Training Toddlers Seated on Mobile Robots to Steer Using Force-Feedback Joystick
advertisement

376
IEEE TRANSACTIONS ON HAPTICS,
VOL. 5,
NO. 4,
OCTOBER-DECEMBER 2012
Training Toddlers Seated on Mobile Robots
to Steer Using Force-Feedback Joystick
Sunil K. Agrawal, Xi Chen, Christina Ragonesi, and James C. Galloway
Abstract—The broader goal of our research is to train infants with special needs to safely and purposefully drive a mobile robot to
explore the environment. The hypothesis is that these impaired infants will benefit from mobility in their early years and attain childhood
milestones, similar to their healthy peers. In this paper, we present an algorithm and training method using a force-feedback joystick
with an “assist-as-needed” paradigm for driving training. In this “assist-as-needed” approach, if the child steers the joystick outside a
force tunnel centered on the desired direction, the driver experiences a bias force on the hand. We show results with a group study on
typically developing toddlers that such a haptic guidance algorithm is superior to training with a conventional joystick. We also provide
a case study on two special needs children, under three years old, who learn to make sharp turns during driving, when trained over a
five-day period with the force-feedback joystick using the algorithm.
Index Terms—Haptic guidance, force-feedback joystick, force tunnels, driver training
Ç
1
INTRODUCTION
I
N typically developing infants, the emergence of independent mobility is associated with advances in perception,
cognition, motor, and social skills [1], [2]. Infants with special
needs, e.g., with cerebral palsy and spina bifida, often display
significantly limited independent walking [3]. Scientific
research has shown that immobility limits the exploratory
experience of a child, the typical development, and consequently the quality of life [4]. However, children with such
special needs do not have access to powered mobility devices
in their early growth years. The current standard in the
United States for power wheelchair training is based on
“readiness,” determined by attending medical staff [5].
Over the past years, our laboratory has quantified results
with a conventional joystick-driven power mobility device
[6], [7], [8]. Children who received training were advanced on
motor, cognitive, perceptual and social subscores of the
Bayley III assessment. In line with the findings of Ramey and
Ramey [9], we believe that these interventions can be
optimally effective for children with special needs if applied
within the principles of early intervention, i.e., the interventions should 1) begin as soon as possible, 2) be built on the
current abilities of the child, and 3) be primarily provided in
the typical environment of the child such as the home, school,
and community as opposed to a clinic. From our studies, we
have observed that despite up to six months of training three
times a week, infants displayed difficulties in learning to turn
left or right [7]. This barrier needs to be overcome if after basic
. S.K. Agrawal and X. Chen are with the Spencer Laboratory, Department of
Mechanical Engineering, University of Delaware, Newark, DE 19716.
E-mail: {agrawal, chenxi}@udel.edu.
. C. Ragonesi and J.C. Galloway are with the McKinly Laboratory,
Department of Physical Therapy, University of Delaware, Newark, DE
19716. E-mail: {clbr, jacgallo}@udel.edu.
Manuscript received 13 Sept. 2010; revised 20 Sept. 2011; accepted 4 Nov.
2011; published online 11 Nov. 2011.
For information on obtaining reprints of this article, please send e-mail to:
toh@computer.org, and reference IEEECS Log Number THSI-2010-09-0051.
Digital Object Identifier no. 10.1109/ToH.2011.67.
1939-1412/12/$31.00 ß 2012 IEEE
training the infants will be placed into a toddler classroom,
which would require more complex navigation. This
motivates the study conducted in this paper, i.e., to test the
feasibility of using haptic force field technology for children
with significant mobility impairments.
Today, haptics is becoming a powerful tool to enhance
perception and provide assistance to humans [10], [11], [12].
Force feedback has been used to improve control of
functional tasks requiring fine manipulation, such as during
surgery or to provide better perception to those who are
physically challenged [13], [14], [15], [16]. Different force
effects are currently available to provide perceptual feedback
to the user in various applications. While assistance during
functional tasks has been well explored, the effectiveness of
haptic guidance on functional learning through such interfaces is debated. Several studies have found that haptic
guidance did not improve motor learning and may even
impair it [17], [18], [19]. In a recent study [20], researchers
used a similar pre-test-training-post-test paradigm as our
experiment for movement learning using a PHANToM
device, and found that certain types of haptic guidance
improve learning while others did not.
