicz, P. F. (1994). "Total ankle arthroplasty. Indications, techniques, and
results." Orthop Rev 23(4): 315-20.
Lai, W. M., V. C. Mow, et al. (1981). "Effects of nonlinear strain-dependent
permeability and rate of compression on the stress behavior of articular
cartilage." J Biomech Eng 103(2): 61-6.
Leardini, A., J. J. O'Connor, et al. (1999). "Kinematics of the human ankle
complex in passive flexion; a single degree of freedom system." J
Biomech 32(2): 111-8.
Leardini, A., R. Stagni, et al. (2001). "Mobility of the subtalar joint in the intact
ankle complex." J Biomech 34(6): 805-9.
Lewis, G. (1994). "The ankle joint prosthetic replacement: clinical performance
and research challenges." Foot Ankle Int 15(9): 471-6.
247
Li, G., L. E. DeFrate, et al. (2005). "In vivo articular cartilage contact kinematics
of the knee: an investigation using dual-orthogonal fluoroscopy and
magnetic resonance image-based computer models." Am J Sports Med
33(1): 102-7.
Li, G., L. E. Defrate, et al. (2005). "In vivo kinematics of the ACL during weightbearing knee flexion." J Orthop Res 23(2): 340-4.
Li, G., L. E. DeFrate, et al. (2004). "In vivo elongation of the anterior cruciate
ligament and posterior cruciate ligament during knee flexion." Am J Sports
Med 32(6): 1415-20.
Li, G., J. Gil, et al. (1999). "A validated 3-dimensional computational model of a
human knee joint." J Biomech. Eng. 121: 657-662.
Li, G., O. Lopez, et al. (2001). "Variability of a three-dimensional finite element
model constructed using magnetic resonance images of a knee for joint
contact stress analysis." J Biomech Eng 123(4): 341-6.
Li, G., J. M. Moses, et al. (2006). "Anterior cruciate ligament deficiency alters the
in vivo motion of the tibiofemoral cartilage contact points in both the
anteroposterior and mediolateral directions." J Bone Joint Surg Am 88(8):
1826-34.
Li, G., E. Most, et al. (2004). "Knee kinematics with a high-flexion posterior
stabilized total knee prosthesis: an in vitro robotic experimental
investigation." J Bone Joint Surg Am 86-A(8): 1721-9.
248
Li, G., S. E. Park, et al. (2005). "The cartilage thickness distribution in the
tibiofemoral joint and its correlation with cartilage-to-cartilage contact." Clin
Biomech (Bristol, Avon) 20(7): 736-44.
Li, G., M. Sakamoto, et al. (1997). "A comparison of different methods in
predicting static pressure distribution in articulating joints." J Biomech
30(6): 635-8.
Li, G., L. Wan, et al. (2007). "Determination of real-time in-vivo cartilage contact
deformation in the ankle joint." J Biomech In Press.
Li, G., L. Wan, et al. (2008). "Determination of Real Time In-vivo Cartilage
Contact Deformation in the Ankle Joint." Journal of Biomechanics 41(1):
128-136.
Li, G., T. H. Wuerz, et al. (2004). "Feasibility of using orthogonal fluoroscopic
images to measure in vivo joint kinematics." J Biomech Eng 126(2): 314-8.
Li, L. P. and W. Herzog (2004). "The role of viscoelasticity of collagen fibers in
articular cartilage: theory and numerical formulation." Biorheology 41(3-4):
181-94.
Linn, F. C. and L. Sokoloff (1965). "Movement and Composition of Interstitial
Fluid of Cartilage." Arthritis Rheum 8: 481-94.
Lipshitz, H., R. Etheredge, 3rd, et al. (1975). "In vitro wear of articular cartilage."
J Bone Joint Surg Am 57(4): 527-34.
Llinas, A., H. A. McKellop, et al. (1993). "Healing and remodeling of articular
incongruities in a rabbit fracture model." J Bone Joint Surg Am 75(10):
1508-23.
