Generic Exception Analysis in a Dynamic
Multi-Agent Environment
by
Zhi-Hui (Winifred) Xu
Submitted to the Department of Electrical Engineering and Computer Science
in Partial Fulfillment of the Requirements for the Degree of
Bachelor of Science in Computer Science and Engineering and
Master of Engineering in Electrical Engineering and Computer Science
ENG
at the MASSACHUSETTS INSTITUTE OF TECHNOLOGY
,
MASSA CHUSETTS INSTITUTE
OF TECHNOLOGY
May 21,1999
JUL 2 7 2000
© 1999 Zhi-Hui Xu. All rights Reserved.
LIBRARIES
The author hereby grants to M.I.T. permission to reproduce and
distribute publicly paper and electronic copies of this thesis
and to grant others the right to do so.
Author
Department of Electrical Engineering and Computer Science
May 21, 1999
Certified by
I
Prof. Howard E. Shrobe
Thesis Supervisor
Accepted by
Arthur C. Smith
Chairman, Department Committee on Graduate Theses
Generic Exception Analysis in a Dynamic
Multi-Agent Environment
by
Zhi-Hui (Winifred) Xu
Submitted to the
Department of Electrical Engineering and Computer Science
Massachusetts Institute of Technology
May 21, 1999
In Partial Fulfillment of the Requirements for the Degree of
Bachelor of Science in Computer Science and Engineering and
Master of Engineering in Electrical Engineering and Computer Science
ABSTRACT
In a dynamic real world environment, autonomous agents need to be well coordinated in
order to be able to execute their mission successfully together. To ease the burden on
individual agent's ability to handle errors and unforeseen circumstances, Dr. Dellarocas
and Dr. Klein is working on a Generic Exception handling (EH) architecture called the
"Good Citizen" approach, where the EH capabilities are external to the local agents. This
EH acts as a "doctor" for all the agents in the "society". For this thesis, specific protocols
TeamCore and Socially Attentive Monitoring (SAM) designed by Dr. Milind Tambe's
group in ISI of USC are studied and analyzed. Results will be represented in the
exception taxonomy at CCS to
evaluate the ability of the current "good citizen" architecture to capture the exception
handling components of the ISI protocols, and expand the existing knowledge base of
generic exceptions and its anticipation, detection, prevention and repair methods.
Thesis Supervisors:
Prof. Chrysanthos Dellarocas
Title: Assistant Professor, MIT Sloan School of Management
Dr. Mark Klein
Title: Research Associate, MIT Center for Coordination Sciences
Prof. Howard E. Shrobe
Title: Associate Director, MIT Artificial Intelligence Lab
2
Acknowledgments:
Time sure flies, today, I finally completed my Master of Engineering Thesis, and have
officially graduated from MIT (Massachusetts Institute of Technology), the place where I have
spent the past 5 years learning, "tooling", growing, and maturing. The person that I owe my
entire life to is my dearest mother, who is happy with tears at this moment as she hears the good
news. All of this would not have been possible her, who worked so hard to raise and educate me.
Mom, I love you very very much!
She loves me more then her own dear life,
I would like to give thanks to those who helped and guided me through my five years of
tedious yet fun times at MIT. First of all, my deepest gratitude goes to Prof. Chris Dellarocas
and Dr. Mark Klein for their support and supervision throughout this term, and thanks for giving
me the opportunity to work on this project. Many thanks to Prof. Howard Shrobe and Prof.
Patrick Winston who helped me in defining my thesis and focusing on my goal.
To my close friends @ MIT: Florence, Cathy, Sabrina, Clare, and many others have
given me support and encouragement, thanks for lending your ears. Life would have been boring
without your friendships. I will miss the happy moments where we hangout at the food trucks,
Au Bon Pain, W20 lounge, 500 Memorial Dr. (Next House), pulling all-nighters, all of this has
come to an end and will eventually pay off.
To my friends from CBCGB (CBF/ICF/CCharis), thank you very much for your prayers
and support. I've grown so much spiritually while attending Lexington church. Your kindness
have touched me deeply, and I will always remember the wonderful times we spent together, and
the Michael W. Smith's song -- "Friends".
"And friends are friends forever
If the Lord's the Lord of them.
And a friend will not say "never"
'Cause the welcome will not end."
--Michael W. Smith "Friends"
Lastly, to those friends who have encouraged me and visited me from NYC, Thank you
and keep in touch!
All of this is done through the grace of God the Almighty, who showered me with so
many blessings, loved me and carried me on his shoulders throughout the years. Thank you,
Lord, my Heavenly Father. Amen!
Dream what you want to dream;
Go where you want to go;
Be what you want to be;
Because you have only one life and
One chance to do *all* the things you want to do!
3
Table of Contents
ABSTRACT
2
Acknowledgments:
3
Chapter1:
5
1.1). Dynamic environment causes troubled agents
5
1.2). "Survivalist" approach to exception handling
6
7
"Survivalist" agent approach:
1.3). The "Good Citizen" Approach - Social Monitoring
Social Monitoring:
Good Citizen Approach:
8
8
10
11
1.4). Thesis focus and outline
13
Chapter2:
2.1.1). TeamCore Protocol:
13
2.1.2). Joint Intention Theory
13
2.1.3). Shared Plan Theory
14
2.1.4). Establish JPG
15
2.1.5). Monitor and Repair
16
2.1.6). Selective Communication
17
22
Chapter 3:
22
3.1). Socially Attentive Monitor (SAM)
Chapter4:
24
24
4.1). Exception Handling Template:
25
25
27
27
34
37
EH entry template
Reference
For each exception type
For each handler
For every meta-process
For every meta-process
Chapter 5:
39
5.1). Comparison to the Good Citizen's Architecture
39
5.2). Table listing the comparison between TeamCore and Good Citizen
42
44
Chapter 6:
44
6.1). Future Direction:
45
References:
4
Chapter 1:
1.1). Dynamic environment causes troubled agents
Through out humanity's search for the perfect adaptation of a dynamic agent
society, where autonomous agents with different capabilities can come together and freely
interact to accomplish useful tasks, exception handling has been one of the biggest
obstacles in achieving that goal. Agents being designed in lab can rarely handle the entire
array of possible exceptions caused by the changing environment. Each agent may be the
expert in their particular field, however, together, they lack the overall comprehension to
deal with the numerous unforeseen situations outside of their specific knowledge realm.
("society of mind", Minsky) Thus the desire to construct a useful agent society such that
it functions in a similar fashion as the human society has not yet been completely
fulfilled. Especially with team tasks, the difficulty encountered in assembling a team,
delivery of instructions, and carry out the tasks together while each agent has an assigned
role is enormous.
Software agents have been employed in numerous complex and uncertain
environments such as virtual training programs, military applications, space missions.