Although the guidance hypothesis [19] states that providing too much haptic guidance can have negative effects on
motor skill learning, studies using “assist-as-needed” paradigm have shown positive results, whether the participants
were adults or children. In [21], a 1D force with fading
strength was implemented on a steering wheel to train adults
to learn a steering task in a virtual environment. Effectiveness
of such an assist-as-needed strategy has also been shown in
gait training of stroke patients using robotic exoskeletons,
which requires a multijointed coordination of the walking
task [22], [23].
This paper expands the idea proposed in [24], where we
developed an “assist-as-needed” force field and applied it to
a group of adults and two special needs toddlers. In this
paper, we show results of a group study on toddlers seated
on mobile robots using the same guidance method. This
Published by the IEEE CS, RAS, & CES
AGRAWAL ET AL.: TRAINING TODDLERS SEATED ON MOBILE ROBOTS TO STEER USING FORCE-FEEDBACK JOYSTICK
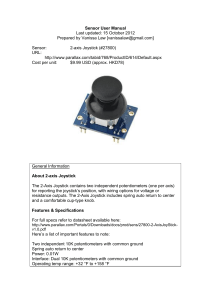
Fig. 1. Directional training experiments using force-feedback joystick on
two children diagnosed with spina bifida and cerebral palsy.
paper is the only study that has been conducted on toddlers
with an average of 30 months of age. The study shows that
toddlers of this age can learn from force feedback higher
level driving behaviors such as steering. A recently
completed study investigated the use of a force-feedback
joystick for powered mobility training of 4-9 years old
children [25]. This study is very relevant to the research
presented in this paper and will be used to compare some
results. However, it is important to point out salient
differences with this reported work. 1) The force field in
our work is a 2D field implemented on a force-feedback
joystick, and only acts outside a cone centered on a nominal
direction of a joystick motion, predicted by an error
correcting control law. A 2D force allows correction of the
undesired joystick motion even in the forward/backward
direction which controls the robot translational velocity.
Since the force field focuses on the desired joystick direction,
trajectory curvature is also preserved. 2) The subjects in our
study are toddlers under three years of age. Training
methods need to be adjusted to accommodate their
characters, such as cognition level and attention span. In
particular, toddlers that young do not understand instructions such as “drive the robot to follow a line on the ground.”
As a result, a trainer has to stand at each turning point on the
path to encourage the child to come to that point and move
on to the next turning point or the goal once the child
reached the next region in the training area.
The rest of this paper is organized as follows: Section 2
describes the experiment setup and path following algorithm. Characterization of the force field training algorithm is
described in Section 3. The performance of the forcefeedback joystick is assessed by testing on typically developing toddlers in Section 4, who were seated on the mobile
robot and drove the vehicle using both conventional and
force-feedback joysticks. Training results for two developmentally delayed children with spina-bifida and cerebral
palsy are provided in Section 5 who drove the robot while
sitting on it using a force-feedback joystick.
2
377
Fig. 2. A schematic of the experimental setup, its components, and data
flow from and to a child driver.
of a mobile robot, sensors, and a commercially available
force-feedback joystick. Fig. 2 shows the schematics of
various modules of the experiment testbed. The forcefeedback joystick is an Immersion Impulse Stick that can
provide continuous force of 8.5 N and peak force of 14.5 N.
The joystick interface is through DirectX, which can read
joystick position and apply forces on the hand’s driver. The
mobile robot is a differentially driven two-wheel Pioneer
3-DX robot equipped with encoders to record trajectory. C++
program interfaces were developed in-house using on-board
libraries with access to current position and orientation of the
robot, and joystick position. The in-house developed
routines prescribe forces to be applied by the joystick on
the hand of the user.
2.2 Training Path and Line Following Strategy
The training path, shown in Fig. 3, is chosen to consist of three
straight lines interspersed with a right and a left turn. The
choice of the path is motivated to train the children to turn
both left and right.
As one would expect, a robot can autonomously follow
such a path using a number of available control laws, which
are generally classified as “line following” strategies. The
research challenge is if young driver will learn a steering
strategy to track the lines, when assisted by the forcefeedback joystick and an appropriate training method.
The kinematic model of a two-wheel differentially driven
mobile robot has the following form:
EXPERIMENT SETUP AND TRAINING ALGORITHM
2.1 Training Hardware
Fig. 1 shows two child drivers who underwent training with
a custom made and assembled experiment setup consisting
Fig. 3. The training path consists of three black lines, driving in straight
line, a right turn, and a left turn.