249
Lu, T. W., S. J. Taylor, et al. (1997). "Influence of muscle activity on the forces in
the femur: an in vivo study." J Biomech 30(11-12): 1101-6.
Lundberg, A. (1989). "Kinematics of the ankle and foot. In vivo roentgen
stereophotogrammetry." Acta Orthop Scand Suppl 233: 1-24.
Lundberg, A., I. Goldie, et al. (1989). "Kinematics of the ankle/foot complex:
plantarflexion and dorsiflexion." Foot Ankle 9(4): 194-200.
Lundberg, A., O. K. Svensson, et al. (1989). "Kinematics of the ankle/foot
complex--Part 2: Pronation and supination." Foot Ankle 9(5): 248-53.
Lundberg, A., O. K. Svensson, et al. (1989). "Kinematics of the ankle/foot
complex--Part 3: Influence of leg rotation." Foot Ankle 9(6): 304-9.
Lundberg, A., O. K. Svensson, et al. (1989). "The axis of rotation of the ankle
joint." J Bone Joint Surg Br 71(1): 94-9.
Maroudas, A., P. Bullough, et al. (1968). "The permeability of articular cartilage."
J Bone Joint Surg Br 50(1): 166-77.
Maroudas, A. and R. Schneiderman (1987). ""Free" and "exchangeable" or
"trapped" and "non-exchangeable" water in cartilage." J Orthop Res 5(1):
133-8.
Mattingly, B., V. Talwalkar, et al. (2006). "Three-dimensional in vivo motion of
adult hind foot bones." J Biomech 39(4): 726-33.
Mattingly, B., Talwalkar, V.,
Tylkowski, Stevens, D.B.
, Hardy, P.A.,
Pienkowski,D. (In Press). "Three-dimensional in vivo motion of adult hind
foot bones." Journal of Biomechanics.
250
McGibbon, C. A., J. Bencardino, et al. (2003). "Accuracy of cartilage and
subchondral bone spatial thickness distribution from MRI." J Magn Reson
Imaging 17(6): 703-15.
McGibbon, C. A., D. E. Dupuy, et al. (1998). "Cartilage and subchondral bone
thickness distribution with MR imaging." Acad Radiol 5(1): 20-5.
Michelson, J. D., M. Checcone, et al. (2001). "Intra-articular load distribution in
the human ankle joint during motion." Foot Ankle Int 22(3): 226-33.
Moseley, L., R. Smith, et al. (1996). "Three-dimensional kinematics of the
rearfoot during the stance phase of walking in normal young adult males."
Clin Biomech (Bristol, Avon) 11(1): 39-45.
Mow, V. C., M. C. Gibbs, et al. (1989). "Biphasic indentation of articular cartilage-I1.A numerical algorithm and an experimental study." J Biomech 22(8-9):
853-61.
Mow, V. C., M. H. Holmes, et al. (1984). "Fluid transport and mechanical
properties of articular cartilage: a review." J Biomech 17(5): 377-94.
Mow, V. C., S. C. Kuei, et al. (1980). "Biphasic creep and stress relaxation of
articular cartilage in compression? Theory and experiments." J Biomech
Eng 102(1): 73-84.
Mow, V. C. and W. M. Lai (1974). "Some surface characteristics of articular
cartilage. I. A scanning electron microscopy study and a theoretical model
for the dynamic interaction of synovial fluid and articular cartilage." J
Biomech 7(5): 449-56.
251
Mow, V. C., A. Ratcliffe, et al. (1992). "Cartilage and diarthrodial joints as
paradigms for hierarchical materials and structures." Biomaterials 13(2):
67-97.
Naish, J. H., E. Xanthopoulos, et al. (2006). "MR measurement of articular
cartilage thickness distribution in the hip." Osteoarthritis Cartilage.
Nakanishi, K., H. Tanaka, et al. (1999). "MR evaluation of the articular cartilage
of the femoral head during traction. Correlation with resected femoral
head." Acta Radiol 40(1): 60-3.