Ensuring the successful completion of a task or the capability to learn from failures to
prevent future repeats is critical to agent designers. Autonomous agents running in
dynamic environments can encounter numerous unforeseen situations that may cause
them to fail to accomplish their goals. Errors can appear from both within and without
the agent/protocol. Unanticipated changes in the scenario setting can lead to confusion,
agent dependence relationships could cause chain-reaction failures (consumer-producer
relationships), and other forgotten variables can all generate exceptions. Unhandled
exception can further trigger other undesired systemic problems (network clog, resource
contention, dead-lock, etc.).
The most obvious one is the error in agent/protocol design. An agent can
suddenly go wild and make a wrong decision, such as a calculation error, judgment
5
errors, or sensor failures. The protocol implemented could have intrinsic design flaws,
such as logic bugs, or just failure due to designer's overlooking certain things. This type
of failure is easy to detect and resolve. These can be tested at design time. Once it
surfaces in a trial run (or maybe debugging stage), the design flaw will soon expose it
self. The detection of the error is simple to implement because we can just check for the
deviation from normal behavior path, and resolution mechanism is even simpler.
The second type is due to hardware or environmental failures. An agent can be
missing in action (MIA) while collaborating with a team; an electrical outage can cause
many grievances. This is usually outside of the control of the implementers, it's not an
intrinsic fault inside the architecture of the agent/protocol; yet, it can be anticipated, and
exception handlers can be written into the agent's code to prevent/repair such errors.
The last type of exceptions are the "emergent exceptions". Though similar to the
second type of error that they occur unexpectedly at run time. These are not due to the
fault in the design of the agent or protocol, but rather due to unforeseen circumstances.
Exceptions such as resource contingencies, or dead/live locks, or message congestion.
Usually in a dynamic "open" agent environment, due to the participation of the myriad
types of agents, the heterogeneity of the agent types can cause subtle interaction errors.
The occurrence of these exceptions are not predictable at design time, and thus very hard
to avoid. Smart implementers can try to picture the scenarios and then place monitors
that watch out for the signs of these errors, thus able to prevent or repair later.
1.2). "Survivalist"approach to exception handling
In the engineering world, one of the popular practices for developers is to try to
simplify the agent world in order to ease design time complexity. Thus they try to
envision the agent environment to be a concrete man-made environment with a few
variables and almost perfect settings. Traditional exception handling had always been a
subtask after the majority of the main functionalities have been implemented. Designers
6
would try to anticipate an array of possible errors that the agent can generate from its own
actions, plus a few of the possible environmental variables. While this may be relatively
sufficient to ensure successful task completion in a single agent / isolated mechanical
world, it is prone to numerous failures in an ensemble of agents involved in team work.
Attempts have been made to anticipate possible failures at design time, and then
hard code exception handlers into the individual agent applications; thus extensive
amount of efforts has been spent on the prediction and prevention of possible errors. For
each individual application agent, this kind of effort is tremendous.
"Survivalist" agent approach:
A great deal of efforts has been spent in trying to resolve these issues, amongst
them were focuses on single agent architecture with various reactive plans (open agent
protocol); or other decision making algorithms. Still others chose to focus on improving
the dynamic environments that agents are working in, so to handle many coordination
issues at the higher layer.
One of the most popular approach is a "Survivalist" agent. This is an instance of
the Distributed "self-check" method. After all, the agents have direct access to its own
internal state information and the necessary data used in the comparison. Designers chose
to incorporate as many situations as possible into the exception handling section of the
individual agent. This would require that individual agent to have fairly sophisticated
reasoning capabilities, a very "paranoid" set of checking conditions, plus heavy code to
deal with each and everyone of them. And anything forgotten is a potential loop hole for
failure while on mission. The one advantage of this method is that individual agents
knows what they are looking for, have access to internal state values, and the designers
can easily set standards for the local situation. However, the complexity in the code for
the agent grows quickly, and they usually are difficult to understand or maintain, code for
agents built with compiled in exception handling are not as reusable, and the state
7
relationships becoming so convoluted. Also, it's unrealistic to expect that all agents
participating in a team will have the same exception handling capabilities, thus seriously
limits the amount of cooperation and interactions available to all.
However, in a multi-agent environment, this "survivalist" approach may not
survive very well, due to the potential endless amount of errors simply caused by the
diverse set of agents interacting with each other. Agent teams built on such "survivalist"
agent infrastructures will lack in the following aspects:
+ Team construction - lots of domain dependent work requires huge amounts of human
effort, and domain dependent information are not reusable for other domains.
+ Team flexibility - when faced with uncertain situations, agents need a teamwork
model to deal with unforeseen situations, to facilitate the coordination and
collaboration.
+ Team Scale-up - limited resources and huge human efforts in trying to predict the
error s and program in the exception handlers.
+ Learning ability - repeated failure should be avoided, but since agents cannot reason,
thus they cannot learn from past failure experiences.
1.3). The "Good Citizen" Approach - Social Monitoring
Social Monitoring:
In contrast to the self-checking mechanism, human society has implemented a
concept called "monitoring". Institutes like the police are specifically designated to
watch all the wrong doings happening in the society. And they are the ones responsible
of detection and repair. This is convenient because we are alleviating the heavy burden o F
monitoring off the shoulders of each participant in the society. We empower the police to
pay attention to a common set of standards they we believe everyone should obey. Also
give them the responsibility and authority to deal with exceptions when they do arise.
Similarly in the agent world, the common facilities such as network congestion, resource
8
poaching can be the focus of all agent's attention, thus it's wise to ask other "policing"
agents to monitor and resolve when errors arise in those situations. A policing agent
monitors the behavior of an individual agent or a team (which may include itself),
detecting and diagnosing failures as they occur.
The big advantage of this type of "social policing" over the "self-checking" is
that we can save all the redundant effort and spend it on one particular monitor. The
designer for the "society" is the one responsible for predicting the needs and writing the
exception handling devices for this type of common interest failures. And we can give
those exception handlers the power to repair the situation, where we can't possibly entrust
them with individual local agents.
On the other hand, direct access to the monitored agent's internal states are not
easily accessible now. It is virtually impossible and also unfeasible for agents to
continuously communicate its internal states to the monitoring agent due to reasons such
as communication cost, privacy safety, etc.
However, interaction amongst agents complicate the task of the monitor. It now
has to consider interaction between the agent-environment and also agent-agent
communications. In addition, failures in interaction between an agent and the
environment affect its interactions with other agents. Since only individual agent knows
what kind of values it is expecting and what type of logical calculations its responsible
for, it would be hard for the social police to be able to incorporate all of the variables and
realize which values to check for. Programming the social monitor to suite domain
requirements can be very tedious and time consuming for the implementers.