378
IEEE TRANSACTIONS ON HAPTICS,
Fig. 4. (i) Schematic of a robot intended to follow a straight path inclined
at an angle ’. (ii) Simulation of the robot trajectory using an autonomous
line following algorithm. Initial condition: ðx; y; Þ ¼ ð0; 0; =2Þ. k1 ¼ 4,
k2 ¼ 8.
8
< x_ c ¼ v cos y_ ¼ v sin : _c
¼ !;
ð1Þ
where, xc and yc are coordinates of the robot center and is
its orientation. The inputs to the robot are the translational
velocity v and rotational velocity !.
Fig. 4i shows the schematic of a robot given the goal to
follow a line inclined at ’ from the horizontal. The parameter
d is the normal distance between the robot center and the
inclined path. The current heading of the robot is shown at an
angle from the line. A line following algorithm, such
as [26], is an error correcting control law that specifies the
inputs v and ! such that d ! 0 and ! 0 as time increases.
This control law is given by
v ¼ vdes
ð2Þ
! ¼ k1 d k tan ;
vdes cos NO. 4,
OCTOBER-DECEMBER 2012
Fig. 5. (i) Force field shown by virtual walls around a desired nominal
joystick direction. (ii) Handle force within the cone angle 2 is zero. A
representative 3D map of the handle force outside the cone with ¼ 15
and ¼ 0. The damping effect is not shown in this map.
desired motion of an autonomously driven robot. However,
in experiments, the speed commands are given by the child
driver through the joystick. Hence, v and ! commands need
to be mapped first to the motion of the joystick.
A joystick predominantly has two motions—forward/
backward and left/right. We map pure forward/backward
motion of the joystick to forward/backward motion of
the vehicle along the heading direction. The pure side to side
motion of the joystick is mapped to pure rotation of the
vehicle. In practice, we scale forward/backward joystick
position using vmax and side to side joystick position using
!max . Hence, given the desired control input v and ! from the
controller (2), the ideal joystick movement direction is
mapped to
¼ arctan
2
where vdes ¼ vmax ¼ 0:3 m=sec. When the robot is facing
perpendicular to the line, cosðÞ ! 0, we set ! to be the
maximum value (!max ¼ 26 =sec) that rotate the robot to
the line direction. It is important to note that this is only one
of many control laws that will allow the errors d and to
asymptotically go to zero. Also, the speed of convergence
and shape of the simulated path will depend on the choice
of the gains k1 , k2 .
In the implementation of such a control law, with the path
given in Fig. 3, we need to have a way to designate which one
of the three path segments is the desired path for the
controller at any given position of the robot. This is achieved
via angle bisectors, similar to a Voronoi diagram, which
delineates regions closest to the specific lines. We also
introduce a look-ahead distance which is equal to the robot
radius (dl ¼ 0:25 m). When the distance from the robot to the
next line is within dl , the robot will be switched to follow
the next line. Hence, the training area is divided into three
regions: I, II, and III (Fig. 3) associated with the first, second,
and the third line segments. Once the robot crosses into a new
region, it switches to a new line to be tracked. Fig. 4ii shows
the simulation of path following when this strategy is applied
to the governing (1), describing the mobile robot.
VOL. 5,
v
vmax
!
!max
¼ arctan
CREATION OF THE FORCE FIELD
The speeds v and ! computed, via (2), using the line
following strategy are the ideal commands that will result in
max
!
:
ð3Þ
The force field is defined in terms of a cone of angle 2
around the nominal direction of the joystick motion .
Consistent with the “assist as needed” paradigm for training,
no force field is applied on the hand, if the driver initiates a
joystick motion within the cone. Fig. 5i shows graphically
four regions around this instantaneous desired direction.
Three force effects are defined, which qualitatively are:
1.
Virtual wall effect—applies a restoring force to bring
the handle of the joystick back to Region 1. This force is
normal to the virtual wall and proportional to the
distance from the wall. The unit vector along the
virtual wall between Region 1 and Region 2a/2b is
w ¼ ½cosð Þ; sinð ÞT :
ð4Þ
Then, the virtual wall effect can be represented by
Fw ¼ kc ½ðpT wÞw p;
2.