Nigg, B. M., V. Fisher, et al. (1992). "Range of motion of the foot as a function of
age." Foot Ankle 13(6): 336-43.
Nishii, T., K. Nakanishi, et al. (1998). "Articular cartilage evaluation in
osteoarthritis of the hip with MR imaging under continuous leg traction."
Magn Reson Imaging 16(8): 871-5.
Nishii, T., N. Sugano, et al. (2004). "Three-dimensional distribution of acetabular
cartilage thickness in patients with hip dysplasia: a fully automated
computational analysis of MR imaging." Osteoarthritis Cartilage 12(8):
650-7.
Nuber, G. W. (1988). "Biomechanics of the foot and ankle during gait." Clin
Sports Med 7(1): 1-13.
Parenteau, C. S., D. C. Viano, et al. (1998). "Biomechanical properties of human
cadaveric ankle-subtalar joints in quasi-static loading." J Biomech Eng
120(1): 105-11.
252
Park, S. and G. A. Ateshian (2006). "Dynamic response of immature bovine
articular cartilage in tension and compression, and nonlinear viscoelastic
modeling of the tensile response." J Biomech Eng 128(4): 623-30.
Pereira, D. S., K. J. Koval, et al. (1996). "Tibiotalar contact area and pressure
distribution: the effect of mortise widening and syndesmosis fixation." Foot
Ankle Int 17(5): 269-74.
Peterfy, C. G., C. F. van Dijke, et al. (1994). "Quantification of articular cartilage
in the knee with pulsed saturation transfer subtraction and fat-suppressed
MR imaging: optimization and validation." Radiology 192(2): 485-91.
Piplani, M. A., D. G. Disler, et al. (1996). "Articular cartilage volume in the knee:
semiautomated determination from three-dimensional reformations of MR
images." Radiology 198(3): 855-9.
Plochocki, J. H., C. J. Riscigno, et al. (2006). "Functional adaptation of the
femoral head to voluntary exercise." Anat Rec A Discov Mol Cell Evol Biol.
Potter, H. G. and L. F. Foo (2006). "Magnetic resonance imaging of articular
cartilage: trauma, degeneration, and repair." Am J Sports Med 34(4): 66177.
Prendergast, P. J., W. D. van Driel, et al. (1996). "A comparison of finite element
codes for the solution of biphasic poroelastic problems." Proc Inst Mech
Eng [H] 210(2): 131-6.
Procter, P. and J. P. Paul (1982). "Ankle joint biomechanics." J Biomech 15(9):
627-34.
253
Ramsey, P. L. and W. Hamilton (1976). "Changes in tibiotalar area of contact
caused by lateral talar shift." J Bone Joint Surg Am 58(3): 356-7.
Redler, I. and M. L. Zimny (1970). "Scanning electron microscopy of normal and
abnormal articular cartilage and synovium." J Bone Joint Surg Am 52(7):
1395-404.
Reinschmidt, C., A. J. van Den Bogert, et al. (1997). "Tibiocalcaneal motion
during running, measured with external and bone markers." Clin Biomech
(Bristol, Avon) 12(1): 8-16.
Reinschmidt, C., van den Bogert,A. J., Lundberg, A., Nigg, B.M., Murphy, Stacoff,
A., Stano, A. (1997). "Tibiofemoral and tibiocalcaneal motion during
walking: external vs. skeletal markers." Gait and Posture 6: 98-109.
Renstrom, P., M. Wertz, et al. (1988). "Strain in the lateral ligaments of the
ankle." Foot Ankle 9(2): 59-63.
Rohlmann, A., G. Bergmann, et al. (1995). "Telemeterized load measurement
using instrumented spinal internal fixators in a patient with degenerative
instability." Spine 20(24): 2683-9.
Roth, V. and V. C. Mow (1980). "The intrinsic tensile behavior of the matrix of
bovine articular cartilage and its variation with age." J Bone Joint Surg Am
62(7): 1102-17.