9
Good Citizen Approach:
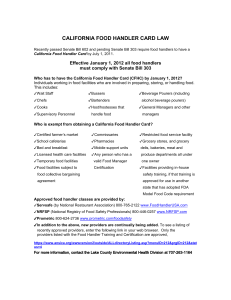
The "Good Citizen" approach is one instance of the "social monitoring" method.
This is currently under research at CCS (Center for Coordination Sciences) at MIT. This
shared exception handling service is designed to be easily "plugged" into existing agent
systems with little customization. This handler acts as a "doctor", which looks systemwide for "diseases" (exceptions), and tries to fix them as soon as any is detected. The
"doctor" also possesses knowledge about the various types of exceptions and the myriad
ways of fixes because it has an exception taxonomy database at easy reach. This provides
an abstraction level that alleviates the individual agents of the exception handling
abilities, and transfers the worries to the "doctor", who is now the expert in exception
handling area due to its vast database of "diseases". (see Figure. 1 below) This clear
division of labor allows agents from different background to interact freely with each
other and joint forces easily. Each agent only needs to focus on its tasks at hand and not
on detection and resolution of various exceptions. This exception handling service is
easily applicable to independent agents because its only "cost of admission" is that agents
understand a common set of languages and protocols used The exception handling
service can be expanded to fit the needs of multiple domains, thus vastly increasing code
reusability.
10
Figure 1: "Good Citizen" approach diagram
Core
EH
Agents
new agent
registration
--------
find
diagnoses
----norm-tv-
behavior
specification
ranked
diagnoses
create/select
resolution
ecedselected
sdmtoms
d--resolution
----
symptoms to
symptomsplan
look for
EH
Agents
Created
As
Needed
diagnostic
U
quenes
exception
detection agent
(sentinel)
query
interface
exception
resolution
agent
action
interface
problem solving
agent
query
interface
actn
intefc
infrastructure
1.4). Thesis focus and outline
This project is a part of the effort in trying to identify some generic exceptions
that can happen to any agent in a dynamic environment, then categorize them into a
taxonomy. This taxonomy will serve as the knowledge-base used by the exception
handling "doctors" in the "Good Citizen Approach". The exception handling service will
focus on a set of targeted exceptions, then choose an anticipation, avoidance, detection,
and resolution method based on the available handlers registered in the taxonomy.
In order to expand the taxonomy, our team has decided to analyze several DARPA
related protocols at hand, thus extracting a set of generic exceptions. This thesis focuses
on the work done in ISI of USC, namely the TeamCore and SAM protocols developed
11
under Prof. Milind Tambe's group. Evaluation of the potential of the generic shared
service approach mentioned above in providing flexible and adequate exception detection
and resolution. Exception Handling Entry Template is designed to capture the essence of
each type of exceptioris and detailing it's anticipation, avoidance, detection, and
resolution approaches. This method is used to categorize the exceptions, and will be
investigated for its comprehensiveness.
Chapter 2 presents the background on the TeamCore protocol and chapter 3 on
SAM model. Detailed explanation will illustrate the activity and their exception handling
services. The core analysis of this thesis is stated in chapter 4, including Entry Templates
detailing each exception and their handlers. In chapter 5, a thorough analysis and
comparative study of the "good citizen" approach versus the TeamCore will be presented.
The last chapter concludes this thesis with lists of potential future research and studies.
12
Chapter 2:
2.1.1). TeamCore Protocol:
A research team lead by Prof. Milind Tambe at the Information Sciences
Institute(ISI) of University of Southern California (USC) has been designing a teamwork
protocol for some time. Uncertainties in dynamic domain obstruct coherent teamwork.
In their opinion, highly flexible coordination and communication is key in addressing
such uncertainties. Their central hypothesis is to provide the agents with general models
of teamwork to address such difficulties. An implemented general model of teamwork
called STEAM (Shell for TEAMwork) is under analysis in this thesis. It is mainly based
on the Joint Intention Theory (Levesque et al., 1990) and borrows from the Shared Plan
Theory (Grosz, 1996; Frosz & Kraus, 1996); Grosz & Sidner, 1990). Teamwork would
involve a common team goal and coordination among team members.
TeamCore is essentially a "wrapper" around a domain agent. A TeamCore agent
is a purely "social agent" with only core teamwork capabilities. While the domain agent
is the physical agent that interacts with the dynamic run time environment. TeamCore is
fundamentally a distributed team-oriented system involving the coupling of "social"
domain-independent TeamCore agents with domain-specific agents.
2.1.2). Joint Intention Theory
The joint intentions framework centers around a team's team goal. A team keeps a
common team mental state, which is shared by all the members and can only be updated
by the leader of the team. A team 0 jointly intends a team action if all team members are
committed to carry out the goal until the goal is achieved, unachievable, or irrelevant. The
common goal is named Joint Persistent Goal (JPG), and the action can be denoted as
13
JPG (0, p, q), where p stands for completion of a team action, and q stands for the
irrelevance clause. All team members involved in the JPG believe that p is currently
false (goal has not been achieved yet) and that p is their mutual goal. When q turns false,
it means the goal p is now irrelevant, thus leads to the termination of JPG for the entire
team. Below is a list of all conditions must hold true while the team JPG is engaged:
1. p must be currently false for all team members (means goal is not yet achieved).
2. V team members set p as their mutual goal, wanting it to become true.
3. Each team member believe that until the goal is achieved, unachieved, or irrelevant,
they each hold p as a weak achievement goal (WAG).
4. WAG (, p, 0, q) where:
*
-- team member in 0
*
believes p is currently False
*
when p is no longer false, or q no longer true (implies that p is achieved,
unachievable, or irrelevant), g will commit to have private belief about p
become O's mutual belief.
2.1.3). Shared Plan Theory
A shared plan relies on a mental state: intending that, which is defined via a set of
axioms that guide an individual to take actions such as communication,
enabling/disabling, or form subteam to perform assigned tasks. (Grosz & Kraus, 1996).
There are two SP, either a Full SharedPlan(FSP) or a PartialSharedPlan(PSP). The
focus here is mainly on the FSP.
FSP (P, GR, c, Tp, Tc', Rc) denotes a group GR's plan P, at time Tp to do action
cc at time Tc using recipe Ra. FSP (P, GR, x, Tp, Tc, Rct) holds iff the following
conditions are true:
14
1. V team members of group GR holds intention of proposition Do(GR, a, Tc(), that GR
does ax over time To.
2. V members of GR mutually believe that Rc is the recipe for cx.
3. For each step in
Pi in Ra:
" A subgroup GRk (GRk ; GR) has an FSP for Pi, using recipe R3i.
" Other members of GR believe that there exists a recipe s.t. GRk can bring
about
*
i and have an FSP for Pi, even if they don't know the Ri.
Other members of GR intend that GRk can bring about
i with the recipe.
A SP represents the mental snapshot of the team in action at a particular situation.
It aspires to describe the entirety of a team's intentions and beliefs when engaged in
teamwork.