ð5Þ
where p ¼ ½xl ; yl T is the joystick handle position.
Centering effect—applies a restoring force to bring the
joystick handle back to the center, represented by
Fc ¼ kc p:
3
!
ð6Þ
The coefficient kc is selected so that when p reaches
its max value, kc p will be the max allowable force
input in DirectX.
AGRAWAL ET AL.: TRAINING TODDLERS SEATED ON MOBILE ROBOTS TO STEER USING FORCE-FEEDBACK JOYSTICK
Fig. 6. (a) An illustration of the deviation area from the desired path,
shown in yellow. (b) Areas 1, 2, and 3 are calculated once, twice, and
three times, respectively, due to the back and forth driving.
3.
Damping effect—applies force on the joystick handle
in a direction opposite to its displacement. This force
prevents chattering of the joystick. Mathematically,
Fd ¼ kd ½x_ l ; y_ l T ;
ð7Þ
where x_ l ; y_ l are the joystick tip speeds in the joystick
frame. The coefficient kd is selected to be the minimal
value so that the joystick handle does not vibrate.
The haptic forces in the four regions of Fig. 5i are as follows:
Region 1: Damping effect to stabilize the joystick.
F ¼ Fd .
2. Region 2a/2b: Vector sum of virtual wall and
damping effects. F ¼ Fw þ Fd .
3. Region 3: Vector sum of centering and damping
effects, F ¼ Fc þ Fd .
A haptic force field with the above choice is shown in
Fig. 5ii. The z-coordinate represents the force magnitude.
The x-y plane represents the joystick workspace. Please note
that this choice of force field varies continuously over the
joystick workspace and thus avoids any sharp and jerky
changes in the force.
1.
4
DRIVING EXPERIMENTS FOR TYPICALLY
DEVELOPING TODDLERS
4.1 Protocol
Experiments were conducted with 10 typically developing toddlers, randomly assigned to two groups. The
training group included five toddlers with an average
age 31:0 2:5 months, and was trained to drive with the
force field. The control group also included five toddlers
with an average age 30:6 3:9 months, and was trained
to drive without the force field. The parents of all
children signed the consent form approved by the
University of Delaware Institutional Review Board.
Toddlers that young do not understand instructions such
as “drive the robot to follow the lines on the ground.” To
accommodate their behavior, a trainer stood at each turning
point on the path to encourage the child to come to that
point. The trainer always stood one robot radius ahead of
the turning point, and was notified and moved on to the
next turning point or the goal once the child reached the
next region in the training area (Fig. 3). Note that the trainer
379
Fig. 7. Deviation area of the two groups. Trials 1 and 2 are the baseline.
Trials 3-7, 8-12, and 13-17 are from Days 1, 2, and 3, respectively.
Trials 18 and 19 are the final test. The error bar shows 1 STD.
never instructed the child on how to push the joystick
handle to turn. Trainer’s effort can vary across days.
However, since the trainer was unaware if the kid being
trained was from the control group or in the training group,
we believe that this should not substantially affect the
results. The training consisted of three stages.
Stage 1 (Baseline): Two trials without force field
were collected on the first day for both groups.
. Stage 2 (Training): The stage was divided into three
nonconsecutive days to accommodate the limited
attention spans of very young children. During each
day, a toddler in the training group was trained with
the force field for four trials. A fifth trial was
collected without the force field. The control group
completed five trials without the force field.
. Stage 3 (Final test): In order to show that toddlers
actually learned the driving behavior but not the
specific course, we asked the children to drive along
a mirrored path at a different location one week after
Stage 2. In the final test, the path sequence was
straight, left turn, straight, right turn, straight.
The data on robot position and total travel time are
recorded and used for comparisons. We calculated the
deviation from the desired path by the area shown in
Fig. 6a. This area is obtained by numerical integration. Note
this measurement will give penalty to redundant paths,
which was assumed to be a sign of inexperience in driving, as
shown by Fig. 6b.
.
4.2 Results
The experiment results are shown in Figs. 7 and 8. All sets of
data are tested for normality by Lilliefors test [27] before any
statistical analysis. From the data presented, we can make the
following observations:
1.