Rubenstein, J. D., J. K. Kim, et al. (1996). "Effects of compression and recovery
on bovine articular cartilage: appearance on MR images." Radiology
201(3): 843-50.
254
Salter, D. M., S. J. Millward-Sadler, et al. (2002). "Differential responses of
chondrocytes from normal and osteoarthritic human articular cartilage to
mechanical stimulation." Biorheology 39(1-2): 97-108.
Saltzman, C. L., M. J. Fehrle, et al. (1999). "Triple arthrodesis: twenty-five and
forty-four-year average follow-up of the same patients." J Bone Joint Surg
Am 81(10): 1391-402.
Schuind, F., W. P. Cooney, et al. (1995). "Force and pressure transmission
through the normal wrist. A theoretical two-dimensional study in the
posteroanterior plane." J Biomech 28(5): 587-601.
Scott, S. H. and D. A. Winter (1991). "Talocrural and talocalcaneal joint
kinematics and kinetics during the stance phase of walking." J Biomech
24(8): 743-52.
Selvik, G., P. Alberius, et al. (1983). "A roentgen stereophotogrammetric system.
Construction, calibration and technical accuracy." Acta Radiol Diagn
(Stockh) 24(4): 343-52.
Shepherd, D. E. and B. B. Seedhom (1999). "Thickness of human articular
cartilage in joints of the lower limb." Ann Rheum Dis 58(1): 27-34.
Siegler, S., J. Chen, et al. (1988). "The three-dimensional kinematics and
flexibility characteristics of the human ankle and subtalar joints--Part I:
Kinematics." J Biomech Eng 110(4): 364-73.
Siegler, S., J. K. Udupa, et al. (2005). "Mechanics of the ankle and subtalar joints
revealed through a 3D quasi-static stress MRI technique." J Biomech
38(3): 567-78.
255
Soslowsky, L. J., E. L. Flatow, et al. (1992). "Quantitation of in situ contact areas
at the glenohumeral joint: a biomechanical study." J Orthop Res 10(4):
524-34.
Spilker, R. L., J. K. Suh, et al. (1988). "A finite element formulation of nonlinear
biphasic model for articular cartilage and hydrated soft tissues including
strain-dependent permeability." Computational methods in bioengineering.
Stammberger, T., F. Eckstein, et al. (1999). "Determination of 3D cartilage
thickness
data
from
MR
computational
imaging:
method
and
reproducibility in the living." Magn Reson Med 41(3): 529-36.
Steffensmeier, S. J., C. L. Saltzman, et al. (1996). "Effects of medial and lateral
displacement calcaneal osteotomies on tibiotalar joint contact stresses." J
Orthop Res 14(6): 980-5.
Stockwell, R. A. (1967). "The cell density of human articular and costal cartilage."
J Anat 101(Pt 4): 753-63.
Stockwell, R. A. (1978). "Chondrocytes." J Clin Pathol Suppl (R Coil Pathol) 12:
7-13.
Stockwell, R. S. (1979). "Biology of Cartilage Cells." Cambridge, Cambridge
University Press.
Stormont, T. J., K. N. An, et al. (1985). "Elbow joint contact study: comparison of
techniques." J Biomech 18(5): 329-36.
Szafranski,
J.
D.,
A.
mechanotransduction:
J.
Grodzinsky,
effects
of
256
et
al.
compression
(2004).
on
"Chondrocyte
deformation
of
intracellular
organelles
and
relevance
to
cellular
biosynthesis."
Osteoarthritis Cartilage 12(12): 937-46.
Tan, T. C., D. M. Wilcox, et al. (1996). "MR imaging of articular cartilage in the
ankle: comparison of available imaging sequences and methods of
measurement in cadavers." Skeletal Radiol 25(8): 749-55.
Tarr, R. R., C. T. Resnick, et al. (1985). "Changes in tibiotalar joint contact areas
following experimentally induced tibial angular deformities." Clin Orthop
Relat Res 199: 72-80.