2.1.4). Establish JPG
STEAM, an implementation of the TeamCore concept, uses Joint Intentions
theory mainly as its fundamental building block. It is based on enhancement to the Soar
architecture (Nowell, 1990), with a set of domain independent rules in Soar. TeamCore's
main concept is to facilitate coordination amongst team members and also provides a
minimal set of monitoring and repair services. The domain-independent component of
teamcore is responsible for surmounting and adapting to uncertainties in the dynamic
complex domains.
At its current stage, TeamCore requires that human users enter all domain related
information before agents enter into group commitment. This step abstracted away the
user specified domain dependent information from the core of the team organization
rules. The first step is to establish JPG. This involves the three step establish commitment
procedure:
15
*
The chosen team leader will send out broadcast a message asking each
potential team member to commit to the JPG. (establish WAG to operator
OP, if no response within time limit, resend message).
*
Upon receiving the message, each agent vi will in turn send out a message
commit to the WAG for OP.
*
Wait until Vvi responded positively, confirm the establishment of JPG.
Each team agent carries with it the pre-specified team plan. Thus upon the
establishment of the initial JPG, agents have agreed to commit to the same common goal,
and shared the same team state. This commitment will not the terminated until any one
agent privately believed that the goal p or conditions q have changed, then informing
other members, eventually the OP will update team state, and JPG is terminated. The
whole hierarchy of the TeamCore model revolves around reactive plans already installed
into the agents. At times of changes, the different conditions of plan will be triggered,
and different sub-plans will be activated. For consistency, only the (sub)team leader will
have the power to change the (sub)team state, and thus synchronizing all agents on that
(sub)team. Private belief that leads to the termination of JPG will also be conveyed by
the individual agent to the leader, and under unanimous approval, the leader will change
team state variables and terminate group commitment. Thus the JPG concept helped
team organization and avoided many coordination problems.
2.1.5). Monitor and Repair
In addition to the multiple levels of JPG commitment by the teams and subteams,
TeamCore also incorporates some mechanisms of monitoring and repair. The particular
monitoring designed for TeamCore is to predict various conditions that would cause goal
p to no longer remain false (achieved, unachievable, or irrelevant). These axioms were
loaded at initialization time along with other domain specific information. Any
observations by domain agents that violates the pre-set axioms will set off a trigger,
which then diagnoses it to be either a "Critical Role Failure" or a regular "Role Failure".
16
This is determined based on the role relationship conditions between agents, AND, OR,
or = dependency roles. Critical role failure is defined when a single role failure causes
the unachievability of the goal. The action taken for repair in both cases is team
reconfiguration. For a critical role failure, determine a team member to replace for the
failed role.
1. Call for candidates for role substitution.
2. Check for appropriate role capabilities and conflicting previous responsibilities.
3. Announce role-substitution to the team.
4. Delete non-critical conflicting commitments for the new agent.
And for a role-failure, just disable the single dependent agent from role performance.
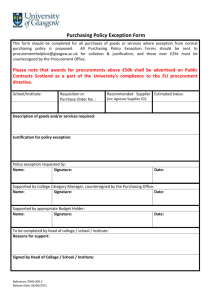
2.1.6). Selective Communication
Another interesting feature of the TeamCore system is the selective
Communication method used to limit the cost. An expected Utility function is calculated
depending on the value of Benefit versus the value of Communication cost. While not an
exception handling mechanism, but the addition of variable communication possibilities
does further complicate the exception detection and repair efforts. The diagram below by
Dr. Milind Tambe explains it in detail:
17
Figure 2: Plan UML
UML Class Diagram: TEAMCORE Team Plan
Team Operator
,
i
Plan
i
1
Communication
Application
1
Execution
1
Domain Level
Agent
Cost
Plan Conditions
Teamcore Agent
Name: String
Name: String
Execution
Termination
Termination
18
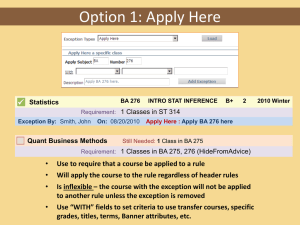
Figure 3: Seq UML
UML Sequence Diagram: Team Communication
Team Leader
Team
Member 2
Team
Member L
Team
Member 3
<establish commiqrlent, joint activity,> (request)
<refusecommitment, j oint-activity, reason> (refusal)
<.-b---d-
<negotiation...>(**)
-
.
- m.
j-i------
y
(-n-
<establishedcomn itment, joint activity' (confirmation)
<established com
mitment,
jointactivity
(confirmation)
>
<established commitment, joint-4ctivity> (confirmation):
<terminate, reasoit> (assertion)
<refuseterminatiop,jointactivity, reasoA> (refusal)
--- -- - - -..-..
---------------- --
<negotiation... >(**)
. . .-..-..-.-.-...
I.... ...
19
(*) This nonstandard
UML notation denotes
a broadcast.
(**) This capability is
undet active development
Figure 4: Team UML
UML Class Diagram: State of a Single Agent
I
Root Belief State
Unique-name: String
Participates
In
*Subteams
Self Belief State
1
Speaking Order
Member
or Leader
Names: Ordered List
of Strings
Type: String
1
Value: String
Communicationcommand: String
*
*
RoleInfoPlan
Member List
*
Plan_name: String
Team_role: String
Member
Members I
0,1
Name: String
Channel
Approach toCommunication: String
Preferred
Colocated: (yes, no I
Leader: String
*
TeamType: String
Available
Type: String
Uniquename: String
Contains-subteam- [yes,n
Cannot~participate: String
Trust: List of Strings
Communication
Team Belief State
1
Lede
20
Figure 5: TeamCore generic Chart
TeamCore Model
Load Domain
Establish Joint
Estimate Gamma
Monitor &
Information
Persistent Goal
(communication)
Repair
Terminate Joint
Persistent Goal
(JPG)
(JPG ) /
-ooo"oooooooooo~ooooo
Agent reaches
Leader makes
Agents reply
Confirm JPG
announcement
to join team
established
private belief
Leader
updates team
state
Inform all
other team
members
Confirm and
Terminate
JPG
Monitor and Repair Mechanisms
Specify conditions and
axioms
role relationships:
AND, OR, dependencies
Monitoring:
Invoke [Repa ir}
infer role responsibilities
for re-planni
abnormal behavior that violates
axioms
Critical vs. F ole Failure
21
Update team belief
and team states
Chapter 3:
3.1). SociallyAttentive Monitor (SAM)
In the world of dynamic agents, execution monitoring is a very important issue.
Previous investigations of execution monitoring usually center around a single
agent/system being the monitor, detecting and analyzing other agent behaviors and
dispatch for exception handlers whenever needed. However, short comings of such
method arises when errors not only come from individual agent behavior, but rather is
due to the inter-agent and agent-environment interactions. This complicates the task
since it now has to monitor all of these interactions and their failure may generate chain
failures involving other agents.