The performance of both groups improved, illustrated by the paired t-test on Trials 2 and 17. For the
control group, p ¼ 0:032, while for the training group,
p ¼ 0:005. However, if we compare the error reduction, the error of the training group decreased
significantly more than the control group (p ¼ 0:011,
Fig. 9). Moreover, initially there is no significant
difference between the two groups (t-test on Trial 2 of
the two groups, p ¼ 0:980). After the training, Trial 17
380
IEEE TRANSACTIONS ON HAPTICS,
VOL. 5,
NO. 4,
OCTOBER-DECEMBER 2012
Fig. 8. Travel time of the two groups. Trials 1 and 2 are the baseline.
Trials 3-7, 8-12, and 13-17 are from Days 1, 2, and 3, respectively.
Trials 18 and 19 are the final test. The error bar shows 1 STD.
2.
3.
4.
of the training group is significantly lower than the
control group (t-test, p ¼ 0:010). Hence, one can
conclude that the performance increase in the training
group is due to the force feedback (Also see Fig. 10).
The mean error of the post-training (Trial 7) of the first
day was lower than some of the training trials of the
same day. Note that toddlers in our experiment are
strong enough to override the force field. We observed
that sometimes, one of the toddlers lost attention and
performed very badly, resulting in a high mean error.
In this situation, the STD was also high. As the training
went on, it happened less and less. And we see that for
Days 2 and 3, the error of the post-training was higher
than those of the training trials.
We did not observe any special pattern in the time of
completion data, in line with [14]. The average time of
both groups decreased over three days. However,
statistical analysis reveals no significant difference
between Trials 2 and 17 (paired t-test, p ¼ 0:319 for the
control group and p ¼ 0:170 for the training Group).
Also there is no significant difference between the two
groups for the last trial (p ¼ 0:383).
Note that short travel time does not necessarily
mean high driving skills. If the child drives straight
ahead without turning, this would naturally result in
a short time.
In the final test one week after Stage 2, the performance of the training group was no worse than Trial
17 (also see Fig. 11). Although the final test path is only
a mirrored path at a different location, this at least
suggests that the training group retained the skills
they have learned at least one week after the training.
Fig. 9. Error decrease of the two groups. The error bar shows 1 STD.
Fig. 10. Comparison of the second trial of the baseline and the last trial
between the two groups.
5
DRIVING EXPERIMENTS FOR SPECIAL NEEDS
TODDLERS
5.1 Protocol
Our ultimate goal is to train children with special needs to
learn high-level driving skills. Thus experiments were
carried out with two atypically developing children—a two
years old with spina bifida and a three years old with cerebral
Fig. 11. Comparison of the final test between the two groups.
AGRAWAL ET AL.: TRAINING TODDLERS SEATED ON MOBILE ROBOTS TO STEER USING FORCE-FEEDBACK JOYSTICK
381
Fig. 12. Error from the desired path over six days of training. Note that
there are three data collecting sessions each day that include
pretraining, training session with the force field, and one post-training.
Session 16 is the final test of Day 6. The deviation area from the desired
path decreases continuously over the days for pretraining or posttraining data. Note that on a particular day, the training helps lower this
deviation but eventually plateaus by the end of the fifth day.
palsy. The child with spina bifida had good control of his
hand movement but lacked the ability to walk and balance
himself, while the child with cerebral palsy had decreased
control of hand movement and coordination. The parents of
both children signed the consent form approved by the
University of Delaware Institutional Review Board.
Each training day consisted of three sessions: Pretraining
without force field, Training, and Post-training without force
field. Pre- and Post-training sessions had two trials each
while the Training session had four trials. Total training time
in each day was about 20 minutes. The training was repeated
for five nonconsecutive days. A trainer stood at a turning
point on the path encouraging the child to come to that point
and moved on to the next turning point or the goal once the
child reached the turning point. This was repeated over all
sessions and trials.
To test if the children would be able to retain this
acquired skill later after the training is complete, they were
tested in the mirrored path two weeks after the 5-day
training was complete.
Fig. 13. Pretraining data on Day 1 and Post-training data on Day 5—both
without force fields (i) Infant 1, (ii) Infant 2.
3.
During day 1, the children could not turn or follow
the path. By Days 4 and 5, the children could
successfully navigate the vehicle negotiating the
turns without the force field.
The results of the final test are shown in Fig. 14 with
the following observations:
a.
b.
the two children can successfully complete the
course,
path deviation errors shown in Fig. 12 are
comparable to those during the post-training on
the fifth day of training. These results suggest that
the children were able to learn the behaviors of
turning and line following and could retain these
at least two weeks after training.