Taylor, S. J. and P. S. Walker (2001). "Forces and moments telemetered from
two distal femoral replacements during various activities." J Biomech 34(7):
839-48.
Thermann, H., T. Hufner, et al. (1999). "Long-term results of subtalar fusions
after operative versus nonoperative treatment of os calcis fractures." Foot
Ankle Int 20(7): 408-16.
Ting, A. J., R. R. Tarr, et al. (1987). "The role of subtalar motion and ankle
contact pressure changes from angular deformities of the tibia." Foot
Ankle 7(5): 290-9.
Treppo, S., H. Koepp, et al. (2000). "Comparison of biomechanical and
biochemical properties of cartilage from human knee and ankle pairs." J
Orthop Res 18(5): 739-48.
van der Voet, A. (1997). "A comparison of finite element codes for the solution of
biphasic poroelastic problems." Proc Inst Mech Eng [H] 211(2): 209-11.
257
van der Voet, A. F., N. G. Shrive, et al. (1993). "Numerical modelling of articular
cartilage in synovial joints-poroelasticity and boundary conditions."
Computer methods in biomechanics and biomedical engineering: 200-209.
van Langelaan, E. J. (1983). "A kinematical analysis of the tarsal joints. An X-ray
photogrammetric study." Acta Orthop Scand Suppl 204: 1-269.
Vignon, E., J. P. Valat, et al. (2006). "Osteoarthritis of the knee and hip and
activity: a systematic international review and synthesis (OASIS)." Joint
Bone Spine.
Wagner, K. S., R. R. Tarr, et al. (1984). "The effect of simulated tibial deformities
on the ankle joint during the gait cycle." Foot Ankle 5(3): 131-41.
Walter, J. H., Jr. and A. Spector (1991). "Traumatic osteoarthrosis of the ankle
joint secondary to ankle fractures." J Am Podiatr Med Assoc 81(8): 399405.
Wan, L., R. J. de Asia, et al. (2006). "Determination of in-vivo articular cartilage
contact areas of human talocrural joint under weightbearing conditions."
Osteoarthritis Cartilage 14(12): 1294-301.
Wan, L., R. J. de Asia, et al. (2007). "In vivo cartilage contact deformation of
human ankle joints under full body weight." Journal of Orthopaedic
Research In Press.
Waterton, J. C., S. Solloway, et al. (2000). "Diurnal variation in the femoral
articular cartilage of the knee in young adult humans." Magn Reson Med
43(1): 126-32.
258
Weiss, C., L. Rosenberg, et al. (1968). "An ultrastructural study of normal young
adult human articular cartilage." J Bone Joint Surg Am 50(4): 663-74.
Westblad, P., T. Hashimoto, et al. (2002). "Differences in ankle-joint complex
motion during the stance phase of walking as measured by superficial and
bone-anchored markers." Foot Ankle Int 23(9): 856-63.
Wilke, H. J., P. Neef, et al. (1999). "New in vivo measurements of pressures in
the intervertebral disc in daily life." Spine 24(8): 755-62.
Woo, S. L., B. R. Simon, et al. (1980). "Quasi-linear viscoelastic properties of
normal articular cartilage." J Biomech Eng 102(2): 85-90.
Wu, J. Z. and W.Herzog (2000). "Finite element simulation of location- and timedependent mechanical
behavior of chondrocytes in unconfined
compression tests." Ann Biomed Eng 28(3): 318-30.
Wu, J. Z. and W. Herzog (2006). "Analysis of the mechanical behavior of
chondrocytes in unconfined compression tests for cyclic loading." J
Biomech 39(4): 603-16.
Wu, J. Z., W. Herzog, et al. (1998). "Evaluation of the finite element software
ABAQUS for biomechanical modelling of biphasic tissues." J Biomech
31(2): 165-9.
Wu, J. Z., W. Herzog, et al. (1999). "Modelling of location- and time-dependent
deformation of chondrocytes during cartilage loading." J Biomech 32(6):
563-72.
259