SAM is a novel approach currently under study by Dr. Gal Kaminka at the
Information Sciences Institute of University of Southern California. This social
execution framework is complementary to the existing approaches. SAM captures the
various social relationships between agents and environment, and violations are based on
these relationship rules. Their hypothesis is that monitoring the maintenance of those
relationship rules are easier than determining the "correct" behavior for at least some
classes of exceptions.
SAM possesses a knowledge base of various types of social relationships
employed in that particular domain. And the SAM monitoring agent will employ various
protocols available such as communication, plan-recognition, etc. to help it to observe the
agent-agent, agent-environment states, thus trying to deduce the relationship from the
observation and match it to the template. Example given would to use velocity and
relative position of two planes to judge whether they are flying in formation. SAM is
responsible for the analysis of a violation after its detection, and uses relationship model
to try to explain the error. Other exception handlers must be implemented to effectively
correct the situation and repair the malfunction agent if necessary.
22
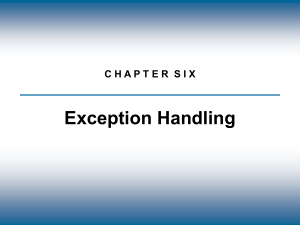
Figure 6: General Structure of a SAM System.
The general structure of SAM's design emphasizes layers of abstraction, thus
clear division of responsibilities. The knowledge-base contains models of the social
relationships between monitored agents/environment. The monitor will be collecting
information to represent the agent relationships. And the detector will verify the validity
of the observed relationship through comparison with the knowledge base. If a failure is
detected, then analysis will be done on it to examine the cause and find ways of fixes.
23
Chapter 4:
4.1). Exception Handling Template:
The goal of this thesis is to investigate the method of exception collection
mechanism designed for the enrichment of the taxonomy. We have conduct a detailed
analysis of the TeamCore and SAM (Social Attentive Monitor) protocol designed by
Prof. Milind Tambe's group at ISI. This study will lead to the collection of exceptions
relating to these protocols. We realize that TeamCore is an abstract "wrapper" protocol
that tries to encapsulate the coordination efforts, thus we looked at the exceptions that are
anticipated, avoided, detected, and resolved through this protocol.
The Exception Handling Template is our main tool for the collection of exception
cases and their related handlers. We realize that the one of the most important section in
the Good Citizen design is to be able to capture information about the various exceptions
in the Exception database. Related information are being separated into exception
handlers, meta-process, exception symptoms sections, etc. In order to better categorize
the protocols, exceptions, and handlers, a detailed Exception Handler table will be used to
test the flexibility of the design of the EH Knowledge chart and also to compare with
other protocols. The EH Template is being tested on the TeamCore protocol for the first
time.
Because of the abstract nature of the protocol, different variations will be looked
at and designed. The exceptions then will be extrapolated into "symptoms". According
to the various "symptoms", methods of repair, detection and prevention will be evaluated
as fit. All these analysis will at the end be used to fill the taxonomy tree with the generic
exceptions. Each exception will be considered augmented by the following data structure:
+
*
+
+
+
+
+
Detailed description of the exception type
Types of processes in which it normally occurs
Anticipation methods
Avoidance methods
Detection methods
Resolution methods
Criticality: various system conditions in which this specific exception type may be
critical
24
And each protocol had a meta-process table that captured more information about the
exception handling in the flow process:
+
+
+
+
+
+
Identify target excetions
Generate exception finding processes
Enact exception finding processes
Select exception instances to fix
Generate exception fixes
Enact exception fixes
The design of the EHT has evolved along with each stage of investigation, further
improved its capability to accurately capture the exception related information. This
analysis is only the beginning of the collection of exception cases, and there will be much
more work done relating to other protocols such as Contract Net, Multi-level
Coordination, etc. Below is the analysis of the exception results:
EH entry template
Reference
Towards Flexible Teamwork (Tambe '97)
For each process
Name
Description
Team Work
autonomous agents group together for a common
Generalizations
task in a dynamic environment
- Multi-Agent System Coordination Mechanism
Applicability conditions
including all underlying assumptions:
all agents available, leader chosen, communication
channel available, proper domain information given.
-- Team Commitment Failure
-Role Relationship Violation
-- Coordination Failure
-- Communication Problem
- Information Distribution Problem
Exceptions
Inputs
Outputs
Mapping
Decomposition
25
For each process
Name
Team Core
Description
autonomous agents group together for a common
task in a dynamic environment using the TeamCore
protocol
- Team Work
including all underlying assumptions:
all agents available, leader chosen, communication
channel available, proper domain information given.
Generalizations
Applicability conditions
Exceptions
----
Inputs
Outputs
Mapping
Decomposition
26
Team Commitment Failure
Role Relationship Violation
Communication Problem
For each exception type
Name
Description
Impact (AKA criticality)
Generalizations
Anticipation handler(s)
Avoidance handler(s)
Detection handler(s)
Resolution handler(s)
Team Commitment Failure
Team agents abnormally terminate participation
with the common tasks, does not act in accordance
with the team plan.
Team goal affected, may become unachievable for
the entire team depending on the role of the failed
agent.
Role Relationship Violations
n/a
JPG Coordination Handler (TeamCore)
Relationship Violation Detection Handler
For each handler
JPG Coordination Handler
TeamCore -- JPG termination requires that each
team member shares the same belief that JPG is
un/achieved/irrelevant, thus all members share the
common (sub)team state, and cannot terminate until
uniform consensus reached.
TeamCore -- only leader can update team state, and
must get all members to share the same belief before
termination
Avoidance Handler
_
communication capabilities
leader updates (sub)team state
_
all agents alive and listening
agent with private belief of
un/achievable/irrelevant information spreads its
Name
Description
Generalizations
Applicability conditions
knowledge.
JPG, team agents, leader's messages
JPG establishment
Inputs
Outputs
Mapping
Decomposition
_
_
Leader send out JPG request
Agents reply with confirmation
Team JPG established
Relationship Violation Detection Handler
SAM - agents observe each other's behavior and
does comparison to social model, if not in
accordance, then send out error message of "Role
Relationship Violation".
Detection Handler
communication capabilities
all agents alive
Name
Description
Generalizations
Applicability conditions
27
Inputs
_
Outputs
Mapping
Decomposition
team relationship model accessible
social relationship model
individual agent's observation in the physical
domain
error message if applicable
team member make observations
compare with social model
send/not send error message
28
For each exception type
Name
Description
Role-Relationship Violation
Agent does not act in accordance with its role in the
team scenario.
Ex. Missing In Action agent causes other agents to
wait infinitely.
Affect the behavior of other agents in the team. May
cause Goal to be come unachievable.