5.2 Results
Fig. 12 shows the deviation area between the desired and the
actual paths for the two child subjects. Similar to typically
developing subjects in the last section, we did not observe a
statistically significant pattern. The time data are noisy and
thus omitted.
Due to the nature of this pilot study with only two special
needs children, we did not perform statistical analysis.
However, certain qualitative observations can be made from
the pilot data.
1.
2.
The force field provided assistance to the special
needs toddler. When the force field was turned on,
children tracked the path better, as shown in Fig. 12.
The deviation area from the desired path consistently
decreased during the five days of training (Figs. 12
and 13) eventually reaching a plateau after four days.
Fig. 14. Paths after two weeks of completion of training in a different
configuration of turns.
382
6
IEEE TRANSACTIONS ON HAPTICS,
DISCUSSION AND CONCLUSIONS
The goal of the present study is to develop a haptic guidance
approach using a force-feedback joystick to enhance motor
learning of a steering task. A control law motivated from
autonomous control of mobile robots was used and subjects
were trained to learn this algorithm using a force-feedback
joystick.
Effectiveness of the system was demonstrated by a
group study on toddlers who were trained to make turns
using a force-feedback joystick and an “assist-as-needed”
learning paradigm. Subjects in the training group outperformed the control group significantly after the training
in terms of driving error. This paper also presents a case
study with two special needs children, under three years
old, with spina bifida and cerebral palsy. Pretraining data
for the young drivers on Day 1 showed inability to follow a
desired path with turns. After five nonconsecutive days of
training, the data showed that children learned to control
the joystick, without haptic guidance, to make right-angled
turns. The performance improved over five days of training
in both children.
We also applied this strategy on children with special
needs, under three years old, to determine if they could learn
to make sharp turns and follow lines with the robot. The two
children selected for this case study were medically different
in their diagnoses. The child with spina bifida had good
control of his hand movement but lacked the ability to walk
and balance himself. The child with cerebral palsy had
decreased control of hand movement and coordination.
While the two children had different levels of hand function,
coordination, and balance, Fig. 13 shows that both children
were able to successfully learn to make turns and follow lines
in about five sessions of force field training on nonconsecutive days. Both children learned quickly in the first two days
of training and could refine these over the following sessions.
Subjects in our experiment received guidance only when
the error was large enough. The task difficulty did not
decrease too much due to the force field. We believe by
providing appropriate haptic guidance, we can enhance
motor learning without having negative effects. Also, the
initial skills of our subjects were low. Researchers hypothesized that haptic guidance may be more beneficial than error
amplification method for less skilled subjects [28].
One natural question to ask is whether the toddlers simply
learned the specifics of the path or if they really learned the
behavior of steering. Also, would they be able to retain this
acquired skill later after the training is complete. In order to
answer these questions, subjects were retested at least one
week after the training was complete, but in a different
configuration and at a different location. The results suggest
that the toddlers were in fact able to learn to steer and retain
this behavior at least one week after the training.
In conclusion, this paper presents a haptic guidance and
training method to enhance toddler learning of a steering
task and demonstrates the effectiveness of the system by a
group study on toddlers and a case study on two special
needs toddlers. We believe that this study provides the
preliminary results that could motivate a more extensive and
long term clinical study in future with a larger number of
special-needs children.,
VOL. 5,
NO. 4,
OCTOBER-DECEMBER 2012
ACKNOWLEDGMENTS
The authors would like to thank Allison Brown, Christine
MacDonald, Manasa Sridhar, and Terri Peffley for their help
during child experimentation. They acknowledge financial
support from National Institute of Health under grant
HD047468 and US National Science Foundation (NSF)
under grant NSF0745833. This research is supported by
grants from National Science Foundation and National
Institute of Health.
REFERENCES
[1]
[2]
[3]
[4]
[5]
[6]
[7]
[8]
[9]
[10]
[11]
[12]
[13]
[14]
[15]
[16]
[17]
[18]
[19]
J.J. Campos, D.I. Anderson, M.A. Barbu-Roth, E.M. Hubbard, M.J.
Hertenstein, and D. Witherington, “Travel Broadens the Mind,”
Infancy, vol. 1, no. 2, pp. 149-219, 2000.
D.I. Anderson, J.J. Campos, D.E. Anderson, T.D. Thomas, D.C.
Witherington, I. Uchiyama, and M.A. Barbru-Roth, “The Flip Side
of Perception-Action Coupling: Locomotor Experience and the
Ontogeny of Visual-Postural Coupling,” Human Movement Science,
vol. 20, nos. 4/5, pp. 461-487, 2001.
J. Wu et al., “Exploring Effects of Different Treadmill Interventions on Walking Onset and Gait Patterns in Infants with Down
Syndrome,” Developmental Medicine and Child Neurology, vol. 49,
no. 11, pp. 839-45, 2007.
C. Butler, “Effects of Powered Mobility on Self-initiated Behaviors
of Very Young Children with Locomotor Disability,” Developmental Medicine and Child Neurology, vol 28, no. 3, pp. 325-32, 1986.
D. Teft, P. Guerette, and J. Furumasu, “Cognitive Predictors of
Young Children’s Readiness for Powered Mobility,” Developmental
Medicine and Child Neurology, vol. 41, no. 10, pp. 665-70, 1999.
J.C. Galloway, J.C. Ryu, and S.K. Agrawal, “Babies Driving
Robots: Self-Generated Mobility in Very Young Infants,” Intelligent
Service Robotics, vol. 1, no. 2, pp. 123-134, 2008.
A. Lynch, “Robot Assisted Mobility for Very Young Infants,” PhD
thesis, Univ. of Delaware, 2009.
C. Ragonesi, X. Chen, S.K. Agrawal, and J.C. Galloway, “Power
Mobility and Socialization in Preschool: A Case Report on a Child
with Cerebral Palsy,” Pediatric Physical Therapy, vol. 22, no. 3,
pp. 322-329, 2010.
C.T. Ramey and S.L. Ramey, “Early Intervention and Early
Experience,” Am. Psychologist, vol. 53, no. 2, pp. 109-120, 1998.
S. Han and J. Lee, “Tele-Operation of a Mobile Robot Using a
Force Reflection Joystick with a Single Hall Sensor,” Proc. IEEE
16th Int’l Conf. Robot & Human Interactive Comm., Aug. 2007.
X. Wang, G. Seet, M. Lau, E. Low, and K.C. Tan, “Exploiting Force
Feedback in Pilot Training and Control of an Underwater Robotics
Vehicle: An Implementation in LabVIEW,” OCEANS ’00: Proc.
MTS/IEEE Conf. and Exhibition, vol. 3, pp. 2037-2042, 2000.
F.J. Rujbio-Sierra, R.W. Stark, S. Thalhammer, and W.M. Heckl,
“Force-Feedback Joystick as a Low-Cost Haptic Interface for an
Atomic-Force-Microscopy Nanomanipulator,” Applied Physics a
Materials Science and Processing, vol. 76, pp. 903-906, 2003.
R.C. Luo, C. Hu, T. Chen, and M. Lin, “Force Reflective Feedback
Control for Intelligent Wheelchairs,” Proc. IEEE/RSJ Int’l Conf.
Intelligent Robots and Systems, 1999.
S. Lee, G.S. Sukhatme, G.J. Kim, and C.M. Park, “Haptic Control of
a Mobile Robot: A User Study,” Proc. IEEE/RSJ Int’l Conf.
Intelligent Robots and Systems, Oct. 2002.
A. Fattouh, M. Sahnoun, and G. Bourhis, “Force Feedback Joystick
Control of a Powered Wheelchair: Preliminary Study,” Proc. IEEE
Int’l Conf. Systems, Man and Cybernetics, 2004.
G. Bourhis and M. Sahnoun, “Assisted Control Mode for a Smart
Wheelchair,” Proc. IEEE 10th Int’l Conf. Rehabilitation Robotics, June
2007.
Y. Li, V. Patoglu, and M.K. O’Malley, “Negative Efficacy of Fixed
Gain Error Reducing Shared Control for Training in Virtual
Environments,” ACM Trans. Applied Perception, vol. 6, no. 1, pp. 121, 2009.
J. Liu, S. Cramer, and D. Reinkensmeyer, “Learning to Perform a
New Movement with Robotic Assistance: Comparison of Haptic
Guidance and Visual Demonstration,” J. Neuroeng. and Rehabilitation, vol. 3, pp. 495-506, 2006.