Team Work Exceptions
n/a
n/a
_
Check Role Dependency Handler (TeamCore)
Relationship Violation Detection Handler
(SAM)
_
Change Plan Handler
Impact (AKA criticality)
Generalizations
Anticipation handler(s)
Avoidance handler(s)
Detection handler(s)
Resolution handler(s)
Agent Replacement Handler
For each handler
Check Role Dependency Handler
TeamCore - constant checking on team states to
Name
Description
make sure the relationships are not violated.
Generalizations
Applicability conditions
Detection Handler
communication channels available
leaders update (sub)team state
Inputs
Role Relationship Model
Outputs
send
Mapping
Decomposition
load Role Relationship Model
out Checking requests
find target relationship rules
send out check request
Relationship Violation Detection Handler
SAM - agents observe each other's behavior and
does comparison to social model, if not in
accordance, then send out error message of "Role
Relationship Violation".
Detection Handler
_
communication capabilities
all agents alive
team relationship model accessible
social relationship model
individual agent's observation in the physical
domain
error message if applicable
Name
Description
Generalizations
Applicability conditions
Inputs
Outputs
Mapping
Decomposition
team member make observations
29
compare with social model
send/not send error message
Change Plan Handler
TeamCore - if JPG becomes unachievable or
irrelevant, then dynamic change of plan or choose
an alternative plan.
Resolution Handler
communication available
leader updates (sub)team state
Role Relationship Model, Team Model
new JPG or alternative plan
_ depending on alternative team plan
Leader send out request
Announce change of plan to all team agents
Name
Description
Generalizations
Applicability conditions
Inputs
Outputs
Mapping
Decomposition
Agent Replacement Handler
- Replace the misbehaving agent with a healthy
Name
Description
agent.
Generalizations
Applicability conditions
_
Resolution Handler
Pre-run time information input
communication availability
healthy agent available
Inputs
Outputs
Mapping
Decomposition
_
_
_
30
Domain dependent information
Role Relationship Model
depending on agent availability and capabilities
Leader send out request
all agents examine own ability
If suitable, send in replacement agent; or else
change plan
For each exception type
Coordination Failure
Agents join a team, but initialization of actions are
not uniform
Goal achieve-ability affected.
Team Work Exceptions
n/a
Establish JPG Handler
n/a
n/a
Name
Description
Impact (AKA criticality)
Generalizations
Anticipation handler(s)
Avoidance handler(s)
Detection handler(s)
Resolution handler(s)
For each handler
Inputs
Outputs
Establish JPG Handler
TeamCore - all members establish JPG first, before
process orders, leader take responsibility of
coordination
Avoidance Handler
communication availability
leader updates (sub)team state
Goal, agents, leader chosen
Agent Team working for common JPG
Mapping
_
Name
Description
Generalizations
Applicability conditions
Decomposition
-
31
n/a
Leader send out JPG request
Agents reply with confirmation
announce JPG established
For each exception type
Communication Problem
ex: Messages from the leader gets lost during
communication.
- Team coordination
- Goal achieve-ability
Team Work Exceptions
n/a
n/a
Repeat Message Handler
Spread Error Warning Handler
Name
Description
Impact (AKA criticality)
Generalizations
Anticipation handler(s)
Avoidance handler(s)
Detection handler(s)
Resolution handler(s)
For each handler
Repeat Message Handler
Repeatedly sending message if desired response is
not received within a time limit.
Detection Handler
communication availability
_
leader update (sub)team state
Name
Description
Generalizations
Applicability conditions
Inputs
Outputs
Mapping
Decomposition
no reply from certain agent during time limit
send out message again
n/a
if over time limit, send out message again,
record number of resend.
Spread Error Warning Handler
Count how many tries, after a certain number of
unsuccessful tries, and send Error message to the
entire team.
Resolution Handler
_
communication availability
leader update (sub)team state
Name
Description
Generalizations
Applicability conditions
Inputs
Outputs
_
Mapping
Decomposition
_
32
resend ineffective
message to other agents on the team, warn them
of the communication failure.
if set number of resend does not work, send out
message to all other agents
For each exception type
Information Distribution Problem
Agent observes/receive information critically related
to the team goal/state, and fails to communicate to
other team members.
Goal achieve-ability for the team
Team Work Exceptions
n/a
n/a
Observation Handler
Communication Probability Handler
Name
Description
Impact (AKA criticality)
Generalizations
Anticipation handler(s)
Avoidance handler(s)
Detection handler(s)
Resolution handler(s)
For each handler
Observation Handler
A supervising agent constant checks of the decision
of communication by individual agent.
Detection Handler
communication availability
team model (with role relationships)
team state (with relevancy clauses)
Team Model, JPG axioms
decide relevancy of information, accuracy of
the individual agent's communication decisions
_ if information does affect JPG, then call
Communication Probability Handler.
(If Benefit > Cost, send message
If Benefit < Cost, do not send message)
if information is irrelevant, keep put
receive information
check against Team Model and axioms
execute mapping decision
Name
Description
Generalizations
Applicability conditions
Inputs
Outputs
Mapping
Decomposition
Communication Probability Handler
Supervisor agent updates the communication
probability cost table in the individual agent (weighs
communication cost and benefits, determine if other
members may infer the same information before
send out new information).
Resolution Handler
communication availability
leader updates (sub)team state
agent error in decision to communicate
_ updated agent's communication probability
table
Name
Description
Generalizations
Applicability conditions
Inputs
Outputs
Mapping
Decomposition
33
For every meta-process
Name
Description
Generalizations
Applicability conditions
Inputs
Outputs
TeamCore EH Meta-Process
based on Joint Intention and Shared Plan theories,
facilitates coordination and team work model. Group of
agents collaborate together to achieve a common task
goal.
Team Work (EH Meta-process)
resolution process status
working team order
Mapping
Decomposition
Name
Description
Applicability conditions
Generalizations
Inputs
Outputs
Identify target exceptions (TeamCore)
Hard wired at run time.
* Team Commitment Failure -- Team agents abnormally terminate
participation with the common tasks, does not act in accordance
with the team plan.
* Role Relationship Violation -- Agent does not act in accordance
with its role in the team scenario.
* Communication Problem -- Messages from agents get lost during
communication.
Identify target exceptions
Classification of exception types:
Team Commitment Failure
Role Relationship Violation
Communication Problem
Mapping
Decomposition
Name
Description
Applicability conditions
Generalizations
Inputs
Generate exception finding processes (TeamCore)
hard wired at run time.
Generate exception finding processes
Classification of exception types:
Team Commitment Failure
Role Relationship Violation
Communication Problem
Outputs
detection handlers according to the classes of exceptions:
- Relationship Violation Detection Handler or
_ Check Role Dependency Handler or
_ Repeat Message Handler
34
Mapping
*
+
*
_
symptoms for Team Commitment Failure - Relationship
Violation Detection Handler.
symptoms for Role Relationship Violation-- Relationship
Violation Detection Handler.
symptoms for Communication Problem -- Repeat Message
Handler
search for appropriate detection hander in the knowledge base.
Decomposition
Name
Description
Applicability conditions
Generalizations
Inputs
Enact exception finding processes (TeamCore)
enact exception detection handlers at run time
Enact exception finding processes
the detection handler chosen for the exception class:
_ Relationship Violation Detection Handler or
_ Check Role Dependency Handler or
_ Repeat Message Handler
Outputs
Mapping
Decomposition
list of instances of exceptions
Name
Description
Applicability conditions
Generalizations
Inputs
Outputs
Mapping
Decomposition
Select exception instance(s) to fix (TeamCore)
choose the order to fix exception instances, at run time
Name
Description
Applicability conditions
Generalizations
Inputs
Outputs
Generate exception fix(es) (TeamCore)
generate fix handlers at run time
Mapping
Select exception instance(s) to fix
list of instances of exceptions
list of instances of exceptions
FIFO order
Generate exception fix(es)
instance of exception from Selector
exception resolution handlers:
Change Plan Handler
Agent Replacement Handler
For Role Relationship Violation:
* if replacement agent can be found -- Agent
Replacement Handler
* if no agent available for replacement -- Change Plan
Handler
Decomposition
Name
Enact exception fix(es) (TeamCore)
35
Description
Fix the error by enacting the resolution handlers from the
generator, at run time.
Applicability conditions
Generalizations
Inputs
Outputs
Mapping
Decomposition_
Decomposition
Enact exception fix(es)
Change Plan Handler or
Agent Replacement Handler
resolution process status
working team order
For Role Relationship Violation:
* Change Plan Handler -- choose another alternative
team plan
* Agent Replacement Handler -- only if a replacement
agent can be found.
_________________________
36
For every meta-process
Name
Description
Generalizations
Applicability conditions
Inputs
Outputs
Socially Attentive Monitor (SAM)
identifies agent exceptions via observable abnormal
social behavior
Team Work (EH Meta-process)
restore relationship order
resolution process status
Mapping
Decomposition
Name
Description
Applicability conditions
Generalizations
Inputs
Outputs
Mapping
Decomposition
Identify target exceptions (SAM)
hard wired at design time.
Name
Description
Generate exception finding processes (SAM)
select appropriate exception detector, hard wired at
design time.
Applicability conditions
Generalizations
Inputs
Outputs
Mapping
Decomposition
Identify target exceptions
n/a
Role Relationship Violation
Generate exception finding processes
Role Relationship Violation
Relationship Violation Detection Handler
Name
Description
Applicability conditions
Generalizations
Inputs
Outputs
Mapping
Decomposition
Enact exception finding processes (SAM)
enact exception detector at run time
Name
Description
Applicability conditions
Generalizations
Select exception instance(s) to fix (SAM)
select the identified exception instance to fix, run time
Enact exception finding processes
Relationship Violation Detection Handler
instances of role relationship violation
Select exception instance(s) to fix
37
Inputs
Outputs
Mapping
Decomposition
instances of role relationship violation
instances of role relationship violation
FIFO
Name
Description
Applicability conditions
Generalizations
Inputs
Outputs
Mapping
Decomposition
Generate exception fix(es) (SAM)
generate fix handlers at run time
Name
Description
Applicability conditions
Generalizations
Inputs
Outputs
Enact exception fix(es) (SAM)
fix troubled agent and restore relationship order
Generate exception fix(es)
instances of role relationship violation
CONSA (negotiation protocol)
Enact exception fix(es)
CONSA (negotiation protocol)
resolution process status
restore relationship order
Mapping
Decomposition
38
Chapter 5:
5.1). Comparison to the Good Citizen's Architecture
One sophisticated method that is currently under research here at CCS (Center of
Coordination Sciences) of MIT is a variant of the "central monitoring" method. The
research underway is to extracting the layer of generic exceptions from all the local
agents, and allow an outside Exception Handler (EH) to take care of the detection,
prevention, repair and learning of the errors. This view concurs with Grosz (1996), who
states that "capabilities for teamwork cannot be patched on, but must be designed in from
the start". "Good Citizen" was designed based on an dynamic agent society allowing
heterogeneous agent participation, and had team model structure at the center of its
design.
There is an established stable environment provided for all types of agents. There
are several public service agencies which provide some common functionalities shared by
all agents, and act as interfaces between individual agents and the rules and knowledge
bases in the system. (see figure 1)
Before any agent attempt to join this "society", it must first agree to the rules and
protocols utilized in the society, which are provided by the Socialization Service. They
must register with the Socialization Service, which then pull the data from Social Laws
and ask the agent to observe the rules listed. This ensures that all agents speak a common
"language" and have a set standard. The set of Social Laws dictating the proper protocol
and normative behavior; it is supplied according to the needs of the dynamic domain. The
Notary Service is utilized when agents enter the society, a contract between the society
and the agent is initialized, which is then stored by the Notary Service. This contract is
the "entry fee" that ensures the agent entering has agreed to observe the laws and
behavior dictated by the social laws, and in return, the society will provide the agent with
various public services, which include the monitoring and Exception Handling Service to
alleviate the burden on individual agents.
39
The last agency is the Exception Handling Service (EH). It's main function is to
provide sentinels that monitor the behavior of agents in the society, and provides the
exception handling mechanism whenever necessary. When an agent decides to join a
team, a contract detailing the proper interaction between various agents and the team goal
are registered with the Notary Service. Then the Notary Service will alert the EH about
that particular contract. According to the type of contract, the EH will search in its
exception knowledge base for lists of possible exceptions to anticipate and avoid. The
EH then instantiates sentinels which are being sent into the agent society (themselves
being agents of one type) to take the monitoring and detection responsibilities. When any
sentinels observes an exception, it will alarm the EH, which then chooses a proper
method of avoid/repair according to the knowledge base.
The EH templates described in the last section is utilized in the exception
knowledge base, it's attempt to capture the essence of a generic type of error and it's
corresponding respond handlers. The same data are also entered into the Process Hand
Book at CCS in the form of a taxonomy. Please see Figure 7 diagram below.
40
Figure 7: Good Citizen Approach Diagram.
o
o
o
0
Agent Society (dynamic environment)
0
0
0
0
T
Socialization
Service
Social
Laws
Notary Service
Exception.
Handling Service
Contracts
(Social &
Team)
Exception
Knowledge
-base
After realizing that TeamCore is also an abstraction of general functionalities
away from domain agents into the TeamCore level, we attempted a comparison analysis
between TeamCore and our Good Citizen approach (GC). TeamCore attempts to abstract
the team coordination efforts from the domain agents, thus the "wrapper" TeamCore
agents handled all the social interaction functionalities. GC on the other hand, attempts
to encapsulate the monitoring and exception handling efforts with a social institute. It's
also designed for a much grander scaled agent society instead of one team. Below is a
chart detailing the similarities and comparisons between the two designs.