R.A. Schmidt and T.D. Lee, Motor Control and Learning: A
Behavioral Emphasis, fourth ed. Human Kinetics, 2005.
AGRAWAL ET AL.: TRAINING TODDLERS SEATED ON MOBILE ROBOTS TO STEER USING FORCE-FEEDBACK JOYSTICK
[20] J. Bluteau, S. Coquillart, Y. Payan, and E. Gentaz, “Haptic
Guidance Improves the Visuo-Manual Tracking of Trajectories,”
PLoS one, vol. 3, p. e1775, 2008.
[21] L. Marchal-Crespo and D. Reinkensmeyer, “Haptic Guidance Can
Enhance Motor Learning of a Steering Task,” J. Motor Behavior,
vol. 40, no. 6, pp. 545-556, 2008.
[22] S.K. Banala, S.H. Kim, S.K. Agrawal, and J.P. Scholz, “Robot
Assisted Gait Training with Active Leg Exoskeleton (ALEX),”
IEEE Trans. Neural Systems and Rehabilitation Eng., vol. 17, no. 1,
pp. 2-8, Feb. 2009.
[23] R. Riener, L. Lunenburger, S. Jezernik, M. Anderschitz, G.
Colombo, and V. Dietz, “Patient-Cooperative Strategies for
Robot-Aided Treadmill Training: First Experimental Results,”
IEEE Trans. Neural Systems and Rehabilitation Eng., vol. 12, no. 2,
pp. 380-94, Sept. 2005.
[24] S.K. Agrawal, X. Chen, and J.C. Galloway, “Training Special
Needs Infants to Drive Mobile Robots Using Force-feedback
Joystick,” Proc. IEEE Int’l Conf. Robotics and Automation, 2010.
[25] L. Marchal-Crespo, J. Furumasu, and D.J. Reinkensmeyer, “A
Robotic Wheelchair Trainer: Design Overview and a Feasibility
Study,” J. Neuroeng. and Rehabilitation, vol. 7, p. 40, 2010.
[26] A. Bemporad, M. Di Marco, and A. Tesi, “Wall-Following
Controllers for Sonar-Based Mobile Robots,” Proc. IEEE 36th Conf.
Decision and Control, 1997.
[27] H. Lilliefors, “On the Kolmogorov-Smirnov Test for Normality
with Mean and Variance Unknown,” J. Am. Statistical Assoc., vol.
62, pp. 399-402, 1967.
[28] L. Marchal-Crespo, S.A. Mc Hughen, S.C. Cramer, and D.J.
Reinkensmeyer, “The Effect of Haptic Guidance, Aging, and
Initial Skill Level on Motor Learning of a Steering Task,”
Experimental Brain Research, vol. 201, no. 2 pp. 209-220, 2010.
Sunil K. Agrawal received the PhD degree in
mechanical engineering from Stanford University, Stanford, California, in 1990. He has
published close to 250 journal and conference
papers and two books in the areas of controlled
mechanical systems, dynamic optimization, and
robotics. He is a fellow of the ASME and his
other honors include a Presidential Faculty
Fellowship from the White House in 1994, a
Bessel Prize from Germany in 2003, and a
Humboldt US Senior Scientist Award in 2007. He has served on editorial
boards of several journals published by the ASME and IEEE.
383
Xi Chen received the BE degree in automation
from Nankai University, Tianjin, China. He is
currently working toward the PhD degree in the
Department of Mechanical Engineering at the
University of Delaware, Newark. His research
interests are in mobile robot control, haptic
guidance, and early mobility training of special
needs children.
Christina Ragonesi received the BS degree in
biology in 2008 from Grove City College, Grove
City, Pennsylvania. She is currently a doctor of
physical therapy student and working toward the
PhD degree in biomechanics and movement
sciences at the University of Delaware, Newark.
James C. Galloway received the PhD degree in
physiological sciences from the University of
Arizona, Tucson. He was a NIH postdoctoral
fellow with Esther Thelen at Indiana University in
Bloomington, Indiana. He is currently an associate professor in the Department of Physical
Therapy, University of Delaware in Newark. His
research interests include the assessment and
intervention for mobility impairments in young
children including the development of novel
biodriven devices and therapeutic environments to maximize children’s
physical and social exploration.
. For more information on this or any other computing topic,
please visit our Digital Library at www.computer.org/publications/dlib.