41
5.2). Table listingthe comparison between TeamCore and Good Citizen
Table 1: TeamCore vs. Good Citizen
Features
TeamCore
Good Citizen
Comment
domain dependent
information
Load Domain
Information
Social Laws
Monitoring
Monitoring
Sentinels
exception handling
Repair
Exception Handling
Service
Detection of
Violation
preset Axioms, goal/ Knowledge-base
domain dependent
both needs to load
domain dependent
information in
advance
EHS in GC sends
out Sentinels to
perform the
monitoring role
TeamCore does not
handle all types of
exceptions, only
when the role failure
can be repaired by
team reorganization
GC is much more
comprehensive and
will be able to detect
more run time errors
Team coordination
leader (operator)
conducts
coordination.
Team membership
pre-determined
Notary Service track
the agent
commitments. Does
not organize team
memberships.
GC does not
describe the detail
of the actual calling
of teams, but it
allows a much more
flexible team
membership
Commitment
JPG function is
commitment of all
team agents to a
specific goal. Not
possible to terminate
Contracts section
store both social
(agent-society) and
team contracts
until JPG terminate.
Agent Society
include penalty..
random agents that
decides to pay the
"entry fee" and obey
team agents
the social laws
Guards to society
GC doesn't assume
loyalty, monitor +
check for
commitment,
contract may
Socialization
Service
NONE.
All team agents are
pre-chosen and
join,
GC allows much
more flexibility in
the heterogeneity of
agent society.
GC allows random
agents into society,
so need guards like
the SS.
introduced.
42
According to the chart analysis above, we can see that TeamCore is a model more
specifically for the initiation/organization of a team task. It's focus is on the
accomplishment of (sub)tasks when the team agents commitment to a common goal.
While the GC approach is one a different scale, because GC does not worry about how
the team gets together and carries out the (sub) tasks. GC is a model for an entire agent
society, how it should function so that it can bring together agents of different capabilities
and design to work harmoniously in a dynamic environment on team objectives. While
TeamCore certainly is a very handy tool for team organization, and handles several team
type of exceptions. GC has a more comprehensive scope of exception handling service
because its knowledge-based database incorporates all types of generic exceptions and
their responding handlers. In addition to that, the two schema can be combined and
complement each other to form a less error-prone environment for all. GC can be used to
set up the agent society, while TeamCore used specifically in the particular organization
procedure. In addition, the sentinels sent out by the Exception Handling Service for the
detection of errors in team performance can incorporate the SAM methods.
43
Chapter 6:
6.1). Future Direction:
In order for the Good Citizen (GC) architecture to work well, it needs to include
exception information for many other protocols. Our lab has so far focused on the
TeamCore protocol, Contract Net Protocol (used by DARPA), and Multi-Level
Coordination Protocol. This analysis is only the beginning of the collection of exception
cases, and there will be much more work done relating to other protocols such as Contract
Net, Multi-level Coordination, etc.
In the future, we want to greatly expand the taxonomy to include many other
protocol analysis, thus further the capabilities of our exception knowledge base. Much
more work can be done related to the specific exception detection, research algorithm for
the resolution/ diagnosis of errors, designing a standard language for the definition of
normative behavior. Eventually, the Good Citizen architecture can be put into
implementation and test.
44
References:
Agent architectures for flexible, practical teamwork.
Tambe, Milind.
In Proceedings of the National Conference on Artificial Intelligence (AAAI). August,
1997.
Teamwork in real-world, dynamic environments.
Tambe, Milind.
In Proceedings of the International Conference on Multi-agent Systems (ICMAS). Dec.,
1996.
Tracking dynamic team activity.
Tambe, Milind.
In Proceedings of the National Conference on Artificial Intelligence(AAAI). August,
1996.
Dellarocas C., Klein M. Exception handling in agent systems, 1998. Adaptive System and
Evolutionary Software homepage, http://ccs.mit.edu/ases.
M. Klein and C. Dellarocas. Exception Handling in Agent Systems. Proceedings of the
Third International Conference on AUTONOMOUS AGENTS, Seattle, Washington,
1999.
Klein, M. An Exception Handling Approach to Enhancing Consistency, Completeness
and Correctness in Collaborative Requirements Capture.
Journal of Concurrent Engineering Research and Applications. March 1997.
Tambe, M. 1997 Towards Flexible Teamwork Journal of Artificial Intelligence Research,
Volume 7, Pages 83-124 On-line appendix for this article: STEAM rules and
documentation
Tambe, M. 1997 Agent architectures for flexible, practical teamwork. National
Conference on Artificial Intelligence (AAAI-97)
Tambe, M. Implementing agent teams in dynamic multi-agent environments
Applied Artificial Intelligence 1998; volume 12
Qiu, Z. and Tambe, M. 1998 Flexible Negotiations in Teamwork: Extended Abstract
Proceedings of the AAAI Fall Symposium on Distributed Continual Planning
Tambe, M., Shen, W., Mataric, M., Goldberg, D., Modi, J., Qiu, Z., and Salemi, B.,1999
Teamwork in cyberspace: Using TEAMCORE to make agents team-ready To appear in
the Proceedings of AAAI Spring Symposium on Agents in Cyberspace.
Franccedilois Michaud and Maja J Mataric, "Learning from History for Behavior-Based
Mobile Robots in Non-stationary Conditions", joint special issue on Learning in
45
Autonomous Robots, Machine Learning, 31(1-3), 141-167, and Autonomous Robots, 5(34), Jul/Aug 1998, 335-354.
Maja J Mataric, "Coordination and Learning in Multi-Robot Systems", IEEE
Intelligent Systems, Mar/Apr 1998, 6-8. PDF version is also available.
Maja J Mataric, "Learning Social Behavior", Robotics and Autonomous
Systems, 20, 1997, 191-204.
Maja J Mataric, "Reinforcement Learning in the Multi-Robot Domain",
Autonomous Robots, 4(1), Jan 1997, 73-83.
Maja J Mataric, "Designing and Understanding Adaptive Group Behavior",
Adaptive Behavior 4:1, Dec 1995, 51-80.
Maja J Mataric, "Issues and Approaches in the Design of Collective Autonomous
Agents", Robotics and Autonomous Systems, 16(2-4), Dec 1995, 321-331.
Maja J Mataric, "Using Communication to Reduce Locality in Distributed Multi-Agent
Learning", Proceedings, AAAI-97, Providence, Rhode Island, Jul 27-31, 1997, 643-648.
Dani Goldberg and Maja J Mataric, "Interference as a Tool for Designing and Evaluating
Multi-Robot Controllers", Proceedings, AAAI-97, Providence, Rhode Island, Jul 27-31,
1997, 637-642.
46